Tema 12. Depredación y herbivorismo
Anuncio

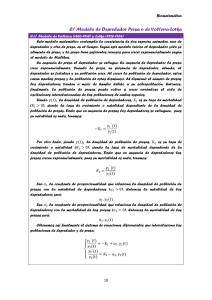
Tema 12. Depredación y herbivorismo Bloque temático III. Ecología de Poblaciones Ecología (1861 y 1812) Grado de Biología y de Ciencias Ambientales. UMU Índice 1. Introducción 1.1. Si te pillo ¿te como? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.2. Si no te como me muero . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1 1 2 2. El modelo Lotka-Volterra 2.1. Un ejemplo de cálculo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.2. Análisis del modelo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.3. Inconvenientes del modelo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2 3 4 8 3. Mejorando el modelo 3.1. Un modelo con densodependencia de la presa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.2. Un modelo con densodependencia de la presa y saciamiento del depredador . . . . . . . . . . . . . . 3.3. Un modelo con densodependencia para ambos y depredador saciable . . . . . . . . . . . . . . . . . . 8 8 11 13 4. Experimentos clásicos en depredación 13 5. Referencias 17 6. Bibliografía 17 1. Introducción Cuando los individuos de una población utilizan a los de otra (o partes de ellos) como alimento hablamos de depredación (muerte o pérdida de biomasa). Las distintas estrategias de presas y depredadores para la captura y la evasión pueden ser muy sofisticadas, sin embargo los aspectos esenciales son relativamente simples. Aparentemente se trata de un proceso estable pero. . . pero veremos como el análisis del modelo de depredación arroja, de nuevo, resultados muy interesante y aparentemente paradójicos. 1.1. Si te pillo ¿te como? La abundancia de las presas y la del propio depredador son el elemento determinante de la interacción; esta se produce de forma directamente proporcional al producto de las abundancias de las dos poblaciones. Sin embargo, no todos los intentos de un depredador en la captura de alimento terminan con éxito. Podemos resumir diciendo que el número de muertes de las presas es proporcional a su número (H) y al de depredadores (P ), que determina los encuentros (P H), y a un factor de éxito en el ataque (a); por lo tanto, el número de presas muertas por unidad de tiempo es: a P H. Podemos escribir la ecuación del crecimiento de una presa como: ∆H =RH ∆t Si añadimos el término de mortalidad asociado a los ataques del depredador: ∆H = R H − aP H ∆t El coeficiente a se entiende como número de muertes producidas por depredador por unidad de tiempo y sus dimensiones son por tanto [P −1 T −1 ]. 1 1.2. Si no te como me muero Consideramos que la población del depredador necesita para su crecimiento a la presa, de lo contrario la población decrece por su mortalidad natural (s). Así tenemos: ∆P = −s P ∆t Cuando el depredador dispone de presas (a P H) las transforma, con una determinada eficiencia (e), en nuevos depredadores; por lo tanto en nuestro caso: e a P H son los nuevos depredadores producidos. La ecuación para el depredador es: ∆P = eaP H − s P ∆t Para ajustar las dimensiones de la ecuación el parámetro e es [P H −1 ], esto es, depredadores producidos por presa capturada. 2. El modelo Lotka-Volterra El modelo que acabamos de escribir es una versión, con un cambio en la notación y en versión discreta, del planteado por los investigadores Lotka (1920) y Volterra (1926). En el trabajo del primero se incluye las siguientes consideraciones y ecuaciones: Sobre la presa (X1 ): Sobre el depredador (X2 ): Ecuaciones del modelo: El planteamiento de inicial de Lotka se hace pensando en cantidad de biomasa, pero resulta igual de válido cuando consideramos número de individuos o densidad. Utilizando una notación más actual escribimos el modelo: 2 dH = rH − aP H dt dP = eaP H − sP dt La versión discreta, que hemos introducido antes es análoga (las