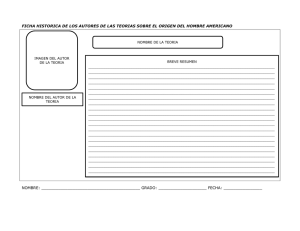
Análisis de Señales y Sistemas
160 horas totales → 32 Clases
Plano del
Tiempo
50 puntos
CAPÍTULO 1: CONCEPTOS BÁSICOS DE LA TEORIA DE SEÑALES EN TIEMPO CONTINUO
30 horas (12h+10+8) → 7 Clases
/15 PUNTOS
CAPÍTULO 2: ANÁLISIS DE SISTEMAS LINEALES ESTACIONARIOS (LTI)
45 horas (18h+15+12) → 9 Clases
/20 PUNTOS
EXAMEN UNIFICADO
/15 PUNTOS
CAPÍTULO 3: ANÁLISIS DE SISTEMAS LTI MEDIANTE LA TRANSFORMADA DE FOURIER
45 horas (18h+15+12) →8 Clases
/15 PUNTOS
Plano de la
Frecuencia
50 puntos
CAPÍTULO 4: ANÁLISIS DE SISTEMAS LTI MEDIANTE LA TRANSFORMADA DE LAPLACE
20 horas (10h+5+5) → 5 Clases
/10 PUNTOS
CAPÍTULO 5: APLICACIONES DE LA TL (Medidas de desempeño y Filtros Analógicos)
20 horas (10h+5+5) → 4 Clases
/ 10 PUNTOS
EXAMEN UNIFICADO
Señales y Sistemas
/15 PUNTOS
Ing. Diego Peñaloza
1
1
Análisis de Señales y Sistemas
1. CONCEPTOS BÁSICOS DE LA TEORIA DE SEÑALES EN TIEMPO CONTINUO
30 horas (12h+10+8) → 7 Clases
/ 15 PUNTOS
PRUEBAS
Prueba 1.1: Transformaciones Múltiples
Prueba 1.2: Funciones de Señales en TC
10 PUNTOS
/10 puntos
/10 puntos
(Exponenciales, Sinusoidales, Singulares, Pares e Impares y Suma de Periódicas )
Plano del
Tiempo
50 puntos
Prueba 1.3: Energía y Potencia de la Señal
/10 puntos
TRABAJOS
Trabajo 1.1: Transformaciones Múltiples
Trabajo 1.2: Funciones de Señales en TC
Trabajo 1.3: Energía y Potencia de la Señal
/ 5 PUNTOS
/ 5 Puntos
/ 5 Puntos
/ 5 Puntos
2. ANÁLISIS DE SISTEMAS LINEALES ESTACIONARIOS (LTI)
45 horas (18h+15+12)→ 9 Clases
/ 20 PUNTOS
PRUEBAS
Prueba 2.1: Propiedades de Sistemas
Prueba 2.2: Modelado de Circuitos Eléctricos
Prueba 2.3: Respuesta al Impulso de Circuitos Eléctricos
Prueba 2.4: Convolución Gráfica y Analítica
15 PUNTOS
/15 puntos
/15 puntos
/15 puntos
/15 Puntos
TRABAJOS
Trabajo 2.1: Modelado de Circuitos (parte 1: Obtención de las ED)
Trabajo 2.2: Modelado de Circuitos (parte 2: Respuesta al Impulso y al escalón)
Trabajo 2.3: Convolución Gráfica y Analítica
/ 5 PUNTOS
/ 5 Puntos
/ 5 Puntos
/ 5 Puntos
2. EXAMEN UNIFICADOS (Resolución de Sistemas, incluye entradas periódicas) / 15 PUNTOS
Señales y Sistemas
Ing. Diego Peñaloza
2
2
SEÑALES Y SISTEMAS
CAPITULO 1
CONCEPTOS BÁSICOS DE LA TEORIA DE SEÑALES EN TIEMPO CONTÍNUO
1.1. Definición de señales en tiempo continuo y tiempo discreto.
1.1.1 Definición de señal
1.1.2 Definición de ruido
1.2. Clasificación de señales
1.3. Operaciones sobre señales: Transformaciones Múltiples
1.4. Funciones de señales en tiempo continuo.
1.5. Funciones par e impar de tiempo continuo.
1.6. Funciones periódicas en tiempo continuo.
1.7. Energía y Potencia de la señal.
Señales y Sistemas
Ing. Diego Peñaloza
3
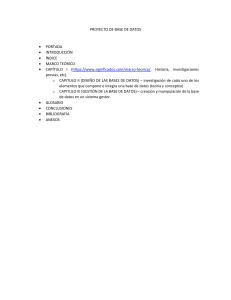
CAPITULO 1:
CONCEPTOS BÁSICOS DE LA TEORIA DE SEÑALES EN TIEMPO CONTÍNUO
Señales y Sistemas
Descripción
Lenguaje Matemático
Señales y Sistemas
Representación
Ing. Diego Peñaloza
4
CAPITULO 1: CONCEPTOS BÁSICOS DE LA TEORIA DE SEÑALES EN TIEMPO CONTÍNUO
1.1. Definición de Señales en tiempo continuo y en tiempo discreto
1.1.1 Definición de señal
Una señal es la variación de una magnitud física en el tiempo o en el espacio, y que puede ser
medida, transmitida, procesada o interpretada para obtener información sobre el medio que la
genera o la modifica.
Las señales pueden ser de distintos tipos, como eléctricas, mecánicas, ópticas, acústicas, químicas,
biológicas, entre otras, y pueden ser utilizadas para comunicar información, controlar procesos,
generar imágenes o sonidos, o para cualquier otro propósito que requiera la detección o la
transmisión de una variación en el medio.
Las señales pueden ser analógicas o digitales, continuas o discretas, y pueden tener diferentes
características como frecuencia, amplitud, fase, polaridad, forma de onda, entre otras.
Señal: Es la variación en el tiempo de una
magnitud física que pretende llevar
información.
Señales y Sistemas
Ing. Diego Peñaloza
5
CAPITULO 1: CONCEPTOS BÁSICOS DE LA TEORIA DE SEÑALES EN TIEMPO CONTÍNUO
1.1. Definición de Señales en tiempo continuo y en tiempo discreto
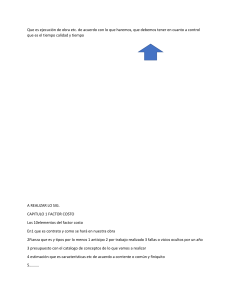
1.1.2 Definición de ruido
En el contexto de las señales, el ruido se refiere a cualquier tipo de perturbación no deseada que se
superpone a la señal original y que puede afectar la calidad de la información transmitida o
procesada. El ruido puede ser de origen interno o externo a la señal, y puede ser generado por
diversas fuentes, como interferencias electromagnéticas, variaciones aleatorias de la señal, errores
de transmisión o de recepción, entre otros.
La presencia de ruido puede afectar la calidad de la señal y reducir la capacidad de detección o de
transmisión de la información. Por esta razón, es importante emplear técnicas de procesamiento de
señales para reducir o eliminar el ruido y mejorar la calidad de la señal.
Señal
0
1
0
1
1
0
0
1
1
0
0
1
0
1
Ruido: Es una señal aleatoria, que obedece a
variaciones indeseables de la magnitud física. Su
contenido no es información útil.
Ruido
Señal
+
Ruido
0
1
?
Señales y Sistemas
1
1
0
1
1
1
0
0
1
0
0
Ing. Diego Peñaloza
6
SEÑALES Y SISTEMAS
CAPITULO 1
CONCEPTOS BÁSICOS DE LA TEORIA DE SEÑALES EN TIEMPO CONTÍNUO
1.1. Definición de señales en tiempo continuo y discreto.
1.2. Clasificación de señales
1.2.1 De tiempo continuo - valor continuo
1.2.2 De tiempo discreto - valor continuo
1.2.3 De tiempo continuo - valor discreto
1.2.4 De tiempo discreto - valor discreto
1.2.5 Otro tipo de clasificaciones
1.2.6 Proceso de conversión de señal analógica a señal digital
1.2.7 Función matemática de una señal
1.2.8 Función continua vs continuidad
1.3. Operaciones sobre señales: Transformaciones Múltiples
1.4. Funciones de señales en tiempo continuo.
1.5 Funciones par e impar de tiempo continuo.
1.6. Funciones periódicas en tiempo continuo.
1.7. Energía y Potencia de la señal.
Señales y Sistemas
Ing. Diego Peñaloza
7
CAPITULO 1: CONCEPTOS BÁSICOS DE LA TEORIA DE SEÑALES EN TIEMPO CONTÍNUO
1.2. Clasificación de Señales
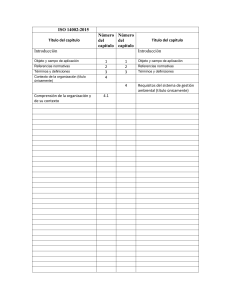
1.2.1 De tiempo continuo - valor continuo
Llamada también señal analógica, es aquella cuyos valores x(t) se definen dentro de un
intervalo de valores máx y min, para todo instante sobre algún intervalo de tiempo.
x(t)
máximo
t
mínimo
La variable continua e independiente (t) se la pone entre paréntesis
Señales y Sistemas
Ing. Diego Peñaloza
8
CAPITULO 1: CONCEPTOS BÁSICOS DE LA TEORIA DE SEÑALES EN TIEMPO CONTÍNUO
1.2. Clasificación de Señales
1.2.2 De tiempo discreto - valor continuo
Una señal de tiempo discreto tiene valores definidos solo en puntos discretos en el tiempo y
no entre ellos. Algunas señales son discretas por la naturaleza misma del fenómeno
analizado.
x[n]
n
La variable independiente [n] se la pone entre corchetes.
Llamada también Secuencia
Señales y Sistemas
Ing. Diego Peñaloza
9
CAPITULO 1: CONCEPTOS BÁSICOS DE LA TEORIA DE SEÑALES EN TIEMPO CONTÍNUO
1.2. Clasificación de Señales
1.2.2 De tiempo discreto - valor continuo
Otras señales de tiempo discretas provienen del muestreo de una señal de tiempo continua,
MUESTREO
x(t)
t
(b)
t
xs(t)
∆t=T
Señales y Sistemas
(a)
Ing. Diego Peñaloza
1
0
CAPITULO 1: CONCEPTOS BÁSICOS DE LA TEORIA DE SEÑALES EN TIEMPO CONTÍNUO
1.2. Clasificación de Señales
1.2.3 De tiempo continuo - valor discreto
Una señal de valor discreto solo puede cuantificarse para ciertos valores tomados de un
conjunto discreto finito.
Supongamos que el criterio es
que el valor de señal se
cuantifica al valor del intervalo
inferior que superó.
x(t)
∆x(t)
t
Repetir el ejercicio suponiendo
que el criterio es que el valor de
señal se cuantifica al intervalo
superior cuando supera el valor
medio del intervalo, caso
contrario se queda en el
intervalo inferior
Señales y Sistemas
Ing. Diego Peñaloza
1
1
CAPITULO 1: CONCEPTOS BÁSICOS DE LA TEORIA DE SEÑALES EN TIEMPO CONTÍNUO
1.2. Clasificación de Señales
1.2.4 De tiempo discreto - valor discreto
Además de estar cuantificado para ciertos valores de la señal, estos existen solo en cierto
instantes de tiempo. A esto se define como una señal digital.
