H*I*
J. C. García Prada
C. Castejón Sisamón
H. Rubio Alonso
lr.;
Problemas Resueltos
de
IeorÍa de fláquinas
y ffecanismos
PgeBasd
Problemas Resueltos
de
Ieoría de lfáquinas
y lfecanismos
tS
=
€.
$l's,
ilo¿
.{d1
t+ É
t
\B-d
J. C. García Prada
C. Castejón Sisamón
l{"r="n9
H. Rubio Alonso
Universidad Cctrlos
III
de
Madrid
THOIVISON
Austroio
. Conodó .
|"4éxrco
. Snooour . Esooño .
RenoUnido
.
EstodosUndos
-rHoIVlsof\l
=---+--'"
Problemas resueltos de teoría de máquinas y mecan¡smos
Juan Carlos García Prada, Cristina Castejón Sisamón e Higinio Rubio Alonso
Diseño de cubierta:
rente Ed¡tor¡al Area Universitaria
:: l:r¡ella Hierro
fuo*yto,,
Preimpresión:
Copibook
iora de Producción:
. '.''
'
7e la Fuente Roio
lmpresión:
Top Printer Plus, S.L.L.
c/ Puerto de Guadarrama, 48
Polí9. Ind. Las Nieves
28935 lvlóstoles (Madrid)
:'i GHT O 2007 International
:-s:r Editores Spain
:- -'¡. S.A.
Reservados los derechos para
todos los países de lengua española. De conformidad con lo dis-
,:xes, 25; 280'15 Madrid
puesto en el artículo 270 del Código Penal vigente, podrán ser casti-
::
:': -:
:
'
gados con penas de multa y píva-
91 4463350
ción de libertad quienes reprodu-
-4302 ló
jeren o plagiaren, en todo o en
:-::s ]paraninfo.es
,., ::'aninfo.es
parte, una obra l¡teraria, artística o
:':s: en España
-::: n Spain
:'.
:
:s
378-84-9732-495-3
:o Legal: M-14.125-2007
científica fijada en cualqu¡er tipo
de soporte sin la precept¡va autorización. N¡nguna parte de esta
publicación, incluido el diseño de
la cubierta, puede ser reproductda, almacenada o transmitida de
ninguna forma, ni por ningún med¡o, sea éste electrónico, químico,
mecánico, electro-ópt¡co, grabac¡ón, fotocop¡a o cualquier otro,
sin la previa autorización escrita
por parte de la Ed¡torial.
Otras delegac¡ones
"., :r Centroamérica
-. aa1, 281 29 AG
:. ::a 281-26-56
: . ::s ¡mar . nternet.com.mx
: - '-:i j.thomsonlearn ng.com
.,:'::
Cost¿ Rica
EDISA
Tel.lFax (506) 235 89-55
[email protected]
mx San José
Repúblic¿ Dominicana
Caribbean ¡/arketing Services
Tel. (809) 533-26-27
Fax (809) 533 18'82
[email protected],do
DF
Colombia
-:
.:
'
:-
-::,
::.
-a7 758-7s-80 y
-a7 1581573
81
-:--..Ocoqui.net
:
Tel. (571) 340-94'70
Fax (571) 340 94 75
[email protected]
Bogotá
Boiivia
Librerias Asocradas, S.R.L.
Tel.iFax (591) 2244 53 09
[email protected]
531-26-41
aa2l 524 46 88
:9.-Onetexpress.cl
Pasaje Santa Rosa,5141
C.P 141 -Ciudad de Buenos Aires
Tel. a833 3838/3883'4831 0764
[email protected],ar
Guatem¿la
Textos, S.A.
Tel. (502) 368 01 48
Fax {502) 368-15-70
textos@infovia com.gt
Guatemal¿
Cono Sur
:42
El Salvador
The Bookshop, S.A de C.V
fel. (503) 243 70-17
Fax (503) 243 12 90
[email protected]
San Salvador
Ediciones Ramville
Iet. $A2l 193-24 92 y 182'29-21
Fax (582) 793 65-66
tclibros@aüglobal.net
ESENTACIÓN
PITULO
1.
IX
Introducción a la Teoría de Máquinas y Mecanismos
L
l.
1.2.
I
Introducción
1
Conceptos bisicos
I .2. l. Míquinas
2
|
.2.2.
1.2.3.
1.2.4.
1.2.5.
1.2.6.
3
Eslabón rs. pieza
Par elemental. Junta o cierre del oar
Eslabores simples y compuestos. Manivela, biela
Cadena cinemática. Mecanisrnos ¿:s. estructura ....
Inversiones de un mecanismo
5
5
6
1
8
1.3.
Codificación de los mecanisrnos
1.,1. Grados de libertad de un mecanisrno
1.4.1. Aplicación. Síntesis de Gruebler
1.5. Cuadrilátero articulado
I .5. 1 . Teorema de Grashof
1.5.2. Curvas de biela. Curvas de acoplador .....
1.5.3. Técnicas de análisis de mecanismos: analítica, compleja, gráfica
8
ll
l2
l4
t6
l8
l9
Problemas resueltos
PITULO
2.
Resistencias en máquinas
2.1
.
22
29
.
Contacto entre sólidos. Rozamiento seco
. Rozamiento al deslizamiento
2.1.2. Rozamienlo de rodirdura y p¡volrmiento ..
lntroducción a la teoría general de engrase. Rozamiento viscoso
Mecanismos elementales
2.3.1 . Apoyo de ejes y árboles, quicioneras y rangui.rs
30
2.1 .1
2.2.
2.3.
-tl
32
34
38
38
Problemus resueltos
43
O
ITES-Paraninfo
l"tdtce de mater¡as
)APITULO
3.
Cinemática de máquinas ...
3.1.
3.2.
3.3.
3.4.
Problemas
)APíTULO
4.
60
64
66
68
resueltos
1l
Dinámica de máquinas
,+.3.
...
.
Fuerza
reducida
+.1.2. Mrse retlueidu
4.2.3. Fuerza equilibrante
reducicla
...
tuerza
l.
I
16-5
r66
Introducción
-5.2. Clasificación de los engrarrajes
-5.3. Nomenclaturii . ..
-5.,+. Perfiles conjugados
5.-5. El oerfll de evolvente
-5.-5.l. La función evolvente
-5.6. Nonnaliz¿tción de los englartajes
5.1 . lnterf'erencia v número límite de dientes
5.8. Procedimientos de talla para evitar la penetración
-5.8.1. Vanación del ángulo de inclinación del flanco de la cremallera
-5.8.2. Rebaiado del dentado de la cremallera
-5.8.3. Desplazamiento de la cremallera de talla
-5.9.
5.10.
5.11.
5.t2.
-5.13.
l0
lll
rcsueltos
1ó6
161
112
l7-5
.
r
102
103
103
105
Engranajes
5.
l0l
10.+
¿.s.
E,sflrerzos de inercia en rnecanismos
Problenlas
5.
48
52
55
58
58
59
.
4.1. lntroducción
4.2. Equivalencia dinámico-ener-eética de un nrecanisrno de un grado de libertad .....
4.2.1
)APITULO
41
lntroducción
Determinación de los centros instantáneos de rotación (CIR)
3.2.1. Teorema de los tres centros
Técnic¿rs nara la determinación de velocidades .
3.3.1. Métoclo de las velociclacles relativas
3.3.2. Método de proyección o componente axial
3.3.3. Cinema de velocidades. Homologías ...
Técnicas para la determinación de aceleraciones
3.4.1. Estudio de las aceleraciones relativas
3.4.2. Cinema de aceleraciones. Homologr¿rs
116
t7l
r80
.
182
182
r83
184
Espesor del diente
Longitud de engrane. Grado de recubrirniento .
-5.10. l. Longitud de engrane y arco de conduc'ción ...
5.10.2. Grado de recubrimiento o coetlciente de engrane
r88
Montaje de los en-eranajes
5.1 l.l. Distancia entre ejes de funcionamiento
Verificación de las dimensiones de los engranajes
Trenes de engranajes
5.13.1. Clasificación de los trenes de engranajes
5.13.2. Diserio de trenes de engranajes . . . .
-5. l-1.i. Tlenes de engranrje: epicicloidalcs . .
r93
191
.
.
Problemas
resueltos
r90
r90
l9l
205
206
201
208
2t3
221
]IBLIOGRAFIA
28-5
NDlCE ANALíTICO
281
.
TES-Paraninfo
<<a
nuesÍros ntoesÍros e inoLtielos ulLtmnos>,
La Teoría de Máquinas y Teoría de Mecanismos son asignaturas que pertenecen a lo que se ha
llamado en denominar Teoría de Máquinas y Mecanismos TMM. En la actualidad. el IFToMM
<Federación Internacional para la promoción de los mecanismos y la Ciencia de Máquinas> es el
organismo internacional que se ocupa más directamente de los temas relacionados con la Cinemática y Dinámica de Máquinas.
El objetivo de este trabajo es el de completar y ampliar algunos aspectos de estas asignaturas
que, o bien no han sido tratados anteriormente, o por su dificultad requieren un¿i presentación más
amplia en fbnna de problemas. Se ha procurado que los problemas visualicen el cclmportantiento
cinemático (posición, velocidad y aceleración) y dinámico (fuerzas y pares) de los elementos.
miembros o eslabones de la máquina en su conjunto. como parte fundamental de cualquier sistema
mecánico actual.
