Sintonización de controladores PI de 2GdL en sistemas de control
Anuncio

Universidad de Costa Rica
Facultad de Ingeniería
Escuela de Ingeniería Eléctrica
Sintonización de controladores PI de 2GdL
en sistemas de control vectorial indirecto
Por:
Allan Pérez Arias
Ciudad Universitaria Rodrigo Facio, Costa Rica
Enero de 2013
Sintonización de controladores PI de 2GdL
en sistemas de control vectorial indirecto
Por:
Allan Pérez Arias
Sometida a la Escuela de Ingeniería Eléctrica
de la Facultad de Ingeniería
de la Universidad de Costa Rica
como requisito parcial para optar por el grado de:
BACHILLER EN INGENIERÍA ELÉCTRICA
Aprobada por el Tribunal:
Ing. Mauricio Espinoza B
Profesor guía
Dr. Víctor M. Alfaro
Ing. Mercedes Chacón
Profesor lector
Profesor lector
Dedicatoria
Son la tierra bajo mi suelo
simples, llanos, como el alma de los números
caminan descalzos sobre rojos tizones
cargan pesadas construcciones con fuerza de gigantes
lo hacen por mis aires de grandeza
por los sueños de nosotros, sus hijos terrenales
porque sea yo un grande y me comporte como tal
porque sepan quién soy, aunque de ellos no se escuche
estamos nosotros primero siempre para ellos dos, y luego si algo queda...
será suyo, como debío ser desde el principio, el crédito de la verdad.
...
Sin sus manos callosas que sujetaron mis asomos de curiosidad
no habría aquí hoy letra detrás de letra,
grácas,
ecuaciones,
pruebas ni sistemas
habría un simple espacio vacío
o un hombre vacío ocupando estos pellejos y estos huesos.
...
Por lo general escribo informes: objetivos, desarrollo, bibliografía...
describo resultados, interpreto errores y escribo de nuevo informes, objetivos,
desarrollo, bibliografía
así que estas líneas sueltas serán para ellos
para mis queridos papi y mami por los siglos que duren los bits.
iii
Reconocimientos
Al profesor Mauricio Espinoza, por sus constantes consejos, aportes y sugerencias
durante el desarrollo del Proyecto, incluida la época de navidad, además de
recordarme que se siente mejor si uno mismo lo hace. Y obviamente, por el modelo z.
A mi papá y mamá, por tenerme en la casa durante las vacaciones, sentado en una
silla, insistiendo en que siguiera.
A mis amigos, que me han acompañado estos años en la U, han hecho que la familia
crezca.
iv
Índice general
Resumen
ix
Nomenclatura
x
1. Introducción
1
1.1. Alcances . . . . . . . . . . .
1.2. Justicación . . . . . . . . .
1.3. Objetivos . . . . . . . . . .
1.3.1. Objetivo general . .
1.3.2. Objetivos especícos
1.4. Metodología . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
2. Antecedentes
2.1. Máquinas de inducción . . . . . . . . . . . . . . . . . . . . . . . .
2.2. Vectores espaciales . . . . . . . . . . . . . . . . . . . . . . . . . .
2.3. Vectores espaciales para un modelado dq . . . . . . . . . . . . . .
2.3.1. Modelado en ejes dq para una máquina de inducción . . .
2.3.2. Par y potencia en el marco dq . . . . . . . . . . . . . . . .
2.3.3. Estimación del torque electromagnético . . . . . . . . . . .
2.4. Control vectorial indirecto del motor de inducción . . . . . . . . .
2.4.1. Modelo de la máquina . . . . . . . . . . . . . . . . . . . .
2.4.2. Esquema de control vectorial indirecto . . . . . . . . . . .
2.4.3. Red de desacople propuesta por Kazierkowski et al. (2002)
2.4.4. Estimación de la velocidad angular ωe . . . . . . . . . . .
3. Pruebas de validación
3.1. Diseño de la red de desacople . . . . . . .
3.2. Sintonización de controladores . . . . . . .
3.2.1. Descripción del orden de la sintonía
3.2.2. Controladores Cd y Cq . . . . . . .
3.2.3. Controladores Cf y Cp . . . . . . .
3.2.4. Controlador Cv . . . . . . . . . . .
v
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
1
1
1
2
2
2
4
4
4
7
9
10
12
13
13
15
16
18
19
19
22
23
24
26
30
ÍNDICE GENERAL
3.3. Pruebas con un perl de velocidad . . . . . . . . . . . . . . . . . . . .
3.3.1. Cambio escalón de par (perturbación) . . . . . . . . . . . . . . .
3.3.2. Cambio rampa en par de carga . . . . . . . . . . . . . . . . . .
vi
32
32
32
4. Conclusiones y recomendaciones
35
Bibliografía
37
Apéndices
37
A. Ecuaciones de sintonía, usando el método ART2
38
B. Ecuaciones de sintonía, usando la síntesis del servo control
39
4.1. Conclusiones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.2. Recomendaciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
35
36
Índice de guras
2.1.
2.2.
2.3.
2.4.
2.5.
2.6.
2.7.
2.8.
2.9.
Curva par-velocidad de una máquina de inducción (Chapman, 2000)
Ejemplo del concepto de vector espacial, en un sistema trifásico . .
Transformada de Park en modo fasorial . . . . . . . . . . . . . . . .
Circuito equivalente de la máquina de inducción, eje directo . . . .
Circuito equivalente de la máquina de inducción, eje de cuadratura
Modelo del motor sincrónico (Phung and Dittrich, 2008) . . . . . .
Esquema de control vectorial indirecto . . . . . . . . . . . . . . . .
Red de desacople de (Kazierkowski et al., 2002) . . . . . . . . . . .
Respuesta de la red de desacople de Kazierkowski et al. (2002) . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
5
6
8
10
11
14
16
17
17
3.1. Red de desacople propuesta . . . . . . . . . . . . . . . . . . . . . .
3.2. Modelos aparentes al colocar la red . . . . . . . . . . . . . . . . . .
3.3. Respuesta dinámica del sistema sin red de desacople . . . . . . . . .
3.4. Diagrama de bloques empleado para la sintonía . . . . . . . . . . .
3.5. Respuesta de lazo cerrado para corrientes ids , iqs , ART2 . . . . . . .
3.6. Respuesta de lazo cerrado ids , iqs , red de Kazierkowski et al. (2002)
3.7. Curva de λdr ante una entrada escalón . . . . . . . . . . . . . . . .
3.8. Respuesta de lazo cerrado para λdr , ART2 . . . . . . . . . . . . . .
3.9. Respuesta de Te ante una entrada escalón . . . . . . . . . . . . . . .
3.10. Respuesta de Te ante cambio en el valor deseado, ART2 . . . . . . .
3.11. Lazo de control para velocidad angular . . . . . . . . . . . . . . . .
3.12. Respuesta de ωm ante un cambio escalón . . . . . . . . . . . . . . .
3.13. Control de velocidad, ART2 . . . . . . . . . . . . . . . . . . . . . .
3.14. Perl de velocidad, escalón de par . . . . . . . . . . . . . . . . . . .
3.15. Perl de velocidad, rampa de par . . . . . . . . . . . . . . . . . . .
3.16. Debilitamiento de ujo . . . . . . . . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
21
21
22
23
26
26
27
28
29
30
30
31
32
33
33
34
vii
Índice de cuadros
2.1. Correspondencia de parámetros . . . . . . . . . . . . . . . . . . . . . .
2.2. Correspondencia de parámetros con Phung and Dittrich (2008) . . . . .
viii
14
15
Resumen
Los constantes incrementos en el precio del petróleo, han hecho desde hace años, que
la atención se ponga sobre los motores eléctricos, pensando en distintas aplicaciones
industriales e inclusive vehículos. Para ello, se requieren métodos robustos de control de
velocidad y par. Dentro de estos métodos, el control vectorial indirecto hace su aporte,
reduce los sensores requeridos a uno de corriente trifásica y otro de velocidad angular,
además de reducir el contenido de armónicos mediante la aplicación de métodos como
el de modulación por ancho de pulso.
Se trató entonces de conseguir un aporte para el desarrollo de la técnica, describiendo
las ecuaciones analíticas que permitan sintonizar los controladores PI de dos grados de
libertad, presentes en el control vectorial. Para ello fue requerido como primer paso,
independizar las corrientes de eje directo de cuadratura del estator, por lo que se diseñó
una red de desacople, también analítica, que permitió conseguir este objetivo. Una vez
desacoplado correctamente, el sistema consta de lazos que pueden ser sintonizados
independientemente.
