TEMA 12 (I) Depredación – Depredadores verdaderos
Anuncio
 Depredación – Depredadores verdaderos")
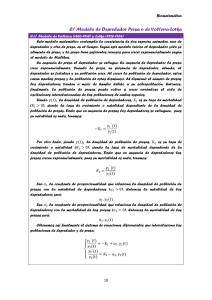
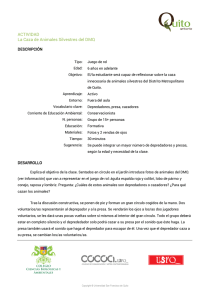
TEMA 12 (I) Depredación – Depredadores verdaderos 1. Introducción: tipos de depredadores y abundancia observada de depredadores y presas 2. Modelos (generaciones discretas) 3. Modelos (generaciones continuas) 3.1. Lotka-Volterra 3.2. Rosenzweig y MacArthur 3.3. Depredación "prudente" y rendimiento óptimo 4. Coevolución y amplitud de la dieta 4.1. Otras explicaciones para los grados de especialización 5. Permutaciones de la dieta 6. Respuestas funcionales de los depredadores existe una íntima asociación entre los parásitos y sus huéspedes1. 1. Introducción: tipos de depredadores y abundancia observada de depredadores y presas En temas anteriores hemos examinado posibles influencias sobre la regulación del tamaño poblacional de factores reguladores dependientes de la densidad; es decir, de la competencia intraespecífica e interespecífica. Ahora vamos a analizar otro tipo de interacciones interespecíficas que también puden tener importantes efectos reguladores: las interacciones que se establecen entre un depredador y su presa. ¿Qué entendemos por depredación? La depredación es el consumo de un organismo (la presa) por parte de otro organismo (el depredador), estando la presa viva cuando el depredador ataca por primera vez. (Nótese que esta definición no incluye a los detritívoros; otro tipo de consumidores que, a diferencia de los depredadores, se alimentan de materia orgánica muerta). Los depredadores pueden ser clasificados en tipos en función de las presas que consumen y de los efectos que producen en ellas (Begon y Mortimer 1986): 1. Depredadores verdaderos: son el grupo más típico de depredadores y se caracterizan por consumir otros animales, ganando así sustento para su propia supervivencia y reproducción. 2. Herbívoros: son animales que depredan sobre plantas (sobre sus hojas, semillas y/o frutos). A menudo las plantas no mueren como consecuencia de la acción de los herbívoros, aunque si pueden quedar dañadas. 3. Parásitos: sus ataques suelen ser nocivos pero rara vez letales a corto plazo, y están concentrados en uno o pocos individuos a lo largo de la vida del parásito. Por tanto 4. Parasitoides2: se trata de insectos (principalmente himenópteros, aunque también puede tratarse de dípteros) que depositan sus huevos dentro, sobre o cerca de otros insectos (aunque algunas especies utilizan arañas o cochinillas como huéspedes). El individuo parasitado suele hallarse en forma larvaria, aunque también puede estar en forma de huevo o pupa, o ser un adulto. Cuando el huevo depositado por el parasitoide eclosiona, la larva resultante comienza a crecer alimentándose de los tejidos de su hospedador y acaba matándolo. Las diferencias existentes entre estos cuatro tipos de depredación, en particular, sus distintos efectos sobre la supervivencia de las presas, deben ser tenidas en cuenta a la hora de modelizar las dinámicas de las poblaciones de depredadores y presas. La principal diferencia entre los depredadores verdaderos y los parásitos y parasitoides es que la actuación de los primeros elimina inmediatamente la presa consumida de la población de presas. La acción de parásitos y parasitoides muchas veces no implica la desaparición inmediata de la presa, aunque si que puede incrementar la probabilidad de que ésta muera por otras causas, o reducir su fecundidad. De otro lado, los herbívoros ocuparían una situación intermedia entre los depredadores verdaderos y los parásitos 1 Definición de huésped: (Diccionario enciclopedia Larouse): 1) Persona alojada en casa ajena. 2) Mesonero o amo de posada. 4) Persona que se hospeda en su casa a uno. 5) Bot. Zool. El vegetal o animal en cuyo cuerpo se aloja un parásito 2 Algunos autores estiman que el ∼25% de las especies que hay en el mundo son parasitoides. Esta cifra no es sorprendente cuando se considera la enorme cantidad de especies de insectos existente, que la mayoría sirven de huésped a al menos un parasitoide, y que incluso algunos parasitoides pueden servir de huéspedes a otros parasitoides (los llamados hiperparasitoides). 1 Figura 1. Patrones de abundancia en sistemas depredador/presa naturales. a, b) Oscilaciones acopladas; c, d) las presas se mantienen a un nivel bajo y constante; e) las presas exhiben explosiones poblac io nales periódicas; f, g) fluctuaciones aparentemente desconectadas. a) Lince canadiense y liebre americana. b) Una especie de avispa (Heterospilus prosopidis) y s u huésped el gorgojo del guisante (Callosobruchus chinensis). c) La especie de planta pericón (Hypericum perforatum) y el escarabajo (Chrysolina quadrigemina). d) Una especie de escarabajo (Laemophloeus minutus) parasitada por un protozoo (Mattesia dispora). e) Un insecto psíllido (Cardiaspina albitextura) y su depredador, una especie de mosca del género Syrphus. f) Ratones de campo y topillos rojo s depredados por el cárabo común. g) El ratón común (Mus musculus) y la planta Hordeum vulgare. (Modificado de Begon y Mortimer 1986). y parasitoides ya que pueden consumir plantas enteras y partes de plantas. Dicho de otro modo, desde el punto de vista de la planta que sufre su acción, los herbívoros pueden actuar como depredadores verdaderos y como parásitos. Los depredadores también pueden ser clasificados de acuerdo con la amplitud de su dieta en: 1. Monófagos: se alimentan de un único tipo de presa. 2. Oligófagos: se alimentan de unos pocos tipos de presa. 