1´25 puntos
Anuncio

PROPUESTA A
1A a) Calcula el valor de a R, a > 0, para que la función
sea continua en x = 0.
(1´25 puntos)
b) Calcula el límite
(1´25 puntos)
2A. Calcula las siguientes integrales
(1´25 puntos por cada integral)
Observación: El cambio de variable t = ex puede ayudarte a calcular la segunda integral.
3A. a) Despeja X en la ecuación matricial X·A – B = 2X donde A, B y X son matrices cuadradas
de orden 3.
(1´25 puntos)
b) Calcula X, siendo
(1´25 puntos)
4A. a) Estudia la posición relativa de las rectas
en función del parámetro a R.
b) Encuentra el punto de corte de las rectas en el caso en que sean secantes.
(2 puntos)
(0´5 puntos)
(sigue a la vuelta)
PROPUESTA B
1B. a) Interpretación geométrica de la derivada de una función en un punto.
b) Halla el punto de la gráfica de la función
tiene pendiente mínima.
(1 punto)
donde la recta tangente
(1´5 puntos)
2B. a) Esboza la región encerrada entre las gráficas de las funciones f(x) = 1/x y g(x) = – 2x + 3.
(0´5 puntos)
b) Calcula el área de la región anterior.
(2 puntos)
3B. a) Discute el siguiente sistema de ecuaciones lineales en función del parámetro m R,
(1´5 puntos)
b) Calcula la solución cuando el sistema sea Compatible Indeterminado.
(1 punto)
4B. a) Dados los puntos P( 4, 2, 3 ) y Q( 2 , 0 , – 5 ), da la ecuación implícita del plano de modo
que el punto simétrico de P respecto a es Q.
(1,25 puntos)
b) Calcula el valor del parámetro R para que el plano determinado por los puntos P, Q y
R( , 1, 0) pase por el origen de coordenadas.
(1´25 puntos)
2
SOLUCIONES A LOS EJERCICIOS Y PROBLEMAS DE LA PROPUESTA A
1A a) Calcula el valor de a R, a > 0, para que la función
sea continua en x = 0.
(1´25 puntos)
b) Calcula el límite
(1´25 puntos)
Solución.
a) Calcula el valor de a R, a > 0, para que la función
sea continua en x = 0.
(1´25 puntos)
Para que una función f(x) sea continua en x = x0 debe ocurrir que,
Aplicado a la función del enunciado en el valor x = 0 tendremos que forzar a la función f(x)
a cumplir con la condición siguiente,
Por lo tanto, calcularemos los dos límites en torno al valor x = 0 y la imagen de la función
f(x) en x = 0.
Calculamos primero el límite por la izquierda a f(x) en torno al valor x = 0,
Resolvemos la indeterminación aplicando la regla de L´Hôpital,
3
Calculamos ahora el límite por la derecha a f(x) en torno al valor x = 0,
Por último, calculamos la imagen de f(x) en el valor x = 0,
Por lo tanto, como f(x) tiene que ser continua en x = 0, tendremos que,
Concluimos que para que f(x) sea continua en x = 0 entonces a = 2.
b) Calcula el límite
(1´25 puntos)
Realizamos dicho límite,
Estamos ante una indeterminación del tipo 1, procedemos a tomar logaritmos neperianos,
4
Aplicamos la regla de L´Hôpital,
Por lo tanto, el límite pedido tendrá valor,
2A. Calcula las siguientes integrales
(1´25 puntos por cada integral)
Observación: El cambio de variable t = ex puede ayudarte a calcular la segunda integral.
Solución.
Descomponemos la integral en la suma de tres integrales y las resolvemos mediante
integración de funciones potenciales o mediante integración de funciones de tipo logarítmico.
5
Hacemos el cambio de variable propuesto en el enunciado,
La integral queda transformada en,
Aplicamos el método de resolución de integrales por fracciones simples.
Comenzamos calculando las raíces del denominador,
Por lo tanto, reescribimos el integrando mediante fracciones simples del siguiente modo:
Operamos para conocer los valores de las constantes A y B,
6
Damos valores a la incógnita para calcular las constantes A y B,
Por lo tanto,
Resolvemos las integrales de las fracciones simples mediante integración de tipo logarítmico,
Deshacemos el cambio de variable t = ex y obtenemos la primitiva buscada,
3A. a) Despeja X en la ecuación matricial X·A – B = 2X donde A, B y X son matrices
cuadradas de orden 3.
