")
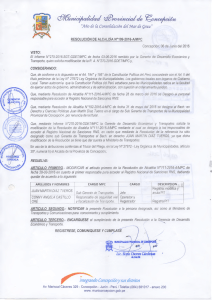
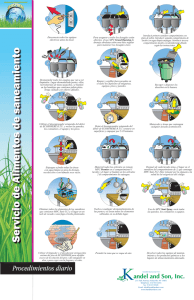
Control Predictivo Basado en Modelo (MPC) CONTROL PREDICTIVO BASADO EN MODELO (MPC) BSG Institute cuenta con la certificación ISO 9001:2015 Emitida por AENOR - España. bsginstitute.com 1 Control Predictivo Basado en Modelo (MPC) CONTENIDOS Introducción 3 Control Predictivo basado en Modelo: MPC 4 Ventajas del MPC 4 Desventajas del MPC 5 Elementos del Control Predictivo 5 Estrategia del MPC 6 Control Predictivo Generalizado 6 Conclusión 9 bsginstitute.com 2 Control Predictivo Basado en Modelo (MPC) INTRODUCCIÓN El control predictivo tiene internamente un mecanismo de optimización el cual trata de encontrar la acción de control más optima siempre respetando las restricciones establecidas por el ingeniero de control, dentro de una ventana de predicción. El controlador predictivo tal como su nombre lo indica trata de predecir el comportamiento dinámico de la planta con ayuda de un modelo interno, es por eso que la obtención de este modelo es muy importante para lograr conseguir buenas predicciones de nuestro proceso. Existen diferentes estrategias de controles predictivos basados en modelos (MPC, por sus siglas en ingles Model Predictive Control) En el siguiente whitepaper revisaremos aspectos a considerar para definir de forma adecuada de la Control Predictivo Basado en Modelo: MPC. bsginstitute.com 3 Control Predictivo Basado en Modelo (MPC) CONTROL PREDICTIVO BASADO EN MODELO: MPC Control predictivo basado en modelo se puede definir como una estrategia de control que se basa en la utilización de forma explícita de un modelo matemático interno del proceso a controlar (modelo de predicción),. El MPC se enmarca dentro de los controladores óptimos, es decir, aquellos en los que las actuaciones responden a la optimización de un criterio o función de coste, el cual está relacionado con el comportamiento futuro del sistema. VENTAJAS DEL MPC • Atractivo para personal sin un conocimiento profundo de control, puesto que los conceptos resultan muy intuitivos, a la vez que la sintonización es relativamente fácil. • Puede ser usado para controlar una gran variedad de procesos, desde aquellos con dinámica relativamente simple hasta otros mas complejos incluyendo sistemas con grandes retardos, de fase no mínima o inestables. • Permite tratar con facilidad el caso multivariable. • Tratamiento de restricciones, que pueden ser incluidas de forma sistemática durante el proceso de diseño. • Es muy útil cuando se conocen las futuras referencias • Permite la incorporación de distintos tipos de modelos de predicción, sean lineales o no lineales, monovariables o multivariables. • Otra de las razones que han contribuido a que el MPC se haya convertido en un éxito comercial es el hecho de que existen mas de 15 suministradores que instalan el producto llave en mano permitiendo que medianas empresas puedan tener acceso a esta tecnología. Estas empresas están creciendo en aplicaciones en procesos mineros. • Los nuevos Sistemas de Control Distribuido empiezan a ofertar productos MPC genéricos que ofrecen al usuario la posibilidad de realizar futuras modificaciones sin depender de un producto cerrado bsginstitute.com 4 Control Predictivo Basado en Modelo (MPC) DESVENTAJAS DEL MPC • Costo computacional alto. • Necesidad de disponer de un modelo apropiado del proceso. Proveedores/ sector industrial Aspen Honeywell Technology Hi-Spec Adersa Invensys SGS Total Refinarias 1.200 480 280 25 ---- 1.998 Petroquímica 450 80 ---- 20 ---- 550 Químicas 100 20 3 21 ---- 166 Polpa e Papel 18 50 ---- ---- ---- 69 Outras 40 40 1.045 26 450 1.658 4.635 TOTAL ELEMENTOS DEL CONTROL PREDICTIVO Hay una serie de elementos comunes a todos los controladores predictivos: • El uso de un modelo matemático del proceso que se utiliza para predecir la evolución futura de las variables controladas sobre un horizonte de predicción. • La imposición de una estructura en las variables manipuladas futuras. • El establecimiento de una trayectoria deseada futura, o referencia, para las variables controladas • El cálculo de las variables manipuladas optimizando una cierta función de costo • La aplicación del control siguiendo una política de horizonte móvil. bsginstitute.com 5 Control Predictivo Basado en Modelo (MPC) ESTRATEGIA DEL MPC • Las salidas futuras para un horizonte determinado N, llamado horizonte de predicción, se predicen cada instante t utilizando el modelo del proceso. • La secuencia de señales de control futuras se calcula minimizando un criterio para mantener al proceso lo más cerca posible de la