FLAC and Numerical Modeling in Geomechanics 2003 Proceedings of the 3rd International FLAC Symposium, Sudbury, Canada, 22-24 October 2003 ( PDFDrive )
Anuncio
")
09069-Prelims.qxd
8/12/03
2:07 PM
Page I
FLAC AND NUMERICAL MODELING IN GEOMECHANICS
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-Prelims.qxd
8/12/03
2:07 PM
Page III
PROCEEDINGS OF THE THIRD INTERNATIONAL FLAC SYMPOSIUM,
21–24 OCTOBER 2003, SUDBURY, ONTARIO, CANADA
FLAC and Numerical Modeling
in Geomechanics
Edited by
Richard Brummer & Patrick Andrieux
Itasca Consulting Canada Inc., Sudbury, Ontario, Canada
Christine Detournay & Roger Hart
Itasca Consulting Group Inc., Minneapolis, Minnesota, USA
A.A. BALKEMA PUBLISHERS
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
LISSE / ABINGDON / EXTON (PA) / TOKYO
09069-Prelims.qxd
8/12/03
2:07 PM
Page IV
Cover picture:
The “Big Nickel” is a famous landmark and symbol of Sudbury, the “Nickel Mining
Capital of the World”.
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
All rights reserved. No part of this publication or the information contained herein may be reproduced,
stored in a retrieval system,or transmitted in any form or by any means, electronic, mechanical,
by photocopying, recording or otherwise, without written prior permission from the publisher.
Although all care is taken to ensure the integrity and quality of this publication and the information
herein, no responsibility is assumed by the publishers nor the author for any damage to property or
persons as a result of operation or use of this publication and/or the information contained herein.
Published by: A.A. Balkema, a member of Swets & Zeitlinger Publishers
www.balkema.nl and www.szp.swets.nl
ISBN 90 5809 581 9
Printed in the Netherlands
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-Prelims.qxd
8/12/03
2:07 PM
Page V
FLAC and Numerical Modeling in Geomechanics, Brummer et al. (eds)
© 2003 Swets & Zeitlinger, Lisse, ISBN 90 5809 581 9
Table of contents
Preface
IX
Organisation
XI
Constitutive models
Compensation grouting analysis with FLAC3D
X. Borrás, B. Celada, P. Varona & M. Senís
3
An automated procedure for 3-dimensional mesh generation
A.K. Chugh & T.D. Stark
9
A new constitutive model based on the Hoek-Brown criterion
P. Cundall, C. Carranza-Torres & R. Hart
17
A study of compaction band formation with the Double-Yield model
C. Detournay, P. Cundall & J. Parra
27
A new viscoplastic model for rocks: application to the Mine-by-Test of AECL-URL
F. Laigle
35
Prediction of deformations induced by tunneling using a time-dependent model
A. Purwodihardjo & B. Cambou
45
Modeling of anhydrite swelling with FLAC
J.M. Rodríguez-Ortiz, P. Varona & P. Velasco
55
Scenario testing of fluid-flow and deformation during mineralization: from simple to
complex geometries
P.M. Schaubs, A. Ord & G.H. German
Constitutive models for rock mass: numerical implementation, verification and validation
M. Souley, K. Su, M. Ghoreychi & G. Armand
63
71
Slope stability
A parametric study of slope stability under circular failure condition by a numerical method
M. Aksoy & G. Once
83
Numerical modeling of seepage-induced liquefaction and slope failure
S.A. Bastani & B.L. Kutter
91
Complex geology slope stability analysis by shear strength reduction
M. Cala & J. Flisiak
99
Analysis of hydraulic fracture risk in a zoned dam with FLAC3D
C. Peybernes
103
Mesh geometry effects on slope stability calculation by FLAC strength reduction method –
linear and non-linear failure criteria
R. Shukha & R. Baker
109
3D slope stability analysis at Boinás East gold mine
A. Varela Suárez & L.I. Alonso González
117
V
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-Prelims.qxd
8/12/03
2:07 PM
Page VI
Underground cavity design
The effect of tunnel inclination and “k” ratio on the behavior of surrounding rock mass
M. Iphar, M. Aksoy, M. Yavuz & G. Once
127
Numerical analysis of the volume loss influence on building during tunnel excavation
O. Jenck & D. Dias
135
Application of FLAC3D on HLW underground repository concept development
S. Kwon, J.H. Park, J.W. Choi & W.J. Cho
145
Numerical simulation of radial bolting: Application to the Tartaiguille railway tunnel
F. Laigle & A. Saïtta
153
Recent experiences of the prediction of tunneling induced ground movements
C. Pound & J.P. Beveridge
161
Numerical modeling of remedial measures in a failed tunnel
Y. Sun & P.J.N. Pells
169
Mining applications
Sill pillar design at the Niobec mine using FLAC3D
P. Frenette & R. Corthésy
181
Stability analyses of undermined sill mats for base metal mining
R.K. Brummer, P.P. Andrieux & C.P. O’Connor
189
FLAC numerical simulations of tunneling through paste backfill at Brunswick Mine
P. Andrieux, R. Brummer, A. Mortazavi, B. Simser & P. George
197
FLAC3D numerical simulations of ore pillars at Laronde Mine
R.K. Brummer, C.P. O’Connor, J. Bastien, L. Bourguignon & A. Cossette
205
Modeling arching effects in narrow backfilled stopes with FLAC
L. Li, M. Aubertin, R. Simon, B. Bussière & T. Belem
211
FLAC3D numerical simulations of deep mining at Laronde Mine
C.P. O’Connor, R.K. Brummer, P.P. Andrieux, R. Emond & B. McLaughlin
221
Three-dimensional strain softening modeling of deep longwall coal mine layouts
S. Badr, U. Ozbay, S. Kieffer & M. Salamon
233
FISH functions for FLAC3D analyses of irregular narrow vein mining
H. Zhu & P.P. Andrieux
241
Soil structure interaction
A calibrated FLAC model for geosynthetic reinforced soil modular block walls at end
of construction
K. Hatami, R.J. Bathurst & T. Allen
251
Three-dimensional modeling of an excavation adjacent to a major structure
J.P. Hsi & M.A. Coulthard
261
Pile installation using FLAC
A. Klar & I. Einav
273
Axial tension development in the liner of a proposed Cedar Hills regional municipal solid
waste landfill expansion
F. Ma
VI
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
279
09069-Prelims.qxd
8/12/03
2:07 PM
Page VII
The usability analyses of HDPE leachate collection pipes in a solid waste landfill
F. Ma
287
FLAC numerical simulations of the behavior of a spray-on liner for rock support
C.P. O’Connor, R.K. Brummer, G. Swan & G. Doyle
295
A numerical study of the influence of piles in the passive zone of embedded retaining walls
T.Y. Yap & C. Pound
301
Dynamic and thermal analysis
A practice orientated modified linear elastic constitutive model for fire loads and its
application in tunnel construction
E. Abazović & A. Amon
313
Seismic liquefaction: centrifuge and numerical modeling
P.M. Byrne, S.S. Park & M. Beaty
321
Modeling the dynamic response of cantilever earth-retaining walls using FLAC
R.A. Green & R.M. Ebeling
333
VII
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-Prelims.qxd
8/12/03
2:07 PM
Page IX
FLAC and Numerical Modeling in Geomechanics, Brummer et al. (eds)
© 2003 Swets & Zeitlinger, Lisse, ISBN 90 5809 581 9
Preface
The first two International FLAC Symposia were held in Minneapolis (USA) in September 1999, and in Lyon
(France) in October 2001. In 2003, the third International Symposium on FLAC and Numerical Modeling in
Geomechanics returned to North America and was held in Sudbury (Ontario, Canada) from October 21 to
October 24, 2003, with two days of short courses before the symposium.
Technical contributions to the conference were received from a wide range of different disciplines, representing virtually the entire globe. A volunteer Technical Committee reviewed the papers, and where necessary
clarifications were suggested to the authors prior to finalization of their manuscripts.
The contributions in this volume cover seven main topics:
•
•
•
•
•
•
•
Constitutive Models
Slope Stability
Underground Cavity Design
Mining Applications
Soil Structure Interaction
Dynamic Analyses
Thermal Analyses
The FLAC conferences provide all FLAC and FLAC3D users with an opportunity to meet and learn from each
other and from the people who develop the code. Conversely, they also allow Itasca staff members to learn from
the practical experiences of code users “out there in the real world”. These interactions improve our collective
knowledge and allow us to improve the performance of these numerical models in simulating the behavior of
geomaterials. These proceedings contain a comprehensive collection of FLAC & FLAC3D applications – case
studies as well as research presentations. We believe that this publication will help users by documenting a valuable resource for the solution of geomechanical problems.
The compilation presented here would not have been possible without the efforts of our authors and our Technical
Committee, and we thank them. We particularly thank and recognize the efforts of Michele Nelson, who served as
an extremely capable and efficient Technical Editor.
Richard Brummer
Patrick Andrieux
Itasca Consulting Canada Inc.
Roger Hart
Christine Detournay
Itasca Consulting Group Inc.
IX
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-Prelims.qxd
8/12/03
2:07 PM
Page XI
FLAC and Numerical Modeling in Geomechanics, Brummer et al. (eds)
© 2003 Swets & Zeitlinger, Lisse, ISBN 90 5809 581 9
Organisation
Conference Technical Committee:
The following individuals provided technical input to the conference, and scientific
overview and reviews of the abstracts and papers.
Patrick Andrieux, Itasca Consulting Canada Inc.
Daniel Billaux, Itasca Consultants SA
Richard Brummer, Itasca Consulting Canada Inc.
Peter Cundall, Itasca Consulting Group Inc.
Christine Detournay, Itasca Consulting Group Inc.
Samantha Espley, INCO Limited
Roger Hart, Itasca Consulting Group Inc.
Ugur Ozbay, Colorado School of Mines
Chris Pound, Mott MacDonald Limited
Graham Swan, Falconbridge Limited
XI
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-01.qxd 08/11/2003 20:13 PM Page 1
Constitutive models
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-01.qxd 08/11/2003 20:13 PM Page 3
FLAC and Numerical Modeling in Geomechanics, Brummer et al. (eds)
© 2003 Swets & Zeitlinger, Lisse, ISBN 90 5809 581 9
Compensation grouting analysis with FLAC3D
X. Borrás
Gestió D’Infrastructures SA (GISA), Barcelona, Spain
B. Celada
Geocontrol SA, Madrid, Spain
P. Varona & M. Senís
Itasca Consultores SL, Asturias, Spain
ABSTRACT: The Barcelona Metro Line 3 extension was excavated crossing 6.5 meters below a main water
supply pipe. Compensation grouting was used to minimize the deformations in the gallery. A FLAC3D model
was developed to investigate the efficiency of this process. The model was first calibrated to reproduce the
extensometer measurements and was later re-run without the compensation grouting in order to assess the
effectiveness of such treatment.
2.2
1 INTRODUCTION
Excavation sequence
The numerical model considers the sequential excavation of the metro tunnel:
The Barcelona Metro Line 3 extension was excavated
crossing 6.5 meters below a main water supply pipe
(Borrás et al. 2001). This is one of the two pipes of
Aigües Ter-Llobregat (ATLL) which supply water to
the city of Barcelona.
Due to the importance of this water pipe, during
the construction of the tunnel, compensation grouting
was used to minimize the deformations induced by
the excavation process in the existing gallery that
contains the water pipe.
A FLAC3D model simulating the whole excavation
sequence and the compensation grouting process has
been developed in order to evaluate the effects of the
construction and the treatment in the pipe, calibrating
the model with the actual instrumentation results
obtained during the excavation. The instrumentation
installed consisted of 17 rod extensometers located
0.5 m below the bottom of the ATLL gallery.
– Excavation of the heading in steps of 1 m length
RodExtensometer
t
er
location
i
20
20m
m
0.5 m
0.5
m
6.5
6.5m
m
2
2.1
FLAC
3D
In
Injection depth
MODEL
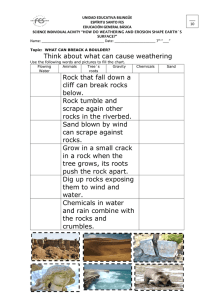
Geometry of the model
Figure 1 presents the problem geometry with the
dimensions of both tunnels and their location. The
FLAC3D model (Figs. 2 & 3) reproduces this geometry.
In plan view the pipe gallery forms a 35° angle with
the axis of the tunnel (Fig. 4).
Figure 1. Problem description.
3
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
4.7 m
4.7
m
09069-01.qxd 08/11/2003 20:13 PM Page 4
Figure 2.
FLAC3D model. General view.
Figure 4.
Figure 3.
FLAC3D model. Plan view.
FLAC3D model. Tunnels geometry.
Figure 5. Excavation sequence.
– Installation of the support: shotcrete with a thickness
of 30 cm and TH-29 steel arches.
– Installation of a 15 cm thick shotcrete lining and
provisional invert, 10 m behind the excavation face.
Figure 5 shows a detail of the excavation sequence
followed in the model.
2.3
Material properties
The geological profile assumed is shown in Figure 6.
The Mohr-Coulomb constitutive model has been
assigned to all the soils. The properties assumed are
shown in Table 1.
Both the shotcrete and the lining have been modeled using regular elements with an elastic constitutive model. The aging of the shotcrete has been
simulated by the Young Modulus evolution law shown
in Figure 7 (based on Estefanía 2000).
Figure 6. Geological profile.
4
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-01.qxd 08/11/2003 20:13 PM Page 5
Table 1. Geotechnical properties assigned to the soils.
Quaternary
Natural fills
Weathered Granite (V)
Weathered Granite (IV)
Weathered Granite (II/III)
E
(MPa)
v
(°)
c
(t/m2)
(t/m3)
50
30
75
100
300
0.33
0.35
0.30
0.30
0.25
25
32
37
37
37
1.5
1.0
1.5
2.8
7.5
2.1
2.0
2.2
2.3
2.6
4.0E+04
3.5E+04
E (MPa)
3.0E+04
y = 6644.4Ln(x) + 11076
R2 = 0.9262
2.5E+04
2.0E+04
1.5E+04
1.0E+04
5.0E+03
0.0E+00
0
5
10
15
20
25
30
35
Distancia al frente (m)
Figure 7. Hardening law applied to the concrete.
Figure 9. Location of drills and sleeves in the model.
04 05 06 07 08 09 10 11 12 13 14 15 16 17 18
19
The methodology used for the simulation of the
injection process is based in the bulb expansion
model proposed by Buchet et al. (1999). According to
them the injection effect can be modeled by increasing the volume of the elements in which the injection
is made. This volume increment is carried out applying
some “fictitious” hydrostatic stresses in the element,
which makes it expand.
These stresses are applied instantaneously, initializing an hydrostatic stress increment of the element as
pulses and then reaching a mechanical equilibrium.
This process is repeated until the volumetric strain
induced in the element is the one corresponding to a
fraction of the volume injected. The volumetric strain
increment due to the injection is defined by:
20
03
21
02
01
Figure 8. Drills and sleeves location.
2.4
Simulation of the compensation grouting
Compensation grouting injections consist of a mixture of cement and bentonite. To simulate these injections a methodology which reproduces the injection
process carried out during the real construction has
been developed. Figure 8 shows a plan view of the
treatment area with the location of the drills and
sleeves used.
This real geometry has been reproduced in the
FLAC3D model. Figure 9 shows the location of all
the drills considered and the sleeves used in one of
the injection cycles.
(1)
where Vi is the injected volume, V0 is the initial volume of the element and is the efficiency of the
injection. The process followed during the injection
modeling is shown in Figure 10.
Figure 11 shows, as an example of the process, the
increments applied to the vertical stress and their later
5
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-01.qxd 08/11/2003 20:13 PM Page 6
T
v Vi
V0
FLAC 3D 2.00
Step 9271
18:48:40 Mon Nov 13 2000
Deformacion volumetrica ⴛ10^-2
5.0
History
INI Hydrostatic stress
1Volumetric Strain Inc. Zone 113
Line style
1.347e-003 <-> 5.443e-002
4.5
Vs.
4.0
Step
1.000e+001 <-> 9.270e+003
Calculation of v produced
3.5
3.0
2.5
2.0
no
T
v v
1.5
1.0
yes
0.5
End of injection
Itasca Consulting Group, Inc.
Minneapolis, MN USA
1.0
2.0
3.0
4.0
5.0
6.0
NⴗPasos ⴛ10^3
7.0
8.0
9.0
Figure 10. Modeling the injection process.
Figure 12. Evolution of the volumetric strain.
FLAC3D 2.00
Step 9271
18:50:04 Mon Nov 13 2000
Tension Vertical ⴛ10^5
FLAC 3D 2.00
1.394
Step 54106 Model Projection
09:45:05 Tue Nov 14 2000
History
Rev 5 tension_media (FISH function)
Line style
1.392
1.375e+005 <-> 1.396e+005
Vs.
Step
1.390
1.000e+001 <-> 9.270e+003
1.388
1.386
Rotation:
X : 90.000
Y : 0.000
Z : 0.000
Size: 4.830e+001
Plane Origin:
X: 0.000e+000
Y: 0.000e+000
Z: 1.077e+001
Plane Orientation:
Dip: 0.000
DD: 0.000
Contour of Z-Displacement
Plane: on
0.0000e+000 to 5.0000e-004
5.0000e-004 to 1.0000e-003
1.0000e-003 to 1.5000e-003
1.5000e-003 to 2.0000e-003
2.0000e-003 to 2.5000e-003
2.5000e-003 to 3.0000e-003
3.0000e-003 to 3.5000e-003
3.5000e-003 to 4.0000e-003
4.0000e-003 to 4.5000e-003
4.5000e-003 to 5.0000e-003
5.0000e-003 to 5.5000e-003
5.5000e-003 to 5.6775e-003
Interval = 5.0e-004
1.384
1.382
1.380
1.378
1.376
Itasca Consulting Group, Inc.
Minneapolis, MN USA
Center:
X: 0.000e+000
Y: 4.000e+001
Z: 4.885e+000
Dist: 2.964e+002
Taladros
1.0
2.0
3.0
4.0
5.0
6.0
NⴗPasos ⴛ10^3
7.0
8.0
Itasca Consulting Group, Inc.
Minneapolis, MN USA
9.0
Figure 11. Vertical stresses during the injection process.
Figure 13. Vertical displacement increments in one of the
injection cycles, at extensometer depth.
relaxation until the equilibrium is reached. Figure 12
presents the evolution of the volumetric strain, showing the successive increments produced until the
strain corresponding to the injected volume is reached.
Following the real injection scheme, the drills and
sleeves that are injected every cycle are reproduced in
the FLAC3D model, finding the closest element to the
position of the sleeve and proceeding in the way
described above. As an example of the modeling,
Figure 13 shows the increment of the vertical displacements (at extensometer depth) produced during
one of the injection cycles (the location of the sleeves
injected in the cycle is shown too). Figure 14 shows,
for the same cycle, the heave produced at the ground
surface.
These two figures show how the heave is less pronounced but affects a larger area as the distance from
the sleeves increases.
FLAC 3D 2.00
Step 54106 Model Projection
09:46:43 Tue Nov 14 2000
Rotation:
X: 90.000
Y: 0.000
Z: 0.000
Size: 4.830e+001
Plane Origin:
X: 0.000e+000
Y: 0.000e+000
Z: 2.470e+001
Plane Orientation:
Dip: 0.000
DD: 0.000
Contour of Z-Displacement
Plane: on
0.0000e+000 to 2.5000e-005
2.5000e-005 to 5.0000e-005
5.0000e-005 to 7.5000e-005
7.5000e-005 to 1.0000e-004
1.0000e-004 to 1.2500e-004
1.2500e-004 to 1.5000e-004
1.5000e-004 to 1.7500e-004
1.7500e-004 to 2.0000e-004
2.0000e-004 to 2.2500e-004
2.2500e-004 to 2.5000e-004
2.5000e-004 to 2.7500e-004
2.7500e-004 to 3.0000e-004
3.0000e-004 to 3.2500e-004
3.2500e-004 to 3.5000e-004
3.5000e-004 to 3.5961e-004
Itasca Consulting Group, Inc.
Minneapolis, MN USA
Figure 14. Vertical displacement increments in one of the
injection cycles, at ground surface.
6
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
Center:
X: 0.000e+000
Y: 4.000e+001
Z: 4.885e+000
Dist: 2.964e+002
09069-01.qxd 08/11/2003 20:13 PM Page 7
3.2
3 RESULTS
An average grouting efficiency can be defined as
the ratio of difference between the volume of the settlement trough without (VNI
s ) and with compensation
VsWI to the injected volume:
Comparison with instrumentation
Figure 15 shows the location of the 17 rod extensometers used to monitor the compensation grouting
process. The model was first calibrated varying the
grout efficiency , in order to match the actual measurements with the calculated values, achieving a
good fit. A second run was made without the compensation grouting in order to calculate what deformations would have been induced without any
treatment.
Figure 16 shows the evolution of extensometer E4
located outside the treated area. A vertical displacement of 10 mm was measured and without grouting,
12 mm are predicted.
Figure 17 shows the evolution of extensometer E6
located in a relatively stiff material within the treated
area. Here 8 mm settlement was recorded compared
to 18 mm predicted without compensation grouting.
In a softer material, extensometer E10 (Fig. 18), the
difference between measured (8 mm) and predicted
without treatment (22 mm) is even larger.
FLAC3D2.00
Step 17228 Model Projection
10:34:27 Wed Nov15 2000
Rotation:
X: 90.000
Y:0.000
Z: 0.000
Size: 4.830e+001
Plane Origin:
X: 0.000e+000
Y: 0.000e+000
Z: 1.077e+001
Plane Orientation:
Dip: 0.000
DD: 0.000
In the present analysis the efficiency obtained has been:
(3)
This empirical parameter is crucial for predictive studies, and a sufficient database for a given soil type is
necessary before such analysis should be attempted.
3.3
E1
E4
Calculation of volume loss
The volume loss can be defined as the ratio of the volume of the settlement trough to the excavated volume.
Figure 19 shows the volume loss calculated along
the tunnel axis for both hypotheses (with and without
grouting). In both cases the volume loss depends on
E2
E3
E5
E13
Geología
Plane: on
1.111000e+007
1.880000e+007
2.884500e+007
Extensometer E6
Date
E6
E11
E9
E10
Taladros
0.002
E7
Vertical displacement (m)
Center:
X: 0.000e+000
Y: 4.000e+001
Z: 4.885e+000
Dist: 2.964e+002
(2)
E8
Extensometros
E12
E1B
Tunel
GaleriaATLL
E2B
E14
E3B
10/9
11/9
12/9
13/9
14/9
15/9
16/9
17/9
18/9
19/9
20/9
21/9
22/9
23/9
24/9
25/9
26/9
27/9
28/9
29/9
30/9
1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
11/10
12/10
13/10
14/10
15/10
16/10
17/10
18/10
19/10
20/10
21/10
22/10
23/10
3.1
Calculation of the efficiency
0.000
-0.002
-0.004
-0.006
-0.008
-0.010
-0.012
-0.014
-0.016
-0.018
Itasca Consulting Group, Inc.
Minneapolis, MN USA
-0.020
-0.022
Measured
Figure 15. Location of the rod extensometers.
FLAC
FLAC No Injections
Figure 17. Results obtained for extensometer E6.
Extensometer E4
Date
10/9
11/9
12/9
13/9
14/9
15/9
16/9
17/9
18/9
19/9
20/9
21/9
22/9
23/9
24/9
25/9
26/9
27/9
28/9
29/9
30/9
1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
11/10
12/10
13/10
14/10
15/10
16/10
17/10
18/10
19/10
20/10
21/10
22/10
23/10
10/9
11/9
12/9
13/9
14/9
15/9
16/9
17/9
18/9
19/9
20/9
21/9
22/9
23/9
24/9
25/9
26/9
27/9
28/9
29/9
30/9
1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
11/10
12/10
13/10
14/10
15/10
16/10
17/10
18/10
19/10
20/10
21/10
22/10
23/10
Extensometer E10
Date
0.002
0.000
0.000
- 0.002
-0.004
Vertical displacement (m)
Vertical displacement (m)
0.002
-0.002
-0.006
-0.008
-0.010
-0.012
-0.014
-0.016
-0.018
- 0.004
- 0.006
- 0.008
- 0.010
- 0.012
- 0.014
-0.016
- 0.018
-0.020
- 0.020
-0.022
- 0.022
Measured
FLAC
FLAC No Injections
Measured
FLAC No Injections
Figure 18. Results obtained for extensometer E10.
Figure 16. Results obtained for extensometer E4.
7
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
FLAC
Vsubsidence/Vexcavated (%)
09069-01.qxd 08/11/2003 20:13 PM Page 8
maximum values of 19 mm in the hypothesis without
treatment and 15 mm in the one with compensation
grouting. In the same figure the corresponding horizontal strains have been represented too. These
horizontal strains have been calculated as:
0.0
-0.3
No
Noinjections
injections
Injections
Injections
-0.5
-0.8
-1.0
-1.3
-1.5
-1.8
-2.0
-2.3
-2.5
1668 1673 1678 1683 1688 1693 1698 1703 1708 1713 1718 1723 1728 1733 1738 1743 1748
Chainage
(4)
Quaternary
Quaternary
where L is the initial distance between two points
along the gallery, and L is the distance once the displacement has occurred. The strains show low values
in both cases, although the induced tensile strains are
higher in the hypothesis with injections.
Natural
Natural
Fills
Fills
A.
V
A.Granite
GraniteV
A.A.Granite
GraniteIIVV
A.A.Granite
Granite
anit II–III
III
4 CONCLUSIONS
Figure 19. Volume loss analysis.
0
0.050
-2
0.025
-4
0.000
-6
-0.025
-8
-0.050
-10
-0.075
-12
-0.100
-14
-0.125
-16
-0.150
-18
-0.175
-20
-50 -45 -40 -35 -30 -25 -20 -15 -10 -5
– The expected grout efficiency (30%) was much
higher than the actual efficiency (10%).
– The expected volume loss (0.07–0.2%) was much
lower than the actual volume loss (1–2%).
– The expected volume to inject (13.7 m3) was much
lower than the actual volume injected (68 m3). Still
only partial compensation was achieved.
– According to the comparison between the model
with compensation grouting and the model without the treatment area has been insufficient.
– Numerical models should play an important role
in the design of compensation grouting providing
accurate estimates of the ground loss and of the
required treatment area.
Strain (mm/m)
Vertical displacement (mm)
The main conclusions that can be obtained from this
analysis are:
-0.200
0
5
10 15 20 25 30 35 40 45 50
Distance to the cross measured on the ATLL (m)
Injections
No Injections
Strain I.
Strain N.I.
Figure 20. Horizontal strains in the ATLL gallery bottom.
REFERENCES
the characteristics of the soil above the tunnel. So in the
area in which the tunnel is excavated in natural fill the
volume loss is about 2.4%; and as the tunnel runs
towards stiffer soils (weathered granite) this relation
decreases to 0.8%. These values agree with the ones
described in the literature. For example, Oteo (2000)
reports values of 1–2% for stiff clays and 1–5% for
granular soils above the water table.
The maximum effect of the compensation grouting
is a reduction of the volume loss of 0.4% from 1.2%
to 0.8% at chainage 1708.
3.4
Borrás, X., Pérez, A., Magro, J.A., Celada, B. & Varona, P.
2001. Construcción del tramo Montbau-Canyelles de la
Línea 3 del Metro de Barcelona. In Ingeopres N° 92,
Abril 2001, Madrid: 54–64.
Buchet, G. & Van Cotthem, A. 1999. 3D “Steady State”
numerical modeling of tunneling and compensation
grouting. In Detournay & Hart (eds), FLAC and
Numerical Modeling in Geomechanics; Proc. intern.
symp., Minneapolis, MN, 1–3 September 1999: 255–261.
Rotterdam: Balkema.
Estefania, S. 2000. Utilización de Métodos Numéricos en el
Proceso Constructivo. Proc. III Curso sobre Ingeniería
de Túneles. Madrid, 12–14 June 2000.
Oteo, C. 2000. Subsidencia producida por los túneles. In
Jimeno (ed), Manual de túneles y obras subterráneas.
U.D. Proyectos, E.T.S.I. Minas, U.P.M., Madrid.
Effects on the gallery
Figure 20 shows the vertical displacements produced
on the bottom of the ATLL gallery along its axis, with
8
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-02.qxd 08/11/2003 20:14 PM Page 9
FLAC and Numerical Modeling in Geomechanics, Brummer et al. (eds)
© 2003 Swets & Zeitlinger, Lisse, ISBN 90 5809 581 9
An automated procedure for 3-dimensional mesh generation
A.K. Chugh
Bureau of Reclamation, Denver, CO, USA
T.D. Stark
University of Illinois, Urbana, IL, USA
ABSTRACT: An automated procedure is presented to generate a 3-dimensional mesh for numerical analysis
of engineering problems. The procedure is simple, effective and efficient, and can be applied to represent complex
geometries and material distributions. A listing of the program that was used for the sample problem of a landfill
slide is included.
1 INTRODUCTION
2 CONCEPTUAL MODEL
One of the essential tasks in a 3-dimensional (3-D)
numerical analysis is to represent the geometry and distribution of materials in the numerical model. FLAC3D
provides means to facilitate mesh generation and the
built-in programming language FISH can be used to
develop and implement additional program instructions during execution of a data file.
In geotechnical engineering, surface geometry,
distribution of materials, and water table conditions
usually vary from one location to the next and pose a
difficult set of conditions to represent in a numerical
model. In order to facilitate the analysis of landslides,
a simple procedure was devised to represent complex
surface geometry, subsurface material horizons, and
water table conditions. The objectives of this paper are
to present:
The conceptual model for the generation of a 3-D
mesh follows the conventional procedure of portraying
spatial variations of materials in 3-D via a series
of 2-dimensional (2-D) cross-sections. This technique
is commonly used by engineers and geologists in
constructing visual models of complex geologic sites
where a number of 2-D cross-sections are used to represent the field conditions. In these representations, linear
variations between material horizons in consecutive 2D cross-sections are used to depict the 3-D spatial variability of a site. The accuracy of the representation is
improved by using closely spaced 2-D cross-sections.
The 3-D mesh generation procedure presented
herein follows the conventional practices used by engineers in constructing 2-D numerical meshes by hand
for geotechnical problems to be solved using methods
other than FLAC3D. For example, in the creation of a
2-D numerical model of a slope to be analyzed using
a limit-equilibrium based procedure, it is a common
practice to define profile lines via a set of data points
followed by specifications of their connectivities.
Also, in the creation of a 2-D model of a continuum to
be solved by a finite-element based procedure, it is a
common practice to discretize the continuum into
a network of zones; assign identification numbers
to the grid points; define the coordinates of the
grid points; and then specify the connectivity of
grid points.
1 a simple method to describe field geometry and
conditions for a 3-D numerical model of a slope
problem;
2 a simple procedure for automatic generation of a
3-D mesh; and
3 an illustration of the use of the procedure for analysis of a large slide in a landfill.
A listing of the program for the landfill slide is included
in the paper. This program listing is in the FISH language and uses some of the functions available in the
FISH library.
9
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-02.qxd 08/11/2003 20:14 PM Page 10
each profile line and the water table (for parallel
2-D cross-sections, y-coordinate shall have same
constant value between two consecutive crosssections).
2 The following steps are used for creating similar
sets of data at each of the 2-D cross-sections:
a From the data in step 1(c) above, select control
points that are of significance in defining the
profile lines in all of the 2-D cross-sections.
Tabulate the x-coordinates of these control points
in increasing order. For reference purposes, this
table is referred to as Table 100.
b Use of the “Interpolate” function expands the 2-D
cross-sectional data of step 1(c) by linear interpolation for all of the control points listed in
Table 100 for all of the profile lines and stores
the data in separate tables; assigns Table numbers in increasing order starting with the user
specified starting number and incrementing it by
1; assigns an identification number to each
point; and positions the points in the 3-D model
space. These tables contain the (x,z) coordinates
of expanded 2-D cross-sectional data. A sample
listing of the “Interpolate” function and its
dependency function “zz” in FISH language is
given in Figure 1. The starting table number used
in the sample problem data file is 200.
3 The following steps are used for creating zones in
the 3-D model space:
Thus, in the conceptual model for the generation of
a 3-D mesh in FLAC3D, use is made of defining a
series of 2-D cross-sections at representative locations
of a site; defining each of the 2-D sections as an
assemblage of data points with line-segment connections; and organizing the data for an efficient and
effective discretization of the volume.
3 WATER TABLE
The water table surface is specified using the water
table data of individual 2-D cross-sections and through
the use of 3-point planar polygons between consecutive
2-D cross-sections. This scheme allows incorporation
of non-coplanar variations in the water table surface
in the entire 3-D model.
4 DESCRIPTION OF THE PROCEDURE
In geotechnical engineering, the ground-surface
geo-metry is obtained using contour maps that are
prepared from land or aerial survey of the area. The
subsurface material horizons are estimated from geologic data and information obtained from exploratory
boring logs. The subsurface water conditions are estimated from field observations, piezometers installed
at various depths, and/or from water levels in borings.
Subsurface data are used to develop contour maps of
the subsurface geology and water conditions.
From these contour maps, the region-of-interest,
and the locations of significant cross-sections are
identified; information for 2-D cross-sections are
read and tabulated; and 2-D cross-sections are drawn
for an understanding of the site details and preparation
of input data for a 2-D analysis. In general, the crosssectional data for a site varies from one location to
the next. These variations may be caused by changes
in the ground surface and (or) in subsurface material
horizons, discontinuity of some materials, or a combination of these or some other variations.
In the proposed procedure, the following steps are
followed: (For ease of presentation, 2-D cross-sections
are assumed to lie in x-z plane and the x,y,z coordinate system follow the right hand rule.)
def zz
zz=table(t_n,xx)
end
def interpolate
loop j (js,je); profile line #s ; js is for the bottom, je is for top
dt_n=dt_n_s+j; dt_n is destination table number
loop i (is,ie); is is the first interpolation #,
; ie is the last interpolation #
xx=xtable (100,i); x-coordinate of the
;interpolation point
command
set t_n=j
end_command
table(dt_n,xx)=zz
id_pt=id_pt+1
x_pt=xtable(dt_n,i)
y_pt=y_pt
z_pt=ytable(dt_n,i)
command
generate point id id_pt x_pt y_pt z_pt
end_command
endloop
endloop
end
1 The following steps are used for creating an
orderly assemblage of field data for 3-D discretization of the continuum of the region-of-interest:
a On the site map, select values of x, y, and z coordinates that completely circumscribe the 3-D
region-of-interest;
b Mark locations of all significant 2-D crosssections oriented in the same and preferably parallel direction;
c For each 2-D cross-section, tabulate (x,y,z) coordinates of end-points of all line segments for
Figure 1. Listing of the “Interpolate” function and its
dependency function “zz” in FISH language.
10
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-02.qxd 08/11/2003 20:14 PM Page 11
zones desired for each interval in the x-direction.
Tabulate these values for all of the intervals in
the increasing x-direction. For reference purposes,
this table is referred to as Table 102. The number
of entries in Table 102 should be one less than
those in Table 100.
c Considering the spacing between the 2-D crosssections in the y-direction, select the number of
zones desired for each interval in the y-direction.
Tabulate these values for all of the intervals in the
increasing y-direction. For reference purposes,
this table is referred to as Table 103. The number
of entries in Table 103 should be one less than
the number of 2-D cross-sections.
d Considering the spacing of the profile lines in
the z-direction, select the number of zones desired
for each material horizon in the z-direction.
Tabulate these values for all of the intervals in
the increasing z-direction. For reference purposes,
this table is referred to as Table 104. The number
of entries in Table 104 should be one less than the
number of profile lines.
e Use of the “Fill_grid” function generates a
brick mesh and assigns a group name to each 3D volume zone. A sample listing of the
“Fill_grid” function in FISH language is given
in Figure 2.
a Tabulate the y-coordinates of the 2-D crosssections in increasing y-direction. For reference
purposes, this table is referred to as Table 101.
The number of entries in Table 101 should equal
the number of 2-D cross-sections marked in
step 1(b).
b Considering the spacing of x-coordinates of the
control points in step 2(a), select the number of
def fill_grid
i_n=table_size(102)
j_n=table_size(103)
k_n=table_size(104)
loop jy (1,j_n)
ny=xtable(103,jy)
p0_d=(jy-1)*(i_n+1)*(k_n+1)
loop kz (1,k_n)
nz=xtable(104,kz)
if kz=1 then
material='shale'
endif
if kz=2 then
material='ns'; native soil
endif
if kz=3 then
material='msw'; municipal solid waste
x_toe=xtable(105,jy)
endif
loop ix (1,i_n)
if kz=3 then
xx_toe=xtable(100,ix)
if xx_toe < x_toe then
material='mswt'
endif
endif
nx=xtable(102,ix)
p0_d=p0_d+1
p3_d=(p0_d+i_n+1)
p6_d=(p3_d+1)
p1_d=(p0_d+1)
p2_d=((i_n+1)*(k_n+1)+p0_d)
p5_d=(p2_d+(i_n+1))
p7_d=(p5_d+1)
p4_d=(p2_d+1)
command
generate zone brick size nx,ny,nz ratio 1,1,1 &
p0=point (p0_d) p3=point (p3_d) &
p6=point (p6_d) p1=point (p1_d) &
p2=point (p2_d) p5=point (p5_d) &
p7=point (p7_d) p4= point(p4_d) group material
end_command
if kz=3 then
material='msw'
endif
end_loop
p0_d=p0_d+1
end_loop
end_loop
end
5 COMMENTS
1 Use of a Brick mesh with an 8-point description is
versatile and allows for creation of degenerated brick
forms through the use of multiple points with different identification numbers occupying the same
(x,y,z) coordinate location in the 3-D model space.
2 During the development of the grid, it is possible to
assign group names to different segments of the
model. This information can be useful in modifying
the generated grid.
3 Expanding the (x,y,z) location data for all 2-D crosssections to a common control number of locations
via interpolations facilitates the programming of
the automatic grid-generation procedure.
4 In engineering practice, it is generally desirable
to analyze a few 2-D cross-sections at select locations prior to conducting a 3-D analysis. Because
development of data for 2-D cross-sections is
one of the steps for use of the proposed procedure,
it is relatively easy to conduct a 2-D analysis using
the 2-D cross-sectional data and the program
FLAC.
5 The program instructions listed in Figures 1 and 2
can be modified to accommodate geometry and
other problem details that are different or more
complex than those encountered in the sample
problem described in Section 6.
Figure 2. Listing of “FILL_GRID” function in FISH
language.
11
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-02.qxd 08/11/2003 20:14 PM Page 12
6 SAMPLE PROBLEM
The problem used to illustrate the proposed 3-D mesh
generation procedure is the 1996 slide in a waste containment facility near Cincinnati, Ohio (Stark & Eid
1998, Eid et al. 2000). Figure 3 is an aerial view of the
slide. Figure 4 is the plan view of the landfill and
shows the location of the sixteen cross-sections used
to construct a FLAC3D model of the site (the project
data shown are in Imperial units). There are three
material horizons bounded by four profile lines, and a
liquid level present at this site. Figure 5 shows the 2-D
cross-sectional views of the site at the 16-locations
prior to failure (the available project data were converted to SI units and this conversion lead to numerical values with fractional parts). Figure 6 shows a
partial listing of the data file for the sample problem
with the following details:
– Table 100 lists the x-coordinates of the 22 control
points considered significant from the sixteen 2-D
cross-sectional data.
– Table 101 lists the y-coordinates of the sixteen 2-D
cross-section locations.
– Table 102 lists the number of zones desired in each
of the 21 segments in the x-direction.
– Table 103 lists the number of zones desired in each
of the 15 segments in the y-direction.
– Table 104 lists the number of zones desired in each
of the 3 material horizons at the site.
– Table 105 lists the x-coordinates of the toe locations of the top profile line in the 2-D cross-sections
in the increasing y-direction.
Figure 3. Sample problem – aerial view of Cincinnati
landfill failure (from Eid et al. 2000). (Reproduced by permission of the publisher, ASCE).
For each cross-section, x- and z-coordinates for
data points defining the profile lines are recorded in
individual tables numbered as Table 1 for profile line
1 data, Table 2 for profile line 2 data, Table 3 for profile line 3 data, and Table 4 for profile line 4 data in
the data file shown in Figure 6. Profile lines are numbered from 1 to 4 in the increasing z-direction and each
profile line uses a different number of data points to
define the line. For cross-sections where the top profile line terminates in a vertical cut at the toe, the top
profile line was extended to x 0.
For each cross-section and for each of the four profile lines, the x-coordinate locations identified in Table
100 are used to create data by interpolation at each of
the 22 control points. For the sample problem, this
amounts to 88 pairs of (x,z) coordinates per crosssection, and the y-coordinate of the data points is read
from Table 101. Thus, the x-,y-, and z-coordinates
for all of the points defined and (or) interpolated
are known. Each point is assigned a numeric identity
number (id #) starting with one and incrementing by
one. The data points are located in the 3-D model
space using their id # and x-,y-, z-coordinates. This
task is accomplished using the “Interpolate” function
Figure 4. Plan view of the sample problem showing locations
of selected 2-D sections.
and its listing in FISH language is given in Figure 1.
At the end of this task, all of the defined and (or)
interpolated points with an assigned id # have been
located in the 3-D model space.
The connectivity of data points to define volume
discretization is accomplished in the function named
12
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-02.qxd 08/11/2003 20:14 PM Page 13
Figure 5. 2-D cross-sectional views of the sample problem.
“Fill_grid”. For each interval in the location of crosssections in the y-direction (Table 103), and for each
material horizon between the profile lines in the zdirection (Table 104), and for each interval in the
x-direction (Table 102), the values of number of
zones desired in the x, y, and z-direction and the id #s
of points in the 3-D model space are used in the
“GENERATE zone brick p0, p1, … p8” command of
13
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-02.qxd 08/11/2003 20:14 PM Page 14
table 4 0,251.46 91.14,280.42 107.90,283.46
table 4 144.48,286.51 169.77,289.56
table 4 194.46,292.61 332.54,338.33
table 4 348.08,338.33
interpolate
.
.
.
; station at y=307.85 m
set y_pt=307.85
table 2 erase
table 3 erase
table 4 erase
set dt_n_s=dt_n
table 2 0,254.08 348.08,254.08
table 3 0,259.08 348.08,259.08
table 4 0,261.08 29.87,265.18 185.93,268.22
table 4 348.08,307.24
interpolate
; Rumpke landfill site; Data are in metric units
set g=0,0,-9.81
; table 100 is for the x-coordinates of
; the desired 3-D grid
table 100 0,1 13.11,2 15.54,3 22.86,4 34.75,5
table 100 42.67,6 49.07,7 57.61,8 63.70,9
table 100 64.92,10 72.54,11 78.94,12 92.66,13
table 100 100.89,14 107.90,15 115.21,16
table 100 158.50,17 199.64,18 284.38,19
table 100 318.52,20 337.72,21 348.08,22
; table 101 is for y-coordinates of the
; 2-D cross-section locations
table 101 0,1 15.24,2 20.73,3 28.96,4 42.06,5
table 101 62.48,6 96.93,7 138.07,8 164.29,9
table 101 201.47,10 234.09,11 253.29,12
table 101 268.83,13 287.43,14 293.83,15
table 101 307.85,16
fill_grid
; table 102 is for the number of zones
; desired in the x-direction
table 102 2,1 1,2 1,3 2,4 1,5 1,6 1,7 1,8 1,9
table 102 1,10 1,11 2,12 1,13 1,14 1,15 5,16
table 102 5,17 10,18 4,19 2,20 2,21
delete range group mswt
; water surface
water den=1 table &
face 0,0,228.60 0,15.24,228.60 &
332.54,15.24,268.22 &
face 0,0,228.60 332.54,15.24,268.22 &
348.08,15.24,268.22 &
face 0,0,228.60 348.08,15.24,268.22 &
348.08,0,268.22 & ;interval # 1
face 0,15.24,228.60 0,20.73,228.60 &
340.77,20.73,268.22 &
face 0,15.24,228.60 340.77,20.73,268.22 &
348.08,20.73,268.22 &
face 0,15.24,228.60 348.08,20.73,268.22 &
332.54,15.24,268.22 &
face 332.54,15.24,268.22 348.08,20.73,268.22 &
348.08,15.24,268.22 &;interval # 2
.
.
.
face 0,293.83,259.08 0,307.85,259.08 &
63.70,307.85,259.08 &
face 0,293.83,259.08 63.70,307.85,259.08 &
348.08,307.85,268.22 &
face 0,293.83,259.08 348.08,307.85,268.22 &
63.70,293.83,259.08 &
face 63.70,293.83,259.08 348.08,307.85,268.22 &
348.08,293.83,268.22;interval # 15
; table 103 is for the number of zones
; desired in the y-direction
table 103 2,1 1,2 1,3 2,4 2,5 3,6 4,7 3,8 4,9
table 103 3,10 2,11 2,12 2,13 1,14 2,15
; table 104 is for the number of zones
; desired in the z-direction
table 104 5,1 3,2 10,3
; table 105 is for the x-coordinates of the
; receding toe
table 105 0,1 0,2 15.54,3 22.86,4 34.75,5
table 105 49.07,6 57.61,7 64.92,8 78.94,9
table 105 92.66,10 100.89,11 107.90,12
table 105 115.21,13 63.70,14 0,15
set is=1 ie=22
set js=1 je=4
set id_pt=0
set dt_n_s=200
; Station at y=0
set y_pt=0
table 1 -100,200 500,200
table 2 0,223.60 154.23,223.60 307.24,238.84
table 2 348.08,239.14
table 3 0,228.60 154.23,228.60 307.24,243.84
table 3 348.08,244.14
table 4 0,260.00 66.45,280.42 98.15,283.46
table 4 156.67,286.51 187.15,289.56
table 4 348.08,332.54
interpolate
save cin_3D_grid.sav
; station at y=15.24 m
set y_pt=15.24
table 2 erase
table 3 erase
table 4 erase
set dt_n_s=dt_n
table 2 0,223.60 163.07,223.60 306.02,238.84
table 2 348.08,240.67
table 3 0,228.60 163.07,228.60 306.02,243.84
table 3 348.08,245.67
Figure 6. Partial listing of the data file for the sample problem for FLAC3D.
