Geometría Analítica
Anuncio

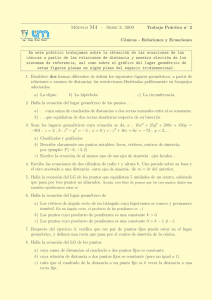
Introducción a la geometrı́a analı́tica Prof. Yoel Gutiérrez 1 1.1 Sistema de coordenadas rectangulares sistema coordenado rectangular El sistema coordenado rectangular, indicado en la figura 1, consta de dos rectas reales X y Y , llamadas ejes de coordenadas, perpendiculares entre sı́. La recta X se llama eje X o eje de las abscisas, La recta Y es el eje Y o eje de las ordenadas; y su punto de intersección 0, el origen. Estos ejes coordenados dividen al plano en cuatro regiones llamadas cuadrantes tal como se indica en la figura 1. La dirección positiva del eje x es hacia la derecha; la dirección positiva del eje Y , hacia arriba. Y Y II(-,+) y I(+,+) . P(x,y) Q y2 1 0 III(-,-) 1 x P X IV(+,-) x1 Figura 1 y1 R 0 x2 X Figura 2 A cada punto P del plano se le puede asignar un par de números, llamados coordenadas del punto. Si una recta horizontal y una vertical que pasen por P intersecan los ejes X e Y en x e y, respectivamente, entonces P tiene coordenadas (x, y) (ver la figura 1). Llamaremos a (x, y) un par ordenado de números debido a que tiene importancia cual de los dos va primero. El primer número, x, es la abscisa; el segundo número, b, es la ordenada. Recı́procamente, tómese un par ordenado de números cualesquiera (x, y). La recta vertical que pasa por x en el eje de las abscisas y la horizontal que pasa por y en el eje de las ordenadas se cortan en un punto P , cuyas coordenadas son (x, y). Es evidente que a cada punto P del plano coordenado le corresponden uno y solamente 1 Introducción a la geometrı́a analı́tica. Yoel Gutiérrez - 2005 2 un par de coordenadas (x, y). Recı́procamente, un par de coordenadas (x, y) cualesquiera determina uno y solamente un punto en el plano coordenado. 1.2 Distancia entre dos puntos Consideremos dos puntos cualesquiera P y Q, con coordenadas (x1 , y1 ) y (x2 , y2 ), respectivamente. Junto con R; el punto de coordenadas (x2 , y1 ); P y Q, son los vértices de un triángulo rectángulo (ver figura 2). Las longitudes de los segmentos P R y RQ son |x2 − x1 | y |y2 − y1 |, respectivamente. Cuando se aplica el teorema de Pitágoras obtenemos que la distancia d entre los puntos P y Q es d= 1.3 p (x2 − x1 )2 + (y2 − y1 )2 Punto medio de un segmento Sean P (x1 , y1 ) y Q(x2 , y2 ), con x1 < x2 , los extremos del segmento P Q como en la figura 3. Sea M (x, y) el punto medio de dicho segmento. Los tres segmentos paralelos P A, M B y QC, determinan dos segmentos P M y M Q de igual longitud, por los tanto; por la geometrı́a elemental; los segmentos AB y CB también tienen la misma longitud, esto es: x − x1 = x2 − x. x1 + x2 De donde, despejando x se tiene que x = . 2 y1 + y2 En forma análoga se deduce que y = . 2 De esto se concluye que las coordenadas del punto medio del segmento de extremos P (x1 , y1 ) y Q(x2 , y2 ) son ³x + x y + y ´ 1 2 1 2 M , 2 2 Y Y L1 L Q y2 M y P y1 a1 a A B C x x x1 2 X X Figura 3 Figura 4 Introducción a la geometrı́a analı́tica. 1.4 Yoel Gutiérrez - 2005 3 Gráfica de una ecuación y lugares geométricos Supongamos que se nos da una ecuación de dos variables, x e y, que podemos escribir, brevemente, en la forma f (x, y) = 0. (1.1) En general, hay un número infinito de pares de valores de x e y que satisfacen esta ecuación. Cada uno de tales pares de valores reales se toman como las coordenadas (x, y) de un punto en el plano real. El conjunto de los puntos, y solamente de aquellos puntos cuyas coordenadas satisfagan la ecuación (1.1), se llama gráfica de la ecuación, o bien, su lugar geométrico. 1.5 Ecuación general de segundo grado En lo sucesivo haremos un estudio de la ecuación genera de segundo grado, Ax2 + Bxy + cy 2 + Dx + Ey + F = 0. (1.2) En particular, consideraremos el caso en que B 6= 0. 2 La recta Admitiremos la existencia de la linea recta como un término primitivo. 