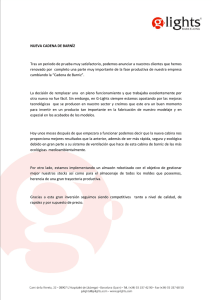
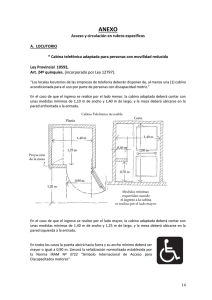
MANUAL USUARIO ESPAÑOL TARJETA DE CONTROL PLATAFORMA ELEVADORA SMART V3 V1.0.022A (Máx 4 paradas / Universal) Revisión 0 CÓDIGOS: SMART: Tarjeta de control para plataformas KIT CONNF-SMART: Equipo conectores femeninos para tarjeta Smart LAYOUT V3 105 mm 95 mm EXC ALT CS CT TS TD TG TA OM CRP CP AP EXC ALT CS PCP/KI CP AP TG TD TS NORMALE CH. MANUALI CH. AUTOMATICHE MANUTENZIONE DIFETTI PRESET IMP. STANDARD ALTRE FUNZ. DATO UP SPEEDY DOWN PAP /DI A- A A+ SA/RES SAR/AR FD/PDM FS/PSM APG Seriale TTL TM INT CM A B C APA ICV IF RD RS 7 6 5 4 3 2 1 0 CL GND VIM BAT D RU VB SNR OCC Power 4 mm 198 mm EM MAN CS1 FS3 CCS 188 mm CPP TSD SELECT SUMARIO 1. SEÑALIZACIÓN DE AVERÍAS .................................................. 1 1.1 1.2 1.3 1.4 1.5 1.6 2. Descripción .................................................................................... 1 Clasificación de las averías .............................................................. 1 Lectura de las averías ..................................................................... 1 Supresión total de la lista de averías ............................................... 1 Tabla de las averías ....................................................................... 2 Informaciones inmediatas ............................................................... 3 PROGRAMACIÓN DE LA TARJETA .......................................... 4 2.1 2.2 2.3 2.4 2.5 2.5.1 3. Tabla “Funciones programables” ..................................................... 4 Tabla “Tiempos programables” ....................................................... 5 Tabla “Parámetros programables” ................................................... 6 Tablas de la programación por defecto ............................................ 7 Entradas y salidas programables (0/7)............................................. 8 Llamadas en paralelo ............................................................................................ 8 TECLADO MULTIFUNCIÓN INTEGRADO ................................ 9 3.1 Pulsador DATO ............................................................................ 10 3.2 Pulsador SPEEDY ......................................................................... 10 3.3 Pulsador UP ................................................................................. 10 3.4 Pulsador DOWN ........................................................................... 10 3.5 Pulsador SELECT .......................................................................... 11 3.6 PROGRAMACIÓN POR ORDENADOR .............................................. 11 3.7 PROTECCIÓN DE ESCRITURA DE LA PROGRAMACIÓN MEDIANTE CONTRASEÑA ....................................................................................... 12 4. ESPECIFICACIONES DE LA TARJETA .................................... 13 4.1 4.2 Especificaciones Generales ........................................................... 13 Especificaciones eléctricas ............................................................ 13 4.3 Resumen del esquema alambrico (plataforma elevadora) ............... 14 4.2.1 4.2.2 4.2.3 5. 5.1 5.2 5.3 5.4 5.5 5.6 5.7 Alimentaciones ................................................................................................... 13 Entradas ............................................................................................................ 13 Salidas ............................................................................................................... 13 DESCRIPCIÓN DE LAS CONEXIONES .................................... 15 0-7 .............................................................................................. 15 A / B / C /D ................................................................................. 15 A- / A+ / AR / RES / SA / SAR....................................................... 15 ALT ............................................................................................. 16 AP / CP / CRP .............................................................................. 16 APA ............................................................................................. 16 APG............................................................................................. 16 i 5.8 5.9 5.10 5.11 5.12 5.13 5.14 5.15 5.16 5.17 5.18 5.19 5.20 5.21 5.22 5.23 5.24 5.25 5.26 5.27 5.28 5.29 5.30 5.31 5.32 5.33 5.34 5.35 5.36 5.37 BAT ............................................................................................. 16 CCS ............................................................................................. 17 CL ............................................................................................... 17 PCP / KI - PAP / DI .................................................................... 17 CPP ............................................................................................. 17 CM .............................................................................................. 17 CS ............................................................................................... 17 CS1 ............................................................................................. 18 CT ............................................................................................... 18 EM .............................................................................................. 18 EXC ............................................................................................. 18 FS3 ............................................................................................. 18 GND ............................................................................................ 18 ICV / IF ....................................................................................... 19 INT ............................................................................................. 19 MAN ............................................................................................ 19 OCC ............................................................................................ 19 OM .............................................................................................. 19 PDM / FD - PSM / FS .................................................................. 19 RD / RS ....................................................................................... 20 RU .............................................................................................. 20 TA ............................................................................................... 20 TD / TS ....................................................................................... 20 TG .............................................................................................. 20 TM .............................................................................................. 20 TSD............................................................................................. 20 VB ............................................................................................... 21 VIM ............................................................................................. 21 SNR ............................................................................................ 21 Indicación de LED ........................................................................ 21 5.37.1 6. Led PWR ........................................................................................................ 21 CARACTERÍSTICAS DE LA INSTALACIÓN .............................. 22 6.1 6.2 6.3 6.4 6.5 6.6 6.7 6.8 6.8.1 6.8.2 Batería ........................................................................................ 22 Conexión serial o paralela ............................................................. 23 Disposición de los sensores magnéticos de piso y de desaceleración 23 Parada retardada ......................................................................... 26 Fotocélulas y costas móviles ......................................................... 27 Gong ........................................................................................... 27 Patín retráctil ............................................................................... 27 Puertas........................................................................................ 27 Puertas manuales / Puertas automáticas (misma programación) ............................. 27 Puertas Semi-Automáticas ................................................................................... 27 ii 6.8.3 6.8.4 Estacionamiento con puertas abiertas o cerrdas .................................................... 27 Accesos múltiples ............................................................................................... 28 6.9 Pruebas de Final de Recorrido ....................................................... 28 6.10 Estacionamento ........................................................................... 29 6.10.1 Reenvío por estacionamiento ........................................................................... 29 6.12.1 Hombre Presente / Universal ............................................................................ 29 6.13.1 6.13.2 6.13.3 Una velocidad ................................................................................................. 30 Dos velocidades (arranque directo) ................................................................... 31 Dos velocidades (arranque estrella - triángulo) .................................................. 31 6.11 Temporizadores ........................................................................... 29 6.12 Tipo de instalación: PLATAFORMA ELEVADORA.............................. 29 6.13 Velocidad..................................................................................... 30 6.14 Mayor tiempo de espera para cargar / descargar mercancías en la cabina. ................................................................................................. 31 7. CONTROLES ....................................................................... 32 7.1 7.2 7.3 7.4 8. Circuito de seguridad.................................................................... 32 Máximo recorrido ......................................................................... 32 Temperatura del motor ................................................................ 32 Zona de puertas........................................................................... 32 SEÑALIZACIONES ............................................................... 33 8.1 Posición / Llegada / Reserva ......................................................... 33 8.2 8.3 Dirección ..................................................................................... 33 Ocupado...................................................................................... 34 8.1.1 8.1.2 8.1.3 9. 9.1 9.2 9.3 MANIOBRAS ....................................................................... 35 9.3.1 9.4 9.5 9.6 9.7 9.7.1 10. Indicación de POSICIÓN ...................................................................................... 33 Pisos Subterráneos ............................................................................................. 33 Indicación de LLEGADA ....................................................................................... 33 Autonivelación ............................................................................. 35 Emergencia ................................................................................. 35 Gestión de la plataforma............................................................... 36 Gestión fosa y cabeza reducida ............................................................................ 