14
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-02.qxd 08/11/2003 20:14 PM Page 15
2
3
4
5
6
7
8
9
Figure 7. 3-D mesh for the sample problem.
FLAC3D for a regular 8-noded brick mesh. The material
between the profile lines is assigned a group name for
ease of modifying the grid and for convenience in
assigning material properties and/or addressing them
for some other reason. This task is also accomplished
in the function named “Fill_grid” and its listing in FISH
language is given in Figure 2. Table 105 data are used
to assign a group name “mswt” to the zones past the
vertical cut which are later deleted using the DELETE
command with the range defined by the group name
“mswt”. At the end of this task, a 3-D grid of specification exists in the region-of-interest. For the sample
problem, the generated 3-D grid is shown in Figure 7.
The representation of continuity of the vertical cut at
the toe of the slope (as seen in 2-D cross-sections,
Figure 5) in the 3-D model can be improved by
increasing the number of 2-D cross-sections.
8 SUMMARY
To facilitate 3-D analyses using FLAC3D or other software, an automated procedure is presented to create
a 3-D mesh. The procedure utilizes commonly
used techniques for drawing 2-D cross-sections
and interpolation between 2-D cross-sections to
portray spatial variations of geometry and distribution of materials in 3-D.
REFERENCES
Eid, H.T., Stark, T.D., Evans, W.D. & Sherry, P.E. 2000.
Municipal solid waste slope failure. II Stability analyses.
Journal of Geotechnical and Geoenvironmental Engineering 126(5): 408–419.
Stark, T.D. & Eid, H.T. 1998. Performance of threedimensional slope stability methods in practice. Journal
of Geotechnical and Geoenvironmental Engineering
124(11): 1049–1060.
7 ADVANTAGES OF THE PROPOSED
PROCEDURE
1 The proposed procedure for describing 3-D field
conditions utilizes 2-D cross-sections, which are
essentially the same as commonly used by geologists and engineers to describe the field conditions.
15
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
Linear variation in geometry, material horizons,
and groundwater descriptions between known data
points is generally accepted.
Changes in field data can be incorporated in
the numerical model by updating the affected
tables.
New cross-sections can be introduced or old crosssections deleted and a new discretization of the
continuum made quickly.
Describing the spatial location of data in a 3-D
space followed by descriptions of their connectivity
is a simple yet powerful way of constructing a 3-D
numerical model for analysis purposes.
The proposed procedure produces regions with
acceptable geometries, i.e. no conflicts in connectivity.
Changes in discretization due to changes in field
data or due to numerical considerations can be
included in the proposed procedure efficiently and
a new discretization accomplished.
Number of discretized volume units in different
parts of the numerical model is estimated at the
start of the problem solving effort. If it becomes
necessary to change or refine the discretization,
very little effort is needed to change the tabular
data and the procedure is then rerun to obtain an
updated 3-D mesh.
A complete brick element is used to generate other
degenerated volume element shapes.
Because the proposed procedure is based on simple and commonly used ideas, it should be adaptable when using computer programs or procedures
other than FLAC3D to perform numerical analysis
work. The program instructions can be rewritten in
other programming languages.
09069-03.qxd 08/11/2003 20:14 PM Page 17
FLAC and Numerical Modeling in Geomechanics, Brummer et al. (eds)
© 2003 Swets & Zeitlinger, Lisse, ISBN 90 5809 581 9
A new constitutive model based on the Hoek-Brown criterion
P. Cundall, C. Carranza-Torres & R. Hart
Itasca Consulting Group, Inc., Minneapolis, MN, USA
ABSTRACT: A new constitutive model is proposed based on the Hoek-Brown failure criterion. This model
incorporates a plasticity flow rule that varies as a function of the confining stress level. For a low confining
stress, at which a large rate of volumetric expansion at yield is anticipated, an associated flow rule is applied.
For high confining stress, at which the material no longer dilates at failure, a constant-volume flow rule is prescribed. A composite flow rule, which provides a linear variation from associated to constant-volume limits, is
used between the low and high confining stress states. Using an appropriate softening relation, the model can
also represent the transition between brittle and ductile rock behavior. The new model is programmed in
C
and compiled as a DLL file (dynamic link library) that can be loaded directly into either FLAC or
FLAC3D. This paper describes the model and its implementation as a DLL. Physical justification is provided for
the formulation and, specifically, the representation of the volumetric behavior during yield, which depends on
confining stress. A verification example is provided.
failure of the material. However, numerical simulations of elasto-plastic problems allow continuing the
solution after failure has taken place, and the failure
condition itself may change as the simulation progresses (by either hardening or softening). In this event,
it is more reasonable to speak of yielding rather than
failure. There is no implied restriction on the type of
behavior that is modelled – both ductile and brittle
behavior may be represented, depending on the softening relation used.
1 INTRODUCTION
The Hoek-Brown failure criterion is an empirical relation that characterizes the stress conditions that lead
to failure in intact rock and rock masses. It has been
used very successfully in design approaches that use
limit equilibrium solutions, but there has been little
direct use in numerical solution schemes. Alternatively,
equivalent friction and cohesion values have been
used with a Mohr-Coulomb model that is matched to
the nonlinear Hoek-Brown strength envelope at particular stress levels. Numerical solution methods require
full constitutive models, which relate stress to strain in a
general way; in addition to a failure (or yield) criterion,
a flow rule is also necessary, in order to provide a relation between the components of strain rate at failure.
There have been several attempts to develop a full
constitutive model from the Hoek-Brown criterion: e.g.
Pan & Hudson (1988), Carter et al. (1993) and Shah
(1992). These formulations assume that the flow rule
has some fixed relation to the failure criterion, and that
the flow rule is isotropic, whereas the Hoek-Brown criterion is not. In the formulation described here, there is
no fixed form for the flow rule; it is assumed to depend
on the stress level, and possibly on some measure of
damage.
In what follows, the failure criterion is taken as a
yield surface, using the terminology of plasticity theory.
Usually, a failure criterion is assumed to be a fixed,
limiting stress condition that corresponds to ultimate
2 GENERAL FORMULATION
The generalized Hoek-Brown criterion (Hoek & Brown
1998), adopting the convention of positive compressive
stress, is
(1)
where 1 and 3 are the major and minor effective
principal stresses, and ci, mb, s and a are material constants that can be related to the Geological Strength
Index (GSI) and rock damage (Hoek et al. 2002). For
interest, the unconfined compressive strength is given
by c ci sa and the tensile strength by t ci s/mb. Equation (1) and the stresses c and t are
represented in Figure 1.
17
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-03.qxd 08/11/2003 20:14 PM Page 18
(2)
where E1 K 4G/3 and E2 K 2G/3 and (e1,
e2, e3) is the set of principal strain increments. If
the yield criterion (equation 1) is violated by this set
of stresses, then the strain increments (prescribed as
independent inputs to the model) are assumed to be
composed of elastic and plastic parts, i.e.,
(3)
Note that plastic flow does not occur in the intermediate principal stress direction. The final stresses
(1f , 2f , 3f ) output from the model, are related to the
elastic components of the strain increments; hence,
(4)
Eliminating the current stresses, using equations
(2) and (4),
(5)
We assume the following flow rule,
(6)
where the factor depends on stress, and is recomputed at each time step. Eliminating ep1 from equation (5)
Figure 1. Graphical representation of the generalized
Hoek-Brown failure criterion (equation 1) in the (a) compressive and (b) tensile region of the principal stress space
(1, 3).
(7)
It should be noted that the failure criterion (equation 1) does not depend on the intermediate principal
stress, 2; thus, the failure envelope is not isotropic.
Assume that the current principal stresses are (1,
2, 3) and that initial trial stresses (1t , 2t , 3t ) are
calculated by using incremental elasticity, i.e.,
At yield, equation (1) is satisfied by the final
stresses; that is,
(8)
18
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-03.qxd 08/11/2003 20:14 PM Page 19
By substituting values of 1f and f2 from equation
(7), equation (8) can be solved iteratively for ep3,
which is then substituted in equation (7) to give the final
stresses. The method of solution is described later, but
first the evaluation of is discussed.
3.2
Constant-volume flow rule
As the confining stress is increased, a point is reached
at which the material no longer dilates during yield.
A constant-volume flow rule is therefore appropriate
when the confining stress is above some userprescribed level, 3 cv3. This flow rule is given by
(11)
3 FLOW RULES
We need to consider an appropriate flow rule, which
describes the volumetric behavior of the material during yield. In general, the flow parameter will depend
on stress, and possibly history. It is not meaningful to
speak of a dilation angle for a material when its confining stress is low or tensile, because the mode of failure
is typically by axial splitting, not shearing. Although
the volumetric strain depends in a complicated way on
stress level, we consider certain specific cases for which
behavior is well known, and determine the behavior for
intermediate conditions by interpolation.
Three cases are considered below.
3.1
The constant-volume flow rule defined by equation
(11) is represented graphically by point C in Figure 1a.
The normal to the vector ep at point C has a slope equal
to unity, and therefore the rate of volumetric expansion
in the plastic regime is null.
3.3
Radial flow rule
Under the condition of uniaxial tension, we might
expect that the material would yield in the direction
of the tensile traction. If the tension is isotropically applied, we imagine (since the test is practically impossible to perform) that the material would
deform isotropically. Both of these conditions are
fulfilled by the radial flow rule, which is assumed
to apply when all principal stresses are tensile. For a
flow-rate vector to be coaxial with the principal stress
vector, we obtain
Associated flow rule
It is known that many rocks under unconfined compression exhibit large rates of volumetric expansion
at yield, associated with axial splitting and wedging
effects. The associated flow rule provides the largest
volumetric strain rate that may be justified theoretically.
This flow rule is expected to apply in the vicinity of
the uniaxial stress condition (3 ≈ 0). An associated
flow rule is one in which the vector of plastic strain
rate is normal to the yield surface (when both are
plotted on similar axes). Thus,
(12)
The radial flow rule defined by equation (12) is
represented graphically by points D1, D2 and D3 in
Figure 1b. The directions of vectors ep at these points
intercept all the origin of the diagram.
(9)
3.4
Composite flow rule
We propose to assign the flow rule (and thus, a value
for ) according to the stress condition. In the fully tensile region, the radial flow rule, rf, will be used. For
compressive 1 and tensile or zero 3 the associated
flow rule, af, is applied. For the interval 0 3 cv
3,
the value of is linearly interpolated between the associated and constant-volume limits, i.e.,
where the subscripts denote the components in the
principal stress directions, and F is defined by equation (8). Differentiating this expression, and using
equation (6),
(10)
(13)
The associated flow rule used in the constitutive
model is graphically represented in Figure 1a.
The normal to the plastic strain-rate vector ep at point
A is tangent to the yield envelope (equation 1) at
3 0. The slope of the normal to ep, denoted as
k0 in the figure, is inversely related to the coefficient
af defined by equation (10) – i.e., k0 1/af at
3 0.
Finally, when 3 3cv, the constant-volume value,
cv, is used. It is noted that if cv
3 is set equal to
zero, then the model uses a non-associated flow rule
with a zero dilation angle, for 3 0. If 3cv is set
to a very high value relative to ci, the model uses an
associated-flow rule for 3 0.
19
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-03.qxd 08/11/2003 20:14 PM Page 20
high confining stresses, the iteration converges in one
step, but at low confining stresses, up to ten steps are
necessary (the limit built into the code is presently 15).
The composite flow rule defined by equation (13)
in the case of compressive stresses is represented
graphically by point B in Figure 1a. The slope of the
normal to ep at point C is the linear interpolation of the
slopes at points A and B.
5 MATERIAL SOFTENING
In the Hoek-Brown model, the material properties,
ci, mb, s and a, are assumed to remain constant, by
default. Material softening, after the onset of plastic
yield, can be simulated by specifying that these
mechanical properties change (i.e., reduce the overall
material strength) according a softening parameter.
The softening parameter selected for the Hoek-Brown
p
model is the plastic confining strain component, e3.
p
The choice of e3 is based on physical grounds. For
yield near the unconfined state, the damage in brittle
rock is mainly by splitting (not by shearing) with crack
normals oriented in the 3 direction. The parameter ep3
is expected to correlate with the microcrack damage
in the 3 direction.
The value of ep3 is calculated by summing the strain
increment values for ep3 calculated by equation (16).
Softening behavior is provided by specifying tables
that relate each of the properties, ci, mb, s and a, to ep3.
Each table contains pairs of values: one for the ep3
value and one for the corresponding property value. It
is assumed that the property varies linearly between
two consecutive parameter entries in the table.
A multiplier, (denoted as mult in FLAC and
FLAC3D), can also be specified to relate the softening
behavior to the confining stress, 3. The relation
between and 3 is also given in the form of a table.
To illustrate the definition of softening parameters
in the constitutive model proposed in this paper, we
analyze the idealized response of a cylindrical sample
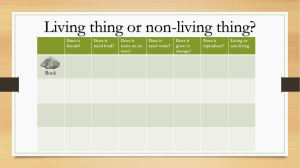
of homogeneous-isotropic material in a typical triaxial experiment – as represented in Figure 2a.
For example, Figure 2b shows a piecewise-linear
stress–strain relationship expressed in terms of the
deviator 1 3 and the shear strain e1 e3.
The different curves in the diagram correspond to
increasing values of confinement 3 in the triaxial
experiment of Figure 2a.
Two cases of practical interest will be considered
here. The first case assumes that the slope of the softening branch is maintained for increasing values of
confinement 3. In Figure 2b the case is represented
by continuous curves (e.g., the line OPR). The second
case assumes that the slope of the softening branch
decreases (in absolute value) as confinement increases,
and that the material behaves in a ductile manner (i.e.,
the slope of the softening branch becomes zero) for a
confinement level 3 dc
3. In Figure 2b this case is
represented by the dashed curves (e.g., the line OPR ).
To illustrate the definition of input parameters in
the constitutive model we need to consider in some
4 IMPLEMENTATION
The equations presented above are implemented in a
DLL (dynamic link library) written in C
, with
the model name hoekbrown. One difficulty with the
failure criterion (equation 8) is that real values for F
do not exist if 3
sci/mb. During an iteration
process, this condition is likely to be encountered, so
it is necessary that the expression for F, and its first
derivatives, be continuous everywhere in stress space.
This is fulfilled by adapting the following composite
expressions:
•
if 3 sci /mb then
(14)
•
if 3
sci /mb then
(15)
To initialize the iteration, a starting value for, ep3
is taken as the absolute maximum of all the strain
increment components. This value, denoted as 1, is
inserted into equation (7), together with the value for
found from the flow-rule equations, and the resulting stress values inserted into equations (14) and (15).
The resulting value of F is denoted by F1. Taking the
original value of F as F0 (and the corresponding plastic strain increment of zero as 0), we can estimate
a new value of the plastic strain increment, using a
variant of Newton’s method,
(16)
From this, we find a new value of F (that we call F2),
and if it is sufficiently close to zero, the iteration stops.
Otherwise, we set F0 F1, F1 F2, 0 1 and
1 2, and apply equation (16) again.
Tests show that the iteration scheme converges for all
stress paths tried so far, including cases in which s 0
(material with zero unconfined compressive strength),
which led to problems in previous implementations. For
20
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-03.qxd 08/11/2003 20:14 PM Page 21
(17)
(18)
The residual parameters Rci and mRb in equation (18)
are decreased in the same proportion, multiplying the
initial (peak) parameters by the factor (1 ), i.e.,
(19)
(20)
The parameter in the equations above, that lie in the
range 0 1, controls the jump of strength from
the peak to residual stages. If 0, then the peak
and residual strength are the same and the material
behaves in a ductile manner (see Figure 2b). If 1
then the material behaves in a brittle manner, with the
minimum possible value for the residual strength
(i.e., 1 3 in equation 18).
In the simplest case we can consider that the loss of
strength in the softening branch in Figure 2b is linearly related to the plastic shear-strain p as follows,
(21)
Note that in the equation above, crp is the critical value
of plastic shear-strain for which the residual stage is
reached (see point R in Figure 2b).
The loss of strength can also be expressed in terms
of the drop modulus 2G. indicated in Figure 2b (the
definition of drop modulus used here is as in Linkov,
1992). This parameter controls the ductile/brittle
behavior of the material. For example, when 0 the
material behaves in a perfectly-plastic manner and
when → the material behaves in a perfectlybrittle manner. The relationship between cr
p and is,
Figure 2. (a) Idealized triaxial experiment of a cylindrical
sample of isotropic-homogeneous Hoek-Brown material.
The diagrams (b) and (c) represent an idealized piecewise
linear response obtained from the triaxial experiment.
(22)
In the constitutive model discussed in this paper, the
plastic strain ep3 (rather than the plastic shear-strain
p) is taken as a softening parameter. The relationship
between ep3 and p can be constructed from the
analytical-solution of the triaxial experiment of
Figure 2a. This relationship, that is represented in
detail the relationships that govern the response of the
material represented in Figure 2.
We assume that the peak and residual strength of
the material are given by the following equations,
21
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-03.qxd 08/11/2003 20:14 PM Page 22
From equation (23), again considering 3 0, the
critical value of plastic strain is,
Figure 2c, depends on the flow rule assumed for the
material as follows,
ep3 cr (0) In the FLAC model, the tables for the softening
parameters should be defined as follows:
(23)
In the equation above the parameter K is related to
the instantaneous dilation angle as
(24)
For interest, we list here the expressions for the
slopes corresponding to the elastic, softening and residual branches in the e3 vs. e1 – e3 diagram of Figure 2c,
e3p
ci [MPa]
mb
s
a
0.000
0.013
0.10
0.05
0.05
5.0
2.5
2.5
1.0
1.0
1.0
0.5
0.5
0.5
In addition to the table above, a table defining the
relationship between the multiplier and the confining stress 3 will be normally defined. The type of
relationship to consider depends on how the drop modulus of the softening branch is assumed to vary with
the level of confinement.
To illustrate the definition of the multiplier we
consider first the case in which the drop modulus of
the softening branch, 2G, is maintained for increasing
values of confinement 3 (see line OPR in Figure 2b).
For this case, the multiplier is defined as follows,
(25)
(26)
(27)
(28)
We consider now a practical case of definition of
softening parameters in a FLAC model.
Let us assume the following values for the parameters that control the response of the material in
Figure 2:
Assuming an upper limit for the confining stress
equal to 10 ci, and taking 5 points to represent this
relationship, the definition of the multiplier in
FLAC will be as follows:
ci 0.1 MPa
mb 5
s 1
a 0.5
0.5
0.2 (for 3 0)
E 100 ci
0.3
0o
[Note that the condition 0o implies that the
material does not dilate in the plastic regime; in the
FLAC model this condition is satisfied by specifying
cv3 0.]
For the value of defined above, the residual
parameters Rci and mRb are computed with equations
(19) and (20) and result to be,
3 [MPa]
0.00
0.25
0.50
0.75
1.00
1.0000
3.6742
5.0990
6.2048
7.1414
Note that in the table above, the second column is
computed using equation (28).
As a second example of the definition of the multiplier we consider now the case for which the drop
modulus of the softening branch, 2G, decreases (in
absolute value) for increasing values of confinement
3 (see line OPR in Figure 2b). To achieve the ductile
behavior ( 0) at the confinement level 3 dc
3,
we can use the following relationship between the
multiplier and the confining stress 3,
Rci 0.05 MPa
mRb 2.5
From equation (23), and considering 3 0 the critical
value of plastic shear-strain for which the residual
stage is achieved is,
(29)
cr
p (0) 0.039
22
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
0.013
09069-03.qxd 08/11/2003 20:14 PM Page 23
(30)
Assuming then a value of dc
3 ci, and an upper
limit for the confining stress equal to 10 ci, the definition of the multiplier in FLAC will be as follows:
3 [MPa]
0.000
0.033
0.067
0.100
1.000
1.0
1.5
3.0
Note that in the table above, the second column is
computed using equations (29) and (30).
6 VERIFICATION
Stresses and displacements are calculated for the case
of a cylindrical tunnel in an infinite brittle Hoek-Brown
medium subjected to an in-situ stress field. A uniform
compressive stress of 0 15 MPa is assigned as the
far-field stress, and an internal pressure pi 2.5 MPa
is applied inside the tunnel (see Figure 3a).
The problem is based on an example posed by
Hoek & Brown (1980). The closed-form solution in
that example only provided the stress distribution calculation, and is extended here to include the displacement solutions for both associated and non-associated
plastic flow. (A description of the equations that summarize the solution is provided in the Appendix A.)
The properties and conditions selected for this test
are also listed in Figure 3a. Both initial rock and broken rock properties for the Hoek-Brown model are
specified.
The brittle behavior of the rock is simulated by
instantaneous softening – i.e. the Hoek-Brown properties are changed from initial values at e p3 0 to broken values at a small value of e p3 0 (an arbitrarily
small value for e p3 equal to 10 20 is assumed).
The comparison of the results from the FLAC
model using model hoekbrown to the analytical solution (given in the Appendix A) is shown in Figure 3b
for the calculation of hoop stress and radial stress
around the tunnel, and in Figure 3c for the calculation
of radial displacements for both the associated and
non-associated flow cases. In all cases, the agreement
between FLAC and analytical results is characterized
by an error of less than 1%.
Figure 3. Elasto-plastic solution for excavation of a cylindrical tunnel in a brittle generalized Hoek-Brown material.
FLAC3D. The flow rule is based on general knowledge
of the volumetric behavior of rock, which usually
exhibits large dilation at low confining stresses and
small or zero dilation at large confining stresses, as
the failure condition is approached. Although this
assumption conforms to practical experience, it will be
7 CONCLUDING REMARKS
A full constitutive model based on the Hoek-Brown
criterion has been implemented for use in FLAC and
23
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-03.qxd 08/11/2003 20:15 PM Page 24
necessary to compare the response of the new model
with actual measurements of rock behavior, both in the
laboratory and in the field, and calibrate the parameter
cv
3 from observations of volumetric strain. Further, the
softening behavior is assumed to depend on the confining stress, not on deviatoric stress, which is the more
usual assumption. This decision was made on a general knowledge of rock behavior, but it will need to be
verified (or falsified) by comparing model predictions
with measurements of rock response under post-peak
conditions.
A.1 Plastic region, r Rpl
The critical internal pressure below which the failure
zone develops is computed from the following transcendental equation,
(A.1)
The extent Rpl of the failure zone is,
REFERENCES
Carranza-Torres, C. & Fairhurst, C. 1999. The elasto-plastic
response of underground excavations in rock masses that
satisfy the Hoek-Brown failure criterion. International
Journal of Rock Mechanics and Mining Sciences 36(6),
777–809.
Carter, T., Carvalho, J. & Swan, G. 1993. Towards the practical application of ground reaction curves. In W.F.
Bawden & J.F. Archibald (Eds), Innovative mine design
for the 21st century, pp. 151–171. Rotterdam: Balkema.
Hoek, E. & Brown, E.T. 1980. Underground Excavations in
Rock. London: The Institute of Mining and Metallurgy.
Hoek, E. & Brown, E.T. 1997. Practical estimates of rock
mass strength. International Journal of Rock Mechanics
and Mining Sciences 34(8), 1165–1186.
Hoek, E., Carranza-Torres, C. & Corkum, B. 2002. HoekBrown failure criterion – 2002 edition. In H.R.W. Bawden,
J. Curran & M. Telesnicki (Eds), Proceedings of the 5th
North American Rock Mechanics Symposium and the 17th
Tunnelling Association of Canada Conference: NARMSTAC 2002. Mining Innovation and Technology. Toronto – 10
July 2002, pp. 267–273. University of Toronto.
Linkov, A.M. 1992. Dynamic phenomena in mines and the
problem of stability. MTS System corporation. 14000
Technology Drive, Eden Praire, MN 55344, USA. Notes
from a course of lectures presented as MTS visiting professor of Geomechanics at the University of Minnesota,
Minneapolis, MN, USA.
Pan, X.D. & Hudson, J.A. 1988.A simplified three dimensional Hoek-Brown yield condition. In M. Romana (Ed.),
Rock Mechanics and Power Plants. Proc. ISRM Symp.,
pp. 95–103. Balkema. Rotterdam.
Shah, S. 1992. A study of the behaviour of jointed rock masses.
Ph. D. thesis, Dept. Civil Engineering, University of
Toronto.
(A.2)
The solution for the radial stress field is
(A.3)
The solution for the hoop stress field is
(A.4)
For the case of non-associated flow rule (with dilation angle equal to zero) the solution for the radial
stress field is computed from integration of the following second-order differential equation,
APPENDIX A. CLOSED-FORM SOLUTION
FOR A CYLINDRICAL HOLE IN AN INFINITE
BRITTLE HOEK-BROWN MEDIUM
(A.5)
The solution presented in thisAppendix is based on a
scaled solution for cylindrical tunnels in Hoek-Brown
media discussed in Carranza-Torres and Fairhurst
(1999). Analytical expressions to compute the field
quantities r, and ur are presented here for the
plastic and elastic regions around the tunnel.
where
(A.6)
24
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
is defined as,
09069-03.qxd 08/11/2003 20:15 PM Page 25
the following non-linear second-order differential
equation,
The functions dr/d and d/d in the differential
equation above are
(A.14)
(A.7)
The only difference with the case of non-associated
flow rule (zero dilation angle) is that the coefficients
A1, A2 and A3 depend now on the solution of the stress
field r as follows,
and
(A.15)
(A.16)
(A.8)
(A.17)
while the coefficients A1, A2 and A3 are
A.2 Elastic region, r Rpl
The solution for the radial stress field is
(A.9)
(A.18)
(A.10)
(A.11)
The solution for the hoop stress field is
The boundary conditions to integrate the differential
equation (A.5) above are
(A.19)
(A.12)
The solution for the radial displacement field is
and
(A.20)
The plastic and elastic solutions for the field quantities r and ur presented above are continuous at the
elasto-plastic boundary (i.e., at r Rpl). The solution
for the field quantity is discontinuous when there is
a jump of strength from peak values (ci, mb, s and a) to
residual values (Rci, mbR, sR and aR) – see Figure 3b.
(A.13)
In the case of associated flow rule, the solution for
the radial stress field is obtained from integration of
25
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-04.qxd 08/11/2003 20:16 PM Page 27
FLAC and Numerical Modeling in Geomechanics, Brummer et al. (eds)
© 2003 Swets & Zeitlinger, Lisse, ISBN 90 5809 581 9
A study of compaction band formation with the Double-Yield model
C. Detournay & P. Cundall
Itasca Consulting Group, Inc., Minneapolis, MN, USA
J. Parra
PDVSA – Intevep, S.A., Los Teques, Venezuela
ABSTRACT: The occurrence of thin localized bands associated with concentration of compressive strain has
recently been reported in very porous rocks, both in field and laboratory settings. These structures exhibit a
reduction of porosity, and are of importance to the petroleum industry because they can impact reservoir permeability. Compaction bands have been the object of both theoretical and experimental studies by Olsson (1999),
Issen & Rudnicki (2000), Bésuelle (2001) and others. In this paper, we examine, in a simple theoretical framework,
the basic conditions for a band to appear. We consider the case of the Double-Yield model, identify conditions for
localization related to the volumetric cap, and give examples of numerical simulations that illustrate band formation.
with the presence of a cap in the yield surface. We
consider the case of a strain softening/hardening cap,
normal to the mean pressure axis in effective stress
space, and examine the conditions on the cap for
compaction bands to appear.
For numerical investigation with FLAC, we use the
Double-Yield constitutive model. This model is characterized by a strain softening Mohr Coulomb behavior
for shear yielding, and by an independent strain hardening cap behavior for volumetric yielding.
The theoretical conditions for compaction band
formation associated with stress states on the volumetric cap of the Double-Yield model are derived in
section 2. The results of numerical experiments are
presented in section 3. Conclusions for the work are
given in section 4.
1 INTRODUCTION
Mollema & Antonellini (1996) recently identified the
presence of thin compacted bands in porous sandstone,
and made reference to these features as “compaction
bands”. Although these structures are sometimes associated with the presence of shear bands, they have
individual characteristics, which are outlined in these
definitions, found in the literature:
– Compaction bands are narrow planar zones of
localized compressive deformation perpendicular
to the maximum compressive stress (Issen &
Rudnicki 2000).
– A compaction band is a tabular zone that exhibits
normal closure but no shear offset (Olsson 1999).
– Pure compaction bands are bands that exhibit a
normal compacting strain and a zero shear strain
(Bésuelle 2001).
2 EXISTENCE CRITERIA FOR
COMPACTION BAND
Compaction bands have attracted attention because
of the potential impact that the reduced porosity of
these features may have on oil reservoir exploitation.
The authors cited above are among those who have
investigated the condition for their formation in theoretical, laboratory and field settings.
In this paper, we work in a basic theoretical framework. The change of porosity localized in the band is
interpreted as an inelastic volume deformation, which
can occur as an alternative to the homogeneous mode.
Irrecoverable volumetric deformations are associated
As a convention in this paper, tension and extension
are positive for stress and strain, respectively, compression is positive for pressure, and effective stresses are
denoted without a dash. Stresses are denoted as ij,
and strains as ij with i 1, 2, 3 and j 1, 2, 3.
Volumetric strain, ev, is defined by ev 11
22 33, and mean pressure, by p (11
22 33)/3. Rates are denoted by a superscript dot.
First, we derive the stress-rate/strain-rate relations
27
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-04.qxd 08/11/2003 20:16 PM Page 28
where
for evolution of a stress point on the Double-Yield
volumetric cap, and then, we express the condition for
volumetric localization.
(5)
2.1
Cap constitutive relations
and Kc, Gc are current values of tangent bulk and
shear modulus.
The cap pressure is a function of plastic volumetric
strain, evp, and the hardening rule is:
In the Double-Yield model, the volumetric yield
function is:
(1)
(6)
where pc is the cap pressure, and F v 0 for elastic
conditions.
The cap F v 0 is represented by a straight line in
the plane of shear stress, q, versus mean pressure, p,
shown in Figure 1.
The flow rule for volumetric yielding is associated;
thus, the potential function is:
The coefficient a is the hardening modulus (positive
for softening) which is a function of total plastic volumetric strain. An example of volumetric hardening
behavior is represented in Figure 2.
The flow rule gives the direction of plastic strain rate,
which is parallel to the gradient of Gv in stress space:
(2)
.
The plastic multiplier , gives the magnitude of plastic strain rate. It may be found from the consistency
condition:
(7)
The total strain rates are partitioned into elastic and
plastic parts:
(8)
(3)
Substitution of the expression 2 for plastic potential
in Equation 7 gives, after differentiation:
The stress-strain relations are, in rate form:
(9)
(4)
Using Equation 9 for the plastic strain rate, the
hardening rule in Equation 6 takes the form:
(10)
Figure 1. Volumetric cap for the Double-Yield model.
Figure 2. Example of volumetric hardening rule.
28
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-04.qxd 08/11/2003 20:16 PM Page 29
met within the material sample. First, equilibrium at
the interface of the band only allows a stress discontinuity for the direct stress parallel to the band. Second,
the direct strain parallel to the band must remain continuous.
We analyze the situation at the onset of band formation, and denote as ni the unit normal to the potential
planar band in which localized deformation occurs.
Mathematically, the condition for non-uniqueness
translates as (see e.g. Issen & Rudnicki 2000):
After substitution of this expression in the consistency condition, we obtain:
(11)
The plastic strain increments in Equation 9 may
now be expressed as:
(12)
(17)
From Equation 3, elastic strain rate may be
expressed as total rate minus plastic rate:
where the components of the stiffness matrix may be
found in Equation 14.
We look at the case when the out of plane component
of the normal to the band is zero, or n3 0. Band formation is predicted to occur when the condition
(13)
Finally, after substitution of Equation 13 in
Equation 4, using Equation 12 and some manipulations,
the cap constitutive behavior may be written in the form:
(18)
is first met in a program of deformation. By using the
relations
(14)
for unit length of the vector ni, and 2 1 2Gc in
Equation 5, the condition may be expressed as:
where
(19)
(15)
A symbolic way to write this expression is:
(16)
where Lijkl is the stiffness matrix, and Einstein summation convention on repeated indices is used.
2.2
Condition for localization
We consider the deformation of a homogeneous sample
of material under gradual application of prescribed uniform stresses, as shown in Figure 3. We will assume that
the major compressive stress, 1 is vertical. Prior to
the occurrence of a band, the sample deforms uniformly. After appearance of the band, stress and strain
rates will be uniform inside and outside the band, but
they will be different from each other. A bifurcation
from homogeneous deformation has occurred. The
non-homogeneous solution can only exist provided that
some continuity requirements on stress and strain are
Figure 3. Material sample, prescribed stresses, and potential
compaction band.
29
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-04.qxd 08/11/2003 20:16 PM Page 30
Figure 5. Plateau corresponding to pore collapse in a
schematic porous material stress–strain curve.
Figure 4. Example of cap softening behavior.
The possible band orientations, given by the roots
of a quadratic equation, are given by:
for the occurrence of compaction band. A relation
between hardening modulus and stiffness properties
must also be satisfied for the bands to appear: according
to Equation 25, the hardening modulus, (which is positive for softening of the cap) must be equal or larger
than 4Kc/(4 3Kc/Gc).
In a uniaxial compression test (oedometric test),
.
.
with 11 33 . 0, the constitutive relation,
.
Equation 14, yields 22 (1 b) 22, so the localization
condition, Equation 24, which may also simply be
derived using the compliance approach of Vermeer
(1982), corresponds to the first occurrence of a plateau
in the plot of vertical stress versus strain, see Figure 5.
It is interesting to note that, according to Equation 19,
the condition for band formation in the direction parallel to the maximum compressive stress is also given
by Equation 24. So the same condition predicts band
formation in two perpendicular directions.
(20)
where
(21)
For a real solution, we must have:
(22)
Using the definition of b, c, and 1 given above,
the condition takes the form:
(23)
3 NUMERICAL EXPERIMENTS
This condition can only be satisfied if a 0, that
is when softening of the cap occurs, see Figure 4.
Physically, cap softening can correspond to grain collapse or breakage of cemented grains.
By definition, a pure compaction band is oriented
perpendicular to the maximum compressive stress.
According to our convention, we must have: n1 0,
in which case Equation 19 implies:
Our theoretical derivation shows that cap softening
is a necessary but not a sufficient condition for the
formation of compaction bands. A relation between
hardening modulus (a) and stiffness properties (Kc,
Gc) must also be satisfied for the bands to appear. In an
oedometric test, two sets of bands (one horizontal, and
one vertical) are predicted to occur for
(24)
(26)
Finally, using Equation 5 for 1, and Equation 15
for b, the localization condition may be expressed as:
Numerical experiments are carried out to validate
this prediction, and illustrate band formation.
Numerical simulations of an oedometric test are performed using the finite difference code FLAC. The configuration is axi-symmetric. The grid contains a total of
400 elements. The boundary conditions correspond to
(25)
From the above consideration it follows that softening of the cap is a necessary but not sufficient condition
30
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-04.qxd 08/11/2003 20:16 PM Page 31
Figure 7. Seed 1 – Contours of 11 at 7000 steps.
roller boundaries at the bottom and lateral side of the
model. A Double-Yield constitutive model is assigned
to the zones in the grid. Friction is zero, and cohesion
is assigned a large value (compared to maximum mean
stress in the simulation). We consider the state of the
model at the onset of band formation. The initial
stress field is isotropic, and the material is normally
consolidated. Several cases are considered, corresponding to hypothetical values of current hardening
modulus. The test is strain-controlled: a compressive
velocity is applied at the top of the model.
The stiffness properties for the simulation are chosen such that Kc/Gc 2, and Equation 26 translates to
a 0.4 Kc. To trigger the localization process, the
material bulk modulus is given a random deviation of
1%. The simulations are performed using the data file
cb.dat, listed in the Appendix. In cases when the initial hardening modulus is equal to 0.2Kc or 0.3Kc,
(softening of the cap occurs, but the criteria for band
formation is not met), no band is observed. In the case
when a 0.405Kc (a value slightly larger than the
threshold for band formation), two sets of bands
develop in the model: one normal, and one parallel to
the major compressive stress. Simulation results at
three different stages, and for two different random
seeds (used for assignment of a small deviation
around an average value for the bulk property) are
presented below.
Figure 6 show the results obtained for seed 1: a first
horizontal band appears, then a second one starts to
grow, and a third one develops. At each step, the additional deformation is seen to localize in the new band.
The behavior of the normal stress parallel to the bands,
at the end of the simulation is shown in Figure 7.
When the simulation was repeated, this time with
another seed, the results in Figure 8 were obtained. The
first band to appear is vertical and it grows across the
Figure 6. Seed 1 – Contours of volumetric strain increments and displacement vectors at: a) 4000, b) 5000 and
c) 7000 steps.
31
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-04.qxd 08/11/2003 20:16 PM Page 32
Figure 9. Seed 2 – Contours of 22 at 7000 steps.
grid before a second horizontal compaction band
appears. Contours of vertical stress at the end of the
simulation are shown in Figure 9. Apparently it is random whether horizontal or vertical bands appear first.
4 CONCLUSIONS
A simple theoretical framework has been adopted to
derive the basic conditions for compaction band formation. The Double-Yield constitutive model in FLAC was
considered, and conditions for localization related to
the volumetric cap were identified using the approach
of Issen & Rudnicki (2000). It was found that softening of the cap, which can correspond to grain collapse
or breakage of cemented grains, was a necessary condition for the occurrence of compaction band. But the
condition is not sufficient; in addition, the hardening
modulus (positive for softening of the cap) must exceed
a critical value, which is a function of material bulk
and shear moduli. The critical value, which may also
be derived using the compliance approach of Vermeer
(1982), corresponds to the first occurrence of a plateau
in a plot of major compressive stress versus strain.
The analysis predicts the occurrence of two sets of
bands, normal and parallel to the direction of major
compressive stress. Examples of numerical simulations
are given that illustrate band formation.
ACKNOWLEDGEMENTS
The work related in this paper was performed as part of
a research project carried out for INTEVEP. Chad
Sylvain is thanked for editing of the figures and Michele
Nelson for her help in formatting the manuscript.
Figure 8. Seed 2 – Contours of volumetric strain increments and displacement vectors at: a) 4000, b) 5000 and
c) 7000 steps.
32
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-04.qxd 08/11/2003 20:16 PM Page 33
REFERENCES
prop bul 1110e6 rdev 1110e4 ; --- 1% deviation
; case 1 a0.2K
;table 1 0 5e6 1e-3 47.78e5 1e-2 2.78e6 1 0.5e5 ; no cb
;ini yvel 0 var 0 -1e-6
; case 2 a0.3K
;table 1 0 5e6 1e-3 46.67e5 1e-2 1.70e6 1 0.5e5 ; no cb
;ini yvel 0 var 0 -1e-6
; case 3 a0.405K
table 1 0 5e6 1e-3 45.5e5 1e-2 0.5e6 1 0.5e5 ; cb
ini yvel 0 var 0 -1e-7
; case 4 a0.5K
;table 1 0 5e6 1e-3 44.45e5 0.8e-2 0.56e6 1 0.5e5 ; cb
;ini yvel 0 var 0 -1e-7
Bésuelle, P. 2001. Compacting and dilating shear bands in
porous rock: Theoretical and experimental conditions.
Journal of geophysical Research, 106(B7): 13,435–13,442.
Issen, K.A. & Rudnicki, J.W. 2000. Conditions for compaction
bands in porous rock. Journal of Geophysical Research
105(B9): 21,529–21,536.
Itasca Consulting Group, Inc. 2000. FLAC Ver. 4.0 User’s
Guide. Minneapolis: Itasca.
Mollema, P.N. & Antonellini, M.A. 1996. Compaction bands:
A structural analog for anti-mode I cracks in Aeolian
sandstone. Tectonophysics 267: 209–228.
Olsson, W.A. Theoretical and experimental investigation of
compaction bands in porous rock. Journal of Geophysical
Research 104(B4): 7219–7228.
Vermeer, P.A. 1982. A simple shear-band analysis using compliances. IUTAM Conference on Deformation and Failure
of Granular Materials, Delft. 31Aug–3 Sept, 1982.
fix x i21
fix y j1
fix y j21
ini sxx -5e6 syy -5e6 szz -5e6
step 4000
APPENDIX A: DATA FILE
save cb1.sav
plot hold vsi fill
step 1000
save cb2.sav
plot hold vsi fill
new
title
Oedometric test with DY model
config axi
g 20 20
gen 0 0 0 1 1 1 1 0
mo dy
pro bu 1110e6 sh 555e6 cap_pressure 5e6 cptable 1
mul 10
pro den 1000 coh 1e10 ten 1e10
step 2000
save cb3.sav
plot hold cap_pressure fill
plot hold vsi fill
plot hold sxx fill
ret
33
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-05.qxd 08/11/2003 20:16 PM Page 35
FLAC and Numerical Modeling in Geomechanics, Brummer et al. (eds)
© 2003 Swets & Zeitlinger, Lisse, ISBN 90 5809 581 9
A new viscoplastic model for rocks: application to the Mine-by-test of
AECL-URL
F. Laigle
Electricité de France, Hydro Engineering Centre, France
ABSTRACT: A new viscoplastic constitutive model has been developed by EDF-CIH. Its aim is able to take
into account delayed behavior of rock materials in the framework of nuclear waste repository studies. In this
case, it’s important to predict the rock damage evolution in time in the neighboring storage tunnels. The main
assumptions of the constitutive model are presented in this paper. One application to the Mine-by-Test done by
the AECL in the Lac de Bonnet granite is shown. The low field strength of the granite in comparison with
laboratory measurements may be justified by the delayed behavior of this granite. Failure with v-shape notches
is well shown by the simulation. A prediction of the hydraulic permeability increasing around the tunnel versus
time is presented.
The Mine-by test has been done at the level – 420, in
an undamaged granite mass (Lac de Bonnet Granite).
This experiment consists of digging a gallery in wellknown conditions in a previously monitored part of
the rock mass. The major aim is to observe the behavior of the granite during the excavation phase and at
long-term.
The direction of the gallery has been defined in
accordance with initial stresses in the ground. At this
depth, the major compressive principal stress is more
or less horizontal, and is about 55 MPa. This stress
is 3.9 times the vertical stress corresponding at the
weight of overburden. The intermediate principal
stress is about 48 MPa.
1 INTRODUCTION
In the framework of studies of underground nuclear
waste storage, it’s important to predict the evolution
in time and at very long term of the ground surrounding the excavations. One objective of these studies
is to assess the evolution of the EDZ (Excavation
Damage Zone) in the time. This EDZ is assumed to
be the zone where rock is fractured and where the
permeability increasing is large.
In this aim, a viscoplastic constitutive model has
been developed by EDF and integrated in FLAC. This
model will be briefly presented in the paper.
The application is about the Mine-by-Test done in
the AECL-URL. The evolution in time of the failure
zone in the roof and invert of the gallery is well simulated. Assumptions of this model allow to assess the
damage zone (fissured rock) and the fractured zone
(continuous fissure) associated with a strong permeability increasing.
2 THE MINE-BY TEST EXPERIMENT
The Underground Research Laboratory (URL) of
the Atomic Energy of Canada Laboratory (AECL) has
been dug in the framework of the Canadian nuclear
waste management program launched in the 70’s. This
underground laboratory is located in the state of
Manitoba. It’s composed of a main shaft of 443 m
depth, reaching two experimental levels excavated at
240 m depth and 420 m depth.
Figure 1. Location and view of the URL.
35
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-05.qxd 08/11/2003 20:16 PM Page 36
Figure 2. Location of v-shaped notches in the Mine-by test
tunnel.
2.1
Figure 3. Stress–strain curve for Lac de Bonnet granite.
Bonnet Granite, it seems that the cracking and
existing damage is not enough to justify a sufficient decrease in the strength.
– A “structural effect” as suggested by Diederich
(2002), taking into account some geometrical and
shape differences between laboratory and field
conditions.
– A softening effect due to the stress path generated
by the digging process. Some 3D simulations
(Eberhardt 2001) show that there is a stress rotation forward the face heading which can induce
additional damage in rock not taken into account in
a 2D approach.
– A progressive damage of the rock structure in time.
Some creep tests and UCS tests have been done by
Schmidtke & Lajtai (1985) showing that this granite
presents an apparent “viscous” behavior. This phenomenon corresponds to a decrease in the strength
in accordance with the loading rate. So, Martin
shows that the UCS can decrease 30% if the loading
rate reduces from 0.75 MPa/s to 0.0075 MPa/s. At
this low loading rate, the measured strength is
about 150 MPa. This does not seem enough to justify the field failure, however, we have to be conscious that field loading rates are much lower than
those applied in laboratory conditions. The previous strength measured at 0.0075 MPa/s is still not
representative of the in situ characteristic.
Observed and monitored behavior
In these conditions, during digging process and after
that, a stress-induced fractured zone has been observed
above the crown and below the floor of the gallery,
corresponding to a brittle failure mechanism generating a classical v-shape notches.
Outside of these highly stressed zones, some Microseismic events could be monitored (Cai et al. 2001)
but no major damage could be observed.
2.2
Laboratory tests
Some usual unconfined compressive tests have been
done by Read et al. (1998) on the Lac du Bonnet
granite. These tests provided following mechanical
characteristics (Fig. 3):
– short term UCS strength: f 213 MPa
– compressive stress corresponding to the volumetric
strain reversal: cd 160 MPa
– compressive stress corresponding to the initiation
of the crack growth: ci 90 MPa.
