ACHISINA
Dinámica de Sistemas Lineales
Profesores
R. Boroschek – T. Guendelman
12 - 16 de Mayo 2008
ACHISINA
DINAMICA DE ESTRUCTURAS – TOMÁS GUENDELMAN B
1
ACHISINA
PARTE II
ANALISIS SISMICO DE EDIFICIOS
Tomás Guendelman B.
DINAMICA DE ESTRUCTURAS – TOMÁS GUENDELMAN B
2
ACHISINA
ANALISIS SISMICO DE EDIFICIOS
1 EDIFICACION ANTISISMICA
1.1 EDIFICIO COMO ESTRUCTURA
Un edificio es una estructura constituida esencialmente por componentes verticales y
horizontales. Las primeras conforman los ejes resistentes -marcos, muros o sistemas
mixtos marco-muro- y las segundas, las losas de piso, que originan la redistribución de
esfuerzos. Para ellas generalmente se acepta un comportamiento tipo diafragma
indeformable en su propio plano, suposición que debe ser revisada en cada proyecto,
pues un número elevado de perforaciones de las losas, o diferencias importantes
(superiores a cuatro veces) entre las dos dimensiones en planta de las mismas, pueden
invalidar la hipótesis de diafragma rígido en su plano.
El propósito de un edificio es cobijar personas y equipamiento y la estructura del edificio
debe ser capaz de transferir las cargas desde su punto de aplicación al suelo,
minimizando el riesgo de sus ocupantes. Los elementos resistentes (ejes) verticales se
suponen con rigidez adecuada en su propio plano y con rigidez despreciable fuera de él.
Es decir, en si mismos, actúan como estructuras planas. La vinculación entre los distintos
ejes resistentes se materializa por dos caminos:
a)
A través de las losas, que imponen como diafragma una relación cinemática
entre los desplazamientos horizontales de los puntos situados sobre ellas,
pertenezcan éstos a uno o a varios ejes resistentes.
b)
A través de la consideración del monolitismo estructural, que se manifiesta en
las aristas comunes, verticales, entre dos o más ejes resistentes.
En esta última situación se puede tener desplazamientos verticales comunes y giros
comunes. Estos últimos requieren un tratamiento especial porque pueden provenir de
estados de esfuerzos de distinta naturaleza. Por ejemplo, en la concurrencia de vigas
mutuamente perpendiculares, la compatibilidad de giro implica que el giro en el extremo
de una de las barras, debido a flexión, se iguale con el giro en la segunda barra en el
punto de encuentro con el anterior y que corresponde a torsión. La capacidad resistente a
torsión es, en general, muy baja en los elementos de hormigón armado, razón por la cual
hay consenso en ignorarla. Lo propio ocurre en el caso de estructuras metálicas con
miembros estructurales constituidos por planchas delgadas, formando perfiles abiertos en
los que la rigidez torsional es despreciable frente a la rigidez por flexión.
DINAMICA DE ESTRUCTURAS – TOMÁS GUENDELMAN B
3
ACHISINA
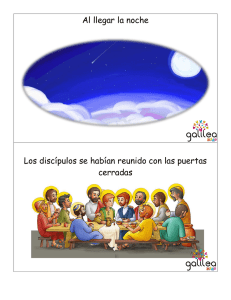
El caso de la torsión debe observarse con mayor detenimiento, distinguiéndose entre dos
situaciones: TORSION PRIMARIA (o de equilibrio) y TORSION SECUNDARIA (o de
compatibilidad), según se muestra a continuación:
La barra AB (vista en planta) está sometida
a un momento torsor Pa y debe contar con
la capacidad y rigidez necesarias para no
romperse ni deformarse en exceso.
B
TORSION
PRIMARIA
P
A
a
B
TORSION
SECUNDARIA
D
E
F
G
P
A
C
La barra FG de la figura vista en planta,
experimentará giros en F y en G. Si se
materializa la compatibilidad de giros con
las vigas AB y CD, se inducirán torsiones en
estas últimas. Si por razones de capacidad
insuficiente, o de baja rigidez, esta
compatibilidad desaparece o es irrelevante,
la barra FG permanece en equilibrio y sólo
tiene en común con AB y CD sus
desplazamientos perpendiculares al plano.
En lo sucesivo entenderemos que los edificios no requieren la compatibilidad de giros de
miembros en los que se desarrolle torsión y que si es necesario, tal efecto podrá ser
tomado en cuenta mediante un modelo especifico de tipo tridimensional.
1.2 ACCION SISMICA
Los terremotos que ocurren en grandes ciudades provocan severos impactos en la
economía de un país, con daños materiales que ascienden a varios miles de millones de
dólares, numerosos damnificados y victimas fatales En tal circunstancia, es necesario
traducir, con la mayor urgencia, sus lecciones en acciones destinadas a brindar protección
sísmica, desde lo que podríamos denominar "cultura sísmica", hasta la producción de
nuevos códigos de diseño, que tardan varios años en consolidarse, provocando así un
desequilibrio entre los nuevos conocimientos disponibles y el acceso a ellos de la
comunidad profesional.
DINAMICA DE ESTRUCTURAS – TOMÁS GUENDELMAN B
4
ACHISINA
Hoy se cuenta con computadores de alta capacidad y rendimiento y con sofisticados
instrumentos de captura de datos durante los sismos, con lo que este “gap” entre
conocimiento académico y normativa se ha ido cerrando. Tal es el caso de las normas
sísmicas chilenas oficiales NCh433.Of96, NCh2369.Of2003 y NCh2745-2003, para
edificios habitacionales o de oficinas, para edificios e instalaciones industriales y para
edificios con aislación sísmica, respectivamente
En los edificios que se construyen actualmente en el país, se emplean modelos teóricos
de análisis de alta confiabilidad, que incorporan ligazones en las aristas comunes de los
elementos resistentes verticales; consideran la ausencia o la flexibilidad de los diafragmas
de piso; y cuentan con "generadores evolutivos", capaces de tomar en cuenta el proceso
constructivo.
En un edificio convencional, la máxima exposición sísmica suele coincidir con el término
de la construcción, pero en muchos casos, tal aseveración no es automática.
Consecuentemente, en la fase de análisis se debe considerar estados intermedios del
avance de la obra, conducentes a un diseño que pondere por igual, su seguridad
transitoria y final.
La confiabilidad de los modelos analíticos debe estar en armonía con igual exigencia en la
seguridad de la información. En tal sentido, lo más importante ha sido el desarrollo de
programas de modelación automática, que junto con facilitar considerablemente la
entrada de datos, ha originado un notorio aumento de eficiencia en las fases de revisión y
transferencia de información.
Todos los desarrollos anteriores se han visto enfatizados con el empleo de
representaciones gráficas, en impresos y en pantalla, que facilitan una más rápida y total
comprensión del comportamiento de la estructura.
Otro aspecto de importancia lo constituye la medición de la rigidez y de la resistencia del
edificio, relevantes de su "salud sísmica". En un edificio flexible (baja rigidez), sometido a
una acción sísmica, se generan esfuerzos en sus elementos resistentes (vigas, muros y
columnas),
menores que las que se producen en un edificio rígido, pero sus
desplazamientos laterales son mayores. Un buen diseño implica otorgar a la estructura
dimensiones y armaduras adecuadas a sus elementos resistentes, con el objeto que los
desplazamientos laterales y los esfuerzos sean simultáneamente aceptables. El cuociente
altura del edificio/periodo fundamental de vibración, es un excelente indicador del nivel de
rigidez del edificio. Conforme a él, se puede decir que las estructuras flexibles presentan
valores en el rango entre 20 y 40 metros/segundo, entre 40 y 70 en edificios de rigidez
normal, y sobre 70 en los muy rígidos.
Es importante señalar que el análisis y diseño sísmico de una estructura no puede quedar
supeditado a la exclusiva aplicación de una norma, que sólo fija las disposiciones mínimas
que deberá respetar el profesional. La responsabilidad del ingeniero estructural no queda
limitada por los alcances normativos. Atendiendo a este hecho, es indispensable tener
DINAMICA DE ESTRUCTURAS – TOMÁS GUENDELMAN B
5
ACHISINA
presente que hay factores situados más allá de los reglamentos mínimos, que deberán
ser consultados en el proyecto. Entre éstos merecen especial mención la detección de los
mecanismos potenciales de falla (Vulnerabilidad Sísmica) y la evaluación de las
debilidades de la estructuración del edificio (Peligrosidad Estructural).
Con el propósito de detectar y de reducir razonablemente estos factores de riesgo, se
suele efectuar, además del análisis normativo, un estudio con registros de terremotos
reales. A pesar de que un terremoto en un determinado lugar tiene características que no
pueden trasladarse a otro, suelen emplearse sus datos para medir, en forma relativa, el
comportamiento que habría tenido una estructura, con referencia a otras, situadas en el
lugar siniestrado y que exhibieron diversidad de daños.
El 17 de enero de 1994 tuvo lugar en U.S.A. el terremoto de Northridge y, casualmente,
exactamente un año después, se registró el terremoto en Kobe, Japón. Ambos eventos
dañaron masivamente a las estructuras de esos lugares y crearon un razonable alarma
entre los profesionales vinculados al tema. A la fecha se han empleado los registros de
estos terremotos en algunos proyectos en ejecución en el país, lo que ha permitido
concluir que, pese a la severidad de tales eventos, nuestra modalidad de análisis y de
diseño permite evitar situaciones de extremo daño, o incluso de colapso. Esta
observación, sumada a numerosas razones adicionales que han prestigiado el así
llamado "modelo chileno", constituyen capacidades nominales de una estructura, que se
transforman en fortalezas reales, si el diseño se vuelca con igual celo en la
materialización e inspección de la obra.
1.3 VULNERABILIDAD SISMICA DE ESTRUCTURAS BAJAS
Las estructuras bajas corresponden a edificaciones de uno o dos pisos, destinadas a
viviendas individuales, pareadas o en serie. Habitualmente su esqueleto resistente está
compuesto por muros de hormigón, albañilería armada o reforzada, mampostería de
piedra, elementos de acero o madera, elementos prefabricados o combinaciones de los
materiales anteriores. El comportamiento y los daños observados en la experiencia
sísmica chilena obligan a excluir el adobe como material estructural, no obstante su
amplia utilización en viviendas rurales. La
relativamente alta rigidez de estas
construcciones se manifiesta mediante períodos de vibración muy bajos que se traduce
en altos porcentajes del peso sísmico como corte basal de diseño.
Las estructuras construidas en albañilerías o mampostería presentan un comportamiento
poco dúctil y por ello es baja su capacidad para liberar energía sísmica incursionando en
el rango plástico de los materiales. Por esta razón, la Norma Sísmica Chilena
NCh433.Of96 sólo permite aumentar en más de un 50% el factor R de modificación de la
respuesta cuando los muros de hormigón armado toman en cada piso más del 50% del
esfuerzo de corte del piso. Las dos características anteriores son especialmente
significativas de considerar para lograr un buen diseño. La albañilería es un material
DINAMICA DE ESTRUCTURAS – TOMÁS GUENDELMAN B
6
ACHISINA
estructural no homogéneo, formado por unidades de ladrillos o bloques adheridos con
mortero (mezcla de agua, arena, cemento y cal) y construida en forma manual por capas.
De esta forma, la estructura resultante tiene propiedades variables que dependen de la
calidad de su fabricación. Su característica principal es poseer una buena resistencia a la
compresión, pero muy baja a la tracción, debido a la debilidad de las uniones entre
unidades, que se demuestra en la práctica, pues generalmente los planos de ruptura
coinciden con las juntas verticales y horizontales de mortero. Para reforzar este tipo de
estructuras se emplean básicamente las siguientes estructuraciones:
•
•
•
Albañilería Confinada: el muro está enmarcado completamente por elementos
esbeltos de hormigón armado. Esta disposición proporciona cierta capacidad de
deformación más allá del rango elástico.
Albañilería Armada: se dispone armaduras vertical y horizontal en los huecos de
las unidades de albañilería y en las juntas horizontales de mortero. Para lograr un
buen comportamiento es indispensable que la estructura funcione
homogéneamente y para ello es imprescindible que no queden huecos en el
mortero, asegurando así la adherencia de las armaduras con la albañilería y el
adecuado desarrollo de longitudes de empalme y anclaje.
Albañilería de Doble Capa: la armadura se dispone vertical y horizontalmente en el
mortero ubicado entre capas de albañilería delgada.
Sólo cuando se dispone sistemas de pisos que actúan como diafragmas rígidos en su
plano, podemos considerar que la acción sísmica se distribuye en proporción a las
rigideces de los muros de la estructura. En caso contrario, cada elemento estructural debe
resistir separadamente la carga proveniente de su área de influencia y manifestar
seguridad contra el volcamiento. Conceptualmente, vulnerabilidad es un riesgo no
controlado. Los siguientes aspectos frecuentemente son algunas de estas situaciones,
que se han traducido en los daños observados en este tipo de estructuras:
•
•
•
•
•
•
•
•
•
•
•
•
•
•
Estudio de mecánica de suelos insuficiente o inexistente.
Fundaciones mal diseñadas.
Malas técnicas constructivas y/o defectos en la edificación.
Durabilidad e impermeabilización insuficientes.
Fallas en el control de calidad de los materiales.
Inspección técnica inadecuada.
Uso de productos prefabricados no completamente probados y/o mal montados.
Proyectos incompletos o inexistentes (auto construcción).
