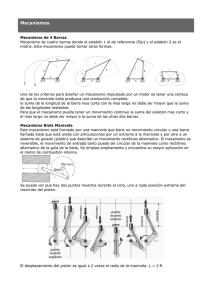
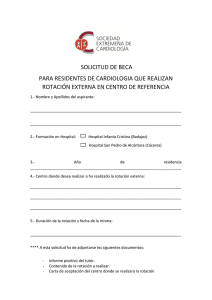
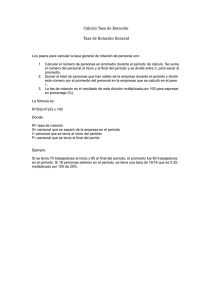
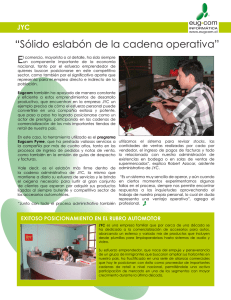
Departamento de Ingeniería Mecánica Academia de Mecánica LABORATORIO DE MECANISMOS Práctica No. 1 "Conceptos generales de los mecanismos" GRUPO: 6MV12 Integrantes: Hernández Yáñez Vianey Kandy Díaz Sánchez Alan Aher Ramirez Bartolón Edgar Feria Hernández Jafet Objetivo: Al finalizar esta práctica, el alumno se habrá familiarizado con los mecanismos de uso más común en la industria, conociendo el movimiento que los caracteriza y los tipos de pares cinemáticos que permiten tal movimiento. Conceptos teóricos requeridos: Para que esta práctica se te facilite, las definiciones y/o conceptos mínimos que requieres son: 1. Máquina y mecanismo. - ¿Son iguales? ¿Por qué? No son iguales ya que, las maquinas son dispositivos que utilizan al modificar, transmitir y dirigir fuerzas para llevar a cabo un objetivo específico y un mecanismo es una parte mecánica de una máquina, cuya función es transmitir movimiento y fuerza de una fuente de potencia a una salida. Es el corazón de la máquina. 2. Armadura y eslabón. - ¿Para qué sirven? ¿Se pueden clasificar? Las armaduras son estructuras estacionarias que se hallan constituidas por elementos rectos sujetos a dos fuerzas, dirigidas a lo largo del eje del elemento, que están conectados únicamente en sus extremos mediante pernos. Proporciona una solución práctica y económica para muchas situaciones de ingeniería, en especial para el diseño de puentes y edificios. Se clasifican por: Armaduras simples. Armaduras por el método de nodos. Armaduras en el espacio. Armaduras por el método de secciones. Armaduras compuestas. Un eslabón es un cuerpo rígido que posee al menos dos nodos, siendo éstos los puntos de unión con otros eslabones. El número de nodos le da s nombre al eslabón: binario, terciario, cuaternario, etc. 3. Pares cinemáticos. - ¿Qué son? ¿Cómo se clasifican? Los pares cinemáticos se dividen en clases, según el número de grados de libertad que poseen. El par se considera de primera clase si dispone de un grado de libertad, de segunda clase si dispone de dos grados de libertad y así sucesivamente. Rotación. Prismático. Helicoidal. Cilíndrico. Esférico. Planar. 4. Nomenclatura de un par cinemático. ¿Es necesario conocerla? ¿Por qué? Es necesario saber la nomenclatura ya que con ella se puede llevar a cabo la unión de elementos que limita unos movimientos relativos y admite otros. El numero movimientos limitados lineales, a lo largo de un eje coordenado dado, o angulares en torno a un eje de coordenados dado se denomina clase de par y se designa por cifras romanas. Desarrollo de la práctica: 1. Mecanismo de cuatro barras Diagrama unifilar (1) Eslabón fijo (2) Eslabón motriz (3) Eslabón conector (4) Eslabón de salida (A) Par rotacional entre barra 2 y3 (B) Par rotacional entre barra 3 y 4 (0) Par rotacional entre barra 2 y barra fija (0°) Par rotacional entre barra 4 y barra fija Dentro del movimiento producido ´podemos encontrar un par cinemático de rotación al no tener limitaciones en los eslabones El mecanismo de cuatro barras es una combinación de cuatro eslabones, uno designado como la bancada y conectado por cuatro uniones de perno, visto de otra forma, es una cadena cinemática cerrada, de esta se pueden obtener diferentes mecanismos (o inversiones cinemáticas), según cual sea la barra que se fija a tierra Aplicaciones: Es un eslabonamiento muy simple y con muchas aplicaciones en la vida cotidiana, una de ellas es en el limpiaparabrisas, bisagra para ventana, en la apertura y cierre de la cajuela de un auto, inclusive de ahí parte la idea de la garra de excavadora 2. Mecanismo de junta universal Diagrama unifilar (E1) Eje de rotación 1 (O) Cruceta de unión (E2) Eje de rotación transmitida En este mecanismo se poseen dos tipos de pares cinemáticos, el par de