Generalmente estamos familiarizados con dos niveles de cuantización.
x(t)
∆x(t)
Si no se escogen bien los
tiempos de muestreo, será
difícil volver a reconstruir la
señal.
t
Señal original
Señal digital
Señal reconstruida
∆t=T
Señales y Sistemas
Ing. Diego Peñaloza
1
2
CAPITULO 1: CONCEPTOS BÁSICOS DE LA TEORIA DE SEÑALES EN TIEMPO CONTÍNUO
1.2. Clasificación de Señales
1.2.5 Otro tipo de clasificación
•
Señales de Energía y señales de Potencia (detallamos al final del Capítulo)
•
Aleatorias (ruido) – No Aleatorias (determinísticas)
Una señal aleatoria es aquella cuyos valores no pueden predecirse con exactitud y que
no es posible describirla por medio de ninguna función matemática. Un nombre común
para una señal aleatoria es ruido.
Una señal no aleatoria, también recibe el nombre de señal determinística, y es aquella
que es posible describirla matemáticamente, al menos de manera aproximada.
x(t)
t
Random signal = Ruido
Señales y Sistemas
Ing. Diego Peñaloza
13
CAPITULO 1: CONCEPTOS BÁSICOS DE LA TEORIA DE SEÑALES EN TIEMPO CONTÍNUO
1.2. Clasificación de Señales
Ejemplo 1: Escriba los nombres de cada combinación
TIEMPO
Continuo
Discreto
Continuo
Señal
Analógica
Señal
Muestreada
Discreto
Señal
Cuantizada
Señal
Digital
VALORES
Señales y Sistemas
Ing. Diego Peñaloza
14
CAPITULO 1: CONCEPTOS BÁSICOS DE LA TEORIA DE SEÑALES EN TIEMPO CONTÍNUO
1.2. Clasificación de Señales
Ejemplo 2: Identifique el tipo de Señal
x(t)
Señal analógica = valor continuo en tiempo continuo
Señales y Sistemas
t
Ing. Diego Peñaloza
15
CAPITULO 1: CONCEPTOS BÁSICOS DE LA TEORIA DE SEÑALES EN TIEMPO CONTÍNUO
1.2. Clasificación de Señales
Ejemplo 3: Identifique el tipo de Señal
x(t)
t
Señal cuantificada = Valor discreto en tiempo continuo
Señales y Sistemas
Ing. Diego Peñaloza
16
CAPITULO 1: CONCEPTOS BÁSICOS DE LA TEORIA DE SEÑALES EN TIEMPO CONTÍNUO
1.2. Clasificación de Señales
Ejemplo 4: Identifique el tipo de Señal
xs(t)
t
Señal de datos muestreada
Señales y Sistemas
Ing. Diego Peñaloza
17
CAPITULO 1: CONCEPTOS BÁSICOS DE LA TEORIA DE SEÑALES EN TIEMPO CONTÍNUO
1.2. Clasificación de Señales
Ejemplo 5: Identifique el tipo de Señal
Xs[n]
n
•
•
Señales y Sistemas
La regla aplicada para la
cuantización es:
• Si supera el punto medio del
intervalo, registramos el límite
superior de intervalo.
• Si no supera se queda en el
límite inferior del intervalo.
Señal de datos muestreada
Señal de datos digital
Ing. Diego Peñaloza
18
CAPITULO 1: CONCEPTOS BÁSICOS DE LA TEORIA DE SEÑALES EN TIEMPO CONTÍNUO
1.2. Clasificación de Señales
Ejemplo 6: Identifique el tipo de Señal
Señal analógica con ruido.
Señales y Sistemas
Ing. Diego Peñaloza
19
CAPITULO 1: CONCEPTOS BÁSICOS DE LA TEORIA DE SEÑALES EN TIEMPO CONTÍNUO
1.2. Clasificación de Señales
1.2.6. Proceso de conversión de señal analógica a señal digital
x(t)
Codificación
x[n]
CUANTIFICACIÓN = Señal Digital de TD / VD
110 = 6
101 = 5
100 = 4
Señal de datos analógica =TC / VC
0
t
4
6
5
n
7
Xs[5,6,7]
n
n
Xs[4]
n
Xs[3]
n
Xs[2]
n
Xs[1]
Xs[0]
Señales de TD / VC
Señales y Sistemas
3
2
1
MUESTREO
n
xs(t)
t
011 = 3
010 = 2
001 = 1
000 = 0
Los valores codificados son
Señales Cuantizadas = TC / VD
Ing. Diego Peñaloza
20
CAPITULO 1: CONCEPTOS BÁSICOS DE LA TEORIA DE SEÑALES EN TIEMPO CONTÍNUO
1.2. Clasificación de Señales
1.2.6. Proceso de conversión
de señal analógica
a señal digital
Ejemplo 8:
Proceso de conversión
de señal analógica
a señal digital
Señales y Sistemas
Ing. Diego Peñaloza
21
CAPITULO 1: CONCEPTOS BÁSICOS DE LA TEORIA DE SEÑALES EN TIEMPO CONTÍNUO
1.2. Clasificación de Señales
1.2.7. Funciones Matemática de Tiempo Continuo
Señales Analógicas
Voltaje,
Las señales transportan información
Corriente.
Queremos manipular estas señales mediante operaciones matemáticas.
Expresión Matemática,
Para esto necesitamos describir una
Señal Analógica mediante:
Curva o gráfica, o;
Tabla de Valores
Una señal REAL, difícilmente puede describirse exactamente. Solo podemos
aproximarnos mediante un MODELO adecuado para la manipulación matemática.
Este modelo se llama FUNCIÓN MATEMATICA.
Señales y Sistemas
Ing. Diego Peñaloza
22
CAPITULO 1: CONCEPTOS BÁSICOS DE LA TEORIA DE SEÑALES EN TIEMPO CONTÍNUO
1.2. Clasificación de Señales
1.2.7. Funciones Matemática de Tiempo Continuo
VIDA REAL
MODELO MATEMÁTICO QUE LO
REPRESENTA
Señal Analógica
Función en Tiempo Continuo (TC)
Señales Discretas
Función en Tiempo Discreto [TD]
La Función Continua, puede estar
en el plano del tiempo o en el
plano de la frecuencia
Plano del Tiempo:
f(t), g(t) o h(t)
Plano de la Frecuencia: F(ꙍ), G(ꙍ) o H(ꙍ)
F(ꙍ)
f(t)
ꙍ
t
Plano del Tiempo
Señales y Sistemas
Plano de la Fecuencia
Ing. Diego Peñaloza
23
CAPITULO 1: CONCEPTOS BÁSICOS DE LA TEORIA DE SEÑALES EN TIEMPO CONTÍNUO
1.2. Clasificación de Señales
1.2.8. Funciones de Tiempo Continuo vs Continuidad
CONTINUIDAD
Una función y = f(t) es continua en un punto a, si los límites por la derecha y la
izquierda son iguales, y coinciden con el valor de la función en ese punto.
f(t)
lim 𝑓 𝑡 = 𝑐
c
𝑡→𝑎−
lim 𝑓 𝑡 = 𝑐
lim 𝑓 𝑡 = 𝑐
𝑡→𝑎
𝑡→𝑎+
𝑓 𝑎 =𝑐
a
t
Función Continua y de Tiempo Continuo
Señales y Sistemas
Ing. Diego Peñaloza
24
CAPITULO 1: CONCEPTOS BÁSICOS DE LA TEORIA DE SEÑALES EN TIEMPO CONTÍNUO
1.2. Clasificación de Señales
1.2.8. Funciones de Tiempo Continuo vs Continuidad
Ejemplo: Evalúe si cada función es de Tiempo Continuo e indique su continuidad
g(t)
…
…
t
Función Continua y de Tiempo Continuo
Señales y Sistemas
Ing. Diego Peñaloza
25
CAPITULO 1: CONCEPTOS BÁSICOS DE LA TEORIA DE SEÑALES EN TIEMPO CONTÍNUO
1.2. Clasificación de Señales
1.2.8. Funciones de Tiempo Continuo vs Continuidad
Ejemplo: Evalúe si cada función es de Tiempo
Continuo e indique su continuidad
h(t)
m=4
m=3
m=-3
DISCONTINUIDAD
m=-2
𝐥𝐢𝐦 𝒈 𝒕 + 𝜺 ≠ 𝐥𝐢𝐦 𝒈 𝒕 − 𝜺
m=1
𝜺→𝟎
m=2
m=-4
𝜺→𝟎
t
Función Continua y de Tiempo Continuo
h´(t)
En los Puntos de discontinuidad
existen saltos
t
Por lo tanto, los términos “continuo”
y “tiempo continuo” significan cosas
diferentes.
Función Discontinua y de Tiempo Continuo
Señales y Sistemas
Ing. Diego Peñaloza
26
CAPITULO 1: DESCRIPCIÓN MATEMÁTICA DE SEÑALES
1.2. Funciones de Tiempo Continuo vs Continuidad
GRACIAS
Fin 1 era Clase
Señales y Sistemas
Ing. Diego Peñaloza
27
SEÑALES Y SISTEMAS
CAPITULO 1
CONCEPTOS BÁSICOS DE LA TEORIA DE SEÑALES EN TIEMPO
CONTÍNUO
1.1. Definición de señales en tiempo continuo y discreto.
1.2. Clasificación de Señales
1.3. Operación sobre señales: Transformaciones Múltiples
1.3.1 Escalamiento de amplitud
1.3.2 Desplazamiento vertical
1.3.3 Desplazamiento de tiempo
1.3.4 Escalamiento de tiempo
1.3.5 Transformaciones Múltiples
1.4. Funciones de señales en tiempo continuo.
1.5 Funciones par e impar de tiempo continuo.
1.6. Funciones periódicas en tiempo continuo.
1.7. Energía y Potencia de la señal.
Señales y Sistemas
Ing. Diego Peñaloza
28
CAPITULO 1: CONCEPTOS BÁSICOS DE LA TEORIA DE SEÑALES EN TIEMPO CONTÍNUO
1.3. Operación sobre señales: Transformaciones Múltiples
4
1.3.1 Escalamiento de Amplitud
𝒙 𝒕 =
3
𝒈 𝒕 → 𝑨 𝒈(𝒕)
e’
2
1
𝒈(𝒕)
-4 -3 -2 -1
e
2
-4
3
4
5
t
f
d
0 1
2
3
4
5
t
4
b’’
c
-3
b
2
-2
-3
-2
a
b’
3
-1
f’
d’
-4 -3 -2 -1 0 1
-1
c’
a’
4
1
𝟏
𝒈(𝒕)
𝟐
2
a’’
-4
-4 -3 -2 -1
Un factor negativo de escalamiento
produce una rotación sobre el eje t.
3
1
-1
𝟏
𝒚 𝒕 = − 𝒈(𝒕)
𝟐
c’’
d’’
0 1
2
3 4
f’’
5
t
-2
-3
e’’
-4
Señales y Sistemas
Ing. Diego Peñaloza
29
CAPITULO 1: CONCEPTOS BÁSICOS DE LA TEORIA DE SEÑALES EN TIEMPO CONTÍNUO
1.3. Operación sobre señales: Transformaciones Múltiples
1.3.2 Desplazamiento Vertical
𝒈 𝒕 →𝒈 𝒕 +𝑩
𝒈 𝒕 +𝟐
𝒈(𝒕) e
4
4
3
3
2
d’
f
B=2
d
-3
-2
-1
c
a
0 1
-1
2
3
f’
2
1
-4
e’
4
5
t
c’ 1
a’
-4
-3
-2
-2
-3
-4
b’
-1
0 1
-1
2
3
4
5
t
-2
-3
-4
b
Sumar una constante positiva eleva la
curva, mientras que un valor negativo de B
desplaza la curva hacia abajo.
