UN SISTEMA INSTRUCCIONAL ASISTIDO POR
Anuncio

IV Congresso RIBIE, Brasilia 1998
UN SISTEMA INSTRUCCIONAL ASISTIDO POR COMPUTADORA
PARAEL ENTRENAMIENTO DE LA COORDINACIÓN VISO-MOTRIZ
autor: carlos enrique zerpa garcía
componente docente, área de educación
universidad nacional abierta
caracas, venezuela
telefax: (58-02) 577-5078
DEFINICIÓN DEL PROBLEMA
1) Un marco referencial.
La práctica de la enseñanza en el contexto de la educación
especial en Venezuela, dadas las actuales condiciones económicas, ha
generado un gran número de problemas a todas las instituciones que
ofrecen asistencia psicopedagógica a los niños y adolescentes que
presentan trastornos en el aprendizaje, entre otros. La consecuencia
directa de estos hechos es que se ha descuidado el objetivo de la
institucionalización de esta población de estudiantes en tales centros de
enseñanza, observándose que la escasez de recursos económicos y
materiales ha llevado muchas veces a "improvisar" tratamientos
psicoeducativos insuficientemente justificados, que se administran,
apenas considerando las necesidades individuales de cada sujeto y
continuándose tales intervenciones sin una evaluación seria de su
pertinencia, o bien, de su efectividad, por lo que se suelen aplicar
mecánicamente y sin mayor reflexión.
El caso que interesa señalar corresponde a lo que ha sido la
intervención sobre lo que comúnmente los psicólogos denominan
"coordinación viso-motriz"; la mayoría de los niños que acuden a estas
instituciones frecuentemente en su desarrollo han venido arrastrando
dificultades para el adecuado control del movimiento coordinado ojomano, circunstancia por la cual se le hace problemático a un niño de edad
escolar la realización de cierto tipo de conductas que se requieren
previamente para la adquisición de la lectura y la escritura: así tenemos
que los niños afectados por incoordinación viso-motriz suelen presentar
errores característicos en pruebas estandarizadas que teóricamente
estiman el grado de evolución de dicha destreza, como el test gestáltico
viso-motor de Lauretta Bender, sistema de corrección de Elizabeth M.
Koppitz (1989) el cual permite identificar fallas en la integración de
figuras, número correcto de elementos dibujados, problemas con la
orientación de las figuras dibujadas, inclusión de angulaciones
inexistentes en el patrón original y otras distorsiones de forma que, a
través de la evaluación de la reproducción gráfica del sujeto identificando
sus errores, permite la asignación de una edad de maduración
neurológica que servirá de patrón para establecer la existencia o no de
inmadurez en el desarrollo viso-motor y lo cual evidenciaría problemas de
coordinación ojo-mano; algo similar puede decirse del método de
evaluación de Marianne Frostig (Frostig y Lefever,1966), el cual somete al
niño a un conjunto de tareas de ejecución con papel y lápiz que, de
acuerdo al número de errores cometidos durante el trazado de líneas en
diferentes direcciones y bajo diferentes condiciones, según la tarea, se le
asignará igualmente un puntaje de desarrollo de la coordinación visomotriz. Comúnmente las decisiones que se toman una vez realizadas las
evaluaciones a los sujetos son de dos órdenes: 1) sugerir de inmediato
una evaluación neurológica completa por parte de un especialista, para
después dejar el problema en manos de un tratamiento de corte
farmacológico, ó 2) sugerir un programa de entrenamiento para ayudar al
niño en la adquisición de la destreza en cuestión, es decir, la coordinación
viso-motriz.