3. Polífagos: se alimentan de muchos tipos de presa. El grado de especialización de los depredadores puede tener importantes consecuencias sobre la dinámica de sistemas depredador-presa. Por ejemplo, la dinámica de un depredador monófago está probablemente muy asociada a la distribución y abundancia de su presa, mientras que resulta improbable que la abundancia de un depredador polífago esté condicionada por la dinámica de una sola de sus múltiples presas. Estos aspectos serán considerados en mayor profundidad más adelante. De momento, fijémonos en los patrones de abundancia de depredadores y presas que observamos en casos reales en la naturaleza (Figura 1). Quizás el tipo de relación más esperable a priori es el que muestran los casos a y b de esta figura. En éstos se observan oscilaciones acopladas, en las que el número de depredadores sigue al de sus presas (cuando el número de presas se incrementa, a continuación se produce un incremento del número de depredadores que es seguido a su vez por un descenso en el número de presas, y así sucesivamente). Pero hay también otros tipos de relaciones: en los casos c y d, el número de las presas es mantenido en un nivel bajo constante; en e, la presa manifiesta incrementos explosivos periódicos; en los casos f y g, depredador y presa muestran fluctuaciones aparentemente desconectadas. Está claro por tanto que las relaciones de abundancia entre depredadores (del tipo que sean) y sus presas pueden ser muy variadas. En muchas ocasiones, ello puede explicarse porque depredadores y presas no existen como sistemas simples de dos especies, luego, para entender sus relaciones, debemos considerarlos en un contexto multiespecífico realista. Pero esta no es la única razón como veremos a continuación. 2 2. Modelos (generaciones discretas) (Extraído de Krebs 1986: 278) De forma similar a como hicimos al inicio del Tema 10-2 (Competencia intraespecífica: Modelos de crecimiento geométrico y logístico), comencemos por examinar el supuesto de un sistema ideal depredador-presa, en el que ambas poblaciones tienen generaciones discretas y viven completamente aisladas (no interaccionan con otras poblaciones) en un hábitat idóneo para ellas. En estas circunstancias, la dinámica de las poblaciones estará completamente determinada por las interacciones que acontecen entre ellas. Podemos pensar, por ejemplo, que son una población de parasitoides y otra de hospedadores que viven en ambientes estacionales como el nuestro, en los que suelen mostrar una generación por año. Este sistema de relaciones puede describirse desarrollando la ecuación logística para sistemas discretos que ya conocemos, y que para el caso de la población de presas sería: Nt+1 = (1 - Bzt)Nt (1) Recuérdese que z = N -Neq, y que B es la pendiente de la recta que describe el efecto de la densidad sobre la tasa reproductora básica R0. En presencia del depredador añadiremos un término más que considere los individuos de la presa que son consumidos por los depredadores: Nt+1 = (1 - Bzt)Nt - CNtPt (2) donde C es una constante que mide la eficacia de cada depredador en la obtención de presas; y Pt el tamaño de la población de depredadores en el tiempo t. Para el caso de la población de depredadores supondremos que la tasa reproductiva depende del número de presas disponibles: Pt+1 = QNtPt Figura 2. Cuatro posibles resultados del modelo de poblaciones con generaciones discretas: (a) equilibrio estable sin oscilación; (b) oscilación divergente que conduce a la extinción del depredador o de la presa; (c) oscilación estable; y (d) oscilación convergente (las oscilaciones de ambas poblaciones van reduciendo su amplitud, hasta estabilizarse en torno a un valor). (3) donde Q es una constante que mide la eficiencia con que el depredador aprovecha la presa para producir descendencia. Nótese que si el tamaño de la población de presas N fuese constante, esta ecuación describiría un crecimiento geométrico para la población del depredador. A pesar de su sencillez, las ecuaciones (2) y (3) pueden generar cuatro resultados muy diferentes (Figura 2), de los cuales, solo uno corresponde a oscilaciones acopladas. Podemos concluir, por tanto, que estas oscilaciones son solo un tipo más de dinámica entre las que pueden ocurrir en los sistemas de depredador-presa (incluso aunque estos sistemas sean tan sencillos como el descrito por las ecuaciones 2 y 3). Debemos abandonar, por tanto, la idea preconcebida de la existencia de oscilaciones periódicas en los sistemas depredador-presa. 3. Modelos (generaciones continuas) 3.1. Lotka-Volterra Muchos depredadores y presas tienen generaciones que se solapan, con nacimientos y muertes que ocurren de forma continuada; los depredadores vertebrados suministran muchos ejemplos. Las ecuaciones de Lotka-Volterra también pueden ser utilizadas para describir la dinámica de poblaciones de depredadores y presas en estas condiciones. Supongamos una población de presas con crecimiento geométrico en ausencia de depredador: dN / dt = r1N (r1 es positivo) (4) donde r1 es la tasa instantánea de crecimiento de la población. En el caso del depredador supongamos que la población decrece de forma geométrica en ausencia de la presa: dP / dt = - r2P (5) donde P es la densidad de los depredadores y r2 representa la tasa instantánea de muerte del depredador en ausencia de la presa. Si el depredador y la presa se reúnen en un espacio limitado, r1 se verá disminuida por un factor que depende de la densidad de los depredadores: 3 Figura 3. Ciclos depredador-presa clásicos predichos por las ecuaciones de Lotka-Volterra con r1 = 1, ε = 0,1, r2 = 0,5, θ = 0,02. El tamaño inicial de la población de presa es 20, el del depredador 4. El punto de equilibrio es 25 presas y 10 depredadores (exraido de Krebs 1986). dN / dt = r1N - εPN (6) donde ε es una constante que mide la habilidad de la presa para escapar de los depredadores. Igualmente, la población del depredador se incrementará en una tasa que depende de la densidad de la población de la presa: dP / dt = - r2P + θNP (7) donde θ es una medida de la habilidad del