EJERCICIOS RESUELTOS MODULO 1. TRANSFORMADA Z
1. Determine la restricción que debe haber en 𝒓 = |𝒛| para que cada una de las siguientes sumas converja.
𝟏 𝒏+𝟏
𝟏 −𝒏+𝟏
a)∑∞
𝒏=−𝟏 (𝟐)
𝒛−𝒏
b) ∑∞
𝒏=𝟏 (𝟐)
𝒛𝒏
c) ∑∞
𝒏=𝟎 {
} 𝒛−𝒏
d) ∑∞
𝒏=−∞ (𝟐)
𝒄𝒐𝒔(𝝅𝟒𝒏)𝒛−𝒏
𝟏+(−𝟏)𝒏
𝟐
𝟏 |𝒏|
Sol:
|𝒛| >
𝟏
𝟐
|𝒛| <
𝟏
𝟐
|𝒛| > 1
𝟏
𝟐
< |𝒛| > 2
Resolución:
Se refiere a la restricción del módulo de la variable z, en definitiva nos está limitando su región de
convergencia. El procedimiento consiste en sustituir z por 𝑟𝑒 𝑗𝜔 . Y determinar para que valores de r la suma
converge.
Apartado a)
∞
∞
∞
∞
𝒏=−𝟏
𝒏=−𝟏
𝒏=−𝟏
𝒏=−𝟏
𝒏
𝟏 𝒏+𝟏 −𝒏
𝟏 𝒏+𝟏
𝟏 𝒏+𝟏 −𝒏 −𝑗𝜔𝑛 1
𝟏
−𝒏
∑ ( )
𝒛 = ∑ ( )
𝒓 𝑒
= ∑ ( 𝒓−𝟏 ) 𝑒 −𝑗𝜔𝑛
(𝑟𝑒 𝑗𝜔 ) = ∑ ( )
𝟐
𝟐
𝟐
2
𝟐
Si observamos para que dicha serie geométrica converja en el infinito, debe ocurrir que:
𝟏 −𝟏
𝟏
𝟏
𝒓 < 1 ⇒ 𝒓−𝟏 < 2 ⇒ 𝒓 > ⇒ |𝒛| >
𝟐
𝟐
𝟐
Fijaros que la igualdad no la incluido pues sería la suma de infinitos 1’s, suma que diverge.
Apartado b)
∞
∞
∞
∞
𝒏=𝟏
𝒏=𝟏
𝒏=𝟏
𝒏=𝟏
𝟏 −𝒏+𝟏 𝒏
𝟏 −𝒏+𝟏
𝟏 −𝒏+𝟏 𝒏 𝑗𝜔𝑛 1
𝒏
∑( )
𝒛 = ∑( )
𝒓 𝑒
= ∑(𝟐𝒓)𝒏 𝑒 𝑗𝜔𝑛
(𝑟𝑒 𝑗𝜔 ) = ∑ ( )
𝟐
𝟐
𝟐
2
Si observamos para que dicha serie geométrica converja en el infinito, debe ocurrir que:
𝟐𝒓 < 1 ⇒ 𝒓 <
𝟏
𝟏
⇒ |𝒛| <
𝟐
𝟐
Apartado c)
∞
∞
∞
∞
𝒏=𝟎
𝒏=𝟎
𝒏=𝟎
𝒏=𝟎
𝟏 + (−𝟏)𝒏
𝒓−𝒏 + (−𝒓)−𝒏 −𝑗𝜔𝑛 1
1
𝑗𝜔 −𝒏
∑{
= ∑ 𝒓−𝒏 𝑒 −𝑗𝜔𝑛 + ∑(−𝒓)−𝒏 𝑒 −𝑗𝜔𝑛
} (𝑟𝑒 ) = ∑ {
}𝑒
𝟐
𝟐
2
2
1
Donde se observa claramente que amabas series convergen si 𝑟 > 1 ⇒ |𝒛| > 1
Apartado d)
𝟎
∞
∞
𝟏 |𝒏|
𝟏 −𝒏
𝟏 𝒏
−𝒏
−𝒏
𝝅
𝝅
𝝅
∑ ( ) 𝒄𝒐𝒔 ( 𝟒 𝒏) 𝒛−𝒏 = ∑ ( ) 𝒄𝒐𝒔 ( 𝟒 𝒏) (𝑟𝑒 𝑗𝜔 ) + ∑ ( ) 𝒄𝒐𝒔 ( 𝟒 𝒏) (𝑟𝑒 𝑗𝜔 )
𝟐
𝟐
𝟐
𝒏=−∞
𝒏=−∞
𝟎
∞
𝒏=𝟏
𝒏
𝟏 −𝒏
𝟏
𝝅
𝝅
= ∑ ( 𝒓) 𝒄𝒐𝒔 ( 𝟒 𝒏) 𝑒 −𝑗𝜔𝑛 + ∑ ( 𝒓−𝟏 ) 𝒄𝒐𝒔 ( 𝟒 𝒏) 𝑒 −𝑗𝜔𝑛
𝟐
𝟐
𝒏=−∞
𝒏=𝟏
La convergencia se producirá en la intersección de cada serie.
La primera converge cuando
La segunda converge cuando
𝟏
𝒓<1⇒𝒓<2
𝟐
𝟏 −𝟏
𝟏
𝒓 <1⇒𝒓>
𝟐
𝟐
Con lo que, la suma de ambas converge para los valores de r tales que: 𝟏𝟐 < 𝑟 > 2, o lo que es lo mismo 𝟏𝟐 <
|𝒛| > 2
2. Examine la señal
𝟏 𝒏
𝒙[𝒏] = ( ) 𝒖[𝒏 − 𝟑]
𝟓
Use la ecuación (10.3) para evaluar la transformada z de esta señal, y especifique la región de convergencia
correspondiente.
Sol:
1
𝑋(𝑧) = 125
𝑧 −3
1−15𝑧 −1
1
, y su ROC |𝑧| > 5
Resolución:
Usando la ecuación (10.3)
1 −3
∞
∞
1 𝑛
1 𝑛 −𝑛
1 −1 𝑛 125 𝑧 − 0
1 −3
1
−𝑛
𝑋(𝑧) = ∑ ( ) 𝑢[𝑛 − 3] 𝑧 = ∑ ( ) 𝑧 = ∑ ( 𝑧 ) =
=
𝑧
1
1
5
5
5
125
1 − 𝑧 −1
1 − 𝑧 −1
𝑛=−∞
𝑛=3
𝑛=3
5
5
1
Pero esta serie converge, y por tanto es válida la suma realizada si y sólo sí, 5 𝑧 −1 < 1
∞
1
5
Por lo tanto cuando |𝑧| > . Hemos colocado el módulo ya que el signo no influye en la convergencia,
recuerda que las ROC’s son círculos en el plano complejo.
3. Sea
𝒙[𝒏] = (−𝟏)𝒏 𝒖[𝒏] + 𝜶𝒏 𝒖[−𝒏 − 𝒏𝟎 ]
Determine las restricciones en el número complejo 𝜶 y el entero 𝒏𝟎 , dado que la ROC de 𝑿(𝒛) es 𝟏 < |𝒛| <
2.
