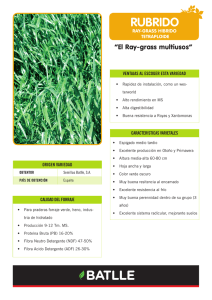
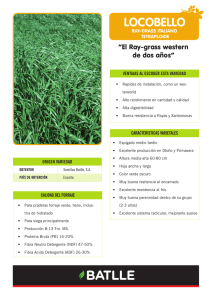
Unidad I “El mundo que veo a futuro es uno donde las computadoras y los humanos estarán en una asociación, y debemos asegurarnos de ser siempre sus amigos”. Steve Wozniak Cofundador de Apple El Cero El cero Los antiguos griegos y los romanos, célebres por sus proezas de ingeniería, carecían de una forma eficaz de lidiar con el número de manzanas que había en una caja vacía. Ellos no lograron dar un nombre a la “nada”. La ciencia depende de el De los grandes inventos del hombre ¿Quién lo invento? Unidad I - Introducción 1. 2. 3. 4. 5. 6. 7. ¿Qué es un modelo? ¿Que es modelación? ¿Qué se puede hacer con un modelo? Modelación de Biosistemas Introducción a MATLAB Un modelo simple en Biosistemas Estructura de un sistema 1. ¿Qué es un modelo? Un modelo es cualquier simplificación de un sistema, que debe contener los atributos funcionales más importantes del sistema real. Es una representación matemática de un sistema. Representación simplificada de un sistema. Un principio básico de la modelación, tanto en Biología como en cualquier disciplina, es mantener el modelo tan simple como sea posible. 2. ¿Qué es modelación? Es el proceso de desarrollo de esa representación La modelación es un proceso de aprendizaje, totalmente repetitivo (iterativo y heurístico), que en cada paso debe construir, revisar, comparar y cambiar el modelo, hasta llegar a una versión final. En cada ciclo se entiende mejor la realidad en estudio. 3. ¿Qué se puede hacer con un modelo? La modelación sirve para auxiliar la conceptualización y la medición en sistemas complejos y algunas veces para predecir las consecuencias de una acción que puede ser cara, difícil o destructiva, como para hacerla en el sistema real. Los modelos pueden hacer considerablemente más, como: entender a detalle un proceso y hasta optimizarlo. Uno de los principales usos de los modelos es generar o comprobar hipótesis 3. ¿Qué se puede hacer con un modelo? Aprender Predecir Tomar decisiones Agregar Libro Principios de Biosistemas, pagina 57 Importancia de la modelación 4. Modelación de Biosistemas Tendencias en Biosistemas Energía Ecoeficiencia Capacidad de carga 5. Introducción a Matlab Matlab es un software matemático. A=2 Vector B = [1 2 3] C = [2:0.5:5] Matriz 2x3 A = [1 2 3; 4 5 6] Introducción a Matlab Operaciones con matrices A = [1 2; 3 4]; B = [-1 0; 1 2]; C = A+B C = A*B C = A./B C = A./A 6. Modelo simple en Biosistemas Como se comporta un sistema sencillo de forraje Sistema dinámico sencillo: forraje Suponer 100 ha de terreno sembrado en forraje, 2 toneladas métricas (TM) de MS/ha (biomasa) Su crecimiento es un 10% de la biomasa actual por mes El forraje se descompone, en promedio, después de los 10 meses En una hoja de papel, dibujar la evolución en tiempo de la cantidad de forraje disponible en este terreno La biomasa de forraje es constante Cantidad de forraje 200 175 150 125 100 0 10 20 Forraje : FH Base 30 40 50 60 70 80 90 100 110 Time (Month) 120 130 140 150 160 170 180 190 200 Forage Tasa de crecimiento = tasa de descomposición Tasas Forraje 20 17.5 15 12.5 10 0 10 20 30 40 50 Tasa de crecimiento forraje : FH Base Tasa de descomposición forraje : FH Base 60 70 80 90 100 110 Time (Month) 120 130 140 150 160 170 180 190 200 Forage/Month Forage/Month El forraje crece exponencialmente Cantidad de forraje 6,000 4,500 3,000 1,500 0 0 10 20 Forraje : FH CrecExp 30 40 50 60 70 80 90 100 110 Time (Month) 120 130 140 150 160 170 180 190 200 Forage Tasas de crecimiento y descomposición Tasa de crecimiento (kg biomasa/mes) = (forraje)*(tasa fraccional) (forraje)*(0.10) Tasa de descomposición (kg biomasa/mes) = (forraje)/(longevidad) (forraje)/(10) = (forraje)(0.10) Tasa neta de crecimiento (kg biomasa/mes) (forraje)*(tasa de crecimiento – tasa de descomposición) (forraje)*(0) = 0 →no cambia Un sistema dinámico sencillo: forraje Suponer 100 ha sembradas en forraje, 2 TM de MS/ha Su crecimiento es un 10% de la biomasa actual por mes El forraje se descompone, en promedio, después de los 12 meses En una hoja de papel, dibujar la evolución en tiempo de la cantidad de forraje disponible en este terreno La tasa de crecimiento > la tasa de descomposición Tasas Forraje 600 450 300 150 0 0 10 20 30 40 50 Tasa de crecimiento forraje : FH CrecExp Tasa de descomposición forraje : FH CrecExp 60 70 80 90 100 110 Time (Month) 120 130 140 150 160 170 180 190 200 Forage/Month Forage/Month Tasas de crecimiento y descomposición Tasa de crecimiento (kg biomasa/mes) = (forraje)*(tasa fraccional) (forraje)*(0.10) Tasa de descomposición (kg biomasa/mes) = (forraje)/(longevidad) (forraje)/(12) = (forraje)(0.083) Tasa neta de crecimiento (kg biomasa/mes) (forraje)*(tasa de crecimiento – tasa de descomposición) (forraje)*(0.0167) >0 →crecimiento exponencial ¿Los sistemas pueden crecer para siempre? No Excepciones ostensibles hasta la fecha: Población (disminución en crecimiento) Crecimiento económico (algunos países) Generalmente, algún recurso es limitante Ej., disponibilidad de nutrientes Existe una capacidad de carga Con base en un recurso renovable La biomasa de forraje con un efecto en crecimiento Suponer que mientras la biomasa de forraje se incrementa, disminuye la tasa fraccional de su crecimiento Suponer los mismos valores previos de las tasas de crecimiento y descomposición En una hoja de papel, dibujar la evolución en tiempo de la biomasa de forraje Crecimiento hasta un límite Cantidad de forraje 400 325 250 175 100 0 10 20 Forraje : FH Limite 30 40 50 60 70 80 90 100 110 Time (Month) 120 130 140 150 160 170 180 190 200 Forage El patrón de biomasa de forraje depende de… La respuesta al aumento en biomasa en la tasa fraccional de su crecimiento Una hipótesis cualitativa sobre esta relación podría ser Tasa fraccional de crecimiento = 0 cuando la biomasa es grande con relación a su valor inicial (5X) Tasa fraccional de crecimiento = 2 cuando la biomasa es pequeña con relación a su valor inicial (0X) Tasa de crecimiento fraccional de forraje = f (biomasa) Graph Lookup - Tasa de crecimiento forraje función de biomasa 2 Efecto sobre tasa de crecimiento (1,1) 0 0 Biomasa relativa 5 Las tasas de crecimiento y descomposición se convergen Tasas Forraje 40 32.5 25 17.5 10 0 10 20 30 40 50 Tasa de crecimiento forraje : FH Limite Tasa de descomposición forraje : FH Limite 60 70 80 90 100 110 Time (Month) 120 130 140 150 160 170 180 190 200 Forage/Month Forage/Month (Sistemas numéricos) El sistema que utilizamos en la actualidad es el hindú- arábigo 123456789 El sistema romano S mitad I uno V cinco X diez L cincuenta C cien D quinientos M mil (Sistemas numéricos) Base 60 Log60(x) Base 10 Log10(x) Base 2 Log2(x) Ejercicio Suponer 32 hectáreas sembradas de tomate, y un rendimiento de 16 kg/m2. la tasa de crecimiento los primeros 3 meses es del 14%, para el mes 4, 5 y 6 es del 11%, inicia la descomposición (longevidad) el mes 7. ¿Cual será la producción total en 9 meses? ¿Cuándo dejarías de invertirle al cultivo y porque? Ejercicio Suponer 18 hectáreas sembradas de camarón, densidad de 22 organismos/m2, biomasa de 5 mg. la tasa de crecimiento las primeras 3 semanas es del 26%, para la semana 4, 5 y 6 es del 15%, inicia la descomposición (longevidad) en la semana 7 . ¿Cual será la producción total en la 9 semana? ¿Cuándo dejarías de invertirle al cultivo y porque? Modelos matemáticos de sistemas físicos Modelo Simple – Biorreactor Suponer un biorreactor con capacidad de 50 litros de agua sembrado con bacterias, 3 mil org/l (biomasa) Su crecimiento es un 12% de la biomasa actual por mes Modelos matemáticos de sistemas físicos Modelo Simple – Biorreactor 2k * 100 = 200 korg en el tiempo = 0, t(0) 200K * 0.12 = 24 + 200 = 224 korg mes 1 224k * 0.12 = 26.88 + 224 = 250.88 Korg mes 2 Crece de forma exponencial Modelo Simple - Biorreactor Suponer 100 litros de agua sembrado con bacterias, 2 mil org/l (biomasa) Su crecimiento es un 12% de la biomasa actual por mes Las bacterias se mueren, en promedio, después de los 10 meses Tasa de crecimiento y tasa de descomposición Tasa de crecimiento (kg biomasa/mes) = (bacterias)*(tasa fraccional) (bacterias)*(0.12) Tasa de mortalidad (kg biomasa/mes) = (bacterias)/(mortalidad) (bacterias)/(10) = (bacterias)(0.10) Tasa neta de crecimiento (kg biomasa/mes) (bacterias)*(tasa de crecimiento – tasa de mortalidad) (bacterias)*(0.02) = > 0 →Si cambia, pero muy poco. Modelos matemáticos de sistemas físicos Resolviendo la ecuación 1. 