Se puso a prueba la propuesta de red de desacople de la literatura (Kazierkowski et al.,
2002), frente a la red propuesta. Ambas redes se sometieron a pruebas escalón de lazo
abierto, además de usar la misma sintonía de los controladores en lazo cerrado, para
aplicar una prueba de cambio escalón en el valor deseado. En los dos casos se obtuvieron
mejores resultados con la red propuesta.
ix
Nomenclatura
a, b, c
fases de un sistema trifásico
av
operador complejo de magnitud unitaria y ángulo de ciento veinte grados
B
coeciente de amortiguamiento
Fa,b,c
fuerza magnetomotriz por fase, de una máquina eléctrica trifásica
fa,b,c
variable cualquiera expresada en un marco de referencia a,b,c
fd,q,0
variable cualquiera expresada en un marco de referencia dq
fe
frecuencia de la señal eléctrica que alimenta la máquina CA
i(a,b,c)
corrientes de fase de una máquina trifásica
~iabcs
vector de corrientes del estator
~iabcr
vector de corrientes del rotor
ids
corriente del estator reejado al eje directo
iqs
corriente del estator reejado al eje de cuadratura
idr
corriente del rotor reejado al eje directo
iqr
corriente del rotor reejado al eje de cuadratura
Im {f (jw)} operación cálculo de la parte imaginaria de una función compleja
J
momento de inercia del motor
kc
ganancia del controlador
Lls
inductancia de encadenamiento del estator
Llr
inductancia de encadenamiento del rotor
Lm
inductancia mutua
nm
velocidad de giro del eje del motor en revoluciones por minuto
x
NOMENCLATURA
Ns
número de vueltas del bobinado del estator de una máquina eléctrica
p
operador de derivación
Pin
potencia eléctrica de entrada de una máquina de inducción
Ppo
número de polos de una máquina de inducción
Rs
resistencia de los devanados del estator
Rr
resistencia de los devanados del rotor
xi
Re {f (jw)} operación cálculo de la parte real de una función compleja
Tabc−dq
transformación lineal de un sistema trifásico (a,b,c ) a uno bifásico (dq )
Tdq−abc
transformación lineal de un sistema bifásico (dq ) a uno trifásico (a,b,c )
Ti
tiempo integral del controlador
~vabcs
vector de tensiones del estator
~vabcr
vector de tensiones del rotor (cero en una máquina de jaula de ardilla)
vds
tensión del estator reejado al eje directo
vqs
tensión del estator reejado al eje de cuadratura
vdr
tensión del rotor reejado al eje directo
vqr
tensión del rotor reejado al eje de cuadratura
Va,b,c
amplitud de tensión de fase (a,b,c respectivamente)
ωm
velocidad angular del rotor
ωx
velocidad angular cualquiera en radianes por segundo
ωe
velocidad angular eléctrica, en radianes por segundo
λdr
ujo magnético del rotor en el eje directo
Capítulo 1
Introducción
1.1. Alcances
Este trabajo aporta dos consideraciones en la teoría de control vectorial indirecto: El
desarrollo de una red de desacople analítica, que logra independizar las señales de
corriente dq dentro de este método, y utilizar la regla de sintonización ART2 , aplicada
a modelos de primer orden sin tiempo muerto, para desarrollar un orden en la sintonía
de los controladores del sistema, de forma que las ecuaciones queden en función de
constantes del motor y de parámetros de diseño. Además de las pruebas del caso para
vericar el correcto funcionamiento de estas dos consideraciones.
1.2. Justicación
Se inició el presente trabajo con el n de conseguir un conjunto de ecuaciones analíticas, que permitan sintonizar de forma adecuada los controladores PI de dos grados
de libertad, empleados dentro de un esquema de control vectorial. Se hace necesario
conseguir este conjunto de ecuaciones debido a que no existe una forma analítica de
sintonizar los controladores del proceso.
1.3. Objetivos
Se establecieron los siguientes objetivos para el desarrollo del trabajo:
1
CAPÍTULO 1.
1.3.1.
2
INTRODUCCIÓN
Objetivo general
Aplicar un método de sintonización analítico para controladores PI de dos grados de
libertad, en sistemas de control vectorial indirecto, de forma que los parámetros de sintonización de los controladores sean función del motor y de parámetros de diseño.
1.3.2.
Objetivos especícos
Investigar los aspectos esenciales del control vectorial indirecto de motores de
inducción.
Matlab R / Simulink R que represente un sistema
Implementar un programa en
de control vectorial indirecto.
Desarrollar una red de desacople analítica para las corrientes dq del motor.
Obtener los modelos del proceso respectivo, en función de los parámetros del
sistema y de los controladores internos.
Obtener ecuaciones de sintonización en función de los parámetros del proceso y
los parámetros de los controladores presentes en los lazos de control, utilizando
un método de sintonía analítico.
Validar el diseño del sistema de control mediante simulación, aplicando distintas
cargas al motor y valores de velocidades deseadas.
1.4. Metodología
Para el desarrollo de este proyecto se siguieron los siguientes pasos y procedimientos:
1. Se realizó una investigación sobre el método de control vectorial indirecto, la
transformada de Park y el uso de los ejes directo y de cuadratura dentro de este
método de control.
2. Se siguió un procedimiento matemático que permite explicar la operación de una
máquina de inducción trifásica, aplicando los conceptos de transformada de Park
y ejes directo y de cuadratura.
3. Se llevó a cabo una investigación sobre redes de desacople en sistemas de dos
variables, que son empleadas dentro del esquema de control vectorial indirecto.
4. Se utilizó la información descrita para el diseño de una red de desacople analítica,
que permite controlar por aparte las corrientes dq del motor.
CAPÍTULO 1.
INTRODUCCIÓN
3
5. Se realizó una descripción del proceso de control vectorial indirecto, por medio
R /
R para conseguir simularlo de forma adecuada.
del uso de
Matlab Simulink
6. A partir del proceso aparente, conseguido por medio de la red de desacople, se
utilizó el método ART2 para sintonizar uno a uno los controladores del sistema.
7. Se procedió con la validación de las ecuaciones de sintonización de los PI, por
medio de simulaciones en diferentes niveles durante el procedimiento de sintonía.
Y se compararon los resultados de la sintonización por medio del ART2 , con las
respuestas empleando la síntesis del servo control.
8. Se probó la respuesta del sistema ante un perl de velocidad deseado, variando
la carga de diferentes formas.
Capítulo 2
Antecedentes
2.1. Máquinas de inducción
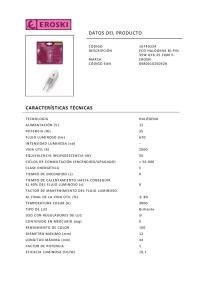
Las máquinas de inducción transforman energía eléctrica en mecánica y viceversa.
Tienen una curva característica que relaciona las variables par y velocidad, que tal
y como se ve en la gura 2.1, demuestra la limitación en cuanto a par, que se tiene
al variar la velocidad de operación de la máquina. Aquí es donde entrarán en juego
los dispositivos electrónicos de potencia, que permitirán la creación de una fuente de
corriente alterna con amplitud y frecuencia controladas. Al controlar la amplitud de la
alimentación, la curva se puede mover hacia abajo y hacia arriba; al variar la frecuencia
de alimentación se mueve hacia la derecha o hacia la izquierda.
2.2. Vectores espaciales
Dentro del análisis matemático de las máquinas eléctricas de corriente alterna, es necesario establecer un método que consiga representar los acoples magnéticos (concatenamientos de ujo (Chapman, 2000)), de forma tal que se puedan ver como sistemas
independientes. Para esto se utiliza la transformada de Park (Iqbal, 2003), que consiste en manipular variables de tipo trifásicas, para obtener un conjunto de ecuaciones
bifásicas, que logren representar de forma correcta al sistema, esta vez con los concatenamientos de ujo menos inuyentes entre sí.
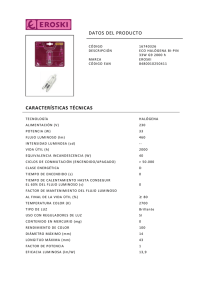
El método de vectores espaciales representa el conjunto de variables por medio de dos
bobinados cticios comúnmente llamados ejes dq, que giran a una velocidad angular
denida según el método que se emplee. Además, busca separar la corriente que controla
el ujo magnético de la que controla el par.
4
CAPÍTULO 2.
5
ANTECEDENTES
Figura 2.1: Curva par-velocidad de una máquina de inducción (Chapman, 2000)
El vector espacial es más que una función compleja, en tanto que su comportamiento
general es similar al de un fasor. Sin embargo, no solamente gira sobre un eje a una
velocidad w conocida, sino que también puede variar su amplitud en el tiempo. Para ilustrar este concepto se detallan las ecuaciones de vector espacial de las fuerzas
magnetomotrices de un motor trifásico (Iqbal, 2003):
−
→
Ns
ia (t)6 0o
Fa (t) =
2
→
−
Ns
Fb (t) =
ib (t)6 120o
2
(2.1)
→
−
Ns
Fc (t) =
ic (t)6 240o
2
en donde Ns representa el número de vueltas del bobinado del estator, además ia , ib e
ic son las corrientes trifásicas del estator.