2.1 Pendiente de una recta Se llama ángulo de inclinación de una recta el formado por la parte positiva del eje X y la recta, cuando ésta se considera dirigida hacia arriba. Ası́, el ángulo de inclinación de la recta L (Ver figura 4) es α, y de L1 es α1 . Evidentemente, α puede tener cualquier valor comprendido entre 0o y 180o ; es decir, su intervalo de variación está dado por 00 ≤ α ≤ 180o . (2.1) Se llama pendiente de una recta a la tangente de su ángulo de inclinación. La pendiente de una recta se designa comúnmente por la letra m. Por tanto, podemos escribir m = tan α. (2.2) De (2.1) y (2.2) se ve que la pendiente puede tomar todos los valores reales. Si α es agudo, la pendiente es positiva, como para la recta L e la figura 4; si α1 es obtuso, como para la recta L1 , la pendiente es negativa; Si α = 00 o α = 180o , la pendiente es cero. Cualquier recta que coincida o sea paralela al eje Y será perpendicular al eje X, y su ángulo de Introducción a la geometrı́a analı́tica. Yoel Gutiérrez - 2005 4 inclinación será de 90o . Como tan 90o no está definida, la pendiente de una recta paralela al eje Y no existe. Theorem 1 Si P1 (x1 , y1 ) y P2 (x2 , y2 ) son dos puntos diferentes cualesquiera de una recta, la pendiente de la recta es y2 − y1 m= , x1 6= x2 . (2.3) x2 − x1 Prueba: Consideremos la recta L de la figura 5, determinada por los puntos P1 y P2 , y sea α su ángulo de inclinación. En el triángulo rectángulo P1 P2 A que se muestra en la figura 5, la longitud del segmento P1 A es x2 − x1 y, la longitud del segmento P2 A es y2 − y1 . Por trigonometrı́a, tendremos m = tan α = y2 − y1 , x2 − x1 x1 6= x2 . Y y1 L P2 y2 Y P1 a A r C . a x1 Figura 5 x2 X X Figura 6 Observaciones (1) El valor de m dado por la fórmula (2.3) no está definido analı́ticamente para x1 = x2 . En este caso, la interpretación geométrica es que una recta determinada por dos puntos diferentes con abscisas iguales es paralela al eje Y , por tanto, como se afirmó anteriormente, no tiene pendiente. 1 (2) El orden en que se toman las ordenadas en (2.3) no tiene importancia, ya que xy22 −y = −x1 y1 −y2 . Se debe evitar, en cambio, el error muy frecuente de tomar las ordenadas en un x1 −x2 orden y las abscisas en el orden contrario. Ya que esto cambia el signo de m. (3) Podemos deducir las condiciones de paralelismo y perpendicularidad de dos rectas, conocidas sus pendientes. 1. Una condición necesaria y suficiente para que dos rectas no verticales sean paralelas es que sus pendientes sean iguales. Introducción a la geometrı́a analı́tica. Yoel Gutiérrez - 2005 5 2. Una condición necesaria y suficiente para que dos rectas no paralelas a los ejes coordenados sean perpendiculares entre sı́, es que el producto de sus pendientes sea igual a -1. 2.2 Diferentes formas de la ecuación de una recta (1) Ecuación de la recta que pasa por un punto y tiene una pendiente dada. La recta que pasa por el punto dado P1 (x1 , y1 ) y tiene la pendiente dada m, tiene por ecuación y − y1 = m(x − x1 ). (2.4) Como la ecuación (2.4) está dada en función de un punto y la pendiente, se llama, a veces, de la forma de punto y pendiente. (2) Una recta que coincide o es paralela al eje Y no tiene pendiente. Por la tanto, la ecuación (2.4) no puede representar a una recta de tal naturaleza. Para este caso, la ecuación de la recta es de la forma x = a, (2.5) en donde a e una constante real y representa la intersección de la recta con el eje X. Una recta es o no paralela al eje Y . Si es paralela al eje Y su ecuación es de la forma (2.5); si no es paralela a dicho eje, su pendiente está definida y su ecuación es de la forma (2.4). Como todas las rectas caen bajo una de estas clasificaciones, cualquiera otra forma de la ecuación de una recta debe deducirse, necesariamente, a una de estas dos formas. (3) Una recta que coincide o es paralela al eje X tiene pendiente 0. Por lo tanto, aplicando (2.4), se deduce que la ecuación de una recta de esta naturaleza es de la forma y = b, (2.6) en donde b es una constante real y representa la intersección de la recta con el eje Y . (4) Ecuación de la recta dada su pendiente y su ordenada en el origen. La recta cuya pendiente es m y cuya ordenada en el origen, es decir, su intersección con el eje Y , es b tiene por ecuación y = mx + b. (2.7) (5) Ecuación de la recta que pasa por dos puntos. La recta que pasa por dos puntos dados P1 (x1 , y1 ) y P2 (x2 , y2 ) tiene por ecuación y − y1 = y1 − y2 (x − x1 ), x1 − x2 x1 6= x2 . (2.8) Si x1 = x2 , la ecuación (2.8) no puede usarse. En este caso, la recta es paralela al eje Y , y su ecuación es x = x1 . Introducción a la geometrı́a analı́tica. Yoel Gutiérrez - 2005 6 (6) Ecuación simétrica de la recta. La recta cuyas intersecciones con los ejes X e Y son a 6= 0 y b 6= 0, respectivamente, tiene por ecuación x y + = 1. (2.9) a b Si a = 0, entonces también b = 0, y la forma simétrica no puede usarse. En este caso, solamente se conoce un punto, el origen, y no es suficiente para determinar una recta. Como una recta queda perfectamente determinada por dos cualesquiera de sus puntos, la manera más conveniente de trazar una recta a partir de su ecuación es determinar las dos intersecciones con los ejes. Si la recta pasa por el origen, basta determinar otro punto cuyas coordenadas satisfagan la ecuación. 2.3 Forma general de la ecuación de una recta Hemos visto que la ecuación de una recta cualquiera, en el plano coordenado, es de la forma lineal Ax + By + C = 0, (2.10) en donde ya sea A o B debe ser diferente de cero y C puede o no ser igual a cero. La ecuación (2.10) se llama la forma general de la ecuación de una recta. Ahora consideraremos el problema inverso, a saber, la ecuación lineal (2.10), ¿representa siempre una linea recta? Para contestar a esta pregunta examinaremos las dos formas posibles de la ecuación (2.10) con respecto al coeficiente de y, es decir, las formas para B = 0 y B 6= 0. CASO I. B = 0. Si B = 0, entonces A 6= 0, y la ecuación (2.10) se reduce a la forma C x=− , (2.11) A que es la ecuación de una recta paralela al eje Y . CASO II. B 6= 0. Si B 6= 0, podemos dividir la ecuación (2.10) por B, y entonces por transposición se reduce a la forma A C y =− x− , (2.12) B B A C que es la ecuación de una recta cuya pendiente es − B y cuya ordenada en el origen es − B . En consecuencia, vemos que en todos los casos la ecuación (2.10) representa una recta. 2.4 Posiciones relativas de dos rectas Consideremos dos rectas, cuyas ecuaciones forman un sistema de dos ecuaciones lineales con dos incógnitas ( Ax + By + C = 0, A0 x + B 0 y + C 0 = 0, Introducción a la geometrı́a analı́tica. Yoel Gutiérrez - 2005 7 1. El sistema tiene solución única, si y sólo si, las dos rectas se cortan en uno y solamente en un punto. 2. El sistema tiene solución infinita, si y sólo si, las dos rectas son coincidentes. 3. El sistema no tiene solución, si y sólo si, las dos rectas son paralelas y no coincidentes. 2.5 Distancia de una recta a un punto dado La distancia d de una recta, cuya ecuación es Ax + By + C = 0, a un punto dado P1 (x1 , y1 ), viene dada por |Ax1 + By1 + C| √ d= . A2 + B 2 Geométricamente, d representa la longitud del segmento de recta perpendicular de la recta al punto P1 . 3 La circunferencia Una Circunferencia es el lugar geométrico de un punto que se mueve en un plano de tal manera que se conserva siempre a una distancia constante de un punto fijo de ese plano. El punto fijo se llama centro de la circunferencia, y la distancia constante se llama radio. Designemos por C y r (figura 6), el centro y el radio de una circunferencia, respectivamente. Theorem 2 La circunferencia cuyo centro es el punto (h, k) y cuyo radio es la constante positiva r, tiene por ecuación (x − h)2 + (y − k)2 = r2 . (3.1) La ecuación (3.1) se conoce como la ecuación ordinaria o forma ordinaria de la ecuación de una circunferencia. En general, designaremos como forma ordinaria aquella ecuación de una curva que nos permite obtener más rápida y fácilmente sus caracterı́sticas importantes. Ası́, por ejemplo, en