2
Sol:
|𝜶| < 2, 𝒏𝟎 arbitrario
Resolución:
𝒙[𝒏] = (−𝟏)𝒏 𝒖[𝒏] + 𝜶𝒏 𝒖[−𝒏 − 𝒏𝟎 ]
Si obtenemos la TZ de cada término tenemos
∞
∞
𝑋(𝑧) = ∑
(−1)𝑛
𝑢[𝑛]𝑧
−𝑛
= ∑(−𝑧 −1 )𝑛 =
𝑛=−∞
𝑛=0
1−0
1
=
−1
(−𝑧
)
1−
1 + 𝑧 −1
Con ROC |𝑧| > 1
Por otro lado tenemos
−𝑛0
∞
𝑛
𝑋(𝑧) = ∑ 𝛼 𝑢[−𝑛 − 𝑛0
]𝑧 −𝑛
= ∑ (𝛼𝑧 −1 )𝑛 =
𝑛=−∞
Con ROC 𝛼𝑧 −1 > 1 ⇒ 𝑧 −1 >
𝑛=−∞
1
𝛼
0 − (𝛼𝑧 −1 )−𝑛0 (𝛼𝑧 −1 ) −𝛼 −𝑛0 +1 𝑧 𝑛0 −1
=
1 − 𝛼𝑧 −1
1 − 𝛼𝑧 −1
⇒𝑧 <𝛼
Por tanto la de ambos término nos da la ROC de la secuencia 𝑥[𝑛], la cual vendrá dada por
1 < |𝑧| < 𝛼
|𝛼|
Con lo que para que se cumpla el enunciado
< 2, y donde el valor del término 𝑛0 no influye en la ROC.
4. Considere la señal
𝟏 𝒏
𝝅
(
𝒙[𝒏] = { 𝟑) 𝒄𝒐𝒔 ( 𝟒 𝒏) ,
𝟎,
Determine los polos y la ROC para 𝑿(𝒛).
𝒏≤𝟎
𝒏>𝟎
Sol:
𝟏
𝟑
𝝅
Polos en 𝒛 = 𝒆±𝒋𝟒 , ROC: |𝒛| >
𝟏
𝟑
Resolución:
Apliquemos la ecuación para evaluar la TZ.
0
1 𝑛
𝜋
𝑋(𝑧) = ∑ ( ) 𝑐𝑜𝑠 ( 𝑛) 𝑧 −𝑛
3
4
𝑛=−∞
𝝅
Si aplicamos Euler
𝜋
𝑐𝑜𝑠 ( 4 𝑛)
=
𝝅
𝒋 𝒏
−𝒋 𝒏
𝒆 𝟒 +𝒆 𝟒
,
2
con lo que
3
0
𝑛
𝝅
0
𝑛
𝝅
1
𝒆𝒋 𝟒
1
𝒆−𝒋𝟒 −1
𝑋(𝑧) = ∑ ( 𝑧 −1 ) + ∑ (
𝑧 )
2
3
2
3
𝑛=−∞
𝑛=−∞
Donde la ROC en ambos términos (recuerda es el módulo).
𝟏 −1
1
|𝑧| > 1 ⇒ |𝑧| <
3
3
Para averiguar los polos resolvemos la suma en la ROC
0
𝑛
𝝅
0
𝑛
𝝅
1
𝒆𝒋 𝟒
1
𝒆−𝒋𝟒 −1
1
𝑋(𝑧) = ∑ ( 𝑧 −1 ) + ∑ (
𝑧 ) =
2
3
2
3
2
𝑛=−∞
𝑛=−∞
𝝅
=
𝒆𝒋 𝟒
−1 ( 3 𝑧 −1 )
1
𝒋𝝅
𝟒
2
𝝅
+
𝒆−𝒋𝟒
−1 ( 3 𝑧 −1 )
1
−𝒋𝝅
𝟒
2
𝒆
𝒆
1 − 3 𝑧 −1
1 − 3 𝑧 −1
Los polos son los valores que anulan al denominador
−1
𝒋𝝅
𝟒
𝒆
1 − 3 𝑧 −1
=
+
1
2
−1
𝝅
𝒆−𝒋𝟒
1 − 3 𝑧 −1
1
1
1
1
𝝅 +
𝝅
2 1 − 3𝒆−𝒋𝟒 𝑧 2 1 − 3𝒆𝒋𝟒 𝑧
𝟏 𝒋𝝅
𝒆𝟒
3
𝝅
𝟏
𝝅
1 − 3𝒆+𝒋𝟒 𝑧 = 0 ⇒ 𝑧 = 𝒆−𝒋𝟒
3
𝝅
1 − 3𝒆−𝒋𝟒 𝑧 = 0 ⇒ 𝑧 =
5. Determine la transformada z de cada una de las siguientes secuencias. Trace el diagrama de polos y ceros
e indique la región de convergencia. Indique si existe o no la transformada de Fourier de la secuencia.
a) 𝜹[𝒏 + 𝟓]
c) (−𝟏)𝒏 𝒖[𝒏]
b) 𝜹[𝒏 − 𝟓]
𝟏 𝒏
e) (− 𝟑) 𝒖[−𝒏 − 𝟐]
𝟏 𝒏
g) 𝟐𝒏 𝒖[−𝒏] + (𝟒) 𝒖[𝒏 −
𝟏 𝒏
f) (𝟒) 𝒖[𝟑 − 𝒏]
𝟏 𝒏−𝟐
h) (𝟑)
𝒖[𝒏 − 𝟐]
𝟏 𝒏+𝟏
d) (𝟐)
𝟏]
𝒖[𝒏 + 𝟑]
Resolución:
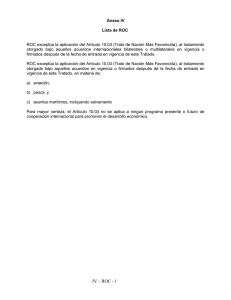
Apartado a)
∞
𝑋(𝑧) = ∑ 𝑥[𝑛] 𝑧
𝑛=−∞
∞
−𝑛
= ∑ 𝛿[𝑛 + 5] 𝑧
𝑛=−∞
∞
−𝑛
∞
5
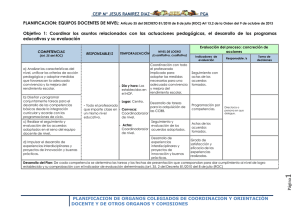
= ∑ 𝛿[𝑛 + 5] 𝑧 = 𝑧
𝑛=−∞
5
∑ 𝛿[𝑛 + 5] == 𝑧 5
𝑛=−∞
Su ROC es todo el plano Z, menos el infinito. Por tanto al incluir al círculo unidad existe su transformada de
Fourier.
4
90
1
120
60
0.5
150
30
Zero de orden 5
180
0
210
en z=0
330
240
300
270
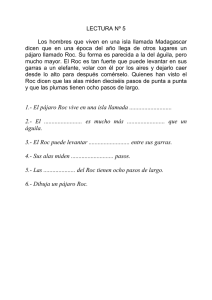
Apartado b)
∞
∞
𝑋(𝑧) = ∑ 𝑥[𝑛] 𝑧
−𝑛
𝑛=−∞
∞
= ∑ 𝛿[𝑛 − 5] 𝑧
−𝑛
𝑛=−∞
∞
= ∑ 𝛿[𝑛 − 5] 𝑧
−5
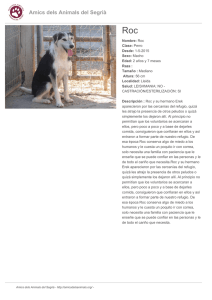
=𝑧
𝑛=−∞
90
−5
∑ 𝛿[𝑛 − 5] == 𝑧 −5
𝑛=−∞
1
120
60
0.5
150
30
polo de orden 5
180
en z=0
0
210
330
240
300
270
Su ROC es todo el plano Z, menos el cero. Vemos por tanto que también incluye al círculo unidad por lo
tanto existe su transformada de Fourier.
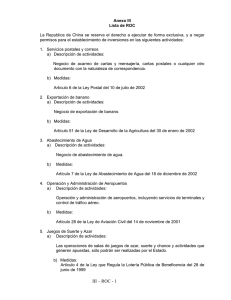
Apartado c)
∞
𝑋(𝑧) = ∑ 𝑥[𝑛] 𝑧
𝑛=−∞
∞
−𝑛
= ∑
∞
(−1)𝑛
𝑛=−∞
𝑢[𝑛] 𝑧
−𝑛
∞
𝑛
= ∑(−1) 𝑧
𝑛=0
−𝑛
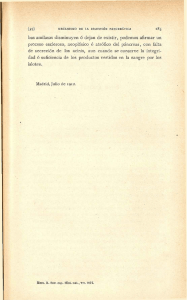
= ∑(−𝑧 −1 )𝑛 =
𝑛=0
1−0
1
=
−1
1+𝑧
1 + 𝑧 −1
La suma converge cuando |𝑧 −1 | < 1, por lo tanto su ROC es |𝑧| > 1. Esta región de convergencia no incluye
al círculo unidad, en consecuencia, no existe transformada de Fourier de la secuencia.
