Ejemplo Integración de un Robot
en una celda de manufactura
M.C. José Gpe. Corona
1
Sep-Dic 2021
Objetivos
2
Establecer la secuencia de pasos necesaria
para llevar a cabo la integración de una celda
de manufactura
Identificar los componentes de una celda y las
señales de interacción entre los mismos.
Definir las trayectorias y tareas que debe
realizar un robot dentro de una celda de
manufactura.
Sep-Dic 2021
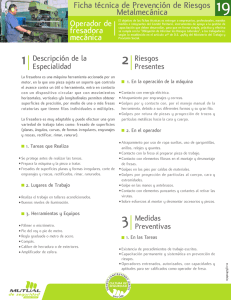
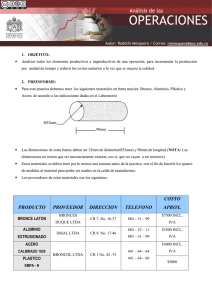
Proceso de Integración
de una celda de manufactura
IDENTIFICACIÓN
DE SUBSISTEMAS
DEFINICIÓN DE
TAREAS
3
IDENTIFICACIÓN
DE SEÑALES
SINCRONIZACIÓN
DE COMPONENTES
IDENTIFICACIÓN
DE PUNTOS,
TRAYECTORIAS
Y CICLOS
PROGRAMACIÓN
DE TAREAS
Sep-Dic 2021
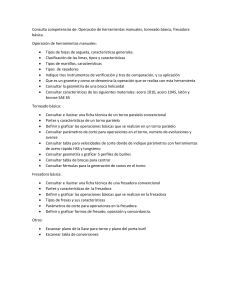
Ejemplo de Integración de un robot con una fresadora
Celda con robot móvil y fresadora
llegada
4
Salida
Fresadora
Sep-Dic 2021
Definición de subsistemas o componentes
de la celda
Fresadora
Controlador
Del
Robot
Banda
Riel
5
IDENTIFICACIÓN
DE SUBSISTEMAS
Sep-Dic 2021
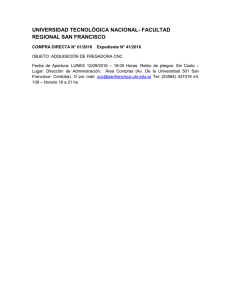
Secuencia de Movimientos y Actividades
Celda con robot móvil y fresadora
llegada
1. Recoger Pieza
De Posición de llegada
6
Fresadora
Sep-Dic 2021
Secuencia de Movimientos y Actividades
Celda con robot móvil y fresadora
Llegada
Salida
2. Colocar Pieza
en Fresadora
7
Fresadora
Sep-Dic 2021
Secuencia de Movimientos y Actividades
Celda con robot móvil y fresadora
Llegada
Salida
3. Esperar a que
termine maquinado
8
Fresadora
Sep-Dic 2021
Secuencia de Movimientos y Actividades
Celda con robot móvil y fresadora
Llegada
Salida
4. Ya termino maquinado
9
Fresadora
Sep-Dic 2021
Secuencia de Movimientos y Actividades
Celda con robot móvil y fresadora
Llegada
Salida
5. Recoger Pieza
de la fresadora
10
Fresadora
Sep-Dic 2021
Secuencia de Movimientos y Actividades
Celda con robot móvil y fresadora
Llegada
Salida
6. Sacar Pieza
de la fresadora
11
Fresadora
Sep-Dic 2021
Secuencia de Movimientos y Actividades
Celda con robot móvil y fresadora
Llegada
Salida
7. LLevar Pieza
a Posición de Salida
12
Fresadora
Sep-Dic 2021
Secuencia de Movimientos y Actividades
Celda con robot móvil y fresadora
Llegada
Salida
8. Colocar en
posición de Salida
13
Fresadora
Sep-Dic 2021
Secuencia de Movimientos y Actividades
Celda con robot móvil y fresadora
llegada
Salida
9. Regresar a
Posición Inicial
14
Fresadora
Sep-Dic 2021
1. Definición de Señales de Entrada al robot
3
llegada
Salida
2
4
1.
2.
3.
4.
5.
Fresa Lista
Fresa Termina Maquinado
Artículo en Estación de Llegada
Riel en Posición Carga Fresa
Riel en Posición Entrega Banda
5
1
Fresadora
15
IDENTIFICACIÓN
DE SEÑALES
Ene-May 2013
1. Definición de Señales de Entrada al robot
Banda Llegada y Salida
3
1.
2.
3.
4.
5.