36 Maniobra de montaje (mantenimiento) .......................................... 36 Mantenimiento ............................................................................. 36 SINCRONIZACIÓN ........................................................................ 37 Bomberos .................................................................................... 37 Maniobra bomberos ............................................................................................ 37 EXPANSIONES SERIALES ................................................. 38 10.1 Esquema de conexión serial (hasta 4 pisos) ................................... 38 10.2 CABLAJE ...................................................................................... 39 10.3 Seriales de cabina ........................................................................ 40 10.3.1 TARJETA SERIAL, DIRECCIÓN 0 ....................................................................... 40 10.4 Seriales Externas para llamada externas ........................................ 41 iii 1. SEÑALIZACIÓN DE AVERÍAS 1.1 DESCRIPCIÓN La presencia de una avería será indicada con el respectivo código intermitente en el visualizador y será memorizado si permanece por más de dos segundos. La tarjeta puede memorizar hasta un máximo de 32 averías, luego sigue sobrescriviendo las menos recientes. En el caso de montaje errado del microcontrolador en el zócalo, el visualizador y las salidas de la tarjeta permanecen apagados, mientras que en el caso de cortocircuito en las salidas de transistor, estas parpadean. 1.2 CLASIFICACIÓN DE LAS AVERÍAS Las averías se clasifican en tres categorías (A, B, C) en función de su efecto en la instalación. A continuación se describe cada categoría. CATEGORÍA DE AVERÍA A B C DESCRIPCIÓN Instalación en bloqueo permanente con respectivo código intermitente. Con el código intermitente no se acepta ninguna llamada. El bloqueo permanece incluso si se ha desactivado la red. Mantenga pulsada la tecla SPEEDY por 3 segundos para desbloquear la instalación o pasar a la programación y vuelva a configurar 0 en la dirección 41, o ponga la instalación en mantenimiento. Instalación en bloqueo mientras la avería persiste. Las llamadas son aceptadas incluso con el código intermitente. Código intermitente hasta la llamada siguiente, o la desactivación de la red, o la presión del pulsador SPEEDY. Errores de programación. No se almacenan en el histórico de las averías. Inserción de valores no válidos en fase de programación. Programación en bloqueo por 2 segundos con indicación de código fijo y del respectivo error de programación. Se mantiene el valor que se había guardado, bloqueando la memorización del no válido. Las averías de tipo A y B bloquean el servicio en curso e impiden el movimiento de la cabina mientras persisten las condiciones anormales en la instalación. 1.3 LECTURA DE LAS AVERÍAS Para leer las últimas 32 averías memorizadas es necesario pulsar simultáneamente las dos teclas SPEEDY y DATO Véase parrafo 3. (No funciona en el menú “PRESET”) Para visualizar la avería es necesario mantener pulsadas las dos teclas por lo menos por 1 segundo. Una vez que aparece el código, soltarlas por lo menos por 1 segundo, y de esta forma se suprime la avería. El número 99 indica que la lectura se ha completado. Las averías son visualizadas desde la última, en orden de tiempo. 1.4 SUPRESIÓN TOTAL DE LA LISTA DE AVERÍAS Para suprimir con una sola operación todas las averías de la lista, Véase párrafo 3, debe mantenerse pulsada la tecla SPEEDY y dar tres golpes al pulsador DATO, haciendo intervalos de por lo menos medio segundo y, a la tercera presión, mantenerlas pulsadas hasta la visualización de ‘99’. No funciona en el menú “PRESET”. 1 1.5 TABLA DE LAS AVERÍAS CÓDIGO DE CATEGORÍA AVERÍA DE AVERÍA 0–3 B 37 B 38 B 39 B 40 B 41 42 44 (**) 45 46 (**) 47 (**) B B B B B B 51 (**) B 52 (**) B 53 (**) B 55 B/A 56 B 57 A 58 C 59 C 62 64 B B 68 B 80 A 81 A 82 83 A A C 85-86-87(*) DESCRIPCIÓN DE LA AVERÍA Véanse párrafos Fallida partida debida al contacto de seguridad defectuoso o a la apertura del contacto de seguridad durante el recorrido y el operador no ha logrado cerrar las puertas. 5.14 CS En caso de conexión de los bloques de la puerta del piso entre CS y CT, la avería de partida fallida ocurre si CPP y TSD se cierran simultáneamente (a GND) durante la marcha. Falta de congruencia entre los impulsores IF , ICV con el impulsor de la zona de puertas (APA), 5.6 APA IF o ICV en avería o APA en avería. 5.21 ICV/IF Fallido conteo de los pisos en subida. Los impulsores IF/DB o ICV/DA no conmutan correctamente o número de pisos errado (dirección 32 mayor que los pisos efectivos). 5.21 ICV/IF Parada en los pisos extremos. Fallido conteo de los pisos en bajada. Los impulsores DB o DA no conmutan correctamente o número de pisos errado (dirección 32 mayor que los pisos efectivos). 5.21 ICV/IF Parada en los pisos extremos. Zona de parada no encontrada: errada disposición de los magnetos o IF en avería (sia 5.21 ICV/IF lconfiguración es IF/ICV) Impulsores DRS o DRD siempre abiertos o conexiones interrumpidas. 5.27 RD/RS Zona de parada demasiado corta o retardo de parada demasiado largo (dirección 26) 6.4 Parada retardada Teleruptor de gran velocidad (OFF en parada) 5.7 APG Fallida partida durante el procedimiento de sincronización. 5.14 CS Telerruptor de pequeña velocidad (OFF en parada) 5.12 CPP Telerruptores de subida o bajada empastados. (OFF en parada) 5.33 TSD Bobina del telerruptor de bajada en avería o conexiones interrumpidas. (ON en marcha) 5.16 CT 5.33 TSD Bobina del telerruptor de subida en avería o conexiones interrumpidas. (ON en marcha) CT TSD Bobina del telerruptor pequeña velocidad en avería o conexiones interrumpidas. (ON en marcha) 5.12 CPP DRD siempre cerrado, o entrada RD siempre en masa o número de pisos errado (dirección 32 5.27 RD menor que los pisos efectivos). A la segunda avería consecutiva, el bloqueo es permanente. Motor en térmico. 7.3 Temp. Motor 5.32 TM En normal → Fallida conmutación de la entrada FS3 del piso más bajo (RD) al más alto (RS). 5.19 FS3 En programación → Parámetros protegidos por contraseña. Valor configurado no válido durante la programación de las funciones. 3 Modalidad Se mantiene el valor memorizado. Programación Número de paradas de la instalación no válido (> 4 o < 2). Se mantiene el valor memorizado. 3 Modalidad Programación Serial avería o conexiones interrumpidas. (No dirección 0 en la tarjeta de cabina) … Cambio de velocidad no efectuado (APG off, durante la desaceleración) 5.7 APG Señalización de cortocircuito o sobrecarga en las salidas (BAT, VIM, A, B, C, D, RU, VB, SNR, … OCC) Tiempo de máximo recorrido acabado. 7.2 Máximo Recorrido 5.8 BAT 5.17 EM Instalación en margen de recorrido. 5.18 EXC 5.27 RD/RS Autonivelación defectuosa. Tiempo máximo de autonivelación. 9.1 Autonivelación Circuito de seguridad defectuoso. Control en CS1. 5.15 CS1 Memoria defectuosa (solo en programación). Imposible memorizar las nuevas impostaciones. 3 Modalidad Programación Error de sistema – error de memoria Intentado acceso al compartimento elevador. Se activa desactivando: - la entrada de mantenimiento “MAN” 9.4.1 Gestión pozo y - la modalidad “MANUTENCIÓN” por el teclado cabeza reducida - entrada “AR” (si al parámetro 1 está configurado el valor 4 o 12) 88 A … … … 90 (*) 91 (*) 92 (*) 93 (*) 94 (*) 95 (*) 98 (*) B B B B B B B Reset de sistema – WDT Timeout Reset de sistema – Brownout Reset de sistema – MCLR from run Reset de sistema – MCLR from sleep Reset de sistema – WDT from sleep Reset de sistema – RST Instruction Reset de sistema (*) Las alarmas 85, 86, 87, 90, 91, 92, 93, 94, 95 e 98 se refieren a la diagnóstica de la tarjeta misma. En caso de intervención de una de estas alarmas es necesario indicar inmediatamente el problema. 2 1.6 INFORMACIONES INMEDIATAS Durante el funcionamiento normal de la instalación es posible visualizar el estado activo de las siguientes señales pulsando DATA, por medio de los siguientes códigos: En el caso de más señales activos tiene prioridad el código más bajo. Entonces el código 41 tiene prioridad sobre todos los otros códigos. CÓDIGO 0-3 41 42 43 44 45 48 49 50 51 52 53 54 57 60 62 63 64 65 66 67 68 69 70 DESCRIPCIÓN Falta de expansión serial al piso XX (0 = piso más bajo) ALT pulsado. * Fotocélula oscurecida (CM). ** Pulsador de apertura de la puerta pulsado (PAP). Pulsador de cierre de la puerta pulsado (PCP). **Sobrecarga (CCS). Pulsador de alarma (AA) Emergencia (EM) Pulsador de subida mantenimiento pulsado (PSM). Pulsador de bajada mantenimiento pulsado (PDM). Mantenimiento (MAN). Maniobra bomberos Maniobra interna Cargar / descargar mercancías Conteo finalizado (dir.47,48,49 = 00) Instalación en marcha cuesta abajo de alta velocidad Instalación en marcha cuesta arriba de alta velocidad Instalación en marcha cuesta abajo de baja velocidad Instalación en marcha cuesta arriba de baja velocidad Cierre puertas lado 1 Apertura puertas lado 1 Cierre puertas lado 2 Apertura puertas lado 2 Ocupado NOTAS: • El código 42 (CM activo) es visible incluso a puertas cerradas. •• Los códigos 43 (PAP) y 45 (CCS) no se activan mientras la instalación está en movimiento. 3 2. PROGRAMACIÓN DE LA TARJETA 2.1 TABLA “FUNCIONES PROGRAMABLES” DIRECCIÓN VALOR 8 16 0 No Bip en pulsador en cabina (Bip desactivado en la salida “SNR” y en la pantalla serial de cabina) Bip en pulsador en cabina (Bip activado en la salida “SNR” y en la pantalla serial de cabina) Estacionamiento PUERTAS ABIERTAS Ley 13 paralela desactivada: (CS OFF) A+/A-= Entada Allarma Activa Estacionamiento PUERTAS CERRADAS RES/SA= Entrada reset error y ley 13 / Salida GONG; (CS ON) AR/SAR= Entrada acceso hueco del ascensor, bloqueo instalación con avería 88/ Salida señalización acceso hueco del ascensor. DATO: Tecla señalización Alarma Recibida * Señalización alarma activa y recibida disponible en las instalaciones seriales. Estacionamiento PUERTAS ABIERTAS Ley 13 paralela activada: (CS OFF) A+/A- = Entrada Allarma activa Estacionamiento PUERTAS CERRADAS RES/SA = Entrada reset error y ley 13 / Salida señalización Alarma Activa; (CS ON) AR/SAR = Salida señalización Alarma Recibida RESERVA RESERVA Parada obligada en los sensores de Mantenimiento en alta velocidad sincronización en mantenimiento Parada obligada en los sensores de Mantenimiento en baja velocidad sincronización en mantenimiento Parada en los pisos extremos en Mantenimiento en alta velocidad, baja en los mantenimiento sensores de sincronización Parada en los pisos extremos en Mantenimiento en baja velocidad mantenimiento Llegada a luz fija ▪ Señalización de ocupado en las luminosas de las llamadas de piso; ▪ En las llamadas de cabina (luminosas); o Si dir. 8=0→ Señalización de la posición (NO llegada); o Si dir. 8=1→ Señalización de llegada de luz fija (NO posición) Llegada a luz parpadeante ▪ Señalización de ocupado + llegada parpadeante, en las luminosas de las llamadas de piso; ▪ En las llamadas de cabina (luminosas); o Si dir. 8=0→ Señalización de la posición parpadeante (SI posición); o Si dir. 8=1→ Señalización de llegada parpadeante (NO posición) RESERVA RESERVA Llegada + Posición (Salidas seriales de tipo A) Véase parámetro 5 Llegada y Posición separadas (Salidas seriales de tipo B) Véase parámetro 5 RESERVA Indicación de alarma activa en seriales piso ITF850-SER / LCD600 Indicación “Presente” en seriales piso ITF850-SER / LCD600 Conexión serial desactivada Conexión serial activada Reenvío al piso 0 después de 14 minutos (solo instalación hidráulica) No reenvío al piso 0 después de 14 minutos (solo instalación hidráulica) RESERVA RESERVA IF/ICV abiertos al piso 64 IF/ICV cerrados al piso 1 0 3 8 1 4 12 2 3 0 0 0 1 4 2 3 4 5 6 7 8 9 10 11 12 13 14 15 DESCRIPCIÓN 12 16 0 0 1 8 0 32 0 64 2 3 Véase Párrafo 5.36 SNR 6.10 Estacionamiento 9.5 Mantenimiento 6.6 Gong 10 Conexión Serial 6.8 Puertas, 7.13 Reenvio para Estacionamiento 6.3 Disposición Sensores Magneticos de Pisos y de desaceleración 4 2.2 TABLA “TIEMPOS PROGRAMABLES” DIRECCIÓN VALORES LÍMITE LABEL DESCRIPCIÓN Espera con puertas abiertas RESERVA RESERVA RESERVA Duración impulso gong. ( 0 = GONG y apertura puertas desactivados, salida AP = señalización alarma activa ) Tiempo fallida partida y control en dispositivos de reapertura. • Con una llamada activa, si CS no se cierra dentro del tiempo programado, la tarjeta señala el error de fallada salida; 16 17 18 19 2 – 45 seg. 2 – 45 seg. 2 – 45 seg. 2 – 99 déc. TAP TOP TCH TRA 20 0 – 99 déc. TIG 21 10 – 99 seg. TMP 22 10 – 99 seg. TMC 23 1 – 99 déc. RCPV 24 10 – 90 seg TOC 25 26 0 – 99 déc. 0 – 99 déc. TST TRIF 27 1 – 99 x 10 seg. TSN 28 0 – 99 min. SBA 29 0 – 99 déc. CHF 30 0 – 99 ség. RIP 31 0 – 99 déc. L13 Véase párrafo 6.6 Gong 5.14 CS • Con una llamada activa si CS está cerrado pero CT abierto, los contactores (CPP y TSD ON) no se activan después de 1 segundo, la tarjeta señala el error de fallada salida. Tiempo máximo recorrido. Desde 0 hasta 9 → No utilizado [Valor por defecto = 80 seg.] Desde 10 hasta 80 → Desde 10 hasta 80 segundos Desde 81 hasta 98 → 81=90 seg, 82=100 seg, 83=110seg…. 