5
90
1
120
60
0.5
150
30
180
0
210
330
240
300
270
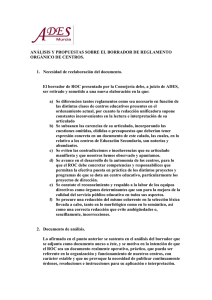
Apartado d)
∞
𝑋(𝑧) = ∑ 𝑥[𝑛] 𝑧
𝑛=−∞
−𝑛
∞
∞
∞
𝑛=−∞
𝑛=−3
𝑛=−3
𝑛
1 𝑛+1
1 𝑛+1 −𝑛 1
𝑧 −1
= ∑ ( )
𝑢[𝑛 + 3] 𝑧 −𝑛 = ∑ ( )
𝑧 = ∑ (
)
2
2
2
2
−3
𝑧 −1
(
1 2 ) −0
4𝑧 3
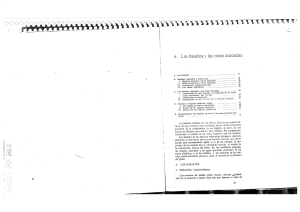
=
=
1
𝑧 −1
2
1 − 2 𝑧 −1
1−
2
La suma converge para
|𝑧 −1 |
2
1
< 1, lo que implica que su ROC es |𝑧| > 2. Por tanto la transformada de Fourier
existe porque la ROC incluye el círculo unidad.
90
120
1
0.8
Zero de orden 4
60
0.6
150
30
0.4
0.2
Polo en z=0.5
180
0
210
330
240
300
270
Apartado e)
∞
𝑋(𝑧) = ∑ 𝑥[𝑛] 𝑧
𝑛=−∞
−𝑛
∞
−2
∞
𝑛=−∞
𝑛=−∞
𝑛=2
1 𝑛
1 𝑛
9𝑧 2
= ∑ (− ) 𝑢[−𝑛 − 2] 𝑧 −𝑛 = ∑ (− ) 𝑧 −𝑛 = ∑(−3𝑧)𝑛 =
3
3
1 + 3𝑧
9𝑧 2
3𝑧
=
=
1
1
3𝑧 (1 + 3 𝑧 −1 ) 1 + 3 𝑧 −1
1
La suma converge para 3|𝑧| < 1, lo que determina que su ROC es |𝑧| < 3. Por lo tanto no existe la
transformada de Fourier al no incluir al círculo unidad.
6
Polo en z=-1/3
90
1
120
60
0.5
150
30
Zero de orden 2
180
0
210
330
240
300
270
Apartado f)
∞
1 −3
3
∞
1 𝑛
1 𝑛 −𝑛
4−3 𝑧 −3 64 𝑧
−𝑛
𝑛
= ∑ ( ) 𝑢[3 − 𝑛] 𝑧 = ∑ ( ) 𝑧 = ∑ (4𝑧) = =
=
4
4
1 − 4𝑧 1 − 4𝑧
∞
𝑋(𝑧) = ∑ 𝑥[𝑛] 𝑧
−𝑛
𝑛=−∞
𝑛=−∞
𝑛=−∞
𝑛=−3
1
La suma converge para 4|𝑧| < 1, lo que determina que su ROC es |𝑧| < 4. Por lo tanto no existe la
transformada de Fourier al no incluir al círculo unidad.
90
1
120
60
0.5
150
30
180
Polo en z=1/4
0
210
330
240
300
270
Polo tercer orden en z=0
Apartado g)
Consideramos dos secuencias, tales que:
𝑥1 [𝑛] = 2𝑛 𝑢[−𝑛]
1 𝑛
𝑥2 [𝑛] = ( ) 𝑢[𝑛 − 1]
4
La primera tendrá una TZ, tal que,
∞
0
∞
𝑋1 (𝑧) = ∑ 𝑥1 [𝑛] 𝑧
−𝑛
𝑛=−∞
𝑛
= ∑ 2 𝑢[−𝑛] 𝑧
𝑛=−∞
−𝑛
∞
𝑛
= ∑ 2 𝑧
𝑛=−∞
−𝑛
𝑧 𝑛
1
2
= ∑( ) =
=
𝑧
2
1−2 2−𝑧
𝑛=0
𝑧
La suma converge para | | < 1. Por lo que su ROC es |𝑧| < 2.
2
Por otro lado para la secuencia 2.
7
∞
𝑋2 (𝑧) = ∑ 𝑥2 [𝑛] 𝑧 −𝑛
𝑛=−∞
=
𝑧 −1
∞
∞
𝑛
−1 𝑛
−0
1 𝑛
1
𝑧
= ∑ ( ) 𝑢[𝑛 − 1] 𝑧 −𝑛 = ∑ ( ) 𝑧 −𝑛 = ∑ (
) = 4 −1
𝑧
4
4
4
1− 4
𝑛=−∞
𝑛=1
𝑛=1
∞
1 𝑧 −1
4 1 − 1 𝑧 −1
4
Donde la suma converge para |
𝑧 −1
|
4
1
< 1. Por tanto su ROC es |𝑧| > 4.
La TZ de la secuencia del apartado g), es la suma de cada uno de los sumandos, por tanto
7
− 𝑧 −1
2
1 𝑧 −1
4
𝑋(𝑧) =
+
=
1
9
2 − 𝑧 4 1 − 𝑧 −1 1 − 𝑧 −1 + 1 𝑧 −2
4
4
2
Con ROC la intersección por tanto
1
4
< |𝑧| < 2. ROC que coge al círculo unidad, por lo tanto existe
transformada de Fourier.
90
2
120
60
1.5
1
150
Zero simple en
30
Polo en z=1/4
0.5
z=0
180
0
210
330
Polo en z=2
240
300
270
Apartado h)
∞
∞
1
𝑋(𝑧) = ∑ 𝑥[𝑛] 𝑧 −𝑛 = ∑ ( )
3
𝑛=−∞
𝑛−2
𝑛=−∞
=
𝑧
∞
𝑛−2
1
𝑢[𝑛 − 2] 𝑧 −𝑛 = ∑ ( )
3
𝑛=2
𝑧 −2
−0
𝑧
∑(
) = 9 9 −1
𝑧
3
1− 3
𝑛=2
−2 ∞
1
𝑧 −𝑛 == ( )
3
−2
−1 𝑛
1
1 − 3 𝑧 −1
Donde la suma converge para |
𝑧 −1
|
3
1
< 1. Por tanto su ROC es |𝑧| > 3. Con lo que está incluido el círculo
unidad y si existe pues su transformada de Fourier discreta.
90
1
120
60
0.5
150
Polo en z=0
30
180
0
210
330
Polo en z=1/3
240
300
270
8
6. Determine la transformada z de las siguientes secuencias. Exprese todas las sumas en forma cerrada.
Indique la región de convergencia. Indique si existe la transformada de Fourier de la secuencia.
𝟏 𝒏
𝟏 |𝒏|
a) (𝟐) {𝒖[𝒏 + 𝟒] − 𝒖[𝒏 − 𝟓]}
b) 𝒏 (𝟐)
𝟏 |𝒏|
d) 𝟒𝒏 𝒄𝒐𝒔 [
c) |𝒏| (𝟐)
𝟐𝝅𝒏
𝝅
+ 𝟒 ] 𝒖[−𝒏 −
𝟔
𝟏]
Resolución:
Apartado a)
Se trata de una secuencia de duración finita entre la muestra -4 y la muestra 4.