(1´25 puntos)
b) Calcula X, siendo
(1´25 puntos)
Solución.
a) Despeja X en la ecuación matricial X·A – B = 2X donde A, B y X son matrices
cuadradas de orden 3.
(1´25 puntos)
Por lo tanto,
7
b) Calcula X, siendo
(1´25 puntos)
Puesto que
Calculamos ahora
, calculamos
con I la matriz identidad de orden 3.
. Procedemos a hacerlo de dos maneras distintas,
Método Gauss-Jordan.
Por lo tanto, la matriz inversa de (A – 2I) es,
Método de los determinantes.
Calculamos el determinante de la matriz (A – 2I). De ser nulo, no existiría su matriz
inversa,
Calculamos la matriz traspuesta de (A – 2I), intercambiando filas y columnas,
8
Calculamos la matriz adjunta de la matriz traspuesta de (A – 2I),
La matriz inversa de (A – 2I) es el resultado de dividir a la matriz adjunta de la traspuesta
de (A – 2I) por el determinante de (A – 2I),
Por lo tanto, la matriz (A – 2I) – 1 es,
Y la matriz X es,
Por lo tanto, la solución es,
.
4A. a) Estudia la posición relativa de las rectas
en función del parámetro a R.
(2 puntos)
b) Encuentra el punto de corte de las rectas en el caso en que sean secantes.
(0´5 puntos)
Solución.
a) Estudia la posición relativa de las rectas
en función del parámetro a R.
(2 puntos)
Calculamos los vectores directores de cada recta, para estudiar la posición relativa de las
rectas r y s.
9
Tomando los vectores normales de los planos que intersecados determinan la recta r, un
vector director de la recta r será,
Tomando los vectores normales de los planos que intersecados determinan la recta s, un
vector director de la recta s será,
En ese caso, calculamos el rango de la matriz,
. Si su rango es 2 tendremos que
las rectas r y s se cortan o se cruzan; mientras que si el rango es 1 entonces las rectas son
paralelas o son coincidentes.
Como, en dicha matriz existe al menos un menor de orden dos con determinante no nulo,
Entonces Rg(M) = 2 y obtenemos que las rectas r y s se cortan o se cruzan.
Para poder discernir entre si se cortan o se cruzan, tomaremos un punto de cada una de las
rectas (A r y B s), crearemos el vector libre
que generan y calcularemos el rango de
la matriz
. Si el rango de dicha matriz es 3, las rectas r y s se cruzan;
mientas que si el rango es 2, las rectas se cortan.
En la recta
si tomamos x = 0 entonces z = 0 por la primera ecuación e y
= 2 por la segunda. De ese modo, acabamos de determinar que el punto A(0, 2, 0) r
En la recta
si tomamos x = 1 entonces
De ese modo, acabamos de determinar que el punto B(0, – a/4, a/4) s
10
Un vector libre
será,
Un vector proporcional a
será,
Por lo tanto, si estudiamos el rango de la matriz
vemos que,
Al igualar este determinante a cero,
Por lo tanto,
Si a 5 entonces Rg(M´) = 3 y las rectas r y s se cruzarán.
Si a = 5 entonces Rg(M´) = 2 y las rectas r y s se cortarán.
b) Encuentra el punto de corte de las rectas en el caso en que sean secantes.
(0´5 puntos)
El punto de corte cuando r y s son secantes, se obtiene sólo si a = 5. En ese caso, dicho
punto se puede calcular, resolviendo el sistema formado por tres de los cuatro planos con
vectores normales independientes de entre los cuatro planos que determinan a las rectas
según el enunciado. Por lo tanto, tomamos los dos planos de r y el segundo plano de s (el
que tiene al valor a = 5).
Por lo tanto, el punto de corte de r y s, cuando estas rectas son secantes, es
11
SOLUCIONES A LOS PROBLEMAS Y EJERCICIOS DE LA PROPUESTA B
1B. a) Interpretación geométrica de la derivada de una función en un punto.
b) Halla el punto de la gráfica de la función
tiene pendiente mínima.
(1 punto)
donde la recta tangente
(1´5 puntos)
Solución.
a) Interpretación geométrica de la derivada de una función en un punto.
(1 punto)
La derivada de una función f(x) en un punto de abcisa x = a es el límite cuando el
incremento h tiende a cero del cociente de la diferencia de la imagen del valor incrementado
f(a+h) y la imagen de la función f(a), entre dicho incremento h.