98=260 seg 99→Infinito. RESERVA Tiempo por el cual el ocupado permanece encendido después del inicio del cierre de las puertas (salida OCC en paralelo y en serial, y ocupado en las teclas de piso) Es posible retrasar aún más la salida OCC (tanto en serie como en paralelo) Véase el parámetro 27. RESERVA Retardo parada por intervención impulsores zona parada (IF y ICV) - Espera del apagado del ocupado antes de regresar la cabina al piso programado en la dirección 34. - Si se programa un valor “par”, retraso de la salida OCC después del tiempo programado al parámetro 24 (TOC), 02=20 seg, 03=0seg, 04=40seg, 05=0seg... Tiempo de separación de la batería después de la activación del emergencia (entrada EM): 0-97 = tiempo (de 1 a 97 min.) y automático (Vbat <10Vdc); 98 = Solo automático (Vbat <10Vdc); 99 = Sin separación. 96 = Maniobra bomberos en la entrada FS3 (piso bomberos en el parámetro 39) Señalización de cabina en el piso, en salida VB; 98 = Maniobra bomberos en la entrada FS3 (piso bomberos en el parámetro 39) Salida VB para soft stop; 99 = Control de un contacto importante en la entrada FS3. Salida VB para soft stop Tiempo máximo de autonivelación (0 → Control deshabilitado) 0-89 = temporizador "TMR1" entre CS1 y RU; 90-95 = Salida RU, función "TA", activada con TS / TD; 96 = Salida RU, habilitación de autonivelación (ON durante la autonivelación) 97 = Salida RU, función lógica "or" de IF e ICV (OFF, solo si ambos OFF) 98 = Activación del circuito de seguridad (RU, ON→APA + IF o APA + ICV); 99 = RESERVA 7.2 Máximo Recorrido 6.8 Puertas 8.4 Ocupado 5.14 CS 6.10 Estacionamiento 6.1 Batería 5.17 FS3 6.11 Temporizadores 9.7 Bomberos 9.1 Autonivelación 5.15 CS1 5.28 RU 6.11 Temporizadores 5 2.3 TABLA “PARÁMETROS PROGRAMABLES” DIRECCIÓN VALORES LABEL LÍMITE 32 33 2–4 0 – 78 NP NS 34 0 – 32 NST 35 36-37 0 – 32 0 – 32 PB1 SPA1 38 0 – 31 EIS 39 40 41 42 43 0 – 99 0 – 32 0 - 98 0 – 32 0 – 32 NPM PB2 SBL PB3 PPE 44 0 – 99 RITUSC 45 0 – 99 RITING 46 47 48 49 50 51 52 53 54 55 56 57 58-59 0 – 99 0 – 99 0 – 99 90 1–3 1–3 1–3 1–3 ------ LETT DU MC CDM POR0 POR1 POR2 POR3 POR4 POR5 POR6 POR7 POR8-9 60 61 62 20 00 – 99 0 - 99 NUMCH CESER NSEC 63 43-47 MISC 64 0-40 … 97 0-99 … 98 0-99 … 99 0-99 … DESCRIPCIÓN Número de pisos totales de la instalación Pisos subterráneos Piso de estacionamiento (Reenvío después del tiempo programado en la dirección 27) Piso bajo (distancia de interpiso menor del normal) RESERVA Impulsores excluidos de la serial cabina (Véase Manual Usuario Tarjetas Seriales) 0 = ninguno, 1 = RS, 2 = RD, 4 = ICV, 8 = IF, 16 = CM, +16 = CM en paralelo o en serial No + 16 = CM en paralelo y en serial Sumas = más impulsores simultáneamente) Piso de bomberos (Véase maniobra ‘Bomberos’) RESERVA Código de desbloqueo (Si 0 instalación en bloqueo) RESERVA Piso de reenvío en emergencia (solo en bajada) (Décimos de segundo) Retardo controles conmutación telerruptores TS, TD, TP, TG, RCP, RAP. (Décimos de segundo) Retardo en las entradas de control EXC, ALT, CS, RD, RS, TSD, APG, CPP, EM, CS1 y retardo de inversión sentido de marcha. (Centésimos de segundo) Retardo en las entradas de llamada (serial y paralelo) Decenas / Unidades de las horas de encendido / recorridos Millares / Centenas de las horas de encendido / recorridos Centenas / Decenas de miles del número de horas de encendido / recorridos Lado apertura puertas en la parada 0 Lado apertura puertas en la parada 1 Lado apertura puertas en la parada 2 Lado apertura puertas en la parada 3 Reservas Reservas Reservas Reservas Reservas (1 = Primer acceso, 2 = Segundo acceso, Sumas = Varios accesos selectivos en la misma parada, por ejemplo en el piso 0 hay dos accesos y es necesario programar en la dirección 50 = 3 (1 + 2). RESERVA Gestión de llamadas por tarjetas seriales (véase Manual del usuario - Tarjetas Seriales) 2 = Exclusión de seriales de piso (ITF400, SERCAR, LCD56X...) 4 = Conexión de cabina (paralela) 16 = Codifica un cable por piso en A,B,C,D, (hasta 4 pisos), exclusión doble acceso; 32 = Codifica A,B,C,D binaria, de otro modo como bianario negado. Sumas = varias modalidades simultáneamente 1 = Entrada local MAN n.c. 2 = Exclusión sonda ptc 4 = Habilitación control circuito seguridad (CS1) 8 = Entrada APA zona autonivelación (Z) 16 = Autonivelación con puertas abiertas y incluso con puertas cerradas (siempre). No + 16 con puertas cerradas (siempre) y con puertas abiertas, y con puertas abiertas solo en subida. 32 = Entrada local CCS n.c. Sumas = varias modalidades simultáneamente 43 = Modalidad Hombre-presente 47 = Maniobra de hombre presente en cabina y universal a los pisos 0 = Cuenta horas en los parámetros 47-48-49 8 =Habilitación cuenta atrás recorridos programados, par. 47/48/49; 16= Cargar / descargar mercancías; 40 = Habilitación conteo de los recorridos programados, 47/48/49 0-98 = Diagnóstico de entradas / salidas, en modo "DEFECTOS" 99 = Funcionamiento normal 0 = Llamadas normales; 1=Activación llamadas automáticas en maiobra universal (solo para test) 0 = Funcionamiento normal; 1 = Activa el modo de simulación (solo tarjeta alimentada); 2 = Activa el modo de ensayo (solo salidas forzadas) ¡ATENCIÓN! 99 = Reinicio EEPROM; Véase párrafo 8.1.2 Pisos Subterráneos 6.10 Estacionamiento 10 Conexiones a la tarjeta serial 9.7 Bomberos … 9.2 Emergencia 6.8 Puertas 7.1 Circuito de Seguridad 9.5 Mantenimiento … 2.5 Entradas / Salidas Programables, 5.2 A/B/C/D, 8.1 Posición / Llegada / Reserva, 10 Conexón Serial 7.1 Circuito de seguridad , 7.3 Temperatura Motor, 9.1 Autonivelación 9.3 Gestión Plataforma … 2.4 Por defecto 6 2.4 TABLAS DE LA PROGRAMACIÓN POR DEFECTO En estas tablas se resume la programación por defecto con la que se proporciona la tarjeta. PARÁMETRO VALOR 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50-59 60 61 62 63 64 65-79 80 81-96 97 98 99 01 08 00 00 02 04 16 00 01 08 32 64 01 08 16 64 04 08 08 04 20 30 80 01 09 70 00 99 60 96 12 97 04 10 32 32 32 32 31 00 32 00 32 32 15 06 05 00 00 90 01 20 22 24 47 00 00 99 00 99 00 00 7 2.5 ENTRADAS Y SALIDAS PROGRAMABLES (0/7) En la tarjeta están presentes 8 I/O (E/S) multiplexados programables necesarios para coleccionar llamadas y proporcionar señales luminosas. Estos 8 I/O están en los bornes 0-7 de la tarjeta cuadro. El mapa de estos 8 I/O depende del número de paradas y del tipo de instalación que se quiere realizar. 2.5.1 Llamadas en paralelo En la tabla siguiente se representan las posibles configuraciones de los 8 I/O programables y la respectiva programación a efectuar en la tarjeta cuadro para instalaciones en maniobra universal / hombre presente. EN LOS PISOS: SEÑALIZACIÓN DE OCUPADO EN CABINA: POSICIÓN I/O TARJETA 0 1 2 3 4 5 6 7 EN LOS PISOS: SEÑALIZACIÓN DE OCUPADO EN CABINA: LLEGADA (LUZ FIJA) PROGRAMACIÓN: PAR 05=04 PAR 08=00 SOLO SOLO EXTERNAS CABINA (Dir.61 +0) (Dir.61 +2) EXTERNAS Y CABINA (Dir.61 +4) I/O TARJETA CE0 / OCC CE1 / OCC CE2 / OCC CE3 / OCC ----- CE0 / OCC CE1 / OCC CE2 / OCC CE3 / OCC C0 / PDM / P0 C1 / PSM / P1 C2 / P2 C3 / P3 0 1 2 3 4 5 6 7 C0 / PDM / P0 C1 / PSM / P1 C2 / P2 C3 / P3 ----- EN LOS PISOS: SEÑALIZACIÓN OCUPADO + LLEGADA EN CABINA: POSICIÓN + LLEGADA (INTERMITENTE) I/O TARJETA 0 1 2 3 4 5 6 7 PROGRAMACIÓN: PAR 05=12 PAR 08=00 SOLO SOLO EXTERNAS CABINA (Dir.61 +0) (Dir.61 +2) EXTERNAS Y CABINA (Dir.61 +4) CE0 / OCC / A0 C0/PDM/P0/A0 CE0 / OCC / A0 CE1 / OCC / A1 C1/PSM/P1/A1 CE1 / OCC / A1 CE2 / OCC / A2 C2 / P2 / A2 CE2 / OCC / A2 CE3 / OCC / A3 C3 / P3 / A3 CE3 / OCC / A3 ----- ----- PROGRAMACIÓN: PAR 05=04 PAR 08=01 SOLO SOLO EXTERNAS CABINA (Dir.61 +0) (Dir.61 +2) CE0 / OCC C0 / PDM / A0 CE1 / OCC C1 / PSM / A1 CE2 / OCC C2 / A2 CE3 / OCC C3 / A3 --------- EXTERNAS Y CABINA (Dir.61 +4) CE0 / OCC CE1 / OCC CE2 / OCC CE3 / OCC C0 / PDM / A0 C1 / PSM / A1 C2 / A2 C3 / A3 EN LOS PISOS: OCUPADO + LLEGADA EN CABINA: LLEGADA (INTERMITENTE) I/O TARJETA C0 /PDM/P0/A0 C1/PSM/P1/A1 C2 / P2 / A2 C3 / P3 / A3 0 1 2 3 4 5 6 7 PROGRAMACIÓN: PAR 05=12 PAR 08=01 SOLO SOLO EXTERNAS CABINA (Dir.61 +0) (Dir.61 +2) CE0/OCC/A0 C0/PDM/ A0 CE1/OCC/A1 C1/PSM A1 CE2 /OCC/A2 C2 / A2 CE3 /OCC/A3 C3 / A3 --------- EXTERNAS Y CABINA (Dir.61 +4) CE0 /OCC/A0 CE1/OCC/A1 CE2/OCC/A2 CE3/OCC/A3 C0 / PDM / A0 C1 / PSM / A1 C2 / A2 C3 / A3 LEYENDA: FUNCIÓN ENTRADA: Cn = Pulsador de llamada al piso n-esimo puesto en cabina. CEn = Pulsador de llamada externa al piso n-esimo. FUNCIÓN SALIDA: An = Luz de llegada al piso n-esimo. Pn = Luz de posición cabina n-esima. OCC = Segnalazione di occupato. PSM/PDM = Pulsador subida / bajada mantenimiento (se activa solo si el mantenimiento está activo); NOTA: Las mismas funciones están disponibles para aparatos seriales. 8 3. TECLADO MULTIFUNCIÓN INTEGRADO Scroll down mode +DOWN SELECT Scroll up mode + SELECT UP NORMALE CH. MANUALI CH. AUTOMATICHE MANUTENZIONE DIFETTI PRESET IMP. STANDARD ALTRE FUNZ. MODALITA NORMALE CH. MANUALI CH. AUTOMATICHE MANUTENZIONE DIFETTI PRESET IMP. STANDARD ALTRE FUNZ. DATO SPEEDY UP DOWN SELECT -0, MODALIDAD NORMAL: El visualizador puede mostrar la información contenida en el dibujo a continuación. La misma visualización es valida también para las modalidades: LLAMADAS MANUALES (CH. MANUALI) / LLAMADAS AUTOMATICAS (CH. AUTOMATICHE) / MANTENIMIENTO (MANUTENZIONE). Permite la visualización y la surpesión de las averías guardadas en la tarjeta. Véase párrafo 1.3. Si en la posición del piso actual el 0 parpadea, significa que la instalación debe sincronizarse. P iso d e destin o (Int ermit ente ) E st ado de la ent rada IF Detenido =desacti vo E ncendido=acti vo P iso act ual E sta do de la ent rada ICV Detenido =des acti vo E ncendido =acti vo -1, MODALIDAD LLAMADAS MANUALES: Permite efectuar llamadas a los pisos extremos de la instalación a través de los pulsadores “UP” y “DW” -2, MODALIDAD LLAMADAS AUTOMÁTICAS: La tarjeta simulará unas llamadas primero en subida y luego en bajada. Función disponible solo si la entrada INT está conectada con GND o si el parámetro 63 = 47. NOTA: es necesario conectar también RS! -3, MODALIDAD MANTENIMIENTO: Se puede poner el sistema en mantenimiento y desplazar la máquina directamente por la tarjeta por medio de los pulsadores UP y DOWN. Saliendo del mantenimiento se genera la avería 88, es necesario regresar en la modalidad normal y pulsar SPEEDY para reiniciarlo. El mantenimiento por teclado tiene prioridad más baja que la entrada MAN. -4, MODALIDAD DEFECTOS: Programando 97 = 99 permite la visualización del voltaje de la batería en dècimos de Volt. El punto de la cifra a la derecha corresponde a 10 Volt. 41 Ejemplo: → 14,1Vdc