−4
5
𝑧 −1
1 9 −9
−4
−
(
)
1
−
(
1
𝑧
1
2
2) 𝑧
4
𝑋(𝑧) = ∑ 𝑥[𝑛] 𝑧 −𝑛 = ∑ ( ) 𝑧 −𝑛 = ∑ (
==
(
)
𝑧
) =
1
𝑧 −1
2
2
2
1 − 𝑧 −1
1− 2
𝑛=−∞
𝑛=−4
𝑛=−4
2
Al ser una secuencia finita la ROC es todo el plano z, no incluye al infinito ni al cero, al tener potencias
positivas y negativas.
Diagrama (no lo voy a representar, pero sí indicar los polos y ceros)
Además tiene un cero de orden 4 en z=0 (debido al término 𝑧 4 ), por otro lado parece que tiene un polo en
1
𝑧 = (fíjate anula el denominador), pero también anula al numerador (por tanto no es polo). Lo cual debe
∞
4
4
𝑛
−1 𝑛
𝑧 −1
( 2 )
2
ser así, pues la ROC de una secuencia limitada es todo el plano z. Hemos pues observado que hay cero en
1
1
1
𝑧 = 2 de orden 9, pero como hay un polo en 𝑧 = 2, acabamos diciendo que hay un cero en 𝑧 = 2 de orden 8.
Como la ROC es todo el plano z, incluye al círculo unidad y por tanto existe transformada de Fourier.
Apartado b)
∞
∞
𝑋(𝑧) = ∑ 𝑥[𝑛] 𝑧
𝑛=−∞
−𝑛
∞
0
∞
𝑛=−∞
𝑛
𝑛=1
1 |𝑛|
1 −𝑛
1 𝑛
= ∑ 𝑛 ( ) 𝑧 −𝑛 = ∑ 𝑛 ( ) 𝑧 −𝑛 + ∑ 𝑛 ( ) 𝑧 −𝑛 =
2
2
2
𝑛=−∞
𝑧 𝑛
∞
𝑧 −1
= ∑ −𝑛 ( ) + ∑ 𝑛 (
) 𝑧 −𝑛
2
2
𝑛=0
𝑛=1
𝑎
𝑛
Si recordamos la suma de la serie ∑∞
𝑛=0 𝑛𝑎 = (1−𝑎)2 ; |𝑎| < 1
Por lo tanto y teniendo en cuenta que la suma es idéntica tanto si empieza en 0, como en -1.
Nos queda
𝑧 −1
2
+
2
𝑧 2
𝑧 −1
(1 − 2)
𝑛=0
𝑛=1
(1 − 2 )
1
La primera serie converge para |𝑧|<2 y la segunda |𝑧| > 2. Por tanto su ROC vendrá dada por
∞
∞
𝑛
𝑧 𝑛
𝑧 −1
𝑋(𝑧) = − ∑ 𝑛 ( ) + ∑ 𝑛 (
) 𝑧 −𝑛 = −
2
2
𝑧
2
9
1
< |𝑧| < 2
2
En definitiva su transformada de Fourier existe.
1
Tiene un polo en 𝑧 = 2 y en 𝑧 = 2.
Apartado c)
∞
0
∞
𝑋(𝑧) = ∑ 𝑥[𝑛] 𝑧
−𝑛
𝑛=−∞
∞
1 |𝑛|
1 −𝑛
1 𝑛
= ∑ |𝑛| ( ) 𝑧 −𝑛 = ∑ −𝑛 ( ) 𝑧 −𝑛 + ∑ 𝑛 ( ) 𝑧 −𝑛 =
2
2
2
𝑛=−∞
𝑛=−∞
∞
∞
𝑛=0
𝑛=1
−1 𝑛
𝑧 𝑛
𝑧
= ∑𝑛( ) + ∑𝑛(
) 𝑧 −𝑛
2
2
𝑛=1
𝑧 −1
2
=
+
2
𝑧 2
𝑧 −1
(1 − 2)
(1 − 2 )
𝑧
2
1
2
Aplicando los mismos criterios apartado anterior, la ROC es la misma
transformada de Fourier, siendo los polos 𝑧 = 2 y en 𝑧 =
1
2
< |𝑧| < 2 y por tanto hay
Apartado d)
Aplicamos Euler al coseno y tenemos
∞
−1
𝑋(𝑧) = ∑ 𝑥[𝑛] 𝑧 −𝑛 = 𝑒
𝑛=−∞
𝑗𝜋
4
−1
∑ 4𝑛 𝑒
𝑗𝜋
𝑛 −𝑛
3
𝑧
+𝑒
𝑛=−∞
−1
−1
𝑛
𝜋
𝜋
−𝑗𝜋
4
𝜋
∑ 4𝑛 𝑒 −𝑗 3 𝑛 𝑧 −𝑛 =
𝑛=−∞
𝑛
𝜋
𝜋
= 𝑒 𝑗 4 ∑ (4𝑒 𝑗 3 𝑧 −1 ) + 𝑒 −𝑗 4 ∑ (4𝑒 −𝑗 3 𝑧 −1 ) =
𝑛=−∞
∞
−𝑛
𝜋
𝜋
= 𝑒 𝑗 4 ∑ (4𝑒 𝑗 3 𝑧 −1 )
𝑛=1
=𝑒
(4𝑒 𝑗 3 𝑧 −1 )
𝜋
−1
1 − (4𝑒 𝑗 3 𝑧 −1 )
−𝑛
𝜋
𝜋
+ 𝑒 −𝑗 4 ∑ (4𝑒 −𝑗 3 𝑧 −1 )
𝑛=1
−1
𝜋
𝑗𝜋
4
𝑛=−∞
∞
−1
𝜋
+𝑒
−𝑗𝜋
4
=
(4𝑒 −𝑗 3 𝑧 −1 )
𝜋
−1
1 − (4𝑒 −𝑗 3 𝑧 −1 )
𝜋
Donde la primera suma converge para |4𝑒 𝑗 3 𝑧 −1 | > 1, por tanto |𝑧| < 4, si hacemos lo mismo en la segunda
suma nuevamente converge para |𝑧| < 4.
En consecuencia la ROC es |𝑧| < 4 y en consecuencia si existe transformada de Fourier.
10
7. Sea 𝐱[𝐧] una señal absolutamente sumable con transformada z racional 𝐗(𝐳). Si sabemos que 𝑿(𝒛) tiene
un polo en 𝒛 = 𝟏𝟐. ¿Podría 𝒙[𝒏] ser
una señal de duración finita?
una señal izquierda?
una señal derecha?
una señal bilateral?
Sol:
No, b) No, c) Sí, d) No
Resolución:
No, debido a que toda secuencia de duración finita, la ROC es todo el plano z, excepto en posiblemente 𝑧 =
0 𝑦 𝑧 = ∞, los cuales son los dos únicos posibles valores de los polos
No. Si tenemos una secuencia definida a la izquierda significa que para obtener la TZ hemos de realizar el
sumatorio
𝑁2
𝑋(𝑧) = ∑ 𝑥[𝑛] 𝑧 −𝑛
𝑛=−∞
Donde 𝑁2 puede ser positivo o negativo, para el primer caso 𝑧 = 0 será un polo y la ROC no lo incluye, y en
el segundo la ROC incluye a 𝑧 = 0. En definitiva su ROC es por lo general 0 < |𝑧| < 𝑟0 .
Como en el enunciado se nos indica que es absolutamente sumable, implica que el círculo unidad forma
1
parte de la ROC. Por tanto 𝑧 = 2, no puede ser un polo, ya que ese punto está dentro de la ROC.
Sí, es el caso contrario al del apartado b). En este caso la ROC es de |𝑧| > 𝑟0 , como es absolutamente
1
sumable la ROC debe incluir al círculo unidad y por ejemplo una ROC definida como |𝑧| > 2, correspondería
1
a una ROC de una secuencia definida a derecha con un polo en 𝑧 = 2.
Sí, también podría ser una señal bilateral, ya que su ROC será un anillo que además por ser absolutamente
1
sumable incluirá al círculo unidad. Por tanto podemos definir una secuencia cuya ROC sea < |𝑧| < 𝑟0 . Y con
2
𝑟0 > 1, para que incluya al círculo unidad. De esta forma hemos definido una secuencia bilateral con un polo
1
en 𝑧 = 2.