En esta representación de cantidades físicas, la magnitud del vector representa el pico
positivo de la distribución sinusoidal espacial, mientras que el ángulo representa la
posición del pico respecto a un sistema de referencia, ya sea eléctrico o magnético,
con referencia angular en la fase a escogida arbitrariamente por conveniencia. Una vez
calculados, los vectores espaciales pueden sumarse de forma vectorial para obtener la
CAPÍTULO 2.
6
ANTECEDENTES
fuerza magnetomotriz resultante:
−
→
−
→
→
−
→
−
−
→
Fs (t) = Fa (t) + Fb (t) + Fc (t) = Fs 6 θs
(2.2)
en donde Fs es la magnitud del vector espacial y θs es el ángulo del vector espacial en
referencia a la fase a.
Se puede generalizar el concepto de vector espacial asociado a variables trifásicas,
representando por fabc cualquiera de las variables trifásicas, por ejemplo:
−→
fabc (t) = fa (t) + av fb (t) + a2v fc (t)
con
(2.3)
2
av = e j 3
Con este sistema se pueden representar entonces cualquier grupo de variables trifásicas
como ya se mencionó, por ejemplo las corrientes:
→
−
→
−
is (t) = ia (t) + av ib (t) + a2v ic (t) = is 6 θI
(2.4)
Una noción gráca del concepto de vector espacial, asociado en este caso a la corriente,
se detalla en la gura 2.2, en la cual se puede apreciar el vector espacial de corriente
como resultado de la suma fasorial de cada uno de los vectores de fase.
Figura 2.2: Ejemplo del concepto de vector espacial, en un sistema trifásico
CAPÍTULO 2.
7
ANTECEDENTES
2.3. Vectores espaciales para un modelado dq
En la sección anterior se describió la idea general de vector espacial. Con base en
esa idea se describe como utilizar este método para modelar sistemas de tipo trifásico,
transformándolo en un conjunto bifásico de ecuaciones, por medio del cual se conseguirá
representar la dinámica de un motor de inducción. Independizando así las variables de
control (ujo y par ), para su aplicación en un sistema de control vectorial.
Al convertir las variables trifásicas en un sistema bifásico, se tendrán dos ejes de referencia, uno de ellos directo con el ujo magnético (eje d ) y otro de ellos noventa grados
adelante de este (eje q ), o en cuadratura. En el eje de cuadratura el ujo magnético
neto es cero. Un método conocido para pasar de un marco de referencia al otro es la
transformada de Park, que consiste en el grupo de ecuaciones:
2
[fa cos θ + fb cos (θ − 120) + fc cos (θ + 120)]
3
2
fd = [fa sin θ + fb sin (θ − 120) + fc sin (θ + 120)]
3
1
f0 = [fa + fb + fc ]
3
fq =
(2.5)
Al aplicar la transformada de Park a un grupo de ecuaciones, se debe agregar una
constante de proporcionalidad. La constante 2/3 utilizada en esta transformación es
escogida por la relación de magnitud entre los componentes dq resultantes de la transformación, como se puede ver en el diagrama de ejes que ejemplica el uso de la
transformada, en la gura 2.3.
Además, en un sistema trifásico balanceado se cumplirá que el componente f0 de la
transformada es igual a cero. Esto se utiliza para expresar los componentes de la
transformada en su forma matricial, por medio del conjunto de ecuaciones (Iqbal,
2003):
fq (t)
fa (t)
fd (t) = Tabc−dq fb (t)
0
fc (t)
(2.6)
Tabc−dq =
cos θ cos (θ − 120) cos (θ + 120)
2
sin θ sin (θ − 120) sin (θ + 120)
3
0, 5
0, 5
0, 5
Además del conjunto de ecuaciones para el cálculo de la transformación inversa:
CAPÍTULO 2.
8
ANTECEDENTES
Figura 2.3: Transformada de Park en modo fasorial
fq (t)
fa (t)
fa (t) = Tdq−abc fd (t)
0
fc (t)
(2.7)
Tdq−abc
cos θ
sin θ
1
= cos (θ − 120) sin (θ − 120) 1
cos (θ + 120) sin (θ + 120) 1
En las ecuaciones planteadas para la transformada de Park (2.5), se observa un ángulo
θ que dene la transformada. Este ángulo cambia temporalmente según una velocidad
ω , que es lo que se puede medir, en ese sentido se puede dar uno de los siguientes tres
casos (Iqbal, 2003):
1. Caso ω = 0: el marco de referencia es estacionario y se alinea el eje q con el eje
a. En este caso el sistema dq varía sinusoidalmente a velocidad sincrónica.
2. Caso ω = ωe : marco de referencia sincrónico. Las variables del rotor y del estator
se comportan de forma constante en un sistema de estado estacionario. Este será
el caso empleado para las señales de control de los controladores.
3. Caso arbitrario, en este caso se debe elaborar un método para identicar θ, que
se comporta según:
t
θ = ∫ w(ε)dε + θ0
0
CAPÍTULO 2.
2.3.1.
9
ANTECEDENTES
Modelado en ejes
dq
para una máquina de inducción
Se puede escribir una ecuación general, en términos de los ujos magnéticos que permitirá un desarrollo matemático para el modelo de la máquina asincrónica dentro de
un marco dq, partiendo de (Iqbal, 2003):
~vabcs = Rs~iabcs + p~λabcs
(2.8)
~vabcr = Rr~iabcr + p~λabcr
~ representan los vectores de tendonde p indica la operación de derivada; vabcs
~ y iabcs
~ representan los
siones y corrientes trifásicas del estator respectivamente y vabcr
~ y iabcr
vectores de tensiones y corrientes trifásicas del rotor respectivamente. Ahora, se sabe
que en un motor de jaula de ardilla ~vabcr = 0, además se supondrá linealidad magnética,
esto es lo que se detalla en:
λ = Li
(2.9)
pλ = L
di
dt
Tomando como hecho la linealidad magnética (2.9), y desarrollando con ello (2.8) se
puede obtener una expresión de variable compleja, para continuar con el desarrollo del
modelo de la máquina, esta expresión es de la forma (Iqbal, 2003):
~vabcs = Rs~iabcs + Ls p~iabcs + Lm p~iabcr ejθr + jωr Lm~iabcr ejθr
(2.10)
~vabcr = Rr~iabcr + Lr p~iabcr
donde:
+ Lm p~iabcs e−jθr + jωr Lm~iabcs e−jθr
dθr
dt
Ls = Lls + Lm
ωr = pθr =
Lr = Llr + Lm
Además, Lls y Llr son las inductancias de dispersión de ujo del estator y del rotor
respectivamente. Ahora, utilizando la transformada de Park (2.5), en conjunto con la
teoría de vectores espaciales, se puede obtener el conjunto vectorial de los componentes
CAPÍTULO 2.
10
ANTECEDENTES
en eje directo y de cuadratura de la máquina de inducción, que giran a una velocidad
arbitraria ω , de la forma (Iqbal, 2003):
~vqds = Rs~iqds + Ls p~iqds + Lm p~iqdr + jω(Ls~iqds + Lm~iqdr )
(2.11)
~vqdr = Rr~iqds + Lr p~iqdr
+ Lm p~iqds + j(ω − ωr )(Lr~iqdr + Lm~iqds )
Las ecuaciones (2.11) se pueden exponer en su forma matricial para un estudio más detallado sobre los parámetros físicos que entran en juego en la dinámica de una máquina
de inducción, la matriz de parámetros se puede ver como (Iqbal, 2003):
ids
Rs
−ωLs
0
−ωLm
Vds
iqs
Vqs
ωLs
Rs
ωLm
0
+
=
Vdr
0
− (ω − ωr ) Lm (ω − ωr ) Lr − (ω − ωr ) Lr idr
iqr
(ω − ωr ) Lm
0
0
Rr
Vqr
Ls 0 Lm 0
pids
0 Ls 0 Lm piqs
Lm 0 Lr 0 pidr (2.12)
0 Lm 0 Lr
piqr
Las ecuaciones matriciales que describen el modelo en un eje de referencia dq, pueden
ser representadas por un circuito equivalente que ayuda en la comprensión de este
modelado. El circuito es representado por dos circuitos, uno de eje directo y otro de
eje en cuadratura, que se pueden ver en las guras 2.4 y 2.5 respectivamente.
Figura 2.4: Circuito equivalente de la máquina de inducción, eje directo
2.3.2.
Par y potencia en el marco
dq
La intención de efectuar una transformación lineal y separar los parámetros de la
máquina en dos ejes perpendiculares, es conseguir las herramientas para controlar las
CAPÍTULO 2.