tasas son discretas), aunque proporciona unos resultados distintos, cuestión que abordaremos más adelante. ∆H = R H − aP H do ∆P = e aP H − s P dt 2.1. Un ejemplo de cálculo Utilizando el modelo discreto veamos como varían los tamaños de las poblaciones teniendo un sistema depredador– presa con una población inicial de 130 individuos presas y 10 depredadores, la tasa neta de las presas es de 1.2 y el coeficiente de ataque 0.1, al eficiencia del depredador 0.02 y su mortalidad natural 0.2. Producción de la presa Tenemos que calcular en primer lugar la producción de la presa, como la diferencia entre el crecimiento dado su tasa neta de crecimiento en ausencia de los depredadores y la mortalidad debida a los ataques efectivos de los estos. ∆H = R H − a P H = 1.2 × 130 − 0.1 × 130 × 10 = 156 − 130 = 26 dt Producción del depredador Ahora calculamos la producción del depredador a partir de la presas conseguidas como alimento (dependiendo de la eficiencia) y de la mortalidad natural de esta población ∆P = e a P H − s P = 0.02 × 0.1 × 130 × 10 − 0.2 × 10 = 2.6 − 2 = 0.6 dt El sistema ha producido 26 presas y 0.6 depredadores, por lo tanto, sus poblaciones pasan, respectivamente, de 130 a 156 presas y de 10 a 10.6 depredadores. Para las 5 primeras unidades de tiempo, los cambios en las poblaciones quedan registrados en la siguiente tabla t H0 R Ht a Pt Ht ∆H ∆t Ht+1 P0 e a Pt Ht s Pt 0 1 2 3 130.0 156.0 177.8 181.6 156.0 187.2 213.4 217.9 130.0 165.4 209.7 247.4 26.0 21.8 3.7 -29.4 156.0 177.8 181.6 152.2 10.0 10.6 11.8 13.6 2.6 3.3 4.2 4.9 2.0 2.1 2.4 2.7 ∆P ∆t 0.6 1.2 1.8 2.2 Pt+1 10.6 11.8 13.6 15.8 Al representar gráficamente la dinámica, considerando 15 unidades de tiempo, obtenemos el siguiente gráfico, donde se sombrean los valores calculados en la tabla anterior: 3 100 0 50 Abundancia 150 Presa Depredador Cálculos en la tabla 0 5 10 15 Tiempo Se aprecia claramente en el gráfico como el aumento de la abundancia de la presa lleva a un aumento de la abundancia del depredador, lo que provoca una disminución de la presa y por consiguiente una disminución del depredador. . . 2.2. Análisis del modelo En primer lugar, calcularemos las isoclinas que determinan los puntos para los que el crecimiento (o producción) de las poblaciones de la presa o del depredador es cero. 2.2.1. Isoclina de la presa dH =0 dt 0 = r H − aP H aP H = r H aP = r r P = a Como vemos, la isoclina de la presa es constante y su valor viene determinado por la relación entre la tasa reproductiva y el coeficiente de depredación. La isoclina tomará valores más alto cuando la tasa reproductivas de la presa sean de mayor valor o los ataques de los depredadores tengan una menor tasa de éxito. Entendemos que la isoclina determina, en este caso, el número de depredadores para los que la toda la producción de la presa es atrapada por el depredador. En el siguiente gráfico se representa el espacio de fase para un sistema depredador presa reflejando el signo la producción con vectores. Por debajo de la isoclina, la región sombreada con verde, hay producción de la presa que se destina a crecimiento de su población, por lo tanto, el vector de crecimiento se dirige hacia la derecha. En relación a la presión del depredador, podemos considerar que son “pocos” y por tanto la presión es baja. Por el contrario, por encima de esta isoclina el número de depredadores es grande y se consume tanto la producción de la presa como como la propia población productora; en consecuencia la producción es negativa y el vector de crecimiento apunta a la izquierda. 4 P R a 0 2.2.2. 