8. Suponga que la expresión algebraica para la transformada z es
𝑿(𝒛) =
𝟏 − 𝟏𝟒𝒛−𝟐
(𝟏 + 𝟏𝟒𝒛−𝟐 )(𝟏 + 𝟓𝟒𝒛−𝟏 + 𝟑𝟖𝒛−𝟐 )
¿Cuántas regiones de convergencia diferentes corresponderían a 𝑿(𝒛)?
Sol:
3 regiones de convergencia
Resolución:
11
Para contestar adecuadamente a la pregunta, lo primero que debemos evaluar son los polos de la
Transformada z.
Polos de TZ.
1
𝑧1 =
2𝑗
1
1 + 4𝑧 −2 = 0 ⇒
1
𝑧 =−
{ 2
2𝑗
5
3
1 + 4𝑧 −1 + 8𝑧 −2 = 0
8𝑧 2 + 10𝑧 + 3 = 0
−12
3
𝑧3 =
=−
−10 ± √100 − 4 · 8 · 3 −10 ± √100 − 96 −10 ± 2
16
4
𝑧=
=
=
={
−8
1
16
16
16
𝑧4 =
=−
16
2
A partir de estos polos podemos determinar las siguientes ROC. Si observamos el módulo de los polos
1
3
tenemos que corresponden a dos valores |𝑧| = 2 (primer, segundo y cuarto polo) y |𝑧| = 4 (tercer polo).
Por tanto son posibles las 3 siguientes ROC.
1
La ROC comprendida entre 0 < |𝑧| < 2.
1
3
La ROC anillo entre los dos polos 2 < |𝑧| < 4
3
La ROC por encima del polo de módulo mayor |𝑧| > 4
𝟏
9. Sea 𝒙[𝒏] una señal cuya transformada z racional 𝑿(𝒛) contiene un polo en 𝒛 = 𝟐.
Dado que
𝟏 𝒏
𝒙𝟏 [𝒏] = ( ) 𝒙[𝒏]
𝟒
Es absolutamente sumable y
𝟏 𝒏
𝒙𝟐 [𝒏] = ( ) 𝒙[𝒏]
𝟖
no es absolutamente sumable, determine si 𝒙[𝒏] es izquierda, derecha o bilateral.
Sol:
Bilateral
Resolución:
Para su resolución debemos en primer lugar determinar qué relación existe entre las ROC de la secuencia
𝑥[𝑛] y las secuencias 𝑥1 [𝑛] y 𝑥2 [𝑛].
Veamos supongamos que tenemos el siguiente par transformado
𝑇𝑍
𝑥[𝑛] ↔ 𝑋(𝑧) con ROC = 𝑅
Entonces nos preguntamos cuál sería la TZ y la ROC de una secuencia definida como
𝑥1 [𝑛] = 𝑎𝑛 𝑥[𝑛].
12
Si evaluamos su TZ.
∞
∞
𝑛
𝑋1 (𝑧) = ∑ 𝑎 𝑥[𝑛] 𝑧
𝑛=−∞
−𝑛
𝑧 −𝑛
𝑧
= ∑ 𝑥[𝑛] ( ) = 𝑋 ( )
𝑎
𝑎
𝑛=−∞
Con lo cual hemos encontrado una relación entre sus TZ’s, si además la ROC de 𝑋(𝑧) es R, ahora la ROC de
𝑧
𝑋1 (𝑧) será 𝑎𝑅. Es decir, si por ejemplo R era 𝑧1 < |𝑧| < 𝑧2 , ahora la nueva ROC debe cumplir 𝑧1 < | | < 𝑧2
𝑎
lo que implica que la ROC será 𝑎𝑧1 < |𝑧| < 𝑎𝑧2
Con este planteamiento previo, ya estamos en condiciones de responder a la pregunta del enunciado.
En primer lugar tenemos
𝑇𝑍
𝑥[𝑛] ↔ 𝑋(𝑧) con ROC = 𝑅
𝑇𝑍
1 𝑛
𝑅
( ) 𝑥[𝑛] ↔ 𝑋(4𝑧) con ROC =
4
4
𝑇𝑍
1 𝑛
𝑅
( ) 𝑥[𝑛] ↔ 𝑋(8𝑧) con ROC =
8
8
1
2
1
8
Como 𝑧 = es un polo, para 𝑥1 [𝑛] el polo estará en 𝑧 = y como es absolutamente sumable su ROC debe
incluir el círculo unidad. Por tanto la ROC de 𝑥[𝑛] debe incluir el circulo unidad, es decir, su ROC de
1
momento debe ser |𝑧| > 2. (Extendiéndose hacia el infinito)
Por otro lado para 𝑥2 [𝑛] el polo estará en 𝑧 =
1
,
16
pero no es absolutamente sumable con lo que su ROC no
incluye al círculo unidad, por tanto la ROC de 𝑥[𝑛] no se puede extender hacia el infinito, debe ser un anillo,
1
𝑟
𝑟
entre 2 < |𝑧| > 𝑟0 y un cierto valor 𝑟0 , tal que 40 > 1 (incluya el círculo unidad) y 80 < 1 (no incluya el círculo
unidad).
Como lo que nos preguntan es cómo es la señal y no su valor exacto de ROC, responderemos BILATERAL, ya
que su ROC es un anillo.
10. Valiéndose de la expansión en fracciones parciales y del hecho de que:
𝑻𝒁
𝒂𝒏 𝒖[𝒏] ↔
𝟏
, |𝒛| > |𝒂|
𝟏 − 𝒂𝒛−𝟏
Determine la TZ inversa de
𝑿(𝒛) =
𝟏 − 𝟏𝟑𝒛−𝟏
, |𝒛| > |𝟐|
(𝟏 − 𝒛−𝟏 )(𝟏 + 𝟐𝒛−𝟏 )
Sol:
𝟐
𝟕
𝒖[𝒏] + (−𝟐)𝒏 𝒖[𝒏]
𝟗
𝟗
Resolución:
𝒙[𝒏] =
Hemos de descomponer 𝑋(𝑧) en fracciones simples, es decir, resolver el sistema
13
1 − 13𝑧 −1
𝐴
𝐵
𝑋(𝑧) =
=
+
(1 − 𝑧 −1 )(1 + 2𝑧 −1 ) 1 − 𝑧 −1 1 + 2𝑧 −1
Por tanto
1
𝐴(1 + 2𝑧 −1 ) + 𝐵(1 − 𝑧 −1 ) = 1 − 3𝑧 −1
Para 𝑧 −1 = 1, tenemos
1
𝐴(1 + 2) + 𝐵(1 − 1) = 1 − 3 ⇒ 𝐴 =
1
2
2
9
Para 𝑧 −1 = − , tenemos
1
1
1
𝐴(1 − 1) + 𝐵 (1 + 2) = 1 + (3) (2) ⇒ 𝐵 =
7
9
Por tanto tras la descomposición en fracciones simples tenemos:
2
7
9
9
𝑋(𝑧) =
+
, |𝑧| > |2|
1 − 𝑧 −1 1 + 2𝑧 −1
Por tanto la secuencia será
2
7
𝑥[𝑛] = 𝑢[𝑛] + (−2)𝑛 𝑢[𝑛]
9
9
11 A continuación mostramos varias transformadas z Para cada una de ellas determine la transformada z
inversa usando tanto el método basado en la expansión en fracciones parciales.