depredador para capturar a la presa y convertirla en descendientes. El punto de equilibrio, en el que dN / dt = 0 y dP / dt = 0, viene dado por las densidades N = r2 /θ, y P = r1 /ε. Esto resulta de lo siguiente: si dP / dt = 0 , entonces: - r2P + θNP = 0 (8) ahora, si dividimos todo por P, tenemos que: - r2 + θN = 0 (9) y de aquí resulta que: N = r2 /θ Figura 4. Ciclos depredador-presa clásicos predichos por las ecuaciones de Lotka-Volterra con r1 = 1, ε =0,1, r2 = 0,5, θ = 0,02. La curva seguida por cualquier población particular depende del punto de partida (extraído de Krebs 1986). (10) Para obtener el valor de P en el punto de equilibrio, operaríamos de forma similar. Estas ecuaciones depredador-presa se caracterizan por una solución periódica consistente en que el tamaño de las poblaciones oscila de forma sistemática (Figura 3). La amplitud de las oscilaciones depende de las densidades de partida del depredador y de la presa. La Figura 4 ilustra esto haciendo abstracción del tiempo y representando la densidad de la presa en función de la densidad del depredador. Como puede verse en la figura, cualquier población continuará de forma indefinida siguiendo el camino cíclico en que comienza. Este modelo presupone el hecho (irreal en términos biológicos) de que hay una memoria de las condiciones ambientales iniciales, lo que significa que no habría fuerzas internas (v.g. dentro del propio sistema) que aproximen el sistema al punto en que el número de depredadores y presas no varía en el tiempo. Dicho de otro modo, cuando cualquiera de las dos poblaciones, la del depredador o la de la presa, es desplazada de su equilibrio, el sistema saldrá de su curva de oscilación, saltando a otra curva en la que permanecerá hasta que una nueva perturbación cambie la amplitud de las oscilaciones (Figura 4). Se dice que este es un equilibrio neutro (y a las oscilaciones se les denomina neutralmente-estables) porque no hay fuerzas internas capaces de aproximar el sistema al punto en que el número de depredadores y presas no varía en el tiempo (es decir, para situar las poblaciones en la intersección entre las isoclinas del depredador y de la presa). Las perturbaciones externas pueden modificar la amplitud de las oscilaciones, manteniéndose esta dinámica hasta que una perturbación particular genere oscilaciones en una de las dos poblaciones (la del depredador, o la de la presa) de amplitud tal que dicha población llegue a cortar el eje de coordenadas extinguiéndose. Esta propiedad por si sola ya sugiere que las ecuaciones de Lotka-Volterra simplifican enormemente lo que sucede en la naturaleza. Otra premisa irreal de este modelo es que el número de las presas halladas por cada depredador es una función lineal de la densidad de la presa sin límite superior, lo que significa que el apetito del depredador es potencialmente infinito, y que el tiempo gastado en manipular3 las presas no es importante. 3 Llamamos tiempo de manipulación, al tiempo gastado en capturar, someter y consumir la presa, más los tiempos refractarios como los que necesita un parasitoide para poder poner más huevos 4 Este modelo tan extremadamente simplista ha sido modificado por numerosos autores para hacerlo más realista. Por ejemplo, se han incluido tiempos de retardo en la respuesta de los depredadores a los cambios de densidad de la presa; efectos dependientes de la densidad en las poblaciones interactuantes; relaciones no lineales en las respuestas del depredador a los cambios de densidad de la población de la presa; y refugios para las presas. En relación con lo anterior, el mismo Lotka (1925, citado en Ricklefs 1990) sugirió que se podían simular los efectos dependientes de la densidad (la competencia) añadiendo términos de orden superior (cuadráticos, cúbicos, etc) a las ecuaciones diferenciales de las poblaciones de depredadores y presas. Por ejemplo, la ecuación que describe el crecimiento de las presas en presencia de depredadores: dN / dt = r1N - εPN (6) podría ser modificada añadiendo un término cuadrático del siguiente modo: dN / dt = r1N - εPN -bN2 donde b es una constante. La consecuencia sería crear un movimiento espiral hacia adentro de las trayectorias representadas en la Figura 4 que se dirigiría hacia el punto de equilibrio conjunto de las dos poblaciones. Finalmente, a pesar de su simplicidad, el resultado matemático que se obtiene de las ecuaciones de LotkaVolterra nos parece bastante esperable, y algunos sugirieron que debería ser fácil encontrar sistemas depredador-presa en la naturaleza que mostrasen las oscilaciones predichas por el modelo. Por ejemplo, en algún momento se postuló que las fluctuaciones que muestran las poblaciones del lince de Canadá y la liebre Americana se debían a interacciones que podrían ser simuladas con las ecuaciones de Lotka-Volterra, por ser este sistema aparentemente muy simple. Sin embargo, hay una observación que va en contra de esta conclusión: en la isla de Anticosti, las liebres fluctúan con un ciclo de 10 años en ausencia del lince. En realidad, hasta hoy, nadie ha encontrado evidencia firme de la existencia de una oscilación depredador-presa clásica en poblaciones silvestres. Hay muchas razones que permiten explicar el que esto sea así. Como decíamos al principio, una de las más importantes es que, frecuentemente, los depredadores pueden consumir más de un tipo de presa. 3.1. El modelo de Rosenzweig y MacArthur El modelo Rosenzweig y MacArthur (1963, citado en Pianka 1982) se explica a grosso modo como sigue: 1. En ausencia de depredadores, la densidad máxima de la población de equilibrio de la presa es K1, la capacidad de carga o portadora de la población (Figura 5). Figura 5. Forma hipotética de la isoclina de una presa (dN1 / dt = 0) representada respecto a las densidades de la presa y del depredador. Las poblaciones de la presa aumentan dentro de la región sombreada y disminuyen por encima de la línea que la rodea. A densidades intermedias, la presa presenta una tasa de renovación más alta y puede soportar una mayor densidad de depredadores sin que su población disminuya. 