Este valor se conoce como nivel de
continua u offset
Señales y Sistemas
Ejemplo:
Dibujar 𝒈 𝒕 − 𝟐
Ing. Diego Peñaloza
30
CAPITULO 1: CONCEPTOS BÁSICOS DE LA TEORIA DE SEÑALES EN TIEMPO CONTÍNUO
1.3. Operación sobre señales: Transformaciones Múltiples
1.3.3 Desplazamiento en el Tiempo
𝒈(𝒕 − 𝟐)
𝒕 → (𝒕 − 𝜶)
e’
4
3
2
𝒈(𝒕) e
1
-4
4
-3
-2
-1
3
2
1
d
-4
-3
-2
-1
0 1
-1
3
4
5
t
3
4
5
t
c’
-3
-4
2
3
4
5
b’
t
𝒈(𝒕 + 𝟐) e’’
-2
a
2
-2
a’
f
0 1
-1
f’
d’
c
-3
4
-4
3
b
2
d’’
El signo negativo en el argumento provoca
un desplazamiento a la derecha, mientras
que un positivo desplaza a la izquierda.
-4
-3
a’’
-2
-1
c’’
1
0 1
-1
f’’
2
-2
-3
-4
b’’
Señales y Sistemas
Ing. Diego Peñaloza
31
CAPITULO 1: CONCEPTOS BÁSICOS DE LA TEORIA DE SEÑALES EN TIEMPO CONTÍNUO
1.3. Operación sobre señales: Transformaciones Múltiples
1.3.4 Escalamiento en el Tiempo
ax´= 2ax
bx´= 2bx
cx´= 2cx
dx´= 2dx
ex´= 2ex
fx´ = 2fx
𝒕
𝒕→
𝒂
𝒈(𝒕) e
4
4
3
3
2
f
1
-4
-3
-2
-1
0
c
a
-1
d
1
e´
2
f´
1
2
3
4
5
t
-2
-3
-8
-7
-6
-5
-4
b
Al dividir el tiempo (en el argumento) para
una constante se dilata la curva, y al
multiplicarlo por una constante (en el
argumento) se contrae.
Si 𝒂 es negativo se produce un giro sobre el
eje vertical
-3
-2
-1
0
1
2
d´
3
4
5
6
7
8
-1
t
c´ -2
a´
-3
-4
Señales y Sistemas
𝒕
𝟐
𝒈
-4
b´
Ejemplo
𝒕
Dibujar : 𝒈(𝟐𝒕), 𝒈 −𝟐𝒕 , 𝒈 − 𝟐
Ing. Diego Peñaloza
32
CAPITULO 1: CONCEPTOS BÁSICOS DE LA TEORIA DE SEÑALES EN TIEMPO CONTÍNUO
1.3. Operación sobre señales: Transformaciones Múltiples
1.3.5 Transformaciones Múltiples
1. Escalamiento en Amplitud
3. Desplazamiento en el Tiempo
𝒈 𝒕 → 𝑨𝒈
𝒕 − 𝒕𝒐
𝒂
2. Escalamiento en el Tiempo
(afecta a todo el argumento de la función)
PROCEDIMIENTO NORMAL
A
𝒈 𝒕
Escalamiento
en Amplitud
Señales y Sistemas
𝑨𝒈 𝒕
𝒕 → 𝒕/𝒂
Escalamiento
en el Tiempo
𝑨𝒈
𝒕
𝒂
𝒕 → 𝒕 − 𝒕𝒐
𝑨𝒈
𝒕 − 𝒕𝟎
𝒂
Desplazamiento
en el Tiempo
Ing. Diego Peñaloza
33
CAPITULO 1: CONCEPTOS BÁSICOS DE LA TEORIA DE SEÑALES EN TIEMPO CONTÍNUO
1.3. Operación sobre señales: Transformaciones Múltiples
1.3.5 Transformaciones Múltiples
Ejemplo: Obtener −2𝑔
PROCEDIMIENTO NORMAL
𝑡+2
4
A
𝒈 𝒕
𝑨𝒈 𝒕
Escalamiento
en Amplitud
𝒕 → 𝒕/𝒂
Escalamiento
en el Tiempo
𝑨𝒈
𝒕
𝒂
𝒕 → 𝒕 − 𝒕𝒐
𝑨𝒈
𝒕 − 𝒕𝟎
𝒂
Desplazamiento
en el Tiempo
𝒈(𝒕)
𝒕
−𝟐𝒈(𝒕)
𝒕
−𝟐𝒈
𝒕
𝟒
𝒕
−𝟐𝒈
𝒕+𝟐
𝟒
𝒕
Señales y Sistemas
Ing. Diego Peñaloza
34
CAPITULO 1: CONCEPTOS BÁSICOS DE LA TEORIA DE SEÑALES EN TIEMPO CONTÍNUO
1.3. Operación sobre señales: Transformaciones Múltiples
1.3.5 Transformaciones Múltiples
Caso Especial
1. Escalamiento en Amplitud
2. Desplazamiento en el Tiempo
𝒈 𝒕 → 𝑨𝒈 𝒃𝒕 − 𝒕𝟎
3. Escalamiento en el Tiempo
(NO afecta a todo el argumento de la función)
PROCEDIMIENTO (Caso Especial)
A
𝒈 𝒕
Escalamiento
en Amplitud
Señales y Sistemas
𝑨𝒈 𝒕
𝒕 → 𝒕 − 𝒕𝒐
Desplazamiento
en el Tiempo
𝑨𝒈(𝒕 − 𝒕𝟎 )
𝒕 → 𝒃𝒕
𝑨𝒈 𝒃𝒕 − 𝒕𝟎
Escalamiento
en el Tiempo
Ing. Diego Peñaloza
35
CAPITULO 1: CONCEPTOS BÁSICOS DE LA TEORIA DE SEÑALES EN TIEMPO CONTÍNUO
1.3. Operación sobre señales: Transformaciones Múltiples
1.3.5 Transformaciones Múltiples
PROCEDIMIENTO (Caso Especial)
Caso Especial
A
𝒈 𝒕
𝑨𝒈 𝒕
Desplazamiento
en el Tiempo
Escalamiento
en Amplitud
Ejemplo: Obtener 𝟑𝒈 −𝟐𝒕 − 𝟏
𝒕 → 𝒕 − 𝒕𝒐
𝑨𝒈(𝒕 − 𝒕𝟎 )
𝒕 → 𝒃𝒕
𝑨𝒈 𝒃𝒕 − 𝒕𝟎
Escalamiento
en el Tiempo
𝒈 𝒕
𝒕
𝟑𝒈 𝒕
𝒕
𝟑𝒈 𝒕 − 𝟏
𝒕
𝟑𝒈 −𝟐𝒕 − 𝟏
𝒕
Señales y Sistemas
Ing. Diego Peñaloza
36
CAPITULO 1: CONCEPTOS BÁSICOS DE LA TEORIA DE SEÑALES EN TIEMPO CONTÍNUO
1.3. Operación sobre señales: Transformaciones Múltiples
1.3.5 Transformaciones Múltiples
PROCEDIMIENTO NORMAL
𝒈 𝒕
A
𝑨𝒈 𝒕
Escalamiento
en Amplitud
𝒕 → 𝒕/𝒂
𝑨𝒈
Escalamiento
en el Tiempo
𝒕 → 𝒕 − 𝒕𝒐
𝒕
𝒂
𝑨𝒈
𝒕 − 𝒕𝟎
𝒂
Desplazamiento
en el Tiempo
PROCEDIMIENTO (Caso Especial)
𝒈 𝒕
A
Escalamiento
en Amplitud
Señales y Sistemas
𝑨𝒈 𝒕
𝒕 → 𝒕 − 𝒕𝒐
Desplazamiento
en el Tiempo
𝑨𝒈(𝒕 − 𝒕𝟎 )
𝒕 → 𝒃𝒕
𝑨𝒈 𝒃𝒕 − 𝒕𝟎
Escalamiento
en el Tiempo
Ing. Diego Peñaloza
37
CAPITULO 1: CONCEPTOS BÁSICOS DE LA TEORIA DE SEÑALES EN TIEMPO CONTÍNUO
1.3. Operación sobre señales: Transformaciones Múltiples
Ejercicios recomendados del Capítulo 2 de Ashok Ambardar
Señales y Sistemas
Ing. Diego Peñaloza
38
CAPITULO 1: CONCEPTOS BÁSICOS DE LA TEORIA DE SEÑALES EN TIEMPO CONTÍNUO
1.3. Operación sobre señales: Transformaciones Múltiples
GRACIAS
Fin 2 da Clase
Señales y Sistemas
Ing. Diego Peñaloza
39
SEÑALES Y SISTEMAS
CAPITULO 1
CONCEPTOS BÁSICOS DE LA TEORIA DE SEÑALES EN TIEMPO CONTÍNUO
1.1. Definición de señales en tiempo continuo y discreto.
1.2. Clasificación de señales
1.3. Operación sobre señales: Transformaciones Múltiples.
1.4. Funciones de señales en tiempo continuo.
1.4.1. Funciones Sinusoidales
1.4.2. Funciones Exponenciales: Fórmulas de Euler
1.4.3. Funciones Singulares y Relacionales
a) Función Sinc
b) Función Escalón Unitario
c) Función Signum
d) Función Rampa
e) Función Rectángulo Unitario
f) Función Triángulo Unitario
d) Función Impulso
1.4.4. Diferenciación e integración de señales.
1.5 Funciones par e impar de tiempo continuo.
1.6. Funciones periódicas en tiempo continuo.
1.7. Energía y Potencia de la señal.
Señales y Sistemas
Ing. Diego Peñaloza
40
CAPITULO 1: CONCEPTOS BÁSICOS DE LA TEORIA DE SEÑALES EN TIEMPO CONTÍNUO
1.4. Función de Señales en tiempo continuo
Recordemos algunas de la funciones conocidas hasta ahora
1.4.1 Funciones Senoidales
𝑥 𝑡 = 𝐴𝐶𝑜𝑠 𝝎𝟎 𝑡 + 𝜑 + 𝐵
𝝎𝟎 =
𝑥(𝑡)
2𝜋
= 2𝜋𝑓0
𝑇0
𝑇𝑜 =
2𝜋
𝟂0
A
A Cos 𝜑
…
…
t
Donde:
A = amplitud de la senoide
To = periodo fundamental real de la
senoide, segundos.
fo = frecuencia fundamental real de la
senoide, Hz o ciclos /s.
ωo = frecuencia fundamental real de una
senoide, rad/s
𝜑 = desfasamiento, rad.
t = tiempo continuo, variable
B = desplazamiento vertical en el eje 𝑥 𝑡
offset o nivel de continua (dc)
Con B =0
Señales y Sistemas
Ing. Diego Peñaloza
41
CAPITULO 1: CONCEPTOS BÁSICOS DE LA TEORIA DE SEÑALES EN TIEMPO CONTÍNUO
1.4. Función de Señales en tiempo continuo
1.4.1 Funciones Sinusoidales
Ejercicios:
1. Graficar un ciclo completo de cada señal a mano alzada indicando los
puntos más significativos (como los puntos de corte con los ejes y sus
coordenadas de máximos y mínimos).
1)
2)
3)
4)
Señales y Sistemas
𝑥 𝑡 = 𝐶𝑜𝑠 (2𝜋𝑡)
𝑥 𝑡 = 2𝑆𝑒𝑛 12𝜋𝑡 + 3
𝜋
𝑥 𝑡 = 2𝐶𝑜𝑠 𝜋𝑡 + − 3
3
𝑥 𝑡 = 𝑡 ∙ 𝐶𝑜𝑠 (2𝜋𝑡)
Ing. Diego Peñaloza
42
CAPITULO 1: CONCEPTOS BÁSICOS DE LA TEORIA DE SEÑALES EN TIEMPO CONTÍNUO
1.4. Función de Señales en tiempo continuo
1.4.2 Funciones Exponenciales
En forma general tenemos:
Donde:
A = amplitud de la senoide
ω = frecuencia fundamental
real de una senoide, rad/s
t = tiempo continuo, variable
σ = velocidad de amortiguamiento
real, constante.