0 H Isoclina del depredador dP =0 dt 0 = e aP H − sP eaP H = s P eaH = s s H= ea Como en el caso de la presa, la isoclina del depredador es, también, una constante; la representación gráfica aparece en la siguiente figura, que incluye los vectores de crecimiento. En este caso, la región sombreada, de color rosado, a la izquierda de la isoclina recoge la región donde el número de presas disponibles para el depredador es “insuficiente” y por ello la producción del depredador es negativa, el vector apunta haca abajo. Cuando el número de presas supera el valor de la isoclina el depredador presenta una producción positiva y el vector apunta hacia arriba. P 0 s 0 e a 5 H 2.2.3. El espacio de fase Si representamos ahora las dos isoclinas en el espacio de fase vemos que se produce cuatro regiones; además, hay un punto de intersección entre las isoclinas que determina un punto de equilibrio. Como vemos en el siguiente gráfico los vectores de crecimiento no apuntan al equilibrio y sugieren un comportamiento cíclico. P R a 0 s 0 H e a De forma más detallada, los vectores del sistema para distintas situaciones se recogen en la siguiente figura; en ella se presenta, la dirección la magnitud del cambio que está relacionado con la proximidad del punto, que representa la situación de partida, a las isoclinas. 80 40 60 P 100 120 En la figura se recogen los vectores en el entorno del punto de equilibrio (con el fin de obtener un gráfico legible); puede apreciarse como con grandes tamaños de población en presas y depredadores se producen grande mortandades de presa, por el contrario en el caso de muchas presas y pocos depredadores las producciones de aquellas son muy grandes. En general, con pocas presas los depredadores tiene pérdidas de población, más grandes cuanto mayor sea su población. 40 60 80 100 120 140 160 H 2.2.4. El crecimiento de las poblaciones y la órbita del sistema Asumido el modelo y calculada la dinámica del un sistema depredador presa con condiciones fijas y tamaños iniciales de las poblaciones distintos el resultado es distinto, siempre que los puntos no pertenezcan a la misma órbita, como 6 500 1000 modelo1$Presa 1500 Presa Depredador 2000 0 Abundancia modelo0$Presa 2000 veremos más adelante. En la figura siguiente se muestran cuatro dinámicas para una misma situación (con los valores de los parámetros iguales). 500 1000 modelo3$Presa 1500 modelo1$Tiempo 0 Abundancia Abundancia modelo0$Tiempo 0 20 40 60 80 100 0 20 Tiempo 40 60 80 100 120 Tiempo tiempo modelo2$Tiempo 200 Ahora veamos el espacio de fase asociado a cada una de estas dinámicas: 150 (H0, P0) = (1005, 185) 100 Depredador (H0, P0) = (1005, 120) (H0, P0) = (1005, 85) 0 50 (H0, P0) = (1005, 55) 500 1000 1500 2000 Presa Si el inicio del sistema es un punto de la órbita el sistema traza esa misma órbita; por el contrario el cambio en la abundancia de depredador o presa fuera de esa órbita suponen una nueva órbita; cuanto más se aleje del punto de cruce de las dos isoclinas más amplia es la órbita. La representación tridimensional de la abundancia de las dos especies frente al tiempo proporciona, en cualquiera de los casos anteriores, un gráfico semejante al siguiente (donde se utilizan, en este caso, los datos correspondientes a la figura anterior para H0 = 1005 y P0 = 120): . 7 Depredador 120 Presa 100 tiempo 80 0 60 20 40 40 20 600 60 800 1000 80 1200 1400 100 1600 2.3. Inconvenientes del modelo La simplicidad de este modelo implica algunos inconvenientes destacables: Las isoclinas son independientes del número de depredadores o presas y aparecen como rectas y perpendiculares. Las órbitas del sistema son curvas cerradas dependientes de las condiciones iniciales. El modelo carece de realismo: • No se incluye la competencia intraespecífica entre las presas ni entre los depredadores, asumiendo el crecimiento ilimitado en las dos poblaciones. • Los depredadores carecen de saturación, su tasa de consumo es ilimitada y realizando nuevas capturas instantáneamente. El modelo no presenta tendencia a una estabilidad, que debería reflejarse en un punto de equilibrio. Cabría añadir que el modelo discreto no es estable e inevitablemente conduce a la extinción del depredador o de la presa y el depredador, sin embargo este aspecto parece realista a la luz de algunos resultados experimentales, que veremos más adelante. 