nicol ás alejandro barnafi wittwer
Mathematical models and numerical methods for cardiac
poromechanics
M AT H E M AT I C A L M O D E L S A N D N U M E R I C A L M E T H O D S F O R
CARDIAC POROMECHANICS
nicol ás alejandro barnafi wittwer
January 2021
Advisor:
Alfio Maria Quarteroni
Tutor:
Luca Dede’
Paolo Zunino
Chair of the Doctoral Programe:
Irene Sabadini
Nicolás Alejandro Barnafi Wittwer: Mathematical models and numerical
methods for cardiac poromechanics, © January 2021
ABSTRACT
Cardiac perfusion describes the heart’s blood supply, which arrives
through a complex network of vessels that surround it, known as
coronary vessels. The mathematical modeling of this process involves
the solution of complex multi-physics problems, which considers on
one side the coronary vessels and on the other side the heart tissue,
which is divided into the tissue itself and the porous structure induced by the ramifications of the vessels. This composition motivates
the use of poromechanics models for its accurate approximation.
This thesis serves two goals. The first one is the creation of an adequate framework for the development of efficient numerical methods
for the poromechanics problem; the second one is the construction of
an efficient numerical strategy which embeds cardiac perfusion into
a coupled full-heart simulation. We focus first on the analysis of a
linearized problem, at both continuous and discrete levels. Its study
reveals a saddle point structure in which the incompressibility constraint consists in a sum of the velocity of both fluid and solid phases,
weighted by the material porosities. We show that the use of a TaylorHood type of finite elements is inf-sup stable. After this, we develop
splitting schemes for the linearized problem, for which we adapt classic splitting schemes from Biot’s consolidation model and provide the
corresponding convergence analysis.
For the perfusion model, we consider the coronary vessels as a network of 0D elements, where we extend the existing lumped models to
allow them to handle arbitrary combinations of boundary conditions
and study its numerical properties. Poromechanics models strongly
depend on constitutive modeling. In this respect, we present a novel
decomposition of the energy, which takes the form of a barrier function for the porosity. Then, we present a comprehensive comparison
of nonlinear solvers for the poromechanics problem under consideration. Finally, we propose solving the coupled perfusion problem
through a fixed point scheme, and test our methods on the realistic
ventricle geometry provided by Zygote by decoupling model governing the mechanical deformation of the heart.
Through our work, we give guidelines for efficient and robust strategies for the numerical approximation of linear poromechanics, as well
as provide promising preliminary results for the nonlinear scenario.
We then propose a novel poromechanics modeling framework which
is able to reproduce physiological conditions of a healthy heartbeat,
vii
1
and thus presents a powerful tool for the efficient creation of in-silico
models.
SOMMARIO
La perfusione cardiaca descrive l’afflusso di sangue del cuore, il cui arriva attraverso una complessa rete di vaso che lo circondano, conosciuta come vasi coronarici. La modellistica matematica di questo fenomeno
coinvolge la soluzione di complessi fenomeni multi-fisici, che considerano da un lato i vasi, e dall’altro il tessuto cardiaco. Esso viene
diviso a sua volta nel tessuto stesso e nella struttura porosa indotta
dalle ramificazioni dei vasi. Questa composizione è la principale motivazione per l’utilizzo di modelli poromeccanici, che considerano il
cuore come un continuo in cui coessistono muscolo e sangue.
Questa tesi ha due obbiettivi. Il primo è quello di costruire un
marco teorico adeguato per lo sviluppo di solutori efficenti per il
problema poromeccanico; il secondo è la costruzione d’una strategia
numerica che permetta l’integrazione della perfusione cardiaca in un
modello di cuore completo. Ci focalizziamo nell’analisi d’un problema linearizzato sia a livello continuo che discreto. Questo studio
rivela un’interessante struttura di punto sella, in cui il vincolo di incomprimibilità consiste nella somma delle velocità fluida e solida, pesate per la porosità del materiale, e mostriamo che l’utilizzo di spazi
di elementi finiti di tipo Taylor-Hood garantiscono la stabilità inf-sup
di questo modello. Dopo questo, sviluppiamo schemi di disaccoppiamento per il problema linearizzato, per cui adattiamo gli schemi
fixed-stress e undrained ampiamente usati per la soluzione del modello di consolidazione di Biot e dimostriamo che, cosı̀ come in Biot,
sono incondizionatamente convergenti.
Per quanto riguarda il modello di perfusione, consideriamo i vasi
coronarici come una rete di elementi 0D, dove estendiamo la teoria classica di modelli di Navier-Stokes ridotti per renderli flessibili
nel utilizzo di diverse condizioni di bordo, e poi studiamo le loro
proprietà numeriche. I modelli poromeccanici dipendono fortemente
della modellistica costitutive, per cui presentiamo una nuova decomposizione del energia, che ha la forma d’una funzione di barriera
per la porosità. Poi, presentiamo uno studio comparativo di solutori
nonlineari per il problema poromeccanico considerato. Finalmente,
proponiamo risolvere il problema accoppiato tramite uno schema di
punto fisso, e proviamo i nostri metodi nella geometria realistica di
ventricolo fornita da Zygote. Un’ipotesi fondamentale è quella di disaccoppiare la meccanica, che permette di calcolare la deformazione in
una prima fase, e poi utilizzare essa per le simulazioni di perfusione.
viii
Con il nostro lavoro, forniamo delle guide per strategie efficienti e
robuste per l’approssimazione numerica della poromecanica lineare,
e anche mettiamo a disposizione promettenti risultati per lo studio
di metodi Quasi-Newton per la poromeccanica nonlineare. Provvediamo pure un modello nuovo di poromeccanica, sia a livello di circolazione periferica che a livello del tessuto, che è in grado di riprodurre
un battito cardiaco in condizioni fisiologica, e quindi è uno strumento
potente per lo sviluppo di modelli in-silico.
ix
If I have seen further, it is by standing on the shoulders of Giants.
Isaac Newton, some time ago.
ACKNOWLEDGMENTS
I cannot start describing this journey without thanking the people
who made it possible. I thus heartfully thank Alfio for trusting in
me to work in his group, it was harsh but nourishing, and I will
forever admire his relentless work-drive. I really hope that one day
I can at least grasp that sparkle, clarity and vision. Then, I would
like to thank my two mentors: Thank you Luca for your kindness
and honesty, these are indeed the pillars of the researcher I aspire
to become. Also thank you Paolo for your guidance and loyalty: The
foundations of what we have built are rock solid, and without your
insight it would have been impossible to accomplish it.
The pursue of scientific knowledge refers to the abnormal pleasure
found in constant failure, and your area of expertise simply refers
to where you prefer to fail more often. Mathematical modeling is a
beautiful discipline, with such an immense world of things that can
go wrong. It is indeed quite the fierce companion: You leave your office every day with error messages flying around you, merrily dancing an hymn to failure and doing so restlessly while you walk back
home, while you cook, while you shower, while you eat. But then,
there is this magical moment, when the truth you thought to have so
long forsaken you appears. It is not so clear at first, but when you
look back and close a little bit your eyes, you can see it. It is success, childishly playing with the sea of failure that surrounds you. It
is that moment, that precise instant, which makes the entire journey
worth its pain. All of the wasted hours banging your head against a
wall now seem not so wasted after all, and instead reveal themselves
as an investment; it all finally makes sense. Most fundamentally, it
makes sense yet so gratefully, because you did not get there alone. It
would have been otherwise impossible, and that realization itself is a
precious treasure.
When you look back on having done something right, there is so
much to be thankful for, that it gets your head spinning. The final
product in science is an article, but an entire page should be filled
with the people who were actually involved in it. The ideas I had
were inspired by those of others, countless beautiful hours were spent
in front of an empty whiteboard, anxious to reveal the answers I was
seeking, and even further: I actually had an office, there was an administrative team who kept things neatly running under the hood
and I had a group of colleagues without which the burden of a PhD
would have been unbearable.
xi
Allow me to further waste your time with precision. Thank you
Eventimate (Laura & Anna) for your energy, Susanna for reminding
me to fill that dreaded time sheet, Nancy for your shy smile and thank
you so much Luca Paglieri for your warm company–most needed in
these cold times–and your fantastic disposition for helping. You were
the first soul to support me in Italy. I will be forever inspired by Marco
Verani’s tender approach, which I believe to be the only possible way
of achieving a brighter future, as well as the openness of Gianmaria
Verzini. They did not follow my work, but I will nevertheless follow
their teachings with great pride.
I ever so deeply thank the fantastic colleagues I had. Sharing joy
and despair with you was irreplaceable, and I promise you to cherish
the beautiful memories we now share each one of the days I have left.
In order: Martin, your warmth is the strongest. You strive for unity,
very un-italianly, and kept us tight. You are humble and sensitive, I
hope people could learn to be more like you. Silvia, my lonely beginning was not so lonely as it was graced by your empathy. You were
my first italian teacher and I loved finding out about the shared joy
for those silly images filled with text (yes, those). Anna, I appreciate
so much the sensitivity you revealed, I would have never guessed.
Do not lose your spark, it will take you far. Simone, you impersonate
kindness and are a true friend. I trust you deeply, and thank your
trust, honesty and so many great times. I will forever admire your
temperance. Davide, thank you for your sympathy and sense of justice. People are political, don’t let anyone reject that with frivolity.
Roberto, I thought that I would never get close to the language I used
back home, but you showed me otherwise. You are right, sometimes
things are better said than not. Ste, hidden behind your Milan persona resides a huge heart. You were there when I was alone and in
dire need of a pair of ears and a beer to detoxify. I am sure I helped
you do so as well, and hope we do so for much longer. Trust yourself,
you are a fantastic woman. Nicola, inside of you resides a strong and
resilient man which I admire, thank you for that year next to me, you
were great company. Albi, your shyness made it an adventure to get
to know you, and now I know how cheerful and enjoyable you are
(and what an incredible sense of humor you have). I thank you for
your company those Saturdays, it was never just a coffee. Yves, we
share so much, and you are probably the only one who truly understands my situation in this land. Your advice is hard to get out of
you, but very precious. It is fine to be weak, those wounds make us
stronger and wiser. Bubba, you were an outlander in this city, your
attitude was golden and your departure very much too early. Your
memory is good company, but it will never be as good as the one you
gave. Luca, your wisdom is flabbergasting (finally used it), and despite
your brilliance you always had time for whiteboard and coffee. I hope
I can be a little more like you in whatever this life awaits. Luda, I find
xii
your honesty beautiful, and your conviction very powerful. No one
can stop you, only yourself. Thanks for that concert, it was amazing.
Giulia, you know how we met, it was so intense! I admire your rocksolid determination, and I really hope that whenever you write some
code you think about me. Giorgio, you are probably the funniest person in Italy, please don’t stop sharing that light with your dear ones.
At least I really appreciated it. Symo, you are such a fantastic person.
I know you won’t agree, but please at least trust me on this one. You
are a great friend and colleague, and somehow we pulled through
those last months of suffering together. Fra, your diligence is a force
of nature which I admire, so delicate and polite. Michele, your silent
approach doesn’t do justice to you, you are dependable and great
company, besides being easy-going and a great programmer. Thank
you for helping me code, I probably wouldn’t have finished without your advice. Eleonora, thank you for all your brutal but equally
wise words. I admire your wit, which you carry weightlessly. Elena,
it this hard times, knowing you was very enriching. You are a great
person, and your company in otherwise dull evenings made this pandemic bearable. Thank you for sharing such overwhelming kindness.
Chiara M, thank you for sharing your blinding light with me, you
wouldn’t know but it was fundamental in dark times, and it came
out so naturally. Chiara F, thank you for always being there to share a
special moment in the most varied scenarios imaginable: Music, coffee and plants. You company was, and is, invaluable. Matteo, you
always made time that we could lose together, you feel so strongly
and don’t show it. Please do, let others enjoy you as much as I did.
Edo, we think so differently and hang out so well. Playing with you
was a great pleasure, but sharing with you even more so. Trump is
gone, don’t be sad. No one is :).
Post docs: Ivan, I unendingly thank you for cherishing company,
discussing maths with you was always a pleasure, but equally so was
sharing life experiences while teamed with a glass of beer. Marco, you
might not even remember, but yours was one of the small impulses
that actually gave me strength to push forward. Thank you for your
faith, it paid out great. Stefano, thank you for your eternal comfort
regarding our situation in the lab. Your shared human experience was
very much fundamental to end those three years, thank you. Pasq,
you are last on purpose, keep the best for last: I will forever hold dear
your friendship, loyalty and trust. Thank you for sharing so much, I
found in you someone in which I could see myself.
To the generation sfigata: Against all odds, we made it! Nothing can
stop us now. To MOXeca: You were vital in my PhD journey, thank
you so much! To Tender: Thank you for always receiving me, you were
greart company. A special nomination, even though they will never
get to read this, to the fantastic Matthias and Rukye. You were very
special friends in my PhD, and I really hope we can meet again one
xiii
day. I also want to thank my chilean colleagues, Daniel, Gabriel and
Ricardo; with them I have experienced what I believe science should
be, and shall it still be in whatever comes!
I thank my family, I have been–as almost every family member on
earth probably–very ungrateful for their loyalty, but I have always
kept it in great treasure. You are always there, and although I try my
best not to, I always count on you. Thank you very much, I love you.
Dani, I will never thank you enough. Without you I would be lost;
you are my radar and compass; my candle in the dark and my bright
life partner in the light. I will always thank you for your energy,
your company and your overwhelming common sense. Without you I
would have never arrived so far, and maybe I would have never even
strived for it. You motivate me to be the best version of myself, and
I owe you my life for it. I thank you for your enormous sacrifice, for
every hug, every kiss, every smile and every tear. For everything, I
love you.
This was an absolute life changing experience, in every possible
sense. I cannot stress this enough as I, three years ago, would have
never imagined the problems that have arrived lately... like seriously,
a pandemic? The beginning of an academic career is already heavy,
and these many things got me flirting with depression ever so closely.
To you who are reading this, never reject a beer on Friday. You will not
remember how hard you worked, but instead how happy you were.
You will not remember the nights you didn’t sleep for a deadline, but
instead your sleep deprived self will linger forever, for well accompanied nights do not go away. I close this chapter, and whatever comes,
let it do so. I am ready.
xiv
CONTENTS
sommario
viii
introduction
1
2.1 Context and state of the art . . . . . . . . . . . . . . . .
1
2.2 Anatomy of the heart . . . . . . . . . . . . . . . . . . . .
3
2.3 Software and geometry . . . . . . . . . . . . . . . . . . .
6
2.4 Poroelasticity . . . . . . . . . . . . . . . . . . . . . . . .
8
2.4.1 Governing equations . . . . . . . . . . . . . . . . 13
2.5 Our contributions . . . . . . . . . . . . . . . . . . . . . . 15
2.6 Fundamental notions, definitions and notation . . . . . 18
3 linearized poromechanics
21
3.1 The linearized poromechanics model . . . . . . . . . . 21
3.1.1 Newton solver and the tangent model . . . . . . 22
3.1.2 Variational formulation . . . . . . . . . . . . . . 25
3.2 Analysis of the semi-discrete problem . . . . . . . . . . 27
3.2.1 Existence and uniqueness . . . . . . . . . . . . . 29
3.2.2 Stability analysis of the semi-discrete problem . 32
3.3 Analysis of the continuous problem . . . . . . . . . . . 36
3.4 Error analysis of a fully discrete formulation . . . . . . 41
3.4.1 Numerical tests . . . . . . . . . . . . . . . . . . . 49
3.5 The inf-sup condition . . . . . . . . . . . . . . . . . . . . 49
3.5.1 The weighted inf-sup condition . . . . . . . . . 50
3.5.2 The inf-sup condition for the poromechanics problem . . . . . . . . . . . . . . . . . . . . . . . . . . 58
3.5.3 Computation of the inf-sup constant . . . . . . . 59
3.6 Numerical tests . . . . . . . . . . . . . . . . . . . . . . . 61
3.6.1 Swelling test . . . . . . . . . . . . . . . . . . . . . 61
3.6.2 Inf-sup stability test . . . . . . . . . . . . . . . . 63
3.6.3 Contraction of an idealized model of left ventricle 63
3.7 Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . 65
4 iterative schemes for poromechanics
67
4.1 Numerical approximation of the linearized problem . . 68
4.2 The undrained splitting scheme . . . . . . . . . . . . . . 72
4.2.1 Problem formulation as convex minimization . 72
4.2.2 Robust splitting via alternating minimization . 73
4.3 A diagonally stabilized splitting scheme . . . . . . . . . 75
4.3.1 Two-way splitting scheme . . . . . . . . . . . . . 75
4.3.2 Three-way splitting scheme . . . . . . . . . . . . 76
4.4 Convergence Analysis . . . . . . . . . . . . . . . . . . . 80
4.4.1 Convergence analysis of the undrained split . . 80
4.4.2 Convergence analysis of diagonal split . . . . . 85
4.5 Numerical tests . . . . . . . . . . . . . . . . . . . . . . . 93
4.5.1 Anderson acceleration . . . . . . . . . . . . . . . 95
1
2
xv
xvi
contents
Undrained split sensitivity analysis . . . . . . . 96
Parameter study for diagonal split . . . . . . . . 97
Schemes comparison . . . . . . . . . . . . . . . . 104
Comparison of splitting versus monolithic approaches . . . . . . . . . . . . . . . . . . . . . . . 106
4.6 Iterative schemes for Cardiac Poromechanics . . . . . . 107
4.7 Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . 111
5 numerical solvers for cardiac perfusion
115
5.1 Mathematical modeling of the epicardial coronary vessels117
5.1.1 Numerical tests . . . . . . . . . . . . . . . . . . . 120
5.2 Mathematical model for myocardial poromechanics . . 123
5.2.1 Mathematical properties of the model . . . . . . 127
5.2.2 Constitutive modeling . . . . . . . . . . . . . . . 128
5.2.3 Constitutive model for cardiac perfusion . . . . 132
5.2.4 Numerical solvers comparison . . . . . . . . . . 134
5.3 Coupled perfusion problem . . . . . . . . . . . . . . . . 140
5.4 The one-way coupling strategy . . . . . . . . . . . . . . 143
5.5 Numerical tests . . . . . . . . . . . . . . . . . . . . . . . 144
5.5.1 Numerical tests with a Bernoulli 0D coronary
flow . . . . . . . . . . . . . . . . . . . . . . . . . . 146
5.5.2 Numerical tests with lumped coronary network 147
5.6 Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . 151
6 conclusions
155
4.5.2
4.5.3
4.5.4
4.5.5
Appendix
a saddle point problems
b numerical methods for nonlinear problems
c convergence of nonlinear model
159
161
163
165
bibliography
171
LIST OF FIGURES
Figure 1
Figure 2
Figure 3
Figure 4
Figure 5
Figure 6
Figure 7
Figure 8
Figure 9
Figure 10
Figure 11
Figure 12
Figure 13
Figure 14
Figure 15
Anterior view of the heart. Images by Blausen
Medical Communications, Inc. under Creative
Commons license. . . . . . . . . . . . . . . . . .
7
Wiggers diagram (a) in its classical representation [107] and (b) with the coronaries in red
[117]. . . . . . . . . . . . . . . . . . . . . . . . .
7
Left ventricle geometries used in this work. . .
9
Representation of porous media in poromechanics. . . . . . . . . . . . . . . . . . . . . . . . . . .
9
Comparison of the pressure in a swelling test
at T = 1.5. First row on a solid dominant regime
(φ = 10−8 ), second row on a mixed regime
(φ = 0.5) and third row on a fluid dominant
regime (φ = 1 − 10−4 ). All tests are performed
with P1 elements for the pressure. See Section
3.6.1 for a detailed description of the test case.
51
Inf-sup constant β with respect to the porosity. Images (a), (b), (c) and (d) have all parameters set to 1, instead (e) and (f) use a realistic parameters. The code Pa − Pb on the plots
stands for a fluid-solid-pressure discretization
with elements Pa − Pb − P1 . . . . . . . . . . . 62
(a) Boundary conditions for the swelling test,
(b) results at time t = 1. . . . . . . . . . . . . . 63
Pressure of inf-sup test for all combinations of
fluid/displacement finite element spaces. . . . 64
Results of the (nonlinear) left ventricle test simulation. The top row shows the deformed geometry, pressure represented by colors, fluid
velocity by arrows. The bottom row shows the
deformed geometry from above so as to observe the twisting due to the fibers. . . . . . . 65
Swelling test at time t = 1s. . . . . . . . . . . . 94
Footing test at time t = 0.5s. . . . . . . . . . . . 94
Perfusion test at time t = 1s. . . . . . . . . . . . 95
Representation of multi-compartment model from
[60]. . . . . . . . . . . . . . . . . . . . . . . . . . 116
Example network. . . . . . . . . . . . . . . . . . 119
Evolution of the flow in first segment during
steady state iterations. . . . . . . . . . . . . . . 123
xvii
xviii
List of Figures
Figure 16
Figure 17
Figure 18
Figure 19
Figure 20
Figure 21
Figure 22
Figure 23
Figure 24
Figure 25
Figure 26
Figure 27
Figure 28
Figure 29
Figure 30
Figure 31
Figure 32
Figure 33
Figure 34
Figure 35
Flow Q = αQd + (1 − α)Qp for stationary dynamic of conditioning test. . . . . . . . . . . . . 124
Distal pressure for stationary dynamic of conditioning test. . . . . . . . . . . . . . . . . . . . 124
Proximal pressure for stationary dynamic of
conditioning test. . . . . . . . . . . . . . . . . . 125
Representation of pressure interaction between
compartments for the new combined constitutive law. . . . . . . . . . . . . . . . . . . . . . . . 131
Test 1: Evolution of average added mass. . . . 134
Test 2: Evolution of the area in the nonlinear
swelling test for κs in {102 , 103 , 105 }. . . . . . . 135
Test 2: Evolution of the area in the nonlinear
swelling test for κs in {102 , 103 , 105 }. . . . . . . 136
Wall time for 0.001 s of simulation with κs = 102 .140
Wall time for 0.001 s of simulation with κs = 104 .141
Perfusion regions induced by Zygote coronaries.142
Diagram of interactions in the fully coupled
perfusion model. . . . . . . . . . . . . . . . . . 144
Output of the left ventricle displacement used
for the one-way coupling. (a) PV-loop and (b)
aortic pressure. Initial configuration considered
at the end of diastole, depicted with light blue
dot in (a). . . . . . . . . . . . . . . . . . . . . . . 145
Diagram of interactions in the one-way coupled perfusion model. . . . . . . . . . . . . . . 145
Evolution of average (a) pressure and (b) added
mass in both arteries and capillaries in the Bernoulli
perfusion test. . . . . . . . . . . . . . . . . . . . 147
Added mass evolution during third heartbeat
in the first compartment (arteries) of Bernoulli
coronaries test. . . . . . . . . . . . . . . . . . . . 148
Added mass evolution during third heartbeat
in the second compartment (capillaries) of Bernoulli
coronaries test. . . . . . . . . . . . . . . . . . . . 148
Total added mass evolution during third heartbeat of Bernoulli coronaries test. . . . . . . . . 148
Left coronary tree model reduction. Inlet and
outlet segments denoted with ’i’ and ’o’ respectively. . . . . . . . . . . . . . . . . . . . . . 151
Right coronary tree model reduction. Inlet and
outlet segments denoted with ’i’ and ’o’ respectively. . . . . . . . . . . . . . . . . . . . . . 152
Evolution of average (a) pressure and (b) added
mass in both arteries and capillaries in the network perfusion test. . . . . . . . . . . . . . . . . 152
Figure 36
Figure 37
Figure 38
Figure 39
Figure 40
Figure 41
Figure 42
Figure 43
Figure 44
Figure 45
Figure 46
Figure 47
Added mass evolution during third heartbeat
in the first compartment (arteries) of network
coronaries test. . . . . . . . . . . . . . . . . . . . 153
Added mass evolution during third heartbeat
in the second compartment (capillaries) of network coronaries test. . . . . . . . . . . . . . . . 153
Total added mass evolution during third heartbeat of network coronaries test. . . . . . . . . . 153
Blood flow in the right and left coronary arteries during a heartbeat. . . . . . . . . . . . . . . 154
Convergence in space for implicit monolithic
formulation. . . . . . . . . . . . . . . . . . . . . 166
Convergence in space for semi-implicit monolithic formulation. . . . . . . . . . . . . . . . . . 166
Convergence in space for implicit fixed point
formulation. . . . . . . . . . . . . . . . . . . . . 167
Convergence in space for semi-implicit fixed
point formulation. . . . . . . . . . . . . . . . . . 167
Convergence in time for implicit monolithic
formulation. . . . . . . . . . . . . . . . . . . . . 168
Convergence in time for semi-implicit monolithic formulation. . . . . . . . . . . . . . . . . . 168
Convergence in time for implicit fixed point
formulation. . . . . . . . . . . . . . . . . . . . . 169
Convergence in time for semi-implicit fixed point
formulation. . . . . . . . . . . . . . . . . . . . . 169
L I S T O F TA B L E S
Table 1
Table 2
Table 3
Table 4
Errors and convergence rates for problem (38)
with T = 1 and ∆t = 10−4 ; dofs stands for
degrees of freedom. . . . . . . . . . . . . . . . . 50
Errors convergence rates for problem (38) for
a fixed structured mesh with 70 elements per
side yielding 124 327 dofs. . . . . . . . . . . . . 52
Iteration count for Bratu’s problem solved with
a fixed point algorithm together with Anderson acceleration. . . . . . . . . . . . . . . . . . . 96
Undrained split sensitivity analysis: Average
iteration count for varying (a) Bulk modulus
(b) Permeability and (c) Porosity. Non-convergence
denoted with –. . . . . . . . . . . . . . . . . . . 97
xix
xx
List of Tables
Table 5
Table 6
Table 7
Table 8
Table 9
Table 10
Table 11
Table 12
Table 13
Table 14
Table 15
Table 16
Considered stabilizations in the context of diagonally stabilized splits. . . . . . . . . . . . . 98
P1 − P1 − P1 elements: Average iteration count
of the fixed-stress based solvers for a varying
κs in the swelling test. Non-convergence denoted by –. . . . . . . . . . . . . . . . . . . . . . 99
P1 − P1 − P1 elements: Average iteration count
of the fixed-stress based solvers for a varying
kf in the swelling test. Non-convergence denoted by –. . . . . . . . . . . . . . . . . . . . . . 99
P1 − P1 − P1 elements: Average iteration count
of the fixed-stress based solvers for a varying
ρs = ρf in the swelling test. Non-convergence
denoted by –. . . . . . . . . . . . . . . . . . . . 100
P1 − P1 − P1 elements: Average iteration count
of the fixed-stress based solvers for a varying
Kdr in the swelling test. Non-convergence denoted by –. . . . . . . . . . . . . . . . . . . . . . 100
P1 − P1 − P1 elements: Average iteration count
of the fixed-stress based solvers for different
accelerations in the swelling test. Non-convergence
denoted by –. . . . . . . . . . . . . . . . . . . . 101
P1 − P2 − P1 elements: Average iteration count
of the fixed-stress based solvers for a varying
κs in the swelling test. Non-convergence denoted by –. . . . . . . . . . . . . . . . . . . . . . 101
P1 − P2 − P1 elements: Average iteration count
of the fixed-stress based solvers for a varying
kf in the swelling test. Non-convergence denoted by – (more than 500 iterations in this case).102
P1 − P2 − P1 elements: Average iteration count
of the fixed-stress based solvers for different
accelerations in the swelling test for kf = 10−9 .
Non-convergence denoted by –. . . . . . . . . . 102
P1 − P2 − P1 elements: Average iteration count
of the fixed-stress based solvers for a varying
Kdr in the swelling test. Non-convergence denoted by –. . . . . . . . . . . . . . . . . . . . . . 103
3 way version of diagonal split with P1 − P2 −
P1 elements: Average iteration count for varying κs in the swelling test. Non-convergence
denoted by –. . . . . . . . . . . . . . . . . . . . 104
Three way version of diagonal stabilized split
with P1 − P2 − P1 elements: Average iteration
count for varying kf in the swelling test. Nonconvergence denoted by – after 500 iterations. 104
List of Tables
Table 17
Table 18
Table 19
Table 20
Table 21
Table 22
Table 23
Table 24
Table 25
Table 26
Table 27
Iteration count for all tested scenarios in the
swelling test. . . . . . . . . . . . . . . . . . . . . 105
Iteration count for all tested scenarios in the
footing test. . . . . . . . . . . . . . . . . . . . . 106
Iteration count for all tested scenarios in the
perfusion test. . . . . . . . . . . . . . . . . . . . 106
Wall time [s] of the different approaches for
increasing number of degrees of freedom. . . . 107
Average iteration count in 0.3 seconds of simulation with the displacement approximated by
first order elements. . . . . . . . . . . . . . . . . 112
Average iteration count in 0.3 seconds of simulation with the displacement approximated by
second order elements. . . . . . . . . . . . . . . 112
Parameters used for conditioning number test. 121
Conditioning number for the reduced NavierStokes models. . . . . . . . . . . . . . . . . . . . 122
Iteration required to achieve a stationary state
with and without acceleration for different values of αs , equal in all segments. . . . . . . . . 123
Parameters used for the proposed multi-compartment
constitutive law. . . . . . . . . . . . . . . . . . . 132
Modified vessel areas for Zygote coronaries. . 150
xxi
2
INTRODUCTION
2.1
context and state of the art
The human heart is one of the most important organs in the body,
if not the most. The reason is simple: Cells in our body require nutrients to survive which arrive through blood, and the heart is in
charge of pumping blood through the body [121]. Cardiovascular related diseases represent the leading cause of death worldwide, which
is one its main motors of research, where all new techniques must
pass through clinical trials to verify their effectiveness. This is a very
strong bottleneck in medicine, as techniques require a series of steps
(conceptual validation, animal testing and human testing) before being approved for their commercial use. This has put in recent years
mathematical models in the forefront of medical research, with concepts such as in silico trials [186] or digital twins [29] rapidly gaining
interest. In silico trials stand for the possibility of performing clinical
trials by means of computational models on virtual patients, which
can be useful for identifying patients with better response to treatments and thus reduce the required number of human trials for approval [112]. In fact, it has already been shown that in some scenarios
they can present higher accuracy than animal models [148]. Instead,
the concept of digital twin refers to the possibility of having a digital representation of a patient, on which different treatments can be
modeled to compare their outcomes [45]. Although both terms are
not the same, they are conceptually very similar and give a similar
message: Mathematical models are promoting significant changes in
medicine practice.
By using non-invasive measurements such as Magnetic Resonance
Imaging (MRI) to obtain patient-specific data, it is nowadays possible to reproduce realistic cardiovascular simulations which provide
useful tools in medical decision making [9, 77, 80, 113, 139, 144, 158]
(see [136] for a review). The main focus of cardiac modeling has been
historically in cardiac mechanics [8, 64, 82, 85, 87, 104, 140, 147, 170,
183] and electrophysiology [46, 137, 138, 142, 165, 166, 177], also more
recently in their coupling [9, 67, 73, 79, 115, 127, 161]. As models have
achieved certain maturity, other areas have been explored, such as the
interaction with blood in the chambers [68, 79, 154, 175], ECG computation [28, 153] and cardiac perfusion, which refers to the blood
supply of the heart tissue; it is the main topic of this manuscript. In
general, perfusion pertains the passage of fluid through the circula-
1
2
introduction
tory (or lymphatic) system to an organ or tissue, and is mainly used
to refer to the delivery of blood to the capillaries of the tissue.
For the sake of mathematical modeling, cardiac perfusion can be
thought as having two interacting components: One is the coronary
vessels, which carry blood from the aorta to the tissue and then to
the venous system; the other one is the tissue itself. Coronary vessels
can be modeled either in full 3D resolution [70, 108] or by means
of reduced models, which can be either lumped (0D) [71, 95, 114,
133] or network flow based (1D) [17, 101, 116, 132]. The main advantage of 1D models with respect to 0D is the ability to capture wave
phenomena, which are particularly important during contraction [88].
On the other hand, the modeling of the myocardium requires taking into account the presence of its microvasculature, which presents
large variations of vessel scales in very complex network structures
[94, 117, 122] and its interaction with the tissue. This has motivated
the use of poroelastic models, consisting in a formal averaging of
the fluid porous structure and the solid phase [192], which finally
yields a continuum model governed by both fluid and solid laws [65].
The advantage of considering these models is that they allow for the
modeling of highly heterogeneous and anisotropic fluid configurations, without the requirement of a deetailed geometric description of
the single vessels; this would be otherwise computationally unfeasible, and have already been explored to study the interaction between
contraction and blood flow in the myocardium [55, 60, 102, 171, 187,
188]. Of course, such averaging of the entire microvasculature can be
an over-simplification, as it would consider a unique material identifying arterioles, capillares, and venules. This has motivated the use
of multi-compartment formulations, in which different fluid resolution levels can be considered, again as coexisting phases in the heart.
These models are then coupled by adequate interaction terms [65],
and have already been applied to the study of cardiac perfusion [60,
70, 128].
Poromechanics more generally addresses the behavior of saturated
porous media and in particular the interaction of mechanical deformations and flow through porous materials. Since its origin in the
context of civil engineering [23–25, 178], it has been used for countless applications (see the review [66] and the references therein), and
is most commonly known as Biot’s consolidation model. More recently, these models have captured the attention of researchers interested in the behavior of highly deformable soft biological tissues
[81, 174, 195]; a prominent example of application in this area is the
perfusion of the heart [54, 55, 134]. As these models were originally
developed for civil applications, they were inadequate for biomechanics and especially for soft tissues undergoing large deformations [7,
10, 48, 196]. This called for more general formulations, arising from
the fundamental principles of continuum mechanics and thermody-
2.2 anatomy of the heart
namics. Thanks to their improved generality, such formulations are
more flexible and applicable to a broader range of scenarios [56, 65].
These models inherit desirable physical features, such as energy conservation [49], that are reflected into their mathematical properties.
However, the analysis of well-posedness, stability and approximation
of such new generation of poromechanics models is still largely open.
Although the numerical approximation of nonlinear poromechanics has not been adequately addressed yet, the numerical approximation of Biot’s equations is well understood. There are fundamentally
two approaches for its solution, referred to as fully-implicit and iterative coupling strategies [168]. The fully-implicit consists in solving
the fully coupled problem simultaneously, which provides the benefit
of unconditional stability but requires advanced and efficient ad-hoc
preconditioners [1, 92, 118, 151, 193]. Instead, the iterative coupling
approach involves the sequential-implicit solution of flow and mechanics, iterating the procedure until convergence at each time step.
In addition, it is equivalent to a preconditioned Richardson method
[53], so it also provides a basis to design efficient block preconditioners to be used for the fully-implicit approach [194]. The most
popular iterative schemes are the undrained splitting [197] and the
fixed-stress splitting schemes [168], both shown to be unconditionally
stable [37, 53, 129]. In particular, fixed-stress has been generalized to
an L-scheme [159], and this framework has been successfully applied
to the case of large deformations in [34]. The biggest downside of
these methods is that they need stabilization coefficients for convergence, which can only be obtained through problem-specific analysis.
To alleviate this, it has been shown in [38] that Anderson acceleration
[189] greatly relaxes the requirement of optimal stabilization.
2.2
anatomy of the heart
In this section we briefly present the relevant elements for the comprehension of cardiac perfusion, for which we closely follow the presentation in [90, 135, 179]. The heart is a muscular organ located in
the thoracic cavity and rests on the diaphragm, near to the midline
of the mediastinum. It is composed of three layers of tissue: i) Endocardium (thin layer of endothelium and connective tissue), ii) myocardium (cardiac muscle fibers) and iii) epicardium (visceral layer of
the serous pericardium). The fibrous pericardium and the serous pericardium compose the pericardium. The myocardium is composed of
three major types of cardiac muscle: i) Atrial muscle, ii) ventricular
muscle, and iii) specialized excitatory and conductive muscle fibers.
The first two work as a skeletal muscle, with a longer contraction duration, whereas the last one presents a weaker contraction due to the
lower number of contractile fibers. In spite of this, the latter present
an automatic rhythmical electrical discharge in the form of action
3
4
introduction
potentials or conduction of the action potentials through the heart,
providing an excitatory system that controls the rhythmical cardiac
beating.
The heart is understood as a two separate pumps, called right heart
and left heart. These pumps are composed of: The atria and ventricles,
which allow the entrance and ejection of the blood; the valves, which
prevent the backflow (atrioventricular valves (AV) (tricuspid and mitral), and semilunar valves (aortic and pulmonary)) and the blood
vessels (cava and pulmonar veins, aortic and pulmonary arteries), as
in Figure 1 (a). During its function, the left ventricle contracts on a
twisting mode. This happens because of its complex muscle fiber layers, which run in different directions: The subepicardial or outer layer
and the subendocardial or inner layer spiral. Both spiral in opposite
directions, which provokes a clockwise rotation of the apex of the
heart and counterclockwise rotation of the base of the left ventricle.
This causes a wringing motion of the left ventricle, pulling the base
downward toward the apex during systole (contraction). At the end
of systole, the left ventricle is similar to a loaded spring, which recoils
(or untwists) during diastole (relaxation) to allow blood to enter the
pumping chambers rapidly.
In assessing the contractile properties of muscle, it is important to
specify the degree of tension on the muscle when it begins to contract, called the preload, and to specify the load against which the
muscle exerts its contractile force, called the afterload. For cardiac
contraction, the preload is usually considered to be the end-diastolic
pressure when the ventricle has become filled, and the afterload is the
pressure in the aorta leading from the ventricle. The left heart allows
the blood to circulate through the body within the systemic circulation, while the right heart allows for its oxygenation at the lungs
through the pulmonary circulation. Both pumps are arranged in series, forming a closed circuit called the circulatory system, and are
separated by the interatrial and interventricular septa, which prevent
the oxygenated and deoxygenated blood from getting mixed.
A cardiac cicle refers to all the events produced from the beginning
of a heartbeat until the beginning of the next one, and can be divided
into four phases:
phase i: filling. This phase begins with a ventricular (inner)
volume of about 50 ml, known as end-systolic volume, and a diastolic
pressure of 2 to 3 mm Hg. As venous blood flows into the left ventricle
from the left atrium, it allows the ventricular volume to increase to
about 120 ml, called end-diastolic volume, and its pressure to about
5 to 7 mm Hg. This phase encompases approximately an 80% of the
blood flow through the atria into the ventricles.
2.2 anatomy of the heart
phase ii: isovolumic contraction. Immediately after ventricular contraction begins, the ventricular pressure rises abruptly, to
equal the pressure in the aorta (about 80 mm Hg) causing the AV
valves to close. Then, an additional 0.02 to 0.03 second is required
for the ventricle to build up sufficient pressure to push the semilunar valves open against the pressures in the aorta and pulmonary
artery. Therefore, during this period, contraction is occurring in the
ventricles, but no emptying occurs.
phase iii: period of ejection. Right after the isovolumic contraction, the ventricular pressures push the semilunar valves open
and blood is ejected out of the ventricles into the aorta and pulmonary
artery. Approximately 60% of the blood in the ventricles at the end of
diastole is ejected during systole; nearly 70% of it flows out during
the first third of the ejection period (rapid ejection), with the remaining 30% emptying during the next two thirds (slow ejection). The
entry of blood into the arteries causes their walls to stretch and the
pressure to increase to about 120 mm Hg. After the left ventricle stops
ejecting blood and the aortic valve closes, the elastic walls of the arteries maintain a high pressure in the arteries, even during diastole. The
aortic valve then closes, and pressure in the aorta decreases slowly
throughout diastole because the blood stored in the distended elastic
arteries flows continually through the peripheral vessels back to the
veins.
phase iv: isovolumic relaxation. At the end of systole, ventricular relaxation begins suddenly, allowing both the right and left
intraventricular pressures to decrease rapidly. For another 0.03 to 0.06
second, the ventricular muscle continues to relax, even though the
ventricular volume does not change, giving rise to the period of isovolumic relaxation. During this period, the intraventricular pressures
rapidly decrease back to their low diastolic levels.
Coronary anatomy
The myocardium has its own network of blood vessels, known as the
coronary circulation. The coronary arteries, shown in Figure 1 (b),
branch from the coronary ostia, located in the ascending aorta, and
encircle the heart. While the heart is contracting, little blood flows
in the coronary arteries because they are squeezed shut. When the
heart relaxes, however, the high pressure of blood in the aorta propels
blood through the coronary arteries, which are divided into the right
and left coronary arteries. From there it flows into the capillaries, and
then into coronary veins.
The left coronary artery (LCA) divides into the left anterior descending and circumflex branches. The left anterior descending (LAD)
artery supplies oxygenated blood to the walls of both ventricles, and
5
6
introduction
the circumflex branch distributes oxygenated blood to the walls of the
left ventricle and left atrium. The right coronary artery (RCA) supplies small branches (atrial branches) to the right atrium. It continues
below the right auricle and ultimately divides into the posterior interventricular and marginal branches. The posterior interventricular
supplies the walls of the two ventricles with oxygenated blood, and
the marginal branch delivers blood to the wall of the right ventricle.
Most of the coronary venous blood flow from the myocardium drains
into a large vascular sinus called the coronary sinus, which empties
into the right atrium.
Coronary blood flow
Myocardial cell contraction and relaxation are aerobic processes that
require oxygen. Determinants of myocardial oxygen demands include
preload, afterload, heart rate, contractility, and basal metabolic rate.
Systolic wall tension uses approximately 30% of myocardial oxygen
demand. Through the coronary arteries, the heart receives approximately 5% of the cardiac output when the body is at rest, which
amount to 250 mL/min. As there is minimal ability for the heart to
increase oxygen extraction, increased metabolic demands of the heart
are met primarily via increases in coronary blood flow. Coronary
blood flow is primarily controlled by changes in resistance in the
small arteries and arterioles in the tissue (microvasculature), which
play an important role in myocardial perfusion in general.
Flow in the left coronary artery has a greater diastolic predominance than the right coronary artery because the compressive forces
of the right ventricle are lower than those of the left ventricle. In
fact, at least 85% of coronary flow in the left anterior descending
artery occurs in diastole, whereas right coronary artery blood flow
is more or less equal in systole and diastole. Coronary blood flow is
primarily controlled by release of local metabolites such as adenosine
or nitric oxide, both vasodilators acting as control mechanisms during increased cardiac activity. Neural influences on coronary blood
flow are relatively minor, and work by means of nervous stimulation, both direct (throguh organic chemicals such as acethylcoline and
norepinephrine) and indirect (secondary responses to blood flow).
Metabolic factors, especially myocardial oxygen consumption, are the
major controllers of myocardial blood flow. Whenever the direct effects of nervous stimulation reduce coronary blood flow, the metabolic
control of coronary flow usually overrides the direct coronary nervous effects within seconds.
2.3
software and geometry
All simulations on this thesis are performed by means of the finite elements method [156]. For this, we consider two libraries: FEniCS [123],
2.3 software and geometry
(a) Sectional anatomy of the heart.
(b) Coronary circulation.
Figure 1: Anterior view of the heart. Images by Blausen Medical Communications, Inc. under Creative Commons license.
(a)
(b)
Figure 2: Wiggers diagram (a) in its classical representation [107] and (b)
with the coronaries in red [117].
7
8
introduction
and lifex (not yet published), which is based in deal.II [12]. The former is a Python library with a very straightforward interface, which is
ideal for prototyping. The latter instead is a C++ library, which gives
better control over the solution process, and is indeed what we use
for more demanding simulations. Another fundamental difference is
that FEniCS uses tetrahedral elements, whereas lifex uses hexahedra
1 . For this reason, 3D simulations in FEniCS are performed in the polate ellipsoid shown in Figure 3 (a), and instead in lifex we use the
realistic left ventricle (with epicardial coronaries) developed by the
Zygote company2 , shown in Figure 3 (b). The Zygote company has in
fact developed realistic 3D models of the entire human body, so that
the geometry we use is actually a subset of the available full-heart
geometry. Post-processing of 2D and 3D images is performed in Paraview [2], and instead for 1D we use the Python library Matplotlib
[99]. All of the codes developed for this work are freely available in
the following repositories:
monolithic poromechanics. FEniCS based library containing
the fully nonlinear poromechanics model developed by Chapelle
& Moireau [56], its linearized formulation [50] and the simplified multiscale model developed by Cookson et al. [60]. It was
used for all tests performed in Chapter 2, as well as the solver
comparison and convergence tests from Chapter 4. Available in:
https://bitbucket.org/nabarnaf/poromechanics/
iterative poromechanics. FEniCS based library containing iterative solvers for the linearized poromechanics problem [50].
It considers both undrained and diagonally stabilized splits developed in this thesis, with both Anderson and Aitken acceleration methods. It also considers the nonlinear poromechanics
problem considered in Chapters 2 and 3. Available in:
https://bitbucket.org/nabarnaf/poroelasticity iterative/
life x . Library for the simulation of the human heart developed within
the iHeart project, used for generating the electromechanics simulations considered in Chapter 4, as well as all perfusion tests
in the same chapter. To be released in:
https://lifex.gitlab.io/lifex/
2.4
poroelasticity
In this section we present the basis of poromechanics models, for
which we closely follow the presentation of [56]. Consider a reference domain Ω0 standing for the myocardium, which is deformed
1 This is a feature of the deal.II library.
2 Visit http://www.zygote.com.
2.4 poroelasticity
(a) Prolate geometry.
(b) Zygote geometry.
Figure 3: Left ventricle geometries used in this work.
Figure 4: Representation of porous media in poromechanics.
at time t into Ω(t). Note that the initial configuration and the reference domains may differ, Ω0 6= Ω(0). Deformation is given by a map
xt : Ω0 → Ω(t), and we use the standard notation that x = ys + X, so
that x is a coordinate in current configuration, and ys is the displacement. We also define the strain tensor F = ∇X ys , its determinant
∂y
J = det F and the velocity vs = ∂ts .
Poromechanics is a mixture theory [40, 41], which means that the
domain of interest sees coexistence of phases (see Figure 4). If we
consider only one fluid type and a solid phase, we can formally define
dΩt,fluid
a pointwise fluid volume fraction as φ = dΩ
named porosity, and
t
a solid one φs = 1 − φ referred to as solid volume fraction. Also, in
what follows we consider subscripts f and s to indicate fluid and solid
quantities.
One crucial ingredient to device the governing equations of poromechanics is to correctly differentiate with respect to each corresponding
phase. For this, consider a generic (vector or scalar) field us (x, t) associated with the solid phase, thus the material (total) derivative reads
dus
∂us
=
dt
∂t
+ ∇x (us )vs ,
x
9
10
introduction
dy
where vs = dts is the solid velocity.
Furthermore, us can be associated
R
to an extensive quantity U = ω(t) us dx for some subdomain ω(t) ⊂
Ω(t), whose material derivative reads
Z
Z
d
∂us
+ divx (us ⊗ vs ) dx.
us dx =
dt ω(t)
∂t x
ω(t)
We also introduce an analogous expression for material derivatives
with respect to the fluid, such that for a generic quantity uf we obtain
df uf
∂uf
=
dt
∂t
and
+ (∇ uf )vf
Z
Z
df
∂uf
uf dx =
dt ω(t)
∂t
ω(t)
x
+ divx (uf ⊗ vf ) ,
x
where vf stands for the fluid velocity. We define the relative velocity
vr = vf − vs and consider an integral quantity composed of solid and
fluid quantities, i.e.
Z
Z
U=
u dx =
(us + uf ) dx,
ω(t)
ω(t)
for which we define the total mixture derivative as
Z
Z
DU
d
df
=
us dx +
uf dx.
Dt
dt ω(t)
dt ω(t)
This yields the differentiation lemma.
Lemma 1 (Differentiation lemma [56]). For any sufficiently differentiable
quantity u = us + uf (scalar, vector or tensor), with uf associated to the
fluid particles and us to the solid ones, we have for all ω(t) ⊂ Ω(t)
Z
∂u
DU
=
+ divx (u ⊗ vs ) + divx (uf ⊗ vr ) dx.
Dt
∂t x
ω(t)
Defining the reference tensors U = Ju and Vr = JF −1 vr , we obtain the
expression in reference configuration:
Z ∂U
DU
=
+ divX (uf ⊗ Vr ) .
Dt
∂t X
ω0
Mass conservation
We consider a distributed mass source term θ associated to the fluid
phase, and define the fluid, solid and total densities as ρf , ρs and
ρ = φs ρs + φρf
respectively. The conservation of mass in an arbitrary region ω(t) ⊂
Ω(t) for the fluid reads
Z
Z
D
ρf φ dx =
θ dx,
Dt ω(t)
ω(t)
2.4 poroelasticity
which together with Lemma 1, where us = 0, yields
∂(ρf φ)
+ divx (ρf φvf ) = θ
∂t
in Ω(t).
(1)
If we instead consider the total density ρ, we would obtain
∂ρ
+ divx (ρvs + ρf φvr )
∂t
in
Ω(t),
and from their difference we get the conservation law for the skeleton:
∂(ρs φs )
+ divx (ρs vs + ρf vf )
∂t
in Ω(t).
Note that using instead Lemma 1 for the solid density in reference
configuration we get, using in such case uf = 0:
∂(Jρs )
=0
∂t
in Ω(t),
meaning that the reference density ρs,0 = Jρs is conserved, as it
would be expected.
To formulate mass conservation in the reference configuration, we
define the reference density of added mass m in Ω0 as
m = Jρ − ρ0 ,
equivalently defined as follows in virtue of the solid mass conservation:
m = ρf Jφ − ρf,0 φ0 .
Again, the differentiation Lemma now using U = ρf + m gives
dm
+ divX (W) = Θ
dt
in
Ω0 ,
(2)
where we set Θ = Jθ and define the flow vector W = ρf φVr .
Conservation of momentum
We now define the corresponding acceleration terms. For the solid,
this reads
dvs
∂vs
as =
=
+ (∇x vs )vs ,
dt X
∂t x
whereas the fluid uses the material derivative with respect to the fluid
particles, thus it is given by
af =
df vf
∂v
= f
dt
∂t
+ (∇x vf )vf .
x
Using these definitions, the total acceleration can be defined using
the total density as
ρa = ρs φs as + ρf φaf .