If we only consider the short term strength, it’s
impossible to justify the appearance of the broken
zone in highly compressive zones, considering initial
state of stresses. Martin shows if we want to find by
simulation the occurring of the failure, it’s necessary
to consider a limit strength threshold around 100 MPa.
So some reasons have to be found to explain this
strong decreasing of the strength in field in comparison with laboratory measurements. These explanations could be:
Some other observed phenomena on site suggest
that there is a significant time behavior of the ground.
As we see on the Figure 2, the roof spalling failure
appeared progressively during several months. Similarly, some acoustic emissions have been registered
several years after the digging of this gallery. Time
behavior seems to be the major phenomenon, which
can explain and justify the reduction of laboratory
– The well-known “scale effect”. A decrease in
strength is generally observed with increasing
elementary size of rock. In the case of the Lac de
36
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-05.qxd 08/11/2003 20:16 PM Page 37
strength from 213 MPa to a field strength less than
100 MPa.
2.3
Definition of the in situ strength
The elastoplastic strain component ensues from the
following non-associated rule function:
In the case of an undamaged rock like the Lac de
Bonnet Granite, the apparent in situ strength under a
specific confinement state is function of the loading
rate. As this loading rate is much lower than these
applied in laboratory conditions, it seems reasonable
to assume that the in situ strength could be assimilated to the long term strength of the rock. From laboratory tests, this “long term strength” could have
several definitions:
(3)
The hardening of the elastoplastic mechanism is only
negative. Some specific hardening laws were defined
for each of the internal parameters m, s and a, allowing to describe the evolution of the rock sample
strength from maximum peak value to the residual
state. The softening behavior domain reached after
the peak strength, is assumed to be divided in three
phases:
– From Sangha et al. (1972), the long term strength
corresponds to the volumetric strain reversal.
Above this threshold, the crack growth is assumed
to be “unstable”. This notion of “instability” seems
totally subjective because is related to the delay
allowed by experimental testing in laboratory
conditions.
– From Morlier (1966) or Wiid (1970), the long term
strength of rocks is assumed to be correlated to the
beginning of the crack initiation. Assuming that
the time behavior of cohesive materials like rocks
is associated with a crack growth, this definition
appears more physical. It’s in accordance with
experimental results carried out by Schmidtke
which show that the long term strength of the Lac
de Bonnet granite could be estimated to 90 to
100 MPa. This threshold corresponds to the crack
initiation under unconfined conditions.
1. The first phase of softening corresponds to a deterioration of the rock’s cementation illustrated by
a progressive disappearance of the cohesion at the
macroscopic scale. This first phase is associated
with an increasing of the dilatancy.
2. The second phase corresponds to the shear of an
induced fracture. It’ s associated with a decreasing
of the dilatancy at the macroscopic scale.
3. Finally, the last domain corresponds to a purely
frictional behavior, which defines the residual
strength. The shear occurs without any volumetric
strain.
A viscoplastic version of the model has been developed after that. This version is based on the Perzyna’s
theory, which assumes that the viscoplastic strain
rate is a function of the distance between the loading
point representative of the state of stresses and a yield
viscoplastic surface, in accordance with the following
flow rule:
3 CONSTITUTIVE MODEL
3.1
General principles
A new constitutive model has been suggested by
Laigle (2003) aiming at accurate simulation of the
rock behavior in the averaged and large strains
domain. A first version of the model has been initially
developed in the framework of the elastoplastic theory.
In this case, the yield surface corresponds to a generalized form of the Hoek-Brown criterion. Internal
parameters “m”, “a” and “s” change according to an
hardening variable p:
(4)
O(F) is a flow function and F is the overstress function. Their expressions are followings:
(5)
(1)
(2)
(6)
37
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-05.qxd 08/11/2003 20:16 PM Page 38
Figure 7 shows simulations of a triaxial test with
10 MPa of confinement at several strain rates. In
accordance with the increasing of the strain rate, we
may observe both an increasing of the peak strength
and a changing of the behavior. It appears that the
lower the rate, the more the rock behaves like a ductile material.
An important assumption is to assume that the hardening parameter rate p corresponds to the total irreversible strain as follows:
(7)
and the global strain rate is the following:
1000
(8)
Deviatoric stress (MPa)
900
el is the elastic strain rate.
ep is the elastoplastic strain component.
vp is the viscoplastic strain component.
3.2
Identification of parameters
800
Initial elastoplastic loading surface
700
600
500
Residual strength criterion
Strength criterionfor a
-5
Strain rate of 10 /s
400
300
200
Viscoplastic yield surface
100
0
Three main sets of rheological parameters are needed
for the constitutive model:
20
0
40
60
80
100
Minimal principal stress (MPa)
1. Parameters describing the elastic reversible behavior which is assumed to not be time dependent.
2. Parameters affected to the elastoplastic instantaneous mechanism: Four variables c, mpeak, speak
and apeak are needed to describe the initial elastoplastic loading surface. This yield surface characterizes the rock strength for a very large loading
rate. An additional parameter defines the residual
strength criterion. Some few additional parameters
describe the hardening kinetic of the loading
surface from its initial position to the residual state.
Another set of variables describes an intermediate
criterion corresponding to the stress threshold
when the apparent cohesion vanishes.
3. Parameters affected to the viscoplastic time
dependent mechanism: Two parameters are needed
to describe the yield viscoplastic surface. This
yield corresponds to the damage criterion, which is
the initiation of cracking and so of the dilatancy.
Up to now, in this constitutive model, it has been
assumed to be a Tresca surface described by the
parameters c, m0, and s0.
Figure 4. Stress criteria held for the Lac de Bonnet granite.
300
UCS (MPa)
Experimental results
200
150
100
50
0
1,E-12
1,E-10
1,E-08
1,E-06
1,E-04
1,E-02
1,E+00
-1
Strain rate (s )
Figure 5. UCS vs. strain rate – comparison simulation–
experience.
1hour
1day
1month
1year
100
Deviatoric stress level (%)
90
The kinetic of viscous behavior is adjusted by 2
parameters “n” and “A” intervening in the flow rule
(equation 5). These 2 parameters are identified using
2 types of experimental results:
– Evolution of the strength in accordance with the
loading rate (Martin & Read 1992). Comparison of
these experimental results and simulations is
shown in Figure 5.
– Evolution of the creep time to failure versus the
deviatoric creep level (Schmidtke & Lajtai 1985).
The adjustment of the theoretical curve is shown in
Figure 6.
80
70
Experimental results
60
50
Simulation
40
30
20
10
0
1
10
100
1000
10000
100000 1000000 10000000 1E+08
1E+09
Time to failure (s)
Figure 6. Time to failure vs. deviatoric stress level –
comparison simulation–experience.
38
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
Simulation
250
09069-05.qxd 08/11/2003 20:16 PM Page 39
ε =1.5.10-4/s
250
Deviatoric stress (MPa)
Table 1. Definition of domains in accordance with the
rock damage.
.
300
.
ε =1.5.10-5/s
.
200
ε. =1.5.10-6/s
ε =1.5.10-7/s
.
ε =1.5.10-8/s
.
ε =1.5.10-9/s
150
100
50
0
0
0,1
0,2
0,3
0,4
0,5
Axial strain(%)
Figure 7. Simulation of triaxial tests at several strain rates
(confinement: 10 MPa).
3.3
Results interpretation
The formulation of the constitutive model and some
initial assumptions allow interpretation of computational results in accordance with physical criteria. For
example, it’s not always interesting and useful to
estimate accurately ground displacements induced by
a tunnel excavation in a hard rock. In this case, the
collapse mechanism is a brittle failure, which occurs
violently and rapidly without any significant advance
movements.
In the framework of studies for underground
nuclear waste repositories in hard rock masses, it
seems more accurate to interpret numerical simulations using 2 kinds of results:
of the dilatancy. As long as the rock stays only fissured, the dilatancy increases. As soon as the rock is
fractured, the dilatancy starts to decrease. It’s an
important aspect because we assume that the evolution of the rock mass water permeability is a function
of this irreversible volumetric strain, in accordance
with the following equation:
1. The physical state of the rock.
2. The evolution and increasing of the rock mass permeability.
Depending on the hardening level, which is characterized by the hardening variable p, it’s possible to
estimate qualitatively the local damage of the rock
(see Table 1).
(9)
– If p 0, the rock is assumed to be intact.
– During the first phase of softening, as long as the
parameter s(p), so the cohesion, is not null, the
rock is assumed to be fissured. This cracking may
be generated by a stress variation (activating of the
plastic mechanism) or/and the delayed behavior
(activating of the viscoplastic mechanism).
– As soon as the parameter s(p) becomes equal to zero,
it’s assumed that the cohesion at a macroscopic scale
is null. Physically, this corresponds to the creation of
a continuous fracture crossing the elementary volume of rock. The global mechanical behavior is governed by the mechanical response of the fracture
under a shear loading. During the fracture slide, the
dilatancy will involve until a residual state is reached.
where k is the current permeability, k0 is the ground’s
initial permeability, pv is the volumetric plastic strain
induced by the load, and is an adjustment parameter
for the model.
Figure 8 shows the theoretical evolution of the
relative permeability in accordance with the deviatoric
stress for a triaxial test under 10 MPa of confinement.
The strain rate is assumed to be 1.5 10 5/s.
4 SIMULATION OF THE GALLERY
The excavation of the gallery is simulated in two phases:
– Phase 1: Simulation of the short term behavior
during excavation phase using the elastoplastic
The main difference between these two last physical
configurations of the rock is the associated evolution
39
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-05.qxd 08/11/2003 20:16 PM Page 40
Two domains may be observed:
version. The excavation is simulated by a progressive reducing of initial stresses existing on the
gallery perimeter.
– Phase 2: Simulation of the long term behavior of
the gallery, using viscoplastic version of the constitutive model. Initial state of stresses and hardening
parameters at the beginning of this phase are issued
from the previous elastoplastic step. This long term
analysis is continued until a stabilization of mechanical phenomena.
4.1
1. An intact zone rock: In this area, the stress level
is enough low to be under the damage criterion.
No viscoplastic strains will appear in this domain
without significant change of the stress diagram
around the tunnel.
2. A fissured rock zone: At the roof and under the
invert, one part of the rock mass is fissured. In this
domain, the state of stresses is sufficient to be
above the damage criterion. Some viscoplastic
strains may be created in time in these zones. With
the time, viscoplastic strains will appear in these
zones, generating a negative hardening of the peak
criterion. If this hardening is sufficient, the rock
will locally loose its cohesion. At this moment, it
could assume that a macroscopic induced fracture
has been created.
Damage of rock at short term
The Figure 9 shows the state of the rock around the
gallery at the end of the excavation process.
Deviatoric stress (MPa)
350
300
Simulation
4.2
Evolution of the damage in time
250
Figures 10–13 show the increasing of a fractured
zone above and below the gallery in time. There is an
Experimental results
200
150
Strain rate: 1.5e-5/s
Confinement: 10MPa
100
Fractured rock
50
0
0,1
1
10
100
1000
10000
Relative permeability k/k0
Figure 8. Lac de Bonnet granite – evolution of the permeability during a triaxial test in the pre-peak domain
(confinement: 10 MPa).
Tension zone
Fissured rock
2 months
Figure 10. Theoretical damage state of rock after 2 months.
Fractured rock
Fissured rock
Tension zone
Intact rock
Fissured rock
2 years
Figure 9. Damage state of rock around Mine-by test tunnel
at the end of the excavation.
Figure 11. Theoretical damage state of rock after 2 years.
40
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-05.qxd 08/11/2003 20:16 PM Page 41
the fracturing process over several years. From these
theoretical results, it’s only after several hundred
years that this fracturing will stop.
From available information, it seems that the
expansion rate of the fractured zone is too slow and
that this evolution has been more rapid (apparently,
few months). However, we have to precise that only
one simulation has been done using set of parameter
coming from an adjustment with few laboratory tests.
It could be now possible to do a back analysis and
to adjust some parameters like “n” and “A” which
govern the kinematic viscoplastic strains creation.
Despite this, after several years, when the stabilization
is reached, the shape of the fractured zone is similar to
these which has been observed on site (Fig. 14).
Figure 15 shows the evolution of the parameter “s”
versus time. This variable represents the cohesion of
expansion of the fracturing in the vicinity of the
tunnel in time. This expansion is located in highly
stressed zone. Table 2 presents the depth of the fractured zone at the crown versus time.
In accordance with rheological parameters estimated before, the simulation shows an evolution of
Fractured rock
Tension zone
Fissured rock
4 years
Figure 12. Theoretical damage state of rock after 4 years.
Fractured rock
Tension zone
Fissured rock
10 years
Figure 14. Theoretical damage state of rock at long term.
Figure 13. Theoretical damage state of rock after 10 years.
1
Parameters ⇔ Damage indicator
0,9
Table 2. Depth of the fracture zone versus time.
Time
Thickness of the
fractured zone in roof (cm)
2 months
1 year
2 years
4 years
10 years
100 years
500 years
1,000 years
10,000 years
15
20
25
35
43
54
65
65
65
0,7
0,6
0,5
0,4
0,3
Distance to the crown 71 cm
0,2
Distance to the crown 60 cm
0,1
0
50 cm
0
100
200
300
400
500
600
700
800
900 1000
Years
Figure 15. Evolution of the damage indicator versus time
above the crown.
41
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
0,8
09069-05.qxd 08/11/2003 20:16 PM Page 42
4.3
the rock. As long as it isn’t null, the rock is intact or
only fissured. So, this value is a damage indicator.
According to rheological parameters retained, Figure 15
show that the damage continues to involve during a
long time. This is the case at a distance of 71 cm
above the crown. Even if the kinematic is not correct
in our simulations, the results are similar to monitoring results. Several years after the end of excavation,
some acoustic emissions have still been registered
while fracturing process is stopped.
Evolution of the permeability in time
Damage of the rock results in a local increasing of the
rock macroscopic hydraulic permeability. This increasing is in accordance with the suggested Equation (9).
Considering the parameter , which has been adjusted
on triaxial test results, this increasing could be about
several order of magnitude in the fractured zone.
Figures 16–19 show increasing of the permeability
around the mine-by test tunnel.
20 days
2 ans
Log(k/k0)
Log(k/k0)
Figure 16. Increasing of the hydraulic permeability after
20 days.
Figure 18. Increasing of the hydraulic permeability after
2 years.
1000 years
2 months
Log(k/k0)
Log(k/k0)
Figure 19. Increasing of the hydraulic permeability after
1000 years.
Figure 17. Increasing of the hydraulic permeability after
2 months.
42
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-05.qxd 08/11/2003 20:16 PM Page 43
Considering there is little published information
about creep behavior of the Lac de Bonnet granite, a
simulation has been done using this model. It seems
that this time behavior could justify the apparent low
field strength of the granite in comparison with the
laboratory strength. Only one computation has been
done and parameters of the model have not been
adjusted after this first simulation. However, even if
the kinetic seems too slow, this computation allows
us to find the observed failure mechanism in high
stressed zones, associated with an increase of
hydraulic permeability.
k/k0=10
k/k0=100
Fractured zone
REFERENCES
Cai, M., Kaiser, P.K. & Martin, C.D. 2001. Quantification
of rock mass damage in underground excavation from
microseismic event monitoring. Int. J. Rock Mech. &
Min. Sci. 38, 1135–1145.
Diederichs, M.S. 2002. Stress induced damage accumulation and implications for hard rock engineering. In
Hammah et al. (eds), NARMS-TAC 2002, 7–10 July 2002.
University of Toronto press.
Eberhardt, E, 2001. Numerical modelling of three-dimension
stress rotation ahead of an advancing tunnel face. Int. J.
Rock Mech. & Min. Sci. 38, 499–518.
Laigle, F. 2003. Modélisation rhéologique des roches adaptée à la conception des ouvrages souterrains. Ph.D. Ecole
Centrale de Lyon, in prep.
Morlier, P. 1966. Le fluage des roches. Annales de l’institut
technique du bâtiment et des travaux publics: 80–111.
Read, R.S., Chandler, N.A. & Dzik, E.J. 1998. In situ
strength criteria for tunnel design in highly-stressed rock
masses. Int. J. Rock Mech. & Min. Sci. 35, 261–278.
Sangha, C.M. & Dhir, R.K. 1972. Influence of time on the
strength, deformation and fracture properties of a lower
Devonian sandstone. Int. J. Rock Mech. & Min. Sci. 9,
343–354.
Schmidtke, R.H. & Lajtai, E.Z. 1985. The long-term strength
of Lac du Bonnet Granite. Int. J. Rock Mech. Min. Sci. &
Geomech. Abstr. Vol. 22, N°6, 461–465.
Wiid, B.L. 1970. The influence of moisture on the prerupture fracturing of two rock types. Proc. 2nd Cong. Int.
Soc. Rock Mech., Belgrade. 239–245.
Figure 20. Increasing of the hydraulic permeability at very
long term.
Figure 20 shows that the increasing of hydraulic
permeability is not only located in the fractured zone,
but also in the fissured zone. Possible permeability
changes in tension zones are not taken into account in
the presented approach.
5 CONCLUSION
Even in very hard rock like granites, a delayed behavior could exist. This phenomenon could result in a
progressive damage of rock and delayed failure.
Several microscopic theories have been suggested to
physically justify this delayed behavior in cohesive
rocks. One explanation could be a “stress corrosion”
in high stressed zones around existing and induced
cracks. The aim of the presented work here was to
suggest a macroscopic and phenomenological model
taken into account this behavior. This model has been
integrated in EDF’s local version of FLAC.
43
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-06.qxd 08/11/2003 20:17 PM Page 45
FLAC and Numerical Modeling in Geomechanics, Brummer et al. (eds)
© 2003 Swets & Zeitlinger, Lisse, ISBN 90 5809 581 9
Prediction of deformations induced by tunneling using a
time-dependent model
A. Purwodihardjo & B. Cambou
Laboratoire de Tribologie et Dynamique des Systèmes, Ecole Centrale de Lyon, France
ABSTRACT: Since the past 30 years, the research for estimating an accurate prediction of deformations
induced by tunneling has been a major engineering challenge all around the world. The in situ measurements
have shown that deformations of the soil on the vicinity of a tunnel show a strong evolution with time. Three
essential phenomena, actually, can be related to this evolution: the evolution with time of the distance to the
working face, the distance of the lining to the working face and the viscous effects occurring in the soil.
The objective of this paper is to propose a procedure for predicting the deformations induced by tunneling,
by taking into account these three essential phenomena, particularly the third phenomenon. Therefore, in this
study, a constitutive model for the time-dependent behavior of cohesive soil has been developed within the
framework of elastoplasticity–viscoplasticity and critical state soil mechanics. The consideration of viscoplastic characteristic sets the current model apart from the CJS model, and introduces an additional viscous mechanism. The evolution of the viscous yield surface is governed by a particular hardening called “viscous
hardening” with a bounding surface.
To describe this procedure and the capability of the model, a comparison between numerical calculations and
monitoring the progressive closure of tunnel conducted in the TGV tunnel of Tartaiguille, is performed. The
finite difference software, Fast Lagrangian Analysis of Continua (FLAC), has been used for the numerical simulation of the problems. The comparison results show that the observed deformations could have been reasonably predicted by using the proposed excavation model.
been developed in the Ecole Centrale de Lyon, to analyze the influence of these essential phenomena in the
prediction of deformations induced by tunneling by
using numerical methods. This model is within the
framework of elastoplasticity–viscoplasticity from
the basic elastoplastic model (CJS model) including
an additional viscous mechanism.
1 INTRODUCTION
The behavior of a tunnel is greatly influenced by the
characteristics of the soils and the tunneling procedure.
They will give a strong influence to the initial and long
term deformations on the vicinity of a tunnel and on the
ground surface, particularly when the ground traversed
by tunnels has poor geotechnical characteristics: little
or no cohesion, medium-high deformability and high
viscosity. In this area, more considerations should be
taken because deformations of the soil on the ground
surface and on the vicinity of a tunnel show generally a
strong evolution with time. This evolution is essentially
related to three phenomena, i.e. the evolution with time
to the distance from the working face (the advance rate
of tunneling), the distance of the lining to the working
face and the viscous effects occurring in the soil.
To predict the deformations induced by tunneling
by considering these three phenomena, a better understanding of these influences and proper considerations
of their effects on the support design and installation
are required. Therefore a time-dependent model has
2 DESCRIPTION OF THE MODEL
The CJS model is a constitutive model with different
hierarchical levels which has been developed 16 years
ago in the Ecole Centrale de Lyon (Cambou & Jafari
1987, Maleki 1998). This model is based on nonlinear
elasticity and two mechanisms of plasticity. It also
takes into account the dependency on density of geomaterials through the critical state. The rate of the
strain tensor can be decomposed into an elastic part
and a plastic part. The plastic deformations consist of
an isotropic and a deviatoric mechanism. Figure 1
shows the two plastic mechanisms in the CJS model.
45
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-06.qxd 08/11/2003 20:17 PM Page 46
The yield surface’s evolution is defined by an
isotropic hardening mechanism depending on a scalar
variable Q and Tr is a parameter of the model to take
into account the cohesion. The hardening rule has the
form:
(5)
The isotropic flow rule is described as:
(6)
Figure 1. Plastic deviatoric mechanism and plastic
isotropic mechanism in CJS.
Kp is the plastic bulk modulus and n is a parameter of
the model which can be determined by experimental
test. i is a plastic multiplication for the isotropic
plastic mechanism.
The total strain of the model is decomposed in four
parts:
(1)
2.1.3 Deviatoric plastic mechanism
In the deviatoric plastic mechanism, for the sake of
simplicity no kinematic hardening but only isotropic
hardening is taken into account (CJS level 2). The
yield surface can be written as:
The first part is an elastic mechanism, the second part
is an isotropic plastic mechanism, the third part is a
deviatoric plastic mechanism and the last part is concerned with an added viscous mechanism.
2.1
(7)
Brief description of the basic elastoplastic
model of CJS
2.1.1 Elastic mechanism
The elastic law is given by the following incremental
nonlinear relation:
where is a parameter of the model and Tr is a parameter of the model to take into account the cohesion.
The evolution of the yield surface is characterized
by the evolution of R with the internal variable p. The
relationship between R and p is written as:
(2)
where I1 and S are the first invariant and the deviatoric part of stress tensor while K and G are the bulk
and shear modulus, respectively, which depend on the
stress state through a power law:
(8)
(3)
where Rm is a parameter that corresponds to a radius
of the rupture surface and A is a parameter of the
model. The evolution of p is defined by:
K oe , Go and n are parameters while Pa is a reference
pressure which equals to 100 kPa.
(9)
2.1.2 Isotropic plastic mechanism
The yield surface associated to this mechanism is a
plane perpendicular to the hydrostatic axis. The yield
surface is given by:
The deviatoric flow rule is given by:
(10)
(4)
46
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-06.qxd 08/11/2003 20:17 PM Page 47
where d is a plastic multiplication for the deviatoric
plastic mechanism. The deviatoric potential function
(gd) used in relation (10) corresponds to a non-associated plastic mechanism. Tensor nij is a symmetrical
tensor so that tr(n2) 1 and is a tangential tensor to
the surface corresponding to the potential function. It
is defined by:
S11
rupture surface (Rm)
characteristic
surface (Rc)
yield surface (R)
(11)
S22
S33
Figure 2. Different surfaces in the deviatoric mechanism
of the CJS model.
c
where SII represents the second invariant of the deviatoric part of stress in the characteristic state and is a
parameter of the model. The characteristic surface is
defined by:
SII
(12)
e°II
where Rc represents the radius of the characteristic
surface. Figure 2. shows the deviatoric mechanism in
the CJS.
eII
Figure 3. Strain softening behavior in the CJS model.
2.1.4 Critical state
Two important phenomena can be noted from the
drained triaxial tests:
2.1.5 Strain softening model
The CJS model takes into account the strain softening
behavior of the soil which depends on the accumulated deviatoric strain. This model is made up of three
portions, an elastoplastic portion up to the peak
strength, a softening portion in which the strength (Rc
and Tr) reduces from the peak to residual, and finally,
a constant residual strength portion. Figure 3 shows
the strain softening behavior in the CJS model.
– an increase of the peak resistance with the initial
density of material
– the material tends to the state called the critical state
characterized by a null volume variation and a ratio
q/p constant independent to the initial density.
To take into account these phenomena and be
inspired by the formulation developed by the
Cambridge University (Roscoe et al. 1968), in this
model, the radius of rupture surface varies as a function of the mean effective stress and the density of
material. For simplifying the problem, we take the
critical state similar to the characteristic state. Hence,
the evolution of rupture surface is defined by:
2.2
Viscous hardening with a bounding surface
The viscous effect of the soil is connected with an
internal characteristic. This internal characteristic is
represented by a creep surface which is bounded by a
(current) state of stress surface defined by Equation
20. It means that the creep surface can evolve but the
evolution is limited by the state of stress surface. So
we call this function as a viscous hardening with a
bounding surface, where the bounding surface in this
case is the state of stress surface. Meanwhile, the evolution of state of stress surface is limited by the yield
surface (elastoplastic concept). The evolution of the
yield surface is limited by the rupture surface. Figure 4
shows an illustration of viscous evolution concept
with a bounding surface.
The basic formulation for this viscous mechanism
is inspired by the overstress model of Perzyna (1966).
(13)
where is a parameter of the model, and pc is a critical pressure which is defined by:
(14)
where c is a parameter of the model, pco is a critical
pressure corresponding to the initial density and v is
an accumulated volume strain.
47
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
e IIf
09069-06.qxd 08/11/2003 20:17 PM Page 48
reduced as a passing point between the primary creep
and the tertiary creep. This idea has been selected for
the sake of simplicity in the measurement of the distance in the stress space. This function is defined by:
S11
rupture surface (Rm)
yield surface (R)
state of stress
artificial state of stress
surface (Re)
creep surface
S22
(17)
where Rv corresponds to the radius of the creep surface. The power m in relation (16) is defined as:
S33
(18)
Figure 4. Illustration of viscous evolution concept with a
bounding surface.
where m1 and m2 are parameters of the model.
Lade (1998) has shown in his laboratory test
results that the potential plastic surfaces for the elastoviscoplastic and the elastoplastic are homothetic.
Based on this idea, it means that the direction of the
plastic strain in the elastoplastic is similar to the viscoplastic one. Thus, the direction of viscoplastic
strain is defined as:
To keep on near to the framework of elastoplasticity is
the reason of the use of this formulation. The idea is,
then, starting from the general framework of elastoplasticity and introducing the viscosity of material
and the retardation function.
Many authors, (Katona 1984, Adachi 1982,
Sekiguchi 1984, etc.), have employed this formulation, and they have shown that this model is incapable
to introduce the acceleration deformation phenomenon in the case of tertiary creep. Therefore the ambition of the proposed model is to take into account the
tertiary creep.
Thus, three important terms have to be defined in
the framework of this model. The first one is the viscosity of the material, the second one is the function
of retardation and the last one is the direction of the
viscoplastic strain. The function is as follows:
(19)
where f e is the artificial state of stress surface which
is homothetic to the yield surface for the deviatoric
mechanism. It is defined by:
(20)
The rupture surface is defined by:
(15)
(21)
The creep surface is defined by:
where 1/ is the viscosity of the material, (v/r) is
the function of retardation and Gijvd is the direction of
the viscoplastic strain.
The viscosity of the material in this model is a
function of the distance of the state of stress surface
(Re) to the rupture surface (Rm). This function is
defined by:
(22)
The evolution of the creep surface is given by:
(23)
(16)
Av is a parameter of the model and eIIvd is an accumulated deviatoric viscoplastic strain, which is
defined by:
where 0 is a parameter of the model, Re is the radius
of the current state of stress surface, Rm is the radius of
the rupture surface and k is a parameter of the model.
The function of retardation, (v/r), is inspired by
the bounding surface theory (Kaliakin & Dafalias
1990). This function will drive the evolution of the
three types of creep. The secondary creep will be
(24)
where eII is the deviatoric viscoplastic strain rate.
48
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-06.qxd 08/11/2003 20:17 PM Page 49
2.3
Parameter identification
The identification of elastoplastic mechanism parameters can be determined by using classical laboratory
tests. The procedure for calibrating the model parameters is briefly defined by Maleki (1998). Drained or
undrained creep tests with different levels of stresses
have to be achieved, for identifying the viscoplastic
mechanism parameters.
3 CALCULATIONS
3.1
Presentation of the case studied
The tunnel of Tartaiguille is located on the new
Méditerranée high-speed line between Valence and
Montélimar (France). All these structures are double
track single tube, allowing a speed of 300 km/h. It
crosses fractured limestones on the north sides, stiff
marls and sandstones in the south and stampian clays
in the central parts.
Convergence measurement devices had been
installed by CETU (Centre d’Etudes des Tunnel) during construction processes in this tunnel. PM 1168
has been selected as the simulation data in the deformation analysis. From the cross section of the tunnel,
we can see that the support of the tunnel is a shotcrete
(thickness 300 mm) and a steel frame every 1.5 m.
Five samples of soil blocks have been obtained and
these blocks have been studied in detail by Serratrice
(1999) (Laboratoire Regional des Ponts et Chaussées
d’Aix en Provence). From the five samples of soil
blocks, three layers of soil can be concluded at that
section. The upper one is the black marl, the middle
one is the calcareous marl and the lower one is the
grey marl. The soil characteristics for the black marl
and the grey marl are almost similar, on the other
hand the soil characteristics of the calcareous marl is
significantly different. The calcareous marl is stiffer
than the black marl and the grey marl. For the sake of
simplicity, only two types of soil will be considered,
for the upper one and the lower one, we will use the
same parameters of soil.
Figure 5 shows the dimensions of the tunnel and
Figure 6 shows the soil stratigraphy at section PM 1168.
3.2
Figure 5. Dimensions of tunnel and the measurement
position.
Figure 6. Soil stratigraphy at section PM 1168 (Lunardi
2000).
the elastoplastic and viscoplastic behavior of the soils
quite satisfactory.
3.3
Model parameters
Elastoplastic and viscoplastic model parameters identified in this analysis can be seen in Table 1. Figure 7
shows the simulation results of triaxial tests by using
elastoplastic soil parameters. Figure 8 shows the simulation results of creep tests by using elastoviscoplastic soil parameters.
It can be seen from Figures 7 & 8 that the simulation results are closely match to the experimental
results. It means that this model can take into account
49
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
Plane strain calculations
The convergence curves of the unsupported tunnel
are derived by using virtual support pressures in plane
strain calculations (Panet et al. 1982, AFTES 2002).
Two types of calculation have been achieved. The
first one is by using the circular shape of tunnel with
R 7.65 m, Ko 1.0, only used one soil layer (black
and grey marl parameters) and the second one is by
using the actual shape of the tunnel, the actual value
of Ko 1.2 and the actual soil layers. The objective of
this calculation is to get the result comparison
between those two shapes for the reason that the calculation taking into account the distance from the
working face and the progressing of the tunneling
09069-06.qxd 08/11/2003 20:17 PM Page 50
Table 1. Parameters of the model.
Parameter
Black and grey marl
Calcareous marl
Density (kN/m3) 22.15
Elastoplastic parameters
Go (MPa)
27
K oe (GPa)
139
Rm
0.103
0.3616
Rc pic(Rc res
0.0784
A (kPa 1)
2
n
0.7
p
K o (MPa)
139
c
60
0.033
pco (MPa)
17
0.005
Tr pic (MPa)
11.825
Tr res (MPa)
7.112
e°II
0.02
ef
0.065
96.15
208.33
0.2661
0.7852
0.213
25
0.6
208.33
75
0.05
40
0.38
8.768
5.273
0.02
0.065
Viscoplastic parameters
Av
125
0
108
k
6.0
m1
0.3
m2
0.0
450
106.69
30.673
0.4083
8.0214
II
24.34
Figure 8. Simulation results of drained creep tests.
On the other hand, in the second calculation, the two
type parameters of soil have been employed. The
overburden pressure height is 100 m from the crown
of the tunnel and the ground water table is 6.6 m from
the ground level.
3.4
This computation is performed by using the sequential excavation method (SEM) in the axisymmetric
condition. Distance to the working face is defined by d
and the advance rate of the excavation is defined by p.
Figure 12 shows the geometry of the tunnel in the
axisymmetric calculation and Figure 13 shows the
mesh used in the axisymmetric calculation.
Figures 9 and 10 show the mesh used in the plane
strain calculations and Figure 11 shows the comparison results of the convergence analysis between the
two shapes. From that figure, the ratio between the
actual shape and the circular shape can be determined, and we get the ratio of convergence (RT) at
position F-G equal to 0.885. This ratio will be used
for adjusting the axisymmetric calculations, since in
the axisymmetric calculations, we can only use the
circular shape, Ko 1.0 and one layer of the soil.
The lining support in this tunnel is a combination
of shotcrete ring and steel frame. So for simplifying
the analysis, the equivalent stiffness of the lining of
Figure 7. Simulation results of triaxial tests.
will be performed using an axisymmetric calculation
(see section 3.4). The result comparison obtained in
the plane strain calculation allows the results obtained
in the axisymmetric condition to be transformed to
take into account the actual conditions of the tunnel
section. This approximation has been taken because
those two shapes are almost similar and the calcareous marl is not dominant.
In the first calculation, a quarter of tunnel geometry has been modeled, and for the soil parameters, the
black and grey marl parameters have been employed.
50
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
Axisymmetric calculation
09069-06.qxd 08/11/2003 20:17 PM Page 51
Figure 11. Comparison of convergence analysis.
Figure 9. Mesh used in the circular shape.
Figure 12. Geometry of the tunnel in the axisymmetric
calculation.
In this calculation, the black and grey marl parameters have been used because they are more dominant
than the calcareous marl in the soil stratigraphy. For
the SEM analysis, we use d 1.5 m and p 1.5 m
(the advance length of tunneling).
The convergence of the tunnel is determined by:
Figure 10. Mesh used in the actual shape.
the combined lining support has been used. The elastic model is used for this lining.
For modeling the ground anchor on the working
face, the equivalent pressure on the working face has
been used (Peila 1994). This pressure is determined by:
(26)
where U(x) is the deformation of the tunnel as a function of the distance from the working face, U(o) is the
deformation of the tunnel on the working face and RT
is the shape ratio of the tunnel.
In the first simulation, the influence of the advance
rate of the tunneling is illustrated. Three types of the
advance rate are used, i.e. 1.5 m per 0.5 day, 1.5 m per
1.0 day and 1.5 m per 2.0 day. The elastoplastic calculation is used to represent the infinite advance rate
of tunneling. The tunneling simulation results can be
seen in Figure 14.
From that figure, we can see that the convergence
of the tunnel can be reduced by increasing the
(25)
where n is the number of the anchor, Tb is the tensile
strength of the anchor, Sb is the shear strength of
the anchor, and S is the working surface area. In this
tunnel, 120 fiberglass anchors with 800 kN tensile
strength have been installed on the working face to
stabilize the working face.
51
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-06.qxd 08/11/2003 20:17 PM Page 52
Figure 13. Mesh used in the axisymmetric calculation.
Figure 15. Convergences of the tunnel as a function of the
distance from the working face.
also in the case of viscous materials, a time-dependent
model is very essential.
4 CONCLUSIONS
Analysis of deformations due to tunneling using the
elastoplastic–viscoplastic constitutive model has been
performed in this study.
It has been demonstrated that the influence of viscous effects cannot be neglected in the soil which has
been analyzed. It means that the role of the timedependent model in this case is very important and a
necessity. The influence of viscous effects can be
reduced by increasing the advanced rate of tunneling
but an attention to the lining should be taken because
the load transfer to the lining will be higher. This
becomes significant when there is a large distance
between the installation point of the lining and the
working face, and could induce plastic deformation
around the tunnel.
The calculation procedure proposed has provided an
effective approach for analyzing the ground-structure
interaction situation and offers a systematic way of
optimizing lining design. This kind of calculation can
be improved by using a complete 3D approach.
However, this is a rather difficult calculation and the
computation time will be long. In practice, the 2D and
the axisymmetric analysis can be successfully used to
develop a pragmatic solution.
The constitutive model, which has been presented,
is quite satisfactory to model the elastoplastic–
viscoplastic behavior of the soils. The parameters of
the model can be identified by using the classical laboratory tests such as, triaxial tests and creep tests.
Figure 14. Tunneling simulation results in elastoplastic–
viscoplastic calculation.
advance rate of tunneling. Actually, in this case, we
prevent the evolution of the creep deformation. If we
only use the elastoplastic constitutive model, we cannot illustrate this phenomenon. The total elastoviscoplastic deformation of the tunnel could be two or
three times bigger than the elastoplastic deformation.
In the second simulation, the actual advance rate of
tunneling at section PM 1168 is used. The sequences
of the actual excavation are as follows:
1. Excavating the upper section with the advance
rate: 1.5 m per 0.5 day until 6 m.
2. Stopping for one day (to represent the excavation
of the lower section).
3. Continuing the excavation of the upper section
with the advance rate: 1.5 m per 0.5 day until 6 m.
4. Stopping for three days (to represent the excavation of the lower section and the installation time
of the anchors on the working face).
5. Continuing the four sequences above.
The measurements at position F-G (see Figure 5)
are started after 6 m from the working face. Figure 15
shows the comparison results between the calculations and the measurements started from the first
measurement (6 m from the working face).
From those figures we can see that the model proposed can model acceptably the viscous behavior of
the soil in the tunneling. It has been demonstrated
ACKNOWLEDGEMENTS
The authors gratefully acknowledge the information on
the geotechnical data and the convergence data provided
52
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-06.qxd 08/11/2003 20:17 PM Page 53
Lunardi, P. 2000. The design and construction of tunnels
using the approach based on the analysis of controlled
deformation in rocks and soils, ADECO-RS.
Maleki, M. 1998. Modélisation hiérarchisée du comportement des sols, Phd. Thesis, École Centrale de Lyon.
Panet, M. & Guenot, A. 1982. Analysis of convergence
behind the face of a tunnel, Tunneling’ 82: 197–204.
Peila, D. 1994. A theoretical study of reinforcement influence on the stability of a tunnel face, Geotechnical and
Geological Engineering, 12.
Perzyna, P. 1966. Fundamental Problems in viscoplasticity.
Advances in Applied Mechanics, Vol. 9: 243–377.
Roscoe, K. H. & Burland, J. B. 1968. On the Generalised
Stress-Strain Behavior of ‘Wet Clay’, Engineering
Plasticity, J. Heyman and F. A. Leckie (Eds). Cambridge:
Cambridge University Press: 535–609.
Sekiguchi, H. 1984. Theory of undrained creep rupture
of normally consolidated clays based on elastoviscoplasticity, Soils and foundations, Vol. 24, No. 1:
129–147.
Serratrice, J.F. 1999. Tunnel de Tartaiguille (Drôme) TGV
Méditerranée, Essais de laboratoire sur la marne, LRPC
d’Aix en Provence.
by Mr. Alain Robert and Mr. Adrien Saïtta from
CETU (Centre d’Etudes des Tunnel), Lyon, France.
REFERENCES
Adachi, T. & Oka, F. 1982. Constitutive equations for normally consolidated clays based on elasto-viscoplasticity,
Soils and foundations, Vol. 22, No. 4: 57–70.
AFTES. 2002. La méthode convergence-confinement,
Tunnels et ouvrages souterrains, No 170: 79–89.
Cambou, B. & Jafari, K. 1987. A constitutive model for granular materials based on two plasticity mechanisms.
Constitutive equations for granular non-cohesive soils,
Saada & Bianchini (Eds), Balkema, Rotterdam: 149–167.
Kaliakin, N. & Dafalias, F. 1990. Theoretical aspects of the
elastoplastic-viscoplastic Bounding surface model for
cohesive soils, Soils and foundations, Vol. 30, No. 3: 11–24.
Katona, M. G. 1985. Evaluation of viscoplastic cap model,
Journal of Geotechnical Engineering, Vol. 110, No. 8:
1107–1125.
Lade, P. V. 1998. Experimental Study of Drained Creep
Behavior of Sand, Journal of Engineering Mechanics,
Vol. 124, No. 8, August: 912–920.
53
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-07.qxd 08/11/2003 20:43 PM Page 55
FLAC and Numerical Modeling in Geomechanics, Brummer et al. (eds)
© 2003 Swets & Zeitlinger, Lisse, ISBN 90 5809 581 9
Modeling of anhydrite swelling with FLAC
J.M. Rodríguez-Ortiz
Gamma Geotécnica SL, Madrid, Spain
P. Varona & P. Velasco
Itasca Consultores SL, Asturias, Spain
ABSTRACT: Anhydrite and rocks containing argillaceous minerals experience swelling phenomena when
they come into contact with water. In tunneling, this can lead to a strong heave of the floor and to a high level
of stresses in the lining. Although characterization of swelling potential, monitoring of swelling process, and a lot
of relevant case histories of tunnel construction in swelling rocks are currently available, the design of the support
in swelling rocks usually do not consider an accurate stress–strain relationship for the swelling. Current trend
in tunneling design considers numerical modeling of the rock-support interaction, but the available geotechnical codes do not include the swelling formulation. This paper presents the implementation in FLAC (via FISH
routines) of the analytical stress–strain formulation for the swelling presented by Wittke (1999) and the validation of this algorithm against the swelling tests carried out by different authors and presented by Wittke (1999).
created at the surface of the grains inhibits the water
penetration stopping the process. In the case of interbedded anhydrite-mudstone the swelling process
leads into the disintegration of the rock, reducing its
strength. Steiner (1993) quantifies this reduction of
strength with an angle of friction of 20°.
1 DESCRIPTION OF THE ANHYDRITE
SWELLING PHENOMENA
1.1
Chemical description
Calcium sulphate appears naturally as two different
minerals: gypsum (CaSO4.H2O), in which water
appears within the crystalline structure, and anhydrite
(CaSO4). The hydration of anhydrite is a complex
process that depends on the pressure and the temperature. For ambient conditions the chemical reaction is
illustrated in Table 1.
With an external inflow of water, the volumetric
increment associated to this process is presented in
Equation 1:
1.2
The International Society of Rock Mechanics has proposed a set of tests to quantify the swelling of argillaceous rocks: the Maximum Axial Swelling Stress test,
the Axial and Radial Free Swelling Strain test, and the
Axial Swelling Law test (axial swelling stress as a
function of axial swelling strain, or Huder-Amberg
swelling test).
An illustration of the results from the HuderAmberg swelling test (total vertical strain of the sample,
z in %, versus vertical load, z in kPa) is presented in
Figure 1, taken from Wittke (1999). Stages 1, 2 and 3
correspond to the initial loading phase with 2 load
cycles; stage 4 corresponds to the watering of the
sample (no stress increment but strain increment),
and finally stage 5 corresponds to the different points
of the unload-swelling process. The swelling strain
equals the total strain (stage 5 of the test) minus the
elastic strain (stages 2 and 3 of the test).
If the strain due to swelling is plotted against
the stress in a semi-logarithmic scale (Figure 2) a
(1)
Transformation of anhydrite into gypsum can be
inhibited at 20°C with a pressure of 1.6 MPa; this pro
cess is reversible, being necessary a pressure of 80 MPa
at 58°C to transform gypsum into anhydrite.
Previous data refer to pure anhydrite, but in case of
interbedded mudstone-anhydrite the maximum swelling
volume is lower but the swelling stress is larger (in the
order of 2 to 5 MPa).
In the case of pure anhydrite, as the hydration pro
cess begins, the thin layer of impervious gypsum
55
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
Characterization of the swelling behavior
09069-07.qxd 08/11/2003 20:43 PM Page 56
swelling process); Kq swelling deformation parameter; z axial effective stress; and 0 axial swelling stress (as showed in Figure 2, it is intersection of
the straight line with qz 0).
Table 1. Transformation of anhydrite into gypsum.
Equation
Mass (gr)
Density (gr/cm3)
Volume (cm3)
Anhydrite water
Gypsum
CaSO4 H2O
136.14 36
2.96 1
46.2 36
CaSO4.2H2O
172.14
2.32
74.3
2 ANHYDRITE SWELLING LAW
The following description of swelling law is taken from
Wittke (1999), and starts from the axial stress–strain
relationship previously presented (Equation 2). The
swelling law only applies for compressive effective
stresses, where c (Figure 2) is a minimum stress representing the lower limit of validity of the swelling law.
As the swelling strain equals to zero for compressive
stresses larger than the swelling stress, the swelling law
can be finally formulated as Equation 3:
(3)
where qi final axial strain due to swelling in the
direction i; Kq swelling deformation parameter;
i axial stress in the direction i; 0 axial
swelling stress; and c minimum limit for the axial
stress.
Equation 3 represents the 3D (i 1,2,3, means
the 3 directions in the space) isotropic (the same Kq
parameter is considered for the 3 directions) swelling
law, where the final axial strain is reached at the end
of the swelling process.
This swelling law considers that the principal
directions of swelling qi (i 1,2,3) are coaxial with
the principal stresses i (i 1,2,3), and therefore the
value of the swelling principal strain depends only on
the value of its coaxial principal stress.
Previous relations refer to the strain reached at
the end of the swelling process. Furthermore, for the
kinetics of the process Wittke (1999) presents the following Equation 4 for the swelling strain rates at time t:
Figure 1. Swelling test of an interbedded anhydritemudstone sample (Wittke 1984, in Wittke 1999).
(4)
Figure 2. Axial swelling law (Grob 1972, in Wittke 1999).
where q swelling time parameter; qi principal
swelling strains for t ; and qi(t) principal
swelling strains which already occurred until time t.
According to Wittke (1999), the time dependence
of swelling is adequately described by Equation 4 as
long as the strength of rock is not exceeded. The plastic deformations occurring if the rock strength is
exceeded lead to a volume increase and to an increase
of permeability that accelerates the penetration of
water, increasing the swelling strain rate.
straight line is obtained which may be described by
the relationship presented in Equation 2.