Incumplimiento de algunos aspectos de las Normas de diseño.
Torsión excesiva por mala estructuración.
Modelación inadecuada para el comportamiento de la estructura.
Falta de control de deformaciones.
Participación de calculistas con preparación insuficiente.
Inexistencia, hasta fecha reciente, de una revisión independiente del cálculo.
DINAMICA DE ESTRUCTURAS – TOMÁS GUENDELMAN B
7
ACHISINA
Considerando adecuadamente los aspectos señalados, este tipo de estructuras no
debiera agrietarse para cargas de servicio, presentar un comportamiento adecuado para
sismos moderados y no sufrir colapsos para eventos severos.
DINAMICA DE ESTRUCTURAS – TOMÁS GUENDELMAN B
8
ACHISINA
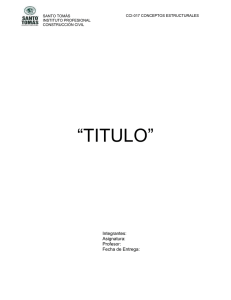
2 TIPOLOGIA ESTRUCTURAL
2.1 ESTRUCTURACION
Edificio de marcos rígidos
Edificio de Muros
Edificio Mixto (Marcos y
Muros)
Edificio con Asimetría
Traslacional
Edificio con Asimetría
Rotacional
2.2 FORMAS
Edificio Simétrico
DINAMICA DE ESTRUCTURAS – TOMÁS GUENDELMAN B
9
ACHISINA
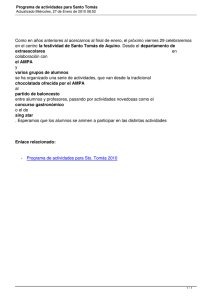
2.3 REGULARIDAD
Edificio Regular
Irregularidad de
Masas
Irregularidad de
Rigideces (Piso Blando)
Irregularidad de
Masas y de Rigideces
3 SISTEMAS LINEALES DE VARIOS GRADOS DE LIBERTAD
3.1 ECUACION GENERAL DEL MOVIMIENTO
[Μ ] { y(t )}
+
[C] { y(t )}
+
[Κ ] { y(t )}
=
{ P(t )}
3.2 VIBRACIONES LIBRES NO AMORTIGUADAS
Con el objeto de resolver la ecuación del movimiento, es conveniente analizar
previamente el caso de vibraciones libres no amortiguadas, dado por:
[Μ]{y (t )} + [Κ ]{y (t )} = {0}
Suponiendo una solución de la forma
{y (t )} = {φ}(Α sen ωt
+
Β cos ωt )
y sustituyendo, se obtiene:
{− ω [Μ]{φ} + [Κ ]{φ}}(Α sen ωt + Β cos ωt ) = {0}
2
DINAMICA DE ESTRUCTURAS – TOMÁS GUENDELMAN B
10
ACHISINA
la que se satisface, para todo instante de tiempo, si:
− ω2 [Μ ]{φ} +
[Κ ]{φ} = {0}
La solución trivial {φ}={0} carece de interés, no así la solución no trivial, que corresponde
a:
(
det − ω2 [Μ ]
[Κ ])
+
=
0
Esta ecuación representa una expansión polinómica de grado n en ω2, denominada
Ecuación Característica. Posee n raíces reales positivas de ωi2 . Los valores ωi se
denominan Frecuencias Naturales de Vibración y los valores Τi = 2 π / ωi son los
denominados Períodos Naturales de Vibración. Para cada valor ωi, existe un vector {φi}
asociado, denominado Forma Modal de Vibración. Las Frecuencias, Períodos y Formas
Modales de Vibración, en conjunto, constituyen lo que se denomina Valores y Vectores
Propios. Para determinar los valores y vectores propios de orden i, se establece la
ecuación:
[− ω [Μ] + [Κ ]]{φ } = {0},
2
i
[
i
]
y dado que el determinante de − ωi2 [Μ ]+[Κ ] es nulo, las ecuaciones simultáneas en
términos de {φi} son linealmente dependientes. Esta situación significa que solamente
pueden obtenerse los valores relativos entre las componentes, lo que se alcanza
asignando un valor arbitrario a una componente cualesquiera de {φi} y luego resolviendo
las n-1 ecuaciones simultáneas restantes.
Una importante propiedad del vector {φi} consiste en su ortogonalidad con respecto a las
matrices [Μ] y [Κ]. Por ejemplo, si se escribe la ecuación anterior para los conjuntos
ωi,{φi} y ωj,{φj}, se tiene:
[Κ ]{φi } =
ωi2 [Μ ]{φi }
[Κ ]{φ j } =
ω2j [Μ ]{φ j }
Premultiplicando por {φj}T la primera y por {φi}T la segunda, y posteriormente restando, se
tiene:
{φ j }Τ [Κ ]{φi } − {φi }Τ [Κ ]{φ j } = ωi2 {φ j }Τ [Μ]{φi }− ω2j {φi }Τ [Μ]{φ j }
DINAMICA DE ESTRUCTURAS – TOMÁS GUENDELMAN B
11
ACHISINA
de donde se obtiene:
(ω
2
i
)
− ω2j {φ j }Τ [Μ ]{φi } = 0
lo que significa que:
⎧0
{φ } [Μ]{φ } = ⎨Μ
Τ
j
i
{φ j }Τ [Κ ]{φi }
⎩
=
i
⎧0
⎨ 2
⎩ω1 Μ i
;
j ≠ i
;
j = i
;
j
≠ i
;
j
= i
Estas expresiones representan las condiciones modales de ortogonalidad. Si se construye
una matriz cuadrada cuya columna de orden j contenga las componentes de
{φ } , se
j
genera la matriz [φ] , denominada Matriz Modal, que permite describir las relaciones
generales de ortogonalidad. Matricialmente se tiene:
[φ]Τ [Μ][φ] = [ diag Μ ]
[φ]Τ [Κ ][φ] = [diag Κ ] = [diag Μ ][diagω2 ]
Si la matriz de amortiguamiento tiene las expresiones debidas a Caughy, entonces
también se verifica que:
[φ]Τ [C ][φ] = [diagC ] =
2[diag Μ ][diagλ ][diagω]
Como se recordará, las componentes de los vectores modales son relativas entre si, lo
que permite fijar cualesquiera de ellas, con valor arbitrario. Es usual y muy conveniente
escalar las formas modales de modo que la matriz diag Μ sea la matriz identidad. En
esta forma, las expresiones de ortogonalidad se pueden escribir como:
[
]
[φ]Τ [Μ][φ] = [Ι]
[φ]Τ [Κ ][φ] =
[diagω ]
2
DINAMICA DE ESTRUCTURAS – TOMÁS GUENDELMAN B
12
ACHISINA
[φ]Τ [C ][φ]
=
2[diag λ ][diag ω]
En general no se emplea la ecuación característica en la determinación de valores y
vectores propios, por diversas razones de tipo numérico. Los métodos más convenientes
son los de Jacobi, Housholder, Stodola-Vianello, entre otros.
3.3 VIBRACIONES FORZADAS
Resuelto el problema de vibraciones libres, se procede a encontrar la solución de la
ecuación general del movimiento. Para ello, desarrollando en serie y(t) mediante
armónicas de los modos de vibrar, se puede escribir:
{y (t )} = {φ1 }η1 (t )
{φ2 }η2 (t )
+
+ …
{φn }ηn (t )
Si se admite que la matriz de amortiguamiento [C] también sea ortogonalizada por los
modos de vibrar, se puede reemplazar la expansión en serie de y(t) y premultiplicar por
{φi}t, lo que origina que se anulen todos los términos, salvo el orden ″i″. En esta forma, el
sistema de ecuaciones original se transforma en ″n″ ecuaciones independientes de 1
grado de libertad. La ecuación de orden ″i″, con modos normalizados, es:
ηi
+
2λi ω iη i
+ ω i2η i
=
{φi }Τ {Ρ(t )}
que para condiciones iniciales de reposo conduce a:
η i (t ) =
{φi }Τ
∫ο {Ρ(τ )}e
t
ω di
− λiωi (t −τ )
senω Di (t − τ )dτ
donde:
ωDi
= ωi 1 − λ2i
ηi ( t ) se puede obtener por integración numérica. Los desplazamientos {y} se obtienen de
la expansión original:
{y (t )} = {φ1}η1(t )
+
{φ2 }η2 (t )
+ …
si se designa
{y j (t )} = {φ j }η j (t )
Entonces
{y (t )} = {y1 (t )} + {y 2 (t )} +
{φn }ηn (t )
+
{y n (t )}
DINAMICA DE ESTRUCTURAS – TOMÁS GUENDELMAN B
13
ACHISINA
{y j (t )} corresponde a la componente modal de orden j de los desplazamientos {y (t )}.
3.4 SOLICITACION SISMICA
La acción sísmica consiste en la imposición de desplazamientos en la base de la
estructura, por lo tanto, la ecuación del movimiento queda dada por:
[Μ]{ yΤ } + [C]{ y} + [Κ]{ y} = {0}
{ yΤ } =
{ y} =
Desplazamientos totales
Desplazamientos relativos a la base
{ yΤ } e { y} están vinculados por la relación
{y Τ }={y}+[G ]{u g }, donde {u g } es el
vector de componentes independientes del movimiento sísmico. La matriz [G ] se
construye de acuerdo a las relaciones geométricas entre las masas y el suelo, lo que se
aprecia en el ejemplo siguiente, en el que se representa la acción de un sismo horizontal
ug .
y1
y2
yΤ1
1
+ ug x
1
=
yΤ2
+ ug = 1
⎧1⎫
⎧ y1 ⎫
⎧ yΤ 1 ⎫
⎨ ⎬ = ⎨ ⎬ + ⎨ ⎬ ug
⎩1⎭
⎩ y2 ⎭
⎩ yΤ 2 ⎭
Sustituyendo esta relación en la ecuación del movimiento se tiene:
DINAMICA DE ESTRUCTURAS – TOMÁS GUENDELMAN B
14
ACHISINA
[Μ]{ y} + [C]{ y} + [Κ ]{ y} =
⎧1⎫
− [Μ ] ⎨ ⎬ug =
⎩1⎭
{Ρ (t )}
eff
Ecuación que es idéntica a la de vibraciones forzadas.
4 ANALISIS SISMICO DE EDIFICIOS
METODO DINAMICO MODAL ESPECTRAL
4.1 ECUACION DIFERENCIAL DEL MOVIMIENTO
Aplicando los conceptos de las secciones anteriores, es posible extender el análisis
sísmico a edificios, entendidos como sistemas particulares de varios grados de libertad,
que caracterizan soluciones estructurales conformadas por ejes resistentes situados en
planos verticales, conectados entre sí por diafragmas horizontales (losas de piso),
generalmente concebidas como elementos sólo de distribución de esfuerzos, con
características de indeformabilidad en su propio plano.
Siguiendo las mismas etapas del desarrollo de la sección anterior, se puede escribir:
[Μ ]{q} + [C ]{q} + [Κ ]{q} =
{q} :
− [Μ ]{Gκ }q g (t ) = Qef (t )
vector de desplazamientos relativos. Se supondrá que corresponde a
traslaciones según x (u), según y (v) y rotaciones en planta de las losas de los
pisos (θ), que se organiza en la forma:
{q}T = u1u 2 ....u n v1v 2 ...v n θ1θ 2 ...θ n
Los pisos se enumeran de arriba hacia abajo.
El significado de los términos que aparecen en la ecuación del movimiento es el siguiente:
n
: número de pisos del edificio
q g (t ) : registro de aceleraciones sísmicas en la base de la estructura
DINAMICA DE ESTRUCTURAS – TOMÁS GUENDELMAN B
15
ACHISINA
[Μ ]
: matriz de masas del edificio.
[C ]
: matriz de amortiguamiento viscoso equivalente.
[Κ ]
: matriz de rigidez del edificio.
{Gκ } : matriz de transformación de desplazamientos para sismo en dirección ″κ″.
{Gx} =
1
1
1
0
0
0
0
0
0
{G } = 0
0
0
1
1
1
0
0
0
y
Τ
Τ
4.2 METODO DE SUPERPOSICION MODAL ESPECTRAL
Transformación de coordenadas: {q} = [Φ ]{η}
En que:
{η}
: Vector de coordenadas normales.
[Φ]
: Matriz modal del sistema no amortiguado: [{φ1}{φ2 }{φ3 }
{φn }]
Si se acepta la ortogonalidad entre [M], [C], [K] con [Φ] y que los modos están
normalizados, la ecuación diferencial para la coordenada normal ″i″ queda dada por:
ηi
+
2λi ω iη i
+ ω i2η i
= Qef −i
Μ *i
=
{φ i } Τ [Μ ] {φ i }
…
= − {φi } [Μ ]{Gk }q g (t )
Τ
masa generalizada de orden "i"
La solución de esta ecuación es:
DINAMICA DE ESTRUCTURAS – TOMÁS GUENDELMAN B
16
ACHISINA
η i (t ) =
−1
ω Di
{φi }Τ [Μ ]{Gκ }∫ο q g (τ )e −λ ω (t −τ ) senω D i (t − τ )dτ
t
i
i
En que:
λi
:
Porcentaje de amortiguamiento
amortiguamiento crítico.
ωi
:
Frecuencia natural del modo ″i″.