3. Mejorando el modelo Incluiremos a continuación distintos aspectos para aumentar el realismo del modelos, analizando los resultados de esta nuevos elementos en el comportamiento del modelo. 3.1. Un modelo con densodependencia de la presa La inclusión de la densodependencia de la presa en el modelo es relativamente simple, basta con añadir el factor de densodependencia (1 − N/K) en nuestro caso hablaremos de la capacidad de carga para la presa y lo representaremos 8 con Kh . Hay que tener en cuenta que si no hay depredadores, lógicamente, el tamaño de la población de la presa alcanza su capacidad de carga. Este factor afecta al término de crecimiento de la presa; la ecuación para el depredador permanece igual la considerada anteriormente en el caso de Lotka-Volterra, tenemos entonces que el modelo se puede expresar como: dH H = rH 1− − aP H dt Kh dP = eaP H − sP dt En este caso la isoclina de la presa no es constante ya que: dH =0 dt 0 = rH H rH 1− = aP H Kh H = aP r 1− Kh r H 1− =P a Kh H 1− Kh − aP H El resultado es una isoclina decreciente que corta los ejes en dos puntos: Si H = 0, “no hay presas”, entonces: r P = a r P = a 0 1− Kh Si no hubiera presa, o la densidad fuera extremadamente pequeña, cabría esperar, que el potencial reproductor no se viera afectado por la densodependencia. El punto de corte con el eje de ordenadas es (0, ar ). Para P = 0, “no hay depredadores”, tenemos: r H 0= 1− a Kh H 0= 1− Kh H 1= Kh H = Kh Lo que proporciona el punto de corte con el eje de abscisas (Kh , 0). La siguiente dinámica se obtiene con este modelo: 9 500 300 0 100 Abundancia Presa Depredador 0 5 10 15 20 25 Tiempo en el siguiente gráfico representamos el espacio de fase para este caso indicando la región de crecimiento de la población de la presa en color verde y la isoclina del depredador aparece con línea discontinua de color rojo, la órbita, en azul, muestra los distintos estados en cada momento: r Depredador a 0 s Kh 0 ea Presa En el siguiente gráfico podemos ver con detalle la tendencia y magnitud de los cambios en la producción del sistema. Cuidado: este gráfico se ha obtenido con un programa que utiliza una notación ligeramente distinta a la empleada en el texto. dH dt = bH(1 − HK) − aPH = eaPH − sP 100 50 0 Depredador 150 dP dt 0 200 400 600 800 1000 Presa b=0.8 s=0.2 a=0.005 e=0.1 s=0.2 K=1000 10 En resumen, añadir al modelo la densodependencia de la presa ha proporcionado estabilidad al convertir la intersección de las isoclinas en un punto de equilibrio estable1 . 3.2. Un modelo con densodependencia de la presa y saciamiento del depredador Debemos entender que el depredador puede necesitar un periodo de tiempo para procesar la biomasa de la presa capturada, esto lleva a la idea de tipos de depredadores. En este caso nos vamos a fijar en aquellas situaciones en las que el depredador se sacia, depredador tipo II, es decir, los ataques del depredador son función del número de presas hasta de una determinada cantidad, a partir de estas el número de ataques permanece constante. Número de ataques por presas por presa disponible Número de ataques por presas Podemos representar gráficamente este concepto de la siguiente forma: Tipo de depredador 0 0 I II 0 0 Número de presas disponibles Número de presas disponibles 1 Cambiando el ataque constante del modelo anterior, a, por una función del número de presas D+H , siendo D un valor que refleja el tamaño de la población que satura al depredador (cuanto menor sea este antes se aprecia la saturación), así, tamaños muy grandes hacen inapreciable el efecto. Este término, viene ponderado por