Al presionar el botón "DOWN", se efectua el test de la batería, bajando el voltaje de la fuente de alimentación de la tarjeta. Al presionar el botón "UP", la batería se desconecta manualmente. Si el parámetro 97 ≠ 99 se activa la monitorización de las entradas / salidas. Ver folleto de monitoreo de I /O. 9 -5, MODALIDAD PRESET: Se entra en la modalidad de programación. En programación los visualizadores se encienden y la instalación estará ocupada. Sín mantener pulsado ningún pulsador de programación, el visualizador muestra la última dirección de memoria a quien se ha accedido durante la previa programación. De este momento, utilizando UP y DOWN, se puede impostar la dirección deseada. Pulsando también la tecla SPEEDY, se puede acelerar el desplazamiento. Una vez alcanzada la dirección a controlar o modificar, pulsando el pulsador DATO se visualiza el valor contenido. Este valor puede ser modificado mantenendo pulsado DATO y utilizando UP y DOWN para seleccionar nuevas impostaciones. Una vez alcanzado el valor deseado, simplemente hay que liberar el pulsador DATO para qué sea memorizado en lugar del previo. La confirmación del almacenamiento exitoso será dada por 3 parpadeos de la pantalla. En el caso en que el nuevo valor no fuese coherente con las tablas de programación, será indicado el correspondiente código de avería. Si se trata de las funciones, será indicado el código ‘58’, mientras que si se trata del número de la parada (menor de 2 o mayor de 4) será indicado el código ‘59’. En cuanto a la programación de los tiempos, si un valor cae fuera de los límites permitidos, el valor correspondiente indicado en la tabla es configurado automáticamente. Cada tarjeta proporcionada está programada con los valores por defecto indicados en las tablas previas (impostaciones de fábrica). Para restablecer todos los valores por defecto es necesario programar la dirección 99 = 99 -6, MODALIAD IMP. ESTANDARD: - Mostra el estado de la entrada RS. -7, MODALIDAD OTRAS FUNCIONES: - Mostra el estado de la entrada RD. 3.1 PULSADOR DATO Este pulsador tiene las siguientes funciones: ➢ Si se pulsa en modalidad “NORMAL” es posible visualizar INFORMACIONES INMEDIATAS, o sea muestra el estado activo de algunas señales. Véase párrafo 1.6. ➢ Pulsado junto con el pulsador SPEEDY, permite la consulta de las últimas averías memorizadas por la tarjeta. ➢ En fase de PRESET, es decir durante la programación de la memoria, muestra el dato presente en la memoria en una determinada dirección. 3.2 PULSADOR SPEEDY Este pulsador tiene las siguientes funciones: ➢ En presencia de un bloqueo permanente, permite el desbloqueo manual de la instalación (después de haber resuelto la causa de la avería). Véase párrafo 1.2. ➢ Pulsado junto con el pulsador DATO, permite la consulta de las últimas averías memorizadas por la tarjeta. ➢ En fase de PRESET, es decir durante la programación de la memoria, si se mantiene pulsado junto con el pulsador UP o DOWN, permite acelerar la búsqueda del parámetro de programación deseado (acelera el avance de los números visualizados en la pantalla). Véase párrafo 2 3.3 PULSADOR UP Este pulsador tiene las siguientes funciones: ➢ En fase de PRESET, es decir durante la programación de la memoria, incrementa el valor visualizado en el visualizador. Véase párrafo 2 ➢ Durante el funcionamiento “LLAMADAS MANUALES” (CHIAMATE MANUALI) la presión de la tecla UP permite efectuar una llamada al último piso (extremo superior). 3.4 PULSADOR DOWN Este pulsador tiene las siguientes funciones: ➢ En fase de PRESET, es decir durante la programación de la memoria, decrementa el valor visualizado en el visualizador. Véase párrafo 2 ➢ Durante el funcionamiento “LLAMADAS MANUALES” (CHIAMATE MANUALI) la presión de la tecla DOWN permite efectuar una llamada al piso extremo inferior. 10 3.5 PULSADOR SELECT Es posible desplazarse entre las varias modalidades de la tarjeta. Si se mantiene pulsado el pulsador SELECT + UP se pasa a la modalidad siguiente (Véase tabla en la pagina anterior), mientras que manteniendo pulsado el pulsador SELECT + DOWN se pasa a la modalidad anterior. 3.6 PROGRAMACIÓN POR ORDENADOR Para programar la memoria, además de usar el procedimiento descrito en el párrafo 3, se puede usar un ORDENADOR con el software de supervisión apropiado o mediante GSM (Cloud). Este sistema es capaz de realizar las siguientes operaciones: ➢ Leer y programar la memoria de la TARJETA DE CONTROL (Tiempos, Funciones y Parámetros); ➢ Establecer / cambiar la contraseña; ➢ Establecer el número de matrícula; ➢ Consulta de las últimas 32 averías registradas por la tarjeta de control ; ➢ Eliminar la lista de averías registradas en la tarjeta; ➢ Representación gráfica en tiempo real de la cabina y el hueco del ascensor; ➢ Hacer llamadas de forma remota; ➢ Ejecución del “desbloqueo manual' del sistema en caso de averías permanentes (después de resolver la causa del bloqueo); ➢ Monitoreo del serial La tarjeta de control puede gestionar diferentes tipos de conexión con el ordenador y, por lo tanto, diferentes tipos de canales de comunicación: • CONEXIÓN LOCAL: ORDENADOR CONVERTIDOR SMART RJ12-RS232 CÓDIGO: SMART_RS232_PROG SMART TS EXC CS TD ALT CT CP AP TG OM TA CRP CS ALT EXC ALARGADOR RS232-RS232 (2m.) CONVERTIDOR (OPCIONAL) USB-RS232 CÓDIGO: CB_VG0035 CÓDIGO: CB.CNV.USB-RS232 PCP/KI CP AP TG TD TS NORMALE CH. MANUALI CH. AUTOMATICHE MANUTENZIONE DIFETTI PRESET IMP. STANDARD ALTRE FUNZ. DATO UP SPEEDY DOWN PAP/DI A- A A+ SA/RES SAR/AR FD/PDM FS/PSM APG CPP TSD SELECT EM MAN CS1 FS3 CCS TM INT CM A B C APA ICV IF RD RS D RU VB SNR 7 6 5 4 3 2 1 0 CL GND VIM BAT OCC DB9-F DB9-M CB_VG0035 CONEXIÓN REMOTA POR GSM (CLOUD): GSM106 CABLE RS232-RS232 (13 m.) CÓDIGO: CB_DUPPLEX_02 CONVERTIDOR SMART RJ12-RS232 CÓDIGO: SMART_RS232_PROG SMART EXC TS CS ALT CT CP AP TD TG OM TA CRP ALT EXC CS PCP/KI CP AP TG TD TS NORMALE CH. MANUALI CH. AUTOMATICHE MANUTENZIONE DIFETTI PRESET IMP. STANDARD ALTRE FUNZ. DATO UP SPEEDY DOWN PAP/DI A- A A+ SA/RES SAR/AR FD/PDM FS/PSM APG CPP TSD SELECT EM MAN CS1 FS3 CCS TM INT CM A B C APA ICV IF RD RS D RU VB SNR 7 6 5 4 3 2 1 0 CL GND VIM BAT OCC DB9-M CB_DUPLEX_02 DB9-M • 11 3.7 PROTECCIÓN DE ESCRITURA DE LA PROGRAMACIÓN MEDIANTE CONTRASEÑA Es posible establecer una contraseña, a través del software de supervisión, que permite proteger los parámetros de programación de la escritura. Para ingresar la contraseña a través del teclado, esta solo debe incluir caracteres numéricos; de lo contrario, solo se puede desbloquearla con el software de supervisión. TIPOS DE CONTRASEÑA: CONTRASEÑA “Ningún carácter” Numérica (4 cifras) Numérica (6 cifras) “0000” o “000000” Alfanumérica DESCRIPCIÓN Función contraseña desactivada. Bloquea todos los parámetros, es posible desbloquearla por teclado. Bloquea solo algunos parámetros (47 – 48 - 49), es posible desbloquerala por teclado. Bloquea solo la supervisión, desde la tarjeta está desbloqueada. Bloquea solo la supervisión. DESBLOQUEO DE ESCRITURA DE PARÁMETROS POR TECLADO 1) Entrar en el menú de programación (PRESET). 2) Insertar la contraseña de acuerdo con el tipo ingresado: 4 DIGIT→ Parámetros 49-48 EJEMPLO CONTRASEÑA= 1234 PARÁMETRO VALOR 49 48 12 34 6 DIGIT→Parametros 49-48-47 EJEMPLO CONTRASEÑA = 123456 PARÁMETRO VALOR 49 48 47 12 34 56 NOTA 1: Cada vez que se ingresa en la modalidad de programación es necesario insertar la contraseña. NOTA 2: El error 57 significa que la tarjeta está protegida con contraseña. Este error también se señaliza al insertar la contraseña, incluso si la contraseña es correcta. 12 4. ESPECIFICACIONES DE LA TARJETA Esta tarjeta de control con microprocesador económica y compacta ha sido específicadamente estudiada para instalaciones simples y plataformas elevadoras. 4.1 ➢ ➢ ➢ ➢ ➢ ➢ ➢ ➢ ➢ ➢ ➢ ➢ ESPECIFICACIONES GENERALES Dimensiones: 105 mm x 198 mm. Peso: aproximadamente 208g. Software de la tarjeta: contenido en un microprocesor extraible y reprogramable con tecnología FLASH. Parámetros de configuración de la instalación y lista de averías: Tarjeta completamente programable por medio de teclado y visualizador integrado, o por ordenador tanto en local como en remoto con la ayuda de una sola tarjeta módem. Los parámetros son memorizados de modo permanente por medio de memoria EEPROM y por lo tanto la tarjeta no pierde su programación incluso cuando falta la alimentación. Conformidad con las normas sobre los circuitos de seguridad: La tarjeta es conforme con las normas UNI EN 81-41 actualmente en vigor. Instalaciones hasta 4 paradas universales o hombre-presente, posibilidad de conexión en paralelo, serial o serial / en paralelo. Instalaciones hidráulicas y plataformas elevadoras. Tarjeta programable completamente a través de visualizador 7 segmentos, pulsadores o conmutadores integrados, o por medio de ordenadores tanto en local como en remoto con ayuda de una tarjeta GSM. Mantenimiento a través del cuadro directamente, por medio de los pulsadores en la tarjeta. Comunicación con PC RS232 (a traves de adaptador). Telecontrol y mantenimiento local a través del software de supervisión, y remoto con auyuda de tarjeta GSM (cloud). Comunicación serial testada hasta 120m sin necesidad de cable blindado. 4.2 ESPECIFICACIONES ELÉCTRICAS 4.2.1 Alimentaciones ➢ Alimentación de la tarjeta: tensión continua obtenida enderezando con un puente de diodos una tensión alterna de 14V ± 10% a 25 ± 10% V en los bornes GND y CL. (Consumo de electricidad máximo 300mA). ➢ Alimentación con batería: al borne BAT se conecta una batería de 12V que mantenga alimentada la tarjeta en caso de falta de la red de alimentación para mantener activas las funciones de alarma y de emergencia. Véase párrafo 9.2 ➢ Salida alimentación para tarjetas accesorias y dispositivos de emergencia: se obtiene del borne VIM que proporciona una tensión de 13,5Vdc estabilizada y tamponeada por la batería y una corriente máxima de 1.5A. ➢ Referencia de masa: ▪ GND es el cero de referencia para la tarjeta y todos los elementos externos (lámparas, relés, tarjetas accesorias... con exclusión de las seguridades); ▪ OM es el cero de referencia de la tensión de maniobra y de los circuitos de seguridad; ▪ A- es el cero de referencia del circuito de alarma (A+). Después de las pruebas de aislamiento, por lo general estos bornes se conectan todos puesto a masa. ➢ Temperatura de funcionamiento: de 0°C a +50°C. ➢ Tensiones de seguridad: control de las seguridades de 24Vdc a 110Vac, O DE 24Vdc a 60Vdc 4.2.2 Entradas Todas las entradas, excepto los controles en la cadena de los seguros (optoaislados) se conectan siempre hacia el GND. No se dañan por tensiones inferiores a 24V. Todos las entradas disponen de LED de señalización. 4.2.3 Salidas Todas las salidas de transistor cierran hacia GND dispositivos conectados a 12 o 24Vdc, soportan una corriente máxima de 0.3A y están protegidas por el cortocircuito. Las salidas para los telerruptores de marcha, para los relés, puertas, para el OCC son contactos de relé que soportan 5A máximos. 13 4.3 RESUMEN DEL ESQUEMA ALAMBRICO (PLATAFORMA ELEVADORA) de 24 V a 110 Vac de 24 V a 60 Vdc OM Alimentación para tarjetas seria les de e xpansión VIM EXC + 12 V interno 14 Vac ± 10 % CL 25 Vac ±10% VM PTC Regolador 14Vdc CRP AP (AP/GONG) RAP Seguredade s Carga Baterías Test TST CP (CP/PATT) RCP EXC GND - + 12V BAT ALT KBAT Temp. motor Acercamientos NORMAL LL. MANUALES LL AUTOMATICAS MANTENCIòON DEFECTOS PRESET IMP. ESTANDARD OTRAS FUNC DATO RAC* Puertas Cabina CS Circuito By-Pass de Seguridad >Bloqueos OM UP CT SPEEDY DOWN TG TG SELECT Adaptador Serial RS-232 (Smart_RS232_Prog) SELETTORE TS TS PC INT TM EM APG Controle s Tele rruptores Mantenimiento Contr. Segur / Tempor1 Maniobra Bomberos Sobr ecarga CPP TSD MAN CS1 FS3 Tarjeta Cuadro superior a 3 KV Vmax = 35Vcc (de pico) Fotocélula +12V o +24V OCC Llam ada y relativa señalización en el mism o cable Por Defec to: - 0÷3 Llam adas externas+ ocupado - 4÷7 Llam adas de cabina + llegada 0 ... SA/RES APA RAC* CM 6 V o 12V GND IF ICV Zona Autonivelación TD 7 RS Impulsores principales TA TD Linea separación con aislamento CCS RD TA A+ Alar ma A- SAR/AR Todas las salidas estan protegidas por cortocircuitos Imax = 0.3A PSM/FS PDM/FD Por Defecto Conexión expansion serial cabina y de piso * En caso de puertas automaticas en cabina PCP/KI A B C D PAP/DI RU Posición (ind.61=86) A=0 B=1 C=2 D=3 Salida control seguridades/ Temporiza dor 1 SNR Tonos para sobrecarga VB Señalizac ión de cabina al piso / VálvulaBeringeer 14 5. 