ω Di
:
del
Frecuencia amortiguada del modo " i"
modo
= ωi
" i"
con
respecto
al
(1 − λ )
2
i
4.3 RESULTADOS MODALES Y COMBINADOS
Conforme a lo estudiado para los sistemas de 1 grado de libertad se tiene:
η i − x max
ηi − y max
=
=
{φi }T [Μ ] {G x }
ω i2
{φi }Τ [Μ ] {Gy }
ωi2
S ai …. Para sismo “x”
S ai …. Para sismo “y”
en que Sai es la ordenada espectral de pseudo aceleraciones para el modo "i".
a) Desplazamientos modales
{qi }
:
Contribución del modo ″i″ en {q}
Valores máximos de esta contribución:
{qi }x −max ={φi }η i − x max …. Para sismo “x”
{qi }y −max ={φi }η i − y max …. Para sismo “y”
b) Solicitaciones modales
{Qi }k −m: Contribución del modo ″i″ al vector de solicitaciones modales, para sismo en
dirección κ.. Los valores máximos de esta contribución son:
DINAMICA DE ESTRUCTURAS – TOMÁS GUENDELMAN B
17
ACHISINA
[Κ ]{φi }η i − xmax …. Para sismo “x”
= [Κ ]{φi }η i − y max …. Para sismo “y”
{Qi }x −max
{Qi }y −max
=
c) Esfuerzos de cortes basales modales
V i −κ
Μ eqi −κ
Contribución del modo ″i″ al esfuerzo de corte basal, para sismo en dirección
κ. Los valores máximos de esta contribución son:
:
:
V i − x max
= Μ eqi − x S ai …. Para sismo “x”
V i − y max
= Μ eqi − y S ai …. Para sismo “y”
Masa equivalente modo ″i″, dirección κ
.
Desarrollando las ecuaciones anteriores se observa que:
=(∑ m j φi , j ) ; Μ eqi − y
2
Μ eqi − x
(∑ m φ )
2
=
j i, j
j =1, n
j = n +1, 2n
Lo que origina que Μ eqi − k = Γi2− k , para k=x y k=y
d) Combinación de respuestas modales según CQC
=
S
ρij
=
⎛
⎜∑
⎝ i =1,n
⎞
∑ ρ S S ⎟⎠
j =1, n
ij
i
j
8λ2 t 3 2
(1 + t ) (1 − t )2
+ 4λ2 t (1 + t )
donde:
S
Si
Sj
ρij
t
λ
:
:
:
respuesta combinada de cualquier parámetro.
contribución del modo i, con su signo.
contribución del modo j, con su signo
:
coeficiente de acoplamiento modal
:
:
cuociente de los períodos de los modos i y j.
razón de amortiguamiento con respecto al crítico. Se supone que su
valor es el mismo para todos los modos.
DINAMICA DE ESTRUCTURAS – TOMÁS GUENDELMAN B
18
ACHISINA
La Norma chilena NCh433.Of96 establece un amortiguamiento modal uniforme de 5% y
fija un número de modos tal que la suma de masas modales equivalentes sea mayor o
igual al 90% de la masa total del edificio.
4.4 Efectos indirectos
En estructuras asimétricas se produce acoplamiento de las traslaciones entre sí, o de
éstas con las rotaciones, lo que provoca esfuerzos que denominaremos indirectos.
A modo de ejemplo, consideremos los esfuerzos de corte que se originan en la dirección
perpendicular a la solicitación. Siguiendo el procedimiento antes descrito para medir
efectos directos, podemos deducir que:
⎞
⎞⎛ n
⎛ n
Viymax = ⎜⎜ ∑ m jφi , j + n ⎟⎟ ⎜⎜ ∑ m jφi , j ⎟⎟ S ai
⎠
⎠ ⎝ j =1
⎝ j =1
M xy
Siendo Mxy , la masa equivalente en y para un sismo x, en el modo i. Por la naturaleza de
esta masa se le denomina “ masa acoplada”.
Por simple inspección se observa que, para modos normalizados:
M yx = M xy = Γx Γy
2
⎛ n
⎞
M yy = ⎜⎜ ∑ m jφi , j + n ⎟⎟ S ai = Γy2
⎝ j =1
⎠
⎡ M xx
∴ M eq = ⎢
2x2
⎣ M yx
[
]
M xy ⎤
M yy ⎥⎦
Gráficamente, éste es un tensor que se puede representar a través del Círculo de Mohr,
como se muestra en la figura, y de ahí se desprende la presencia de un ángulo modal
crítico “α”, que se puede definir como aquel para el cual las masas equivalentes se
desacoplan.
DINAMICA DE ESTRUCTURAS – TOMÁS GUENDELMAN B
19
ACHISINA
(Md1 , Macp)
2α
M22
M11
(Md2 , Macp)
Al ser α un ángulo diferente para cada modo, no es posible hablar de una dirección crítica
“químicamente pura” para la acción sísmica completa. Sin embargo, con esta información
modal, el ingeniero puede discernir respecto del ángulo crítico que estima razonable
utilizar en su proyecto.
El análisis en un ángulo α, complementario con otro en un ángulo β, desfasado en 90
grados respecto de α, se presenta a continuación:
{Gα }T =< cos α cos α ... | senα senα ... | 000... >
y
Sα
Sβ
de donde se obtiene que:
α
Γα i = cos α Γxi + senα Γyi
x
Γβ i = − senα Γxi + cos α Γyi
El desarrollo de las ecuaciones para las solicitaciones sísmicas según α y β, conducen a
las siguientes masas equivalentes directas:
M αα I = Γα2i = cos 2 α M xxi + sen 2α M yyi + sen2α M xyi
M ββ I = Γβ2i = sen 2α M xxi + cos 2 α M yyi − sen2α M xyi
Nótese que M αα I + M ββ I = M xxi + M yyi (invariante)
DINAMICA DE ESTRUCTURAS – TOMÁS GUENDELMAN B
20
ACHISINA
Las masas acopladas indirectas, por su parte, son:
M αβ I = Γαi Γβi = (cos α Γxi + senα Γyi )(− senα Γxi + cos α Γyi ) = M βαi
que se transforma en:
M αβ I =
(
)
1
sen 2α M yyii − M xxii + cos 2α M xyi
2
Para la condición crítica, se requiere que Mαβi sea nulo, con lo que se obtiene:
tg 2α =
2 M xyi
M xxi − M yyi
que nuevamente conduce al Círculo de Mohr
Como se puede apreciar, una vez realizado el análisis según dos direcciones mutuamente
ortogonales x e y, se puede encontrar la solución del análisis para otras dos direcciones
α,β, a través de las ecuaciones de transformación precedentes.
4.5 Propiedades de las masas equivalentes
La masa equivalente acoplada Mxyi está dada por la expresión matricial siguiente:
DINAMICA DE ESTRUCTURAS – TOMÁS GUENDELMAN B
21
ACHISINA
M xyi = {I x }t [M ]{φi }{φ i }t [M ]{I y }
En que:
x :
y :
i :
n :
{Ix} :
{Iy} :
{φi} :
[M] :
dirección de la acción sísmica
dirección sísmica en la que se mide el corte basal
número del modo de vibrar
Número de pisos del edificio
vector de 3n componentes. Las asociadas a x tienen valor unitario y las
restantes son nulas.
vector de 3n componentes. Las asociadas a y tienen valor unitario y las
restantes son nulas.
vector de forma modal de orden i de 3n componentes.
matriz de masas del edificio de 3n*3n
El modo de vibrar {φi} se puede expresar como:
{φi } = [Φ ]{a i }
en que:
{ai}
:
vector de 3n componentes cuyo único término no nulo, e igual a la unidad, es el
de orden i.
[Φ]
:
matriz de 3n*3n cuyas columnas son los diferentes vectores de formas modales
Sustituyendo esta expresión en la de la masa modal se tiene:
M xyi = {I x }t [M ][Φ ]{ai }{ai }t [Φ ] [M ]{I y }
t
Sumando todas las masas equivalentes desde i=1 a i=3n, se tiene:
ΣM xyi = {I x }t [M ][Φ ](Σ{a i }{a i }t )[Φ ] [M ]{I y }
t
Se puede observar que el producto {ai}{ai}t origina una matriz de 3n*3n términos, cuyo
único término no nulo, e igual a 1, es el i,i. Al sumar todos estos productos se obtiene la
matriz identidad.
DINAMICA DE ESTRUCTURAS – TOMÁS GUENDELMAN B
22
ACHISINA
Por lo tanto:
ΣM xyi = {I x }t [M ][Φ ][Φ ] [M ]{I y }
t
Por otra parte, la condición de ortogonalidad de la matriz modal respecto de la matriz de
masas queda dada por:
[Φ ]t [M ][Φ ] = [I ]
por lo tanto, si se premultiplica por la inversa de [Φ]t y se posmultiplica por la inversa de
[Φ] se tiene:
[M ] = [Φ t ]−1 [Φ ]−1
o lo que es lo mismo:
[Φ ][Φ ]t = [M ]−1
de modo que:
ΣM xyi = {I x }t [M ][M ] [M ]{I y }
−1
es decir:
ΣM xyi = {I x }t [M ]{I y }
De esta expresión se deduce que:
a) La suma de las masas modales directas es igual a la masa total del edificio (x = y)
b) La suma de las masas modales acopladas es igual a cero (x ≠ y)
Estas propiedades de las masas equivalentes son muy importantes para el análisis
sísmico de edificios, en que se suele truncar el número de modos de vibración. Al hacer
efectiva la truncación modal, es importante acumular masas equivalentes significativas,
por ejemplo mayores al 90% de la masa total.
DINAMICA DE ESTRUCTURAS – TOMÁS GUENDELMAN B
23
ACHISINA
5 MATRICES DE AMORTIGUAMIENTO, MASAS Y RIGIDEZ DE
EDIFICIOS
5.1 MATRICES DE AMORTIGUAMIENTO Y MASAS
Si el efecto del amortiguamiento se incorpora en cada modo a través de la respectiva
razón de amortiguamiento, no es necesario definir una matriz explícita.
Si se acepta la hipótesis de que las losas constituyen diafragmas rígidos y que en ellas se
concentran las masas del edificio, en sus respectivos centros de gravedad, la matriz de
masas del edificio completo resulta diagonal, lo que origina un beneficio muy importante,
no sólo con lo que ello implica en términos del consumo de tiempo en computador, sino
que además, simplifica la revisión de las prescripciones normativas relacionadas con los
desplazamientos de los centros de gravedad de los pisos.
En estas condiciones, la matriz de masas del edificio queda dada por:
⎡m1
⎢
⎢
⎢
⎢
⎢
⎢
⎢
[Μ]= ⎢⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎣⎢
m2
mn
m1
m2
mn
J1
J2
⎤
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
J n ⎦⎥
En esta expresión, los valores mi corresponden a la masa total del piso “i”, al tanto que los
Ji representan los momentos de inercia polar de las masas de los pisos con respecto a un eje
vertical a las losas que pasa por sus respectivos centros de gravedad. Es importante
recordar que esta forma de la matriz está asociada a una organización de grados de libertad
del tipo:
DINAMICA DE ESTRUCTURAS – TOMÁS GUENDELMAN B
24
ACHISINA
{q}Τ =< u1 u 2 …u n v1 v2 …v n θ1θ 2 …θ n >
donde los subíndices corresponden a una numeración de pisos que comienza en el nivel
superior del edificio.
5.2 MATRIZ DE RIGIDEZ
Estudiaremos tres modelos para representar un edificio:
•
•
•
Modelos pseudo tridimensionales.
Modelos con compatibilidad vertical.
Diafragmas deformables asimilables a eslabones rígidos conectados entre si por
elementos de enlace flexibles.
La aplicación de los conceptos que se emplearán en estos tres casos, permiten el
desarrollo de modelamientos más sofisticados, en los que no sea necesario admitir la
indeformabilidad del diafragma ni ignorar las rigideces laterales y torsionales de los
elementos resistentes.
MODELO PSEUDO TRIDIMENSIONAL
Eje resistente
vertical
MODELO CON COMPATIBILIDAD VERTICAL
Compatibilidad
vertical
DINAMICA DE ESTRUCTURAS – TOMÁS GUENDELMAN B
25
ACHISINA
MODELO CON DIAFRAGMA DEFORMABLE (caso elementos de enlace)
Barra Flexible en
Plano Horizontal
5.2.1 Modelo Pseudo Tridimensional
Vi
Y
Yi , vi
Pij , pij
Wi
P1j
p1j
P2j
p2j
Pnj
pnj
B
Rij
αj
A
X i , ui
Gi
θi
Ui
A
B
X
Nivel i
Elevación elemento resistente j
Figura 1
Figura 2
DINAMICA DE ESTRUCTURAS – TOMÁS GUENDELMAN B
26
ACHISINA
{q}T = u1u2
{Q}T = U1U 2
un v1v2
vn θ1θ 2
θn
U n V1V2
Vn W1W2
Wn
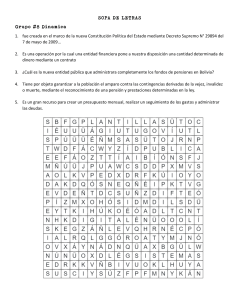
La figura 1 muestra el nivel i de un edificio de n pisos, el contorno del diafragma rígido
(losa), la traza del elemento resistente vertical j, el sistema global de coordenadas X e Y,
el sistema local de coordenadas Xi e Yi, el punto de referencia Gi del sistema coordenado
local, las solicitaciones externas en el nivel i aplicadas en Gi, que designamos Ui, Vi, Wi,
los desplazamientos del diafragma en su propio plano ui, vi, θi, el desplazamiento pij del
elemento j en el nivel i contenido en el plano del elemento resistente, la solicitación Pij que
tributa sobre este elemento resistente y las coordenadas polares Rij, αj de la traza del
elemento resistente.