𝑔 𝑡 = 𝐴𝑒 𝜎+𝑗𝜔 𝑡
𝒈 𝒕 = 𝑨𝒆𝝈𝒕 𝒆𝒋𝝎𝒕
𝑔 𝑡 = 𝐴𝑒 𝜎𝑡 cos 𝜔𝑡 + 𝑗 sin 𝜔𝑡
𝑔 𝑡 = 𝐴𝑒 𝜎𝑡 cos 𝜔𝑡 + 𝐴𝑒 𝜎𝑡 𝑗 sin 𝜔𝑡
Re {𝒈 𝒕 } = 𝑨𝒆𝝈𝒕 𝒄𝒐𝒔 𝝎𝒕
Im {𝒈 𝒕 } = 𝑨𝒆𝝈𝒕 𝒔𝒊𝒏 𝝎𝒕
Im {𝒈 𝒕 }
Re {𝒈 𝒕 }
A
−
2𝜋
0
𝟂
-A
Señales y Sistemas
2𝜋
4𝜋
𝟂
𝟂
−𝒆𝝈𝒕
𝒆𝝈𝒕
A
𝒆𝝈𝒕
t
−
2𝜋
0
𝟂
-A
2𝜋
4𝜋
𝟂
𝟂
t
−𝒆𝝈𝒕
Ing. Diego Peñaloza
43
CAPITULO 1: CONCEPTOS BÁSICOS DE LA TEORIA DE SEÑALES EN TIEMPO CONTÍNUO
1.4. Función de Señales en tiempo continuo
1.4.2 Funciones Exponenciales
Ejemplo: Representación tridimensional con con 𝜎 = 0
Señales y Sistemas
Ing. Diego Peñaloza
44
CAPITULO 1: CONCEPTOS BÁSICOS DE LA TEORIA DE SEÑALES EN TIEMPO CONTÍNUO
1.4. Función de Señales en tiempo continuo
1.4.2 Funciones Exponenciales
Ejemplo:
1. Graficar las siguientes funciones a mano alzada e indicar los puntos mas significativos.
5) 𝑔 𝑡 = 𝑒 𝑡
6) 𝑔 𝑡 = 5𝑒 𝑡−2
7) 𝑔 𝑡 = 𝑒 −𝑡
8) 𝑔 𝑡 = 10𝑒 −𝑡−2
9) 𝑔 𝑡 = 1 − 𝑒 −𝑡
10) 𝑔 𝑡 = 𝑡𝑒 −𝑡
11) 𝑔 𝑡 = 𝑒 − 𝑡
12) 𝑔 𝑡 = 𝑒 𝑡
Señales y Sistemas
Ing. Diego Peñaloza
45
CAPITULO 1: CONCEPTOS BÁSICOS DE LA TEORIA DE SEÑALES EN TIEMPO CONTÍNUO
1.4. Función de Señales en tiempo continuo
1.4.3 Funciones Singulares y Relacionales
En el análisis de señales y sistemas existe un conjunto de funciones que se relacionan entre sí a
través de integrales y derivadas que pueden utilizarse para describir matemáticamente señales que
tienen discontinuidades o derivadas discontinuas. Éstas reciben el nombre de funciones singulares.
a) La función Sinc unitaria:
𝒔𝒊𝒏𝒄 𝒕 =
Para evaluar en T=0,
recurrimos a la regla de
L´Höpital
𝐬𝐢𝐧(𝝅𝒕)
𝝅𝒕
𝑠𝑖𝑛𝑐 𝑡
𝑆𝑒𝑛(𝜋𝑡)
𝑡→0
𝜋𝑡
lim 𝑠𝑖𝑛𝑐 𝑡 = lim
𝑡→0
1
= lim
𝑡→0
𝜋𝐶𝑜𝑠(𝜋𝑡)
𝜋
=1
Área= 1,
Altura 1,
Los ceros corresponden a los ceros de 𝐬𝐢𝐧(𝝅𝒕)
t
-5
Señales y Sistemas
-4
-3
-2 -1
0
1
2
3
4
5
Ing. Diego Peñaloza
46
CAPITULO 1: CONCEPTOS BÁSICOS DE LA TEORIA DE SEÑALES EN TIEMPO CONTÍNUO
1.4. Función de Señales en tiempo continuo
1.4.3 Funciones Singulares y Relacionales
a) La función Sinc unitaria:
Graficar estas señales en Matlab y explicar sus parecido y sus diferencias.
𝑆𝑖𝑛𝑐(𝑡)
𝑆𝑒𝑛 π𝑡
π𝑡
𝑆𝑒𝑛 π𝑡
𝑡
Señales y Sistemas
Ing. Diego Peñaloza
47
CAPITULO 1: CONCEPTOS BÁSICOS DE LA TEORIA DE SEÑALES EN TIEMPO CONTÍNUO
1.4. Función de Señales en tiempo continuo
1.4.3 Funciones Singulares y Relacionales
b) La función Escalón Unitario
La función escalón unitario en tiempo continuo
se define como:
𝒖 𝒕 =
0,
∀𝑡 < 0
1,
∀𝑡 > 0
𝒖 𝒕
1
0
t
-1
Señales y Sistemas
Ing. Diego Peñaloza
48
CAPITULO 1: CONCEPTOS BÁSICOS DE LA TEORIA DE SEÑALES EN TIEMPO CONTÍNUO
1.4. Función de Señales en tiempo continuo
1.4.3 Funciones Singulares y Relacionales
b) La función Escalón Unitario
La función escalón unitario en tiempo continuo
se define como:
𝒖 𝒕 =
0,
∀𝑡 < 0
1,
∀𝑡 > 0
𝒖 𝒕
1
0
t
-1
Ejemplos:
Graficar cada una de las siguientes funciones.
11) x(t)=4u(t)
12) x(t)= -4u(t)
13) x(t)= 5u(t/2)
14) x(t)= 5u(2t)
15) x(t)= 3u(t-2)
16) x(t)= 4u(t+2)
17) x(t)= u(t) + u(t-2)
18) x(t)= u(t)- u(t-1)
Señales y Sistemas
Ing. Diego Peñaloza
49
CAPITULO 1: CONCEPTOS BÁSICOS DE LA TEORIA DE SEÑALES EN TIEMPO CONTÍNUO
1.4. Función de Señales en tiempo continuo
1.4.3 Funciones Singulares y Relacionales
c) La función Signum
La función signum se relaciona estrechamente con la función escalón unitario. Para
argumentos distintos de cero, el valor de la función signum tiene una magnitud de uno y un
signo que es igual al de su argumento. Por esta razón algunas veces recibe el nombre de
función de signo
𝒔𝒈𝒏 𝒕 =
-1,
0,
1,
∀𝑡 < 0
∀𝑡 = 0
∀𝑡 > 0
𝒔𝒈𝒏 𝒕 = 𝟐𝒖 𝒕 − 𝟏
Comprobar gráficamente
𝒔𝒈𝒏 𝒕
𝒔𝒈𝒏 𝒕
1
1
0
-1
Señales y Sistemas
t
t
0
-1
Ing. Diego Peñaloza
50
CAPITULO 1: CONCEPTOS BÁSICOS DE LA TEORIA DE SEÑALES EN TIEMPO CONTÍNUO
1.4. Función de Señales en tiempo continuo
1.4.3 Funciones Singulares y Relacionales
c) La función Signum
Ejemplo: Graficar las siguientes funciones
19) g(t)= Sgn(t) como la suma de dos escalones
20) g(t)= 3Sgn(t)
21) g(t)= -3Sgn(t)
22) g(t)= 3Sgn(t-4)
23) g(t)= 3Sgn(-t)
Señales y Sistemas
Ing. Diego Peñaloza
51
CAPITULO 1: CONCEPTOS BÁSICOS DE LA TEORIA DE SEÑALES EN TIEMPO CONTÍNUO
1.4. Función de Señales en tiempo continuo
1.4.3 Funciones Singulares y Relacionales
d) La función Rampa
Otro tipo de señal que se usa en los sistemas es una que se activa en algún tiempo y cambia
linealmente a partir de ese tiempo, o una que cambia linealmente antes de un tiempo y se
desactiva en algún instante.
𝑡,
𝑟𝑎𝑚𝑝 𝑡 =
0,
∀𝑡 > 0
∀𝑡 ≤ 0
𝑡
= න 𝑢 𝜆 𝑑𝜆 = 𝑡 𝑢(𝑡)
−∞
𝒖 𝒕 = 𝒓𝒂𝒎𝒑´(𝒕)
𝒓𝒂𝒎𝒑 𝒕
𝒖 𝒕
𝒚 𝒕 =𝒕
1
1
=
.
t
0
t
-1
1
Señales y Sistemas
t
Ing. Diego Peñaloza
52
CAPITULO 1: CONCEPTOS BÁSICOS DE LA TEORIA DE SEÑALES EN TIEMPO CONTÍNUO
1.4. Función de Señales en tiempo continuo
1.4.3 Funciones Singulares y Relacionales
d) La función Rampa
𝑡
𝑟𝑎𝑚𝑝 𝑡
= න 𝑢 𝜆 𝑑𝜆
−∞
= 𝑡 𝑢(𝑡)
3
0
𝑟𝑎𝑚𝑝 3 =
𝑟𝑎𝑚𝑝 𝑡 = 3
= න 𝑢 𝜆 𝑑𝜆
𝑟𝑎𝑚𝑝 5 =
𝑟𝑎𝑚𝑝 𝑡 = 5
= න 𝑢 𝜆 𝑑𝜆
3
= න 0𝑑𝜆 +න 𝑑𝜆 = 0 + 3 = 3
−∞
5
−∞
0
0
5
= න 0𝑑𝜆 +න 𝑑𝜆 = 0 + 5 = 5
−∞
−∞
0
𝒖 𝝀
𝒖 𝝀
1
1
-3 -2
-1
0 1
2
3
4
5
t
-3 -2
-1
0 1
2
3
4
5
t
𝑟𝑎𝑚𝑝 𝑡
5
4
3
2
1
-3 -2
Señales y Sistemas
-1
1
2
3
4
5
t
Ing. Diego Peñaloza
53
CAPITULO 1: CONCEPTOS BÁSICOS DE LA TEORIA DE SEÑALES EN TIEMPO CONTÍNUO
1.4. Función de Señales en tiempo continuo
1.4.3 Funciones Singulares y Relacionales
d) La función Rampa
Ejemplo: Encuentre las funciones rampa que describen estas señales.
24)
26)
Señales y Sistemas
25)
27)
Ing. Diego Peñaloza
54
CAPITULO 1: CONCEPTOS BÁSICOS DE LA TEORIA DE SEÑALES EN TIEMPO CONTÍNUO
1.4. Función de Señales en tiempo continuo
1.4.3 Funciones Singulares y Relacionales
d) La función Rampa
Ejercicio2.16 de Ashok Ambardar:
Sea 𝒓 𝒕 = 𝒓𝒂𝒎𝒑 𝒕 ,
Trazar las siguientes gráficas. ¿ Cuáles de estas señales si es el caso son idénticas?