2
Controlador
Del Robot
Fresadora
1
16
IDENTIFICACIÓN
DE SEÑALES
4
5
Fresa Lista
Fresa Termina Maquinado
Artículo en Estación de Llegada
Riel en Posición Carga Fresa
Riel en Posición Entrega Banda
Riel
Sep-Dic 2021
1. Definición de Señales de Salida del robot
Salida
llegada
3
1.
2.
3.
4.
5.
2
4
Termina Carga de Pieza
Termina Descarga de Pieza
Termina Entrega de Pieza
Mueve Riel a Carga Fresa
Mueve Riel a Entrega Banda
5
1
Fresadora
17
IDENTIFICACIÓN
DE SEÑALES
Sep-Dic 2021
1. Definición de Señales de Salida del robot
Banda Llegada y Salida
3
1
Fresadora
1.
2.
3.
4.
5.
Controlador
Del Robot
2
4
5
Termina Carga de Pieza
Termina Descarga de Pieza
Termina Entrega de Pieza
Mueve Riel a Carga Fresa
Mueve Riel a Entrega Banda
Riel
18
IDENTIFICACIÓN
DE SEÑALES
Sep-Dic 2021
ASIGNACION DE ENTRADAS Y SALIDAS
YASNAC MRC
Sensores
+24 VU
2024
2025
2026
Entradas
2027
1-B1
1-A1
1-B2
1-A2
1-B3
1-A3
INTRF3 ENTRANCE
INTRF4 ENTRANCE
1-B4
1-A4
IN
IN
IN
IN
2034
2035
1-B5
1-A5
IN 5
IN 6
2036
2037
1-B6
1-A6
IN 7
2030
2031
2032
2033
1-B7
1-A7
3024
3025
3026
3027
1-B10
1-A10
WORK INSTRUCTION
1-B11
1-A11
OUT COMMON
3032
1-B13
1-A13
1-B14
1-A14
3034
3035
1-B15
1-A15
3036
1-B16
1-A16
1-B17
1-A17
1-B18
1-A18
1-B19
1-A19
+24 VU
1-B20
0 VU
1-A20
IN
0 VU
OUT COMMON
1-B12
1-A12
3037
IN 8
0 VU
1-B8
1-A8
1-B9
1-A9
3030
3031
3033
1
2
3
4
IN
IN
IN
IN
IN
IN
IN
IN
IN
IN
IN
OUT COMMON
IN CUBE 3
IN CUBE 4
OUT
OUT
OUT
OUT
OUT COMMON
OUT 1
OUT 2
OUT 3
OUT 4
OUT
OUT
OUT
OUT
OUT COMMON
OUT COMMON
OUT 5
OUT
OUT 6
OUT 7
OUT
OUT 8
0 VU
0 VU
0 VU
OUT
OUT
0 VU
+24 VU
+24 VU
FG
+24 VU
JANCD - MIO 04 1CN I/O Allocation/Connection
19
IDENTIFICACIÓN
DE SEÑALES
2
Botones
1
4
3
Señales de otros
equipos
6
5
8
7
10
9
12
11
14
13
16
15
18
17
20
19
22
21
24
23
26
25
28
27
30
29
32
31
34
33
36
35
38
RLY
RLY
RLY
Bobinas
RLY
RLY
RLY
RLY
RLY
RLY
RLY
RLY
Relevadores
Focos o Luces
Señales hacia
otros equipos
37
40
39
Salidas
Sep-Dic 2021
2. Definición de Trayectorias
Salida
A
E
llegada
H
D
B
C
Fresadora
20
T1=H - A - B
T2=B – C - B
IDENTIFICACIÓN
DE PUNTOS,
TRAYECTORIAS
Y CICLOS
A.
B.
C.
D.
E.
Punto Recepción
Punto Intermedio (Espera)
Punto de Colocación Fresa
Punto Intermedio (Sacado)
Punto de Entrega
H.