Si se detalla en qué consisten tales intervenciones las conclusiones
son sencillamente alarmantes; en una investigación realizada a través de
entrevistas a docentes y la revisión de los historiales de más de 40
alumnos cursantes regulares de educación especial en dos institutos de
enseñanza básica, se encontraron varios datos de interés (Zerpa, 1996):
a) quizás el mas grave es el hecho de que los docentes encargados de la
administración del tratamiento desconocían sus fundamentos teóricos y
normalmente lo hacían en forma casi rutinaria; es decir, por lo general los
ejercicios viso-motrices formaban parte de los ejercicios denominados "de
atención" confundiendo la finalidad de dos tipos de intervenciones que se
combinaban en una sola (ejercicios para mejorar el nivel de atención junto
a ejercicios viso-motrices); b) algunos docentes incluían un segmento
temporal durante la semana para hacer ejercicios de "psicomotricidad
fina" que combinaba arbitrariamente ejercicios motrices de toda índole
(rasgar, recortar, trazar líneas, rellenar, colorear); sin embargo los
docentes no sabían justificar por qué se hacia de esa forma: c) los niños
sometidos a estos "tratamientos" y sobre todos los de mayor edad (8-9
años) no manifestaban mayor interés en la realización de las actividades,
por lo cual se supone que la motivación hacia la tarea era realmente
escasa, influyendo mas bien el factor represivo para su conclusión ( p. ej.:
"es necesario terminar el trabajo para salir al recreo"); d) el tipo de
ejercicios fomentaba la ejecución no-reflexiva sobre los mismos; es decir,
a los niños se les pide un producto (p. ej.: realizar una línea lo mas recta
posible en una hoja de papel) y la consecuencia de hacerlo será la
aprobación o reprobación por parte del docente; esto indica que el
paradigma de trabajo es estrictamente conductual al restarse importancia
al proceso por el cual el niño es capaz de realizar la tarea ni considerar el
análisis cognitivo de los errores que comete; e) las actividades realmente
llamaban poco la atención y el interés de los niños ya que se les observó
frecuentemente distraídos y acelerando su actividad solo hacia el final de
la hora de trabajo, quizás debido a sus consecuencias; f) la mayoría de
los niños que tenían ya varios años de intervención con este tipo de
tratamiento continuaban presentando dificultades en la coordinación pese
al tiempo transcurrido (p. ej.: muchos niños que habían ingresado en los
niveles de apresto o preescolar seguían presentando problemas de
coordinación en tercer grado, unos cinco años después); g) la evolución
observada en las ejecuciones de los tests como el Bender-Koppitz
mostraba un avance muy lento en lo que es la disminución del número o
frecuencia de errores en la reproducción de figuras, encontrándose
incluso oscilaciones en el rendimiento desde una disminución progresiva
hasta retrocesos significativos en las reproducciones. Un detalle
importante es que muchos de estos niños han recibido durante un tiempo
prolongado tratamiento psico-farmacológico por neurólogos y otros
especialistas.
Una evaluación, poco profunda incluso, deja ver que la manera en
que tradicionalmente se ha abordado el problema de la coordinación viso-
motriz en las instituciones de educación especial adolece de severas
deficiencias, bien sea si se considera su conceptualización (generalmente
un programa de ejercicios de corte conductual que no forma parte de un
verdadero diseño de instrucción), o si se considera su implementación
(tareas repetitivas, poco motivantes para el aprendiz e inadecuadamente
estructuradas), por lo cual se hace necesario modificar este poco efectivo
enfoque de intervención.