rotación y par prismático También conocido como cardan, es un componente mecánico que permite unir dos ejes que giran en un ángulo diferente respecto uno del otro, su objetivo es transmitir una fuerza de rotación de un eje a otro con cierto ángulo de diferencia Se constituye de dos horquillas agujereadas colocadas a 90 grados una con respecto a la otra, y cada una acoplada rígidamente a los ejes a unir. Las dos horquillas están unidas a través de una pieza en forma de cruz conocida como cruceta, los extremos de la cruceta se introducen en los agujeros de las horquillas y se apoyan en sus respectivos cojinetes de rodillos. Esta cruceta hace que uno de los árboles sea arrastrado cuando la otra gira. Aplicaciones: Es común ver este mecanismo en las flechas de transmisión de automóviles con tracción trasera, también como juntas para transmisión en máquinas siderúrgicas, en herramientas como dados y matracas con este mecanismo. 3. Mecanismo de retorno rápido Diagrama unifilar (1) Eslabón fijo (2) Eslabón de retorno o riel (3) Manivela de acción (4) Carro guiado Los mecanismos de retorno rápido tienen un avance más rápido en una dirección que en la otra, cuando son impulsados a velocidad constante con un actuador giratorio. Está compuesta de mecanismos simples de eslabones como el mecanismo de4 barras y el mecanismo biela-manivela-corredera. Existen varios tipos de mecanismos de retorno: Eslabón de arrastre, Whitworth, cepillo de manivela, biela-manivela-corredera descentrado. En él, se presenta un par cinemático prismático, ya que solamente puede deslizarse a lo largo de un riel. Aplicaciones: Es común verlo en el mecanismo de una licuadora, sujeción de piezas soldadas, doblaje de cajas de cartón, en una máquina de embalaje, en máquinasherramienta que requieren una carrera de corte lento y una de retorno rápido. 4. Mecanismo de palanca articulada Los mecanismos articulados refieren a eslabones como manivelas, bielas, palancas unidas mediante pares ya sean giratorios o deslizantes. Su función es obtener movimiento giratorio, oscilante o deslizante de la rotación. Diagrama unifilar: Par cinemático: Puede definirse como la unión móvil de dos cuerpos o elementos, cuyo movimiento relativo queda mutuamente limitado. Un conjunto de piezas rígidamente unidas entre sí constituye un eslabón de un mecanismo. Los pares cinemáticos se dividen en clases, según el número de grados de libertad que poseen. El par se considera de primera clase si dispone de un grado de libertad, de segunda clase si dispone de dos grados de libertad y así sucesivamente. Aplicación: Las aplicaciones industriales pueden ser muy variadas, pueden ir desde una prensa hidráulica de palanca articulada hasta palancas articuladas de afloje 5. Mecanismo de yugo escocés Diagrama unifilar 1 bancada 2 eslabón 3 corredera 4 corredera a par inferior b par inferior c par inferior d par inferior Aplicaciones Es común encontrarlos en actuadores para válvulas de control, regulación de presión en gasoductos, motores Bourke y SyTech, en motores neumáticos de aire comprimido para mover los cabrestantes, motores de inyección estratificada. 6. Mecanismo de leva Diagrama unifilar 1 eje 2 leva 3 corredera a par inferior b par inferior c par inferior Aplicaciones Cuando era preciso coordinar los distintos procesos dinámicos complejos que tienen lugar en las máquinas de funcionamiento cíclico se utilizaban los discos de levas mecánicos. En el control de válvulas del sistema de inyección de un motor de 4 tiempos. Industria del embalaje. Industria maderera. Técnica de transporte. Tecnología de manipulación. Tecnología de máquinas impresoras 7. Mecanismo de tren de engranes Un tren de engranajes es un sistema formado por varios engranajes conectados entre sí. Los trenes de engranajes se emplean para conseguir mecanismos de transmisión con características que no podrían conseguirse con un sólo engranaje Diagrama Unifilar: Tipo