11
12
introduction
The conservation of momentum takes into account four components:
The total inertia, the source term through θvf , body forces f and surface traction t, which all together is given by
D
Dt
Z
Z
ω(t)
(ρs φs vs + ρf φvf ) dx =
ω(t)
Z
θvf dx +
Z
t ds.
ρf dx +
ω(t)
∂ω(t)
Using Lemma 1, mass conservation and the existence of the Cauchy
tensor σn = t we obtain the well-known equations for the mixture
case
ρa − divx σ = ρf
in
Ω(t).
Using the Piola stress tensor P = JσF −T , the same equations can be
written in reference configuration:
(ρ0 + m)a − divX P = (ρ0 + m)f
in
Ω0 .
(3)
Constitutive modeling
We consider an isothermal porous mixture, so we neglect temperature throughout the entire manuscript. Constitutive modeling rests
on devising an adequate Helmholtz free energy Ψ = Ψ(F , m) and
Gibbs free energy gm = gm (p), which depends on the pressure p.
The Gibbs free energy satisfies the state equation (see [65])
∂gm
1
= ,
∂p
ρf
and for our purposes it suffices to consider gm = ρ−1
f,0 (p − p0 ) for
some resting pressure p0 , which yields the incompressibility of the
fluid, i.e ρf = ρf,0 . In addition, both potentials are related through
∂Ψ
= gm ,
∂m
so that the entire modeling of the problem is given by the Helmholtz
free energy. In virtue of solid mass conservation, the potential can be
also written as Ψ = Ψ(F , ϕ), where ϕ := Jφ is the reference (or Lagrangian) porosity. This name can be seen from the following simple
identity:
Z
Z
φ dx =
ω(t)
Jφ dX.
ω0
The main tool for constructing such potentials is the second law of
Thermodynamics, which yields the celebrated Clausius-Duhem inequality [89]. Its consequences are fundamental for devising thermodynamic potentials, and can be summarized as [56]:
• The Piola stress tensor is the sum of three contributions:
P = φPvis +
∂Ψ ∂Ψdamp
+
,
∂F
∂Ḟ
2.4 poroelasticity
where Pvis represents the stress associated to fluid viscosity, and
Ψdamp represents viscous effects of the solid. For the rest of the
work, we ignore such term, and thus set Ψdamp = 0.
• The fluid stress tensor satisfies the dissipation inequality
σvis : ε(vf ) > 0,
where ε(v) = sym (∇ v). We consider in what follows σf (vf ) =
2µf ε(vf ), which of course satisfies the dissipation inequality.
• There exists a positive definite second order tensor Kf such that
W
1 T
T
= Kf − ∇X p + ρf F (f − af ) + F divX (φPvis ) .
ρf
φ
We highlight that this is a generalized Darcy law, which incorporates the fluid intertia, body forces and the Brinkman term.
The tensor Kf and its representation in current configuration
kf , related through kf = J−1 F Kf F T , are known as the reference
and current permeability tensors respectively.
2.4.1
Governing equations
We are now in position to present the system of equations to be solved
by putting together the fundamental balance laws:
(ρ0 + m)a − divX P = (ρ0 + m)f
in
Ω0 ,
(4a)
ρf af + (ρf kf )
−1
w + ∇x p − φ
−1
divx σvis = ρf f
dm
+ divX W = Θ
dt
in
in
Ω(t),
(4b)
Ω0 ,
(4c)
where W = JF−1 w. For computational purposes, it is convenient to
slightly modify these equations in order to remove the contribution
of the reference viscous stress Pvis from the solid momentum. For
this, we write the momentum equation in reference configuration and
subtract it from the fluid momentum to obtain the following:
−1 ∂Ψ T
ρs φs as − divx J
F + φpI + p ∇x φ − φ2 kf−1 (vf − vs ) = ρs φs f.
∂F
As observed in [56], the Helmholtz free energy should depend on the
reference solid porosity Js = Jφs = J(1 − φ), so that the potential can
be written as
Ψ(F , Jφ) = Ψs (F , Js ),
which yields
∂Ψ
∂Ψs ∂Ψs −T
=
+
JF .
∂F
∂F
∂Js
13
14
introduction
∂Ψ
Note finally that by definition we have p = − ∂J
, so putting this in
s
the previous equation yields
∂Ψs T
ρs φs as − divx J−1
F − (1 − φ)pI
∂F
+ p ∇x φ − φ2 kf−1 (vf − vs ) = ρs φs f.
Taking again the pressure outside of the divergence, we get the following:
−1 ∂Ψs T
ρs φs as − divx J
F
+ (1 − φ) ∇x p − φ2 kf−1 (vf − vs ) = ρs φs f,
∂F
which in reference configuration is now a suitable form for numerical
implementation:
ρs,0 φs,0 as − divX Ps + (1 − φ)F −T ∇X p − φ2 kf−1 (vf − vs ) = ρs,0 φs,0 f,
where we used Ps =
2.4.1.1
∂Ψs
∂F .
A (slightly) simplified model
In [60] the authors consider a simplified model which allows to reduce the relative velocity vs − vf , similarly to the reduction from
Darcy to Poisson models. For this, consider Equation (4b) in reference configuration without the inertia, external forces and dissipation
to obtain the simple relation
W = −ρf JF −1 kf F −T ∇X p.
(5)
Plugging this in (4c) gives
dm
− ρf divX JF −1 kf F −T ∇X p = Θ,
dt
and then ignoring the inertia, permeability and the coefficient (1 −
φ)F −T in the mechanics we obtain the simplified model presented in
[60]:
dm
− ρf divX
dt
− divX P = ρs,0 φs,0 f
JF −1 kf F −T ∇X p = Jθ
in
Ω0 ,
(6a)
in
Ω0 ,
(6b)
where we use the effective Piola stress tensor P = ∂Ψ
∂F . Note that we
decided to keep in the presentation kf and θ instead of their reference configuration counterparts. The reason behind this is that parameters are intrinsically defined in current configuration, whereas
the reference configuration can be seen as an abstract construction.
This means that parameters in reference configuration are actually a
physically accurate representation of the current configuration ones.
We close this section with one minor but important aspect: at this
point it might not be clear what the problem variables are, for which
we focus in (6). The variables are four:
2.5 our contributions
15
1. The added mass m.
2. The displacement ys .
3. The pressure p.
4. The Piola stress tensor P .
The last two, as previously discussed, are related to the added mass
and displacement through constitutive models as P = ∂Ψ
∂F and p =
∂Ψ
,
which
leaves
the
problem
depending
on
only
two
variables,
m
∂Jφ
and ys . One last observation to be made is that the added mass can be
replaced with the reference porosity ϕ := Jφ. We assign it a specific
name as it is the natural variable in this problem. Indeed, pressure is
∂Ψ
given by p = ∂ϕ
, and using the reference porosity we can rewrite the
mass conservation as
dϕ
J
− divX JF −1 kf F −T ∇X p = θ
dt
ρf
2.5
in
Ω0 .
our contributions
This work deals with the numerical approximation of poroelasticity
for cardiac perfusion and is divided in three chapters. In Chapter
2, we perform the well-posedness and numerical analysis of a linearized poromechanics model. We follow in particular the works by
Chapelle and co-workers [49, 50, 56], where they introduced a general
thermodynamically consistent poromechanics model. In the original
formulation [56], the authors develop their model for the general case
of large deformations. Such model is extremely challenging from the
mathematical analysis standpoint, because it presents nonlinearities
on both the constitutive equations and the geometry due to large deformations. For these reasons, we focus on the linearization of the
previous model, proposed by the same authors in [49, 50] and derived under the assumption of small deformations. In this setting, the
porosity (fluid volume fraction) is a fixed parameter of the model.
When the fluid phase is strictly incompressible and the solid phase
is nearly-incompressible, the model exhibits an interesting saddlepoint structure where a linear combination of the velocities of the
fluid and solid phases determine the fulfillment of the quasi-incompressibility
constraint. The weights of the linear combination of velocities depend
on the porosity of the material. We show the well-posedness of the
problem in the sense of Hadamard [91] through a Faedo-Galerkin
argument [72], where the continuous problem is discretized using
conforming finite elements spaces and the discrete problem is analyzed using the theory of Differential Algebraic equations [52], which
highlights the saddle point structure of the problem. The works [49,
50] looked at the problem as it was formed by coupled equations of
16
introduction
parabolic type, which somehow put the role of the incompressibility constraint in the background. Here, we change this perspective
towards a hybrid system of parabolic and hyperbolic partial differential problems. This new approach allows us to put into evidence the
saddle-point nature of the problem and the role of the weighted infsup condition between fluid velocity, solid displacement and pressure
to determine the stability of the approximation scheme.
More precisely, after discretizing the problem by means of finite
differences in time and finite elements in space, we address the numerical stability of a numerical scheme based on the family of TaylorHood finite elements [176] for the approximation of fluid velocity,
solid displacement and pressure; both fluid velocity and solid displacement are required to have a degree of approximation higher than
that of the pressure. Our analysis confirms that the inf-sup stability
of the scheme depends on the porosity and provides guidelines to
choose the polynomial order used for the approximation of the velocity and displacement in different scenarios obtained by varying this
parameter. We notice that such analysis may be particularly relevant
also for the fully nonlinear version of the model, where the porosity
is a variable of the system. We published these results in [14].
In Chapter 3 we develop iterative schemes for the linearized model
studied in the first part and present some preliminary extensions to
the nonlinear case. The schemes we propose are based on the splitting schemes developed for Biot’s equation [26, 27] by means of a
decoupling of the fluid and solid phases, which heavily depends on
the saddle point structure of the problem. The first splitting scheme
proposed is an adapted form of the undrained split, which is formulated and analyzed by posing the time-discretized problem as a generalized gradient flow [35, 39]. One major drawback of this scheme is
the sensitivity with respect to quasi-incompressibility, which we show
theoretically and then verify numerically as well. The other scheme
we study is a diagonally L2 stabilized scheme, which can be seen as a
generalization of the classic fixed-stress scheme [168]. This scheme
can be analyzed by means of the novel concept of relative stability, which implies the r-linear convergence [152] of subsequence and
yields the interesting property of allowing for negative stabilization
factors (or destabilization). Indeed, we show numerical evidence that
supports destabilization as an important contribution to efficiency.
The diagonally L2 stabilized scheme is very robust with respect to the
bulk modulus, but presents difficulties achieving convergence whenever the reaction part of the diagonal block is dominant. Finally, we
use a Schur complement formalism to devise a three-way splitting
scheme based on the diagonal splitting which resembles the CahouetChabard preconditioner [51]. We end this chapter with a nonlinear
model in which we test all the proposed schemes and thus shed light
on quasi-Newton schemes for nonlinear poromechanics.
2.5 our contributions
One major limitation of these schemes is that they require stabilization parameters. Even if optimal ones are computed through analysis,
they are not guaranteed to give optimal performance. This becomes
even more difficult in the fully nonlinear case, where analysis is not
available and thus the parameters need to be computed numerically.
This can potentially present serious deterioration in convergence, hindering the robustness of the schemes. As in [38], we show that Anderson acceleration is able to relax the requirement of sharp estimates
of the stabilization parameters, which renders our schemes robust in
practice. In addition, some non-convergent scenarios become convergent when sufficient depth is used for the acceleration.
In Chapter 4 we address the fully nonlinear multi-compartment
poroelasticity model [60] coupled with coronary circulation. Blood
flow in the coronaries can be modeled with a lumped Navier-Stokes
model [74, 133, 143, 155, 190], which can be justified by the small
diameter of the coronary vessels [149]. Regarding cardiac perfusion,
lumped models have been used to study fluid dynamics of the coronary vessels [108, 109] and more recently to generate a network of
vessels, and then coupled with a poromechanics model [133]. These
lumped models require ad-hoc approximations to obtain a closed system, which depend on the boundary conditions under consideration.
To circumvent this limitation, we extended them in a way that allows
arbitrary combinations of boundary conditions on the vessels, which
can be of both Dirichlet and Neumann type. This problem presents severe ill-conditioning, so we study numerical strategies to adequately
handle its numerical approximation. Both the left ventricle and epicardial coronary vessels geometries are obtained from the realistic Zygote geometry, where we adapted the original geometry areas in the
lumped model to obtain physiological results. We expect this effect
to be minimized when using real coronary vessels, although given
the sensitivity of reduced models to the vessel area, additional adjustments might still be required.
The myocardium is modeled with two compartments: One compartment for the arterioles and another one for the capillaries. The
veins are considered as a homogeneous sink term [55, 128]. For the
constitutive modeling of the myocardium we propose a novel decomposition of the Helmholtz potential which combines previous
approaches [56, 60] and extends them to the multi-compartment scenario. This new potential, apart from including the classical energy
term which yields the Piola stress tensor, includes a barrier function
which imposes the fluid volume fraction to be between 0 and 1. The
governing equations are given by nonlinear mechanics [65, 97] and
the porous media equation [184], and by looking at their regularity
requirements for existence of solutions we obtain simple convexity
conditions under which the separate physics guarantee existence of
solutions. We also study the numerical approximation of the porome-
17
18
introduction
chanics problem by comparing monolithic and iterative strategies, for
which we show numerical evidence of convergence and then study
the wall-time of the different schemes.
The coupling of the myocardium with the coronary vessels is done
through pressure continuity, where spatial information of the reduced
vessels is maintained through the use of perfusion regions [30], so
that each vessel perfuses a corresponding portion of the domain.
Then, the outflow of each vessel irrigates the tissue through a source
term in the mass balance. To take advantage of the existing electromechanics models, we propose a one-way coupling strategy, in which
the mechanics are decoupled from the perfusion, and thus are considered as a pre-processing stage. The resulting mass conservation
system is coupled with the coronary circulation through a fixed point
algorithm [60, 70, 119]. The model is able to reproduce physiological conditions and thus, combined with the use of electromechanics
as a pre-processing stage, presents a powerful tool for the efficient
creation of in-silico models. We have indeed obtained such results
by using the displacement of the heart as data, which dramatically
reduces the computational time required to run these simulations.
2.6
fundamental notions, definitions and notation
In this section we briefly define all relevant spaces and objects that
will appear in this thesis, and they can be found in any Functional
Analysis textbook, such as [43]. The fundamental concepts are those
of a Banach and a Hilbert space. A Banach space is simply a complete vector space, whereas the Hilbert space is a pair consisting in
a complete vector space with an inner product (H, (·, ·)H ). The inner product is a bilinear symmetric positive definite operator, which
means that it satisfies the following three properties:
1. (x, y)H = (y, x)H for all x, y in H.
2. (ax1 + bx2 , y)H = a(x1 , y)H + b(x2 , y)H for all x, y in H and a, b
in R.
3. (x, x)H > 0 for all x 6= 0.
In particular, the inner product defines the norm kxk2 := (x, x) and
these properties imply the celebrated Cauchy-Schwartz inequality
(x, y)H 6 kxkH kykH
∀x, y ∈ H.
Another important property is that Hilbert spaces are reflexive because there exists an isometry between them and their dual. It is
called the Riesz isometry, and is given by the mapping T : H → H 0
defined as
hT x, yiH 0 ×H = (x, y)H ,
2.6 fundamental notions, definitions and notation
where h·, ·iH 0 ×H represents the duality pairing between a space and
its dual. Arguably the most known Banach spaces are Lebesgue spaces,
which are composed of measurable functions f : Ω → R such that, for
p > 1,
Z
kfkp
Lp (Ω) :=
|f|p < ∞,
Ω
and complete with respect to k · kLp (Ω) . They satisfy the Hölder inequality: Consider two functions f ∈ Lp (Ω) and g ∈ Lq (Ω) such that
1/p + 1/q = 1, then
kfgkL1 (Ω) 6 kfkLp (Ω) kgkLq (Ω)
∀f ∈ Lp (Ω), g ∈ Lq (Ω).
In particular, L2 (Ω)
R is a Hilbert space with respect to the inner product hf, giL2 (Ω) = Ω fg dx.
Using the space C∞
0 (Ω) of infinitely differentiable functions with
compact support in Ω, we can define the notion of a weak derivative
0
as follows: The weak derivative of a distribution T ∈ (C∞
0 (I)) is the
0
∞
0
object T ∈ (C0 (I)) such that
∞
∞
0
0
hT 0 , fi(C∞
= −hT , f 0 i(C∞
0 (I)) ×C0 (I)
0 (I)) ×C0 (I)
∀f ∈ C∞
0 (I).
Now we can define the Sobolev spaces W r,p (Ω), which are Banach
spaces defined as
W r,p (Ω) := {f ∈ Lp (Ω) : Dα f ∈ Lp (Ω),
|α| 6 r},
where Dα stands for the weak derivative of order |α|, with α a multiindex.
Last but not least, we require the definition of Bochner spaces,
which are still Banach spaces representing time dependence. For them,
all concepts defined so far can be naturally extended to hold, such as
weak differentiation and norms. We thus define the Bochner spaces
Lp (0, T ; X), 1 6 p < ∞, and L∞ (0, T ; X) for any Banach space X
as the spaces where the function x : (0, T ) → X has finite norms
R
1/q
T
q
kx(s)k
ds
and sups∈(0,T ) kx(s)kX respectively. Weak time
X
0
derivatives are considered in
p
W k,p (0, T ; X) = {x ∈ Lp (0, T ; X) : ∂n
t x ∈ L (0, T ; X) ∀n ∈ N, n 6 k} ,
for 1 6 p 6 ∞. One important property is that the time integral of
a function f : (0, T ) → W r,p (Ω) is well defined, still yields a function
in W r,p (Ω) and commutes with linear bounded operators, so if T :
W r1 ,p1 (Ω) → W r2 ,p2 (Ω) then
Zs
Zs
T f(s) ds = T f(s) ds ∀f(s) ∈ L1 (W r1 ,p1 (Ω)).
0
0
This in particular means that we can freely change the order of integration. More details about Bochner spaces can be found in [100,
103].
19
20
introduction
We consider the normalized space L20 (Ω) := {q ∈ L2 (Ω) : (q, 1)L2 =
0}, and boundary conditions can be considered in a subset of the domain Γ ⊆ ∂Ω, with which we define the trace operator γD : H1 (Ω) →
H1/2 (Γ ) given by γD (η) = η|Γ . If Γ ≡ ∂Ω, we have
H10 (Ω) := {η ∈ H1 (Ω) : γD (η) = 0}
which is equivalently defined as the closure of smooth functions with
compact support with the H1 norm:
H10 (Ω) := C∞
0 (Ω)
k·kH1 (Ω)
.
For a positive function ψ, we consider the weighted
Sobolev spaces
R 2
2
2
L (Ω, ψ dx) with norm kfkψ = (f, f)ψ = Ω f ψ dx. Also, we use
the convention of denoting scalars, vectors, tensors and matrices as
a, a, A and A, respectively [130], and all derivatives will be posed in
reference configuration, so ∇ = ∇X unless specified otherwise. Also,
∂
we use the notation ∂t := ∂t
. Let V, W be normed vector spaces, and
U ⊂ V be an open subset of V. A function f : U → W is called Fréchet
differentiable at x ∈ U if there exists a bounded linear operator ∂x f :
V → W such that
kf(x + h) − f(x) − ∂x f[h]kW
= 0.
khkV
khkV →0
lim
All Fréchét differentiable functions are also also Gâteaux differentiable, and both derivatives coincide, but the converse is in general
false. The Gâteaux derivative Df : V → W is given by
f(x + th) − f(x)
.
t→0
t
Df[h] = lim
More details in [6]. Finally, throughout the manuscript we drop the 0
subindex from the reference domain Ω0 and refer to Ω ⊂ R3 instead
unless explicitly stated otherwise.
3
LINEARIZED POROMECHANICS
In this chapter we propose an analysis of a linearized model that
has been previously proposed in [50], which comes from a linearization procedure applied to (4) under the assumption of small displacements. We consider the mathematical analysis and the numerical approximation of the problem. More precisely, we carry out firstly the
well-posedness analysis of the model. Then, we propose a numerical
discretization scheme based on finite differences in time and finite
elements for the spatial approximation; stability and numerical error
estimates are proved. Particular attention is dedicated to the study
of the saddle-point structure of the problem, where velocities of the
fluid phase and of the solid phase are combined into a single quasiincompressibility constraint. Our analysis provides guidelines to select the componentwise polynomial degree of approximation of fluid
velocity, solid displacement and pressure, to obtain a stable and robust discretization based on Taylor-Hood type finite element spaces.
The analysis reveals two interesting aspects: The first one is that the
choice of the finite element spaces depends on the porosity φ of the
mixture, and the second one is that this choice is not symmetric. Indeed, choosing appropriate norms to compute the inf-sup constant
arising from the saddle point structure of the problem we expose that
the contribution to inf-sup stability of the displacement space is negligible. This chapter is structured as follows: In Section 3.1 we present
the linearized model and its derivation through small displacements,
in Section 3.2 we present the analysis of the space-discrete linearized
problem, in Section 3.3 we present the analysis of the fully-continuous
problem, in Section 3.4 we present the error analysis of a fully-discrete
problem, in Section 3.5 we present the analysis of the inf-sup condition and in Section 3.6 we present numerical tests to validate our
theory. Most of this work has been published in [14].
3.1
the linearized poromechanics model
We formulate (4) on the following abstract form: Find the velocity of
the solid phase vs , the velocity of the fluid phase vf and the added
mass (per unit volume) m, such that
S(vs , vf , m) = 0;
F(vs , vf , m) = 0;
M(vs , vf , m) = 0;
where the operators S(·), F(·), M(·) correspond to the momentum
conservation in the solid and fluid phases and mass balance respectively. More precisely, referring to the strong formulation of the model
21
22
linearized poromechanics
presented in [50], the operators S(·), F(·), M(·) correspond to the following subproblems:
Given vf , m in Ω0 , find vs in Ω0 such that
∂vs
− ∇X · Ps
∂t
+ (1 − φ)JF −T ∇X p − Jφ2 k−1
f (vf − vs ) − ρs (1 − φ0 )f = 0
S(vs , vf , m) = ρs (1 − φ0 )
complemented by the following constitutive laws
Ps =
∂Ψ(F, Js )
,
∂F
p=
∂Ψ(F, Js )
.
∂Js
Given vs , m in Ω(t), find vf in Ω(t) such that
1 d
(ρf Jφvf ) + divx (ρf φvf ⊗ ρf (vf − vs ))
J dt
− divx (φσf ) + φ∇x p + φ2 k−1
f (vf − vs ) − ρf φf = 0.
F(vs , vf , m) =
Given vs , vf in Ω(t) find m in Ω(t) such that
M(vs , vf , m) =
1 dm
+ divx (ρf φ(vf − vs )) = 0 .
J dt
The problem must be complemented by boundary and initial conditions. For the boundary constraints many options are possible, as
discussed for example in [50]. For the sake of simplicity, we present
here only one of the possible variants. Let us split the whole boundary ∂Ωt into two distinct non intersecting parts, ΓD and ΓN , where
we enforce Dirichlet and Neumann type conditions, respectively. Let
D
vD
s , vf , t, be assigned velocities and traction for boundary conditions
and let v0s , v0f be the assigned initial values, under the assumption that
Ω(t) = Ω0 at t = 0. We define the boundary and initial conditions as
follows,
vs = vD
s
s
on ΓD
× (0, T ),
vf = vD
f
f
on ΓD
× (0, T ),
(Ps − (1 − φ0 )pI)n0 = t0
φ(σf − pI)n = t
f
on ΓN
× (0, T ),
vs = v0s
in Ω0 × {0},
v0f
in Ω0 × {0},
vf =
m=0
3.1.1
s
× (0, T ),
on ΓN
in Ω0 × {0}.
Newton solver and the tangent model
Using the previous abstract formulation of the problem, we formally
devise the Newton method for the solution of the equations. We note
3.1 the linearized poromechanics model
that this linearization is instrumental for the following developments,
and is performed with respect to both time and space operators. To
this purpose, we denote by Du A the derivative of the operator A
with respect to the field u. We point out that such derivative should
account for the classical Fréchét derivative of the operator, combined
with the time derivatives and the shape derivatives due to deformations of the domain. The central hypothesis in the definition of the
tangent problem is that we neglect the shape derivatives, limiting ourselves to account for the Fréchét ones. In other words, we identify the
physical domain, Ω(t), with the reference one, Ω0 (and for simplicity
we drop the subindexes 0, t, denoting both by Ω). In this setting, we
address the following quasi-Newton method for the solution of the
nonlinear problem:
1. Given vs , vf , m, such that the boundary and initial conditions of
the nonlinear problem are satisfied, calculate δvs , δvf , δm solution of the following system of linear equations,
D S Dvf S Dm S
δv
S(vs , vf , m)
vs
s
D F D F D F δv = − F(v , v , m)
v
s
v
m
f
f
s
f
Dvs M Dvf M Dm M
M(vs , vf , m)
δm
where Dvs S etc. represent Fréchét derivatives in the point vs , vf , m,
and the system must be solved using boundary and initial conditions of the same type of the nonlinear problem, but with
homogeneous (null) data;
e = vs , vf , m + δvs , δvf , δm;
2. Calculate ves , vef , m
3. Stop the algorithm if the following test is satisfied, for a given
tolerance ,
e F(ves , vef , m),
e M(ves , vef , m)k
e 6 ;
kS(ves , vef , m),
e and continue.
4. Otherwise set vs , vf , m ← ves , vef , m
In [50] an approximate yet explicit expression of the tangent problem is provided. More precisely, the nonlinear problem is linearized
around the configuration at rest, namely vs , vf , m = 0. As a result we
have m = 0 and φ = φ0 6= 0. As in [50], we denote by vs , vf , m the
increments with respect to such state and use an additive decomposition of the free energy, with a Saint-Venant Kirchhoff component for
the mechanics and a quadratic potential for the volumetric deformation of the solid phase Js , which reads
λ
κs
Ψ(F, Js ) = (tr E)2 + µE : E +
2
2
Js
−1
1 − φ0
2
,
23
24
linearized poromechanics
where E = FT + F + FT F, also µ, λ are the Lamé constants and κs is
the bulk modulus. Under small deformations we have thath E ≈ ε(ys )
and J ≈ 1 + div ys , which give
∂Ψ
≈ σs (ys ) = CHooke ε(ys ) = λs tr ε(ys ) + 2µs ε(ys ),
∂F
κs
m
∂Ψ
≈
p=
− div ys ,
∂Js
(1 − φ0 )2 ρf
Ps =
where C is a fourth order constant tensor (symmetric, positive definite), known as Hooke tensor. In the linearized setting it is possible
to reformulate the problem in terms of the (more commonly used)
variable p instead of the added mass. As a result, the approximate
tangent problem for the configuration at rest reads as follows: Find
ys , vf , p such that the following system of equations holds in Ω:
ρs (1 − φ)∂tt ys − div σs (ys ) + (1 − φ) ∇ p
−φ2 k−1
f (vf
(7a)
− ∂t ys ) = ρs (1 − φ)f,
(7b)
ρf φ∂t vf − div (φσf (vf )) + φ ∇ p + φ2 k−1
f (vf − ∂t ys ) = ρf φf,
(7c)
ρf (1 − φ)2
∂t p + div (ρf φvf ) + div (ρf (1 − φ) ∂t ys ) = 0.
κs
(7d)
The system (7) is closed with appropriate boundary conditions naturally following from the ones of the nonlinear problem. For the sake
of clarity we report them here
ys = ys D
s
on ΓD
× (0, T ),
(8)
vf = vD
f
on ΓD
× (0, T ),
(9)
on
(CHooke ε(ys ) − (1 − φ)pI) n = t
on
φ (σf (vf ) − pI) n = t
s
ΓN
f
ΓN
× (0, T ),
(10)
× (0, T ),
(11)
in Ω × {0},
(12)
∂t ys = v0s
in Ω × {0},
(13)
v0f
0
in Ω × {0},
(14)
in Ω × {0}.
(15)
ys = ys
vf =
0
p=p ,
For simplicity, we restrict the following analysis to Dirichlet boundary conditions:
vf = vD
and
ys = yD
on ∂Ω,
for given vD , yD in H1/2 (∂Ω). We have left aside the natural no-slip
condition vf = vs on the boundary. A simple weak imposition of this
condition was analyzed for a monolithic solver in [50], so there is no
3.1 the linearized poromechanics model
25
loss of generality in our choice. We also consider the problem with
homogeneous Dirichlet conditions to avoid using additional lifting
terms.
Remark. Biot’s model [24] is given by:
− div CHooke ε(ys ) + α ∇ p = fs ,
Kf−1 w + ∇ p = ff ,
p
∂t
+ α div ys + div w = θ,
M
(16)
where α is the Biot coefficient and M is the Biot modulus. The main differences between this model and (7), rely on the presence of the permeability in
the fluid and solid momentum equations and the symmetric way in which
fluid and solid velocities behave; the latter means that fluid quantities are
multiplied by the fluid fraction φ whereas solid quantities are multiplied by
the solid fraction 1 − φ. These features will be evident during the analysis,
as they yield a positive definite formulation of the semi-discrete, continuous
in time problem in the framework of Differential Algebraic Equations.
3.1.2
Variational formulation
The weak formulation of problem (7) reads: Find (ys , vs , vf , p) in L2 (0, T ; H10 (Ω)) ×
L2 (0, T ; L2 (Ω)) × L2 (0, T ; H10 (Ω)) × L2 (0, T ; L20 (Ω)):
(ρf φ∂t vf , v∗f ) + 2µf (φε(vf ), ε(v∗f ))
∗
∗
−(p, div(φv∗f )) + (φ2 κ−1
f vf , vf ) − (θvf , vf )
∗
∗
−(p, div(φv∗f )) − (φ2 ˇ−1
f vs , vf ) = (ρf φf, vf ),
(1 − φ)2
∂t p, q + (q, div(φvf )) + (q, div((1 − φ)vs ) = (ρ−1
f θ, q),
κs
(ρs (1 − φ)∂t vs , ws ) + (CHooke ε(ys ), ε(ws )) + (φ2 κ−1
f vs , ws )
−(p, div((1 − φ)ws )) − (φ2 κ−1
f vf , ws ) = (ρs (1 − φ)f, ws ),
(∂t ys , v∗s ) − (vs , v∗s ) = 0,
(17)
for every test function (ws , v∗s , v∗f , q) in H10 (Ω) × L2 (Ω) × H10 (Ω) ×
L20 (Ω), with initial conditions vf (0) = ξf , p(0) = ξp , ys (0) = ξs , vs (0) =
ξv . By defining σf (vf ) = 2µf ε(vf ), σs (ys ) = CHooke ε(ys ) and the following Riesz operators:
Af : H10 (Ω) → (H10 (Ω)) 0
hAf (·1 ), (·2 )i = (φσf (·1 ), ε(·2 )),
As : H10 (Ω) → (H10 (Ω)) 0
hAf (·1 ), (·2 )i = (φσf (·1 ), ε(·2 )),
2
2
K : L (Ω) → L (Ω)
Bφ : H10 (Ω) → L20 (Ω)
B1−φ :
H10 (Ω)
→
L20 (Ω)
hK(·1 ), (·2 )i = (φ2 κ−1
f (·1 ), (·2 )),
hBφ (·1 ), (·2 )i = −((·2 ), div(φ(·1 ))),
hB1−φ (·1 ), (·2 )i = −((·2 ), div((1 − φ)(·2 ))),
26
linearized poromechanics
problem (17) can be written in block form as:
ρf φ
0
0
(1−φ)2
κs
0
0
0
0
∂t vf
0
0
0
∂t p
0 ρs (1 − φ) ∂t ys
0
1
0
∂t vs
Af + K − θ
BTφ
0
Bφ
0
0
+
BT1−φ As
−K
0
0
−K
vf
Ff
B1−φ
p = Fp , (18)
K ys Fs
0
vs
−1
0
with the notation being understood. For the sake of analysis, we use
∂t ys instead of vs in the Stokes equation, mass and momentum conservation to obtain the following equivalent formulation:
∗
(ρf φ∂t vf , v∗f ) + (φσf , ε(v∗f )) − (θvf , v∗f ) + (φ2 κ−1
f vf , vf )
∗
∗
−(p, div(φv∗f )) − (φ2 κ−1
f ∂t ys , vf ) = (ρf φf, vf ),
(1 − φ)2
∂t p, q + (q, div(φvf )) + (q, div((1 − φ)∂t ys ) = (ρ−1
f θ, q),
κs
(ρs (1 − φ)∂t vs , ws ) + (σs , ε(ws )) + (φ2 κ−1
f ∂t ys , ws )
−(p, div((1 − φ)ws )) − (φ2 κ−1
f vf , ws ) = (ρs (1 − φ)f, ws ),
(ρs (1 − φ)∂t ys , v∗s ) − (ρs (1 − φ)vs , v∗s ) = 0,
(19)
for all test functions (v∗f , q, ws , v∗s ) in H10 (Ω) × L20 (Ω) × H10 (Ω) × L2 (Ω);
when written in block form, it reads
ρf φ
0
0
0
+
0
−K
(1−φ)2
κs
−B1−φ
0
K
0
ρs (1 − φ)
0
∂t vf
∂t p
∂
y
ρs (1 − φ) t s
0
0
∂t vs
Ff
vf
p Fp
= . (20)
ys Fs
BTφ
0
0
−Bφ
0
0
0
−K
BT1−φ
As
0
0
0
0
−ρs (1 − φ)
Af + K − θ
vs
0
Although at first glance formulation (20) breaks the structure of the
problem, it presents the useful property that the combination of the
two matrix blocks yields a generalized saddle point structure. This
property would not hold with (18), and it is fundamental in proving
the existence of solutions using Theorem 1. Also, we remark that our
formulation differs from that proposed in [50] in the functional setting. More precisely, we look for the solid velocity in a weaker space,
3.2 analysis of the semi-discrete problem
27
namely L2 (Ω) instead of H10 (Ω). Our choice is determined by the different approach to the analysis of the problem and in particular by the
fact that an energy estimate for vs in H10 (Ω) would be hardly derived.
Besides this technical difficulty, there is no reason to conclude that
vs and ys shall not belong to the same functional space. As a result,
in the numerical discretization of the problem we approximate both
using the same finite element space that is conforming to H10 (Ω).
Remark. Note that all blocks, except for As , depend on the porosity φ.
Also, our formulation differs from that proposed in [50] in the choice of test
functions. Indeed, they are interchanged between the displacement and solid
velocity equations, and moreover we look for the solid velocity in the space
L2 (Ω) instead of H10 (Ω). These choices present higher difficulties during the
analysis, but in return they shed light on the well-posedness of an alternative
formulation in which vs would no longer a variable.
3.2
analysis of the semi-discrete problem
In this section, we analyze a semi-discrete, continuous in time, version
of (17). We follow an approach similar to the one used in [5]. For
this, consider a family of triangulations {Th }h>0 of symplexes K of
characteristic size h and Pk (K) the polynomials of degree k > 1 in K
to define Xk
h = {q ∈ C(Ω) : q|K ∈ Pk (K) ∀K ∈ Th }. With them, we
define the following discrete spaces:
d
Vf,h = H10 (Ω) ∩ [Xk+1
h ] ,
Qp,h = L20 (Ω) ∩ Xk
h,
d
Vs,h = H10 (Ω) ∩ [Xk+1
h ] ,
d
Qv,h = L2 (Ω) ∩ [Xk
h] ,
which are conforming and satisfy the discrete inf-sup condition described later in Section 3.5. Then, the semi-discrete problem reads:
Find (vf,h (t), ph (t), ys,h (t), vs,h (t)) in Vf,h × Qp,h × Vs,h × Qv,h almost everywhere in t > 0 such that
(ρf φ∂t vf,h , v∗f,h ) + (φσf (vf,h ), ε(v∗f,h ))
∗
−(θvf,h , v∗f,h ) + (φ2 κ−1
f vf,h , vf,h )
∗
∗
−(ph , div(φv∗f,h )) − (φ2 κ−1
f ∂t ys,h , vf,h ) = (ρf φf, vf,h ),
(1 − φ)2
∂t ph , qh + (qh , div(φvf,h ))
κs
+(qh , div((1 − φ)∂t ys,h ) = (ρ−1
f θ, qh ),
(ρs (1 − φ)∂t vs,h , ws,h ) + (σs (ys,h ), ε(ws,h ))
+(φ2 κ−1
f ∂t ys,h , ws,h ) − (ph , div((1 − φ)ws,h ))
−(φ2 κ−1
f vf,h , ws,h ) = (ρs (1 − φ)f, ws,h ),
((1 − φ)∂t ys,h , v∗s,h ) − ((1 − φ)vs,h , v∗s,h ) = 0,
(21)
for any test functions (v∗f,h , qh , ws,h , v∗s,h ) in Vf,h × Qp,h × Vs,h ×
Qv,h , and for given initial conditions vf,h (0) = Πf,h ¸f , ph (0) = Πp,h ξp , ys,h (0) =
28
linearized poromechanics
Πs,h ¸s , vs,h (0) = Πv,h ¸v ; here, Π(·),h denotes the L2 projection to the
corresponding discrete space. From now on it makes no contribution
to specify the h subindex, and we will thus omit it on the remaining
of this section.
For the analysis of problem (21) we make use of the following result
from the theory of Differential Algebraic Equations [52].
Theorem 1. Let L : [0, T ] → RN and E, H in RN×N be given arrays.
Then, the differential algebraic equation given by
E
dX
(t) + HX(t) = L(t),
dt
t>0
has at least one solution X : [0, T ] → RN for any initial condition X(0) = X0
if sE + H is invertible for some s 6= 0.
Finally, we will make use of Korn’s inequality [42]:
kε(v)kL2 (Ω) > αk |v|H1 (Ω)
∀v ∈ H10 (Ω),
(22)
for some positive constant αk and the following assumptions.
(H1) The porosity φ is such that φ, 1/φ, (1 − φ) and (1 − φ)−1 belong
to W s,r (Ω) with s > d/r and r > 1, and there exist two positive constants φ and φ such that 0 < φ 6 φ 6 φ < 1 almost
everywhere in Ω.
(H2) The stress tensors σs and σf give rise to continuous elliptic bilinear forms:
∃Cskel > 0
:
(σs (ws ), ε(ws )) > Cskel kε(ws )k2L2 (Ω) ,
∃Cvis > 0
:
(φσvis (v∗f ), ε(v∗f ))
− (θv∗f , v∗f ) > φ Cvis kε(v∗f )k2L2 (Ω) ,
for all test functions ws ∈ H10 (Ω) and v∗f ∈ H10 (Ω).
(H3) The permeability tensor is symmetric and positive:
∗ ∗
∗ 2
∃Ck > 0 : (φκ−1
f vf , vf ) > Ck kvf kL2 (Ω)
∀v∗f ∈ H10 (Ω).
From these hypotheses, we obtain the relevant ellipticity estimates,
which we collect in the following lemma to be used later in both the
well-posedness analysis and the energy estimate. We point out that
the hypothesis (H2) poses a hard restriction on the parameter θ. We
set such a strong requirement for the sake of simplicity as it will be
used in what follows to straightforwardly prove the existence and the
stability of solutions. However, it can be relaxed by means of a more
refined approach to the analysis that exploits an exponential scaling
of the velocity, namely vf,λ = exp{−λt} vf . Choosing λ sufficiently
large would make such requirement unnecessary, but the analysis of
the problem would turn out to be more involved.
3.2 analysis of the semi-discrete problem
29
Lemma 2. Under hypotheses (H1), (H2) and (H3) there exist two positive
constants αf , αs such that:
(σs (ws ), ε(ws )) > αs kws k2H1 (Ω) ∀ws ∈ H10 (Ω),
∗ ∗
∗ 2
(φσf (v∗f ), ε(v∗f )) + ([φκ−1
f − θI]vf , vf ) > αf kvf kH1 (Ω)
∀v∗f ∈ H10 (Ω).
Proof. The result is a direct application of Korn’s inequality with hypotheses (H1), (H2) and (H3), with αs = Cskel αk and αf = min{φ Cvis αk , Ck }.
3.2.1
Existence and uniqueness
Problem (20) can be cast into the framework of Theorem 1 by defining
the following operators:
ρf φ
0
E :=
0
0
−K
(1−φ)2
κs
−B1−φ
0
K
0
ρs (1 − φ)
0
0
and
ρs (1 − φ)
0
0
Af + K − θ
BTφ
0
0
−Bφ
0
0
0
.
H :=
BT1−φ As
−K
0
0
0
0
−ρs (1 − φ)
Then, identifying each operator with its induced matrix in boldface
as Af , As , K, Bφ , B1−φ . We also define M(ζ) the weighted mass matrix related to the inner product (ζz, z∗ ) and the mass matrices Av , Ap
associated to vs and p, which give:
T
Bφ
Af + M(ρf φ) + K − M(θ)
K
0
K
As + K
M(ρs (1−φ))
0
−M(ρs (1−φ))
Av
Bφ
B1−φ
0
E +H =
"
T
B1−φ
= A
B
0
−Ap
where
Af + M(ρf φ) + K − M(θ)
K
K
As + K
0
−M(ρs (1−φ))
A=
h
B = Bφ
B1−φ
i
0 ,
0
M(ρs (1−φ))
,
Av
C = Ap .
We first show the ellipticity of A and the inf-sup condition of B
(Section 3.5) to then use Theorem 13 from A.
Lemma 3. The matrix A is positive definite.
BT
−C
#
,
30
linearized poromechanics
Proof. We proceed directly from the bilinear forms testing against the
2 −1
2 −1
solution, using the inequality 2(φ2 κ−1
f u, v) 6 (φ κf u, u) + (φ κf v, v)
and hypotheses (H1), (H2). We define A(·, ·) the bilinear form associated to matrix A:
A((vf , ys , vs ), (vf , ys , vs ))
= (ρf φvf , vf ) + (φσvis , ε(vf )) + ([φ2 κ−1
f − θI]vf , vf )
− (φ2 κ−1
f ys , vf ) + (ρs (1 − φ)vs , ys ) + (σskel , ε(ys ))
2 −1
+ (φ2 κ−1
f ys , ys ) − (φ κf vf , ys ) − (ρs (1 − φ)ys , vs )
+ (ρs (1 − φ)vs , vs )
= (ρf φvf , vf ) + (φσvis , ε(vf )) + (φ2 κ−1
f vf , vf )
− (θvf , vf ) + (σskel , ε(ws )) + (φ2 κ−1
f ys , ys )
+ (ρs (1 − φ)vs , vs ) − 2(φ2 κ−1
f ys , vf )
∀(vf , ys , vs ) ∈ H10 (Ω) × H10 (Ω) × L2 (Ω);
then we obtain
A((vf , ys , vs ), (vf , ys , vs ))
> (ρf φvf , vf ) + (φσvis , ε(vf )) − (θvf , vf )
+ (σskel , ε(ys )) + Cv kvs k2L2 (Ω)
> αf kvf k2H1 (Ω) + Cs kys k2H1 (Ω) + Cv kvs k2L2 (Ω)
∀(vf , ys , vs ) ∈ H10 (Ω) × H10 (Ω) × L2 (Ω),
where we note that control of the term with θ is given by hypothesis
(H2).
Lemma 4. The matrices B, C are such that ker B T ∩ ker C = {0}.
Proof. From Theorem 9 we have that B is surjective and thus B T is
injective, which yields the result.
Remark. Note that although C is a mass matrix, usually the constant κs
is very large, which makes the matrix E + H positive semi-definite in practice and may produce numerical instabilities. This motivates the use of B
for the proof instead, which gives the same result regardless of the problem
parameters.
We can now state the existence result.
Lemma 5. There exists at least one solution to problem (21).
Proof. It follows from Lemmas 3 and 4 which enable Theorem 13 from
Appendix A.
3.2 analysis of the semi-discrete problem
31
To prove uniqueness, we consider the problem with null initial data
X0 and forcing terms L(t); because of the linearity we only need to
prove that this problem has unique (null) solution. We will make use
of the identity ∂t (f2 ) = 2f∂t f, the notation c(x, y) = (φ2 κ−1
f x, y),
Young’s inequality 2 ab 6 a2 + b2 and the following result regarding norm
recalling the definition of the weighted norm
R equivalence,
2
2
kvkζ = v ζdx:
Lemma 6. The following inequalities hold for t in [0, T ] almost everywhere:
q
q
ρf φkvf (t)kL2 (Ω) 6 kvf (t)kρf φ 6 ρφkvf (t)kL2 (Ω) ,
q
q
ρs (1 − φ)kvs (t)kL2 (Ω) 6 kvs (t)kρs (1−φ) 6 ρs (1 − φ)kvs (t)kL2 (Ω) ,
q
q
−1
2
2
κs (1 − φ) kp(t)kL2 (Ω) 6 kp(t)k(1−φ)2 /κs 6 κ−1
s (1 − φ) kp(t)kL2 (Ω) .
Proof. We use the following: kψk2L2 (Ω) =
−1
ρ−1
kψk2ρf φ .
f φ
R
2 −1 −1 )(ρ φ) dx
f
Ω ψ (ρf φ
6
All inequalities are proved analogously.
Theorem 2. There exists a unique solution (vf , p, ys , vs ) in L2 (0, T ; Vf,h ) ×
L∞ (0, T ; Qp,h ) × L∞ (0, T ; Vs,h ) × L∞ (0, T ; Qv,h ) of problem (21).
Proof. We test system (19) with the solution as (vf (t), p(t), ∂t ys (t), vs (t))
and sum the first three equations to obtain the following:
1
(1 − φ)2
∂t (ρf φvf (t), vf (t)) +
p(t), p(t) + (ρs (1 − φ)vs (t), vs (t))
2
κs
+(φσvis (vf (t)), ε(vf (t))) + c(vf (t), vf (t)) − (θ(t)vf (t), vf (t)) − 2c(∂t ys (t), vf (t))
+(σskel (ys (t)), ε(∂t ys (t))) + c(∂t ys (t), ∂t ys (t)) = 0.
(23)
As in the existence proof, we use Young’s inequality with c(x, y) and
hypothesis (H2) to obtain
1
(1 − φ)2
0 > ∂t (ρf φvf (t), vf (t)) +
p(t), p(t) + (ρs (1 − φ)vs (t), vs (t))
2
κs
+ (σvis (vf (t)), ε(vf (t))) − (θ(t)vf (t), vf (t)) + (σskel (ys (t)), ε(∂t ys (t)))
1
(1 − φ)2
> ∂t (ρf φvf (t), vf (t)) +
p(t), p(t) + (ρs (1 − φ)vs (t), vs (t))
2
κs
+(σskel (ys (t)), ε(ys (t))))
+ (σvis (vf (t)), ε(vf (t))) − (θ(t)vf (t), vf (t)).
32
linearized poromechanics
Integrating in time in (0, s) and using Lemma 6, we obtain the following inequality for a general positive constant C:
(1 − φ)2
p(s), p(s) + (ρs (1 − φ)vs (s), vs (s))
κs
Zs
+ (σskel (ys (s)), ε(ys (s))) + αf kvf (s)k2H1 (Ω) ds
0
2
2
> C kvf (t)kL2 (Ω) + kp(t)kL2 (Ω) + kvs (t)k2L2 (Ω)
+kys (t)k2H1 (Ω) + kvf (t)k2L(0,s;H1 (Ω)) > 0,
0 > (ρf φvf (s), vf (s)) +
which holds for every t > 0. We thus conclude that
kvf kL∞ (0,T ;L2 (Ω)) = kvf kL2 (0,T ;H1 (Ω)) = kpkL∞ (0,T ;L2 (Ω))
= kvs kL∞ (0,T ;L2 (Ω)) = kys kL∞ (0,T ;H1 (Ω)) = 0.
In particular, we get that all functions (vf , p, ys , vs ) are zero in the
L∞ (0, T ; L2 (Ω)) topology.
3.2.2
Stability analysis of the semi-discrete problem
In this section we prove that the solution of the semi-discrete problem
(21) is upper bounded with respect to the data, which is equivalent
to the well-posedness in the sense of Hadamard [91]. This result will
be used in Section 3.3 for the proof of existence of solutions of the
continuous problem. For this, we proceed as in Section 3.2.1 but using
non null data instead:
1
(1 − φ)2
∂t (ρf φvf (t), vf (t)) +
p(t), p(t) + (ρs (1 − φ)vs (t), vs (t))
2
κs
+ (σskel (ys (t)), ε(ys (t))))
+ (σvis (vf (t)), ε(vf (t))) − (θ(t)vf (t), vf (t))
1
6 (ρf φf(t), vf (t)) + (θ(t), p(t)) + (ρs (1 − φ)f(t), vs (t)).
ρf
(24)
Throughout this section we denote with c = c(ρf , ρs , φ, κs , αs , αf )
a data dependent constant used for lower bounds and with C =
C(ρf , ρs , φ, κs , λ, µ, µf ) another one for upper bounds. We will make
use of Young’s generalized inequality for every > 0: (a, b)X 6
3.2 analysis of the semi-discrete problem
33
1
+ 2
kbk2X . Consider > 0, then from (24) we first expand
the right hand side (r.h.s):
1
r.h.s 6
kf(t)k2ρf φ + kθ(s)k2L2 (Ω) + kf(t)k2ρs (1−φ)
+ kvf (t)k2ρf φ + kp(t)k2L2 (Ω) + kvs (t)k2ρs (1−φ)
C
6
kf(t)k2L2 (Ω) + kθ(s)k2L2 (Ω)
+ C kvf (t)k2L2 (Ω) + kp(t)k2L2 (Ω) + kvs (t)k2L2 (Ω) . (25)
2
2 kakX
Integrating in time in (0, t), the left hand side (l.h.s) of (24) with hypothesis (H2) and Lemma 6 becomes
Zt
l.h.s > kvf (s)k2ρf φ + kp(s)k2(1−φ)2 + kvs (s)k2ρs (1−φ)
0
κs
s=t
Zt
+(σs (ys (s)), ε(ys (s))))
+ αf kvf (s)k2H1 (Ω) ds
0
s=0
2
2
> c kvf (t)kL2 (Ω) + kp(t)kL2 (Ω) + kvs (t)k2L2 (Ω)
Zt
2
2
+kys (t)kH1 (Ω) + kvf (s)kH1 (Ω) ds
0
2
− C kvf (0)kL2 (Ω) + kp(0)k2L2 (Ω) + kvs (0)k2L2 (Ω) + kys (0)k2H1 (Ω) .