(2)
where qz final axial strain due to swelling (final
deformation means deformation at the end of the
56
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-07.qxd 08/11/2003 20:43 PM Page 57
To consider this effect in the formulation, Wittke
(1999) includes the following relationship for the
swelling time parameter q, Equation 5:
t=0
σi=1,2 = f(σxx ,σyy ,τxy,θ)
σ3 = σZZ
(5)
Principal
stresses
t< T_fin
where a0, ael, avp constant values. The parameter a0
represents the dependence of the swelling velocity on
the anhydrite content, regardless of whether a strain
occurred before or not; elv is the elastic volumetric
strain occurred prior to the beginning of swelling that
also influence the permeability; pl
v is the volumetric
plastic strain; and maxEVP represents an upper limit
of the plastic volume strain with regard to an eventual
acceleration of swelling. According to Wittke (1999),
plastic volumetric strains larger than maxEVP do not
lead to a further increase of the swelling velocity
because the penetration of water into the rockmass
cannot be further accelerated by these.
Following Equation 5 the swelling time parameter
is no longer constant but dependent on time as elastic –
plastic volumetric strains varies during the swelling
process.
εqi` = Kq log σi
∆σi = f(εqi` ;λ,G)
1
ηq
Swelling strains
Associated stress
increment
=a +a . εelv +a . min{εplv , maxEVP} Swelling time
0
el
vp
parameter
10%. σi
∆σi
{ {
∆t = ηq . min
i=1,2,3
∆t = min{∆t}
min
σi = σi + ∆σi ∆tη
Minimum
timestep
min
q
σxx ,σyy , τxy = f(σi=1,2,θ)
3 FINITE DIFFERENCES CALCULATION
ALGORITHM
σzz = σ3
The swelling law presented in previous paragraphs
has been implemented in FLAC, coupling the swelling
phenomena with the built-in elastic–plastic constitutive relationships via FISH routines. The principal
concept of this algorithm is that the volumetric strain is
reached in the zones of the model introducing of
small increments of isotropic stress within them,
Noorany et al. (1999).
The sketch of the algorithm is to calculate the final
swelling strain tensor for all the zones of the model,
transform the strains into an increment of stresses,
and then “inject” the stresses in small increments into
the zones. The flowchart of the calculation algorithm
is presented in Figure 3, and can be resumed in the
following points:
Mechanical equilibrium
t = t + ∆t
min
ε = ε + (ε − εiq) ∆t
ηq
q
i
q
i
q
i`
min
“Injection” of a
fraction of the
stress increment
Solve to
mechanical
equilibrium
Accumulation of
swelling time and
swelling strains
END
Figure 3. Flowchart of the calculation algorithm.
– Solve to mechanical equilibrium of the current
timestep.
– Accumulation of swelling strains and time.
– Repetition of the algorithm until the expected age
of the simulation is reached.
– Determination of the principal effective stresses.
1 and 2 are principal stresses in the calculation
plane, and 3 is the out-of-plane stress.
– Determination of the swelling principal strains
and of the stress increments associated with these
strains.
– Determination of the swelling time parameter.
– Determination of the minimum timestep necessary
for numerical convergence of the algorithm and
to synchronize the swelling rate of all the elements
in the model.
– “Injection” of a fraction of the stress increment
associated to the swelling strain.
After initiation of swelling time to zero, the principal stress tensor for all the elements is calculated
from the current stress state. As the routine has been
implemented in a 2D model, the out-of-plane stress,
zz in FLAC, is a principal stress (3 in the formulation) but not strictly the minor principal stress.
Then, a loop is performed until the swelling time
reaches the expected simulation age. Within this loop,
the strain tensor due to complete swelling is calculated according to Equation 3. The stress increments
57
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
σ0
09069-07.qxd 08/11/2003 20:43 PM Page 58
associated to these strains are calculated with the following lineal elastic relationship, Equation 6:
To determine a value of t small enough, only a
fraction of the stress increment associated to the
remaining swelling strain should be “injected” in the
elements of the model.
A criterion of a maximum of 1% of the current
stress state has been adopted to determine de fraction of i to “inject”. The minimum fraction obtained
from the 3 principal directions in each element is
adopted. These relationships are illustrated in
Equation 11 for every element in the model.
(6)
where
and G are constants known as Lamé’s
parameters ( K 2/3G; K is the bulk modulus and
G is the shear modulus).
Previously to the calculation of the swelling time
parameter the plastic component of the volumetric
strain has to be determined.
The total volumetric strain, addressed in FLAC with
a FISH variable, is the sum of the following components, Equation 7:
(11)
where ri fraction of the stress increment i;
i stress state; and r minimum fraction of the
3 principal directions.
From Equations 6 and 11 the fraction r of the stress
increment that are going to be “injected” in the elements of the model can be expressed with the following Equation 12:
(7)
el0
where tot
v total volumetric strain; v elastic volumetric strain produced in the model previous to any
calculation; elv elastic volumetric strain produced
during the calculation; it can be calculated as
vel (1 2 3)/(3 K), being K the bulk modulus;
qv swelling volumetric strain accumulated during
calculation, qv q1 q2 q3; therefore, the plastic
volumetric strain, plv, can be calculated with the following Equation 8:
(12)
and therefore, the timestep for each element can be
obtained as, Equation 13,
(8)
(13)
The swelling strain does not occur instantaneously
but following the kinetics formulated with Equation 4.
Expressing this differential equation in finite differences we obtain the following Equation 9:
It is necessary to synchronize the rate of swelling
for all the elements of the model adopting the same
timestep for all; the minimum timestep of all the
elements is the searched,
(9)
(14)
and therefore,
The “injection” of stresses associated to the swel
ling behavior can be expressed with the following
Equation 15,
(10)
As in all finite difference algorithm schemes, this
equation applies only for values of t that are significantly low. This means that the swelling strain at time
t that still remains to produce, [qi(t) – qi(t)] cannot
be induced in the model instantaneously because the
model would degenerate. Thus, the next phase is to
determine a critical value of t to use in the finite
difference scheme.
(15)
that gives, the relationship between the current stress
state – i(t), the total increment of stresses due to
swelling – i, the minimum timestep – tmin, and
the swelling time parameter – q.
58
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-07.qxd 08/11/2003 20:44 PM Page 59
These stress increments have to be transformed from
the principal axes reference to the coordinated axes reference, assuming that the principal stresses have not
rotated during the swelling processes, and the angle
between the principal stresses and the horizontal
remains the same.
Finally, once the mechanical equilibrium has
been reached for this fraction of stresses injected into
the elements of the model, it is necessary to actualize
the accumulated swelling strain of each element of the
model, Equation 16:
(16)
and for the swelling time, Equation 17.
(17)
This procedure is repeated until the accumulated
swelling time reaches the expected age of the swelling
simulation.
Figure 4. Swelling pressure test (in Wittke 1999).
500
400
2
(kN/m )
4 VALIDATION OF THE ALGORITHM
The algorithm introduced in previous paragraphs has
been implemented in FLAC via FISH routines. Now,
the validation of this algorithm against the swelling
tests presented in Wittke (1999) is presented.
4.1
Swelling pressure test
0
0
5
10
15
t (horas)
sx
sy
sz
FLAC
Figure 5. Swelling pressure test simulation with FLAC.
v 0.33. The results from FLAC simulation are presented in Figure 7 (strain in % versus time in days)
against the results of the test.
4.3
Huder-Amberg swelling test in plasticity
The objective now is to validate the algorithm against
a test in which the strength of the sample is exceeded
and therefore, plastic strains develop in addition to
the elastic and swelling deformations.
The test was carried out following the HuderAmberg procedure. The initial vertical load (applied
in two cycles) is 15 MPa; the sample is then flooded
and unloaded to a vertical pressure of 6.5 MPa. The
results for this test are presented in Figure 8.
The elastic constants of the material are
E 2800 MPa and v 0.33, and swelling parameters are Kq 6.4% and 0 89.2 MPa.
Huder-Amberg swelling test in elasticity
Figure 6 shows the swelling strain-time curves obtained
for the different stages of loading in a Huder-Amberg
swelling test on an anhydritic mudstone from de
Gypsum Keuper.
A FLAC model with 1 element has been set up; the
constitutive model is elastic with E 1000 MPa and
59
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
200
100
The first validation test is a swelling pressure test of
a cubic sample of swelling mudstone carried out in a
triaxial test apparatus. After a load–unload cycle the
sample was flooded. Preventing the strains in the 3
directions the swelling pressures were measured in
function of time. Figure 4 presents the evolution of
the swelling pressure, in the 3 directions, versus time,
and the parameters for the swelling law.
To simulate this test, a FLAC model has been set
up; the constitutive model is elastic with the same
properties presented in Figure 4. The results from
FLAC simulation are presented in Figure 5 (stress in
kPa versus time in hrs).
As the model is isotropic, the 3 components of the
stress are identical in the simulation.
4.2
300
09069-07.qxd 08/11/2003 20:44 PM Page 60
Figure 8. Huder-Amberg swelling test in plasticity (in
Wittke 1999).
-24
-20
ez (%)
-16
Figure 6. Huder-Amberg swelling test in elasticity (in
Wittke 1999).
-12
-8
-4
0
-5
4
0.1
ε zq (%)
1
10
100
sz (MPa)
-4
Ensayo: Carga-descarga inicial
Wittke elástico
FLAC elástico
-3
Ensayo: hinchamientos
Wittke plástico
FLAC plástico
Figure 9. Huder-Amberg swelling test in plasticity simulated with FLAC.
-2
-1
with the results from the tests and the values fitted by
Wittke (1999).
0
0
5
10
15
t (días)
sz = 520 kN/m2
FLAC sz=520 kPa
sz = 260 kN/m2
sz = 130 kN/m2
sz = 65 kN/m2
FLAC sz=260 kPa
FLAC sz=130 kPa
FLAC sz=65 kPa
sz = 32.2 kN/m2
FLAC sz=32.2 kPa
4.4
Figure 7. Huder-Amberg swelling test in elasticity simulated
with FLAC.
This is a swelling test on a sample taken from Gypsum
Keuper. The test was carried out in a confined
compression test apparatus (horizontal strains of the
sample were prevented during the test) with boundary
conditions, which were variable with time for a period
of more than 14 years. The test sequence and the test
results are presented in Figure 10.
The description of the test, taken from Wittke (1999)
is as follows. Phase 1 may be divided into 4 partial
stages, form 1a to 1d. In phase 1a strains in the vertical
direction were also prevented and the vertical stress was
monitored. After 2.7 years, a vertical stress of 4.2 MPa
Wittke (1999) suggests that it is necessary to consider the plastic strain of the sample to reproduce this
test, as it is shown in Figure 8 where the back-analysis
with elastic–plastic stress–strain relationship fits better with the measured values than the back-analysis
with elastic stress–strain relationship. The plastic
constants are c 0, 11° and 5.5°.
Figure 9 presents the results from the FLAC model,
also for elastic and elastic–plastic behaviors, together
60
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
Combined swelling pressure and
swelling strain test
09069-07.qxd 08/11/2003 20:44 PM Page 61
Table 2. Elastic–plastic parameters used in Wittke (1999)
to reproduce the test.
Elastic
Plastic
Parameter
E (MPa)
v
c (MPa)
Gypsum keuper
4000
0.2
0.65
(°)
30
(°)
30
Table 3. Swelling kinetics parameters used in Wittke
(1999) to reproduce the test.
1a 2
3
Figure 10. Combined swelling pressure and swelling strain
test on a sample from Gypsum keuper (in Wittke 1999).
a0
(year 1)
ael
(year 1)
avp
(year 1)
maxEVP
(%)
0.0018
0.0018
0.0
0.0
40.0
2.0
0.1
0.1
5
was reached. Starting phase 1b it was allowed for a
small vertical strain (that is not recognizable in Figure
10 because of the chosen scale) that results in a reduction of the vertical stress to approximately 3.8 MPa.
Following to this, the vertical deformation of the
sample was again prevented, and consequently, the
vertical stress increased again to the same value of
4.2 MPa.
The course of phase 1c was equivalent to the one of
phase 1b. During phase 1d it was allowed for a vertical
strain slightly larger than during the preceding phases.
At the beginning this led to decrease the vertical stress
to less than 0.5 MPa. Subsequently, the vertical stress
was increased to 2.5 MPa over a period of 0.3 year
without stabilization of the vertical stress.
During phase 2 of the test, the vertical stress was
lowered to 0.5 MPa keeping it constant for more than
5 years. The vertical strain was measured as a function
of time. Phase 2 was stopped after a vertical strain of
approximately 28% had occurred without stabilization
of the deformations.
During the phase 3 of the test, a further increase
of the vertical strain was prevented and the increase
of the vertical stress was registered as a function of
time. The slope of the stress–strain curve decrease
continuously with time and after a period of 5.7 years a
vertical stress of 4 MPa was measured.
Wittke (1999) reproduced this test with the elastic–
plastic properties presented in Table 2.
For the swelling parameters, Wittke (1999) uses
the following values, 0 16 MPa and Kq 15%.
Nevertheless, regarding on the kinetics of the swelling,
Wittke found necessary to change the swelling time
parameter during the course of the test. The parameters
proposed are presented in Table 3.
As Wittke (1999) refers, to reproduce accurately the
phase 3 of the test it is necessary to reduce the value
z(MPa)
4
2
1
0
0
5
t (años)
Ensayo
10
15
FLAC
Figure 11. Combined swelling pressure–strain test simulated with FLAC; comparison of stresses.
of the coefficient avp from 40 year 1 to 2 year 1, that
is equivalent to a reduction of the permeability of the
sample during phase 3 due to the increment of the
vertical stress in this phase of the test.
Changes in permeability of the sample during
the load process are not taken into account in the
formulation of the kinetic, thus Wittke (1999) suggests
that the coefficient avp should vary during the calculation for an accurate simulation of the swelling process.
The test described in this paragraph has been simulated with FLAC, considering the same parameters
(in Table 2 and Table 3). Figure 11 presents the evolution of the vertical stress (in MPa) versus time (in
years), comparing the results from FLAC simulation
against the test.
Figure 12 presents the evolution of the vertical
strain (in %) versus time (in years), comparing the
results from FLAC model against the test.
61
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
3
09069-07.qxd 08/11/2003 20:44 PM Page 62
– All the elements of the model are susceptible to
swell; this means that the whole rockmass is saturated and the penetration of water is enough to permit the complete swelling of the anhydrite.
– The proposed kinetics describe adequately the
swelling process when the strength of the rock is
not exceeded, but the parameters of the formulation need to be changed in case of large plastic
deformations.
40
εz (%)
30
20
10
0
0
5
10
15
REFERENCES
t (años)
Ensayo
Cálculo FLAC
ISRM 1989. Suggested Methods for Laboratory Testing of
Argillaceous Swelling Rocks. In Int. J. Rock Mech. Min.
Sci. & Geomech. Abstr, Vol. 26, No. 5: 414–426.
Huder J. & Amberg G.1970. Quellung in Mergel, Opalinuston
und Anhydrit. Schweizer, Bauzeit, 83: 975–980.
Noorany I., Frydman S. & Detournay C. 1999. Prediction of
soil slope deformation due to wetting, In Detournay & Hart
(eds), FLAC and Numerical Modeling in Geomechanics:
101–107. Rotterdam: Balkema.
Saïta A., Robert A. & Le Bissonnais H. 1999. A Simplified
Finite Element Approach to Modeling Swelling Effects
in Tunnels. In Alten et al. (eds), Challenges for the 21st
Century: 171–178. Rotterdam: Balkema.
Steiner W. 1993. Swelling Rock in Tunnels: Rock Characterization, Effect of Horizontal Stresses and Construction
Procedures. In Int. J. Rock Mech. Min. Sci. & Geomech.
Abstr. Vol. 30. No. 4: 361–380.
Wittke W. 1999. Stability Analysis for Tunnels. Fundamentals.
Geotechnical Engineering in Research and Practice.
WBI-Print 4. Ed. WBI Prf.Dr.Ing. W. Wittke. Consulting
engineers for Foundation and Construction in Rock Ltd.
Verlag Glückauf GmbH. Essen.
Figure 12. Combined swelling pressure–strain test simulated with FLAC; comparison of strains.
5 CONCLUSIONS
The formulation for the swelling behavior presented
by Wittke (1999) has been reviewed and a calculation
algorithm, based in this formulation, has been implemented in FLAC, via FISH routines. This algorithm
allows the simulation of the swelling behavior with
FLAC code.
The algorithm has been checked against different
swelling tests presented by Wittke (1999), and the
results from the model fit quite well to the results of
the different tests. Therefore, these routines can be used
to simulate the swelling behavior of expansive grounds
in real engineering problems.
Nevertheless, when using these routines to simulate a swelling behavior, the following limitations of
the formulation have to be remembered:
– The direction of the principal stresses does not
change during the swelling process.
62
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-08.qxd 08/11/2003 20:18 PM Page 63
FLAC and Numerical Modeling in Geomechanics, Brummer et al. (eds)
© 2003 Swets & Zeitlinger, Lisse, ISBN 90 5809 581 9
Scenario testing of fluid-flow and deformation during mineralization: from
simple to complex geometries
P.M. Schaubs, A. Ord & G.H. German
CSIRO Exploration and Mining, Bentley, Western Australia, Australia
ABSTRACT: We present the use of FLAC3D in conjunction with Gocad and the CSIRO-developed software
3DMACS to model deformation – fluid processes during mineralization. Simple idealized geological models
containing one planar fault are used to determine the effects of a number of deformation scenarios on volume
strain, pore pressure and resultant fluid flow patterns. Our results show that whether fluid flows up or down the
fault is strongly controlled by the dip of the fault; steep faults cause fluids to flow up the fault, while more shallow faults dilate and draw in fluid from the overlying sedimentary unit as well as the surrounding host rocks.
Geometrically complex models, which more closely resemble the geology surrounding an ore deposit, are
aimed at determining how the shape of a doubly plunging dome affects fluid flow patterns and the location of
sites of dilation. Areas of maximum dilation occur on the flanks of the dome near its crest. Complex meshes are
constructed using Gocad, which is then translated into FLAC3D using 3DMACS. This software may also be used
to set model parameters and properties, and for coupling FLAC3D to other numerical codes.
number of parameters and only require one or two
models. Simple models are aimed at determining
what causes fluid to flow up or down faults and where
areas of high positive volume strain and low fluid
pressure occur. This has implications for the location
of fluid mixing and mineralization if it is assumed
that there are two distinct fluid reservoirs within the
model. The geometrical complex model is concerned
more with the effect of the irregular shape of the geological units on fluid flow patterns and the location of
sites of dilatancy.
1 INTRODUCTION
An understanding of the relationship between fluid
flow and deformation is important for determining how
hydrothermal ore deposits form. Deformation may
lead to the development, or reactivation, of structures
such as faults, fractures and veins which may host ore
deposits or may act as conduits for mineralizing fluids. Deformation may also induce volume changes
(dilatancy) that further affect rock permeability and
pore pressure gradients.
Here we present two methodologies for determining the relative importance of certain parameters
and processes during deformation and mineralization.
The first method involves simplifying the geometry
of the structures involved and is aimed at determining
the effects of various parameters. In this way we are
able to narrow down the effects of one parameter and
reduce the uncertainty caused by geometrically complex models. For this reason the geometry of the model
is rather simple and number of zones in the model is
low (12500). This allows us to run a large number of
models with different parameters in a short period
of time.
The second type of model is aimed at testing the
effects of complex geometry, which more closely
approximates that of the geology we see in the field.
Here we are not concerned with changing a large
2 MODEL BUILDING AND VISUALIZATION
THROUGH THE USE OF ADDITIONAL
SOFTWARE
2.1
63
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
Simple and complex model generation
Simple single fault models are constructed using
FLAC3D “generate” commands. The use of FISH
allows for the rapid construction of models with different fault dips and strikes. Geometrically complex
meshes are constructed using Gocad. This is done
first by building or importing tri-surfaces, which
represent the contacts of the various geologic units.
These surfaces are then used to “distort” the initially
orthogonal and regular Gocad mesh (stratigraphic grid)
09069-08.qxd 08/11/2003 20:18 PM Page 64
Figure 1. Screen shot of web-browser interface of 3DMACS showing how properties and boundary conditions are applied.
– Allows the user to set group properties imported
from an external properties database, which can
then be edited by the user. These properties can be
from any of the 4 domains above.
– Allows the user to set model parameters and choose
visualization outputs.
– Due to its underlying XML character, users can
use a web browser (or the built-in 3DMACS GUI)
from any machine connected to the internet and run
their simulations remotely via 3DMACS. Multiple
processes can be distributed amongst various
machines.
– Allows for the storage of all user parameters and
selected properties within a nominated repository,
so that the user can re-run prior defined problems.
The above functionality allows the simulation to be
fully specified within the user-domain, rather than the
process domain, which normally requires specialized
knowledge of syntax and macro languages such as
FISH. By providing basic problem “templates” for
scenarios such as mechanical/fluid, mechanical/fluid/
thermal and mechanical/fluid/chemical modeling,
so that the zones become parallel to the surfaces. The
CSIRO-developed software 3DMACS (Fig. 1) is then
used to import this model, along with a set of properties, into FLAC3D.
2.2
The 3DMACS software suite
Primarily, 3DMACS is used for the importation,
parameter-selection/editing and running of 3D geological models. It is a suite of software modules that at
its core, leverages an XML data model. It harnesses
various vendor-provided software, such as FLAC3D,
to provide the background simulation capabilities.
Overall, it provides the following functionality:
– Allows for the importation of 3D models such as
those produced by Gocad or FracSIS.
– Can “couple” a simulation across 4 phenomenologically distinct domains: mechanical/deformation,
thermal, fluid and chemical. Currently FLAC3D
and FastFlo (a CSIRO package for partial differential
equation solving) are used to provide modeling
across these domains.
64
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-08.qxd 08/11/2003 20:18 PM Page 65
users without particular expertise in FLAC3D can still
build and run a model. However, expert users can
interact directly with the underlying processes and
override any presets set in the templates.
As 3DMACS has the ability to couple FLAC3D to
other software packages, we are able to create models
which simulate deformation, fluid flow, thermal and
chemical processes, all of which may be important for
mineralization.
2.3
Figure 2. Typical simple fault model. Arrows indicate
applied fluid discharge.
Visualizing results
3DMACS provides for the visualization of FLAC3D
results in Gocad or the commercial software FracSIS,
via the export of scalar and vector data as 3D pointcloud sets. Gocad allows for the creation of isosurfaces from scalar point data. Both Gocad and FracSIS
can be used for volume rendering of scalar data.
FracSIS also allows the user to control the opacity of
certain color values in both scalar and vector data. By
“hiding” certain values we are able to see inside the
FLAC3D model more easily and are not required to
use cross-sections or cut planes.
Using FISH from within FLAC3D, we are also able
to create VTK files of scalar and vector data, which
are used by the freeware software MayaVi. MayaVi is
able to visualize isosurfaces, and scalar and vector cut
planes as well as fluid flow vectors so that their color
varies with magnitude.
All of these software packages are able to create
VRML files which, given the appropriate plug-in,
allows one to use a web-browser to view results.
Figure 3. Examples of initial geometries of simple fault
models.
3 SIMPLE FAULT MODELS
3.1
Model setup, properties and boundary
conditions
In this group of models we present a number of scenarios with a simple geometry. The initial model is
made up of a simple fault region bounded by steeply
dipping hangingwall and footwall rocks. These rocks
are truncated by a horizontal interface and flat-lying
sedimentary unit (Fig. 2). We test different orientations
of far-field stresses, various dip and strike angles, for
the fault and different hanging wall and footwall permeabilities (Fig. 3). The types of deformation applied
include (Fig. 4):
– compression and extension, where the bottom
boundary is fixed and initial velocities are horizontal
and perpendicular to the left and right boundaries,
– strike slip, where initial velocities are horizontal
and parallel to the left and right boundaries but in
opposite directions,
– reverse and normal movement, where initial velocities are parallel to the dip of the fault and the base
Figure 4. Different styles of deformation applied to simple
fault models. a) compression, b) extension, c) dextral strikeslip, d) sinistral strike-slip, e) reverse movement, f) normal
movement, g) transpression, and h) transtension.
65
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-08.qxd 08/11/2003 20:18 PM Page 66
of the model is allowed to move in the vertical direction, and
– transpression and transtension, which are similar
to the reverse and normal models but contain a
strike slip component of movement.
of extension pore pressure is 30 MPa lower than those,
which are essentially compressional. In all models,
contours of pore pressure in the sedimentary unit slope
towards the right due to the application of a fluid flux
(discharge) at the left boundary.
By changing the dip and strike of the fault we have
a number of scenarios which range from a model with
a shallow dipping faults with a dip of 30° and compression at right angles to the strike of the fault to a
model with a steeply dipping fault (60°) where the
compression direction is at 45° to the strike of the fault.
Constant fluid fluxes of 1m/yr are applied at the
base of the fault and the left boundary of the sedimentary unit. Permeability is isotropic and remains
constant during deformation. Mechanical anisotropy
is modeled using the ubiquitous joints constitutive
model. In the sedimentary unit these are oriented horizontally and represent bedding, while in the basement units they are oriented roughly parallel to the
contacts of the units and represent a pervasive cleavage.
These fabrics are given 90% of the strength (cohesion, tensile strength) of the rock type. Mechanical
properties are listed in Table 1. The size of the model
varies depending on the dip of the fault. All models
are 2 km tall (z-direction) and 2 km deep (y-direction)
but the width (x-direction) changes. In all cases the
bottom of the fault is a minimum of 1500 m away
from either boundary. All models are deformed to 5%
shortening or the equivalent amount of displacement
for those models with a strike-slip component.
3.2.2 Volume strain
In all models the fault region is an area of high positive
volume strain (dilation) and a zone of significant dilation propagates from the tip of the fault into the sedimentary (Fig. 5). In the compression, reverse and
transpression models this zone is oriented roughly
parallel to the strike of the fault. In the extension, normal and transtension models this zone is much steeper,
and in the strike-slip models it is close to vertical.
Positive volume strain in the fault is greatest in
models with an extensional component. In the reverse
model only the fault is a region of significant positive
volume strain and therefore is also a region of low
pore pressure relative to the other basement units. The
transpression model is similar; however, it contains
regions of dilation in both the hangingwall and footwall. In the normal and transtension models the fault
is also a region of significant dilation (higher than the
reverse and transpression models). As with volume
strain (dilation/contraction) the fault region records
the highest shear strain in all models. The location
and orientation of the zones of high shear strain are
coincident with those of significant dilation in all
models.
3.2
Results
3.2.1 Pore pressure
Models which have an extensional component of
deformation (extension – pure shear, normal faulting,
transtension) cause the greatest decrease in pore
pressures because they have the greatest dilation
(positive volume strain). The normal and transtension
models also have the steepest pore pressure gradients
and therefore fluid flow rates in the fault are highest in
these models. Pore pressure at the bottom of all models
is similar; however, in the models with a component
Figure 5. Volume strain increment and fluid flow vectors in
compression model (cross-section view through middle of
model). Maximum fluid flow velocities are 2.02 10 8 m/s.
Table 1. Mechanical and fluid flow properties used in simple fault models.
Property
Density
Bulk modulus
Shear modulus
Cohesion
Tensile strength
Friction angle
Dilation angle
Permeability
Units
3
kg/m
Pa
Pa
Pa
Pa
deg
deg
m2
Sandstone
Granite
2400
2.40E
2.60E
2.70E
1.20E
28
4
1.00E
2700
5.0E
3.0E
4.0E
2.0E
30
6
1.01E
10
10
07
06
14
66
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
Fault
10
10
07
07
16
2600
9.5E
9.6E
1.8E
2.8E
15
5
2.02E
Pelitic gneiss
09
09
07
06
15
2600
1.9E
2.0E
3.5E
5.5E
20
5
2.02E
10
10
07
06
15
09069-08.qxd 08/11/2003 20:18 PM Page 67
more because they are oriented at an angle which is
parallel to the direction of maximum compression.
Steeply dipping faults and those oriented normal to
the maximum compression direction are more likely
to contract.
In models where the compression direction is normal to the strike of the fault, the dip of the fault has
little affect on the orientation of the high strain zone,
which propagates into the sedimentary unit. In all
models where the compression direction is normal to
the strike of the fault, this zone of high strain takes on
a dip of 45°. In models where the fault dips 60° and
the hanging and footwall are both pelitic gneiss the
orientation of the high strain zone in the basement is
also 45°. When the footwall rock type is made for
rigid, the high strain zone in the basement is nearly
parallel to the dip of the fault. In models where the
fault dips 30° and the high strain zone and the footwall is more rigid the high strain zone in the basement
is parallel to the fault. This high strain zone becomes
steeper (close to 45°) in the sedimentary unit.
Changing the orientation of the fault with respect
to the model boundaries and direction of compression
results in different orientations for the high strain
zones. In the models where the strike of the fault is oriented at 45° to the maximum compression direction
(and the dip is 60°), close to the fault the high strain
zone is parallel to both the dip and strike of the fault
in both the basement units and the sedimentary unit.
Away from the fault zones, high strain zones form
with a strike normal to the maximum compression
direction and a dip of 45°. When the angle between
the strike of the fault and the maximum compression
direction is increased to 67.5°, the orientation of the
high strain zone in the basement is nearly parallel to
the fault. As this zone propagates into the sedimentary unit its orientation rotates towards a strike which
is normal to the maximum compression direction and
a dip closer to 45°. Therefore, both the strike and dip
of the fault, with respect to the maximum compression direction as well as the strength of the rocks, may
control the orientation of the high volume and shear
strain zones.
In models where the direction of maximum compression is oriented less than 90° to the strike of the
fault, fluid flow vectors change along a line stretching
from the top west end to the bottom east end of the
fault. On the west side flow is directed up and out into
the hanging wall, while on the east side fluid flows
down and into the footwall side of the fault.
Increasing the permeability of the fault marginally
does not change the values of volume strain or pore
pressure in a significant manner. Fluid flow patterns
remain the same however fluid flow velocities are
increased slightly.
Decreasing the strength of bedding and cleavage
fabrics from 90 to 75% of the strength of the host
3.2.3 Fluid flow vectors
Fluid flows towards the center of the fault in the compression, reverse and transpression models (Fig. 6).
This is a result of the fault being an area of significant
dilation, and low fluid pressure, relative to the surrounding rocks. In the extension, normal and transtension models, fluid flows up and out of the fault into
the hanging wall. This occurs despite the fault being
an area of higher positive volume strain (dilation)
than the surrounding rocks. Fluid flows up because
pore pressure gradients are much steeper than in the
compressional models. In the strike-slip models fluid
flows up and parallel to the boundaries of the fault. In
the extension, normal and transtension models fluid
on the right side of the sedimentary unit flows to the
right towards the zone of significant dilation which
propagates from the tip of the fault.
3.2.4 Dip and strike of fault
The dip angle of the fault strongly controls whether
fluid flows up and parallel to the fault boundaries.
Models with the fault dipping 60° allow fluid to flow
up the fault. Fluid will flow up a steep fault whether
the footwall rocks are quartzite or pelitic gneiss.
Similarly when the fault dips 45°, fluid flows into the
fault from the foot and hanging walls whether the
footwall rocks are quartzite or pelitic gneiss. In models where the fault is steep (60°), the fault does not
dilate as much and therefore pore pressure does not
decrease in the fault as much as it does in models
where the fault has a shallower angle. Decreasing the
dip angle of the fault to 30° causes the fault to dilate
more than models where the fault dips at 45°. This
however does not significantly affect the pore pressure
values in the fault and fluid still flows towards the
center of the fault from the hanging and footwalls.
Moderate to shallowly dipping faults are able to dilate
Figure 6. Fluid flow vectors in and around the fault
(compression model).
67
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-08.qxd 08/11/2003 20:19 PM Page 68
rocks has little effect on the fluid flow patterns. In the
model where the joint strength is 90% of the host rocks
strength, slip along bedding planes occurs within the
sedimentary unit above the fault and may indicate that
some flexural slip has occurred. In the model where
joint strength is 75% of the host rocks strength, slip
also occurs along bedding planes in the sedimentary
unit as well as along cleavage planes within the fault.
4 COMPLEX GEOMETRIES
4.1
Model setup, properties and boundary
conditions
The geometry of the model is reasonably complex
(Fig. 7) and contacts between different units are
smooth curved surfaces. The objective of this model
is to determine what affect the shape of a basalt dome
has on fluid flow patterns and the position of regions
of dilation in relationship to the formation of gold
deposits. The model is made up of rigid doubly plunging basalt dome which is blanketed by a thin weak
altered metasedimentary unit and surrounded by a
moderately stiff metamorphic rocks (Fig. 8). Mechanical properties are listed in Table 2. Deformation is
applied so as to simulate horizontal compression perpendicular to the long axis of the dome.
4.2
Figure 7. Outline of basalt unit in geometrically complex
model (in FLAC3D).
Results
The altered metasedimentary unit contains regions of
negative volume strain (contraction) on the flanks of
the basalt dome where the dip is steep and at a high
angle to the compression direction. Towards the top
of the dome (but not at the crest) the weak altered
metasedimentary unit contains regions of high positive volume strain (dilation) above the areas of contraction (Fig. 9).
This causes fluid flow rates to be highest close to
the top of the dome where areas of contraction and
maximum dilation are in close proximity (Figs. 10 &
11). Contraction occurs within the matrix above the
highest point of the dome. Regions of high positive
volume strain are also regions that have failed in
tension. These areas are more likely to have formed
quartz veins, which commonly host gold.
5 CONCLUSIONS
Figure 8. Cross-section through center of model showing
outline of the main basalt dome in light grey, the thin altered
metasedimentary unit in dark grey and the surrounding
metamorphic matrix in white.
FLAC3D has been used to test the effects of fault and
far-field stress orientation and the shape of irregularly
shaped bodies on fluid flow in regions of mineralization. In geometrically simple models with a single planar fault the results of the models show that a low
angle fault with permeability similar to the surrounding
host rocks causes the fault to dilate and fluid to flow
down from the sandstones into the fault. Steeply oriented faults, strike-slip deformation and high permeability faults cause fluid to flow up the fault. This
has implications for the location of fluid mixing and
68
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-08.qxd 08/11/2003 20:19 PM Page 69
Table 2. Mechanical and fluid flow properties used in geometrically complex model.
Property
Units
Basalt
Density
Bulk modulus
Shear modulus
Cohesion
Tensile strength
Friction angle
Dilation angle
Permeability
kg/m3
Pa
Pa
Pa
Pa
deg
deg
m2
2700
5.00E
3.00E
4.00E
2.00E
30
2
1.00E
Matrix
10
10
07
07
16
2700
4.0E
2.0E
3.0E
1.0E
25
3
1.00E
Altered unit
10
10
07
07
15
2700
3.0E
1.0E
2.0E
9.0E
20
3
5.00E
10
10
07
06
15
Figure 9. Isosurface of high positive volume strain (black)
occurs on flanks of the basalt within the weak altered
metasedimentary unit. Surface of basalt exported from
Gocad is shown in grey. Visualized in MayaVi.
Figure 11. Cut plane of fluid flow vectors through highest
portion of the basalt dome. Surface of basalt is shown in
grey. Visualized in MayaVi.
mineralization, if it is assumed that the horizontal
interface represents a boundary between two distinct
fluid reservoirs.
In the geometrically complex model of a basalt
dome, the area of maximum dilation occurs on the
flanks of the dome near its crest. Areas of maximum
positive volume strain are coincident with maximum
fluid flow velocities and occur within the weak altered
metasedimentary unit which blankets the dome. Sites
Figure 10. Fluid flow vectors as visualized in FracSIS.
Vectors are shaded using greyscale where black is highest
and white is lowest fluid velocity. Only the highest values
are shown (others remain transparent). The highest values
are coincident with areas of high positive volume strain on
flanks of the basalt within the weak altered metasedimentary
unit. Surface of basalt is shown in grey.
69
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-08.qxd 08/11/2003 20:19 PM Page 70
ACKNOWLEDGEMENTS
of high volume strain or dilation are likely sites of
quartz vein formation and gold mineralization.
GoCAD has been used to construct models of
significant geometrical complexity and the CSIROdeveloped software 3DMACS has been used to translate the resultant mesh to FLAC3D. Numerical modeling results are visualized in either Gocad, MayaVi or
FracSIS any of which allow for the creation of isosurfaces of scalar data and the export of VRML files.
We would like to thank Irvine Annesley, Michel
Cuney, Jon Dugdale, Nick Fox, Peter Hornby,
Catherine Madore, Phillipe Portella, Dave Quirt, Tim
Rawling, Dave Thomas, Chris Wilson and Rob
Woodcock for their advice and input into the models
presented here and with help visualizing the results.
70
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-09.qxd 08/11/2003 20:19 PM Page 71
FLAC and Numerical Modeling in Geomechanics, Brummer et al. (eds)
© 2003 Swets & Zeitlinger, Lisse, ISBN 90 5809 581 9
Constitutive models for rock mass: numerical implementation,
verification and validation
M. Souley
INERIS, Ecole de Mines de Nancy, Nancy Cedex, France
K. Su
ANDRA, Châtenay-Malabry, France
M. Ghoreychi
INERIS, Parc Technologique ALATA, Verneuil-en-Halatte, France
G. Armand
ANDRA, Laboratoire de Recherche Souterrain Meuse/Haute-Marne, Bure, France
ABSTRACT: This paper deals with numerical implementation of non-linear constitutive models of rock mass
and its verifications and validations. In the 3-dimensionnal code, FLAC3D, an elasto-damage-plastic model
(damage is approached through the theory of plasticity) for Hoek-Brown media has been implemented.
Simulations of triaxial compression tests provide a verification of the numerical implementation with a good
agreement between predictions and theoretical values of peak and residual strengths. The applicability of the
implemented model to predict the damage and/or failure development around a circular opening is checked.
Finally a validation of poroplastic calculations based on the drainage of a cylindrical hole in poroplastic media
is achieved by comparison to an existing semi-analytical solution.
progressive damage as microcracks initiate and grow
at small scale and coalesce to form large-scale fractures
and faults. The involved mechanisms include sliding
along pre-existing cracks and grain boundaries, pore
collapse, elastic mismatch between mineral grains,
dislocation movement, etc.
In the model considered in this study, the initiation
and growth of cracks as well as failure and the postpeak behavior are approached through the theory of
plasticity. Furthermore, the transition between the
brittle failure and the ductile behavior depending on the
mean stress is generally observed on rock samples.
The purpose of this paper is to present: (a) a numerical implementation of an elasto-damage–plastic model
obeying to the Hoek-Brown criterion and taking into
account the brittle/ductile transition, (b) the corresponding verification based on simulation of triaxial
compression tests and the prediction of the extent of
damaged/failed zone around a hypothetical circular
opening, (c) validation of poroplastic calculations based
on a variant of the previous implemented model and
an existing semi-analytical solution.
1 INTRODUCTION
Analysis of stresses and displacements around underground openings in rock mass is required in a wide
variety of civil and geotechnical, petroleum and mining engineering problems such as tunnels, boreholes,
shafts, disposal of radioactive waste and mines. In
addition, an excavation damaged zone (EDZ) is generally formed around underground openings excavated in rocks in relation to high in situ stresses and/or
high anisotropic stress ratios even without blasting.
The mechanical and hydraulic properties are then
changed within EDZ. The failure mechanism in the
damaged zone is the initiation and growth of cracks
and fractures, and is directly related to the constitutive behavior of the rock mass. Several experimental
studies on rocks have shown that there are many different mechanisms through which cracks can be initiated and grown under compressive stresses (Wong
1982, Steif 1984, Martin & Chandler 1994, etc.).
Indeed, irreversible deformations and failure of rocks
subjected to compressive stresses occur through
71
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-09.qxd 08/11/2003 20:19 PM Page 72
For instance, the initiation of damage (Fsend), the
peak (Fsrup) and residual (Fsres) strengths are given by:
2 MECHANCICAL SHORT TERM BEHAVIOR
2.1
Brief mathematical description
Based on several triaxial laboratory tests performed
on the argillite rock samples, the typical characteristics of stress–strain curves are displayed in Figure 1:
Phase 1: linear isotropic and elastic behavior after
a short non-linear phase corresponding to the closure
of microcracks;
Phase 2: strain-hardening in the pre-peak region
corresponding to the initiation and the growth of
microcracks assumed to be described by plasticity,
contrary to the concept of effective stress and the
hypothesis of strain equivalence (Lemaitre 1995, Ju
1989) that is generally used;
Phase 3: softening after the peak (failure) associated
with a progressive loss in material cohesion and then a
decrease in strength;
Phase 4: residual phase where the rock strength
remains practically constant.
Based on these observations, a constitutive model
for this material was firstly developed in the framework
of the European project: EURATOM MODEX-REP
and recently compiled by Su (2003).
The features of this model are:
(1)
where mend, send and mrup, srup are Hoek-Brown constants respectively corresponding to onset of damage
and the peak; cend and crup are uniaxial compressive
strength at the onset of damage and peak; uniaxial
residual strength; 3b d confining pressure for
brittle/ductile transition; 1 and 3 major and minor
principal stresses (compressive stress is negative and
1 2 3).
2.2
(a) linear elasticity to model the Phase 1;
(b) damage initiation and growth are approached by a
strain-hardening based on Hoek-Brown criterion
where the Hoek-Brown constants and the uniaxial
compressive strength are plastic strain dependent;
(c) the peak, post-peak (Phase 3) and residual (Phase
4) are also based on Hoek-Brown criterion with
respect to brittle/ductile transition in accordance
with the experimental data.
1
2
3
(2)
where softening flow function (parabolic form
with respect to the internal plastic variable, in phase
3, and null elsewhere); m, s Hoek-Brown constants
(linearly varying with in phase 2, and constants
in phase 3 and 4); c uniaxial compressive strength
(linearly varying with in phase 2, and constant in
phase 3 and 4).
It is assumed that the material damage (hardening)
and failure (up to the peak) depend on the generalized
plastic strain, :
4
Peak
Deviatoric stress (σ1-σ3)
Constitutive equations
In order to obtain a simple but general constitutive
model, an extended Hoek-Brown yield function is used.
The general form of the yield function is expressed in
the following equation:
Onset of damage
Residual
(3)
p
where d
increment of total damage/plastic strain
tensor in phases 2, 3 and 4.
For simplicity, an associated flow rule is used (the
plastic potential is identical to the yield function given
in Equation 2). In addition, in order to take into account
the geometry of stresses (compression differing to
extension), the previous yield function is generalized
Axial strain( ε1)
Figure 1. A typical stress–strain curve provided by a triaxial
test.
72
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-09.qxd 08/11/2003 20:19 PM Page 73
By substituting Equations (4), (7) and (5) in Equation
(8), we can express the plastic multiplier:
in terms of the three stress invariants (J1, J2 , J3 ).
Then, principal stresses are expressed in terms of mean
stress (p), generalized deviatoric stress (q) and Lode’s
angle () according to:
(9)
(4a)
and then, the elasto-damage-plastic behavior:
where
(10)
2.3
(4b)
Numerical implementation
In the three-dimensional explicit finite-difference code,
FLAC3D, we have implemented the elasto-damageplastic model described above. The main procedure is
summarized below.
– The first approximation of stress tensor I, is evaluated by adding to the previous stress tensor the
stress increments computed from the total strain
increments and the Hooke’s law.
– Computation of the corresponding mean stress pI,
deviatoric stress qI and Lode’s angle I corresponding to I.
– Compute the generalized yield function, Fs(pI, qI,
I
I). If I verifies the yield function (Fs(
) 0),
the derivatives of Fs with respect to and of m, s
and c (phase 2) or (phase 3) with respect to ,
are evaluated, and then Equation 10 is used to
compute the current increment of stress tensor.
– Current stress tensor, generalized plastic strain and
flow functions are updated. It should be noted that,
in FLAC3D, zones are internally discretized into
tetrahedra and the current flow functions (damage/
plastic) and, stress and strain tensors for each zone
are evaluated as a volumetric average for the zone.
stress tensor.
Assuming that only small strain occurred, the total
strain increment, d
, can be subdivided in elastic part,
e
p
d
and
damage/plastic
part, d
:
(4c)
(5)
where plastic multiplier. This leads to:
(6)
This routine has been written in C
and compiled
as DLL file (dynamic link library) that can be loaded
whenever it is needed.
The incremental expression of Hooke’s laws in terms
of generalized stress and strain tensors has the form:
(7)
2.4
In order to verify the implemented model, seven triaxial
compression tests with confining pressures of 2, 5,
10, 12, 16, 20 and 25 MPa have been simulated. They
are the part of the wide number of triaxial compression
tests used to characterize the non-linear behavior of
the studied materials.
where C isotropic linear tensor.
The consistency condition, dFs() 0 leads to:
(8)
73
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
Verification and validation
09069-09.qxd 08/11/2003 20:19 PM Page 74
Table 1. Values of input parameters.
send
cend (MPa)
mrup
srup
crup (MPa)
3b
1
0.9
15
0.43
2.5
33.5
20.01
20 MPa
16 MPa
12 MPa
Lateral strain [-]
-0.02
Residual
mend
25 MPa
-0.03
Peak
-0.01
55
50
45
40
35
30
25
20
15
10
5
0
(MPa)
d
3
80
70
Principal major 1
(MPa)
Deviatoric stress 13(MPa)
Onset of damage
10 MPa
5 MPa
2 MPa
0.01
0.02
0.03
-10
40
30
20
Principal minor stress 3 (MPa)
0
10
20
30
Peak [Eq. 1]
Residual [Eq. 1]
Onset of damage [Eq. 1]
Peak - Flac3d
Residual - Flac3d
Onset of damage - Flac3d
Figure 2. Numerical result of triaxial compression tests.
The input parameters needed are derived from
standard laboratory tests and based on the identification
of model parameters. These parameters are summarized
in Table 1. The isotropic elastic characteristics used
are E 4500 MPa and 0.3. The generalized peak
and residual plastic strain were also identified from
triaxial laboratory tests. These are: rup 0.0063 and
res 0.0175.