No se ha pretendido ser exhaustivo en la presentación de todos los tópicos qlle nos encontramos en el estudio de las máquinas y mecanismos sino tratar aquellos aspectos que. en nuestra experiencia docente, hemos considerado más interesantes. Presentamos en este libro un desarrollo
teórico-práctico de la parte correspondiente al diseño preliminar de máquinas y mecanisrnos.
Esta parte introductoria básica podría servir como apoyo a las asignaturas de Teoría de Máquinas (titulación de Ingeniero lndustrial) y Teoría de Mecanismos (titulación de Ingeniero Técnico
Mecánico) actuales o sus equivalentes en posteriores refbrmas de los planes de estudio.
La estructura de los capítulos del libro se ha hecho según el siguiente esquema:
o Conceptos básicos de TMM.
o Lista de problemas resueltos: Se presenta una colección que va desde los problemas
sencillos y teóricos a las aplicaciones más reales.
más
Al principio de cada capítulo, se tratarán los conocimientos descriptivos de la Teoría de Mríquinos v Mecanismos. en el marco de la Ciencia y de la Técnica, junto con los objetivos didácticos
propuestos, base teóricr necesaria para proceder a una resolución satisf'actoria de los problemas de
menor a mayor diflcultad.
O
ITES-Paraninfo
ii
Presentación
La programación de los contenidos teórico-prácticos se ha realizado pensando en el alurrno. en
su adecuada asimilación de los distintos conceptos, con un aumento en la dificultad de los contenidos y unii adecuada dosificación de la herramienta matemática a utilizar. La fbrmación en el campo de la TMM del futuro Ingeniero se realiza de una manera progresivu y se da una visión p¿rnorámica de la realidad profesional introduciendo desde el primer momento el ámbito inclustrial y su
problemática.
La fbrmación previa que cabe suponer en el alumno para el mayor aprovechamiento de los
problemas de este libro está relacionada con las siguientes materias: Física, Cálculo, Algebra y
Expresión Gráflca.
También debemos referirnos a los contenidos científicos de asignaturas como: Elementos de
Máquinas, Diseño Mecánico. Tecnología de Fabricación, Cálculo de Máquinas. Teoría de Vehículos, Ferrocarriles y Transportes, que utilizarán en mayor o menor medida los conocimientos desarrollados en este libro de problemas.
La Teoría de Máquinas se ocupará de describir: ¿Qué es una máquina'?, ¿qué elementos la
componen?, y ¿cómo funcionan dichos elementos'l: y así, se podrá determinar ¿qué requerirnientos
debe cumplir? y ¿a qué solicrtaciones va a estar sometida? En una última fase, y a partir de los
modelos y soluciclnes descrit¿is, se podrán diseñar y calcular los mecanismos. de fbrma que cumplan esos requerimientos y soporten esas solicitaciones.
Este carácter fundamental justifica que en esta materi¿I. adernás de tratar los contenidos propios
de esta asignatura. se usen y arnplíen los conocirnientos adquiridos en otras. conro cs el estuilio de
la cinemática y la dinámica del sólido rígido, estudiados en las asignaturas de Física.
El estudio de la cinemática y dinámica de mecanisrnos y máquinas y su aplicación a problemas se ha estructurado sigr.riendo las líneas:
1.
'
2.
3.
- E S- Paran i nfo
Fundamentos de la TMM: después de una introducción y Llna presentación de la evolución
histórica, se introducen los conceptos de máquina, mecanismo, par cinemático, etc. A con-
tinuación. se estudia la cinemática del movimiento plano, con atención al análisis de
trayectorias, velocidades y aceleraciones. Finalmente, se realiza un breve repaso de la dinámica del sólido rígido.
Análisis de mecanismos articulados. Se aborda el estudio de la cinemática y dinámica de
mecanismos, presentando los métoclos analíticos y gráficos de análisis. Para terminar
"stosel equilibrado de máquinas.
con
Estudio de las bases teóricas de la cinemática y dinámica de las transmisiones por en-rranajes.
En este capítulo"..
1.1. Introducción
1.2. Conceptos básicos
1.2.1. Máquina
1.2.2. Eslabón
1.2.3. Par elemental. Junta o cierre
{el nar
1.2.4. Eslabones simples y compuestos.
Manivela, biela
1.2.5. Cadena cinemática. Mecanismo
1.2.6. lnversiones de un mecanismo
1.3. Codificación de los mecanismos
1.4. Grados de libertad de un mecanismo
i. +.
i.
nór
¡.".-i"-sj"t;Jr'ffi
1.5. Cuadrilátero articulado
i.s.l.
'!.!.?.
#;;
prnto;;;;;;
Teorema de Grashof
1.5.3. Ángulos de transmisión
na
@ ITES-Paraninfo
:
J-cción a la Teoría de Máquinas v Mecanismos
1.1. lrurnooucctóN
El estudio de la cinemática y dinámica de mecanismos y máquinas, junto con su parte introductoria,
se ha estructurado siguiendo las líneas enmarcadas a continuación:
o Fundamentos de la TMM:
después de una introducción y una presentación de la evolución
histórica, se presentan los conceptos de máquina, mecanismo, par cinemático, etc.
. Se repasan y ponen al día los conceptos relacionados con las resistencias pasivas en los pares
cinenráticos de los mecanismos. Se presenta y justifica el empleo de articulaciones con resistencias pasivas lubricadas (fricción despreciable) y se estudian los fundamentos de la lubricación.
o A continuación, se estudia la cinemática del movimiento plano, con atención al análisis de
trayectorias, velocidades y aceleraciones. Se aborda el estudio de la cinemática de los mecanismos articulados, presentando los métodos analítico-gráficos de análisis.
o Se realiza un breve repaso de las ecuaciones fundamentales de la dinámica del sólido rígido,
poniendo especial hincapié en la obtención de las reacciones en los pares y apoyos mediante
métodos analítico-gráficos. Se analiza el problema de la trepidación y pares de vuelco en el
eslabón tierra del mecanismo, como introducción al equilibrado de mecanismos planos y ejes
de máquinas.
o Estudio
o
de la cinemática y dinámica de las transmisiones por engranajes. Se presenta la teoría
general de engranajes, fabricación y normalización, para a continuación dar paso al estudio
cinemático y dinámico de distintos tipos de engranajes y trenes.
Se plantea el análisis completo de un mecanismo complejo: topología, cinernática. dinámica y
sistema de tmnsmisión.
1.2. Corucepros
BÁstcos
La Teoría de Máquinas y Mecanismos trata el estudio del comportamiento de un erupo importante
de Sistemas Mecánicos, en cuanto a sus movimientos absolutos y relativos entre los elementos del
sistema mecánico, así como las fuerzas de interacción entre ellos de manera que generen movimientos y transmitan fuerzas útiles en el entorno de uso.
Existen dos maneras de abordar el estudio de las máouinas:
o Análisis de máquinas.
o Síntesis de máquinas.
El primero desarrolla el comportamiento cinemático y dinámico de máquinas prefijadas y
el
segundo trata de definir la estructura de la máquina para que realice determinados movimientos a
partir de fuerzas previamente definidas. En este libro nos ocuparemos fundamentalmente del análisis
de máquinas, abordándose los conceptos de la síntesis de máquinas sólo en aquellos casos que lo
requieran.
Para el análisis de máquinas, en primer lugar, se inicia el estudio de la Cinemática de las máquinas y mecanismos, para continuar con la Dinámica, es decir, el estudio de las fuerzas involucradas, a
las cuales se les suele clasiflcar en dos grandes grupos: fuerzas estáticas y fuerzas dinámicas, dentro
de estas últimas podemos considerar las inerciales como aquellas que en multrtud de ocasiones deberemos considerar como las de mayor interés.
En todo el estudio se considerarán los elementos que constituyen a la máquina o mecanlsmo
corno sólidos rígidos, obviando los comportamientos debidos a la elasticidad y resistencia de materiales que se considerarán en otras disciplinas. En la literatura técnica los sólidos rígidos que constitu¡ren las máquinas toman diversos nombres: eslabón, elemento, miembro o barra, cualquiera de
ellos se usará en el desarrollo de los problemas del libro, aunque el término eslabón será el más
comúnmente usado.
Introducción a la Teoría de Máquinas v Mecanismos
1.2.1.
MÁourrun
Una Máquina es un agruparniento de elementos sólidos rígidos, adecr-radamente dispuestos para mantenerse en contacto permanente y permitiendo el movimiento relativo entre ellos. siendo capaz de
transmitir movimientos y esfuerzos desde unos elementos a otros (réctse Figura | . l). En la Figura I . La. se presenta la superestructura de una máquina genérica. mientras qlte en lar Figr"rra 1. I .b. se
detallan sistemas de la infiaestructura, donde se observa la multitud de sistemas y subsistemas mecánicos en conjunción con los de otras disciplinas: eléctricos, electrónicos. control. térmicos. etc.
SISTEI\,{A DE SUSTENTACION
(a)
(b)
Figura 1.1. Esquema general conjunto mecánico (a: macro), (b: micro).
