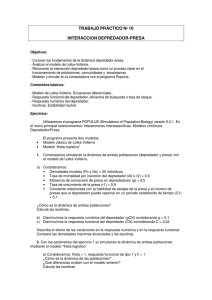
Aplicacion Sistemas de Ecuaciones
Anuncio

Tarea Ecuaciones
Diferenciales
Aplicación de sistemas de ecuaciones
En este trabajo se entrega una pequeña visualización del
potencial de los sistemas de ecuaciones en cuanto a su
aplicación
Esteban Severino Ch
Felipe Draguicevic
Matías Salinas
Rolando Marín
01/06/2010
Los sistemas de ecuaciones diferenciales lineales de 1er orden son denominados de la sgte. forma:
X’1 (t) = a11(t)·x1 + a12(t)·x2 + …… + a1n(t)·xn + b1(t)
X’2 (t) = a21(t)·x1 + a22(t)·x2 + …… + a2n(t)·xn + b2(t)
X’n (t) = an1(t)·x1 + an2(t)·x2 + …… + ann(t)·xn + bn(t)
Otra forma de escribir el sistema sería la de forma matricial la cual es:
=
·
+
Generalizando tenemos que:
X’(t) = A(t)·X(t) + B(t)
Ahora bien si se tiene un sistema homogéneo:
X’ = A(t)·X =
·
Sea α un valor propio de la matriz de coeficientes constantes A =
propio asociado al valor propio α. Entonces:
X=
, si v es un vector
·v
Es una solución no trivial del sistema homogéneo
Dependiendo del polinomio característico pa(x) se van a tener n-valores propios con lo que
se tiene n-soluciones l.i, entonces lo que tenemos es:
X = c1
·v1 + c2
·v2 +
+ cn
·vn
Para el caso que el polinomio característico presente multiplicidad m para un valor propio,
entonces ese valor propio generará m-soluciones. En caso de que no se pueda obtener con la matriz
ampliada del polinomio característico evaluada en el valor propio se tiene la sgte. forma:
(A(t) - αIn)d+1·u1 = 0
(A(t) - αIn)·u1 = u2
(A(t) - αIn)·uk-1 = uk
Entonces definimos:
v1 = uk; v2 = uk-1;
; vk = u 1
Las soluciones serán:
x1(t) =
·v1
x2(t) =
·[v1·t + v2]
Xk(t) =
·
En el caso de que el polinomio característico tenga valores propios en los complejos, entonces su
conjugado también será un valor propio
α = p + i·q
;
α’ = p - i·q
Y las soluciones estarán dadas por:
X = v·
·[cos(qt) – isen(qt)]
donde: v = v1 + i·v2
Tal que (A - αIn)(v) = 0
Las soluciones en concreto son:
x1 = Re(x)
;
x2 = Img(x)
Ahora bien las aplicaciones de los sistemas puede darse en un tema de ecología o zoología, a
continuación se presentan tres modelos para la aplicación de matrices:
Modelo Depredador-Presa
Se tendrá x(t) e y(t) los cuales representarán a la cantidad de población de las especies en
función del tiempo, estos tienen una relación depredador-presa donde x(t) será el depredador e
y(t) la presa
= -ax + bxy
a
0, b
0
= hy – kxy
h
0, k
0
Se tiene que el depredador por si solo no aumenta su población (-ax) pero al interactuar con la otra
especie se ve beneficiada lo que se refleja en un aumento de población (bxy), en cambio, la presa,
por si sola aumenta su población (hy), mientras que en la interacción con el depredador se ve
perjudicada (-kxy).
Modelo de Competencia
En este modelo dos especies compiten por el mismo recurso.
= ax - bxy
a
0, b
0
= hy - kxy
h
0, k
0
Aquí las dos especies por si solas aumentan su población, pero al interactuar con la otra ven
mermado su crecimiento.
Modelo cooperación: Simbiosis
En este modelo las especies se ayudan mutuamente, ya sea directa o indirectamente.
= ax - bxy
a
0, b
0
= hy - kxy
h
0, k
0
La interacción entre ambas las beneficia, pero cada una por si sola no podría subsistir.
Las interacciones entre las especies se refleja como la multiplicación entre sus poblaciones lo cual
arroja sistemas no lineales, pero para nuestro caso los simplificaremos y usaremos la población de
la especie contraria por un factor.
1.Suponiendo que dos especies por si mismas pueden subsistir y que la interacción entre
ambas las beneficia
x’ = 2x + 3y
A=
y’ = y + 2x
~
=
x1(t) =
→
→
=x
·
~
=
→
=x
x2(t) =
x(t) =C1
-2x + y = 0
·
·
+ C2
·
=
x+y=0
→
y = -x
y = 2x
2.-
Este es un cuadro depredador-presa en donde x’ es la presa e y’ es el depredador
x’ = 3x - 18y
A=
y’ = -9y + 2x
~
=
X1(t) =
→
x - 3y = 0
→
3y = x
=y
·
X2(t) =·
X(t) = C1
·
+ C2 ·
=
3.En este modelo podemos apreciar simbiosis y depredador presa al mismo tiempo x(t) y z(t)
son depredadores de y(t) y hacen simbiosis entre ellos
Det[Pa(α)] =
=
3
- 11
2
+ 36 – 36
=
λ1 = 2; λ2 = 3; λ3 = 6
Spect A= {2, 3, 6}
Si =2
~
~
Entonces
x = -z
y=0
V (2) =
=x
=
X1 =
Si =3
x=y=z
Entonces
V (3) =
=x
=
X2 =
Si =6
-2x = y = -2z
Entonces
=0
V (6) =
=x
=
X3 =
Luego:
X = λ1
+ λ2
+ λ3
con λ1, λ2 y λ3 ctes. en R.
4.Tenemos un modelo depredador presa en la cual el depredador no decrese su población
por si mismo
x’= 6x - y
y’=5x + 4y
A=
λ²-10λ+29 = 0
λ= 5 + 2i
det(A – λI)=
λ= 5 + 2i
=(6-λ)(4-λ) + 5 = 0
λ= 5 – 2i
=
3.Se tienen dos especies animales las cuales tienen una relación depredador-presa, la
especie depredador tiene una velocidad de crecimiento poblacional igual a un cuarto de su población
con respecto al tiempo y tiene una interacción con la presa igual a dos veces la población de la
presa, mientras que la velocidad de crecimiento de la presa es igual a tres veces su población y su
interacción con el depredador es una vez la población de éste. Si se sabe que hay 1000 animales
que son presas y 300 que son depredadores en un inicio, en un tiempo de 5 años, ¿que cantidad
quedará de cada especie?
Sea
x(t) depredador e y(t) presa
x’ = - + 2y
A=
y’ = 3y – x
Pa ( ) =
→
2
=0 → (
+
-
=0
→
=
= 1.85
= 3.1
Obtenidos los valores propios reales la resolución es simple