FLAC3D simulations are carried out on a single
zone of unit dimensions: fixed normal displacements
are applied to 3 perpendicular planes (bottom and two
perpendicular vertical faces). First, the three other
faces of model are subjected to an isotropic stress state
corresponding to the given confining pressure.
Secondly, the deviatoric stress is exerted by applying
a constant displacement rate at the top of model.
Figure 2 presents the deviatoric stress–axial and lateral strain curves for different confining pressure. From
this figure, we note that the post-peak behavior is confining pressure dependent: the transition stress between
brittle failure and ductile behavior is clearly marked
and the numerical transition stress, b3, d is approximately about 20 MPa. These curves are qualitatively
similar to the experimental ones (not reported herein).
Figure 3 shows a comparison in terms of the damage
threshold, the peak and residual strengths between the
predictions (corresponding values in Fig. 2) and theory
(Eq. 1).
The match is very good as may be seen in this figure, where numerical and analytical solutions coincide.
More precisely, the relative error for peak and residual
strengths is less than 0.3%, and 0.9% for the onset of
damage (dependent on the magnitude of loading at
Figure 3. Onset of damage, peak and residual strengths:
numerical and analytical solutions.
the beginning of phase 2). This validates the numerical
implementation of the elasto-damage-plastic model
in FLAC3D.
2.5
Application to a circular opening
The aim of this section is to provide a verification of
the implementation for non-triaxial stress paths and to
show numerically the ability of the implemented
model to evaluate the extent of damaged and/or failed
zones around a circular underground excavation.
We then consider an infinite circular opening in an
infinite elasto-damage-plastic medium initially subjected to an anisotropic initial stress in order to maximize the deviatoric stress and then, the risk of damage
and/or failure. The axis of gallery is parallel to the
horizontal minor stress leading to a maximum deviatoric stress in the gallery section.
The 2D-plane strain geometry as well as the initial
in situ stresses and model geometry including a circular gallery are plotted in Figure 4. The modeling
sequence was performed as follows:
(1) the model without excavation was consolidated
under the previous in situ stresses, and
(2) the circular excavation was carried out using
roller boundaries to the model sides respectively
parallel to x- and z-axis for seeking symmetry.
74
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
50
10
0
Axial strain [-]
0
60
09069-09.qxd 08/11/2003 20:19 PM Page 75
v
v
radius of gallery: 3 m
model length : 30 m
model heigth : 30 m
model thickness : 1 m
gallery axis : // à h(// à Oy)
v= h= 10.8 MPa
H= 15.1 MPa
0
-2 0
-4
-6
-8
-10
-12
-14
-16
-18
-20
v
H
H
2
4
6
8
0
Figure 4. Model geometry, initial stress state and boundary
conditions.
10
axial
orthoradial
(a)
Stresses (MPa)
0
-5
r*
radial
2
4
6
8
r*
10
radial
-10
-15
axial
-20
-25
-30
-35
orthoradial
Stresses (MPa)
(b)
Figure 6. Radial, orthoradial and axial stresses along
radial lines (a) at 4.5° (b) at 85.5° (elastic lines; elastoplastic circles).
Damaged
Failed
to damage models based on the concept of effective
stress and assuming the strain equivalence (Shao et al.
1998, Souley et al. 1998, Homand et al. 1998, Souley
et al. 1999, etc.).
Figure 6 shows the profiles of radial, orthoradial
and axial stresses along two radial lines at 4.5° and
85.5° with respect to x-axis as a function of the adimensional radial distance (r* r/a; where r radial
distance and a gallery radius). In addition, the corresponding stresses for elastic calculations are also plotted. From the profile of orthoradial and axial stresses,
one can distinguish three different regions (elastic,
damaged and failed) through the slopes of curves.
At 4.5°, only one loss of slope can be noticed
along the profile of orthoradial stress: the correponding radial distance (approximately 3.2 m) is in accordance with the previous investigation of damage extent.
Up to this radial distance, the orthoradial stress profile is qualitatively similar to the elastic ones.
At 85.5°, the first failure of curve slopes is
noted at a radial distance of 3.3 m from the gallery wall,
as well as for orthoradial stress profile (major principal
stress) than axial stress (intermediate principal stress).
This radial distance corresponds to the extent of failed
zones in the direction of initial principal minor stress.
The second failure of orthoradial and axial stress slopes
can be shown at a radial distance of 1.5 m from the
gallery wall. This corresponds to the damaged region
located between the failed zone and the elastic zone.
Figure 5. Extent of damaged and failed zones around circular opening.
Figure 5 shows the extent of damaged and failed
zones around the circular opening. Damaged zones
correspond to the set of elements where the behavior
is associated within the pre-peak region; the peak
strength is not yet reached. Failed zones correspond
to the model region where the peak strength was
reached: it should be noted that, in the direction of the
initial major principal stress (Ox), the extent of damage
is about 17 cm: the radius of damaged zone in this
direction is 1.06 times greater than the gallery radius.
The extent of failed areas is concentrated in the
compressive region where the maximum deviatoric
stress is located. Then, in the direction of the initial
minor principal stress (Oz), the maximum extent of
failed zone reaches 26 cm, whereas the damaged areas
are ranged between the failed and elastic regions with
an extension about 1.5 m.
Finally, in the case of a circular opening created in
an infinite elasto-damage-plastic medium initially
subjected to an anisotropic initial stress, the damaged
zone has an elliptical form (big axis is parallel to the
direction of the initial minor principal stress) similarly
75
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-09.qxd 08/11/2003 20:19 PM Page 76
Deviatoric stress 13(MPa)
3 HYDROMECHANICAL VALIDATION
Generally, validation of poroelastic calculations with
FLAC3D for which the formulation of hydromechanical
coupling is used within the framework of the quasistatic Biot theory, has been undertaken by several
examples and studies:
– one-dimensional filling of an initially dry porous
media compared with the analytical solution developed by Voller et al. (1996);
– one-dimensional consolidation compared with the
analytical solution developed by Detournay &
Cheng (1993);
– two-dimensional consolidation of a borehole in an
elastic medium compared with the analytical solution developed by Detournay & Cheng (1988).
-0.03
3 = 20 MPa
3 = 15 MPa
20
3 = 10 MPa
15
3 = 5 MPa
10
3 = 1 MPa
5
Lateral strain [-]
-0.02
-0.01
3 = 0.5 MPa
Axial strain [-]
0
0
0.01
0.02
0.03
where c uniaxial compressive effective strength
of the intact rock; m peak value of Hoek-Brown
constant; residual strength parameter.
For softening phase, the yield function is assumed
to be:
(13)
where softening internal variable, representing
the opposite value of the plastic strain 1p associated
with the major principal stress 1; R (0 R) value of the softening internal variable for
which residual phase is reached.
Finally, the potential function is given by:
(14)
Brief mathematical description of mechanical
model
This formulation slightly differs from the elastodamage-plastic model detailed in section 2 by the
absence of hardening in the pre-peak region and brittle/ductile transition. Based on the previous implementation, this variant of the elasto-damage-plastic
model is implemented in FLAC3D. As verification, triaxial com-pression tests were simulated. The results
are shown in Figure 7. In addition, the corresponding
numerical residual and peak strengths are represented
in Figure 8 and compared with the analytical expressions (Eq. 12 & 13). From Figure 7, it should be noted
that for a given level of confining pressure, the three
phases (elastic before failure, softening for post-peak
behavior and perfect plastic for residual behavior) are
clearly distinguished.
The match is very good as may be seen in Figure 8,
where numerical and analytical solutions coincide.
The relative error for strengths is less than 0.5%.
The mechanical behavior is described by an elastoplastic model with a post failure softening phase. The
model is based on the Hoek-Brown criterion with
associated plastic potential. The main characteristics
of this model are: (a) linear and isotropic behavior in
the pre-peak region; (b) peak strength governed by the
Hoek-Brown criterion; (c) a softening phase based on a
Hoek-Brown yield function and an associated flow rule;
(d) a perfectly plastic behavior in the residual phase.
Assuming that compressive stress is negative and
1 2 3, the peak strength and residual strength
are given by:
(11)
3.2
Definition of hydromechanical problem
Problem definition consists of a cylindrical hole created in an infinite poroelastoplastic medium initially
(12)
76
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
25
30
Figure 7. Verification – simulated triaxial compression tests.
Validation of hydromechanical coupling in the
framework of poroplasticity is specific to each nonlinear model and each numerical code. The aim of this
section is to provide an example of validation of poroplastic calculations in Hoek-Brown media. This example concerns the drainage of an infinite medium by a
cylindrical hole for which a semi-analytical solution is
developed by Vouille et al. (2001). In this solution, the
mechanical model is based on the Hoek-Brown yield
function and can be viewed as an extension of
Carranza-Torres and Fairhust works and, also a particular case of the previously described constitutive model
in the sense that neither damage (hardening in pre-peak
region) nor brittle/ductile transition are considered.
3.1
35
Major principal stress 1
(MPa)
09069-09.qxd 08/11/2003 20:19 PM Page 77
60
Table 2. Initial and boundary conditions of the 1D problem.
50
Initial conditions
Total stresses (MPa)
Pore pressure (MPa)
Boundary conditions
Normal displacement (P9; PY; PZ0; PZ1)
Hydraulic flux (P9; PY; PZ0; PZ1)
Radial total stress at the outer radius r30 (MPa)
Pore pressure at the outer radius r30 (MPa)
Radial total stress at the inner radius
Pore pressure at the inner radius
40
Peak [Eq. 11]
30
Residual [Eq. 12]
20
Peak - Flac3d
Residual - Flac3d
10
Minor principal stress 3 (MPa)
0
-10
-5
0
5
10
15
20
25
30
11.5 ij
4.7
null
null
11.5
4.7
Eq. 15
Eq. 16
Figure 8. Peak and residual strengths: numerical and analytical solutions.
Table 3. Hydromechanical properties used in poroplasticity validation.
r30
9º
3m
5800
0
0.3
c (MPa)
14.8
m
2.62
h (m/s)
10 12
b
0.8
M (MPa)
6000
w (kN/m3)
10
E0 (MPa)
P9
R
0.015
0.01
PY
30 m
and pore pressure p, along the inner wall are expressed
as follows:
PZ1
r3
0,1 m
Figure 9.
PZ0
(15)
FLAC3D geometry of the 1D problem.
(16)
subjected to a uniform and isotropic stress state and a
uniform pore pressure. The induced mechanical and
hydraulic perturbations are examined during and after
excavating. The main assumptions are:
where t time; T 1.5 106 s represents the excavation duration.
A semi-analytical solution of this H-M 1D problem
has been developed in the framework of the European
project: EURATOM MODEX-REP (Su 2002).
Finally, the geometry shown in Figure 9, initial and
boundary conditions reported in Table 2 are used in
our FLAC3D model. Hydromechanical properties are
shown in Table 3, where E0 and 0 denote the drained
elastic properties; h is the hydraulic conductivity;
b the Biot coefficient; M the Biot modulus and w
the specific weight of water.
For both semi-analytical and numerical solutions
the required results are:
– gravity forces are neglected;
– mechanically, the medium behaves as an isotropic
and elastoplastic material according to the model
described in §3.1;
– hydromechanical coupling process is expressed by
Biot’s theory;
– hydraulic and mechanical boundary conditions at the
hole walls are time-dependent: continuous reduction of normal stress and pore pressure at the hole
boundaries from their initial values to zero.
The geometry of this 1D problem is shown in
Figure 9. It consists of a thick wall cylinder with
internal radius of 3 m and external radius of 30 m. The
initial and boundary conditions are summarized in
Table 2.
As previously mentioned, the hydraulic and mechanical boundary conditions along the inner wall are timedependent. More precisely, the total radial stress r
– the radial displacement;
– the pore pressure;
– the radial; orthoradial and axial effective stresses.
as a function of radial distance from the hole center
(r ranged from 3 to 30 m) and time (ranged from 0
to 100 Ms) in this paper.
77
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-09.qxd 08/11/2003 20:19 PM Page 78
to negative pore pressure) are well reproduced by
numerical results for radial distance and time ranged
respectively from 3.05 to 3.2 m, and from 1.5 to
1.6 Ms (corresponding to the start of full drainage).
Due to null and negligible values of pore pressure
in the vicinity of the inner radius; relative errors
between semi-analytical and numerical solutions are
not evaluated for radial distance inferior to 3.7 m; so
the difference in results of pore pressure does not
exceed 0.02 MPa. For radial distance superior to 3.7,
the maximum relative error between semi-analytical
and numerical solutions is about 1.2%.
Comparison of radial and orthoradial effective
stresses between the semi-analytical and numerical
solutions is plotted in Figures 12 & 13. It should be
noted that the profiles of principal effective stresses
are qualitatively returned.
From a quantitative point of view and for a radial
distance superior to 3.1 m; the absolute error on the
Height radial distances are considered for output.
They are: 3, 3.05, 3.1, 3.2, 3.5, 3.7, 5, and 10 m. Ten
time periods are also considered for result output. The
involved times are: 1.2, 1.5, 1.6, 2.5, 10, 50, and
100 Ms (million of seconds).
In the case of the semi-analytical, all of these
required results are given at the previous radial
distances. Because of displacements and pore pressure are gridpoint variables whereas stresses are zone
variables and evaluated at the zone centroid, numerical
solutions are checked at the following set of radial
distances:
– 3, 3.05, 3.1, 3.2, 3.5, 3.7, 5, and 10 m for radial displacement and pore pressure;
– 3.0125, 3.0625, 3.1125, 3.2125, 3.5625, 3.725,
5.05, and 10.05 m (centroid of the closest zone) for
stresses.
Therefore, small differences in the results of stresses
compared to the semi-analytical solution are to be
expected.
Comparison with the semi-analytical solution
4
Pore pressure (MPa)
3.3
Figure 10 presents a comparison of normal displacement between the semi-analytical solution and the
numerical ones. This shows a very good agreement
between both the solutions. In particular, the maximum
of relative error between semi-analytical solution and
FLAC3D results is about 0.7% and corresponds to
radial distance inferior to 3.2 m and t 5 Ms. In the
other cases, the relative error is about 0.2%.
Figure 11 illustrates the comparison of pore pressure
between the semi-analytical solution and the numerical
ones. For a given radial distance, both numerical and
semi-analytical solutions are quantitatively and qualitatively similar. In particular, it should be noted that some
underpressures (i.e. “unsaturated” zones corresponding
-2
-3
-4
-5
-6
-7
-8
-9
-10
2
1
0
0
40
20
r=3 - Anal
20
r=3,05 - Anal
r=3,1 - Anal
r=3,2 - Anal
r=3,55 - Anal
r=3,7 - Anal
r=5 - Anal
r=10 - Anal
r=3 - Flac3D
r=3,05 - Flac3D
r=3,1 - Flac3D
r=3,2 - Flac3D
r=3,55 - Flac3D
r=3,7 - Flac3D
r=5 - Flac3D
r=10 - Flac3D
100
-2
-4
-6
-8
-10
Figure 10. Numerical and semi-analytical solutions: radial
displacement.
60
80
100
Time (Ms)
0
20
40
60
80
100
r=3 - Anal
r=3,05 - Anal
r=3,1 - Anal
r=3,2 - Anal
r=3,55 - Anal
r=3,7 - Anal
r=5 - Anal
r=10 - Anal
r=3,013 - Flac3D
r=3,063 - Flac3D
r=3,113 - Flac3D
r=3,213 - Flac3D
r=3,563 - Flac3D
r=3,725 - Flac3D
r=5,05 - Flac3D
r=10,05 - Flac3D
Figure 12. Numerical and semi-analytical solutions: radial
effective stress.
78
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
40
Figure 11. Numerical and semi-analytical solutions: pore
pressure.
0
20
20
-1
Radial effective stress (MPa)
Radial displacement (mm)
-1 0
3
Time (Ms)
0
r=3 - Anal
r=3,05 - Anal
r=3,1 - Anal
r=3,2 - Anal
r=3,55 - Anal
r=3,7 - Anal
r=5 - Anal
r=10 - Anal
r=3 - Flac3D
r=3,05 - Flac3D
r=3,1 - Flac3D
r=3,2 - Flac3D
r=3,55 - Flac3D
r=3,7 - Flac3D
r=5 - Flac3D
r=10 - Flac3D
5
09069-09.qxd 08/11/2003 20:19 PM Page 79
Orthoradial effective stress (MPa)
-8
0
20
40
60
80
– The plastic radius rp for the semi-analytical solution
is about 3.55 m whereas rp equals 3.7 in numerical
model. However, for numerical solution the orthoradial and radial plastic strain are respectively 5
and 12 , and reached at the beginning of full
drainage (t 1.5 Ms). Note that similarly to the
stress tensor, strain tensor and principal plastic
strains are zone variable.
– For radial distance ranged between the hole wall
and the elastic/plastic transition region, the maximum relative error between the semi-analytical
and numerical solution is about 8%.
100
r=3 - Anal
r=3,05 - Anal
r=3,1 - Anal
r=3,2 - Anal
r=3,55 - Anal
r=3,7 - Anal
r=5 - Anal
r=10 - Anal
r=3 - Flac3D
r=3,05 - Flac3D
r=3,1 - Flac3D
r=3,2 - Flac3D
r=3,55 - Flac3D
r=3,7 - Flac3D
r=5 - Flac3D
r=10 - Flac3D
-10
-12
-14
-16
-18
-20
Time (Ms)
4 CONCLUSION
Figure 13. Numerical and semi-analytical solutions:
orthoradial effective stress.
This paper presents numerical implementation of
non-linear constitutive model of rock mass in the
three-dimensional code FLAC3D, as well as its verification and validation. Firstly, a non-linear elastodamage-plastic model based on the Hoek-Brown
failure criterion and for which hardening in pre-peak
(characterizing the material damage), softening (characterizing the post-peak behavior and the failure of
sample) is implemented in FLAC3D.
Simulation of triaxial compression tests at different level of confining pressure provides a verification
of the implemented model. The resulting curves display four regions (elastic, damage in pre-peak, softening in post-peak and residual phase) when the confining
pressure is below the transition stress, and three regions
(elastic, damage and perfect plastic phase) under high
confining pressure. In addition, the onset of damage
(limit between elastic/damage region), the peak and
residual strengths derived from these simulations are
compared with the theoretical envelops: the corresponding relative error does not exceed 0.3%.
The ability of the implemented model to predict
the damaged and failed regions around an underground
excavation is successfully tested. In this verification,
a circular and an initial anisotropic stress (in order to
maximize the extent of damage and failure) are considered. The extent of failed areas is concentrated at
the gallery wall in the compressive region where the
maximum deviatoric stress is prescribed (direction of
the initial minor principal stress), whereas the damaged
areas are ranged between the failed and the elastic
regions. As a result, the damaged zone has an elliptical
form similarly to the prediction of damage models based
on the concept of effective stress (damage theory).
Secondly, a variant of the elasto-damage-plastic
model, for which a semi-analytical solution of drainage
of an infinite medium by a cylindrical hole exists, is
used in order to validate the poroplastic calculations
in FLAC3D. The previous implementation has been
slightly modified for the variant version, and firstly
tested on triaxial compression tests with a good
orthoradial and radial is respectively about 0.3 and
0.2 MPa; that corresponds to a relative error of 2%.
However in the vicinity of the inner wall (3 m for the
semi-analytical solution and 3.0125 m in FLAC3D), the
maximum difference between both solutions is 0.6 MPa.
In order to capture the magnitude of error in terms
of stresses due to the difference in the radial distances
where the principal effective stresses were computed
respectively for semi-analytical and numerical solutions, the closed-form solution for prediction displacements and stresses around circular openings in
elasto-brittle-plastic rock (based on Hoek-Brown criterion) recently developed by Sharan (2003) is used.
This closed-form solution is only valid for the mechanical configuration.
For Sharan closed-form solution, the previous hole
geometry, mechanical properties, mechanical initial
and boundary conditions are used. In addition, it was
assumed that the 3 m-radius hole is instantaneously
excavated. Under these conditions, the orthoradial and
radial stresses are calculated based on the closed-form
solution for these pairs of radial distances (in meters):
3–3.0125, 3.05–3.0625, 3.1–3.1125, 3.2–3.2125, 3.5–
3.5625, 3.7–3.725, 5–5.05 and 10–10.05. The maximum of difference for each pair is about 0.2 MPa.
In relation to the previous discussion on the radial
and orthoradial effective stresses, we can say that the
difference between the semi-analytical and numerical
solutions for radial distance superior to 3.1 m remains
in an acceptable order of magnitude while in the
vicinity of the inner radius, numerical results derived
from FLAC3D can be ameliorated by increasing the
mesh density (unfortunately, this will considerably
decrease the FLAC3D hydraulic characteristic time, and
then increase the calculations duration).
Finally, the investigation of orthoradial and radial
plastic strains (not reported herein) between the semianalytical and numerical solutions leads to the following comments.
79
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-09.qxd 08/11/2003 20:19 PM Page 80
Martin, C.D. & Chandler, N.A. 1994. The progressive failure of Lac du Bonnet granite. International Journal of
Rocks Mechanics and Mining Sciences. 31(6): 643–659.
Shao, J.F., Chiarelli, A.S. & Hoteit, N. 1998. Modeling of
coupled elastoplastic damage in rock materials. International Journal of Rocks Mechanics and Mining Sciences.
35(4–5): Paper No. 115.
Sharan, S.K. 2003. Elastic-brittle-plastic analysis of circular openings in Hoek-Brown media. to appear in
International Journal of Rocks Mechanics and Mining
Sciences & Geomechanics Abstracts.
Souley, M., Homand, F., Hoxha, D. & Chibout, M. 1999.
Damage around a keyed URL excavation: change in permeability induced by microcracks growth. In Detournay
& Hart (eds), FLAC and Numerical Modeling in Geomechanics: 205–213. Rotterdam: Balkema.
Souley, M., Hoxha, D. & Homand-Etienne, F. 1998. Distinct
element modelling of an underground excavation using a
continuum damage model. International Journal of Rocks
Mechanics and Mining Sciences. 35(4–5): Paper No. 6.
Steif, P.S. 1984. Crack extension under compressive loading. Engineering Fracture Mechanics. 20(3): 463–473.
Su, K. 2002. Analysis of the capacity of numerical models
to simulate excavation in deep argillaceous rock,
5th EURATOM framework programme, MODEX-REP
project contract FIKW-CT2000-00029 – Deliverable 1,
August 2002.
Su, K. 2003. Constitutive models of the Meuse/HauteMarne Argilites, MODEX-REP project contract FIKWCT2000-00029 – Deliverable 2&3, February 2003.
Voller, V., Peng, S. & Chen, Y. 1996. Numerical Solution of
Transient, Free Surface Problems in Porous Media.
International Journal of Numerical Methods in Engineering. 2889–2906.
Vouille, G., Tijani, M. & Miehe, B. 2001. Hydro-mechanical
theoretical problem: Drainage of an infinite medium
by a cylindrical hole. In EC-5th EURATOM framework
programme 1998–2000 MODEX-REP project: contract
FIKW-CT-200-00029, NOT-EMP-01-02, Technical Note,
fevrier 08.
Wong, T.F. 1982. Micromechanics of faulting in Westerly
granite. International Journal of Rocks Mechanics and
Mining Sciences. 19(1): 49–62.
agreement between predicted peak and residual
strengths and theoretical ones.
Comparison of normal displacement between the
semi-analytical solution and the numerical ones indicates a very good agreement: the relative error is globally about 0.2%. Also, for a given radial distance,
both numerical and semi-analytical solutions are
quantitatively and qualitatively similar in terms of
pore pressure results with a neglected difference
(0.02 MPa) compared to the initial field of pore pressure (4.7 MPa).
In terms of radial and orthoradial effective stresses,
the semi-analytical and numerical solutions are qualitatively the same. Far to the gallery wall, the stress
difference does not exceed 0.3 MPa (that corresponds
to a relative error of 2%).
REFERENCES
Carranza-Torres, C. & Fairhurst, C. 1999. The elasto-plastic
response of underground excavations in rocks masses
that satisfy the Hoek-Brown failure criterion. International Journal of Rocks Mechanics and Mining Sciences.
36(6): 777–809.
Detournay, E. & Cheng, A.H.-D. 1993. Comprehensive Rock
Engineering. Pergamon Press Ltd.
Detournay, E. & Cheng, A.H.-D. 1988. Poroelastic Response
of a Borehole in a Non-Hydrostatic Stress Field. International Journal of Rocks Mechanics and Mining Sciences.
25(3): 171–182.
Homand-Etienne, F., Hoxha, D. & Shao, J.F. 1998. A continuum damage constitutive law for brittle rocks. Computers
and Geotechnics. 22(2): 135–151.
Ju, J.W. 1989. On the energy based on coupled elastoplastic
damage theories: constitutive modeling and computational aspects. International Journal of Solids Structures.
25(7): 803–833.
Lemaitre, J. 1985. A course on damage mechanics. 2nd edition. Springer.
80
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-10.qxd 08/11/2003 20:20 PM Page 81
Slope stability
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-10.qxd 08/11/2003 20:20 PM Page 83
FLAC and Numerical Modeling in Geomechanics, Brummer et al. (eds)
© 2003 Swets & Zeitlinger, Lisse, ISBN 90 5809 581 9
A parametric study of slope stability under circular failure condition
by a numerical method
M. Aksoy & G. Once
Osmangazi University, Mining Engineering Dept., Eskisehir, Turkey
ABSTRACT: Slope failures can cause delay in the production schedule and the loss of life and equipment. In
this study, slopes excavated in very weak rock masses where expected failure mode is circular failure have been
studied. The effects of slope height, slope angle, water saturation, cohesion, internal friction angle and density
on slope stability under circular failure conditions have been investigated by three methods: Hoek and Bray stability diagrams, Bishop’s simplified method of slices, and finite difference numerical code, FLAC3D (Itasca 1997).
Safety factor calculations have been carried out for the various values of parameters and obtained values are
compared with each other. However, the main focus is on the results of the numerical modeling. The presence
of correlation between the studied parameters and the factors of safety obtained from numerical models has
been searched and the fitted equation has been given.
Factor of safety is used as an index to define the
slope stability and it can be simply described as the ratio
of the total resisting force to the total inducing force.
In this study, the investigation of circular (rotational
shear) failure usually observed in the altered rock or
soil slopes has been based on the effects of geomechanical properties of rock or soil and the shape of the
slope on the slope stability. How the safety factor values
are affected with the variation of the parameters values
have been searched by three methods and calculated
safety factors have been compared.
1 INTRODUCTION
Slope stability is one of the most important subjects
in mining and civil applications. In open pit mining,
especially, the design of a stable slope has become
important to meet the safety regulations in addition to
the profitable extraction of the deposit. This can be
achieved by the proper selection of slope angle, shape
and height.
The factors governing the stability of an open pit
slope can be listed as follows (Stacey 1968):
–
–
–
–
Geological structure
Rock stresses and ground water conditions
Strength of discontinuities and intact rock
Pit geometry including both slope angles and slope
curvature
– Vibrations from blasting or seismic events
– Climatic conditions
– Time
2 METHODS APPLIED IN THE STUDY
As mentioned before, safety factors have been calculated by three different approaches:
1. Hoek and Bray stability diagrams
2. Bishop’s simplified method of slices
3. Numerical modeling in FLAC3D
The failure mode of a pit slope is also determined
by these factors. It can be said that a pit slope is
designed according to the failure mode expected to
occur (Sjöberg 1999). The main failure modes observed
in slopes can be listed as:
–
–
–
–
It should be emphasized that the assumptions of
each of these three methods are quite distinct and
clearly stated in the literature. In fact, one of the main
differences of these methods is that Hoek and Bray
and Bishop’s simplified method of slices are based
on 2-dimension limit equilibrium analysis whereas
FLAC3D is based on 3-dimension numerical analysis.
Therefore, in order to compare the results of these
methods, the location of critical failure surface
Plane failure
Wedge failure
Circular failure
Toppling failure
83
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-10.qxd 08/11/2003 20:20 PM Page 84
Table 1. Parameter values used in all approaches.
determined from the chart given by Hoek and Bray
(1981) was chosen as a basis for comparison purpose.
In other words, safety factors have been calculated for
this critical failure surface by these three methods.
However, the main focus of this study is on the results
of numerical modeling.
Geomechanical properties of rock and the shape of
the slope used in this study can be listed as:
–
–
–
–
–
–
Values
Parameters
Values
Cohesion (kPa)
50
90*
130
170
20
25*
30
35
40
Cohesion fully
saturated (kPa)
50
90
130
170
30
40
50
60*
70
1.6
1.9
2.2
2.5*
2.8
Slope height (m)
Internal friction
angle (°)
Cohesion
Internal friction angle
Density
Water condition
Slope angle
Slope height
Density (t/m3)
All these factors have been taken as parameters
and safety factors have been calculated. For all three
methods, the value of the parameter whose effect on
safety factor will be investigated has been changed
while the other parameters have been kept constant.
The parameters and values used are given in Table 1.
2.1
Parameters
Slope angle (°)
20
50*
80
140
200
*Constant values.
Hoek and Bray stability diagrams
Hoek and Bray have adopted an approach in which a
series of the slope stability charts have been presented
for circular failure (Hoek & Bray 1981). These stability
diagrams have been used to find safety factor values.
2.2
Bishop’s simplified method of slices
For the safety factor calculations, models have been
formed in SLOPE/W program (Geo-soft, student edition). The search for the critical failure surface could
be carried out in the program. But as mentioned
before, instead of this, these calculations have been
done for the critical failure surfaces whose locations
have been determined from the Hoek’s chart. A model
used in the analysis is shown in the Figure 1.
2.3
Figure 1. A model formed in the SLOPE/W.
numerical models have been performed by means of a
fish function written for this purpose (Aksoy 2001). The
safety factor definition used has been based on the first
approach proposed by Kourdey et al. (2001), but it has
been modified and these modifications are as follows:
Numerical modeling in FLAC3D
– The mohr-coulomb failure criteria is directly used
– The state of stress of zones are obtained from elastic,
isotropic models
– Normal and shear stresses are calculated on the
critical plane of each zone
According to the methodology proposed by Starfield &
Cundall (1998), numerical modeling can be used to
determine how different variables affect the slope stability. In this study, FLAC3D, a commercial finite difference code by Itasca, was selected for the purpose
of numerical modeling and analysis. It is a threedimensional explicit finite difference program for engineering mechanics computations and it offers an ideal
analysis tool for the solution of three-dimensional
problems in geotechnical engineering (Itasca 1997).
The stresses developed on the any zone in the
numerical model can be expressed in terms of 1 and 3
and these stresses can be plotted on the mohr diagram
as seen in Figure 2.
To make safety factor definition clear, it is explained
below in detail for the case in which the value of
cohesion is changed while the value of internal friction
angle is kept constant.
There will be a critical plane on which the available shear strength will be first reached as 1 is
increased. The orientation of this critical plane for
2.3.1 Safety factor calculations in FLAC3D
FLAC3D does not calculate factor of safety directly (in
version 2.0). However, it can be done by writing a fish
function. In this study, safety factor calculations for
84
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-10.qxd 08/11/2003 20:20 PM Page 85
Figure 3. The general slope model and initial vertical
stress state in FLAC3D.
Figure 2. Mohr diagram.
where si shear strength; n normal stress;
internal friction angle.
Local safety factor is described as the ratio of shear
strength to shear stress developed on the critical plane
for each zone:
each zone can be calculated from the Equation 1
(Brady & Brown 1993):
(1)
where angle between critical plane and the horizontal; internal friction angle.
Normal and shear stresses developed in this plane
can be expressed as follows:
(7)
where F1 local safety factor; si shear strength;
st shear stress.
For the calculation of general safety factor Fg, the
zones on the critical failure surfaces whose locations
have been determined from the Hoek’s chart are used
and general safety factor defined as:
(2)
(3)
where n normal stress; 1 major principal stress;
3 minor principal stress; angle between critical
plane and the horizontal; st shear stress.
For the critical plane, these equations are rewritten
due to sin2 cos and cos2 sin (Brady &
Brown, 1993):
(8)
where Fg general safety factor; Fli local safety
factor of the zone I; and vi volume of the zone i.
This approach is used for all parametric studies.
But, in the case of different internal friction angle values, the orientation of critical plane for which shear
and normal stresses are calculated is taken as constant
at the value found for internal friction angle 25°. In
other words, it is assumed that the orientation of critical
plane has not been affected by the change of internal
friction angle value. The reason for this is to compare
safety factor values at the same normal stress level.
(4)
(5)
where st shear stress; 1 major principal stress;
3 minor principal stress; internal friction
angle; n normal stress.
As it can be seen on Figure 3, mohr failure envelopes
that have different cohesion values with the same internal friction angle are drawn. Shear stress values at the
intersection points (A1, A2) of mohr failure envelopes
with the A2 D line are accepted as the shear strength
values (s1, s2) of the zone depending on the value of
cohesion and internal friction angle. And these shear
strengths can be calculated from the Equation 6:
3 NUMERICAL MODEL STUDIES AND
PARAMETRIC ANALYSIS
Rock mass has been assumed as isotropic and homogeneous material through the study and the stresses in the
numerical models have been initialized by taking the
slope geometry into consideration. The general slope
model and initial stress state is given in the Figure 3.
In addition to cohesion, internal friction angle and
density properties given in Table 1, the other material
(6)
85
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-10.qxd 08/11/2003 20:20 PM Page 86
models has been searched. For this purpose, a R factor
has been proposed and calculated from the Equation 11:
properties used in numerical modeling are given in
Table 2. k ratio, the ratio of horizontal stress to vertical
stress, has been found from the Equation 9:
(11)
(9)
where c cohesion; internal friction angle;
H slope height; slope angle; rock mass
density; and v Poisson ratio.
where h horizontal stress; v vertical stress;
Poisson ratio.
The procedure followed in numerical modeling
can be described as follows; first, material model for
all numerical models has been selected as elastic,
isotropic model. Safety factors have been calculated
by using the results of these model runs. After safety
factor calculations, all numerical models have been
modified in such way that their material models have
been changed from elastic, isotropic model into the
mohr-coulomb plasticity model. Modified models
have been run again and evaluated to determine the
failure condition (Aksoy 2001).
As it can be seen in Table 2, it has been assumed
that rock mass has no tensile strength. However, in
order to observe the effect of tensile strength on the
safety factor values of numerical models, new models
have been formed. In these models, tensile strength of
rock mass has been calculated from the Equation 10
(Brady & Brown 1993).
4 RESULTS
Results of three methods and failure conditions of
numerical models are summarized in Tables 3 & 4.
During the evaluation of the numerical models in
terms of failure, it should be noted that FLAC3D does
not produce a solution at the end of its calculation.
However, several indicators such as unbalanced force,
gridpoint velocities, plastic indicators and histories
are used to asses the state of the numerical model in
terms of stable, unstable, or in steady-state plastic
flow (Itasca 1997).
Table 3. Safety factors by Bishop and Hoek and Bray.
Safety factor
(10)
where t tensile strength; c cohesion; internal
friction angle.
It has been also considered that changing the
Poisson ratio taken as 0.25 for all models will change
the magnitude of the horizontal stress and this will
differentiate the stress state developed within the
slope. As a result, this will affect the safety factor values of the slopes and to observe this effect, new models having different Poisson ratios have been run for
different cohesion values.
At the final stage of this study, the presence of a
relationship between the parameters with the addition
of Poisson ratio and safety factors in the numerical
Values
Elastic modulus
Bulk modulus
Shear modulus
Tensile strength
Poisson ratio
k Ratio
Dilation angle
1.70 GPa
1.13 GPa
0.68 GPa
0.00 Pa
0.25
0.33
0.0
Bishop
Hoek and Bray
Cohesion
(kPa)
50
90
130
170
20
25
30
35
40
1.6
1.9
2.2
2.5
2.8
50
90
130
170
30
40
50
60
70
20
50
80
140
200
0.752
0.952
1.156
1.361
0.849
0.952
1.088
1.222
1.371
1.210
1.097
1.015
0.952
0.904
0.364
0.561
0.751
0.943
1.866
1.375
1.114
0.952
0.802
1.589
0.952
0.781
0.666
0.614
0.695
0.895
1.070
1.236
0.800
0.895
1.014
1.152
1.263
1.108
0.990
0.960
0.895
0.859
0.498
0.695
0.848
0.990
1.630
1.306
1.070
0.895
0.760
1.485
0.895
0.733
0.593
0.522
Density (t/m3)
Cohesion
(fully saturated)
(kPa)
Slope angle
(°)
Slope height
(m)
86
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
Values
Internal friction angle (°)
Table 2. Material properties.
Properties
Parameters
09069-10.qxd 08/11/2003 20:20 PM Page 87
These indicators are shown in Figure 4 for one of the
numerical models. The displacement vectors and the
contours of shear strain increment of the same numerical model are given in Figure 5.
In the light of the evaluation of the numerical models
having the mohr-coulomb plasticity model, safety factors of numerical models have been classified in terms
of failure, and given in Figure 6.
Safety factor values obtained from the models having different Poisson ratios for cohesion parameter
are given in Figure 7.
Results of the safety factor calculation for numerical models with different tensile strengths calculated
according to Equation 10 are shown in Figure 8 for
the cohesion parameter.
A correlation has been established between R factor and safety factors of numerical models. According
to this, the obtained linear regression model and correlation coefficient are as follows:
Table 4. Safety factors and failure conditions of numerical
models in FLAC3D.
Parameters
Values
Safety factor
Failure
Cohesion
(kPa)
50
90
130
170
0.551
0.705
0.859
1.013
YES
YES
NO
NO
Internal friction angle (°)
20
25
30
35
40
0.641
0.705
0.750
0.788
0.821
YES
YES
NO
NO
NO
Density (t/m3)
1.6
1.9
2.2
2.5
2.8
0.900
0.815
0.753
0.705
0.668
NO
NO
YES
YES
YES
Cohesion
(fully saturated)
(kPa)
50
90
130
170
0.103
0.141
0.180
0.218
YES
YES
YES
YES
Slope angle
(°)
30
40
50
60
70
1.450
1.038
0.856
0.705
0.551
NO
NO
NO
YES
YES
Slope height
(m)
20
50
80
140
200
1.094
0.705
0.597
0.533
0.472
NO
YES
YES
YES
YES
(12)
where F safety factor; r correlation coefficient.
It can be said that there is a very strong positive
linear relationship between R factor and safety factor
and it is shown in the Figure 9.
5 CONCLUSIONS
For all parameters high safety factor values have been
given by Bishop Approach and it has been followed
by Hoek and Bray and FLAC3D approaches. But in
full saturated condition, high safety factor values are
given by Hoek and Bray approach and it is followed
by Bishop and FLAC3D approaches.
It was considered that the reason for low safety
factor values in numerical models was the assumption
of no tensile strength. Then new numerical models in
which tensile strength was calculated depending on the
cohesion and internal friction angle have been run and
Figure 4. Indicators used to assess the state of the numerical model.
87
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-10.qxd 08/11/2003 20:20 PM Page 88
Figure 5. The displacement vectors and the contours of shear strain increment of the numerical model.
1.6
1.2
Safety Factor
Safety Factor
1.4
1.0
0.8
0.6
0.4
Failure
No failure
0.2
0.0
1
2
3
4
5
6
7
8
1.8
1.6
1.4
1.2
1.0
0.8
0.6
0.4
0.2
0.0
στ = 0
στ # 0
50
9 10 11 12 13
90
130
Cohesion (kPa)
170
Figure 6. Safety factor values classified in terms of failure.
Figure 8. Safety factors at two different tensile strength
conditions.
1.4
2
1.0
0.8
0.15
0.6
0.20
0.4
0.25
0.2
0.30
0.0
Safety Factor
Safety Factor
1.2
90
130
Cohesion (kPa)
0.5
0
0.005
0.01
0.015
0.02
R Factor
170
Figure 9. The relationship between R factor and safety factor.
Figure 7. Safety factors calculated for different cohesion
values with the different Poisson ratio.
When safety factor values of numerical models
given in Figure 6 are considered, no failure has been
observed in the models whose safety factors are higher
than 0.8.
Finally, a preliminary estimate value of the safety
factor can be obtained before numerical modeling by
using proposed regression model (equation 12). It can
safety factor values have been calculated. As it can be
seen in Figure 8, the new values are higher.
It can be also said that another reason for low safety
factor values in numerical models can be the numerical
discretization chosen in this study.
88
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
1
0
0.35
50
1.5
09069-10.qxd 08/11/2003 20:20 PM Page 89
Hoek, E. and Bray, J.W. 1981. Rock Slope Engineering.
London Institution of Mining and Metallurgy, 358 p.
Itasca Consulting Group, Inc. 1997. FLAC3D – Fast
Lagrangian Analysis of Continua in 3 Dimensions, Version
2.0 User’s Manual. Minneapolis, MN: Itasca.
Kourdey, A., Alheib, M. and Piguet, J.P. 2001. Evaluation of
Slope Stability by Numerical Methods, 17th Int. Mining
Congress and Exhibition of Turkey, IMCET 2001. Ankara.
Sjöberg, J. 1999. Analysis of Large Scale Rock Slopes,
Doctoral Thesis, Lulea University of Technology.
Stacey, T.R. 1968. Stability of Rock Slopes in Open Pit Mines.
National Mechanical Engineering Research Institute.
Council for Scientific and Industrial Research, CSIR
Report MEG 737, Pretoria, South Africa, 66 p.
Starfield, A.M. and Cundall, P.A. 1988. Towards a Methodology for Rock Mechanics Modeling. Int. J. Rock Mech.
Min. Sci. & Geomech. Abstr. 25(3): 99–106.
be useful during the design stage. But it should be
noted that this regression model should be used with
great caution. The reason for this is that safety factors
calculated by using equation 12 will depend on numerical models formed in this study. Because, equation 12
has been obtained from regression analysis carried out
on the results of numerical modeling studies. These
results are greatly affected by numerical discretization
chosen for numerical models in this study.
REFERENCES
Aksoy, M. 2001. A Study on the Effect of Parameters
Affecting safety Factor of Slopes under Circular Failure
Condition, MSc Thesis, Osmangazi University, Turkey.
Brady, B.H.G. and Brown, E.T. 1993. Rock Mechanics for
Underground Mining. London Second Edition, Chapman &
Hall.
89
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-11.qxd 08/11/2003 20:20 PM Page 91
FLAC and Numerical Modeling in Geomechanics, Brummer et al. (eds)
© 2003 Swets & Zeitlinger, Lisse, ISBN 90 5809 581 9
Numerical modeling of seepage-induced liquefaction and slope failure
S.A. Bastani
Leighton Consulting, Inc., Irvine, California, USA
B.L. Kutter
University of California, Davis, California, USA
ABSTRACT: Several earth dams, tailings dams, and slopes failed or were severely damaged due to liquefaction
during or after earthquakes. In seismic areas, earth structures such as embankments may be subjected to two forces:
the static loads due to gravity and the inertia forces caused by earthquakes. In a significant number of cases, liquefaction-induced failure of embankments occurred from seconds to hours after an earthquake. In these cases, liquefaction reduced the material strength and the failure occurred only under static loads. A finite slope was modeled at
UC Davis National Geotechnical Centrifuge to evaluate post-earthquake deformations with an injection-induced
liquefaction system. A constitutive model was developed to capture the behavior of sands with a minimum number
of physically meaningful parameters to enable prediction of post-earthquake liquefaction and/or seepage-induced
liquefaction. This constitutive model is based on the Mohr-Coulomb constitutive model and the Critical State concept by adding three parameters to the conventional Mohr-Coulomb model. The constitutive model performed adequately for modeling the sand behavior under monotonic drained and undrained triaxial loading and water injection
for a simple shear test under a constant shear stress. Using the new constitutive model, the failure mode of the centrifuge model due to seepage-induced liquefaction was studied utilizing FLAC. Stress and strain paths for specific
elements in the embankment are studied and presented in this paper.
The centrifuge test was modeled by Fast Lagrangian
Analysis of Continua (FLAC) computer code utilizing
a new constitutive model as presented in this paper. For
more details on the centrifuge and numerical models
refer to Bastani (2003).
1 INTRODUCTION
Examples of post-earthquake liquefaction-induced failures of embankments are reported by Dobry & Alvarez
(1967), Seed et al. (1975), Okusa et al. (1978), and Finn
(1980). In these cases, liquefaction reduced the material
strength and the failure occurred under static forces
after the earthquake shaking. One mechanism for the
delayed failure is the softening associated with redistribution of void ratio caused by gradients of pore water
pressure in sloping ground with non-uniform permeability. This mechanism has been studied by Malvick
et al. (2003) and Kokusho & Kojima (2002).
For the present study, the post-earthquake
liquefaction-induced failure of granular embankments
was investigated by a static centrifuge test in which the
water that might be produced during an earthquake due
to densification of deep saturated soil was simulated by
injecting a similar volume of water at the base of the
model as presented in detail by Bastani (2003). This
centrifuge model consisted of a coarse sand layer with
a constant thickness at its base to spread the injected
water beneath an embankment composed of a fine
sand capped by a layer of low permeability clayey silt.
2 CENTRIFUGE MODEL
The centrifuge model consisted of three layers:
1. A uniform 51 mm thick layer of Monterey Sand
(mean grain size 1.25 mm);
2. A fine sand (Nevada Sand, mean grain size 0.12 mm) embankment with a minimum thickness
of 102 mm at its toe and a maximum thickness of
356 mm at the slope crest; and
3. A uniform 51 mm thick layer of Yolo Loam that
capped the Nevada Sand embankment.
The horizontal lengths of the embankment toe, the
slope, and the crest were 356, 584, and 533 mm, respectively. The slope angle was 23.5 degrees. The average
void ratio of the Nevada Sand was 0.77 corresponding
to a relative density of 33 percent; at this density,
91
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-11.qxd 08/11/2003 20:20 PM Page 92
(15,19)
(15,16)
(18,4)
where e is the void ratio, (ecs)a is the critical state void
ratio at one atmosphere, is the virgin compression
slope, p is the mean effective stress, and pa is the
atmospheric pressure.