Cuando consideramos el estudio de las características de la transmisión del movimiento en la
nráquina. es habitual utilizar el término E.stu¿lio tlel Mer:ani.smo para ref'erirnos al estLrdio de las características geomé trico-cinemáticas.
Es usltal designar como N{áquina aquella en la que los aspectos ref-erentes a las interacciones de
las fuerzas. aplicadas entre los distintos elementos de la rnáquina. son de importancia, así couto. se
designa corno Mecanismo a aquel en el que las fuerzas no son el objeto principal de su funcionamiento y sí lo es la transmisión de movimiento entre los eslabones.
El estudio de los movimientos y fuerzas entre los dif-erentes elementcls constituyentes de un¿l
Mácluina o Mecanismo puede ser tratado mediante la aplicación de la Mecánica. En el írnlbito de la
Teoría de Máquinas y Mecanismos vamos a poner especial empeño en el desarrollo de nuevos conceptos que sirvan para un estudio m¿is eficiente de las máquinas habitu¿rlmente us¿rdas en la industria. Ello nos llevará a restringir en muchos c¿tsos dicho estudio a los mecanismos planos, los cuales
son de común Ltso en lii maquinaria industrial, es decir aquellos cuyos eslabones. y por tanto cualquier punto de la m/ic¡uina. evolucionan siempre en planos paralelos. Prácticamente, la totalidad de
las máquinas pueden ser estudiadas como una concatenación y superposición de mecanisntos planos
en las tres direcciones clel espacio. Lo anterior nos permite realizar el modelo en el plano de trabajo
del comportamiento del mecanismo.
Si analizamos los movimientos de los eslabones de una mácluina diferenciamos movimientos típicos. El movimiento de rotación alrededor de un eje entre dos elementos del mecanismo consee utivos es el rnás utilizado en los mecanismos planos. El movirniento de traslación rectilíneo es un caso
singular de una rotación de radio de giro inflnito. Además de los ¿rnteriores movimientos comentados, hemos de considerar el helicoidal y el esférico. movimientos que usan las tres dimensiones del
espacio. El movimiento helicoidal permite la adición de una rotación a una traslación rectilínea. y el
movimiento esférico permite la rotación alrededor de un punto de un elemento respecto a otro. En l¿r
Figura 1.2 se pueden observar algunos de estos movimientos entre dos eslabones.
@ ITES-Paraninfo
':'3cucción a la Teoría de Máquinas y Mecanismos
Par de rotación
o de revolución
Figura
1.2.
Movimientos típicos de un eslabón.
Si caracterizamos el movimiento de los eslabones de una máquina por el
moclo de sus movimientos. podemos considerar tres modos de funcionamiento:
o Modo con movimiento continuo.
o Modo con movimiento de vaivén.
r
Modo con movimiento intermitente.
Estos tres diferentes
modos de funcionamiento penniten la realización de movimientos en los
elementos del mecanismo: sin interrupción ni parada (eje de motor en rotación
constante, eslabón 2
en la Figura 1.3'a), modo con ciclo de avance y retroceso con tiempo de paracla
infinitesimal (cuadrilátero articulado con balancín, cleslizadera del mecanismo cle biela manivela.
eslabón 5 de la Figura l'3'b) y con paradas temporizadas (mecanismo de Ginebra. válvula
con tiempo cle apertura y
cierre finito, eslabón cruz de malta en la Figura 1.3.c).
(
Figura
1.3.
c.)
Modos de funcionamiento de los eslabones de una máquina. a) Manivela
O"A, modo
continuo. b) Deslizadera 5, modo de vaivén. c) Cruz de Malta, modo intermitente.
Una vez presentadas las características principales del funcionamiento de los
mecanismos planos, se pasará al estudio de sus elementos y sus agrupamientos funclamentales (pares,
cadenas
cinemáticas, mecanismos, etc.) para producir la transmisián del movimiento y
cle la l,uerza entre los
eslabones de la máquina.
-:araninfo
lntroducción a la Teoría de Máquinas v Mecanismos
1.2.2. EsLneóN vs. PtEzA
Al componente básico de un mecanismo por complejo que sea se le denomina de diferentes maneras: elemento, eslabón, miembro o barra. La denominación de barra es debida a que habitualmente, para facilitar el estudio del mecanismo, se suele sustituir el elemento o eslabón real por un
grafo descriptivo con fbrma de bana, es decir, un segmento rectilíneo que se une a su vez, al menos,
a un elemento del mecanismo. Ello no impide asumir que todo eslabón, elemento, miembro o barra
tiene asociado un plano de dimensiones adecuadas para disponer en é1 los puntos de interés para el
análisis cinemático y dinámico. En la Figura 1.4 se presenta un eslabón denominado biela, el cual
está constituido por cuatro piezas unidas por tornillos de fijación, formando un sólido rígido del
mecanismo motor de una máquina. El concepto de pieza se encuadra dentro del concepto de eslabón
en un subnivel inferior a é1, un conjunto de piezas unidas rígidamente según un plano de montaje
constituye un eslabón.
Figura
1.4.
Eslabón tipo Biela, formado por un conjunto de piezas:
tornillos, arandelas, cabeza de biela, casquillos.
1.2.3. P¡n elen¡ENTAL.
Jururn O CIERRE DEL PAR
La agrupación de dos elementos de un mecanismo se denomina: junta, par, par elemental o par
cinemático cuando cumple dos condiciones de funcionamiento: contacto permanente según un punto, línea o superficie y la posibilidad de permitir el movimiento relativo entre los dos elementos del
par. Con el concepto de par elemental nos aseguramos la conexión de los eslabones de una máquina
y hacemos que la máquina forme un conjunto compacto. En la Figura 1.5 se presentan un par de
traslación, un par de rotación y un par de rodadura.
2 rueda sin
deslizar sobre
'1
1-2 Par elemental
de rodadura
2-3 Par
elemental
de traslación
Figura
1.5.
Par de traslación: eslabones: @guía, @corredera, Par de rotación: @soporte,
@manivela. Par de rodadura: @soporte, @disco.
O
ITES-Paraninfo
La clasificación de los pares según las diferentes características de la unión de los clos elementos.
en cuanto a: tipcl de contacto, tipo de movimiento relativo. graclos de libertacl. etc.. permite la clenonrinación específica del par (réan.se diversas clasificaciones en los esquemas de la Figura 1.6).
Clasificación según el movimiento relativo
entre sus puntos
. Par de primer grado o lineal
Clasificación según el movimiento relativo
entre sus puntos
. Par de segundo grado o superficial
a) Par prismático: describe una l,nea recta
b) Par de rotación: el punto describe una
a) Par plano: describe un plano
b) Par cilíndrico: describe un cilindro
c) Par esférico: describe una esfera
circunferencia
c) Par helico¡dal: descnbe una hélice
i'
pr¡smático
v
*
qr¡'''-'t#*'
Par
ii
/4h
Par de rotac¡ón
:
Par plano
Par
c¡l¡ndrico
Par esférico
. Par de tercer grado o espacial
. Clasificación según el número oe Darras
o miembros (orden del par o de la junta):
. Par binario. par formado por dos barras
. Par ternario: par de tres barras
Par P-ario. par formado oor P barras
Clasificación según la superficie de contaclo
. Par superior (de contaclo lineal o puntual)
. Par inferior (de contacto superficial)
Figura
1.6. Tabla de clasificación de pares
elementales.
Técnicamente. para mantener el contacto permanente entre los dos elementos clel par es necesaria la utilización cle diversos tipos de cierres de junta. tales como: cierre de fbrma, crerre de tuerza
o el cierre de enlace. En la Figura 1.7 se muestran la condición de par y jLrnta. y ejernplos cle cacla
un0 de los tipos.
1.2.4.
ESLNAONES SIMPLES Y COMPUESTOS. MRITIIVCTR, BIELA
La situacirin rnírs habitual de un eslabón en un mec¿,rnismo es la de aquel que tiene una pareja de
pares elernentules en sus extrernos. lo cual le perrnite conectarse con el elemento anterior y
el posterior y transnlitir tle esta luanera el movimiento y la fuerza, a este tipo cle eslabón se denomina eslabón o elemento simple. Aquellos eslabones que tienen más cle dos pares elementales se clenominan
eslabones o elementos compuestos. Los eslabones simples conectaclos al soporte por uno cle sus
pares se denominan manivelas. Su nrovimiento es cle rotación. Los eslabones simples. conectados
por sus pares elementales a otros dos eslabones, se denominan en
-[eneral bielas. Su rnovimiento es
lei superposiciórl de una rot¿lción y una trasl¿rción. En la Figura 1.8 se observan eslabones
compuestos ternarios y eslabones simples binarios.
S-raraninfo
lntroducción a la Teoría de Máquinas v Mecanismos
Par elemental o cinemático
. Dos miembros contiguos
. En contacto permanente
. Con movimiento relativo entre ellos
1. Cierre de forma:
El contacto está asegurado por
la forma de los dos miembros
del par (cilindro-émbolo)
Cierre del par o junta
Asegura el contacto entre los dos miembros,
limitando el movimiento entre ellos
2.
3.
Cierre de fuerza:
El contacto está asegurado por lafuerza que ejerce
un elemento elástico interpuesto (leva-seguidor)
Cierre de enlace o de cadena:
El contacto está asegurado por medio de otro miembro
del mismo mecanismo (engrane de dos ruedas dentadas)
Seguidor
. Rueda dentada: 2
. Rueda dentada: 3
2
Figura
1.7.
