Ejercicio L.deI. de Momento Flexor en Tramo por MI
Anuncio

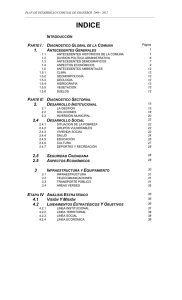
EJEMPLO LINEA DE INFLUENCIA DEL MOMENTO FLEXOR EN EL TRAMO CENTRAL DE VIGA CONTINUA CON EXTREMO IZQUIERDO EMPOTRADO, PARA CARGAS VERTICALES , CÁLCULO ANALÍTICO POR METODO MIC: A) Cálculo Analítico por Método MIC (Procedimiento de Cálculo) Resolvemos el problema a través de la solución de la ecuación matricial de Equilibrio (matriz de Rigidez): Unidades homogeneas KN, m L := 3 (m) IPN 160 J := 0.00000935 (m4) E := 210000000 3 E⋅ J = 1.963 × 10 (KN/m2 ) (KN.m2 ) Cálculo de rigideces en la dirección de las Incógnitas Cionemáticas: r11 := 8⋅ E⋅ J 3 = 5.236 × 10 L r22 := 7⋅ E⋅ J 3 = 4.582 × 10 L B) Esquemas de Superposición: r21 := 2⋅ E⋅ J 3 = 1.309 × 10 L r12 := r21 Determninación de las reacciones de vínculo en el fundamental para el esquema de cedimiento de vínculo correspondiente a un giro relativo -1: Vecto [R0] θi := 0 θd := 0 Given θd − θi = −1 E⋅ J L 2 ⋅ θi + E⋅ J ⋅ θd = 0 L 2 θi := 0.5 M10i := E⋅ J L 2 ⎛ 0.5 ⎞ ⎟ ⎝ −0.5 ⎠ Find ( θi , θd) = ⎜ θd := −0.5 M10d := E⋅ ⋅ θi = 654.5 M10d + M10i = 0 J L 2 ⋅ θd = −654.5 r01 := −M10i = −654.5 r02 := −M10d = 654.5 ⎛ r01 ⎞ ⎛ −654.5 ⎞ R0 := ⎜ ⎟=⎜ ⎟ ⎝ r02 ⎠ ⎝ 654.5 ⎠ 3 3 ⎛ r11 r12 ⎞ ⎛⎜ 5.236 × 10 1.309 × 10 ⎞⎟ R := ⎜ ⎟= ⎝ r21 r22 ⎠ ⎜⎝ 1.309 × 103 4.582 × 103 ⎟⎠ Por ser la ecuación de X1 independiente de X2 y X3 X1=X10 ⎛ X1 ⎞ ⎟ ⎝ X2 ⎠ X= ⎜ X := −R R⋅ X + R0 = 0 −1 ⎛ 0.173 ⎞ ⎟ ⎝ −0.192 ⎠ ⋅ R0 = ⎜ X1 := 0.173 X2 := −0.192 En el Cálculo de la superposición de elásticas (Principio de Superposición de Efectos), en el fundamental debido a la causa deformante cedimniento de vínculo mas las debidas a las Incognitas Cinemáticas nos basamos en los resultados de las elásticas de BARRAS ELEMENTALES OBTENIDAS POR INTEGRACIÓN DE LA ECUACIÓN DIFERENCIAL DE LA LINEA ELÁSTICA DE LA BARRA RECTA, CORRESPONDIENTES A CEDIMIENTOS DE VÍNCULO SEGÚN LAS INCOGNITAS CINEMÁTICAS. (Tablas) Para identificar las elásticas de cada tramo usamos el primer subindice para indicar el sistema (deformaciones en el fundamental debido a causas y/o incógnitas), y el segundo para indicar el tramo. Por otro lado cuando representemos la L de I total podemos referirla a un sistema de ejes con origen movil es decir trasladamos el origen según convenga en función de las ecuaciones analiticas de las elásticas elementales ya resueltas para barras simples. (tablas) Ver las correspondiente soluciónes desarrolladas de los casos que se presentan en este ejemplo y que son vigas simples E_E para giros extremos θ=+1 según corresponda. Ver archivo de Elásticas. (Agregar si falta alguna). Elásticas a Utilizar en la resolución: M=1 en el extremo libre barra : E-L 2 x v ( x) := 2⋅ E⋅ J θi=+1 en el apoyo izquierdo sentido horario: E-E v ( x) := x⋅ ⎛⎜ 1 − ⎝ x⎞ ⎟ L⎠ 