Por lo tanto, la derivada de una función f(x) es el límite cuando el incremento h tiende a cero
de la tasa de variación media cuando uno de los valores está fijo y es el otro valor (el valor
obtenido mediante el incremento del valor fijo) el que se desplaza a medida que
disminuimos el incremento.
Eso nos hace concluir que la derivada de una función f(x) en una abcisa x = a sólo existirá si
ocurren las siguientes condiciones:
- Que exista la función en el punto, es decir f(a).
- Que exista el límite de la tasa de variación media, es decir, que existan, sean finitos y
coincidan los límites laterales del cociente incremental cuando disminuimos el incremento.
12
Si se dan estas dos condiciones podemos decir que el valor obtenido, la derivada de la
función en un punto, es la pendiente de la recta tangente a la función f(x) en ese valor x = a.
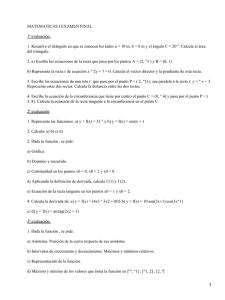
En términos trigonométricos, la derivada de una función f(x) en un punto de abcisa x = a nos
determina, de existir, la tangente del ángulo de inclinación de la recta tangente. Esto se debe
a que los cocientes incrementales sobre los que actuamos en forma de límite cuando el
incremento se hace cero, son valores de tangente (cateto opuesto entre cateto contiguo) del
triángulo rectángulo que forman los puntos (a, f(a)), (a+h, f(a+h)) y (a+h, f(a)). Esto nos
permite aproximar la tangente del ángulo de inclinación de la recta tangente a la función f(x)
en el valor de abcisa x = a.
b) Halla el punto de la gráfica de la función
tiene pendiente mínima.
donde la recta tangente
(1´5 puntos)
La ecuación de la recta tangente a la función f(x) en el punto de abcisa x = a viene dada por,
En nuestro caso, la derivada en el valor x = a será,
Puesto que se precisa que la recta tangente tenga pendiente mínima calculamos la derivada de
la pendiente e igualamos a cero,
Este valor a = – 1 hace a la pendiente mínima ya que, sustituido en la derivada sucesiva se
obtiene un valor positivo.
Por lo tanto, el punto de la gráfica de la función
tiene pendiente mínima es
donde la recta tangente
Calculamos f(– 1) sustituyendo x = – 1 en la expresión algebraica de la función,
Concluimos que, el punto de la gráfica de f(x) donde la pendiente de la recta tangente es
mínima es (– 1, 3).
13
2B. a) Esboza la región encerrada entre las gráficas de las funciones f(x) = 1/x y
g(x) = – 2x + 3.
(0´5 puntos)
b) Calcula el área de la región anterior.
(2 puntos)
Solución
a) Esboza la región encerrada entre las gráficas de las funciones f(x) = 1/x y
g(x) = – 2x + 3.
(0´5 puntos)
La función f(x) es una hipérbola que tiene por dominio R – {0}; tiene una asíntota vertical
en x = 0 y por asíntota horizontal y = 0. Además, puesto que
la función decrece en todo su dominio.
Por su parte, la función g(x) es una recta afín decreciente ya que tiene una expresión
analítica en forma de polinomio de grado 1, con pendiente negativa (m = – 2) y ordenada
en el origen n = 3.
Damos algunos valores en cada función mediante una tabla de valores para poder dar algo
más de rigor a nuestra representación.
x
f(x) = 1/x
x
1
1
2
2
3
3
–1
–1
f(x) = – 2x + 3
Además, ambas funciones presentan intersección en los valores x tales que,
Resolvemos la ecuación de segundo grado,
14
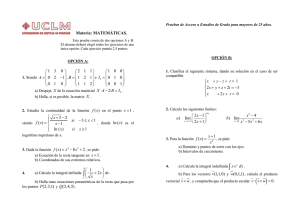
En estas condiciones, la región encerrada entre estas dos gráficas queda determinada por la
siguiente representación,
b) Calcula el área de la región anterior.
(2 puntos)
El área vendrá definida por el resultado de la siguiente integral definida entre los valores
x = 0´5 y x = 1, como vimos en el apartado anterior.
15
3B. a) Discute el siguiente sistema de ecuaciones lineales en función del parámetro m R,
(1´5 puntos)
b) Calcula la solución cuando el sistema sea Compatible Indeterminado.