a)𝑿(𝒛) =
𝟏−𝒛−𝟏
b) 𝑿(𝒛) =
c) 𝑿(𝒛) =
f) 𝑿(𝒛) =
𝟏
, |𝒛| < 𝟐
𝟏
𝟒
𝟏
𝒛−𝟏 −
𝟐
𝟏
𝟏− 𝒛−𝟏
𝟐
𝟏
𝒛−𝟏 −
𝟐
𝟏
𝟏− 𝒛−𝟏
𝟐
𝟏
𝒛−𝟏 −
𝟐
𝟏 −𝟏 𝟐
(𝟏− 𝒛 )
𝟐
𝟏
𝒛−𝟏 −
𝟐
𝟏 −𝟏 𝟐
(𝟏− 𝒛 )
𝟐
d) 𝑿(𝒛) =
e) 𝑿(𝒛) =
𝟏
, |𝒛| > 𝟐
𝟏
𝟏− 𝒛−𝟐
𝟒
𝟏−𝒛−𝟏
𝟏− 𝒛−𝟐
𝟏
, |𝒛| > 𝟐
𝟏
, |𝒛| < 𝟐
𝟏
, |𝒛| > 𝟐
𝟏
, |𝒛| < 𝟐
Resolución:
Apartado a)
Si resolvéis obtenéis la descomposición
14
1
3
−2
1 − 𝑧 −1
2
𝑋(𝑧) =
=
+
1 −2
1 −1
1
1 − 4𝑧
1 − 2𝑧
1 + 2 𝑧 −1
1
Como la ROC es |𝑧| > 2, se trata de una señal derecha, y recordando que:
1
→ 𝑎𝑛 𝑢[𝑛]
1 − 𝑎𝑧 −1
Entonces la secuencia será
1 1 𝑛
3
1 𝑛
𝑥[𝑛] = − ( ) 𝑢[𝑛] + (− ) 𝑢[𝑛]
2 2
2
2
Apartado b)
Se trata de la misma transformada z, a diferencia de su ROC, por tanto su descomposición será la misma.
1
3
−2
1 − 𝑧 −1
2
𝑋(𝑧) =
=
+
1 −2
1 −1
1
1 − 4𝑧
1 − 2𝑧
1 + 2 𝑧 −1
En este caso, la ROC me define una secuencia a izquierda y en este caso hemos de tener en cuenta que:
1
→ −𝑎𝑛 𝑢[−𝑛 − 1]
1 − 𝑎𝑧 −1
En consecuencia
1 1 𝑛
3
1 𝑛
𝑥[𝑛] = ( ) 𝑢[−𝑛 − 1] − (− ) 𝑢[−𝑛 − 1]
2 2
2
2
Apartado c)
Si evaluamos su descomposición, tenemos,
1
3
𝑧 −1 − 2
2
𝑋(𝑧) =
= −2 +
1 −1
1
1 − 2𝑧
1 − 2 𝑧 −1
Definida a derecha, por tanto
3 1 𝑛
𝑥[𝑛] = −2𝛿[𝑛] + ( ) 𝑢[𝑛]
2 2
Apartado d)
Si evaluamos su descomposición, tenemos,
1
3
𝑧 −1 − 2
2
𝑋(𝑧) =
= −2 +
1 −1
1
1 − 2𝑧
1 − 2 𝑧 −1
Definida a izquierda, por tanto
3 1 𝑛
𝑥[𝑛] = −2𝛿[𝑛] − ( ) 𝑢[−𝑛 − 1]
2 2
15
Apartado e)
Realizando la descomposición en fracciones simples tenemos:
1
3
𝑧 −1 − 2
−2
2
𝑋(𝑧) =
2 =
2 +
1
1
1
1 − 2 𝑧 −1
(1 − 2 𝑧 −1 )
(1 − 2 𝑧 −1 )
Donde sabemos que si la secuencia está definida a derecha, entonces (esto ahora no lo deberéis saber, ya
que se obtiene aplicando propiedades, os lo doy,)
1
→ (𝑛 + 1)𝑎𝑛 𝑢[𝑛 + 1]
(1 − 𝑎𝑧 −1 )2
Por tanto, nos queda
3
1 𝑛
1 𝑛
𝑥[𝑛] = (𝑛 + 1) ( ) 𝑢[𝑛 + 1] − 2 ( ) 𝑢[𝑛]
2
2
2
Apartado f) Lo mismo pero teniendo en cuenta a izquierda, por tanto
1
→ −(𝑛 + 1)𝑎𝑛 𝑢[−𝑛 − 2]
(1 − 𝑎𝑧 −1 )2
Y por tanto
3
1 𝑛
1 𝑛
𝑥[𝑛] = − (𝑛 + 1) ( ) 𝑢[−𝑛 − 2] + 2 ( ) 𝑢[−𝑛 − 1]
2
2
2
12 Determine la transformada z inversa de
𝑿(𝒛) =
𝟏 𝟏𝟎𝟐𝟒 − 𝒛−𝟏𝟎
[
], |𝒛| > 0
𝟏𝟎𝟐𝟒 𝟏 − 𝟏𝟐𝒛−𝟏
Sol:
𝟏 𝒏
𝒙[𝒏] = (𝟐) [𝒖[𝒏] − 𝒖[𝒏 − 𝟏𝟎]], secuencia de duración finita
Resolución:
En primer lugar la ROC nos indica que se trata de una secuencia de duración finita, además si observamos la
1
expresión se corresponde a la suma de una serie geométrica de razón 2. Es decir,
𝑝
𝑛
1
∑ ( ) 𝑧 −𝑛 =
2
𝑛=0
1 𝑝+1 −(𝑝+1)
1 − (2)
𝑧
1
1 − 2 𝑧 −1
=
1
1 − 1024 𝑧 −10
1 − 12𝑧 −1
1 10
De la igualdad determinamos que 𝑝 = 9, verificando además que (2)
1
= 1024
16
1 𝑛
Por tanto 𝑥[𝑛] = (2) [𝑢[𝑛] − 𝑢[𝑛 − 10]]
13. Calcule la secuencia asociada con cada una de las siguientes transformadas z.
a)
𝟏 − 𝟐𝒛−𝟏
𝑿(𝒛) =
, 𝐲 𝒙[𝒏] 𝐚𝐛𝐬𝐨𝐥𝐮𝐭𝐚𝐦𝐞𝐧𝐭𝐞 𝐬𝐮𝐦𝐚𝐛𝐥𝐞
𝟓
𝟏 − 𝟐 𝒛−𝟏 + 𝒛−𝟐
b)
𝟑
𝑿(𝒛) =
, 𝐲 𝒙[𝒏] 𝐚𝐛𝐬𝐨𝐥𝐮𝐭𝐚𝐦𝐞𝐧𝐭𝐞 𝐬𝐮𝐦𝐚𝐛𝐥𝐞
𝟏 𝟏 −𝟏
𝒛− 𝟒 − 𝟖𝒛
Resolución:
Apartado a)
Descomposición en fracciones parciales, hemos de encontrar las raíces del denominador:
5
1 − 𝑧 −1 + 𝑧 −2 = 0
2
2𝑧 2 − 5𝑧 + 2 = 0
𝑧1 = 2
5 ± √25 − 4 · 2 · 2 5 ± √9 5 ± 3
1
𝑧=
=
=
={
4
4
4
𝑧2 =
2
Con lo que
1 − 2𝑧 −1
1 − 2𝑧 −1
𝑋(𝑧) =
=
1
5
1 − 2 𝑧 −1 + 𝑧 −2 (1 − 2𝑧 −1 ) (1 − 2 𝑧 −1 )
Que observamos se puede simplificar. Con lo que ya queda en fracciones simples, es decir:
1
1
(1 − 2 𝑧 −1 )
Como el enunciado nos dice que es absolutamente sumable, nos está diciendo que tiene transformada de
1
Fourier, en consecuencia su ROC debe ser |𝑧| > 2 (este es el único polo que queda, el otro ha sido
𝑋(𝑧) =
simplificado y por tanto no es un polo). En definitiva es una secuencia a derecha, cuya secuencia sabemos
será de la forma
1 𝑛
𝑥[𝑛] = ( ) 𝑢[𝑛]
2
Apartado b) Nos piden hagamos la división larga, recuerda tenemos dos posibilidades de hacer la división, de
ahí, que nos digan es a derecha, luego hemos de hacer la división colocando el numerador y el denominador
en orden decreciente de z.