2. 𝑑𝐵 = 𝐵 ∗ 𝑡𝑐 𝑑𝑡 𝑑𝐵 = 𝑡𝑐 ∗ 𝑑𝑡 𝐵 𝑡𝛼 𝑑𝐵 = 𝑡𝑐 ∗ 𝑡0 𝐵 3. 𝑑𝑡 4. ln 𝐵 = 𝑡𝑐 ∗ 𝑡 + 𝑐 5. 𝑒 ln 𝐵 = 𝑒 𝑡𝑐 ∗ 𝑡 + 𝑐 6. B = 𝐶 𝑒 𝑡𝑐 ∗ 𝑡 7. B = 200 𝑒 0.12 ∗ 𝑡 Unidad II Unidad II – Dinámica de sistemas Estructura de un sistema 2. Sistema dinámico 3. Simulación de sistemas dinámicos 1. 1. Estructura de un sistema Sistema: es una colección de componentes y sus interrelaciones, que han sido agrupados conjuntamente para estudiar alguna parte de la realidad (Jones et al., 1998) 1. Estructura de un sistema: Conceptos La selección de los componentes depende de los objetivos del estudio Los sistemas biológicos se componen de muchos subsistemas vivos y procesos físicos, químicos y biológicos Los sistemas biológicos están organizados jerárquicamente 1. Estructura de un sistema (Jerarquía de los sistemas biológicos) Mundo Regiones Manejo Zonas agrícolas Sistemas de cultivo o ecosistemas de cultivo Investigación Elementos (Plantas individuales) Componentes (hojas, tallos, raíces) Micro-componentes (estomas, ciclos bioquímicos) 1. Estructura de un sistema Biosistema 1. Estructura de un sistema: Conceptos Ambiente. Todo lo que componentes del sistema. no constituye los El ambiente afecta al sistema, pero no es afectado por este. Temperatura, CO2y radiación solar en un cultivo. Fronteras. Límites (abstracción) de los componentes del sistema. 1. Estructura de un sistema: Conceptos Modelo: es una representación matemática de un sistema. Representación simplificada de un sistema Modelación: es el proceso de desarrollo de esa representación Simulación computarizada: Lógica computacional + diagrama de flujo Programación Simulación de Biosistemas: Desarrollo de modelo matemático + simulación computarizada 1. Estructura de un sistema: Conceptos Entradas: Factores que afectan el comportamiento del sistema, pero no son influenciados por este. Variables exógenas, variables conductoras, funciones de forzamiento Lluvia, temperatura, radiación Salidas: Variables que representan el comportamiento característico de interés para el modelador (biomasa, contenido de agua del suelo) 1. Estructura de un sistema: Conceptos Parámetros: Cantidades con valores menos precisos, pero que se suponen constantes durante la simulaciones (coeficiente de intercepción de la luz) Constantes: Cantidades con valores precisos y confiables que permanecen iguales bajo diferentes condiciones experimentales (peso molecular de glucosa, segundos por día) 1. Estructura de un sistema: Conceptos Variables de estado: Cantidades que describen la condición de los componentes del sistema. Cambian con el tiempo en un sistema dinámico. (contenido de agua del suelo y biomasa) Modelos de procesos: Las interrelaciones entre los componentes de un sistema y por lo tanto entre las variables de estado, se deben a procesos. Un modelo orientado a procesos describe el flujo y acumulación de masa, energía u otras sustancias. Estructura de un sistema: Conceptos La variable de estado biomasa cambia como resultado de la fotosíntesis y respiración La variable de estado agua en el suelo cambia como resultado de la lluvia, escorrentía, percolación, evapotranspiración Modelo de un cultivo: Conjunto de relaciones matemáticas que describen los cambios de las variables de estado como resultado de la ocurrencia de varios procesos. Estructura de un sistema: Tipos de modelos Determinísticos: Hacen predicciones definidas para cantidades como peso seco de plantas o consumo animal, sin ninguna distribución de probabilidades Estocásticos: Incluyen elementos aleatorios como parte del modelo, las predicciones tienen asociada una distribución de probabilidad Estructura de un sistema: Tipos de modelos Dinámicos: Predicen como las cantidades varían con el tiempo Se presentan como un conjunto de ecuaciones diferenciales ordinarias, donde t es la variable independiente Se presentan como un conjunto de ecuaciones de diferencias Estáticos: No contienen el tiempo como una variable y no hacen predicciones dependientes del tiempo 1. Estructura de un sistema: Tipos de modelos Empíricos: El objetivo principal es describir la respuesta de un sistema, usando ecuaciones matemáticas o estadísticas