Gi puede variar de piso en piso, lo que explica la existencia del subíndice i en la
coordenada polar Rij. Al ser paralelos los sistemas locales de cada piso con el sistema
global, la coordenada polar αj no requiere el subíndice i.
Ejemplos:
Ejemplo 1
Yi
pij
Yi
⎫
esta convención ⎪⎪
⎬⇒
de signos positivos ⎪
⎪⎭
resulta
Si se desea
40º
Gi
Xi
0
R = 10
α = 40º
Xi
DINAMICA DE ESTRUCTURAS – TOMÁS GUENDELMAN B
27
ACHISINA
Ejemplo 2: Cambio de la dirección positiva de la fuerza
Yi
R = -10
α = 220º (180 + 40)
Xi
Gi
Yi
220º
Gi
Xi
Ejemplo 3
Yi
Gi
1
α
1
−7
0
2
3
−4
5
0
0
Xi
3
2
3
Eje Ri
4
5
DINAMICA DE ESTRUCTURAS – TOMÁS GUENDELMAN B
28
ACHISINA
Ejemplo 4
Eje
Ri
α
1
−6
0
7
2
3
0 30 *
5 0
4
4
5
−7 270º
4 270º
Yi
4
30º
Gi
1
3
2
Xi
5
6
* Si se invierte la convención :
R = 0 y α = 210º
5
El elemento resistente j posee una matriz de rigidez que incluye los desplazamientos
horizontales, verticales y de giro de cada uno de sus nudos. Los grados de libertad de
borde son los que están contenidos en el diafragma, es decir, los horizontales. Para
acciones exclusivamente horizontales sobre el edificio (sismo o viento), la relación de
rigidez para el marco se reduce a:
{P } = [K ]{p }
j
j
j
La matriz [Kj] representa la condensación estática y geométrica de la matriz de rigidez del
marco, a los grados de libertad horizontales del diafragma. Por este motivo se denomina
Matriz de Rigidez Horizontal del marco j.
Condensación
Estática
Condensación
Geométrica
Una vez definidos los grados de libertad de borde de la componente j debemos
relacionarlos con los grados de libertad de borde del edificio (vector {q}).
DINAMICA DE ESTRUCTURAS – TOMÁS GUENDELMAN B
29
ACHISINA
Para el piso “i”:
La relación geométrica para el nivel i es: pij = − sen α j ui
+ cos α j vi
+
Rij θ i
DINAMICA DE ESTRUCTURAS – TOMÁS GUENDELMAN B
30
ACHISINA
Generalizando para todos los pisos:
{p} j = [− senα j [I ] cos α j [I ] [R j ]] { q}
[β ]
( n×1)
j
(3n×1)
(nx 3 n )
Desarrollando explícitamente esta ecuación para todos los piso, tendremos:
{p} j = [− senα j [I ] cos α j [I ] [R j ]] { q}
( n×1)
[β ]
j
(3n×1)
(nx 3n )
Las ecuaciones de equilibrio en los grados de libertad del nivel i son:
Ui* =
Pij senαj
Vi* = - Pij cosαj
Wi* = - Pij Rij
Acciones U, V y W tienen signo
contrario
Por lo tanto, la contribución del
elemento j en el vector {Q} es:
{Q } = [β ] {P }
j T
j
j
Sumando para todas las componentes se obtiene finalmente:
{Q} = ⎢∑ [β j ]T [K j ][β j ]⎥{q}
⎡m
j
⎣ j =1
⎤
⎦
⎡
⎢⎣
K
⎤
c ⎥⎦
DINAMICA DE ESTRUCTURAS – TOMÁS GUENDELMAN B
31
ACHISINA
Desarrollando el triple producto matricial se obtiene:
⎡
⎢
⎢
Kj = ⎢
⎢
⎢
⎣
−1
sen 2α j [k ] j
2
cos 2 α j [k ] j
sen 2α j [k ] j
[ ]
⎤
− senα j [k ] j [R ] j ⎥
⎥
cos α j [k ] j [R ] j ⎥
⎥
[R] j [k ] j [R ] j ⎥
⎦
La matriz [K c ] se suele denominar Matriz de Rigidez de Diafragma del edificio.
5.2.2 Modelo Pseudo Tridimensional Monolítico
Este modelo se comenzó a aplicar desde mediados del los años 60 como consecuencia
del aumento de capacidades de los computadores de la época. El monolitismo estructural
era representado a través de alas colaborantes en la sección de los elementos, primando
en general el concepto de considerar seis espesores de ala, hacia cada lado del alma de
la sección.
PLANTA:
ACCION SISMICA
6e
e
e
6e
6e
Esta hipótesis sufrió numerosos cambios y perfeccionamientos, pero algunos problemas
quedaron definitivamente mal resueltos, siendo necesario modificar el método pseudotridimensional por la vía de considerar el monolitismo estructural mediante compatibilidad
de desplazamientos verticales en las aristas comunes de elementos planos concurrentes.
DINAMICA DE ESTRUCTURAS – TOMÁS GUENDELMAN B
32
ACHISINA
Los siguiente ejemplos ilustran algunos casos en que la técnica pseudo tridimensional no
es correcta.
c
t
v
d
d
e
u
Px
h
c
Sección típica
de todos los eje.
a
b
a
Usando el Modelo Pseudo Tridimensional, la estructura se representa de la siguiente
manera:
− ocho ejes independientes
− I, A, κ : se obtienen de la sección
con alas colaborantes.
El modelo pseudo tridimensional revelaría doble simetría, lo que se traduce en
desplazamientos de diafragma sólo en la dirección en que están aplicadas las
solicitaciones. Sin embargo, si observamos lo que ocurre en el modelo monolítico al
aplicar una carga Px, éste revela que junto a los desplazamientos u se producen
desplazamientos v. Este es un ejemplo típico de acoplamiento traslacional.
Si las secciones L´s fueran regulares en toda la altura del edificio, el modelo pseudo
tridimensional compuesto por ocho ejes resistentes independientes, según los planos
principales de inercia de la sección, representarían adecuadamente al edificio.
DINAMICA DE ESTRUCTURAS – TOMÁS GUENDELMAN B
33
ACHISINA
Si tal regularidad no existe, los ejes principales de inercia cambiarían de piso a piso y el
modelo violaría la premisa inicial que establece elementos resistentes contenidos en
planos verticales.
Para otra disposición de los muros L se tiene:
v
Px
u
θ
Siguiendo un análisis similar para la estructuración de la figura, observamos que se
produce acoplamiento traslación-rotación, hecho que no quedaría en evidencia con el
modelo pseudo tridimensional, salvo que se empleen ejes ubicados según los planos
principales de inercia.
La solución más conveniente del problema se obtiene definiendo grados de libertad de
borde en las aristas de elementos concurrentes, como se ilustra en la figura siguiente:
DINAMICA DE ESTRUCTURAS – TOMÁS GUENDELMAN B
34
ACHISINA
ELEVACION
PLANTA
5
B
MODELO
t11
5
C
y
x
A
p11
t21
p21
3
3
p31
D
A
Piso 3
A
B
B
Eje 1
B′
t12
C′
B
C
A
D
Pisos 1 y 2
p12
t22
p22
p32
D
C
D
Eje 2
Nivel 1
C
t13
t33
t23
t43
Piso 3
Nivel 2
Piso 2
Nivel 3
p13
p23
p33
Piso 1
B B′ C′ C
Eje 3
B B′
C′ C
DINAMICA DE ESTRUCTURAS – TOMÁS GUENDELMAN B
35
ACHISINA
Eje
1
R
−5
α
0
2
5
0
3
−3 270º
Observar la correspondencia que debe existir entre las orientaciones de las elevaciones
de los ejes resistentes y las coordenadas polares de la traza del mismo eje.
Definición de los grados de libertad de borde del edificio:
Ψ1
v1
θ1
Ψ3
u1
Nivel 1
Ψ2
v2
θ2
u2
Nivel 2
v3
θ3
u3
Ψ4
⎧ u1 ⎫
⎧U1 ⎫
⎪u ⎪
⎪U ⎪
⎪ 2⎪
⎪ 2⎪
⎪ u3 ⎪
⎪U 3 ⎪
⎪ ⎪
⎪ ⎪
⎪ V1 ⎪
⎪ v1 ⎪
⎪V2 ⎪
⎪ v2 ⎪
⎪ ⎪
⎪ ⎪
⎪ v3 ⎪
⎪ V3 ⎪
⎧ q ⎫ ⎪ ⎪ ⎧Q ⎫ ⎪ ⎪
⎨ ⎬ = ⎨ θ1 ⎬;⎨ ⎬ = ⎨W1 ⎬
⎩ψ ⎭ ⎪ ⎪ ⎩ 0 ⎭ ⎪ ⎪
θ
W
(13×1)
⎪ 2 ⎪ (13×1) ⎪ 2 ⎪
⎪W3 ⎪
⎪θ 3 ⎪
⎪ ⎪
⎪ψ ⎪
⎪0⎪
⎪ 1⎪
⎪0⎪
⎪ψ 2 ⎪
⎪ ⎪
⎪ ⎪
⎪0⎪
⎪ψ 3 ⎪
⎪⎩ 0 ⎪⎭
⎪⎩ψ 4 ⎪⎭
Nivel 3
⎧ Q⎫
⎩ 0⎭
Las solicitaciones asociadas a estos grados de libertad de borde son: ⎨ ⎬
DINAMICA DE ESTRUCTURAS – TOMÁS GUENDELMAN B
36
ACHISINA
Generalizando lo anterior, se tiene:
t1j
t2j
Yi , vi
P1j
t3j
t4j
P2j
Pij , pij
θi
αj
Gi
tkj
pnj
B
Xi , ui
Rij
A
B
Elevación elemento resistente j
A
elemento
resistente j
qT
ψ T = u1u 2
un
v1v 2
vn
θ1θ 2
θ n ψ 1ψ 2
ψ
= Número de compatibilidades verticales
n = Número de niveles
m = Número de elementos resistentes
QT
0 = U 1U 2
U n V1V2
Vn W1W2
Wn
00
0
La agrupación de todos los grados de libertad verticales ( en total), constituye el vector
T
ψ .
En consecuencia, los grados de libertad de borde de toda la estructura se acumulan en un
⎧q ⎫
⎬
⎩ ψ ⎭( 3n + )×1
vector ⎨
Las relaciones de constitutividad para el elemento resistente j, una vez condensados los
grados de libertad internos, las escribimos en forma particionada de modo tal de
DINAMICA DE ESTRUCTURAS – TOMÁS GUENDELMAN B
37
ACHISINA
compactar los movimientos horizontales y poner a continuación los verticales de
compatibilidad. Esta relación la podemos escribir en la forma:
⎪⎧ Pj ⎪⎫ ⎡ K j C j ⎤ ⎪⎧ p j ⎪⎫
⎨ ⎬ = ⎢C T D ⎥ ⎨ ⎬
⎪t j ⎭⎪
j ⎦⎩
⎩⎪Tj ⎭⎪ ⎣ j
Pj , pj consideran las fuerzas y desplazamientos horizontales del elemento j.
Tj , tj consideran fuerzas y desplazamientos verticales del elemento j.
Las ecuaciones de compatibilidad geométrica implican la relación entre p, t con q y ψ.