una constate de peso w; con dimensiones [H T −1 ]. Este cambio afecta tanto a la ecuación del depredador como a la de la presa: dH H w = rH 1− PH − dt Kh D+H dP w =e P H − sP dt D+H El resultado más evidente es la aparición de una isoclina parabólica en el caso de la presa2 . Ea siguiente figura 1 Para los más curiosos, podemos determinar de una forma sencilla el punto de equilibrio sin más que sustituir en la fórmula de la isoclina de la presa: r H P = 1− a Kh el número de presas en el equilibrio: esa r s 1 P = 1− a e a Kh que proporciona: s sr P = − ea e a2 Kh que en nuestro ejemplo se corresponde con 96 depredadores para 160 presas (que determina la isoclina del depredador). 2 Para los más curiosos, la isoclina de la presa: 0 = rH 1− H Kh − w PH D+H que despejando, proporciona: Kh − H wP = Kh D+H r (Kh − H) wP = Kh D+H r (Kh − H) (D + H) P = w Kh r 11 Abundacia Depredador Abundacia Depredador Abundacia Depredador Abundacia Depredador Abundacia Depredador muestra distintas situaciones afectadas de un valor de D distinto; queda reflejada claramente el papel que juega la posición de la isoclina del depredador en relación con el máximo de la parábola. Presas Tiempo Simplificando vemos claramente la parábola: P = r w D+H − D H + H2 Kh El corte con el eje de ordenadas se produce en: P = rD w 12 Si la isoclina del depredador está a la izquierda de máximo de la parábola de la isoclina de la presa se producen situaciones de oscilación permanente en torno al punto de equilibrio más amplias cuanto más a la izquierda; por contra, cuando se sitúa a la derecha se producen situaciones de equilibro estable. Cabe afirmar, que según este modelo, la saciedad de la presa favorece la estabilidad del sistema. Además, tenemos ahora un modelo que, en función de los valores de sus parámetros, puede llegar a situaciones bien distintas, desde un equilibrio estable a las oscilaciones más o menos amplias. En este modelo se puede dar la llamada paradoja del enriquecimiento; se produce cuando en un sistema se pretende explotar al depredador gracias a un “enriquecimiento” del medio para aumentar la capacidad de carga de la presa. Depredador En el siguiente gráfico se representan un sistema estable, con una capacidad de carga para la presa K; las isoclinas se representa con línea continua. Se añade además la isoclina correspondiente a una elevación de la capacidad de carga hasta K 0 tras un enriquecimiento del sistema. Puede comprobarse que la posición de la isoclina del depredador queda por detrás del máximo de la isoclina de la presa lo que da lugar a un sistema con oscilaciones. K K' Presas 3.3. Un modelo con densodependencia para ambos y depredador saciable Sólo entraremos en las ecuaciones del modelo, pues los resultados son razonablemente similares a los del modelo anterior. En este caso el factor de densodependencia para el depredador podríamos incluirlo con (1 − P/Kp ), pero cabe asumir una capacidad de carga del depredador (Kp ) dependiente del número de presas y que por lo tanto no es constante; podemos expresar este factor como: (1 − P/f H) siendo f una constate para trasformar el número de presas en número de depredadores soportados por cada una estas, dimensionalmente: [P H −1 ]. dH H w = rH 1− − PH dt Kh D+H dP w P =e P H 1− − sP dt D+H fH 4. Experimentos clásicos en depredación Entre los primeros trabajos que ponen de manifiesto el comportamiento cíclico de la abundancia de depredador y presa se encuentran los de Elton (1924) que trabajo con datos de capturas de presas y depredadores. En el siguiente gráfico se recogen las variación de numero de pieles para Lepus americanus y Lynx canadensis, liebres y linces, según los datos de la Hudson’s Bay Company desde 1845 hasta 1935. 