Par y cierre de par. Tipos de cierre.
4 eslabones simples (binarios).
2 eslabones compuestos (ternarios).
Figura
1.2.5. Cnoerur
1.8. Tipos
de eslabones: simples (binarios), compuestos.
crNEMÁTrcA. MEcANrsMo r/s. ESTRUcTURA
Una concatenación de eslabones mediante pares cinemáticos da lugar a una cadena cinemática, la
cual puede ser cerrada o abierta, según los eslabones formen bucles o no. La utilización práctica de
las cadenas cinemáticas hace necesario que a uno de los eslabones se le restrinja su movimiento
completamente, convirtiéndose en el eslabón tierra o soporte, la cadena cinemática pasa a denominarse: Mecanismo.
Dicho mecanismo puede tener diferentes grados de libertad (t:éase el Apartado 1.4) que definen
su movilidad. Cuando al analizar la movilidad de un mecanismo obtenemos un número de grados de
libertad nulo (GDL) consideraremos que no son verdaderos mecanismos pues el movimiento relativo
entre sus eslabones y por tanto en sus pares no existe y los denominaremos estructuras. Los mecanismos básicos usados en máquinas son habitualmente de
I GDL, por su sencillez.
con un único actua@ ITES-Paraninfo
-:,..ión
a la Teoría de Máquinas v Mecanismos
dot generamos movimientos y fuerzas determinadas. En la Figura 1.9 se muestran ejemplos de cadenas cinemáticas cerrada y abierta y mecanismos con distintos grados de libertad (0, 1,2).
MECANISMO: cadena
cinemática con un
miembro fijo (TIERRA).
ESTRUCTURA (0 gdl)
N/ECANISMo (1 gdl)
IVECANISMO DESI\4ODRÓMICO
cuando fijada la posición de un
punto, todos los demás tiene
posiciones definidas.
IVECANISIt/O (2 gdl)
quinto qrado
-tr
cuarto grado
pnmer graoo
"lineal"
I
I
segunoo graoo
tercer graoo
"espacial"
MOVILIDAD DE UN MECAN SMO:
- Punto P ligado a un miembro del par
- Se estudia el movimiento .especto a
nrrn m omhrn
Figura
1.2.6.
1.9.
rlol nrr
Cadenas cinemáticas: cerrada, abierta. Mecanismos.
ltr¡veRsrorrrES DE uN MEcANtsMo
La elección del eslabón al que restringir su rnovirniento. cn uni-r eadena cinemática genérica es arbitrario. lllego Lln¿r cadena cinemática de 1y' eslabones da lugar a N mecanismos según el eslabón tierr¿r
qLle se el¡a. cada uno de los l/ posibles mecanismos generados se denomina una inversión. En la
Fi-uut'a 1.10, que muestra la transformación de un mecanismo biela m¿rnivela cn dil'erentes invelsiones. Debemos expresar que los rnovimientos relativos de los eslabones según cada par cinernático.
perr.nanecen iguales. mientras que los n.tovimientos absolutos si carnbian.
1.3. CoorrrcacróN
DE
Los MEcANtsMos
Es habitual referenciar el mecanismo por un código de letras según los tipos de pal' plesentes en el
rnecanismo -qeneral. El pal plismáticcl (traslación) P. el par de lot¿ición R. el par cilíndrico C. el par
esférico S, etc. En el caso de una máquina biela manivela
'a'i
nfo
l¿t
codiflcación sería: PRRR. etc. En la
lntroducción a Ia Teoría de Máquinas v Mecanismos
9
caoena ctnemailca
\l-l
eslabón 2 = TIERRA
eslabón 1 = TIERRA
\.J'
(A
v
eslabón 3 = TIERRA
eslabón 4 = TIERRA
Figura 1.10. Inversiones cinemáticas de un mecanismo biela manivela.
Figura l.l I se presenta un mecanismo biela manivela excéntrico: tiene I p¿rr de rotacií)n en r: I
pistón con soporte, I par prisrnírtico pistón-émbolo y 2 pares de lotación en la manivela. coclificación PRRR.
'l-as cadenas cinemáticas nás sencillas de un grado cle libertad son: la manivela y la corredera
(.t:éuse Figura l.l2), las cualcs constan de dos eslabones conectados por Lln par de rotación (rnanivela) o de traslación (corredcra). Dentro de las ciidenas cinemáticas cerradas. aquellas en las clue al
tttenos un eslabón es inicio y final de cadena, la nrás interesante es Lln mecanismo arnpliafflente Llsado en las máquinas denomin¿rdo cuadrilátero articulado. mecílnismos de I GDL que a partil dcl
conocimiento del estado de uno de sus eslabclnes móviles se obtiene el est¿tdo de toclos los demás. E,s
lmport¿tnte en este punto considel'ar que en el estudio de los rnecanismos que vamos a rcalizar deja a
ttn lado los problemas de c¿ilculo, diseño cl firbricación de los eslabones y se centra en la -reometría
del eslubón y \u nrovinlicnt().
corredera
Figura 1.11.
Máquina biela manivela
excéntrica.
Figura
1.12. Cadenas cinemáticas sencillas:
manivela v corredera.
O
ITES-Paraninfo
¡ntroducc¡ón a la Teoría de Máquinas v Mecanismos
Con las definiciones hechas hasta el momento tenemos la capacidad de representar gráficamente.
mediante elementos gráficos elementales en el plano, el comportamiento de una máquina cuyos elementos constitutivos realizan movimientos en planos paralelos, y proceder a su análisis. O, al revés.
a partir del esquema gráfico sintetizado de los mecanismos pasar al diseño de la rnáquina correspondiente.
Dado que los eslabones más utilizados son aquellos que tienen dos pares elementales, utilizaremos como representación gráfica del eslabón un segmento que una los dos pares. Si el eslabón
tuviera tres o más pares utilizaríamos como representación gráfica un triángulo en cuyos vértices se
dispondrían los pares y en los eslabones con un número superior de pares la figura geométrica plana
corresoondiente (t'éctse la Fisura I .1 3).
Cadena cinemática que posee:
4 eslabones simples (binarios)
2 eslabones compuestos (ternarios)
Cadena cinemática que posee:
4 eslabones simples (binarios)
7 pares de rotac¡ón
1 par de traslación
7 pares de rotación
Figura 1.13. Representación gráfica de mecanismos: pares de rotación y traslación.
La representación gráfica de los pares de rotación lo haremos mediante un círculo en el punto
La representación gráfica de los pares de traslación lo haremos mediante un grafb representativo del contacto guía deslizadera. En la Figura 1. I 3 se observa que el par
de trasl4ción con guía circular: deslizadera-guía se podría sustituir por un eslabón manivela con eje
en el centro de la circunferencia que define a la guía y articulado con el eslabón biela. dando lugar al
concepto de mecanismo equivalente. La utilización de grafos para analizar la cinemática de una
cle contacto eje con rótula.
máquina nos permite utilizar variaciones. de manera que exista más de un mecanistno que puede dar
lugar a diferentes interpretaciones como máquina, dando lugar a los mecanismos equivalentes, siempre que en esa operación los movimientos relativos de los pares cinemáticos no varíen. En algunos
casos deberemos tener en cuenta el anterior concepto: meclnismos de gran complejtdad a priori se
pueden entender y analizar de manera sencilla transfbrmándolos en sus mecanismos equivalentes.
Véase la Fisura 1.14.
.
Un mecanismo, en una deierminada posición, es
cinemáticamente equivalente a otro, si posee las
mismas características de velocidad y aceleracion
Expansión de pares cinemáticos: conservan el
movimiento relativo variando la forma.
Figura 1.14. Mecanismos equivalentes.
-!S-Paraninfo
lntroducción a la Teoría de Máquinas v
Mecanismos
11
En ntuchos casos, en el estudio de una máquina hay grupos de eslabones y de pares asociaclos
qlle no necesit¿rn ser representados en detallet por e.jemplo, un apoyo por rodamiento a bolas no
necesita a los ef'ectos del análisis cinemático representar los pares cinemáticos internos. pues corno
fícilmente se ve. puede ser sustituido por un par de rotiición. De la misma manera, para hacer el
anítlisis de un necanistno con engrrnljes. sustituiremos los pares entre los dientes por el contacto de
dos rnedas de fricción del diántetro primitivo correspondiente.
1.4. Gnnoos
DE LTBERTAD DE uN MEcANtsMo
En cualquier t'necanismo que analicemos uno de los aspectos de mayor interés, qlle nos permitirá
entender su funcion¿tmiento. es el conocimiento del número de variables independientes a deflnir
para conocer en cualquier instante el estado de cualquier eslabón y por tanto del mecanrsrno. es
decir. el número de -erados de libertad (GDL) o la movilidad del mecanislno.
Un eslabón. b¿trra o elemento de un mecanismo en el espacio tiene seis graclos de libertad. si
restringintos su n'lovimiento al plano pasa a tener tres grados de libertad: uno podría ser el giro en el
plano. y los otros dos las coorclenadas de un punto del eslabón.
De lo anterior podemos decir que: un mecanismo de N eslabones tiene inicialmente 6N GDL en
el espacio o 3N GDL en el plano proporcionaclo por los eslabones individualmente considerados.