11
ANTECEDENTES
Figura 2.5: Circuito equivalente de la máquina de inducción, eje de cuadratura
variables que interesan del motor. En el caso del par o torque, es indispensable conseguir
la forma en que la potencia de la máquina está denida a partir de los parámetros de
ejes (directo y de cuadratura), para ello se parte de la ecuación de potencia real a partir
de su forma compleja Pin = Re {V I ∗ } tal y como se aprecia entre (2.13) y (2.16)
n
→
− ∗o
→
−
Pin = Re v abc i abc
= Re {[Va + Vb 6 120 + Vc 6 240] [ia + ib 6 − 120 + ic 6 − 240]∗ } (2.13)
Pin =
3
(va ia + vb ib + vc ic )
2
(2.14)
Pero se debe emplear el mismo principio para expresar la potencia en términos de las
variables dq
n
o
∗
→
−
−
Pin = Re →
v abcs i abcs
(2.15)
Efectuando las manipulaciones por medio de la teoría de ejes directo y de cuadratura,
por medio una vez más de la transformada de Park, se obtiene:
Pin =
3
(vds ids + vqs iqs + vdr idr + vqr iqr )
2
(2.16)
Se puede extender el cálculo de la potencia electromagnética, para el caso de una
máquina de dos polos, de la forma:
n
3
→
− →
− ∗o
Pin = Im ωr Lm i qds i qdr
2
(2.17)
CAPÍTULO 2.
12
ANTECEDENTES
En el caso de una máquina de Ppo polos, de nuevo en un marco de referencia dq, se
procede a calcular el torque o par electromagnético por medio de la ecuación:
τe =
n→
3 Ppo
− →
− ∗ o 3Ppo
Lm Im i qds i qdr =
Lm (iqs idr − ids iqr )
2 2
4
(2.18)
Una vez conseguida la expresión (2.18), queda denido cómo se comporta el torque de
la máquina en función de las corrientes de eje directo y de cuadratura. Esto es de suma
utilidad a la hora de ser empleado en un sistema de control vectorial indirecto, debido
a que permite calcular el par partiendo de las corrientes dq.
No obstante la expresión de par (2.18) se ve cómo son necesarias las corrientes de eje
directo y de cuadratura del rotor, estas corrientes no se pueden obtener en la práctica
por lo que se deben conseguir una forma alternativa de calcular el par, empleando
solamente las corrientes dq del estator.
2.3.3.
Estimación del torque electromagnético
Una forma de expresar el torque electromagnético fue detallada por (2.18), sin embargo
de esta ecuación se puede obtener una en términos de los ujos magnéticos por medio
de:
3Ppo
Lm (λdr iqs − λqr ids )
(2.19)
τe =
4
Ahora, en el uso del control vectorial se sabe que el ujo de eje de cuadratura del rotor
λqr , será igual a cero, por lo que se reducen los términos de (2.19). Además, recordando
que las mediciones en el rotor son prácticamente imposibles, se puede estimar el campo
magnético λdr por medio de la corriente de eje directo del estator tal y como se ve en
(Iqbal, 2003):
Rr Lm
λdr =
ids
(2.20)
Lr s + Rr
τe =
3Ppo
Lm λdr iqs
4
(2.21)
Así, las expresiones (2.20) y (2.21) denen la forma en que el torque o par electromagnético es calculado en el sistema vectorial, empleando las corrientes del estator.
CAPÍTULO 2.
ANTECEDENTES
13
2.4. Control vectorial indirecto del motor de inducción
Las herramientas matemáticas descritas hasta el momento, permiten la aplicación del
método de control vectorial indirecto, por medio de la transformada de Park (2.5),
junto con la teoría de vectores espaciales, se consigue modelar la máquina de inducción
por medio de un conjunto de variables que alcanzan estados estables, además de ser
lineales, dentro del ámbito de operación. Con esto se puede plantear el esquema de
control en cascada que se emplea, partiendo de las variables dq.
2.4.1.
Modelo de la máquina
Partiendo de las transformaciones descritas, se puede plantear un modelo de la máquina
de inducción para ser utilizado en el método de control vectorial.
Propuesta de Kazierkowski et al. (2002) para el modelo del motor
El sistema consta de un inversor de tensión, que es visto como una función de transferencia de primer orden, el polo del inversor es rápido y se considera como ruido en
el sistema, desde el punto de vista dq. Las ecuaciones empleadas para denir las tensiones dq dentro del modelo que plantea Kazierkowski et al. (2002) corresponden a las
detalladas en:
Lm Rr
− Lr 2 Ψr
Vds
sσLs + rim
−ωe σLs
ids
(2.22)
=
+
Vqs
ωe σLs
sσLs + rim
iqs
− LLmr ωr Ψr
donde la correspondencia de nomenclatura se detalla en el cuadro 2.1.
En el diagrama propuesto por Kazierkowski et al. (2002) se notan tres partes importantes: Controller que corresponde precisamente a los primeros controladores del sistema;
Inverter corresponde a un modelo de primer orden sin tiempo muerto que aproxima la
dinámica del inversor y stator winding que detalla el modelo del estator en un marco
dq. En el diagrama del estator se tiene una nomenclatura distinta a la empleada en
este trabajo, su correspondencia se anota en el cuadro 2.1.
Propuesta de Phung and Dittrich (2008) para el modelo del motor
De nuevo, partiendo de las variables del estator, que se pueden obtener desde un punto
de vista práctico, se deduce un modelo del motor sincrónico. El modelo propuesto por
CAPÍTULO 2.
14
ANTECEDENTES
Cuadro 2.1: Correspondencia de parámetros
Kazierkowski et al. (2002)
Xm
Xs
Xr
rr
σ
xσ
rim
isx
isy
Ψr
ωs
Nomenclatura del trabajo
Lm
Ls
Lr
Rr
2
1 − LLrmLs
σL
s 2
Rs + LLmr Rr
ids
iqs
λdr
ωe
Phung and Dittrich (2008) expone, a partir de las señales de tensión en eje directo y de
cuadratura, como se obtienen las demás señales de interés (torque, velocidad angular
eléctrica y mecánica, ujo), por medio de las cuales se puede implementar el esquema
de control vectorial indirecto. El modelo se aprecia en la gura 2.6.
Figura 2.6: Modelo del motor sincrónico (Phung and Dittrich, 2008)
Todas las constantes que aparecen en el modelo pueden ser expresadas en términos
de las constantes del motor empleadas hasta el momento, tal y como se aprecia en el
cuadro 2.2.
CAPÍTULO 2.
15
ANTECEDENTES
Cuadro 2.2: Correspondencia de parámetros con Phung and Dittrich (2008)
Phung and Dittrich (2008)
Nomenclatura del trabajo
Tσ
zp
H
mM
mW
U sd
U sq
ψrd
ωs
2.4.2.
Lm 2
Lr Ls
Lr
Rr
Ls
Rs
1−
σ
Tr
Ts
1
σTs
+
1−σ
σTr
−1
Ppo
2
B
2
Te
Tl
V ds
V qs
λdr
ωe
Esquema de control vectorial indirecto
El método consiste en obtener, mediante bloques de cálculo, cinco variables de la máquina que denen su comportamiento. En la práctica estas variables salen de las corrientes trifásicas y de la velocidad angular del motor. Estas cuatro variables son las
que se pueden medir en la realidad.
El modelo del motor puede ser uno de los descritos, que permiten observar las cinco
señales de control:
iqs Corriente de cuadratura del estator
ids Corriente de eje directo del estator
P hir Flujo magnético del rotor en el eje directo
Te Par electromagnético
ωm Velocidad angular del eje del motor
En el modelo de Kazierkowski et al. (2002) no se muestran algunas de las variables, al
menos en el diagrama de bloques, aunque si se detalla su comportamiento en el libro.
Por su parte, el diagrama de bloques de Phung and Dittrich (2008), muestra por medio
de funciones de transferencia la dinámica de la máquina de inducción luego de aplicar
la conversión (abc − dq ).
El esquema de control vectorial parte de la dinámica dq del motor, para realizar el
control en cascada de la forma en que se observa en la gura 2.7. Los controladores
CAPÍTULO 2.
ANTECEDENTES
16
de corriente (Cd , Cq ), reciben el valor deseado de los controladores Cf y Cp respectivamente, los cuales a su vez reciben su valor deseado de otra fuente. En el caso del
controlador de ujo (Cf ), el valor deseado llega de un bloque no lineal que considera el
debilitamiento del ujo al superar la velocidad de quiebre, como se verá en la sección
3.2.1.
Finalmente, el controlador de velocidad debe mantener el sistema con una velocidad
deseada, y se encarga de darle el valor deseado al controlador de par. Con esta serie de
realimentaciones y control en cascada, se consigue llevar de forma adecuada el sistema,
desde un punto de operación de velocidad hasta otro, manipulando las variables internas
para no sobre esforzar la máquina.
Al esquema de la gura 2.7, le hace falta un bloque importante, la red de desacople,
que debe ser diseñada considerando los acoples por ujo magnético, para eliminar por
completo el acople y separar así los lazos de control.
Figura 2.7: Esquema de control vectorial indirecto
2.4.3.