28) 𝑥 𝑡 = 𝑟(𝑡 − 2)
29) 𝑥 𝑡 = 𝑡𝑢 𝑡 − 2𝑢(𝑡 − 2)
30) 𝑥 𝑡 = 2𝑢 𝑡 − (𝑡 − 2)𝑢(𝑡 − 2)
31) 𝑥 𝑡 = 𝑡𝑢 𝑡 − 2 − 2𝑢(𝑡 − 2)
32) 𝑥 𝑡 = 𝑡𝑢 𝑡 − 2 − 2𝑢(𝑡)
33) 𝑥 𝑡 = (𝑡 − 2)𝑢 𝑡 − 2𝑢(𝑡 − 2)
Señales y Sistemas
Ing. Diego Peñaloza
55
CAPITULO 1: CONCEPTOS BÁSICOS DE LA TEORIA DE SEÑALES EN TIEMPO CONTÍNUO
1.4. Función de Señales en tiempo continuo
GRACIAS
Fin 3 era Clase
Señales y Sistemas
Ing. Diego Peñaloza
56
SEÑALES Y SISTEMAS
CAPITULO 1
CONCEPTOS BÁSICOS DE LA TEORIA DE SEÑALES EN TIEMPO CONTÍNUO
1.1. Definición de señales en tiempo continuo y discreto.
1.2. Clasificación de señales
1.3. Operación sobre señales: Transformaciones Múltiples.
1.4. Funciones de señales en tiempo continuo.
1.4.1. Funciones Sinusoidales
1.4.2. Funciones Exponenciales: Fórmulas de Euler
1.4.3. Funciones Singulares y Relacionales
a) Función Sinc
b) Función Escalón Unitario
c) Función Signum
d) Función Rampa
e) Función Rectángulo Unitario
f) Función Triángulo Unitario
d) Función Impulso
1.4.4. Diferenciación e integración de señales.
1.5 Funciones par e impar de tiempo continuo.
1.6. Funciones periódicas en tiempo continuo.
1.7. Energía y Potencia de la señal.
Señales y Sistemas
Ing. Diego Peñaloza
57
CAPITULO 1: CONCEPTOS BÁSICOS DE LA TEORIA DE SEÑALES EN TIEMPO CONTÍNUO
1.4. Función de Señales en tiempo continuo
1.4.3 Funciones Singulares y Relacionales
e) La función Rectángulo Unitario (área unitaria, altura uno, ancho uno)
𝟏,
𝒓𝒆𝒄𝒕(𝒕) = ቊ
𝟎,
Área = 1,
Altura 1,
Ancho 1
𝒓𝒆𝒄𝒕 𝒕
1
-1/2
Señales y Sistemas
𝒕 < 𝟎. 𝟓
- 0.5 < 𝒕 <0.5
∀ 𝒕 < 𝟎. 𝟓
𝑬𝒏 𝒄𝒖𝒂𝒍𝒒𝒖𝒊𝒆𝒓 𝒐𝒕𝒓𝒐 𝒍𝒂𝒅𝒐
1/2
t
Ing. Diego Peñaloza
58
CAPITULO 1: CONCEPTOS BÁSICOS DE LA TEORIA DE SEÑALES EN TIEMPO CONTÍNUO
1.4. Función de Señales en tiempo continuo
1.4.3 Funciones Singulares y Relacionales
e) La función Rectángulo Unitario (área unitaria, altura uno, ancho uno)
1,
𝑟𝑒𝑐𝑡(𝑡) = ቊ
0,
∀ 𝑡 < 0.5
𝐸𝑛 𝑐𝑢𝑎𝑙𝑞𝑢𝑖𝑒𝑟 𝑜𝑡𝑟𝑜 𝑙𝑎𝑑𝑜
Esta señal de pulso sirve como “ventana” para limitar y dar forma a señales arbitrarias,
ejemplo: 𝑥 𝑡 = 𝑠𝑒𝑛 2𝜋𝑡 𝑟𝑒𝑐𝑡(𝑡 − 0.5)
𝑆𝑒𝑛 2𝜋𝑡
𝑟𝑒𝑐𝑡 𝑡 − 0.5
1
1
0.5 1
1
.
…
…
Señales y Sistemas
𝑥 𝑡
t
=
0.5 1
t
0.5
1
Ing. Diego Peñaloza
t
59
CAPITULO 1: CONCEPTOS BÁSICOS DE LA TEORIA DE SEÑALES EN TIEMPO CONTÍNUO
1.4. Función de Señales en tiempo continuo
1.4.3 Funciones Singulares y Relacionales
e) La función Rectángulo Unitario (área unitaria, altura uno, ancho uno)
1,
𝑟𝑒𝑐𝑡(𝑡) = ቊ
0,
∀ 𝑡 < 0.5
𝐸𝑛 𝑐𝑢𝑎𝑙𝑞𝑢𝑖𝑒𝑟 𝑜𝑡𝑟𝑜 𝑙𝑎𝑑𝑜
Ejemplos: Graficar las siguientes señales:
𝑥 𝑡
𝑥 𝑡
𝑥 𝑡
𝑥 𝑡
𝑥 𝑡
39) 𝑥 𝑡
40) 𝑥 𝑡
34)
35)
36)
37)
38)
Señales y Sistemas
= 𝑟𝑒𝑐𝑡(−𝑡) y evidenciar que es una señal par
= 2𝑟𝑒𝑐𝑡(𝑡)
= 2𝑟𝑒𝑐𝑡(𝑡 − 4)
= 2𝑟𝑒𝑐𝑡(𝑡 + 4)
= −0.5𝑟𝑒𝑐𝑡(𝑡 − 0.5)
= 2𝑟𝑒𝑐𝑡 𝑡 Cos(2 t)
= 2𝑡 𝑟𝑒𝑐𝑡(𝑡 − 1)
Ing. Diego Peñaloza
60
CAPITULO 1: CONCEPTOS BÁSICOS DE LA TEORIA DE SEÑALES EN TIEMPO CONTÍNUO
1.4. Función de Señales en tiempo continuo
1.4.3 Funciones Singulares y Relacionales
e) La función Triángulo Unitario (área unitaria, altura uno, ancho dos)
𝟏− 𝒕 ,
𝒕𝒓𝒊(𝒕) = ቊ
𝟎,
∀𝒕 ≤𝟏
𝑬𝒏 𝒄𝒖𝒂𝒍𝒒𝒖𝒊𝒆𝒓 𝒐𝒕𝒓𝒐 𝒍𝒂𝒅𝒐
𝒕𝒓𝒊 𝒕
-1
Señales y Sistemas
Área= 1,
Altura 1,
Ancho 2,
1
1
t
Ing. Diego Peñaloza
61
CAPITULO 1: CONCEPTOS BÁSICOS DE LA TEORIA DE SEÑALES EN TIEMPO CONTÍNUO
1.4. Función de Señales en tiempo continuo
1.4.3 Funciones Singulares y Relacionales
e) La función Triángulo Unitario (área unitaria, altura uno, ancho dos)
𝑡𝑟𝑖 𝑡
1− 𝑡 ,
𝑡𝑟𝑖(𝑡) = ቊ
0,
1
∀𝑡 ≤1
𝐸𝑛 𝑐𝑢𝑎𝑙𝑞𝑢𝑖𝑒𝑟 𝑜𝑡𝑟𝑜 𝑙𝑎𝑑𝑜
Ejemplos: Graficar las siguientes funciones:
-1
1
t
41) 𝑥 𝑡 = 𝑡𝑟𝑖 −𝑡 , 𝑦 𝑒𝑣𝑖𝑑𝑒𝑛𝑐𝑖𝑎𝑟 𝑞𝑢𝑒 𝑒𝑠 𝑢𝑛𝑎 𝑓𝑢𝑛𝑐𝑖ó𝑛 𝑝𝑎𝑟
42) 𝑥 𝑡 = 2𝑡𝑟𝑖 𝑡
43) 𝑥 𝑡 = 2𝑡𝑟𝑖 𝑡 − 5
44) 𝑥 𝑡 = −2𝑡𝑟𝑖 𝑡 + 5
45) 𝑥 𝑡 = 2𝑡𝑟𝑖 𝑡 − 1 𝑆𝑒𝑛(4𝑡)
46) 𝑥 𝑡 = 𝑡𝑟𝑖 𝑡 + 𝑡𝑟𝑖(𝑡 − 1),
47) Exprese el resultado 46) como una suma de r(t)
48) Exprese el resultado 47) como una suma de u(t)
Señales y Sistemas
Ing. Diego Peñaloza
62
CAPITULO 1: CONCEPTOS BÁSICOS DE LA TEORIA DE SEÑALES EN TIEMPO CONTÍNUO
1.4. Función de Señales en tiempo continuo
1.4.3 Funciones Singulares y Relacionales
f) La función Impulso (función delta o función de Dirac)
Es un pulso estrecho y alto con área finita.
Su duración es cero, su altura infinita y su área es uno.
0,
𝛿(𝑡) = ቊ
∞,
𝑡≠0
𝑡=0
El área bajo la curva se
denomina
intensidad
del
impulso y se coloca entre
paréntesis junto a la flecha para
recordar que es su área y no su
altura.
∞
න 𝛿 𝑡 𝑑𝑡 = 1
−∞
(1)
1ൗ
𝜏
1ൗ
𝜏
Área=1
t
Ancho 𝜏 → 0
Señales y Sistemas
Área=1
Área=1
t
Ancho 𝜏 → 0
t
Ancho 𝜏 → 0
Ing. Diego Peñaloza
63
CAPITULO 1: CONCEPTOS BÁSICOS DE LA TEORIA DE SEÑALES EN TIEMPO CONTÍNUO
1.4. Función de Señales en tiempo continuo
1.4.3 Funciones Singulares y Relacionales
f) La función Impulso (función delta o función de Dirac)
Relación entre el impulso y el escalón unitario
0,
𝛿(𝑡) = ቊ
∞,
𝑡≠0
𝑡=0
𝛿(𝑡) =
𝑑𝑢(𝑡)
𝑑𝑡
𝑡
∞
𝑢(𝑡) = න 𝛿 𝑡 𝑑𝑡
න 𝛿 𝑡 𝑑𝑡 = 1
−∞
−∞
(1)
Ejemplos:
Graficar las siguientes funciones:
Área=1
Ancho 𝜏
Señales y Sistemas
t
47) 5𝛿 𝑡
48) 𝛿(𝑡 − 5)
49) 𝛿 𝑡 + 5
50) −𝛿(𝑡 − 3)
Ing. Diego Peñaloza
64
CAPITULO 1: CONCEPTOS BÁSICOS DE LA TEORIA DE SEÑALES EN TIEMPO CONTÍNUO
1.4. Función de Señales en tiempo continuo
1.4.3 Funciones Singulares y Relacionales
f) La función Impulso (función delta o función de Dirac)
(1)
o TRES PROPIEDADES DEL IMPULSO:
Área=1
1. La propiedad de Escalamiento
𝛿 𝛼 𝑡−𝛽
=
t
1
𝛿(𝑡 − 𝛽)
𝛼
Ancho 𝜏
2. La propiedad del producto o equivalencia
𝑥 𝑡 𝛿 𝑡 − 𝛼 = 𝑥 𝛼 𝛿(𝑡 − 𝛼)
si α = 0
𝑥 𝑡 𝛿 𝑡 = 𝑥 0 𝛿(𝑡)
3. Propiedad del filtrado o de muestreo
∞
න 𝑥 𝑡 𝛿 𝑡 − 𝛼 𝑑𝑡 = 𝑥(𝛼)
−∞
Señales y Sistemas
∞
si α = 0
න 𝑥 𝑡 𝛿 𝑡 𝑑𝑡 = 𝑥(0)
−∞
Ing. Diego Peñaloza
65
CAPITULO 1: CONCEPTOS BÁSICOS DE LA TEORIA DE SEÑALES EN TIEMPO CONTÍNUO
1.4. Función de Señales en tiempo continuo
1.4.3 Funciones Singulares y Relacionales
f) La función Impulso (función delta o función de Dirac)
o TRES PROPIEDADES DEL IMPULSO:
(1)
Área=1
1. La propiedad de Escalamiento
𝛿 𝛼 𝑡−𝛽
t
1
=
𝛿(𝑡 − 𝛽)
𝛼
Ancho 𝜏
(1/|𝜶|)
t
𝜷
Señales y Sistemas
Ing. Diego Peñaloza
66
CAPITULO 1: CONCEPTOS BÁSICOS DE LA TEORIA DE SEÑALES EN TIEMPO CONTÍNUO
1.4. Función de Señales en tiempo continuo
1.4.3 Funciones Singulares y Relacionales
f) La función Impulso (función delta o función de Dirac)
o TRES PROPIEDADES DEL IMPULSO:
2. La propiedad del producto o equivalencia
𝑥 𝑡 𝛿 𝑡 − 𝛼 = 𝑥 𝛼 𝛿(𝑡 − 𝛼)
𝑥 𝑡
𝑥 𝑡 𝛿 𝑡−𝛼
𝛿 𝑡−𝛼
(1)
.