(26)
Using the right hand side upper bound (25) and the left hand side
lower bound (26) on estimate (24) we obtain:
c kvf (t)k2L2 (Ω) + kp(t)k2L2 (Ω) + kvs (t)k2L2 (Ω)
Zt
2
2
+kys (t)kH1 (Ω) + kvf (s)kH1 (Ω) ds
0
Z
C t
kf(s)k2L2 (Ω) + kθ(s)k2L2 (Ω) ds
6
0
+ C kvf (0)k2L2 (Ω) + kp(0)k2L2 (Ω) + kvs (0)k2L2 (Ω) + kys (0)k2H1 (Ω)
Zt + C
kvf (t)k2L2 (Ω) + kp(t)k2L2 (Ω) + kvs (t)k2L2 (Ω) ds.
0
RT
(27)
Taking the supremum of t in (0, T ) and using the upper bound 0 ϕ(s) ds 6
T |ϕ|∞ we obtain the following estimate:
(c − CT ) kvf k2L∞ (0,T ;L2 (Ω)) + kp k2L∞ ((0,T ;L2 (Ω)) + kvs k2L∞ (0,T ;L2 (Ω))
+ c kys kL∞ (0,T ;H1 (Ω)) + kvf k2L2 (0,T ;H1 (Ω))
C 2
kfkL2 (0,T ;L2 (Ω)) + kθk2L2 (0,T ;L2 (Ω))
6
+ C kvf (0)k2L2 (Ω) + kp(0)k2L2 (Ω) + kvs (0)k2L2 (Ω) + kys (0)k2H1 (Ω) ,
34
linearized poromechanics
where we choose =
c
2CT ,
thus obtaining the following estimate.
kvf k2L∞ (0,T ;L2 (Ω)) + kvf k2L2 (0,T ;H1 (Ω)) + kys kL∞ (0,T ;H1 (Ω))
+ kpk2L2 ((0,T ;L2 (Ω)) + kvs k2L2 (0,T ;L2 (Ω))
6 C̃T kfk2L2 (0,T ;L2 (Ω)) + kθk2L2 (0,T ;L2 (Ω))
+ C̃ kvf (0)k2L2 (Ω) + kp(0)k2L2 (Ω)
+kvs (0)k2L2 (Ω) + kys (0)k2H1 (Ω) ,
(28)
where C̃ = 2 max{C, C2 }c−1 . Now we extend the previous estimate to
include time derivatives, which will be useful later when we apply
the Faedo-Galerkin method [156] to show the existence of solutions
at the continuous level. First from the fluid equation in (21) we obtain
the following bound for every test function v∗f in H10 (Ω):
(ρf φ∂t vf (t), v∗f ) 6 C kf(t)k(H1 (Ω)) 0 + kp(t)kL2 (Ω)
0
+k∂t ys (t)kL2 (Ω) + kvf (t)kH1 (Ω) kv∗f k1,Ω .
Thus, since for all S in (H10 (Ω)) 0 we have
kSk(H1 (Ω)) 0 =
0
S(v)
,
kvkH1 (Ω)
v∈H1 (Ω),v6=0
sup
0
0
using Lemma 6, ∂t ys = vs , taking the supremum on kv∗f kH1 (Ω) = 1
and then squares on both sides we get
kρf φ∂t vf (t)k2(H1 (Ω)) 0
0
6 C kf(t)k2(H1 (Ω)) 0 + kp(t)k2L2 (Ω) + kvs (t)k2L2 (Ω) + kvf (t)k2H1 (Ω) .
0
(29)
Similarly, from the solid momentum we get for every test function ws
in H10 (Ω) that
(ρs (1 − φ)∂t vs (t), ws )
6 C kys (t)kH1 (Ω) + k∂t ys (t)kL2 (Ω) + kvf (t)k2L2 (Ω)
+kp(t)kL2 (Ω) + kf(t)k(H1 (Ω)) 0 kws kH1 (Ω) ,
0
and taking the supremum on kws kH1 (Ω) = 1 we obtain
kρs (1 − φ)∂t vs (t)k2(H1 (Ω)) 0
0
6
C(kys (t)k2H1 (Ω) + kvs (t)k2L2 (Ω) + kvf (t)k2L2 (Ω)
+ kp(t)k2L2 (Ω) + kf(t)k2(H1 (Ω)) 0 ).
0
(30)
3.2 analysis of the semi-discrete problem
From the mass conservation equation, we obtain for every test function q in H1 (Ω) that
(1 − φ)2
∂t p(t), q
κs
6 C kθ(t)kL2 (Ω) + kvs (t)kL2 (Ω) + kvf (t)kL2 (Ω) kqkH1 (Ω) ,
thus taking supremum on kqkH1 (Ω) we obtain
2
k(1 − φ)2 κ−1
s ∂t p(t)k(H1 (Ω)) 0
6 C kθ(t)k2L2 (Ω) + kvs (t)k2L2 (Ω) + kvf (t)k2L2 (Ω) .
(31)
As vs = ∂t ys , we analogously get for v∗s in L2 (Ω) that
k(1 − φ)∂t ys (t)k2L2 (Ω) = k(1 − φ)vs (t)k2L2 (Ω) 6 Ckvs (t)k2L2 (Ω) . (32)
Finally, using estimates (28), (29), (30), (31) and (32), weighted by positive constants α1 , α2 , α3 and α4 respectively combined with (28) and
kf(t)k(H1 (Ω)) 0 6 kf(t)kL2 (Ω) we get the following estimate:
0
α1 kρf φ∂t vf kL2 (0,T ;(H1 (Ω)) 0 ) + α2 kρs (1 − φ)∂t vs kL2 (0,T ;(H1 (Ω)) 0 )
0
+ α3 k(1 − φ)2 κ−1
s ∂t pkL2 (0,T ;(H1 (Ω)) 0 )
0
+ α4 k(1 − φ)∂t ys k2L2 (0,T ;L2 (Ω))
+ (1 − [α1 + α2 + α3 ]C)kvf k2L∞ (0,T ;L2 (Ω)) + (1 − α1 C)kvf k2L2 (0,T ;H1 (Ω))
+ (1 − α2 C)kys kL∞ (0,T ;H1 (Ω)) + (1 − [α1 + α2 ]C)kpk2L2 ((0,T ;L2 (Ω))
+ (1 − [α1 + α2 + α3 + α4 ]C)kvs k2L2 (0,T ;L2 (Ω))
6 C kfk2L2 (0,T ;L2 (Ω)) + kθk2L2 (0,T ;L2 (Ω))
+ C̃ kvf (0)k2L2 (Ω) + kp(0)k2L2 (Ω)
+kvs (0)k2L2 (Ω) + kys (0)k2H1 (Ω) ,
(33)
where C = max{C̃T , C}. Choosing (αi )4i=1 such that 1 − [α1 + α2 +
α3 + α4 ]C > 1/2, 1 − [α1 + α2 + α3 ]C > 1/2, 1 − α1 C > 1/2, 1 − α2 C >
1/2 and 1 − [α1 + α2 ]C > 1/2, i.e. αi = 1/8C for all i, we can give a
complete energy estimate, which we state in the following theorem
(we restore the subindex h for readability).
35
36
linearized poromechanics
Theorem 3. There exists unique solution to problem (21) which satisfies the
following a priori estimate:
kρf φ∂t vf,h kL2 (0,T ;(H1 (Ω)) 0 ) + kρs (1 − φ)∂t vs,h kL2 (0,T ;(H1 (Ω)) 0 )
0
0
+ k(1 − φ)2 κ−1
s ∂t ph kL2 (0,T ;(H1 (Ω)) 0 )
+ k(1 − φ)∂t ys,h k2L2 (0,T ;(H1 (Ω)) 0 )
0
+ kvf,h k2L∞ (0,T ;L2 (Ω)) + kvf,h k2L2 (0,T ;H1 (Ω))
+ kys,h kL∞ (0,T ;H1 (Ω)) + kph k2L2 (0,T ;L2 (Ω))
+ kvs,h k2L2 (0,T ;L2 (Ω))
6 C kfk2L2 (0,T ;L2 (Ω)) + kθk2L2 (0,T ;L2 (Ω))
+ C̃ kvf,h (0)k2L2 (Ω) + kph (0)k2L2 (Ω)
+kvs,h (0)k2L2 (Ω) + kys,h (0)k2H1 (Ω) .
(34)
3.3
analysis of the continuous problem
In this section we prove that there exists a unique solution of problem (17). For this we use a Faedo-Galerkin argument, which consists
in proving that a discrete solution converges to a limit that solves
the continuous problem. Typical Faedo-Galerkin schemes use the finite dimensional spaces generated by the eigenvectors of the problem
[72], but other discrete constructions, such as Galerkin schemes are acceptable [156], the latter being the approach we use. Here we recall
2
that a sequence fn |∞
n=1 in L (I, X), with I ⊂ R and X Banach space,
2
converges weakly to f in L (I, X), written fn * f, if and only if
ZT
ZT
(Θ, fn )X → (Θ, f)X ∀Θ ∈ L2 (I, X 0 ).
0
0
0 |∞
fn
n=1
L2 (I, X 0 )
0
0
A sequence
in
converges weakly to f 0 in L2 (I, X 0 ) (or
∗
0 * f 0 , if and only if
weakly*), written fn
ZT
ZT
0
(fn , x) → (f 0 , x) ∀x ∈ L2 (I, X),
and further note that weak convergence implies weak convergence in
the dual space thanks to the Riesz isometry. We will make use of the
Banach-Alaoglu-Bourbaki Theorem, which states that the closed ball
is weakly compact [43]. The Faedo-Galerkin technique, used in the
following Lemma, which consists in (i) obtaining an estimate which
gives the inclusion of the solution in a closed ball, (ii) using such
inclusion to apply the Banach-Alaoglu-Bourbaki [43, Theorem 3.16]
theorem to extract a weakly (or weakly*) convergent subsequence and
(iii) proving that the limit function is a solution of the problem.
Lemma 7. There exists a solution (vf , p, ys , vs ) in H10 (Ω) × L20 (Ω) × H10 (Ω) ×
L2 (Ω) to problem (17) that satisfies the energy estimate (34).
3.3 analysis of the continuous problem
37
Proof. Consider a solution (vf,h , ph , ys,h , vs,h ) in Vf,h × Qp,h × Vs,h ×
Qv,h of problem (21), then in virtue of estimate (34) we use the BanachAlaoglu-Bourbaki theorem to obtain a subsequence (vf,h 0 , ph 0 , ys,h 0 , vs,h 0 )|h 0 >0 ,
in which we replace h 0 with h for simplicity, such that:
∂t vf,h * ∂t vf ∈ L2 (0, T ; (H10 (Ω)) 0 ),
vf,h * vf ∈ L2 (0, T ; H10 (Ω)),
ys,h * ys ∈ L2 (0, T ; H10 (Ω)), ∂t ys,h * ∂t ys ∈ L2 (0, T ; (L2 (Ω)) 0 ),
∂t vs,h * ∂t vs ∈ L2 (0, T ; (H10 (Ω)) 0 ),
vs,h * vs ∈ L2 (0, T ; L2 (Ω)),
ph * p ∈ L2 (0, T ; L2 (Ω)).
(35)
We obtain convergence of all linear forms as follows: Consider the test
∗
functions ϕ in C∞
0 (0, T ) (compactly supported functions in (0, T )), vf,h
in Vf,h , qh in Qp,h , ws,h in Vs,h and v∗s,h in Qv,h . With them, we use
the weak convergence results from Theorem 3 and extract convergent
subsequences as in (35) to proceed as follows:
(i) Limit of the fluid equation terms:
ZT
0
(φ∂t vf,h , ϕ(t)v∗f,h ) dt
ZT
(φ∂t vf (t), ϕ(t)v∗f,h ) dt
→
0
as ∂t vf,h converges in L2 (0, T ; (H10 (Ω)) 0 ),
ZT
0
(σvis (vf,h (t)), ϕ(t)ε(v∗f,h )) dt
ZT
→
0
(σvis (vf (t)), ϕ(t)ε(v∗f,h )) dt
as vf,h converges in L2 (0, T ; H10 (Ω)),
ZT
(φ
0
2
∗
[κ−1
f − θI]vf,h (t), ϕ(t)vf,h ) dt
ZT
→
0
∗
(φ2 [κ−1
f − θI]vf (t), ϕ(t)vf,h ) dt
as vf,h converges in L2 (0, T ; L2 (Ω)) and
ZT
0
∗
(φ2 κ−1
f vs,h (t), ϕ(t)vf,h )
ZT
→
0
∗
(φ2 κ−1
f vs (t), ϕ(t)vf,h ) dt
as vs,h converges in L2 (0, T ; L2 (Ω)).
(ii) Limit of the mass conservation terms, understood in integral form
(1 − φ)2
p(t) =
κs
(1 − φ)2
ΠQp,h p(0) + ρ−1
f θ
κs
Zt
− div(φvf (s)) ds + div((1 − φ)[ys (t) − ΠVs,h ys (0)]) :
0
ZT 0
(1 − φ)2
ph , ϕ(t)qh
κs
ZT dt →
0
(1 − φ)2
p, ϕ(t)qh
κs
dt
38
linearized poromechanics
as ph converges in L2 (0, T ; L2 (Ω)),
ZT Zt
ZT Zt
(div(φvf,h (s)), ϕ(t)qh ) ds dt →
(div(φvf (s)), ϕ(t)qh ) ds dt
0
0
0
0
as vf,h converges in L2 (0, T ; H10 (Ω)) and
ZT
ZT
(div((1 − φ)ys,h (t)), ϕ(t)qh ) dt → (div((1 − φ)ys (t)), ϕ(t)qh ) dt
0
0
L2 (0, T ; H10 (Ω)),
where for the second term there
as ys,h converges in
is an extra intermediate step. We define the functional
Zt
Fqh (t) (vf,h ) = (div(φvf,h (s)), qh (t)) ds,
0
which is bounded by using hypothesis (H1) and Cauchy-Schwartz:
ZT
Fqh (t) (vf,h ) 6 Cφ
kvf,h kH1 (Ω) kqh (t)kL2 (Ω) ds
0
6 Cφ kvf,h kL2 (0,T ;H1 (Ω)) kqh (t)kL2 (0,T ;L2 (Ω)) .
The result is an application of weak convergence to the functional
Fqh (t) .
(iii) Limit of the solid equation terms:
ZT
ZT
((1 − φ)∂t vs,h (t), ϕ(t)ws,h ) dt → ((1 − φ)∂t vs (t), ϕ(t)ws,h ) dt
0
0
as ∂t vs,h converges in L2 (0, T ; (H10 (Ω)) 0 ),
ZT
ZT
(CHooke ε(ys,h (t)), ϕ(t)ws,h ) dt → (CHooke ε(ys (t)), ϕ(t)ws,h ) dt
0
0
as ys,h converges in L2 (0, T ; H10 (Ω)),
ZT
ZT
(φ2 κ−1
v
(t),
ϕ(t)w
)
→
(φ2 κ−1
s,h
s,h
f
f vs (t), ϕ(t)ws,h ) dt
0
0
as vs,h converges in L2 (0, T ; L2 (Ω)) and
ZT
ZT
(φ2 κ−1
v
(t),
ϕ(t)w
)
→
(φ2 κ−1
f,h
s,h
f
f vf (t), ϕ(t)ws,h ) dt
0
0
as vf,h converges in L2 (0, T ; H10 (Ω)).
(iv) Limit of the solid velocity terms:
ZT
ZT
((1 − φ)∂t ys,h (t), ϕ(t)vs,h ) dt → ((1 − φ)∂t ys (t), ϕ(t)vs,h ) dt
0
0
as ∂t ys,h converges in L2 (0, T ; L2 (Ω)) and
ZT
ZT
((1 − φ)vs,h (t), ϕ(t)vs,h ) dt → ((1 − φ)vs (t), ϕ(t)vs,h ) dt
0
0
3.3 analysis of the continuous problem
39
as vs,h converges in L2 (0, T ; L2 (Ω)).
Finally, all time integrals in (0, T ) can be removed due to the fact
∞
2
that ϕ belongs to C∞
c (0, T ) and that Cc (0, T ) ⊗ X is dense in L (0, T ; X)
[156]. As a consequence, the limit functions are a solution of the following problem:
∗
(φ∂t vf , v∗f,h ) + (φσf , ε(v∗f )) + ([φ2 κ−1
f − θI]vf , vf,h )
(1 − φ)2
p, qh +
κs
Zt
0
∗
∗
−(φ2 κ−1
f ∂t ys , vf,h ) = (φf, vf,h ),
(div(φvf (s)), qh ) ds
+(div((1 − φ)(ys − ΠVs,h ys (0))), qh ) ds = (ρ−1
f θ, qh ),
((1 − φ)∂t vs , ws,h ) + (σs , ε(ws,h )) + (φ2 κ−1
f ∂t ys , ws,h )
−(φ2 κ−1
f vf , ws,h ) = ((1 − φ)f, ws,h ),
((1 − φ)∂t ys , v∗s,h ) − ((1 − φ)vs , v∗s,h ) = 0,
(36)
for all test functions (v∗f,h , qh , ws,h , v∗s,h ) in Vf,h × Qp,h × Vs,h × Qv,h .
Finally, as we are using conforming approximations, and thus for every test function (v∗f , q, ws , v∗s ) in H10 (Ω) × L20 (Ω) × H10 (Ω) × L2 (Ω)
there exists a sequence of functions (v∗f,h , qh , ws,h , v∗s,h ) in Vf,h ×
Qp,h × Vs,h × Qv,h , such that (v∗f,h , qh , ws,h , v∗s,h ) → (v∗f,h , qh , ws,h , v∗s,h )
strongly in h. We thus obtain that (36) also holds for all test functions
(v∗f , q, ws , v∗s ) in H10 (Ω) × L20 (Ω) × H10 (Ω) × L2 (Ω), which proves the
existence. Finally, the energy estimate (34) uses only the regularity of
the continuous functions, which concludes the proof.
Remark. The conservation of mass is satisfied in integral form
(1 − φ)2
(1 − φ)2
p(t) =
ΠQp,h p(0)
κs
κs
Zt
−1
+ ρf θ − div(φvf (s)) ds + div (1 − φ)(ys (t) − ΠVs,h ys (0))
0
as an equality in L2 (Ω); however, the corresponding differential form
∂t p + div(φvf + (1 − φ)vs ) = ρ−1
f θ,
is only satisfied in (H1 (Ω)) 0 . Indeed, the term div vs belongs to (H1 (Ω)) 0 ,
and no extra regularity can be obtained a priori for the solid velocity. In
such cases, p is also referred to as a mild solution. It is also possible to
write the problem for a pressure in L2 (0, T ; (H1 (Ω)) 0 ), and as ∂t p was
shown to be in L2 (0, T ; (H1 (Ω)) 0 ) as well, we would have higher regularity in time by lowering the spatial regularity. In other words, p belongs
to C(0, T ; (H1 (Ω)) 0 ) ∩ L2 (0, T ; L2 (Ω)) due to the continuous embedding
H1 (0, T ; X) ⊂ C([0, T ]; X), where X is an arbitrary Banach space and C(I, X)
is the space of continuous functions from I ⊂ R to X.
40
linearized poromechanics
We now verify that the solutions constructed in Lemma 7 are consistent with the initial conditions of the discrete problem (21).
Lemma 8. The initial condition of the previously constructed solution is the
weak limit of the initial condition of the discrete solution.
Proof. From now on we consider a function ϕ in C∞
c ([0, T ]) such
that ϕ(T ) = 0 and ϕ(0) = 1. With this, for a general function u in
L2 (0, T ; X) with ∂t u in L2 (0, T ; X 0 ) and a function v in X we get
ZT
ZT
h∂t u, ϕviX 0 ,X dt = (u(0), v) −
0
∂t ϕ(u, v) dt.
(37)
0
We now write all equations in (36) and (21) as follows:
ZT
ZT
0
(φ∂t vf , ϕv∗f,h ) dt =
ZT
0
ZT
(φ∂t vf,h , ϕv∗f,h ) dt =
0
ZT ZT
2
(1 − φ)
p, ϕqh dt =
κs
0
0
ZT
ZT (1 − φ)2
ph , ϕqh =
κs
0
0
ZT
ZT
((1 − φ)∂t vs , ϕws,h ) dt =
0
0
ZT
0
ZT
((1 − φ)∂t vs,h , ϕws,h ) dt =
0
((1 − φ)∂t ys , ϕvs,h ) dt =
ZT
0
0
ZT
((1 − φ)∂t ys,h , ϕvs,h ) dt =
0
Ff (vf,h , ys,h , vs,h , v∗f,h ) dt,
ϕFp (p, vf , ys , qh ) dt,
ϕFp (ph , vf , ys , qh ) dt,
Fs (vf , ys , vs , ws,h ) dt,
Fs (vf,h , ys,h , vs,h , ws,h ) dt,
0
ZT
ZT
Ff (vf , ys , vs , v∗f,h ) dt,
0
Fv (vf , ys , vs , v∗s,h ) dt,
Fv (vf,h , ys,h , vs,h , v∗s,h ) dt,
for all (v∗f,h , qh , ws,h , v∗s,h ) in Vf,h × Qp,h × Vs,h × Qv,h . From them,
using (37) we can take the limit of the discrete solution for every
discrete test function:
ZT
∂t ϕ(vf , v∗f,h ) dt +
ZT
(vf (0), vf,h ) =
ϕFf (vf , ys , vs , v∗f,h ) dt
0
0
ZT
ZT
∗
= lim (vf,h , ∂t ϕvf,h ) dt +
ϕFf (vf,h , ys,h , vs,h , v∗f,h ) dt
h→0 0
0
= lim (ΠVf,h vf (0), v∗f,h ).
h→0
This ensures consistency for every v∗f,h in Vf,h , and by density we obtain the consistency of the initial condition. Proceeding analogously
for ∂t ys and ∂t vs gives the desired result. Note that the pressure does
not require such procedure, as the initial condition appears explicitly
in the integral equation.
Corollary 1. The previously constructed solution is unique.
3.4 error analysis of a fully discrete formulation
41
Proof. Consider two solutions with the same forcing terms and the
same initial conditions. The problem that arises by considering their
difference due to linearity has null datum, and using the energy estimate (34) we see that the solution is null.
We have thus proved the following theorem, which is the main
result of this section.
Theorem 4. There exists a unique solution (vf , p, ys , vs ) in L2 (0, T ; H10 (Ω)) ×
L2 (0, T ; L20 (Ω)) × L2 (0, T ; H10 (Ω)) × L2 (0, T ; L2 (Ω)) of problem (21) which
satisfies the energy estimate (34) and is consistent with the initial data.
3.4
error analysis of a fully discrete formulation
We consider, as in Section 3.2, a family of triangulations {Th }h>0 of
symplexes K of characteristic size h and the discrete spaces Vf,h , Vs,h , Qp,h ,
with the added regularity of Qv,h = Vs,h . We also define the full
spaces X = H10 (Ω) × L20 (Ω) × H10 (Ω) × H10 (Ω) and Xh = Vf,h × Qp,h ×
Vs,h × Qv,h with norm
k(vf , p, ys , vs )k2X := kvf k2H1 (Ω) + kpk2L2 (Ω) + kys k2H1 (Ω) + kvs k2H1 (Ω) ,
k
k
1
k
and set the projections P0,h
: L2 (Ω) → Xk
h , P1,h : H (Ω) → Xh together with their approximation properties [156]:
k vk
`
• (APH,1 ): kv − P1,h
1,Ω 6 Ch |vf |`+1,Ω , 1 6 ` 6 k for each vf in
`+1
H
(Ω).
k vk
`+1 |v|
• (APH,0 ): kv − P1,h
0,Ω 6 Ch
`+1,Ω , 1 6 ` 6 k for each v
`+1
in H
(Ω).
k qk
`+1 |q|
• (APL ): kq − P0,h
0,Ω 6 Ch
`+1,Ω , 1 6 ` 6 k for each q in
`+1
H
(Ω).
We split the time interval [0, T ] uniformly into t0 = 0, t1 = ∆t, ..., tN =
N∆t = T with timestep ∆t and for simplicity we will use from now on
the notation Φn := Φ(tn ). We use a backward Euler finite difference
approximation for the time derivatives:
un − un−1
=: D∆t un ,
∆t
which gives the following fully discrete formulation proposed in [50]
n−1 n−1 n−1
with a different order of test spaces: Given (vn−1
, ys,h , vs,h )
f,h , ph
n
n
n
n
in Xh , find (vf,h , ph , ys,h , vs,h ) in Xh such that
∂t u(tn ) ≈
∗
n
∗
∗
(D∆t vn
f,h , vf,h )ρf φ + af (vf,h , vf,h ) − (ph , div(φvf,h ))
∗
∗
+ c(vf,h − vn
s,h , vf,h ) = (f, vf,h )ρf φ ,
n
n
(D∆t pn
h , qh ) (1−φ)2 + (qh , div(φvf,h + (1 − φ)vs,h )) = (θ, qh ) 1 ,
κs
ρf
n
n
(D∆t vn
s,h , ws,h )ρs (1−φ) + as (ys,h , ws,h ) − (ph , div((1 − φ)ws,h ))
n
− c(vn
f,h − vs,h , ws,h ) = (f, ws,h )ρs (1−φ) ,
∗
n
∗
as (D∆t yn
s,h , vs,h ) − as (vs,h , vs,h ) = 0,
(38)
42
linearized poromechanics
for all v∗f,h ∈ Vf,h , qh ∈ Qp,h , ws,h ∈ Vs,h , v∗s,h ∈ Qv,h , and where
af (vf,h , v∗f,h ) = (σf (vf,h ), ε(v∗f,h )) − (θvf,h , v∗f,h ),
as (ys,h , ws,h ) = (σs (ys,h ), ε(ws,h )),
c(a, b) = (φ2 κ−1
f a, b),
(a, b)ζ = (ζa, b).
A fully implicit (Backward Euler) time discretization is an adequate
choice for the parabolic part of the problem, namely the momentum
equation of the fluid phase and the mass balance equation. However,
it might not be appropriate for the momentum equation of the solid
phase, as it violates the intrinsic energy conservation property of elastodynamics. In this respect, other approaches may be adopted for the
solid phase, such as the classical Newmark scheme or a mid-point
rule as in [49, 93].
Remark. The equation D∆t ys,h = vs,h has been weakly enforced using the
bilinear form as . This was also done in [50] and presents advantages during
the error analysis with the cost of requiring a higher order of approximation
and higher regularity assumptions for the solid velocity. The error analysis
can also be carried out for the L2 inner product for the solid velocity with
the strategy we use in what follows, but the convergence rates obtained that
way are suboptimal.
We start by showing that problem (38) is well-posed.
n n
n
Lemma 9. For every n > 1, there exists a unique solution (vn
f,h , ph , ys,h , vs,h )
in Xh of problem (38).
n n
n
Proof. Consider the test function x∗h = (vn
f,h , ph , vs,h , ys,h ) and denote
the right hand side generically as F(v∗f,h , qh , ws,h , v∗s,h ), which gives
2
n 2
∆t−1 (kvn
f,h kρf φ + kph k(1−φ)2 /κ
s
2
+ kvn
s,h kρs (1−φ)
2
n
n
+ kyn
s,h kas ) + af (vf,h , vf,h )
n n
n
6 F(vn
f,h , ph , vs,h , ys,h ).
First note that if F = 0, then the only solution is xh = 0. We can then
conclude from the discrete Fredholm Alternative Theorem that the son n
n
lution is unique. The same inequality gives that (vn
f,h , ph , ys,h , vs,h )
k+1 d
belongs to Vf,h × Qp,h × Vs,h × (L2 (Ω) ∩ {vn
s,h |∂Ω = 0} ∩ [Xh ] ). Finally the last equation gives
as (vn
s,h , ws,h )
sup
ws,h ∈Vs,h kws,h kH1 (Ω)
q
−as (D∆t yn
s,h , ws,h )
n
= as (D∆t yn
s,h , D∆t ys,h ),
kws,h kH1 (Ω)
q
n
as (vn
s,h , vs,h ) =
=
sup
ws,h ∈Vs,h
which gives vn
s,h in Qv,h .
3.4 error analysis of a fully discrete formulation
43
We will use the discrete Gronwall Lemma, which we recall for reference [156].
Lemma 10 (Discrete Gronwall Lemma). Consider g0 > 0 and a sequence
∞
(pn )∞
n=0 such that pn > 0. If (fn )n=0 is such that
f0 6 g 0
and
fn 6 g 0 +
n−1
X
ps +
s=0
then
fn 6
g0 +
n−1
X
!
ps
exp
n−1
X
k s fs ,
s=0
n−1
X
s=0
!
ks
.
s=0
We also make use of the following tools for the analysis of the
approximation properties in time.
Lemma 11. For any symmetric bilinear form b:
1
1
b(ϕn , D∆t ϕn ) = D∆t b(ϕn , ϕn ) + ∆t b(D∆t ϕn , D∆t ϕn ). (39)
2
2
Lemma 12. The following inequality holds for a backwards difference approximation in a Hilbert space H:
kD∆t ϕ − ∂t ϕk`∞ (0,T ;H) 6 ∆tk∂tt ϕkL∞ (0,T ;H)
∀ϕ ∈ W 2,∞ (0, T ; H).
R tn
1
Proof. The Fundamental Theorem of Calculus gives D∆t ϕn = ∆t
tn−1 ∂t ϕ(s) ds,
R
R
and so using the monotonicity of the integral k I · drkH 6 I k · kH dr
we obtain:
n
kD∆t ϕ
Z tn
− ∂t ϕn k2H
1
=k
∆t
Z tn
tn−1
(∂t ϕ(s) − ∂t ϕn ) dsk2H
2
1
k∂t ϕ(s) − ∂t ϕn kH ds
tn−1 ∆t
2
Z
Z tn
1 tn
∂tt ϕ(r) dr
ds
=
∆t tn−1 s
H
2
Z
Z tn
1 tn
k∂tt ϕ(r)kH drds
6
∆t tn−1 s
k∂tt ϕkL∞ (tn−1 ,tn ;H) 2 2
6
∆t
∆t
6
6 ∆t2 k∂tt ϕk2L∞ (0,T ;H) .
Taking the supremum on n and square root gives the conclusion.
Corollary 2. Consider two Hilbert spaces Z ⊂ H and an interpolation
operator Ih : H → Hh into a conforming discretization Hh such that
kϕ − Ih ϕkH 6 Chk kϕkZ ,
44
linearized poromechanics
then it holds that
kD∆t Ih ϕ − ∂t ϕk`∞ (0,T ;H)
6 max{CkϕkL∞ (0,T ;Z) , k∂tt ϕkL∞ (0,T ;H) }(hk + ∆t)
∀ϕ ∈ W 2,∞ (0, T ; H).
Proof. It follows directly from Lemma 12 and the decomposition ∂t ϕ −
D∆t Ih ϕ = ∂t ϕ − D∆t ϕ + D∆t ϕ − D∆t Ih ϕ.
We then write problem (7) as finding x = (vf , p, ys , vs ) in X such
that
E(∂t x, x∗ ) + H(x, x∗ ) = F(x∗ )
∀x∗ := (v∗f , q, ws , v∗s ) ∈ X,
(40)
where in analogy with the notation used in Section 3.2.1 we define
the bilinear forms
E(∂t x, x∗ ) := (∂t vf , v∗f )ρf φ + (∂t p, q)(1−φ)2 /κs
+ (∂t vs , ws )ρs (1−φ) + as (∂t ys , v∗s ),
H(x, x∗ ) := af (vf , v∗f ) + as (ys , ws ) − as (vs , v∗s )ρs (1−φ)
+ c(vf − vs , v∗f − ws )
− (p, div(φv∗f + (1 − φ)ws ))
+ (q, div(φvf + (1 − φ)vs )),
and set its discrete counterpart as: Given xn−1
in Xh , find xn
h =
h
n
n
n
n
(vf,h , ph , ys,h , vs,h ) in Xh such that
∗
n ∗
∗
E(D∆t xn
h , xh ) + H(xh , xh ) = F(xh )
∀x∗h := (v∗f,h , qh , ws,h , v∗s,h ) ∈ Xh .
(41)
We proceed by showing the invertibility of H, for which we add
the following hypothesis, recalling that the bilinear form c(·, ·) =
(φ2 κ−1
f ·, ·):
(H4) The permeability tensor κf is large enough:
∃Csk : as (ws , ws ) − c(ws , ws )
> Csk kws k2H1 (Ω)
∀ws ∈ H10 (Ω).
Theorem 5. Under assumptions (H1), (H2), (H3) and (H4) it holds that
the problem of finding xh in Xh such that
H(xh , x∗h ) = F(x∗h )
∀x∗h ∈ Xh
is well-posed for every F in Xh0 . Moreover, if x̃ is the function such that
H(x̃, x∗ ) = F(x∗ )
∀x∗ ∈ X,
then, defining Z = Hk+2 (Ω) × Hk+1 (Ω) × Hk+2 (Ω) × Hk+2 (Ω), the
following holds for a positive problem dependent constant C:
kx̃ − xh kX 6 Chk+1 kx̃kZ .
3.4 error analysis of a fully discrete formulation
45
Proof. Let Vh = Vf,h × Vs,h × Qv,h and Qh = Qp,h with bilinear forms
A((vf,h , ys,h , vs,h ), (v∗f,h , ws,h , v∗s,h )) = as (vf,h , v∗f,h ) + as (ys,h , ws,h )
+ as (vs,h , v∗s,h )
+ c(vf,h − vs,h , v∗f,h − ws,h ),
B1 ((v∗f,h , ws,h , v∗s,h ), qh ) = (qh , div(φv∗f,h + (1 − φ)ws,h )),
B2 ((v∗f,h , ws,h , v∗s,h ), qh ) = (qh , div(φv∗f,h + (1 − φ)vs,h )).
Note that, using Young’s inequality we obtain the following:
c(vf,h − vs,h , vf,h − ws,h ) = c(vf,h , vf,h ) − c(vf,h , ws,h )
− c(vs,h , vf,h ) + c(vs,h , ws,h )
> c(vf,h , vf,h )
1
− (c(vf,h , vf,h ) + c(ws,h , ws,h ) + c(vf,h , vf,h )
2
+c(vs,h , vs,h ) + c(vs,h , vs,h ) + c(ws,h , ws,h ))
> −c(vs,h , vs,h ) − c(ws,h , ws,h ),
which combined with hypothesis (H4) shows that A is elliptic, and
forms B1 and B2 satisfy the hypothesis of Theorem 14 in virtue of
Theorem 8. The conclusion comes then from Theorem 14 and the
approximation properties (APH,1 ), (APH,0 ), (APL ).
We are now ready to address the error estimate for the fully discrete
model (38). To this purpose we use the decomposition of the numerical error into the approximation error, denoted with χ, and the remaining truncation error, denoted with ϕ, as follows:
n
en
f = vf (tn ) − vf,h
= vf (tn ) − If,h vf (tn ) + If,h vf (tn ) − vn
f,h
n
n
= χf + ϕf,h ,
n
en
p = p(tn ) − ph
= p(tn ) − Ip,h p(tn ) + Ip,h p(tn ) − pn
h
n
= χn
p + ϕp,h ,
n
n
en
s = ys (tn ) − ys,h = ys (tn ) − If,h ys (tn ) + If,h ys (tn ) − ys,h
n
= χn
s + ϕs,h ,
n
en
v = vs (tn ) − vs,h
= vs (tn ) − If,h vs (tn ) + If,h vs (tn ) − vn
s,h
n
= χn
v + ϕv,h ,
∂ξ(tn )
, for ξ ∈ {vf , p, ys , vs },
∂t
where all quantities are analogously defined as in the fluid case, with
interpolators If,h , Ip,h , Is,h , Iv,h defined as follows. Set the Ritz projection ΠH
h : X → Xh as:
δ∆t ξn = D∆t Iξ,h ξ(tn ) −
∗
∗
H(ΠH
h x, xh ) = H(x, xh )
∀x∗h ∈ Xh ,
46
linearized poromechanics
which is well defined in virtue of Theorem 5, then the interpolation
operators are defined as
(If,h vf (tn ), Ip,h p(tn ), Is,h ys (tn ), Iv,h vs (tn ))
:= ΠH
h (vf (tn ), p(tn ), ys (tn ), vs (tn )).
With these definitions we have the following corollary of Theorem 5,
for which we recall that X = H10 (Ω) × L20 (Ω) × H10 (Ω) × H10 (Ω) and
Z = Hk+2 (Ω) × Hk+1 (Ω) × Hk+2 (Ω) × Hk+2 (Ω).
Corollary 3. If x ∈ W 2,∞ (0, T ; X) ∩ L∞ (0, T ; Z), then the following estimate holds for a problem dependent constant C:
n
kD∆t ΠH
h x − ∂t xk`∞ (0,T ;X)
6 C max{k∂tt xkL∞ (0,T ;X) , kxkL∞ (0,T ;Z) } hk+1 + ∆t .
Proof. This is a direct application of Corollary 2 to the Ritz projector
ΠH
h.
Then our strategy to perform the error analysis can be split into the
following steps: (i) Derive equations for the numerical error by subtracting the fully discrete model from the continuous model, (ii) split
the error into the approximation and truncation errors, (iii) use the
orthogonality properties of the projector ΠH
h in order to eliminate the
approximation error from the equations and (iv) recover an upper
bound for the total error by triangle inequality and approximation
properties. We proceed according to the described roadmap.
(i) Consider in (40) the test function x∗ = x∗h and then take the differn n n
ence with (41) to obtain the error equation. With ex = (en
f , e p , es , ev )
we obtain:
∗
∗
E(∂t x − D∆t xn
h , xh ) + H(ex , xh ) = 0
∀x∗h ∈ Xh .
(42)
χn χn χn χn
(ii) In accordance with our definitions we consider χn
x = ( f , p, s , v )
n
n
n
and ϕx,h = (ϕn
f,h , ϕp,h , ϕs,h , ϕv,h ). Note that the time error can be
written as
H
H
n
∂t x − D∆t xn
h = ∂t x − D∆t Πh x + D∆t Πh x − D∆t xh = D∆t ϕx,h − δ∆t x,
and so we can rewrite the error equation (42) as
∗
∗
n ∗
E(D∆t ϕx,h , x∗h ) + H(χn
x , xh ) + H(ϕx,h , xh ) = E(δ∆t x , xh )
∀x∗h ∈ Xh .
(43)
(iii) By definition we have that H(χx , x∗h ) = 0, which gives an expression more suitable for the analysis:
E(D∆t ϕx,h , x∗h ) + H(ϕx,h , x∗h ) = E(δ∆t xn , x∗h ).
(44)
From here we can obtain an error estimate for the truncation error,
which we give in the following lemma.
3.4 error analysis of a fully discrete formulation
47
Lemma 13. Assume that vf , ys , vs in W 2,∞ (0, T ; Hk+2 (Ω)) and p in W 2,∞ (0, T ; Hk+1 (Ω))
as well hypotheses (H1), (H2), (H3) and (H4). Then, there exists a constant
C > 0, possibly dependent on the problem parameters, such that:
kϕf,h k`∞ (L2 (Ω)) + kϕp,h k`∞ (L2 (Ω))
+ kϕv,h k`∞ (L2 (Ω)) + kϕs,h k`∞ (H1 (Ω))
+ ∆t(kϕf,h k`2 (H1 (Ω)) + cc kϕf,h − ϕv,h k`2 (L2 (Ω)) )
6 CT eT max{k∂tt xkL∞ (0,T ;X) , kxkL∞ (0,T ;Z) }(hk+1 + ∆t). (45)
Proof. The test function x∗h = ϕx,h in (44) yields
n
n
n
n
n
(D∆t ϕn
f,h , ϕf,h )ρf φ + (D∆t ϕp,h , ϕp,h )(1−φ)2 /κs + (D∆t ϕv,h , ϕv,h )ρs (1−φ)
n
n
n
n
n
+ as (D∆t ϕn
s,h , ϕs,h ) + af (ϕf,h , ϕf,h ) + as (ϕs,h , ϕv,h )
n
n
n
n
n
+ c(ϕn
f,h − ϕv,h , ϕf,h − ϕv,h ) − as (ϕv,h , ϕs,h )
n
n
n
6 (δ∆t vn
f,h , ϕf,h )ρf φ + (δ∆t p , ϕp,h )(1−φ)2 /κs
n
n
n
+ (δ∆t vn
s,h , ϕv,h )ρs (1−φ) + (δ∆t ys,h , ϕs,h )ρs (1−φ) .
We define
n 2
n
2
n
2
n
2
En
h = kϕf,h kρf φ + kϕp,h k(1−φ)n /κs + kϕv,h k(1−φ)ρs + kϕs,h kas ,
kvk2af = af (v, v),
kvk2as = as (v, v),
and proceed by using the positivity of c as c(x, x) > αc kxk20,Ω , (39)
and Corollary 3 to obtain that
n 2
n
n
2
D∆t En
h + kϕf,h kaf + αc kϕf,h − ϕv,h kL2 (Ω)
2
n
2
+ ∆t(kD∆t ϕn
f,h kρf φ + kD∆t ϕp,h k(1−φ)2 /κ
s
2
n
2
+ kD∆t ϕn
v,h kρs (1−φ) + kD∆t ϕs,h kas )
2
6 C max{k∂tt xkL∞ (0,T ;X) , kxkL∞ (0,T ;Z) }(hk+1 + ∆t)(kϕn
f,h kρf φ
n
n
+ kϕn
p,h k(1−φ)n /κs + kϕv,h k(1−φ)ρs + kϕs,h kas )
6
C2 max{k∂tt xkL∞ (0,T ;X) , kxkL∞ (0,T ;Z) }2 k+1
1
(h
+ ∆t)2 + En
,
2
2 h
(46)
where C denotes a general constant depending on the data. Now, we
bound all the norms with discrete time derivatives on (46) by 0 from
below and sum on n = 1, ..., m to get
Em
h + ∆t
m
X
2
n
n
2
(kϕn
f,h kaf + cc kϕf,h − ϕv,h kL2 (Ω) )
n=1
6
CT max{k∂tt xkL∞ (0,T ;X) , kxkL∞ (0,T ;Z) }2 k+1
(h
+ ∆t)2
2
m
X
+ ∆t
En
h,
n=1
48
linearized poromechanics
and thus Lemma 10 (the discrete Gronwall Lemma), gives, for ∆t <
0.5:
X
1 m
2
n
n
2
Eh + ∆t
(kϕn
f,h kaf + cc kϕf,h − ϕv,h kL2 (Ω) )
2
m
n=1
C max{k∂tt xkL∞ (0,T ;X) , kxkL∞ (0,T ;Z) }2 T k+1
(h
+ ∆t)2 eT .
2
Rearranging terms and using norm equivalences as in Lemma 6 gives
the desired result:
6
kϕf,h k`∞ (L2 (Ω)) + kϕp,h k`∞ (L2 (Ω)) + kϕv,h k`∞ (L2 (Ω)) + kϕs,h k`∞ (H1 (Ω))
+ ∆t(kϕf,h k`2 (H1 (Ω)) + kϕf,h − ϕv,h k`2 (L2 (Ω)) )
6 CT eT max{k∂tt xkL∞ (0,T ;X) , kxkL∞ (0,T ;Z) }(hk+1 + ∆t).
(iv) We conclude this section with the full error estimate.
Theorem 6. Assume that x ∈ W 2,∞ (0, T ; X) ∩ L∞ (0, T ; Z) as well as hypotheses (H1), (H2), (H3) and (H4). Then, there exists a constant C(T ) > 0,
possibly dependent on the problem parameters, such that:
kef k`∞ (L2 (Ω)) + kep k`∞ (L2 (Ω)) + kev k`∞ (L2 (Ω)) + kes k`∞ (H1 (Ω))
+ ∆t(kef k`2 (H1 (Ω)) + cc kef − ev k`2 (L2 (Ω)) )
6 C(T ) max{k∂tt xkL∞ (0,T ;X) , kxkL∞ (0,T ;Z) }(hk+1 + ∆t).
Proof. By definition from Corollary 3 we get the error estimate of the
projector ΠH
h , and thus setting again a generic parameter dependent
constant C we can write
kχx kL2 = kχf kL2 (Ω) + kχp kL2 (Ω) + kχs kL2 (Ω) + kχv kL2 (Ω)
6 kχf kH1 (Ω) + kχp kL2 (Ω) + kχs kH1 (Ω) + kχv kL2 (Ω) 6 C hk+1 kxkZ
(47)
almost everywhere in t. The triangle inequality together with (47)
give the conclusion as follows:
kef k`∞ (L2 (Ω)) + kep k`∞ (L2 (Ω)) + kev k`∞ (L2 (Ω)) + kes k`∞ (H1 (Ω))
+ ∆t(kef k`2 (H1 (Ω)) + kef − ev k`2 (L2 (Ω)) )
6 kϕf,h k`∞ (L2 (Ω)) + kϕp,h k`∞ (L2 (Ω)) + kϕv,h k`∞ (L2 (Ω))
+ kϕs,h k`∞ (H1 (Ω)) + ∆t(kϕf,h k`2 (H1 (Ω)) + kϕf,h − ϕv,h k`2 (L2 (Ω)) )
+ C(kχf kH1 (Ω) + kχp kL2 (Ω) + kχs kH1 (Ω) + kχv kL2 (Ω) )
6 C(T ) max{k∂tt xkL∞ (0,T ;X) , kxkL∞ (0,T ;Z) }(hk+1 + ∆t)
+ Chk+1 kxkL∞ (0,T ;Z)
6 C(T ) max{k∂tt xkL∞ (0,T ;X) , kxkL∞ (0,T ;Z) }(hk+1 + ∆t). (48)
3.5 the inf-sup condition
3.4.1
Numerical tests
We now set up numerical tests for estimating the rates of convergence.
For this, we consider the time domain I = (0, 1), the spatial domain
Ω = (0, 1)2 and the following idealized parameters:
ρf = 1,
µs = 10,
κ−1
f = I,
λs = 10,
µf = 10,
ρs = 1,
κs = 1,
φ = 0.1.
For simplicity, we assume that the forcing terms on the fluid and
solid equations are different, respectively ff and fs , so that fixing a
displacement, fluid velocity and pressure we recover a source θ and
the load terms ff , fs . We thus set the Dirichlet boundary conditions
according to the following manufactured analytical solution:
ys (t, x, y) = t2 (0.5x3 cos(4πy), −x3 sin(4πy)),
vs (t, x, y) = 2 t(0.5x3 cos(4πy), −x3 sin(4πy)),
vf (t, x, y) = t2 (sin2 (4πy), sin2 (4πy)),
p(t, x, y) = t2 (1 − sin(4πx) sin(4πy)) ,
Using such solution, which satisfies all the regularity requirements
of the convergence theorem, we perform numerical tests in support
of the theory using a polynomial order of k = 1. As a result, vf , ys
and vs belong to [X2h ]2 , whereas the pressure belongs to X1h . These
tests are designed to test the convergence with respect to ∆t and h,
independently. First, choosing a very small ∆t, we progressively decrease the mesh characteristic size such that the space approximation
error dominates over the one on time as shown in Table 1. Then, for a
fixed small value of h, namely using a very refined mesh, we test the
convergence in time as shown in Table 2.
3.5
the inf-sup condition
Lemma 4 shows that the existence, uniqueness and stability of the discrete solution depend on the fulfillment of condition ker B T ∩ ker C =
{0}, where matrix C is related to the term
(1 − φ)2
∂t ph , qh
κs
and matrix B is related to
b((v∗f , ws ), q) = −(q, div(φv∗f ) + div((1 − φ)ws )).
As already mentioned in Remark 3.2.1, the coefficient κs is often very
large. For this reason, the stability of the numerical scheme hinges, in
practice, around the term b((v∗f , ws ), q). This implies that an inf-sup
49
50
linearized poromechanics
dofs
h
kes k`∞ (H1 )
rates
kev k`∞ (H1 )
ratev
1063
2.357e-01
6.742e-03
–
1.363e-01
–
2266
1.571e-01
3.089e-03
1.92
6.210e-02
1.94
4570
1.088e-01
1.500e-03
1.96
3.005e-02
1.97
10527
7.071e-02
6.428e-04
1.97
1.286e-02
1.97
23287
4.714e-02
2.965e-04
1.91
5.939e-03
1.91
dofs
h
kef k`∞ (H1 )
ratef
kep k`∞ (L2 )
ratep
1063
2.357e-01
6.614e-02
–
2.536e-03
–
2266
1.571e-01
3.296e-02
1.72
1.128e-03
2
4570
1.088e-01
1.662e-02
1.86
4.707e-04
2.38
10527
7.071e-02
7.231e-03
1.93
1.819e-04
2.21
23287
4.714e-02
3.262e-03
1.96
8.291e-05
1.94
Table 1: Errors and convergence rates for problem (38) with T = 1 and ∆t =
10−4 ; dofs stands for degrees of freedom.
condition involving the discrete spaces Vf,h , Vs,h , Qp,h must be satisfied. The scope of this section is to analyse the inf-sup stability of the
bilinear form b. Such form corresponds to a weak divergence operator with weights that depend on the function φ, that is the porosity
of the material. The main question that we address here is what conditions must be satisfied by the discrete spaces Vf,h , Vs,h , given Qp,h ,
in different regimes of porosity, namely when φ is approaching the
limit cases φ ≈ 1 and φ ≈ 0 respectively. The practical relevance of
this question is confirmed by Figure 5, where we see that locking appears nearly in absence of the solid or fluid phase (φ ≈ 1 and φ ≈ 0
respectively).
We divide the work in two parts, first operating at the continuous level we generalize the classical div-stability to weighted Sobolev
spaces (with an H1 weight function) and then use this intermediate
result to conclude with the inf-sup stability of the form b reported
above. Second, we move at the discrete level where we prove the infsup condition for the specific case of the generalized Taylor-Hoodtype elements.