Entre p y q rige la misma matriz [β] del modelo pseudo-tridimensional y entre t y ψ una
relación booleana ([B]) debido a que t es un subconjunto de ψ. No existe acoplamiento
explícito en esta relación. La ecuación de compatibilidad es:
⎧⎪ p j ⎫⎪ ⎡[β] j [0] ⎤ ⎧⎪ q ⎫⎪
⎨t ⎬ = ⎢ 0
[ ] [ B] j ⎥⎥⎦⎨⎪⎩ψ ⎬⎪⎭
⎩⎪ j ⎭⎪ ⎢⎣
[β' ] j
[β ] = ⎢⎢( [0] )
⎡ − sen α j
'
j
⎣
[I ]
(cos α ) [ I ] [ R]
[0]
j
[0]
j
[0] ⎤
⎥
[ B] j ⎥⎦
{ p} j = [β] j {q}
{t} j = [ B] j {ψ}
Para el ejemplo anterior determinaremos las distintas matrices [B]j:
Eje 1:
⎧ψ 1 ⎫
⎪ ⎪
⎧t11 ⎫ ⎡1 0 0 0⎤⎪ψ 2 ⎪
⎨ ⎬=⎢
⎥⎨ ⎬
⎩t 21 ⎭ ⎣0 1 0 0⎦⎪ψ 3 ⎪
⎪⎩ψ 4 ⎪⎭
⎡
⎤
⎢⎣ B1 ⎥⎦
DINAMICA DE ESTRUCTURAS – TOMÁS GUENDELMAN B
38
ACHISINA
Eje 2:
⎧ψ 1 ⎫
⎪ ⎪
⎧t12 ⎫ ⎡0 0 1 0⎤⎪ψ 2 ⎪
⎨ ⎬=⎢
⎥⎨ ⎬
⎩t 22 ⎭ ⎣0 0 0 1⎦⎪ψ 3 ⎪
⎪⎩ψ 4 ⎪⎭
⎡
⎤
⎢⎣ B2 ⎥⎦
Eje 3:
⎧t13 ⎫ ⎡1
⎪t ⎪ ⎢
⎪ 23 ⎪ ⎢0
⎨ ⎬=
⎪t33 ⎪ ⎢0
⎪⎩t 43 ⎪⎭ ⎢⎣0
0 0 0⎤⎧ψ 1 ⎫
1 0 0⎥⎥⎪⎪ψ 2 ⎪⎪
⎨ ⎬
0 1 0⎥⎪ψ 3 ⎪
⎥
0 0 1⎦⎪⎩ψ 4 ⎪⎭
⎡
⎢⎣
B3 ⎤⎥⎦
Las ecuaciones de equilibrio en los grados de libertad de borde del edificio, tanto de
diafragma como verticales, conducen a:
⎧Q ⎫ ⎡[K DD ]
⎨ ⎬=⎢
⎩ 0 ⎭ ⎣ [KVD ]
en que:
⎡[K DD ]
⎢ [K ]
⎣ VD
[K DV ]⎤ ⎧ q ⎫
[KVV ]⎥⎦ ⎨⎩ψ ⎬⎭
[K DV ]⎤ m ⎡βTj
= ⎢
[KVV ]⎥⎦ ∑
⎢0
j =1 ⎣
0 ⎤⎡ K j
⎥⎢
B Tj ⎦⎥ ⎣⎢C Tj
C j ⎤ ⎡β j
⎥⎢
D j ⎦⎥ ⎣⎢ 0
0⎤
⎥
B j ⎦⎥
Condensando estáticamente los grados de libertad verticales obtenemos:
{Q} = [ K D ]{q}
en que:
[ KD ] = [ KDD ] − [ KDV ][ KVV ]−1[ KVD ]
[ KD ] es la matriz de diafragma del edificio, para el modelo pseudo tridimensional
monolítico.
DINAMICA DE ESTRUCTURAS – TOMÁS GUENDELMAN B
39
ACHISINA
5.2.3 Diafragmas Deformables
El caso de diafragmas deformables conduce a un modelo tridimensional cuyo enfoque
requiere otros tipos de métodos de análisis. Sin embargo, lo más frecuente en la
edificación tradicional, es que los diafragmas tengan perforaciones tales que las losas
quedan subdivididas en trozos que pueden mantener su condición de indeformabilidad,
vinculados entre sí por elementos deformables, que denominaremos Elementos de
Enlace.
a
CG1
CG2
t = espesor de losa
PLANTA
La figura muestra la planta de un edificio que se puede suponer como de dos niveles con
diafragmas indeformables, conectados entre sí por tres elementos de enlace. En esta
forma, el número de niveles del edificio crece y los ejes resistentes verticales se vinculan
a uno, otro, o a ambos niveles de cada piso, y aparecen elementos de enlace, con
matrices de (6×6), que vinculan a dos niveles entre sí. Por ejemplo, el elemento de enlace
superior de la planta mostrada sería representado mediante el siguiente modelo:
I , A ,κ
v1
θ1
v2
u2
u1
θ2
1 3
ta
12
A = at
κ = 1,2
I=
Continuando con el ejemplo, los elementos resistentes se conectarían de la siguiente
forma:
DINAMICA DE ESTRUCTURAS – TOMÁS GUENDELMAN B
40
ACHISINA
NIVEL 1
3
1
2
Eje 1
PLANTA
NIVEL 2
NIVEL 1
Eje 2
NIVEL 2
Eje 3
ELEVACIONES
5.3 Ejes no Conectados en Todos los Pisos
El caso de ejes no conectados en todos los pisos aparece con mucha frecuencia y
corresponde a las siguientes situaciones:
•
•
•
•
Muros de subterráneos.
Ejes que desaparecen por efecto de rasantes.
Pisos de doble altura (Marcos de fachada de edificios con centros comerciales
en primer piso).
Edificios de losas desplazadas.
En general, se puede decir que el problema de ejes no conectados en todos los pisos se
descompone en dos casos:
•
•
Conexión de pisos contiguos hasta la base con desconexión contigua hacia
arriba.
Desconexión en niveles intermedios.
En el caso a) es posible rellenar los elementos faltantes del eje mediante barras ficticias
(propiedades muy pequeñas). Esto no es posible en el caso b), pues la conexión a un
nivel, que originalmente está desconectado, provoca una deformada de elementos reales
incorrecta, tal como se muestra a continuación.
DINAMICA DE ESTRUCTURAS – TOMÁS GUENDELMAN B
41
ACHISINA
correcto
erróneo
La teoría de subestructuras permite fácilmente resolver este problema. Para ello basta
con generar la matriz de rigidez condensada a los niveles efectivamente conectados para
luego intercalar filas y columnas nulas en los niveles desconectados.
5.4 EFECTO P-∆
En el caso de edificios que experimentan importantes desplazamientos laterales debido a
la acción de fuerzas sísmicas o de viento, puede ser necesario plantear las ecuaciones de
equilibrio en la posición deformada del edificio, lo que origina un incremento del momento
flector que producen las cargas laterales, debido a la acción de las cargas verticales
actuando sobre sus correspondientes desplazamientos. Esta consideración, generalmente
de segundo orden, puede ser de gran importancia por la peligrosa disminución de la
rigidez lateral que se pudiere presentar.
Existen diversas disposiciones para cuantificar el fenómeno y acotar su importancia,
observándose consenso en torno a incrementos del momento basal en torno a 10% del
debido exclusivamente a las cargas laterales. Sin embargo, la complejidad aparente del
problema no es tal, pudiendo considerarse siempre este efecto mediante la inclusión de la
rigidez geométrica del edificio, con su aporte negativo en la rigidez total. Las figuras
siguientes ilustran esta sencilla formulación:
DINAMICA DE ESTRUCTURAS – TOMÁS GUENDELMAN B
42
ACHISINA
DINAMICA DE ESTRUCTURAS – TOMÁS GUENDELMAN B
43
ACHISINA
La matriz [ΚG] es la misma que se obtendría en el marco ficticio de la figura siguiente:
I1
h1
I2
h2
Ii
In
hi
hn
DINAMICA DE ESTRUCTURAS – TOMÁS GUENDELMAN B
44
ACHISINA
I
en que :
i
=
− N i hi2
12 E
Modelo Equivalente
F1
F2
Fi
Fn
Cargas
Edificio
Bielas indeformab les
Marco ficticio
DINAMICA DE ESTRUCTURAS – TOMÁS GUENDELMAN B
45
ACHISINA
6 SINTESIS DE LA NORMA NCH433.OF96
6.1 SINTESIS DE LAS DISPOSICIONES PRINCIPALES
La norma NCh433.Of96 es un reglamento que establece las exigencias mínimas de
protección sísmica global, que en síntesis consisten en los siguientes principios e
hipótesis básicas:
•
Para movimientos sísmicos de intensidad moderada:
comportamiento linealmente elástico
ausencia de daños estructurales
•
Para sismos de mediana intensidad:
incursión moderada en el rango plástico
deformaciones remanentes mínimas
fisuras o grietas menores
estructura recuperable
•
Para sismos de intensidad excepcionalmente severa.
incursión franca en el rango plástico
deformaciones remanentes importantes
grietas de consideración
reparabilidad incierta
ausencia de colapso
El párrafo 5.1.1 señala:
“Particularmente, las disposiciones para edificios de muros de hormigón armado están
inspiradas en el satisfactorio comportamiento que tuvieron durante el sismo de mazo de
1985, los edificios de este tipo diseñados de acuerdo con la norma NCh433.Of72”.
DINAMICA DE ESTRUCTURAS – TOMÁS GUENDELMAN B
46
ACHISINA
(Texto reproducido de la norma)
4.3
CLASIFICACION DE EDIFICIOS Y ESTRUCTURAS DE ACUERDO A SU
IMPORTANCIA, USO Y RIESGO DE FALLA
4.3.1 PARA LOS EFECTOS DE LA APLICACION DE ESTA NORMA LOS EDIFICIOS
SE CLASIFICAN EN LA FORMA SIGUIENTE:
• Categoría A: edificios gubernamentales, municipales, de servicios públicos o de
utilidad pública (como cuarteles de policía, centrales eléctricas y telefónicas, correos y
telégrafos, radioemisoras, canales de televisión, plantas de agua potables y de
bombeo, etc.), y aquellos cuyo uso es de especial importancia en caso de catástrofe
(como hospitales, postas de primeros auxilios, cuarteles de bomberos, garajes para
vehículos de emergencia, estaciones terminales, etc.).
• Categoría B: edificios cuyo contenido es de gran valor (como bibliotecas, museos,
etc.) y aquellos donde existe frecuentemente aglomeración de personas. Entre estos
últimos se incluyen los siguientes edificios:
− Salas destinadas a asambleas para 100 o más personas;
− estadios y graderías al aire libre para 2000 o más personas;
− escuelas, parvularios y recintos universitarios;
− cárceles y lugares de detención;
− locales comerciales con una superficie igual o mayor que 500m2 por piso, o de
altura superior a 120 metros;
− Centros comerciales con pasillos cubiertos, con una área total superior a 3.000m2
sin considerar la superficie de estacionamientos.
• Categoría C: edificios destinados a la habitación privada o al uso público que no
pertenecen a ninguna de las categorías A o B, y construcciones de cualquier tipo cuya
falla puede poner en peligro otras construcciones de las categorías A, B o C.
• Categoría D: construcciones aisladas o provisionales no destinadas a habitación, no
clasificables en ninguna de las categorías anteriores.
DINAMICA DE ESTRUCTURAS – TOMÁS GUENDELMAN B
47
ACHISINA
Tabla 4.2
DEFINICION DE LOS TIPOS DE FUNDACIÓN. (SOLO PARA SER
USADA CON LA TABLA 6.3)
TIPO DE
SUELO
I
DESCRIPCIÓN
II
Roca: Material natural, con velocidad de propagación de ondas de corte in-situ
igual o mayor que 900 m/s, o bien, resistencia de la compresión uniaxial de
probetas intactas (sin fisuras) igual o mayor que 10 MPa y RQD igual o mayor que
50%.
a) Suelo con νs igual o mayor que 400 m/s en los 10m superiores y creciente con
la profundidad; o bien,
b) Grava densa, con peso unitario seco γd igual o mayor que 20 kN/m3, o índice de
densidad ID(DR) (densidad relativa) igual o mayor que 75%, o grado de
compactación mayor que 95% del valor Proctor Modificado; o bien;
c) Arena densa, con ID(DR) mayor que 75%, o índice de Penetración Estándar N
mayor que 40 (normalizado a la presión efectiva de sobrecarga de 0,10 MPa), o
grado de compactación superior al 95% del valor Proctor Modificado; o bien,
d) Suelo cohesivo duro, con resistencia al corte no drenado Su igual o mayor que
0,10 MPa (resistencia a la compresión simple qu igual o mayor que 0,20 MPa)
en probetas sin fisuras.
En todos los casos, las condiciones indicadas deberán cumplirse
independientemente de la posición del nivel freático y el espesor mínimo del estrato
debe ser 20m. Si el espesor sobre la roca es menor que 20m, el suelo se clasificará
como tipo I.
III
a) Arena permanentemente no saturada, con ID(DR) entre 55 y 75%, o N mayor
que 20 (sin normalizar a la presión efectiva de sobrecarga de 0,10 MPa); o bien,
b) Grava o arena no saturada, con grado de compactación menor que el 95% del
valor Proctor Modificado; o bien,
c) Suelo cohesivo con Su comprendido entre 0,025 y 0,10 MPa (qu entre 0,05 y
0,20 MPa) independientemente del nivel freático; o bien,
d) Arena saturada con N comprendido entre 20 y 40 (normalizado a la presión
efectiva de sobrecarga de 0,10 MPa).
IV
Espesor mínimo de estrato: 10m. Si el espesor del estrato sobre la roca o sobre
suelo correspondiente al tipo II es menor que 10m, el suelo se clasificará como tipo
II.
Suelo cohesivo saturado con Su igual o menor que 0,025 MPa (qu igual o menor
que 0,05 Mpa).
Espesor mínimo de estrato: 10m. Si el espesor del estrato sobre suelo
correspondiente a algunos tipos I, II, o III es menor que 10m, el suelo se clasificará
como tipo III.
DINAMICA DE ESTRUCTURAS – TOMÁS GUENDELMAN B
48
ACHISINA
Zonificación Sísmica de la Norma NCh433.Of96
DINAMICA DE ESTRUCTURAS – TOMÁS GUENDELMAN B
49
ACHISINA
6.2 METODOS DE ANALISIS
6.2.1 Método Estático
Campo de aplicación:
− estructuras de las categorías C y D, zona sísmica 1
− hasta 5 pisos y hasta 20m. de altura:
− entre 6 y 15 pisos si H/T, en direcciones x e y, son iguales o superiores a
40 m/seg., y si los esfuerzos de corte y momentos en cada nivel no difieren
en más de 10% respecto del resultado obtenido mediante un análisis modal
espectral con igual corte basal.