trayectoria de referencia w(t + k). • La señal de control u(t|t) se envía al proceso mientras que el resto de las señales calculadas no se consideran. Funcao objetivo Restricoes w(t+j) + e(t+j/t) Erros - futuros Trajectoria de referencia u(t) Otimizador Planta Entradas passadas Δu(t+j/t) Sequencia de acoes de controle futuras y(t) Saidas passadas Modelo de predicao Saidas futuras preditas CONTROL PREDICTIVO GENERALIZADO El GPC se ha convertido en uno de los métodos más populares tanto en el mundo industrial como en el académico y ha funcionado con éxito en muchas aplicaciones industriales, pudiendo tratar plantas inestables y de fase no mínima. Utiliza modelo Carima (Controller Auto-Regressive Integrated Moving- Average): A(z )y(t) = B(z )z u(t-1) + C(z ) -1 -1 -d -1 e(t) Δ bsginstitute.com 6 Control Predictivo Basado en Modelo (MPC) Δ = 1-z -1 , u(t) e y(t) son las variables de entrada y salida respectivamente e(t) es un ruido blanco A, B y C son polinomios en el operador retardo z -1 y d es el tiempo muerto del sistema. Función Objetivo N2 J=Σ ϭ(j)[y(t+j|t) - w(t+j)]2 + j=N1 Nu Σ λ(j) [Δ u(t+j) -1) ]2 j=1 N1, N2 : horizontes de predicción mínimo e máximo Nu : horizonte de control ϭ: penalización de error λ: penalización del control w(t+j) es la futura trayectoria de referencia LEY DE CONTROL DEL GPC w + K u Proceso y f Calculo Resp. libre bsginstitute.com 7 Control Predictivo Basado en Modelo (MPC) La secuencia de salida t [^y(t+1); ^y(t+2); : : : ; ^y(t+N)]T es igual a la primera columna de la matriz G. La respuesta libre se puede calcular de forma recursiva como. fj+1= z(1 - Ã(z-1)) fj + B(z-1) Δ u(t-d+j) f0= y(t) y Δu(t + j) = o para j ≥ 0 Por otra parte, la función de coste se puede escribir como: J= (Gu + f - w)T (Gu + f - w) + λuT u Donde W= [w(t + d + 1). . . w(t + d + N)] T El mínimo de J, considerando que no hay restricciones se puede encontrar igualando a cero el gradiente de J, lo que conduce a: u= (GT G + λI)-1 GT (w - f) En realidad, al usar una estrategia de horizonte deslizante, la señal de control que verdaderamente se envía al proceso es el primer elemento del vector u, dado por: Δ u(t) = K(w - f) Donde K es la primera fila de la matriz (GTG +λI) -1 GT bsginstitute.com 8 Control Predictivo Basado en Modelo (MPC) CONCLUSIÓN: Actualmente existen variadas metodologías de control para la consecución del objetivo planteado, diferenciándose principalmente en los compromisos alcanzados al realizar las formulaciones matemáticas de los criterios de funcionamiento, en forma de funciones objetivo dinámicas acompañadas de restricciones, y en la forma de abstraer el proceso, representado como un modelo dinámico al que se le añaden incertidumbres. Es entonces cuando aparecen los métodos de Control Predictivo basado en Modelo (MPC en sus siglas en inglés), que en su estructura más general acepta cualquier tipo de modelos, funciones objetivo y/o restricciones. bsginstitute.com 9 Control Predictivo Basado en Modelo (MPC) ACERCA DE BSG INSTITUTE Somos una organización innovadora con una experiencia exitosa en prestar servicios de capacitación, para lo cual contamos con una amplia red internacional de expertos y de relaciones con instituciones de primer nivel en las siguientes áreas: Calidad, Seguridad y Salud en el Trabajo, Seguridad Alimentaria, Gestión Ambiental, Finanzas, Construcción, Mantenimiento, Minería, Proyectos, Tecnologías de Información, Seguridad de la Información, Big Data, Transformación Digital, Inteligencia Artificial, Marketing Digital, Continuidad del negocio. +24000 +2800 +2200 +180 Número de profesionales capacitados provenientes de toda América Latina. Número de empresas de Argentina, Bolivia, Chile, Colombia, Costa Rica, Ecuador, Guatemala, México, Nicaragua, Perú y República Dominicana que nos confiaron la capacitación de sus colaboradores. Número de empresas líderes en Latinoamérica, donde laboran nuestros egresados. Número de integrantes de nuestra plana docente de vasta experiencia provenientes de países como: Argentina, Bolivia, Canadá, Chile, Colombia, España, Francia, México y Perú. bsginstitute.com 10 Control Predictivo Basado en Modelo (MPC) Capacitando a profesionales de toda Latinoamérica. PERÚ : Lima - Av. José Pardo 650 Miraflores - Teléfono +51 (01) 207 2770 : Arequipa - Urb. León XIII Calle 2 N° 107 Cayma - Teléfono +51 (54) 258787 COLOMBIA : Bogotá - Av. Carrera 45 N° 108-27 - Torre 1 Oficina 1008 - Teléfono +57 (1) 3819462 BOLIVIA : Santa Cruz de la Sierra - Av. Marcelo Terceros Bánzer 304 - Teléfono +59 (1) 3 3403140 www.bsginstitute.com E-mail: [email protected] BSG Institute bsginstitute.com 11