13 150 100 50 0 Número de pieles Liebres Linces 1860 1880 1900 1920 Año Pero fueron los datos publicados por Elton (1924) los que iluminaron los primeros trabajos de estudios cuantitativos de sistemas depredador–presa, estos aparecen en su trabajo de la siguiente forma: Es importante tener en cuenta que no se trata de un trabajo experimental pues los datos proceden de los inventarios de la compañía de pieles, sin embargo, dada la longitud de la serie, estos datos, pueden entenderse como un buen ejemplo sistemas de depredador–presa. Otro investigador que aporta interesantes resultados en el campo de la relaciones interespecíficas es Gause (1934) que realizó trabajos con un sistema formado por Didínum narutum (depredador) y Paramecium caudatum, siendo el primero depredador del segundo como muestran las siguientes imágenes: 14 En los siguientes gráficos se muestran los resultados del los experimento que finalmente muestran un sistema en equilibrio oscilante: a) un sistema con un medio limpio la presa crece y al añadir el depredador se produce una extinción de ambos. b) Un medio con partículas que actuan de barrera para los ataques del depredador, en pocos días la población depredadora se extingue c) Un sistema estable con oscilaciones cuando se añaden depredadores de forma regular (a modo de inmigraciones). 15 El un interesante experimento de Huffaker (1958) un sistema depredaor prsa en un mosaico espacial complejo, con dos especies ácaros Eotetranychus sexmaculatus y Typhlodromus occidentalis, presa y depredador respectivamente. Se pudo reproducir un sistema oscilante. Para ello fué necesario realizar un sitema espacial complejo alternando naranjas y bolas de caucho, con distribución aleatoria. Además, las naranjas fueron preparadas para que sólo su ápice fuera colonizable, creando ademas varias regiones no accesibles aisladas con baselina. La imagénes siguientes muestran como se preparó el material para el experimento. Población de presas (x103) Población de depredadores Población de depredadores Población de presas (x103) La figura siguiente muestra los resultados obtenidos en tres situaciones distintas: sólo la presa, la presa y el depredador (sin restricciones) y la presa y el depredador con las barreras descritas anteriormente. Tiempo (dias) 16 Podemos afirmar que la supervivencia del sistema se gana jugando al escondite: a) Fluctuaciones de la población de Eotetranychus sin su depredador. b) Una sola oscilación del depredador y la presa en un sistema simple, con extinción de la presa y posteriormente del depredador. c) Oscilaciones sufridas en un sistema más complejo Tomado de Begon et al (2006), según de Huffaker (1958). En estos trabajos se muestra como la aparición de un sistema oscilante se apoya en una complejidad ambiental; otros trabajos del mismo autor muestran resultados análogos con sistemas más complejos generados a un aumento del número de “bandejas”. 5. Referencias Begon, M; Harper, JL; Townsend, CR. 2006. Ecology. From Individuals to Ecosystems. Blackwell Publishing, Oxford. Elton, CS. 1924. Periodic Fluctuations in the Numbers of Animals: Their Causes and Effects. Journal of Experimental Biology 2(1): 119–163 Gause, GF. 1934. The struggle for existence. Williams & Wilkins. Baltimore. Huffaker, CB. 1958. Experimental Studies on Predation: Dispersion Factors and Predator-Prey Oscillations. Hilgardia 27(14):343-383. Lotka, AJ. 1920. Analytical Note on Certain Rhythmic Relations in Organic Systems. Proc. Natl. Acad. Sci. U.S., 6: 410–415. Volterra, V. 1926. Variazioni e fluttuazioni del numero d’individui in specie animali conviventi. Mem. Acad. Lincei Roma 2:31–113. 6. Bibliografía Begon, M; Harper, JL; Townsend, CR. 1988. Ecología. Omega, Barcelona. Molles, MC. 2006. Ecología. McGraw. McGraw-Hill/Interamericana, Madrid. Piñol, J y Martínez-Vilalta, J. 2006. Ecología con números. Lynx, Barcelona. Smith, RL y Smith, TM. 2001. Ecología. Adison Wesley, Madrid. 17