Tarea 1 de ANALISIS DE SISTEMAS LINEALES Victor Miranda - Benjamín Fica
Anuncio

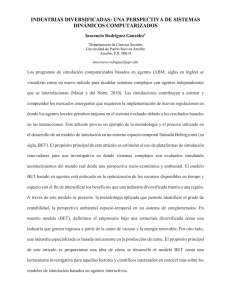
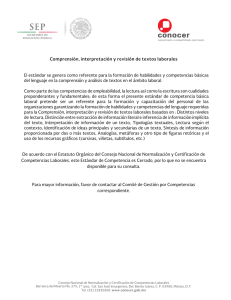
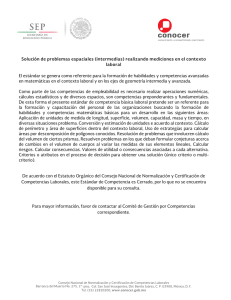
Tarea 1 Análisis de Sistemas Lineales Autor(es), Víctor Miranda, Benjamín Fica Resumen—El análisis de sistemas lineales es una herramienta fundamental en la ingeniería y en la física, ya que permite describir y predecir el comportamiento de sistemas físicos y eléctricos. Los sistemas lineales se caracterizan por tener una respuesta proporcional a la entrada, lo que los hace más fácilmente analizables que los sistemas no lineales. En esta tarea, se abordarán diferentes aspectos del análisis de sistemas lineales, incluyendo la representación gráfica de funciones, la manipulación de señales y la resolución de ecuaciones diferenciales para determinar la función de transferencia y la ganancia de un sistema. PREGUNTA 1 a) Grafique la función dada por la siguiente expresión: desplaza 1 unidad hacia la derecha en el tiempo. 𝑟 (𝑡 + 2) − 𝑟 (𝑡 − 1) − 𝑢 (𝑡 − 1) En la primera pregunta se pide graficar la función dada por la expresión 𝑟 (𝑡 + 2) − 𝑟 (𝑡 − 1) − 𝑢 (𝑡 − 1). Esta función puede descomponerse en tres términos. La expresión 𝑟 (𝑡 + 2), que representa una función rampa con pendiente 1 que se desplaza 2 unidades hacia la izquierda en el tiempo La expresión −𝑢 (𝑡 − 1), que representa una función escalón unitario que se activa en el tiempo t=1 La expresión −𝑟 (𝑡 − 1), que representa una función rampa con pendiente 1 que se La figura resultante de la suma de estas tres funciones es una función que se inicia en t=-2 y se extiende hasta t=2. La gráfica resultante puede ser construida utilizando herramientas de software de dibujo o de cálculo simbólico. PREGUNTA 2 Para la siguiente función, se pide: a) La señal quede invertida y su amplitud quede comprendida entre -3 y 4 1.Como primer paso se crea un programa en MATLAB tiene como objetivo crear y graficar una señal modificada a partir de una señal original y varias transformaciones. Primero, se define el vector de tiempo "t" que contiene valores desde -5 hasta 5 con un paso de 0.001. Luego, se realiza la normalización de la señal original mediante la definición de dos parámetros alfa (alp) y beta (bet). Alfa se establece en 1/6 y beta en 1/2. t = (-5:0.001:5)'; %Normalizado de la señal alp = 1/6; bet =-1/2; A continuación, se definen tres escalones unitarios "U1", "U2" y "U3" que se utilizarán para construir la señal original "F". Cada escalón se define como una función que es 1 para valores