t
𝜶
=
𝒙 𝜶 𝜹 𝒕−𝜶
=
(1)
t
𝜶
t
(𝑥 𝛼 )
𝜶
t
𝑥 0 𝛿(𝑡)
si α = 0
𝑥 𝑡 𝛿 𝑡 = 𝑥 0 𝛿(𝑡)
Señales y Sistemas
t
Ing. Diego Peñaloza
67
CAPITULO 1: CONCEPTOS BÁSICOS DE LA TEORIA DE SEÑALES EN TIEMPO CONTÍNUO
1.4. Función de Señales en tiempo continuo
1.4.3 Funciones Singulares y Relacionales
f) La función Impulso (función delta o función de Dirac)
o TRES PROPIEDADES DEL IMPULSO:
3. Propiedad del filtrado o de muestreo
∞
න 𝑥 𝑡 𝛿 𝑡 − 𝛼 𝑑𝑡 = 𝑥(𝛼)
∞
𝑥(𝛼) න 𝛿 𝑡 − 𝛼 𝑑𝑡 = 𝑥(𝛼)
−∞
−∞
1
∞
න
(𝑥 𝛼 )
−∞
𝜶
𝑥 𝛼
=
t
si α = 0
t
𝜶
𝑥 0
∞
න 𝑥 𝑡 𝛿 𝑡 𝑑𝑡 = 𝑥(0)
−∞
Señales y Sistemas
t
Ing. Diego Peñaloza
68
CAPITULO 1: CONCEPTOS BÁSICOS DE LA TEORIA DE SEÑALES EN TIEMPO CONTÍNUO
1.4. Función de Señales en tiempo continuo
1.4.4 derivación e integración de funciones
•
•
•
•
La derivada de una función es la pendiente en el instante t.
Integral es el área acumulada bajo la curva hasta el instante t.
La derivada es inequívoca, mientras,
La integral no se determina de manera única, requiere de información adicional,
“condiciones iniciales”.
𝑥 𝑡 →
𝑑
𝑥 𝑡
𝑑𝑡
= 𝑥´ 𝑡
K es una
constante
𝑥´ 𝑡 → න 𝑥´ 𝑡 𝑑𝑡 = 𝑥 𝑡 + 𝑘
Antiderivada K=0
Por lo general se considera que la función es cero para tiempos anteriores a un t0
Señales y Sistemas
Ing. Diego Peñaloza
69
CAPITULO 1: CONCEPTOS BÁSICOS DE LA TEORIA DE SEÑALES EN TIEMPO CONTÍNUO
1.4. Función de Señales en tiempo continuo
1
1
𝑥 𝑡
x (t)
x (t)
𝒙 𝒕 = 𝒕𝒓𝒊(𝒕)
𝑥 𝑡 = 1 + 𝑡 𝑢 𝑡 + 1 − 𝑢(𝑡)
-1
-1
1
1
(1 − 𝑡) 𝑢 𝑡 − 𝑢(𝑡 − 1)
t
t
𝑥′ 𝑡 = 1 𝑢 𝑡 + 1 − 𝑢 𝑡 + 1 + 𝑡 𝛿 𝑡 + 1 − 𝛿 𝑡
x’(t)
𝑥´ 𝑡
x’(t)
1
1
−1 𝑢 𝑡 − 𝑢 𝑡 − 1
t
t
-1
-1
1
1
+
+ (1 − 𝑡) 𝛿 𝑡 − 𝛿 𝑡 − 1
𝑥 ′ 𝑡 = 𝑢 𝑡 + 1 − 𝑢 𝑡 + 1 + 𝑡 |𝑡=−1 𝛿 𝑡 + 1 − 1 + 𝑡 |𝑡=0 𝛿 𝑡
+
−1 𝑢 𝑡 − 𝑢 𝑡 − 1 + (1 − 𝑡)|𝑡=0 𝛿 𝑡 − (1 − 𝑡)|𝑡=1 𝛿 𝑡 − 1
𝑥′ 𝑡 = 𝑢 𝑡 + 1 − 𝑢 𝑡
x (t)
x (t)
+
+0 +𝛿 𝑡 −𝑢 𝑡 +𝑢 𝑡−1 +𝛿 𝑡
𝒙′ 𝒕 = 𝒖 𝒕 + 𝟏 − 𝟐𝒖 𝒕 + 𝒖 𝒕 − 𝟏
𝑥´´ 𝑡
-11
-1
1
1
1
t
t
𝒙′ ′ 𝒕 = 𝜹 𝒕 + 𝟏 − 𝟐𝜹 𝒕 + 𝜹 𝒕 − 𝟏
𝑡
−2
Señales y Sistemas
Ing. Diego Peñaloza
70
CAPITULO 1: CONCEPTOS BÁSICOS DE LA TEORIA DE SEÑALES EN TIEMPO CONTÍNUO
1.4. Función de Señales en tiempo continuo
1.4.4 derivación e integración de funciones
Ejercicios recomendados del Capítulo 2 de Ashok Ambardar
1. Realizar paso a paso el ejemplo 2.7 pag 24 del texto guía en todos su literales
2. Graficar las siguientes señales
51) 𝑥 𝑡 = 3𝛿(𝑡 − 2)
52) 𝑥 𝑡 = 3𝛿(2𝑡 − 2)
53) 𝑥 𝑡 = 3𝑡𝛿(𝑡 − 2)
54) 𝑥 𝑡 = 3𝑡𝛿(2𝑡 − 2)
3. Evalúe las siguientes integrales
∞
2
55) න
4 − 𝑡 2 𝛿 𝑡 + 4 𝑑𝑡
56) න
−∞
−3
6
𝑡
57) න
−3
Señales y Sistemas
4 − 𝑡 𝛿 𝑡 + 3 𝑑𝑡
6
6 − 𝑡 2 [𝛿 𝑡 + 4 + 2𝛿(2𝑡 + 4)]𝑑𝑡
58) න [𝛿 𝑡 + 2 − 𝛿(𝑡 − 2)]𝑑𝑡
−∞
Ing. Diego Peñaloza
71
CAPITULO 1: CONCEPTOS BÁSICOS DE LA TEORIA DE SEÑALES EN TIEMPO CONTÍNUO
1.4. Función de Señales en tiempo continuo
Ejercicios recomendados del Capítulo 2 de Ashok Ambardar
Señales y Sistemas
Ing. Diego Peñaloza
72
CAPITULO 1: CONCEPTOS BÁSICOS DE LA TEORIA DE SEÑALES EN TIEMPO CONTÍNUO
1.4. Función de Señales en tiempo continuo
Ejercicios recomendados del Capítulo 2 de Ashok Ambardar
2.12 (Derivadas Generalizadas) Dibuje las señales 𝑥 𝑡 y 𝑥′ 𝑡 respecto a lo siguiente:
2.17 (Señales y derivadas) Dibuje cada señal 𝑥 𝑡 y represéntela como una combinación lineal
de funciones escalones y/o rampas donde sea posible y obtenga su derivada.
Señales y Sistemas
Ing. Diego Peñaloza
73
CAPITULO 1: CONCEPTOS BÁSICOS DE LA TEORIA DE SEÑALES EN TIEMPO CONTÍNUO
1.4. Función de Señales en tiempo continuo
GRACIAS
Fin 4 ta Clase
Señales y Sistemas
Ing. Diego Peñaloza
74
SEÑALES Y SISTEMAS
CAPITULO 1
CONCEPTOS BÁSICOS DE LA TEORIA DE SEÑALES EN TIEMPO CONTÍNUO
1.1. Definición de señales en tiempo continuo y discreto.
1.2. Clasificación de señales
1.3. Operación sobre señales: Transformaciones Múltiples.
1.4. Funciones de señales en tiempo continuo.
1.5. Funciones par e impar de tiempo continuo.
1.5.1 Simetría Par
1.5.2 Simetría Impar
1.5.3 Asimetría
1.5.4 Parte par y parte impar de señales
1.5.5 Suma y Producto de dos señales
1.5.6 Derivación de funciones pares
1.5.7 Integración de funciones pares
1.6. Funciones periódicas en tiempo continuo.
1.7. Energía y Potencia de la señal.
Señales y Sistemas
Ing. Diego Peñaloza
75
CAPITULO 1: CONCEPTOS BÁSICOS DE LA TEORIA DE SEÑALES EN TIEMPO CONTÍNUO
1.5. Función Par e Impar en tiempo continuo
1.5.1 Simetría Par
Cuando la señal es idéntica a su versión reflejada:
𝒙 𝒕 = 𝒙 −𝒕
Par
La parte derecha de la señal es idéntica a la izquierda, como si fueran el reflejo de
un espejo alrededor del eje vertical (t=0).
Ejemplo:
𝒈(𝒕)
𝑥 𝑡
𝒔𝒊𝒏𝒄 𝒕
1
4
3
1/τ
Área= 1,
Altura 1,
2
1
-4
-3
-2
-1
0
1
2
3
4
5
-1
-τ
τ
t
t
t
-5
-4
-3
-2 -1
0
1
2
3
4
5
-2
-3
-4
Señales y Sistemas
Ing. Diego Peñaloza
76
CAPITULO 1: CONCEPTOS BÁSICOS DE LA TEORIA DE SEÑALES EN TIEMPO CONTÍNUO
1.5. Función Par e Impar en tiempo continuo
1.5.2 Simetría Impar
Cuando la señal y su versión reflejada en el eje t=0 difieren únicamente en el
signo:
𝒙 𝒕 = −𝒙 −𝒕
Impar
La parte derecha de la señal gira sobre el eje vertical y luego sobre el eje
horizontal.
Ejemplo:
?
𝒈(𝒕)
𝒙 𝒕
−𝟒𝒔𝒆𝒏
1/τ
𝝅
𝒕
𝟐
4
3
2
4
3
1
2
-4
1
-τ
τ
t
-4
-3
-2
-1
0 1
-1
-2
-3
-4
Señales y Sistemas
2
3
4
5
-3
-2
-1
0
1
2
3
4
5
-1
t
t
-2
-3
-4
Ing. Diego Peñaloza
77
CAPITULO 1: CONCEPTOS BÁSICOS DE LA TEORIA DE SEÑALES EN TIEMPO CONTÍNUO
1.5. Función Par e Impar en tiempo continuo
1.5.3 Asimetría
Si no se cumple ninguna de las condiciones anteriores la señal no tiene simetría.
Se le llama también asimétrica.
Señales y Sistemas
Ing. Diego Peñaloza
78
CAPITULO 1: CONCEPTOS BÁSICOS DE LA TEORIA DE SEÑALES EN TIEMPO CONTÍNUO
1.5. Función Par e Impar en tiempo continuo
1.5.4 Descomponer una función como la suma de parte PAR y parte IMPAR
Cualquier función 𝑥(𝑡) puede expresarse como la suma de una parte par y una parte impar.
*La simetría Par y la simetría Impar son mutuamente excluyentes.
