Soluciones (problema 3)
Anuncio
")
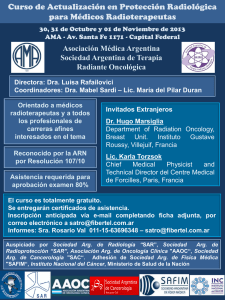
Universidad de Oviedo Dpto: IEECS Area: ISA Escuela Politécnica Superior de Ingeniería de Gijón Ingeniero de Telecomunicación Análisis Dinámico de Sistemas 2º Curso 10 de Febrero 2009 Puntos: 2; Tiempo: 30 minutos Problema nº3 1. Mediante la aplicación del criterio de Nyquist, deducir si el sistema realimentado, unitaria y negativamente, es estable o inestable. 2. A partir del resultado anterior, deducir razonadamente, que valores podrían invertir el resultado obtenido, mediante la modificación de la ganancia. G(s) = X(s) 6(s-1) (s+3) (s+1) G(s) Ex10Feb2009; Ej.3 Y(s) Escuela Politécnica Superior de Ingeniería de Gijón Ingeniero de Telecomunicación Análisis Dinámico de Sistemas 2º Curso Universidad de Oviedo Dpto: IEECS Area: ISA Calculamos los puntos en que la imágen corta a los ejes real e imaginario. 6(jw -1) G(jw )= 2 (3-w ) + j4w Para s= jw obtenemos: ( ) 2 2 6(jw -1) [(3-w ) - j4w ] G(jw )= 2 2 2 (3-w ) + 16w 2 Parte Real de G(jw ) = 0 => 5w -3 = 0 w = 0,77 ; | G(jw )| =± 1,93 2 6[(5w -3) + jw (7-w )] G(jw )= 2 2 2 (3-w ) + 16w 2 =0 Parte Imaginaria de G(jw ) = 0 => 7-w w = 0, w =± 2,64 ; | G(j0)| = 2, | G(j2,64)| = 1,5 El camino de Nyquist elegido es el indicado en la figura. Tramo ab: s = jw : 6| (jw -1)| | G(jw )| = | (jw +3)| | (jw +1)| b s=Re jq | G(jw )| = R s=jw q -2 1+w 2 2 | G(jw )| = 9+w 1+w a -3 2 6 6 2 9+w c 1 Arg (G(jw )) = Arct ( w /-1) - Arct (w /3) - Arct (w ) d P Para w => 0; | G(j0)| = 2, y Arg (G(j0)) = p -0-0=p Para w = 0,77; | G(j0,77)| = 1,93, y Arg (G(j0)) = p /2 s=-1+jw s=1+jws=3+jw Para w = 2,64; | G(j2,64)| = 1,5, y Arg (G(j0)) = 0 Para w => ¥ ;| G(j¥ )| = 0, y Arg (G(j0)) = p /2 - p /2 - p /2 = p /2 -1 1 Ex10Feb2009; Ej.Rej3:1 3 Universidad de Oviedo Dpto: IEECS Area: ISA Escuela Politécnica Superior de Ingeniería de Gijón Ingeniero de Telecomunicación Análisis Dinámico de Sistemas 2º Curso jq p / 2 > q > p / 2 Tramo bcd: s = Re ; Ri >... R3 > R2 >R1 jq Si i =>¥ Rie +a => Rie R3e R2e R1e jq a jq jq R3e +a | G(Re )| = jq jq a jq jq 6| (Rejq -1)| | (Rejq +3)| | (Rejq +1)| R2e +a jq a jq R1e +a | G(Rejq )| = q a | G(Re )| = jq 6| (Re -1)| jq jq | (Re +3)| | (Re +1)| 6| | Rejq Re | | Re | | jq jq | G(Re )| = jq 6 R Arg (G(Rejq )) = - q b s=Re s=jw jq Para R => ¥ ;| G(Re )| => 0, R jq q a -3 -2 1 Para q =p /2 ; Arg (G(Rejq )) = -p /2 c Para q = 0 ; Arg (G(Rejq )) = 0 Para q = -p /2 ; Arg (G(Re )) = p /2 jq d P Criterio de Nyquist: N = 1, P = 0; N = Z - P; Z = 1 El sistema en bucle cerrado tiene un polo en el semiplano real positivo. Por tanto es: INESTABLE Como se ha visto anteriormente, el corte con el eje real negativo viene dado por: | G(jw )| = k 2 9+w Para w = 0 => | G(jw )| = K/3, de esto deducimos: 0 < K < 3 => | G(jw )| < 1 Sistema ESTABLE K = 3 => | G(jw )| = 1 Sistema CRITICO K > 3 => | G(jw )| >1 Sistema INESTABLE Ex10Feb2009; Ej.Rej3:2 Escuela Politécnica Superior de Ingeniería de Gijón Ingeniero de Telecomunicación Análisis Dinámico de Sistemas 2º Curso Universidad de Oviedo Dpto: IEECS Area: ISA Mediante Matlab obtenemos: 30/01/09 11:57 MATLAB Command Window 1 of 1 To get started, select MATLAB Help or Demos from the Help menu. >> % respusta polar. Nyquist. nyquist(n1,d1) axis equal >> Nyquist Diagram 2 1.5 1 Imaginary Axis 0.5 0 -0.5 -1 -1.5 -2 -2.5 Ex10Feb2009; Ej.Rej3:3 -2 -1.5 -1 -0.5 0 Real Axis 0.5 1 1.5 2 2.5