Red de desacople propuesta por Kazierkowski et al. (2002)
El modelo simplicado del motor que se emplea en el diseño de esta red de desacople, desprecia partes del modelo matemático, que el autor explica es posible omitir sin
perder información relevante para el sistema, ya que son consideradas como perturbaciones. El diagrama de bloques que expone la red de desacople propuesta se aprecia en
la gura 2.8. Se observa que la interacción dada por el ujo magnético ha sido omitida,
esta simplicación termina en el cálculo de la red de desacople que se ve en la gura
2.8 la cual no desacopla en ningún momento el ujo magnético.
Para poner a prueba la red propuesta por Kazierkowski et al. (2002) se le aplica una
entrada escalón en cada una de las tensiones dq, es decir a la salida de los controladores
CAPÍTULO 2.
ANTECEDENTES
17
Figura 2.8: Red de desacople de (Kazierkowski et al., 2002)
de la gura 2.8. Los escalones se dan en distintos tiempos y la respuesta dinámica se
aprecia en la gura 2.9. Se notan dos problemáticas para proseguir con la sintonización
de los controladores; la primera es que el desacople no se logra por completo, ya que
en el segundo 4 ambas corrientes cambian, aunque el cambio en iq es muy pequeño.
La segunda problemática es que las respuestas aparentes no se comportan como un
sistema de primer orden, principalmente iq , la cual no alcanza un nuevo estado estable
ante un cambio en su entrada Vq . Se conrma que se debe diseñar una red de desacople
que considere la interacción introducida por el ujo magnético.
Figura 2.9: Respuesta de la red de desacople de Kazierkowski et al. (2002)
CAPÍTULO 2.
2.4.4.
18
ANTECEDENTES
Estimación de la velocidad angular
ωe
Para lograr implementar una red de desacople, se debe contar con una estimación adecuada de la velocidad angular eléctrica ωe , para lo cual serán empleadas las ecuaciones
de la matriz (2.12) que denen las tensiones Vdr y Vqr , las cuales son cero en un motor
de jaula de ardilla.
Una forma útil de reescribir las ecuaciones (2.12) del rotor, en términos de los ujos
magnéticos se plantea en (Iqbal, 2003):
donde:
Vdr = Rr idr + pλdr − (ωe − ωr ) λqr
Vqr = Rr iqr + pλqr + (ωe − ωr ) λdr
(2.23)
λdr = Lm ids + Lr idr
λqr = Lm iqs + Lr iqr
(2.24)
Como ya se mencionó, en una máquina de inducción de jaula de ardilla las tensiones
Vdr y Vqr son iguales a cero. Además, en un sistema de control vectorial indirecto se
cumple que el ujo magnético del rotor en su eje q (λqr ) es cero (Iqbal, 2003). De estas
dos consideraciones surgen ecuaciones útiles para la estimación de variables, como el
ujo λdr y la velocidad angular ωe :
λqr = Lm iqs + Lr iqr = 0
i
⇒ iqr = − Lm
Lr qs
⇒ 0 = Rr iqr + (ωe − ωr ) λdr
(ωe − ωr ) = − Rλrdriqr = RLr Lr λmdriqs
ωe = RLr Lr λmdriqs + ωr
(2.25)
De las expresiones (2.25) se puede calcular ωe , sin embargo no se ha descrito la forma
en que se estimará el ujo λdr . Para ello se parte de nuevo del hecho de que λqr = 0 y
que Vqr = 0 y se utilizan (2.23) y (2.24) para obtener (Iqbal, 2003):
λdr =
Lm
ids
+1
Lr
s
Rr
(2.26)
En (2.26) se expone el ujo λdr como función de ids , con lo cual se cierra en ciclo de
cálculos a partir de variables que en este punto son conocidas(ωr , ids , iqs ).
Las estimaciones para la velocidad angular eléctrica, o el ujo magnético son contempladas en el modelo propuesto por Phung and Dittrich (2008), con algunos cambios en
las constantes, descritos en el cuadro 2.2.
Capítulo 3
Pruebas de validación
Con la intención de pasar a la etapa de implementación del sistema de control de velocidad de un motor de inducción, se procede a implementar un diagrama de simulación.
R por medio de la aplicación de
R . Da
El software empleado fue
do que el sistema se compone de varias secciones, se deberán probar una a una para
comprobar que se simula el sistema de la forma descrita en la literatura.
Matlab
Simulink
El presente capítulo expone las pruebas realizadas a las secciones del sistema, así como
la explicación de la forma en que se sintonizaron los controladores y sus posteriores
pruebas de funcionamiento. Además de una exposición sobre la red de desacople diseñada, que permite precisamente la sintonía de los controladores, utilizando un modelo
de planta aparente que se obtiene tras aplicar el desacople. Como se verá en las pruebas efectuadas, la red de desacople diseñada en este trabajo, proporciona un avance
importante dentro del método de control vectorial, ya que permite verdaderamente
desacoplar el sistema y obtener procesos aparentes mucho más simples.
3.1. Diseño de la red de desacople
Dentro del método de control vectorial indirecto se debe utilizar un modelo del motor
que se está controlando. En la literatura se han descrito varios modelos eléctricos del
motor de inducción. Para el diseño de la red de desacople, se utilizó un modelo que
toma en cuenta las variables del estator, expuesto por Phung and Dittrich (2008), en
la sección 2.4.1.
A partir del modelo de la gura 2.6, se pueden escribir las expresiones que denen las
19
CAPÍTULO 3.
20
PRUEBAS DE VALIDACIÓN
corrientes dq de la forma:
ids =
Tσ
Tσ s+1
1
V
σLs ds
+ ωe iqs +
0
1−σ
λ
Tr σ dr
(3.1)
iqs =
Tσ
Tσ s+1
1
V
σLs qs
− ωe ids −
0
1−σ
ωλdr
σ
De las ecuaciones anteriores y en busca de conseguir un modelo desacoplado, se pueden manipular los términos de las expresiones de (3.1), para conseguir un conjunto
desacoplado por completo, incluyendo el acople generado por el ujo magnético.
La red de desacople consiste en restar al término de tensión de eje directo Vds , los otros
dos sumandos de (3.1), de forma que se anulen por medio de la red. Del mismo modo,
a la tensión de eje de cuadratura Vqs , se le suman los términos de la resta que generan
el acople, con lo cual se anula también esta interacción. Tal y como se aprecia en:
0
Vds = Vds − ωe σLs iqs −
0
Ls
(1
Tr
− σ)λdr
0
Vqs = Vqs + ωe σLs ids + zp Ls (1 − σ)ωm λdr
0
0
(3.2)
0
donde Vds y Vqs son las entradas de la red de desacople y los parámetros presentes
corresponden a los detallados en el cuadro 2.2.
Para la red de desacople entonces son necesarias, tres señales de realimentación como
los son las corrientes (ids , iqs ), y el ujo magnético, que como ya se mencionó en la
sección 2.4, se pueden obtener mediante bloques de cálculo, a partir de las corrientes
trifásicas del motor y de la velocidad angular mecánica.
Al aplicar las ecuaciones (3.2), por medio de los bloques de cálculo, se obtiene una red
de desacople que fue desarrollada de forma analítica. La red generará un nuevo par de
corrientes dq, que no se encuentran acopladas entre sí, ni con el ujo magnético. El
diagrama de bloques se aprecia en la gura 3.1.
Entonces, dado que la red de desacople es analítica, se puede obtener un proceso aparente que verán los controladores, también analítico, el cual será el mismo para ambas
corrientes:
Tσ
σLs
(3.3)
Tσ s + 1
con el cual se puede proceder a sintonizar los controladores de corriente, como se verá
en la sección 3.2.
Pd,q =
Para comprobar su funcionamiento, la red debería de conseguir que; ante un cambio
escalón en la tensión Vds , la corriente iqs no cambiara del estado estacionario en el que
se encontraba, mientras que la corriente ids debe tener una respuesta de primer orden.
CAPÍTULO 3.
PRUEBAS DE VALIDACIÓN
21
Figura 3.1: Red de desacople propuesta
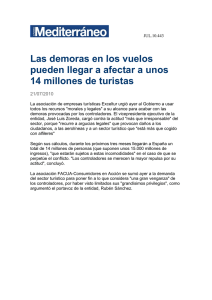
En la gura 3.2 se muestra la dinámica ante el escalón descrito, se ve como para la
corriente ids , se tiene una respuesta de primer orden mientras que la corriente iqs no se
altera.
Figura 3.2: Modelos aparentes al colocar la red
Ante un cambio escalón en Vqs se obtuvo un comportamiento similar al anterior. En
la gura 3.2 se muestra el desacople con ids , además de la respuesta de primer orden
obtenida para iqs . De este modo se ha conseguido tener un modelo de primer orden
para cada una de las corrientes dq, que además no tiene acople alguno, incluyendo el
que generaba el ujo magnético.
En la gura 3.3 se muestran las interacciones en el sistema sin implementar la red de
desacople, se ve que además de tener una interacción que lleva las variables a distintos
puntos de operación, los modelos no son de primer orden.