Por tanto en este caso:
1
1 − 𝑧 −1
2
1
[1 + 𝑧 −1
2
Al hacer la división obtenemos
17
Apartado b)
Obtengamos las raíces del denominador
1 1
𝑧 − − 𝑧 −1 = 0
4 8
8𝑧 2 − 2𝑧 − 1 = 0
1
𝑧1 =
2 ± √4 − 4 · 8 · (−1) 2 ± √36 2 ± 6
2
𝑧=
=
=
={
1
16
16
16
𝑧2 = −
4
De esta forma y operando, para que quede en función de las fracciones simples conocidas, tenemos
𝑋(𝑧) =
3
1 1
𝑧 − 4 − 8 𝑧 −1
=
3𝑧 −1
1
1
(1 + 4 𝑧 −1 ) (1 − 2 𝑧 −1 )
La cual vamos a descomponer en:
3𝑧 −1
1
1
(1 + 4 𝑧 −1 ) (1 − 2 𝑧 −1 )
=
𝐴
𝐵
+
1
1
1 + 4 𝑧 −1 1 − 2 𝑧 −1
Donde resolviendo obtenemos 𝐴 = −4 y 𝐵 = 4.
1
4
Con lo que la secuencia pedida, ya que es absolutamente sumable por tanto su ROC |𝑧| > , será
1 𝑛
1 𝑛
𝑥[𝑛] = −4 ( ) 𝑢[𝑛] + 4 ( ) 𝑢[𝑛]
4
2
14. Considere las siguientes funciones de sistema para sistemas LTI estable. Sin utilizar la transformada z
inversa, determine en cada caso si el sistema correspondientes es causal o no.
a)
𝟏 − 𝟒𝟑𝒛−𝟏+𝟏𝟐𝒛−𝟐
𝟏
𝟏
𝒛−𝟏 (𝟏 − 𝟐 𝒛−𝟏 ) (𝟏 − 𝟑 𝒛−𝟏 )
b)
𝟏
𝒛−𝟐
𝟏
𝟑
𝒛𝟐 + 𝟐 𝒛 − 𝟏𝟔
c)
𝒛+𝟏
𝟒 𝟏 −𝟐 𝟐 −𝟑
𝒛 + 𝟑 − 𝟐𝒛 − 𝟑𝒛
Sol:
a) No causal b) Causal c) No causal
18
Resolución:
Para que un sistema sea causal la ROC de la transformada z de su respuesta impulsional es el exterior de un
círculo, incluyendo el infinito.
Por otro lado, como el enunciado nos dice que el sistema además es estable la ROC debe incluir al círculo
unidad.
En definitiva debemos evaluar la ROC de cada caso y responder a si es o no causal.
Para obtener la ROC hemos de obtener los polos.
Apartado a)
En este primero se observa que 𝑧 −1 = 0 será un polo, es decir 𝑧 = ∞. Por tanto al tener un polo en el
infinito es un sistema NO CAUSAL, y ya no hace falta seguir.
Apartado b)
Si resolvemos
1
3
𝑧2 + 𝑧 −
=0
2
16
1
4
3
4
Obtenemos como polos 𝑧1 = y 𝑧2 =− . Como además es estable la ROC incluye al círculo unidad luego su
1
ROC es |𝑧| > 4, incluyendo el infinito, por tanto es CAUSAL.
Apartado c)
4
1
2
𝑧 + 3 − 2 𝑧 −2 − 3 𝑧 −3 = 0
4
Si resolvemos (aplicar Ruffini) encontramos un polo en 𝑧=3, como es estable debe incluir al círculo unidad
3
luego su ROC |𝑧| < 4 (para que lo incluya), y por tanto es la ROC de un sistema NO CAUSAL.
15. Suponga que se nos proporciona los siguientes cinco datos acerca de un sistema LTI S particular con
respuesta al impulso 𝒉[𝒏] y transformada z 𝑯(𝒛);
𝒉[𝒏] es real.
𝒉[𝒏] es derecha.
𝐥𝐢𝐦 𝑯(𝒛) = 𝟏
𝒛→∞
𝑯(𝒛) tiene dos ceros.
𝟑
𝑯(𝒛) tiene uno de sus polos en una ubicación no real en el círculo definido por |𝒛| = 𝟒.
Responda a las siguientes preguntas:
¿El sistema S es causal?. b) ¿Es estable?
Sol:
a)Sí, b) Sí
19
Resolución:
La condición 3, nos indica que en 𝑧 = ∞, 𝐻(𝑧) es una cantidad finita, por tanto no tiene un polo en el
infinito, en consecuencia PUEDE ser CAUSAL.
Si a la condición 3, le añadimos la condición 2, es a derecha, su ROC es el exterior de un círculo que por 3,
incluye al infinito por tanto ES CAUSAL.
Por ser causal y por 3, los polinomios en z del numerador y del denominador, tiene que tener el mismo
grado. Por tanto, si 4 nos dice que tenemos dos ceros, necesariamente tendremos dos polos.
Por 1, se nos dice que la respuesta impulsional es real, luego los polos y los ceros deben ser pares
conjugados. En definitiva tendrán el mismo módulo, por tanto, si conocemos que un polo está en el círculo
3
3
de |𝑧| = 4, el otro también, por tanto, su ROC teniendo en cuenta las condiciones anteriores es |𝑧| > 4, por
tanto incluye al círculo unidad y será ESTABLE.
16. Considere una señal 𝒚[𝒏] que está relacionada con dos señales 𝒙𝟏 [𝒏] y 𝒙𝟐 [𝒏] mediante
𝒚[𝒏] = 𝒙𝟏 [𝒏 + 𝟑] ∗ 𝒙𝟐 [−𝒏 + 𝟏]
Donde
𝟏 𝒏
𝟏 𝒏
[𝒏]
[𝒏]
𝒙𝟏
= ( ) 𝒖[𝒏] 𝐲 𝒙𝟐
= ( ) 𝒖[𝒏]
𝟐
𝟑
Dado que:
𝑻𝒁
𝒂𝒏 𝒖[𝒏] ↔
𝟏
, |𝒛| > 𝑎
𝟏 − 𝒂𝒛−𝟏
use las propiedades de la transformada z para determinar la transformada z 𝒀(𝒛) de 𝒚[𝒏]
Resolución:
Teniendo en cuenta los datos conocemos la TZ de las secuencias 𝑥1 [𝑛] y 𝑥2 [𝑛], a saber:
1
1
, |𝑧| >
1 −1
2
1 − 2𝑧
1
1
𝑋2 (𝑧) =
, |𝑧| >
1
3
1 − 3 𝑧 −1
Aplicando la propiedad de desplazamiento tenemos
𝑋1 (𝑧) =
𝑧3
1
, |𝑧| >
1
2
1 − 2 𝑧 −1
Para obtener 𝑥2 [−𝑛 + 1], primero desplazamos 𝑥2 [𝑛 + 1], por tanto su TZ, seá
𝑇𝑍
𝑥1 [𝑛 + 3] ↔ 𝑧 3 𝑋1 (𝑧) =
𝑇𝑍
𝑥2 [𝑛 + 1] ↔ 𝑄(𝑧) = 𝑧𝑋2 (𝑧) =
𝑧
1
, |𝑧| >
1
3
1 − 𝑧 −1
3
Y a continuación invertir, que por propiedades sabemos que:
20
𝑇𝑍
𝑥[−𝑛] ↔ 𝑋(𝑧 −1 ), |𝑧| <
1
𝑎
Por tanto en nuestro caso
𝑧 −1
, |𝑧| < 3
1
1 − 3𝑧
La TZ de la convolución es el producto de las TZ’s de cada una de las secuencias que intervienen y además su
ROC es la intersección, por tanto, el resultado pedido es:
𝑇𝑍
𝑥2 [−𝑛 + 1] ↔ 𝑄(𝑧 −1 ) =
𝑌(𝑧) = (
Con ROC
1
2
𝑧3
𝑧 −1
𝑧2
)(
)=
1
1
1
1
1 − 2 𝑧 −1
1− 3𝑧
(1 − 2 𝑧 −1 ) (1 − 3 𝑧)
< |𝑧| < 3
17. Considere un sistema LTI con respuesta al impulso
𝒉[𝒏] = {
𝒂𝒏 , 𝒏 ≥ 𝟎
𝟎, 𝒓𝒆𝒔𝒕𝒐
y la entrada
𝟏,
𝟎≤𝒏≤𝑵−𝟏
𝒙[𝒏] = {
𝟎, 𝒄𝒐𝒏 𝒐𝒕𝒓𝒐 𝒗𝒂𝒍𝒐𝒓
Determine la salida 𝒚[𝒏] mediante la evaluación explicita de la convolución discreta de 𝒉[𝒏] y 𝒙[𝒏]
Determine la salida 𝐲[𝐧] mediante el cálculo de la TZ inversa del producto de las transformadas z de la
entrada y la respuesta a la muestra unitaria.