3.5.1
The weighted inf-sup condition
In this section, we study the weighted inf-sup condition for b(vf , q) =
(q, div(ωvf )), which is a generalized form of the classical inf-sup condition for the divergence operator. Also, from now on we will consider a general function ω such that ω > ω > 0 and both ω, 1/ω
belong to W s,r (Ω) with s > d/r and r > 1. The result at the con-
3.5 the inf-sup condition
(a) Fluid P1 ,
βh = C.
P2 , (b) Fluid P2 ,
βh ≈ 0.
solid
P1 , (c) Fluid P2 ,
βh = C.
solid
P2 ,
(d) Fluid P1 , solid P2 , (e) Fluid P2 ,
βh ≈ 0.
βh = C.
solid
P1 , (f) Fluid P2 ,
βh = C.
solid
P2 ,
solid P2 , (h) Fluid P2 , solid P1 , (i) Fluid P2 ,
βh = C.
βh = C.
solid
P2 ,
(g) Fluid P1 ,
βh ≈ 0.
solid
Figure 5: Comparison of the pressure in a swelling test at T = 1.5. First
row on a solid dominant regime (φ = 10−8 ), second row on a
mixed regime (φ = 0.5) and third row on a fluid dominant regime
(φ = 1 − 10−4 ). All tests are performed with P1 elements for the
pressure. See Section 3.6.1 for a detailed description of the test
case.
51
52
linearized poromechanics
∆t
kes k`∞ (H1 )
rates
kev k`∞ (H1 )
ratev
1.000e-03
3.614e-05
–
6.510e-03
–
5.000e-04
1.862e-05
0.957
3.376e-03
0.947
2.500e-04
9.468e-06
0.976
1.729e-03
0.965
1.250e-04
4.793e-06
0.982
8.822e-04
0.971
∆t
kef k`∞ (H1 )
ratef
kep k`∞ (L2 )
ratep
1.000e-03
2.363e-04
–
4.751e-05
–
5.000e-04
1.214e-04
0.961
2.427e-05
0.969
2.500e-04
6.171e-05
0.976
1.227e-05
0.984
1.250e-04
3.148e-05
0.971
6.172e-06
0.991
Table 2: Errors convergence rates for problem (38) for a fixed structured
mesh with 70 elements per side yielding 124 327 dofs.
tinuous level requires first a preliminary lemma regarding weighted
Sobolev spaces.
Lemma 14. If both ω and 1/ω belong to W s,r (Ω) with s > d/r and r > 1,
then the application v → ωv is a bijection in H1 (Ω) and the following
bounds hold:
1
kvkH1 (Ω) 6 kωvkH1 (Ω) 6 Cbij kωkW s,r (Ω) kvkH1 (Ω)
Cbij kω−1 kW s,r (Ω)
(49)
for a positive constant Cbij .
Proof. A direct application of the Sobolev product Theorem [84, Theorem 1.4.4.2] gives that both ωv and ω−1 v belong to H1 (Ω) and satisfy
the inequalities
kωvkH1 (Ω) 6 Cbij kωkW s,r (Ω) kvkH1 (Ω) ,
and
kvkH1 (Ω) 6 Cbij kω−1 kW s,r (Ω) kωvkH1 (Ω) ,
for a positive constant Cbij , which states the result.
Remark. The hypothesis ω, 1/ω in W s,r (Ω) implies that ω is strictly
positive.
The weighted inf-sup condition at the continuous level is then a
direct consequence of the isomorphism ωv → v in H1 (Ω).
Lemma 15. There exists a positive constant β which satisfies the following:
R
sup
v∈H10 (Ω)
v6=0
Ω q div(ωv)
kvk1,Ω
> βkqk0,Ω
∀q ∈ L20 (Ω).
(50)
3.5 the inf-sup condition
Proof. Using Lemma 14, we proceed as follows:
R
R
− Ω q div(v)
− Ω q div(ωv)
= sup
sup
kvkH1 (Ω)
kω−1 vkH1 (Ω)
v∈H1 (Ω),
v∈H1 (Ω),
0
0
v6=0
v6=0
1
>
−1
Cbij kω kW s,r (Ω)
sup
v∈H10 (Ω),
v6=0
−
R
Ω q div(v)
kvkH1 (Ω)
,
which proves the statement.
Now we address the discrete version of the inf-sup condition, recalling that it is not a consequence of the continuous one even though
we are using conforming finite dimensional spaces. Let us define the
following spaces:
d
Vk = H10 (Ω) ∩ [Xk
h] ,
Qk = L20 (Ω) ∩ Xk
h.
Our aim is to extend the proof in [31] and [32], see also [33] for an
overview, for the 2D and 3D cases respectively developed for ω = 1
by means of the macroelements technique, where a modified inf-sup
condition at the element level will be used together with Verfürth’s
trick [185] and an inverse estimate to conclude the global statement.
We highlight that although we do not address the approximation of
ω by means of finite elements, all the forecoming analysis holds as
long as its approximation is still in W s,r (Ω) and strictly positive.
We start with a brief review of the relevant results from the macroelements technique [172]. A macroelement M is defined as a union of
continuous elements on the mesh, and for each one of its elements
there is an affine map which maps it into an element of a reference
macroelement. All macroelements which can be mapped into one particular reference macroelement form an equivalence class. Let Mh be
a macroelement partition of the mesh Th , which is assumed to be
shape regular [156, Chapter 3.1]. For M in Mh we denote
1
VM
k+1,0 = Vk+1 ∩ H0 (M),
QM
k = {q|M : q ∈ Qk },
Z
M
QM
=
q
∈
Q
:
q div(ωv) = 0
k
k,⊥
M
∀v ∈ VM
k+1,0 .
We now focus on proving the following result.
Theorem 7. Let Mh be a macroelement partition of the (shape regular) mesh
Th such that
(HM ) for each M in Mh , the space QM
k,⊥ is one dimensional given by constant functions.
Then, there exists a positive constant β = β(ω) such that:
R
Ω qh div(ωvh )
sup
> βkqh k0,Ω ∀qh ∈ Qk .
kvh k1,Ω
vh ∈Vk+1
vh 6=0
(51)
53
54
linearized poromechanics
Remark. We have simplified the original theorem by removing some hypotheses regarding the macroelements partition. These hold under the standard assumption of shape regularity of the mesh, so we removed them for the
sake of clarity (see [172] for details).
In order to prove this theorem, we need the following lemmas. This
first one allows us to extend an inf-sup condition from the macroelement level to the global level.
Lemma 16. Let Ω = Ω1 ∪ Ω2 and for i = 1, 2 set Vk (Ωi ) = {vh ∈ Vk :
vh = 0 in Ω \ Ωi }. Suppose also that the following conditions hold for the
previously defined weight function ω:
R
Ωi div(ωvi )qh dx
sup
> βi kqh kL2 (Ωi ) , ∀qh ∈ Qk , i ∈ {1, 2}.
kvi kH1 (Ωi )
vi ∈Vk+1 (Ωi )
vi 6=0
Then, the following global condition also holds:
R
Ω div(ωvh )qh dx
sup
> βkqh k0,Ω ,
kvh k1,Ω
vh ∈Vk+1 (Ω)
∀qh ∈ Qk ,
vh 6=0
√
where β = 1/ 2 min(β1 , β2 ). If Ω1 ∩ Ω2 = ∅, then β = min(β1 , β2 ).
Proof. We adapt the proof from [31, Proposition 3.1]. Consider qh in
Qk . By hypothesis there exist, for i = 1, 2, vi in Vk+1 (Ωi ) such that
Z
1
div(ωvi )qh dx > kqh k2L2 (Ωi ) , kvi kH1 (Ω) 6
kqh kL2 (Ω) .
βi
Ωi
From here we have that, defining vh = v1 + v2 by appropriately extending the functions through mollification,
Z
Z
div(ωvh )qh dx =
Ω
Z
div(ωv1 )qh dx +
Ω1
div(ωv2 )qh dx
Ω2
> kqh k2L2 (Ω1 ) + kqh kL2 (Ω2 ) > kqh k2L2 (Ω) ,
and
kvh k2H1 (Ω) 6 kv1 k2H1 (Ω1 ) + kv2 k2H1 (Ω2 )
1
1
6
kqh k2L2 (Ω1 ) +
kqh k2L2 (Ω2 ) 6 2 max
β1
β2
1 1
,
β1 β2
kqh k2L2 (Ω) .
If Ω1 ∩ Ω2 are disjoint, we can drop the 2 from the last inequality,
thus proving the statement.
We then show that at the macroelement level, the inf-sup condition
is satisfied for the space of constants.
3.5 the inf-sup condition
Lemma 17. Let EM̂ be a class of equivalent macroelements and assume that
for every M the space QM
k,⊥ satisfies (HM ) of Theorem 7. Then there exists
a positive constant βM̂ which depends only on the reference macroelement
and the mesh regularity such that the following inequality holds:
R
2
M qh div(ωvh )
sup
> βM̂ kqh k0,M ∀qh ∈ QM
k ∩ L0 (M).
kv
k
h 1,M
v ∈VM
h
k+1,0
vh 6=0
Proof. See [172, Lemma 3.1].
We finally show that if functions which are constant at the macroelement are removed from the pressure space, the inf-sup condition
holds. Defining Π0 : L2 (Ω) → {q ∈ L2 (Ω) : q|M is constant ∀M ∈
Mh } the orthogonal projector with respect to the scalar product of
L2 (Ω) we get the following result.
Lemma 18. Under hypothesis (HM ) of Theorem 7, there exists a positive
constant c such that
b(qh , vh )
> ck(I − Π0 )qh kL2 (Ω) .
kvh kH1 (Ω)
(52)
Proof. For every qh in Qk we have that (I − Π0 )qh
belongs to
inf
sup
qh ∈Qk v ∈V
h
k+1
L20 (M). Thanks to Lemma 17, there exists vM in
M such that
M
VM
k+1,0
((I − Π0 )qh , div(ωvM ))M > C1 k(I − Π0 )qh k2L2 (M)
for every
and
kvM kH1 (M) 6 k(I − Π0 )qh kL2 (M) ,
where C = mini (βM̂i ), the constants defined as in Lemma 17. Finally
we note that as vM = 0 on ∂M , we have due to integration by parts
that
(Π0 qh , div(ϕvM )) = 0,
which together with the previous estimate and Lemma 16 states the
result.
Now we proceed with Verfürth’s trick [185]. We generalize it in the
following lemma, which requires the definition of the L2 projector
Π0 : Qk → Q0,h , the last space given by the space of macroelementwise constants:
Q0,h = {q ∈ L20 (Ω) : q|M is constant ∀M ∈ Mh }.
Lemma 19. Assume that there exists a linear operator Πh : H10 (Ω) → Vk
such that for every v in H10 (Ω) there is a positive constant c which satisfies
kv − Πh vkHr (Ω) 6 c
1/2
X 2(1−r)
,
hK
kvk2H1 (K)
K∈Th
r ∈ {0, 1}. (53)
55
56
linearized poromechanics
Then, there exist two positive constants c1 , c2 such that for every qh in Qh
the following holds:
sup
vh ∈Vk+1
vh 6=0
(div(ωvh ), qh )
c1
>
kqh kL2 (Ω)
−1
kvh kH1 (Ω)
kω kW s,r (Ω)
− c2
kωkW s,r (Ω)
k(I − Π0 )qh kL2 (Ω) .
kω−1 kW s,r (Ω)
(54)
Proof. We use kΠh vk 6 kvk + kv − Πh vk with (53) to bound the infsup condition from below:
sup
vh ∈Vk+1
vh 6=0
(div(ωvh ), qh )
(div(ωΠh v), qh )
> sup
kvh kH1 (Ω)
kΠh vkH1 (Ω)
v∈H1 (Ω)
0
Πh v6=0
>
(div(ωΠh v), qh )
.
(1 + c)kvkH1 (Ω)
v∈H1 (Ω)
sup
0
Πh v6=0
Then, we define v such that div(ωv) = qh ,
kvkH1 (Ω) 6 Ckω−1 kW s,r (Ω) kqh kL2 (Ω)
and proceed with integration by parts, hypothesis (53) and CauchySchwarz inequality:
(div(ωΠh v), qh )
(1 + c)kvk1,Ω
v∈H1 (Ω)
sup
0
Πh v6=0
>
kqh k0,Ω
(div(ω[Πh v − v]), qh )
+
−1
(1 + c)kω kW s,r (Ω) Ckω−1 kW s,r (Ω) kqh k0,Ω
(ω[Πh v − v], ∇qh )
kqh k0,Ω
−
−1
(1 + c)kω kW s,r (Ω) Ckω−1 kW s,r (Ω) kqh k0,Ω
P
ckωkW s,r (Ω) kvk1,Ω K∈Th hK k∇qh k0,K
kqh k0,Ω
>
−
(1 + c)kω−1 kW s,r (Ω)
Ckω−1 kW s,r (Ω) kqh k0,Ω
P
ckωkW s,r (Ω) K∈Th hK k∇qh k0,K
kqh k0,Ω
>
−
.
(1 + c)kω−1 k0,Ω
Ckω−1 kW s,r (Ω)
>
We now use the inverse inequality [156, Proposition 6.3.2]:
hK k∇wh k0,K 6 Ckwh k0,K
∀wh ∈ Pk (K),
which, considering wh = qh − Π0 qh and setting h = maxK hK gives
the desired result.
Then, we are ready to prove Theorem 7.
3.5 the inf-sup condition
Proof of macroelement condition (Theorem 7). We first note that hypothesis (53) holds by considering the interpolation operator in Vk+1 , so
we set Πh = ΠVk+1 . Then, consider the weak inf-sup from Lemmas 18
and 19. Adding (52) and (54) we obtain
sup
vh ∈Vk+1
vh 6=0
b(vh , q)
c1 C
.
> βkqh k0,Ω , with β >
−1
kvh k1,Ω
Ckω kW s,r (Ω) + c2 kωkW s,r (Ω)
(55)
We now extend [31, Theorem 4.1], by proving that the space QM
k,⊥
is one dimensional, as required by condition (HM ) of Theorem 7.
Theorem 8. Let {Th }h be a regular family of triangulations of Ω (as in
[156, Section 3.1]), and assume that each one of them contains at least three
triangles if Ω ⊂ R2 or that every element has at least one inner vertex if
Ω ⊂ R3 . Then, for k > 1 the finite element space Vk+1 × Qk satisfies
condition (HM ) of Theorem 7.
Proof. We treat the two-dimensional and three-dimensional cases independently.
Ω ⊂ R2 : In this case the proof is performed as in [31] with minor modifications. We first modify the weight for the Legendre
polynomials, which needs to incorporate ω, thus following the
notation in the mentioned work we rewrite [31, Equation (4.2)]
as
Z0
Z
a
f(x) dµa,x = ωλa
AB λAE f(x) dxdy ∀f : [xA , 0] → R.
xA
a
The proof then follows verbatim as the original one, in which
we require the strict positivity of ω in [31, Equation (4.7)] to
conclude.
Ω ⊂ R3 : In this case we see again that the proof requires only
the strict positivity of ω in [32, Equation (2.6)].
Remark. The 3D proof is simpler but not sharp. In fact, the condition of the
inner vertex can be weakened, but a minimal mesh has not been characterized
yet as far as we know. The 2D case is instead more technical but it allows for
the characterization of a minimal mesh for inf-sup stability.
57
58
linearized poromechanics
3.5.2
The inf-sup condition for the poromechanics problem
In this section we show that the discretization based on Taylor-Hood
type finite elements is robust and stable. For this, we write approximation spaces as
1
k d
Vk
f,h = H0 (Ω) ∩ [Xh ] ,
1
k d
Vk
s,h = H0 (Ω) ∩ [Xh ] ,
2
k d
Qk
v,h = L (Ω) ∩ [Xh ] ,
2
k
Qk
p,h = L0 (Ω) ∩ Xh .
Theorem 9. Consider φ such that (H1) holds, then the bilinear form b :
kp
ks
kv
f
(Vk
f,h × Vs,h × Qv,h ) × Qp,h → R given by
b((vf,h , ws,h , vs,h ), qh )) = (qh , div(φvf,h ) + div((1 − φ)ws,h ))
satisfies the discrete inf-sup condition for a constant β = β(φ) given by
sup
(vf,h ,ys,h )∈Vkf ×Vks
b((vf,h , ys,h ), qh )
> β kqh k0,Ω
k(vf,h , ys,h )kVkf ×Vks
∀qh ∈ Qp
kp ,
(56)
whenever the fluid velocity space or the displacement space are approximated
with a degree higher than that of the pressure, i.e max{kf , ks } > kp > 1,
for every kv > 1. If both spaces present a higher degree of approximation, i.e
min{kf , ks } > kp , then the inf-sup condition is uniformly independent of
φ.
Proof. We consider three cases: div-stability in fluid/pressure, in displacement/pressure and in both fluid and displacement.
• Case kf > kp = ks .
In this case we consider ys,h = vs,h = 0 and conclude from
Theorem 7 with ω = φ and β = β(φ) as in (55). Note that
β → 0 as φ → 0, and remains otherwise constant.
• Case ks > kp = kf .
In this case we consider vf,h = vs,h = 0 and conclude from
Theorem 7 with ω = 1 − φ and β = β(1 − φ) as in (55). Note
that β → 0 as φ → 1, and remains otherwise constant.
• Case min{kf , ks } > kp .
kf
ks
In this case we consider a function zh in Vf,h
∩ Vs,h
and impose
vf,h = ws,h = zh to arrive at the well-known divergence form
which is inf-sup stable, thus giving β > C, with C independent
of φ.
3.5 the inf-sup condition
3.5.3
Computation of the inf-sup constant
In this section we study the dependence of the inf-sup constant with
respect to the porosity φ. The computation of the inf-sup constant
of the divergence operator is a difficult task that has been widely
studied by the Spectral Theory community. The point of departure
is its connection with an eigenvalue problem, initially studied by
E. and F. Cosserat [61, 62], known as the Cosserat eigenvalue problem. It has been studied for many simple geometries (see [63] and
references therein), but an efficient algorithm for computing the infsup was only recently developed [78]. We extend this approach to
our problem by recasting the computation of the inf-sup constant as
a generalized eigenvalue problem and performing numerical experiments. This eigenvalue problem depends on the isomorphism used to
map H10 (Ω) into (H10 (Ω)) 0 , and as we show, using the isomorphisms
induced by the problem better reflects instabilities seen in numerical tests (for example, Figure 5). We will make use of the following
lemma.
Lemma 20. Let H be a Hilbert space. Then, the spaces (H × H) 0 and H 0 ×
H 0 are isometric (we consider only norms of `2 type). More explicitly, if τ in
(H × H) 0 and ϕ, ψ in H 0 are such that τ = τ(ϕ, ψ), then
1
√ k(ϕ, ψ)kH 0 ×H 0 6 kτk(H×H) 0 6 k(ϕ, ψ)kH 0 ×H 0 .
2
Proof. Given ϕ, ψ in H 0 , we consider the linear application τ : H 0 ×
H 0 → (H × H) 0 given by [τ(ϕ, ψ)](x, y) = ϕ(x) + ψ(y) ∀x, y ∈ H. It
suffices to show that τ is an isomorphism. First note that
|[τ(ϕ, ψ)](x, y)| 6 k(ϕ, ψ)kH 0 ×H 0 k(x, y)kH×H ,
thus kτ(ϕ, ψ)k(H×H) 0 6 k(ϕ, ψ)kH 0 ×H 0 . For the inverse inequality we
proceed as follows:
|[τ(ϕ, ψ)](x, y)|
x,y∈H k(x, y)kH×H
kτ(ϕ, ψ)k(H×H) 0 = sup
x,y6=0
>
kϕk
if x attains the norm of ϕ,
if y attains the norm of ψ.
H0
kψkH 0
The last part gives kτ(ϕ, ψ)k2(H×H) 0 >
cludes the proof.
√1 k(ϕ, ψ)k2 0
H ×H 0 ,
2
which con-
We now proceed to construct the eigenvalue problem, for which
we consider the spaces H = H10 (Ω) and Q = L20 (Ω), and two bilinear
forms ni : H × H → R, i ∈ {1, 2} with induced operators Ni such that
Hi := (H, ni (·, ·)) is a Hilbert space and the norms induced by ni are
equivalent to the norm in H10 (Ω). These operators give the following
characterization of the dual norm.
59
60
linearized poromechanics
Lemma 21. In the previous context, for any function ϕ in W s,r (Ω) the
following equality holds:
kϕ∇qk2(H1 (Ω)) 0 = −(q, div ϕN−1
i ϕ∇q)0,Ω ,
i ∈ {1, 2}.
Proof. We use the Riesz Representation Theorem [43, Theorem 4.11]
with the explicit operators Ni , thus obtaining:
2
−1
−1
kϕ∇qk2(H1 (Ω)) 0 = kN−1
i ϕ∇qk(H,ni ) = ni (Ni ϕ∇q, Ni ϕ∇q)
−1
= hϕ ∇ q, N−1
i ϕ ∇ qiH−1 ×H1 = −(q, div ϕNi ϕ ∇ q)0,Ω .
0
Now we are in position to find the eigenvalue problem associated
to the inf-sup constant.
Theorem 10. The problem of finding the inf-sup constant of the bilinear
form (51) is equivalent to finding the smallest λ in R, v, y in H10 (Ω) and p
in L20 (Ω) such that
−N1 v + φ ∇ p = 0,
(57)
div(φv + (1 − φ)y) = λp,
−N2 v + (1 − φ) ∇ p = 0.
Proof. We first define the operator T : Q → (H × H) 0 given by
T [q](v, y) = hφ ∇ q, viH 0 ×H + h(1 − φ) ∇ q, yiH 0 ×H ,
which thanks to Lemma 20 is defined with the norm
kT [q]k2 := k(φ ∇ q, (1 − φ) ∇ q)k2H 0 ×H 0 = kφ ∇ qk2H 0 + k(1 − φ) ∇ qk2H 0 .
We then rewrite the inf-sup condition as follows by using Lemma 21:
2
β = inf
sup
q∈Q v,y∈H
q6=0 (v,y)6=0
= inf
sup
q∈Q v,y∈H
q6=0 (v,y)6=0
(div(φv + (1 − φ)y), q)
k(v, y)kH1 ×H2 kqkQ
−T [q](v, y)
k(v, y)kH1 ×H2 kqkQ
2
2
kT [q]k2
q∈Q kqk2
Q
= inf
q6=0
kφ ∇ qk2H 0 + k(1 − φ) ∇ qk2H 0
q∈Q
kqk2Q
= inf
q6=0
−1
−(q, div(φN−1
1 φ ∇ q + (1 − φ)N2 (1 − φ) ∇ q))
.
q∈Q
kqk2Q
= inf
q6=0
−1
Defining the operator S(q) := div(φN−1
1 φ ∇ q + (1 − φ)N2 (1 − φ) ∇ q)
2
and λ := β we prove our claim.
3.6 numerical tests
We present some numerical tests to investigate the dependence of
the inf-sup constant on the parameter φ in Figure 6. The experiments
were performed with the SciPy library [105], which contains a wrapper for the implicitly restarted Arnoldi method in ARPACK [120]. To
avoid rescaling the pressure, on the unit square Ω = (0, 1)2 the experiments were performed with v = 0 on x1 = 0 and y = 0 on x0 = 0.
The dependence on φ was then tested for N1 = N2 = ∆−1 for an extension of the results regarding the divergence operator, and then to
better understand the results on Figure 5 with N1 = (2 div µf ε(·))−1
and N2 = (div CHooke ε(·))−1 , the diffusive operators associated to the
fluid and solid momenta, respectively, with two different sets of parameters. The numerical tests confirm that when the operators N1
and N2 are the same and equal to the Laplace operator, the stability behaviour of the problem with respect to the fluid phase and
the solid phase is symmetric. Instead, if the operators N1 and N2
are chosen as in the poromechanics problem, then we observe that
the stability properties are dominated by the fluid phase. This behavior becomes even more evident when realistic parameters are used,
in which case we observe that the stability properties of the chosen
k+1
k × Qk × Qk
spaces Vf,h
× Vs,h
v,h
p,h are equivalent in practice to those
k+1
k+1
k
k
of Vf,h × Vs,h × Qv,h × Qp,h . Still, this scenario shows that considering both the fluid velocity and the solid displacement belonging
to a finite element space of higher order than the one for the pressure provides a stable approximation. This can be seen in subfigure
2 × V 2 ) is
(f), where the minimum of the P2 − P2 curve (green, Vf,h
s,h
more than an order of magnitude bigger than that of the fluid-stable
2 × V 1 ). Moreover, we notice that the
regime (P2 − P1 blue curve, Vf,h
s,h
minimum of the P2 − P2 curve roughly equals the maximum of the
1 × V 2 ).
solid-stable regime (P1 − P2 orange curve, Vf,h
s,h
3.6
numerical tests
In this section, we present some numerical tests related to problem
(17). The first one is a classical benchmark known as the swelling test
[50]. The second one shows a spatially dependent porosity which explores the inf-sup stability with respect to the dominant phase (solid
or fluid), and the last one is a preliminary result regarding the modelig of blood perfusion in the human left ventricle with an idealized
geometry.
3.6.1
Swelling test
This test studies the behaviour of a 2D slab in absence of volume
forces. The slab is subject to an external pressure σf n = −pext n, pext (t) =
103 (1 − exp(4t2 )) on the left and null stress on the right. Above and
below it uses a no-slip boundary condition vf = vs , which we impose
61
62
linearized poromechanics
(a) N1 = N2 =
(b) N1 = N2 = ∆−1 , semilog y
∆−1 .
axis.
(d) N1 = (2µf div ε(·))−1 , N2 =
=
(div CHooke ε(·))−1 , semilog
y axis.
(e) N1 = (2µf div ε(·))−1 , N2 =
(f) N1 = (2µf div ε(·))−1 , N2 =
(c) N1 = (2µf
(div CHooke
div ε(·))−1 , N
ε(·))−1 .
(div CHooke
parameters.
ε(·))−1 ,
2
physical
(div CHooke ε(·))−1 , semilog y
axis, physical parameters.
Figure 6: Inf-sup constant β with respect to the porosity. Images (a), (b),
(c) and (d) have all parameters set to 1, instead (e) and (f) use a
realistic parameters. The code Pa − Pb on the plots stands for a
fluid-solid-pressure discretization with elements Pa − Pb − P1 .
3.6 numerical tests
weakly with a constant γ = 2 105 (more details in [49]). The boundary
conditions for the solid are: sliding on the bottom and left sides, the
external pressure also acts on the solid phase through σs n = −pext n
on the left and the rest of the boundary is of null traction type (see
Figure 7). The results, shown in Figure 7 are obtained with the following parameters: ρf = ρs = 1000, µf = 0.035, λs = 711, µs = 4066, κs =
2 · 108 , ∂Ω = 2 · 105 , κ−1
= 107 I, all in SI units with |Ω| = 10−4 disf
cretized with 12 elements per side. The finite element spaces used
2 , Q1 , V 2 , Q1 for the fluid velocity, pressure, displacement
are Vf,h
p,h
s,h
v,h
and solid velocity respectively.
(a)
(b)
Figure 7: (a) Boundary conditions for the swelling test, (b) results at time
t = 1.
3.6.2
Inf-sup stability test
This test shows how the poromechanics problem can exhibit different
stability behaviors in the same domain. We use a setting similar to the
swelling test, the differences being: (i) The fluid, in which we impose
a quadratic flow with a peak value of 0.01 on the left instead of a
Neumann condition; (ii) the parameters: λ = µ = 0.035, κf −1 = 104 I;
and (iii) the porosity function, given by φ ≈ I{y60.5} (not exactly as it
must be strictly contained in [0, 1]). In Figure 8 we show the pressure
field, which is unstable only when the corresponding phase is not
discretized appropriately. In Figure 8a fluid and displacement are discretized with P1 elements (same as pressure), thus both regions show
unstable behavior. In Figure 8b, only the fluid is unstable and thus we
see instabilities where the fluid is dominant (below). Figure 8c is the
opposite of 8b, and as expected when both physics are approximated
with P2 elements we see stable pressure (Figure 8d).
3.6.3
Contraction of an idealized model of left ventricle
We finally present a prospective simulation in the field of heart modeling (see [154] and [79]), performed on the prolate geometry (see
63
64
linearized poromechanics
(a) P1 × P1
(b) P1 × P2
(c) P2 × P1
(d) P2 × P2
Figure 8: Pressure of inf-sup test for all combinations of fluid/displacement
finite element spaces.
Figure 3), for which we modify problem (7) to include nonlinear mechanics:
ρs (1 − φ)∂tt ys − div P (F ) + (1 − φ) ∇ p
−φ2 k−1
f (vf − ∂t ys ) = ρs (1 − φ)f,
ρf φ∂t vf − div (φσvis (vf )) + φ ∇ p
ys − ys n−1
2 −1
= ρf φf,
+φ kf
vf −
∆t
(58)
(1 − φ)2
∂t p + div (φvf ) + div ((1 − φ) ∂t ys ) = 0.
κs
We note that this is a hybrid model, in the sense that it includes a
nonlinear mechanics response but it does not account for large deformations in the fluid momentum and mass conservation. To model
the ventricle mechanics, a Guccione constitutive law [87] was used together with an artificial active contraction force. The constitutive law
is given by
κ
W(F ) = C exp{Q(F ) − 1} + (J − 1) log J,
2
2
2
Q = bf Eff + bs Ess + bn E2nn + 2(bfs E2fs + bfn E2fn + bsn E2sn ),
1
E = (F T F − I), F = ∇ ys + I, Euv = (Ev) · u,
2
where f, s and n are a pointwise set of independent vectors directed
towards the heart fibers, sheets and normal directions, and the active
stress is given by
Pa = 3 · 104 sin(πt)
(F f) ⊗ f
.
kF fk
We used the same parameters from [182]: C = 0.88 · 103 , bf = 8, bs =
6, bn = 3, bfs = 12, bfn = 3, bsn = 3, κ = 5 · 104 . We present the solution in Figure 9, in which we note that the model is able to capture
movement along the fibers in this coupled framework. Also note that
during contraction, fluid is being ejected from the base of the ventricle. This is coherent with the model setting, as a null stress Neumann
condition was imposed for the fluid at the base (flat portion of the
3.7 conclusions
t = 0.0
t = 0.25
t = 0.75
t = 1.0
t = 0.0
t = 0.25
t = 0.75
t = 1.0
Figure 9: Results of the (nonlinear) left ventricle test simulation. The top
row shows the deformed geometry, pressure represented by colors,
fluid velocity by arrows. The bottom row shows the deformed geometry from above so as to observe the twisting due to the fibers.
surface). We see that our results are coherent with the ones recently
obtained in [188], using a similar (idealized) geometrical setting of
the ventricle but referring to a different model applied in the finite
deformation setting.
3.7
conclusions
In this chapter we presented a complete mathematical and numerical
analysis of the linearized poromechanics problem first addressed in
[50]. For the well-posedness analysis we have combined the theory of
Differential Algebraic Equations with the Faedo-Galerkin technique.
We remark that the analysis presented here features a relaxation of
the constant porosity condition used in [50].
We have discretized the problem with the backward Euler scheme
in time and Taylor-Hood-type finite elements in space which require
fluid velocity, displacement and pressure to be approximated by Pk+1 −
Pk+1 − Pk piecewise polynomials at the element level, thus leaving
solid velocity unconstrained. The pressure and the velocities of the
fluid and solid phases are coupled by a quasi-incompressibility constraint that has been thoroughly analyzed, shedding light on properties of the model that were not completely understood yet. In particular, we show that equal order approximation of the previous variables
is not stable. Only the k + 1/k-th order approximations of velocities
and pressure are always stable in practice. Interestingly, our analysis
shows that, depending on the porosity, the approximation of the fluid
65
66
linearized poromechanics
or solid velocities can be selectively degraded to the polynomial order
used for the pressure. These findings are confirmed by the numerical
tests which complement the ones previously performed in [50] with
this model.
We highlight the robustness of the inf-sup stable finite elements
proposed with respect to the porosity. In nonlinear poromechanics,
the porosity is no longer a parameter but a variable, which means
no control over the possibly stable and unstable regions. With our
framework, we guarantee the stability of the scheme independently
of the porosity.
4
I T E R AT I V E S C H E M E S F O R P O R O M E C H A N I C S
The purpose of this chapter is to develop efficient solution strategies
for (7), which we consider discretized in time with an implicit Euler
scheme. Most of the work contained in this chapter is available online
as a preprint [36]. In general, the approach for numerically approximating nonlinear problems is to first discretize and then perform
the linearization of the discrete problem, obtaining a discrete tangent
problem to which the solution strategies proposed later on will be
applied. Since the focus of this work is on solvers for the discrete
tangent problem, for a simpler presentation we reverse this approach.
Namely, we start from the linearization of the problem, i.e. (7), which
is fully continuous. Then, we address the numerical discretization of
such problem and we develop the numerical solvers for it, based on
the splitting into several subproblems. In other words, we adopt an
approach that could be summarized as linearize then discretize then
split. We point out that other choices are viable, for example in [49] a
solution strategy where the time discretization is addressed directly
for the nonlinear problem and then the resulting equations are linearized through a Newton-Raphson method is addressed, which is a
discretize then split then linearize. The main difference resides in a
monolithic treatment of the tangent problem.
The iterative solution procedures we develop use techniques similar to those applied so far to the quasi-static Biot equations. Although they model similar phenomena, Equation (7) and Biot’s model
present a different structure (see Remark 3.1.1), where system (7)
presents the advantage of being interpretable as a generalized Stokes
problem after a time discretization procedure. This will be fundamental for the development of splitting schemes, as they are built
upon the saddle point structure of the problem. The main splitting
strategies we use are undrained [197] and an L2 diagonally stabilized scheme [159], which generalizes the classical fixed-stress. The
undrained splitting scheme is analyzed in the framework of generalized gradient flows as developed in [39], where the problem is recast
as a minimization one and then split through alternate minimization.
The diagonal stabilization is motivated by the fixed-stress scheme,
where a mass term is included to the split system. All equations consider a stabilization term, and the amount of required stabilization is
determined by the analysis. This method can be analyzed by means
of a relative stability analysis. Fixed-stress instead is motivated by
means of an approximate Schur complement in which the diffusion
operators are neglected. This can be further improved by neglecting
67
68
iterative schemes for poromechanics
instead the identity operators and then combining both approaches
as in the well-known Cahouet-Chabard scheme [51], which is the approach we use to obtain a 3-way split variant of the diagonal split.
Experience in geosciences has established the superiority of the
fixed-stress approach, which we also found to be true in this problem. The greatest weakness of the undrained scheme is that it is very
sensitive to the bulk modulus, meaning that quasi-incompressible materials are very difficult to solve with it. We also extend these results
to a simplified nonlinear model in which the solid stress tensor is replaced with a nonlinear Piola stress tensor which incorporates cardiac
activation through an active stress term, where we see that a fixedstress approach shows very promising results for cardiac simulations
with both two and three way splittings. This chapter is structured as
follows: In Section 4.1 we show the discrete problem to be analyzed
and its structure, in Section 4.2 we develop the undrained splitting
scheme, in Section 4.3 we develop the diagonally L2 -stabilized splitting scheme, in Section 4.4 we perform the convergence analysis of
both splitting schemes, in Section 4.5 we show several numerical tests
to study the parameter sensitivity of the schemes and in Section 4.6
we apply all the developed schemes to a model with large deformations.
4.1
numerical approximation of the linearized problem
We start form a backwards Euler time discretization. We will discuss
later on how higher order time discretizations are also viable and the
resulting discrete problem maintains its fundamental traits, such that
the numerical solvers developed in what follows will still be applicable. We consider a partition of the time interval of interest [0, T ], given
by 0 = t0 < t1 < ... < tn < ... < tN = T with, for simplicity, constant
time step size ∆t = tn − tn−1 . The temporal derivatives within the
model (7) are approximated by finite differences:
ys n − ys n−1
,
∆t
ys n − 2ys n−1 + ys n−2
∂tt ys (tn ) ≈
,
∆t2
vn − vn−1
f
∂t vf (tn ) ≈ f
,
∆t
pn − pn−1
∂t p(tn ) ≈
.
∆t
∂t ys (tn ) ≈
We assume that besides the initial data the first time step has been
already determined. From the second time step the fully dynamic
linearized model can then be approximated by the Implicit Euler
discretization using the above finite difference approximations: For
n > 2, given ys n−1 , ys n−2 , pn−1 , vn−1
, find ys n , pn , vn
f such that
f
4.1 numerical approximation of the linearized problem
ρs (1 − φ)
69
ys n − 2ys n−1 + ys n−2
− div σs (ys n ) + (1 − φ) ∇ pn
∆t2
ys n − ys n−1
2 −1
n
= ρs (1 − φ)fn ,
−φ kf
vf −
∆t
(59a)
n−1
vn
f − vf
n
− div φσf (vn
f ) +φ∇p
∆t
ys n − ys n−1
2 −1
n
= ρf φfn ,
+φ kf
vf −
∆t
(59b)
ys n − ys n−1
(1
= 0.
+ div φvn
+
div
−
φ)
f
∆t
(59c)
ρf φ
(1 − φ)2 pn − pn−1
κs
∆t
Such problem must satisfy the same boundary conditions of (7) at
each time tn , where fn , ys D,n , etc. denote suitable approximations in
time of the external data at time tn . In what follows we will apply
the lifting technique to nonhomogeneous Dirichlet boundary data.
In this way, all the forcing terms of the problem (volume forces and
surface forces/data) will be implicitly represented in the volume term
fn without significant loss of generality. Initial conditions are also
equivalent to (12)-(15). Finally, we stress that the mass conservation
equation has been divided by the constant fluid density ρf in order
to highlight an apparent symmetry between the equations.
Remark (Higher order time discretization). Applying alternative diagonally implicit Runge-Kutta schemes results in coupled systems of governing equation of similar type. Material parameters possibly have to be scaled
appropriately, and the right hand side source terms may then also include
further previous data. However, we stress that the analysis of the splitting in
this work does not depend on the choice of the time discretization similarly
as in [15].
Let V, W, Q denote suitable function spaces for the solid displacement, fluid velocity, and fluid pressure, respectively, at discrete time
tn , incorporating in particular homogeneous essential boundary conditions on the relevant boundaries,
s
V := y?s ∈ H1 (Ω)d (1 − φ)y?s ∈ H(div; Ω), y?s = 0 on ΓD
,
?
f
W := vf ∈ H1 (Ω)d φv?f ∈ H(div; Ω), v?f = 0 on ΓD
,
?
2
Q := p ∈ L (Ω) ,
where we used the definition
H(div; Ω) := {v ∈ L2 (Ω) div v ∈ L2 (Ω)}.
Remark. We note that the requirements (1 − φ)y?s , φv?f ∈ H(div; Ω) are
formally required for the corresponding terms in the weak formulation to
70
iterative schemes for poromechanics
be well-defined. This requires higher regularity of φ, where it is sufficient
to consider as in Chapter 2 that both φ and 1/φ belong to W s,r (Ω) with
s > d/r and r > 1.
n
Then the canonical weak formulation of (7) reads: Find (ys n , vn
f ,p ) ∈
V × W × Q such that for all test functions (y?s , v?f , p? ) ∈ V × W × Q
it holds that
ys n − 2ys n−1 + ys n−2 ?
ρs (1 − φ)
,
y
s
∆t2
+ (CHooke ε(ys n ), ε(y?s )) − (pn , div ((1 − φ)y?s ))
ys n − ys n−1
n
?
2 −1
?
vf −
, ys = (fn
− φ kf
s , ys ) ,
∆t
(60a)
!
vn − vn−1
?
f
, v?f + (φ2µf ε(vn
ρf φ f
f ), ε(vf ))
∆t
ys n − ys n−1
n
?
?
n
?
2 −1
vf −
, vf = (fn
− (p , div (φvf )) + φ kf
f , vf ) ,
∆t
(60b)
2
n
n−1
(1 − φ) p − p
?
, p? + (div (φvn
f ),p )
κs
∆t
ys n − ys n−1
?
, p = 0.
+ div (1 − φ)
∆t
(60c)
The spatial discretization is based on the Galerkin projection of the
n
solution (ys n , vn
f , p ) ∈ V × W × Q on suitable discrete finite element
spaces Vh , Wh , Qh that for the sake of simplicity we consider conforming, namely Vh ⊂ V, Wh ⊂ W, Qh ⊂ Q. Also, all the physical
parameters of the tangent problem are assumed to be constant in time
and uniform in space. Under these assumptions, the fully discrete version of the problem is formally equivalent to (60), where the solution
n
n
(un
s,h , vf,h , ph ) is sought in Vh × Wh × Qh and the test functions are
taken in the same discrete space. Then, to avoid redundancy of notation, we will identify problem (60) with the fully discrete one and
we will omit to specify the subindex h, unless strictly necessary. The
finite element spaces Vh , Wh , Qh will be kept generic throughout the
derivation of the numerical solution algorithms, until the discussion
of suitable numerical examples that will refer to precise choices of
such spaces.
We observe that the poroelasticity model (60) can be viewed as a
generalized unsteady compressible Stokes system – incompressible if
4.1 numerical approximation of the linearized problem
κs → ∞. To show this, we denote with X? the dual space of X and we
introduce operators
M : V × W → V ? × W? ,
A : V × W → V ? × W? ,
D : V × W → Q? ,
Mp : Q
→ Q? ,
defined by
" # " #!
y?
y
:=
M s , s
v?f
vf
" # " #!
y?
y
,
M s , s
v?f
vf
" # " #!
y
y?
:= (CHooke ε(ys ), ε(y?s )) + ∆t (φ2µf ε(vf ), ε(v?f )) ,
A s , s
?
vf
vf
D
" #
ys
vf
!
,p
?
:= (div ((1 − φ)ys ) , p? ) + ∆t (div (φvf ) , p? ) ,
Mp p, p? :=
(1 − φ)2
p, p? ,
κs
for all (ys , vf , p) ∈ V × W × Q and (y?s , v?f , p? ) ∈ V × W × Q, where
we set
"
#
ρs (1−φ)
φ2 −1
2 k−1
I
+
k
−φ
2
∆t f
f
∆t
M :=
∈ R2d×2d .
−1
−1
2
2
−φ kf
ρf φI + ∆t φ kf
Defining also the load operators
ρs (1 − φ)
n−1
n−2
?
n
?
n
?
(f , ys ) := (fs , ys ) +
(2ys
− ys
), ys
∆t2
2
φ −1 n−1 ?
+
k ys
, ys ,
∆t f
?
n−1 ?
n−1 ?
(gn , v?f ) := ∆t (fn
, vf − φ2 k−1
y
,
v
,
s
f
f , vf ) + ρf φvf
f
n
?
(h , p ) :=
(1 − φ)2 n−1 ?
, p + div (1 − φ)ys n−1 , p? ,
p
κs
the poroelasticity model (60) can be rewritten as
!
n
#
"
y
fn
s
>
M + A −D
n
n
in V ? × W ? × Q? .
vf = g ,
D
Mp
pn
hn
(61)
Note, that M has the character of a scaled L2 (Ω) inner product, A is
an elasticity/diffusion operator, D is a divergence-like operator, and
71
72
iterative schemes for poromechanics
Mp acts as scaled L2 (Ω) inner product on the pressure space. Under
these considerations, (61) has the structure of an unsteady compressible Stokes system, and we shall refer to A as the reaction part and M
as the diffusion part.
Remark (Coupling character). We make two observations, relevant for
the following discussion of iterative splitting schemes:
• Unlike for the Biot equations, each of the three equations exhibits crosscoupling to all remaining equations, whereas, for the Biot equations,
the ys − vf coupling operator is absent.
• Only the (ys , vf ) − p coupling has a saddle-point character, whereas
the ys − vf is symmetric. In particular, in contrast to the quasi-static
Biot equations, the ys − (vf , p) coupling is neither symmetric nor of
saddle-point type.
4.2
the undrained splitting scheme
In the following, we introduce an iterative splitting for the semidiscrete approximation (60), decoupling the momentum equation for
the solid phase and the fluid flow equations. The construction and
analysis of the resulting iterative decoupling scheme is motivated
by the general framework introduced in [39]. The central idea is to
reformulate the discrete approximation as an auxiliary convex minimization problem and apply alternating minimization. Ultimately,
reformulated in terms of (60), the final scheme is closely related to
the undrained split for the quasi-static Biot equations [111], adding
a div-div stabilization term to the momentum equation for the solid
phase. A crucial assumption, as in the case of the quasi-static Biot
equations, is non-vanishing compressibility:
Assumption 1. It holds
1
N
:=
(1−φ)2
κs
> 0 almost everywhere in Ω.
Problem formulation as convex minimization
4.2.1
We choose ys n and vn
f as primary variables. Under Assumption 1, the
mass conservation equation can be inverted wrt. the pressure, such
that
n
n
pn = N ∆t gn
(62)
p − ∆t div (φvf ) − div ((1 − φ) ys ) ,
where
gn
p :=
1
(1 − φ)2 1 n−1
p
+
div (1 − φ) ys n−1 .
κs
∆t
∆t
4.2 the undrained splitting scheme
73
This allows to formally reduce (60) to a two-field formulation for the
solid displacement and fluid velocity: Find (ys n , vn
f ) ∈ V × W such
that for all test functions (y?s , v?f ) ∈ V × W it holds that
ρs (1 − φ) n ?
ys , ys + (CHooke ε(ys n ), ε(y?s ))
∆t2
n
n
?
+ N −∆t gn
p + ∆t div (φvf ) + div ((1 − φ) ys ) , div ((1 − φ)ys )
1 n
?
, y?s = (gn
vn
ys
(63a)
− φ2 k−1
s , ys ) ,
f −
f
∆t
?
n
?
(φvn
f , vf ) + ∆t (φ2µf ε(vf ), ε(vf ))
n
?
n
+ N −∆t gn
p + ∆t div (φvf ) + div ((1 − φ) ys ) , ∆t div (φvf )
1 n
?
?
2 −1
n
, vf = ∆t (gn
(63b)
+ ∆t φ kf
vf −
ys
f , vf ) ,
∆t
where we multiplied the momentum equation for the fluid by ∆t. We
?
n
?
also considered gn
s ∈ V and gf ∈ W as given by
?
ρs (1 − φ)
n
?
n
?
n−2
n−1
(gs , ys ) := (fs , ys ) +
, ys
− ys
2ys
∆t2
!
φ2 k−1
f
+
ys n−1 , y?s , y?s ∈ V,
∆t
?
n ?
n−1 ?
n−1 ?
(gn
, vf − φ2 k−1
, vf , v?f ∈ W.
f , vf ) := (ff , vf ) + φvf
f ys
The symmetry of (63) reveals that it corresponds to the optimality
conditions of a block-separable convex minimization problem. Namely
it holds
(ys n , vn
f )=
arg min
J(ys , vf ),
(64)
(ys ,vf )∈V×W
with the objective function given by
1
1 ρs (1 − φ)
ys , ys + (CHooke ε(ys ), ε(ys )) (65)
J(ys , vf ) :=
2
2
∆t
2
1
∆t
(φ2µf ε(vf ), ε(vf ))
+ (ρf φvf , vf ) +
2
2
N
2
+
∆t gn
p − ∆t div (φvf ) − div ((1 − φ) ys ) L2 (Ω)
2 1
∆t
1
2 −1
+
φ kf
vf −
ys , vf −
ys
2
∆t
∆t
n
− (gn
s , ys ) − ∆t (gf , vf ) .
The problem formulation (64)-(65) is the basis for the following construction and convergence analysis of a robust split scheme for (60).
4.2.2
Robust splitting via alternating minimization
Motivated by [39], we propose an iterative splitting of the problem
(60) by applying the fundamental alternating minimization algorithm
74
iterative schemes for poromechanics
to the equivalent variational formulation (64). This results in Algorithm 1.
Algorithm 1: Iteration k > 1 of the alternating minimization
applied to (64)
1
Input: (ys n,k−1 , vn,k−1
) ∈ V ×W
f
2
Determine ys n,k := arg minys ∈V J(ys , vn,k−1
)
f
3
Determine vn,k
:= arg minvf ∈W J(ys n,k , vf )
f
By introducing a pressure iterate analogous to (62)
n,k
n,k
(1
,
−
φ)
y
−
div
pn,k := N ∆t gn
−
∆t
div
φv
s
p
f
k > 0,
the resulting scheme can be reformulated in the frame of a threefield formulation corresponding to (60). The k-th iteration of the iterative splitting scheme decouples in two steps and reads equivalently:
Given (vn,k−1
, pn,k−1 ) ∈ W × Q, find ys n,k ∈ V satisfying for all
f
y?s ∈ V the following:
ys n,k − 2ys n−1 + ys n−2 ?
ρs (1 − φ)
, ys + CHooke ε(ys n,k ), ε(y?s )
2
∆t
+ N div (1 − φ)(ys n,k − ys n,k−1 ) , div ((1 − φ)y?s )
− pn,k−1 , div ((1 − φ)y?s )
ys n,k − ys n−1
n,k−1
2 −1
?
?
− φ kf
vf
−
, ys = (fn
s , ys ) .
∆t
(66)
n,k ) ∈ W × Q,
The second step reads: Given ys n,k ∈ V, find (vn,k
f ,p
satisfying for all (v?f , p? ) ∈ W × Q the following:
!
vn,k
− vn−1
?
?
f
f
, vf + φ2µf ε(vn,k
),
ε(v
)
− pn,k , div (φv?f )
ρf φ
f
f
∆t
ys n,k − ys n−1
n,k
2 −1
?
?
+ φ kf
vf −
, vf = (fn
f , vf ) , (67a)
∆t
(1 − φ)2 pn,k − pn−1 ?
?
, p + div φvn,k
,
p
f
κs
∆t
ys n,k − ys n−1
?
, p = 0.
(67b)
+ div (1 − φ)
∆t
Due to the close relationship to the undrained split for the quasistatic Biot equations [111], we adapt the name and call the above
scheme (66)–(67) the undrained split for the poroelasticity model (60).