Se consigue demostrar entonces, que la red de desacople propuesta representa un avance
importante ante la que se detalla en Kazierkowski et al. (2002). Ya que el desacople
CAPÍTULO 3.
PRUEBAS DE VALIDACIÓN
22
Figura 3.3: Respuesta dinámica del sistema sin red de desacople
conseguido es completo, incluyendo la interacción generada por el ujo magnético y
la generada entre sí por las corrientes dq. Este avance permite conseguir plantas de
primer orden vistos por los controladores, que son analíticos, con lo cual la sintonía se
puede realizar por algún método conocido. Además, como se verá en la sección 3.2.2, al
trabajar en lazo cerrado, los acoples de corriente usando la red de Kazierkowski et al.
(2002) no se eliminan por completo. En el caso de la red propuesta sí se consigue un
funcionamiento de lazo cerrado completamente desacoplado.
3.2. Sintonización de controladores
La nalidad principal de este trabajo es aplicar una regla de sintonización analítica,
para los cinco controladores PI que forman parte del esquema de control vectorial
indirecto de la gura 2.7. Para ello, se plantea una forma de abordar el problema que
fue desarrollada; entre las ecuaciones que denen las variables del motor y algunas
pruebas que serán descritas. Esta regla es analítica sin embargo no es única, puede ser
puesta a prueba con más motores o ser modicada en el futuro.
CAPÍTULO 3.
3.2.1.
23
PRUEBAS DE VALIDACIÓN
Descripción del orden de la sintonía
Una vez que la red de desacople se agrega al sistema, la relación entre corrientes y
tensiones de eje directo y de cuadratura, puede ser vista como un sistema de control
de dos variables, respectivamente con las parejas de control: (Vds , ids ) y (Vqs , iqs ) y
proceder con las plantas aparentes vistas para la sintonización analítica.
El diagrama de bloques que representa el sistema completo se expone en la gura 3.4.
Donde las respectivas plantas están detalladas por medio de las expresiones:
Pd =
Pf =
Tσ
σLs
Tσ s+1
Lm
Tr s+1
Pt =
Pq =
Pω =
Tσ
σLs
Tσ s+1
1
zp
2J
s+1
zp H
(3.4)
3Ppo Lm 2
4Lr
Según el diagrama del modelo de Phung and Dittrich (2008) y los datos del cuadro
2.2. El el diagrama de 3.4, se da por hecho que la red de desacople está incorporada al
sistema.
Figura 3.4: Diagrama de bloques empleado para la sintonía
Una diferencia que se da entre el diagrama de bloques de Phung and Dittrich (2008),
en comparación con (3.4), es que la dinámica de la planta Pω , considera la aplicación de
la segunda ley de Newton a sistemas mecánicos rotacionales para su deducción (Loría,
2008), mientras que en Phung and Dittrich (2008) se considera como un integrador.
Esta diferencia fue corregida en el modelo empleado para las pruebas.
El bloque f (ω) es no lineal y se encarga de colocar el valor de ujo deseado, con base
en el debilitamiento de ujo (Iqbal, 2003). El valor deseado del ujo será λmax en caso
de que la velocidad angular sea menor que la velocidad de quiebre y se multiplicará
por la proporción entre la velocidad angular y la de quiebre (ωmq /ωr ). En el caso de
CAPÍTULO 3.
PRUEBAS DE VALIDACIÓN
24
que la velocidad sea mayor que la de quiebre, la velocidad de quiebre corresponde a la
velocidad nominal del motor.
La reducción en el valor deseado de ujo, se lleva a cabo para no poner al motor
en operación de sobre carga, ya que si se requiere más velocidad que la nominal y se
mantiene constante el ujo, se requeriría más amplitud de tensión de la que proporciona
la fuente, además de perder el control de las corrientes. Para el motor empleado en esta
prueba la velocidad de quiebre es de ωmq = 200rad/s.
Las plantas Pd y Pq se obtienen directamente de aplicar el método de desacople expuesto
en la sección 3.1. Por su parte Pf se obtiene a partir de la ecuación (2.26), del proceso
de estimación del ujo. Para Pt se tiene que es una constante que al ser multiplicada
por iq y por el ujo λdr se obtiene el par electromagnético, esta constante también
sale del análisis de las variables de la máquina sincrónica en el marco de referencia dq
(Iqbal, 2003).
Se tiene un serie de primeros pasos muy clara, sintonizar los controlador Cd y Cq luego
el Cf , por medio de algún método analítico de sintonía como la síntesis del servo control
o el método ART2 detallado en Alfaro et al. (2008). Se habla de emplear el servo control
y no el control regulatorio debido a que los valores consigna de todos los controladores
estarán en constante cambio en un tipo de sistema que pretende conseguir una velocidad
variable.
Una vez sintonizados estos controladores, se puede hacer una reducción de bloques así
como una estimación, que será detallada más adelante, para la sintonía del controlador
de par Cp . Finalmente se reducen los bloques restantes y se procede con el cálculo de
los parámetros del controlador de velocidad Cv . Todos los pasos y las consideraciones
seguidas para llevar a cabo este proceso serán descritos en las secciones 3.2.2, 3.2.3 y
3.2.4.
Para observar las señales de control del sistema, se colocaron bloques de normalización
a la salida de cada una de las mediciones, esto con el n de observar el comportamiento
de cada señal en un intervalo de 0 a 100 %. En un sistema de control es fundamental que todas las señales empleadas, sean normalizadas en este rango para su clara
observación.
3.2.2.
Controladores
Cd
y
Cq
Los procesos vistos por los controladores de corriente, se detallaron en la gura 3.2,
en donde se nota como la dinámica corresponde a un sistema de primer orden sin
tiempo muerto, conseguido gracias a la red de desacople propuesta. Una vez conocidas
las plantas aparentes que verán los controladores Cd y Cq según (3.4), que pueden ser
CAPÍTULO 3.
25
PRUEBAS DE VALIDACIÓN
representadas por:
Pd,q =
Tσ
σLs
Tσ s + 1
=
Kd,q
Tσ s + 1
(3.5)
Las ecuaciones empleadas para la sintonización, corresponden al método ART2 para
plantas de primer orden sin tiempo muerto:
Tid = Tσ τd (2 − τd )
Kcd =
2−τd
Kd τd
βd,q =
Tiq = Tσ τq (2 − τq )
Kcq =
2−τq
Kd τq
(3.6)
1
2−τd,q
donde, Tid y Tiq son las constantes de tiempo integral y Kcd y Kcq las ganancias de los
controladores, además βd,q son los factores de peso del valor deseado.
Se escoge este método debido a su robustez ante cambios en los parámetros de la
máquina, lo cual es muy frecuente. Es conocido que el parámetro de diseño (τ ), es una
proporción entre las constantes de tiempo de lazo cerrado y del modelo aparente, con
lo cual se controlada la velocidad de respuesta de lazo cerrado, en este caso se escoge
un valor de τ menor a 1, se toma τd,q = 0,8 para no generar una respuesta de lazo
cerrado demasiado rápida.
La función de transferencia de lazo cerrado que se obtiene es importante para la sintonía
de los controladores amos, es decir que se encargan de darle el valor deseado a los
controladores de corriente, debido a que se emplea en este caso el método ART2 , las
funciones de transferencia de lazo cerrado corresponden a:
Myrd =
1
τd Tσ s + 1
Myrq =
1
τq Tσ s + 1
(3.7)
El funcionamiento de los controladores, ante un cambio escalón en el valor deseado de
las corrientes (ids , iqs ) se observa en la gura 3.5. Tal y como se esperaba, se consigue
una respuesta de lazo cerrado de primer orden, con su velocidad de respuesta controlada
por medio de los parámetros de diseño.
En esta parte de la prueba no se realizan pruebas ante la perturbación, esto se debe
a que la perturbación que tiene el sistema se encuentra el par de carga, el cual no es
controlado en este nivel.
Para vericar que la red de desacople propuesta en este trabajo, introduce un benecio
importante al método de control vectorial, se realizó una prueba escalón pero utilizando
la red de desacople propuesta por Kazierkowski et al. (2002), se sintonizó por medio
del mismo método y se obtuvieron los resultados de la gura 3.6, en la cual se conrma
CAPÍTULO 3.
PRUEBAS DE VALIDACIÓN
26
Figura 3.5: Respuesta de lazo cerrado para corrientes ids , iqs , ART2
que esta red no logra desacoplar correctamente el valor de corriente de cuadratura. Por
su parte, la corriente de eje directo presenta un pequeño sobrepaso, que no se dio al
usar la red de desacople propuesta. Considerando estos dos hechos, se conrma que
es mejor colocar la red diseñada, para obtener mejores resultados en el control de las
corrientes dq.
Figura 3.6: Respuesta de lazo cerrado ids , iqs , red de Kazierkowski et al. (2002)
3.2.3.