5.1 DESCRIPCIÓN DE LAS CONEXIONES 0-7 Entradas y salidas programables. Véase párrafo 2.5 5.2 A / B / C /D Salidas digitales para la indicación de posición con código binario / binario negado / o un polo por piso (hasta 4) B A 0 0 1 1 0 1 0 1 Binaria Parámetro 61 (+32) (+0) 0 3 1 2 2 1 3 0 Un polo por piso D C B A 0 0 0 1 0 0 1 0 0 1 0 0 1 0 0 0 Parámetro 61= +16 0 1 2 3 1 = Salida activa (GND) 0 = Salida inactiva (abierta) Si no se programa “+16” en la dirección 61 la salida D puede tener las siguientes funciones: • • 5.3 Selecciona el segundo lado apertura. Véase párrafo 6.8.3 Intercambio lato apertura adelantado al cambio de velocidad a la llegada al piso de destinación para pisos muy cercanos d<10 cm (permite la parada directamente en los sensores de parada correctos sin el utilizo de la función autonivelación). Véase párrafo 6.8.3 A- / A+ / AR / RES / SA / SAR Al programar el parámetro 1 a "4" o "12", se activa la gestión de la ley 13 (ley italiana): ➢ A- / A+: Entrada para el pulsador de alarma; ➢ RES / SA: Entrada para el pulsador de reset de un error o de la ley 13. Salida que da la indicación intermitente de que se ha inviado la alarma (ALARMA EN ACTO); ➢ AR / SAR: Entrada para el pulsador de la ALARMA RECIBIDA. Salida que da la indicación fija de que se ha recibido la alarma (ALARMA RECIBIDA). Al programar el parámetro 1 a "0" o "8", se desactiva la gestión de la ley 13 (ley italiana): ➢ A- / A+: Entrada para el pulsador de alarma; ➢ RES / SA: Entrada para el pulsador de reset de un error o de la ley 13. Salida para el GONG. ➢ AR / SAR: Entrada de acceso al hueco del ascensor, el sistema entra en un bloqueo permanente que indica la avería "88" (necesario reset manual, SPEEDY / RES). Salida para señalización de intento de acceso al hueco del ascensor (avería 88), también se activa con una falla bloqueante ( por ejemplo, Err 81); 15 5.4 ALT Es la entrada para el control de la señal de ALT. ➢ Cuando se activa (ALT abierto): ▪ se interrumpe la línea de las seguridades; ▪ la cabina se detiene; ▪ se detiene el eventual cierre de las puertas; ▪ se desactiva la autonivelación; ▪ se disactiva la apertura. ➢ Cuando se desactiva (ALT cerrado): ▪ si la cabina se encuentra dentro de la zoda de apertura de las puertas, estas se abren; ▪ si la cabina no se encuentra dentro de la zona de apertura de las puertas, las mantiene cerradas. Puede utilizarse para el control de los acercamientos de puertas semiautomáticas no hidráulicas en lugar del PAP/CM. 5.5 AP / CP / CRP Son los contactos de relé de las puertas: ➢ AP: salida que manda la apertura de puertas (para el lado 1 en el caso de accesos múltiples y/o selectivos); ➢ CP: salida que manda el cierre de las puertas (para todos los accesos); ➢ CRP: entrada del común de los relés de puertas. Puede conectarse después del ALT o antes de la cadena de seguridad. NOTA: Al programar la dirección 20 = 0 (Tiempo del GONG), la salida AP se desactiva. En todo caso, el mando de cierre de las puertas y el inicio de la apertura se activan solo con la señal ALT activa. 5.6 APA Es posible activar este entrada programando el valor +8 en el parámetro 62; Este entrada tiene dos funciones: ➢ Zona de habilitación apertura de las puertas (la apertura se activa solo en la zona de parada APA + IF / ICV). ➢ Zona de autonivelación (Si el parámetro 32 ≠ 0) El control de este entrada se escluye en emergencia. En caso de incongruencia entre IF / ICV e APA se genera la avería “37”. IF ICV APA Zona de PARADA y de PUERTAS 5.7 Zona de AUTONIVELACIÓN APG Es la entrada de control del telerruptor de la gran velocidad (TG). Debe estar cerrado a GND: ➢ Durante la pequeña velocidad, de otra forma la instalación se detiene y indica la avería ‘64’ ➢ Cuando la instalación se estaciona, de otra forma se indica la avería ‘44’ 5.8 BAT Es la entrada para conectar la batería de 12V que mantenga alimentada la tarjeta en ausencia de la alimentación principal (CL/GND). Tiempo de separación de la batería despues de la activación de la operación de emergencia (entrada EM): 0 – 97 = Tiempo (de 1 a 97 min.) y automático (Vbat <10Vdc); 98 = Automático solamente (Vbat <10Vdc); 99 = Sin separación 16 5.9 CCS Es la entrada para el contacto de cabina en sobrecarga (Normalmente Abierto). Es configurable Normalmente Cerrado programando ‘+32’ en la dirección 62. La sobrecarga se exlcuye en emergencia, en mantenimiento, fuera de la zona de parada de las puertas, con puertas cerradas con llamada activa. 5.10 CL Es la entrada para el positivo de la alimentación de la tarjeta. 5.11 PCP / KI - PAP / DI ➢ CONEXIÓN SERIAL (Parámetro 11=64): o PAP / DI: Señal dato, para la conexión serial de cabina y de piso; o PCP / KI: Señal clock, para la conexión serial de cabina y de piso. ➢ CONEXIÓN PARALELA (Parámetro 11=00): o PAP / DI: Entrada pulsador de apertura puertas (PAP). Se excluye en mantenimiento con CS cerrado y durante el recorrido. o PCP / KI: Entrada maniobra bomberos: Váese Maniobra bomberos o si al programar un valor impar al parámetro 30, funciona como entrada para desactivar la apertura de las puertas (AP). 5.12 CPP Es la entrada de control del telerruptor de la pequeña auxiliario (TA). Debe estar cerrado a GND: ➢ Cuando la cabina está detenida, se genera la avería ‘46’. Debe estar abierto: ➢ Cuando la cabina está en movimiento (TS o TS) durante la pequeña velocidad, o sea cuando la tarjeta activa TA, de otro modo la instalación se para con la avería ‘53’. 5.13 CM Entrada para el control de la costilla móvil y / o fotocélula para todos los accesos (acceso 1 y 2). Véase párrafo 6.7. El CM se puede conectar: -En paralelo o en serie (+16 al parámetro 38); -Tanto en paralelo como en serie (no +16 al parámetro 38). CM se comporta como el ALT: ➢ Detiene la cabina ➢ Cancela la llamada actual ➢ Mantiene la cabina ocupada En sistemas con puertas semi-manuales, para garantizar la autonivelación en los sistemas hidráulicos, el borne CM se puede utilizar para controlar el acercamiento de las puertas externas, en lugar del ALT (consulte el diagrama a continuación). El relé de aproximación RAcc, si está desenergizado, deja el CM abierto y las puertas permanecen abiertas. Puertas Cabina Acercamiento Bloqueo CM RAcc RAcc ALT CS 5.14 CS Este entrada se conecta después de los contactos de las puertas. Cuando recibe la tensión de maniobra, significa que las puertas están cerradas y la tarjeta puede activar los telerruptores de marcha. Si este borne permanece abierto más allá del tiempo de partida fallida TMP (dir. 21) del inicio del cierre, la tarjeta: ➢ Indica la posición actual intermitente (avería ‘0-3’); ➢ Abre las puertas; Este comportamiento, con la excepción de la apertura de las puertas, ocurre incluso fuera de piso. Si, por otro lado, esta partida fallada se verifica durante la sincronización, se indica la avería ‘45’. 17 En todo caso, se puede volver a intentarlo pulsando cualquier pulsador de llamada. En caso de conexión de los bloqueos de las puertas de piso entre CS y CT se genera la avería de la fallada salida si CPP y TSD están cerrados (en GND) en el mismo tiempo. (Durante el recorrido) 5.15 CS1 Entrada multifunción: ➢ TMR1 CS1 puede funcionar como entrada al TMR1 de uso general (temporizador), combinado con la salida RU. El temporizador puede ser configurado a un valor entre ‘0’ y ‘89’ décimos de segundo en el parámetro 31. (NO CONFIGURAR +4 AL PARÁMETRO 62) ➢ Control del circuito de seguredad CS1 puede servir de entrada para el control del circuito de seguridad programando ‘+4’ en la dir. 62 (de este modo se desactiva el TMR1 de uso general). Cuando este control está habilitado y el CS1 está abierto, se deshabilita automáticamente la autonivelación. La avería 83 se activa. Véase párrafo 8.1. 5.16 CT Es el común del telerruptor (salidas TD, TS, TA, TG). 5.17 EM Es la entrada de emergencia, es decir una interrupción de la red de alimentación. EM debe cerrarse a masa para evitar el bloqueo con un código de avería ‘81’. Véase párrafo 9.2. 5.18 EXC Es la entrada de margen de recorrido. Se conecta al inicio de la cadena de seguridad, precedido solo por los contactos de margen de recorrido. Si EXC se abre en modalidad normal, la instalación se bloquea en modo permanente e indica el código de avería ‘81’, y la cabina permanece parada incluso si “EXC” vuelve a cerrarse (bloqueo permanente). En emergencia la avería se excluye. En mantenimiento si ocurre la avería 81, la entrada “EXC” vuelve a cerrarse y la avería se restablece automáticamente. 5.19 FS3 Entrada multifunción que puede servir para: ➢ Maniobra bomberos Configurando CHF (dir. 29) a ‘96’ o ‘98’, FS3 se configura como entrada (normalmente abierta) para la activación de la maniobra bomberos. Si la señal se activa, después de haber completado la llamada corriente, se activa una llamada al piso NPM (dir. 39). Véase párrafo 9.7.1 ➢ Control de un contacto ‘importante’ Para activar el control de conmutación es necesario configurar el tiempo CHF (dir. 29) al valor ‘99’. El contacto conectado a FS3 debe conmutar por lo menos una vez en todo el recorrido desde el piso más bajo (RD) hasta el más alto (RS). Si no se efectúa la conmutación, se genera la avería ‘57’. Esta avería es excluida en emergencia y en el caso de sincronización en avería (RS o RD) NOTA: Para activar este control tienes que conectar la entrada RS! 5.20 GND Es el cero de la alimentación de la tarjeta y de los luminosas. Físicamente es separado por OM para facilitar las pruebas de aislamiento. 18 5.21 ICV / IF Son las entradas para los impulsores de parada y de cambio de velocidad / contador pisos. Están activos abiertos o cerrados según la programación en la dir. 15 (‘0’- abiertos en el piso ‘64’ - cerrados en el piso). Véase párrafo 6.3. NOTA: En el caso de una instalación de 1 velocidad, los imanes de desaceleración son opcionales. Su estado a lo largo del hueco del ascensor está representado en el siguiente gráfico: IF ICV Zona di PARADA Zona di AUTONIVELACIÓN 5.22 INT ➢ Si en la ubicación 63 está programado el valor 43: ▪ ▪ Si INT está conectado a GND: las llamadas internas y externas son siempre en maniobra universal. Si INT está abierto: las llamadas internas y externas son siempre de “Hombre presente”. ➢ Si en la ubicación 63 está programado el valor 47: ▪ Las llamadas externas son siempre en maniobra universal. ▪ Si INT está GND: las llamads internas son siempre en maniobra universal. ▪ Si INT está abierto las llamads internas se efectuan de “Hombre presente”. 5.23 MAN Es la entrada de activación del mantenimiento. Está activa cuando se cierra a GND o puede estar normalmente cerrada (activa abierta) programando en la dir. 62 el valor ‘+1’. Véase párrafo 9.5. 5.24 OCC Salida para las lámparas del ocupado (utilizado solo en las instalaciones universales). Véase párrafo 8.4. 5.25 OM Es el cero de la tensión de maniobra. Véase párrafo 4.2.1. 5.26 PDM / FD - PSM / FS Entradas para los pulsadores respectivamente para la bajada y para la subida en mantenimiento.Véase párrafo 9.5 Mientras que FD (flecha hacia abajo) y FS (flecha hacia arriba) son las salidas para las flechas de dirección, pueden ser fijas (par. 5 = 4) o parpadeantes (par. 4 = 12). Las entradas paralelas de la tarjeta también se pueden usar para los pulsadores de mantenimiento, para llamadas de cabina 0 (C0 = PDM) y 1 (C1 = PSM). 