Punto de Inicio
T3= B-C - D
T4= D-E - H
Sep-Dic 2021
Definición de Tareas
Fresadora
1. Inicializa Máquina
2. Comandos Preparatorios
3. Maquinado de la Pieza
4. Finalización de la Pieza
21
Robot
1. Referencia Robot (Posición Inicio)
2. Recoge artículo de Banda
3. Entrega artículo en Fresadora
4. Saca artículo de Fresadora
5. Entrega Artículo en Banda
6. Regresa Posición de Inicio
DEFINICIÓN DE
TAREAS
Ene-May 2013
Definición de Tareas
TAREA #, NOMBRE
EFECTOS
PRE-CONDICIONES
(ENTRADAS)
ACTIVIDADES
(SALIDAS)
SALIDAS
INTERMEDIAS
22
DEFINICIÓN DE
TAREAS
Sep-Dic 2021
Ejemplo de Integración de un robot
con una fresadora
Definición de condiciones y efectos para las tareas
a realizar en una Fresadora
No hay
No hay
F1
Inicialización
No hay
F2
Preparación
Pieza
Cargada
23
No hay
F4
Pieza
Descargada Finaliza
Fresa Lista
Pieza
F3
Maquinado Maquinada
Fresa
No Lista
Pieza No
Maquinada
DEFINICIÓN DE
TAREAS
Sep-Dic 2021
Ejemplo de Integración de un robot
con una fresadora
Definición de condiciones y efectos para las tareas a
realizar por el Robot
Mueve Riel
Pieza
R1
Carga Fresa
R4
Pieza
Descargada
Referencia
Maquinada Recoge Fresa Mueve Riel
Pieza en
Carga Banda
Banda
R2
Apaga Termina Carga
Recoger Pieza
Pieza
R5
Riel en
Apaga Mueve Riel
Pos. entrega Entrega Banda Descargada
Carga Fresa
Fresa
Lista
24
Termina
R3
Entrega Fresa Carga
Apaga Pieza Descargada
Apaga Mueve Riel Carga Banda
DEFINICIÓN DE
TAREAS
Sep-Dic 2021
Ejemplo de Integración de un robot
con una fresadora
Secuencia y Sincronización de tareas
entre Robot y Fresadora
Inicio
R1
Referencia
F1
Inicialización
R2
Recoger Pieza
F2
Preparación
R3
Entrega Fresa
<Fresadora lista>
<Pieza lista dentro de Fresadora>
F3
Maquinado
<Termino maquinado de Pieza>
R4
Recoge Fresa
R5
Entrega Banda
tiempo
25
<Termine de sacar la pieza>
F4
Finaliza
SINCRONIZACIÓN
DE COMPONENTES
Sep-Dic 2021
Ejemplo de Integración de un robot
con una fresadora
Programación de la Fresadora
Asuma que las señales de Fresadora Lista y Pieza Maquinada son
M43 y M44 respectivamente.
Tarea F1. Inicialización
01234
N10 G21
N20 G91 G28 Y0 Z0
N30 G00 X10
26
PROGRAMACIÓN
DE TAREAS
Sep-Dic 2021
Ejemplo de Integración de un robot
con una fresadora
Programación de la Fresadora
Tarea F2. Comandos de preparación
N40 M47
N50 M06 T10 F100 S1200
N60 M43
N70 G04 X20
27
Avisa al robot
que ya esta lista
Tiempo de
espera para
que el robot
coloque la pieza
PROGRAMACIÓN
DE TAREAS
Sep-Dic 2021
Ejemplo de Integración de un robot con una fresadora
Programación de la Fresadora
Tarea F3. Maquinado de la pieza
28
N80 M03
N90 G01 X4 Y5 Z4
N100 G01 X9
N110 G02 X12 Y7 R8
N120 G01 X15
N130 G01 Z-4
N140 G28 X5 Y2
PROGRAMACIÓN
DE TAREAS
Sep-Dic 2021
Ejemplo de Integración de un robot con una fresadora
Programación de la Fresadora
Tarea F4. Finalización
29
N150
N160
N170
N180
N190
N200
N210
M05
M41
M47
M44
G04 X15
M40
M30
Abre Prensa
Abre Puerta Avisa al robot
que ya esta maquinada
la pieza
Tiempo de
espera para
que el robot
saque la pieza
PROGRAMACIÓN
DE TAREAS
Sep-Dic 2021
Ejemplo de Integración de un robot con una fresadora
Programación del robot
Asuma las siguientes asignaciones:
Señal Entrada
1000 Fresa Lista
1001 Fresa Termina Maquinado
1002 Artículo en Estación de LLegada
1003 Riel en Posición Carga Fresa
1004 Riel en Posición Entrega Banda
30