2. Es probable que exista cierto límite inferior para la densidad de la presa (representado por el punto donde la curva corta el eje de abscisas en la Figura 5), por debajo del cual los encuentros entre los individuos sean demasiado raros para asegurar la reproducción, y por consiguiente la población de la presa disminuya hasta extinguirse. 3. Análogamente, para cualquier densidad de la presa, debe existir una densidad máxima del depredador que se pueda mantener sin que suponga apenas ningún aumento o disminución de la población de la presa. Partiendo de los tres argumentos anteriores se puede trazar una isoclina de la presa (dN1 /dt = 0) en el plano (N1 , N2) (Figura 5) semejante a las isoclinas trazadas anteriormente en las figuras representativas del modelo básico de Lotka-Volterra. Siempre que la isoclina de la presa tenga un máximo único, la forma exacta de la curva no es importante para las conclusiones a extraer del modelo. Por encima de esta línea, las poblaciones de la presa disminuyen; por debajo de ella, aumentan. Consideremos a continuación la forma de la isoclina del depredador (dN2 /dt = 0): 1. Por debajo de cierta densidad umbral de la presa, los depredadores no pueden obtener suficiente alimento para autosubstituirse y la población del depredador deberá disminuir. 2. Por encima de esta densidad umbral de la presa, la población del depredador aumentará. después de una puesta, o los que necesita un depredador verdadero para que su tracto digestivo tenga capacidad para acoger más presa. 5 Figura. 6. Dos isoclinas hipotéticas del depredador. (a) Por debajo de cierta densidad umbral de la presa, X, los individuos depredadores no pueden capturar suficientes presas por unidad de tiempo para substituir se a sí mismos. A la izquierda de esta densidad umbral de la presa, las poblaciones del depredador disminuyen; a la derecha, aumentan siempre que estén por debajo de su propia capacidad de carga, K2 (es decir, dentro del área sombreada). Con tal de que los depredadores no interfieran uno en la eficacia del otro en la captura de la presa, la isoclina del depredador se eleva v erticalmente hasta la capacidad de carga del depredador, como in dica (a). (b) Si con altas densidades de depredadores la competencia reduce su eficacia en la obtención de alimento, la isoclina del depredador podría descender como muestra la curva (un efecto semejante podría ser desencadenado por el aumento del número de encuentros presadepredador si, como consecuencia, el aprendizaje de tácticas de huida de las presas es más rápido que el aprendizaje de tácticas de captura por parte de los depredadores). 3. Para simplificar, supongamos que no existe competencia entre los depredadores hasta que su población se encuentra en su capaciadad de carga (ver Figura 6a). (Nótese que si no hubiesemos la asunción de no competencia entre los depredadores, su isoclina se iría curbando hasta alcanzar la capacidad de carga; Figura 6b). Superpongamos ahora las isoclinas de la presa y del depreador en la Figura 7 y consideremos el comportamiento de las dos poblaciones en cada uno de los cuatro cuadrantes marcados como A, B, C y D en dicha figura. En el cuadrante A, ambas especies están aumentando; en B el depredador va en aumento y la presa disminuye; en C ambas especies disminuyen, y en D la presa aumenta y el depredador disminuye. Las flechas o vectores describen los cambios de densidad de las poblaciones. La magnitud relativa de los cambios de la densidad de las poblaciones de la presa y del depredador determina otra propiedad importante de este modelo que es la presencia o ausencia de un equilibrio estable para ambas especies. Este equilibrio se alcanza en un único punto en el plano (N1 , N2) que coincide con la intersección de las dos isoclinas (en donde dN1/dt y dN2 /dt son cero). Este modelo tiene tres posibles soluciones: los vectores forman una espiral hacia dentro (Figura 7a), una espiral hacia fuera (Figura 7b), o un círculo cerrado (Figura 7c). Estos tres casos corresponden, respectivamente, a oscilaciones amortiguadas, oscilaciones de amplitud creciente hasta alcanzar un ciclo límite, y oscilaciones de estabilidad neutra. En el caso de oscilaciones amortiguadas (Figura 7a) con el tiempo se alcanzará un valor de equilibrio en el cual las densidades de las poblaciones de la presa y del depredador se mantienen estacionarias. Este caso corresponde a un depredador que es relativamente ineficiente en la captura de presas (tanto que no puede empezar a explotar a su presa hasta que ésta está bastante cerca de su capacidad límite). Este tipo de oscilaciones también pueden resulta de la competencia entre depredadores produciendo una isoclina del depredador en pendiente (ver Figura 6a). Probablemente, el caso de las oscilaciones amortiguadas es el reflejo más real de lo que sucede en la naturaleza. Las oscilaciones de amplitud creciente (Figura 7b) corresponden a un depredador muy eficiente, que puede explotar a la población de la presa hasta casi llevarla a su escasez limitante (i. e. la escasez por debajo de la cual los encuentros entre los individuos son demasiado raros para asegurar la reproducción). Este depredador exterminará rápidamente a su presa, y se extinguirá él mismo, a menos que disponga de una presa alternativa. Dado que este sistema de interacciones conduce a la extinción de, al menos, alguna de las poblaciones es lógico que las oscilaciones crecientes no se observen en la naturaleza. Debido a las tácticas de huida de la presa respecto al depredador, muchos depredadores reales (o su