19 5.27 RD / RS Son las entradas de los impulsores sincronización en bajada y en subida. Están activos cuando están ABIERTOS. POSICIÓN CABINA Primer piso inferior (0) Pisos intermedios Último piso superior RS ON ON OFF RD OFF ON ON Deben intervenir solo en los pisos extremos y algunos centímetros después de IF y ICV, o bien después del tramo de deceleración. RD debe ponerse en el piso más bajo de la instalación y RS en el más alto. RS es opcional, si no se usa conectar la entrada a GND. Se pueden utilizar como zona de desaceleración en los pisos extremos (en lugar de IF / ICV) El mal funcionamiento de estos impulsores es indicado por los siguientes códigos de avería: ➢ avería ‘41’: Si RD y RS están abiertos. Este control se efectua en todo momento y en cualquier posición que se encuentre en la cabina; ➢ avería ‘55’: Si RD está siempre cerrado a GND (en el piso más bajo también) 5.28 RU Salida multifunción: VALOR PARÁMETRO 31 0÷89 90÷95 96 97 98 99 FUNCIÓN Temporizador entre CS1 y RU de 0 a 89 décimas de segundos Salida RU, función “TA”, se activa con TS / T D; Salida RU, habilitación autonivelación (On durante autonivelación) Salida RU, función logica “or” de IF y ICV (OFF, solo si ambos OFF) Habilitación circuito de seguredad (RU, ON→APA + IF o APA + ICV); No usado 5.29 TA Es la salida para el mando del telerruptor auxiliar TA. Esta salida se activa simultáneamente con los mandos de subida (TS) y bajada (TD) y permanece activa hasta que el mando de salida o bajada es activo. 5.30 TD / TS Son las entradas de control de los telerruptores de la subida (TS) y de la bajada (TD). 5.31 TG Es la salida de la gran velocidad (relé TG). 5.32 TM Entrada para el termómetro de resistencia de detección de la temperatura del motor. Véase párrafo 7.3. 5.33 TSD Es la entrada de control para los interruptores de control remoto de ascenso y descenso. Debe ser: - Cerrado a GND cuando el sistema se detiene, de lo contrario se señaliza el código de avería '47'; - Abierto cuando el sistema se está moviendo. Si no se abre cuando la tarjeta activa TS o TD se señaliza el código de avería '52' para el TS o '51' para el TD, cancela la llamada y el sistema permanece ocupado. Esto ocurre incluso si el TSD se cierra durante la marcha. 20 5.34 VB ➢ Señalización de cabina en el piso (dirección 29 = 96) Salida para la señalización de cabina en el piso. La señal se activa en todos los pisos activos en la parada (durante la marcha de la cabina también) ➢ Gestión Válvula Subida/Bajada de las Unidades de Control con Soft-Stop o Válvulas Proporcionales Programando en la dirección 29 (CHF) = 99 o 99, la salida VB conmuta como indicado en el esquema a continuación, donde TRIF es un tiempo programable en la dirección 26 desde 0 hasta 99 décimas de esgundo. Esta función puede usarse para dar stop inmediado a las válvulas y retrasar la caída del motor. S/D VB TRIF (par.26) Zona parada (IF+ICV) 5.35 VIM Salida para alimentaciones externas: alimentación para eventuales tarjetas externas que deban ser mantenidas alimentadas por la batería en caso de falta de red (máx 1.5A). Para cargas mayores es preferible una interfaz de relé. 5.36 SNR Es la salida para el timbre. SNR Activa el timbre cuando: ➢ se verifica la sobrecarga en cabina (CCS activo) por 2 segundos; Si la sobrecarga permanece siemrpe activa, la salida SNR después de un minuto se apaga; ➢ impulsivamente a la presión de un pulsador en cabina (Bip activo, dir. 0 = 3). 5.37 INDICACIÓN DE LED Todas las entradas y las salidas principales tienen leds de indicación que señalan si el I/O correspondiente está activo (LED encendido) y si no está activo (LED apagado). 5.37.1 Led PWR Es un LED VERDE que indica la presencia de la alimentación de la tarjeta. Se enciende apenas la tarjeta es alimentada. 21 6. 6.1 CARACTERÍSTICAS DE LA INSTALACIÓN BATERÍA La batería sirve para mantener alimentada la tarjeta y las seguridades para mantener activas las funciones de alarma y de emergencia. Durante la presencia de la red, la tarjeta provee a cargar la batería por medio del cargador interno y a desconectarla después de un tiempo SBA programable del cierre de EM (que coincide con la falta de red) o automáticamente si la tensión de la entrada BAT es : <10Vdc o > 15Vdc. Parámetro SBA (dir. 28): 0: Separación inmediata (activación EM o EXC). 1-97: Desactivación después de un tiempo (de 0 a 97 min) o automática si VBAT <10Vdc o> 15Vdc. 98: Desactivación automática si VBAT <10Vdc o> 15Vdc. 99: Control deshabilitado, batería siempre insertada Cargador externo 12V VM 24Vdc KRT Seguridades VIM 25 Vac ± 10% PT C CL 220Vac + 12 V interno Regulador 14Vdc KRT Test TST OM Cargador GND Cargador 12V - 0 0 220 220 + BAT 12V C_BAT KBAT Tarjeta De Control P P B+ B12V - + +12 o 24 V LE EM KRT GND Cargador interno VM 24Vdc Seguridades KRT VIM 25 Vac ± 10% CL KRT OM BAT - + 12V + 12 V interno Regulador 14Vdc Test TST Cargador GND -12V+ KRT PT C KBAT Diodo baja caída (1N5822 3A 40V) Tarjeta De Control LE EM KRT GND . 22 6.2 CONEXIÓN SERIAL O PARALELA La comunicación de la tarjeta de control presente en el cuadro de maniobra con la cabina y con cada uno de los pisos se puede efectuar por medio de: ➢ Conexiones paralelas: se conectan los alambres directamente a cada uno de los bornes de la tarjeta, de modo que se utiliza un solo alambre para cada señal. Véase párrafo 2.5 ➢ Conexiones seriales (programando 64 en la dir. 11) las entradas y las salidas son transmitidas a la tarjeta cuadro serializados en un solo alambre por medio del uso de tarjetas de expansión serial de cabina o de piso. Véase parrafo 10 NOTA: es posible tener conexiones seriales mixtas a las paralelas (por ejemplo, si es necesario, se puede conectar un visualizador serial y una instalación paralela). 6.3 DISPOSICIÓN DE LOS SENSORES MAGNÉTICOS DE PISO Y DE DESACELERACIÓN Desaceleración normal Dn>2R Pisos muy cercanos Dbb<<R Espacio insuficiente para insertar los imánes de desaceleración A* e B* Piso Dbb R R Piso Dbb Dn Maniobra de baja speed R Piso R Piso Dbb IF ICV IF ICV LEYENDA: R: distancia de desaceleración; Dn: Distancia entre dos pisos con desaceleración normal; Dbb: Dn: Distancia entre dos pisos muy cercanos. 23 DESACELERACIÓN NORMAL (D>2R) CON IMÁNES DE DESACELERACIÓN SIN IMÁNES DE DESACELERACIÓN RD IF ICV RS RD IF ICV RS Opcional R1* R2** Opcional R1* R R Opcional R R ZONA DE DESACELERACIÓN R ZONA DE DESACELERACIÓN R R R R ZONA DE DESACELERACIÓN R Opcional R2** R RD IF ICV RS R RD IF ICV RS R1* Si falta el sensor RS R2** Si falta el imán de desaceleración PROGRAMACIÓN: DIRECCIÓN 15 VALOR 0 64 FUNCIÓN IF\DB e ICV/DA abiertos al piso (sensores n.c.) IF\DB e ICV/DA cerrados al piso (sensores n.o.) 24 PISOS MUY CERCANOS (D<<R) : ESPACIO INSUFICIENTE PARA POSICIONAR LOS IMÁNES DE DESACELERACIÓN A* e B*. RD IF ICV RS ÚLTIMO PISO R Comienzo desaceleración hacia arriba para el último piso Dn Desaceleración para el piso 1 hacia abajo (Empezando desde un piso superior al 2) TERCER PISO (2) R Db R Pareja de pisos cercanos. Parámetro 35=1 Maniobra en pequeña velocidad entre piaso 1 y 2 SEGUNDO PISO (1) Desaceleración para el piso 2 hacia arriba (empezando desde un piso inferior al 2) Dn R Comienzo desaceleración hacia abajo para el piso 0 PRIMER PISO (0) RD IF ICV RS PROGRAMACIÓN: DIRECCIÓN VALOR 15 0 64 35 0 - 32 FUNCIÓN IF\DB e ICV/DA aperti al piso (sensores n.c.) IF\DB e ICV/DA cerrados al piso (sensores n.o.) Pareja de pisos cercanos Programar pareja de pisos cercanos: Primer piso = 0 (pareja entre 0 y 1) …. 32= Ninguna pareja de pisos cercanos En el caso de pisos cercanos a los pisos extremos, la sincronización no debería cubrir 2 pisos. Por lo tanto, para garantizar una desaceleración correcta durante la fase de sincronización, se debe introducir un segundo sensor de sincronización de desaceleración (RS2 y / o RD2, dispositivos sincronización auxiliares para la desaceleración anticipada en los pisos extremos), que se conectará como se muestra en figura. RD TG RD RS RS S M A R T RD2 RS2 TG TD TS PISO 0 RD2 RD IF ICV Pareja de pisos cercans al piso 0 25 PISOS MUY CERCANOS (D<<R): ZONA DE PUERTAS SUPERPUESTAS Cuando la zona de puertas entre los dos pisos cercanos está superpuesta, esta solución puede ser usada: Usar la salida D, sin programar “+16” en la dirección 61: ➢ El intercambio en el lado de apertura andelantado al cambio de velocidad al llegar al piso de destino, para pisos muy cercanos (por ejemplo d<10 cm) permite la parada directamente en los sensores de parada correctos sin el uso de la función de nivelación). Nota: Conectar los dobles sensores de posición como se muestra en el diagrama para evitar falsos cambios durante el intercambio. Lado apertura Salida D A→ AP (lado 1) 0 (desactiva) B→ AP (lado 2) 1 (GND) El cierre de todas la s entradas es simultanea y controlado por CP SMART IF ICV IFB GND D LEYENDA: IFa/ICVa: Sensores lado A; IFb/ICVb: Sensores lado B; RSP2: Relé de intercambio de los sensores segundo lado de apertura RSP2 ICV B VIM RSP2 IFA ICVA NP(dir. 32 = 3) Lado B = Optional C3 RS Lado A RD IFa-b ICVa-b Piso 2 (Add. Dir = 2) 1B x Piso 1B C2 (Add. Dir = 3) x x 1A C1 x Piso 1A (dir. 51 = 3) ICVa IFa x x IFb C0 ICVb RS 6.4 RD IFa-b ICVa-b Piso 0 (dir. 50 = 1) PARADA RETARDADA Es posible retardar la parada de un tiempo TRIF programable en la dir. 26 hasta un máximo de 9.9 segundos en intervalos de 1 décima de segundo. Retardar la parada permite reducir el número de repescas. Si se programa un intervalo excesivo o el magneto de parada es demasiado corto, o sea que sobrepasa la zona de parada, se señala el código de avería 42, y en todo caso la cabina se detiene saliendo de IF. El control de la avería 42 queda excluido en mantenimiento. El retardo TRIF siempre está activo. Se puede utilizar esta función per la gestión del soft-stop. Véase párrafo 5.34 26 6.5 FOTOCÉLULAS Y COSTAS MÓVILES CM es la entrada de las fotocélulas y de las costas móviles. (Para todos lados de apertura) Si se abre: ➢ Impide el cierre de la respectiva puerta y causa su reapertura (si CS ya estaba abierto). ➢ Prolonga el tiempo de apertura de las puertas; ➢ Impide el movimiento, si abierto en marcha detiene la instalación. (En caso de puertas automaticas, evitarlo con un contacto del operator para la marcha o margen de recorrido. La reapertura de las puertas está disactiva con CS activo. Pueden utilizarse también para el control del cierre de los acercamientos de las puertas manuales externas. 6.6 GONG La duración del impulso de Gong puede programarse en la dir. 20 (tiempo TIG) y puede asumir valores entre 1 y 99 décimos de segundo. Para deshabilitar el gong es necesario programar este tiempo a ‘0’. De esta manera se desactiva también la apertura de las puertas “AP”. Está deshabilitado también durante la programación (PRESET) o si la instalación está en mantenimiento o en bloqueo. 6.7 PATÍN RETRÁCTIL La salida CP tiene función de patín retráctil con las puertas manuales. Esta es activada al inicio del servicio (incluso en mantenimiento) incluso si las puertas todavía están abiertas y cae entrando en parada. 6.8 PUERTAS ➢ TAP dir. 16: tiempo en el que las puertas permanecen abiertas. Este tiempo se anula al pulsar el pulsador PCP o cualquier otro pulsador de llamada en cabina. Si la instalación está en el piso, no están presentes reservaciones y se programa para efectuar el estacionamiento de puertas cerradas (dir. 1 valor ‘8’ o ‘12’), TAP es el tiempo por el cual las puertas permanecen abiertas antes de volver a cerrarse. Cuando la cabina está en el piso y ya están presentes otras reservaciones, es la intervención del tiempo después del cual se vuelven a cerrar las puertas para hacer partir la cabina. 