Como los eslabones están conectados mediante pares. deberemos estudiar cómo ¿if'ectan los pares
elenentales usados al grado de libertad del rnecanismo, es clecir. qué restricciones intloducen.
En un par ele¡nental, conexión entre dos eslabones definida anteriormente. puede deflnirse tantbién
el concepto de -erados de libertad del par o cle la junta GDL'.,.. es decir, los graclos de libertad que
permiten los movimientos relativos posibles en cada par (traslación. rotación. etc.). Se prescntan a
continuación los GDL'", de dif-erentes tipos de pares:
. Par de rotación: permite un movimiento relativo
I GDL.
de rotación según un e.je en el espacio
o Par de traslación: permite un mo.,,imiento relativo de traslación según una dirección en
espacio, luego tiene
I
CDLp",.
o Par helicoidal: pennite un movimiento relativo de rotación más traslación según
tiene
I CDL'",.
r.rn
el
eje. luego
Par plano: permite el ntovintiento relativo de traslación según las dos direcciones del plano.
luego tiene 2 GDL'...
Par esférico: perrnitc movimientos relativos de rotación según los tl'es e.jes. luego ticne
3 CDLp...
o Par cilíndrico: permite un movimiento relativo de rotación segúrn un eje del espacitl y un lnovimiento según dicho eje, luego tiene 2 GDLp,,
.
Luego, en el espitcio 3D. la conexión de dos eslabones mediante un par, es decir, la introducción de un par elemental disminuye los GDL de la agrup¿rción desde los inicialcs 6 GDL hasta
(6-GDL'.,), Iue-uo:
GDLp",: I disminuye los GDL del mecanismo
GDL'",
-
en (6-1).
2 disminuye los GDL del rnecanismo en (6-2), etc.
Podemos analizar el problerna del número de grados de libertad de un mecanismo 3D analizando cómo varían los grados de libertad iniciales de N eslabones libres. ¿rl ir introduciendo los pares
elerncntales, y por tanto disrninuyendo GDL al mecanismo.
@ ITES-Paraninfo
lntroducción a la Teoría de Máquinas v Mecanismos
PrPz,...,Pr, los6¡/GDLinicialesdisminui-
Si introducimosparescondiferentesgradosdelibertad:
rán según la siguiente tabla:
GDL
:
P, pares de GDL',, :
P. pares de CDL.". :
P, pares de GDL..,
(6-1) Pr
I
2
-
(6-2)
P2
5
-
(6-5)
Ps
(Está claro que no tienen sentido juntas de 6 GDL.". o superior.)
Podemos decir que, en general, el cálculo de los GDL de un mecanismo en el espacio de ,^/ eslabones con uno restringido a tierra (0 GDL) y P' pares de GDL',,.: I, P, pares de GDLpn,:2, etc., es:
GDL
: 6(¡/ l) -
(6- I )
P,
6-2)
P2
(6-5)
Ps
(Fórmula de Kutzbach, 3D)
Para el caso de mecanismos planos 2D con juntas de I o 2 GDLp,,,. se utiliza la fórmula anterior
sustituyendo 6 por 3, está claro que no tienen sentido juntas de 3 GDL'", o superior:
GDL:
3(N
-
r)
-
(3-l)Pr
-
G-2)P2
(6-s)
es decir:
GDL
:
3(N
- l)
2P1
- P2
(Fórmula de Kutzbach Gruebler, 2D)
Véase en la Figura 1.1-5 la definición de mecanismos según el número de GDL.
I
CRITERIO DE GRÜBLER (GRUEBLER)
4
:
I
GDL=
3 (N- 1)-2-\1
1
0
=
<0
I
>
t
=
Si GDL
Si GDL
I Si GDL
I Si GDt
j
i
I
fr = n.o Pares 'l GDL
fz = n.o Pares 2 GDL
N = n.o de elementos
mecanismo G-GDL.
mecanismo desmodrómico.
estructura estáticamente determinada
estructura hiperestática.
Figura 1.15. Fórmula de Gruebler.
Existen casos singulares en que 1a anterior fórmula nos da un valor menor que los grados reales,
y esto es debido a que no hemos expresado las dimensiones de los eslabones, ni el posible paralelismo de los ejes de las juntas de rotación o de las guías de las juntas de traslación. Un ejemplo típico
es el que se muestra en la Figura 1.16, donde al aplicar la fórmula se obtienen características de
estructura (GDL : 0), cuando el mecanismo claramente tiene I GDL. En la lista de problemas resueltos se analizarán qué movilidades podemos obtener a partir de l/ eslabones y de diferentes tipo
de pares utilizados para conectar los eslabones.
1.4.1.
APUCRCIÓN. SírurESIS DE GRUEBLER
utilización de las fórmulas anteriores que nos procuran el número de GDL de ttn mecanismo
a partir del número de eslabones, el número de pares con GDL.", (1 ,2,3,4 o 5), nos permite
hacer una primera aproximación a la síntesis numérica. A continuación, se aplicará la fórmula de
L¿r
TE S-
Paran i nfo
Introducción a la Teoría de Máquinas v Mecanismos
13
MECANISMo (1 gdl)
Figura 1.16. Mecanismo tipo donde la fórmula de Gruebler no ofrece un resultado correcto, caso singular.
Gruebler a mecanismos desde 2 barras a cuatro barras, para obtener las diferentes configuraciones de
interés.
o La aplicación de la f'órmula de Gruebler para un mecanismo de dos barras (uéuse la Figura l. l7), N - 2, en el plano da como resultado:
GDL-3(2-t)-2Pt-P.
GDL :3 - 2Pt - P2
para conectar las dos barras es necesario, al menos, un par elemental.
Figura 1.17. Dos barras unidas con un par de rotación.
Analicemos todas las oosibles configuraciones:
Pt:1
Pr :0
Pt-l
Pt ) |
P::0 GDL:l
P:.:l GDL:2
Pz:l GDL:0
Pr2 | GDL < 0
manivela
maniveladeslizadera
estructura
estructura hiperestática
La aplicación de la fórmula de Gruebler para un mecanismo de tres barras, N
:
3, en el plancr
da como resultado:
GDL
: 3(3-r)
GDL-6
2Pt
- P,
2Pt-P2
Se necesitan, al menos, dos pares elementales para ligar las tres barras y como máximo tres.
@ ITES-Paraninfo
|
':':cucción a la Teoría de Máquinas v Mecantsmos
Analicemos todas las posibles configuraciones:
Pt:2
P:
Pt: I
:0
Pr : 3
Pr
- 0
GDL: 2
dos manivelas o dos desliz¿rderas o una deslizadera y una
nlvela.
Pz- |
GDL:3
brazo articulado de dos eslabones rnás deslizadera o deslizadera más brazo articulaclo dc un eslabón más desliz¿rdera.
P:.-2
P: - 0
GDL:4
GDL : 0
doble manivela másdeslizadera.
Pz: 1 GDL: I
Pt:2
Pt: 1 Pz:2 GDL: 2
m¿t-
estructura con tres pares de rotación o con tres p¿rres de traslaclon.
biela manivela.
doble manivela rnás deslizadela, doble deslizader¿r más doble
apoy().
Pr :0
o
P:.:3
GDL:3
tripleapoyo.
Del anírlisis anterior observamos la aparición de un mecanismo de interés de I GDL, el
mecanismo biela manivela.
La aplicación de la fórmula de Gruebler p¿lra Lln mecanismo cle cllatro barras. GDL : 4, en el
plano da como resultado:
GDL:3(4-l) - 2P,
P.
GDL:9-2Pt
P.
Se necesitan. al menos. tres pares elementales para ligar las cuatro barras
y como nláximo
cLlatro.
Analicernos todas las posibles configuraciones:
Pt:3
Pr
- 0
GDL:3
brazo articulado de tres eslabones, deslizadera de tres GDL,
etcetefa.
Pt:2
Pt: I
Pt- |
Pt:2
GDL: 1
GDL: -5
brazo articulado de tres eslabones y deslizadera, etc.
brazo articulado de tres eslabones. deslizadera de tres GDL.
etcetera.
Pr :3
Pt-4
P::0
P::0
GDL-3
GDL: I
variossistemasarticulados.
o cu¿rtro deslizaderas en ángulo, o
tres deslizaderas y una rotación, o dos cleslizaderas y dos rotaciones. etc.
cuadrilátero articulado.
De los casos estudiados para 2, 3 y 4 eslabones, se han detectado 3 mecanismos con I GDL, que
corresponden a la manivela (2 eslabones), al mecanismo biela manivela (3 eslabones) y al cuadrilátero articulado (4 eslabones). Estos dos últirnos son los de mayor uso en máquinas. ya que penniten la transfbrmación de un movinriento de rotación en otro de rotación o traslación. A continr-lación.
sc estudiarán las condiciones que deben cumplirse, mediante la ley Grashof. para que tengamos mecanismos: manivela-manivela, balancín-balancín, manivela-balancín.
1.5.