Una visión alternativa del problema está en la consideración que, a
partir de los trabajos de Bernstein (Turvey,1990; Sporns y Edelman,
1993), se ha hecho en la compleja área de la biomecánica; en este
contexto, se tiene que las proposiciones tradicionales acerca del control
motor cambiaron cuando en 1967 el psicólogo ruso Nikolai
Aleksandrovich Bernstein planteó que la coordinación motora era el
proceso de dominio de redundantes grados de libertad del movimiento de
un órgano, es decir, su conversión a un sistema controlable (Sporns y
Edelman, 1993). Quizás esta propuesta aparece tardíamente en la
psicología evolutiva debido a que solo después de la muerte de Bernstein,
en 1966, fué cuando la censura existente en la ex-Unión Soviética
permitió la publicación en ingles de su obra "Co-ordination and Regulation
of Movements". Las investigaciones de Bernstein plantean así un cambio
en la biomecánica existente hasta entonces, sugiriendo que los patrones
de movimiento emergen a través de interacciones dinámicas y simbióticas
entre el organismo y el ambiente, es decir, las formas de movimiento no
son impuestas al organismo por un cerebro que madura autónomamente
sino que ocurre una mediación con el sistema neuromuscular vía
interacciones con la retroalimentación externa; evidentemente, no solo un
problema de orden neurológico, sino también de aprendizaje. La
regulación del movimiento es un proceso dinámico en el cual estrategias
adaptativas y funcionales (sinergias) son desarrolladas para reducir la
complejidad del control motor. En la perspectiva de Bernstein, el
desarrollo del control motor del niño es visto como un proceso dinámico
en el cual se forman sinergias funcionales en un contexto de ambiente
cambiante y fuerzas internas para simplificar el control reduciendo el
número de parámetros (grados de libertad) necesarios para ser
coordinados (Zernicke y Schneider, 1993). Un grado de libertad puede ser
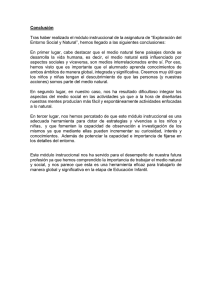
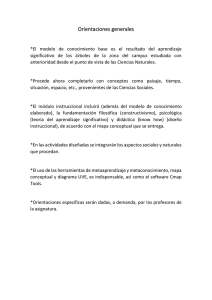
descrito en función de dos parámetros o estados: posición y velocidad;
tales parámetros constituyen lo que en la física de los sistemas biológicos
y en la dinámica no-lineal se denomina un "espacio de estados";
operacionalmente dicho concepto consiste esencialmente en un gráfico
cartesiano en el cual cada eje esta asociado con una de tales variables
dinámicas; así, cada punto del espacio de estados representa el estado
del movimiento en un momento dado, al ir evolucionando el sistema, va
pasando en el espacio de estados de unos puntos a otros, describiendo
una línea que se denomina trayectoria, que es la representación del
sistema dinámico (Ditto y Pecora, 1993) (ver Fig. 1).
velocidad
posición
Figura 1: Representación del “espacio de estados” de un movimiento
Ésta referencia sirve como punto de partida para indicar que, el
problema de Bernstein (la coordinación del acto motor como disminución
de los grados de libertad del movimiento) puede encontrar una respuesta
plausible si el mismo se aborda desde las nociones que aporta la
dinámica de sistema no-lineales; y es que el control del sistema motor,
como sistema natural, necesariamente sigue un comportamiento mas
caótico que lineal, hasta que emerge su organización.
Como se observa, existen contribuciones contemporáneas al
análisis de sistemas complejos que obligan a un replanteamiento al
problema que aquí se considera: cada uno y cualquier movimiento incluye
un espacio de estados de muchas dimensiones: el problema de la
coordinación es el de reducir un espacio de estados altamente
dimensional en uno de muy pocas dimensiones (Turvey, 1990), lo cual
tiene consecuencias importantes a la hora de querer hacer un
replanteamiento de los programas de intervención que hasta ahora han
servido quizá solo como ensayo experimental para la rehabilitación en
educación especial.