el caso de la ecuación (3.1) podemos obtener, inmediatamente, las coordenadas del centro y el radio. Theorem 3 (Forma general de la ecuación de una circunferencia) . Si los coeficientes A y C son iguales y no nulos, la ecuación Ax2 + Cy 2 + Dx + Ey + F = 0, (3.2) representa una circunferencia, un punto, o no representa ningún lugar geométrico real. Introducción a la geometrı́a analı́tica. Yoel Gutiérrez - 2005 8 Si se da la ecuación de una circunferencia en la forma general,, es conveniente que se reduzca la ecuación a la forma ordinaria por el método de completar cuadrados, para obtener el centro y el radio. 4 La parábola Una parábola es el lugar geométrico de un punto que se mueve en un plano de tal manera que su distancia de una recta fija, situada en el plano, es siempre igual a su distancia de un punto fijo del plano y que no pertenece a la recta. El punto fijo se llama foco y la recta fija directriz de la parábola. L1 D1 C1 L2 B1 D2 E A2 P L2 A V V1 F1. F B2 E2 .F2 V2 C L1 C2 D1 D2 B2 Figura 7 B1 A1 E1 Figura 8 Designemos por F y L1 (figura 7), el foco y la directriz de una parábola, respectivamente. La recta L2 que‘pasa por F y es perpendicular a L1 se llama eje de la parábola. Sea A el punto de intersección del eje y de la directriz. El punto V , punto medio del segmento AF , está, por definición, sobre la parábola; este punto se llama vértice. El segmento de recta B1 B2 , que une dos puntos cualesquiera diferentes de la parábola se llama cuerda; en particular, una cuerda que pasa por el foco como C1 C2 , se llama cuerda focal. La cuerda focal D1 D2 perpendicular al eje se llama lado recto. Si E es un punto cualquiera de la parábola, el segmento F P se radio radio focal de E, o radio vector. Theorem 4 La ecuación de un parábola de vértice (h, k) y eje paralelo al eje X, es de la forma (y − k)2 = 4p(x − h), siendo |p| la longitud del segmento del eje comprendido entre el foco y el vértice. Si p > 0, la parábola se abre hacia la derecha; si p < 0, la parábola se abre hacia la izquierda. Introducción a la geometrı́a analı́tica. Yoel Gutiérrez - 2005 9 Si el eje de la parábola es paralelo al eje Y , y el vértice es el punto (h, k), su ecuación es de la forma (x − h)2 = 4p(y − k). Si p > 0, la parábola se abre hacia arriba; si p < 0, la parábola se abre hacia abajo. 4.1 Forma general de la ecuación de una parábola (1) Toda ecuación de la forma Ax2 + Dx + Ey + F = 0, donde A 6= 0 y E 6= 0, representa una parábola cuyo eje es paralelo o coincidente con el eje Y . Si, en cambio, E = 0, la ecuación toma la forma Ax2 + Dx + F = 0, (4.1) que es una ecuación cuadrática en la única variable x. Si las raı́ces de (4.1) son reales y desiguales, digamos r1 y r2 , entonces la ecuación (4.1) puede escribirse en la forma (x − r1 )(x − r2 ) = 0, y el lugar geométrico correspondiente consta de dos rectas diferentes, cuyas ecuaciones son x = r1 y x = r2 , paralelas ambas al eje Y . Si la raı́ces de (4.1) son reales e iguales, el lugar geométrico consta de dos recta coincidentes representadas geométricamente por una sola recta paralela al eje Y . Finalmente, Si (4.1) no tiene raı́ces reales, no representa ningún lugar geométrico. (2) Toda ecuación de la forma Cy 2 + Dx + Ey + F = 0, donde C 6= 0 y D 6= 0, representa una parábola cuyo eje es paralelo o coincidente con el eje X. Si, en cambio, D = 0, la ecuación toma la forma Cy 2 + Ey + F = 0, (4.2) que es una ecuación cuadrática en la única variable y. Si las raı́ces de (4.2) son reales y desiguales, digamos r1 y r2 , entonces la ecuación (4.2) puede escribirse en la forma (y − r1 )(y − r2 ) = 0, y el lugar geométrico correspondiente consta de dos rectas diferentes, cuyas ecuaciones son y = r1 y y = r2 , paralelas ambas al eje X. Si la raı́ces de (4.2) son reales e iguales, el lugar geométrico consta de dos recta coincidentes representadas geométricamente por una sola recta paralela al eje X. Finalmente, Si (4.2) no tiene raı́ces reales, no representa ningún lugar