In equation (66), the operator
N div (1 − φ)(ys n,k − ys n,k−1 ) , div ((1 − φ)y?s )
naturally emerges to stabilize the increment of ys n at each iteration,
such that convergence is guaranteed, as we show in Section 4.4.1.
4.3 a diagonally stabilized splitting scheme
4.3
a diagonally stabilized splitting scheme
Here we propose an alternative approach for splitting the computation of the solid displacement ys and the fluid flow problem governing (vf , p). In contrast to the undrained split presented in Section 4.2,
stabilization is added to the fluid flow problem, in particular to the
pressure equation. However, we will see later that stabilizing any of
the equations is actually allowed.
In the context of the classical Biot equations, the fixed-stress split
follows this philosophy [37, 110, 111, 173]. The L2 type stabilization
added to the pressure equation origins from the motivation to fix
the total stress while solving the fluid flow problem. However, for
the new poromechanics problem it is difficult to directly connect a
stabilization with a physical interpretation as fixing the total stress.
An alternative interpretation is an appropriate approximation of the
Schur complement of the fluid flow problem with respect to the solid
problem. Here, it is important that the solid displacement and the
fluid velocity are not directly coupled, only via the fluid pressure.
In the context of the model considered here, depending on the analysis technique, stabilizing merely the pressure equation with an L2
type stabilization seems not to lead to an unconditionally stable algorithm. This is due to the fact that a displacement-flow split does
not respect any symmetry or saddle point structure; we recall that
the ys − vf coupling is symmetric, whereas the ys − p coupling is
skew-symmetric. For this reason, a Schur complement of the fluid
equations with respect to the solid equations may not necessarily be
symmetric positive definite and a pressure-stabilized approach may
not be the optimal strategy to cure this problem.
4.3.1
Two-way splitting scheme
The undrained split developed and analyzed in Section 4.2 has some
short-comings. Most evidently, in the incompressible case, it is not defined. Experience on splitting schemes for the quasi-static Biot equations shows that a pressure-stabilized splitting schemes may feature
better performance [110]. This motivates exploring pressure-stabilized
splitting schemes for the poroelasticity model (60).
Compared to the quasi-static Biot equations, the considered model
for the thermodynamically consistent poroelasticity model (60) makes
it more challenging to develop a robust pressure-stabilized iterative
split à la the fixed-stress split. There are mainly two reasons: (i) The
different scalings in the momentum equation for the solid phase in
principle interpolate between a generalized steady Stokes system and
a generalized mixed Poisson system and (ii) the coupling between the
displacement and the remaining variables is neither of saddle point
type, nor is it a symmetric coupling, cf. Remark 4.1. Consequently, a
75
76
iterative schemes for poromechanics
naive fixed-stress split ansatz cannot be unconditionally robust. We
also stress that although utilizing the framework presented in [39]
would yield a robust pressure-stabilized split, the required application of duality arguments as presented seems not practical in this
case due to (i).
According to the previous considerations, we go beyond the fixedstress split and we propose a diagonal L2 -stabilization of the iterative
splitting method across all three subproblems. In the following, let βs
(tensor), βf (tensor), βp > 0 be stabilization parameters, potentially
varying in space. The subsequent convergence analysis will reveal
whether stabilizing a particular subproblem is additionally beneficial.
One iteration can be decomposed into two steps. Following the
philosophy of the fixed-stress approach, the fluid flow problem is
solved first (this is not necessary for convergence). The fluid flow step
n,k ) ∈ V × W × Q, satisfying
reads: Given ys n,k−1 ∈ V, find (vn,k
f ,p
for all (v?f , p? ) ∈ W × Q the following:
!
n−1
vn,k
−
v
?
f
ρf φ f
, v?f + φ2µf ε(vn,k
),
ε(v
)
(68a)
f
f
∆t
n,k−1
?
− pn,k , div (φv?f ) + βf (vn,k
−
v
),
v
f
f
f
ys n,k−1 − ys n−1
?
, v?f = (fn
+ φ2 k−1
vn,k
−
f , vf ) ,
f
f
∆t
(1 − φ)2 pn,k − pn−1 ?
, p + βp (pn,k − pn,k−1 ), p?
(68b)
κs
∆t
ys n,k−1 − ys n−1
n,k
?
?
+ div φvf
, p + div (1 − φ)
, p = 0.
∆t
n,k ) ∈ W × Q,
The second (solid mechanics) step reads: Given (vn,k
f ,p
find ys n,k ∈ V satisfying for all y?s ∈ V the following:
ys n,k − 2ys n−1 + ys n−2 ?
, ys + CHooke ε(ys n,k ), ε(y?s )
ρs (1 − φ)
2
∆t
n,k
n,k−1
+ βs (ys
− ys
), y?s
− pn,k , div ((1 − φ)y?s )
ys n,k − ys n−1
n,k
2 −1
?
?
− φ kf
vf −
, ys = (fn
s , ys ) . (69)
∆t
Hence, a general stabilized split is proposed where suitable values for
the stabilization parameters will be determined using a convergence
analysis, in order to guarantee unconditional stability.
4.3.2
Three-way splitting scheme
A diagonally stabilized two-way split (68)–(69) still involves solving
a saddle-point problem (wrt. to vf and p). Hence, it is not perfectly
4.3 a diagonally stabilized splitting scheme
77
suitable as a preconditioner for a Krylov subspace method. This motivates to derive a 3-way split version of the diagonally stabilized twoway split (68)–(69). For this, the coupled saddle point problem (68)
is decoupled such that approximations for vf and p are determined
separately. As the second step is identical to solving an elasticity problem, only the first step has to be discussed appropriately. We utilize
in following the so-called Cahouet-Chabard preconditioner [51] for
(68), which has been theoretically shown to be a uniform preconditioner in the sense of uniform spectral equivalence [125, 146]. The
fluid-pressure problem (68) can be rewritten as
#" #
"
Mf + Af −BT vf
B
C
=
" #
rf
p
rp
,
(70)
for corresponding residual vectors rf , rp and considering the following operators:
Mf vf = − div φσf (vf ),
φρf
2 −1
Af vf =
+ φ kf + βf vf ,
∆t
Bvf = div(φvf ),
BT p = φ ∇ p,
(1 − φ)2
+ βp .
Cp =
κs ∆t
We denote the Schur complement with respect to vf as Sp = B(Mf +
Af )BT and note that system (70) can be reformulated as an iterative
scheme, by means of the approximation identity Sp (pk+1 − pk ) =
−C(pk+1 − pk ), as
"
#"
# "
#" # "
#"
# " #
r
Mf + Af −BT vfk+1
0 0 vk
0
0
?
f +
+
= f ,
k+1
k+1
k
C
p
B 0
?
0 Sp p
−p
rp
or in residual form as
"
#"
#
Mf + Af −BT
vfk+1 − vk
f
0
C + Sp
pk+1 − pk
=
" #
rf
rp
−
"
#" #
Mf + Af −BT vk
f
B
C
.
pk
(71)
The scope of the proposed splitting scheme is that of obtaining an
approximation of Sp which corresponds to the addition of two contributions, one obtained as the approximate Schur complement for
the case Af Mf (reaction-dominant) and another one for the case
Mf Af (diffusion-dominant). The basis of the derivation is the ink−1
k
k
k−1
crements problem, so we define dk
and dk
p = p −p
f = vf − vf
to rewrite (71) as
"
#"
# "
#" # "
#"
#
k
Mf + Af −BT dk+1
0
0
d
0
0
?
f +
f
+
= 0,
k+1
C
dp
B 0
?
0 Sp dk+1
− dk
p
p
78
iterative schemes for poromechanics
(72)
which yields the fundamental scaling argument, which states that the
approximated Schur complement Ŝp satisfies
k
Ŝp dk
p ≈ Bdf .
(73)
reaction dominated approximation. In this case, we consider Af Mf . This yields the following strong problem: Find (vf , p)
in W × Q such that
φρf
2 −1
k
+ φ kf + βf dk
f + φ ∇ dp = 0, (74a)
∆t
(1 − φ2 )
k
k−1
+ β p dk
) + div(φdk−1
) = 0. (74b)
p + Ŝp (dp − dp
f
κs ∆t
Integration by parts gives the following boundary conditions:
dk
f =0
on
f
ΓD
,
dk
p =0
on
f
ΓN
.
Also note that system (74) together with its boundary conditions implies that
f
∇ dk
on
ΓD
,
p =0
assuming φ ∈ (0, 1). This results in looking for the pressure in H1
instead of L2 in this case. Using the scaling relation (73) in problem
(74) we obtain that the reaction dominant Schur complement approximation Ŝp,Af satisfies
!
−1
φρf
2 −1
k
k
k
+ φ kf + βf
φ ∇ dp ,
Ŝp dp ≈ − div(φdf ) = − div φ
∆t
which yields
2
Ŝp,Af dk
p = − div φ
φρf
+ φ2 k−1
f + βf
∆t
−1
!
∇ dk
p
.
diffusion dominated case. In this case we have Mf Af ,
which gives the following strong problem: Find (vf , p) in W × Q such
that
k
− div φσf (dk
f ) + φ ∇ dp = 0, (75a)
(1 − φ2 )
k
k−1
+ β p dk
) + div(φdk−1
) = 0, (75b)
p + Ŝp (dp − dp
f
κs ∆t
where again using the scaling relation (73) with (75) we obtain the
approximated Schur complement Ŝp,Mf which satisfies
k
−1
Ŝp,Mf dk
φ ∇ dk
p ≈ − div(φdf ) = − div(φ[−φ div σf (·)]
p) ≈
φd k
d .
2µf p
4.3 a diagonally stabilized splitting scheme
79
Note that the differential operators cancel out, whereas the problem
dimension d comes from the scaling of the symmetric gradient, which
satisfies tr ε 6 d ε : ε. This yields
Ŝp,Mf =
φd
.
2µf
the three-way split. The resulting scheme is the previous diagonal split but with an additional decoupling of problem (68) and
reads as follows:
1. Compute the diffusion dominated pressure as follows: Given
(ys n,k−1 , vn,k−1
) ∈ V × W, find pn,k
∈ Q, satisfying for all
1
f
?
p ∈Q
!
n−1
(1 − φ)2 pn,k
?
1 −p
,p
κs
∆t
n,k−1
?
CC,1 n,k
n,k−1
?
+ βp (pn,k
−
p
),
p
+
β
(p
−
p
),
p
p
1
1
(76a)
ys n,k−1 − ys n−1
n,k−1
?
?
, p = 0,
+ div φvf
, p + div (1 − φ)
∆t
where βp is chosen as before, and βCC,1
=
p
φd
2µf .
2. Compute the reaction dominated pressure as follows: Given
(ys n,k−1 , vfn,k−1 ) ∈ V × W, find pn,k
∈ Q̃, satisfying for all
2
?
p ∈ Q̃
!
n−1
−
p
(1 − φ)2 pn,k
2
, p?
κs
∆t
n,k−1
n,k−1
+ βp (pn,k
), p? + βCC,2
∇(pn,k
), ∇ p?
p
2 −p
2 −p
ys n,k−1 − ys n−1
n,k−1
?
?
+ div φvf
, p + div (1 − φ)
, p = 0,
∆t
−1
fφ
where βp is chosen as before, and βCC,2
= φ2 ρ∆t
I + βf + φ2 k−1
.
p
f
Boundary conditions have to be assigned by altering the trial
and test spaces for pressure. We assign zero Dirichlet boundary
condtions for the pressure increments on the complement of the
Dirichlet boundary for the fluid velocity.
3. Mix the pressures through two constants α1 , α2 in R with
n,k
pn,k = α1 pn,k
1 + α2 p2 .
80
iterative schemes for poromechanics
4. Compute the fluid velocity as follows: Given (ys n,k−1 , pn,k ) ∈
V × Q, find vn,k
∈ W, satisfying for all v?f ∈ W
f
!
− vn−1
vn,k
?
?
f
f
ρf φ
, vf + φ2µf ε(vn,k
),
ε(v
)
f
f
∆t
− pn,k , div (φv?f )
n,k−1
?
+ βf (vn,k
−
v
),
v
f
f
f
ys n,k−1 − ys n−1
n,k
?
?
2 −1
, vf = (fn
vf −
+ φ kf
f , vf ) .
∆t
5. Compute the solid displacement by solving (69).
Remark. The mixing of the pressures could be performed optimally by
means of Aitken acceleration [3] as in [69]. In practice we have seen that
Anderson acceleration performs better than Aitken in this context, and even
though combining both might theoretically further boost performance, in
practice it deteriorates it. Because of this, we prefer the proposed approach.
4.4
convergence analysis
In this section, we address the a priori convergence analysis of both the
undrained split (66)–(67) and the diagonally L2 -stabilized two-way
split (68)–(69), proposed in Sections 4.2 and 4.3 respectively. The two
primary goals are to (i) prove the linear convergence of the undrained
split, and (ii) determine ranges and specific practical values for the
stabilization parameters employed within the diagonally L2 -stabilized
two-way split ensuring convergence. After all, the knowledge of a priori convergence rates remains only of theoretical interest. The two
goals will be achieved using different techniques. For (i) the interpretation of the undrained split as alternating minimization applied to
a strongly convex minimization problem is extensively exploited, allowing for the systematic application of sharp abstract convergence
results from the literature; for (ii) a slightly more technical approach
is chosen due to the fact that the two-way split (68)–(69) does not
fully conform with any (skew) symmetry. In particular, an abstract
relative stability concept is introduced and employed, allowing for
deducing the slightly weaker result of r-linear convergence for subsequences. The analyses of the two schemes are separately presented in
the following two subsections.
4.4.1
Convergence analysis of the undrained split
Guaranteed linear convergence of the undrained split (66)–(67) is a direct consequence of its interpretation as alternating minimization applied to a (strongly) convex optimization problem [18]. Furthermore,
4.4 convergence analysis
81
using simple yet largely sharp abstract convergence results for alternating minimization in a Banach space setting, an upper bound of
the rate of convergence can be provided [35]. In the aforementioned
work, it is showed that in each of the two steps of the alternating
minimization, the energy values of the iterates are sequentially decreased with the decrease merely governed by convexity and continuity properties of the restricted minimization problems. Since the
energy J is quadratic, energy differences relative to the optimum
will directly translate to distances to the solution, measured in the
problem-specific norm induced by the Hessian of the energy (at an
arbitrary point). We define | · | on V × W by
ρs (1 − φ0 ) ? ?
? ? 2
|(ys , vf )| :=
ys , ys + (CHooke ε(y?s ), ε(y?s ))
∆t2
+ (ρf φ0 v?f , v?f ) + ∆t (φ0 2µf ε(v?f ), ε(v?f ))
+ N k∆t div (φ0 v?f ) + div ((1 − φ0 )y?s )k2
1 ?
1 ?
2 −1
?
?
vf −
+ ∆t φ0 kf
y , vf −
y
,
∆t s
∆t s
for all (y?s , v?f ) ∈ V × W. In order to estimate the rate of convergence,
suggested by the below convergence analysis, we introduce a technical, a priori determined material constant γ > 0, given by
γ := min max {γ1 (ζ, η, ϑ), γ2 (ζ, η, ϑ)} ,
(79)
ζ>0
η∈[0,1]
ϑ∈[0,1]
where
γ1 (ζ, η, ϑ) :=(1 + ζ−1 )ηN∆t2
γ2 (ζ, η, ϑ) :=(1 + ζ)
|∇ φ0 |2
ρs (1 − φ0 )
+ ϑ∆t
L∞ (Ω)
φ0 2 κ−1
m
ρs (1 − φ0 )
,
L∞ (Ω)
N
CKorn,2
+ (1 + ζ−1 )(1 − η)NCKorn,1 + (1 − ϑ)
,
Kdr,φ0 ,min
∆t
κm > 0 denotes the smallest eigenvalue of the permeability tensor kf ,
Kdr,φ0 ,min > 0 is a porosity dependent bulk modulus type constant
given by
2
−1
K−1
dr,φ0 ,min := (1 − φ0 ) I : CHooke : I
L∞ (Ω)
,
and CKorn,1 , CKorn,2 > 0 take on the role of generalized Korn/Poincaré
constants, defined as the minimum positive numbers such that
∇ φ0 > ∇ φ0 y?s , y?s 6 CKorn,1 (CHooke ε(y?s ), ε(y?s )) , for all y?s ∈ V,
?
?
?
?
?
φ0 2 k−1
f ys , ys 6 CKorn,2 (CHooke ε(ys ), ε(ys )) , for all ys ∈ V.
It is fair to assume that CKorn,1 and CKorn,2 are closely related to the
inverse of the drained bulk modulus Kdr := Kdr,0,min .
Finally, focussing only on the fully transient model, the linear convergence result for the undrained split reads as follows.
82
iterative schemes for poromechanics
n
Theorem 11 (Linear convergence of the undrained split). Let (yn
s , vf ) ∈
n,k n,k
V × W, n > 2, denote the solution to (64), and let (ys , vf ) ∈ V × W,
k > 1, denote the corresponding approximation defined by Algorithm 1. Let
γ > 0 be the material constant defined as in (79). Then, for all k > 1, it
holds that
2
n,k
(yn,k
− yn
− vn
s
s , vf
f )
2
1
n,k−1
6 1−
(yn,k−1
− yn
− vn
s
s , vf
f )
1+γ
2
.
This convergence result is similar to the undrained split for the
quasi-static Biot equations [129]. In particular, the theoretical result
suggests degenerating convergence for nearly incompressible and impermeable media. In contrast to the quasi-static Biot equations, due
to the nature of the model, porosity heterogeneities may substantially
affect the performance of the splitting scheme.
The proof of Theorem 11 is a direct application of the following abstract convergence result for the alternating minimization, here specifically formulated in terms of Algorithm 1.
Lemma 22 (Convergence of the alternating minimization [35]). Let | · |,
| · |m , and | · |f denote semi-norms on V × W, V, and W, respectively, such
that:
(A1 ) There exist βm , βf > 0, such that for all (y?s , v?f ) ∈ V × W it holds
that
|(y?s , v?f )|2 > βm |y?s |2m
and
|(y?s , v?f )|2 > βf |v?f |2f .
Let J : V × W → R be Frechét differentiable with DJ denoting its derivative
such that:
(A2 ) The energy J is strongly convex with respect to | · | with modulus
σ > 0, i.e., for all ys , ūs ∈ V and vf , v̄f ∈ W it holds that
J(ūs , v̄f ) > J(ys , vf )+
(DJ(ys , vf ), (ūs − ys , v̄f − vf )) +
σ
|(ūs − ys , v̄f − vf )|2 .
2
(A3 ) The partial functional derivatives Dys J and Dvf J are uniformly Lipschitz continuous wrt. | · |m and | · |f with Lipschitz constants Lm and
Lf , respectively, i.e., for all (ys , vf ) ∈ V × W and (y?s , v?f ) ∈ V × W
it holds that
Lm ? 2
|ys |m ,
J(ys + y?s , vf ) 6 J(ys , vf ) + Dys J(ys , vf ), y?s +
2
L
J(ys , vf + v?f ) 6 J(ys , vf ) + Dvf J(ys , vf ), v?f + f |v?f |2f .
2
4.4 convergence analysis
n,k n,k
n
Let (yn
s , vf ) ∈ V × W denote the unique solution to (64), and let (ys , vf ) ∈
V × W denote the corresponding approximation defined by Algorithm 1.
Then, for all k > 1 it follows that
n,k
n n
J(yn,k
s , vf ) − J(ys , vf )
β σ n,k−1 n,k−1
βm σ
n
1− f
6 1−
J(ys
, vf
) − J(yn
,
v
)
.
s
f
Lm
Lf
With this, we are able to prove Theorem 11.
Proof of Theorem 11. In order to apply Lemma 22, we need to verify conditions (A1 ) − (A3 ). First of all, we note that the energy J is
quadratic. Since | · | is induced by the Hessian of J, i.e.,
|(y?s , v?f )|2 := D2 J(ys , vf )(y?s , v?f ), (y?s , v?f ) , (y?s , v?f ) ∈ V × W,
(80)
(for arbitrary (ys , vf ) ∈ V × W), the convexity property (A2 ) is satisfied with σ = 1.
Similarly, by defining | · |m and | · |f on V and W, respectively, as
partial Hessians of J
|y?s |2m := D2ys J(ys , vf )y?s , y?s , y?s ∈ V,
|v?f |2f := D2vf J(ys , vf )v?f , v?f , v?f ∈ W,
(for arbitrary (ys , vf ) ∈ V × W), the smoothness property (A3 ) is satisfied with Lm = Lf = 1.
It remains to examine (A1 ). In the following, we show that one can
choose βm = βf = (1 + γ)−1 , i.e., it holds
|y?s |2m 6 (1 + γ)|(y?s , v?f )|2 ,
|v?f |2f
6
(1 + γ)|(y?s , v?f )|2 ,
for all (y?s , v?f ) ∈ V × W,
for all
(y?s , v?f )
∈ V × W.
(81a)
(81b)
For both estimates, the following inequality will be of help
1
T ? := N kdiv ((1 − φ0 )y?s )k2 +
φ0 2 k−1
y?s , y?s
f
{z
} ∆t |
|
{z
}
=:T1
6γ
=:T2
ρs (1 − φ0 ) ? ?
?
?
ys , ys + (CHooke ε(ys ), ε(ys )) .
∆t2
(82)
Indeed, for T1 , using the product rule, the Cauchy-Schwarz inequality
and Young’s inequality, we obtain for all ζ > 0
T1 6 (1 + ζ) k(1 − φ0 ) div y?s k2 +(1 + ζ−1 ) k∇ φ0 · y?s k2 .
|
{z
}
{z
}
|
=:T10
=:T100
83
84
iterative schemes for poromechanics
Further, employing the definitions of Kdr,φ0 ,min and CKorn,1 , it follows
that
1
(CHooke ε(y?s ), ε(y?s )) ,
Kdr,φ0 ,min
>
ρs (1 − φ0 ) ? ?
00
2 ∇ φ0 ∇ φ0
T1 6 ∆t
ys , ys ,
ρs (1 − φ0 )
∆t2
∞
T10 6
T100
6
L (Ω)
?
CKorn,1 (CHooke ε(ys ), ε(y?s )) .
Similarly, employing the definitions of κm and CKorn,2 , for T2 it holds
2
T2 6 ∆t
T2 6
φ0 2 κ−1
m
ρs (1 − φ0 )
ρs (1 − φ0 ) ? ?
ys , ys ,
∆t2
L∞ (Ω)
CKorn,2 (CHooke ε(y?s ), ε(y?s )) .
By balancing the different upper bounds for T100 and T2 , and employing the definitions of γ1 and γ2 , we obtain for all ζ > 0, η ∈ [0, 1] and
θ ∈ [0, 1]
ρs (1 − φ0 ) ? ?
?
T 6 γ1 (ζ, η, θ)
ys , ys + γ2 (ζ, η, θ) (CHooke ε(y?s ), ε(y?s ))
∆t2
and thereby (82) follows.
Finally, we show (81). By definition of | · |m it holds that
ρs (1 − φ0 ) ? ?
?
?
?
|y?s |2m =
y
,
y
s
s + (CHooke ε(ys ), ε(ys )) + T .
∆t2
Hence, (81a) follows from (82). By definition of | · |f , suitable addition
and subtraction, and application of the Cauchy-Schwarz inequality
and Young’s inequality, it holds
|v?f |2f = (ρf φ0 v?f , v?f ) + ∆t (φ0 2µf ε(v?f ), ε(v?f ))
? ?
+ N k∆t div (φ0 v?f )k2 + ∆t φ0 2 k−1
f vf , vf
6 (ρf φ0 v?f , v?f ) + ∆t (φ0 2µf ε(v?f ), ε(v?f ))
+ (1 + γ) N k∆t div (φ0 v?f ) + div ((1 − φ0 )y?s )k2
1 ?
1 ?
2 −1
?
?
+ (1 + γ) ∆t φ0 kf
vf −
y , vf −
y
∆t s
∆t s
+ 1 + γ−1 T ? 6 (1 + γ)|(y?s , v?f )|2 .
Hence, we obtain (81b), and thereby (A1 ).
Ultimately, the assumptions of Lemma 22 are satisfied, and it follows for all k > 1 that
n,k
n n
J(yn,k
s , vf ) − J(ys , vf )
6 1 − (1 + γ)−1
2 n,k−1 n,k−1
n
J(ys
, vf
) − J(yn
s , vf ) .
4.4 convergence analysis
n
Moreover, since J is quadratic, (yn
s , vf ) is a local minimum of J, and
| · | is induced by the functional Hessian of J via (80), we have that
n,k
n,k
n n
n,k
J(yn,k
− yn
− vn
s , vf ) − J(ys , vf ) = 2 (ys
s , vf
f )
2
for all k > 0. Thereby, the assertion follows.
4.4.2
Convergence analysis of diagonal split
The essence of the fixed-stress-like split (68)–(69) is the decoupling
of the mechanical displacement from the remaining variables (fluid
pressure and velocity). Such a split does neither fully conform with
a symmetry nor a saddle point structure of the governing equations.
In view of a convergence analysis aiming at employing some contraction argument or similar, it therefore cannot be expected that all
coupling terms can be simultaneously canceled by suitable testing as
often done [37]. To mitigate this complication, the concept of relative
stability will be exploited instead, allowing for a simpler discussion of
the coupling terms. In the following, the analysis is presented in two
steps: (i) a central abstract convergence result for positive real-valued
sequences satisfying a relative stability property is introduced; (ii) the
result is applied to the fixed-stress-like split (68)–(69) to show a priori
convergence.
For reference, we present the definition of r-linear convergence
[152].
Definition 12 (r-linear convergence). A sequence {xk }k converges to x?
r-linearly if there exists a positive sequence {k }k such that
|xk − x? | < k
where
∀k > 1,
k+1
< 1.1
k→∞ k
lim
4.4.2.1 Abstract convergence criterion based on relative stability
Consider a real-valued (positive) sequence {xk }k ⊂ R+ satisfying the
stability property:
There exists a constant c > 0 such that c
∞
X
xk+i 6 xk for all k ∈ N.
i=1
(83)
This relative stability criterion ensures r-linear convergence for subsequences, a weaker form of standard r-linear convergence, covering
both contractive and certain non-contractive sequences.
1 This last property is known as q-linear convergence of {k }k to 0.
85
86
iterative schemes for poromechanics
Lemma 23 (r-linear convergence for subsequences). Let {xk }k ⊂ R+
and c > 0 satisfy (83). Then there exists a subsequence {xkl }l which converges r-linearly with
xkl 6
min
m∈N
1
cm
m1 !kl
x0 .
Before, presenting the proof of Lemma 23, we state an auxiliary
result.
Lemma 24. Let {xk }k ⊂ R+ and c > 0 satisfying
(83). Then for any k ∈ N
1
and ε > 0 there exists some n ∈ {0, 1, ..., cε
} such that xk+n 6 εxk .
Proof. Let k ∈ N and ε > 0 be arbitrary but fixed. Assume without
loss of generality that xk > 0. Then the assertion follows
1 by contradiction: Assume it holds xk+i > εxk , for all i = 1, ..., cε ; we conclude
that it holds
c
∞
X
xk+i > c
i=1
1
dX
cε e
xk+i > cε
i=1
1
cε
xk > xk ,
which contradicts (83).
Proof of Lemma 23. The idea of the proof is to deduce q-linear convergence for subsequences first, and then conclude r-linear convergence.
Assume without loss of generality that x0 > 0. Let m ∈ N such that
1
1
cm > 1, and let ε := cm
< 1, such that cε
= m. By Lemma 24
there exists some n1 ∈ {1, ..., m} such that it holds xn1 6 εx0 . Analogously, for any i = 2, ..., there exists some ni ∈ {1, ..., m}, satisfying xPi−1 n +n 6 εxPi−1 n . All in all, defining {kl }l ⊂ N by setting
j
i
j=1 j
Pj=1
l
kl := j=1 nj for all l ∈ N, it holds that
xkl
l kl
6 εl x0 = ε kl
x0 6
1
cm
m1 !kl
x0 ,
(84)
since ε < 1 and nj 6 m for all j, such that it holds that
ε
l
kl
=ε
l
Pl
j=1 nj
6ε
l
lm
=
1
cm
m1
.
Since m has been left arbitrary so far, the a priori bound (84) holds
for m, minimizing the right hand side of (84), which finally yields the
assertion.
4.4.2.2
Convergence analysis of the fixed-stress split based on the concept
of relative stability
In the following, we prove linear convergence (for subsequences) of
the diagonally L2 -stabilized two-way split (68)–(69). The primary aim
4.4 convergence analysis
87
of the analysis is to determine ranges for the stabilization parameters βs , βf and βp , which a priori guarantee convergence; in addition,
we are going to suggest a practical (not necessarily optimal) set of
values. Hereby, any accurate optimization of (non-sharp) theoretical
convergence rates or stability constants is disregarded, in view of previous experience with the fixed-stress split for the quasi-static Biot
equations [173].
For the convergence analysis, the concept of relative stability and
r-linear convergence for subsequences is applied, as introduced in
the previous section. Ultimately, the final result states that it is sufficient to stabilize the mass conservation equation along the lines of the
fixed-stress split for the quasi-static Biot equations [37, 110, 111, 173],
in order to guarantee convergence. Furthermore, additional destabilization, i.e., negative stabilization, of the momentum equation for the
solid phase theoretically improves the convergence speed; we note,
that such destabilization is conceptually in agreement with a decoupling of the two symmetrically coupled momentum equations via a
Schur-complement ansatz. Fluid stabilization does not add any additional improvement.
To ease the presentation of the analysis, we introduce notation ((·))2A
for weighted squares
((ω))2A := (Aω, ω) ,
where ω can be a tensor-, vector- or scalar-valued function on Ω,
and the weight A is a function on Ω with adequate dimensionality
such that the above definition is well-defined. For uniformly positive
definite A, ((·))2A induces a norm, and we write k · k2A := ((·))2A ; though,
the use of non-positive definite weights is also permitted.
We state the main convergence result for the diagonally L2 -stabilized
two-way split (68)–(69).
Lemma 25 (Relative stability and convergence of the diagonally L2 -stabilized
n,k
n,k
two-way split). Let dk
− yn,k−1
∈ V, dk
− vn,k−1
∈ W,
s
s := ys
f := vf
f
n,k − pn,k−1 ∈ Q denote separate increments for k > 1. For
and dk
:=
p
p
any γ1 > 0 and γ2 ∈ (0, 2), and stabilization parameters
βs −
φ0 2 k−1
f
,
2∆t
βf 0,
2
1/2
1
CKorn,1 + 1/2
Kdr,φ ,min
0
,
βp >
γ2 ∆t
(85a)
(85b)
(85c)
88
iterative schemes for poromechanics
where A B for tensor-valued maps A and B on Ω iff. A − B is uniformly
positive definite, the scheme (68)–(69) satisfies the relative stability property
∞
X
1
γ2 k 2
k 2
kd k
+ 1−
ε(ds ) C
Hooke
∆t2 s ρs (1−φ0 )
2
k=m+1
∞
X
k 2
k 2
k 2
+
kdf kρf φ0 + ∆t ε(df ) φ 2µ + dp (1−φ0 )2
0
f
k=m+1
6
1 m 2
γ1 + γ2
2
kd k
kε(dm
2 −1 +
s )kCHooke
2 s βs + φ0 ∆tkf
2
∆t m 2
∆t m 2
kdf kβf +
+
dp
2
2
1/2
+
C
β p +
κs
2
1
Korn,1
1/2
K
dr,φ0 ,min
γ1 ∆t
(86)
for any m ∈ N. Furthermore, it is r-linearly convergent (modulo subsequences) if
(1−φ0 )2
κs
is uniformly positive.
Proof. By subtracting (68)–(69) at iteration k and k − 1, k > 2, we
obtain for the increments
dk
?
k
k−1
), y?s
ρs (1 − φ0 ) s2 , y?s + CHooke ε(dk
s ), ε(ys ) + βs (ds − ds
∆t
(87a)
k
ds
?
2 −1
− dk
, y?s = 0,
dk
p , div ((1 − φ0 )ys ) − φ0 kf
f −
∆t
dk
?
?
k
k−1
f
ρf φ0 , vf + φ0 2µf ε(dk
), v?f
f ), ε(vf ) + βf (df − df
∆t
(87b)
k−1
ds
?
2 −1
− dk
dk
, v?f = 0,
p , div (φ0 vf ) + φ0 kf
f −
∆t
!
(1 − φ0 )2 dk
p
k−1
, p? + βp (dk
), p?
(87c)
p − dp
κs
∆t
?
dk−1
s
k
?
+ div φ0 df , p + div (1 − φ0 )
, p = 0.
∆t
4.4 convergence analysis
89
k
?
k
?
Testing (87) with y?s = dk
s , vf = ∆t df , and p = ∆t dp , summing
up the three equations, and finally summing over iteration indices
k = m + 1, ..., M, for arbitrary m < M, yields
M
X
k=m+1
1
kdk k2
+ ε(dk
s)
∆t2 s ρs (1−φ0 )
M
X
+
2
CHooke
2
+ kdk
f kρf φ0
2
ε(dk
f ) φ 2µ
0
f
+ ∆t
+
dk
p
|
{z
}
=:T1
M
X
k
k−1
dk
)
p , div (1 − φ0 )(ds − ds
k=m+1
{z
|
}
=:T2
M
X
+ ∆t
|
k=m+1
k ds
dk−1
dk
s
s
2 −1
k
k
k
.
,
−
φ
k
,
d
φ0 2 k−1
d
−
d
−
0
f
f
f
f
f
∆t
∆t
∆t
{z
}
=:T3
(88)
We discuss the terms T1 , T2 and T3 separately. For the stabilization terms in T1 , weapply binomial identities of type (a − b)a =
1
2
2
2 and telescope sums, resulting in
2 a − b + (a − b)
1
T1 =
2
"
M
X
M 2
m 2
ds βs − ((ds ))βs +
k−1 2
dk
s − ds
βs
#
k=m+1
∆t
+
2
"
∆t
+
2
"
M
X
M 2
m 2
df β − ((df ))βf +
k−1 2
dk
f − df
β
f
#
f
k=m+1
dM
p
2
βp
−
dm
p
2
βp
M
X
+
dk
p
− dk−1
p
#
2
βp
.
k=m+1
(89)
For the coupling term T2 we apply summation by parts, leading to
M
m
T2 = dM
− dm
p , div (1 − φ0 )ds
p , div ((1 − φ0 )ds )
−
M
X
k−1
dk
, div (1 − φ0 )dk−1
p − dp
s
.
(90)
k=m+1
For the coupling term T3 , simple expansion and reformulation, aiming at constructing quadratic terms present on the left hand side
of (88), and gathering those, respectively, results in
T3 = −∆t
(1−φ0 )2
κs
h
i
k−1
k
k−1
k
k−1
βs (dk
), dk
), dk
), dk
s − ds
s + ∆t βf (df − df
p
f + ∆t βp (dp − dp
k=m+1
=
2
M
X
k=m+1
dk
f −
k−1
dk
s + ds
2∆t
1
1
2
kdm
+
s kφ0 2 k−1 −
f
2∆t
4∆t
M
X
k=m+1
2
−
φ0 2 k−1
f
1
dM
s
2∆t
k−1 2
dk
s − ds
φ0 2 k−1
f
2
φ0 2 k−1
f
(91)
.
90
iterative schemes for poromechanics
Inserting (89)–(91) into (88) and re-ordering terms, yields
M
X
k=m+1
1
kdk k2
+ ε(dk
s)
∆t2 s ρs (1−φ0 )
+∆t ε(dk
f)
2
φ0 2µf
+ dk
p
2
CHooke
2
+ kdk
f kρf φ0
2
(1−φ0 )2
κs
M
2
X
1 M 2
k−1
+
ds
+
dk
s − ds
βs
βs
2
k=m+1
M
2
X
2
∆t
k−1
dM
+
dk
+
f
f − df
βf
βf
2
k=m+1
M
2
X
2
∆t
k−1
dM
+
dk
+
p
p − dp
βp
βp
2
k=m+1
+ ∆t
M
X
dk
f −
k=m+1
k−1
dk
s + ds
2∆t
2
φ0 2 k−1
f
M
X
2
1
1
k−1
dM
dk
+
s
s − ds
φ0 2 k−1
2∆t
4∆t
f
k=m+1
M
M
− dp , div (1 − φ0 )ds
{z
}
|
+
2
φ0 2 k−1
f
=:T4
M
X
m
k
k−1
k−1
((1
)
= − dm
,
div
−
φ
)d
−
d
−
d
,
div
(1
−
φ
)d
0
0
p
s
p
p
s
|
{z
} k=m+1
=:T5a
|
{z
}
=:T5b
1
∆t
∆t
1
2
2
m 2
kdm
((dm
+
s kφ0 2 k−1 + ((ds ))βs +
f ))βf +
f
2∆t
2
2
2
dm
p
2
βp
.
(92)
In the next step, we discuss the coupling terms T4 , T5a and T5b .
The coupling term T4 can be combined with terms on the left hand
side of (92), generating only quadratic terms. For this, considering
?
all terms of (92) involving dM
s , revisiting (87c), tested with ys =
4.4 convergence analysis
dM
s , suitable expansion and reformulation, and ultimately discarding
some positive terms, yields
2
1
2
M
kdM
s kρs (1−φ0 ) + ε(ds )
2
CHooke
∆t
2
1 M 2
1 M
ds
ds − dM−1
+
+
− T4
s
βs
βs
2
2
+ ∆t dM
f −
M−1
dM
s + ds
2∆t
2
+
φ0 2 k−1
f
1
dM
s
2∆t
2
φ0 2 k−1
f
2
1
M−1
dM
s − ds
φ0 2 k−1
4∆t
f
M
2
d
dM
1
s
M−1
2 −1
M
ds
+ ∆t φ0 kf
, s
df −
=
βs
2
∆t
∆t
+
+ ∆t dM
f −
M−1
dM
s + ds
2∆t
2
+
2
φ0 k−1
f
2
1
M−1
dM
s − ds
φ0 2 k−1
4∆t
f
1
1 M−1 2
M−1
ds
+
ds
=
βs
2
2∆t
1
dM
s
2∆t
2
φ0 2 k−1
f
+
+ ∆t dM
f −
>
2
dM−1
s
2∆t
φ0 2 k−1
f
+
2
φ0 2 k−1
f
∆t
dM
f
2
2
φ0 2 k−1
f
1 M−1 2
ds
φ 2 k−1 .
βs + 0 ∆tf
2
(93)
In order to bound from above the coupling terms T5a and T5b , we employ the definitions of Kdr,φ0 ,min and CKorn,1 in addition to the product rule, the Cauchy-Schwarz inequality and Young’s inequality. Both
coupling terms will be treated similarly. For any γ1 > 0, we obtain
for T5a
m
m
m
T5a = dm
p , ∇ φ0 · ds − dp , (1 − φ0 ) div ds
1
kε(dm
C1/2 +
6 dm
p
s )kCHooke
Korn,1
1/2
Kdr,φ0 ,min
2
1/2
CKorn,1 + 1/21
Kdr,φ ,min
γ1
2
2
0
kε(dm
6
dm
.
(94)
s )kCHooke +
p
2
2γ1
Similarly for T5b , we obtain for any γ2 > 0
T5b
M−1
γ2 X
2
6
ε(dk
s ) CHooke
2
k=m
2
1/2
1
CKorn,1 + 1/2
Kdr,φ ,min
0
+
2γ2
M
X
k=m+1
k−1
dk
p − dp
2
.
(95)
91
92
iterative schemes for poromechanics
Inserting (93)–(95) into (92), yields
M−1
X
k=m+1
γ2 1
k 2
kd
k
+
1
−
s
ρ
(1−φ
)
s
0
2
∆t2
M
X
+
2
k
kdk
f kρf φ0 + ∆t ε(df )
k=m+1
+
1 M−1 2
1
ds
φ 2 k−1 +
βs + 0 ∆tf
2
2
M−1
X
+ ∆t
dk
f −
k=m+1
k−1
dk
s + ds
2∆t
M−1
X
2
ε(dk
s)
CHooke
k=m+1
2
φ0 2µf
M−1
X
+ dk
p
2
(1−φ0 )2
κs
2
k−1
dk
s − ds
βs +
k=m+1
φ0 2 k−1
f
2∆t
2
φ0 2 k−1
f
M
2
X
∆t M 2
k−1
df
+
+
dk
f − df
βf
βf
2
k=m+1
∆t
+
2
6
!2
1/2
CKorn,1
M
2
2
X
M
k−1
+
−
dp
dk
p − dp
βp
βp
k=m+1
+
1
1/2
Kdr,φ
0 ,min
γ2 ∆t
γ + γ2
∆t
1
2
2
2
((dm
kε(dm
((dm
+ 1
s ))
s )kCHooke +
f ))βf
φ 2 k−1
2
2
2
βs + 0 ∆tf
!2
1/2
∆t
+
2
m 2
dp β +
p
CKorn,1 +
1
1/2
Kdr,φ
0 ,min
γ1 ∆t
2
dm
.
p
(96)
Finally, after choosing βs , βf and βp satisfying (85), and dropping
several positive terms in (96), we obtain
M−1
X
k=m+1
+
γ2 1
k 2
k
kd
+
1
−
ε(dk
s)
∆t2 s ρs (1−φ0 )
2
M−1
X
2
kdk
f kρf φ0
+ ∆t
2
ε(dk
f ) φ0 2µf
+
2
CHooke
κs
k=m+1
6
2
dk
p (1−φ0 )2
1 m 2
γ1 + γ2
2
kds k
kε(dm
+
s )kCHooke
φ0 2 k−1
f
2
2
βs + ∆t
∆t m 2
∆t m 2
kdf kβf +
+
dp
2
2
1/2
C
βp +
2
.
1
Korn,1
1/2
K
dr,φ0 ,min
γ1 ∆t
+
After all, relative stability in the sense of (83) can be deduced for any
choice for γ1 > 0 and γ2 ∈ (0, 2), since m and M have been chosen
arbitrary. By this the assertion follows.
Remark (Incompressible media). We note that in contrast to the undrained
split (66)–(67), the diagonally L2 -stabilized two-way split remains well de2
0)
fined in the extreme case of incompressible media, i.e., (1−φ
= 0. In
κs
theory convergence, is not guaranteed anymore, yet still it may be possible,
whereas the conditioning of the undrained split would degenerate.
dk
p
− dk−1
p
2
4.5 numerical tests
93
We close this section with suggesting a practical choice of stabilization parameters guided by the previous convergence analysis. We emphasize that one could optimize the effective stability constant in (86)
with respect to γ1 , γ2 , βs , βf , βp ; however, theoretical optimality
does not necessarily result in practical optimality, cf. [173] for an applicable discussion. Instead, a simple but possibly theoretically not
optimal choice is proposed.
Remark (A practical set of stabilization parameters). First of all, we
choose the moderate values γ1 = γ2 = 1 in oder to balance similar terms
on both sides of (86). We note that CKorn,1 can be safely approximated by
some multiple of K−1
dr,φ0 ,min ; if the porosity is constant, it is CKorn,1 = 0. For
2
(1−φ0 )
simplicity, assume φ0 is constant, then it is K−1
, where
Kdr
dr,φ0 ,min =
Kdr = Kdr,0,min denotes the standard bulk modulus. Finally, we follow the
suggestion of the stability property and choose the stabilization parameters
as small as possible. This results in the set
φ0 2 k−1
f
βs = −
,
2∆t
βf = 0,
βp =
(1 − φ0 )2
,
Kdr ∆t
which in particular means destabilization of the momentum equation of the
solid. However, we also highlight that merely utilizing pressure stabilization
and setting βs = βf = 0 does also result in guaranteed convergence, in the
style of the fixed-stress split for the quasi-static Biot equations.
4.5
numerical tests
The aim of this section is to perform a paramater study for various
choices of stabilization values based on the above analyses, in addition with to ad-hoc choices motivated by the analyses or experience
of the classical Biot equations. For this aim, we use two classic benchmark problems, the swelling and footing problems. In addition, we
consider a perfusion-like problem to use as reference for our applications of interest. We note that each problem is loaded on a different
equation: The swelling on the fluid, the footing on the solid and the
perfusion on the mass balance.
the swelling test. This test consists in a 2D slab in absence of
volume forces. The fluid phase is subject to an inflow φ0 (2µf ε(vf ) − pI) n =
−pext n, pext (t) = 103 (1 − exp(4t2 )) on the left and null pressure on the
right, whereas above and below it uses a no-slip boundary condition
vf = 0. The boundary conditions for the solid are sliding on the bottom and left sides, whereas the rest of the boundary is of null traction
type (see Figure 10). The parameters used are given by: ρf = ρs =
1000, µf = 0.035, λs = 711, µs = 4066, κs = 103 , kf = 10−7 I, φ0 = 0.1,
all in SI units with Ω = (0, L)2 , L = 10−2 discretized using 10 elements per side. The finite element spaces used are: second order
94
iterative schemes for poromechanics
(a) Boundary conditions.
(b) Solution.
Figure 10: Swelling test at time t = 1s.
(a) Boundary conditions.
(b) Solution.
Figure 11: Footing test at time t = 0.5s.
Lagrangian elements for the solid and Taylor-Hood elements for the
fluid-pressure system, which satisfy the weighted inf-sup condition
from Theorem 9. Finally, a tolerance of 10−8 was used with respect to
the `∞ norm of the residual.
the footing test. This test also consists in a 2D slab in absence of volume forces where half of the boundary on top Γfoot =
(0.25, 0.75) × {1} is subject to an increasing load. More precisely, the
fluid phase is subject to an to a no-slip condition on Γfoot and null pressure in ∂Ω \ Γfoot . The boundary conditions for the solid are given by
an increasing load t(x, t) = (0, −105 t) on Γfoot , homogeneous Dirichlet conditions on the bottom ys = 0 and null Neumann conditions
everywhere else (see Figure 11). The parameters used are given by:
ρf = 1000, ρs = 500, µf = 10−3 , E = 3 · 104 , ν = 0.2, λs = Eν/((1 +
ν) ∗ (1 − 2ν)), µs = E/(2(1 + ν)), κs = 106 , kf = 10−7 I, φ0 = 10−3 , all
in SI units with Ω = (0, L)2 , L = 64 discretized using 10 elements per
side, with one simple refinement performed near the footing boundary. The finite element spaces used are: second order Lagrangian elements for the solid and Taylor-Hood elements for the fluid-pressure
system, which satisfy the weighted inf-sup condition from Theorem
9. Finally, a tolerance of 10−6 was used with respect to the `∞ norm
of the residual.
4.5 numerical tests
(a) Boundary conditions.
(b) Solution.
Figure 12: Perfusion test at time t = 1s.
the perfusion test. This test also consists in a 2D slab. Both
fluid and solid phases present homogeneous Dirichlet boundary conditions on the left and homogeneous Neumann conditions elsewhere
(see Figure 12). We set the scalar source term θ = 500, and the problem parameters are given
p by: ρf = 1000, ρs = 1000, µf = 0.03, E = 3 ·
4
4
10 , λs = 5 · 10 , R = E2 + 9λ2s + 2Eλs , µs = 0.25 (E − 3λs + R), κs =
106 , kf = 10−9 I, φ0 = 0.05, all2 in SI units with Ω = (0, L)2 , L = 0.01
discretized using 10 elements per side. The finite element spaces used
are: second order Lagrangian elements for the solid and Taylor-Hood
elements for the fluid-pressure system, which satisfy the weighted
inf-sup condition from Theorem 9. Finally, a tolerance of 10−8 was
used with respect to the `∞ norm of the residual.
4.5.1
Anderson acceleration
One key aspect of all the proposed schemes is that they can be interpreted as fixed point iterations. Although they present in general lower convergence rates than Newton methods, they have acquired higher interest recently due to the development of acceleration schemes. In particular we focus on Anderson acceleration, which
can be interpreted as a multisecant scheme, or as a preconditioned
GMRES method [189]. In general, consider a vector-valued function
g : RN → RN and the sequence
xk+1 = g(xk ).
By defining fk = g(xk ) − xk , Anderson acceleration of order m is
given as follows: For iteration k, set mk = min{m, k} and Fk =
k
(fk−mk , ..., fk ). Compute αk = (αk
0 , ..., αmk ) that minimizes
min
α=(α0 ,...,αmk )
s.t.
kF αk2
mk
X
(97)
αi = 1
i=0
2 Mechanical parameters obtained from [169], remaining ones from [128].
95
96
iterative schemes for poromechanics
iters
µ=1
µ = 10
µ = 100
None
9
25
–
m=1
7
10
24
m=2
5
9
18
m=5
6
9
16
Table 3: Iteration count for Bratu’s problem solved with a fixed point algorithm together with Anderson acceleration.
and then compute the next element as
xk+1 =
mk
X
αk
i g(xk−mk +i ).
i=0
The order m of the scheme is usually referred to as depth, due to the
use of m previous iterations. We implement this method by recasting
(97) as an unconstrained least-squares problem, and then invert its
optimality conditions using the QR factorization to avoid the possible
ill-conditioning of the normal equations [167]. To give an idea of the
impact this technique can have, we consider as in [189] the Bratu
benchmark problem: Find u in H10 (Ω) such that
−∆u = λeu
u=0
in
Ω,
(98)
on ∂Ω,
where Ω is the unit square. We solve problem (98) by iteratively solving the following problem: Given uk in H10 (Ω), find uk+1 in H10 (Ω)
such that
−∆uk+1 = λeuk
uk+1 = 0
on
in
Ω,
∂Ω.
(99)
Setting u0 = 0 and a tolerance of 10−10 for the `2 norm of the residual vector uk+1 − uk , we obtain the results shown in Table 3. As
expected, increasing the depth of the acceleration reduces the iteration count, but there are two interesting phenomena. The first is that
such a relation is not linear, meaning that using too many levels for
acceleration can actually deteriorate convergence. The second one is
that it can alleviate divergence, as seen from the case µ = 100, which
does not converge without acceleration.
4.5.2 Undrained split sensitivity analysis
In this section, we study the robustness of the undrained scheme with
respect to the parameters N, kf and highly oscillatory porosities φ0 .