Las fuerzas sísmicas horizontales pueden calcularse por la expresión:
Fκ
=
Aκ Pκ
∑ A j Pj
Qο
j =1,n
Qο
Qο
C
Aκ
= corte basal
= CIP
2.75 Aο ' * n
T T
=
gR
(
=
Z ⎞
⎛
⎜ 1 − κ −1 ⎟
⎝
H ⎠
)
Z ⎞
⎛
− ⎜1 − κ ⎟
⎝
H⎠
Pk = Peso nivel k
Zο = 0
DINAMICA DE ESTRUCTURAS – TOMÁS GUENDELMAN B
50
ACHISINA
− C :
coeficiente sísmico
− I
coeficiente Relativo de Importancia
:
− P :
Peso sísmico total del edificio
− Aο :
Máxima Aceleración Efectiva del Suelo
− T* :
Período del modo con mayor masa traslacional equivalente en
la dirección de análisis.
− n ,T' :
Parámetros dependientes del tipo de suelo.
− R :
Factor de Modificación de Respuesta Estructural para análisis
estático.
CATEGORIA DEL EDIFICIO
(Acápite 4.3.1)
I
A
B
C
D
1.2
1.2
1.0
0.6
ZONA SÍSMICA
Aο
1
2
3
0.20g
0.30g
0.40g
TIPO DE SUELO
T' (seg)
n
I
II
III
IV
0.20
0.35
0.85
1.35
1.00
1.33
1.80
1.80
DINAMICA DE ESTRUCTURAS – TOMÁS GUENDELMAN B
51
ACHISINA
FACTOR DE MODIFICACION DE RESPUESTA PARA EL METODO ESTATICO ( R)
SISTEMA
ESTRUCTURAL
Pórticos
MATERIAL
ESTRUCTURAL
R
Acero estructural
7
Hormigón armado
7
Acero estructural
7
Hormigón armado
7
Hormigón armado y albañilería confinada. Corte muros
HA ≥ 50% del corte en cada piso.
6
Hormigón armado y albañilería confinada. Corte muros
HA < 50% del corte en cada piso.
4
Madera
5.5
Albañilería confinada
4
Albañilería armada de bloques de hormigón o similares
en que se llenan huecos y albañilería de muros doble
chapa.
4
Albañilería de ladrillos cerámicos con o sin relleno de
huecos y bloques de hormigón o similares en que no se
llenan huecos.
3
Cualquier tipo de estructuración o material que no pueda ser clasificado en
alguna de las categorías anteriores.
2
Muros y
sistemas
arriostrados
Limitaciones del valor del Coeficiente Sísmico C :
−
Valor Mínimo
:
Cmin
'
−
Valor Máximo :
Cmax
'
=
Aο 6 g
DINAMICA DE ESTRUCTURAS – TOMÁS GUENDELMAN B
52
ACHISINA
Según los valores de las siguientes tablas:
R
Cmax
'
TIPO DE SUELO
S
2
3
4
5.5
6
7
0.90SA0/g
0.60SA0/g
0.55SA0/g
0.40SA0/g
0.35SA0/g
0.35SA0/g
I
II
III
IV
0.90
1.00
1.20
1.30
Beneficio especial para edificios estructurados mediante muros de hormigón armado: Cmáx
se puede reducir multiplicando los valores de la tabla anterior por un factor “f” dado por:
f
= 125
. − 0.5q
. )
(0.5 ≤ q ≤ 10
en que “q” es el menor de los valores obtenidos del cálculo del cuociente del esfuerzo de
corte tomado por los muros de hormigón armado dividido por el esfuerzo de corte total en
cada uno de los niveles de la mitad inferior del edificio, en una y otra de las direcciones de
análisis.
Torsion Accidental
−
Momentos torsores por piso:
M t ,κ
=
Fκ
: fuerza estática en el nivel κ .
eac,κ
: excentricidad accidental en el nivel κ ,dada por:
Fκ
eac ,κ
±010
.
bκy Zκ H
±010
.
bκx Zκ H
; para sismo “X”
; para sismo “Y”
Se debe tomar igual signo en todos los niveles.
Los resultados del análisis por torsión accidental deben sumarse a los provenientes de la
acción de las fuerzas estáticas, en cada una de las direcciones de análisis.
DINAMICA DE ESTRUCTURAS – TOMÁS GUENDELMAN B
53
ACHISINA
(Texto reproducido de la norma)
5.9
DEFORMACIONES SÍSMICAS
5.9.1 Los desplazamientos horizontales y rotaciones de los diafragmas de piso deben
calcularse para las acciones sísmicas de diseño estipuladas en el capítulo 6, incluyendo el
efecto de la torsión accidental.
5.9.2 El desplazamiento relativo máximo entre dos pisos consecutivos, medido en el
centro de masas de cada una de las direcciones de análisis, no debe ser mayor que la
altura de entrepiso multiplicada por 0.002.
5.9.3 El desplazamiento relativo máximo entre dos pisos consecutivos, medido en
cualquier punto de la planta en cada una de las direcciones de análisis, no debe exceder
en más de 0.001 h al desplazamiento relativo correspondiente medido en el centro de
masas, en que h es la altura de entrepiso.
5.9.4 En pisos sin diafragma rígido, el valor máximo del desplazamiento transversal de
entrepiso de las cadenas, producido por solicitaciones que actúan perpendicularmente al
plano del muro sobre el que se ubica la cadena, debe ser igual o menor que la altura de
entrepiso multiplicada por 0.002.
1. SEPARACIONES ENTRE EDIFICIOS O CUERPOS DE EDIFICIOS
En edificios o en cuerpos de un mismo edificio que no se diseñen y construyan como
unidos o interconectados deben adoptarse las siguientes disposiciones para permitir su
movimiento relativo debido a fuerzas laterales.
5.10.1 La distancia de un edificio al plano medianero en cualquier nivel no debe ser
inferior a R*/3 veces el desplazamiento a ese nivel calculado con los métodos de análisis
establecidos en los párrafos 6.2 y 6.3, ni a un dos por mil de la altura del mismo nivel ni a
1.5 cm. Se exceptúan los edificios colindantes con un predio de uso público no destinado
a ser edificado.
5.10.2 Las distancias entre los cuerpos de un mismo edificio o entre el edificio en estudio
y uno existente, medidas en cada nivel, no deben ser inferiores al doble de las
establecidas en subpárrafo 5.10.1.
5.10.3 Se admitirá que se cumple con las condiciones de subpárrafos 5.10.1 y 5.10.2
cuando las separaciones al nivel de cada piso las satisfagan.
5.10.4 Las separaciones entre edificios o entre cuerpos de un mismo edificio no son
aplicables a las fundaciones, a menos que el proyecto estructural así lo establezca. Los
DINAMICA DE ESTRUCTURAS – TOMÁS GUENDELMAN B
54
ACHISINA
espacios de separación deben quedar libres de escombros y deben permitir movimientos
relativos en cualquier dirección. Los elementos de protección de las separaciones deben
asegurar la disposición anterior, sin transmitir entre los edificios o partes de edificios
adyacentes fuerzas cuya magnitud sea de significación.
6.2.2 Método Dinámico
Espectro de diseÑo
=
Sa
α
R*
=
IAοα
R*
1 + 4.5(Tn Tο )
1 +
= 1 +
P
(Tn Tο )3
010
. Tο
T*
+ T * Rο
α
:
Factor de Amplificación de la Aceleración Efectiva Máxima.
T*
:
Período del modo con mayor masa traslacional equivalente en la dirección
de análisis.
Tn
:
Período de vibración del modo de orden ″n″.
Tο y p
:
parámetros que dependen del Tipo de Suelo.
TIPO DE SUELO
To (seg)
p
I
II
III
IV
0.15
0.30
0.75
1.20
2.0
1.5
1.0
1.0
DINAMICA DE ESTRUCTURAS – TOMÁS GUENDELMAN B
55
ACHISINA
Rο
:
Factor de Modificación de Respuestas (método dinámico).
R*
:
Factor de Reducción de la Aceleración Espectral.
FACTOR DE MODIFICACION DE RESPUESTA PARA EL METODO DINAMICO (Rο)
SISTEMA
ESTRUCTURAL
Pórticos
MATERIAL
ESTRUCTURAL
Rο
Acero estructural
11
Hormigón armado
11
Acero estructural
11
Hormigón armado
11
Hormigón armado y albañilería confinada.
Corte muros HA ≥ 50% del corte en cada piso.
9
Hormigón armado y albañilería confinada.
Corte muros HA < 50% del corte en cada piso.
4
Madera
7
Albañilería confinada
4
Albañilería armada de bloques de hormigón o similares
en que se llenan huecos y albañilería de muros doble
chapa.
4
Albañilería de ladrillos cerámicos con o sin rellenos de
huecos bloques de hormigón o similares en que no se
llenan huecos.
3
Cualquier tipo de estructuración o material que no pueda ser clasificado en
alguna de las categorías anteriores.
(*)
Muros y sistemas
arriostrados
(*)
: No procede uso análisis modal espectral.
DINAMICA DE ESTRUCTURAS – TOMÁS GUENDELMAN B
56
ACHISINA
Corte Basal
Valor Mínimo :
Qmín
=
I(Aο /g) P/6
Si el componente de corte basal en la dirección de la acción sísmica resulta menor que
Qmín, todos los resultados del análisis deberán amplificarse por un factor de manera que
se alcance el valor señalado
Valor Máximo
:
Qmáx
=
ICmáxP
Si la componente de corte basal en la dirección de la acción sísmica resulta mayor que
Qmáx ,las solicitaciones de los elementos estructurales pueden multiplicarse por un factor
de modo que dicho esfuerzo de corte no sobrepase el valor señalado. Esta disposición no
rige para el cálculo de desplazamientos y rotaciones de los diafragmas horizontales de
piso.
Deformaciones Sísmicas
Rigen las disposiciones contenidas en los acápites 5.9.1, 5.9.2 y 5.9.3, ya detalladas
anteriormente.
Torsion Accidental
¾ Alternativa 1: Desplazamiento de los centros de masa de cada nivel en un 5% de
su dimensión en planta perpendicular a la dirección del piso.
¾ Alternativa 2: Momentos torsores estáticos en cada nivel, calculados como el
producto de la variación del esfuerzo de corte combinado en ese nivel, por una
excentricidad estática dada por las misma expresiones del método estático.
Los resultados de la torsión accidental se suman a los de análisis modales espectrales sin
desplazamiento de centros de masa.
Los efectos de la torsión accidental se pueden despreciar si, mediante el análisis de la
torsión accidental con la Alternativa 1, se producen variaciones de los desplazamientos
horizontales en todos los puntos de las plantas del edificio iguales o inferiores al 20%,
respecto del resultado obtenido con los centros de masas en su ubicación natural.
DINAMICA DE ESTRUCTURAS – TOMÁS GUENDELMAN B
57
ACHISINA
6.3 EJEMPLO DE ANALISIS SISMICO, SEGÚN NORMA NCh433.Of96
EDIFICIO DE 3 PISOS
6.3.1 Método Estático
PLANTA GENERAL DEL EDIFICIO
PESOS/ALTURAS
NCh433.Of96. PARAMETROS ESPECTRALES Y NORMATIVOS
unidades: ton-metros-segundos
DATOS GENERALES
METODO : ESTATICO; R = 7.00
CATEGORIA DEL EDIFICIO: C ;COEFICIENTE DE IMPORTANCIA I = 1.00
ZONA SISMICA : 2; Ao/g = 0.30
TIPO DE SUELO : II; T’ = 0.35 seg; n = 1.33; S = 1.00
Nivel
k
Peso
Pk (ton)
3
2
200.
200.
Centro de Gravedad
xg (m)
yg (m)
0.00
0.00
0.00
0.00
Altura
hk (m)
3.00
3.00
DINAMICA DE ESTRUCTURAS – TOMÁS GUENDELMAN B
58
ACHISINA
1
200.
0.00
PESO TOTAL P = 600. ton
0.00
3.00
ALTURA TOTAL H = 9.00 m
CORTES BASALES MAXIMOS Y MINIMOS
Cmax = 0.35SAo/g = 0.105; Qmax=CmaxIP=63 ton
= 0.050; Qmin=CminIP=30 ton
Cmin = Ao/6g
CORTES BASALES SEGUN X e Y
T*x = 0.30 seg (determinación aproximada)
T*y = 0.20 seg (determinación aproximada)
Qox = 2.75(Ao/g)(T’/T*x)nIP/R = 86.8 ton ===> usar 63 ton (Qmax)
Qoy = 2.75(Ao/g)(T’/T*y)nIP/R =148.8 ton ===> usar 63 ton (Qmax)
DISTRIBUCION VERTICAL DE FUERZAS SISMICAS
Nota: La numeración de niveles de la norma NCh433.Of96 es de abajo
hacia arriba. La base corresponde a k=0 y el cielo del último piso
a k=n.
Fk = QoAkPk/(ΣAjPj); Ak =
(1- z / H ) − (1- z / H ) ; z =0
k-1
0
k
j=1,n
A3 =
A2 =
A1 =
(1 − 6 / 9 ) − (1 − 9 / 9 )
(1 − 3 / 9 ) − (1 − 6 / 9 )
(1 − 0 / 9 ) − (1 − 3 / 9 )
= 0.5773; A3P3 = 115.46
= 0.2391; A2P2 =
47.82
= 0.1835; A1P1 =
36.70
ΣAjPj = 199.98
j=1,n
SISMOS X e Y: Igual distribución, pues Qox = Qoy
F3 = 63 *115.46/199.98 = 36.37 ton
F2 = 63 * 47.82/199.98 = 15.06 ton
F1 = 63 * 36.70/199.98 = 11.56 ton
DINAMICA DE ESTRUCTURAS – TOMÁS GUENDELMAN B
59
ACHISINA
CARGAS SISMICAS EN C.G. DE DIAFRAGMAS
Nota: Los grados de libertad del modelo de análisis se organizan
de
arriba
hacia
abajo,
agrupando
en
primer
término
los
desplazamientos x, a continuación los desplazamientos y, para
concluir con los giros en planta. Por este motivo, las
solicitaciones siguen el mismo orden, de arriba hacia abajo,
comenzando con las componentes según x, seguidas de las según y, y
terminando con los momentos de torsión en planta.