mayoría) son con probabilidad relativamente ineficientes y tienden a capturar solo aquellas presas que están en demasía en la población de la presa (Errington, 1946, citado en Pianka 1982). Los individuos depredadores que se reproducen con éxito cuando la densidad de la presa es baja, normalmente vencerán y substituirán a los más ineficaces que requieren densidades más altas de la presa. La selección natural que 6 Figura 7. Superposición de las isoclinas de la presa y del depredador para evidenciar las relaciones de estabilidad. (a) Depred ador ineficaz que no puede explotar con éx it o a su presa hasta que la población de ésta está cerca de su capacidad límite. Los vectores forman una espiral dir igida hacia dentro, las oscilaciones poblacionales depredador-presa están amortiguadas y el sistema se desplaza hasta el punto de equilibrio estable conjunto (en el cual se cruzan las dos isoclinas). (b) Depredador muy eficaz, que puede explotar poblaciones muy escasas de la presa, casi en una situación de escasez limitante. Los vectores ahora forman una espiral dirigida hacia afuera y la amplitud de las oscilaciones de las poblaciones aumenta uniformemente hasta alcanzar un ciclo límite, que a menudo conduce a la extinción del depredador, o a la de la presa y el depredador. (c) Depredador moderadamente eficaz que puede empezar a explotar a su presa en una densidad intermedia. Los vectores ahora forman un círculo cerrado y las poblaciones de la presa y del depredador oscilan con el tiempo con una estabilidad neutra. [Según MacArthur y Connell (1966, citado en Pianka 1982)]. actúa sobre el depredador tiende a desplazar su isoclina hacia la izquierda. A esto se opone la selección que opera en favor de individuos-presa más capacitados para escapar, y que tiende desplazar la isoclina del depredador hacia la derecha (y posiblemente también a elevar la isoclina de la presa), aumentando la estabilidad del sistema. Por lo tanto, la selección natural que actúa sobre la población de la presa tiende a aumentar la estabilidad del sistema. En realidad, a menos que, en el desfase, la presa vaya por delante del depredador, cabe esperar que este último explote en exceso a su presa y conduzca a ambas poblaciones a la extinción. En las oscilaciones de estabilidad neutra (Figura 7c) las isoclinas del depredador cruza a la de la presa a densidades intermedias de ésta (es un depredador moderadamente eficaz) y los vectores resultantes forman un círculo cerrado. El resultado es que las poblaciones de la presa y del depredador oscilan con el tiempo como en el modelo básico de Lotka-Volterra. Nótese que el punto de cruce de ambas isoclinas, aún representando una densidad intermedia de presas, coindice con la mayor densidad de depredadores que se pueden mantener sin que la población de presa varíe. A este punto se le llama densidad de rendimiento óptimo de la población de presa, y coincide con la situación de máxima tasa de renovación de esta población. 3.3. Depredación «prudente» y rendimiento óptimo. Un depredador “inteligente” (v.g. prudente) debería explotar su presa de manera que maximice la tasa de renovación de ésta y, por tanto, su propio rendimiento. Este depredador mantendría la población de la presa en dicha densidad de rendimiento óptimo, ya que es la que proporcionara la máxima tasa de producción de nueva biomasa de la presa. El hombre dispone de la capacidad necesaria para ser este depredador prudente; en realidad, durante mucho tiempo, el rendimiento óptimo ha sido el objetivo de la gestión de las poblaciones explotadas en la biología de las pesquerías. Pero ¿son otros depredadores menos inteligentes capaces de maximizar el rendimiento de sus presas? Un depredador verdaderamente prudente debiera capturar preferentemente a las presas (más viejas) con bajas tasas de crecimiento y con valores reproductivos bajos (no dejan descendientes y por tanto no importa si son eficientes o no evitando la depredación; ver más abajo) y dejar libres a las 7 presas con tasas de crecimiento rápidas y valores reproductivos más altos . De este modo, con el tiempo y las generaciones de presas, éstas irían incrementando su productividad. Como sabemos los depredadores muchas veces capturan individuos maduros y decrépitos, que con frecuencia no son diestros en la huida. No obstante, existe un defecto potencial en esta interpretación de la depredación prudente, siempre que varios individuos depredadores se encuentren con las mismas presas. Por ejemplo, si las presas más jóvenes y apetecibles tienen menos experiencia y son más fáciles de capturar, un individuo depredador que las “engañara” y las comiera probablemente cedería más genes que los genotipos prudentes que no explotaron este suministro alimentario. A consecuencia de ello, la falta de prudencia quedaría incorporada en el pool génico y se extendería. Exactamente las mismas consideraciones son válidas para una especie competidora del depredador que es capaz de usar los individuos presa en cuestión; es decir, los jóvenes. Por consiguiente, solo cabe esperar que la prudencia se desarrolle en situaciones en que un depredador único hace uso exclusivo de una población presa. Algunos ejemplos pueden, posiblemente, encontrarse entre depredadores territoriales, que capturan sus presas dentro de un área determinada. Otra explicación, más probable incluso, de que se produzca la depredación prudente en la naturaleza radica en los mismos organismos de presa. La intensidad de la selección natural es directamente proporcional a la esperanza de dejar progenie futura (a esta esperanza se le llama valor reproductivo, y se hace mínima, o incluso nula en la vejez). Luego, los individuos de la población de presas dotados de altos valores reproductivos (principalmente jóvenes vigorosos en edad reproductora), y que además poseen mejores