Resolución:
Apartado a)
Resolviendo la convolución discreta:
∞
∞
𝑁−1
𝑦[𝑛] = ∑ 𝑥[𝑘]ℎ[𝑛 − 𝑘] = ∑ [𝑢[𝑘] − 𝑢[𝑘 − 𝑁]]𝑎
𝑘=−∞
𝑛−𝑘
𝑢[𝑛 − 𝑘] == ∑ 𝑎𝑛−𝑘 𝑢[𝑛 − 𝑘]
𝑘=−∞
𝑘=0
De tal forma que
0
𝑛<0
∑ 𝑎𝑛−𝑘
0 ≤ 𝑛 ≤ 𝑁−1
𝑛
𝑦[𝑛] =
𝑘=0
𝑁−1
∑ 𝑎𝑛−𝑘
𝑛>𝑁−1
{ 𝑘=0
Realizando las sumas
21
0
𝑛<0
𝑎𝑛 − 𝑎−1
0≤ 𝑛 ≤ 𝑁−1
𝑦[𝑛] = 1 − 𝑎−1
𝑎𝑛 − 𝑎𝑛−𝑁+1 𝑎−1 𝑎𝑛 (1 − 𝑎−𝑁 )
=
𝑛>𝑁−1
{
1 − 𝑎−1
1 − 𝑎−1
Apartado b)
Tenemos
1
, |𝑧| > |𝑎|
1 − 𝑎𝑧 −1
Por otro lado la secuencia de entrada es de duración finita, su ROC todo el plano
𝐻(𝑧) =
𝑁−1
𝑋(𝑧) = ∑ 𝑧 −𝑛 =
𝑛=0
1 − 𝑧 −𝑁+1 𝑧 −1 1 − 𝑧 −𝑁
=
1 − 𝑧 −1
1 − 𝑧 −1
Por tanto
𝑌(𝑧) = 𝐻(𝑧)𝑋(𝑧) = (
1
1 − 𝑧 −𝑁
)
(
) , |𝑧| > |𝑎|
1 − 𝑎𝑧 −1 1 − 𝑧 −1
Se trata pues de una secuencia definida a derecha, operando tenemos:
𝑌(𝑧) = 𝐻(𝑧)𝑋(𝑧) =
1
𝑧 −𝑁
−
, |𝑧| > |𝑎|
(1 − 𝑎𝑧 −1 )(1 − 𝑧 −1 ) (1 − 𝑎𝑧 −1 )(1 − 𝑧 −1 )
1
Si llamamos 𝑃(𝑧) = (1−𝑎𝑧−1 )(1−𝑧−1 ), entonces 𝑌(𝑧) = 𝑃(𝑧) − 𝑧 −𝑁 𝑃(𝑧), y la secuencia 𝑦[𝑛], vendrá dada
por 𝑦[𝑛] = 𝑝[𝑛] − 𝑝[𝑛 − 𝑁] (hemos aplicado la propiedad de desplazamiento de la TZ.
Por tanto hemos de obtener la transformada de Fourier inversa de 𝑃(𝑧). Si descomponemos en fracciones
simples, obtenemos:
1⁄
1⁄
(1 − 𝑎−1 )
(1 − 𝑎)
𝑃(𝑧) =
+
1 − 𝑧 −1
1 − 𝑎𝑧 −1
Entonces tenemos
𝑝[𝑛] =
1
1
𝑢[𝑛] +
𝑎𝑛 𝑢[𝑛]
(1 − 𝑎)
(1 − 𝑎−1 )
Simplificando, nos queda
𝑝[𝑛] = −
𝑎−1
1
1
[𝑎𝑛 − 𝑎−1 ]𝑢[𝑛]
𝑢[𝑛] +
𝑎𝑛 𝑢[𝑛] =
−1
−1
(1 − 𝑎 )
(1 − 𝑎 )
(1 − 𝑎−1 )
En definitiva
𝑦[𝑛] = 𝑝[𝑛] − 𝑝[𝑛 − 𝑁] ==
1
1
[𝑎𝑛 − 𝑎−1 ]𝑢[𝑛] −
[𝑎𝑛−𝑁 − 𝑎−1 ]𝑢[𝑛 − 𝑁]
(1 − 𝑎−1 )
(1 − 𝑎−1 )
En definitiva
22
Para 𝑛 < 0 , la salida será cero.
1
Para 0 ≤ 𝑛 ≤ 𝑁 − 1, será el valor (1−𝑎−1 ) [𝑎𝑛 − 𝑎−1 ]
Para 𝑛 > 𝑁 − 1, la salida vendrá dada por
1
[𝑎𝑛
(1−𝑎−1 )
1
1
− 𝑎−1 ] − (1−𝑎−1 ) [𝑎𝑛−𝑁 − 𝑎−1 ] = (1−𝑎−1 ) [𝑎𝑛 − 𝑎−1 − 𝑎𝑛−𝑁 + 𝑎−1 ]=
𝑎 𝑛 (1−𝑎 −𝑁 )
1−𝑎 −1
En resumen (por tanto coinciden)
0
𝑛<0
𝑎𝑛 − 𝑎−1
0≤𝑛 ≤𝑁−1
𝑦[𝑛] = 1 − 𝑎−1
𝑎𝑛 (1 − 𝑎−𝑁 )
𝑛 > 𝑁−1
{ 1 − 𝑎−1
18. Determine la función del sistema para el sistema LTI causal con ecuación en diferencias
𝟏
𝟏
𝒚[𝒏] − 𝒚[𝒏 − 𝟏] + 𝒚[𝒏 − 𝟐] = 𝒙[𝒏]
𝟐
𝟒
Resolución:
Sea 𝑌(𝑧), la transformada z de 𝑦[𝑛], entonces y aplicando la propiedad de desplazamiento tenemos que:
1
1
𝑌(𝑧) − 𝑧 −1 𝑌(𝑧) + 𝑧 −2 𝑌(𝑧) = 𝑋(𝑧)
2
4
1 −1 1 −2
𝑌(𝑧) (1 − 𝑧 + 𝑧 ) = 𝑋(𝑧)
2
4
Como en un sistema LTI 𝑌(𝑧) = 𝐻(𝑧)𝑋(𝑧), entonces se verifica que
𝐻(𝑧) =
𝑌(𝑧)
𝑋(𝑧)
Por tanto en nuestro caso
𝑌(𝑧)
1
=
𝑋(𝑧) 1 − 1 𝑧 −1 + 1 𝑧 −2
2
4
Para acabar de responder al apartado a) sólo nos falta determinar la ROC, para ello hemos de obtener los
polos, si resolvemos los polos vienen dados por:
𝐻(𝑧) =
𝑧=
1
√3
±𝑗
4
4
Tomando su módulo
1
3
1 1
|𝑧| = √ +
=√ =
16 16
4 2
Como el enunciado nos dice que la respuesta impulsional es causal, se nos está indicando que la ROC debe
1
incluir el infinito, por tanto su ROC es |𝑧| > 2
23