2 θd=+1 en el apoyo derecho sentido horario: E-E 2 x ⎛x ⎞ v ( x) := ⋅ ⎜ − 1⎟ L ⎝L ⎠ θi=-1 en el apoyo izquierdo sentido antihorario: E-E ⎡ v ( x) := −⎢x⋅ ⎛⎜ 1 − ⎣ ⎝ 2 x⎞ ⎤ ⎟⎥ L⎠ ⎦ θd=+1 en el apoyo derecho sentido horario: A-E v ( x) := − ( L − x) 2⋅ L 2 3 2 + 3⋅ ( L − x) −L+x 2⋅ L θi=+1 en el apoyo izquierdo sentido horario: E-A 2 ⎛⎜ x3 ⎟⎞ x v ( x) := − 3⋅ +x ⎜ 2⋅ L2 ⎟ 2⋅ L ⎝ ⎠ A partir del segundo tramo, se traslada el origen de coordenadas a L, 2L Las elásticas correspondientes a los diferentes estados y tramos son: SISTEMA 0: Multiplicamos las elástica por el momento (rigidez x desplazamiento) Tramo1(0-L) Tramo2 (L-3/2L) Tramo2 (3/2L-2L) 2 ( x − L) ⋅ M10i v02i ( x) := 2⋅ E⋅ J v01 ( x) := 0 Tramo3(2L-3L) 2 ( 2⋅ L − x) ⋅ ( −M10d) v02d ( x) := 2⋅ E⋅ J v03 ( x) := 0 SISTEMA 1: Tramo2 Tramo1 Tramo3 2 x ⎛x ⎞ v11 ( x) := ⋅ ⎜ − 1⎟ L ⎝L ⎠ 2 ( x − L) ⎤ ⎡ v12 ( x) := ( x − L) ⋅ ⎢1 − ⎥ L ⎦ ⎣ SISTEMA2: 2 v21 ( x) := 0 ( x − L) ⎡ ( x − L) ⎤ v22 ( x) := ⋅⎢ − 1⎥ L ⎣ L ⎦ 2 ⎡⎢ ( x − 2⋅ L) 3 ⎥⎤ ( x − 2⋅ L) v23 ( x) := − 3⋅ + ( x − 2⋅ L) ⎢ 2⋅ L2 ⎥ 2⋅ L ⎣ ⎦ Linea de Influencia en intervalos: 0-L (tramo 1) v1 ( x) := v01 ( x) + v11 ( x) ⋅ X1 + v21 ( x) ⋅ X2 Linea de Influencia en intervalos: L-3/2L (tramo 2i) v2i ( x) := v02i ( x) + v12 ( x) ⋅ X1 + v22 ( x) ⋅ X2 Linea de Influencia en intervalos: 3/2L-2L (tramo 2d) v2d ( x) := v02d ( x) + v12 ( x) ⋅ X1 + v22 ( x) ⋅ X2 Linea de Influencia en intervalos: 2L-3L (tramo 3) v3 ( x) := v03 ( x) + v13 ( x) ⋅ X1 + v23 ( x) ⋅ X2 v13 ( x) := 0 Grafica completa de la Linea de Influencia del Esfuerzo MD para cargas verticales: v ( x) := 0 if 0 < x EjeViga := 0 Eje de Viga: v1 ( x) if 0 ≤ x ≤ L v2i ( x) if L ≤ x ≤ v2d ( x) if 3 ⋅L 2 3 ⋅ L ≤ x ≤ 2⋅ L 2 v3 ( x) if 2⋅ L ≤ x ≤ 3⋅ L − 0.2 2⋅ L L − 0.115 v ( x) EjeViga 0.2 0.51 0.6 0 2 4 6 8 x Tabla de Coeficientes de Influencia para distintos valores de abcisas (m): v ( 0) = 0 v ( 3.25) = 0.05 −3 v ( 0.25) = −3.304 × 10 v ( 3.50) = 0.115 v ( 0.50) = −0.012 v ( 3.75) = 0.194 v ( 0.75) = −0.024 v ( 4) = 0.286 v ( 1) = −0.038 v ( 4.199) = 0.37 v ( 4.20) = 0.37 v ( 1.25) = −0.053 v ( 4.25) = 0.392 v ( 1.50) = −0.065 v ( 1.75) = −0.074 v ( 2) = −0.077 v ( 2.25) = −0.073 v ( 2.50) = −0.06 v ( 2.75) = −0.036 v ( 3) = 0 v ( 4.50) = 0.512 v ( 4.75) = 0.395 v ( 5) = 0.29 v ( 5.25) = 0.199 v ( 5.50) = 0.12 v ( 5.75) = 0.054 v ( 6) = 0 v ( 6.25) = −0.042 v ( 6.50) = −0.073 v ( 6.75) = −0.095 v ( 7) = −0.107 v ( 7.25) = −0.111 v ( 7.50) = −0.108 v ( 7.75) = −0.099 v ( 8) = −0.085 v ( 8.25) = −0.068 v ( 8.50) = −0.047 v ( 8.75) = −0.024 v ( 9) = 0 Ejercicio3: puntoa) para p= 30 KN/m Momento Flexor en B p := 30 Máximo Positivo: 3 ⌠2 ⎮ MB := p⋅ ⎮ ⌡L ⋅L 2⋅ L ⌠ v2i ( x) dx + p⋅ ⎮ ⎮ ⌡3 2 v2d ( x) dx = 19.462 ⋅L Máximo Negativo: L 3⋅ L ⌠ ⌠ MB := p⋅ ⎮ v1 ( x) dx + p⋅ ⎮ v3 ( x) dx = −10.372 ⌡0 ⌡2⋅ L