Controladores
Cf
y
Cp
Debido a que se tiene un sistema en cascada, los controladores secundarios deben darle
el valor deseado a los internos, sintonizados previamente, para ello se requiere conocer la
planta aparente vista por Cf y por Cp , siguiendo con la secuencia descrita y observando
de nuevo el diagrama de bloques de la gura 3.4 se observa que la planta aparente para
CAPÍTULO 3.
27
PRUEBAS DE VALIDACIÓN
Cf corresponde a:
0
Pf = Myrd Pf =
Lm
1
(τd Tσ s + 1) (Tr s + 1)
(3.8)
Se obtiene entonces una planta con dos polos, sin embargo por las condiciones del sistema se sabe que τd será menor que 1 por lo tanto el polo dado por Tr será relativamente
lento y mucho más inuyente en la dinámica que el polo τd Tσ . Pensando en reducir
la planta para sintonizar el PI se utilizó el método 123c (Alfaro, 2011) para obtener
una planta de primer orden con tiempo muerto, en todos los casos el tiempo muerto
era despreciable (al menos 100 veces menor que la constante de tiempo de la planta
resultante), por lo tanto se decidió sumar ambas constantes de tiempo y así obtener
una planta aparente con un polo y sin tiempo muerto:
00
Pf =
Lm
Lm
=
(Tr + τd Tσ ) s + 1
Tf s + 1
(3.9)
donde:
(3.10)
Tf = Tr + τd Tσ
Para vericar si esta planta modela adecuadamente la variable de ujo magnético, se
le aplicó un cambio escalón al valor deseado de corriente ids , al realizar esta prueba
se obtuvo la curva que se aprecia en la gura 3.7, que conrma la respuesta dinámica
esperada. Una vez obtenida la planta reducida:(3.9) se puede usar de nuevo el método
ART2 para calcular los parámetros del controlador Cf :
Tif = Tf τf (2 − τf )
Kcf =
2 − τf
Lm τf
βf =
1
2 − τf
Figura 3.7: Curva de λdr ante una entrada escalón
(3.11)
CAPÍTULO 3.
PRUEBAS DE VALIDACIÓN
28
En este caso se tendrá una función de transferencia de lazo cerrado de primer orden
sin tiempo muerto, dada por:
1
(3.12)
Myrf =
τf Tf s + 1
Para vericar el funcionamiento del controlador de ujo, se le aplicó un cambio escalón
en el valor deseado y se obtiene la respuesta de la gura 3.8, en la cual se conrma
que la función de transferencia de lazo cerrado corresponde a una de primer orden sin
tiempo muerto. Para esta prueba se usa un parámetro de diseño τf de 0,8, con lo cual
se alcanza el valor deseado en un 80 % de la velocidad de la planta aparente.
Figura 3.8: Respuesta de lazo cerrado para λdr , ART2
En la sintonización del controlador de par Cp se da un problema, la planta aparente vista
no se puede obtener analíticamente, está presente un punto de multiplicación con la
salida de la planta Pf como se aprecia en la gura 3.4. Se indagó sobre la forma de tratar
este problema, no obstante, debido a la no linealidad que una multiplicación introduce
en esta parte del diagrama, no se puede seguir con una reducción analítica.
Se decidió hacer un cambio en el diagrama de bloques, para conseguir una planta
aparente que siguiera estando en términos de las constantes del motor y algunos otros
parámetros de diseño. Este cambio se sometió a las pruebas del caso, para vericar si
los resultados obtenidos tanto en el modelo empleado como en la sintonía producían
respuestas aceptables.
Considerando que la ganancia de la función de transferencia de lazo cerrado Myrf es
unitaria, y que la dinámica más rápida dentro de las funciones que denen este lazo es
Tσ , se plantea que la planta aparente vista por el controlador Cp sea de la forma:
0
P =
1
Kp
3Lm 2 Ppo
=
8Lr Tσ s + 1
Tp s + 1
(3.13)
CAPÍTULO 3.
PRUEBAS DE VALIDACIÓN
donde
3Lm 2 Ppo
Kp =
8Lr
29
(3.14)
Esta aproximación, es usada para la sintonía del controlador, en ningún momento se
hace cambio alguno en el modelo correspondiente al motor. Al aplicarle un cambio
escalón a la salida de Cp , se verica que la respuesta es de primer orden sin tiempo
muerto, tal y como se detalla en la gura 3.9.
Figura 3.9: Respuesta de Te ante una entrada escalón
Una vez estimada la planta aparente vista, se pueden calcular los parámetros del controlador PI encargado del par, se utiliza de nuevo el método ART2 y un parámetro de
diseño τp de 1,5 debido a que la variable externa es igual de rápida que la interna, por
lo tanto se pretende hacer un poco más lenta la variable externa. Las ecuaciones de
sintonización se observan en:
2 − τp
βp = 1
(3.15)
Tip = Tp τp (2 − τp )
Kcp =
Lm τp
Si τp ≥ 1 entonces βp = 1
Aún es este punto no se puede ver la respuesta del sistema ante una perturbación, ya
que, como se ve en el diagrama de la gura 3.11, la perturbación es corregida por el
controlador de velocidad. La respuesta de lazo cerrado para el controlador de par, se
detalla en la gura 3.10, en donde se aprecia la forma en que se alcanza el valor deseado.
Para elegir el valor adecuado del parámetro de diseño τp se observa un detalle relevante:
El controlador de par está en cascada con el controlador de corriente de cuadratura, en
un sistema en cascada debe darse que la variable del lazo interno (iq en este caso), sea
mucho más rápida que la variable del lazo externo (Te ), esto no ocurre en este caso.
Por ese motivo, se escoge un parámetro de diseño mayor a 1, con la idea de hacer un
poco más lenta la variable de par, para eso el método ART2 indica un factor de peso
del valor deseado de 1, con lo cual se tiene un PI de un grado de libertad.
CAPÍTULO 3.
30
PRUEBAS DE VALIDACIÓN
Figura 3.10: Respuesta de Te ante cambio en el valor deseado, ART2
3.2.4.
Controlador
Cv
Con base en el cambio realizado para la sintonía del controlador Cp se debe seguir el
orden para calcular los parámetros del controlador de velocidad Cv , este es el controlador encargado de seguir el valor deseado del sistema, así como de corregir los efectos
de la perturbación (Tl ).
Figura 3.11: Lazo de control para velocidad angular
El diagrama de bloques empleado para sintonizar el controlador Cv se aprecia en la
gura 3.11. Se ve que la planta aparente vista por el controlador será la multiplicación
de la planta Pω con Myrp , según lo expuesto antes, la velocidad de respuesta de Myrp
será mucho mayor que la de Pω , además Myrp tiene ganancia unitaria, por lo que la
planta equivalente vista por el controlador Cv será de la forma que se detalla en:
1
zp
0
Pω = =
2J
zp H
+ τp Tp s + 1
1
zp
Tv =
donde:
Kv =
Kv
Tv s + 1
2J
+ τp Tp
zp H
(3.16)
(3.17)
Una vez más se decide representar dos polos, como uno solo, debido a la velocidad
relativa entre ellos, lo cual indica que el polo introducido por la parte mecánica es
CAPÍTULO 3.
PRUEBAS DE VALIDACIÓN
31
mucho más lento que el otro polo. Para vericar el modelo empleado para la planta
0
aparente Pω , se debe llevar el sistema a un estado estacionario de velocidad y aplicarle
un salto escalón al valor deseado de par, que corresponde a la salida del controlador de
velocidad. Este procedimiento dio como resultado la curva de la gura 3.12, en el cual
se nota que la velocidad angular es mucho más lenta que las variables internas, además
de demostrar que es válido usar un modelo de primer orden sin tiempo muerto para
modelar su dinámica.
Figura 3.12: Respuesta de ωm ante un cambio escalón
Ahora es posible sintonizar analíticamente el controlador de velocidad, tal y como
se ha venido haciendo con los anteriores, usando el método ART2 se obtienen las
expresiones:
1
2 − τv
βv =
(3.18)
Tiv = Tv τv (2 − τv )
Kcv =
Lm τv
2 − τv
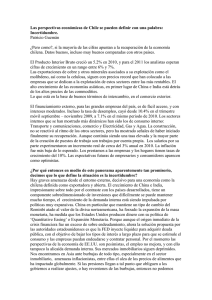
Al vericar el funcionamiento del lazo de control de velocidad, se puede observar ahora
sí, como responde el sistema ante una perturbación del tipo escalón y ante un cambio
en el valor deseado. El cambio en el valor deseado se realizó a los 4 s mientras que la
perturbación se dio a los 7 s, la respuesta de servo control y de control regulatorio para
la velocidad se aprecia en la gura 3.13. Se observa en ambos casos que se alcanza el
valor deseado de velocidad, a pesar de tener una carga mayor. Además de alcanzarlo
con la forma de una función de transferencia de lazo cerrado, de primer orden, tal y
como se obtiene al sintonizar una planta de primer orden por medio del método ART2 .