sin contenido científico y sin restricciones por principios científicos Descripciones de datos Mecanicistas: Proporcionan un grado de comprensión o explicación del fenómeno que se modela Al menos dos niveles descripción deben ser considerados (eg. Planta y órgano) 1. Estructura de un sistema: Tipos de modelos Considera relaciones causales entre las cantidades y mecanismos (procesos) representados en un nivel inferior y los fenómenos que se predicen en el nivel superior Las tasas de crecimiento de una planta/cultivo (fenómeno de un nivel superior) pueden ser interpretadas en términos de la operación de los procesos de fotosíntesis, distribución de sustratos, respiración, absorción de nitrógeno y transpiración (procesos de bajo nivel) Son abiertos a modificación y extensión sin límite 1. Estructura de un sistema: Tipos de modelos Un modelo mecanicista se basa en nuestras ideas de cómo trabaja un sistema, cuales son los elementos importantes y como se relacionan. Están más orientados a la investigación que hacia las aplicaciones Pueden representar lo que conocemos científicamente de un sistema y sus componentes 1. Estructura de un sistema: Tipos de modelos Modelos en tiempo continuo: Las variables de estado cambian suavemente en pequeños intervalos de tiempo Modelos de cultivos Ecuaciones diferenciales Modelos en tiempo discreto: Las variables de estado toman valores sobre intervalos de tiempo dados por valores enteros. Modelos de predicción de nacimiento y mortalidad de insectos Ecuaciones en diferencias 1. Estructura de un sistema Perturbaciones Entrada (Ambiente): Temperatura Humedad Relativa Viento… Invernadero Estanque Establo Decisión Salida: Producto ($) Unidad II Modelo simple: Temperatura Aplicamos la ley de variación de temperatura de un objeto (ya sea calentamiento o enfriamiento). Dicha ley establece que la variación de temperatura de un cuerpo es proporcional a la diferencia de su temperatura y la del medio que lo rodea (esto es, la temperatura ambiente Ta se considera como constante): 𝑑𝑇 𝑑𝑡 = 𝐾(𝑇 − 𝑇𝑎) Modelo simple: Temperatura Un líquido dentro de un recipiente está a una temperatura inicial de 300 °F, luego, en el tiempo t = 0 el recipiente es llevado a una habitación donde la temperatura ambiente es de 70 °F y tres minutos después, la temperatura del líquido es de 200 °F. A partir de esto habrá que obtener: a. Una ecuación diferencial que indique el comportamiento del sistema. b. La representación gráfica de la variación de la temperatura del líquido con respecto al tiempo Modelo simple: Temperatura 𝑑𝑇 𝑑𝑡 = 𝐾(𝑇 − 70), para T(𝑡 =0) = 300 y T(𝑡 =3) = 200 La solución a la ecuación es 𝑇 𝑡 = 𝐶𝑒 −𝑘𝑡 = 𝑇𝑎 Modelo simple: Temperatura La constante C = 230 se obtiene de la primera de las condiciones iniciales, mientras que el número k = −0.19018 (constante del sistema) se evalúa utilizando la segunda condición inicial. 𝑑𝑇 4. 𝑑𝑇 5. ln(𝑇 − 70) = 𝐾𝑡 + 𝐶 1. 𝑑𝑡 = 𝐾 𝑇 − 𝑇𝑎 2. 𝑑𝑡 = 𝐾 𝑇 − 70 𝑑𝑇 3. 𝑇−70 = 𝐾𝑑𝑡 𝑑𝑇 𝑇 −70 = 𝐾 𝑑𝑡 6. 𝑒 ln(𝑇−70) = 𝑒 𝑘𝑡 + 𝐶 Modelo simple: Temperatura 7. 𝑇 − 70 = 𝑒 𝑘𝑡+𝐶 Para la condición inicial del inciso a 8. 𝑇(𝑡) = 𝐶𝑒 𝑘𝑡 + 70 1. 𝑇 0 = 300 2. 𝑇 0 = 𝐶𝑒 𝑘𝑡 + 70 = 300 3. 𝑇 0 = 𝐶𝑒𝑘(0) + 70 = 300 4. 𝑇 0 = 𝐶 + 70 = 300 5. 𝐶 = 300 − 70 = 230 Modelo simple: Temperatura Para la condición T(3) = 200 • La ecuación final: 1. 𝑇 3 = 230𝑒 𝑘(3) + 70 = 200 200 −70 230 13 ln 𝑒 3𝑘 = ln 23 2. 𝑒 3𝑘 = = 13 23 3. 4. 3𝑘 = −0.57 5. 𝑘 = −0.57 3 = −0.19018 𝑇 𝑡 = 230𝑒 −0.19018∗𝑡 + 70 Modelo simple: Temperatura Respuesta para el inciso b) Modelos matemáticos de sistemas biológicos Dinámica camarón – algas En este sistema, donde x x y = número de algas, y = número de camarones respectivamente, a = tasa de crecimiento de la algas, c = tasa de mortalidad del camarón y b y d = tasas que caracterizan el efecto de las interacciones algas-camarón sobre la muerte de las algas y el crecimiento del camarón, respectivamente. La multiplicación los términos (es decir, los que implican xy) son lo que hacen tales ecuaciones no lineales. Modelos matemáticos de sistemas biológicos 𝑑𝑥 𝑑𝑡 𝑑𝑦 𝑑𝑡 = 𝑎𝑥 − 𝑏𝑥𝑦 = − 𝑐𝑦 + 𝑑𝑥𝑦 Se requiere simular la dinámica del comportamiento presa-depredador, suponiendo los siguientes parámetros: a = 1.2, b = 0.6, c = 0.8 y d = 0.3. Suponer las condiciones iniciales de x = 2 e y = 1 e integrar desde t = 0 a 30. 