As explained by Been & Jefferies (1985), the gradual change from dilative to contractive behavior can be
quantified in terms of the state parameter . The dilation angle (dilation) was modified based on the state
parameter and its changes according to the equation:
(40,16)
(34,12)
(28,16)
(20,13)
Yolo Loam
(13,9)
(18,6)
Nevada Sand
(47,6)
Monterey Sand
0
0.5
Grid plot
(2)
Figure 1.
FLAC grid.
where dilation is the updated dilation angle, (dilation)0
is the initial dilation angle, is the state parameter, and
is the variation of the state parameter. The soil’s
bulk and shear moduli are also modified in the model.
The bulk modulus (K) is evaluated using the relation:
the sand was highly dilative at the confining pressures
experienced in the experiment. The Yolo Loam had an
average undrained shear strength of about 10 kPa and
a water content of 33 percent. An additional overburden pressure equivalent to 90 mm of water head was
applied over a plastic membrane on the Yolo Loam
layer. All dimensions are provided in the model scale
and the embankment’s configuration is presented in
Figure 1. The centrifuge model was consolidated in
several stages as the centrifuge speed was increased up
to 37.9 g.
(3)
where is the unloading slope and p and e are
defined as above. The shear modulus (G) was consequently determined based on the bulk modulus (K)
and their elastic relationship:
3 CONSTITUTIVE MODEL
(4)
A constitutive model was developed to simulate
behavior of Nevada Sand in the FLAC program
framework, and it was incorporated in the numerical
modeling of the centrifuge test. The purpose of this
model was to predict the principal behavior of Nevada
Sand with a minimum number of parameters that are
physically defined and measurable.
The failure envelope for this constitutive model corresponds to the Mohr-Coulomb constitutive model
(shear yield function) with tension cutoff (tensile yield
function). The shear flow rule is non-associated and the
tensile flow rule is associated. The shear potential function corresponds to a non-associated flow rule. Details
of Mohr-Coulomb model implementation are explained
in the FLAC manual published by Itasca (2001).
Several modifications are made to the MohrCoulomb model. The mobilized friction angle
(mobilized cs dilation) is represented as a sum
of the critical state friction angle (cs) and the dilation
angle (dilation) as described by Bolton (1991). cs is
considered constant, while, the dilation is assumed to
be variable depending on the distance of the material
state from the critical state line in e-log(p ) space,
defined by the state parameter:
where v is Poisson’s ratio.
The behavior of the constitutive model under
selected load paths are presented in Figure 2 conventional drained triaxial compression, conventional
undrained triaxial compression, and a simple shear
element subjected to a constant applied shear stress
and water injection. Results are shown for deviator
stress (q), p , volumetric strain (v), void ratio (e), and
shear strain ().
This constitutive model predicted the strain hardening behavior of the Nevada Sand during undrained
shearing until cavitation occurred prior to reaching
the critical state line. The undrained path in Figure 2
approximately simulated the triaxial test data. Bastani
(2003) compared the calculated undrained stress
paths with experimental data (not shown here). The
model behaved more stiffly under the undrained condition, approximately 2 times more than what was
observed in the triaxial experiments for the Nevada
Sand with a relative density of 26%; but the model
reasonably matched test results for the Nevada Sand
with a relative density of 39.4%.
The model behavior exhibited elastic contraction
under the drained condition up to the peak shear
stress. Dilation started after the peak shear stress and
(1)
92
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-11.qxd 08/11/2003 20:20 PM Page 93
300
0.92
300
(')cs
(')cs+(')dilation
250
200
200
0.88
150
0.84
0.8
q (kPa)
q (kPa)
e
250
150
0.76
100
1
100
10
100
p'(kPa)
50
50
0
0
50
100
150
200
p'(kPa)
250
300
150
0.04
100
0.03
Model Behavior:
50
εv
Pore Water Pressure (kPa)
0
0
0.05
0.1
0.15 0.2
γ
0.25
0.3
0.35 0.4
0
0.05
0.1
0.15 0.2
γ
0.25
0.3
0.35 0.4
0.02
Drained Triaxial Test
Undrained Triaxial Test
0
0.01
Simple Shear (Khc =0.6, τxy =62 kPa)
-50
0
Cavitation
-100
-0.01
0
0.05
0.1
0.15 0.2
γ
0.25
0.3
0.35 0.4
Figure 2. Behavior of the new constitutive model.
Table 1. Model parameters.
continued up to the critical state condition. Finally, the
model behavior was studied under a constant shear
stress and pore water pressure increase, modeling a
simple shear test with pore fluid injection. The constitutive model slightly dilated prior to reaching the failure envelope; thereafter, the sample dilated with the
increase of pore water pressure and the stress path
approached the origin along the failure envelope in the
p -q space until it reached the critical state condition
similar to the stress path suggested by Boulanger
(1990). The dilation rate was less than that shown by
his experiment (Boulanger, 1990); however, the stress
path, boundary condition, and initial condition of the
experiments performed by Boulanger prior to water
injection into his simple shear tests were not known,
and therefore were not completely simulated by this
calibration. As expected, the water injection to the
element led to an unstable condition when the strength
of the element dropped below the applied shear
stress. Continued softening caused the stress path to
drop toward the origin while the sample collapsed
Value
*
( /5)
cs (degree)
(dilation)max (degree)
e0 (initial void ratio)
(ecs)a*
Atmospheric pressure, pa (kPa)
0.022
0.0044
32
10
0.25
0.77
0.809
101.2
* Archilleas et al. 2001.
dynamically under the unbalanced external loads.
Some oscillation is observed in the q– curves at shear
strains greater than 0.12, but the softening behavior can
still be clearly observed during the dynamic collapse.
The parameters used for this calibration and later
in the numerical modeling based on this constitutive
model are provided in Table 1.
93
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
Parameters
09069-11.qxd 08/11/2003 20:20 PM Page 94
4
for the two runs are plotted on Figure 3. This figure
indicates the following behaviors:
FLAC MODEL BEHAVIOR
FLAC version 4.0 was utilized to model the centrifuge
test. The numerical model was run twice. The first
run used the conventional Mohr-Coulomb constitutive model, while the second run utilized the new constitutive model (discussed in Section 3) to model the
Nevada Sand behavior. This numerical model was
bounded with its and the constitutive model’s limitations; however, it was successfully used to observe the
general mechanism of localized increase in void ratio
just beneath the less permeable clayey silt layer, and
the failure mechanism; exact predictions were not
expected. The FLAC runs were performed with the
large-strain mode.
Figure 1 shows the grid utilized in this model. The
grid nodes and elements are identified in the subsequent figures with their column and row numbers
(i,j). The column and row numbers increase from left
to right and bottom to top, respectively.
Contours of mobilized friction angle, volumetric
strain, and shear strain and grid deformation patterns
1. The mobilized friction angle was reduced along
the Nevada Sand interface elements by the new
constitutive model and along a deeper seated failure plane as shown by the new constitutive model;
2. Volumetric strains were concentrated along the
interface of Nevada Sand and Yolo Loam in both
numerical models. However, deeper volumetric
strains were observed in the modified constitutive
model, which coincided with the friction angle and
shear strain patterns;
3. Shear strains were also concentrated at the slope
interface within the Nevada Sand layer. Similarly a
deeper shear zone was predicted by the new constitutive model matching the volumetric strain and
mobilized friction angle reduction patterns;
4. Sand and clay layers moved downward at the slope,
which was translated to vertical uplift at the toe.
It is worthwhile to mention that the pore water pressure was mainly increased from the slope toe within
Figure 3. Friction angle, volumetric and shear strains, and deformation patterns at 13 seconds of seepage.
94
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-11.qxd 08/11/2003 20:20 PM Page 95
the second run due to the ability of the modified constitutive model to withstand a mobilized friction angle
greater than the critical state friction angle during dilation. The majority of volumetric strains of elements
were induced when the mean effective stress (p )
became less than 10 kPa and close to zero. The volumetric strains were stabilized wherever the injection
did not cause the strength to fall below the applied
shear stress.
Predicted pore water pressures and deformations
are compared with the experimental results in Figures
5 & 6, respectively. In general the predicted pore water
pressures are in good agreement with the experimental results for both constitutive models. However, the
initial rate of pore water pressure increase is in better
agreement with the new constitutive model. Similar
trends were obtained by the numerical model, such as
stabilization of pore water pressure at the beginning
and its further increase for PPT# 5296 (Fig. 5). Other
than deformation at the middle of the slope (LVDT
#3), where the experimental result indicated bulging,
deformation rates and magnitudes were predicted very
well by both models.
The numerical model successfully predicted the
dilatancy to cause a very loose layer of sand below
the Nevada Sand layer toward the slope crest and with
a slower rate from the back of the slope crest toward
the slope.
It should also be noted that the development of a
deep failure mechanism, or not, was affected by the
rate at which the water was injected relative to the
permeability of the soils. For somewhat slower injection, the deeper mechanism would disappear and sliding along the bottom interface of the Yolo Loam
would be apparent. For much greater injection rates, a
failure mechanism at the interface between the coarse
Monterey Sand and the fine Nevada Sand was
observed (Bastani 2003).
Stress/strain paths of several elements at the toe,
along the slope, and at the slope crest are plotted on
Figure 4. Effective stresses of slope/leaning elements
reduced while oscillating around constant shear stresses
up to the failure envelope. However, shear stresses of
carrying elements along the slope and its toe increased
during the failure of leaning elements until reaching
the failure envelope. Stress paths moved toward the
origin after reaching the failure envelope and strain
softening was observed. In general, the elements at the
toe and along the slope showed higher shear strengths
prior to their stress paths diving toward the origin in
Figure 4. Stress path and behavior of elements. Solid and dashed lines refer to the results of the new and Mohr-Coulomb
constitutive models, respectively.
95
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-11.qxd 08/11/2003 20:20 PM Page 96
Figure 6. Deformation time histories.
the less permeable layer of Yolo Loam. The calculated
volumetric strains of the dilated sand indicate a negligible residual strength after dilation.
5 CONCLUSION
A modified Mohr-Coulomb constitutive model was
developed based upon critical state theory in conjunction with a new expression for dilatancy that depends
on the state parameter (the distance between the state
and the critical state). The constitutive model was
shown to enable calculation of strain-softening paths,
and dilation due to water injection.
The constitutive model was implemented in FLAC
and used to analyze results of centrifuge model tests of
layered sloping ground subject to pore fluid injection.
The injection was intended to simulate the upward
flow of water that might be generated by densification
of deep soil deposits during earthquake shaking.
In the past, embankments made of dilative material
were considered to be safe, because the undrained
strength is greater than the driving stress (Poulos et al.
1985). The centrifuge tests and the FLAC analyses
Figure 5. Pore water pressure time histories.
96
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-11.qxd 08/11/2003 20:20 PM Page 97
Boulanger, R.W. 1990. Liquefaction Behavior of Saturated
Cohesionless Soils Subjected to Uni-Directional and BiDirectional Static and Cyclic Simple Shear Stresses.
Dissertation presented to University of California, at
Berkeley, in partial fulfillment of the requirements for
the degree of Doctor of Philosophy.
Castro & Poulos (ASCE paper circa 1984).
Dobry, R. & Alvarez, L. 1967. Seismic Failure of Chilean
Tailing Dams. Journal of Soil Mechanics and Foundations Division, Proceeding of the American Society of
Civil Engineers 93(SM6): 237–260.
Finn, W.D. 1980. Seismic Response of Tailing Dams.
Presented at Seminar on Design and Construction of
Tailing Dams, Colorado School of Mines, Denver,
Colorado, pp. 76–97.
Itasca Consulting Group, Inc. 2001. FLAC – Fast Lagrangian Analysis of Continua, Ver. 4.0 User’s Manual.
Minneapolis, MN: Itasca.
Kokusko, T. & Kojima, T. 2002. Mechanism for Postliquefaction Water Film Generation in Layered Sand. Journal
of Geotechnical Engineering, ASCE 128(2): 129–137.
Malvick, E.J., Kulasingam, R., Boulanger, R.W. & Kutter, B.L.
2003. Analysis of a Void Ratio Redistribution Mechanism in Liquefied Soil. To be Published in Proceedings
of the June 2003 Soil and Rock America Conference.
Okusa, S., Anma, S. & Maikuma, H. 1978. Liquefaction of
Mine Tailing in the 1978 Izu-Ohshima-Kihkai Earthquake, Central Japan. Engineering Geology Vol. 16, pp.
195–224, Elsevier Scientific Publishing Co.
Poulos, S.J., Castro, G. & France, J.W. 1985. Liquefaction
Evaluation Procedure. Journal of the Geotechnical Engineering Division, ASCE 111(6): 772–792.
Seed, H.B., Lee, K.L., Idriss, I.M. & Makdisi, F.I. 1975. The
Slides in the San Fernando Dams during the Earthquake
of February 9, 1971. Journal of the Geotechnical Engineering Division, ASCE 101(GT7): 651.
presented here clearly demonstrate the possibility that
layers that impede drainage may cause a significant
localized zone of softened material that should be
considered a possibility in seismic design. To determine induced deformations due to local drainage of a
system, a material model that captures this process
should be incorporated in the numerical model. The
mode of failure and local drainage of the centrifuge
test presented here was successfully predicted utilizing the modified Mohr-Coulomb constitutive model
in conjunction with FLAC numerical framework.
ACKNOWLEDGEMENT
The authors would like to thank Dr. Ben Hushmand,
James Ward, and Vivian Cheng for reviewing this
paper and providing constructive comments.
REFERENCES
Archilleas, G.P., Bouckovalas, G.D. & Dafalias, Y.F. 2001.
Plasticity Model for Sand Under Small and Large Cyclic Strains. Journal of Geotechnical Engineering, ASCE
127(11):.973–983.
Bastani, S.A. 2003. Evaluation of Deformations of Earth
Structures due to Earthquakes. Dissertation presented to
University of California, at Davis, in partial fulfillment of
the requirements for the degree of Doctor of Philosophy.
Been, K. & Jefferies, M.G. 1985. A State Parameter for
Sands. Geotechnique 35(2): 99–112.
Bolton, M. 1991. A Guide to Soil Mechanics. Published by
M D & K Bolton, Printed by Chung Hwa Book Company,
pp. 63–92.
97
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-12.qxd 08/11/2003 20:21 PM Page 99
FLAC and Numerical Modeling in Geomechanics, Brummer et al. (eds)
© 2003 Swets & Zeitlinger, Lisse, ISBN 90 5809 581 9
Complex geology slope stability analysis by shear strength reduction
M. Cala & J. Flisiak
Dept. of Geomechanics, Civil Engineering & Geotechnics, AGH University of Science & Technology, Poland
ABSTRACT: The stability of slopes may be estimated using 2D limit equilibrium methods (LEM) or numerical
methods. Due to the rapid development of computing efficiency, several numerical methods are gaining increasing
popularity in slope stability engineering. A very popular numerical method of slope stability estimation is the shear
strength reduction technique (SSR). It’s a well known fact that for a simple slope factor of safety (FS) obtained from
SSR is usually the same as FS obtained from LEM. However for slopes of complex geology, considerable differences between FS values may be expected. Application of SSR for such slopes is usually restricted to the weakest
link estimation – that part of the slope with the lowest FS. Finite Difference Method code, FLAC (Itasca 2000), gives
the opportunity to analyze several slip surfaces by using the modified SSR technique (MSSR). The method is based
on reducing shear properties of soils after identification of the first slip surface. MSSR allows a complete estimation of stability for any type of slope.
geometry (and geology) it’s not possible to analyze FS
for other parts of the slope. This may sometimes lead
to serious mistakes.
1 INTRODUCTION
The stability of slopes may be estimated using 2D limit
equilibrium methods (LEM) or numerical methods.
Due to the rapid development of computing efficiency,
several numerical methods are gaining increasing popularity in slope stability engineering. A very popular
numerical method of slope stability estimation is shear
strength reduction technique (SSR). In that procedure,
the factor of safety (FS) of a soil slope is defined as the
number by which the original shear strength parameters must be divided in order to bring the slope to the
point of failure (Dawson & Roth 1999).
It’s a well known fact that for simple slopes FS
obtained from SSR is usually the same as FS obtained
from LEM (Griffiths & Lane 1999, Cala & Flisiak
2001). However for complex geology slopes considerable differences between FS values from LEM and
SSR may be expected (Cala & Flisiak 2001). Several
analyses for the slope with weak stratum were performed to study the differences between LEM and SSR.
It must be also stated that classical SSR technique
has several limitations. Application of SSR requires
advanced numerical modeling skills. Calculation time,
in case of complicated models, can last as long as several hours.
However, the most fundamental limitation of SSR is
identification of only one failure surface (in some cases
it may identify more than one surface, but with the same
FS value). This is not a significant limitation in case
of simple geometry slope. But in case with complex
2 STABILITY OF SLOPE WITH WEAK
STRATUM
25 m
45°
Figure 1. Slope with weak stratum.
99
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
25 m
g h
To investigate the influence of a weak stratum on FS
some 350 models were analyzed. The thickness of the
weak stratum was changed from 1.0 to 10.0 m and it
was localized from 0 to 50 m from the top of the slope
(Fig. 1).
All slopes in this paper were simulated with FLAC/
Slope (Itasca 2002) or FLAC in plane strain, using
small-strain mode.
It was assumed that embankment is 25 m high and
has a slope angle of 45°. It consists of two different geological units. The soil was given friction angle 30°
09069-12.qxd 08/11/2003 20:21 PM Page 100
2
2
1.9
1.9
1.8
1.7
1.6
1.7
1.5
FS
FS
1.8
1.4
1.6
1.3
Weak layer 1 m thick
FLAC
Fellenius
Bishop
Janbu
1.5
Weak layer 5 m thick
FLAC
Fellenius
Bishop
Janbu
1.2
1.1
1.4
1
10
20
30
40
Distance of weak layer from slope crest
0
Figure 2. FS values for a 1.0 m thick weak layer.
20
30
40
50
Figure 3. FS values for a 5.0 m thick weak layer.
FLAC
FS = 1.54
Bishop
FS = 1.731
20 m
and cohesion c 75 kPa. The weak, thin layer had
friction angle 10° and cohesion c 25 kPa. Both
soils had unit weight 20 kN/m3. The thickness “g”
of the horizontal weak layer was changed from 1.0 m to
10.0 m and its distance “h” from the top of the slope
changed from 0 to 50 m.
Figure 2 shows the FS values for a 1.0 m thick weak
layer and Figure 3 for a 5.0 thick one. The decrease of
FS is quite small if the thin weak layer is located close
to the top of the slope.
Increasing the weak layer thickness produces considerable decrease of FS. The differences in FS values
are significant especially in case of small thickness
(1 m–3 m) of weak stratum
Increase of weak layer thickness (irrespectively of its
localization) reduces differences between FS values
from LEM and SSR. Especially FS values estimated
with Bishop’s are within 8 % of the FS obtained from
SSR.
For the thickness of the weak layer less than or equal
to 5 m SSR produces lower FS values than any of the
LEM methods. For the weak layer 5 m thick Bishop’s
method produces FS 1.114 and SSR shows FS 1.07.
Further increase of weak layer thickness (7.5 m and
10 m) produces lowest FS values from Bishop’s method
(FS 0.926 and FS 0.811 respectively). SSR technique shows respectively FS 0.95 and FS 0.87 in
this case.
It seems that application of Bishop’s method produces the most reliable results among LEM. These
results are simultaneously closest to the FS values
obtained from SSR. Application of Fellenius’s method
produces unreliable FS values in case of weak layer
Figure 4. Critical slip surfaces identified by SSR and LEM.
localization below slope toe. It shows the influence of
weak layer on FS values even if the roof of the stratum
lays 15 m below the slope toe.
It must be also pointed out that failure surfaces identified by SSR technique are sometimes considerably
different than surfaces identified by LEM (Fig. 4).
Figure 4 shows the situation when FS computed by SSR
is considerably lower and unit volume of failed slope
is significantly higher than estimated from LEM.
3 MODIFIED SHEAR STRENGTH
REDUCTION TECHNIQUE (MSSR)
3.1
Benched slope stability case
Application of SSR for complex geology slopes is usually restricted to the weakest “link” estimation – part
100
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
10
Distance of weak layer from slope crest
1m
0
09069-12.qxd 08/11/2003 20:21 PM Page 101
10 m
of the slope with the lowest FS. However the Finite
Difference Method code FLAC gives the opportunity
to analyze several slip surfaces using modified shear
strength reduction technique – MSSR (Cala & Flisiak
2003a, b).
This method is based on reducing shear properties of
soils after identification of first slip surface (FS1). It
is simply the continuation of classic SSR, but after
first instability occurrence. It is possible only using
Finite Difference Method. The FLAC program uses
the explicit, Lagrangian calculation scheme. The full
dynamic equations of motion are used, even when
modeling systems that are essentially static. This
enables FLAC to follow physically unstable processes
(i.e. several processes simultaneously) without numerical distress. In fact, FLAC is most effective when
applied to nonlinear or large-strain problems, or to situations in which physical instability may occur. This
may lead to identification of several other slip surfaces. The same criterion is used to identify secondary
(and further) failure surfaces. The primary and the following identified failure modes are constantly active
(not suppressed) during entire calculation process.
Let’s consider benched slope stability (Fig. 5).
Figure 6 shows the slip surfaces identified in
benched slope by MSSR and LEM. Failure of the lower
part of the slope was detected first. FS1 0.90 calculated by SSR is very close to FS 0.921 given by
Bishop’s method. And precisely here ends the range of
10 m
40º
3
= 20 kN/m
= 20º
C = 10 kPa
15 m
45º
15 m
15 m
20.918 m
Figure 5. Benched slope case geometry.
Bishop
FS = 1.228
Bishop FS3 = 1.24
FS = 0.921
Bishop
FS = 1.008
FS2 = 1.00
classical SSR technique – especially with application
of any Finite Element Method code. However FLAC is
created especially for modeling physical instability (in
this case – physical instabilities would be better term).
This allows to continue shear strength reduction
and to identify another possible slip surfaces. In analyzed case, next identified failure surface is located
in the upper part of the slope. FS2 1.00 calculated
by MSSR is again very close to FS 1.008 given by
Bishop’s method. And finally application of MSSR
allowed to evaluate FS for entire slope – FS3 1.24 is
also very close to FS 1.228 given by Bishop’s
method.
It seems that FS calculated with MSSR are within a
few percent of the FS obtained from LEM for simple
cases. It must be however underlined that effectiveness
of MSSR must be verified on real cases.
3.2
Large scale, complex geology slope
stability case
Let’s consider a slope consisted of eight different geological units (from a Polish lignite open pit mine).
The mechanical properties of the soil units involved
in the slope are given in Table 1.
Figure 7 shows geometry and geology of the analyzed slope. The overall sloping angle was equal
! 7.477°.
Figure 8 presents the slip surface identified by
MSSR and LEM. Again SSR finds the location of the
lowest safety factor FS1 0.67. Application of MSSR
identifies four new slip surfaces in several parts of the
slope. FS2 0.87 also shows the local failure surface
which, in fact, does not affect the overall slope stability (precisely like previous one). Another possible
failure surface with FS3 1.02 is based on layer 5
(very thin and weak one) and broken line upward.
Further analysis showed development of previous
failure surface with FS4 1.17 occurring mainly in
layer 5. Bishop’s method applied to the upper part of the
slope shows cylindrical failure surface with FS 1.351.
It must be noted that due to cylindrical shape
Bishop’s slip surface covers a little more soil volume.
Table 1. Mechanical properties of soil units.
Unit
Cohesion
c, kPa
Friction angle
, deg
Unit weight
, kN/m3
1
2
3
4
5
6
7
8
14.0
90.0
11.4
90.0
11.4
90.0
28.0
1000
6.5
10.9
7.9
10.9
7.9
10.9
8.5
30.0
18.3
19.5
19.5
19.5
19.5
19.5
20.0
23.0
FS1 = 0.90
Figure 6. Several slip surfaces identified in benched slope
by MSSR and LEM.
101
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-12.qxd 08/11/2003 20:21 PM Page 102
63 m
2
4
5
6
7
8
168 m
1
3
800 m
Figure 7. Slope geometry and geology.
FS4 = 1.17
FS3 = 1.02
FS1 = 0.67
Bishop
Bishop
FS = 1.255 FS = 1.351 FS2 = 0.87
FS5 = 1.29
Figure 8. FS values and critical slip surfaces identified with MSSR and LEM.
FS 1.351 is however considerably higher than
FS4 1.17 from MSSR.
And finally an overall slope failure surface with
FS5 1.29 is identified. Bishop’s method shows
FS 1.255, but it covers considerably lower soil volume. Generally, the results obtained from LEM are not
that close to MSSR as in the simple case discussed
before.
It’s a well-known fact that application of LEM
requires assumption about shape and location of slip
surface. Circular failure surfaces were assumed here for
calculation purposes. Critical slip surface with lowest
FS value was estimated from 20,000 circles.
In MSSR there is no need for such assumptions.
Stress and strain field in analyzed soil determines the
shape and location of the slip surfaces.
4 CONCLUSIONS
For a simple, homogeneous slope FS calculated with
SSR are usually the same as FS obtained from LEM.
In the case of a simple geometry slope consisting of
two geological units, FS calculated with SSR may be
considerably different than FS from LEM.
In the case of complex geometry and geology
slopes SSR technique is much more “sensitive” than
LEM. Another step forward is the modified shear
strength reduction technique – MSSR. Application of
SSR with FLAC may be recommended for the largescale slopes of complex geometry.
Such a powerful tool as MSSR with FLAC gives
the opportunity for the complete stability analysis for
any slope.
ACKNOWLEDGEMENTS
Support for this research by the State Committee for
Scientific Research (Project No. 5 T12A 022 24) is
gratefully acknowledged.
REFERENCES
Cala M. & Flisiak J. 2001. Slope stability analysis with
FLAC and limit equilibrium methods. In Billaux,
Rachez, Detournay & Hart (eds) FLAC and Numerical
Modeling in Geomechanics; Proc. Intern. Symp., Lyon,
France, 29–31 October 2001: 111–114. Rotterdam:
Balkema.
Cala M. & Flisiak J. 2003a. Analysis of slope stability with
modified shear strength reduction technique. XXVI
Winter School of Rock Mechanics: 348–355. Wroclaw.
IGiH, (in polish).
Cala M. & Flisiak J. 2003b. Slope stability analysis with
numerical and limit equilibrium methods. Computational
Methods in Mechanics; Proc. Intern. Symp., 3–6 June
2003 (in press).
Dawson E.M. & Roth W.H. 1999. Slope stability analysis
with FLAC. In Detournay & Hart (eds) FLAC and
Numerical Modeling in Geomechanics; Proc. intern.
symp., Minneapolis, MN, 1–3 September 1999: 3–9.
Rotterdam: Balkema.
Itasca Consulting Group. 2000. FLAC – Fast Lagrangian
Analysis of Continua, Ver. 4.0 User’s Manual.
Minneapolis, Minnesota: Itasca.
Itasca Consulting Group. 2002. FLAC/Slope Ver. 4.0 User’s
Manual. Minneapolis, Minnesota: Itasca.
Griffiths D.V. & Lane P.A. 1999. Slope stability analysis by
finite elements. Geotechnique. 49(3): 387–403.
102
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-13.qxd 08/11/2003 20:24 PM Page 103
FLAC and Numerical Modeling in Geomechanics, Brummer et al. (eds)
© 2003 Swets & Zeitlinger, Lisse, ISBN 90 5809 581 9
Analysis of hydraulic fracture risk in a zoned dam with FLAC3D
C. Peybernes
Electricité de France, Centre d’Ingénierie Hydraulique, France
ABSTRACT: The construction and first filling of a 150 m high zoned dam are modeled with FLAC. The site is
a deep and curved canyon under the dam. The aim of this study is the understanding of the dam behavior and the
assessment of the dam safety. A lot of attention is put on the hydraulic fracturing risk during construction or during
first filling due to the core arching in the deep canyon. 2D and 3D models are compared. The 2D model is unable
to explain the monitoring data, but the 3D model fits more accurately the monitoring measurement. Although a
high contrast of modulus exists between core and shell, no hydraulic fracturing is observed in the core.
2.1
1 DESCRIPTION OF STRUCTURE
The zoned dam has a clayey core with vertical downstream face, gravely downstream and upstream filters
and shells. The canyon in the bottom of the valley is
60 m deep, narrow, and turns under the dam. Main features are (Fig. 1):
–
–
–
–
Maximum height of dam: 137.00 m,
Maximum elevation: 1000.00 m,
Minimum elevation: 863.00 m,
Slopes of the faces: H/V 2/1.
Two geometrical models were meshed by Itasca
Consultant Spain office. The strategy was to use the
2D model to set the characteristics of the materials,
the loading scenario and the boundary conditions,
and to use the 3D model to analyze the arching effects
caused by the stiff banks.
load transfer from dam body to the canyon,
turn on the left of the valley (Fig. 3),
dissymmetry between the banks (Fig. 4),
plating of the filter against left bank (Fig. 5).
3 SETTING OF MATERIAL PROPERTIES
The model is fitted on several indicators from the
monitoring measurement.
Figure 2. Two-dimensional mesh (“section”).
103
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
Three-dimensional model
The mesh has 66,054 3D elements and 71,828 nodes.
The geometry of the contact dam foundation, in particular the canyon is rather faithful to reality.
This model has great advantages over the 2D. It
takes into account the following items:
–
–
–
–
2 TWO GEOMETRICAL MODELS
Figure 1. Standard profile.
The section is the deepest one in the canyon perpendicular to the dam axis (Fig. 2). It is 1 m wide modeled by FLAC3D. The mesh has 1861 3D elements and
3890 nodes. The constitutive equations of material
are programmed for both 2D and 3D files.
2.2
The downstream toe is submerged by the reservoir
of the downstream dam from elevation 890.0 to
906.0 m.
Two-dimensional model
09069-13.qxd 08/11/2003 20:24 PM Page 104
– Settlements in the core measured at the end of the
construction (up to 80 cm).
– total stresses in the core
– pore water pressures in the core
– deformations in the downstream shoulder recorded
by three tassometers and two extensometers.
4 CONSTITUTIVE EQUATIONS FOR SOIL
Two different constitutive models are used:
1. elastic model, for first parameter setting,
2. plastic law: Mohr-Coulomb.
5 SCENARIO OF LOADING
5.1
Initialization of the model
The initial stress state is calculated in the foundation,
alluvium filling and excavation at the core location.
The initial equilibrium calculation is only mechanical
(zero pore pressure).
5.2
Figure 3. Global sight of the model.
Construction
The construction period is 4 years and the embankment
is placed in 4 m layers.
5.2.1 Hydraulic boundary conditions
At the boundary of the core, the water pressure (Pw)
is fixed at zero to dissipate pore pressures in the core
to allow drainage due to the filter and shell.
5.2.2 Mechanical boundary conditions
With every placed layer, the increase of vertical and
horizontal stresses is given by the weight of the layer,
zz 0.5 * h * and xx 0.5 * zz.
5.2.3 Hydraulic-mechanic coupling
The pore pressure is assumed to be generated by
Skempton’s B coefficient via the water modulus,
Kw (B * n * Kcore)/(1 – B).
5.3
First filling and steady state
Figure 4. Sight of top of the valley, with studied sections.
5.3.1 Hydraulic boundary conditions
The pore pressure is fixed by the value of the hydraulic
load caused by the reservoir filling, Pw (Hw – h) *
w, if Hw h where Hw storage level; h node
level; and w unit weight of water.
Figure 5. Section right bank – left bank.
Figure 6. Boundary conditions to construction.
104
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-13.qxd 08/11/2003 20:24 PM Page 105
Two storage versus time curves are used: one for
the downstream shell and one for the upstream storage
(Fig. 7).
5.3.2 Mechanical boundary conditions
On the upstream and downstream faces of the dam,
mechanical pressure caused by the impounding is
modeled by normal stresses on the dam faces. The
specific weights of materials are modified when they
are saturated.
1000
980
2000
1999
1998
1997
1996
1995
1994
1993
1992
1991
1990
1989
1988
1987
1986
1985
1984
1983
1982
1981
1980
1979
First filling dates
6 COMPARISON OF 2D AND 3D MODELS
In this section, the results of the model analyses are
compared to measurements at the end of construction
(Fig. 9).
6.1
2D Model
The calculated stresses are too high at the base of
the core compared to the measured ones. A parametric
study of mechanical properties could not solve the discrepancy. It is speculated that the arching effect unloads
the central section and transfers stresses to the banks.
No realistic calculation could be reached using the 2D
model.
cote (m)
960
940
6.2
920
For this model, the calculated settlements in the core
are in good agreement with the measured ones. The
stresses are smaller than the 2D problem, because of
arching. Nevertheless, the deformation of the shells is
still larger than measured. A parametric study of core
and shell moduli was undertaken to reconcile the
discrepancy.
900
880
upstream
downstream
Figure 7. Curves of upstream and downstream fillings.
3D Model
7 PARAMETRIC STUDY OF THE 3D MODEL
DURING CONSTRUCTION
Figure 8. Boundary conditions during the filling.
Several simulations were studied varying the
mechanical properties (moduli) and flow parameters
(saturation). The initial and final mechanical properties are presented in Table 1. A comparison of results
is made at the end of construction.
Figure 9. Comparison between effective stresses with 2D and 3D models.
105
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-13.qxd 08/11/2003 20:24 PM Page 106
7.1
Displacements
Vertical and horizontal displacements are in good agreement with the measurements. The shell modulus shown
gave results that agreed with the deformations measured
downstream, but decreased the core settlements. The
simulation carried out using a decreased modulus of the
core gave the closest values to the measurements.
7.2
Pore pressures
Pore pressures are very low, like the measurements at
the end of construction (Fig. 10). The clay compaction
Table 1. Initial and final mechanical properties.
Material
C
(kPa)
Phi
(°)
E
(Mpa)
v
B
Core initial
Core final
Shell initial
Shell final
20
20
0
0
25
25
40
40
40
20
120
240
0.35
0.35
0.30
0.30
0.6
0.1
–
–
carried out (dry or very dry of optimum) results in
very low pore pressure generation. This lowers the risk
of hydraulic fracturing during first filling.
7.3
The results that best agree with cell measurements
were obtained with a relatively high shell modulus,
and low core modulus. On the other hand, the calculated total vertical stresses near the left bank were
far from the measured stresses. This phenomenon is
not clearly understood. The most important conclusion is that hydraulic fracture was not indicated in any
calculated case, even though the base of the core
is heavily unloaded in the narrow canyon (Fig. 11
Area 1). The load transfer is clearly observed in
the core section parallel to the dam crest (Fig. 11
Area 2).
After completing the parametric study at the end of
construction, calculation was continued for the first
filling case.
Figure 10. Pore pressure at the end of construction.
Figure 11. Vertical effective stresses at the end of construction.
106
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
Stresses
09069-13.qxd 08/11/2003 20:24 PM Page 107
8 3D MODEL FOR FIRST FILLING CASE
8.1
Pore pressures
The pore pressures calculated in the core at the level
925 are close to the measured values (Fig. 13). It
was difficult to get agreement between the measured
and calculated values below this level. Variations of
permeability in the core were not represented in the
modeling. Spatial variation of the hydraulic properties
in the core may improve the correlation, but this was
not done.
8.2
Stresses
Generally the shapes of the calculated and monitored
stresses versus time were similar. The construction
phase is apparent in the plots, then the filling of the
two reservoirs, and finally a steady state was reached
(Fig. 14).
The values from the simulation and from measurements are rather close until the date 1981 for the
cells to the level 925, and 1983 for the cells of level
905 (Figs. 15 & 16). These dates correspond to the
sudden drop of measured stress values. Then the simulations and measured values disagree. It is speculated that this phenomenon was induced by water
infiltration at the cell level, collapsing the clay and
lowering the stress. This phenomenon should be integrated in the future and modeled by the clay collapse
after wetting.
Some hydraulic fracturing can be observed in the
upstream shell, but this is not of concern. The shell is
drained and the water tightness of the core is not
altered.
Figure 12. Pore pressures at steady state.
420
380
340
300
260
220
180
140
100
60
20
-20
01/01/76
31/12/77
First filling
01/01/80
31/12/81
01/01/84
31/12/85
125-E11-905
125-E15-914
125-E17-925
01/01/88
31/12/89
01/01/92
E11-calcul elastique
E15-calcul elastique
E17-calcul elastique
Figure 13. Pore pressures in kPa in the core (calculation: full features).
107
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
31/12/93
01/01/96
31/12/97
01/01/00
31/12/01
09069-13.qxd 08/11/2003 20:24 PM Page 108
Figure 14. Vertical effective stresses during steady state.
10e2 kPa
11
10e2 kPa
10
10
9
9
8
8
7
7
6
6
5
5
4
4
3
2
3
1
1
126-T2-905
T2 Szz calcul
126-T3-905
127-T5-905
126-T4-905
T4 Srd-rg calcul
126-T6-905
T6 Sami-avl calcul
Figure 15. Comparison between measured and calculated
total stresses at level 905.
125-T7-925
125.5 T8-925
124.5-T9-925
126-T10-925
T7 Szz calcul
T8 Srd-rg calcul
T9 Samt-avl cal cul
125-T11-925
31/12/01
01/01/00
31/12/97
01/01/96
31/12/93
01/01/92
31/12/89
01/01/88
31/12/85
01/01/84
31/12/81
01/01/80
01/01/76
31/12/01
01/01/00
31/12/97
01/01/96
31/12/93
01/01/92
31/12/89
01/01/88
31/12/85
01/01/84
31/12/81
01/01/80
-1
31/12/77
0
-1
01/01/76
0
31/12/77
2
Figure 16. Comparison between measured and calculated
total stresses at level 925.
9 CONCLUSION
Detection of hydraulic fracturing in the core is
the objective of the analysis of this zoned dam. The
three-dimensional modeling appears to be the only
way to model the problem. The real geometry of the
foundation has to be carefully modeled to represent
the phenomenon of stresses transferred to the banks
and the unloading of the core in the canyon.
The parametric study of the mechanical properties
of the materials was required to fit the monitoring
data and ensure the accuracy of the analysis. Finally,
according to this calibration, hydraulic fracturing of
the core was not indicated.
REFERENCES
Varona P. 2001. Curso de FLAC3D, Itasca Consultant Spain,
January 15–19, 2001.
Laigle, F. & Boymond, B. 2001. CERN-LHC Project –
Design and excavation of Large-Span Caverns at Point 1,
EDF-CIH France.
108
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-14.qxd 08/11/2003 20:25 PM Page 109
FLAC and Numerical Modeling in Geomechanics, Brummer et al. (eds)
© 2003 Swets & Zeitlinger, Lisse, ISBN 90 5809 581 9
Mesh geometry effects on slope stability calculation by FLAC strength
reduction method – linear and non-linear failure criteria
R. Shukha & R. Baker
Faculty of Civil and Environmental Engineering, Technion I.I.T., Haifa, Israel
ABSTRACT: Results of FLAC’s strength reduction technique are compared with conventional limit equilibrium analysis for both linear and non-linear strength criteria. The comparison includes both safety factors and
failure modes (critical slip surfaces and normal stress functions). The collection of FLAC’s plastic points is not
a reasonable criterion for estimating the potential failure zone and it is necessary to establish this zone by postprocessing FLAC’s results. It is shown that failure modes implied by FLAC analysis are sensitive to mesh geometry effects and, in order to obtain reasonable results, it is necessary to use meshes consisting of nearly square
elements. Safety factors are much less sensitive to mesh geometry effects than failure modes. FLAC’s mesh sensitivity is more pronounced for non-linear failure criterion than in the linear case. Using acceptable mesh geometry, FLAC’s strength reduction technique and limit equilibrium procedures yield comparable results (failure
modes and safety factors) for both linear and non-linear strength criteria. Engineering implications of linear and
non-linear failure criteria in the context of slope stability analysis are presented and discussed. It is shown that
equally valid interpretations of the same experimental information may, under certain conditions (e.g. steep
slopes), lead to very different engineering implications. Under such conditions the choice between alternative
strength models must be based on the practical implications of these laws.
1 INTRODUCTION
Strm(f) which is defined as:
Almost all practical slope stability calculations quantify the stability of a given slope using the notion of
safety factor with respect to shear strength. This quantity is commonly defined as a reduction constant by
which the available shear strength function of the soil
needs to be factored down in order to bring the slope
to failure. In conventional limit equilibrium (L-E)
calculations, safety factors are associated with “test
bodies” and it is necessary to search for the critical
test body that yields the minimal safety factor for a
given slope. Incorporation of safety factor, with respect
to strength, in a general continuum mechanics framework results in a class of slope stability procedures
known as strength reduction (S-R) methods. This
approach was used as early as 1975 by Zienkiewics
et al. (1975) and has since been applied by Naylor
(1982), Donald & Giam (1988), Matsui & San (1992),
Ugai (1989), Ugai & Leshchinsky (1995) and others.
2 COMPARISON OF THE L-E AND
S-R FRAMEWORKS
Both L-E and S-R techniques analyze an equivalent
material characterized by a mobilized strength function
(1)
where f is the normal (in general effective) stress
acting at failure on the failure plane, Str(f) is the
strength function (Mohr envelope) of the material,
and F is the slope’s safety factor.
Equation 1 is used by both the S-R technique and
conventional L-E procedures. However, the conceptual
framework employed in these two approaches is not
equivalent. In particular:
1. Application of the S-R technique requires complete specification of the soil’s constitutive relation
while the L-E framework does not depend on
deformation parameters.
2. L-E procedures include a minimization stage, which
establishes the critical slip surface and its associated minimal safety factor. In S-R techniques on
the other hand, existence of a unique slip surfaces
is not a priori assumed, but such a surface can be
established after completion of the basic analysis.
3. S-R methods define failure at a point (element).
However yielding of a single element does not
109
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-14.qxd 08/11/2003 20:25 PM Page 110
mean global failure of the slope. The local definition of failure embedded in all S-R methods is
probably the main disadvantage of these procedures
compared with the inherently global L-E approach.
The L-E and S-R techniques have their strengths
and weaknesses. A number of previous studies (e.g.
Naylor 1982, Dawson et al. 1999, Griffith & Lane
1999) showed that both methods yield approximately
the same safety factors. The present work extends this
comparison to critical slip surfaces and distribution of
normal stress acting along such surfaces.
Figure 1. Experimental strength functions for compacted
Israeli clays.
3 STRENGTH FUNCTIONS FOR A GIVEN
STATE OF INFORMATION
Most practical slope stability calculations are based on
the linear Mohr-Coulomb (M-C) strength function:
(2)
where {c, } are the conventional M-C strength
parameters cohesion and angle of internal friction
respectively. Experimental studies by Penman (1953),
Bishop et al. (1965), Day & Axten (1989), and
Maximovic (1989) have indicated that actual failure
envelopes of most soils are not linear, particularly in
range of small normal stresses. There exists a number
of studies incorporating non-linear (N-L) failure criteria in conventional L-E calculations such as Maximovic
(1979), Charles & Soares (1984), and Perry (1994).
The N-L strength function used in most of these studies is the Mohr form of the Hoek-Brown (H-B) empirical failure criterion (Hoek & Brown 1980). This
criterion can be written as:
(3)
where Pa stands for atmospheric pressure and {A,n,T}
are non-dimensional strength parameters. This nondimensional form was introduced by Jiang et al.
(2003), where it was shown that the parameters {A,n,T}
must satisfy the requirements {A 0, 1⁄2 n 1,
T 0} and T represents a non-dimensional tensile
strength. Baker (2003a) demonstrated that Equation 3
provides a reasonable representation of experimental results for a wide range of different geological
materials.
It is important to realize that a physically significant assessment of the effect of strength functions
non-linearity of the results of slope stability calculations is possible only if the linear and N-L strength
functions are fitted to the same data set. Stated differently, in order to asses the effect of different strength
functions (strength models) on results of slope stability calculations it is necessary to consider a given
state of experimental information (given data set).
Jiang et al. (2003) and Baker (2003b) performed such
studies using approximate L-E procedures and
showed that, under certain conditions, the strength
functions non-linearity may have very significant
effect on results of slope stability calculations. One of
the purposes of the present work is to study the same
effect using a FLAC based S-R slope stability analysis. The points in Figure 1 show results of 103 consolidated undrained triaxial tests with pore pressure.
Measurements were performed on compacted Israeli
clays. These tests were done as part of routine testing programs for design of small water reservoirs.
Additional information about the clays and tests is
given by Frydman & Samoocha (1984). The lines in
Figure 1 are the M-C and H-B strength envelopes fitted to the experimental data set, using the iterative
least square procedure described by Baker (2003a).
The fitting process resulted in 25°, c 11.7 kPa,
SOSMC 31908 kPa2 and A 0.58, n 0.86, T 0,
SOSHB 30263 kPa2, where SOSMC and SOSHB are
the sum of squares associated with the M-C and H-B
models respectively.
The following comments are relevant with respect
to the above results:
1. T 0 is a result of the estimation process, not an
a priori assumption. This result implies that the
optimal H-B model represents a zero tensile
strength material. The M-C model on the other
hand predicts a non-negligible tensile strength of
t c/Tan() 25 kPa.
2. The sum of squares associated with the M-C and
H-B models are nearly equal SOSHB/SOSMC 0.95. This result implies that the M-C and H-B
models provide equally valid descriptions of the
experimental information (data points).
3. Inspection of Figure 1 shows that the M-C and
N-L criteria predicts almost identical strength values in the range of experimental normal stresses
110
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-14.qxd 08/11/2003 20:25 PM Page 111
33.4 f 351.2 kPa. The predictions of these
models differ from each other only at very low and
very high normal stresses. In both of these ranges
the H-B model predicts smaller strength values
than M-C (convexity of the H-B criterion guaranties that this will always be the case). In fact the
main practical significance of the H-B criterion is
that it delivers conservative (compared with M-C)
strength estimates in normal stress ranges in which
there are no direct experimental information.