CARGAS PARA SISMO X
Componente Carga
1
2
3
4
5
6
7
8
9
36.37
15.06
11.56
0
0
0
0
0
0
CARGAS PARA SISMO Y
Componente
Carga
1
2
3
4
5
6
7
8
9
0
0
0
36.37
15.06
11.56
0
0
0
MATRICES DE RIGIDEZ LATERAL DE ELEMENTOS RESISTENTES (Obtenidas en
forma independiente)
ELEMENTO 1
78877
-142710
54161
-142710
339580
-231688
54161
-231688
409215
ELEMENTO 2
78877
-142710
54161
-142710
339580
-231688
54161
-231688
409215
ELEMENTO 3
99572
-174766
61587
-174766
411118
-270727
61587
-270727
479867
DINAMICA DE ESTRUCTURAS – TOMÁS GUENDELMAN B
60
ACHISINA
MATRIZ β DEL ELEMENTO 1 (R=4.000 ; α=180º)
0
0
0
0
0
0
0
0
0
-1
0
0
0
-1
0
0
0
-1
4
0
0
0
4
0
0
0
4
1
0
0
0
1
0
0
0
1
0
0
.5
.866
0
0
0
.866
0
0
0
.866
26667
-117225
207782
123718
-531058
938396
-244138
1041215
-1838293
74674
-131067
46187
-351271
637876
-244138
1415584
-2557137
966924
-131067
308320
-203034
637876
-1519886
1041215
-2557137
6081181
-4141729
46187
-203034
359879
-244138
1041215
-1838293
966924
-4141729
7316534
MATRIZ β DEL ELEMENTO 2 (R=1.000 ; α=180º)
0
0
0
0
0
0
0
0
0
-1
0
0
0
-1
0
0
0
-1
MATRIZ β DEL ELEMENTO 3 (R=0.866 ; α=300º)
.866
0
0
0
.866
0
0
0
.866
.5
0
0
0
.5
0
MATRIZ DE DIAFRAGMA K = Σ[βj]t[kj][βj]
j=1,3
74674
-131067
46187
43114
-75674
26667
74674
-131067
46187
-131067
308320
-203034
-75674
178014
-117225
-131067
308320
-203034
46187
-203034
359879
26667
-117225
207782
46187
-203034
359879
43114
-75674
26667
182647
-329112
123718
-351271
637876
-244138
-75674
178014
-117225
-329112
781939
-531058
637876
-1519886
1041215
DESPLAZAMIENTOS DE DIAFRAGMA
SISMO X
SISMO Y
.00998
.00565
.001963
-.006668
-.003756
-.001291
-.0022
-.001239
-.000426
-.006668
-.003756
-.001291
.00765
.004309
.00148
.00225
.001267
.000435
DINAMICA DE ESTRUCTURAS – TOMÁS GUENDELMAN B
61
ACHISINA
DISTRIBUCION DE FUERZAS LATERALES EN CADA ELEMENTO RESISTENTE
SISMO X
ELEMENTO 1
ELEMENTO 2
ELEMENTO 3
-19.1228
-7.9185
-6.0785
40.1215
16.6137
12.7529
41.9975
17.3895
13.3485
ELEMENTO 1
ELEMENTO 2
ELEMENTO 3
12.1231
5.0198
3.8539
-48.4932
-20.0803
-15.4139
.0002
.0001
.0001
SISMO Y
6.3.2 Método Dinámico
Se realiza sólo el análisis general del edificio. Una vez obtenidas las fuerzas modales, se
procede con cada una de ellas al igual que en el ejemplo estático, para posteriormente
combinar los resultados según la regla CQC.
PARAMETROS ESPECTRALES Y NORMATIVOS
CATEGORIA DEL EDIFICIO
COEFICIENTE DE IMPORTANCIA "I"
ZONA SISMICA
TIPO DE SUELO
Ro
R
Ao/g
Factor "q" para muros (entre 0.5 y 1.0)
CORTE BASAL MINIMO EN X e Y
CORTE BASAL MAXIMO EN X (SOLO ESFUERZOS)
CORTE BASAL MAXIMO EN Y (SOLO ESFUERZOS)
:
:
:
:
:
:
:
:
:
:
:
:
C
1.00
2
II
11.00
7.00
0.30
0.50 Sismo X
0.50 Sismo Y
5.00 % del Peso
10.50 % del Peso
10.50 % del Peso
DINAMICA DE ESTRUCTURAS – TOMÁS GUENDELMAN B
62
ACHISINA
FORMULA DE COMBINACION MODAL : CQC
PARAMETROS VIBRATORIOS DEL EDIFICIO
Nivel
Piso
1
2
3
W
Xg
Yg
hi
Jg
200.
200.
200.
0.00
0.00
0.00
0.00
0.00
0.00
3.00
3.00
3.00
8333.
8333.
8333.
PESO TOTAL
=
ALTURA TOTAL =
r=√(Jg/W)
LX
LY
6.45
6.45
6.45
20.00
20.00
20.00
10.00
10.00
10.00
600.00
9.00
MODO
PERIODO
(seg)
MASAS EQUIV. DIRECTAS
M-XX
M-YY
M-ZZ
%
%
%
1
2
3
4
5
6
7
8
9
1.0724
0.3070
0.2357
0.1858
0.1241
0.0701
0.0413
0.0376
0.0218
10.28
59.51
2.80
6.84
0.39
16.51
1.59
1.92
0.16
9.61
2.01
2.57
64.42
0.36
0.39
18.13
0.14
2.38
56.00
14.88
15.95
4.78
2.05
4.08
1.48
0.57
0.22
MODOS PREDOMINANTES EN CADA DIRECCION SISMICA
DIRECCION X
DIRECCION Y
MODO
PERIODO
(seg.)
MASA EQUIVALENTE
(%)
2
6
1
4
3
8
7
5
9
0.3070
0.0701
1.0724
0.1858
0.2357
0.0376
0.0413
0.1241
0.0218
59.51
16.51
10.28
6.84
2.80
1.92
1.59
0.39
0.16
Σ(Meq-X) = 100.00
MODO
PERIODO
(seg.)
4
7
1
3
9
2
6
5
8
0.1858
0.0413
1.0724
0.2357
0.0218
0.3070
0.0701
0.1241
0.0376
MASA EQUIVALENTE
(%)
64.42
18.13
9.61
2.57
2.38
2.01
0.39
0.36
0.14
Σ(Meq-Y) = 100.00
DINAMICA DE ESTRUCTURAS – TOMÁS GUENDELMAN B
63
ACHISINA
ESPECTROS DE DISEÑO DE LA NORMA NCh433.Of96
I
Ao/g
To
p
SISMO
X
T*
0.307
Y
0.186
:
:
:
:
1.000
0.300
0.300
1.500
R*
Ordenadas espectrales
6.301
Sa
g
4.962
Sa
g
n
)
1 + 4.5(0Τ.30
1. 5
= 0.048
n
)
1 + (0Τ.30
3
n
)
1 + 4.5(0Τ.30
1. 5
= 0.060
n
)
1 + (0Τ.30
3
ANALISIS SISMICO - DINAMICO - DIRECCION X
RESULTADOS GLOBALES COMBINADOS EN DIRECCION X
Nivel
u
Altura
z
Esfuerzo
de Corte
(Q)
Momento
Volcante
(M)
Momento
Exc. Dinámica
Torsor Absoluta Relativa
(T)
(ed=T/Q)
(ed/r)
1
2
3
0.00346
0.00200
0.00072
9.00
6.00
3.00
26.57
41.64
47.82
79.71
203.77
345.42
93.00
137.37
156.28
3.50
3.30
3.27
0.54
0.51
0.51
EFECTOS SISMICOS EN LA DIRECCION DE LA SOLICITACION:
Altura total del edificio
=
Periodo fundamental
=
Factor de Rigidez H/T
=
Esfuerzo de Corte Basal (Qb)
=
Factor de Amplificación por corte mínimo =
Factor de Reducción por corte máximo
=
Momento Volcante Basal (Mb)
=
Brazo de palanca de Qb (Mb/Qb)
=
Desplazamiento Nivel 1
=
Giro en Planta Nivel 1
=
Distancia CG - C.de Rotación
=
9.00
0.31
29.32
47.82 (
7.97 % P-TOTAL)
1.00
1.00
345.42
7.22 ( 80.25 % H-TOTAL)
0.00346 (
0.04 % H-TOTAL)
0.00063 rad
5.49 m
DINAMICA DE ESTRUCTURAS – TOMÁS GUENDELMAN B
64
ACHISINA
EFECTOS SISMICOS EN DIRECCION PERPENDICULAR A LA SOLICITACION:
Esfuerzo de Corte Basal
Momento Volcante Basal
Desplazamiento Nivel 1
=
=
=
17.56 (
128.53 (
0.00169 (
36.71 % Qb)
37.21 % Mb)
49.00 % d1)
ANALISIS SISMICO - DINAMICO - DIRECCION Y
RESULTADOS GLOBALES COMBINADOS EN DIRECCION Y
Nivel
v
Altura
z
Dist
Esfuerzo
de Corte
(Q)
1
2
3
0.00240
0.00139
0.00051
9.00
6.00
3.00
0.02
0.01
0.01
34.35
53.73
61.34
Momento Momento
Volcante Torsor
(M)
(T)
Exc.
Absoluta
(ed=T/Q)
Dinámica
Relativa
(ed/r)
103.05
263.30
445.50
2.23
1.97
1.95
0.35
0.31
0.30
76.52
105.86
119.61
EFECTOS SISMICOS EN LA DIRECCION DE LA SOLICITACION:
Altura total del edificio
=
Periodo fundamental
=
Factor de Rigidez H/T
=
Esfuerzo de Corte Basal (Qb)
=
Factor de Amplificación por corte mínimo =
Factor de Reducción por corte máximo
=
Momento Volcante Basal (Mb)
=
Brazo de palanca de Qb (Mb/Qb)
=
Desplazamiento Nivel 1
=
Giro en Planta Nivel 1
=
Distancia CG - C.de Rotación
=
9.00
0.19
48.45
61.34 ( 10.22 % P-TOTAL)
1.00
1.00
445.50
7.26 ( 80.70 % H-TOTAL)
0.00240 (
0.03 % H-TOTAL)
0.00072 rad
3.34 m
EFECTOS SISMICOS EN DIRECCION PERPENDICULAR A LA SOLICITACION:
Esfuerzo de Corte Basal
Momento Volcante Basal
Desplazamiento Nivel 1
=
=
=
22.29 (
162.44 (
0.00215 (
36.35 % Qb)
36.46 % Mb)
89.26 % d1)
DINAMICA DE ESTRUCTURAS – TOMÁS GUENDELMAN B
65
ACHISINA
7 CALIFICACION SÍSMICA: PERFIL BIO-SISMICO DE EDIFICIOS
A partir de una muestra estadística de 585 edificios reales construidos en el país, los
autores determinan valores y rangos confiables de 13 indicadores sísmicos que se
sugiere emplear como referentes para calificar nuevos proyectos. La naturaleza de la
muestra, que se observa en la figura Nº1, permite evaluar edificios de hasta 40 pisos.
400
585 Edificios
1170 Casos de Estudio
Número de Casos
300
200
100
50 -
45 - 50
40 - 45
35 - 40
30 - 35
25 - 30
20 - 25
15 - 20
10 - 15
5 - 10
0- 5
0
Núm ero de Pisos
Figura Nº1: Casos de Estudio
La necesidad de esta investigación es consecuencia de los fenómenos atribuibles a los
acelerados cambios tecnológicos de los últimos 30 años, que han tenido un importante
efecto en los procedimientos de análisis y diseño de edificios de hormigón armado,
observándose un significativo aumento en el uso de software estructural y sísmico en las
oficinas de proyectos. Paradojalmente, este indiscutible avance está asociado a una
pérdida de comprensión del comportamiento de la estructura resistente, debido a las
dificultades de globalizar resultados a partir de deformaciones y tensiones calculadas en
numerosas fibras, de numerosas secciones, para cada miembro de la estructura. Si se
agrega a lo anterior el hecho que el volumen de información necesario para el empleo de
tales procedimientos es significativo, será fácil comprender que existe un amplio margen
para errores humanos, de difícil detección e indiscutible gravedad.
En términos prácticos, se observa con temor cómo la experiencia acumulada pierde
terreno frente a la destreza computacional. Michael Pregnoff, en entrevista concedida en
1996 a Stanley Scott, para la serie "Connections: The EERI Oral History Series", señala
que ".... un ingeniero joven, sin experiencia, normalmente cree que mientras más
complejo sea el modelo teórico que utilice, los resultados estarán más próximos a la
verdad".