geométrico. Introducción a la geometrı́a analı́tica. 5 Yoel Gutiérrez - 2005 10 La elipse Una elipse es el lugar geométrico de un punto que se mueve en un plano de tal manera que la suma de sus distancias a dos puntos fijos del plano, llamados focos, es siempre igual a una cantidad constante, mayor que la distancia entre los focos. En la figura 8 se ha dibujado una elipse. Los focos están designados por F1 y F2 . La recta L1 que pasa por los focos se llama eje focal. El eje focal corta a la elipse en dos puntos V1 y V2 , llamados vértices. La porción del eje focal comprendido entre los dos vértices, el segmento V1 V2 , se llama eje mayor. El punto medio C del eje mayor se lama centro. La recta L2 que pasa por C y es perpendicular al eje focal, se llama eje normal. El eje normal corta a la elipse en dos puntos, A1 y A2 , el segmento A1 A2 se llama eje menor. El segmento B1 B2 que une dos puntos diferentes cualesquiera de la elipse se llama cuerda. En particular, una cuerda que pasa por un foco, tal como D1 D2 se llama cuerda focal. una cuerda focal, tal como E1 E2 , perpendicular al eje focal se llama lado recto; evidentemente, por tener dos focos, la elipse tiene dos lados rectos. Si P es un punto cualquiera de la elipse, los segmentos F1 P y F2 P que unen los focos con el punto P se llaman radios vectores de P. Theorem 5 La ecuación de la elipse de centro el punto (h, k) y eje focal paralelo al eje X, es (x − h)2 (y − k)2 + = 1. a2 b2 Si el eje focal es paralelo al eje Y ; su ecuación es (x − h)2 (y − k)2 + = 1. b2 a2 Para cada elipse, 2a es la longitud del eje mayor, 2b es la del eje menor, c es la distancia del centro a cada foco, y a, b y c están ligadas por la relación a2 = b2 + c2 . También, para cada elipse, la longitud de cada uno de sus lados rectos es cidad e está dada por la fórmula √ c a2 − b2 < 1. e= = a a 2b2 a y la excentri- Theorem 6 Si los coeficientes A y C son del mismo signo, la ecuación Ax2 + Cy 2 + Dx + Ey + F = 0 representa una elipse de ejes paralelos a los ejes coordenados, o bien un punto, o no representa ningún lugar geométrico real. Introducción a la geometrı́a analı́tica. 6 Yoel Gutiérrez - 2005 11 La hipérbola Una hipérbola es el lugar geométrico de un punto que se mueve en un plano de tal manera que el valor absoluto de la diferencia de sus distancias a dos puntos fijos del plano, llamados focos, es siempre igual a una cantidad constante, positiva y menor que la distancia entre los focos. L4 L3 L2 F1 V1 . A1 C V2 F2 . L1 A2 P Figura 9 La hipérbola consta de dos ramas diferentes, cada una de longitud infinita. En la figura 9 se ha dibujado una posición de cada una de estas ramas; los focos están designados por F1 y F2 . La recta L1 que pasa por los focos se llama eje focal. El eje focal corta a la hipérbola en dos puntos V1 y V2 , llamados vértices. La porción del eje focal comprendido entre los dos vértices, el segmento V1 V2 , se llama eje transverso. El punto medio C del eje transverso se lama centro. La recta L2 que pasa por C y es perpendicular al eje focal, se llama eje normal. El eje normal no corta a la hipérbola; sin embargo, una porción definida de este eje, el segmento A1 A2 en la figura 11, se llama eje conjugado. En forma análoga que en una elipse, el segmento que une dos puntos diferentes cualesquiera de la hipérbola se llama cuerda. En particular, una cuerda que pasa por un foco, se llama cuerda focal. Una cuerda focal, perpendicular al eje focal se llama lado recto; evidentemente, por tener dos focos, la hipérbola tiene dos lados rectos. Si P es un punto cualquiera de la hipérbola, los segmentos F1 P y F2 P que unen los focos con el punto P se llaman radios vectores de P . Las rectas L3 y L4 en la figura 11, son ası́ntotas de la hipérbolas. Estas rectas son las prolongaciones de las diagonales del rectángulo de centro C que se muestra en la figura 9. Theorem 7 La ecuación de la hipérbola de centro el punto (h, k) y eje focal paralelo al eje X, es de