For this aim we use the swelling test, with the given parameters. For
each parameter we present the number of iterations and the average
4.5 numerical tests
κs
103
# iters.
kf
# iters.
C
# iters.
9
10−10
20.27
1
21.91
104
20.55
10−11
49.1
2
22.27
105
84.82
10−12
99.63
3
25.45
–
10−13
–
4
54
106
(a) Bulk modulus.
(b) Permeability.
(c) Porosity φ0 = Πi sin(Cxi /L).
Table 4: Undrained split sensitivity analysis: Average iteration count for
varying (a) Bulk modulus (b) Permeability and (c) Porosity. Nonconvergence denoted with –.
convergence rate, computed as the mean of the convergence rates
between the ones obtained from the second half of the simulation.
This last choice is performed because usually initial timesteps do not
present a fully developed swelling regime and thus converge fast,
which does not allow for the computation of the empirical convergence rates in all cases. The scheme presents deterioration in convergence in accordance to Theorem 11 with respect to all considered
parameters as shown in Table 4, where we allowed for a maximum of
100 iterations. We note that this method is particularly sensitive to the
bulk modulus κs , and also small permeabilities render the problem
much more difficult. Instead, the dependence on oscillating porosities
is mild.
4.5.3
Parameter study for diagonal split
In this section, we study the sensitivity of the diagonal split with respect to different combinations of parameters in both inf-sup stable
and unstable scenarios. More specifically, the analysis shown in Section 4.4.2 yields the novel fact that the solid can be destabilized, so
we compare this destabilization with classic combinations of parameters. We present only stabilization parameters dictated by the analysis
based on the swelling test, and set the varying parameters as
• κs ∈ {10k }12
k=2 ,
• kf ∈ {10−k }12
k=2 ,
• ρs = ρf ∈ {10k }7k=2 .
We note that our analysis is independent of approximation spaces. In
order to investigate potential effects of stability of the function spaces
onto the stability of the splitting, we consider the variations
• Solid P1 , fluid P1 and pressure P1 ,
• Solid P1 , fluid P2 and pressure P1 .
97
98
iterative schemes for poromechanics
We do not consider the fully stable case where the solid is also approximated with second order elements, as it is not of practical relevance.
We solve the coupled problem using different solvers based on the
two-way split (68)–(69) for stabilizations of the type
φ0 2 k−1
f
,
∆t
βf = β̂f φ0 2 k−1
f ,
βs = β̂s
2
(1 − φ0 )
,
βp = βˆp
∆t Kdr
with tuning parameters β̂s , β̂f , βˆp . We consider in particular the sets
listed in Table 5.
ID
β̂s
β̂f
βˆp
FS0,0,0
0
0
0
Unstabilized split
FS0,0,1
0
0
1
Classic fixed-stress scheme.
FS−0.5,0,1
− 12
0
1
FS with destabilized ys .
FS−1,0,1
−1
0
1
Full destabilization of ys .
Description
Table 5: Considered stabilizations in the context of diagonally stabilized
splits.
As in previous tests, performance is measured in terms of the average number of iterations throughout the entire simulation, with nonconvergence established whenever a solver requires more than 200
iterations.
4.5.3.1
Unstable discretization
We consider the inf-sup unstable family P1 − P1 − P1 .
dependence on solid bulk. In Table 6, the iteration counts for
varying κs are displayed. We observe that FS0,0,0 converges as long as
the coupling strength regarding the ys -p coupling is weak. All p stabilized schemes are robust with respect to variations in κs ; in particular
no inf-sup stability is required. Also, destabilizing the ys equation
while keeping full p stabilization does not make big difference in this
scenario.
dependence on permeability. In Table 7, the iterations counts
for varying kf are displayed. Here, a maximal count of 500 iteration
is used to obtain a clearer presentation. We observe that lower permeabilities, render the problem more difficult for the diagonal split.
Two possible explanations for this are that (i) decreasing the permeability leads to ill-conditioning of the ys -vf blocks and (ii) for lower
permeability the ellipticity of the ys -vf block looses its dominance. In
4.5 numerical tests
κs
FS0,0,0
FS0,0,1
FS−0.5,0,1
FS−1,0,1
102
3.9
3.8
3.0
3.0
103
5.9
4.0
4.0
4.0
104
7.6
4.0
3.9
4.0
105
7.7
4.0
3.9
4.0
106
–
4.0
3.9
4.0
107
–
4.0
3.9
4.0
108
–
4.0
3.9
4.0
1012
–
4.0
3.9
4.0
Table 6: P1 − P1 − P1 elements: Average iteration count of the fixed-stress
based solvers for a varying κs in the swelling test. Non-convergence
denoted by –.
such case, a Cahouet-Chabard type split as proposed in Section 4.3.2
may add significant stabilization. Also, destabilizing the solid equation does not yield better results than a simple p stabilization. In fact,
the simpler p stabilization gives the best result for low permeabilities,
not necessarily for larger permeabilities.
kf
FS0,0,0
FS0,0,1
FS−0.5,0,1
FS−1,0,1
10−2
–
2.0
2.0
2.0
10−4
–
2.0
2.0
2.0
10−6
–
3.0
3.0
3.0
10−7
–
4.0
3.9
4.0
10−8
–
12.5
13.2
14.1
10−9
–
118.7
126.2
140.3
10−10
–
–
–
–
10−11
–
–
–
–
10−12
–
–
–
–
Table 7: P1 − P1 − P1 elements: Average iteration count of the fixed-stress
based solvers for a varying kf in the swelling test. Non-convergence
denoted by –.
dependence on densities. In Table 8, the iterations counts for
varying ρs = ρf are displayed. We observe that the larger the denisties,
the harder the problem becomes to solve. Destabilizing the solid equation does not yield better results.
dependence on bulk drain modulus. In Table 9, the iterations counts for varying Kdr (with same Poisson ratio) are displayed.
We observe that a lower Kdr yields a more difficult problem. It is par-
99
100
iterative schemes for poromechanics
ρs = ρf
FS0,0,0
FS0,0,1
FS−0.5,0,1
FS−1,0,1
102
–
4.0
3.9
4.0
103
–
4.0
3.9
4.0
104
–
4.0
3.9
4.0
105
–
4.0
3.9
4.0
106
–
4.0
4.0
4.0
107
–
6.4
6.8
7.5
108
–
18.4
18.7
19.4
Table 8: P1 − P1 − P1 elements: Average iteration count of the fixed-stress
based solvers for a varying ρs = ρf in the swelling test. Nonconvergence denoted by –.
ticularly interestig that the full destabilization of the solid yields best
results in this case.
Kdr
FS0,0,0
FS0,0,1
FS−0.5,0,1
FS−1,0,1
47.77
–
–
–
–
477.7
–
77.5
50.9
26.9
4777
–
18.5
14.5
11.5
47770
–
7.6
6.6
6.6
477700
7.4
4.0
3.9
4.0
4777000
3.3
2.9
2.9
3.0
Table 9: P1 − P1 − P1 elements: Average iteration count of the fixedstress based solvers for a varying Kdr in the swelling test. Nonconvergence denoted by –.
acceleration in a demanding scenario. In practice, Anderson acceleration yields more robust schemes, in the sense that the
choice of the optimal set of stabilization parameters is less critical. For
the default parameter case, we compare the performance of accelerated splits, see Table 10. We consider the default parameter set except
fir kf = 10−9 , κs = 108 , which render the problem more difficult. In
Table 10, the iterations counts for different accelerations are displayed.
We observe that in addition to improving convergence, Anderson acceleration allows the unstabilized split to converge. In particular, note
that acceleration with solid destabilization yields a large reduction in
the iteration count.
4.5 numerical tests
FS0,0,0
FS0,0,1
FS−0.5,0,1
FS−1,0,1
None
–
118.7
126.2
140.3
AA(1)
–
76.8
43.9
54.6
AA(3)
–
39.2
36.5
45.0
AA(5)
35.1
36.3
32.8
37.3
Table 10: P1 − P1 − P1 elements: Average iteration count of the fixed-stress
based solvers for different accelerations in the swelling test. Nonconvergence denoted by –.
4.5.3.2
Partially inf-sup stable discretization
We consider a P1 − P2 − P1 discretization which is inf-sup stable for
the vf -p coupling. We consider only parameter studies regarding κs
and kf .
dependence on solid bulk: In Table 11, the iteration counts
for varying κs are displayed. We observe that the only difference with
respect to the unstable case is that FS0,0,0 converges.
κs
FS0,0,0
FS0,0,1
FS−0.5,0,1
FS−1,0,1
102
3.9
3.4
3.0
3.0
103
5.8
4.0
3.9
4.0
104
7.0
4.0
3.9
4.0
105
7.5
4.0
3.9
4.0
106
7.6
4.0
3.9
4.0
107
7.6
4.0
3.9
4.0
108
7.6
4.0
3.9
4.0
1012
7.6
4.0
3.9
4.0
Table 11: P1 − P2 − P1 elements: Average iteration count of the fixedstress based solvers for a varying κs in the swelling test. Nonconvergence denoted by –.
dependence on permeability. In Table 12, we display the iterations counts for varying kf . Here, a maximal count of 500 iteration is
used for better demonstration of the dependence on the permeability.
We observe that again lower permeabilities yield a more difficult problem. Comparing the results for the P1 − P2 − P1 and P1 − P2 − P1
discretizations, we note that inf-sup stability in the fluid allows for a
significant improvement on the performance. Also, in contrast to the
unstable case, destabilizing the ys equations greatly improves performance.
101
102
iterative schemes for poromechanics
kf
FS0,0,0
FS0,0,1
FS−0.5,0,1
FS−1,0,1
10−2
2.0
2.0
2.0
2.0
10−4
2.0
2.0
2.0
2.0
10−6
3.6
2.9
3.0
3.0
10−7
7.6
4.0
3.9
4.0
10−8
–
7.6
6.6
6.7
10−9
–
18.5
14.5
11.5
10−10
–
78.7
51.0
26.6
10−11
–
366.6
222.2
–
10−12
–
–
–
–
Table 12: P1 − P2 − P1 elements: Average iteration count of the fixedstress based solvers for a varying kf in the swelling test. Nonconvergence denoted by – (more than 500 iterations in this case).
acceleration in a demanding scenario. As before, we consider Anderson acceleration for demanding cases where kf = 10−9 , κs =
108 . In Table 13, the iterations counts for different accelerations are
displayed. We observe similar behavior to the unstable case, where
most prominently acceleration reduces the significance of parameter
tuning.
FS0,0,0
FS0,0,1
FS−0.5,0,1
FS−1,0,1
None
–
18.5
14.5
11.5
AA(1)
–
12.9
11.2
11.2
AA(3)
–
11.3
9.8
9.2
AA(5)
25.6
10.4
9.0
8.2
Table 13: P1 − P2 − P1 elements: Average iteration count of the fixed-stress
based solvers for different accelerations in the swelling test for kf =
10−9 . Non-convergence denoted by –.
dependence on bulk drain modulus. We investigate in what
sense the ratio between the elasticity and the permeability does affect the performance of the splittings. For this, we start off with a
lower permeability kf = 1e − 9 and then increase Kdr . In Table 14,
the iterations counts for varying Kdr (with same Poisson ratio) are
displayed. We observe that low bulk drain is associated to higher iteration counts. This is an interesting fact, as it implies that the reaction
term in the mechanics is not adequately treated, and it could be alleviated with a Cahouet-Chabard-type splitting as shown for the fluid
case as in Section 4.3.2. Note that this behavior is in accordance to the
dependence of the theoretical stability constant on it.
4.5 numerical tests
Kdr
FS0,0,0
FS0,0,1
FS−0.5,0,1
FS−1,0,1
47.77
-
139.8
147.0
-
477.7
-
15.9
16.5
17.7
4777
-
4.0
3.9
4.0
47770
-
3.0
3.0
3.0
477700
2.3
2.0
2.0
2.0
Table 14: P1 − P2 − P1 elements: Average iteration count of the fixedstress based solvers for a varying Kdr in the swelling test. Nonconvergence denoted by –.
4.5.3.3
Comparison with 3-way splits
We include a similar study for corresponding 3-way split. Here, we
consider solely the P1 − P2 − P1 discretization with parameter studies for varying κs and kf . Furthermore, since the 3-way split includes
mixing, we do not tune the mixing parameters by hand, but employ
fixed mixing with α1 = α2 = 1 and apply Anderson acceleration
with depth 5. This also mimics the more practical scenario in which
the 3-way split is used as a preconditioner, as Anderson acceleration
is equivalent to a preconditioned GMRES. Thereby, a direct comparison with the above study is more difficult; it is obvious the 3-way
splits are inferior to their 2-way versions, specially since the coupling
of the vf -p block is very strong. Here, we consider only a short list
of different stabilization parameters β̂s , β̂f , βˆp based on the previous
studies.
dependence on solid bulk. We display the iteration counts in
Table 15. Note that the iteration counts are stable and yield more or
less the same results independent of the exact choice of stabilization
parameters. This requires, in comparison to the accelerated two-way
split, around 6 times as many iterations. However, the purpose of the
3-way split should be rather seen as a good basis for a preconditioner.
dependence on permeability. In Table 16, the iterations counts
for varying kf are displayed. Here, a maximal count of 500 iteration is
used for better demonstration of the dependence on the permeability.
We observe that performance quickly deteriorates for low permeabilities. Comparing the iteration counts with the 2-way split, the ratio is
moderately stable between 7 and 10 with kf ∈ {10−9 , 10−10 }. This also
explains why for even lower permeabilities, the scheme seems to not
converge, or here actually converge merely very slowly. Two slowingdown effects are included which are due to decreased permeability
values. In this regime it could be interesting to investigate tailored
splits.
103
104
iterative schemes for poromechanics
κs
FS0,0,1
FS−0.5,0,1
FS−0.5,0,0.5
FS−1,0,1
102
22.1
22.2
22.8
24.3
103
23.3
24.4
25.0
25.0
104
23.9
23.9
24.0
24.3
105
23.2
23.3
24.9
23.7
106
23.2
23.2
24.7
23.7
107
23.2
23.2
24.7
23.7
108
23.2
23.2
24.7
23.7
1012
23.2
23.2
24.7
23.7
Table 15: 3 way version of diagonal split with P1 − P2 − P1 elements: Average iteration count for varying κs in the swelling test. Nonconvergence denoted by –.
kf
FS0,0,1
FS−0.5,0,1
FS−0.5,0,0.5
FS−1,0,1
10−2
15.7
15.8
15.8
16.1
10−4
16.3
16.3
16.3
16.6
10−6
17.4
17.8
18.0
18.2
10−7
23.2
23.2
24.7
23.7
10−8
42.0
43.8
50.0
41.9
10−9
73.0
75.6
78.0
81.3
10−10
200.1
192.2
230.8
205.9
10−11
–
–
–
–
10−12
–
–
–
–
Table 16: Three way version of diagonal stabilized split with P1 − P2 − P1
elements: Average iteration count for varying kf in the swelling
test. Non-convergence denoted by – after 500 iterations.
4.5.4
Schemes comparison
In this section we compare the proposed approaches, i.e. undrained,
diagonally stabilized and three-way, in all three proposed tests, where
we vary: The polynomial degree of approximation of the displacement, the bulk modulus and the depth of acceleration.
swelling test. We show results in Table 17. We note that the infsup stability of the displacement plays no role, and the fixed-stress
splitting scheme proved very robust in all the tested scenarios.
footing test. We present results in Table 18. We note that in this
test the undrained scheme exhibited lower iteration counts. Its success can be explained by the lower bulk modulus used, and instead
4.5 numerical tests
avg iters.
None
AA(1)
AA(5)
Undrained
46.8
25.7
14.5
Diagonal
4.9
3.7
3.6
3-way
200
108.8
33
(a) Solid P1 , ks = 104 .
avg iters.
None
AA(1)
AA(5)
Undrained
47.5
26.2
13.8
Diagonal
4.7
3.6
3.5
3-way
200
108.6
33.3
(b) Solid P2 , ks = 104 .
avg iters.
None
AA(1)
AA(5)
Undrained
–
–
–
Diagonal
4.9
3.7
3.6
3-way
200
111.6
34.3
(c) Solid P1 , ks = 108 .
avg iters.
None
AA(1)
AA(5)
Undrained
–
–
–
Diagonal
4.7
3.7
3.6
3-way
200
111.6
34.3
(d) Solid P2 , ks = 108 .
Table 17: Iteration count for all tested scenarios in the swelling test.
105
106
iterative schemes for poromechanics
avg iters.
None
AA(1)
AA(5)
Undrained
19.84
9.26
7.4
Diagonal
–
134.44
17.64
3-way
200
198
68.6
(a) Solid P1 .
avg iters.
None
AA(1)
AA(5)
Undrained
73.44
25.4
16.9
Diagonal
–
153.46
31.42
3-way
200
195.5
126.4
(b) Solid P2 .
Table 18: Iteration count for all tested scenarios in the footing test.
avg iters.
None
AA(1)
AA(5)
Undrained
–
111.64
51.45
Diagonal
18.36
10.27
9
3-way
200
182.455
106
(a) Solid P1 .
avg iters.
None
AA(1)
AA(5)
Undrained
–
134.36
50.18
Diagonal
14.64
9.36
8.09
3-way
200
195.545
103.182
(b) Solid P2 .
Table 19: Iteration count for all tested scenarios in the perfusion test.
the initial failure of the fixed-stress scheme is due to the permeability,
which is very low.
perfusion test. We present the results obtained in Table 19. The
behavior of this test is similar to the swelling one, with the fixed
stress showing a marked robustness. The undrained scheme instead
presents difficulties in attaining convergence without acceleration.
4.5.5
Comparison of splitting versus monolithic approaches
In this section we present a comparison, in terms of computational
time, between the proposed splitting schemes and a monolithic approach. We consider the swelling test and we choose the L2 S−0.5,0,1
(labelled L2 S) as it yields the best performance for this problem. The
default stopping criterion for GMRES iterations is adopted for the
monolithic scheme, with a relative tolerance equal to 10−8 . For the
4.6 iterative schemes for cardiac poromechanics
107
splitting scheme, the convergence tests for the linear system solved
at each iteration is slightly relaxed, up to 10−6 , but the (relative) tolerance of the stopping criterion for the iterative splitting scheme is
also set to 10−8 , on the `∞ norm of the residual. We compare the
computational cost, measured by the average wall time per time step,
calculated on a sequence of five consecutive time steps. Both formulations are solved using P1/P2/P1 finite elements, and the number
of degrees of freedom is controlled by the number of nodes on each
side of the domain.
The results of the comparison are reported in Table 20. The iterative
schemes exhibit a better scaling with respect to the number of degrees
of freedom. In particular, for problems with over 105 degrees of freedom (given by using 100 or more elements per side on the square
domain) the wall time of the split scheme is consistently lower than
of the monolithic approach. Also, the ratio between both solution
times decreases monotonically with respect to the degrees of freedom as shown in the last column of the table, meaning that in this
test case the superiority of iterative splitting schemes increases with
the discrete problem size, which makes them a competitive solution
strategy for addressing realistic scenarios, especially when considering tailored, possibly scalable preconditioners for the single subproblems.
Nodes per side
dofs
L2 S [s]
Monolithic [s]
ratio (L2 S / Mono.)
50
28205
3.08
1.92
1.6042
100
111405
11.62
15.61
0.7444
150
249605
31.94
46.57
0.6858
200
442805
61.79
128.49
0.4809
250
691005
125.04
254.93
0.4905
300
994205
196.97
569.36
0.3459
Table 20: Wall time [s] of the different approaches for increasing number of
degrees of freedom.
4.6
iterative schemes for cardiac poromechanics
In this section we test the proposed methods on an intermediate
model which considers a nonlinear mechanics response, already presented in (58). This work resembles the nonlinear splitting schemes
proposed for a finite deformations Biot setting in [34], which is well
adapted to our linearize-then-discretize-then-split strategy. We show
the linearized equations and solve them with all of the previously developed schemes: undrained split, diagonal split and 3-way split; then
we compare them to a monolithic Newton. For all of them, we con-
108
iterative schemes for poromechanics
sider an initial iteration (ys 0 , v0f , p0 ), in practice set as the previous
timestep solution, i.e. (ys 0 , v0f , p0 ) = (ys n−1 , vn−1
, pn−1 ). In what folf
lows, superscripts refer to the iteration number unless the letter n is
used.
monolithic scheme. This is the classic monolithic formulation
used to solve nonlinear problems. At each iteration it looks for (δys i , δvif , δpi )
given (ys i , vif , pi ) such that
ρs (1 − φ)
(100)
δys i
∆t2
− div ∂ys P (F i ) : δys i + (1 − φ) ∇ δpi
(101)
δys i
i
δv
−
−φ2 k−1
= −Fs (ys i , vif , pi ),
f
f
∆t
ρf φ i
δvf − div φσvis (δvif ) + φ ∇ δpi
(102)
∆t
δys i
i
−
+φ2 k−1
δv
= −Ff (ys i , vif , pi ),
f
f
∆t
(1 − φ)2 i
(103)
δp
κs ∆t
δys i
+ div φδvif + div (1 − φ)
= −Fp (ys i , vif , pi ),
∆t
(104)
and then update variables through (ys i+1 , vi+1
, pi+1 ) = (ys i , vif , pi ) +
f
(δys i , δvif , δpi ).
undrained split. This is a two-way split. As before, consider
N = κs /(1 − φ0 )2 .
Step 1. Given (vif , pi ) find δys i such that
ρs (1 − φ)
δys i − div ∂ys P (F i ) : δys i
∆t2
φ2 −1
k δys i = −Fs (ys i , vif , pi ),
+ ∇(N div δys i ) +
∆t f
then update the displacement ys i+1 = ys i + δys i .
Step 2. Find (δvif , δpi ) such that
ρf φ i
i
i+1 i i
δvf − div φσvis (δvif ) + φ ∇ δpi + φ2 k−1
, vf , p ),
f δvf = −Ff (ys
∆t
(1 − φ)2 i
δp + div φδvif = −Fp (ys i+1 , vif , pi ),
κs ∆t
4.6 iterative schemes for cardiac poromechanics
109
then update solutions as (vi+1
, pi+1 ) = (vif , pi ) + (δvif , δpi ).
f
diagonal split. This scheme is also a two-way split, for it we
consider a given stabilization parameters βp and set βs = βf = 0, i.e.
consider the classic fixed-stress split.
Step 1. Given (vif , pi ) find δys i such that
ρs (1 − φ)
φ2 −1
i
i
i
δy
−
div
∂
P
(F
)
:
δy
+
k δys i = −Fs (ys i , vif , pi ),
s
ys
s
∆t f
∆t2
(105)
then update the displacement ys i+1 = ys i + δys i .
Step 2. Find (δvif , δpi ) such that
ρf φ i
i
i+1 i i
δvf − div φσvis (δvif ) + φ ∇ δpi + φ2 k−1
, vf , p ),
f δvf = −Ff (ys
∆t
(1 − φ)2 i
δp + βp δp + div φδvif = −Fp (ys i+1 , vif , pi ),
κs ∆t
then update solutions as (vi+1
, pi+1 ) = (vif , pi ) + (δvif , δpi ).
f
three-way split. This requires three stabilization terms βFS,1 , βFS,2 , βdiff .
Step 1. Given (vif , pi ) find δys i such that
ρs (1 − φ)
φ2 −1
i
i
i
δy
kf δys i = −Fs (ys i , vif , pi ),
−
div
∂
P
(F
)
:
δy
+
s
y
s
s
2
∆t
∆t
then update the displacement ys i+1 = ys i + δys i .
Step 2. Find δvif such that
ρf φ i
i
i+1 i i
δvf − div φσvis (δvif ) + φ ∇ δpi + φ2 k−1
, vf , p ),
f δvf = −Ff (ys
∆t
then update the fluid velocity as vi+1
= vif + δvif .
f
i
i
Step 3. Find δpFS and δpdiff such that
(1 − φ)2 i
δpFS + βFS,1 δpFS = −Fp (ys i+1 , vi+1
, pi ),
f
κs ∆t
and
(1 − φ)2 i
δpdiff
κs ∆t
+ βFS,2 δpdiff − βdiff div ∇ δpdiff = −Fp (ys i+1 , vi+1
, pi ),
f
then set an iteration increment by mixing both solutions as δpi =
αδpiFS + (1 − α)δpidiff and then update the pressure as pi+1 = pi +
110
iterative schemes for poromechanics
δpi . Note that we have not considered the separate coefficients βp
and βCC,1 . This is justified by the lack of an analytic expression for
the stabilization coefficients, and indeed, as they are computed numerically, this notation resembles better the implementation used.
Remark. In practice, the value of α depends the dominant physics.
Satisfactory results have been obtained for cardiac mechanics by using α = 0.9.
Remark. The Robin boundary condition in the equation for δpidiff of
the 3-way solver may give rise to different conditions on the pressure.
Indeed, in the limit case M A, the solid equations in such case
reads
ρs (1 − φ)
φ2 −1
2 −1 k
k
I+
dk
k
s − φ kf df + (1 − φ) ∇ dp = 0,
∆t2
∆t f
in Ω.
The boundary terms coming from the gradient of dk
p are then given
by
h(1 − φ) ∇ dk
p , viΩ
k
= −hdk
p , div((1 − φ)v)iΩ + hdp , (1 − φ)v · ni∂Ω
k
s
= −hdk
p , div((1 − φ)v)iΩ + hdp , (1 − φ)v · niΓD
k
+ hdk
p , (1 − φ)v · niΓRs + hdp , (1 − φ)v · niΓRm ,
where we have denoted the Robin boundary with ΓRs . This requires
s
s
that dk
p = 0 on ΓN ∪ ΓR .
4.6.0.1 Comparison with existing solver
In this subsection we introduce the energetically consistent solver presented in [49]. It consists of a prediction step and then an implicit coupling step, in which fixed point iteration is performed. This resembles
the classic Chorin-Temam solver [57, 181]. We have adapted it to our
simplified model for the sake of comparison, where we consider the
fluid with homogeneous boundary conditions for simplicity.
Step 1. Find ṽf n such that
*
+
ṽf n − vn−1
f
, w + 2µf hφε(ṽf n ), ε(w)i = 0
ρf φ
∆t
∀w.
k
Step 2.a. Given ys k , find (vk
f , p ) such that
*
+
n
vk
f − ṽf
ρf φ
, w − pk , div(φw)
∆t
ys k − ys n−1
2 −1
k
+ φ kf
vf −
, w = hρf φfn , wi
∆t
ys k − ys n
(1 − φ)2 k
n
k
(p − p ), q + q, div vf −
=0
∀q.
κs ∆t
∆t
∀w,
4.7 conclusions
111
k
k
Step 2.b. Given (vk
f , p ), find ys such that
ys k − 2ys n−1 + ys n−2
ρs (1 − φ)
,v
∆t2
+hP (F k ), ∇ vi − hhtrobin (ys k ), vii
ys k − ys n−1
k
k
2 −1
vf −
−hp , div((1 − φ)v)i − φ kf
, v = hρs (1 − φ)fn , i
∆t
where we have included the Robin boundary condition as hhtrobin (ys k ), vii.
Note that steps 2.a and 2.b are coupled by means of a fixed point iteration, which means that at each iteration of step 2 the mechanics
need to be solved. Our proposed strategies both act at the linearized
equations level, without the prediction step 1. This means that we
perform only one Newton iteration of the mechanics at each step 2.b,
which can be interpreted as a quasi-Newton method.
4.6.0.2 Numerical test
Here we report the iteration count for the proposed problem (same
as (58)) with each of the methods previously developed in Tables
21 and 22 for P1 and P2 elements for the solid respectively. Entries
with – mean that the iteration count arrived at 100 for 10 consecutive timesteps, so we stopped those simulations. All simulations were
performed for ad-hoc stabilization parameters, meaning that the L2
stabilization parameter is such that the number of iterations in the
first 10 timesteps in minimum.
First we note that, as expected, the use of a large bulk modulus, 108 ,
prevents the undrained scheme from arriving at convergence. Most
notably, the fixed-stress scheme also suffers from non-convergence
due to large bulk modulus, in contrast to the linear case. The difference is that the non-convergence of the fixed-stress can be alleviated
by means of acceleration. In the accelerated cases, the iteration count
is roughly four to five times that of the monolithic, which is then comparable to the performance in the linear case (where the reference iteration count is of course 1 for a monolithic solver). The three-way
split is instead more robust, and presents the interesting feature of
performing better with only one level of acceleration, which makes it
already appealing from a more practical perspective. Then, it is also
more robust and performs similarly to the fixed stress.
4.7
conclusions
In this chapter we developed splitting schemes for the linearized
poromechanics problem (7), given by the undrained split and the diagonally L2 -stabilized split with its 3-way variant. We tested them
in an implicit Euler time discretization in several numerical tests,
∀v,
112
iterative schemes for poromechanics
Solid P1
AA(0)
AA(1)
AA(5)
Monolithic
1.8
1.9
1.9
Undrained
–
–
–
Fixed-stress
–
7.2
6.6
CC
10.5
7.6
8.4
Table 21: Average iteration count in 0.3 seconds of simulation with the displacement approximated by first order elements.
Solid P1
AA(0)
AA(1)
AA(5)
Monolithic
1.6
1.6
1.6
Undrained
–
–
–
Fixed-stress
–
9
7.3
CC
23.1
10.8
12.3
Table 22: Average iteration count in 0.3 seconds of simulation with the displacement approximated by second order elements.
where we note that the choice of a splitting scheme strongly depends on the application of interest, due to the strong dependence
that each scheme has on the parameters. The undrained scheme performs very well in compressible scenarios but quickly deteriorates
as the bulk modulus increases. The diagonal split instead is very robust with respect to the bulk modulus, so it should be preferred in
quasi-incompressible or incompressible regimes. Neither of them are
capable of handling large densities or small permeabilities, and also
none of them obtain any improvement from the inf-sup condition
proved in Chapter 2.
The diagonal split presents two interesting features. On one side,
the 3-way split derived from it converges whenever the 2-way split
does. Although the iterations number is are considerably higher, the
3-way splits are better suited as preconditioners, and not as solvers,
so these results are indeed encouraging. On the other side, the analysis reveals the possibility of destabilizing the solid. Counterintuitive
as it seems, this technique does yield improvements in convergence,
which validates the result.
The ability of a splitting scheme hinges on the assumptions used
for the required stabilization. For instance, the undrained scheme requires the algebraic inversion of pressure, so it can be expected for it
to deteriorate whenever this operation is not available ((1 − φ)/κs →
∞). The diagonal L2 split is more difficult for having a clear intuition, but for instance if we consider the approximate Schur framework from the three-way splitting scheme only for the pressure stabilization coefficient βp , we can see that it comes from considering
a diffusion-dominant regime. Thus it can be expected for L2 stabi-
4.7 conclusions
lized schemes to present difficulties converging whenever the reaction block is dominant, meaning small permeability or large densities.
We have complemented the splitting schemes with Anderson acceleration, which is a general method to improve the convergence of
fixed-point iterations. It does not only improve the convergence of all
methods tested, but it also enables convergence in scenarios in which
it previously would not converge. One additional feature of Anderson acceleration, and probably the one that really highlights its use
in this framework, is that it reduces the relevance of the stabilization
parameters. This is indeed one fundamental aspect, as the additional
parameters are an important drawback of the presented methods.
We concluded this chapter with some preliminary results for cardiac poroelasticity, which show very promising results. As analytic
parameters are not available for the nonlinear elasticity case, we used
the ones that minimized the iteration count in the first ten timesteps.
This gives good results which are coherent with the ones obtained in
the linear case, except for the iteration counts for the 3-way split. The
use of adequate parameters yields a very small difference between the
2-way and 3-way splitting schemes, which suggest that in such scenarios the 3-way split could be used as a solver. This would present a
big speedup in terms of computational times, as all the physics seen
independently are elliptic problems.
113
N U M E R I C A L S O LV E R S F O R C A R D I A C P E R F U S I O N
In this chapter we present a novel perfusion model which considers
coronary circulation, its interaction with the beating heart and their
coupling with systemic circulation. Most of the work in this chapter is being prepared for publication [13]. This model requires two
ingredients: The first one is coronary arteries, and the second one
is the myocardium. Also, cardiac perfusion is part of the circulatory
system, so we consider our model to begin with the pressure in the
aorta and to end in the myocardial veins. Aortic pressure can be measured through non-invasive techniques (see, for example, [126, 131])
or obtained as part of a circulation model which considers the left
ventricle chamber [164], where the latter also holds for the pressure
in the myocardium veins.
Coronary arteries are divided into epicardial and intramural, the
former surround the heart whereas the latter are inside the myocardium.
A suitable model to describe epicardial coronary blood flow would
be the Navier-Stokes equations, but the blood dynamics in these vessels are not too complex, as they present Reynolds numbers in the
range of 25-500 [124], where the peaks are achieved in pathological
conditions such as the presence of plaque. This motivates the use of
simplified lumped models, which yield averaged information regarding flow and pressure. We present such models in Section 5.1, where
we extend the lumped 0D models presented in [157] to form an arbitrary network of vessels which, in contrast to classic formulations,
supports arbitrary combinations of Dirichlet and Neumann boundary conditions. With this feature, the model becomes more adequate
for the development of flow in a network. This approach considers
each vessel portion as an independent segment, with pressure and
flow as averaged quantities in each segment. The coupling of the segments is done by means of mass conservation and pressure continuity.
The intramural coronary vessels instead present a complex network
structure, with diameters in the range of 10–100 µm and very different mechanical properties [4]. A mathematical model accounting
for such small scales is not feasible, which motivates the use of a
multi-compartment poromechanics model [60, 128], where vessels are
grouped into a finite number of compartments with representative
parameters (see Figure 13). We consider these compartments to be
the arteries and capillaries only, as veins will be modeled differently,
but note that the framework is general and allows for an arbitrary
number of compartments.
115
5
116
numerical solvers for cardiac perfusion
Figure 13: Representation of multi-compartment model from [60].
In nonlinear poromechanics, the constitutive modeling of the myocardium is largely open, where one fundamental component is the
relationship between pressure and porosity. To the best of our knowledge, the only proposal of one such law based on real data has been
done in [44], which is the basis of the constitutive models used more
recently in [60]. With this in mind, we extend the thermodynamically consistent constitutive framework presented in [56] to the multicompartment scenario and study its mathematical properties, where
one key feature of our model is that it allows for the use of the mentioned laws from [44]. We make use of numerical tests to acquire
insight regarding the interactions between the different components
of the proposed model, as well as discuss different numerical strategies for the poromechanics problem, in particular regarding the performance of monolithic and iterative approaches. In a fully coupled
heart model considering the circulatory system, aortic pressure (the
main driver of flow in our model) depends on deformation, so we
propose decoupling the mechanics and circulation from the model,
which results in a one-way coupling strategy. This allows for our
model to be used as a post processing stage after an electromechanics simulation [162]. This chapter is structured as follows: In Section
5.1 we show the 0D coronary vessel model, in Section 5.2 we present
the myocardium model and the novel constitutive model, in Section
5.3 we present the coupled perfusion model, in Section 5.4 we show
the one-way coupling strategy and we show the numerical tests performed in Section 5.5.
5.1 mathematical modeling of the epicardial coronary vessels
5.1
mathematical modeling of the epicardial coronary
vessels
We present two models for the epicardial coronary vessels: (i) A very
simple tube in which flow can be described by a Bernoulli law, which
assumes steady and irrotational flow of an inviscid and incompressible fluid and (ii) the lumped 0D model from [157]. The latter is obtained from the Navier-Stokes equations by assuming a cylindrical
geometry and a flow profile on a cylinder section, then the advection term can be neglected and the resulting system integrated in the
entire domain.
• Bernoulli’s principle: Fluid continuity and Bernoulli’s principle are given by the following equations:
v1 S1 = v2 S2 ,
ρf 2
v + p + gz = constant,
2
where v is the velocity in a section of area S, p is its pressure, g is
gravity acceleration and z the section height. From them, given
two pressures p1 , p2 and the two corresponding areas S1 , S2 of
the tube, the surface flow Q = vi Si is given by
s
1 −1
1
2
−
,
(p1 − p2 )
Q=
ρf
S22 S21
where we neglect the difference in height, so z1 ≈ z2 . This relationship has the important drawback of neglecting the fluid
viscosity, but it enables a simple way of studying and validating the model when a pressure difference can be established. In
this case we compute from the Zygote coronary geometry (see
Figure 3) its total inlet and outlet areas, given by 11.392 mm2
and 5.688 mm2 respectively.
• Lumped 0D: This model, albeit simple, takes into account the
vessel compliance, fluid inertia and viscous effects [74]. We characterize a single vessel segment with the following parameters:
Length `, area A, wall thickness H, fluid density ρf , Young modulus of the vessel wall E, Poisson ratio of vessel wall ν and fluid
viscosity µf . The resulting equations are given by
L
∂Q
+ RQ + Pd − Pp = 0,
∂t
∂P
C
+ Qd − Qp = 0,
∂t
(106)
3/2
√
πHE
where R = KAr2` , L = ρAf ` , C = A η ` and Kr = 8πµf , η = 1−ν
2 .
The names R, L, C come from an analogy with these equations to
117
118
numerical solvers for cardiac perfusion
an RLC circuit, and the subindices d, p stand for distal and proximal. In our context, the “boundary conditions” 1 are given by
the inlet (proximal) and outlet (distal) pressures, which leaves
the variables Q, V, Qd and Qp . It is common practice to approximate the averaged quantities with one of the extremes, for instance Q ≈ Qd , which would be inadequate for the scenario
in which we impose both pressures. Other conditions can be of
interest, in particular for the case of a network of lumped models, and no systematic approach exists for this kind of scenario.
For this, we consider in each vessel segment two coefficients α
and β in (0, 1) which allow to interpolate between the distal and
proximal quantities:
Q = αQd + (1 − α)Qp
and
P = βPd + (1 − β)Pp ,
which yields the following system:
L
d(αQd + (1 − α)Qp )
+ R(αQd + (1 − α)Qp ) + Pd − Pp = 0,
dt
d(βPd + (1 − β)Pp )
C
+ Qd − Qp = 0.
dt
(107)
This problem has four unknowns Qd , Qp , Pd , Pp , meaning that
it requires two boundary conditions. Note that Dirichlet conditions are given by fixing Qd or Qp , whereas Neumann boundary conditions regard Pd and Pp , so that the proposed model
can handle any combination of conditions.
Remark. If L = C = 0, we obtain the well-known Poiseuille flow,
and lose dependence on α and β.
Remark. Experience has shown that these models, when used for coronary vessels, are extremely sensitive to C, which can generate unphysical behavior. For this reason, we consider C ≈ 0 in all applications in
what follows. We nevertheless keep C the presentation, as the approach
is general.
network of 0d vessels. We now formalize the coupling
between consecutive vessel segments. Consider a set of segments S, where we identify each segment with its distal and
proximal nodes as s = {sd , sp }. The set of all nodes will be denoted with N, and for a given node n ∈ N we consider its inlet
and outlet segments, ni and no respectively. Each segment can
1 The use of the expression “boundary condition” is widely used in this context. It is
of course not a precise notion, as a 0D model has no boundary, but it describes the
fact that the conditions required to close the model are given by inlet (proximal) and
outlet (distal) quantities.
5.1 mathematical modeling of the epicardial coronary vessels
b
0
a
1
2
c
3
Figure 14: Example network.
be described by equation (106) so that the following holds for
all s ∈ S:
Ls
d(αs Qsd + (1 − αs )Qsp )
s
s
− Pp
= 0,
+ Rs (αs Qsd + (1 − αs )Qsp ) + Pd
dt
s + (1 − βs )P s )
d(βs Pd
p
Cs
+ Qsd − Qsp = 0.
dt
(108)
For each node n ∈ N, the interface conditions are given by mass
conservation
X
X
Qid =
Qjp
i∈ni
j∈no
and continuity of pressures
i
j
Pd
= Pp
∀i ∈ ni , j ∈ no .
We note that these equations form a closed system of equations. For this, we give the details only for a bifurcation network, the conclusion can be formally argued by induction [157].
Consider for example the network from Figure 14. In this case,
S = {a, b, c} and N = {0, 1, 2, 3}. For each segment, we have two
equations and four variables, so 12 variables and 6 equations.
Then, there are three boundary nodes, which give 3 more equations. Finally, the bifurcation node gives 3 equations: 1 with the
conservation of mass and 2 for the pressure continuity, which
gives a total of 12 equations. We observe that this problem is
a differential algebraic equation of index 1, where the index
stands for the number of time derivations required in the algebraic equations to obtain time derivatives in all variables [52]
(see [157] for further details).
time discretization. We use the θ method, for which we
set the parameter θ ∈ [0, 1] and discretize the time interval [0, T ]
into NT equally spaced intervals such that 0 = t0 , t1 , ..., tNT = T
with ti = t0 + i∆t, i ∈ {0, ..., NT }, for a given timestep ∆t > 0. We
thus denote the approximation ηi ≈ η(ti ) for a generic quantity
ηi −ηi−1
η, consider the discretization dη
and use the θdt (ti ) ≈
∆t
i
i−1
in equations (108) to obtain
method η(ti ) ≈ θη + (1 − θ)η
the system
119
120
numerical solvers for cardiac perfusion
(Ls βs + ∆tRs βs θ)Qs,i+1
+ (Ls (1 − βs ) + ∆tRs (1 − βs )θ)Qs,i+1
p
d
s,i+1
s,i+1
+ ∆tθPd
− ∆tθPp
s
s
s
s
s,i
= (Ls βs − ∆tRs βs (1 − θ))Qs,i
d + (L (1 − β ) − ∆tR (1 − θ)(1 − β ))Qp
s,i
s,i
− ∆t(1 − θ)Pd
+ ∆t(1 − θ)Pp
∀s ∈ S,
(109a)
− ∆tθQs,i+1
∆tθQs,i+1
p
d
s,i+1
s,i+1
+ Cs αs Pd
+ Cs (1 − αs )Pp
s,i
s,i
= −∆t(1 − θ)Qd
+ ∆t(1 − θ)Qp
s,i
s,i
+ Cs αs Pd
+ Cs (1 − αs )Pp
∀s ∈ S,
(109b)
X
Qs,i+1
=
d
X
Qs,i+1
p
∀n ∈ N,
s∈no
s∈ni
P?r,i+1 = P?q,i+1
∀r, q ∈ ni ∪ no , r 6= q, ? ∈ {d, p}; n ∈ N.
(109c)
We have observed θ = 1 to yield a more robust scheme, so we
keep this choice in what follows.
5.1.1
Numerical tests
In this section we numerically study the network of lumped
models (109). In particular, we focus on the conditioning of the
resulting linear system, its initialization by means of finding
a steady state which is compatible with the initial boundary
conditions and its dependence on the parameters α and β.
5.1.1.1
Problem conditioning
Problem (109) is heavily ill-conditioned [20], mainly due to its
lack of a particular structure and the different scales of the problem parameters. In particular, the area of a coronary is small
(A ≈ 10−6 ), which yields large resistance terms R = O(A−2 ) ≈
10−12 . We devise a strategy for its numerical approximation, for
which we consider again the simple network from Figure 14 and
compute the condition number of the corresponding linear system (109) with NumPy [145]. One simple option to alleviate the
5.1 mathematical modeling of the epicardial coronary vessels
Parameters
Value
`
0.005 m
A
2 · 10−6 m2
ρf
1060 kg/m3
µf
0.035 Pa · s
H
10−4 m
E
105 Pa
C
0
∆T
10−2 s
Table 23: Parameters used for conditioning number test.
bad scaling of the resistance terms is to consider a right diagonal preconditioner P which equals 1 in the rows corresponding
to pressure degrees of freedom and R in flow degrees of freedom. We compute the condition number in the following scenarios: (i) reduced Navier-Stokes vs. Poiseuille (L = C = 0), (ii) with
vs. without diagonal preconditioner P, (iii) SI units (m, kg, s, Pa)
vs. scaled units (cm, g, s, kPa) and (iv) αs = βs = α ∈ {0, 0.5, 1}
for all s. We show the parameters used for this test in Table 23,
where the inlet pressure is pao and the oulet pressure is 9 kPa in
all outlets. The results obtained are shown in Table 24. We note
that the proposed preconditioner works well in all scenarios,
and is indeed what we use in practice combined with a GMRES
solver. The problem in general presents much better conditioning with the units (cm, g, s, kPa), and interestingly, mixing the
variables through α = 0.5 considerably improved conditioning
in the scaled case. The same conclusions hold for the Poiseuille
model, meaning that the right preconditioner improves conditioning in the SI system, but the gain is modest compared to
the one obtained by rescaling the problem.
5.1.1.2 Steady initial conditions
The time-dependence of model (109) is what gives it the ability
to incorporate inertia and compliance, but it means that it is sensitive to initial conditions. To obtain realistic initial conditions,
we propose performing simulation with the initial boundary
conditions fixed at t = t0 together with Aitken acceleration [3,
58] until a stationary solution is obtained. The use of Aitken
acceleration is motivated by its ease of implementation, and it
can be interpreted as an optimal relaxation for fixed point iterations. We briefly present what it consists in: Consider a fixed
point scheme xi+1 = g(xi ), i ∈ N, then for each vector xi , set
121
122
numerical solvers for cardiac perfusion
Scenario
α=0
α = 0.5
α=1
No prec, SI
2.01 · 1018
1.29 · 1018
1.33 · 1018
Prec, SI
3.58 · 1012
3.34 · 1011
3.91 · 1011
No prec, scaled
3.64 · 107
7.15 · 105
4.45 · 107
Prec, scaled
8.27 · 106
1.63 · 105
1.01 · 107
(a) Reduced Navier-Stokes.
Scenario
–
No prec, SI
1.32 · 1018
Prec, SI
3.37 · 109
No prec, scaled
26.18
Prec, scaled
13.92
(b) Poiseuille.
Table 24: Conditioning number for the reduced Navier-Stokes models.
xei = g(xi ) and the increment ¯i = xei − xi . The new iteration is
given by
xi+1 = xi + ωi µi ,
where the weight ωi is defined as
ωi = −
(¯i − ¯i−1 ) · (xi − xi−1 )
,
k¯i − ¯i−1 k2
∀i ∈ N.
In fact, ωi is the minimizer of
min kxi − xi−1 + ω(¯i − ¯i−1 )k2 .
ω
We tested the convergence to a stationary state in the simple bifurcation network considered in Figure 14 with the parameters
from Table 23 by measuring the error as
X
error =
errors ,
s
where errors represent the relative residual in segment s, given
by
errors =
αs Qsd + (1 − αs )Qsp +
s −P s
Pd
p
Rs
+ Qsd − Qsp
αs Qsd + (1 − αs )Qsp
.
A tolerance of 10−12 yields the iteration counts shown in Table 25. We show in Figure 15 the evolution of flow in the first
segment Q0 , where it can be appreciated that in fact the converged values at the steady state are the same. Note that convergence is almost immediate when using acceleration (≈ 20
iterations), whereas it can be very slow for non-accelerated scenarios (≈ 34000 iterations).
5.2 mathematical model for myocardial poromechanics
# iterations
αs = 0
αs = 0.5
αs = 1
No accel.
34575
34233
34351
Aitken
23
15
13
Table 25: Iteration required to achieve a stationary state with and without
acceleration for different values of αs , equal in all segments.
(a) No acceleration.
(b) Aitken.
Figure 15: Evolution of the flow in first segment during steady state iterations.
5.1.1.3 Dependence on α and β
To conclude, it is natural to ask whether the choice of α impacts
the model beyond the conditioning. For this, we simulated the
network for 1000 heartbeats to see the difference in the stationary dynamic for the inlet pressure profile pao shown in Figure
27 and an outlet of 8 kPa. We show the results of flow, distal
pressure and proximal pressure in Figures 16, 17 and 18 respectively. We note that there are no significant differences between
the solutions, so we prefer α = 0.5 for the improved conditioning of the system.
5.2
mathematical model for myocardial poromechanics
We present the multi-compartment variant of (6), with an additional
term in the stress tensor which accounts for the deformation induced
by activation. There are two approaches for this, the first one is to
additively decompose the stress tensor into passive and active parts
as P = Ppassive + Pactive , known as active stress [86]. The second one
uses a multiplicative decomposition of the tensor F through an intermediate configuration as Fb = F Fa [141]. Also, the mass conservation
equations hold for each of the NC compartment, and includes an additional interaction term in the form of a nonlinear reaction which
accounts for fluid exchange between compartments. The resulting
123
124
numerical solvers for cardiac perfusion
Segment #
α=0
α = 0.5
α=1
0
1
2
3
Figure 16: Flow Q = αQd + (1 − α)Qp for stationary dynamic of conditioning test.
Segment #
α=0
α = 0.5
α=1
0
1
2
3
Figure 17: Distal pressure for stationary dynamic of conditioning test.
5.2 mathematical model for myocardial poromechanics
Segment #
α=0
α = 0.5
125
α=1
0
1
2
3
Figure 18: Proximal pressure for stationary dynamic of conditioning test.
problem, using from now on an active stress approach, reads: Find
ys and ϕ such that
− div(P (F , ϕ) + Pa (F )) = 0
in
Ω,
(110a)
dϕi
− div (Ki (F ) ∇ pi (F , ϕ))
dt
NC
X
+
βij (pi (F , ϕ) − pj (F , ϕ)) = Jθi
in
Ω,
∀i ∈ {1, ..., NC },
j=1
(110b)
where we denoted with ϕ = (ϕ1 , ..., ϕNC ) the vector of all reference
porosities. This model is completed by the constitutive relations
P =
∂Ψ
(F , ϕ),
∂F
pi =
∂Ψ
(F , ϕ)
∂ϕi
∀i ∈ {1, ..., NC }
and the boundary conditions
on ∂Ω,
(P + Pa ) n = g(ys )
Ki ∇ p i · n = 0
on
∂Ω,
∀i ∈ {1, ..., NC }.