𝒙 𝒕 = 𝒙𝒆 𝒕 + 𝒙𝟎 (𝒕)
Parte Impar
𝒙 𝒕 − 𝒙 −𝒕
𝒙𝟎 𝒕 =
𝟐
Par (even) + Impar (odd)
Parte Par
𝒙𝒆 𝒕 =
Si 𝒙 𝒕 es Par {𝒙 𝒕 = 𝒙 −𝒕 } debe
cumplirse que:
𝒙 𝒕 + 𝒙 −𝒕
𝟐
Si 𝒙 𝒕 es Impar { 𝒙 𝒕 = −𝒙 −𝒕 } debe
cumplirse que:
𝒙𝒆 𝒕 =
𝒙 𝒕 + 𝒙 −𝒕
𝒙 𝒕 +𝒙 𝒕
=
𝟐
𝟐
=𝒙 𝒕
𝒙𝒆 𝒕 =
𝒙 𝒕 + 𝒙 −𝒕
𝒙 𝒕 −𝒙 𝒕
=
𝟐
𝟐
𝒙𝟎 𝒕 =
𝒙 𝒕 −𝒙 𝒕
𝒙 𝒕 − 𝒙 −𝒕
=
𝟐
𝟐
=𝟎
𝒙𝟎 𝒕 =
𝒙 𝒕 +𝒙 𝒕
𝒙 𝒕 − 𝒙 −𝒕
=
=𝒙 𝒕
𝟐
𝟐
Señales y Sistemas
=𝟎
Ing. Diego Peñaloza
79
CAPITULO 1: CONCEPTOS BÁSICOS DE LA TEORIA DE SEÑALES EN TIEMPO CONTÍNUO
1.5. Función Par e Impar en tiempo continuo
1.5.5 Suma y Producto de dos señales
Señales Pares
𝒙𝒆 𝒕 + 𝒚𝒆 𝒕 = 𝑺𝒊𝒎𝒆𝒕𝒓í𝒂 𝑷𝒂𝒓
𝒙𝒆 𝒕 ∗ 𝒚𝒆 𝒕 = 𝑺𝒊𝒎𝒆𝒕𝒓í𝒂 𝑷𝒂𝒓
(Como la ley de los signos)
Señales Impares
𝒙𝟎 𝒕 + 𝒚𝟎 𝒕 = 𝑺𝒊𝒎𝒆𝒕𝒓í𝒂 𝑰𝒎𝒑𝒂𝒓
𝒙𝟎 𝒕 ∗ 𝒚𝟎 𝒕 = 𝑺𝒊𝒎𝒆𝒕𝒓í𝒂 𝑷𝒂𝒓
(Como la ley de los signos)
Combinación
𝒙𝒆 𝒕 + 𝒚𝟎 𝒕 = 𝑺𝒊𝒏 𝑺𝒊𝒎𝒆𝒕𝒓í𝒂
𝒙𝒆 𝒕 ∗ 𝒚𝟎 𝒕 = 𝑺𝒊𝒎𝒆𝒕𝒓í𝒂 𝑰𝒎𝒑𝒂𝒓
(Asimétrica)
(Como la ley de los signos)
Señales y Sistemas
Ing. Diego Peñaloza
80
CAPITULO 1: CONCEPTOS BÁSICOS DE LA TEORIA DE SEÑALES EN TIEMPO CONTÍNUO
1.5. Función Par e Impar en tiempo continuo
1.5.6 Derivación de funciones pares
FUNCION PAR
FUNCION IMPAR
La derivada de cualquier función par
es una función impar.
La derivada de cualquier función impar
es una función par.
𝑔𝑒 𝑡 = 𝑔 −𝑡
𝑔𝑜 𝑡 = −𝑔 −𝑡
𝑑
𝑔 𝑡
𝑑𝑡 𝑒
𝑑
=
𝑔 −𝑡
𝑑𝑡
𝑑
𝑔 𝑡
𝑑𝑡 𝑒
𝑑
=−
𝑔 −𝑡
𝑑𝑡
𝑑
×
−𝑡
𝑑𝑡
∴ 𝐸𝑠 𝑢𝑛𝑎 𝐹𝑢𝑛𝑐𝑖ó𝑛 𝑖𝑚𝑝𝑎𝑟
Señales y Sistemas
𝑑
𝑔 𝑡
𝑑𝑡 𝑜
=−
𝑑
𝑔 𝑡
𝑑𝑡 𝑒
=
𝑑
𝑔 −𝑡
𝑑𝑡
×
𝑑
−𝑡
𝑑𝑡
𝑑
𝑔 −𝑡
𝑑𝑡
∴ 𝐸𝑠 𝑢𝑛𝑎 𝐹𝑢𝑛𝑐𝑖ó𝑛 𝑝𝑎𝑟
Ing. Diego Peñaloza
81
CAPITULO 1: CONCEPTOS BÁSICOS DE LA TEORIA DE SEÑALES EN TIEMPO CONTÍNUO
1.5. Función Par e Impar en tiempo continuo
1.5.7 Integración de funciones pares
La integral de cualquier función par es una función impar, mas una constante de integración,
La integral de cualquier función impar es una función par, mas una constante de integración.
Salvo por la posible constante aditiva, las integrales de funciones par e impar son,
respectivamente, impar y par.
Matemáticamente se cumplen las siguientes integrales para funciones pares e impares:
𝑎
𝑎
𝑎
න 𝑔𝑒 𝑡 𝑑𝑡 = 2 න 𝑔𝑒 𝑡 𝑑𝑡
න 𝑔𝑜 𝑡 𝑑𝑡 = 0
−𝑎
−𝑎
0
Odd go(t)
Even ge(t)
Área 1
Área 2
Área 2
-a
a
-a
Área 1 = Área 2
Señales y Sistemas
t
a
Área 1
t
Área 1 = - Área 2
Ing. Diego Peñaloza
82
CAPITULO 1: CONCEPTOS BÁSICOS DE LA TEORIA DE SEÑALES EN TIEMPO CONTÍNUO
1.5. Función Par e Impar en tiempo continuo
Mini Test
¿Qué tipos de simetría hay?
¿Cómo se determina si una señal tiene simetría?
¿Al combinar señales con una simetría dada, que simetría
tiene la resultante?
¿Cómo se descompone una señal asimétrica en sus
componentes par e impar?
Señales y Sistemas
Ing. Diego Peñaloza
83
CAPITULO 1: CONCEPTOS BÁSICOS DE LA TEORIA DE SEÑALES EN TIEMPO CONTÍNUO
1.5. Función Par e Impar en tiempo continuo
Ejercicios en Clase
Resolver el ejercicio 48 del Capítulo 2 Roberts, graficando sus componentes.
Resolver el ejercicio 2.2 de Ambardar, graficando sus componentes.
Señales y Sistemas
Ing. Diego Peñaloza
84
CAPITULO 1: CONCEPTOS BÁSICOS DE LA TEORIA DE SEÑALES EN TIEMPO CONTÍNUO
1.5. Función Par e Impar en tiempo continuo
GRACIAS
Fin 5 ta Clase
Señales y Sistemas
Ing. Diego Peñaloza
85
SEÑALES Y SISTEMAS
CAPITULO 1
CONCEPTOS BÁSICOS DE LA TEORIA DE SEÑALES EN TIEMPO CONTÍNUO
1.1. Definición de señales en tiempo continuo y tiempo discreto.
1.2. Clasificación de señales
1.3. Operaciones sobre señales: Transformaciones Múltiples
1.4. Funciones de señales en tiempo continuo.
1.5. Funciones par e impar de tiempo continuo.
1.6. Funciones periódicas en tiempo continuo.
1.7. Energía y Potencia de la señal.
Señales y Sistemas
Ing. Diego Peñaloza
86
CAPITULO 1: CONCEPTOS BÁSICOS DE LA TEORIA DE SEÑALES EN TIEMPO CONTÍNUO
1.6. Función Periódicas en tiempo continuo
Cuando la forma (patrón) de una señal se repite una y otra vez desde −∞ 𝑎 + ∞ es periódica.
Sus valores se repiten después de un cierto intervalo nT, donde n es un numero entero, y si T es el
intervalo mínimo posible, entonces es el periodo fundamental To.
Una función periódica se mantiene invariante con la transformación: 𝑡 → 𝑡 + 𝑛𝑇
𝑔 𝑡 = 𝑔(𝑡 + 𝑛𝑇)
Aquella función que no cumple con esto se llama aperiódica.
La frecuencia es el recíproco del periodo f = 1/To, es el numero de ciclos o repeticiones por segundo,
se mide Hercios Hz. La frecuencia angular (o pulsaciones) esta en radianes/segundo:
𝜔 = 2𝜋𝑓
Ejemplos:
Señales y Sistemas
Existen otras funciones periódicas cuyo frecuencia
angular es 𝜔 = 𝞹f, como la función Tangente
Ing. Diego Peñaloza
87
CAPITULO 1: CONCEPTOS BÁSICOS DE LA TEORIA DE SEÑALES EN TIEMPO CONTÍNUO
1.6. Función Periódicas en tiempo continuo
Ejemplo de calculo:
Determinar los parámetros de una señal sinusoidal:
𝑥 𝑡 = 10𝐶𝑜𝑠(200𝜋𝑡 + 𝜋Τ4)
Cual es la señal ?
2𝜋𝑓0 𝑡 + 𝜑 = 200𝜋𝑡 + 𝜋Τ4
2𝜋𝑓0 𝑡 = 200𝜋𝑡
𝑓0 = 100
𝜑 = 𝜋 Τ4
Señales y Sistemas
Ing. Diego Peñaloza
88
CAPITULO 1: CONCEPTOS BÁSICOS DE LA TEORIA DE SEÑALES EN TIEMPO CONTÍNUO
1.6. Función Periódicas en tiempo continuo
Combinación de sinusoides:
𝑔 𝑡 = 𝑥1 𝑡 + 𝑥2 (𝑡)
•
Cada sinusoide tiene su periodo y frecuencia propia.
•
Hay que buscar el periodo común a todas. Un tiempo en el cual cada sinusoide
complete un número entero de ciclos.
•
El “nuevo” Periodo fundamental T0 para las dos funciones será el mínimo común
múltiplo mcm. La “nueva” frecuencia fundamental f0 será el máximo común divisor
MCD.
•
Esto es posible si hay una razón proporcional entre las frecuencia o periodos. La razón
debe ser una fracción racional. (Cociente de dos enteros)
•
Si no hay tal razón no se puede hallar un período o frecuencia común.
Señales y Sistemas
Ing. Diego Peñaloza
89
CAPITULO 1: CONCEPTOS BÁSICOS DE LA TEORIA DE SEÑALES EN TIEMPO CONTÍNUO
1.6. Función Periódicas en tiempo continuo
Ejemplo: Determinar si la composición de 2 funciones
periódicas es periódica y determinar su valor.
𝑔 𝑡 = −𝑐𝑜𝑠 12𝜋𝑡 + 𝑠𝑒𝑛(18𝜋𝑡)
1
𝑇1 =
6
1
𝑇2 =
9
= −𝑐𝑜𝑠 12𝜋𝑡
𝑇=
Aplicamos el mínimo común múltiplo: mcm
2𝜋
𝜔
1 1
;
6 9
32 ; 2 ∙ 3
9 ;6
9 ;6
≡
≡
≡
54
54
54
En el numerador, tomamos cada base una sola
vez pero con su máximo exponente:
32 ∙ 2
54
=
0
1
1
18
=
3
54
1
∴ 𝑇0 =
3
Esto significa que hasta 𝑇0 las componentes
llegarán oscilando un número entero de ciclos, es
decir:
𝑇 = 𝑛𝑇 = 𝑚𝑇
T1=1/6
n=2
= 𝑠𝑒𝑛(18𝜋𝑡)
T2=1/9
2
1
1
1
=𝑛 =𝑚
6
3
9
En 𝑇0 :
m=3
𝑥1 𝑡 completa n =2 ciclos
𝑥2 𝑡 completa m=3 ciclos
Se cumple con la condición de que la siguiente
expresión sea una fracción racional:
𝑇1 𝑚 3
= =
𝑇2 𝑛
2
𝑇0 =
Señales y Sistemas
1
3
El problema puede resolverse usando las frecuencias en
lugar de los períodos, para lo cual se aplicará el MCD
Ing. Diego Peñaloza
90
CAPITULO 1: CONCEPTOS BÁSICOS DE LA TEORIA DE SEÑALES EN TIEMPO CONTÍNUO
1.6. Función Periódicas en tiempo continuo
Ejercicios recomendados del Capítulo 2 de Ashok Ambardar
Señales y Sistemas
Ing. Diego Peñaloza
91
CAPITULO 1: CONCEPTOS BÁSICOS DE LA TEORIA DE SEÑALES EN TIEMPO CONTÍNUO
1.5. Función Par e Impar en tiempo continuo
GRACIAS
Fin 6 ta Clase
Señales y Sistemas
Ing. Diego Peñaloza
92
SEÑALES Y SISTEMAS
CAPITULO 1
CONCEPTOS BÁSICOS DE LA TEORIA DE SEÑALES EN TIEMPO CONTÍNUO
1.1. Definición de señales en tiempo continuo y tiempo discreto.
1.2. Clasificación de señales
1.3. Operaciones sobre señales: Transformaciones Múltiples
1.4. Funciones de señales en tiempo continuo.
1.5. Funciones par e impar de tiempo continuo.
1.6. Funciones periódicas en tiempo continuo.
1.7. Energía y Potencia de la señal.
Señales y Sistemas
Ing. Diego Peñaloza
93
CAPITULO 1: CONCEPTOS BÁSICOS DE LA TEORIA DE SEÑALES EN TIEMPO CONTÍNUO
1.7. Energía y Potencia de la señal
a
a
Señales y Sistemas
2.