la forma (x − h)2 (y − k)2 − = 1. a2 b2 Introducción a la geometrı́a analı́tica. Yoel Gutiérrez - 2005 12 Si el eje focal es paralelo al eje Y , su ecuación es (y − k)2 (x − h)2 − = 1. a2 b2 Para cada hipérbola, 2a es la longitud del eje transverso, 2b la del eje conjugado, c la distancia del centro a cada foco, y a, b y c están ligados por la ecuación c2 = a2 + b2 . También, para cada hipérbola, la longitud de cada uno de sus lados rectos es excentricidad e está dada por la fórmula √ c a2 + b2 e= = > 11. a a 2b2 a y la Theorem 8 Si los coeficientes A y C difieren en el signo, la ecuación Ax2 + Cy 2 + Dx + Ey + F = 0 representa una hipérbola de ejes paralelos a los coordenados, o un par de rectas que se cortan 7 Inecuaciones en el plano Trataremos inecuaciones cuya soluciones se representan geométricamente como una región en el plano. Para ello es necesario tener en consideración las siguientes observaciones que involucran a la recta y las cónicas. (1) Toda recta Ax + By + C = 0 (7.1) divide al plano en dos semiplanos. Para saber el signo que tiene el primer miembro de la ecuación de la recta (7.1) para los puntos del plano que no pertenecen a ella, basta hallar su valor numérico para un punto M de algunos de los dos semiplanos. Los valores numéricos correspondientes a los puntos del mismo semiplano que contiene a M tienen el mismo signo que el hallado para M . Los valores numéricos correspondientes a los puntos del semiplano que no contiene a M tienen signo contrario. (2) Los pares de coordenadas de los puntos exteriores a la circunferencia (x − h)2 + (y − k)2 = r2 son soluciones de la inecuación (x − h)2 + (y − k)2 > r2 Introducción a la geometrı́a analı́tica. Yoel Gutiérrez - 2005 13 y los pares de coordenadas de los interiores lo son de (x − h)2 + (y − k)2 < r2 . (3) La parábola divide al plano en dos regiones, la que contiene al foco y la que no lo contiene. Cuando debemos resolver una inecuación de la forma: (x − h)2 = 4p(y − k) se dibuja la parábola correspondiente y se prueba la inecuación con un punto (x, y) que no pertenezca a la curva. Si el par satisface la inecuación también lo satisfarán todos los puntos de la misma región. Si no la satisface, serán soluciones las coordenadas de los puntos de la otra región. (4) Los pares de coordenadas de los puntos exteriores a la elipse (x − h)2 (y − k)2 + =1 a2 b2 son soluciones de la inecuación (x − h)2 (y − k)2 + >1 a2 b2 y los pares de coordernadas de los interiores lo son de: (x − h)2 (y − k)2 + < 1. a2 b2 (5) La hipérbola divide al plano en tres regiones, una de ellas contiene al centro, cada una de las otras dos contiene un foco. Los pares de coordenada de los puntos de una de las regiones que contiene un foco de la hipérbola (x − h)2 (y − k)2 + =1 a2 b2 son soluciones de la inecuación (x − h)2 (y − k)2 + >1 a2 b2 y los pares de coordenas de los puntos de la región que contiene al centro, lo son de: (x − h)2 (y − k)2 + <1 a2 b2 Introducción a la geometrı́a analı́tica. 8 Yoel Gutiérrez - 2005 14 Ejercicios 8.1 Sistema de coordenadas rectangulares 1. Demuestre que los puntos (−5, 0), (0, 2) y (0, −2) son los vértices de un triángulo isósceles y calcular su área. 2. Demostrar que los puntos (2, −2), (−8, 4) y (5, 3) son los vértices de un triángulo rectángulo y hallar su área. √ √ 3. Demuestre que los puntos (2, 2 + 3), (5, 2) y (2, 2 − 3) son los vértices de un triángulo equilátero, calculando la distancia entre ellos. 4. Uno de los puntos extremos de un segmento es el punto (7, 8), y su punto medio es (4, 3). Hallar el otro extremo. 5. Los vértices de un triángulo son A(−1, 3), B(3, 5) y C(7, −1). Si D es el punto medio del lado AB y E es el punto medio del lado BC. Demostrar que la longitud del segmento DE es la mitad de la longitud del segmento AC. 8.2 La recta 1. Halar la ecuación de la recta que pasa por el punto (−2, 4) y (a) Tiene pendiente 7 . 16 (b) Es paralela a la recta 5x − 3y = −3. (c) Es perpendicular a la recta 5x − 3y = −3. (d) Es paralela al eje X. (e) Es paralela al eje Y . (f) Pasa por el origen. 