6.8.1 Puertas manuales / Puertas automáticas (misma programación) Las puertas manuales se activan programando ‘0’ en la dir. 2. En tal caso: ➢ La salida AP se activa con las siguientes condiciones. - Gong. Véase párrafo 6.6; - Push to open (si CS ya está cerrado y se abre al piso sin una llamada) - CM1 abierto - PAP cerrado - CCS activo El mando AP permanece activo por el tiempo programado en la dirección 16 “TAP”, desde la desactivación de todas las condiciones arriba mencionadas. Este mando se deshabilita si el mando de CP está activo o si la cabina no se encuentra in zona puertas. Si la cabina est´fuera de la zona de parada el mando AP no se activa. ➢ La salida CP se activa con las siguientes condiciones. - Si la cabina se mueve, pero no en autonivelación; - Si las entradas ALT, CM1 están cerradas y PAP abierto; • Patín activo; • CS abierto y AP deshabilitado. 6.8.2 Puertas Semi-Automáticas Véase párrafo 5.13; 6.8.3 Estacionamiento con puertas abiertas o cerrdas Después de completar el ultimo servicio, la cabina puede estacionarse con puertas abiertas (SPA) programando ‘0’ en la dirección 1, o con puertas cerradas (SPC) programando ‘8’ a la dirección 1. Si SPC está activado, despues el estacionamiento, al final de la operación, las puertas no abren y no hay el GONG. NOTA: En el caso de puertas manuales, programar el correcto tipo de estacionamiento, dependiento del funcionamiento de la entrada CS. 27 6.8.4 Accesos múltiples Se habla de accesos múltiples cuando están presentes dos accesos diferentes a la cabina. Los accesos son selectivos cuando los dos son totalmente independientes, o bien se abran solo uno por uno. En este caso, cada puerta selectiva corresponde prácticamente a una sola parada y por lo tanto el número de paradas (llamadas) es mayor que el número de pisos de la instalación. Se pueden programar hasta dos accesos por cada piso. Los lados de apertura (piloteados por las salida AP y controlados por la fotocélula CM) son programados para cada piso desde la dir. 50, hasta la dir. 53. Es posible seleccionar el segundo lado apertura por medio de la salida D no programando “+16” a la dir. 61. La salida D se activa al cambio de velocidad Lado apertura Salida D A→ AP (lado 1) 0 (desactiva) B→ AP (lado 2) 1 (GND) SMART GND AP D LEYENDA: KAP1: Relé lado apertura A; KAP2: Relé lado apertura B; RAP2: Relé de intercambio segundo lado apertura; VIM RAP2 KAP2 KAP1 RAP2 El cierre de todas las entradas es simultaneo y guiado por CP. NP(Dir. 32 = 3) Lado B C3 Lado A RS RD IF Ejemplo Los números Cn, en rojo, son las correspondientes señales que deben conectarse a la tarjeta de control o a las expanciones en serie. En el piso 1, hay 2 pulsadores de llamada independientes (apertura selectiva) ICV Piso 2 (Dir. 52 = 2) Por lo tanto, en el parámetro NP (dir. 32) se programará el número de pisos de la instalación (3), y no el número de paradas, que en vez se calculan automáticamente. C2 C1 Piso 1A (Dir. 51 = 3) Piso 1B (Dir. 51 = 3) C0 RS RD IF ICV Piso 0 (Dir. 50 = 1) NOTA: El número máximo de servicios es igual al número máximo de pisos (PAR 32→Max 4). 6.9 PRUEBAS DE FINAL DE RECORRIDO Esta prueba se puede ejecutar en mantenimiento: - Puentear los sensores de sincronización (RS → GND, RD → GND); - Mover la cabina hacia arriba hasta el margen de recorrido. 28 6.10 ESTACIONAMENTO 6.10.1 Reenvío por estacionamiento ➢ Reenvío por estacionamiento en el piso NST: después de un tiempo TSN programable en la dir. 27 de ‘0’ a ‘99’ x 10 segundos del apagado del ocupado, la cabina es reenviada a la parada de estacionamiento NST programada en la dir. 34. Este reenvío por estacionamiento se desactiva si NST es mayor que el número de paradas de la instalación. ➢ Reenvío al piso bajo después de 14 minutos: solo si la instalación es hidráulica se puede activar el reenvío automático al piso más bajo después de 14 minutos del apagado del ocupado, programando ‘2’ en la dir. 12. Cuando la cabina está en el piso 0 no puede ser reenviada a ningún otro piso de estacionamiento. 6.11 TEMPORIZADORES La tarjeta cuadro pone a disposición dos temporizadores de uso general: Entrada CS1 / Salida RU El retardo de este temporizador se programa de ‘0’ a ‘89’ décimos de segundo en la dir. 31 (L13). Configurando el valor “+4” al parámetro ‘62’ se desactiva el temporizador. Entradas CS1 T Salida RU T es un temporizador de retraso de excitación. 6.12 TIPO DE INSTALACIÓN: PLATAFORMA ELEVADORA 6.12.1 Hombre Presente / Universal Véase párrafo 10.3 29 6.13 VELOCIDAD 6.13.1 Una velocidad Ver el funcionamiento dos velocidades con las siguientes modificaciones: • No utilizar la salida TG; • No utilizar el controlo sobre APG, y luego puentear entre las salidas APG y GND. SIN IMANES DE DESACELERACIÓN (1 VELOCIDAD) RD IF ICV RS Optional STOP ZONE RD IF ICV RS 30 6.13.2 Dos velocidades (arranque directo) STOP DESACELERACIÓN (ZONA PARADA) SALIDAS START TG TS/TD ENTRADAS TA APG CPP TSD 6.13.3 Dos velocidades (arranque estrella - triángulo) Para el arranque estrella / triángulo es necesario utilizar la función del temporizador entre CS1 y RU, programable según el parámetro 31, de 1 a 89 décimas de segundo. Seguridades +48V CT PLACA DE CONTROL TG KY TA TD TS TSD APG CPP GND CS1 RU CL K K RU K KG K RU KD KG V VL VD KY KD KS K RU KD KY KS KY KG K KS K 6.14 MAYOR TIEMPO DE ESPERA PARA CARGAR / DESCARGAR MERCANCÍAS EN LA CABINA. Al activar esta función, programando el valor "+16" en la dirección 64, es posible "bloquear" la cabina para cargar / descargar mercancías: Para habilitar esta función, las reservas de cabina no deben estar activas.. - La instalación permanece ocupada con las puertas abiertas;; - Las llamadas externas se rechazan. ACTIVACIÓN Esta función se activa manteniendo pulsada la tecla PAP durante al menos 3 segundos. Conectado tanto en serie como en paralelo. Si hay pantallas en serie conectadas, se activará la flecha doble (ascenso y descenso). DEASACTIVACIÓN • • Haciendo una llamada de cabina; Automáticamente después del tiempo programado en la dirección 27 TSN (desde 10 hasta 990 segundos: 01=10 seg, 02=20 seg…..10=100 seg………. 90=900 seg.) 31 7. 7.1 CONTROLES CIRCUITO DE SEGURIDAD Para habilitar el control del circuito de seguridad se debe programar ‘+4’ en la dir. 62 (de este modo se desactiva el TMR1 para uso general). Cuando se habilita este control y el CS1 está abierto, se deshabilita automáticamente la autonivelación. La verificación se realiza en la entrada CS1, debe cerrarse en la zona de las puertas o en la zona de parada (IF + ICV, APA): Avería excluida en las siguientes ➢ ➢ ➢ ➢ ➢ En mantenimiento ALT activo En margen de recorrido En emergencia En sincronización Si CS1 permanece abierto, la planta se detendrá y se mostrará la avería "83". Para activar el circuito de seguridad se puede utilizar la salida RU. Bloqueo '83' es permanente, es decir, es posible desbloquear la planta solo presionando SPEEDY en la tarjeta de control. Este bloqueo se puede desactivar al no programar ‘+4’ en la dirección 62. De esta manera, la entrada CS1 se desactiva pero RU permanece activada. El mismo error ocurre si durante la fase de autonivelación CS1 está abierto. 7.2 MÁXIMO RECORRIDO Es el tiempo de máximo recorrido TMC dentro del cual la cabina puede efectuar un recorrido de un piso. TMC es programable de 10 a 99 segundos en la dir. 22: VALOR (Dir .22) Tiempo De 0 a 9 No usado, la tarjeta configura de modo automático el valor por defecto (80 seg.) De 10 a 80 De 10 a 80 segundos. De 81 a 98 81= 90 seg, 82 = 100 seg, 83 = 110seg, 84 = 120 seg, 85 = 130 seg, 86 = 140 seg...96 = 240 seg, 97 = 250 seg, 98 = 260 seg 99 Infinito (control desactivado) La tarjeta muestra el error "80" cuando finaliza el conteo del temporizador TMC (parámetro 22). El conteo se restablece: • En los imanes de desaceleración; • En el área de parada; • En los dispositivos de sincronización (RS / RD) 7.3 TEMPERATURA DEL MOTOR Para controlar la temperatura del motor se puede conectar al entrada TM de la tarjeta: ➢ la sonda PTC sin programar el parámetro en la dir. 62 con el valor ‘+2’. En el caso de que el valor analógico en entrada sea superior al límite previsto (cuando la termorresistencia supera los 4K aproximadamente) la instalación se bloquea permanentemente con avería ‘56’. El desbloqueo es posible solo si la entrada TM ve una termorresistencia menor que 1,5 K aproximadamente. La avería se restablece automáticamente con una llamada. (En emergencia la avería es permanente). Para desactivar el control programar el valor +2 al parámetro 62 (TM no conectado) 7.4 ZONA DE PUERTAS Por Zona de puertas se entiende el espacio del hueco dentro del cual pueden abrirse las puertas. Esta zona está siempre activa en correspondencia de la zona de parada. Se desactiva cuando deja ambos los dos impulsores (IF e ICV). Si la entrada APA está habilitada, programando el valor ‘+8’ en la dir. 62, la zona de puertas se activa anticipadamente cuando está presente la señal APA y simultáneamente IF o ICV. 32 8. SEÑALIZACIONES 8.1 POSICIÓN / LLEGADA / RESERVA 8.1.1 Indicación de POSICIÓN Posición UN CABLE POR PISO La indicación de posición decimal indica siempre el piso. ➢ En paralelo esta indicación puede ser dada por las salidas A,B,C,D (hasta 4 paradas) o derivada de la binaria por la tarjeta DEC16. Véase párrafo 5.2 ➢ En serial las señalizaciones de posición decimales están disponibles en las tarjetas seriales de cabina. Posición BINARIA La indicación de posición se proporciona pr las salidas binarias A, B, C de la tarjeta cuadro. Las salidas A, B, C, D pueden ser negadas programando un ‘32’ a la dir.61. Véase párrafo 5.2 8.1.2 Pisos Subterráneos En la dir. 33 (NS) es posible programar el valor a visualizar en la pantalla en caso de pisos subterráneos. El número de los pisos subterráneos tiene efecto solo en los visualizadores seriales (en cabina y en los pisos). En la tabla se resumen los valores visualizados por la pantalla en el piso 0 en función del valor programado en la dir. 33 (NS). TABLA “PISOS SUBTERRÁNEOS” NS 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 … Número visualizado en el visualizador en el piso 0 0 -9 -8 -7 -6 -5 -4 -3 -2 -1 0 1 2 3 4 5 6 7 8 9 10 … 8.1.3 Indicación de LLEGADA La indicación de llegada puede darse en paralelo y en serial Véase párrafo 2.5.1 8.2 DIRECCIÓN ➢ Indicación de DIRECCIÓN DE MARCHA Las salidas FS/FD en la tarjeta dan la indicación de la dirección de marcha. Pueden ser fijas (dir. 5 = 4) o parpadeantes (dir. 5 = 12) 33 8.3 OCUPADO El ocupado se enciende con las siguientes condiciones: ➢ ➢ ➢ ➢ ➢ ➢ Después de la primera llamada Cuando la cabina está en sobrecarga En mantenimiento Durante la maniobra interna Durante la programación de la tarjeta (PRESET activo) Cuando la instalación está en bloqueo. El ocupado se puede apagar después del tiempo TOC (programable de ‘1 a ‘90’ segundos en la dir. 24) desde el final del último servicio. Es posible añadir un retardo del apagado del ocupado a los pisos, programando un valor par a la dirección 27 (TSN). Retardo = dir. 27 (valor par) x 10 segs. Ejemplo: Parámetro 27 = 04 (04 x 10 = 40 segundos) La salida OCC se apagará después de 40 segundos del apagado del ocupado en los pisos (TOC, par.24) 34 9. 9.1 MANIOBRAS AUTONIVELACIÓN Es una maniobra que permite a la cabina regresar a la zona de parada tanto en subida como en bajada: ➢ si baja más de IF sin dejar ICV, se activa el telerruptor de subida TS; ➢ si sube más de ICV sin dejar IF, se activa el telerruptor de bajada TD. Para desactivar la función de autonivelación (en el caso de instalaciones electricas) hay que configurar la dir. 30 (RIP) = 0. Si esta maniobra maniobra dura más de los segundos programados en la dir. 30 (RIP) la instalación se bloquea inmediatamente y permanentemente e indica el código de avería ‘82’ . La autonivelación se activa con las puertas cerradas (programando el valor ‘+16’’ en la dir. 62). La maniobra no es efectuada si ocurre: ➢ ➢ ➢ ➢ ➢ ➢ ➢ ➢ bloqueo por avería ‘82’ bloqueo por avería ‘83’ bloqueo por avería ‘88’ que un telerruptor está empastado que la instalación está en mantenimento o en emergencia que la entrada CS1 permanece abierta (cuando está habilitadaa por el circuito de seguridad, valor ‘+4’ en la dir. 62) que el ALT ha sido pulsado (y por lo tanto incluso si está en margen de recorrido) que la entrada APA está habilitada para la autonivelación (en la dir. 62 debe programarse ‘+8’) pero está abierta, si está,es decir, fuera de la zona de autonivelación ➢ En modalidad de programación (PRESET activo) NOTA: No programando “+16” en la dir. 62, la autonivelación en bajada se desactiva de puertas abiertas (CS abierta). Esto es para evitar el riesgo de cizallamiento en el fundo de la cabina. 