dotes de huida frente a los depredadores, son los que tienen mayor probabilidad de dejar descendencia y transmitir dichas dotes a generaciones futuras. Una vez que la esperanza de progenie futura ha disminuido hasta cero (en la vejez), aunque la capacidad de huida de algunos individuos fuese aun muy alta, la siguiente generación no se beneficiará de ello. Y no lo hará, porque aunque los depredadores se concentren en el resto de los viejos que son menos eficaces, los supervivientes no transmitirán con ventaja esa mayor capacidad de huida a la siguiente generación poque no se reproducirán. Es decir, no hay presión selectiva que favorezca la incorporación de genotipos eficaces en la huida en la vejez, de ahí que muchos casos de depredación prudente estén probablemente relacionados con el consumo de individuos viejos. Considerada de esta manera, la susceptibilidad de la presa frente a la depredación debería estar relacionada inversamente con su valor reproductivo4. 4. Coevolución y amplitud de la dieta de los depredadores Para entender los patrones de amplitud de dieta entre depredadores hay que empezar estableciendo dos principios básicos: 4 LECTURA RECOMENDADA: En el apartado 14.4 del libro de ecología de Krebs (1986) se dan más informaciones sobre la evolución de la prudencia y de otras estrategias en los depredadores. 1. Los depredadores escogen las presas más rentables. Si la selección natural funciona como pensamos que lo hace, este principio ha de ser cierto. La evolución favorece a los individuos más saludables y eficaces (alimentándose, creciendo y reproduciéndose) en unas circunstancias ambientales dadas. Como la salud y eficacia se incrementan aumentando la rentabilidad de la adquisición de comida, la evolución favorecerá a quienes escojan las presas más rentables (Figura 8). 2. Animales y plantas han evolucionado en respuesta a presiones selectivas originadas en parte por otros animales y plantas (coevolución). Por ejemplo, las modificaciones evolutivas que aumenten la eficacia del depredador, pueden crean presiones de selección sobre las presas que favorezcan a aquellos individuos que puedan defenderse, repeler, ocultarse o escapar mejor de los depredadores. Ello, a su vez, puede generar presiones selectivas sobre el depredador, promoviendo de nuevo su evolución. Está claro que ningún sistema depredador-presa puede ser entendido a menos que consideremos que, probablemente, sus protagonistas han coevolucionado. Y también está claro que ningún depredador puede ser capaz de consumir todos los tipos de presa posibles, aunque solo sea porque hay restricciones de diseño que impiden que ésto sea posible (p.e. el pico de los colibríes no les permite comer semillas; las musarañas no pueden comer lechuzas, es al revés; las comadrejas no pueden cazar elefantes). Pues bien, unida a estas restricciones de diseño, la coevolución proporciona una fuerza adicional que limita la amplitud de la dieta del depredador ya que cada especie de presa responde evolutivamente de una forma diferente a las presiones impuestas por sus depredadores, pero un depredador no puede coevolucionar en un amplio rango de direcciones simultáneamente. En consecuencia: los depredadores tienden a especializarse en mayor o menor grado, y cuanto más adaptado está un depredador para consumir una determinada especie de presa, menos probable es que se beneficie de explotar una dieta amplia (p. ej. debido a la íntima relación de los parásitos con sus huéspedes, los parásitos tenderán, evolutivamente, a especializarse en un único huésped). Existen muchos casos de depredadores monófagos completos, como la mosca Drosophila pachea que habita en el desierto de Sonora, EE.UU., y se alimenta únicamente de los tejidos podridos del cactus Senita. Ninguna otra especie de Drosophila puede hacerlo, ya que son envenenadas por sustancias tóxicas producidas por el cactus. De otro lado, D. pachea está tan ligada a Senita que necesita de algunos esteroles raros que solo son producidos por esta especie. Relaciones como ésta deben ser comunes en la naturaleza: muchas plantas producen compuestos químicos protectores, por lo que hay muchos herbívoros que se hacen especialistas. A pesar de esto muchos depredadores verdaderos y muchos herbívoros se alimentan sobre una gran variedad de presas. ¿Pero por qué unos depredadores presentan una dieta amplia y otros están especializados? Una explicación parcial es que, aunque hay una presión coevolutiva hacia la especialización del depredador, hay también una presión evolutiva contraria que desfavorece la especialización de los depredadores en presas con una dinámica impredecible o 8 Figura 8. (a) Esta especie de cangrejo de mar se alimenta preferentemente de mejillones del tamaño que le proporciona más rentabilidad energética (los mejillones escogidos con preferencia tienen entre 12 y 22 mm). (b) Esta especie de lavandera conc entra su alimentación sobre moscas que tienen una mejor relación entre su longitud (una medida del tamaño) y el redimiendo calórico que aportan por unidad de tiempo de manipulación (extraído de Begon y Mortimer 1986). muy explotadas. Dicho de otro modo, cuando los depredadores se alimentan en recursos impredecibles, hay una tendencia a que no sean especialistas. Por ejemplo, en el caso de D. pachera la especialización posiblemente está favorecida por la exclusividad de su recurso, y porque Senita debe proporcionar un recurso bastante estable. 