Señal de duración semi-infinita se designan
según a que lado se extienden al infinito.
•
De lado izquierdo.
•
De lado derecho.
3.
Si una señal de lado derecho esta definida
para t>0 y es cero para t<0 se llama causal.
4.
Si esta definida para t<0 es anticausal, o no
causal.
t
a
a
t
Existe otra clasificación de señales por duración y
área.
POR SU DURACIÓN
1. Las señal pueden tener una duración finita
o infinita.
•
Las señal de duración finita se llaman
de tiempo limitado
t
b
t
Ing. Diego Peñaloza
94
CAPITULO 1: CONCEPTOS BÁSICOS DE LA TEORIA DE SEÑALES EN TIEMPO CONTÍNUO
1.7. Energía y Potencia de la señal
POR SU AREA.
1.
El área absoluta de una señal es una medida de su tamaño.
2.
Una señal es absolutamente integrable si tiene área finita.
3.
Todas las señales de tiempo limitado son absolutamente integrables. Este criterio es
usado para verificar la estabilidad en sistemas y la existencia de ciertas transformadas.
Señales y Sistemas
Ing. Diego Peñaloza
95
CAPITULO 1: CONCEPTOS BÁSICOS DE LA TEORIA DE SEÑALES EN TIEMPO CONTÍNUO
1.7. Energía y Potencia de la señal
Energía y Potencia.
La potencia instantánea es:
𝒑𝑖 (𝑡) = 𝒗 𝑡 𝒊(𝑡) = 𝑅𝒊2 (𝑡) =
𝒗2 (𝑡)
𝑅
1. Si consideramos un resistor de 1 ohmio su potencia instantánea es:
𝒑𝑖 (𝑡) = 𝒙2 (𝑡)
Donde 𝒙 𝒕 puede ser un voltaje o la corriente.
2. La energía total se halla la integral la 𝒑𝒊 (𝒕) en el tiempo:
∞
𝑬 = න 𝒑𝒊 (𝒕)𝑑𝑡
−∞
∞
=න
𝒙2 𝑡 𝑑𝑡
−∞
Esto también para señales complejas.
3. La potencia de la señal es el promedio de la energía para todo el tiempo en el que actúa:
Si 𝒙 𝒕 es periódica de período T.
𝑷=
1
න 𝒙2 𝑡 𝑑𝑡
𝑇 𝑇
Si 𝒙 𝒕 es aperiódicas, consideramos un periodo
1
𝑷 = lim
න 𝒙2 𝑡 𝑑𝑡
𝑇→∞ 𝑇 𝑇
Señales y Sistemas
Ing. Diego Peñaloza
96
CAPITULO 1: CONCEPTOS BÁSICOS DE LA TEORIA DE SEÑALES EN TIEMPO CONTÍNUO
1.7. Energía y Potencia de la señal
Una señal con energía finita se denomina señal de energía.
•
•
•
Estas tienen potencia cero, ya que la energía se promedia para el infinito.
Las señales de tiempo limitado son de energía.
También las señales que decaen con el tiempo, ej: exponencial, sinc
Las señales con potencia finita se llaman señal de potencia.
•
•
Estas tienen potencia promedio finita y energía infinita.
P.e: las señales periódicas.
Señales de energía y potencia son mutuamente excluyentes.
GUÍA:
Si E es finita y P=0, la señal es de Energía.
Si E es infinita y P es finita, la señal es de Potencia.
Si E es infinita y P es infinita, la señal no es de Energía ni de Potencia.
Señales y Sistemas
Ing. Diego Peñaloza
97
CAPITULO 1: CONCEPTOS BÁSICOS DE LA TEORIA DE SEÑALES EN TIEMPO CONTÍNUO
1.7. Energía y Potencia de la señal
Ejemplos: Encontrar analíticamente la energía y la potencia de las siguientes señales y determinar si se tratan
de señales de Energía o señal de Potencia.
𝑥1 𝑡 = 𝐴
a)
∞
𝐸=න
− 𝑇ൗ2
2
…
𝑇ൗ
2
𝑡
2
∞
𝑥2 𝑡
2
𝐴
𝑇
𝑡
La señal es aperiódica, pero
podemos considerarla de
periodo 𝑇 → ∞
0
2
0
∞
∞
0
0
= 𝐴2 ∞
=∞
0
𝑇ൗ
0
2
1
1
1
𝑇
2
𝑑𝑡 = lim න 0𝑑𝑡 + lim න 𝐴2 𝑑𝑡 = lim 𝐴2
𝑇→∞
𝑇 0
𝑇→∞ 𝑇 −𝑇ൗ
𝑇→∞ 𝑇
2
2
Entonces, si: 𝑬 = ∞ ∩ 𝑷 =
= 𝑨𝟐
∴ Es una señal de Potencia
−∞
1 ൗ2
𝑃 = lim න
𝑥2 𝑡
𝑇→∞ 𝑇 −𝑇ൗ
=∞
1 2 𝑇ൗ2
1 2
1
𝑇 𝑇
𝐴 𝑡ቚ 𝑇 = lim 𝐴2
=
lim
𝐴 𝑇
+
𝑇→∞ 𝑇
− ൗ2
𝑇→∞ 𝑇
𝑇→∞ 𝑇
2 2
𝑑𝑡 = න 0𝑑𝑡 + න 𝐴2 𝑑𝑡 = 𝐴2 𝑡ቚ
−∞
= 𝐴2 ∞
= 𝐴2 ∞ − −∞
𝑑𝑡 = lim
Entonces, si: 𝑬 = ∞ ∩ 𝑷 = 𝑨𝟐
𝐸=න
Señales y Sistemas
−∞
2
b) 𝑥2 𝑡 = 𝐴𝑢(𝑡)
𝑇ൗ
2
∞
𝑇
1 ൗ2
𝑃 = lim න
𝑥1 𝑡
𝑇→∞ 𝑇 −𝑇ൗ
La señal es aperiódica, pero
podemos considerarla de
periodo 𝑇 → ∞
− 𝑇ൗ2
= 𝐴2 𝑡ቚ
𝑑𝑡
−∞
𝐴
…
𝑥1 𝑡
𝑨𝟐
𝟐
=
𝑨𝟐
𝟐
∴ Es una señal de Potencia
Ing. Diego Peñaloza
98
CAPITULO 1: CONCEPTOS BÁSICOS DE LA TEORIA DE SEÑALES EN TIEMPO CONTÍNUO
1.7. Energía y Potencia de la señal
Ejemplos: Encontrar analíticamente la energía y la potencia de las siguientes señales y determinar si se tratan
de señales de Energía o señales de Potencia.
c) 𝑥3 𝑡 = 𝐴𝑢(𝑡 − 𝑛)
𝑛
∞
𝐸=න
𝑥3 𝑡
2
0
∞
∞
𝑛
𝑛
𝑑𝑡 = න 0𝑑𝑡 + න 𝐴2 𝑑𝑡 = 𝐴2 𝑡ቚ
−∞
−∞
𝐴
𝑇ൗ
2
− 𝑇ൗ2
𝑛
𝑡
𝑇ൗ
2
La señal es aperiódica, pero
podemos considerarla de
periodo 𝑇 → ∞
d) 𝑥4 𝑡 = 𝐴 𝑟𝑒𝑐𝑡
Entonces, si: 𝑬 = ∞ ∩ 𝑷 =
∞
𝐸=න
𝑥4 𝑡
2
−∞
𝑑𝑡 = න
−𝑛ൗ
2
𝑇
−
𝑛
2
𝑛
2
𝑇ൗ
2
𝑡
La señal es aperiódica, pero
podemos considerarla de
periodo 𝑇 → ∞
Señales y Sistemas
𝑨𝟐
𝟐
𝑇
∴ Es una señal de Potencia
1 ൗ2
𝑃 = lim න
𝑥4 𝑡
𝑇→∞ 𝑇 −𝑇ൗ
2
2
0
0
0𝑑𝑡+ න
𝑛ൗ
2
−𝑛ൗ2
−∞
𝐴
− 𝑇ൗ2
0
𝑛
1
1
1 ൗ2 2
1
𝑇
2
𝑃 = lim න
𝑥3 𝑡 𝑑𝑡 = lim න 0𝑑𝑡 + lim න 𝐴 𝑑𝑡 = lim 𝐴2
−𝑛
𝑇→∞ 𝑇 −𝑇ൗ
𝑇→∞ 𝑇 −𝑇ൗ
𝑇→∞ 𝑇 𝑛
𝑇→∞ 𝑇
2
2
2
0
1 𝑛
𝑨𝟐
= lim 𝐴2
−
=
𝑇→∞
2 𝑇
𝟐
𝑡
𝑛
= 𝐴2 (∞ − 𝑛) = ∞
∞
𝐴2 𝑑𝑡 + න𝑛 0𝑑𝑡
ൗ2
−𝑛ൗ2
0
= 𝐴2
𝑛 𝑛
+
2 2
= 𝑨𝟐 𝒏
nൗ
2
𝑇ൗ
2
2
2
0
1
1
1
න
0𝑑𝑡 + lim න 𝐴2 𝑑𝑡 + lim න 0𝑑𝑡
𝑇→∞ 𝑇 −𝑇ൗ
𝑇→∞ 𝑇 −𝑛
𝑇→∞ 𝑇 𝑛
ൗ
ൗ
𝑑𝑡 = lim
2
1
𝑛 𝑛
1 2
= lim 𝐴2
+
= lim
𝐴 𝑛=𝟎
𝑇→∞ 𝑇
𝑇→∞ 𝑇
2 2
Entonces, si: 𝑬 = 𝑨𝟐 𝒏 ∩ 𝑷 = 𝟎
∴ Es una señal de Energía
Ing. Diego Peñaloza
99
CAPITULO 1: CONCEPTOS BÁSICOS DE LA TEORIA DE SEÑALES EN TIEMPO CONTÍNUO
1.7. Energía y Potencia de la señal
Problemas
1. Repetir los cuatro ejercicios anteriores multiplicando cada función por un 𝑆𝑒𝑛
2𝜋
𝑡
𝑛
2. Realizar los siguientes ejercicios de Ambardar, pág 30 y ss:
2.5
2.19
2.20
2.24
2.26
2.27
2.42 realizar las gráficas en matlab
Señales y Sistemas
Ing. Diego Peñaloza
100
CAPITULO 1: DESCRIPCIÓN MATEMÁTICA DE SEÑALES
1.8 Energía y Potencia de la Señal.
GRACIAS
Fin 7 ta Clase
Final del Capítulo 1
Señales y Sistemas
Ing. Diego Peñaloza
101