4
FLAC IMPLEMENTATION OF
H-B CRITERION
FLAC has a feature allowing a direct use of the H-B
criterion in slope stability calculations. However in
FLAC this criterion is formulated in the principle
stress space and for the present purpose it is convenient to use the Mohr form of this criterion (Eq. 3).
Formally this is done by considering a M-C model
with the following stress dependent tangential
strength parameters t and ct:
(4.1)
Figure 2. FLAC results for the M-C criterion. (a) Square
mesh. (b) Inclined mesh.
(4.2)
Equations 4.1 & 4.2 were programmed as a simple
FISH routine, and using the “whilestepping” option
embedded in FLAC, this routine updates the tangential M-C parameters in each FLAC’s time step. The S-R
technique was applied using the definition of mobilized strength function in Equation 1, i.e. FLAC was
run with a sequence of progressively increasing trial
safety factors until the slope failed, (i.e. until FLAC
fails to converge to a static equilibrium configuration). Attempting to apply FLAC’s SOLVE FOS command with the mobilized H-B criterion we have
encountered convergence difficulties, and all the following results were obtained by manual change of trial
safety factors.
5 EFFECT OF MASH GEOMETRY ON
RESULTS OF THE S-R TECHNIQUE
The calculation framework presented above was
applied to a simple homogeneous slope stability problem without pore pressure or external loads. The
slope is defined by an inclination 30°, slope
height H 6 m, unit weight 18 kN/m3, and the two
strength functions shown in Figure 1. Figures 2a, b
show FLAC results the for the M-C criterion using
two different mesh geometries; a mesh including
essentially square elements (Fig. 2a), and the inclined
Figure 3. FLAC results for the H-B criterion. (a) Square
mesh. (b) Inclined mesh.
mesh shown in Figure 2b. Figures 3a, b show the corresponding results for the H-B model.
The following observations are relevant with
respect to the results in Figures 2 & 3:
1. The H-B model resulted in significantly lower safety
factors then the linear M-C model (FHB 1.4
111
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-14.qxd 08/11/2003 20:25 PM Page 112
compared with FMC 1.95). The previous discussion showed that these two strength models are
supported equally well by the available experimental information (Fig. 1). Faced with a situation in
which two material models are equally justified by
the data, the choice between these models must be
based on their engineering consequences. In the
present problem the H-B model delivered smaller
safety factors than M-C and this model should be
used in order to ensure a safe design.
2. For the M-C criterion the two meshes result in practically the same safety factor. The corresponding
difference for the H-B model (F 0.1) is small,
but it is not negligible.
3. Figures 2 & 3 show that the square and inclined
meshes resulted in very different failure mechanisms. This difference is seen in terms of both distribution of FLAC’s plastic point, and contours of
shear strain increments. Plastic points identify elements, which are at yield (failure). However yielding of a particular element does not imply that the
slope as a whole is at failure. Consequently, the
collection of FLAC’s plastic points does not provide a clear indication of the global failure mechanism. In particular, some of the plastic points for
the inclined mesh are located deep in the interior of
the slope, and they are obviously not relevant for the
purpose of identifying the slope’s failure mechanism. The distribution of plastic points and shear
strain increments in the square meshes appears to
indicate that very large area of the slope is in a
state of simultaneous failure. The inclined meshes
imply failure mechanisms of the type postulated in
conventional L-E calculations; namely an essentially
rigid body sliding along a narrow transition zone.
It is noted however that the “critical slip surface”
implied by Figure 3b emerges above the toe of the
slope. From a L-E perspective, such a surface cannot be critical, corresponding essentially to a slope
with a “reduced height”. Yet, this “unreasonable”
slip surface is associated with a smaller safety factor than the reasonable (but ill-defined) critical slip
surface in Figure 3a.
6 FAILURE MODES IMPLIED BY FLAC’S
S-R TECHNIQUE
Following a FLAC run, the state of stress (Mohr circles)
is known at each element of the mesh. The state of
stress in failed elements satisfies Equation 1, and such
stress states are represented by Mohr circles, which
are tangential to the mobilized strength envelope. The
tangency requirement has to be satisfied with a certain tolerance in order to prevent exclusion of all elements. Each tangential Mohr circle is associated with
a certain mesh element, which can be identified; and
the collection of all such elements represents a L-E
definition of the critical slip surface function implied
by the S-R technique. Mesh elements defined by the
above process are shown as the open circles in
Figures 2 & 3, and critical slip surfaces defined by
this process are shown as the heavy dashed lines in
those figures. In principle, the above identification of
failed elements is not different from FLAC’s definition of plastic points. Nevertheless the set of failed
elements shown in Figure 3b is quite different from
the set of FLAC plastic points. The source of this
difference is probably related to an internal programming detail in the FLAC program. More detailed
investigation appears to indicate that the internal
FLAC criterion used for definition of plastic points
employs a too-large tolerance in the definition of
these points, resulting therefore with inclusion of elements which are not really at failure. Controlling the
accuracy with which the tangency requirement is
enforced provides a convenient numerical mechanism
eliminating at least some failed elements, which are
not relevant for definition of global slope failure (critical slip surface).
The following comments are relevant with respect
to the process of identifying failed elements:
1. Inferred critical slip surfaces defined by the above
process are consistent with the shear strain increment contours shown in Figures 2 & 3, but they provide a clearer definition of the global failure mode.
2. In some cases the set of failed elements includes a
group of elements located in the vicinity of the
high entry point of the critical slip surface. This
group represents elements failing in tension rather
than shear. The L-E critical slip surface is not well
defined in such zones.
3. Tangency points between Mohr circles and the
mobilized strength envelope define the normal
stress acting on the critical slip surface passing
through a given element. Consequently, the above
process results with L-E definition of both critical
slip surfaces and normal stress functions.
The inferred L-E critical slip surfaces and normal
stress functions resulting from the above process are
shown in Figures 4 & 5, which correspond to Figures
2 & 3 respectively. In those figures we have superimposed also critical slip surfaces and normal stresses
functions resulting from the following approximate
L-E analyses:
1. Simplified Bishop’s method. The original formulation of this procedure was based on the linear M-C
strength functions. For the present purpose we
have modified this classical procedure incorporating in it also the H-B criterion.
2. The local linear approximation (LLA) technique
presented by Baker (2003b). This approximation is
112
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-14.qxd 08/11/2003 20:25 PM Page 113
based on classical Taylor analysis in which the effect
of strength functions non-linearity is accounted for
by an iterative procedure which utilizes Janbu’s
approximation (Janbu 1957) of the normal stress
function. When applied to M-C material the LLA
technique is identical to Taylor’s analysis.
It is noted that both of the above L-E procedures
are based on the a priori assumption that critical slip
surfaces can be approximated by a circular arc. Critical
slip surface inferred based on FLAC’s results do not
include such a restriction. The following comments
are relevant with respect to Figures 4 & 5:
Figure 4. Normalized critical slip surfaces and normal
stress functions for the M-C criterion. (a) Square mesh.
(b) Inclined mesh.
Figure 5. Normalized critical slip surfaces and normal
stress functions for the H-B criterion. (a) Square mesh.
(b) Inclined mesh.
1. Using the square mesh; FLAC’s S-R technique
results with safety factors which are very close to
those based on both Bishop’s analysis and the LLA
technique. Critical slip surfaces and normal stress
functions inferred based on the S-R technique are
similar but not identical, to the corresponding L-E
functions. The difference between the critical slip
surfaces inferred based on FLAC analysis and the
corresponding L-E surfaces is mainly due to the
circular arc restriction used in the present approximate L-E methods. It is frequently stated that the
circular arc restriction provides a reasonable approximation for homogeneous slopes. The results in
Figures 4 & 5 do not support such a far-reaching
conclusion. The variational formulation of L-E
problems (Baker & Garber 1978, Baker 2003c)
provides a means of avoiding a priori assumptions
with respect to the form of critical slip surfaces. Such
advanced L-E procedures are not widely used, and
they are not considered in the present work. Both
Janbu’s normal stress approximation and the normal
stress function implied by Bishop’s analysis appear
to be consistent with FLAC’s results. Those observations are valid for both M-C and H-B criteria.
2. Using the inclined mesh; there is a small but not
negligible difference between safety factors based
on the S-R technique and L-E safety factors.
However the failure mechanisms implied by these
two approaches are significantly different. Figure 6
illustrates the extent of FLAC’s mesh sensitivity
with respect to inferred critical slip surfaces and
normal stress functions for the case of H-B failure
criterion. It is noted again that the inclined mesh
resulted with an unreasonable critical slip surface
emerging above the toe, while the squared mesh is
consistent with the L-E based argument that slip
surfaces emerging about the toe correspond in effect
to a slope having a reduced height, and such surfaces cannot be critical.
Using an inclined mesh the discrepancies between
results based on S-R and L-E techniques are more
pronounced for the H-B model than the M-C criterion, but they exist in both cases. Based on the above
113
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-14.qxd 08/11/2003 20:25 PM Page 114
the H-B strength law is significantly smaller than the
safety factor FMC 1.96 associated with the M-C criterion. This result depends however on the slope stability problem under consideration and in the following
section we establish a more general perspective for
investigating the effect of strength functions on results
of slope stability calculations.
7 THE CRITICAL HEIGHT FUNCTION
Figure 6. Mesh effect on inferred critical slip surfaces
implied by the S-R technique (H-B failure criterion).
Figure 7. Critical failure mechanisms associated with the
M-C and H-B criteria.
discussion it is clear that FLAC results are sensitive to
mesh geometries. Using a square mesh yields more
consistent results than use of the inclined mesh. This
is not really surprising; some elements in the inclined
mesh have relatively high aspect ratios, and it is well
known that results based on such meshes should be
viewed with suspicion. Safety factors are relatively
insensitive to mesh geometries. However mesh geometries have quite a significant effect on failure mechanisms. In the following we restrict attention to results
obtained using only square meshes of the type shown
in Figure 2a.
Figure 7 compares FLAC’s failure mechanisms
(critical slip surfaces and normal stress functions)
obtained for the M-C and H-B strength functions in
Figure 1. It is seen that the critical slip surface associated with the H-B strength function is shallower than
the one associated with the M-C criterion. As a result,
normal stresses acting on the H-B slip surface are
smaller than those operating along the M-C slip surface. Inspection of Figure 1 shows that, in the range
of small normal stresses, the H-B criterion predicts
smaller strength than M-C. It is not surprising therefore that the safety factor FHB 1.45 obtained using
Safety factors are practically useful abstractions.
However, the physical significance of results obtained
by S-R or conventional L-E techniques is clear only at
failure when F 1. At any other value of F such calculations deal with failure conditions of an equivalent
material with a reduced strength, rather than the
actual physical problem. In order to avoid this conceptual difficulty it is convenient to study the effect of
strength criteria on results of slope stability calculations in terms of critical heights rather than safety
factors. The critical height of a slope is defined as a
height for which the minimal safety factor is equal to
one. Critical heights depend on the inclination of the
slope, i.e. Hcr Hcr(). Figure 8 show critical height
functions resulting from following analyses:
1. FLAC S-R technique based on the H-B criterion
(triangles).
2. Bishop analysis based on the H-B criterion (crosses).
3. The LLA technique (Baker 2003b) (solid heavy
line) based on the H-B criterion.
4. FLAC S-R technique based on M-C criterion.
(open circles).
5. The LLA technique based on the linear M-C criterion (light solid line). It is noted that for homogeneous slopes and a M-C strength criterion this
technique is reduced to classical Taylor analysis.
It is noted that both the H-B and M-C criteria are fitted to the same experimental data set obtained for
compacted Israeli clays (Fig. 1), and both models represent this data equally well (sum of squares ratio is
equal to 0.95).
The following comments are relevant with respect
to the results in Figure 8:
1. In the linear M-C framework the safety factor of
slopes with is always larger than 1.
Consequently a critical height function based on
this criterion is asymptotic to a vertical line located
at . It can be verified that the non-linear H-B
criterion implies finite critical heights for all nonzero slope inclinations.
2. Using the linear M-C criterion corresponding to the
data set in Figure 1, Taylor’s analysis shows the critical height of a vertical slope is 3.9 m. On the other
hand, analysis based on the H-B criterion fitted to
the same data set implies that slopes steeper than
114
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-14.qxd 08/11/2003 20:25 PM Page 115
8. It is important to realize that the critical height
functions shown in Figure 8 are relevant for the
compacted Israeli clays data set (Fig. 1), and this
figure does not represent a general relations.
However, qualitatively similar results were obtained
also for a number of other data sets.
8 SUMMARY AND CONCLUSIONS
Figure 8. Critical slope heights for compacted Israeli clays.
3.
4.
5.
6.
7.
approximately 55° are not stable. The very significant difference between prediction of the two models illustrate very clearly the importance of using
non-linear failure criteria in stability calculations
of steep slopes.
Recalling that the M-C and H-B failure criteria
provide equally valid descriptions of the compacted
Israeli clay’s data set, the practical implications
of Figure 8 are worrying. The figure shows that
equally valid interpretations of the same experimental information may under certain conditions
lead to diverging practical implications (i.e. HCrHB
( 60°) → 0, HCrMC ( 90°) 3.9 m.
The physical basis of the above result is related to
the following observations:
a) Critical slip surfaces for steep slopes are
shallow, resulting therefore with small normal
stresses acting on this surface.
b) A T 0 H-B model predicts significantly
smaller shear strength at small normal stresses
than a M-C criterion with a non-zero cohesion.
There is a range of slope inclinations
(28° 34°) in which the critical height predicted by the M-C criterion is slightly larger then
those predicted on the basis of the H-B law. The
physical reason for this behavior is discussed by
Baker (2003b).
The open circles in Figure 8 show results of FLAC
analysis based on the M-C criterion. Those results
are almost identical with results based on the classical Taylor analysis (light solid line).
For the non-linear H-B criterion, the critical height
functions based on Bishop analysis, and FLAC’s S-R
technique are practically identical with results
based on Baker’s (2003b) L.L.A. technique. This
observation supports the validities of all three calculation methods. It is noted that Bishop’s analysis
is restricted to circular slip surfaces and it is not
expected to yield good results in nonhomogeneous problems. Both FLAC and LLA can
be applied to non-homogeneous problems.
Two general approaches (FLAC’s strength reduction
technique and conventional limit equilibrium calculations) for analysis of slope stability are discussed and
compared. The present work extends previous presentations on this subject in number of respects:
1. The comparison includes failure mechanisms (critical slip surfaces and normal stress functions) in
addition to safety factors.
2. The comparison is done for both the linear MohrCoulomb failure criterion and the non-linear Hoek
and Brown strength function.
Mesh geometry effects on FLAC’s results are presented and discussed. It is shown that a mesh consisting of essentially square elements results in more
consistent results than meshes including relatively
slender elements. Safety factors are relatively insensitive to mesh geometries, however failure mechanisms
depend very strongly on mesh geometry, and using
a mesh which includes slender elements may lead
to wrong conclusions with respect to critical slip
surfaces and normal stress functions inferred on the
basis of FLAC’s S-R technique. FLAC’s mesh sensitivity is more pronounced for non-linear strength
functions than in the linear M-C case. It is noted
that FLAC’s plastic points do not provide a reasonable measure of the potential failure zone. A procedure which identifies the critical slip surface based
on FLAC’s calculated stresses is presented and discussed. Considering results obtained using square
meshes, FLAC’s strength reduction technique and
conventional limit equilibrium procedures yield
similar failure mechanisms and safety factors. This
conclusion is valid for both linear and non-linear
failure criteria.
Engineering implications of linear and non-linear
failure criteria in the context of slope stability analysis are presented and discussed. In particular it is
shown that equally valid interpretations of the same
experimental information may under certain conditions (steep slopes) lead to very different engineering implications. Under such conditions the choice
between strength functions must be based on the
practical implications of these laws, which in most
cases means using the Hoek-Brown criterion rather
than the conventional linear Mohr-Coulomb strength
function.
115
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-14.qxd 08/11/2003 20:25 PM Page 116
REFERENCES
Baker, R. & Garber, M. 1978. Theoretical analysis of the stability of slopes. Geotechnique, 28(4): 395–411.
Baker, R. 2003a. Inter-Relation between experimental and
computational aspects of slope stability analysis. Inter.
Jour. Numer. Anal. Meth. Geamech. 27(5): 379–401.
Baker, R. 2003b. Non-linear strength envelopes based on triaxial data. Accepted for publication in J. Geotech. And
Geoenvir Engrg., ASCE.
Baker, R. 2003c. Sufficient conditions for existence of physically significant solutions in limiting equilibrium slope
stability analysis. Accepted for publication in Inter. Jour.
of Solids and structures.
Bishop, A.W., Webb, D.L. & Lewin, P.I. 1965. Undisturbed
samples of London clay from the Ashford common shaft:
strength-effective normal stress relationship. Geotechnique, 15(1): 1–31.
Charles, J.A. & Soares, M.M. 1984. The stability of slopes
with nonlinear failure criterion. Cand. Geoth. J., 21(3):
397–406.
Day, R.W. & Axten, G.W. 1989. Surficial stability of compacted clay slopes. J. Geoth. Eng. ASCE, 115(4): 577–580.
Dawson, B.M., Roth, W.H. & Drescher, A. 1999. Slope stability factors of safety by strength reduction. Geotechnique,
49(6): 835–840.
Donald, I.B. & Giam, S.K. 1988. Application of nodal displacement method to slope stability analysis. Proc. 5th
Australia-New Zealand Conf. on Geomech., Sydney,
Australia, 456–460.
Frydman, S. & Samoocha, Y. 1984. Laboratory studies on
Israeli clays for reservoir embankment design. Proc. 5th
Inter. Conf. on Expansive soils, Adelaide, South
Australia, 94–98.
Griffith, D.V. & Lane, P.A. 1999. Slope Stability analysis by
finite elements. Geotechnique, 49(3): 387–403.
Hoek, E. & Brown, E.T. 1980. Empirical strength criterion
for rock masses. ASCE Jour. Geotech. Eng., 106(9):
1013–1035.
Jiang, J.C., Baker, R. & Yamagami, T. 2003. The effect of
strength envelope nonlinearity on slope stability computations. Can. Geoteh. J., 40(2): 308–325.
Matsui, T. & San, K.C. 1992. Finite element slope stability
analysis by shear reduction technique. Soils and
Foundations, 32(1): 59–70.
Maximovic, M. 1979. Limit equilibrium for non-linear failure envelope and arbitrary slip surface. Proc. 3rd Intr.
Conf. on Numerical Methods in Geomechanics, 769–777.
Maximovic, M. 1989. Nonlinear failure criterion for soils.
J. Geoth. Eng. ASCE, 115(4): 581–586.
Naylor, D.J. 1962. Finite element and slope stability. Nume,
Meth. un Geomech., Proc. NATO advanced study institute.
Lisbon, Portugal, 229–244.
Penman, A. 1953. Shear characteristics of saturated silt in
triaxial compression. Geotechnique. 15(1): 79–93.
Perry, J.A. 1994. A technique for defining non-linear shear
strength envelopes and their incorporation in slope stability method of analysis. Quart. J. of Eng. Geology, 27(5):
231–241.
Ugai, K. 1989. A method of calculation of total factor of
safety slopes by elasto-plastic FEM. Soils and Foundations,
29(2): 190–195.
Ugai, K. & Leshchinsky, D. 1995. Three-dimensional limit
equilibrium and finite element analyses: a comparison of
results, Soils and Foundations, 35(4): 1–7.
Zienkiewicz, O.C., Humpheson, C. & Lewis, R.W. 1975.
Associated and non-associated visco-plasticity and plasticity in soil mechanics. Geotechnique, 25(4): 671–689.
116
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-15.qxd 08/11/2003 20:25 PM Page 117
FLAC and Numerical Modeling in Geomechanics, Brummer et al. (eds)
© 2003 Swets & Zeitlinger, Lisse, ISBN 90 5809 581 9
3D slope stability analysis at Boinás East gold mine
A. Varela Suárez & L.I. Alonso González
Río Narcea Gold Mines, S.A., Belmonte de Miranda, Principado de Asturias, Spain
ABSTRACT: The Boinás East open pit mine has been exploited by the gold producer Río Narcea Gold Mines
in Northwest of Spain. Considering the influence of the radius of curvature on the factor of safety for slope
angle, and taking into account that a small increase in the overall angle will result in a very high increment in
the total amount of the ore mined, the slope stability analysis was made using the finite difference code FLAC3D
to calculate the factor of safety by reducing the rock shear strength. Due to the existing complicated geology
and the complexity of the 3D geometrical modeling, a “FISH routine” was used to import the block model of
the mine into the FLAC3D program. This block model is the database commonly used in the mine works and was
generated with Datamine. This method is a very good tool to generate a complex model in FLAC3D.
1 INTRODUCTION
Río Narcea Gold Mines has been operating from
1997 the gold deposit El Valle-Boinás, located in the
Northwest of the Iberian Peninsula, within the wellknown Rio Narcea Gold Belt (Fig. 1).
The deposit is in the environs of the town of
Boinás, Belmonte de Miranda, in the Principality of
Asturias. It’s formed by five separated bodies located
around a granitic stock. The mineralization consists
of various skarn types and zones with silicifications
and significant epithermal oxidation.
Of these five ore bodies, three have been operated
(El Valle, Boinás East and Boinás west) by open pit
Figure 1. 3D diagram of E1 Valle-Boinás deposit.
mining techniques, being at the present time solely in
production the deposit of El Valle. The present article
tries to develop the methodology used for the design
of stable slopes in the deposit of Boinás East, doing
analysis of stability by means of FLAC3D software.
2 SITE GEOLOGY
The Rio Narcea Gold Belt structure of 17 km in length
has an approximate direction N 35° E and includes, in
addition to the mentioned deposit Valle-Boinás, at least
five other gold mineralizations, some of them widely
operated during the rule of the Roman Empire.
Geologically the gold belt consists of an anticline
of Hercynian age, in the core of which there are the
carbonate materials of the Láncara Formation (Middle
Cambrian), above which are shale and sandstone of the
Oville Formation (Middle-Upper Cambrian). Gold
mineralization was initially deposited as calcic and
magnesic copper-gold skarns at the contact between
the Boinas granodiorite and limestone and dolomite
of the Lancara Formation (Martin-Izard et al. 1998,
Cepedal 2001).
The auriferous mineralization mainly occurred during the phase of retro-gradation of the metamorphic
process, to temperatures between 450°C and 250°C,
separated in two stages (Cepedal 1998, 2001). During
the Lower Permian, after an important dismantling of
the hercynic relief, takes place the location of subvolcanic and porphyritic dikes that originate hydrothermal
alterations with important silicification of pre-existing
117
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-15.qxd 08/11/2003 20:25 PM Page 118
Figure 2. Geological scheme of the Rio Narcea Gold Belt.
rocks, to temperatures between 150°C and 250°C and
smaller pressure of 0.2 kbar. This process gives rise to
the formation of oxidized and very brecciated materials, with bad geotechnical quality and that approximately constitute 90% of the operated material in the
open pits.
The gold mineralization remained hidden by Tertiary
lacustrine deposits, which as well were partially hidden
by Alpine thrusts that placed an important repetition
of limestone of the Láncara Formation above the
Tertiary and the sandstone of the Oville Formation.
Figure 1 shows a scheme of the zone of the deposit El
Valle-Boinás and Figure 2 a scheme of the whole Rio
Narcea Gold Belt.
3 PRELIMINARY ANALYSIS
From the geotechnical data of the different materials
taken in from the geological exploration holes, the
shear strength of the different lithologies were determined following the Bieniawski (1989) classification
and the Hoek-Brown 99 methodology.
With the obtained values SRK Ltd. carried out the
feasibility study in October 1996, updating it in 1999.
Table 1. Feasibility study data.
Factor of safety
55
50
45
0.91
1.03
1.15
The analyses were carried out using the XSTABL
software over sections with simplified geology and
considering different overall slope angles. Considering
the slope totally drained, 330 meters of vertical height,
the Bishop’s method and circular surfaces of failure,
were obtained the factor of safety showed in the Table 1
(SRK 1996, 1999).
The geology and the rock mass properties used by
SRK in their analysis are summarized in Table 2.
4 NUMERICAL MODELING WITH FLAC
The holes drilled during the year 1998 defined a new
mineralized zone amenable to extraction by open pit
118
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
Overall slope angle(°)
09069-15.qxd 08/11/2003 20:25 PM Page 119
Table 2. Rock mass properties in the SRK model.
Lithology
Good Quality Lancara Limestone
Fair Quality Lancara Limestone
Lower Oville Sandstone
Fair Quality Granite
Ore (MIN)
Marble
Table 3. Factor of safety obtained with FLAC.
Cohesion Density
(°) (kPa)
(t/m3)
37
31
33
34
32
32
293
258
275
290
265
265
2.70
2.70
2.50
2.60
2.50
2.70
Slope angle
Phase
Type of
analysis
Upper*
Lower*
Factor of
safety
Final
Final
1
Plane
Axisymmetric
Plane
65
65
50
45
45
50
1.00–1.05
1.65–1.70
1.20–1.30
* Upper/lower means above or below the main Alpine thrust.
Table 4. Rock-mass properties.
Lithology
K
G
Cohesion Density
(GPa) (GPa) (°) (kPa)
(t/m3)
Upper Sandstone
Upper dolomite
Lower Sandstone
Alterd. Granite
Ore (MIN)
Fresh granite
Fresh skarn
Marble
Hornfels
Tertiary
Black skarn
3.75 2.17
7.92 5.09
1.32 0.75
1.17 0.66
1.11 0.62
16.99 11.52
10.63 6.79
2.45 1.41
23.24 16.39
4.64 2.96
10.63 6.79
49
43
21
20
19
65
56
33
62
38
56
720
1120
270
250
250
4770
2430
500
11330
650
2430
2.65
2.70
2.29
2.28
2.21
2.67
3.17
2.43
2.77
2.25
3.17
Figure 3. Plane-strain and axisymmetric analysis with
FLAC.
provided it would be possible to increase the over all
angle of the East slope of the pit.
In the following paragraph will be described in
detail the stability analysis carried out using more
detailed geological models and two and three dimensional finite-difference programs.
4.1
Preliminary analysis
Considering the effect of the radius of curvature of
the pit in the global stability (Lorig 1999), different
analysis were carried out using the program FLAC
(Itasca 1998).
In collaboration with Itasca Consultores S.L., we
have made different analysis over a representative
section, contemplating plane-strain and axisymmetric
conditions.
In first of them one assumes that the slope extends
indefinitely in the perpendicular direction of the analysis plane and that deformations in the perpendicular
direction of this plane do not exist. This type would be
compatible with the one made in the feasibility study
with the XSTABL software. In the case of axisymmetric analysis one assumes that the slope has truncated
cone form. The graphical representation of both cases
is indicated in Figure 3.
Table 3 shows the factor of safety obtained for the
same section and using the same strength parameters.
In that table it shows also the factor of safety obtained
in a back analysis of the slope already excavated in
the pit as Phase 1. The strength parameters are those
given in Table 4, and the slope was considered to be
fully drained.
The breakage mechanism that takes place is very
similar in both types of analysis. It consists of the
shear failure of the materials located below the main
alpine thrust and tensile failure in the dolomite above
that thrust. In the case of the axisymmetric analysis,
the tensile failure is cushioned, increasing in this way
the factor of safety of the slope.
In following figures show a schematic of the geology (Fig. 4), the failure mechanism in the case of
plane-strain geometry (Fig. 5), and the failure in the
case of axisymmetric analysis (Fig. 6).
Studying at the values of the obtained factors of
safety it is clear that the analyses of three-dimensional
geometry provide higher and more realistic factors of
safety, considering the influence of the radii of curvature previously mentioned. In any case, the axisymmetric considerations are too optimistic, since in the
reality the analyzed topography will not be totally
119
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-15.qxd 08/11/2003 20:26 PM Page 120
was used. This program allows define a more accurate topographical and geological model.
4.2
FLAC3D modeling
Three-dimensional model construction of a geologically complex deposit such as El Valle-Boinás can be
an arduous task. In this case a “FISH routine” was
designed that allows the geological block model to be
imported directly into FLAC3D.
In a first step, using the DATAMINE program, different block models were created deactivating those
blocks located over the topography that we try to analyze. The X, Y and Z coordinate of the center of each
block is exported into a data file, as well as its lithology.
In our particular case the mining blocks were 4
meters side bricks, that were rebuilt to 16 meters side
bricks, with the intention of making the model usable.
The blocks thus obtained were placed in the own local
coordinates, and more blocks were defined around the
model in order to avoid that the artificial contour condition do not affect the results of the stability analysis
(Lorig et al 2000). Figure 7 shows the geology on the
surface of the final pit plotting the DATAMINE block
model, and the Figure 8 shows the geological model
loaded into FLAC3D.
The FISH routine was used to generate the 16
meter side blocks using the coordinates of the center
of the blocks taken from DATAMINE (file
“BE16X16A.txt”). The first line of this file has the
identification of the rest of the parameters, and it will
not be imported to the FLAC3D program. The whole
routine is shown in the appendix.
Figure 4. Summarized geology.
Figure 5. Mode of failure in a plane-strain analysis.
4.3
Rock-mass properties
The rock-mass properties used in all the stability
analysis are indicated in Table 4. The tensile strength
has been considered to be a tenth of the cohesion of
each material. To obtain the factor of safety of the
proposed model the shear-strength reduction technique was used. To perform slope-stability analysis,
simulations are run for a series of increasing trial factors of safety, f, until the slope fails. At failure, the
safety factor equals the trial safety factor (i.e. f F)
(Lorig et al. 2000).
Actual shear strength properties, cohesion (c) and
friction (), are reduced for each trial according to the
following equations:
(1)
Figure 6. Mode of failure in an axisymmetric analysis.
conical and the different lithological units have a very
marked dip towards the East.
For the final design of the stable slope in the
Boinás East pit, the FLAC3D software (Itasca 1997)
(2)
The reduction in the shear strength properties is made
simultaneously for all materials.
120
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-15.qxd 08/11/2003 20:26 PM Page 121
Figure 7. Datamine block model.
Figure 8.
FLAC3D block model.
121
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-15.qxd 08/11/2003 20:26 PM Page 122
Table 5. Factor of safety for different slope angles and with
different types of analysis.
Face angle
Phase A1
B2
Deepest
level
Program
Type of Factor
analysis of safety
1
6
6
6
6
6
6
50
45
45
45
50
50
50
404
340
340
340
350
340
300
Plane
Plane
Axis
Axis
50
65
65
70
50
70
70
FLAC
FLAC
FLAC
FLAC
FLAC3D
FLAC3D
FLAC3D
1.25
1.05
1.70
1.50
1.45
1.503
1.35
1
A represents the face angle of the slope located above the
main Alpine Thrust. It represents the slope angle in the
Upper Limestones.
2
B represents the face angle in the materials located below
the main Alpine Thrust.
3
The higher value of FoS in the steeper design is due to a
change in the lithology present on that slope.
Figure 9. Zone with the maximum displacement in the
final Boinás East pit.
5 RESULTS AND CONCLUSIONS
Once analyzed the different proposed models, it was
proposed an open pit with lower level at 340 meters
ASL, a maximum slope height (in the East wall) of
345 meters. A factor of safety of 1.45 was obtained
with slope angles of 70° in the dolomite above the main
thrust, 60° in upper sandstone, fresh granite, fresh
skarn, tertiary, and black skarn, and 50° in the rest.
A comparison between the factors of safety
obtained for the different models and programs used
are provided in Table 5.
The minimum factor of safety values are obtained
in the East wall of the pit. Figure 9 shows the FLAC3D
model with the zone of maximum displacement. These
zone correspond with a convex geometry in the slope,
therefore steeper slopes could have been considered
in areas where the pit slopes were concaves, but these
was not our case. We only have changed the face angle
according with the geology and not with its geometry.
As we can see in the factor of safety obtained in the
different model, the influence of the radii of curvature
in the global stability of a pit is very considerable,
specially taking into account that a small increasing
in the overall face angle results in a very large amount
of ore recovered, as it was in our case.
On the other hand, the hard work required to design
a model for a complex deposit in three dimensions is
avoided when we import the block model into FLAC3D.
With the routine described above, it is easy to create a
block model with DATAMINE, or whatever other
program, and delete the block above the surface we
want to analyze, and them import all the model to
FLAC3D and obtain a factor of safety.
It must be take into account that with this system
we are going to have free faces at 90º and the high of
the block size, so we must confirm that the factor of
safety obtained corresponds to the slope factor and
not to the brick face.
ACKNOWLEDGEMENTS
The authors would like to thank Mr. Manuel G.
Fernández of Río Narcea Gold Mines for his great
work with Datamine, and Mr. Alan Riles, COO of Río
Narcea Gold Mines Ltd. for the valuable help in the
translation of the paper. Finally the authors are grateful to Mr. Pedro Varona of Itasca Consultores, S.L. for
his technical support. Thanks are extended also to Mr.
Pedro Velasco and Ms. Montserrat Senís for their help.
REFERENCES
Cepedal, A., Martin-Izard, A., Fuertes, M., Pevida, L.,
Maldonado, C., Spiering, E., Gonzalez, S. & Varela, A.
1998. Fluid Inclusions and Hydrothermal Evolution of
the El Valle-Boinas Copper-gold Deposits. In Arias, A.,
Martin-Izard, A. & Paniagua, A. (eds), Gold Exploration
and mining in NW Spain: 50–58. Oviedo.
Cepedal, M.A. 2001. Geología, Mineralogía, Evolución y
Modelo Genético del yacimiento de Au-Cu de El ValleBoinas. Belmonte (Asturias). Ph.D. thesis, University of
Oviedo.
Itasca Consulting Group, Inc. 1997. FLAC3D (Fast Lagrangian
Analysis of Continua in 3 Dimensions), Version 2.0.
Minneapolis: Itasca.
Itasca Consulting Group, Inc. 1998. FLAC (Fast Lagrangian
Analysis of Continua), Version 3.4. Minneapolis: Itasca.
122
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-15.qxd 08/11/2003 20:26 PM Page 123
Lorig, L. 1999. Lessons learned from slope stability studies.
In Detournay & Hart (eds), FLAC and Numerical
Modeling in Geomechanics: 17–21. Rotterdam: Balkema.
Lorig, L. & Varona, P. 2000. Practical Slope-Stability
Análisis Using Finite-Difference Codes. In Hustrulid, W.A.,
McCarter, M.K. & Van Zyl, D.J.A. (eds), Slope Stability
in Surface Mining: 115–124. Colorado: Society for
Mining, Metallurgy and Exploration, Inc.
Martin-Izard, A., Cepedal, A., Fuertes, M., Pevida, L.R.,
Maldonado, C., Spiering, E., Varela, A. & Gonzalez, S.
1998. The El Valle Deposit: an example of Koper-gold
Skarn Mineralization overprinted by late epithermal
events. Cantabrian Mountains, Spain. In Arias, A.,
Martin-Izard, A. & Paniagua, A. (eds), Gold Exploration
and mining in NW Spain: 43–50. Oviedo.
Steffen, Robertson & Kirsten (UK) Ltd. 1996. Investigation
into the Stability of Proposed Excavated Slopes and
Excavatability of Materials at El Valle, Boinas West and
Boinas East. Report to Rio Narcea Gold Mines, S.A.
Report no. ADM/752MH001.REP, October 1996.
Steffen, Robertson & Kirsten (UK) Ltd. 1999. Boinas East
Open Pit Verification of Overall Slope Angles for pir
Optimisation Studis. Report to Rio Narcea Gold Mines,
S.A., January 1999.
z1 zc
z2 zc
z3 zc 16
z4 zc
z5 zc 16
z6 zc 16
z7 zc 16
command
gen zon bri p0 x0 y0 z0 p1 x1 y1 z1 p2 x2 y2 z2
p3 x3 y3 z3 p4 x4 y4 z4 &
p5 x5 y5 z5 p6 x6 y6 z6 p7 x7 y7 z7 size 1 1 1
group mat
end_command
end_loop
status close
end
creamalla
APPENDIX – FISH ROUTINE
new
def creamalla
array aa(11488);(number of lines in file *.txt)
status open(‘BE16x16a.txt’,0,1)
status read(aa, 11488)
loop k(2, 11488); no lee la primera línea
xx parse(aa(k),1)
yy parse(aa(k),2)
zz parse(aa(k),3)
xxmax max(xx,xxmax)
mat parse(aa(k),4)
xc (xx-1)*16 662;put blocks in x local
yc (yy-1)*16 9745;put blocks in y local
zc (zz-1)*16
x0 xc
x1 xc 16
x2 xc
x3 xc
x4 xc 16
x5 xc
x6 xc 16
x7 xc 16
y0 yc
y1 yc
y2 yc 16
y3 yc
y4 yc 16
y5 yc 16
y6 yc
y7 yc 16
z0 zc
123
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-16.qxd 08/11/2003 20:26 PM Page 125
Underground cavity design
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-16.qxd 08/11/2003 20:26 PM Page 127
FLAC and Numerical Modeling in Geomechanics, Brummer et al. (eds)
© 2003 Swets & Zeitlinger, Lisse, ISBN 90 5809 581 9
The effect of tunnel inclination and “k” ratio on the behavior of
surrounding rock mass
M. Iphar, M. Aksoy, M. Yavuz & G. Once
Osmangazi University, Mining Engineering Dept., Eskisehir, Turkey
ABSTRACT: Rock behavior around tunnels excavated in the same rock with various inclinations and “k” ratios
has been investigated by numerical analysis employing the FLAC3D finite difference code. Stress distributions and
displacements at the critical points of the tunnels in underground mining have been examined. Observed stress and
displacement values with respect to the change in tunnel inclination and “k” ratio have been analyzed by using statistical methods employing “multiple regression analysis” in order to find out a meaningful correlation between the
stress, displacement values and the inclination and “k” ratios. Statistical analyses have presented meaningful correlations giving mathematical equations whose dependent variable is displacement or stress and independent variables
are tunnel inclination and “k” ratio.
1 INTRODUCTION
Numerical modeling is a very powerful and useful
tool used widely in designing underground structures
such as tunnels, roadways, caverns etc. The displacements and stresses around the underground openings
can be predicted by employing numerical modeling in
advance.
During a project carried out for the GLI (Western
Lignite Company in Turkey), a main roadway inclined
at 8° dip has been designed down to a depth of 500 m
in the underground coal colliery (Once et al. 2001a).
The geomechanical properties of the rock mass where
the roadway will be driven have been obtained from
laboratory tests (Çekilmez 1988). In the light of this
project, a new study has been carried out to investigate the effect of “k” ratio (the ratio of horizontal
stress to vertical stress) and tunnel inclination on the
rock mass behavior in terms of displacements and
stresses. To achieve this goal, the FLAC3D finite difference code has been used.
After the numerical modeling, statistical analyses
have been performed to find out a meaningful correlation explaining the effects of “k” ratios and the
inclination on the stresses and displacements.
tunnel inclinations have been varied between 0 and 45
degrees in 5 degrees intervals while the “k” ratios have
been varied between 0.5 and 2 in 0.5 intervals.
Three points have been selected to observe the displacements around the tunnel. These history points
have been located on the center-line of the tunnel, one
at the roof and one at the floor, and one at axis level in
the sidewall. The stresses in the zones adjacent to the
history points have also been monitored. To evaluate
the rock behavior properly, the coordinates of the history points have been kept at the same coordinates in
each of the models although the tunnel inclination has
been changed.
Displacement values and maximum (1) and minimum (3) principal stresses observed in three directions at the roof, floor and sidewall of the tunnel have
been subjected to the statistical analysis.
After carrying out multiple regression analysis for
displacements and 1, 3 principal stresses at the roof,
floor and sidewall in x, y and z directions, regression
models have been proposed to predict the displacements and stresses.
Displacements in the x-direction at the history
points in the roof and the floor have not been included
because these points lie on the plane of the symmetry
for the models.
2 NUMERICAL MODELING STUDIES
2.2
2.1
Applied method
Forty different numerical models have been formed in
FLAC3D (Itasca 1997). During the model formation, the
The rock mass in which the tunnel will be driven is
marl formation. The geomechanical properties of the
marl were determined from MTA (General Directorate
127
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
Rock mass properties
09069-16.qxd 08/11/2003 20:26 PM Page 128
Table 1. RMR calculation for marl.
Geomechanical
properties
Uniaxial
compressive strength
RQD
Spacing of joints
Condition of joints
Ground water
Joint orientation
RMR
Values
Rating
11.2 MPa
2
61.4%
80–200 mm
Slightly rough surfaces,
separation 1 mm,
soft joint wall rock
115.2 lt/min
Unfavorable
3.5 m
13
8
20
4.60 m
4
10
37
Figure 1. Tunnel geometry.
Table 2. Rock mass properties used in
modeling (Çekilmez 1988).
Property
Values
Poisson’s ratio
Bulk modulus (MPa)
Shear modulus (MPa)
Tensile strength (MPa)
Internal friction angle (°)
Cohesion (kPa)
Density (kg/m3)
0.25
790
475
0.28
37
70
2500
of Mineral Research & Exploration Institution) drillings
and discontinuity spacing were obtained using the
approach proposed by Priest & Hudson (1976) because
of the lack of information about discontinuities in the
MTA report (Çekilmez 1987).
The RMR value was calculated using the RMR classification system described by Bieniawski (1979) and
their ratings are shown in Table 1.
2.3
Figure 2. The FLAC3D model with fixity condition and
coordinate system.
One of the models with fixity condition and coordinate system is shown in Figure 2.
Numerical models in FLAC3D
The rock mass has been assumed to be an isotropic,
homogenous material. It has been modeled as a MohrCoulomb material through the study.
The geomechanical properties used in the numerical
modeling have been taken from the GLI project as mentioned before and the values of these properties are
given in Table 2 (Once et al. 2001b).
In-situ stresses have been calculated by using the
following equations.
z h
x y k z
(ton/m2)
(ton/m2)
where z vertical stress; density of marl;
h depth, x and y lateral stresses, k “k” ratio
(Hoek & Brown 1980).
During the modeling, the presence of groundwater
was ignored. The tunnel, whose dimensions are given in
Figure 1, has been simulated as a single step excavation.
3 RESULTS
Displacement and stress values obtained from the
modeling studies have been evaluated separately considering “k” ratio and inclination of the tunnel.
3.1
The y and z displacements at the roof have been categorized in terms of “k” ratio and tunnel inclination. In
Figure 3, it is observed that the magnitude of the
y displacements was not significantly affected by varying the “k” ratio but was greatly affected by varying
the tunnel inclination.
It can be seen from the Figure 4 that displacements in
the roof in the z-direction generally increase as the
“k” ratio increases for the case where the inclination
128
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
Evaluation of models in terms of
displacements
09069-16.qxd 08/11/2003 20:26 PM Page 129
0.2
Predicted Values (m)
0.0
0.2
0.0
-0.2
-0.4
Ydisprf .6
-0
(m)
-0.8
-1.0
-0.2
-0.4
-0.6
-0.8
-1.0
0
-1.2
-1.2
0
2.
5
0
1.
k-ratio
0.5
10
15
20
25
30
35
40
45
50
5
1.
-1.0
-0.8
-0.6
-0.4
-0.2
0.0
0.2
Observed Values (m)
Incline (o)
Figure 5. Observed vs predicted values in y-direction (roof ).
Figure 3. y displacements vs “k” ratio and inclination (roof).
0.0
Predicted Values (m)
-0.2
0.0
-0.3
-0.6
-0.9
-0.4
-0.6
-0.8
-1.0
-1.2
Zdisprf
1.2
(m) -
-1.4
-1.4
-1.5
-1.8
0.5
-1.2
-1.0
-0.8
-0.6
-0.4
-0.2
0.0
Observed Values (m)
50
45
40
35
30
25
20
15
10
5
1.0
k-ratio
1.5
Incline (˚)
0
2.0
Figure 6. Observed vs predicted values in z-direction (roof ).
Figure 4. z displacements vs “k” ratio and inclination (roof ).
is constant. On the contrary, displacements in the roof
in z-direction generally decrease as the inclination
increases for the case where the “k” ratio is constant.
Moreover, it should be noted that increasing the
inclination angle has a great effect on the amount of
vertical displacement in the case of a high “k” ratio.
The proposed regression equation for the displacements in the y-direction at the roof utilizing the data
from the models studied is given in Equation 1:
(1)
where Ydisprf y-displacement in the roof; k “k”
ratio and I inclination of the tunnel (°).
The predicted values obtained from the proposed
equation are plotted against the values from the
numerical models in Figure 5. This regression model
shows a strong correlation between the observed and
predicted values (r 0.99).
The proposed regression equation for the displacements in the z-direction in the roof is presented
below:
(2)
where Zdisprf z-displacement at the roof; k “k”
ratio and I inclination of the tunnel (°).
The predicted values are plotted versus the observed
values in Figure 6. This regression model also shows
a strong correlation between the observed and predicted values (r 0.98).
The magnitude of the y displacements for the history
point in the floor was greatly affected by the variation
129
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-16.qxd 08/11/2003 20:26 PM Page 130
0.7
Predicted Values (m)
0.6
0.9
0.6
0.3
Ydispfl 0.0
(m)
-0.3
-0.6
0.4
0.3
0.2
0.1
0.0
-0.1
2.0
-0.2
-0.1
0.0
1 .5
1 .0
0
k-ratio
0.1
0.2 0.3 0.4 0.5
Observed Values (m)
0.6
0.7
Figure 9. Observed vs predicted values in y-direction (floor).
0.5
50 5
4 0
4 5
3 0
3 5
2 0
Incline (˚) 2 15
10 5
Figure 7. y displacements vs “k” ratio and inclination (floor).