3. Simulación – Modelo biológico 3. Simulación – Modelo biológico 1.2x - 0.6xy x 1.2x 0.6xy 0.3xy xy 0.8y - 0.8y + 0.3xy x y xy x y y y 2. Sistema dinámico Modelar el siguiente sistema dinámico (recipiente con fertilizante) i(t) h V O(t) A 2. Sistema dinámico Tipo de modelo: Determinístico (No hay probabilidad) Mecanicista (Comprensión del fenómeno) Dinámico (Varia en el tiempo) Tiempo continuo (Mas de dos valores) Principios de ingeniería Análisis: es el proceso de encontrar la solución (salida) de un proceso de sistema especifico. Por ejemplo: Alimento balanceado (entrada) en un animal sano (sistema) puede resultar en ganancia de peso (salida). Se puede hacer un análisis para determinar la cantidad de ganancia de peso por cada gramo de alimento suministrado. En el análisis, la cantidad de alimento suministrado deberá ser variado y observar la ganancia de peso, este análisis puede ser representado de la siguiente manera: Entrada Proceso del sistema ¿Salida? Principios de ingeniería Diseño: es la especificación del proceso del sistema de tal manera coincidir una entrada especifica con una salida deseada. Ejemplo: Dos animales alimentados con la misma cantidad ganaran diferentes biomasa debido a su estructura del organismo. Para compensar esta diferencia, se tendrá que agregar otro animal para poder alcanzar la biomasa deseada. El diagrama seria el siguiente: Entrada ¿Proceso del sistema? Salida Principios de ingeniería Control: es la especificación de la entrada para alcanzar el objetivo de salida deseado dando una descripción del proceso del sistema. Ejemplo: se ajustara la tasa de alimentación para alcanzar la talla deseada. La representación esquemática es la siguiente: ¿Entrada? Proceso del sistema Salida Principios de ingeniería La conservación de la materia es el principio que la materia no se puede crear ni destruir durante un cambio físico o químico. Dentro de un sistema cerrado, la tasa de cambio en la cual una sustancia incrementa o decrementa, es debido a la tasa de cambio la cual la sustancia entra del exterior menos la tasa de cambio que sale. Sin embargo, la materia no puede ser destruida ni creada, solo puede ser transformada, transportada o almacenada. 2. Sistema dinámico Principios de ingeniería Enfoque de análisis de sistema ¿qué tenemos en un recipiente con fertilizante? 2. Sistema dinámico Por balance de materia La salida es igual a lo que entra menos lo que es almacenado en el recipiente. 𝑖 𝑡 − 𝑉(𝑡) = 𝑜(𝑡) 𝑖 𝑡 − 𝑜(𝑡) = 𝑉(𝑡) Volumen = Entrada – Salida 2. Sistema dinámico El volumen estará variando por lo que: 𝑑𝑣 = 𝑖 𝑡 − 𝑜(𝑡) 𝑑𝑡 i(t) h V O(t) A 2. Sistema dinámico Fenómeno de estudio: Teorema de Torricelli Estudia el flujo de un liquido contenido en un recipiente, a través de un orificio, bajo la acción de la gravedad. 𝑉𝑡 = 𝑉𝑜2 2 𝑥 𝑔 𝑥 (ℎ + ) 2𝑥𝑔 𝑉𝑡 = 2𝑥𝑔𝑥ℎ 2. Sistema dinámico Resolviendo la ecuación 𝑑𝑣 = 𝑖 𝑡 − 𝑜(𝑡) 𝑑𝑡 Salida del sistema 𝑂 𝑡 = 𝑉𝑡 = 2𝑥𝑔𝑥ℎ Por lo tanto 𝑑𝑣 =𝑖 𝑡 − 2𝑥𝑔𝑥ℎ 𝑑𝑡 2. Sistema dinámico Integramos 𝑑𝑣 =𝑖 𝑡 − 2𝑥𝑔𝑥ℎ 𝑑𝑡 Salida del sistema 𝑉 𝑚3 = 𝑎𝑟𝑒𝑎 𝑚2 Por lo tanto 𝑉𝑡 = 𝑉 2𝑥𝑔𝑥 𝐴 𝑉𝑜𝑙𝑢𝑚𝑒𝑛 (𝑚3) 𝑥 𝑎𝑙𝑡𝑢𝑟𝑎 𝑚 ; Altura = 𝐴𝑟𝑒𝑎 (𝑚2) 2. Sistema dinámico Integramos 𝑑𝑣 =𝑖 𝑡 − 𝑑𝑡 𝑉 2𝑥𝑔𝑥 𝐴 i(t) h 𝑑𝑣 𝑑𝑡 V= A 𝑂 𝑡 = 2𝑥𝑔𝑥 𝑉 𝐴 2. Sistema dinámico ¿Y si agregamos una válvula en la salida? 𝑑𝑣 =𝑖 𝑡 − 𝑐 ∗ 𝑑𝑡 𝑉 2𝑥𝑔𝑥 𝐴 u(1)-C*sqrt((2*g*u(2))/A) i(t) h 𝑑𝑣 𝑑𝑡 V= A 𝑂 𝑡 =𝑐 ∗ 2𝑥𝑔𝑥 𝑉 𝐴 2. Sistema dinámico con interacción Modelar la dinámica de un sistema conformado por dos recipientes con líquidos. i(t) h1 V1 O1(t) A1 h2 V2 A2 O2(t) 2. Sistema dinámico con interacción Dibujar el comportamiento del sistema descrito anteriormente. Determinar el sistema de ecuaciones del sistema descrito anteriormente. 2. Sistema dinámico con interacción Modelar la dinámica de un sistema conformado por dos recipientes con líquidos. 𝑑𝑣1 = 𝑖 𝑡 − 𝑜1(𝑡) 𝑑𝑡 𝑑𝑣2 = 𝑜1 𝑡 − 𝑜2(𝑡) 𝑑𝑡 i(t) h1 V1 O1(t) A1 h2 V2 A2 O2(t) 2. Sistema dinámico con interacción Modelar la dinámica de un sistema conformado por dos recipientes con líquidos. 