(1 punto)
Solución
a) Discute el siguiente sistema de ecuaciones lineales en función del parámetro m R,
(1´5 puntos)
Estudiamos los rangos de la matriz de coeficientes A y la matriz ampliada A* asociadas al
sistema.
Mediante el teorema de Rouché-Frobenius sabemos que,
Si Rg(A) = Rg(A*) = nº de incógnitas entonces el sistema es Compatible Determinado y
tiene una única solución.
Si Rg(A) = Rg(A*) < nº de incógnitas entonces el sistema es Compatible Indeterminado
y tiene infinitas soluciones.
Si Rg(A) Rg(A*) entonces el sistema es Incompatible y NO tiene solución.
Por ello, comenzamos estudiando el rango de la matriz de coeficientes A. Puesto que el
único menor de orden 3 tiene por determinante,
Observamos que si |A| 0 entonces Rg(A*) = 3. Calculamos el valor que anula al
determinante anterior,
16
En ese caso,
Si m 1 entonces Rg(A) = 2, Rg(A*) = 3 y el sistema es Incompatible.
Si m = 1 entonces comprobamos qué ocurre con los demás menores de orden 3 de la
matriz ampliada A*
Observamos que la tercera fila de la matriz es la resta de la segunda fila menos la primera.
F3 = F2 – F1
En ese caso, los determinantes de todos los menores de orden 3 de la matriz ampliada A*
serán nulos y, por tanto, Rg(A*) < 3. Como el rango de A es siempre menor o igual que el
rango de la matriz ampliada asociada, entonces, 2 = Rg(A) ≤ Rg(A*) < 3 nos lleva a que
Rg(A*) = 2.
Por lo tanto, si m = 1 entonces Rg(A) = Rg(A*) = 2 y el Sistema es Compatible
Indeterminado.
En resumen,
Si m 1 entonces Rg(A) = 2, Rg(A*) = 3 y el sistema es Incompatible. Por tanto, no
tiene solución.
Si m = 1 entonces Rg(A) = 2, Rg(A*) = 2 y el sistema es Compatible Indeterminado.
Por tanto, tiene infinitas soluciones.
b) Calcula la solución cuando el sistema sea Compatible Indeterminado.
Debemos resolver el caso del sistema para m = 1.
Puesto que, el menor
asociado al sistema, tiene por determinante,
17
(1 punto)
Entonces, podemos eliminar del sistema la tercera ecuación (que ya vimos en el apartado
anterior que era combinación lineal de las anteriores) y convertir a la incógnita z en
parámetro. El sistema a resolver queda del siguiente modo,
Resolvemos mediante el método de Cramer,
Por tanto, las soluciones del sistema para m = 1, vendrán definidas por el sistema
paramétrico,
4B. a) Dados los puntos P( 4, 2, 3 ) y Q( 2 , 0 , – 5 ), da la ecuación implícita del plano de
modo que el punto simétrico de P respecto a es Q.
(1,25 puntos)
b) Calcula el valor del parámetro R para que el plano determinado por los puntos P, Q
y R( , 1, 0) pase por el origen de coordenadas.
(1´25 puntos)
Solución.
a) Dados los puntos P( 4, 2, 3 ) y Q( 2 , 0 , – 5 ), da la ecuación implícita del plano de
modo que el punto simétrico de P respecto a es Q.
(1,25 puntos)
Un vector normal del plano vendrá dado por el vector
.
Por tanto, la dirección de los vectores normales al plano vendrá descrita por todos los
vectores proporcionales al vector (1, 1, 4).
18
Por otra parte, aplicando lo anterior, el plano vendrá dado por la ecuación implícita
x + y + 4z = a
en donde debemos determinar el valor de la constante a.
Calculamos un punto del plano mediante el cálculo del punto medio del segmento
Puesto que el punto
pertenece al plano , calculamos el valor de la constante a
mediante la sustitución del punto
en la ecuación del plano .
3 + 1 + 4·(– 1) = a
0=a
Concluimos que el plano de modo que el punto simétrico de P respecto a sea Q es,
x + y + 4z = 0
b) Calcula el valor del parámetro R para que el plano determinado por los puntos P, Q
y R( , 1, 0) pase por el origen de coordenadas.
(1´25 puntos)
Calculamos la ecuación del plano determinado por los puntos P, Q y R.
Puesto que el plano tiene que pasar por el origen de coordenadas (0, 0, 0) entonces, debemos
sustituir en la ecuación del plano las coordenadas del origen, calculando así el valor del
parámetro ,
Concluimos que
.
19