CunoRn-Áreno ARTTcULADo
Hemos encontrado que el mecanismo fbrmado por cuatro eslabones articulados, uno de ellos tierra.
tiene un grado de libertad I GDL. Es común en un cuadrilátero designar a los eslabones contiguos n
tierra manivelas de entrada y salida y al eslabón interrnedio biela (L'éase la Figura 1.18). Al ser un
-lS-Paraninfo
lntroducción a la Teoría de Máquinas v Mecanismos
15
MANIVE
oo
Figura 1.18. Definición del cuadrilátero articulado.
mecanismo con I GDL permite transformar un movimiento genérico de rotación en un complicado
movimiento de traslación más rotación en la biela o en otro de rotación con nuevas calacterísticas en
la manivela de salida.
De la observación del comportamiento de los cuadriláteros articulados se deducen dos tipos de
movimientos de las manivelas: el de giro completo (movimiento de manivela) y el giro parcial o
de vaivén (rnovimiento de balancín).
Puntos muertos
La existencia de movimientos de balancín en el cuadrilátero articulado implica la existencia de posiciones singulares, por ejemplo, aquellas que ocurren cuando una manivela alcanza el ángulo máximo
o mínimo en el movimiento de vaivén: debido a que el cuadrilátero articulado tiene I GDL al fijar el
movimiento de una de sus manivelas todo el mecanismo permanece. en ese instante. parado y tenemos un punto muerto.
En la Figura l.l9 se muestra el cálculo geométrico de los puntos de ángulo máximo y mínimo de
los eslabones balancín. Para ello se calcularán las circunferencias que pasan por los ejes de las manivelas y balancines, en su caso, con radio la suma y resta de las longitudes de la biela con las de la
manivela y balancín correspondiente. En el caso del mecanismo manivela balancín una vez alcanzado el punto muerto, en un balancín dado, por alineación de la biela con el otro eslabón (manivela o
balancín) sólo podremos continuar el movimiento mediante un retroceso del ángulo del balancín
considerado hasta alcanzar de nuevo una nueva alineación de la biela con el otro eslabón (manivela
o balancín). Se observa que ante un montaje dado hay posiciones geométricas de punto muerto inalcanzables, salvo cambio de montaie del cuadrilátero articulado.
\r¡
\_v_/
o
(D
(1)
Figura 1.19. Cálculo geométrico de los puntos muertos en un mecanismo articulado
de cuatro eslabones manivela balancín v doble balancín.
@ ITES-Paraninfo
' .:,:.
ón a la Teoría de Máquinas y Mecanismos
1.5.1. TeoReun
DE GRASHoF
En el rnecanismo de cuatro barras de la Figura l.l13 podemos estudiar las relaciones que deben cr-rnrplir liis lon-eitudes de sus eslabones para producir los dif'erentes tipos de movinientos de sus m¿rni'u'elas v blela mcdiante el Teorema de Grashof.
Clasificación de los mecanismos de cuatro barras
Los mecanismos articulados de cuatro barras se pucden cl¿rsificar en dos categorías atendiendo a si
al-euno de sus elementos puede ef'ectuar una rotación completa:
CLASE I: Al menos una de las barras del mecanisrno pr"rede realizar una rotación completa (lret tuti.¡ntr¡s de ntattitelo).
CLASE II: Ninsun¿r de las barras del mec¿rnislro puede realizar una rotación cornpleta Qnectutisntr¡s tle balqttcítt\.
El Teorema de Grashof proporciona un medio peira averiguar la clase a la que pertenece un nrecanistro ¿u'ticulado de cuatro barras con sólo conocer sus dimensiones v disoosición. Si un cuadrilírtero no cr,rrnple clicho teorema. pcrtcnece a la clase Il.
Definición del Teorema de Grashof
Ett uu c'Ltutlt'ilútero drticultulo. ul tuettr¡s uttu tle sus borra.s ut'Íuorá tt¡ntr¡ ntuttit'elo. ett ulcttttu rle lus di.spo.sicione.s posible.s. si .se ter|ficu que la.swno de lus lortgitudes de lus bttrrus
ntolor l ntettor es igucLl o irtfbrior u lu sLttnu de las ktttg.itrttles de las ofrus dt¡s.
En un cu¿idrilátero afticulado que cumple el Teorerna cle Gr¿rshof.
aden'ríis:
¡
Si el soporte del rnecanismo es la bal'ra nrcnor. las dos barras contiguas a é1, actúan de rnanivcItts (mec'ottísntr¡s tle rktble-ttttutite1¿r). Clase L
¡
Si el soporte del mecanisnro es
Llna de l¿rs barras conti-euas a la mcnor. l¿r birrra menor ¿rctúa de
nritnivela y slr opuesta de balancín (mecuttistnr¡s de ntcutirelu-baluttcítt). Clase I.
o Cuando un mccanislro no cnr.nple una de las condiciones antcriol'es, las dos barriis c¡ue
giran respccto al soporte se comportan como balancines (tnec'attistttt¡s de clol:¡le-btrlctttcín¡.
Cllsc ll.
Porolelogratnt¡ orÍiculqtlo; Mecanisrno clonde cada barra es igual a su opuesta (la barr¿r soporte
es igual a la biela. y la manir"ela L. (barra condr,rctora) es igual a la m¿rnivela la (barra conclucida).
En este tipo dc uiccanisr.nos las dos barras contiguas al soporte sor-r manivelas (tttecuttist¡tr¡s tlc tk¡blettttutit'elu).
En l¿r Tabla
l.l
se discuten l¿is dit'erentes conf iguraciones Grashof posibles pal'a Lln cuadril/rtero
a|ticulado cltyo soporte es de longitud Lr y la biela es de longitud 1..
l¿r
Hay clos casos particulares de interés. cllando las dos manivelas clel cuadrilírtero articulado tienen
y se lnontan de manera que:
rnisrna longitud
o
¡
!-:,-:rinfo
E,l movimiento sifatorio en una sea an/rlogo en la otra. relación de transrnisión unidad positivn
(manivelas paralelas). el ratio entre las velociclades angulares de las rnanivelas de salida y entr¿rda es lii unidad con signo pclsitivo.
El movinriento ciratorio en una es el contral'io en h otra. relación de tr¿rnsrnisión r-rnidacl negativa (manivelas antiparalelas o antirotativas). el ratio entlc l¿rs velocidades angr-rlares de las
tnanivel¿rs de salida y entracla es la unidad con signo negativo.
Introducción a la Teoría de Máouinas v
Tabla
Mecanismos 17
1.1. Configuraciones Grashof de un cuadrilátero articulado.
DOBLE-MANIVELA
/L^
mani vela-biel¿r-nrani vela
Lr+Lr<L.+Ll
- barra menor
CD - b¿rrra mayor
AB - barra fija o soporte
AB
\IA\IYELA-IiALANCIIi
rnanivela-biela-balancín
L,+Lr<Lr+Ll
- ban'a lnenor
- barra m¿ryor
AB + barra fija o soporte
BC
CD
t4 \
\ ..=v_
--
DOBI,E-BALANCIN
b¿rlancín-biela-balancín
Lr+Lr<L,+Ll
+ barra rnenor'
AB - barra mayor
AB > barra fija o soporte
CD
PARALELOGRAMO
r,f
LI
I
i
\
Lr
-
Li
-
RTICULADO
Ll
siendo
(Lr
\.C./\.e,/
'--'-/
f
A
:L3) y (Lr-L1)
BC y AD tienen el mismo sentido de -siro
---=--
C^--.--/,t
ANTIPARALELOGRAMO ARTICULADO
L,
Lr+L,:L3*La
l
\
siendo
\
e,/
(Lr
:L:) y (Lr:Lr)
BC y AD tienen sentidos de giro opuestos
@ ITES-Paraninfo
:
-:: .^ a la Teoría de Máauinas v Mecanismos
La aplicación del Teorema de Grashof al mecanismo biela manivela. permite obtener las condiJr!)nes -seométricas de funcionamiento (aéctse la Figura 1.20).
rlre
URE
t¡A tr!:
¿BAnRAS
SPI-]F9TA9
r{!uAtr
5?
¿LÁ SARRA
i,1Ft'l0R
F:
Lq f IJAl
¿LA B'.RÉA
FÍ
'dEI.]OR
aoilfrcu.{
¡.
Figura 1.20. Clasificación según el Teorema Grashof del cuadrilátero articulado.
1.5.2. Cunvls
DE BIELA.
CunvnS DE ACOPLADOR
Es de gran interés para el uso del cuadrilátero articulado en maquinaria analizar el comportamiento de
los rnovimientos de puntos de los diferentes eslabones constitutivos. Sobre el movimiento en las manivelas y el eslabón sopofie poco hay que decir, pero en cuanto al movimiento de los puntos de la biela y
del plano de trabajo asociado a ella se observa su gran complejidad. Podemos observar distintas f'ami-
lias de curvas: curvas lobulares de dif'erente cornplejidad. curvas con tramos casi rectilíneos, etc. Existen ¿rtlas de curvas de biela o de acoplador que nos permiten seleccionar la geometría del cuadrilátero
articulado que nos procura la curva más aproximada a la deseada. En la Figura l.2l se presenta un
mecanrsmo con las curvas de acoplador de una serie de puntos de diferentes eslabones.