𝑑𝑣1 =𝑖 𝑡 − 𝑐 ∗ 𝑑𝑡 i(t) h1 𝑑𝑣2 =𝑐 ∗ 𝑑𝑡 V1 2𝑥𝑔𝑥 O1(t) A1 h2 V2 A2 O2(t) 𝑉1 −𝑐∗ 𝐴1 𝑉1 2𝑥𝑔𝑥 𝐴1 2𝑥𝑔𝑥 𝑉2 𝐴2 2. Sistema dinámico con interacción Modelar la dinámica de un sistema conformado por tres recipientes con líquidos. i(t) h1 O1(t) O3(t) V2 A2 V1 A1 O2(t) h3 V3 A3 O4(t) 2. Sistema dinámico con interacción Modelar la dinámica de un sistema conformado por tres recipientes con líquidos. i(t) 𝑑𝑣2 = 𝑂1 𝑡 − 𝑂3(𝑡) 𝑑𝑡 𝑑𝑣3 = 𝑂2 𝑡 − 𝑂4(𝑡) 𝑑𝑡 h1 O1(t) O3(t) V2 A4 𝑑𝑣1 = 𝑖 𝑡 − 𝑂1 𝑡 − 𝑂2(𝑡) 𝑑𝑡 𝑑𝑣1 = 𝑖 𝑡 − 𝑂1 𝑡 + 𝑂2(𝑡) 𝑑𝑡 V1 A1 O2(t) h3 V3 A3 O4(t) 2. Sistema dinámico con interacción El sistema de ecuaciones quedaría de la siguiente manera: 𝑑𝑣1 = 𝑖 𝑡 − 𝐶1 ∗ 𝑑𝑡 2𝑥𝑔𝑥 𝑉1 + 𝐶2 ∗ 𝐴1 𝑑𝑣2 = 𝐶1 ∗ 𝑑𝑡 2𝑥𝑔𝑥 𝑉1 − 𝐶3 ∗ 𝐴1 𝑑𝑣3 = 𝐶2 ∗ 𝑑𝑡 𝑉1 2𝑥𝑔𝑥 − 𝐶4 ∗ 𝐴1 2𝑥𝑔𝑥 2𝑥𝑔𝑥 𝑉2 𝐴2 𝑉3 2𝑥𝑔𝑥 𝐴3 𝑉1 𝐴1 Simulación Scilab Bloques Xcos Concentración Se tienen tres tanques de 1000 litros de capacidad cada uno, perfectamente agitados. Los tres recipientes están completamente llenos con una solución cuya concentración es de 30 g/l. A partir de cierto momento se alimenta al primer tanque con una solución que contiene 50 g/l con un gasto de 300 l/min (el cual fluye igual al resto de los tanques y hacia afuera del sistema). Calcular al concentración en cada tanque después de 10 minutos de haber empezado a agregar la solución al primero. Concentración Diagrama 300 l/min 50 g/l C1(0) = 30 g/l V1= 1000 l C2(0) = 30 g/l V2= 1000 l C3(0) = 30 g/l V3= 1000 l Concentración ¿cómo quedarían las ecuaciones? Escribir el sistema de ecuaciones Modelación concentración Balance para el primer tanque: Variación del soluto = Entradas−Salidas 𝑉1 𝑑𝐶1 = 300 50 − 300𝐶1 𝑑𝑡 𝑑𝐶1 = 15 − 0.3𝐶1 𝑦 𝐶1 0 = 30 𝑑𝑡 Modelación concentración Balance para el segundo tanque: 𝑑𝐶2 = 300𝐶1 − 300𝐶2 𝑑𝑡 𝑑𝐶2 = 0.3 𝐶1 − 𝐶2 𝑑𝑡 𝑦 𝐶2 0 = 30 Modelación concentración Balance para el tercer tanque: 𝑑𝐶3 = 300𝐶2 − 300𝐶3 𝑑𝑡 𝑑𝐶3 = 0.3 𝐶2 − 𝐶3 𝑑𝑡 𝑦 𝐶3 0 = 30 Concentración ¿cómo quedarían la simulación? Dibujar el comportamiento Simulación concentración Simulación concentración Respuesta Concentración Diagrama 150 l/min 50 g/l 150 l/min 50 g/l C1(0) = 30 g/l V1= 1000 l C2(0) = 30 g/l V2= 1000 l C3(0) = 30 g/l V3= 1000 l Concentración ¿cómo quedarían las ecuaciones? Escribir el sistema de ecuaciones Modelación concentración Balance para el primer tanque: Variación del soluto = Entradas−Salidas 𝑉1 𝑑𝐶1 = 150 50 − 150𝐶1 𝑑𝑡 1000 ∗ 𝑑𝐶1 = 7500 − 150𝐶1 𝑑𝑡 𝑑𝐶1 = 7.5 − 0.15𝐶1 𝑦 𝐶1 0 = 30 𝑑𝑡 Modelación concentración Balance para el segundo tanque: Variación del soluto = Entradas−Salidas 𝑉2 𝑑𝐶2 = 150 50 − 150𝐶2 𝑑𝑡 1000 ∗ 𝑑𝐶2 = 7500 − 150𝐶2 𝑑𝑡 𝑑𝐶2 = 7.5 − 0.15𝐶2 𝑦 𝐶2 0 = 30 𝑑𝑡 Modelación concentración Balance para el tercer tanque: Variación del soluto = Entradas−Salidas 𝑉3 𝑑𝐶3 = 150𝐶1 + 150𝐶2 − 150𝐶3 𝑑𝑡 1000 ∗ 𝑑𝐶3 = 150𝐶1 + 150𝐶2 − 150𝐶3 𝑑𝑡 𝑑𝐶3 = 0.15𝐶1 + 0.15𝐶2 − 0.15𝐶3 𝑦 𝐶3 0 = 30 𝑑𝑡 Simulación Simulación Caudal y Concentración Simular el caudal y concentración del siguiente diagrama 5 l/min 5 g/l O3 O1 C1(0) = 0 g/l V1= 0 l O2 C2(0) = 0 g/l V2= 0 l C3(0) = 0 g/l V3= 0 l Caudal y Concentración ¿cómo quedarían las ecuaciones? Escribir el sistema de ecuaciones Caudal y Concentración Sistema de ecuaciones Volumen 𝑑𝑣1 = 𝑖 𝑡 − 𝑂1 𝑡 𝑑𝑡 𝑑𝑣3 = 𝑂2 𝑡 − 𝑂3(𝑡) 𝑑𝑡 𝑑𝑣2 = 𝑂1 𝑡 − 𝑂2(𝑡) 𝑑𝑡 Concentración 𝑉1 𝑑𝐶1 = 5 5 − 𝑂1𝐶1 𝑑𝑡 𝑑𝐶2 𝑉2 = 𝑂1𝐶1 − 𝑂2𝐶2 𝑑𝑡 𝑉3 𝑑𝐶3 = 𝑂2𝐶2 − 𝑂3𝐶3 𝑑𝑡 Unidad III Análisis de sistemas Sistemas de primer orden Función de transferencia Sistemas de segundo orden Sistemas de primer orden La variable dependiente y(t) depende de la primer derivada y su función forzada x(t) Cuando la variable independiente t es t0, y es y0 dy a t y t Kx t dt y t 0 y0 Dado que el coeficiente de y es (+1): a(t) debe tener dimensiones de t K tiene dimensiones de y/x Sistemas de primer orden Podemos resolver una ODE definiendo la integral dt p t exp a t Note que p(t) es adimensional La solución es t p t0 y t0 p t x t K y t dt p t p t t0 a t Sistemas de primer orden t p t0 y t0 p t x t K y t dt p t p t t0 a t Tenga en cuenta que la solución tiene contribuciones de: Condición inicial y(t0) Función forzada K x(t) En el lenguaje de dinámica de sistemas podemos decir que Y(t) es la respuesta del sistema Esta es una respuesta a las perturbaciones de entrada K x(t) y(t0) Sistemas de primer orden La variable independiente t representa el tiempo Para muchas aplicaciones de control de procesos, a(t) será una constante positiva La llamamos constante