126
numerical solvers for cardiac perfusion
The active stress term is given by a fiber-oriented force modulated by
a prescribed function γ as
Pa (F , t) = γ(t)
(F f0 ) ⊗ f0
,
|F f0 |
where f0 represents a fiber orientation and γ, possibly also space dependent, represents the activation of the cardiomyocites (heart muscle cells), driven by the heart’s electro-physiology. The fiber orientation f0 is usually computed through rule-based methods, where a
Laplace problem with adequate boundary conditions is solved. The
standard procedure for generating fibers in the left ventricle is the
LDRB (Laplace-Dirichlet-Rule-Based) proposed in [16]. The activation
function instead largely depends on the scope of the model. It is a
well-known physiological fact that activation is driven by calcium concentration, whose modeling is considered in the electro-physiology
models, such as the mono-domain and bi-domain equations [76] .
These models study the propagation of the electric stimulus in the
heart, and are thus able to reproduce pathological conditions, such
as arrhythmia and tachycardia (for a review of the many available
models, see [54]). Solution strategies for the coupling of these models
with the mechanics has been studied in [67, 79]. These models are
in general computationally expensive, and so if only the activation
sequence is relevant, cheaper methods based on the Eikonal equation
are available [83], which replace the mono-domain model.
Problem (110) needs to be closed with suitable boundary conditions. The most accepted ones are a Robin condition which accounts
for the friction with the pericardium [182], which can take the form
(P + Pa ) · n + k⊥ f0 ⊗ f0 ys + 0.1k⊥ (I − f0 ⊗ f0 )ys = 0
on ∂Ω,
(111)
where k⊥ = 2 · 105 [150]. We note that there are more advanced models which include the solid velocity, but we do not include it as we use
a quasi-static model. More details in [79]. We denote this condition
with
(P + Pa ) · n = g(ys )
on
∂Ω.
(112)
For ϕi we assume a no-slip condition, which is a Neumann condition
given by
Ki (F ) ∇ pi (F , ϕ) · n = 0
on∂Ω.
This is indeed a no-slip condition. To see this, from (5) we obtain
0 = −ρf Ki (F ) ∇ pi (F , ϕ) = ρf Jφi F −1 (vf − vs ),
which yields vf = vs as det F > 0.
5.2 mathematical model for myocardial poromechanics
5.2.1
Mathematical properties of the model
The mathematical analysis of problem (4) is completely open, so we
focus on the simplified problem (110), which is the coupling of two
well-known problems: The nonlinear quasi-static mechanics (110a)
and the porous media equation (110b), which pose well established
requirements on the form of the Helmholtz potential Ψ. In this section, for simplicity, we ignore the Robin condition and consider a
homogeneous Dirichlet boundary condition on ∂Ω, disregard the active stress, i.e. Pa = 0 and consider a mono-compartment system, i.e
NC = 1. We first observe that problem (110a) comes from a minimization problem, so we can then rewrite the mechanics problem (110a)
as: Given a function ϕ, find a minimizer ys of
Z
min
Ψ(F , ϕ) dx in Ω.
(113)
ys
Ω
As shown in the seminal paper by J. Ball [11], this problem has at
least one minimizer under mild coercivity conditions of the potential
Ψ and the assumption that it is polyconvex, which means there exists
a convex function Gϕ defined in Rd × Rd × R such that
Ψ(F , ϕ) = Gϕ (F , cof F , det F ),
(114)
where cof F = det(F )F −T . On the other side, problem (110b) can be
recast into one the the following type:
∂ϕ
− div (∇ p(F , ϕ) = 0,
∂t
where we assume θ = 0 for simplicity. To see this, we consider an
auxiliary displacement y : Ω → Ωy and subsets ωX ⊂ Ω, ωy ⊂ Ωy .
Then we transport the mass conservation law to Ωy , for which we use
Nanson’s formula ny day = Jy Fy−T N dA [96] where Fy = ∇X y, Jy =
det Fy :
Z
Z
divX Kf ∇X p dX =
Kf ∇X p · N dA
ωX
∂ωX
Z
T
=
Kf FyT ∇y p · J−1
y Fy ny day
∂ωy
Z
=
ωy
−1
−T T
divy J J−1
F
F
k
F
F
∇
p
dy.
y
y
f
y
y
The tensor kf is symmetric positive-definite, so we consider its (unique)
Cholesky factorization [180] kf = ΣΣ T and note that we can write
−1
J J−1
kf F −T FyT
y Fy F
=
q
J/Jy Fy F −1 Σ
q
T
J/Jy Fy F −1 Σ .
127
128
numerical solvers for cardiac perfusion
We thus propose y such that Fy = cΣ −1 F , where c is a constant. To
determine c, we impose J = Jy :
cd J
J = cd J det Σ −1 =
,
det Σ
which implies c = (det Σ)1/d = (det kf )1/2d . Then, problem (110b)
can be rewritten as
1 ∂ϕ
− divy ∇y p = 0
J ∂t
in
Ωy ,
where the map y = cΣ−1 x is an orientation-preserving diffeomorphism, and so it preserves convexity [59]. It can be shown [184] that
if for each F the function ϕ → p(F , ϕ) is monotonic increasing, then
there exists a unique solution to problem (114) (albeit for a fixed domain). This is indeed the case whenever the function ϕ → Ψ(F , ϕ) is
convex.
Putting everything together, it follows that existence of solutions to
problem (110) can be expected under at least the following conditions:
(hm)
The function F → Ψ(F , ϕ) is polyconvex for all ϕ.
(hp)
The function ϕ → Ψ(F , ϕ) is convex for all F .
Remark. We ignore the additional growth conditions for F → Ψ(F , ϕ)
as they yield no fundamental modeling implications. In any case, any rigurous mathematical analysis performed to the coupled problem should consider them.
5.2.2
Constitutive modeling
As shown in Section 2.4, the Piola stress tensor P and the compartment pressures pi for i ∈ {1, ..., NC } are given by derivatives of a
Helmholtz potential Ψ:
∂Ψ
(F , ϕ),
∂F
∂Ψ
pi (F , ϕ) =
(F , ϕ).
∂ϕi
P (F , ϕ) =
(115)
In cardiac modeling, the main approaches for constitutive modeling
in nonlinear poromechanics developed so far have been the following:
additive splitting with fluid porosity [60]. The idea of
this approach is to decompose the energy into a skeleton part and a
fluid part. This is achieved by considering one potential for the solid
phase ψskel and one for each compartment ψi as
ΨA (F , ϕ) = ψskel (F ) +
NC
X
i=1
ψi (ϕi ).
(116)
5.2 mathematical model for myocardial poromechanics
This naturally decouples the physics, which can be seen from (115):
∂ψskel
(F ),
∂F
∂ψi
pi (F , ϕ) =
(ϕi ).
∂ϕi
P (F , ϕ) =
(117)
Of course, the main feature of poromechanics is the interaction between the fluid and solid phases, and so the authors circumvent the
lack of it through the use of a Lagrange multiplier with respect to the
constraint
NC
NC
X
X
J = 1+
mi /ρf = 1 +
(ϕi − ϕi,0 ).
i=1
i=1
The modified energy then reads
ΨA (F , ϕ) = ψskel (F ) +
NC
X
ψi (ϕi ) − λ(J − 1 −
i=1
NC
X
(ϕi − ϕi,0 )),
i=1
which finally yields
∂ψskel
(F ) − λJF −T ,
∂F
∂ψi
pi (F , ϕ) =
(ϕi ) + λ.
∂ϕi
P (F , ϕ) =
This indeed allows for the recovery of the interaction between physics,
but adds two difficulties: On one side, a constrained problem results
in a saddle point problem, which are in general more difficult to approximate numerically, and on the other side we have no control of
λ from the modeling point of view, so there is no way to precisely
model the material pressure response due to deformation. In general,
the functions ψi are such that limϕi →{0,∞} ψi (ϕi ) = ∞ which correctly captures the fact that φi > 0 for all i ∈ {1, ..., NC }, but there is
P C
no guarantee that N
j=1 φj < 1.
additive splitting with solid porosity [56]. This approach,
based on [47], considers a decomposition of the energy into a skeleton part and a solid porosity part, which is the complement of the
solid phase. It is written as
ΨB (F , ϕ) = ψskel (F ) + ψs (Js )
(118)
in a mono-compartment setting, where we recall that Js = J − ϕ =
J(1 − φ) denotes the solid volume fraction. Its extension to the multicompartment case then reads again
ΨB (F , ϕ) = ψskel (F ) + ψs (Js ),
129
130
numerical solvers for cardiac perfusion
P
P C
where Js = J − j ϕj = J 1 − N
j=1 φj . This formulation captures
the feedback of the skeleton to the fluid and vice-versa:
∂ψskel
∂ψs (Js ) −T
(F ) +
JF ,
∂F
∂Js
∂ψs
pi (F , ϕ) = −
(Js ),
∂Js
P (F , ϕ) =
(119)
but also presents two drawbacks. The first one is that the pressure
expression is the same for each compartment, and the second one
is that the resulting problem is degenerate parabolic, with no control
over the single compartment. To see the last point, consider only mass
conservation (114) on each compartment, no compliance with K = I,
no compartment interaction, i.e. βik = 0, and no source term θi = 0,
thus we can recast the mass conservation in the i-th compartment as
∂ϕi
∂p
+ div
∇ Js = 0,
∂t
∂Js
where we used ∇ p =
∂p
∂Js
∇ Js . We expand ∇ Js :
Nc
Nc
X
X
∇ Js = ∇ J −
ϕj = ∇ J −
∇ ϕj ,
j=1
j=1
and rewrite the problem as
2
NC
2ψ X
∂
ψ
∂
∂ϕi
s
s
(∇ ϕj ) = − div
∇J .
− div 2
∂t
∂Js
∂J2s
j=1
If we test each equation with a test function qi in H1 (Ω), we obtain
the following
2
Nc
2
X
∂ϕi
∂ ψs
∂ ψi
, qi +
∇ J, ∇ qi , (120)
∇ ϕj , ∇ qi =
∂t
∂J2s
∂J2s
j
for all ∀qi ∈ H1 (Ω), ∀i ∈ {1, ..., NC }. We focus on the differential
operator, which under the hypothesis of a strictly convex potential
∂2 ψs
> ψ0 > 0 gives control only on the total porosity:
∂J2
s
∂2 ψs
∂J2s
Nc
X
i=1
!
∇ ϕi
,
Nc
X
i=1
!!
∇ ϕi
> ψ0
Nc
X
i=1
2
∇ ϕi
L2 (Ω0 )
for all ϕi ∈ H1 (Ω). We note that this approach, in constrast to the
P
previous one, guarantees j=1 φj < 1 but fails to enforce φi > 0 for
all i ∈ {1, ..., NC }.
In what follows we propose also another strategy, that overcomes
the disadvantages of the previous one and seems to be the most adequate for multi-porosity systems:
5.2 mathematical model for myocardial poromechanics
Figure 19: Representation of pressure interaction between compartments for
the new combined constitutive law.
new additive splitting with fluid and solid porosities.
In light of the previous discussion, we propose a new decomposition
which combines the previous approaches:
Ψ(F , ’) = ψskel (F ) + ψs (Js ) +
NC
X
ψi (ϕi ).
i=1
This gives the relations
∂ψs (Js ) −T
∂ψskel
(F ) +
JF ,
∂F
∂Js
∂ψi
∂ψs
pi (F , ϕ) =
(ϕi ) −
(Js ),
∂ϕi
∂Js
P (F , ϕ) =
(121)
from which we highlight the following aspects:
P
1. The porous part ψs + i ψi acts as a double barrier which
guarantees (strongly) that 0 < φi for all i ∈ {1, ..., NC } and
PNC
j=1 φj < 1.
s (Js )
2. The pressure-like term ∂ψ∂J
JF −T appearing in the Piola stress
s
tensor is driven by the pressure in the solid portion of the tissue
Js only.
3. The pressure which acts on the blood is the difference between
the one in the compartment (lumen) and the one in the tissue
(intramyocardial) as shown in Figure 19. It is known as transmural pressure and is correctly captured from the proposed potential:
pi (F , ϕ) =
∂ψi
(ϕi )
∂ϕi
| {z }
luminar pressure
−
∂ψs
(Js )
∂Js
| {z }
.
intramyocardial pressure
This law can still guarantee existence of solutions for each separate
physics. Indeed, to satisfy hypotheses (HM) and (HP) we require the
following:
131
132
numerical solvers for cardiac perfusion
Arteries
Capillaries
c1
1.333
22
c2
550
1009
c3
45
10
Table 26: Parameters used for the proposed multi-compartment constitutive
law.
• The function ψS (F ) := ψskel (F , ϕ) + ψs (Js ) is polyconvex for all
ϕ.
• The functions ψM (ϕi ) := ψs (Js ) + ψi (ϕi ) are convex for all
J > 0, i ∈ {1, ..., NC }.
We note that these hypotheses are not too stringent on the model.
In fact, the polyconvexity of ψS is immediate as long as ψs is convex
(which holds in practice), and instead the convexity of ψM follows
whenever both functions ψi , ψs are convex. Although less general,
these conditions are easier to verify in practice.
5.2.3
Constitutive model for cardiac perfusion
Functional relations between pressure and intramural vessel volume
have already been proposed in [44] which were obtained by fitting
(real) data. In the work cited, such laws were proposed for a threecompartment 0D model of the myocardium composed of arteries, capillaries and veins, which makes it a perfect candidate for our multicompartment framework. Such models, although devised to represent the transmural pressure, present no dependence on the solid
volume fraction. For this we consider them instead as the fluid compartment energies ψi , and require only the additional modeling of
the solid fraction term ψs . This results in the following relationships:
ψi (ϕi ) = ci,1 exp(ci,3 ϕi ) + ci,2 log(ci,3 ϕi ).
(122)
Values used are presented in Table 26.
Finally, we incorporate into the poromechanics model the prestress
configuration [79, 98]. Its computation is motivated by the fact that
blood pressure in the ventricle chamber is not in equilibrium with
the myocardium, and thus such configuration is computed to obtain a
reference configuration, which is different to the initial configuration,
with an initial displacement which is in equilibrium. We consider
such initial displacement given in end-diastolic configuration as in
[79]. Leaving aside the blood flow induced by the enlargment of the
myocardium during diastole, we expect the prestress configuration to
be in equilibrium, i.e. to induce no flow per se. To this end, we rescale
5.2 mathematical model for myocardial poromechanics
133
the potential, where setting the initial variables as ys 0 , ϕ0 we impose
that, for reference pressures pref, i , the following holds:
pi (F0 , ϕ0 ) = pref, i ,
which results in a rescaled pressure p̃i :
p̃i (F , ϕ) = pi (F , ϕ) − pi (F0 , ϕ0 ) + pref, i .
numerical test 1: the squeeze. In this test we illustrate the
capability of the model to induce flow only through deformation. For
this, consider the same setting as in [49], which we detail in what
follows: Consider the domain Ω = (0, L)2 , L = 10−2 , only one compartment NC = 1 and the potentials
p
p
−1/2
3
ψskel (F ) = 2 · 103 (I1 I3
− 2) + 33 (I2 I−1
−
2)
+
2
·
10
(
I
−
1
−
log
I3 ),
3
3
ψi (ϕi ) = 0
∀i ∈ {1, ..., NC },
3
ψs (Js ) = 2 · 10 (Js /φs,0 − 1 − log(Js /φs,0 )),
where I1 , I2 and I3 are the invariants of the Green strain tensor C =
F T F , and boundary conditions are
p(F , m) = 0
on ∂Ωleft ,
on ∂Ω \ ∂Ωleft ,
∇p·n = 0
ys = 0
( L sin(2πt), 0)
8
ys =
0
on ∂Ωleft ,
t61
on ∂Ωright ,
t>1
with all the missing boundary conditions on the solid understood
as homogeneous Neumann conditions. This test presents a geometry
with an imposed deformation so that it induces mass flow through
the left boundary, as reported in Figure 20, where we see that during the stretching, mass enters the domain (positive average mass),
instead during compression mass exits (negative average mass). After t = 1, mass goes back to zero as expected. We note that imposing
pressure conditions in this formulation is not trivial. To implement a
general pressure boundary condition on a subset Γp ⊂ ∂Ω, we require
inverting the condition
p(F , mi ) = pD
on
Γp .
The resulting boundary condition is given by
m(F , pi ) = m(pD )
on
Γp ,
where the function m is understood as the inversion of the function
p with respect to m, which depends on the pressure pi . We consider
a fixed point iteration as in Appendix B such that the limit solution
134
numerical solvers for cardiac perfusion
Figure 20: Test 1: Evolution of average added mass.
satisfies the desired boundary condition. At each time step, given an
initial point m0i , the k-th iteration is given by the solution mk
i that
satisfies the boundary condition
mi (F k−1 , pi (F k−1 , mk−1
)) = m(pD ).
i
This sequence can present slow convergence, so we used Anderson
acceleration as in Section 4.5.1 to obtain a more efficient scheme.
Numerical test 2: Role of quasi-incompressibilities. We now study
how the different energies which depend on the solid–i.e. the quasiincompressibility term from ψskel and ψs –behave with respect to the
observed quasi-incompressibility. For this we consider the same geometry and potentials from Test 1, together with the following boundary conditions:
p(F , m) = 10(1 − exp(−t2 /0.25)) on ∂Ωleft ,
∇p·n = 0
on ∂ΩM \ ∂ΩM,left ,
ys x = 0
on ∂ΩM,left ,
ys y = 0
on ∂ΩM,bottom ,
with all other missing boundary conditions on the solid understood
as homogeneous Neumann conditions. The results of the swelling
tests are reported in Figures 21 and 22. Note that the dominant term
regarding quasi-incompressibility is ψskel , i.e. the solid potential. In
fact, as seen in Figure 21, the deformed area of the middle and high
values of κp shows an increase of a 11% and 10% respectively, and
the low value of κp = 102 does not reach balance during the simulation. Also note that instead ψs can be interpreted as yielding the
energy required to increase the pressure. Indeed, even though all simulations have the same inflow pressure, the transient simulations of
κp = 102 show how this produces a much lower pressure when ψs is
the highest, meaning the case κs = 105 .
5.2.4
Numerical solvers comparison
Problem (110) is very challenging from a computational point of view.
Not only does it consider the already involved nonlinear mechanics
5.2 mathematical model for myocardial poromechanics
(a) κp = 102 .
(b) κp = 103 .
(c) κp = 105 .
Figure 21: Test 2: Evolution of the area in the nonlinear swelling test for κs
in {102 , 103 , 105 }.
135
136
numerical solvers for cardiac perfusion
(a) κp = 102 .
(b) κp = 103 .
(c) κp = 105 .
Figure 22: Test 2: Evolution of the area in the nonlinear swelling test for κs
in {102 , 103 , 105 }.
5.2 mathematical model for myocardial poromechanics
137
equations, but these are also coupled with a nonlinear parabolic problem. To shed light on the numerical strategy to use when solving
this problem, in this section we compare monolithic and fixed point
schemes. Note that the iterative methods developed in Chapter 3 are
not applicable for problem (110b), as they mainly rely on the saddle point structure of the problem. One possible perspective would
be that of proposing quasi-Newton schemes as in the nonlinear tests
from Section 4.6. Still, the fixed-point approach can be interpreted as a
splitting scheme using the discretized then split then linearize approach
described in Chapter 3.
We note that the specific form of the nonlinearity present in (110b)
naturally yields a semi-implicit time discretization, which we consider as well. Consider a time step ∆t where ηn ≈ η(tn ) for any
quantity of interest η. With these definitions, the time discrete strong
problem reads: Find ys n+1 and ϕn+1 defined in Ω such that
− div(P (F n+1 , ϕn+1 ) + Pa (F n+1 )) = f
in
Ω,
(123a)
ϕn+1
i
− ϕn
i
∆t
− div Ki (F n+1 ) ∇ pi (F n+1 , ϕn+1 )
(123b)
+
NC
X
βij (pi (F n+1 , ϕn+1 ) − pj (F n+1 , ϕn+1 )) = Jn+1 θi
j=1
(123c)
for all i ∈ {1, ..., NC }. We refer to problem (123) as the implicit formulation. As proposed in Section 5.2.3, the pressure is actually writen
pi = pi (J, ϕi ) so that its gradient can be further decomposed as
∇ pi (J, ϕi ) =
∂pi
∂pi
∇J+
∇ ϕi .
∂J
∂ϕi
We formulate the semi-implicit time discretization with the following
approximations:
• ∇ pi (Jn+1 , ϕn+1 ) ≈
∂pi n+1
n+1 + ∂pi (Jn+1 , ϕn ) ∇ ϕn+1 .
, ϕn
i )∇J
i
i
∂J (J
∂ϕi
• pi (Jn+1 , ϕn+1
) ≈ pi (Jn+1 , ϕn
i ).
i
The resulting semi-implicit formulation reads: Find ys n+1 and ϕn+1
defined in Ω such that
− div(P (F n+1 , ϕn+1 ) + Pa (F n+1 )) = f,
(124a)
in Ω,
138
numerical solvers for cardiac perfusion
C
X
ϕn+1
− ϕn
i
i
βij (pi (F n+1 , ϕn ) − pj (F n+1 , ϕn ))
+
∆t
j=1
∂pi n+1 n
n+1
n+1
− div
(J
, ϕ )Ki (F
) ∇ ϕi
∂ϕi
∂pi n+1 n
n+1
n+1
n+1
=J
θi + div
(J
, ϕ )Ki (F
)∇J
∂J
N
∀i ∈ {1, ..., NC }.
(124b)
Remark. Although less clear from in the implicit scheme, both formulations
require computing the quantity ∇ J. As we envision an implementation by
means of the finite elements method, ys will be approximated by a piecewise
linear (or quadratic) function ys,h which is globally continuous. This would
yield a discontinuous discrete determinant Jh = det F (ys,h ). Throughout
this section we approximate ∇ J with ∇(det F (ys,h )) in each element, which
discards the boundary measures appearing from the gradient of the discontinuous and element-wise linear function det F (ys,h ). Another approach,
which we use in Section 5.3, is to decouple both physics, which enables the
use of the P1 projection of J. More precisely, we will use a stabilized projection which grants smoothing to the solution, given by J̃, which solves
Z
Z
2
Jq dx ∀q ∈ H1 (Ω).
J̃q + h ∇ J̃ · ∇ q dx =
Ω
Ω
We now write the weak form of both implicit and semi-implicit formulations. For this, we denote with p† the pressure, from which it
will be understood that p† = p(Jn+1 , ϕn
i + 1) in the implicit formulation, p† = p(Jn+1 , ϕn
)
in
the
semi-implicit
and the same difference
i
†
will be made in ∇ p with a small abuse of notation. Consider Robin
boundary conditions (111) for the displacement and homogeneous
Neumann boundary conditions for the porosities, so that the weak
form reads: Find ys n+1 ∈ H1 (Ω) and ϕ ∈ [H1 (Ω)]NC such that
FS (ys n+1 , ϕn+1 ; ys ∗ ) :=
Z
Z
n+1
n+1
n+1
∗
(P (F
,ϕ
) + Pa (F
)) : ∇ ys dx −
Ω
g(ys n+1 ) · ys ∗ dS
∂Ω
(125)
= 0,
∗
, ys n+1 , ϕn
FiM (ϕn+1
i ; ϕi )
i
Z
:=
C
X
ϕn+1
− ϕn
i
i
ϕ∗i + Ki (F n+1 ) ∇ p†i · ∇ ϕ∗i +
Jn+1 βij (p†i − p†j )ϕ∗i dx
∆t
N
Ω
j=1
(126)
Z
=
Ω
Jn+1 θi ϕ∗i dx,
for all test functions ys ∗ ∈ H1 (Ω), ϕ∗i ∈ H1 (Ω) and i ∈ {1, ..., NC }.
Each formulation can be solved either with a Newton method or
through fixed point iterations, which are detailed in Appendix B. In
5.2 mathematical model for myocardial poromechanics
139
particular, the fixed point iterations in this context will be given by:
Consider an initial guess (ys n+1,0 , ϕn+1,0 ), then iterate the following
until a convergence criterion is satisfied:
1. Find ys n+1,k+1 such that FS (ys n+1,k+1 , ϕn+1,k ; ys ∗ ) = 0 for all
ys ∗ .
∗
2. Find ϕn+1,k+1
such that FM (ϕn+1,k+1
, ys n+1,k+1 , ϕn
i ; ϕi ) = 0
i
i
for all ϕ∗i and i ∈ {1, ..., NC }.
5.2.4.1 Numerical test: Convergence
In this section we numerically verify the convergence of the monolithic and fixed point schemes, with and without a semi-implicit treatment. For this, we consider a square
of side-length 10−2
h geometry
i
with parameters NC = 3, β = 10−3
and the potentials given by
−1/3
ψskel = 2 · 103 (I1 I3
011
101
110
, ρf = ρs = 1060, kf = 10−7
−2/3
− 3) + 2 · 104 (I2 I3
− 3) + 2 · 104 (J − 1 − log(J)),
ψi (ϕi ) = 0,
Js
ψs (Js ) = κs Js − Js,0 − log
,
Js,0
where I1 = tr C, I2 = 1/2 (tr C)2 − tr(C 2 ) , I3 = det C are the invariants of C = F T F and κs = 2 · 102 . The Dirichlet boundary conditions
are given by
ys = 0
on ∂Ωleft ∪ ∂Ωbottom ,
m=0
on ∂Ω,
and the exact solutions are
"
#
0.5 t2 sin(2πx1 ) sin(2πx2 )
ys (x, t) =
,
−0.5 t2 sin(2πx1 ) sin(2πx2 )
20 sin(2πx1 ) sin(2πx2 )
m(x, t) = 100 t2 (x1 − L)(x2 − L)
sin(2πx1 ) sin(2πx2 ) ,
sin(x1 ) sin(x2 )
from which we compute the remaining Neumann boundary conditions for the displacement. We use first order continuous elements
for the added mass and second order for the displacement, where the
later is used to avoid ∇Jh = 0. We performed the space and time convergence analysis separately for: (i) Monolithic/fixed point methods
and (ii) implicit/semi-implicit mass conservation, and show them in
Appendix C. We note that convergence rates in space are as expected,
being of second order for the H1 norm of the displacement and of first
order for the H1 of the added-mass. Note also that apparently optimal L2 estimates could be obtained for the added-mass, but this does
140
numerical solvers for cardiac perfusion
(a) Semi-implicit, ∆t = 10−3 .
(b) Implicit, ∆t = 10−3 .
(c) Semi-implicit, ∆t = 10−4 .
(d) Implicit, ∆t = 10−4 .
Figure 23: Wall time for 0.001 s of simulation with κs = 102 .
not hold for the displacement. Also, time convergence was not always
attainable even when using roughly 104 elements, which means that
the spatial error dominates these phenomena.
5.2.4.2
Numerical test: Wall time comparison
We consider the same setting
as in the convergence test but with
−6
2
4
0
1
NC = 2, β = 5 10
1 0 and test κs ∈ {10 , 10 } to have better
agreement with physiological parameters. We show the results for
κs = 102 and κs = 104 in Figures 23 and 24 respectively. We note that
for a sufficiently small time step or for low bulk modulus, the fixed
point iteration presents superior performance. Instead, the monolithic
performs better with higher bulk modulus with a larger time-step.
5.3
coupled perfusion problem
In this section we present the coupling between the epicardial coronary vessels and the myocardium. The resulting model is composed
of three parts:
1. Blood flow starts at the aortic root with an inlet pressure given
by pao .
5.3 coupled perfusion problem
(a) Semi-implicit, ∆t = 10−3 .
(b) Implicit, ∆t = 10−3 .
(c) Semi-implicit, ∆t = 10−4 .
(d) Implicit, ∆t = 10−4 .
Figure 24: Wall time for 0.001 s of simulation with κs = 104 .
2. The blood flows through the coronaries into the tissue through a
coupling condition between the coronaries and the tissue given
by pressure continuity.
3. The blood leaves the tissue through the veins, which have a
constant pressure equal to pveins = 1kPa [55].
Cardiac perfusion presents very complex spatial interactions, where
one very important phenomenon is the pressure balance between
each coronary vessels and the region it perfuses. To model this, we
consider for each outlet vessel the region of the myocardium which
is closest to it as in [70], which results in what is referred to as perfusion regions [60, 70], as shown in Figure 25. We use such subdivision
to couple flows locally. For this, we denote with I the set of inlet
segments where we assign the inlet pressure pao , and with O the set
of outlet segments from the coronary vessel network and with Ωo
the perfusion region corresponding to o ∈ O, where it holds that
Ω = ∪o∈O Ωo . Blood flow is connected through each of the aforementioned components as follows:
inlet pressure. All of the inlet segments stem from the aortic
root, which means that the same pressure acts on them:
i
Pp
= pao
∀i ∈ I.
141
142
numerical solvers for cardiac perfusion
(a) Left view.
(b) Right view.
Figure 25: Perfusion regions induced by Zygote coronaries.
effect of myocardium on coronaries. The outputs of the
network have an assigned pressure equal to the average pressure in
the first compartment, i.e.
Z
1
o
Pd =
p1 dx ∀o ∈ O.
(127)
|Ωo | Ωo
effect of coronaries on myocardium. The coronaries act
on the myocardium by means of a source term which equals the surface flow on the output. For this, from we compute the source term
as
θ1
=
Ωo
o
o
αo Qo
1
d + (1 − α )Qp
Qo =
,
|Ωo |
|Ωo |
(128)
for all o ∈ O.
the venous return. The last compartment interacts with the
veins through a sink term which is proportional to the pressure difference with the veins:
θNC = −γ(pNC − pveins ),
where γ = 10−4 [128] and pveins = 1 kPa.
We denote the solution of the coronary vessels as
(Q, P , P )
if using the Bernoulli law (106),
d p
X=
|S|
|S| |S| |S|
1 1 1 1
(Qd , Qp , Pd , Pp , ..., Qd , Qp , Pd , Pp ) if using the lumped 0D model (109),
which allows us to denote generically the epicardial coronary flow
problem as
GẊ + JX = 0.
5.4 the one-way coupling strategy
143
With it, we can write the entire coupled perfusion problem in weak
form as follows: Find ys ∈ L1 (0, T ; H1 (Ω)), ϕi ∈ L1 (0, T ; H1 (Ω)) for
i ∈ {1, ..., NC } and X such that
Z
(P + Pa (F )) : ∇ ys ∗ dx
Ω
Z
−
g(ys ) · ys ∗ dS = 0
Z
Ω
∀ys ∗ ∈ H1 (Ω),
∂Ω
dϕi ∗
ϕ + Ki (F ) ∇ pi · ∇ ϕ∗i
dt i
+
NC
X
Z
βij (pi − pj )ϕ∗i dx
=
j=1
Ω
Jθi ϕ∗i dx
∂Ψ
(F , ϕ),
∂F
∂Ψ
pi =
(F , ϕ),
∂ϕi
GẊ + JX = 0,
∀ϕ∗i ∈ H1 (Ω), i ∈ {1, ..., NC },
P =
i ∈ {1, ..., NC },
i
Pp
= pao ∀i ∈ I,
Z
1
o
p1 dx ∀o ∈ O,
Pd
=
|Ωo | Ωo
(129)
where
o
o
αo Qo
1
d +(1−α )Qp
Qo =
|Ω
|
|Ω
|
o
o
θi = −γ(pN − pveins )
C
0
i = 1, in region o,
i = NC ,
i ∈ {1, NC }c .
In view of coupling this model with systemic circulation, we consider
the aortic pressure as an output of such model, which yields
pao = pao (F ).
Such models are well established in literature, and are based on the
Windkessel model [191]. The entire model can be represented as shown
in Figure 26.
5.4
the one-way coupling strategy
We propose to neglect the influence of the blood on the tissue, which
∂ψskel
can be stated as ∂Ψ
∂F ≈
∂F . This hypothesis decouples the mass
conservation equation (110b) from the mechanics (110a), which we
refer to as the one-way coupling. This approach of course neglects
the important role of blood pressure on the tissue, but it also has
the following advantages: (i) Existing electromechanics models have
144
numerical solvers for cardiac perfusion
Blood pressure/Volume change
Blood perfusion
Electromechanics
Intramyocardial pressure/Compliance
Windkessel
Valve dynamics
Aortic pressure
Vessel resistance
Pressure at aortic root
Blood inflow
Coronary vessels
Figure 26: Diagram of interactions in the fully coupled perfusion model.
been adjusted in literature in order to take into account the volume
variation due to blood flow, (ii) the electromechanics is a computationally expensive problem which can be solved in a pre-computing
stage with this approach and (iii) proposing blood flow for a given
deformation enables the use of this framework in an already existing
electromechanics solver.
In virtue of the previous discussion, we consider throughout this
section the displacement ys which solves the electromechanics problem
− div(P (F ) + Pa (F )) = 0
Ω
with Robin boundary conditions, and which is coupled with a circulation model capable of computing the aortic pressure pao = pao (F ),
shown in Figure 27. Thus, in what follows ys and pao are known
quantites for all t > 0. Indeed, we use the electromechanics model
with systemic circulation proposed in [162], whose output is shown
in Figure 27. The resulting problem can be represented as shown in
Figure 28.
This coupled problem is solved by means of a fixed-point iteration.
As detailed in Appendix B, this means solving first the network for a
given poromechanics solution and then use this solution in the mass
conservation (110b). This procedure in general requires no more than
4 iterations.
5.5
numerical tests
In this section we present two numerical tests where we solve problem (129) with the one-way coupling strategy. In the first test, the coronary vessels are considered by means of the Bernoulli law, whereas
in the second we use a network of lumped 0D models. One of the
main difficulties of poromechanics modeling is setting physiological
5.5 numerical tests
(a) PV-loop.
145
(b) Aortic pressure.
Figure 27: Output of the left ventricle displacement used for the one-way
coupling. (a) PV-loop and (b) aortic pressure. Initial configuration
considered at the end of diastole, depicted with light blue dot in
(a).
Blood perfusion
Electromechanics
Intramyocardial pressure/Compliance
Windkessel
Valve dynamics
Aortic pressure
Vessel resistance
Pressure BC
Blood inflow
Coronary vessels
Figure 28: Diagram of interactions in the one-way coupled perfusion model.
146
numerical solvers for cardiac perfusion
parameters, which are in many cases patient-specific. Because of this,
we detail the reasoning behind each choice.
Network
• From the coronaries geometry we were able to estimate the variables length (`) and area (A), as well as the entire network connectivity.
• Wall thickness H belongs to the range 0.1 − 1 mm [163]. We use
0.5 mm.
• Lamé’s parameters are an approximation, as vessel walls present
nonlinear behavior. Nevertheless, in [21] they estimate Young’s
modulus to be in the range of 70 − 130 kPa, whereas in [106]
they estimated the Poisson ratio to be approximately 0.49. We
then use E = 105 kPa, ν = 0.49, where the increased E is due
to unphysical behavior observed in the network models due to
large C.
• Blood has a density of 1.06 gr/cm3 and a dynamic viscosity of
0.035 Pa · s.
Myocardium
• In [128] they used a static perfusion model with three compartments, where the first two have a permeability with prinmm2
mm2
cipal eigenvalues of 1 kPa·s
and 10 kPa·s
, and the third one
mm2
mm2
mm2
20 kPa·s . We use k1 = 1 kPa s and k2 = 10 kPa
s in our two
compartments setting. Their interaction coefficients were estimated to be β12 = 0.02 (kPa · s)−1 , β23 = 0.05 (kPa · s)−1 , so
we use β12 = 0.05 (kPa · s)−1 in our context. Also, they use
γ = 0.1 (kPa · s)−1 , and so do we.
• For the constitutive parameters shown in Table 26, we set NC =
2 and ψi as in [44].
Remark. The contribution of the nonlinear reaction given by the compartments interaction remains unexplored. In particular, it is possible to justify
instability by an increasingly dominant reaction term in diverging Newton
iterations.
5.5.1
Numerical tests with a Bernoulli 0D coronary flow
In this section we study the passage of blood through the myocardium
with the overly simplistic Bernoulli flow model in a single vessel segment with the aforementioned inlet/outlet areas and the inlet pressure obtained from the electromechanics. This is coupled to the myocardium through equations (127) and (128), presents a pressure re-
5.5 numerical tests
(a)
(b)
Figure 29: Evolution of average (a) pressure and (b) added mass in both
arteries and capillaries in the Bernoulli perfusion test.
sponse given by the potential Ψ described in Section 5.2.3 and satisfies
the boundary conditions detailed in Section 5.2, i.e. Robin conditions
for the displacement and homogeneous Neumann conditions for the
mass conservation. We use the solid potential
ψs (Js ) = J−20
,
s
where the value 20 was manually calibrated. We report the evolution of pressure and added mass in Figure 29, where we report the
third heartbeat, which presented a stationary dynamic. Looking at
the pressures, we note the natural ordering of pressures, where it
holds that pao > parteries > pcapillaries > pveins = 1 kPa. Also, there is an
increase in the pressure during systole as expected. The pressure increase drives blood flow, which can be appreciated by looking at the
added mass. The mass in the arteries is constant throughout the simulation, which is consistent with the low compliance of these vessels
when compared to the capillaries (c3,arteries > c3,capillaries ). This yields
that the variation of volume during contraction is given entirely by
the deformation of the capillaries. Then, we show the spatial distribution of the added mass in the first compartment in Figure 30, in
the second compartment in Figure 31 and the total added mass in
Figure 32. The variation of blood is more accentuated in the endocardium, which is consistent with it being the structure which incurs
in the largest volumetric deformation variation. This can be appreciated also in the arteries (first compartment), even though its average
added mass presents little variation over time.
5.5.2
Numerical tests with lumped coronary network
In this section we replicate the simulations from previous section but
we consider instead a reduced model for the coronary network given
147
148
numerical solvers for cardiac perfusion
(a) t = 0.
(b) t = 0.2.
(c) t = 0.5.
Figure 30: Added mass evolution during third heartbeat in the first compartment (arteries) of Bernoulli coronaries test.
(a) t = 0.
(b) t = 0.2.
(c) t = 0.5.
Figure 31: Added mass evolution during third heartbeat in the second compartment (capillaries) of Bernoulli coronaries test.
(a) t = 0.
(b) t = 0.2.
(c) t = 0.5.
Figure 32: Total added mass evolution during third heartbeat of Bernoulli
coronaries test.
5.5 numerical tests
149
by the Zygote coronaries and its induced perfusion regions as in Figure 25 and the solid potential
ψs (Js ) = 5 · 104 (Js − 1 − log Js ),
where the parameter 5 · 104 was chosen to match the quasi-incompressibility
of the mechanics, in accordance to the quasi-incompressibilities test
from Section 5.2.3. We prefer this law to the one used in the Bernoulli
test as it has used in literature before [49, 56], so we test it in this
more realistic scenario.
We represent the coronaries as networks as shown in Figures 33
and 34. These specific geometry presents a small number of vessels
with unrealistic areas, which initially yields unbalanced perfusion, i.e.
small regions receive all the blood. To alleviate this, we have modified
the area of each segment so as to obtain a more homogeneous inflow.
More specifically, we used two methods:
1. An amplifying factor ξ in all areas, so that the new areas are
given by Ãs = ξAs for all segments s. We have found ξ = 2 to
give good results.
2. Ran simulations without deformation, then halved the area of
all hiperperfused terminal vessels and doubled the area of all
hipoperfused vessels until there were no noticeable imperfections in the blood inflow. Whenever doubling/halving proved
too coarse, we used x0.75 and x1.5.
The initial and final areas are displayed in Table 27. Also, the spatial heterogeneity of source terms given by the perfusion regions generates numerical instabilities due to the reaction term coming from
the compartments interaction, for which we enlarged the permeability tensors to 10−7 . We show the evolution of the average pressure
and the total mass in Figure 35, where the main differences with the
previous case are spatial homogeneity of the capillaries and the heterogeneity of the arteries. We show the spatial distribution of added
mass in Figures 36, 37 and 38. The flows induced in the right and
left arteries are shown in Figure 39, where the left coronary vessel presents a much higher blood flow than the one on the right,
which is anatomically correct. The values instead are slightly high,
as the average blood flow through the coronaries is roughly 3.3cm3 /s
[160], as opposed to the ≈ 7cm3 /s we obtained. Despite this fact, the
model correctly captures the decrease of blood flow during systole
and the myocardial blood filling during diastole. We note that this
test presents a much more realistic spatial configuration, obtained in
virtue of the interaction of the coronary vessels with the tissue.
150
numerical solvers for cardiac perfusion
Original (10−6 m)
Modified (10−6 m)
2
0.77
0.77
3
0.52
1.32
4
1.23
1.23
6
0.86
0.86
7
1.43
0.215
8
1.79
1.79
9
2.25
4.506
10
1.49
2.96
16
0.92
1.844
17
0.94
2.988
19
0.52
0.52
20
0.5
0.75
21
0.5
0.5
22
1.02
1.02
23
6.49
6.49
24
3.79
3.79
25
3.74
3.74
26
3.58
3.58
28
4.09
4.09
29
2.34
2.34
30
1.95
1.95
32
2.59
1.3
33
1.74
1.045
34
1.57
1.5
Table 27: Modified vessel areas for Zygote coronaries.
5.6 conclusions
26i
6
151
17o
7
8
16o
32
27
19o
22
33
20
21
21o
34
25
23
20o
24
22o
26
(a) Zygote geometry.
(b) Reduced model and tags.
Figure 33: Left coronary tree model reduction. Inlet and outlet segments denoted with ’i’ and ’o’ respectively.
5.6
conclusions
In this chapter we presented a framework for modeling cardiac perfusion with a reduced model for the coronary vessels. We first extended the classical lumped vessel model, where the new formulation allows for arbitrary boundary conditions and network topologies. This model is sensitive to initial data, so we presented a procedure to obtain a stationary configuration with Aitken acceleration,
which dramatically reduces the time required to converge. For the
myocardium, we presented a novel thermodynamic potential which
allows to decompose the internal pressure as the difference between
the fluid and solid pressures. This model can be naturally extended
to a multi-compartment formulation, for which we have presented
convexity conditions which guarantee the well-posedness of the mechanics and mass conservation problems independently. We also presented a comparison between monolithic and iterative solvers for the
poromechanics problem, together with a novel semi-implicit formulation which takes advantage of the nonlinear diffusion term. We note
that the iterative solvers developed in Chapter 3 are not adapted to
the nonlinear model solved in this chapter, as it does not present a
saddle point structure. This happens because the Darcy law used for
the fluid does not consider viscous dissipation, which greatly simplifies the problem. Finally, we present two simulations on a realis-
152
numerical solvers for cardiac perfusion
(a) Zygote geometry.
23i
24
3
2
1
27
10o
10
25
5
9o
4
11
8o
28
30
9
7o
16
2o
17
12
29
18
3o
4o
13
14
28
6o
15
(b) Reduced model and tags.
Figure 34: Right coronary tree model reduction. Inlet and outlet segments
denoted with ’i’ and ’o’ respectively.
(a)
(b)
Figure 35: Evolution of average (a) pressure and (b) added mass in both
arteries and capillaries in the network perfusion test.
5.6 conclusions
(a) t = 0.
(b) t = 0.2.
(c) t = 0.5.
Figure 36: Added mass evolution during third heartbeat in the first compartment (arteries) of network coronaries test.
(a) t = 0.
(b) t = 0.2.
(c) t = 0.5.
Figure 37: Added mass evolution during third heartbeat in the second compartment (capillaries) of network coronaries test.
(a) t = 0.
(b) t = 0.2.
(c) t = 0.5.
Figure 38: Total added mass evolution during third heartbeat of network
coronaries test.
153
154
numerical solvers for cardiac perfusion
Figure 39: Blood flow in the right and left coronary arteries during a heartbeat.
tic geometry, where we show the advantage of considering the spatial information regarding the position of the coronary vessel outlets.
The model is able to reproduce physiological conditions and thus,
combined with the use of electromechanics as a pre-computing stage,
presents a powerful tool for the efficient creation of in-silico models.
6
CONCLUSIONS
In this thesis we presented a computational framework for the development of in-silico models of cardiac perfusion, embedded in the circulatory system. This involves the development of mathematical models for the coronary vessels (both epicardial and intramural) and the
myocardium, where the coupling with the circulatory system is done
through the aortic pressure and the venous return pressure (i.e. in
the coronaric sinus). Together, these aspects yield a perfusion model
which is coupled to the systemic circulation. As quasi-incompressible
models of the heart already account for the volume variations due to
blood flow, we propose considering perfusion with a given deformation, computed from an electromechanics model. This approach drastically reduces the computational time, and we have indeed shown
that this approach yields physiologically accurate results. We simulate flow in the epicardial vessels through a network of lumped
Navier-Stokes models, where we added to the existing models the
flexibility to handle any desired combination of boundary conditions,
and thus obtained a lumped model which can handle arbitrary interface conditions in the network, meaning both boundary conditions
(inflow/outflow) and the network connectivity. In addition, we have
shown that this strategy presents little to no variation in the model
solutions, but instead it can potentially improve the conditioning of
the resulting linear problem.
The intramural coronary vessels and myocardium are considered
in a poromechanics framework, which substantially reduces the complexity of the physics under consideration. The numerical aspects of
the resulting model has not received much attention, and so we have
discussed and tested most of the points which involve its numerical
approximation. Our point of departure for this is, based on our experience in cardiac modeling, the overall superiority of a monolithic
approach. An obvious first step in this regard is the analysis of the
tangent problem, which we presented in Chapter 2. The model studied is formally of elliptic character, but numerical evidence shows
otherwise. This is mainly due to the small ellipticity constant of the
pressure block, which yields a saddle-point problem in practice. We
thoroughly studied this structure, where the related constraint appears as the divergence of the sum of the displacement and the fluid
velocity, weighted by the porosity, and proved that the Taylor-Hood
family of finite elements is adequate in this context, with both fluid velocity and displacement being approximated with elements of higher
order than those used for the pressure. Still, satisfactory results are
155
156
conclusions
obtained in practice by using elements of higher order only for the
fluid.
The linearized poromechanics model presents great resemblance
to Biot’s consolidation model in soil mechanics. In that model, the
most consolidated solution strategy is given by iterative splitting techniques, which are built upon the saddle point structure of the problem and present improved overall complexity. Based on this, we have
successfully transferred the knowledge from Biot’s equations to our
linearized model in Chapter 3, specifically for the undrained and
fixed-stress splitting schemes. Both are two-way splitting strategies,
where the mechanics are decoupled from the problem, and which require additional stabilization parameters to guarantee unconditional
convergence. Such schemes can also be used as preconditioners, so
we provide an additonal three-way splitting scheme based on the
fixed-stress. Such ecosystem of iterative solvers is not a drawback
but a feature, as each method behaves differently in specific applications. In our study, we have seen that the fixed-stress is very robust
with respect to quasi-incompressibility, whereas the undrained performs better for compressible materials and is slightly more robust in
a low permeability regime. These methods can be further improved
with Anderson acceleration, which we have shown to contribute with
significant robustness. Finally, we conclude with preliminary results
for nonlinear elastic law, where the proposed schemes can be used
as quasi-Newton solvers. Interestingly, the three-way split performs
similarly to the two-way fixed stress (undrained does not work as biologic materials are better described through quasi-incompressibility),
which has a much more significant impact in a high-performance environment, as the three discrete problems being solved are elliptic.
These strategies are not suitable for the nonlinear poromechanics
model considered in Chapter 4. This happens because this model uses
a simple Darcy law for the fluid velocity, which allows for it to be reduced and results in two positive problems (the mechanics, coming
from a polyconvex energy, and the porous media equation, which is
in general degenerate-parabolic), instead of the original three problems with a saddle-point structure. In this context, we studied monolithic and fixed-point strategies, and showed that performance depends on the time-step used: Monolithic performs better with larger
time-steps, fixed-point with smaller. One future study of interest in
this regard is the use of quasi-Newton algorithms, which in this scenario would translate into neglecting one of the off-diagonal blocks.
Although we have successfully addressed the numerical approximation of nonlinear poromechanics, mathematical modeling for cardiac perfusion is still a largely open area of research. We divide such
problems in three areas: Analysis, models and applications. Regarding the analysis, this problem is heavily understudied. Firstly, it has
been shown that the correct framework for the analysis of these mod-
conclusions
els is that of generalized gradient flows [39], but minimization procedures are not very common in finite elasticity, due to the lack of
a-priori estimates and also due to the Lavrentiev phenomenon [75].
Because of this, the Euler-Lagrange equations require deeper analysis, which has not yet been developed. Still, we were able to provide guidelines for devising constitutive laws for both mechanics and
porous media, but the argument is far from being closed.
Secondly, poromechanics models are still not mature. This can be
seen in particular by the various different approaches which we have
mentioned throughout our work, and in particular we stress that constitutive modeling in poromechanics has not yet achieved a state in
which it is useful in a patient agnostic manner, and perhaps this goal
is not even possible to achieve in this context. Models for coronary
vessels are being studied, but still there has been no groundbreaking landmark which enables a more fluent translation of models into
clinical applications. Lastly, clinical applications of perfusion models
still present some major challenges, where probably the most relevant
one is the accurate segmentation of in-vivo coronary vessels, to which
perfusion models show a very high sensitivity. Another challenge for
clinical translation is the applicability of blood in the tissue, which
can be directly used in metabolic models. Such models present entirely different time scales to the ones involved in cardiac modeling,
for instance the most perfused areas of the myocardium can develop
ischemia in as little as 3 minutes [90], but even this scenario would
require the simulation of hundreds of heartbeats.
157
APPENDIX
159
A
SADDLE POINT PROBLEMS
In this appendix we present some well-known results regarding saddle point problems which we use throughout the analysis. The first
one is a discrete invertibility result, for reference see [19].
Theorem 13. Let A, B, C be matrices such that A is positive definite, C is
positive semidefinite and ker C ∩ ker B T = {0}. Then, the matrix M defined
as
"
#
A BT
M=
B −C
is invertible.
The next one is a generalization of the Ladyzhenskaya-BabuškaBrezzi condition, which we adapt from [22].