Una aplicación muy interesante del cuadrilátero articulado es aquella que resulta de hacer la
rnanivela de salida de longitud infinita (degeneración de la manivela) y su conversión en una deslizadera rectilínea. El movimiento resultante de la biela se puede estudiar mediante los dos puntos
extrerros. El punto de la biela articulado con la manivela de entrada describe círculos. mientras que
el punto articulado con la deslizadera result¿inte de la degeneración describe una recta. Si la anterior
recta la alineamos de nranera que pase por el eje de entr¿rda y la deslizadera, esta última describe un
movimiento muy cercano al annónico. la componente arrnónica depencle del factor Rr.2l siendo R
cl radio del eje de entrada y L la longitud de la biela (rác.se la Figura 1.22).Para obtener un movi-
rniento annónico deberemos hacer lo rnás pequeño posible el factor anterior. un rnecrnismo que
cumple lo anterior es el denominado yugo escocés. en el clue la biela se hace de longitud infinita
(réase la Figura I .23).
Interferencia entre eslabones. Montaje
El estudio geométrico del movimiento realizado no considera los
problemas del montaje de los
mecanismos. Uno de los primeros problemas con que se encuentra uno al intentar materializar el
mecanismo desarroll¿ido es el de los cruces o interferencias entre los eslabones v eso lo deberemos
S-raraninfo
Introducción a la Teoría de Máquinas v Mecanismos
Figura 1.21. Curvas de acoplador: las cabezas de las manivelas describen circunferencias y los
de la biela 3 describen curvas cerradas tioo riñón, ocho, etc.
pu
19
ntos
Cuadrilátero articulado degenerado
cenlnco
/@
( o,^,
\r',r, ,D,
\o
Figura 1.22. Mecanismos biela manivela
céntrico. R es el radio de la manivela,
L es la longitud de la biela.
o
@
*-*'
Figura 1.23. Mecanismo: yugo escocés.
solusionar l'ecllniendo al concepto de plano de trabajo del eslabón. Definiremos convcnicnteutente
los planos de trabajo. uno por eslabón. para que el mecanismo f-uncione correctarnente. buscando en
muchos c¿lsos las simetrías y un orden de planos que disponga los eslabones de mayol' movilidad lcr
más separados posibles.
1.5.3
TÉCIruCnS DE ANÁLISIS DE MECANISMoS:
ANALíTICA, COMPLEJA, GRÁFICA
En este punto. deberemos analizar qué técnicas podemos utilizar para conocer lii posición y por tanto
la velocidad y aeeleración de cualquier punto del mecanismo. La aolicación de la cinemática del
@ ITES-Paraninfo
-:':J-cción a la Teoría de Máquinas v Mecanismos
.tilido rígido a los mecanismos es el cuerpo de conocimientos a aplicar. pero en Teoría de Máquiv Mecanismos vamos a desarrollar una serie de conceptos y técnicas que nos permitan un mhs
fácil y' rápido análisis y solución del estado de movimiento de cualquier eslabón y punto del mecanisrlo.
La utilización del cálculo de vectores para definir la posición de los eslabones de un mecanisnto. así como. de las velocidades y aceleraciones. nos permite considerar dos grupos de técnic¿rs:
lrs analíticas y las gráficas.
Las técnicas analíticas vectoriales utilizan el análisis',,ectorial de los bucles cerrados de los
e slabones del mecanismo para obtener ecuaciones vectoriales de la movilidad del mecanismo. De
nas
los sisterl¿rs de ecuaciones vectoriales planteados podemos pasar a sus correspondientes sistemas
dc ecuaciones escalares que mediante su resolución nos pemitan obtener las características de los
eslabones incógnita en función de los datos de la geometría del mecanismo.
Técnicas analíticas
Valt'tos a aplicar lo anterior al caso de un mecanismo fundamental, el cuadrilátero articulado, se-
cún la Figura
1.2r1.
X
----_>
Figura
1.24. Representación vectorial de un mecanismo
de cuatro barras
Siguiendo como referencia la notación utilizada, se observa que, evidentemente, la suma de
provecciones de las componentes vectoriales en el eje X debe ser cero:
L,.cosz-|L.'cosf
(l.l)
Lj.cosó+Lr-0
Además. la suma de las proyecciones de las componentes vectoriales en el eje
l¿is
I
tarnbién debe
ser cero:
l,, .sen y" * L..cos
Si las Ecuaciones
(l.l) y (1.2)
tl
se reorganizan
. cos2
lJ
-- (h.cos
L].sen] ll
Si las Ecuaciones
: fi+ fl+ |
-::-
)araninfo
(l
/
Lj.cos ó -
0
(1.2)
y se elevan al cuadrado resulta:
@ L, .cos t
: (h.sen / -
La)2
L, .sen z)2
(l
3)
(l ,l)
3) y (l.zl) se suman, el resultado sería:
L1.Lr.cos
(> L,.Lt.cosz.cos ó- L,.L.,.sen t.sen Q- L,. L*'cosa
(1.-5)
lntroducción a la Teoría de Máquinas y
Mecanismos
21
Para simplificar esta ecuación puede realizarse un cambio de variables con la siguiente asigna-
crón de parámetros:
:L^
Rr
L1
R2
:L^
Ll
R¡-
oi+ ri+ r1 -
¡2
L1
/-' L1' L1
Resultado del carnbio de variables de la Ecuación (1.5) es la expresión:
R' .cos
7"
-
Rt 'cos
@
* R, :
cos
(z
(
ó¡
1.6)
La Ecuación (1.6) es conocida como la EcLtoc'ión de Frettdenstein para los mecanismos de cuatro barras, probablemente la técnica de síntesis más utilizada en los problemas de diseño donde se
requiere el movimiento coordinado entre el eslabón de entrada y el de salida.
Técnicas analíticas: síntesis de Bloch
Otro método para hallar la posición. velocidad y aceleración de los puntos en los eslabones de un
mecanisno, podemos tarnbién utilizar otra técnica analítica basada en el álgebra de los números complejos. Una ventaja de esta técnica consiste en la facilidad de la diferenciación en el plano
complejo. El análisis pol componentes reales e imaginarias nos permitirá generar el conjunto de
ecuaciones que resuelven el problema.
La síntesis de Bloch consiste en satisfacer requisitos cinemáticos aplicando la técnica de los
números complejos. Por este procedimiento, conociendo las velocidades angulares (t,)., t,t. y ¿,r+) y
las aceleraciones angulares (e,, c-, y c.) de las barras 2, 3 y 4 de un cuadrilatero articulado como el
representado en la Fi-eura 1.24, se pueden calcular las dimensiones de las cuatro barras.
En efecto. si se consideran las barras como vectores y se hace uso de la forma compleia en
coordenadas polares, se obtiene:
L+L.+Lj+L+:0
L1.gJ"t
I
Lr.¿J(':
I
L..¿J'':
,L1)
I La.eJ,'t:e
Si la Ecuación (1.7) se deriva respecto al tiempo, resulta:
Lr.e)r.ej". + L. .{,)1' rr't' ¡ L,.t,tr.
¿,
1",
:
(1.8r
0
Si a su vez, la Ecuación (1.8) se deriva respecto al tiempo, se obtiene:
L..
(t:2 +
j
.
tt¡|.') .
ei". + L.. ( er + .j . ui) . ei". + La. (t:a + .j . rtfi) . ei".
Pasando las Ecuaciones (1.7).
Lt+L.
0lL..ot,
-
(le)
0
(l.B) y (1.9) a la forma vectorial, se obtiene:
*L.
*L1 'o-t¡
!L+
lLa.t'ta
O + L..(e: f j.r'l) -l L..(t1 + j .r,l) -l Lr.(t:a
:0
-0
+ .i .rtfi¡ : g
(
1.10)
@ ITES-Paraninfo
:: :^ a la Teoria
de Máquinas y Mecanismos
Si l¿ts Ecuaciones (1.10) se dividen pol L, se podrá calcular Lz, Lt.L.iL, y LtiLt. Aclernás. si
-J rorlsidera la longitud de la barra | (O.Ol conto l¿i Lrnidad (L,: l), se podrían obtener las lon-rtucles de un cuadr-ilátero semejante.
Tar-nbién. al hacer e I discrirninantc igual a la unidad (A : l). los vectores qlle se obtienen. al
resolver el sistema. serán ser.nejantes y apareccrán girados un mismo hngulo. Resumiendo: el nteeanismo ser'á homólogo al de referencia.
Resolviendo el sistenta de Ecuaciones (1.10). planteaclo anteriormente. resulta:
L,: -tL.+L.+Lr¡
L. : ,').,.(t;., * .j 'r'tt) - (,)j.(í)r + .j .t,l): (,)+.Íi-¡ -- (,):' t:t -l j ' (t)J' (t)t. ((t)z rDa)
L.: r,t..(r;* * i .r,rt) (,)1.(¿:2 + .j .t'É) - u)¡.r)1 (0r. t)¡ I .l . 02. trtr. (¡¡¡, - ¡,¡.)
Lr: t,t.'(¡;. -l-.¡ .r'tl) t,¡..(í:,,+ j.r'l): (t)t.i;2 (t)¡ . tt f J . (!)1. (t)2. (,)2 (r¡)
Los sistemas de ecu¿tciones obtenidos al resolvcr los mecanisn'los por sencillos que sean. genesistemas de ecu¿tciones no lineales de difícil lesolución. La utilización de mé1odos ntaterláticos de iteración, Newton Raphson, f acilita la solución introduciendo nurnerosos concepros nrarenráticos: número de iteraeiones. convergencia, error, ctc.