9.2 EMERGENCIA La maniobra de emergencia se verifica cuando hay una interrupción de la red de alimentación. La maniobra comienza cerrando la entrada EM sin que la alimentación de la tarjeta sea interrumpida. Por ejemplo, conectando al borne BAT una batería al programar el parámetro 28 ≠ 0. Existen las siguientes condiciones generales: ➢ ➢ ➢ ➢ ➢ ➢ La maniobra de emergencia es desactivada en modalidad mantenimiento. Las seguridades deben alimentarse durante toda la maniobra. Se excluye la sobrecarga (CCS). Se apagan todos los visualizadores excepto el de cabina. Se desactivan las siguientes averías: “de 00 a 07”, 37, 45, 55, 56, 57, 62, 80, 81, 82, 83. Cuando se deja EM, se sale de la maniobra de emergencia, pero antes la cabina termina la acción en acto. F7UUNCIONAMIENTO El funcionamiento de la maniobra de emergencia varia según el valor programado en la dirección 43 (PPE). ➢ PPE = 32 la cabina effectúa una sincronización excluyendo los controles sobre los sensores, regresa al piso zero hasta el sensor de sincronización de bajada RD y luego se detiene al piso, mandando el primer lado de apertura (también en caso de doble acceso) para todo el tempo de ocupado. ➢ PPE < 32 y PPE < número de paradas de la instalación se pueden dar las siguientes situaciones: ▪ si la cabina se encuentra en zona de parada, se abren las puertas en el piso corriente; ▪ si la cabina se encuentra parada a un nivel superior al PPE, lo alcanza efectuando una parada regular; ▪ si la cabina se encuentra fuera-de-piso bajo el piso PPE, llega al piso de abajo y hace una apertura de las puertas. Una vez que se abren las puertas, las cierra nuevamente (si el estacionamiento con puertas cerradas está programado) y deja la señal del ocupado (PAP y la llamada al piso actual está activa). 35 ➢ PPE < 32 y PPE > número de paradas de la instalación La cabina baja, se detiene en el primer piso más cercano que encuentra y abre las puertas. En el caso de doble acceso, abre el lado correcto Una vez que se abren las puertas, las cierra nuevamente (si el estacionamiento con puertas cerradas está programado) y deja el ocupado (PAP y la llamada al piso actual está activa). Independientemente del valor de PPE, en emergencia está siempre desactivada la autonivelación. Si la instalación está configurada “hombre presente” en cabina, se puede mover solo en bajada, manteniendo pulsada la tecla de cabina. NOTA: Si durante la maniobra de emergencia la tarjeta se apaga y se vuelve a encender, la operación es la del PPE = 32! Independientemente del valor de PPE, la autonivelación siempre se desactiva en una emergencia. Si el sistema está configurado con "hombre presente" en la cabina, solo se puede mover cuesta abajo manteniendo presionado el botón de la cabina. 9.3 GESTIÓN DE LA PLATAFORMA Esta gestión prevé que: ➢ La cabina se mueve solo si se mantiene pulsado un pulsador de llamada (en cabina o en los pisos). ➢ Si la instalación está ocupada a causa de una llamada en cabina se ignoran los pulsadores externos. ➢ Si el ocupado ha sido originado por una llamada externa, permanece activo solo el pulsador de llamada correspondiente y los otros son ignorados. Por lo tanto quien mantiene ocupada la instalación con la llamada externa, si suelta el pulsador, detiene la cabina pero no pierde la llamada. Todos los otros pulsadores de llamada son ignorados hasta que se desactiva el ocupado. Volvendo a pulsar el pulsador, la cabina vuelve a partir. Véase párrafo 2.5.1 9.3.1 Gestión fosa y cabeza reducida Es posible utilizar la entrada de mantenimiento (MAN). Una vez activada, es posible moverse solo en mantenimiento, y al salir del mantenimiento, la tarjeta entra en bloqueo, señalando la avería 88, y es posible reiniciarla desde la tarjeta manteniendo presionado el botón SPEED durante 3 segundos. Ver párrafo 9.5 9.4 MANIOBRA DE MONTAJE (MANTENIMIENTO) Para activar el mantenimiento en fase de montaje de la instalación, conecte a masa GND los bornes RS y RD y conecte a la tensión de maniobra los bornes EXC, ALT, CS y CT. Conmute en mantenimiento y luego pulse el pulsador PSM para subir o PDM para bajar. La velocidad será la programada para el mantenimiento en la dir. 4. ATENCIÓN: la cabina NO SE DETIENE en los pisos extremos si se mantiene pulsado el pulsador, puesto que no están los sensores de sincronización. 9.5 MANTENIMIENTO Se entra en la maniobra de mantenimiento cuando la entrada MAN es activada o desplazandose en la modalidad MAN. NOTA: El mantenimiento del techo de cabina, activado por medio de la entrada MAN es prioritario respecto al mantenimiento activado por medio del switch de la tarjeta, por lo tanto activando la entrada MAN ya no es posible mover la cabina en mantenimiento usando las teclas UP y DW del teclado de programación. En la dirección 62 se puede programar la entrada MAN activa abierta (programar ‘+1’) o activa cerrada (no programar ‘+1’). La maniobra de mantenimiento se cumple en el modo siguiente: ➢ En la maniobra de mantenimiento la cabina se puede mover manteniendo pulsado uno de los pulsadores sobre la cabina PDM (para la bajada) o PSM (para la subida). Pulsando simultáneamente estos pulsadores la cabina se detiene. Los pulsadores son rehabilitados después de un tiempo programable (RITING dir. 45) desde la parada o desde el regreso en reposo de los telerruptores y soltando los pulsadores mismos. Se puede utilizar también el pulsador UP para mover la cabina en subida y el pulsador DOWN para mover la cabina en bajada durante el mantenimiento. Es posible además utilizar los pulsadores de cabina tanto en serial como en paralelo, C0 (PDM) y C1(PSM) para mover la cabina. Véase Párrafo 2.5.1 ➢ Las puertas vuelven a cerrarse solo después de la presión de PDM o PSM si están inactivas la costa móvil, el PAP, la sobrecarga y el ALT. Las puertas vuelven a abrirse desactivando el mantenimiento (con una conmutación en el ALT) y con la cabina en el piso. ➢ La cabina puede moverse a gran velocidad (‘0’ o ‘2’ en la dir. 4) o a pequeña velocidad (‘1’ o ‘3’ en la dir. 4) y se puede detener en los sensores de sincronización (‘0’ o ‘1’ en la dir. 4) o en los pisos extremos en IF (‘2’ o ‘3’ en la dir. 4) (incluso con PDM o PSM pulsados); 36 ➢ Durante el mantenimiento se suprime un eventual bloqueo permanente, el ascensor resulta fuera de servicio con el ocupado activo y se desactivan: ▪ ▪ ▪ ▪ ▪ ▪ Las averías: “de 00 a 07”, 37, 45, 57, 62, 80, 81, 82, 83 La autonivelación; La emergencia; La pre-apertura; El control en la conmutación de FS3; El mando de apertura puertas ➢ Al final del mantenimiento, después de haber salido del techo de la cabina y haber cerrado las puertas, la cabina permanece parada hasta la próxima llamada (interna o externa). 9.6 SINCRONIZACIÓN Después de una falla de red, se debe sincronizar la instalación, a menos que la cabina se encuentre ya en uno de los pisos extremos. 9.7 BOMBEROS 9.7.1 Maniobra bomberos Esta maniobra está habilitada solo cuando el parámetro en la dir. 39 (NPM) se programa a un valor < ’8’. Si NPM = 32, la maniobra bomberos está siempre deshabilitada. A fin de activar esta maniobra, se puede utilizar una de las siguientes entradas: ➢ FS3, planteando CHF (dir. 29) a ‘96’, o ‘98’. ➢ PCP, en todos los otros casos (cuando la salida FS3 ya es usada por otras funciones) Cuando esta señal se activa, se tendrán las siguientes condiciones de funcionamiento: ▪ El pulsador de apertura de las puertas PAP permanece activo (apertura puertas activada); ▪ Despues de servir la llamada actual volvendo a abrir las puertas, se activa una llamada al piso NPM (dir. 39); La llamada en curso se sierve sempre para evitar bruscas inversiones de marcha. 37 10. EXPANSIONES SERIALES 10.1 ESQUEMA DE CONEXIÓN SERIAL (HASTA 4 PISOS) NOTA: Es posible tener conexiones seriales mixtas a las paralelas (por ejemplo se puede conectar, si necesario, un visualizador serial en una instalación paralela) 38 10.2 CABLAJE ATENCIÓN: Para limitar al mínimo disturbios e interferencias en la comunicación con la tarjeta cuadro, prestar atención al cablaje. 1) En el caso de cable viajero, el GND tiene que pasar entre clock y data SERIAL CABINA GND 2) Los 4 cables seriales deben pasar lo más lejos posible de los cables de alimentación: A. Luz de la cabina (220Vac) B. Operador de puerta (125 trifásico, 380 trifásico) C. Freno de motor ... 39 10.3 SERIALES DE CABINA 10.3.1 ENTRADAS 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 TARJETA SERIAL, DIRECCIÓN 0 C0/PDM C1/PSM C2 C3 ----CM RD ICV IF … CCS MAN PCP CM PAP PSM PDM RS RD ICV IF SALIDAS L0 L1 L2 L3 L4 L5 L6 L7 L8 L9 L10 L11 L12 L13 L14 L15 L16 L17 L18 L19 L20 L21 L22 L23 P0/A0 P1/A1 P2/A2 P3/A3 ----P0 P1 P2 P3 ---AP2 SAR AP1 CP1 OCC GONG SNR FS FD LEYENDA Y NOTAS Cn= Pulsadores de llamada CCS, MAN, CCO, CM1, PAP, PSM, PDM, RS, RD, ICV, IF, CCC, PCP = Entradas del cuadro serializadas Pn = Posición An = Llegada AP1, CP1,OCC, GONG, SNR, FS, FD= Salidas del cuadro serializadas. Notas: 1) Para facilitar la puesta en marcha de la instalación, algunas entradas se leyen también en paralelo por el cuadro, en particular las llamadas: Cn, CCC, CCS, MAN, PSM, PDM, RS, RD. 2) Las salidas AP1 y AP2 son respectivamente los mandos de primero y segundo acceso. 3) La tarjeta CRB_LINK no funciona con la tarjeta SMART. 4) Si los sensores (RS / RD / IF / ICV) están conectados en serial, abilitarlos en el parámetro 38. 40 10.4 SERIALES EXTERNAS PARA LLAMADA EXTERNAS Estas expansiones se utilizan para recolectar las llamadas de piso y transportarlas en serial en la tarjeta de control. Además estas tarjetas, proporcionan también las señalaciones luminosas en los pisos y las señalaciones de alarma en acto. ENTRADAS 0→ 1→ SALIDAS L0 → OCUPADO / LLEGADA* L1 → PRESENTE/SA ** Llamada -- NOTAS: *Para el funcionamiento de las luminosas ocupado / llegada véase el párrafo de las llamadas en parallelo. Véase párrafo 2.5.1 **SA=Señalización alarma - Función programable en la dirección 10 (0=SA, 32=Presente) TARJETA DE CONTROL serial externa DI GND KI VIM Tarjeta serial de piso Tarjeta serial de piso DIRECCIÓN 0 DIRECCIÓN 1 Tarjeta serial de piso DIRECCIÓN n. 41 FUNCIONES FIJAS (NO PROGRAMABLES EN ESTA VERSIÓN): - Salida D, solo intercambio lateral de apertura (AP1 y AP2, solo en serie); - 2 velocidades; - Desaceleración normal en todos los pisos (sin desaceleración prolongada); - Imanes normales (sin sensores invertidos); - Gestión de puertas simplificada (sin puertas automáticas); - Max 2 accesos selectivos (no 3 accesos); - Sistema hidráulico (sin cuerda); - Gong en el piso (no en la desaceleración); - Sincronización en el piso más bajo (no en el piso más alto); - Control de puertas siempre deshabilitada; - Operador siempre encendido; - Hombres / llamadas individuales (no reservadas); - Configuración de imanes DA / DB (sin IF / ICV); - Retraso en pisos cercanos no disponible (RCPV); - Sincronización después de una llamada (no automática); - Pre-apertura no habilitada; - Multiplexación activa de Entradas y Salidas; - Instalación sin cabeza y pozo (error 88 siempre activo); - Pisos cercanos, siempre a baja velocidad; - Función de bloqueo inmediato o después de una maniobra de estacionamiento no programable. 42 43