de pares cinemáticos contenidos y elementos que los forman: Este mecanismo tiene tanto número de pares cinemáticos como numero de engranes, ya que cada uno posee un par cinemático de revoluta. El par cinemático de revoluta permite solo un movimiento de giro de un eslabón con respecto al otro. Su símbolo es eslabón con respecto al otro. Su símbolo es “R” y p “R” y posee un grado de libertad. osee un grado de libertad. Aplicación: Un tren de engranes es una serie de conjuntos de engranes acoplados. Los trenes de engranes se utilizan comúnmente para lograr reducciones de velocidad significativos. Muchas fuentes de potencia mecánica, como los motores de combustión interna, las turbinas y los motores eléctricos, operan en forma eficiente a altas velocidades (1800 a 10000 rpm). Muchas aplicaciones de esta potencia, como las puertas automáticas de los estacionamientos, las ruedas impulsoras de los automóviles y los ventiladores de techo, requieren bajas velocidades (10 a 100 rpm) para su operación. 8. Mecanismo de cruz de malta Si observas el funcionamiento del mecanismo, te darás cuenta de que la cruz permanece durante la mayor parte del recorrido del volante bloqueada. Tan solo cuando la leva engarza el pivote con la hendidura de la cruz ésta se encuentra libre y puede girar. El avance del pivote en la ranura de la cruz, la arrastra, provocando que ésta gire hasta que vuelve a desengarzarse el pivote de la leva, de la hendidura de la cruz. Hasta casi el final de la nueva revolución el volante bloquea de nuevo a la cruz, hasta engarzar en la siguiente hendidura de la cruz; de forma que por cada vuelta que gira el árbol motor, la cruz avanza el ángulo formado por los ejes de dos hendiduras consecutivas de la cruz. Elementos que la conforman y tipo de movimiento que realiza Leva: Movimiento de rotación Rueda motriz: Movimiento de rotación Perno: Sin movimiento Rueda conductora: Rotación intermitente Eje conductor: Permite la rotación de la rueda motriz Eje conducido: Permite la rotación de la rueda conductora Una aplicación de la rueda de Ginebra son los proyectores de cine. La película no corre continuamente en el proyector, sino que avanza fotograma a fotograma, permaneciendo frente a la lente 1/24 de segundo. Este movimiento intermitente se consigue utilizando la rueda de Ginebra. 9. Mecanismo biela - manivela - corredera “El movimiento de abajo, si bien es igual en fuerza, no lo es en movimiento. Este movimiento es digno de ser alabado, tanto por la facilidad de su movimiento, como por la sencillez de su ejecución”. Explicación actualizada. El giro manual de la manivela acciona un conjunto de tornillo sinfín y corona. La corona transmite su movimiento a través de un mecanismo de bielamanivela a una corredera que se desplaza con un movimiento horizontal alterno a través de una guía. Este mecanismo es el punto de partida de los sistemas que aprovechan el movimiento giratorio de un eje o de un árbol para obtener movimientos lineales alternativos o angulares, pero también es imprescindible para lo contrario: producir giros a partir de movimientos lineales alternativos u oscilantes. Aplicación: Tiene numerosas aplicaciones, comenzando por los motores a explosión, el mando de la barra de corte de las plataformas recolectoras, clasificadoras de granos, mando de limpieza de mando de limpieza de las cosechadoras. CONCLUSIONES En este trabajo se ha descrito el desarrollo de una herramienta que muestra el movimiento de un mecanismo biela – manivela – corredera, cuatro barras, junta universal, retorno rápido, palanca articulada, yugo escocés, leva, tren de engranes y cruz de malta bajo diferentes condiciones. El modelo cinemático de posición presentado facilita la enseñanza y el aprendizaje de conceptos asociados a la cinemática de cuerpos rígidos, por observación facilita la perciba los cambios que induce en cada simulación. Dicho análisis es exclusivo para la posición.