Theorem 14. Consider bilinear continuous forms A : V × V → R, B1 :
V × Q → R and B2 : V × Q → R for Hilbert spaces V, Q. Under the
following hypotheses:
sup
v∈V
sup
v∈V
A(v, v∗ )
> αkv∗ kV
kvkV
B1 (v, q)
> β1 kqkQ
kvkV
∀v ∈ V,
sup A(v, v∗ ) > 0 ∀v∗ ∈ V,
v∈V
∀q ∈ Q,
sup
v∈V
B2 (v, q)
> β2 kqkQ
kvkV
∀q ∈ Q,
the following problem has a unique solution: Find (u, p) in V × Q such that
A(u, v) + B1 (v, p) = F(v) ∀v ∈ V,
(130)
B2 (u, q) = G(q) ∀q ∈ Q.
Assuming that (uh , ph ) is the solution to a conforming Galerkin scheme
in spaces Vh × Qh , then the following convergence estimate holds for constants C1 , C2 , C3 , C4 depending on the ellipticity constant of A, the inf-sup
constants of B1 , B2 and the continuity constants of all bilinear forms:
ku − uh kV 6 C1 inf ku − vh kV + C2 inf kp − qh kQ ,
vh ∈Vh
qh ∈Qh
kp − ph kQ 6 C3 inf ku − vh kV + C4 inf kp − qh kQ .
vh ∈Vh
qh ∈Qh
161
B
NUMERICAL METHODS FOR NONLINEAR
PROBLEMS
We consider the numerical solution of the nonlinear system of equations
f(x, y) = 0,
(131)
g(x, y) = 0,
and with each we shall show the different possible approaches for numerically approximating its solution. This problem incorporates two
important difficulties: It is a coupled problem, and it is nonlinear. A
monolithic approach refers to solving (131) as one big system, which
means looking at it as
(132)
F(x, y) = 0,
where F(x, y) = (f(x, y), g(x, y)). Instead, an iterative procedure can
be adopted, in which we solve the following partial problems until a
certain convergence criterion is satisfied:
1. Given xk , find yk+1 that satisfies
f(xk , yk+1 ) = 0.
2. Given yk+1 , find xk+1 that satisfies
g(xk+1 , yk+1 ) = 0.
Iterative schemes such as the latter are referred to as fixed-point iteration. To see this, we assume that such problems are uniquely solvable,
such that the solution operators
yk+1 = F(xk )
xk+1 = G(yk+1 )
are well-defined. If so, the iterative procedure described can be recast
as finding x (or y) such that
x = G ◦ F(x) (or y = F ◦ G(y)).
In any case, nonlinear problems need to be solved. For this we employ
Newton’s method with the vectorial problem (132). By using a firstorder approximation, we can write
"
#
k+1 − xk
x
F(xk+1 , yk+1 ) = F(xk , yk ) + DF (xk , yk )
.
yk+1 − yk
163
164
numerical methods for nonlinear problems
The iterative scheme comes from imposing F(xk+1 , yk+1 ) = 0, which
gives the iteration
# " #
"
−1
xk
xk+1
− DF (xk , yk )
F(xk , yk ).
=
k
k+1
y
y
This method is general, and can be used to solve both the monolithic
formulation and the partial problems. We observe that (i) Newton’s
method results in an iterative procedure that can be interpreted as
a fixed-point iteration and that (ii) in many applications the computation of DF (xk , yk ) is very expensive, which motivates the use of
quasi-Newton methods, in which a proxy is used instead:
DF (xk , yk )
−1
≈ H(xk , yk )
−1
.
For a comparison between monolithic and staggered algorithms in
cardiac modeling, see [67, 79].
C
CONVERGENCE OF NONLINEAR MODEL
165
166
convergence of nonlinear model
(a) m.
(b) m.
(c) ys .
(d) ys .
Figure 40: Convergence in space for implicit monolithic formulation.
(a) m.
(b) m.
(c) ys .
(d) ys .
Figure 41: Convergence in space for semi-implicit monolithic formulation.
convergence of nonlinear model
(a) m.
(b) m.
(c) ys .
(d) ys .
Figure 42: Convergence in space for implicit fixed point formulation.
(a) m.
(b) m.
(c) ys .
(d) ys .
Figure 43: Convergence in space for semi-implicit fixed point formulation.
167
168
convergence of nonlinear model
(a) m.
(b) m.
(c) ys .
(d) ys .
Figure 44: Convergence in time for implicit monolithic formulation.
(a) m.
(b) m.
(c) ys .
(d) ys .
Figure 45: Convergence in time for semi-implicit monolithic formulation.
convergence of nonlinear model
(a) m.
(b) m.
(c) ys .
(d) ys .
Figure 46: Convergence in time for implicit fixed point formulation.
(a) m.
(b) m.
(c) ys .
(d) ys .
Figure 47: Convergence in time for semi-implicit fixed point formulation.
169
BIBLIOGRAPHY
[1]
J.H. Adler, F.J. Gaspar, X. Hu, C. Rodrigo, and L.T. Zikatanov.
“Robust block preconditioners for Biot’s model.” In: International Conference on Domain Decom
Springer. 2017, pp. 3–16.
[2]
J. Ahrens, B. Geveci, and C. Law. “Paraview: An end-user tool
for large data visualization.” In: The visualization handbook
717 (2005).
[3]
A.C. Aitken. “XXV.—On Bernoulli’s Numerical Solution of Algebraic Equations.” In: Proceedings of the Royal Society of Edinburgh
46 (1927), pp. 289–305.
[4]
D. Algranati, G.S. Kassab, and Y. Lanir. “Mechanisms of myocardiumcoronary vessel interaction.” In: American Journal of Physiology - Heart and Circulatory Physiol
298.3 (2010), H861–H873. doi: 10.1152/ajpheart.00925.2009.
[5]
I. Ambartsumyan, E. Khattatov, I. Yotov, and P. Zunino. “A Lagrange multiplier method for a Stokes–Biot fluid–poroelastic
structure interaction model.” In: Numerische Mathematik 140.2
(2018), pp. 513–553. doi: 10.1007/s00211-018-0967-1.
[6]
A. Ambrosetti and G. Prodi. A primer of nonlinear analysis.
34. Cambridge University Press, 1995.
[7]
M.H. Armstrong, A. Buganza Tepole, E. Kuhl, B.R. Simon, and
J.P. Vande Geest. “A finite element model for mixed porohyperelasticity with transport, swelling, and growth.” In: PLoS ONE
11.4 (2016). doi: 10.1371/journal.pone.0152806.
[8]
T. Arts, R.S. Reneman, and P.C. Veenstra. “A model of the mechanics of the left ventricle.” In: Annals of biomedical engineering
7.3-4 (1979), pp. 299–318.
[9]
C.M. Augustin, A. Neic, M. Liebmann, A.J. Prassl, S.A. Niederer,
G. Haase, and G. Plank. “Anatomically accurate high resolution modeling of human whole heart electromechanics: a
strongly scalable algebraic multigrid solver method for nonlinear deformation.” In: Journal of computational physics 305
(2016), pp. 622–646.
[10]
S. Badia, A. Quaini, and A. Quarteroni. “Coupling Biot and
Navier-Stokes equations for modelling fluid-poroelastic media interaction.” In: Journal of Computational Physics 228.21
(2009), pp. 7986–8014. doi: 10.1016/j.jcp.2009.07.019.
[11]
J.M. Ball. “Convexity conditions and existence theorems in
nonlinear elasticity.” In: Archive for rational mechanics and Analysis
63.4 (1976), pp. 337–403.
171
172
bibliography
[12]
W. Bangerth, R. Hartmann, and G. Kanschat. “deal. II—a generalpurpose object-oriented finite element library.” In: ACM Transactions on Mathema
33.4 (2007), 24–es.
[13]
N.A. Barnafi, S. Di Gregorio, L. Dede’, P. Zunino, C. Vergara,
and A.M. Quarteroni. “An integrated multiscale poromechanics model of perfusion with cardiac function and systemic circulation.” In: In preparation (2020).
[14]
N.A. Barnafi, P. Zunino, L. Dedè, and A. Quarteroni. “Mathematical analysis and numerical approximation of a general linearized poro-hyperelastic model.” In: Computers & Mathematics with Application
(2020).
[15]
M. Bause, J.W Both, and F.A. Radu. Iterative Coupling for Fully Dynamic Poroelast
2019. arXiv: 1912.05174 [math.NA].
[16]
J.D. Bayer, R.C. Blake, G. Plank, and N.A. Trayanova. “A novel
rule-based algorithm for assigning myocardial fiber orientation to computational heart models.” In: Annals of Biomedical Engineering
40.10 (2012), pp. 2243–2254. doi: 10.1007/s10439-012-0593-5.
[17]
D.A. Beard and J.B. Bassingthwaighte. “The fractal nature of
myocardial blood flow emerges from a whole-organ model of
arterial network.” In: Journal of vascular research 37.4 (2000),
pp. 282–296.
[18]
A. Beck. “On the Convergence of Alternating Minimization for
Convex Programming with Applications to Iteratively Reweighted
Least Squares and Decomposition Schemes.” In: SIAM Journal on Optimization
25.1 (2015), pp. 185–209.
[19]
M. Benzi, G.H. Golub, and J. Liesen. “Numerical solution of
saddle point problems.” In: Acta Numerica 14 (2005), pp. 1–
137. doi: 10.1017/S0962492904000212.
[20]
M. Benzi, J.C. Haws, and M. Tůma. “Preconditioning highly indefinite and nonsymmetric matrices.” In: SIAM Journal on Scientific Computing
22.4 (2001), pp. 1333–1353. doi: 10.1137/S1064827599361308.
[21]
M. Bernal, I. Nenadic, M.W. Urban, and J.F. Greenleaf. “Material property estimation for tubes and arteries using ultrasound radiation force and analysis of propagating modes.” In:
The Journal of the Acoustical Society of America 129.3 (2011),
pp. 1344–1354.
[22]
C. Bernardi, C. Canuto, and Y. Maday. “Generalized Inf-Sup
Conditions for Chebyshev Spectral Approximation of the Stokes
Problem.” In: SIAM Journal on Numerical Analysis 25.6 (1988),
pp. 1237–1271. issn: 00361429. url: http : / / www . jstor . org /
stable/2157483.
[23]
M.A. Biot. “General theory of three-dimensional consolidation.” In: Journal of Applied Physics 12.2 (1941), pp. 155–164.
doi: 10.1063/1.1712886.
bibliography
173
[24]
M.A. Biot. “Theory of elasticity and consolidation for a porous
anisotropic solid.” In: Journal of Applied Physics 26.2 (1955),
pp. 182–185. doi: 10.1063/1.1721956.
[25]
M.A. Biot. “General solutions of the equations of elasticity and
consolidation for a porous material.” In: J. Appl. Mech. 23.1
(1956), pp. 91–96.
[26]
M.A. Biot. “Mechanics of deformation and acoustic propagation in porous media.” In: Journal of Applied Physics 33.4 (1962),
pp. 1482–1498. doi: 10.1063/1.1728759.
[27]
M.A. Biot. “Theory of finite deformations of porous solids.”
In: Indiana Univ. Math. J. 21.7 (1972), pp. 597–620.
[28]
M.J. Bishop and G. Plank. “Bidomain ECG simulations using
an augmented monodomain model for the cardiac source.” In:
IEEE transactions on biomedical engineering 58.8 (2011), pp. 2297–
2307.
[29]
B. Björnsson et al. “Digital twins to personalize medicine.” In:
Genome Medicine 12.1 (2020), pp. 1–4.
[30]
P.J. Blanco, R.A.B. de Queiroz, and R.A. Feijóo. “A computational approach to generate concurrent arterial networks in
vascular territories.” In: International journal for numerical methods in biomedical engineering
29.5 (2013), pp. 601–614.
[31]
D. Boffi. “Stability of higher order triangular Hood-Taylor methods for the stationary Stokes equations.” In: Mathematical Models and Methods in Applied Scien
4.02 (1994), pp. 223–235.
[32]
D. Boffi. “Three-dimensional finite element methods for the
Stokes problem.” In: SIAM Journal on Numerical Analysis 34.2
(1997), pp. 664–670.
[33]
D. Boffi, F. Brezzi, and M. Fortin. Mixed Finite Element Methods and Applications.
Springer Series in Computational Mathematics. Springer Berlin
Heidelberg, 2013. isbn: 9783642365195.
[34]
M.A. Borregales, K. Kumar, J.M. Nordbotten, and F.A. Radu.
“Iterative solvers for Biot model under small and large deformation.” In: arXiv e-prints, arXiv:1905.12996 (May 2019), arXiv:1905.12996.
arXiv: 1905.12996 [math.NA].
[35]
J.W. Both. On the rate of convergence of alternating minimization for non-smooth non-strongly c
2019. arXiv: 1911.00404 [math.OC].
[36]
J.W. Both, N.A. Barnafi, F.A. Radu, P. Zunino, and A.M. Quarteroni. “Iterative splitting schemes for a soft material poromechanics model.” In: arXiv preprint arXiv:2011.13296 (2021).
[37]
J.W. Both, M. Borregales, J.M. Nordbotten, K. Kumar, and F.A.
Radu. “Robust fixed stress splitting for Biot’s equations in heterogeneous media.” In: Applied Mathematics Letters 68 (2017),
pp. 101 –108. issn: 0893-9659.
174
bibliography
[38]
J.W. Both, K. Kumar, J.M. Nordbotten, and F.A. Radu. “Anderson accelerated fixed-stress splitting schemes for consolidation
of unsaturated porous media.” In: Computers & Mathematics with Applications
77.6 (2019). 7th International Conference on Advanced Computational Methods in Engineering (ACOMEN 2017), pp. 1479
–1502. issn: 0898-1221.
[39]
J.W. Both, K. Kumar, J.M. Nordbotten, and F.A. Radu. “The
gradient flow structures of thermo-poro-visco-elastic processes
in porous media.” In: arXiv e-prints, arXiv:1907.03134 (2019).
arXiv: 1907.03134 [math.NA].
[40]
R.M. Bowen. “Incompressible porous media models by use of
the theory of mixtures.” In: International Journal of Engineering Science
18.9 (1980), pp. 1129–1148. doi: 10.1016/0020-7225(80)90114-7.
[41]
R.M. Bowen. “Compressible porous media models by use of
the theory of mixtures.” In: International Journal of Engineering Science
20.6 (1982), pp. 697–735. doi: 10.1016/0020-7225(82)90082-9.
[42]
S. Brenner and R. Scott. The Mathematical Theory of Finite Element Methods.
Texts in Applied Mathematics. Springer New York, 2007. isbn:
9780387759333.
[43]
H. Brezis. Functional Analysis, Sobolev Spaces and Partial Differential Equations.
Springer Science & Business Media, 2010.
[44]
P. Bruinsma, T. Arts, J. Dankelman, and J.A.E. Spaan. “Model
of the coronary circulation based on pressure dependence of
coronary resistance and compliance.” In: Basic research in cardiology
83.5 (1988), pp. 510–524.
[45]
K. Bruynseels, F. Santoni de Sio, and J. van den Hoven. “Digital twins in health care: ethical implications of an emerging engineering paradigm.” In: Frontiers in genetics 9 (2018), p. 31.
[46]
A. Bueno-Orovio, E.M. Cherry, and F.H. Fenton. “Minimal
model for human ventricular action potentials in tissue.” In:
Journal of theoretical biology 253.3 (2008), pp. 544–560.
[47]
P. de Buhan, X. Chateau, and L. Dormieux. “The constitutive
equations of finite strain poroelasticity in the light of a micromacro approach.” In: (1998).
[48]
M. Bukač, I. Yotov, R. Zakerzadeh, and P. Zunino. “Effects of
poroelasticity on fluid-structure interaction in arteries: A computational sensitivity study.” In: Modeling, Simulation and Applications
14 (2015), pp. 197–220. doi: 10.1007/978-3-319-05230-4 8.
[49]
B. Burtschell, D. Chapelle, and P. Moireau. “Effective and energypreserving time discretization for a general nonlinear poromechanical formulation.” In: Computers and Structures 182 (2017),
pp. 313–324. doi: 10.1016/j.compstruc.2016.10.022.
bibliography
175
[50]
B. Burtschell, P. Moireau, and D. Chapelle. “Numerical Analysis for an Energy-stable Total Discretization of a Poromechanics Model with Inf-sup Stability.” In: Acta Mathematicae Applicatae Sinica
35.1 (2019), pp. 28–53. doi: 10.1007/s10255-019-0799-5.
[51]
J. Cahouet and J.P. Chabard. “Some fast 3D finite element
solvers for the generalized Stokes problem.” In: International Journal for Numerical Methods in F
8.8 (1988), pp. 869–895.
[52]
S. Campbell. Singular systems of differential equations. Vol. 1.
Pitman London, 1980.
[53]
N. Castelletto, J.A. White, and H.A. Tchelepi. “Accuracy and
convergence properties of the fixed-stress iterative solution of
two-way coupled poromechanics.” In: International Journal for Numerical and Analytical Metho
39.14 (2015), pp. 1593–1618. doi: 10.1002/nag.2400.
[54]
R. Chabiniok et al. “Multiphysics and multiscale modelling,
data–model fusion and integration of organ physiology in the
clinic: Ventricular cardiac mechanics.” In: Interface Focus 6.2
(2016). doi: 10.1098/rsfs.2015.0083.
[55]
D. Chapelle, J.F. Gerbeau, J. Sainte-Marie, and I.E. VignonClementel. “A poroelastic model valid in large strains with applications to perfusion in cardiac modeling.” In: Computational Mechanics
46.1 (2010), pp. 91–101. doi: 10.1007/s00466-009-0452-x.
[56]
D. Chapelle and P. Moireau. “General coupling of porous flows
and hyperelastic formulations - From thermodynamics principles to energy balance and compatible time schemes.” In:
European Journal of Mechanics, B/Fluids 46 (2014), pp. 82–96.
doi: 10.1016/j.euromechflu.2014.02.009.
[57]
A.J. Chorin. “A numerical method for solving incompressible
viscous flow problems.” In: Journal of Computational Physics
2.1 (1967), pp. 12–26. doi: 10.1016/0021-9991(67)90037-X.
[58]
Y.K. Chow and S. Kay. “On the Aitken acceleration method for
nonlinear problems.” In: Computers & structures 19.5-6 (1984),
pp. 757–761.
[59]
P.G. Ciarlet. Mathematical Elasticity: Volume I: three-dimensional elasticity.
North-Holland, 1988.
[60]
A.N. Cookson, J.J. Lee, C. Michler, R. Chabiniok, E. Hyde, D.A.
Nordsletten, M. Sinclair, M. Siebes, and N.P. Smith. “A novel
porous mechanical framework for modelling the interaction
between coronary perfusion and myocardial mechanics.” In:
Journal of biomechanics 45.5 (2012), pp. 850–855.
[61]
E. Cosserat and F. Cosserat. Sur la deformation infiniment petite d’un ellipsoı̈de elastique.
Gauthier-Villars, 1898.
[62]
E. Cosserat and F. Cosserat. Sur les equations de la theorie de l’elasticité.
1898.
176
bibliography
[63]
M. Costabel, M. Crouzeix, M. Dauge, and Y. Lafranche. “The
inf-sup constant for the divergence on corner domains.” In:
Numerical Methods for Partial Differential Equations 31.2 (2015),
pp. 439–458. doi: 10.1002/num.21916.
[64]
“Coupling multi-physics models to cardiac mechanics.” In: Progress in Biophysics
104.1 (2011). Cardiac Physiome project: Mathematical and Modelling Foundations, pp. 77 –88. issn: 0079-6107.
[65]
O. Coussy. Poromechanics. John Wiley & Sons, 2004.
[66]
R. de Boer. Trends in Continuum Mechanics of Porous Media.
Vol. 18. Springer Science & Business Media, 2005.
[67]
L. Dede, A. Gerbi, and A. Quarteroni. “Segregated algorithms
for the numerical simulation of cardiac electromechanics in
the left human ventricle.” In: The Mathematics of Mechanobiology.
Springer, 2020, pp. 81–116.
[68]
Luca Dedè, Filippo Menghini, and Alfio Quarteroni. “Computational fluid dynamics of blood flow in an idealized left human heart.” In: International Journal for Numerical Methods in Biomedical Engine
(2019), e3287.
[69]
S. Deparis, M. Discacciati, G. Fourestey, and A. Quarteroni.
“Fluid–structure algorithms based on Steklov–Poincaré operators.” In: Computer Methods in Applied Mechanics and Engineering
195.41-43 (2006), pp. 5797–5812.
[70]
S. Di Gregorio, M. Fedele, G. Pontone, A.F. Corno, P. Zunino,
C. Vergara, and A. Quarteroni. “A computational model applied to myocardial perfusion in the human heart: from large
coronaries to microvasculature.” In: Journal of Computational Physics
(2020), p. 109836.
[71]
J.M. Downey and E.S. Kirk. “Inhibition of coronary blood flow
by a vascular waterfall mechanism.” In: Circulation research
36.6 (1975), pp. 753–760.
[72]
L.C. Evans. Partial Differential Equations. Graduate Studies in
Mathematics. American Mathematical Society, 1998. isbn: 9780821807729.
[73]
T.E. Fastl, C. Tobon-Gomez, W.A. Crozier, J. Whitaker, R. Rajani, K.P. McCarthy, D. Sanchez-Quintana, S.Y. Ho, M.D. O’Neill,
and G. Plank. “Personalized modeling pipeline for left atrial
electromechanics.” In: 2016 Computing in Cardiology Conference (CinC).
IEEE. 2016, pp. 225–228.
[74]
L. Formaggia, A. Quarteroni, and A. Veneziani. “Multiscale
models of the vascular system.” In: Cardiovascular mathematics.
Springer, 2009, pp. 395–446.
[75]
M. Foss, W.J. Hrusa, and V.J. Mizel. “The Lavrentiev gap phenomenon in nonlinear elasticity.” In: Archive for rational mechanics and analysis
167.4 (2003), pp. 337–365.
bibliography
177
[76]
P.C. Franzone, L. Franco Pavarino, and S. Scacchi. Mathematical cardiac electrophysiology.
Vol. 13. Springer, 2014.
[77]
P.C. Franzone, L.F. Pavarino, and S. Scacchi. “Parallel multilevel solvers for the cardiac electro-mechanical coupling.” In:
Applied Numerical Mathematics 95 (2015), pp. 140–153.
[78]
D. Gallistl. “Rayleigh-Ritz approximation of the inf-sup constant for the divergence.” In: Mathematics of Computation 88.315
(2018), pp. 73–89. doi: 10.1090/mcom/3327.
[79]
A. Gerbi, L. Dedè, and A. Quarteroni. “A monolithic algorithm
for the simulation of cardiac electromechanics in the human
left ventricle.” In: (2019).
[80]
S. Göktepe and E. Kuhl. “Electromechanics of the heart: a unified approach to the strongly coupled excitation–contraction
problem.” In: Computational Mechanics 45.2-3 (2010), pp. 227–
243.
[81]
A. Goriely, M.G.D. Geers, G.A. Holzapfel, J. Jayamohan, A.
Jérusalem, S. Sivaloganathan, W. Squier, J.A.W. van Dommelen, S. Waters, and E. Kuhl. “Mechanics of the brain: Perspectives, challenges, and opportunities.” In: Biomechanics and Modeling in Mechanobiology
14.5 (2015), pp. 931–965. doi: 10.1007/s10237-015-0662-4.
[82]
P. Gould, D. Ghista, L. Brombolich, and I. Mirsky. “In vivo
stresses in the human left ventricular wall: analysis accounting for the irregular 3-dimensional geometry and comparison
with idealised geometry analyses.” In: Journal of biomechanics
5.5 (1972), pp. 521–539.
[83]
T. Grandits, K. Gillette, A. Neic, J. Bayer, E. Vigmond, T. Pock,
and G. Plank. “An inverse Eikonal method for identifying ventricular activation sequences from epicardial activation maps.”
In: Journal of Computational Physics 419 (2020). doi: 10.1016/
j.jcp.2020.109700.
[84]
P. Grisvard. Elliptic Problems in Nonsmooth Domains. SIAM,
2011.
[85]
J.M. Guccione, K.D. Costa, and A.D. McCulloch. “Finite element stress analysis of left ventricular mechanics in the beating dog heart.” In: Journal of biomechanics 28.10 (1995), pp. 1167–
1177.
[86]
J.M. Guccione and A.D. McCulloch. “Mechanics of active contraction in cardiac muscle: part I—constitutive relations for
fiber stress that describe deactivation.” In: (1993).
[87]
J.M. Guccione, A.D. McCulloch, and L.K. Waldman. “Passive
material properties of intact ventricular myocardium determined from a cylindrical model.” In: Journal of biomechanical engineering
113.1 (1991), pp. 42–55.
178
bibliography
[88]
C. Guiot, P.G. Pianta, C. Cancelli, and T.J. Pedley. “Prediction
of coronary blood flow with a numerical model based on collapsible tube dynamics.” In: American Journal of Physiology-Heart and Circulator
258.5 (1990), H1606–H1614.
[89]
M.E. Gurtin and W.O. Williams. “On the clausius-duhem inequality.” In: Zeitschrift für angewandte Mathematik und Physik ZAMP
17.5 (1966), pp. 626–633.
[90]
A.C. Guyton and J.E. Hall. “Medical physiology.” In: Gökhan N, cCavucsoğlu H (cC
3 (2006).
[91]
J. Hadamard. “Sur les problèmes aux dérivées partielles et
leur signification physique.” In: Princeton University bulletin
(1902), pp. 49–52.
[92]
J.B. Haga, H. Osnes, and H.P. Langtangen. “Efficient block preconditioners for the coupled equations of pressure and deformation in highly discontinuous media.” In: International Journal for Numerical an
35.13 (2011), pp. 1466–1482. doi: 10.1002/nag.973.
[93]
E. Hairer, C. Lubich, and G. Wanner. Geometric numerical integration: structure-pr
Vol. 31. Springer Science & Business Media, 2006.
[94]
M.R. Hoenig, C. Bianchi, A. Rosenzweig, and F.W. Sellke. “The
cardiac microvasculature in hypertension, cardiac hypertrophy and diastolic heart failure.” In: Current vascular pharmacology
6.4 (2008), pp. 292–300.
[95]
J.I. Hoffman and J.A. Spaan. “Pressure-flow relations in coronary circulation.” In: Physiological Reviews 70.2 (1990), pp. 331–
390.
[96]
G.A. Holzapfel. “Nonlinear solid mechanics: A continuum approach for engineering science.” In: Meccanica 37.4 (2002), pp. 489–
490.
[97]
G.A. Holzapfel and R.W. Ogden. Mechanics of biological tissue.
2006, pp. 1–522. doi: 10.1007/3-540-31184-X.
[98]
M.C. Hsu and Y. Bazilevs. “Blood vessel tissue prestress modeling for vascular fluid–structure interaction simulation.” In:
Finite Elements in Analysis and Design 47.6 (2011), pp. 593–
599.
[99]
J.D. Hunter. “Matplotlib: A 2D graphics environment.” In: Computing in science &
9.3 (2007), pp. 90–95.
[100]
J.K. Hunter. “Notes on partial differential equations.” In: Lecture Notes, https://w
(2014).
[101]
Y. Huo, B. Kaimovitz, Y. Lanir, T. Wischgoll, J.I.E. Hoffman,
and G.S. Kassab. “Biophysical model of the spatial heterogeneity of myocardial flow.” In: Biophysical journal 96.10 (2009),
pp. 4035–4043.
bibliography
179
[102]
J.M. Huyghe, T. Arts, D.H. van Campen, and R.S. Reneman.
“Porous medium finite element model of the beating left ventricle.” In: American Journal of Physiology-Heart and Circulatory Physiology
262.4 (1992), H1256–H1267.
[103]
T. Hytönen, J. van Neerven, M. Veraar, and L. Weis. Analysis in Banach spaces.
Vol. 12. Springer, 2016.
[104]
R.F. Janz and A.F. Grimm. “Finite-Element Model for the Mechanical Behavior of the Left Ventricle: prediction of deformation in the potassium-arrested rat heart.” In: Circulation research
30.2 (1972), pp. 244–252.
[105]
E. Jones, T.E. Oliphant, P. Peterson, et al. SciPy: Open source scientific tools for Python.
2001.
[106]
A. Karimi, T. Sera, S. Kudo, and M. Navidbakhsh. “Experimental verification of the healthy and atherosclerotic coronary
arteries incompressibility via digital image correlation.” In:
Artery Research 16 (2016), pp. 1–7.
[107]
A.M. Katz. Physiology of the Heart. Lippincott Williams & Wilkins,
2010.
[108]
H.J. Kim, I.E. Vignon-Clementel, J.S. Coogan, C.A. Figueroa,
K.E. Jansen, and C.A. Taylor. “Patient-specific modeling of
blood flow and pressure in human coronary arteries.” In: Annals of biomedical engineering
38.10 (2010), pp. 3195–3209.
[109]
H.J. Kim, I.E. Vignon-Clementel, C.A. Figueroa, K.E. Jansen,
and C.A. Taylor. “Developing computational methods for threedimensional finite element simulations of coronary blood flow.”
In: Finite Elements in Analysis and Design 46.6 (2010), pp. 514–
525.
[110]
J. Kim, H. A Tchelepi, and R. Juanes. “Stability, accuracy and
efficiency of sequential methods for coupled flow and geomechanics.” In: SPE reservoir simulation symposium. Society of
Petroleum Engineers. 2009.
[111]
J. Kim, H.A. Tchelepi, and R. Juanes. “Stability and convergence of sequential methods for coupled flow and geomechanics: Drained and undrained splits.” In: Computer Methods in Applied Mechanics and Engineerin
200.23 (2011), pp. 2094 –2116. issn: 0045-7825.
[112]
P.R. Konduri, H.A. Marquering, E.E. van Bavel, A. Hoekstra,
C.B.L.M. Majoie, and The INSIST Investigators. “In-Silico Trials for Treatment of Acute Ischemic Stroke.” In: Frontiers in Neurology
11 (2020), p. 1062. issn: 1664-2295. doi: 10 . 3389 / fneur . 2020 .
558125. url: https : / / www . frontiersin . org / article / 10 . 3389 /
fneur.2020.558125.
180
bibliography
[113]
D. Krause, M. Potse, T. Dickopf, R. Krause, A. Auricchio, and F.
Prinzen. “Hybrid parallelization of a large-scale heart model.”
In: Facing the Multicore-Challenge II. Springer, 2012, pp. 120–
132.
[114]
J.Y. Kresh, M.A. Cobanoglu, and S.K. Brockman. “The intramyocardial pressure: a parameter of heart contractility.” In: The Journal of heart transp
4.2 (1985), pp. 241–246.
[115]
M. Landajuela, C. Vergara, A. Gerbi, L. Dedè, L. Formaggia,
and A. Quarteroni. “Numerical approximation of the electromechanical coupling in the left ventricle with inclusion of the
Purkinje network.” In: International journal for numerical methods in biomedical e
34.7 (2018), e2984.
[116]
J. Lee, S. Niederer, D. Nordsletten, I. Le Grice, B. Smail, D. Kay,
and N.P. Smith. “Coupling contraction, excitation, ventricular and coronary blood flow across scale and physics in the
heart.” In: Philosophical Transactions of the Royal Society A: Mathematical, Physic
367.1896 (2009), pp. 2311–2331.
[117]
J. Lee and N.P. Smith. “The multi-scale modelling of coronary blood flow.” In: Annals of biomedical engineering 40.11
(2012), pp. 2399–2413.
[118]
J.J. Lee, K.A. Mardal, and R. Winther. “Parameter-robust discretization and preconditioning of Biot’s consolidation model.”
In: SIAM Journal on Scientific Computing 39.1 (2017), A1–A24.
[119]
J.J. Lee, D. Nordsletten, A. Cookson, S. Rivolo, and N. Smith.
“In silico coronary wave intensity analysis: application of an
integrated one-dimensional and poromechanical model of cardiac perfusion.” In: Biomechanics and Modeling in Mechanobiology
15.6 (2016), pp. 1535–1555. doi: 10.1007/s10237-016-0782-5.
[120]
R. Lehoucq, D. Sorensen, and C. Yang. ARPACK users’ guide: solution of large-sca
Vol. 6. SIAM, 1998.
[121]
J.R. Levick. An introduction to cardiovascular physiology. ButterworthHeinemann, 2013.
[122]
G. Liew, P. Mitchell, E. Rochtchina, T.Y. Wong, W. Hsu, M.L.
Lee, A. Wainwright, and J.J. Wang. “Fractal analysis of retinal microvasculature and coronary heart disease mortality.”
In: European Heart Journal 32.4 (Dec. 2010), pp. 422–429. issn:
0195-668X. eprint: https://academic.oup.com/eurheartj/articlepdf/32/4/422/1207197/ehq431.pdf.
[123]
A. Logg, K.A. Mardal, and G. Wells. Automated solution of differential equations b
Vol. 84. Springer Science & Business Media, 2012.
bibliography
181
[124]
A. Mahalingam, U.U. Gawandalkar, G. Kini, A. Buradi, T. Araki,
N. Ikeda, A. Nicolaides, J.R. Laird, L. Saba, and J.S. Suri. “Numerical analysis of the effect of turbulence transition on the
hemodynamic parameters in human coronary arteries.” In: Cardiovascular Diagnosis and Therap
6.3 (2016), pp. 208–220. doi: 10.21037/cdt.2016.03.08.
[125]
K.A. Mardal and R. Winther. “Uniform preconditioners for the
time dependent Stokes problem.” In: Numerische Mathematik
98.2 (2004), pp. 305–327.
[126]
A.T. Marmor, D.S. Blondheim, E. Gozlan, E. Navo, and D.
Front. “Method for noninvasive measurement of central aortic
systolic pressure.” In: Clinical cardiology 10.4 (1987), pp. 215–
221.
[127]
L. Marx, M.A.F. Gsell, A. Rund, F. Caforio, A.J. Prassl, G. TothGayor, T. Kuehne, C.M. Augustin, and G. Plank. “Personalization of electro-mechanical models of the pressure-overloaded
left ventricle: fitting of Windkessel-type afterload models.” In:
Philosophical Transactions of the Royal Society A 378.2173 (2020),
p. 20190342.
[128]
C. Michler, A.N. Cookson, R. Chabiniok, E. Hyde, J. Lee, M.
Sinclair, T. Sochi, A. Goyal, G. Vigueras, and D.A. Nordsletten.
“A computationally efficient framework for the simulation of
cardiac perfusion using a multi-compartment Darcy porousmedia flow model.” In: International journal for numerical methods in biomedical engineering
29.2 (2013), pp. 217–232.
[129]
A. Mikelić and M.F. Wheeler. “Convergence of iterative coupling for coupled flow and geomechanics.” In: Computational Geosciences
17.3 (2013), pp. 455–461.
[130]
G. Milde. “isomath: Math for scientists.” In: (2008).
[131]
M.U.R. Naidu and C.P. Reddy. “Non-invasive measurement
of aortic pressure in patients: Comparing pulse wave analysis
and applanation tonometry.” In: Indian journal of pharmacology
44.2 (2012), p. 230.
[132]
R. Namani, G.S. Kassab, and Y. Lanir. “Morphometric reconstruction of coronary vasculature incorporating uniformity of
flow dispersion.” In: Frontiers in physiology 9 (2018), p. 1069.
[133]
R. Namani, L.C. Lee, Y. Lanir, B. Kaimovitz, S.M. Shavik, and
G.S. Kassab. “Effects of myocardial function and systemic circulation on regional coronary perfusion.” In: Journal of Applied Physiology
128.5 (2020), pp. 1106–1122.
[134]
M.P. Nash and P.J. Hunter. “Computational mechanics of the
heart. From tissue structure to ventricular function.” In: Journal of Elasticity
61.1-3 (2000), pp. 113–141. doi: 10.1023/A:1011084330767.
[135]
F.H. Netter. Atlas of human anatomy, Professional Edition E-Book: including NetterReference. co
Elsevier Health Sciences, 2014.
182
bibliography
[136]
S.A. Niederer, K.S. Campbell, and S.G. Campbell. “A short
history of the development of mathematical models of cardiac
mechanics.” In: Journal of molecular and cellular cardiology 127
(2019), pp. 11–19.
[137]
S.A. Niederer, M. Fink, D. Noble, and N.P. Smith. “A metaanalysis of cardiac electrophysiology computational models.”
In: Experimental physiology 94.5 (2009), pp. 486–495.
[138]
S.A. Niederer, P.J. Hunter, and N.P. Smith. “A quantitative
analysis of cardiac myocyte relaxation: a simulation study.”
In: Biophysical journal 90.5 (2006), pp. 1697–1722.
[139]
S.A. Niederer and N.P. Smith. “An improved numerical method
for strong coupling of excitation and contraction models in the
heart.” In: Progress in biophysics and molecular biology 96.13 (2008), pp. 90–111.
[140]
S.A. Niederer and N.P. Smith. “The role of the Frank–Starling
law in the transduction of cellular work to whole organ pump
function: a computational modeling analysis.” In: PLoS Comput Biol
5.4 (2009), e1000371.
[141]
F. Nobile, A. Quarteroni, and R. Ruiz-Baier. “An active strain
electromechanical model for cardiac tissue.” In: International Journal for Numerica
28.1 (), pp. 52–71.
[142]
D. Noble. “A modification of the Hodgkin—Huxley equations
applicable to Purkinje fibre action and pacemaker potentials.”
In: The Journal of physiology 160.2 (1962), p. 317.
[143]
A. Noordergraaf, P.D. Verdouw, and H.B.K. Boom. “The use of
an analog computer in a circulation model.” In: Progress in Cardiovascular Disease
5.5 (1963), pp. 419–439.
[144]
D.A. Nordsletten, S.A. Niederer, M.P. Nash, P.J. Hunter, and
N.P. Smith. “Coupling multi-physics models to cardiac mechanics.” In: Progress in biophysics and molecular biology 104.13 (2011), pp. 77–88.
[145]
T.E. Oliphant. A guide to NumPy. Vol. 1. Trelgol Publishing
USA, 2006.
[146]
M.A. Olshanskii, J. Peters, and A. Reusken. “Uniform preconditioners for a parameter dependent saddle point problem
with application to generalized Stokes interface equations.”
In: Numerische Mathematik 105.1 (2006), pp. 159–191.
[147]
S.C. Panda and R. Natarajan. “Finite-element method of stress
analysis in the human left ventricular layered wall structure.”
In: Medical and Biological Engineering and Computing 15.1 (1977),
pp. 67–71.
bibliography
183
[148]
E. Passini, O.J. Britton, H.R. Lu, J. Rohrbacher, A.N. Hermans,
D.J. Gallacher, R.J.H. Greig, A. Bueno-Orovio, and B. Rodriguez.
“Human in silico drug trials demonstrate higher accuracy than
animal models in predicting clinical pro-arrhythmic cardiotoxicity.” In: Frontiers in physiology 8 (2017), p. 668.
[149]
J. Peiró and A. Veneziani. “Reduced models of the cardiovascular system.” In: Cardiovascular mathematics. Springer, 2009,
pp. 347–394.
[150]
M.R. Pfaller, J.M. Hörmann, M. Weigl, A. Nagler, R. Chabiniok, C. Bertoglio, and W.A. Wall. “The importance of the pericardium for cardiac biomechanics: from physiology to computational modeling.” In: Biomechanics and modeling in mechanobiology
18.2 (2019), pp. 503–529.
[151]
K.K. Phoon, K.C. Toh, S.H. Chan, and F.H. Lee. “An efficient
diagonal preconditioner for finite element solution of Biot’s
consolidation equations.” In: International Journal for Numerical Methods in Engineering
55.4 (2002), pp. 377–400. doi: 10.1002/nme.500.
[152]
F.A. Potra. “On Q-order and R-order of convergence.” In: Journal of Optimization Theory and Ap
63.3 (1989), pp. 415–431.
[153]
M. Potse. “Scalable and accurate ECG simulation for reactiondiffusion models of the human heart.” In: Frontiers in physiology
9 (2018), p. 370.
[154]
A. Quarteroni, L. Dede’, A. Manzoni, and C. Vergara. Mathematical modelling of the human card
Vol. 33. Cambridge University Press, 2019.
[155]
A. Quarteroni, S. Ragni, and A. Veneziani. “Coupling between
lumped and distributed models for blood flow problems.” In:
Computing and Visualization in Science 4.2 (2001), pp. 111–124.
[156]
A. Quarteroni and A. Valli. Numerical approximation of partial differential equations.
Vol. 23. Springer Science & Business Media, 2008.
[157]
A. Quarteroni, A. Veneziani, and C. Vergara. “Geometric multiscale modeling of the cardiovascular system, between theory
and practice.” In: Computer Methods in Applied Mechanics and Engineering
302 (2016), pp. 193–252.
[158]
A.M. Quarteroni, T. Lassila, S. Rossi, and R. Ruiz-Baier. “Integrated Heart—Coupling multiscale and multiphysics models
for the simulation of the cardiac function.” In: Computer Methods in Applied Mechanics and Eng
314 (2017), pp. 345–407.
[159]
F.A. Radu, J.M. Nordbotten, I.S. Pop, and K. Kumar. “A robust linearization scheme for finite volume based discretizations for simulation of two-phase flow in porous media.” In:
Journal of Computational and Applied Mathematics 289 (2015),
pp. 134–141.
184
bibliography
[160]
T. Ramanathan and H. Skinner. “Coronary blood flow.” In:
Continuing Education in Anaesthesia, Critical Care & Pain 5.2
(2005), pp. 61–64.
[161]
F. Regazzoni, L. Dedè, and A. Quarteroni. “Machine learning
of multiscale active force generation models for the efficient
simulation of cardiac electromechanics.” In: Computer Methods in Applied Mecha
370 (2020), p. 113268.
[162]
F Regazzoni, M. Salvador, P. Africa, M. Fedele, L. Dede’, and A.
Quarteroni. “Electromechanical modeling of the human heart
coupled with a circulation model of the whole cardiovascular
system.” In: In preparation ().
[163]
P. Reymond, F. Merenda, F. Perren, D. Rufenacht, and N. Stergiopulos. “Validation of a one-dimensional model of the systemic arterial tree.” In: American Journal of Physiology-Heart and Circulatory Phy
297.1 (2009), H208–H222.
[164]
P. Reymond, F. Merenda, F. Perren, D. Rüfenacht, and N. Stergiopulos. “Validation of a one-dimensional model of the systemic arterial tree.” In: American Journal of Physiology - Heart and Circulatory Ph
297.1 (2009), H208–H222. doi: 10.1152/ajpheart.00037.2009.
[165]
B.J. Roth and J.P. Wikswo. “A bidomain model for the extracellular potential and magnetic field of cardiac tissue.” In:
IEEE Transactions on Biomedical Engineering 4 (1986), pp. 467–
469.
[166]
Y. Rudy. “From genome to physiome: integrative models of
cardiac excitation.” In: Annals of biomedical engineering 28.8
(2000), pp. 945–950.
[167]
Y. Saad. Iterative methods for sparse linear systems. SIAM, 2003.
[168]
A. Settari and F.M. Mourits. “A Coupled Reservoir and Geomechanical Simulation System.” In: SPE Journal 3.3 (1998),
pp. 219–226. doi: 10.2118/50939-PA.
[169]
J. Shaw, L. Izu, and Y. Chen-Izu. “Mechanical analysis of single
myocyte contraction in a 3-D elastic matrix.” In: PLoS One 8.10
(2013), e75492.
[170]
N. Smith, D. Nickerson, E. Crampin, and P. Hunter. “Computational mechanics of the heart. from tissue structure to ventricular function.” In: Journal of Elasticity 61.1 (2000), pp. 113–
141.
[171]
N.P. Smith. “A computational study of the interaction between
coronary blood flow and myocardial mechanics.” In: Physiological measurement
25.4 (2004), p. 863.
bibliography
185
[172]
R. Stenberg. “Analysis of Mixed Finite Element Methods for
the Stokes Problem: A Unified Approach.” In: Mathematics of Computation
42.165 (1984), pp. 9–23. issn: 00255718, 10886842. url: http :
//www.jstor.org/stable/2007557.
[173]
E. Storvik, J.W. Both, K. Kumar, J.M. Nordbotten, and F.A.
Radu. “On the optimization of the fixed-stress splitting for
Biot’s equations.” In: International Journal for Numerical Methods in Engineering
120.2 (2019), pp. 179–194. eprint: https : / / onlinelibrary. wiley.
com/doi/pdf/10.1002/nme.6130.
[174]
L. Taber and P. Rew. “Poroelastic plate and shell theories.” In:
Mechanics of Poroelastic Media (1996), pp. 323–337.
[175]
A. Tagliabue, L. Dedè, and A. Quarteroni. “Complex blood
flow patterns in an idealized left ventricle: A numerical study.”
In: Chaos: An Interdisciplinary Journal of Nonlinear Science 27.9
(2017), p. 093939.
[176]
C. Taylor and P. Hood. “A numerical solution of the NavierStokes equations using the finite element technique.” In: Computers & Fluids
1.1 (1973), pp. 73–100.
[177]
K.H.W.J. Ten Tusscher, O. Bernus, H.A. Rok, and A.V. Panfilov.
“Comparison of electrophysiological models for human ventricular cells and tissues.” In: Progress in biophysics and molecular biology
90.1-3 (2006), pp. 326–345.
[178]
K. Terzaghi. “Theoretical Soil Mechanics.” In: (1948).
[179]
G.J. Tortora and B.H. Derrickson. Principles of anatomy and physiology.
John Wiley & Sons, 2018.
[180]
L.N. Trefethen and D. Bau III. Numerical linear algebra. Vol. 50.
Siam, 1997.
[181]
R. Témam. “Sur l’approximation de la solution des équations
de Navier-Stokes par la méthode des pas fractionnaires (II).”
In: Archive for Rational Mechanics and Analysis 33.5 (1969), pp. 377–
385. doi: 10.1007/BF00247696.
[182]
T.P. Usyk, I.J. LeGrice, and A.D. McCulloch. “Computational
model of three-dimensional cardiac electromechanics.” In: Computing and Visualization in Scien
4.4 (2002), pp. 249–257. issn: 1432-9360. doi: 10.1007/s00791002-0081-9.
[183]
T.P. Usyk, R. Mazhari, and A.D. McCulloch. “Effect of laminar
orthotropic myofiber architecture on regional stress and strain
in the canine left ventricle.” In: Journal of elasticity and the physical science of solids
61.1-3 (2000), pp. 143–164.
[184]
J.L. Vázquez. The Porous Medium Equation: Mathematical Theory.
Oxford University Press, 2007.
186
bibliography
[185]
R. Verfürth. “Error estimates for a mixed finite element approximation of the Stokes equations.” In: RAIRO. Anal. numér.
18.2 (1984), pp. 175–182. doi: 10.1051/m2an/1984180201751.
[186]
M. Viceconti, A. Henney, and E. Morley-Fletcher. “In silico
clinical trials: how computer simulation will transform the
biomedical industry.” In: International Journal of Clinical Trials
3.2 (2016), pp. 37–46.
[187]
M. A Vis, P. Sipkema, and N. Westerhof. “Modeling pressureflow relations in cardiac muscle in diastole and systole.” In:
American Journal of Physiology-Heart and Circulatory Physiology
272.3 (1997), H1516–H1526.
[188]
A.T. Vuong, L. Yoshihara, and W.A. Wall. “A general approach
for modeling interacting flow through porous media under finite deformations.” In: Computer Methods in Applied Mechanics and Engineering
283 (2015), pp. 1240–1259. doi: 10.1016/j.cma.2014.08.018.
[189]
H.F. Walker and P. Ni. “Anderson acceleration for fixed-point
iterations.” In: SIAM Journal on Numerical Analysis 49.4 (2011),
pp. 1715–1735.
[190]
N. Westerhof, F. Bosman, C.J. De Vries, and A. Noordergraaf.
“Analog studies of the human systemic arterial tree.” In: Journal of biomechanics
2.2 (1969), pp. 121–143.
[191]
N. Westerhof, J.W. Lankhaar, and B.E. Westerhof. “The arterial
windkessel.” In: Medical & biological engineering & computing
47.2 (2009), pp. 131–141.
[192]
S. Whitaker. “Flow in porous media I: A theoretical derivation of Darcy’s law.” In: Transport in porous media 1.1 (1986),
pp. 3–25.
[193]
J.A. White and R.I. Borja. “Block-preconditioned Newton-Krylov
solvers for fully coupled flow and geomechanics.” In: Computational Geosciences
15.4 (2011), pp. 647–659. doi: 10.1007/s10596-011-9233-7.
[194]
J.A. White, N. Castelletto, and H.A. Tchelepi. “Block-partitioned
solvers for coupled poromechanics: A unified framework.” In:
Computer Methods in Applied Mechanics and Engineering 303
(2016), pp. 55–74. doi: 10.1016/j.cma.2016.01.008.
[195]
M. Yang and L.A. Taber. “The possible role of poroelasticity in
the apparent viscoelastic behavior of passive cardiac muscle.”
In: Journal of Biomechanics 24.7 (1991), pp. 587–597. doi: 10.
1016/0021-9290(91)90291-T.
[196]
R. Zakerzadeh and P. Zunino. “A computational framework
for fluid–porous structure interaction with large structural deformation.” In: Meccanica 54.1-2 (2019), pp. 101–121. doi: 10.
1007/s11012-018-00932-x.
bibliography
[197]
187
O.C. Zienkiewicz, D.K. Paul, and A.H.C. Chan. “Unconditionally stable staggered solution procedure for soil-pore fluid interaction problems.” In: International Journal for Numerical Methods in Engineering
26.5 (1988), pp. 1039–1055.
colophon
This document was typeset using the typographical look-and-feel
classicthesis developed by André Miede. The style was inspired by
Robert Bringhurst’s seminal book on typography “The Elements of
Typographic Style”.
 0
0
Anuncio
Documentos relacionados
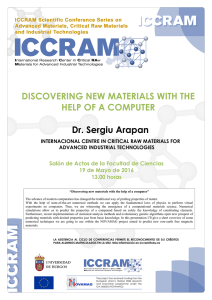





Descargar
Anuncio
Añadir este documento a la recogida (s)
Puede agregar este documento a su colección de estudio (s)
Iniciar sesión Disponible sólo para usuarios autorizadosAñadir a este documento guardado
Puede agregar este documento a su lista guardada
Iniciar sesión Disponible sólo para usuarios autorizados