4.1. Otras explicaciones para los grados de especialización Para obtener comida, cualquier depredador debe gastar tiempo y energía buscando su presa y manipulándola (persiguiéndola, sometiéndola y consumiéndola, inlcuyendo aquí la digestión). La búsqueda tenderá probablemente a estar orientada a encontrar un tipo particular de presas pero, mientras ocurre es probable que el depredador encuentre otras pesas potenciales. Teniendo esto en cuenta, MacArthur y Pianka (citado en Begon et al. 1995) utilizaron una nueva aproximación al concepto de dieta para entender la variabilidad de su amplitud: consideraron que dicha amplitud estaría determinada por las decisiones que toma el depredador una vez que ha encontrado su presa. Según esto podemos distinguir dos tipos de depredadores: 1. Los depredadores generalistas, que eligen perseguir (y con suerte dominar y consumir) una alta proporción de las presas que se cruzan en su camino. 2. Los depredadores especialistas, que continúan buscando hasta que encuentran una presa que pertenece a su tipo específico preferido. La selección natural favorecerá a los depredadores que escogen perseguir toda presa que encuentran si, durante el tiempo que lleva manipular esa presa, el depredador no puede esperar encontrar y manejar una presa más rentable. Esto significa que los depredadores que tienen un tiempo de manipulación corto de sus presas tenderán a hacerse generalistas, porque en el escaso tiempo que lleva manejar y consumir una presa que ya han encontrado, difícilmente pueden pretender empezar a buscar y encontrar otra presa más beneficiosa ("más vale pájaro en mano que ciento volando"). Como ejemplo, MacArthur y Pianka han utilizado estas ideas para explicar la elevada amplitud de dietas que presentan muchos pájaros insectívoros. Por contra, en el caso de depredadores que tienen un tiempo de búsqueda corto y un tiempo de manipulación comparativamente largo, la selección natural tendería a hacerles especialistas, porque los depredadores pueden esperar encontrar una presa rentable poco después de ignorar una presa que es menos rentable. Los leones, por ejemplo, viven casi constantemente tan próximos a sus presas, que durante mucho tiempo las están viendo en la distancia. Luego el tiempo de búsqueda es casi despreciable. Por el contrario, 9 el tiempo de manipulación, particularmente el que corresponde a la caza, puede ser bastante largo (y requiere además un consumo importante de energía). Por consiguiente, los leones son especialistas en el sentido de que se han especializado en presas que pueden ser perseguidas de forma más eficaz: inmaduros, débiles, tullidos y viejos. En resumen, podemos esperar que los depredadores manipuladores o perseguidores (p.e. leones) sean especialistas y que los buscadores (p.e. muchas aves insectívoras) sean más generalistas. 5. Permutaciones de la dieta Las preferencias de muchos consumidores son fijas, es decir, se mantienen independientemente de la disponibilidad (A) relativa de los tipos de alimento que están a su disposición (Figura 9a). No obstante, muchos consumidores polífagos permutan sus preferencias de modo que cada tipo de alimento es ingerido con una frecuencia desproporcionada cuando es abundante, y es ignorado también con una frecuencia desproporcionada cuando deja de ser abundante (Figura 9b, c). Lawton et al. (1974, citado en Begon et al. 1995) hicieron una interpretación interesante del tipo de respuesta mostrado en la Figura 9c; sugirieron que lo que ocurría es que cuanta más experiencia previa adquiere Notonecta de una especie, más probabilidades tiene de realizar un ataque exitoso. Dicho de otro modo, cuanto más abundante es una presa, más posibilidades tiene de formar parte de la dieta del depredador. Éste la va consumiendo y con ello va aprendiendo, (B) (C) Figura 9. (a) Ausencia de permutación en caracoles litorales Thais y Acanthina que consumen dos especies de mejillones: Mytillus edulis y M. calfornianus. Los caracoles siempre preferían más M. edulis, de concha más fina, menos protegida, cuando las proporciones de ambas especies de mejillones eran iguales (línea punteada). También mostraron esa misma preferencia cuando las proporciones de M. edulis eran más bajas que las de M. californianus; es decir, los caracoles siempre preferian alimentarse sobre los mejillones más vuln erables. (b y d) Permutación: los guppys (una especie de peces) podían elegir entre moscas del vinagre y gusanos tubicífidos (sus presas). Los gusanos fueron rechazados desproporcionadamente cuando su abundancia relativa era baja, y consumidos desproporcionadamente cuando su abundancia relativa era alta. Se produjo una permutación. (c) Permutación: el depredador es el chinche de agua Notonecta glauca, y las presas: el isópodo Asellus aquaticus, y las larvas de efímera Cloeon dipterum. Se evaluó la preferencia del depredador en distintas situaciones, pero manteniendo la densidad global de las presas. Notonecta consumió un número desproporcionadamente pequeño de Asellus (el isópodo) cuando estos eran escasos, y desproporcionadamente alto cuando eran abundantes (extraído de Begon et al. 1995). 10 mejorando su capacidad para cazarla; con ello llega un momento en que, como el depredador es más experto en esa presa, la consume más de lo que sería esperable si solo considerásemos su densidad. Tinbergen (1960, citado en Begon et al. 1995) y había sugerido que este comportamiento de aprendizaje podía ser bastante común en la naturaleza, sobre todo entre depredadores vertebrados. Estos desarrollarían una imagen (o estrategia) específica de búsqueda que les permitiría ser más eficaces encontrando sus presas. Esto tendría el resultado paralelo de que se concentrarían más en aquellas presas que más han contribuido a crear esa imagen. Como es probable que las presas más abundantes contribuyan más a crear esa imagen, los depredadores se concentrarían más en ellas mientras mantienen una abundancia alta, y permutarían a otra presa cuando la abundancia relativa de ésta última se incrementa. 