2. Una recta L1 pasa por los puntos (3, 2) y (−4, −6) y otra recta L2 pasa por el punto (−7, 1) y el punto A cuya ordenada es -6. Hallar la abscisa del punto A, sabiendo que L1 es perpendicular a L2 . 3. Determine a t si la recta que pasa por (−1, 1) y (3, 2) es paralela a la recta que pasa por (0, 6) y (−8, 7). 4. Determine t si la recta que pasa por (−1, 1) y (1, 21 ) es perpendicular a la recta que pasa por (1, 12 ) y (t, t). Introducción a la geometrı́a analı́tica. Yoel Gutiérrez - 2005 15 5. Hallar el valor de k para que la recta kx + (k − 1)y − 18 = 0 sea paralela a la recta 4x + 3y + 7 = 0. 6. Hallar la distancia comprendida entre las rectas paralelas 3x − 4y + 8 = 0 y 6x − 8y + 9 = 0. 7. Trazar la representación gráfica de las siguientes ecuaciones. (a) y − 3 = 2(x + 1). (b) 2y − 4x = 12. (c) x+2 3 + y−1 2 = 1. (d) (y − x + 2)(2y + x − 4) = 0. (e) |x| + |y| = 1. (f) |x| − |y| = 1. 8. Se tienen dos rectas de ecuaciones, y = ax + c e y = bx + d. ¿Bajo que condiciones son iguales las abscisa al origen?¿En qué caso se intersecan ambas rectas? 9. Las medidas de temperaturas Fahrenheit (F ) y Celsius (C) están relacionadas por una ecuación lineal. (a) Hallar la ecuación que relaciona F y C, teniendo en cuenta que C = 0 cuando F = 32 y C = 100 cuando F = 212. (b) ¿Existe alguna temperatura para la que C = F ? De ser ası́, ¿qué temperatura es?. 8.3 La circunferencia 1. Para cada caso, encuentre la ecuación de la circunferencia que satisface las condiciones dadas. (a) Centro (3, −4) y radio 6. (b) El segmento que une (0, 0) con (6, −8) es un diámetro. (c) Pasa por (−3, 5) y el centro está en (1, −3). 2. Determine que lugar geométrico representa cada ecuación. Trazar la representación gráfica correspondiente para cada una. (a) x2 + y 2 + 1 = y. Introducción a la geometrı́a analı́tica. Yoel Gutiérrez - 2005 16 (b) 2x2 + 2y 2 − 6x + 10y + 7 = 0. (c) 4x2 + 4y 2 + 28x − 8y + 53 = 0. (d) 16x2 + 16y 2 − 64x + 8y + 177 = 0. 9 La parábola 1. Para cada uno de los ejercicios siguientes, hallar la ecuación para la parábola que satisface las condiciones dadas y dibujar la curva. (a) Vértice en (3, 2), foco en (3, 4). (b) Vértice en (4, 1), directriz x = 2. (c) Vértice en (4, 1), directriz y = −3. (d) Vértice en (4, −2), lado recto 8, abre hacia la derecha. 2. La trayectoria de un proyectil disparado desde el nivel del suelo es una parábola abierta hacia abajo. Si la altura máxima alcanzada por el proyectil es de 100 metros y su alcance horizontal es de 800 metros. ¿Cuál es la distancia horizontal del punto de disparo al punto donde el proyectil alcanza por primera vez una altura de 64 metros? 3. Determine que lugar geométrico representa cada ecuación. Trazar la representación gráfica correspondiente para cada una. (a) 4y 2 − 48x − 20y = 71. (b) 4x2 + 48y + 12x = 159. (c) 2(1 − y) = (3x − 1)2 . (d) (2y − 3)2 = 6(1 − 3x). (e) 2x2 + x − 3 = 0. (f) y 2 + y + 1 = 0. 10 La elipse 1. Para cada uno de los ejercicios siguientes, hallar la ecuación de la elipse que satisface las condiciones dadas. Dibujar cada curva. (a) Centro en (0, 0), un foco en ( 43 , 0), un vértice en (1, 0). (b) Centro en (−3, 4), semiejes de longitud 4 y 3, eje mayor paralelo al eje X. Introducción a la geometrı́a analı́tica. Yoel Gutiérrez - 2005 17 (c) Vértices en (−1, 2) y (−7, 2), eje menor de longitud 2. (d) Vértices en (3, −2) y (13, −2), focos en (4, −2) y (12, −2). 2. La tierra se mueve sobra una órbita elı́ptica con el sol en uno de sus focos. Si la longitud de la mitad del eje mayor es de 93 millones de millas y la excentricidad es 0,017. Hallar las distancias mı́nimas y máximas entre la tierra y el sol. 3. El techo de un pasillo de 10 metros de anchura tiene la forma de una semielipse y 9 metros de altura en el centro, ası́ como 6 metros de altura en las paredes laterales. Calcule la altura de techo a 2 metros de una de las paredes laterales. 