de tiempo, t por lo tanto, tenemos una ODE lineal t dy y t Kx t dt y t 0 y0 Sistemas de primer orden El factor de integración es: dt t p t exp exp t t Y la solución se convierte en : y t y0 e t t0 t K t e t t t e t0 t t x t dt Sistemas de primer orden: Tanque con agitación Q, Cai Q, Cao Volumen Sistemas de primer orden: Tanque con agitación Q > caudal Cai > Concentración Es un tanque en “Overflow” El proceso es la agitación (es homogeneo) Por balance de masas: 𝑑 𝑃𝑄𝑒 − 𝑃𝑄𝑠 = 𝑃𝑉 𝑑𝑡 Sistemas de primer orden: Tanque con agitación 𝑃(𝑄𝑒 − 𝑄𝑠) = 𝑃 𝑑 𝑉 𝑑𝑡 𝑃(𝑄𝑒 − 𝑄𝑠) = 𝑃 𝑑 𝑉 𝑑𝑡 El volumen es constante porque siempre esta lleno 𝑄𝑒 − 𝑄𝑠 = 𝑑 𝑉 𝑑𝑡 Tanque con agitación La derivada de un constante es cero Si el volumen es constante: 0 𝑑 𝑄𝑒 − 𝑄𝑠 = 𝑉 𝑑𝑡 𝑄𝑒 = 𝑄𝑠 ¿Qué significa esto? Tanque con agitación Considerando la concentración 𝑄𝐶𝑎𝑖 𝑚3 𝑠 𝑘𝑔 𝐾𝑔 = 𝑚3 𝑠 ¿Qué es lo que esta entrado al sistema? Tanque con agitación La ecuación completa 𝑄𝐶𝑎𝑖 − 𝑄𝐶𝑎𝑜 = 𝑑 𝑉? 𝑑𝑡 ¿Multiplicado porque? 𝑄𝐶𝑎𝑖 − 𝑄𝐶𝑎𝑜 = 𝑑 𝑉𝐶𝑎 𝑑𝑡 Tanque con agitación 𝑑 𝑄𝐶𝑎𝑖 − 𝑄𝐶𝑎𝑜 = 𝑉𝐶𝑎 𝑑𝑡 𝑑 𝑉𝐶𝑎 = 𝑄(𝐶𝑎𝑖 − 𝐶𝑎𝑜) 𝑑𝑡 Si Q es constante, entonces ________ Tanque con agitación Forma estándar (dividimos Q) 𝑑 𝑉𝐶𝑎 = 𝑄(𝐶𝑎𝑖 − 𝐶𝑎𝑜) 𝑑𝑡 𝑉 𝑑(𝐶𝑎𝑜) = 𝐶𝑎𝑖 − 𝐶𝑎𝑜 𝑄 𝑑𝑡 𝑉 𝑑(𝐶𝑎𝑜) + 𝐶𝑎𝑜 = 𝐶𝑎𝑖 𝑄 𝑑𝑡 Función forzante Variable independiente Tanque con agitación Si 𝜏= 𝑉 𝑄 𝐾=1 𝑑(𝐶𝑎𝑜) 𝜏 + 𝐶𝑎𝑜 = 𝐶𝑎𝑖 𝑑𝑡 Queremos una referencia Cao,r Tanque con agitación Cai y Cao nos dice el estado del sistema En estado estacionario (referencia): 0 𝜏 𝑑(𝐶𝑎𝑜) + 𝐶𝑎𝑜 = 𝐶𝑎𝑖 𝑑𝑡 𝐶𝑎𝑜, 𝑟 = 𝐶𝑎𝑖 Tanque con agitación La solución de forma general 𝐶𝑎𝑜 𝑡 = 𝐶𝑎𝑟 ∗ (𝑡−𝑡𝑟) − 𝜏 𝑒 𝐾 −𝑡 + 𝑒𝑡 𝜏 𝑡 𝑡0 𝑡 𝜏 𝑒 𝐶𝑎𝑖 𝑡 𝑑𝑡 Funciones de transferencia La función de transferencia de un sistema descrito mediante una ecuación diferencial lineal e invariante en el tiempo se define como el cociente entre la transformada de Laplace de la salida (función de respuesta) y la transformada de Laplace de la entrada (función de excitación) bajo la suposición de que todas las condiciones iniciales son cero. L c(t ) Función de transferencia L r (t ) c(t ) salida r (t ) entrada con condiciones iniciales cero Funciones de transferencia ¿Para que sirven? En ingeniería, a menudo se usan las funciones de transferencia para caracterizar las relaciones de entradasalida de componentes o de sistemas que se describen mediante ecuaciones diferenciales lineales invariantes en el tiempo. Funciones de transferencia La aplicación del concepto de función de transferencia está limitada a los sistemas descritos mediante ecuaciones diferenciales lineales invariantes en el tiempo; sin embargo, el enfoque de la función de transferencia se usa extensamente en el análisis y diseño de dichos sistemas. A continuación se presentan algunos comentarios importantes relacionados con la función de transferencia. Función de transferencia G(s) Funcion de transferenciaTransformada Laplace Un ecuación diferencial de primer orden (blending tank) 𝜏 𝑑(𝐶𝑎𝑜) + 𝐶𝑎𝑜 = 𝐶𝑎𝑖 𝑑𝑡 Aplicando Laplace t s y s y s K x s t s 1 y s K x s K y s x s t s 1 Función de transferencia 𝑇 𝑡 = 230𝑒 −0.19018∗𝑡 + 70 𝑑𝐶 𝑑𝑡 + 𝐴𝑜 𝑡 = 𝐵𝑜 𝐶 𝑡 = 𝐵𝑜 ∗ 𝑒 −𝐴0∗𝑡 𝜏= 1 𝐴𝑜 Función de transferencia: Sistemas de primer orden 𝑇 𝑡 = 230𝑒 −0.19018∗𝑡 + 70 𝜏= 1 ; 𝐴𝑜 Ao = 0.19018 𝜏 = 5.25 𝑌(𝑆) 𝑋(𝑆) = 230 5.25 𝑆+1 Funciones de transferencia La función de transferencia de un sistema es un modelo matemático porque es un método operacional para expresar la ecuación diferencial que relaciona la variable de salida con la variable de entrada. La función de transferencia es una propiedad de un sistema, independiente de la magnitud y naturaleza de la entrada o función de excitación. La función de transferencia incluye las unidades necesarias para relacionar la entrada con la salida; sin embargo, no proporciona información acerca de la estructura física del sistema. (Las funciones de transferencia de muchos sistemas físicamente diferentes pueden ser idénticas.) Funciones de transferencia Si se conoce la función de transferencia de un sistema, se estudia la salida o respuesta para varias formas de entrada, con la intención de comprender la naturaleza del sistema. Si se desconoce la función de transferencia de un sistema, puede establecerse experimentalmente introduciendo entradas conocidas y