Desde la dinámica no lineal puede decirse que las actividades
coordinadas son esencialmente patrones desplegados en forma nomonotónica en el tiempo y son analizables, en principio, como una suma
de contribuciones periódicas. Estos hechos se combinan para hacer del
movimiento periódico la base para cualquier teoría construida para dar
cuenta de los patrones de coordinación. Así, mas que pensar acerca del
acto de la coordinación como una cosa hecha de cosas (en el sentido de
hacer segmentaciones de sus componentes), puede pensarse en ella
como una relación analizable en términos de relaciones: el movimiento
está compuesto de un pequeño repertorio de relaciones entre
propiedades, lo cual puede involucrar un gran número de segmentos del
cuerpo de diferente tipo. En este punto se plantea la pregunta : ¿cuál es
el papel que el sistema cognitivo puede tener en todo este proceso?: para
responder a ello, puede que sea conveniente asumir que se requiere de
un modelo de aprendizaje para dar cuenta del cómo el sujeto puede
"aprender" a controlar un sistema complejo (como el control ojo-mano) si
se sabe que es un sistema de naturaleza no-lineal, una respuesta posible
es que la procedimentalización del conocimiento fáctico que el sujeto
puede tener sobre su propia actividad motora puede generar que un
comportamiento inicialmente caótico siga uno de los muchos
comportamientos regulares de los que consta, entendiendo que la
conducta de un sistema caótico es la agregación de muchas conductas
ordenadas, ninguna de las cuales prevalece en circunstancias ordinarias
(Ditto y Pecora, 1993), con lo cual pudiera diseñarse un programa de
rehabilitación que, al tomar en cuenta tales aspectos, sea capaz de
superar a los métodos hasta ahora empleados y fomentar la adquisición
de modelos mentales que permitan la ejecución de tareas motoras
vinculadas a las habilidades que son deseables que el niño presente en la
escuela; para este propósito la tecnología del computador puede proveer
la oportunidad de diseñar un medio instruccional de naturaleza interactiva,
altamente estimulador para el sujeto, que guíe de forma tutorial el proceso
por el cual se logre adiestrar a un niño en la adquisición del control del
movimiento ojo-mano. Un diseño instruccional de segunda generación
(Merrill, Li y Jones, 1991) puede ser construido para cumplir con tal
objetivo.
En vista de lo anterior, esta investigación pretende responder a las
preguntas: ¿un modelo de entrenamiento basado en el desarrollo de
sinergias que están relacionadas con las funciones cognoscitivas de
habilidades de coordinación viso-motora puede fomentar el desarrollo del
control del movimiento ojo-mano?; ¿puede tal método, diseñado
empleando un medio instruccional computarizado, superar en efectividad
a las intervenciones de papel y lápiz que comúnmente se emplean en los
programas de rehabilitación de la educación especial?;¿ puede diseñarse
un modelo de entrenamiento basado en el desarrollo del movimiento
periódico no-lineal de un sistema motor que sea efectivo para el
desarrollo de la coordinación viso-motora?
LA PROPUESTA INSTRUCCIONAL
1) Modelo de desarrollo del sistema instruccional.
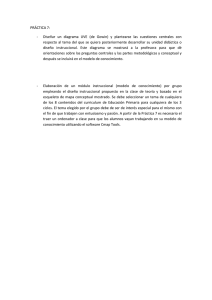
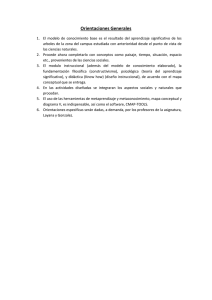
Para la realización de este proyecto se incluyen cuatro modelos
que sustentan el programa de entrenamiento viso-motriz; la figura 2.
resume en forma gráfica a dichos modelos:
(I) modelo del estudiante
(II)modelo pedagógico
programa de entrenamiento
para la coordinación
viso-motriz
(III) modelo teórico de la
(IV)modelo de aprendizaje
cordinación viso-motriz
Figura 2: Modelo para el desarrollo del sistema instruccional
I) Modelo del estudiante.
Incluye los aspectos de conocimientos previos, motivación e interés
para la tarea. El sistema instruccional, de corte tutorial, tendrá un
algoritmo de evaluación que permitirá conocer el nivel inicial y los
progresos que un sujeto particular tiene frente a la tarea (historia del
sujeto en el sistema, ejecución en la tarea seleccionada comparándola
con el experto).