4. Determine que lugar geométrico representa cada ecuación. Trazar la representación gráfica correspondiente para cada una. (a) x2 + 4y 2 − 6x + 16y + 21 = 0. (b) 4x2 + 9y 2 + 32x − 18y + 37 = 0. (c) x2 + 4y 2 − 10x − 40y + 109 = 0. (d) 9x2 + 4y 2 − 8y − 32 = 0. √ √ (e) 3x2 + 2y 2 − 6 2x − 4 3y + 6 = 0. (f) (x2 + 4y)(x2 + 4y 2 − 4) = 0. (g) 11 (2x−1)2 4 + (2 − y)2 = 1. La hipérbola 1. En cada uno de ejercicios siguientes, hallar la ecuación para la hipérbola que satisface las condiciones dadas. Dibujar cada curva y las ası́ntotas. (a) centro en (0, 0), un foco en (4, 0), un vértice en (2, 0). √ √ (b) Focos en (0, 2) y (0, − 2), vértices en (0, 1) y (0, −1). (c) Centro en (−1, 4), un foco en (−1, 2), un vértice en (−1, 3). 2. Determine que lugar geométrico representa cada ecuación. Trazar la representación gráfica correspondiente para cada una. (a) x2 − 9y 2 − 4x + 36y − 41 = 0. (b) 4x2 − 9y 2 + 32x + 36y + 64 = 0. (c) x2 − 4y 2 − 2x + 1 = 0. Introducción a la geometrı́a analı́tica. Yoel Gutiérrez - 2005 18 (d) 9x2 − 4y 2 + 54x + 16y + 29 = 0. (e) 3x2 − 1y 2 + 30x + 78 = 0. (f) 2y 2 − x2 4 = −5. (g) x2 − 4 = 0. (h) 11.1 x2 4 − 2y 2 = 0. Sistemas de ecuaciones y regiones en el plano 1. Resuelva los siguientes sistemas de ecuaciones y trazar la representación gráfica. ( −3x + 8y = 16 (a) 16x − 5y = 3 ( 2x − y − 1 = 0 (b) 3x + y − 9 = 0 ( 2 y −x=0 (c) 2x − y − 6 = 0 ( 2 x + y2 = 8 (d) y 2 = 2x ( (x − 2)2 + (y + 1)2 = 8 (e) y =x−1 ( y = x2 − 6x + 9 (f) (x − 3)2 + (y − 9)2 = 9 ( 2 x + y 2 − 2x + 6y = 6 (g) x2 + y 2 + 4x + 2y = 8 ( 2 x + 4y 2 = 36 (h) 2x2 − y 2 = 8 2. Use un sistema de dos ecuaciones lineales con dos incógnitas para resolver los siguientes problemas (a) El perı́metro de un rectángulo es de 60 cm. Su longitud es el doble del ancho más tres. Calcules las dimensiones. (b) El tesorero de la asociación estudiantil informo que los recibos del último concierto totalizaron 916 dólares y que asistieron 560 personas. los estudiantes Introducción a la geometrı́a analı́tica. Yoel Gutiérrez - 2005 19 pagaron 1,25 dólares por boleto y los no estudiante 2,35 dólares. ¿Cuántos estudiantes fueron al concierto? (c) Si Susana diera a Samuel un dólar, ,este tendrı́a la mitad de los dólares que susana. Si Samuel diera a Susana uno de su dólares, ella tendrı́a 5 veces más dinero que samuel. ¿Cuántos dólares tiene cada uno? (d) La suma de dos números es 20. El número mayor es el doble del menor menos cuatro. ¿Cuáles son los números? (e) Un vendedor dice que no importa si un par de zapatos se venden en Bs.77500 o dos pares en Bs.122500, porque la ganancia es igual en cada caso. ¿Cuánto le cuesta al vendedor un par de zapatos y cual es su ganancia? 3. dibuje la región que contiene los puntos cuyas coordenadas satisfacen la desigualdad dada. (a) y > 1. (b) x > −3. (c) −1 < y < 1. (d) x − y > 2. (e) 2x − y < −2. (f) y > x2 − 16. (g) x2 + y 2 < 4. (h) (x − 1)2 + (y + 2)2 > 9. (i) x2 4 + y 2 > 1. (j) x2 − y 2 < 2. (k) y − (x − 4)2 ≥ 1. (l) x2 < y. (m) |x| + |y| < 1. (n) |x| − |y| ≤ 1. 4. Represente gráficamente el conjunto solución de cada uno de los sistemas de inecuaciones indicados a continuación. ( x+y >1 (a) x−y <1 Introducción a la geometrı́a analı́tica. ( (b) ( (c) Yoel Gutiérrez - 2005 20 2y − 1 > 0 (x + 3)2 > x2 + 2y x2 + y 2 > 1 x+y <1 2 2 x +y <1 9 4 (d) x2 + y 2 > 4 2 x y2 + >1 9 4 (e) 2 2 x −y <1 9 4 5. Para cada una de las siguientes ecuaciones identifique el lugar geométrico correspondiente. (a) x2 + y 2 − 2x + 4y + 4 = 0. (b) x2 + y 2 − 6x + 2y + 6 = 0. (c) 4x2 + 9y 2 − 16x + 72y + 124 = 0. (d) 9x2 − 16y 2 + 90x + 192y − 495 = 0. (e) 4x2 + 9y 2 − 16x + 72y + 160 = 0. (f) 9x2 + 16y 2 + 90x192y + 1000 = 0. (g) y 2 − 10x − 8y − 14 = 0. (h) 4x2 + 4y 2 − 16x − 20y − 10 = 0. (i) x2 + y 2 − 2x + 4y + 20 = 0. (j) 4x2 − 4y 2 + 16x − 20y − 10 = 0. (k) 4x2 − 4y 2 + 16x − 20y − 9 = 0. (l) 4x2 − 16x + 16 = 0. (m) 4x2 − 16x + 15 = 0. (n) 25x2 + 4y 2 + 150x − 8y + 129 = 0. (o) 25x2 − 4y 2 + 150x − 8y + 129 = 0. (p) 3x + 4y − 16 = 0.