estudiando la salida del sistema. Una vez establecida una función de transferencia, proporciona una descripción completa de las características dinámicas del sistema, a diferencia de su descripción física. La constate del tiempo t respuesta al escalón t c(t) 0 0 AK 0.981684 AK 1𝜏 0.632120 0.632120 AK 2𝜏 0.864664 3𝜏 0.950212 4𝜏 0.981684 t 4t t Comentarios: La constante de tiempo (𝜏) es igual al tiempo que tarda la salida en alcanza un 63.212% del valor final. Matemáticamente la salida alcanza su valor final en un tiempo infinito, pero en el sistema real lo hace en tiempo finito. Para fines prácticos se considera que la salida alcanza el estado estable en cierto porcentaje del valor final. Se usan dos criterios: el del 98%(4𝜏) y el del 95% (3𝜏) Función de transferencia: Sistemas de primer orden Se abre la compuerta de riego para evitar una helada en un cultivo de maíz, se aplican 1500 litros de agua para cubrir una superficie de 400m2, el tiempo de aplicación es de 180 segundos para alcanzar el 98% de espejo de agua (superficie). Determine la función de transferencia. Litros de agua Entrada Maíz Superficie Salida Función de transferencia: Sistemas de primer orden Se define la ganancia en estado estable: Desarrollo: 𝑘= 𝑆𝑎𝑙𝑖𝑑𝑎 𝐸𝑛𝑡𝑟𝑎𝑑𝑎 = 𝑒𝑠𝑝𝑒𝑗𝑜 𝑑𝑒 𝑎𝑔𝑢𝑎 𝑙𝑖𝑡𝑟𝑜𝑠 𝑑𝑒 𝑎𝑔𝑢𝑎 = 400 𝑚2 1500 𝑙𝑡 = 0.266 Función de transferencia: Sistemas de primer orden Se determina la constante de tiempo: Usando el criterio del 2% de error, se determina el tiempo que tarda la salida en alcanzar un 98% de su valor, se divide entre 4 y se obtiene la constante de tiempo. 4𝜏 = 0.98 4𝜏 = 180 𝜏= 180 4 = 45 𝑠𝑒𝑔𝑢𝑛𝑑𝑜𝑠 Función de transferencia: Sistemas de primer orden Se sustituye en la forma 𝐺 𝑠 = 𝐾 𝜏 𝑆+1 La función de transferencia que relaciona los litros con el espejo de agua. 𝐺 𝑠 = 𝐺 𝑠 = 0.266 45 𝑆+1 0.005926 𝑆 + 0.0222 Función de transferencia: Sistemas de primer orden 0.35 0.3 0.25 K 0.2 0.15 0.1 0.05 0 0 20 40 60 80 100 120 Tiempo (Segundos) 140 160 180 200 Función de transferencia Concentración y velocidad de entrada de cierta sustancia Solución a cierta concentración inicial Agitador Concentración y velocidad de salida de la mezcla Volumen Función de transferencia Sea q(t) la concentración de cierta sustancia en cualquier momento, por lo que la velocidad de cambio de concentración q(t) corresponde a: 𝑑𝑞 𝑅𝑎𝑧𝑜𝑛 𝑑𝑒 𝑒𝑛𝑡𝑟𝑎𝑑𝑎 𝑅𝑎𝑧𝑜𝑛 𝑑𝑒 𝑠𝑎𝑙𝑖𝑑𝑎 = − = 𝑅1 − 𝑅2 𝑑𝑒 𝑙𝑎 𝑠𝑢𝑠𝑡𝑎𝑛𝑐𝑖𝑎 𝑑𝑒 𝑙𝑎 𝑠𝑢𝑠𝑡𝑎𝑛𝑐𝑖𝑎 𝑑𝑡 donde la razón de entrada R1 es el producto de la concentración y la velocidad de entrada de la solución, mientras que la razón de salida R2 es el producto de la concentración y la velocidad con la que sale la solución mezclada. Función de transferencia Sea un tanque lleno con ocho litros de agua salada en el cual están disueltos dos kg de sal. Una solución de salmuera (agua salada) con tres kg de sal por litro entra al tanque a una velocidad de 4 l/min, mientras la mezcla bien agitada sale a la misma velocidad con la que entra. Obtenga una expresión para la variación de concentración con respecto al tiempo. Función de transferencia R1 = (Concentración de entrada) × (Velocidad de entrada): 𝑅1 = 3 𝑘𝑔 𝑙 𝑘𝑔 ∗4 = 12 𝑙 𝑚𝑖𝑛 𝑚𝑖𝑛 R2 = (Concentración de salida) × (Velocidad de salida): 𝑅2 = 𝑞 𝑘𝑔 𝑙 𝑞 𝑘𝑔 ∗4 = 8 𝑙 𝑚𝑖𝑛 2 𝑚𝑖𝑛 Función de transferencia 𝑑𝑞 𝑑𝑡 𝑑𝑞 𝑑𝑡 = 𝑅1 − 𝑅2 = 12 − + 𝑞 2 = 12 𝑞 2 𝑐𝑜𝑛 𝑞 0 = 2 Aplicamos transformada laplace para obtener función de transferencia (SQ(S) – Q(0)) + 0.5Q(S) = 12/S (SQ(S) – 2) + 0.5Q(S) = 12/S Función de transferencia (SQ(S) – 2) + 0.5Q(S) = 12/S 𝑆𝑄 𝑆 + 0.5𝑄 𝑆 = 𝑄 𝑆 (𝑆 + 0.5) = 𝑄 𝑆 (𝑆 + 0.5) = 𝑄 𝑆 = 12 𝑠 (𝑠+0.5) + 12 𝑠 12 𝑠 12 𝑠 +2 +2 +2 2 (𝑠+0.5) Función de transferencia 𝑄 𝑆 = 12 𝑠 (𝑠+0.5) 𝑄 𝑆 = 12 𝑆(𝑆+0.5) 𝑄 𝑆 = 12 𝑆(𝑆+0.5) 12 𝑠 + 2 (𝑠+0.5) + 𝑠 (𝑠+0.5) + 𝑠 (𝑠+0.5) + 2 = 2𝑆 + 12 Función de transferencia 𝑄 𝑆 = 2𝑆+ 12 𝑆(𝑆+0.5) ¿Cuál es la concentración? 8litros x 3kg/litros = 24 kg Función de transferencia >> syms s t >> Y=(2*s+12)/(s^2+0.5*s); y=ilaplace(Y) y = 24−22*exp(−1/2*t) >> t=[0:0.01:15]; q=24−22.*exp(−0.5*t); >> plot(t,q), grid >> title(“variación de concentración q(t)”) >> xlabel(“t, tiempo (minutos)”), ylabel(“q, concentración en Kg”) Función de transferencia variacion de concentracion q(t) 25 q, concentración en Kg 20 15 10 5 0 0 5 10 t, tiempo (minutos) 15