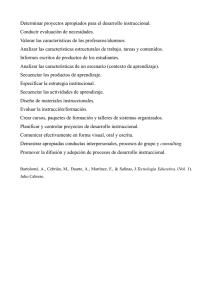
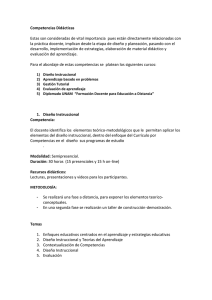
II) Modelo pedagógico.
Fundamentado en un diseño instruccional de segunda generación;
se corresponde concretamente al diseño de instrucción a emplear en el
desarrollo y presentación de las tareas de aprendizaje a los sujetos,
secuenciación, definición de la eficiencia y criterios de avance; la figura 3.
ilustra el diseño propuesto, en base a las consideraciones que plantean
Venezky y Osin (1991):
etapa 1:
planteamiento de los
objetivos
etapa 2:
establecimiento del
estado inicial del
aprendiz
análisis
etapa 3:
estructuración de
las condiciones para
el aprendizaje de las
tareas.
de
destrezas
estrategias
de experto
etapa 4: Valoración del
diseño
del
etapa 5:
etapa6:
estrategias instruccionales
organización
y tácticas
etapa 7:
diseño de lecciones
modelo adaptadas
a los niveles de
dificultad de las
tareas; avance
aprendizaje
curso.
etapa 8:
desarrollo y
evaluación
Figura 3: Etapas propuestas para el diseño de instrucción
III) Modelo teórico de la coordinación.
Fundamentado en las proposiciones originales de Bernstein ( hacia
1967) acerca del desarrollo de la coordinación del movimiento motor
(sinergias funcionales entre grupos musculares que permiten la reducción
de los grados de libertad del movimiento de los segmentos del cuerpo
implicados) y en una de las respuestas que ante dicho problema
proporciona Turvey (1990) en relación a la posibilidad de que el
movimiento motor del sujeto se comporte inicialmente como un sistema
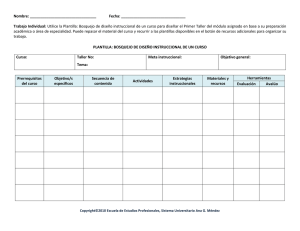
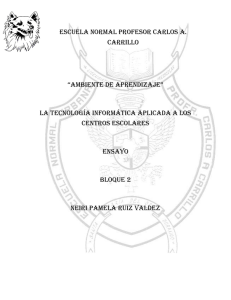
dinámico no-lineal: A partir de estas nociones, se desarrolla un programa
de ejercicios viso-motrices basados en el movimiento periódico de la
mano dominante del niño (el número del periodo varía en función del
número de veces que el sistema “gira” sobre si mismo para llegar a su
punto de partida; en este caso los ejercicios serán de periodo 1, 2 o 3
únicamente). La figura 4. ilustra un ejercicio tipo derivado de este marco
referencial:
p.b´
p.b
p.a
Figura 4: Ejercicio tipo, de movimiento periódico 1
p.a´
IV) Modelo de aprendizaje. Se propone la integración de dos modelos
derivados del procesamiento de la información para dar respuesta a la
pregunta ¿como se aprende con este sistema instruccional?; el modelo
integrado incluye el ACT de Anderson (1996) y el modelo de Atkins (1992
{Brown y Atkins, 1988} ), los cuales se complementan coherentemente y
pueden dar cuenta de la procedimentalización del conocimiento de
experto que presentará el programa en forma tutorial.; la figura 5.
describe (sincréticamente) el modelo de aprendizaje propuesto:
contexto de aprendizaje
motivación
percepción de si mismo
y de la tarea
DECLARACION
atención
DECLARATIVA
PROCEDURAL
n
percepción p
u
t
M. L. P.
M . C. P.
COMPILACION
AJUSTE
estilo de aprendizaje
estrategias
cognitivas
actuación
Figura 5: Modelo de aprendizaje
i
2) Sub-sistemas que contiene.