Existen en la bibliogt'afía nurnerosos [ítulos clue desarroll¿rn las técnicas analíticas. las cuales
finalntente scln intcgt'adas en progl'¿lmas de ordenadol en len-eua.jes comcl el Fortran o si¡nilares o
cn los paquetes dc sintulación más al,anzados Mathcad. Adams. etc.
t'¿rn
Técnicas gráficas
Ett cuanto a l¿rs técnicas gráficas, las quc v¿ul.ros ¿r clesarrollar y utilizar en el transcurso clc cste
tcrto. podetnos decir que utilizan la geornetría de los esl¿rbones cn conjunción con las propiedades
geontétricas cle las velocldades y acelelaciones para resolver el ploblema cinem¿itico del nrec¿ir.tisnro par¿i cada uno de los instantes de interés. Se utilizarír el álgebra vectolial y los conocimientos
tlc la -ueornetría descriptiva como base de la técnic¿t grífica.
Para concluir, podemos decir que las dos técnicas son complementarias siempre. El uso de las
técnic¿rs ¿rnalític¿is reqr,riere en muchos casos de las técnicas gráficas para validar las soluciones
cncontradas en las iteracioncs. Las tócnicas gráficas en el caso de rnceanisrnos con movirniento en
planos paralelos son en muchos casos de gran ayuda y permiten un anírlisis gráfico rápido y sencillo. generando i¡nas soluciones cinemáticas qlre nos permiten una rápida interrelación entre l¿is
rra-unitudes de los diversos puntos del mecanisrno. También será aplicable al carnpo de la dinárnica. permitiendo un rápido estudio cualitativo y cuantitativo de l¿t influenci¿i de las fuerzas sobre
cada eslabón y su interrelación con las de los otros eslabones del mecanisn'ro. En los CapítLrlos 2 y
3 se aplicar'án diversas técnicas -uráficas en la resolución de problernas de cinenrática y clin/rmica.
PnoeLeMAS RESUELToS
>
1.1
Encontrar los mecanismos que resultan de todas las inversiones con difcrcncia tooolósica de la
cadena cinemática de Stephenson (Figura 1.2-5).
Resolucró¡¡
Las correspondientes inversiones de la cadena cinemírtica cle Stephenson permiten obtener tantos
mecanismos cclmo miembros tenga. La solución se presenta en la Figura L26.
::-r:'aninfo
lntroducción a la Teoría de Máquinas v Mecanismos
23
Figura 1.25. Cadena cinemática de Stephenson.
La posición de tierra del eslabón zl es equivalente a la del eslabón 2, por simetría. Lo mislno
ocurre con la posición de tierra del eslabón 6. que es equivalente a la del -5.
/1\
\i/
Eslabón 1 = TIERRA
r¡
Eslabón 2 = TIERRA
c
Eslabón 3
=TIERRA
Eslabón 5 =TIERRA
Figura 1.26. Inversiones de la cadena cinemática de Steohenson.
@ ITES-Paraninfo
ltroducc¡ón a la Teoría de Máquinas v Mecanismos
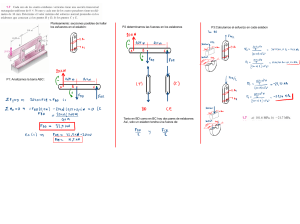
> 1 .2.
Calcular el núunero de grados de libertad del mecanismo de la Fisura L27.
Figura
1.27. Mecanismo pistón.
Resolucrótr¡
Se aplicará la fórmula de Grübler para el cálculo del número de grados de libertad del nrecanismo.
GDL
: 3(N l)
2Pr
- P,
(Fórmula de Kutzbach Gruebler. 2D)
Se calculan el número de pares de uno y de dos grados de libertad (Figura 1.28), en este caso
ha¡r 4 pares cle I GDL, de los cuales 3 son de rotación y uno de traslación.
repil :3(N l) 2P, P2:3(4-t) 2. 4-o: tr
sc trata de un mecanismo DESMODRÓVICO.
Figura
1.28. Posición de los pares de un grado de libertad.
el número de grados de libertad de los siguientes mecanismos.
De nuevo, se aplica la fórmula de Grübler, y pueden verse en ta Figura 1.27.
En los tres casos los pares son de un grado de libertad.
CalcLrlar
(A) I cnl l:3(N
Se tTata
- l)
2p,
-
p2:3(1-t)
2.
l0-0:
tr,
de una ESTRUCTURA HIPERESTÁTICA.
(B) repil:3(¡/
- r)
2p,
-
p2- 3(4-t) - 2. 4-0: [-1,
se trata cle un mecanismo DESMODRóH¡ICO.
(c)
rept--]
: 3(N t) - 2pt p::
3(11-1)
- 2 . t4-0 :A,
se trata de un mecanismo de DOS GRADOS DE LIBERTAD.
lntroducción a Ia Teoría de Máquinas v Mecanismos
A
()\
(a)
(c)
Figura
1.29. Mecanismos.
PE 3-4
PE 3.7
B
A
o\
Oz
(a)
@
PE89
PE 8,1
PE 6-
E
tel
\Y/
PE 4-5
@
PE 3-a
K
\1-l
Figura
B
"',áí
Os
',K
\t-l
v
PE 9.1
e
(c.,
1.30. Posición de los pares en los mecanismos.
@ ITES-Paraninfo
ltroducc¡ón a la Teoría de Máquinas y Mecanismos
> 1'4.
Calcular el número de graclos de libertad de los siguientes mecanismgs.
rodadura
+
deslizamiento
olu:
,fu7
r¡
v
/:\
\?
f
(a)
Figura
(A)
i GDL
l: 3(¡/- l) -
2p,
1.31. Mecanismos.
-p, :
3(3_t)
- 2. 2_l
-lrl
se trara de un mecanismo DESMODRóMCO.
(B) repil
: 3(¡/ - l)
2p,
- p):
3(1-t)
-2
3-l
: ffl
en este caso el PE 2-3 tiene 2 GDL.
Se trata de un mecanismo de DOS GRADOS DE LIBERTAD.
PE 1-2
J,6.to'
7nm
e
\O
o
(a)
Figura
1
.5.
1.32.
Utilizando la notación cle la Tabla
láteros.
a) L, : 80 mm L.: 40 mm
b) l' : 70 mrn t, :60 mm
c) l,, : 80 mm L" :60 mm
d) L' :40 mm L, : 60 mm
l-r:.aninfo
(b)
Pares: a) de 1 GDL 1-2, 2-3y 2 GDL 3-1; b) de 1 cDL 1-2, 3-4, 4-1 y 2 GDL2_3.
l.l,
especifica a qué clase pertenecen los siguientes cuadri_
: 60 mm
Zj :40 mm
L1 :60 mm
l', - 80 mm
L.,
La:70 mm
La: 60 mm
La:60 mm
La:90 mrn
lntroducción a la Teoría de Máouinas v
Mecanismos 27
Resolucró¡r
El procedimiento a seguir aparece representado en la Figura
a)
1.20.
En primer lugar, se comprueba si el mecanismo cumple el teorema de Grashof.
Lt+L1
Lt + L. - 80 + 60: 140
',!
L2+L1
L2+ L1:40 + 70:
Lt+h >
I l0
L2+L1
Se comprueba que se cumple el teorema de Grashof.
El siguiente paso es comprobar si las barras opuestas son iguales
(Lt: Lty Lz:
Lr); esta
condición no la cumple.
fijo (L,).
¿La barra menor es contigua a la tija? Esto sí que es cierto, puesto que el eslabón 2 se
¿La barra menor es fija? La barra menor es L2 y no se corresponde con el eslabón
encuenlra unido en h) con el eslabón L,.
Por lo tanto. se trata de un mecanismo de MANIVELA-BALANCIN.
b)
En primer lugar, se comprueba si el mecanismo cumple el teorema de Grashof.
Ll+Lj? b+L4
Lt + L':70 + 40: ll0
L. + Lt:60 + 60:
120
L.+L1 < L2+L1
Se comprueba que NO se cumple el teorema de Grashof.
Es un DOBLE BALANCIN.
c)
En primer lugar, se comprueba si el mecanismo cumple el teorema de Grashof.
Lt+Lj? L2+Ll
Lt + Lj:
B0
+ 60: 140
L2+ Lt:60 + 60:
Ll+L7>
120
L.lL+
Se comprueba que se cumple el Teorema de Grashof.
El siguiente paso es comprobar si las barras opuestas son iguales (Lt Lt y
l*); sólo
se cumple para el segundo caso.
¿La barra menor es fija? El eslabón fijo es el de mayor longitud.
¿La barra menor es contigua a la fija? Esto sí que es cierto. puesto que el eslabón 2 y el 4
:
se encuentran unidos con el eslabón 1,.
Por lo tanto. se trata de un mecanismo de
d)
Lz:
MANIVELA-BALANCÍN.
En primer lugar. se comprueba si el mecanismo cumple el Teorema de Crashof.
Lt+L|? L"+L1
Lt + L1:40 +
B0: 120
L2+
Lt+L1 < L2+L4
Se comprueba que NO se cumple el Teorema de Grashof.
Se trata de un mecanismo de DOBLE BALANCÍN.
L,:60
+
90:
150