Señal Salida
2000 Termina Carga de Pieza
2001 Termina Descarga de Pieza
2002 Termina Entrega de Pieza
2003 Mueve Riel a Carga Fresa
2004 Mueve Riel a Entrega Banda
PROGRAMACIÓN
DE TAREAS
Sep-Dic 2021
Ejemplo de Integración de un robot con una fresadora
Programación del robot
Tarea R1. Inicialización
1 LABEL 1
Apaga todas las
SIGNAL –2000,–2001,-2002,-2003,-2004 señales de salida
HOME
SPEED 50
Manda señal para mover el riel
SIGNAL 1003
A posición de entrega de pieza
31
PROGRAMACIÓN
DE TAREAS
Sep-Dic 2021
Ejemplo de Integración de un robot con una fresadora
Programación del robot
Tarea R2. Recoger pieza de la banda
WAIT 1003
SIGNAL -2003
WAIT 1002
MOVE PA
CLOSE GRIPPER
MOVE PB
32
Espera que el robot llegue y apaga la señal comandada
Espera que llegue artículo a la estación
Después se mueve para recoger la pieza
PROGRAMACIÓN
DE TAREAS
Sep-Dic 2021
Ejemplo de Integración de un robot con una fresadora
Programación del robot
Tarea R3. Colocar pieza en la fresadora
WAIT 1000
MOVE PC
OPEN GRIPPER
MOVE PB
SIGNAL 2000
33
Espera a que la fresadora este lista
Y luego procede a colocar la pieza y sacar el brazo
Avisa que ya coloco la pieza
PROGRAMACIÓN
DE TAREAS
Sep-Dic 2021
Ejemplo de Integración de un robot con una fresadora
Programación del robot
Tarea R4. Sacar pieza de la fresadora
WAIT 1001
SIGNAL -2000
MOVE PC
CLOSE GRIPPER
MOVE PD
SIGNAL 2001
SIGNAL 2004
34
Espera que la Fresadora haya terminado el ciclo
De maquinado y recoge la pieza
Avisa que ya recogió la pieza
Manda señal para mover el riel a la posición
De entrega en banda.
PROGRAMACIÓN
DE TAREAS
Sep-Dic 2021
Ejemplo de Integración de un robot con una fresadora
Programación del robot
Tarea R5. Entregar Pieza en la Banda
WAIT 1004
SIGNAL –2001, -2004
MOVE PE
OPEN GRIPPER
HOME
SIGNAL 2002
DELAY 10
SIGNAL –2002
GOTO 1
35
Espera a que llegue a la posición de entrega y
Apaga señales activadas anteriormente
Avisa que la pieza procesada ya esta en la banda
Espera un tiempo y apaga la señal
PROGRAMACIÓN
DE TAREAS
Sep-Dic 2021
RELACION DE LAS ENTRADAS/SALIDAS
EN ACTIVIDADES CON LA
PROGRAMACION DEL ROBOT
TAREAS
PROGRAMACION
2003
R1
-2000,-2001,-2002
-2003,-2004
1003
1002
WAIT 1003
SIGNAL -2003
WAIT 1002
MOVE PA
CLOSE GRIPPER
MOVE PB
R2
-2003
1000
1001
R3
R4
2000
WAIT 1000
MOVE PC
OPEN GRIPPER
MOVE PB
SIGNAL 2000
2001
WAIT 1001
SIGNAL -2000
MOVE PC
CLOSE GRIPPER
MOVE PD
SIGNAL 2001
SIGNAL 2004
2004
-2000
1004
R5
-2001
-2004
36
LABEL 1
SIGNAL –2000,–2001,-2002,-2003,-2004
HOME
SPEED 50
SIGNAL 2003
2002
WAIT 1004
SIGNAL –2001, -2004
MOVE PE
OPEN GRIPPER
HOME
SIGNAL 2002
DELAY 10
SIGNAL –2002
GOTO 1
Inicialización
Recoger Pieza
Colocar Pieza
en Fresadora
Sacar Pieza
de Fresadora
Entregar Pieza
En Banda
Sep-Dic 2021
RELACION DE LAS ENTRADAS/SALIDAS
DEL ROBOT CON LOS COMPONENTES
DE LA CELDA y LAS TAREAS
Señal Entrada
1000 Fresa Lista
1001 Fresa Termina Maquinado
1002 Artículo en Estación de LLegada
1003 Riel en Posición Carga Fresa
1004 Riel en Posición Entrega Banda
1000
Controlador
Del
Robot
Fresadora
1001
1003
Señal Salida
2000 Termina Carga de Pieza
2001 Termina Descarga de Pieza
2002 Termina Entrega de Pieza
2003 Mueve Riel a Carga Fresa
2004 Mueve Riel a Entrega Banda
1002
Banda
1004
Riel
2000
Fresadora
2001
Controlador
Del
Robot
2003
2002
Banda
2004
TAREA
Riel
37
Sep-Dic 2021
 0
0