de tiempo iguales o mayores que un valor específico y 0 en cualquier otro caso. En este caso, U1 se define para valores de tiempo iguales o mayores que -2, U2 se define para valores de tiempo iguales o mayores que 0, y U3 se define para valores de tiempo iguales o mayores que 2. La señal original "F" se construye mediante la combinación de los escalones unitarios con las operaciones aritméticas necesarias para obtener la señal deseada % escalón unitario U1 = (t>=-2); U2 = (t>=0); U3 = (t>=2); F=((2.*U1)+3)+4.*U2-3.*U3; SCRIPT COMPLETO MATLAB DEL PROGRAMA La señal "G" se obtiene al multiplicar la señal original "F" por el valor de alfa y luego sumar el valor de beta. En este caso, esto resulta en la señal original normalizada. clear all close all clc G= alp*F+bet; % Definición de la variable independiente t t = (-5:0.001:5)'; % Normalización de la señal alp = 1/6; bet = -1/2; % Ajuste de amplitud y reflexión de la señal alp2 = -7; bet2 = 4; % Definición de los escalones unitarios U1 = (t >= -2); U2 = (t >= 0); U3 = (t >= 2); Finalmente, la señal "H" se obtiene al multiplicar la señal "G" por el valor de alfa2 y luego sumar el valor de beta2. En este caso, esto resulta en la inversión de la señal original y el desplazamiento de la señal. alp2 = -7; bet2 = 4; H=alp2.*G+bet2 % Definición de la función original F = ((2 .* U1) + 3) + 4 .* U2 - 3 .* U3; % Normalización de la señal G = alp * F + bet; % Aplicación de la transformación lineal para ajustar la amplitud y reflexionar la señal H = alp2 .* G + bet2; % Gráfica de la señal resultante plot(t, H) % Definición de los límites de la gráfica axis([-5; 5; -9; 5]); % Habilitación de la cuadrícula en la gráfica grid on b) El tiempo de la señal quede comprendido entre -15 y 15 De las mismas variables para la transformación de la señal. alp y bet son utilizados para normalizar la señal entre un rango específico. alp2 y bet2 se utilizan para otra transformación de la señal. a es un factor de amplificación del tiempo para que la señal quede comprendida entre -15 y 15. bet = -1/2; % Factor Normalización de la señal de alp2 = -7; % Factor de amplificación bet2 = 4; % Factor de desplazamiento a = 1/7.5; % Factor de amplificación del tiempo % Escalones unitarios U1 = (a*t >= -2); % Escalón unitario desplazado hacia la izquierda U2 = (a*t >= 0); % Escalón unitario en t=0 U3 = (a*t >= 2); % Escalón unitario desplazado hacia la derecha % Función resultante de Normalización de la señal F = ((2.*U1)+3)+4.*U2-3.