6. Respuestas funcionales Ecuaciones como las de Lotka-Volterra omiten por completo muchas sutilezas importantes de la interacción depredadorpresa. Por ejemplo, Solomon (1949, citado en Pianka 1982: 194) distinguió algunos componentes de la manera en que los depredadores responden a los cambios de densidad de la presa. En primer lugar, los individuos depredadores capturan y comen más presas por unidad de tiempo a medida que la densidad de presas se incrementa, pero solo hasta que se llega a cierto umbral de saciedad por encima del cual el número de presas capturadas por depredador es más o menos constante. Solomon utilizó la expresión respuesta funcional para referirse a la relación entre la tasa de consumo de un depredador y la densidad de su alimento (presas). Se han descrito tres tipos de respuestas funcionales, que representan formas "puras" entre una serie o continuo de posibilidades (ver más abajo). Obsérvese que la respuesta funcional de un depredador permite la regulación de la densidad de la presa sin un aumento del número de depredadores. Figura 10. Respuesta funcional de Tipo 2. Babosas que se alimentan de la gramínea Lolium perenne (extraído de Begon y Mortimer 1986: 118) precisamente por el número máximo de tiempos de manipulación que encajan en el tiempo total disponible. La edad del depredador también es importante: cuanto más joven e inexperto es el depredador, más pronto se alcanza la asíntota (el máximo). Luego la forma tomada por la respuesta funcional Tipo 2 depende tanto del tiempo de manipulación como de la eficiencia de búsqueda o, lo que es lo mismo, de la tasa de ataque (los más jóvenes la tienen más baja). Interpretaciones alternativas o complementarias al tiempo de manipulación de las respuestas funcionales de tipo 2 invocan la "confusión" del depredador cuando hay un exceso de presa, o a la concentración de la depredación que se haría en estas condiciones en un número menor de presas pero de más calidad. 6.2. La respuesta funcional de Tipo 1 Es más rara que la respuesta funcional del tipo 2 y es en realidad un tipo extremo de ésta (ver Figura 11). 6.1. La respuesta funcional de Tipo 2 Es la más frecuente, en particular en sistemas herbívoroplanta, depredador-presa y parasitoide- huésped. La tasa de consumo se incrementa con la densidad de la presa de una forma asintótica. Hay un momento en que la tasa de consumo ya no se incrementa aunque lo haga la densidad de la presa (Figura 115). Nótese que este es un caso de dependencia negativa de la densidad: a mayor cantidad de presa menor es la depredación relativa que ésta sufre. Holling (1959, citado en Begon et al. 1995) interpreta esta respuesta Tipo 2 de la siguiente forma: a medida que se incrementa la densidad de la presa, el tiempo de búsqueda se convierte en trivial y comienza a hacerse más y más importante el tiempo de manipulación. A altas densidades, el depredador gasta casi todo su tiempo manipulando presas, y el grado de depredación alcanza un máximo, determinado 5 LECTURA RECUMENDADA. Para ver más ejemplos del tipo 2 de respuesta funcional, leer las páginas 326-327 del libro de Begon et al. 1995. Figura 11. Daphnia magna se alimenta sobre una levadura (Saccharomyces cerevisiae). Daphnia es un filtrador y, por debajo de determinada concentración umbral de la presa, la cantidad de presa consumida se incrementa de forma lineal con la abundancia de la presa (Nótese que el tiempo de manipulación es 0, ya que las presas van pasando por el tracto digestivo de Daphnia a medida que nada). Una vez alcanzada la concentración umbral, Daphnia ya no puede filtrar más cantidad, incluso aunque la abundancia de la presa se incremente (Begon y Mortimer 1986: 119). 11 lugar donde la presa es solo un poco más abundante que antes, pero suficiente como para que este esfuerzo sea rentable, comienzan a poner huevos rápidamente, de ahí que se observe un incremento desproporcionado de esta función (Figura 12). Referencias 1. Begon, M., Harper, J. L., y Townsend, C. R. 1995. Ecología. Editorial Omega. 2. Begon, M., y Mortimer, M. 1986. Population ecology. Blackwell. 3. Hassell, M. P. 1988. Dinámica de la competencia y la depredación. Oikos-tau. 4. Krebs, C. J. 1986. Ecología. Ediciones Pirámide. Figura 12. (a) Respuesta funcional de tipo 3 (sigmoidal) de icneumónido Venturia canescens parasitado por larvas de Cadra de segundo (círculo negro), tercer (círculo blanco) y cuarto (triángulo) instars. (b) La base de esta respuesta: la relación entre el tiempo dedicado por el depredador a la búsqueda (como porcentaje del tiempo total de observación) y la densidad de larvas del huésped (extraído de Begon et al. 1995: 330). 7.3. La respuesta funcional de tipo 3 Cuando la densidad de comida es elevada, esta respuesta es parecida a la del tipo 2 y tiene la misma explicación: hay un momento en el que la tasa de consumo ya no se incrementa aunque lo haga la densidad de la presa: a medida que la densidad de la presa se incrementa, el tiempo dedicado a la "búsqueda" se convierte en trivial, y comienza a hacerse importante el tiempo de manipulación, hasta que, a altas densidades, el depredador gasta casi todo su tiempo manipulando presas. A diferencia de la respuesta de tipo 2, cuando las densidades de presa son bajas, la respuesta tipo 3 tiene una fase de aceleración durante la cual un incremento de la densidad conduce a un aumento desproporcionado de la tasa de consumo: (1) bien porque aumenta mucho el tiempo que el depredador dedica a la búsqueda, o bien (2) porque disminuye mucho su tiempo de manipulación (p.e. porque se ha hecho más experto realizando esto al haber más presas y por lo tanto más encuentros con ellas). En conjunto, la respuesta tipo 3 es sigmoidal. Por ejemplo, esta respuesta se ha obsercado en algunoas hembras parasitoides adultas que, como no necesitan de su presa para alimentarse, sino solo para poner huevos, prácticamente prescinden del esfuerzo de buscarla cuando la presa está en densidades muy bajas. Pero si se desplazan a un 12