También se aprecia que la velocidad de la función de transferencia de lazo cerrado,
es mayor que la de la planta, debido a que se escogió un parámetro de diseño τv de
0,01
CAPÍTULO 3.
PRUEBAS DE VALIDACIÓN
32
Figura 3.13: Control de velocidad, ART2
3.3. Pruebas con un perl de velocidad
Una vez que se ha concluido con el orden de sintonía propuesto, se procede a vericar
como responde el sistema ante distintas condiciones de operación, primero se verá la
forma en que se sigue un perl de valor deseado de velocidad, ante un cambio escalón
en el par de carga. Luego se tratará de seguir el mismo perl pero ante un cambio en
forma de rampa del par de carga.
3.3.1.
Cambio escalón de par (perturbación)
Se muestran en la gura 3.14, la forma en que se sigue el valor deseado de velocidad
ante un cambio escalón de par, aplicado a los 4 s, se ve claramente que al usar el método
ART2 se consigue una mejor respuesta como regulador, que al emplear la síntesis del
servo control.
3.3.2.
Cambio rampa en par de carga
Se coloca el sistema en una prueba en donde se le da el mismo perl de velocidad que
en el caso anterior, no obstante, esta vez se le da un par de carga en forma de rampa,
tal y como se muestra en la gura 3.15, se aprecia que al utilizar el método ART2 , se
consigue regular adecuadamente la velocidad, manteniendo un valor constante durante
la aplicación de la rampa de carga. De nuevo, la síntesis del servo control no consigue
mantener el valor deseado ante una perturbación.
Al realizar las pruebas anteriores se sobre pasa la velocidad de quiebre, por lo que
el valor deseado de ujo debe reducirse proporcionalmente a este sobrepaso, el ujo
CAPÍTULO 3.
PRUEBAS DE VALIDACIÓN
33
Figura 3.14: Perl de velocidad, escalón de par
Figura 3.15: Perl de velocidad, rampa de par
magnético responde de la forma que se ve en la gura 3.16, en la cual se conrma el
buen funcionamiento del sistema al superar la velocidad de quiebre.
CAPÍTULO 3.
PRUEBAS DE VALIDACIÓN
Figura 3.16: Debilitamiento de ujo
34
Capítulo 4
Conclusiones y recomendaciones
4.1. Conclusiones
La red de desacople se vuelve fundamental dentro del método de control vectorial,
obtener modelos desacoplados gracias a ella permite una sintonía analítica. Además
de conseguir plantas aparentes de primer orden, los resultados sin red de desacople de
hecho no permitían identicar un modelo, a partir de su curva de reacción. Esto último
sí sería posible, en caso de contar con la red de desacople diseñada en este trabajo.
En un sistema de control en cascada es necesario que la variable del lazo interno sea
más rápida que la del lazo externo, se recomienda al menos diez veces para no afectar la
operación correcta del lazo de control. En el caso del par electromagnético, en cascada
con la corriente de cuadratura, no se cumple esta relación, sin embargo no se tiene en
este caso una perturbación corregida por el lazo interno, como normalmente se hace en
un sistema en cascada. Además, la corriente de cuadratura dene la forma en que el
par varía, teniendo la corriente de eje directo constante para generar una fuente de par,
por medio del ujo magnético. Es decir, la utilidad del control en cascada empleado en
este trabajo, consiste en llevar la corriente de cuadratura a un valor tal que; consiga
el par demandado por la carga, manteniendo la velocidad en el valor deseado. Dado
que la perturbación es corregida por un tercer controlador, como lo es el controlador
de velocidad Cv .
Para las variables internas (ids , iqs ) de los lazos de control, así como para el ujo
magnético, se probó que métodos de sintonía analíticos pueden ser empleados y se
obtienen prácticamente los mismos resultados, en todos estos casos se prerió el método
ART2 sobre la síntesis del servo control debido únicamente a su robustez.
Debido a que se diseñó una red de desacople adecuada, es posible por medio de parámetros de diseño regular la velocidad con que el sistema responde ante un cambio escalón.
35
CAPÍTULO 4.
CONCLUSIONES Y RECOMENDACIONES
36
En caso de emplear la red de Kazierkowski et al. (2002), los parámetros de diseño no
cumplen su nalidad, ya que la dinámica del proceso aparente es más compleja.
En las pruebas que se sigue un valor deseado de velocidad, con un perl diferente al
escalón, se conrma la utilidad del método de control vectorial para dar una velocidad
deseada precisa, ya que es posible mediante una sintonía adecuada, seguir el valor
deseado a pesar de tener distintos valores de par en el eje del motor.
Se demostró que la red de desacople propuesta por Kazierkowski et al. (2002) no elimina del todo la interacción entre las corrientes dq, lo cual afecta el rendimiento del
sistema de control vectorial. La forma de corregir este problema es emplear la red
de desacople diseñada en este trabajo, que consigue un desacople completo, así como
plantas aparentes simples (PO).
4.2. Recomendaciones
Una normalización adecuada de todas las señales de control, permitirá vericar más
fácilmente el comportamiento del sistema ante cambios en sus entradas, ya sean perturbaciones o cambios en el valor deseado de alguna de las variables controladas. Por
lo que se recomienda, si se quiere aplicar este método en una aplicación real, estudiar
a fondo la forma en que se va a realizar la normalización.
Debido a que el debilitamiento de ujo aparece tras superar la velocidad de quiebre,
se puede pensar en una aplicación en donde se trabaje por debajo de esta velocidad,
para mantener siempre un ujo magnético constante, con lo cuál se tendrá un mejor
control de velocidad.
Se recomienda para trabajos futuros considerar un modelo dinámico del inversor, para
explorar los cambios que introduciría en la sintonía, los cuales no deben ser tan considerables, debido a que la dinámica del inversor es más rápida que las demás plantas
del sistema. Se debe considerar eso sí el ruido que agrega a las señales de control y
corregirlo por medio de ltros.
Bibliografía
Alfaro, V. (2011). Método de identicación de modelos de orden reducido de tres puntos
123c. Departamento de Automática, Escuela de ingeniería Eléctrica, Universidad de
Costa Rica, 1:7.
Alfaro, V., Vilanova, R., and Arrieta, O. (2008). Analytical robust tuning of pi controllers for rst-order-plus-dead-time processes. 13th IEEE International Conference
on Emerging Technologies and Factory Automation (ETFA 2008), 1:18.
Chapman, J. S. (2000). Máquinas Eléctricas. Mc GrawHill.
Iqbal, H. (2003). Electric and Hybrid Vahicles Design Fundamentals. CRC Press.
Kazierkowski, M., Krishnan, R., and Blaabjerg, F. (2002). Control in Power Electronics. Academic Press.
Loría, G. A. (2008). Fundamentos Teóricos Para el Modelado y Análisis de Procesos
y Sistemas, Teoría del curso IE-409. Escuela de Ingeniería Eléctrica Universidad de
Costa Rica.
Phung, N. and Dittrich, J. (2008). Vector Control of Three-Pase AC Machines. Springer.
37
Apéndice A
Ecuaciones de sintonía, usando el
método ART2
Un resumen de las ecuaciones de sintonía, usando el método ART2 se muestra a continuación:
Generalidades: σ = 1 −
Lm 2
Lr Ls
Tσ =
σLr Ls
Lr Rs +Ls Rr −σLs Rr +1
Controladores de corriente del estator (iq , id ):
Tid = Tσ τd (2 − τd )
Kcd =
2−τd σLs
τd T σ
βd,q =
Tiq = Tσ τq (2 − τq )
Kcq =
2−τq σLs
τq Tσ
1
2−τd,q
Controlador de ujo (Cf ):
Lr
Tif = R
+
τ
T
τf (2 − τf )
d
σ
r
kcf =
2−τf
Lm τf
βf =
1
2−τf
Controlador de Par (Cp ):
Tip = Tσ τp (2 − τp )
kcp =
2−τp
8Lr
τp 3Lm 2 Ppo
Controlador de velocidad (Cv ):
2J
Tiv = zp H + τp Tσ τv (2 − τv )
kcv =
38
βp = 1
zp (2−τv )
τv
βv =
1
2−τv
Apéndice B
Ecuaciones de sintonía, usando la
síntesis del servo control
Generalidades: σ = 1 −
Lm 2
Lr Ls
Tσ =
σLr Ls
Lr Rs +Ls Rr −σLs Rr +1
Controladores de corriente del estator (iq , id ):
Tid = Tσ
Kcd =
1 σLs
τd Tσ
Tiq = Tσ
Kcq =
1 σLs
τq Tσ
Controlador de ujo (Cf ):
Lr
Tif = R
+
τ
T
kcf =
d σ
r
1
Lm τf
Controlador de Par (Cp ):
Tip = Tσ
kcp =
1
8Lr
τp 3Lm 2 Ppo
Controlador de velocidad (Cv ):
Tiv = z2J
+
τ
T
kcv = zτvp
p σ
pH
39