El sistema instruccional incluirá 3 susbsistemas principales, de
acuerdo a Venezky y Osin (1991), que integran a los modelos descritos
anteriormente, a saber:
Sub-sistema 1: facilidades instruccionales; resume el propósito general
del sistema; incluye proveer instrucción y la facilitación “en línea” del
aprendizaje del estudiante al contener los programas que van a
interactuar con el aprendiz.
Subsistema 2: facilidades de administración; almacena el registro del
estudiante en cuanto a su estado inicial al tomar el programa, lo cual
permitirá evaluar tanto al sujeto como a los propios materiales
instruccionales.
Subsitema 3: Biblioteca; incluye los ejercicios del programa, los cuales
varían en niveles de dificultad ( ejercicios de periodo 1, 2 ó 3) los cuales
se presentarán al estudiante presentando diversas formas que van desde
el uso de líneas guias, hasta rotaciones en la orientación del ejercicio o
del movimiento exigido de la mano.
3) Estructura del curso.
De naturaleza tutorial, permitirá dialogar con el estudiante y
modelará la forma correcta en que debe ejecutarse cada ejercicio o tipo
de ejercicio dada la procedimentalización del conocimiento declarativo
que proporcionará el mismo sistema al aprendiz. La estructura propuesta
es “de secuencia” (Venezky y Osin, 1991), donde cada nodo está referido
a un elemento particular del programa , el cual permite pasar al nodo
siguiente solo si se ha dominado razonablemente el nivel previo (basado
en un criterio de dominio seleccionado previamente en el diseño)
programa para la coordinación
viso-motriz
unidad 1
ejercicios iniciales
para el seguimiento
de instrucciones
unidad 2
ejercicios de
periodo 1
unidad 3
ejercicios de
periodo 2
Figura 6: Estructura general del curso
unidad 4
ejercicios de
periodo 3
REFERENCIAS
Anderson, J. R. (1996). ACT: A simple theory of complex cognition.
American Psychologist, 51, 355-365.
Atkins, M. J. (1992).Theories of learning and multimedia applications: an
overview. (mimeografiado).University of Newcastle upon Tyne,
School of Education, United Kingdom.
Ditto, W. L. y Pecora, L. M. (1993). Dominar el caos. Investigación y
Ciencia, 205, 48-55.
Frostig, M. y Lefever, W. (1966). Manual de administración y valoración
para el test del desarrollo de la percepción visual. Palo Alto:
Consulting Psychologist Press.
Koppitz, E. M. (1989 [1968]). El test gestáltico viso-motor para niños.
Buenos Aires: Guadalupe.
Merrill, M. D.; Li, Z. y Jones, M. K. (1990b). Second generation
instructional design (ID2). Educational Technology, February, 95105.
Sporns, O. y Edelman, G. M. (1993). Solving Bernstein's problem: a
proposal for development of coordinated movement by selection.
Child Development, 64, 960-981.
Turvey, M. T. (1990). Coordination. American Psychologist, 45, 938-953.
Venezky, R. y Osin, L. (1991). The intelligent design of computerassisted instruction. New York: Longman Publishing Group.
Zernicke, R. F. y Schneider, K. (1993). Biodinamics and Developmental
Neuromotor Control. Child Development, 64, 982-1004.
Zerpa, C. E. (1996). Análisis de entrevistas practicadas a docentes que
administran programas de rehabilitación perceptivo-motrices en
educación especial. Instituto Psicopedagógico "La Paz", Caracas.
Autor: Carlos Enrique Zerpa García
Licenciado en Psicología, Universidad Católica “Andrés Bello”,
Caracas.
Postgrado en Psicología Cognitiva, mención Desarrollo de
Habilidades Cognitivas, Universidad Católica “Andrés Bello”.
Profesor Instructor, Componente Docente, Área de Educación,
Universidad Nacional Abierta, Caracas.
Investigación en el uso de la tecnología del computador en
individuos discapacitados, informática educativa, autoconcepto,
comprensión de la lectura y neuropsicología cognitiva.