DINAMICA DE ESTRUCTURAS – TOMÁS GUENDELMAN B
66
ACHISINA
Tradicionalmente, el diseño sísmico de edificios es la consecuencia de un proceso
interactivo que se inicia con un prediseño, continúa con un análisis normativo y concluye
con la verificación del prediseño inicial. Sin embargo, es necesario tener presente que la
responsabilidad del ingeniero estructural no está acotada al sólo cumplimiento de las
disposiciones normativas, lo que hace necesario revisar el efecto de otros factores que
pudieran ser críticos en el diseño. Sólo a modo de ejemplo, no pueden quedar ausentes
de consideraciones especiales aspectos tales como: detección de mecanismos
potenciales de falla (Vulnerabilidad Sísmica); evaluación de las debilidades de la
estructuración del edificio (Peligrosidad Estructural); situaciones de exposición sísmica de
la estructura durante el proceso de construcción; grado de acoplamiento entre las
direcciones de análisis; redundancia y requerimientos de ductilidad; direcciones sísmicas
alternativas; etc. El estudio formal de cualquiera de estos factores pudiera requerir el
empleo de modelos teóricos sofisticados, que incorporen capacidades no lineales y que
exijan la realización de análisis de respuesta con registros de aceleraciones. Sin embargo,
es posible que en muchos casos sea factible calificar, y no sólo cuantificar, los resultados
de un análisis, mediante el empleo de la experiencia acumulada y el buen criterio.
El análisis del Perfil Bío-Sísmico puede conducir, en forma simple, a detectar deficiencias
de la estructura resistente, originando eventuales correcciones, o bien, recomendando
estudios complementarios de mayor rigor analítico, pero limitando tales casos a aquellas
situaciones que realmente los requieran. La elección de indicadores y los rangos
considerados satisfactorios, podrán modificarse conforme a la experiencia del ingeniero
estructural que realiza el análisis y diseño de un edificio, lo que no altera el concepto que
se pretende introducir con este trabajo. Se podrá observar que algunos indicadores están
relacionados entre sí, sin embargo no se han eliminado, debido a que detectan, con
diferente sensibilidad, diversos problemas de estructuración.
7.1 INDICADORES DE RIGIDEZ
•
Cuociente Altura Total/Período primer modo Traslacional
Este índice, con dimensiones de velocidad, ha sido considerado como un mejor estimador
de la rigidez del edificio que otros provenientes de proposiciones de uso frecuente. La
figura Nº2 ilustra la dependencia que se observa en la práctica chilena, entre la altura total
H del edificio y el período del primer modo traslacional T, observándose una fuerte
concentración de los valores en torno a una recta que pasa por el origen, de pendiente
comprendida entre 50 y 60 m/seg. En términos generales, es posible señalar que valores
de H/T entre 20 y 40 m/seg identifican los edificios flexibles; entre 40 y 70, los de rigidez
normal; y sobre 70, hasta un máximo de 150, a los rígidos. Valores inferiores a 20 m/seg
indican que la estructura es muy flexible y que, probablemente, presentará problemas de
cumplimiento de las disposiciones de desplazamiento que fijan las normas de análisis y
diseño sísmico. En el otro extremo, se considera que valores superiores a 150 m/seg
corresponden a estructuras con excesiva rigidez lateral.
DINAMICA DE ESTRUCTURAS – TOMÁS GUENDELMAN B
67
ACHISINA
150
H/T=70
H/T=150
100
Altura (m)
H/T=40
50
H/T=20
0
0.0
0.5
1.0
1.5
2.0
2.5
3.0
3.5
Período (s)
Figura Nº2: Período Fundam ental
•
Efecto P- δ
Se propone medir este efecto a través del cuociente entre el momento flector basal (MP) generado por los productos acumulados de los pesos de cada piso por sus respectivos
desplazamientos laterales, y el momento volcante basal (Mb) debido a la acción sísmica.
Se estima que los valores para los que este efecto puede ser ignorado están
comprendidos entre 0.00 y 0.05, rango ampliamente satisfecho por los edificios de la
muestra.
•
Desplazamiento del nivel superior
Este parámetro no está explícitamente restringido por la normativa sísmica vigente, sino
indirectamente, en el párrafo 5.9, a través del control sobre los máximos desplazamientos
relativos. La evaluación de este indicador, para la muestra estadística de este estudio,
señala que, para edificios flexibles, sus valores se sitúan entre 1 y 2 por mil de la altura
total H del edificio, y que para rigideces normales, (H/T del orden de 50 m/seg), se
concentran en torno a 0.5 por mil, lo que se conjuga adecuadamente con el criterio de
calificación de rigideces señalado anteriormente, haciendo recomendable que, para evitar
rigideces excesivas, este parámetro no esté por debajo de 0.2 por mil.
DINAMICA DE ESTRUCTURAS – TOMÁS GUENDELMAN B
68
ACHISINA
•
Máximos desplazamientos de entrepisos
La limitación de desplazamientos de entrepiso constituye uno de los aspectos más
importantes de la norma chilena NCh433.Of96, expresadas en el párrafo 5.9. El
subpárrafo 5.9.2 limita los desplazamientos entre centros de gravedad a 2 por mil de la
altura de entrepiso y el subpárrafo 5.9.3 limita el desplazamiento incremental, de cualquier
punto en la planta del edificio con respecto al de los centros de masa, a 1 por mil de dicha
altura. El análisis de los resultados para la muestra de este estudio permite sugerir, en
forma similar a lo señalado para el desplazamiento del nivel superior, que para evitar
excesiva rigidez, los desplazamientos de entrepiso, medidos en los centros de gravedad,
no tengan valores inferiores a 0.2 por mil. Los desplazamientos adicionales en cualquier
punto de la planta no están sujetos a esta restricción, debido a que dependen de los giros
de las plantas en torno a un eje vertical, valores que, deseablemente, deben ser bajos.
7.2 INDICADORES DE ACOPLAMIENTO
Existe consenso en recomendar un razonable alejamiento entre los períodos vibratorios
con predominio traslacional, en dos direcciones perpendiculares, y rotacional con respecto
a un eje vertical. Numerosas investigaciones han demostrado que este fenómeno,
muchas veces denominado sintonía modal, puede provocar fuertes amplificaciones
dinámicas de la respuesta, comparadas con los efectos que originaría un análisis de tipo
estático.
Una de las formas de controlarlo consiste en lograr estructuraciones que separen los
modos fundamentales de manera tal que el cuociente entre períodos fundamentales se
aleje de la unidad, en alrededor de un 20%. La sola consignación del cuociente de
períodos es insuficiente para calificar el grado de acoplamiento que presenta un edificio,
debiendo registrarse también los efectos que tal sintonía provoca. Desde el punto de vista
del acoplamiento rotacional, se mide la relación entre la masa equivalente rotacional
acoplada y la excentricidad dinámica (momento torsor basal dividido por el esfuerzo de
corte basal). La primera de estas variables se expresa como una fracción de la masa
equivalente traslacional directa y la segunda como una fracción del radio de giro de la
planta. Del mismo modo, para evaluar los efectos del acoplamiento traslacional, se
registra la estadística del cuociente de masas equivalentes traslacionales, acoplada y
directa. Además, los efectos debidos al acoplamiento traslacional, también se presentan a
través de las relaciones de esfuerzos de corte acoplados y directos y de los momentos
volcantes acoplados y directos.
DINAMICA DE ESTRUCTURAS – TOMÁS GUENDELMAN B
69
ACHISINA
7.3 INDICADORES DE REDUNDANCIA ESTRUCTURAL Y DEMANDA DE
DUCTILIDAD
•
Número de elementos relevantes en la resistencia sísmica
Este Indicador se utiliza para medir la Redundancia Estructural, parámetro que permite
calificar la capacidad de redistribución de esfuerzos de la estructura, particularmente
importante en la medida que la solicitación la lleva a incursionar en el rango no lineal. Tal
situación puede producirse en el momento en que algunos miembros alcanzan sus límites
elásticos y otros comienzan a tomar parte de la solicitación, o aumentan su compromiso
en la distribución global de esfuerzos. Las ventajas de la redundancia para proporcionar
reservas de resistencia, principalmente en el caso sísmico, son reconocidas en toda la
literatura y códigos sísmicos, principalmente las Normas ANSI de cargas y el informe ATC
3, que ha inspirado la filosofía de las principales normas sísmicas modernas.
Recientemente, el informe ATC 19 ha recogido sendas proposiciones de Bertero y de
Whittaker para incorporar el concepto de Factor de Redundancia, que debería emplearse
para reducir el Factor de Modificación de Respuesta, penalizando a las estructuras con
menos de 4 líneas resistentes verticales.
•
Factor de Reducción Espectral Efectivo (R**)
La resistencia a la acción sísmica que se suministra a una estructura puede hacer que
ésta se aleje de un comportamiento elástico, lo que sólo puede analizarse mediante un
procedimiento de respuesta en el tiempo aplicado a un modelo no-lineal. La dificultad
analítica que impone un análisis de esta naturaleza ha originado el desarrollo, de
aceptación mundial, del concepto de Factor de Modificación de Respuesta, "R", que se
asocia a la determinación de un factor de reducción de la acción sísmica, con el objeto de
generar un sismo de diseño, susceptible de analizar mediante el empleo de un modelo
lineal. ATC 19 recomienda que R sea igual al producto de tres componentes: Rm(Factor
de Ductilidad), Rs(Factor de Resistencia) y RR(Factor de Redundancia).
Los valores de diseño que establece la norma chilena, se deben obtener de un análisis
sísmico dinámico, con un espectro elástico reducido por el factor R*, función del Factor de
Modificación de Respuesta y del período de mayor masa traslacional equivalente, en la
dirección de análisis. Estos resultados deben posteriormente modificarse, amplificándolos
si el corte basal resultara inferior al corte basal mínimo, o reduciéndolos, si fuese superior
al corte basal máximo, lo que permite definir un Factor de Reducción Espectral Efectivo
R**. Los valores estadísticos de este indicador muestran que, en general, R** está por
debajo de 7, con una alta concentración en torno a 4. Se sugiere que, para valores de R**
comprendidos entre 3 y 7, se complemente el análisis de norma con procedimientos no
lineales aproximados tipo "push-over" y que para valores superiores a 7, sea
imprescindible utilizar técnicas más refinadas.
DINAMICA DE ESTRUCTURAS – TOMÁS GUENDELMAN B
70
ACHISINA
7.4 APLICACION DEL MODELO
Previo a la publicación de este trabajo, los autores efectuaron una marcha blanca del
procedimiento en aproximadamente 500 edificios, lo que permitió calibrar valores y rangos
normales de los indicadores sísmicos, en conformidad con la práctica chilena.
Posteriormente a la publicación, el procedimiento ha sido empleado permanentemente,
con útiles resultados. Con el fin de ilustrar la forma de aplicación del procedimiento, se
presenta la planilla de la figura adjunta, que ilustra el caso de un edificio de 17 pisos. En
ella se consignan los valores numéricos de los 13 indicadores sísmicos, para acciones
independientes en dos direcciones (denominadas x e y), y en forma gráfica, sobre una
matriz preimpresa de rangos aceptables. Este edificio cumple con las disposiciones
normativas, pero exhibe un inconveniente nivel de acoplamiento entre la torsión y la
traslación según "y", cuya corrección es factible si la detección es oportuna.
DINAMICA DE ESTRUCTURAS – TOMÁS GUENDELMAN B
71
ACHISINA
PERFIL BIO-SISMICO : EDIFICIO 17 PISOS
Valores dentro de rangos normales
Valores aceptables ligeramente
apartados de rangos normales
Valores fuera de rango
SISMO X
SISMO Y
CALIFICACION DE VALORES
42,974
121,633
INDICADORES SISMICOS
RIGIDEZ
1.-Altura Total / Período Traslacional (m/seg)
X
Y
0
2.-Efecto P-∆ (MP-∆ / Mb)
0,011
20
30
70
X
Y
0,002
0
3.-Desplazamiento total nivel superior (1000δ/H)
4.-Máx. desplaz. de entrepiso en centros de gravedad (1000δcg/h)
5.-Máx. desplaz. de entrepiso en puntos extremos (1000δext/h)
0,493
0,763
0,647
150
0.1
X
Y
0,179
0
0.2
2
0
0.2
2
X
Y
0,257
X
Y
0,844
0
1
ACOPLAMIENTO TRASLACION - ROTACION Y TRASLACION - TRASLACION
6.-Período Rotacional / Período Traslacional
0,836
X
Y
2,366
0
7.-Masa Eq. Rotac. Acoplada / Masa Eq. Traslac. Directa
8.-Excentricidad Dinámica (Mt/Qb) / Radio de Giro Basal
9.-Masa Eq. Trasl. Acoplada / Masa Eq. Trasl. Directa
10.-Corte Basal Acoplado / Corte Basal Directo
11.-Mto. Volcante Basal Acoplado / Mto. Volcante Basal Directo
0,097
0,263
0,079
0,133
0,107
0.8
1.2
1.5
2
X
Y
0,564
0
0.2
0.5
0
0.2
0.5
X
Y
0,399
X
Y
0,029
0
0.5
0
0.5
0
0.5
X
Y
0,109
X
Y
0,039
REDUNDANCIA ESTRUCTURAL Y DEMANDA DE DUCTILIDAD
12.-Nº de elementos relevantes en la resistencia sísmica
5
X
Y
4
0
13.-Factor de Reducción Espectral Efectivo (R**)
2,505
2
3
X
Y
3,126
0
3
DINAMICA DE ESTRUCTURAS – TOMÁS GUENDELMAN B
7
72