*U3; SCRIPT COMPLETO MATLAB DEL PROGRAMA clear all % Limpia las variables guardadas en la memoria close all % Cierra todas las ventanas de figuras previamente abiertas clc % Limpia la ventana de comandos t = (-20:0.0001:20)’; % Vector de tiempo de -20 a 20 con incrementos de 0.0001 % Normalización de la señal alp = 1/6; % Factor de Normalización de la señal la % Transformación de la original con normalización G = alp*F+bet; señal % Transformación normalizada H = alp2.*G+bet2; señal de la % Gráfica de la señal resultante plot(t, H) axis([-18 18 -5 6]) % Establece los límites de los ejes x e y de la gráfica grid on % Habilita la cuadrícula en la gráfica PREGUNTA 3 𝐻(𝑆) = Pregunta 3 Para el circuito eléctrico RLC de la Figura N°1. 𝑉𝑐 (𝑆) 𝑉𝑖𝑛 (𝑆) 1 = 2 𝐿𝐶𝑆 + 𝑅𝐶𝑆 + 1 c) Determine la ganancia dc del sistema, si 𝐿 =10𝑚𝐻, 𝑅 = 100Ω, 𝐶 = 10𝜇𝐹. Para calcular la ganancia DC del sistema, debemos encontrar la función de transferencia en DC. La función de transferencia para este circuito es: Figura N°1.- Cto. RLC serie con capacitor tomado como de salida a) Determine la ecuación diferencial de 2do orden en función de 𝑣𝑐(𝑡), que lo representa: A continuación, se procede a un LVK en el cto. de la fuente: 𝑒𝑖𝑛 (𝑡) = 𝑣𝑙 (𝑡) + 𝑣𝑅 (𝑡) + 𝑣𝑐 (𝑡) Para 𝑒𝑖𝑛 (𝑡) = 𝑣𝑖𝑛 (𝑡) 𝑣𝑖𝑛 (𝑡) = 𝑣𝑙 (𝑡) + 𝑣𝑅 (𝑡) + 𝑣𝑐 (𝑡) 𝑑𝑖(𝑡) 𝑣𝑖𝑛(𝑡) = 𝐿 + 𝑅𝑖(𝑡) + 1𝐶∫ 𝑖(𝑡)𝑑𝑡 𝑑𝑡 Se sabe que: 1 𝑣𝑐 (𝑡) = ∫ 𝑖(𝑡)𝑑𝑡 𝐶 𝑑 𝑑 (𝑡)) ( 𝐶𝑣𝑐 = (∫ 𝑖(𝑡)𝑑𝑡) 𝑑𝑡 𝑑𝑡 𝑑𝑣𝑐 (𝑡) 𝐶 = 𝑖(𝑡) 𝑑𝑡 Reemplazando 𝑖(𝑡): 𝑑𝑑𝑣𝑐 𝑑𝑣𝑐 (𝑡) 1 𝑑𝑣𝑐 (𝑡) 𝑣𝑖𝑛(𝑡) = 𝐿𝐶 + 𝑅𝐶 + ∫𝐶 𝑑𝑡 𝑑𝑡𝑑𝑡 𝑑𝑡 𝐶 𝑑𝑡 De esta forma se obtiene la ecuación diferencial de 2do orden en función de 𝑣𝑐(𝑡): 𝑣𝑐 (𝑡) = −𝐿𝐶 𝑑2 𝑣𝑐 (𝑡) 𝑑𝑣𝑐 (𝑡) − 𝑅𝐶 + 𝑣𝑖𝑛(𝑡) 𝑑𝑡 2 𝑑𝑡 b) Determine la función de transferencia 𝑣𝑐(𝑆)/𝑢(𝑆) con condiciones iniciales nulas: 𝑣𝑖𝑛(𝑡) = 𝐿𝐶 𝑑 2 𝑣𝑐 (𝑡) 𝑑𝑣𝑐 (𝑡) + 𝑅𝐶 + 𝑣𝑐 (𝑡) / 𝐿𝐴𝑃𝐿𝐴𝐶𝐸() 𝑑𝑡 2 𝑑𝑡 𝑉𝑖𝑛 (𝑆) = 𝐿𝐶[𝑆 2 𝑉𝑐 − 𝑆𝑉𝑐 (0) − 𝑑𝑣𝑐 (0) ] + 𝑅𝐶[𝑆𝑉𝑐 (𝑆) − 𝑣𝑐 (0)] + 𝑉𝑐 (𝑆) 𝑑𝑡 𝑉𝑖𝑛 (𝑆) = 𝐿𝐶𝑆 2 𝑉𝑐 (𝑆) + 𝑅𝐶𝑆𝑉𝑐 (𝑆) + 𝑉𝑐 (𝑆) 𝑉𝑖𝑛 (𝑆) = 𝑉𝑐 (𝑆)(𝐿𝐶𝑆 2 + 𝑅𝐶𝑆 + 1) 𝑉𝑐 (𝑆) = 𝑉𝑖𝑛 (𝑆) + 𝑅𝐶𝑆 + 1 𝐿𝐶𝑆 2 Para la función de transferencia queda como: 𝐻(𝑆) = 𝑉𝑐 (𝑆) 𝑉𝑖𝑛 (𝑆) 1 = 𝐿𝐶𝑆2 + 𝑅𝐶𝑆 + 1 Por ende, se evalúa la función de transferencia cuando 𝑆 tiende a 0, en resumidas cuentas, para encontrar la ganancia DC, simplemente hacemos S=0 en la función de transferencia: lim 𝑓(𝑡) = lim 𝑆 ∗ 𝐻(𝑆) ∗ 𝑈(𝑆) 𝑡→∞ 𝑆→0 lim 𝑆 ∗ 𝑆→0 lim 1 2 𝐿𝐶𝑆 + 𝑅𝐶𝑆 + 1 1 2 𝑆→0 𝐿𝐶(0) + 𝑅𝐶(0) + 1 = ∗ 1 𝑆 1 += 1 1 La ganancia DC del sistema queda como: lim 1 2 𝑆→0 𝐿𝐶(0) + 𝑅𝐶(0) + 1 = 1 += 1 1 Por lo tanto, la ganancia DC del sistema es de 1. Esto significa que la señal de entrada DC se amplifica por una cantidad unitaria, lo que equivale a que la señal de salida DC es igual a la señal de entrada DC.