Predicted Values (m)
0.7
1.8
1.5
1.2
Zdispfl
(m) 0.9
0.6
0.5
0.4
0.3
0.2
0.6
0.1
0.1
0.3
50
2.0
0
0.3
0.4
0.5
Observed Values (m)
0.6
0.7
k-ratio
5.0
5
0.2
Figure 10. Observed vs predicted values in z-direction
(floor).
1.5
1.0
45 0
4 35
30 5
2 0
Incline (˚)
2 5
1 0
1
0.5
Figure 8. z displacements vs “k” ratio and inclination (floor).
of “k” ratio and tunnel inclination. As can be seen
from Figure 7, the horizontal (y) displacements
increase with an increase in both the “k” ratio and
tunnel inclination.
Figure 8 shows that the magnitude of the vertical
displacements in the floor increased with an increase
in the “k” ratio. On the contrary, the vertical displacements decrease as the tunnel inclination increases.(4)
The regression equation proposed for predicting
the displacements in the y-direction in the floor is
given below:
(3)
where Ydispfl y-displacement at the floor; k “k”
ratio and I inclination of the tunnel (°).
The predicted values versus observed values in the
floor in the y-direction are shown in Figure 9. This
regression model shows a strong correlation between
the observed and predicted values (r 0.99).
The regression equation proposed for predicting
the z displacements in the floor is as follows:
where Zdispfl z-displacement at the floor; k “k”
ratio and I inclination of the tunnel (°).
The predicted values versus observed values in the
floor in the z-direction are shown in Figure 10. This
regression model also shows a strong correlation
between the observed and predicted values (r 0.99).
130
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-16.qxd 08/11/2003 20:26 PM Page 131
0.0
0.60
-0.2
0.45
.4
Zdispsdw 30
0.
(m)
Xdispsdw -0
(m) -0.6
0.15
-0.8
0.5
1.0
k-ratio 1.5
2.0
0
2
1 0
10 5
5
4 50
4 5
35 0
2530
50 5
4 0
4 5
3 0
3 5
2 0
Incline (˚) 2 15 0
1 5
Incline (˚)
Figure 11. x displacements vs “k” ratio and inclination
(sidewall).
1.5
1.0
0
0.5
2.0
k-ratio
Figure 13. z displacements vs “k” ratio and inclination
(sidewall).
0.0
-0.1
Predicted Values (m)
0.20
0.15
0.10
Ydispsdw
0.05
(m)
0.00
0.05
-
-0.3
-0.4
-0.5
2.0
1.5
-0.6
-0.6
1.0
k-ratio
5
0
Figure 12. y displacements vs “k” ratio and inclination
(sidewall).
The x displacements in the sidewall are not affected
by the change in the tunnel inclination. But they are
affected by the change in the value of “k” ratio as seen
from Figure 11.
In the case of the y displacements in the sidewall
shown in Figure 12, they tend to increase as the tunnel
inclination increases. When the change in the “k”
ratio is considered, it should be noted that there is no
significant increase in the y displacements up to 20°
tunnel inclination. After this inclination, y displacements have increased as “k” ratio increased.
Figure 13 shows that vertical displacements at the
sidewall increase due to an increase in the “k” ratio.
However, the vertical displacements decrease due to
an increase in the tunnel inclination.
-0.4
-0.3
-0.2
-0.1
0.0
Figure 14. Observed vs predicted values in x-direction
(sidewall).
The proposed regression equation for the displacements in the x-direction at the sidewall is given in
Equation 5:
(5)
where Xdispsdw x-displacement at the sidewall;
k “k” ratio and I inclination of the tunnel (°).
The predicted values versus observed values in
the sidewall in the x-direction are shown in Figure 14.
This regression model also shows a strong correlation
between the observed and predicted values (r 0.99).
131
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
-0.5
Observed Values (m)
0.
50 5
4 0
4 35
30 5
2 0
2
Incline (˚) 1510
5
-0.2
09069-16.qxd 08/11/2003 20:26 PM Page 132
The regression model recommended to predict the
y displacements in the sidewall is given below:
(6)
where Ydispsdw y-displacement at the sidewall;
k “k” ratio and I inclination of the tunnel (°).
The predicted values versus observed values in the
sidewall in the y-direction are shown in Figure 15.
This regression model shows a strong correlation
between the observed and predicted values (r 0.99).
The regression model proposed for predicting the
z displacements in the sidewall is as follows:
(7)
0.20
where Zdispsdw z-displacement at the sidewall;
k “k” ratio and I inclination of the tunnel (°).
The predicted values versus observed values in the
sidewall in the z-direction are shown in Figure 16.
This regression model also shows a strong correlation
between the observed and predicted values (r 0.99).
The correlation coefficients of all the proposed
regression models for displacements have been summarized in Table 3.
3.2
Evaluation of models in terms of stresses
As the observed principal stresses are examined, no
strong relationship between the principal stresses and
the “k” ratio or the tunnel inclination has been found
except for the principal stresses in the tunnel floor.
Therefore, only principal stresses in the floor are taken
into consideration.
The graphs of maximum and minimum principal
stresses are given in Figures 17 and 18 respectively.
The regression equation proposed for predicting
the magnitude of 1 in the floor and the correlation
coefficient are given below:
Predicted Values (m)
0.15
0.10
(8)
0.05
r 0.95
0.00
Table 3. Correlation coefficients for displacements.
-0.05
Correlation coefficient (r)
-0.10
-0.10
-0.05
0.00
0.05
0.10
0.15
0.20
Direction
Roof
Floor
Sidewall
x
y
z
–
0.99
0.98
–
0.99
0.99
0.99
0.99
0.99
Observed Values (m)
Figure 15. Observed vs predicted values in y-direction
(sidewall).
Predicted Values (m)
0.5
0.4
-315
0.3
-330
-345
0.2
1 fl (kPa) 60
-3
-375
0.1
0.0
0.0
2.0
0.1
0.2
0.3
0.4
1.5
0.5
k-ratio 1.0
Observed Values (m)
0.5
Figure 16. Observed vs predicted values in z-direction
(sidewall).
Figure 17.
132
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
0
5
1510
2
25 0
3 30
40 5
Incline (˚)
4
50 5
1 vs “k” ratio and inclination (floor).
09069-16.qxd 08/11/2003 20:26 PM Page 133
-10
Predicted Values (kPa)
-15
-16
-20
-24
-28
3 fl (kPa) -32
-36
-40
0
2.
5
1.
0
k-ratio
1.
0.
5
0
5
1
15 0
2
2 0
30 5
3
Incline
4 5
4 0
50 5
-20
-25
-30
-35
-40
(˚)
-45
-45
-40
-35
-30
-25
-20
-15
Observed Values (kPa)
Figure 18.
3 vs “k” ratio and inclination (floor).
Figure 20. Observed vs predicted 3 (floor).
Table 4. Correlation coefficients for stresses.
Predicted Values (kPa)
-300
Correlation coefficient (r)
-320
Stress
Roof
Floor
Sidewall
-340
1
3
0.75
0.63
0.95
0.96
0.68
0.68
-360
The correlation coefficients of all proposed regression models have been summarized in Table 4 for
maximum and minimum principal stresses. As seen,
there is only a meaningful correlation for the history
point in the floor.
-380
-400
-400
-380
-360
-340
-320
-300
Observed Values (kPa)
Figure 19. Observed vs predicted 1 (floor).
4 CONCLUSIONS
where 1fl max principal stress at the floor;
k “k” ratio and I inclination of the tunnel (°).
The predicted values versus observed values of 1
at the floor are shown in Figure 19. This regression
model shows a strong correlation between the observed
and predicted values.
The proposed regression equation and the correlation coefficient for 3 at the floor are as follows:
(9)
r 0.96
where 3fl min principal stress at the floor; k “k”
ratio and I inclination of the tunnel (°).
The predicted values versus observed values of 3
in the floor are shown in Figure 20.
This regression model also shows a strong correlation between the observed and predicted values.
When the displacements and stresses in the model
studies have been examined in detail, the results can
be stated as follows:
1. The y-components of the movements in the roof
and the floor increase radially into the tunnel as
the tunnel is inclined. This trend becomes more
obvious with the increase of the horizontal stresses.
2. The z-components of the movements in the roof
and the floor decrease as the tunnel is inclined. On
the contrary, they increase as the horizontal stresses
increase.
3. Displacements in the x-direction in the sidewall
are not affected by the change of tunnel inclination.
But, they increase towards the tunnel inside as the
horizontal stresses increase.
4. The y-component of the movement in the sidewall
increases due to the increase of tunnel inclination.
This trend becomes more obvious with the increase
of horizontal stresses.
5. The z-component of the movement in the sidewall tends to decrease with the increase of tunnel
133
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-16.qxd 08/11/2003 20:26 PM Page 134
inclination. The magnitude of this component
increases as the horizontal stresses increase.
6. The maximum and minimum principal stresses in
the floor generally increase as the tunnel is inclined.
But, it should be noted that some model results are
not consistent with this general trend.
The results of the numerical model studies have been
analyzed to find out the presence of correlation for
the displacements and stresses at the tunnel boundary
with the “k” ratio and tunnel inclination. As a result of
multiple regression analyses carried out, strong relationships have been found between the “k” ratio, tunnel
inclination and displacements. But the relationship
between the “k” ratio, tunnel inclination and principal
stresses are not as strong as those of displacements
except for those of principal stresses in the floor.
These proposed regression models can be used
especially to predict the displacements around the
boundary of tunnels which will be excavated in similar rock masses (marl formation). It should be noted
that these predicted values should be used with great
caution. Because they will be preliminary and rough
estimates of displacements and principal stresses.
Proposed regression equations can easily be affected
by the chance of rock properties, size and shape of
tunnel, groundwater etc.
Similar analyses can be caried out for different rock
masses. These regression models can be developed
and they can be used for various rock mass conditions.
REFERENCES
Bieniawski, Z.T. 1979. The geomechanics classification in
rock engineering applications. Proc. Xth. Congress Int.
Soc. Rock Mech. Vol. 2: 41–48. Montreux.
Çekilmez, V., Koç, S. & Alemdaroglu, T. 1987. The geotechnical research of the drills in Kütahya-Tavşanl1Tunçbilek District. M.T.A. Institute, Ankara/Turkey.
Çekilmez, V. 1988. The geotechnical research of the JT4 drill
in Kütahya-Tavşanl1-Tunçbilek district. M.T.A. Institute,
Ankara.
Hoek, E. & Brown, E.T. 1980. Underground excavations in
rock. Institution of Mining Metallurgy, London.
Itasca Consulting Group, Inc. 1997. FLAC3D – Fast
Lagrangian Analysis of Continua in 3 Dimensions,
Version 2.0 User’s Manual. Minneapolis, MN: Itasca.
Once, G., Iphar, M. & Yavuz, M. 2001a. Design of the main
transport road of the deep coal seam panels of GLI
Tunçbilek mine in Turkey, Osmangazi University Research
Fund Project, Eskisehir, Turkey.
Once, G., Iphar, M. & Yavuz, M. 2001b. Study of ground
control of the main transport road of the deep coal seam
panels of GLI Tunçbilek mine in Turkey, FLAC and
Numerical Modeling in Geomechanics, Lyon, France,
29–31 October 2001. Rotterdam, Balkema.
Priest, S.D. & Hudson, L. 1976. Discontinuity spacings in
rock. International Journal of Rock Mechanics and Mining
Sciences. Vol. 13: 135–148.
134
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-17.qxd 08/11/2003 20:27 PM Page 135
FLAC and Numerical Modeling in Geomechanics, Brummer et al. (eds)
© 2003 Swets & Zeitlinger, Lisse, ISBN 90 5809 581 9
Numerical analysis of the volume loss influence on building during
tunnel excavation
O. Jenck & D. Dias
INSA Lyon, URGC Géotechnique, Villeurbanne, France
ABSTRACT: Shallow tunneling performed by a Tunnel Boring Machine (TBM) induces volume loss, mainly
due to the conical shape of the machine and the consolidation of the injected grout. This excavation volume loss
causes ground movements at the surface that can induce damages to surrounding structures. However, to know
the influence on structures, it is not sufficient to apply the Greenfield strains because of the influence of the
structure’s stiffness. Therefore a computational three-dimensional soil-structure interaction analysis is required
to take into account all the complexity of the problem. This paper presents a FLAC3D analysis of the interaction
between shallow tunnel excavation and surface buildings, applied to the case of the Lisboa subway. A simplified simulation of TBM tunneling is adopted by imposing volume loss. To highlight the influence of settlements
on a six-floor structure, different cases of volume loss are studied from 0.5 to 5 % of the total excavated volume.
1 INTRODUCTION
During the construction of a tunnel at shallow depth
in urban areas, prediction of the effects induced by the
excavation on surrounding buildings is very important.
In fact, the volume loss in tunnel generates soil displacements on surface that can cause damages to
existing structures. The traditional design of the constructions doesn’t take into account this type of loading
conditions. In order to control the volume loss in the
tunnel and to limit the damages, the tunnel is excavated, when it is possible, with a TBM.
A first approximation to predict the damages
caused to surrounding structures is done by applying
the soil deformations without any structure on surface,
called Greenfield deformations, to the structure’s
foundations. This method is recommended by AFTES
(1999). The Greenfield deformations can be calculated by an empirical (O’Reilly & New 1982, Peck
1969), analytical (Panet 1995, Sagaseta 1987) or
numerical method (Oteo & Sagaseta 1982, Swoboda
et al. 1989).
However, it is important to consider the structure
to estimate the soil movements because it contributes
to stiffen the ground and consequently to reduce the
soil displacements. Then, the determination of the
underground works influence on surrounding structures
becomes very difficult with empirical or analytical
methods. Only the numerical method is able to take
account of all the complexity of this type of soilstructure interaction problem.
Potts & Addenbrooke (1997) used two-dimensional
numerical calculations considering the structure as an
equivalent weightless beam with variable stiffness.
They showed the structure’s rigidity influence on surface ground movements induced by tunneling. Franzius
& Addenbrooke (2002) have then analyzed the influence of the structure’s weight. They showed that the
weight has very low influence on ground movements
when rigidity increases. Another two-dimensional calculation coupling the soil with a masonry building
was performed by Miliziano et al. (2002). The threedimensional building is taken into account by an
equivalent two-dimensional wall. They demonstrated
the significant effect of the relative structure stiffness
in reducing differential displacements, and on the
predicted damage.
Nevertheless, with 2D simulations it is worth noting
that an empirical parameter such as the deconfinement
ratio or the volume loss in tunnel has to be considered
as remarked by Benmebarek et al. (1998). Dias et al.
(1999) have compared results from 2D and 3D
numerical simulations with experimental data. They
showed that the surface settlement trough obtained
with the 3D calculation is more realistic than the
trough obtained with the 2D calculation, even with a
simple constitutive model for the soil. Moreover, it is
impossible to study the damages induced on the
135
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-17.qxd 08/11/2003 20:27 PM Page 136
2 EXPERIMENTAL DATA
2.1
Experimental section
The studied model is based on the case of the Lisboa
subway. The experimental section (Fig. 1) is located
near the new Ameixoeira station. The geotechnical
properties (Table 1) are given by Ribeiro e Sousa et al.
(2003).
The excavation is 26 m deep. The tunnel diameter
is equal to D 9.8 m. The section is located in the
silty sand layer, where the mechanical properties are
relatively poor.
2.2
7m
C2
26 m
C3
14 m
C4
17 m
C5
Table 1. Geotechnical properties.
Name:
Soil type
C1
Clay
C2
Clay
C3
C4
C5
Limestone Silty sand Clay
E [MPa]
c [kPa]
" [°]
[kN/m3]
Ko
15
0.35
5
30
20.5
0.6
15
0.4
5
32
20.7
0.7
266.5
0.35
10
37
20.5
0.7
0
-0.05
-0.1
-0.15
-0.2
-0.25
-0.3
-0.35
-0.4
-0.45
-40
Section S28
Section S29
Section S30
-20
0
44.7
0.35
0
35
20.65
0.8
S28
20
40
60
80
Distance to the section (m)
180
0.37
250
30
20.4
1.05
S29
S30
100
120
Figure 2. Longitudinal settlement troughs.
section, the maximum measured settlement is equal
to 0.3 cm.
3 NUMERICAL MODEL ADOPTED
3.1
Ground mass
Figure 4 presents the numerical model of the groundmass. Due to the symmetry conditions, only half of the
136
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
C1
Figure 1. Experimental section.
Measured surface settlements
Measured settlements have been obtained on several
sections near the Ameixoeira station (Ribeiro e Sousa
et al. 2003). Results are shown in Figures 2 & 3.
Figure 2 presents the settlements measured above
the tunnel axis in three different sections, for different
positions of the TBM. Figure 2 illustrates experimental longitudinal settlement troughs. The maximum
observed settlement is about 0.4 cm settlements are
observed even when the TBM has not already reached
the instrumented section. On this underground works,
an earth pressure shield is used.
Figure 3 shows the observed surface settlements in a
transversal section (S31), at the final state of the excavation (when the TBM is far away). This curve is called
transverse settlements trough. In this instrumented
4m
9m
Surface settlements (cm)
structure in the tunnel axis direction when using 2D
simulations.
Some authors have already used three-dimensional
numerical modeling. For instance Mroueh & Shahrour
(2003) have compared the results of a soil-structure
interaction calculation of tunnel excavation below a
structure with the results obtained by imposing the
Greenfield movements upon the structure. They
showed that this last method is very severe in terms of
induced forces in the structure. Netzel & Kaalberg
(2000) have modeled the interaction between TBM
digging and masonry structures in order to obtain
specific damage criteria.
This article presents a three-dimensional numerical
analysis of the soil-structure interaction phenomenon
during shallow tunneling. The tunnel excavation is a
simplified simulation of the real phases of a TBM
based on the concept of volume loss. The soil behavior
is elastic perfectly plastic. The structure is composed
of columns and floors founded on a raft. The parametrical study deals with the influence of volume loss
in tunnel. Results are analyzed in terms of ground
surface displacements and of stresses induced in the
structure.
09069-17.qxd 08/11/2003 20:27 PM Page 137
Surface settlements (cm)
0
Step n
Z
-0.05
20 m
-0.1
Y
-0.15
-0.2
-0.25
Tunnel face
-0.3
-0.35
-20
-15
-10
-5
0
5
10
Distance to tunnel axis (m)
15
20
Step n+1
20 m
Figure 3. Transverse settlement trough.
Z
Y
One element length
X
Figure 5. Longitudinal tunnel section – excavation process.
have a linear variation on the distance of 20 m. After
this distance, the lateral displacements are constant,
as shown on Figure 5. This process simulates the principal excavation phases:
–
–
–
–
Figure 4. Numerical model.
ground mass is modeled (plane of symmetry Y–Z).
The model is 100 m wide in the X direction, 90 m
long in the Y direction (parallel to tunnel axis) and
51 m high (Z direction). The numerical model consists of approximately 85,000 nodes.
3.2
Ground behavior
The behavior of the soil is set as elastic perfectly plastic with a Mohr-Coulomb failure criterion. The flow
rule is non-associated and the dilatancy angle is set as
# " 30°.
Due to the very fast pore pressure dissipation
observed, the calculation is done in drained conditions.
3.3
Simulation of excavation
The adopted excavation process for the calculation is
a simplification of the confinement-deconfinement
phases induced by the boring machine. The hypotheses are as follows: the soil displacements at the tunnel
face are blocked, simulating a perfect equilibrium of
confinement pressures. The lateral soil displacements
The initial position of the tunnel is Y 0 m and
the numerical phases of excavation are as follows:
– excavation on one element length,
– fixation of the tunnel face nodes,
– convergence of tunnel walls until reaching the given
displacement shape,
– if a node reaches the limit, it will be fixed,
– when the model equilibrium is reached, all the
nodes are freed,
– translation of the loading system of one element
length.
Hence, there are as many excavation steps as there are
elements on the model length.
The displacement field imposed at the tunnel walls
corresponds to a volume loss. This volume loss in
tunnel normalized by the total excavated volume is
called Vt. The excavation is ended when the model is
entirely bored. Then the tunnel face is at Y 90
20 110 m which corresponds to the entire model
length added with the distance between the tunnel
face and the position where the lateral displacement is
constant.
137
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
Conical shape of TBM
Grout injection
Grout consolidation
Setting of the concrete rings
09069-17.qxd 08/11/2003 20:27 PM Page 138
is the point of inflection of the transverse settlement
trough.
4 REFERENCE CASE: EXCAVATION
WITHOUT STRUCTURE ON SURFACE
The reference case corresponds to an excavation of
the numerical model with Vt 5%.
According to Benmabarek et al. (1998), this value
seems to be the higher value obtained with the TBM
excavation method and do not correspond to the
observed settlements.
4.1
5 INFLUENCE OF VOLUME LOSS IN TUNNEL
ON GREENFIELD DISPLACEMENTS
In order to study the influence of volume loss in tunnel on Greenfield soil displacements, several calculations are done with Vt from 0.5% to 5%.
Surface settlements
The surface settlement distribution in a transverse
section at the final state is shown on Figure 6. The distance to tunnel axis is normalized by the tunnel diameter D. The maximum settlement is equal to 4 cm; it is
about ten times higher than the observed settlements
(see section 2.2).
The adopted numerical process for simulating the
tunnel excavation with a TBM is able to reproduce a
surface displacement trough in agreement with the
Gaussian distribution, which matches very closely
experimental observations. This settlement distribution is given by Peck (1969) equation:
5.1
Surface settlements
Figure 8 compares the transversal settlement troughs
for the different values of Vt, at the final state.
All the curves show a Gaussian distribution with
the same value of i. The maximum surface settlements are:
– for Vt 3%,
Smax 2.5 cm
– for Vt 1%,
Smax 1 cm
– for Vt 0.5%, Smax 0.5 cm
These results are reported in Figure 9. A quasi-linear
relation between tunnel volume loss and maximum
surface settlement is observed.
(1)
0.05
4.2
Horizontal surface displacement
Figure 7 presents the horizontal surface soil strains in
a transverse section, at the final state. In this figure,
two distinct zones are observed. In the center of the
trough, the soil is in compression and on the edges the
soil is in extension. The limit between these two zones
0
0
1
Distance to tunnel axis (x/D)
2
4
3
5
6
8
9
-0.05
-0.10
-0.15
extension
Figure 7. Horizontal strain in a transverse section.
0
7
-1
-2
-3
0
1
Distance to tunnel axis (x/D)
2
3
4
5
-0.5
-1
-1.5
-2
-2.5
-3
-3.5
-4
-4.5
-4
Figure 8. Transverse settlement trough.
138
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
Distance to tunnel axis (x/D)
5
7
2
3
4
6
0.00
compression
i
Figure 6. Transverse settlement trough.
1
-0.20
Surface settlements (cm)
Surface settlements (cm)
Horizontal strain (%)
Where S settlement at distance x of the tunnel
axis, Smax maximum settlement obtained in the
trough center, i distance from the inflection point
of the trough to tunnel axis. In this case, i 1.8 D.
0
Vt
0.5%
0.5%
1%
1%
3%
3%
5%
5%
6
7
09069-17.qxd 08/11/2003 20:27 PM Page 139
D/2
Maximum settlement (cm)
5
Tunnel
4
18m
Smax = 0.82Vt
4m
3
4m
2
Y
12m
1
0
0
1
3
4
2
Tunnel volume loss (%)
X
5
Figure 9. Liner relation between maximum settlement
and Vt.
Symmetry axis
Figure 11. Column position.
Horizontal strain (%)
0.05
0
1
Distance to tunnel axis (x/D)
2
3
4
5
6
7
Z
8
Y
X
0.00
-0.05
-0.10
-0.15
Vt
5%
3%
1%
0.5%
-0.20
Figure 10. Horizontal strain in a transverse section.
Figure 12. Numerical model coupling soil and structure.
The tunnel volume loss of Vt 0.5% corresponds
to the observed surface settlement (Figs. 2 & 3).
5.2
Horizontal surface displacement
Figure 10 compares the horizontal surface displacements for the values of Vt, at the final state.
The limit between the two zones is the same for all
values of Vt. As in the previous paragraph, a linear
relation is observed between Vt and the maximum
soil compression.
6 COUPLED CALCULATION: MODELING OF
THE STRUCTURE
In order to study the soil-structure interaction during
shallow tunneling, three-dimensional calculations coupling ground mass and structure are presented.
6.1
Geometry of the structure
The studied structure is a simplification of existing
buildings. It is composed of columns of square section
(0.4 m 0.4 m), and slabs of 0.3 m thickness, founded
on a 0.3 m raft, which size is 12 m 36 m. The building has seven levels of 4 m height.
Figure 11 shows the column’s position. There is no
eccentricity considered between the structure and the
tunnel; therefore, only the half of the structure is
modeled.
6.2
139
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
Numerical model coupling soil and structure
Figure 12 shows the numerical model coupling
ground mass and structure. The structure is located in
the middle of the model length (Y-axis). Columns are
taken into account as beams, slabs and raft as shells.
The structure behavior is elastic with properties of a
reinforced concrete: E 19 GPa and 0.2. The
soil nodes are bound with the structure nodes.
The structure is disposed on the numerical model
in one phase. Then equilibrium of the model is reached.
The structure is only loaded with its own weight
( 25 kN/m3). After that the soil displacements are
initialized in order to study only the tunneling effect.
09069-17.qxd 08/11/2003 20:27 PM Page 140
The forces in the structural elements are not initialized: this step represents the initial state in terms of
internal forces in the structure. Finally, the obtained
numerical model is excavated.
Surface settlement (cm)
0
7 COUPLED CALCULATION: REFERENCE
CASE, Vt 5%
The reference case of the calculation coupling soil
and structure is compared with the reference case
without structure, presented in section 4.
Surface soil displacements
5
Building
-1
-2
Greenfield
With structure
-3
-4
0
0
Distance to tunnel axis (x/D)
2
3
4
5
6
7
1
8
9
-0.5
-1
Greenfield
-1.5
With structure
-2
Figure 14. Horizontal displacement with and without
structure, Vt 5%.
MY
TY
Tunnel axis
Y
Induced forces in the structure columns
Tx
Mx
X
During the excavation, the forces in the structure
columns are analyzed. Figure 15 defines the shear
forces and the bending moments in a column section.
Figure 16 shows the maximum values of the internal
forces normalized by the maximum initial values F/Fini,
for different excavation length.
The transverse shear forces increase considerably
when the TBM passes below the structure. Then
important values are kept until the end of the excavation. Longitudinal shear forces increase when TBM is
located below and just next to the building, and
decrease to their initial values when TBM moves off.
The axial forces are very lightly affected by digging
compared to the others forces. Then, they are not represented here.
TY
Tx
MY
Mx
: longitudinal shear force
: transversal shear force
: transversal bending moment
: longitudinal ending moment
Figure 15. Forces in a column section.
The forces induced in the columns are studied
more in detail for four specific columns specified on
Figure 17. These columns are chosen because they
undergo a great stress increase or are representative
of the general behavior. Only the evolution of the
140
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
Distance to tunnel axis (x/D)
3
4
2
Figure 13. Surface settlement trough with and without
structure, Vt 5%.
Figure 13 compares the surface settlement troughs in
the middle of the model length, at the final state. With
a structure on surface, the settlements increase than
with the Greenfield calculation. The maximum surface
settlement increase from 4.1 cm to 4.8 cm is equal to
15%; and the volume trough increase is equal to 5%.
Nevertheless, the settlement trough remains a Gaussian
curve in the two cases, with appreciatively the same
value for i.
Figure 14 compares the horizontal surface displacements in a transverse section with and without
structure, at the final state. In the first case, the horizontal soil displacements under the structure are negligible compared to the Greenfield case. This is due to
the high axial stiffness of the raft and due to the fact
that the raft is bound with the soil.
This is a significant result, which has also been
observed in field monitoring (Standing et al. 2002).
Hence, it is very severe to apply the Greenfield movements of soil to this structure to estimate the induced
damages, as recommended in first approximation by
AFTES (1999).
7.2
1
-5
Horizontal displacement (cm)
7.1
0
09069-17.qxd 08/11/2003 20:27 PM Page 141
20
50
My
Tx
40
Mx
Ty
Longitudinal bending
moment (kN.m)
F/Fini
60
30
20
10
15
10
5
0
0
10
20
0
30 40 50 60 70 80 90 100 110
Excavation length (m)
Figure 16. Maximum beam forces.
A
D
Column height (m)
B
X
C
Tunnel axis
Transversal bending
moment (kN.m)
30
20
10
0
0
2
20
40
60
80
Excavation length (m)
100
40
60
80
Excavation length (m)
20
Initial state
Excavation of 45m
Excavation of 77m
Final state
16
12
8
4
-15
-10
-5
0
5
Longitudinal bending moment (kN.m)
10
Figure 20. Longitudinal bending moment (Mx) on column C.
Column
A
B
C
D
40
24
0
-20
Figure 17. Position of studied columns.
50
0
Figure 19. Maximum longitudinal bending moment on the
four columns.
28
Y
Column
A
B
C
D
100
Figure 18. Maximum transversal bending moment in the
four columns.
bending moment is studied, because shear forces vary
in the same way.
Figure 18 presents the evolution of the maximum
value of MY for the different studied columns. It can be
noted that more columns are far from the tunnel axis,
more columns are affected in the transverse direction.
Figure 19 presents the evolution of the maximum
value of Mx for the different studied columns. It
seems that the longitudinal stresses are similar in all
the building’s columns.
The most affected column in both directions is column C. Bending moments and shear forces distribution
in these columns are analyzed for different excavation
lengths.
Figures 19 and 20 present the repartition of the
longitudinal forces in column C. The most prejudicial
excavation step corresponds to the excavation length
of about 80 m. The maximum longitudinal bending
moment is 19 kN.m, reached between levels 3 and 4
(Fig. 19). For a length bored of 45 m, figure 19 shows
that the column is affected in the opposite direction,
with a value of 7 kN.m between levels 2 and 3. The
maximum longitudinal shear force is equal to 2.8 kN,
reached at level 5. Level 3 is also affected with
TY 2.6 kN (Fig. 20).
Figures 21 and 22 present the repartition of the
transversal forces on column C. The most prejudicial
excavation step is at the final state. The initial state is
not represented because of negligible values. This figure show that the most affected levels in the transverse direction are levels 1 and 2. The maximum
value of MY is 44 kN.m (Fig. 21) and the maximum
value of TX is 11 kN (Fig. 22).
141
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
28
28
24
24
Column height (m)
Column height (m)
09069-17.qxd 08/11/2003 20:27 PM Page 142
20
16
12
Initial state
Excavation of 77.5m
Final state
8
4
0
-4,0
-3,0
-2,0 -1,0
0,0
1,0
2,0
Longitudinal shear force (kN)
Final state
20
16
12
8
4
0
-12,0
3,0
Figure 21. Longitudinal shear force (TY) on column C.
Excavation of 45m
-8,0
-4,0
0,0
4,0
8,0
Transversal shear force (kN)
Figure 23. Transversal shear force (TX) on column C.
20
Excavation of 45m
Final state
Surface settlement (cm)
Column height (m)
28
24
16
12
8
4
0
-10
0
10
20
30
40
Transverse bending moment (kN.m)
50
Figure 22. Transversal bending moment (MY) on column C.
0
Distance to tunnel axis (x/D)
3
5
2
4
1
6
7
Vt
0.5%
1%
3%
5%
Building
Ratio = Swith str./Swithout
1.2
Influence of tunnel volume loss on a structure is also
studied. Calculations coupling soil and structure are
done using different volume loss in tunnel.
Influence of volume loss on surface settlements
Figure 23 compares the surface settlement troughs
obtained with a structure on surface for different volume loss imposed in tunnel. This figure can be compared with Figure 8. For a volume loss more than 1%,
the surface settlements are greater in the coupled calculation than in the Greenfield case. All curves present a Gaussian distribution of surface settlements.
Figure 24 presents the ratio between settlements
with structure and without structure according to the
position on the model length, above the tunnel axis, at
the final state. A ratio greater than 1 corresponds to
settlements higher than values without structure. It is
always the case, except with a very low tunnel volume
loss (Vt 0.5%). This figure illustrates that greater
is the volume loss in tunnel, greater is the settlement
increase compared to the Greenfield case.
0,5%
1%
3%
5%
1.15
1.1
1.05
1
0.95
0
10
20
30
40
50
60
70
Numerical model length (m)
80
90
Figure 25. Longitudinal settlements ratio.
8.2
Influence of volume loss on induced forces in
columns
Figure 25 presents the evolution of the maximum
value of TX (same evolution for maximum MY) for
different values of Vt. For each value of Vt, the transversal forces increase when TBM passes under the
structure and keep important values at the final state.
Figure 26 presents the evolution of the maximum
value of TY (same evolution for maximum MX) for
142
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
0
-0.5
-1
-1.5
-2
-2.5
-3
-3.5
-4
-4.5
-5
Figure 24. Surface settlement trough with structure on surface for different volume loss in tunnel.
8 COUPLED CALCULATION: INFLUENCE OF
VOLUME LOSS IN TUNNEL
8.1
12,0
09069-17.qxd 08/11/2003 20:27 PM Page 143
longitudinal forces are obtained for a length bored of
about 80 m.
60
Vt
F/Fini
50
5%
40
3%
30
1%
9 CONCLUSIONS
0.5%
20
10
0
0
10
20
30
40 50 60 70 80
Excavation length (m)
90 100 110
Figure 26. Evolution of maximum transversal forces in
columns.
9
Vt
8
5%
F/Fini
7
6
3%
5
1%
4
0.5%
3
2
This numerical analysis highlights the soil/structure
interaction during shallow tunneling with TBM. The
attention was focused on the influence of the volume
loss in tunnel.
The presence of the structure increases the surface
settlement for a volume loss in tunnel higher than 1%,
in comparison to the Greenfield case.
Due to the presence of a raft with a great axial stiffness and the fact that the raft is bound with the soil,
the horizontal displacements are negligible under the
structure in comparison with the Greenfield case.
This study has showed that the more affected direction of the building during tunneling is the transverse
direction. Moreover, transversal loads are keeping
important values at the final state whereas longitudinal loads are coming back to their initial values.
The analysis of the volume loss influence showed a
linear relation between volume loss in tunnel and forces
induced in the structure columns during tunneling.
1
0
0
10
20
30
40 50 60 70 80
Excavation length (m)
90 100 110
Figure 27. Evolution of maximum longitudinal forces in
columns.
F/Fini
60
50
Tx - final state
40
Ty - excavation of 77 m
y = 1032x
30
20
y = 171x
10
0
0
1
2
3
4
Volume loss in tunnel (%)
5
Figure 28. Maximum forces increase according to Vt.
different values of Vt. For each Vt, the shape of the
F/Fini evolution is similar but with higher values for
higher Vt.
When reporting the maximum values for the transversal and longitudinal forces according to the volume
loss in tunnel, Figure 27 shows a linear relation.
Maximum values for the transversal forces are obtained
at the final state, whereas maximum values for the
REFERENCES
AFTES 1999. Recommandations pour les tassements liés au
creusement des ouvrages en souterrain. Tunnels et
Ouvrages Souterrains: 106–128.
Benmebarek, S., Kastner, R. & Ollier, C. 1998. Auscultation
et modélisation numérique du processus de creusement à
l’aide d’un tunnelier. Géotechnique 48 (6): 801–818.
Dias, D., Kastner, R. & Maghazi, M. 1999. Three dimensional
simulation of slurry shield tunneling. In International
Symposium on Geotechnical Aspects of Underground Construction in Soft Ground, Tokyo, Japan, 6p.
Franzius, J.N. & Addenbrooke, T.I. 2002. The influence of
building weight on the relative stiffness method of predicting tunnelling-induced building deformation. In 4th
Symposium Geotechnical Aspects of Underground Construction in Soft Ground, Toulouse, France, 1, 53–58.
Miliziano, S., Soccodato, F.M. & Burghignoli, A. 2002.
Evaluation of damage in masonry buildings due to tunnelling in clayey soils. In 4th Symposium Geotechnical
Aspects of Underground Construction in Soft Ground,
Toulouse, 3, 49–54.
Mroueh, H. & Shahrour, I. 2003. A full 3-D finite element
analysis of tunneling-adjacent structures interaction. Computers and Geotechnics 30: 245–253.
Netzel, H. & Kaalberg, F.J. 2000. Numerical damage risk
assessment studies on masonry structures due to TBMTunnelling in Amsterdam. In GeoEng 2000, Melbourne,
Australia, 235–244.
O’Reilly, M.P. & New, B.M. 1982. Settlements above tunnel
in the United Kingdom – their magnitudes and prediction.
In Tunelling 82’, London, IMM, 173–181.
143
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-17.qxd 08/11/2003 20:27 PM Page 144
Oteo, C.S. & Sagaseta, C. 1982. Prediction of settlements
due to underground openings. In Int. Symp. On numerical Models in Geomechanics, Zurich, 653–659.
Panet, M. 1995. Le calcul des tunnels par la méthode
convergence-confinement. Paris: Presses de l’ENPC.
Peck, R.B. 1969. Deep excavation and tunnelling in soft
ground, State of the art report. In 7th International
Conference on Soil Mechanics and Foundation Engineering, Mexico, 225–290.
Potts, D.M. & Addenbrooke, T.I. 1997. A structure’s influence
on tunnelling induced ground movements. In Instn Civil
Engineers in Geotechnical Engineering. 125, 109–125.
Ribeiro e Sousa, L., Dias, D. & Barreto, J. 2003. Lisbon
Metro Yellow Line extension. Structural behaviour of the
Ameixoeira Station. In 12ª Conferência Panamerican on
Soil Mechanics and Geotechnical Engineering, Boston.
Sagaseta, C. 1987. Evaluation of surface movements above
tunnels, a new approach. In Colloque International ENPC
Interactions sol/structure, Paris, Presses ENPC, 445–452.
Standing, J.R., Gras, M., Taylor, G.R., Gupta, S.C., Nyren,
R.J. & Burland, J.B. 2002. Building response to tunnel
step-plate junction construction – the former Lloyds
Bank building, St James’s, London. In 4th Symposium
Geotechnical Aspects of Underground Construction in
Soft Ground, Toulouse, France, 3.
Swoboda, G., Mertz, W. & Schmid, A. 1989. Three dimensional numerical models to simulate tunnel excavation.
Numerical Models in Geomechanics NUMOG III.
Elsevier. 581–586.
144
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-18.qxd 08/11/2003 20:28 PM Page 145
FLAC and Numerical Modeling in Geomechanics, Brummer et al. (eds)
© 2003 Swets & Zeitling, Lisse, ISBN 90 5809 581 9
Application of FLAC3D on HLW underground repository
concept development
S. Kwon, J.H. Park, J.W. Choi & W.J. Cho
Korea Atomic Energy Research Institute, Korea
ABSTRACT: For the safe design of a deep underground high-level radioactive waste (HLW) repository, it is
important to understand the thermal–mechanical behavior of the engineering barriers and rock mass around the
repository influenced by the high stress and the heat generated from the waste. In this study, thermal–mechanical coupling analysis was carried out to investigate the reliability of the Korean HLW repository concept using
FLAC3D with the thermal and mechanical properties of rock and rock mass measured at two drilling sites. For
effective thermal–mechanical coupling, a FISH routine was developed and used for the modeling of different
conditions. By using FLAC3D with the FISH routine, the evaluation of the thermal–mechanical stability of the
preliminary disposal concept could be done successfully.
1 INTRODUCTION
The Republic of Korea began operating commercial
nuclear power plants in 1978. Now there are 17 operating plants, 4 CANDU (Canadian Deuterium Uranium
Reactor) and 13 PWR (Pressurized Water Reactor).
The current generating capacity is 14,720 MWe with
a share of 39.3% of the total production of electricity.
The total generating capacity is expected to be about
26.05 GWe by 2015. The cumulative amount of spent
fuel from existing nuclear power plants reached 5,641
MTU by June 2002. It is expected that approximately
11,000 MTU and 19,000 MTU will be accumulated
by the years 2010 and 2020, respectively.
In Korea, a reference HLW disposal system is under
development. According to the previously determined
disposal concept, the PWR and CANDU spent fuel in
corrosion resistant canister will be emplaced in a deep
underground repository constructed in crystalline rock
such as granite. To confirm whether the disposal concept is reliable or not under certain geological conditions, waste type, and operation procedure, computer
simulations need to be carried out. FLAC3D had been
widely applied in radioactive waste repository projects
related to different rock types by many researchers
(Johansson & Hakala 1995, Berge & Wang 1999,
Fairhurst 1999, Francke et al. 2001, and Patchet et al.
2001). In Korea, FLAC3D had already been used for
the thermal analysis (Park et al. 1998) and mechanical
analysis (Park et al. 2001) for Korean reference repository design.
In this study, FLAC3D was used for investigating
the thermal–mechanical coupling behavior of rock,
buffer, backfill, and canister. In order to carry out
the thermal–mechanical coupling analysis, a FISH
routine was developed and used for the modeling to
investigate the coupling behavior of the rock mass
around the disposal tunnel and deposition hole.
2 HLW REPOSITORY CONCEPT IN KOREA
The Korea Atomic Energy Research Institute has been
developing a reference HLW disposal system since
1997. According to the preliminary disposal concept,
the repository is located in a crystalline rock mass at
several hundred meters below surface. Like many
other countries such as Sweden, Canada, Finland,
Switzerland, and Japan, a multibarrier system consisting of canister, buffer, and backfill is supposed to be
applied for safe containment of the radioactive waste.
The buffer acts as a barrier to suppress the detrimental
effects of the corrosive water in the host rock and to
enhance the life of the container and serves as a geochemical filter for the sorption of radionuclides. The
buffer dissipates the decay heat from the waste into
the surrounding rock to avoid the possibility of thermal
stress on the container. It also provides the mechanical
strength to support the canisters and isolates the containers from detrimental rock mass movements
(Selvadurai & Pang 1990). In many countries including
Korea, bentonite is now considered as the buffer
145
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-18.qxd 08/11/2003 20:28 PM Page 146
40m
TB: Backfill thickness(1.5m)
BT: Upper buffer thickness(1m)
FT: Bottom & side buffer
thickness(0.5m)
6m
7m
6m
2.2m
TB
BT
Backfill
Buffer
Outshell
Canister
Spent Fuel
Deposition
Hole
FT
Figure 1. Schematic drawing of the reference Korean repository design.
material because of its low hydraulic conductivity, high
sorption capacity, self-sealing characteristics, and
durability in nature.
In the Korean repository concept, the mixture of
bentonite and crushed rock will be used as the backfilling material. The deposition tunnels are 6 m wide
and 7 m high. The canister containing spent fuel is
assumed to be emplaced in the vertical boreholes
drilled along the center line on the floor as shown in
Figure 1.
3
3.1
Table 1. Material properties of fuel part and outshell.
Unit
Material type
Model type
E
Density
Thermal conductivity
Specific heat
Thermal expansion
GPa
Kg/m3
W/m°K
J/Kg°K
/°K
Fuel part
Outshell
Fuel
cast iron
Elastic
190
0.3
6500
43
424
1.2e-5
Stainless
steel
Elastic
200
0.3
8000
15.2
504
8.2e-6
FLAC3D MODELING
Materials in the model
3.1.1 Fuel part and outshell
Four PWR assemblies are inserted in a canister with
outshell thickness of 5 cm. The mechanical and thermal
properties of the fuel part, which represents the part
inside of the outershell, were determined with the
assumption of that the fuel and cast iron were uniformly
mixed. The average properties of the fuel part were
calculated based on volume ratio and listed in Table 1.
Among the candidate material types for the outshell,
stainless steel was considered in this study. The diameter of the canister is 1.22 m and the length is 4.78 m.
The thermal–mechanical properties of stainless steel
are also listed in Table 1.
3.1.2 Buffer and backfill
Some of the thermal and mechanical properties of
buffer and backfill material could be determined from
laboratory tests using Korean bentonite (Kyungju
bentonite), which is considered as a candidate buffer
material for the Korean repository. The other material
properties, which could not be determined from tests,
were chosen from literature review and listed in Table 2.
In this study, the buffer and backfill materials were
modeled with a Drucker-Prager plastic model. The
Drucker-Prager parameters in Eq. (1) for buffer and
backfill could be determined from the triaxial compression tests under different confining pressures.
(1)
where, ! and kshear are material parameters, J1 is
the first invariant of the stress tensor, and J2D is the
second invariant of the deviatoric stress tensor
(Desai & Siriwardane 1984).
146
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-18.qxd 08/11/2003 20:28 PM Page 147
Table 2. Material properties of buffer and back fill.
Rock
Unit
Material type
Model type
Modulus
GPa
Density
T. Conductivity
Specific heat
T. Expansion
UCS
Cohesion
Friction angle
Drucker-Prager
parameters
Kg/m3
W/m°K
J/Kg°K
/°K
MPa
MPa
Degree
Geothermal gradient
°C/km
Buffer
Backfill
Kosung
Yusung
Bentonite
Drucker-Prager
Bulk 0.345
Shear 0.258
Dry 1800
1.47
888
3.1e-4
7.66
1.1
50
Qvol 1.23
Crushed rock bentonite
Drucker-Prager
Bulk 0.038
Shear 0.029
Dry 1800
2.04
900
3.1e-4
0.93
1.1
17
Qvol 0.24
Granite
Mohr-Coulomb
E 56.6
0.25
2650
2.523
1576
19.244e-6
149.55
22.5
61
Granite
Mohr-Coulomb
E 46.8
0.28
2660
3.541
1212
19.312e-6
132.5
30.4
51
Kshear 944
Kshear 1472
37.5
25
3.1.3 Rock properties
It is assumed that the underground repository is constructed in a granite body at 500 m below surface. The
mechanical and thermal properties of the granites
from two drilling sites, Kosung and Yusung, are listed
in Table 2. The two sites are representing the east and
west sides of Korean Peninsula. NX size rock cores
were retrieved from the drill holes reached up to 500 m
below surface.
The influence of discontinuities is considered indirectly using the equations proposed by Fossum (1985)
to calculated the modulus of randomly jointed rock
mass. The effective bulk and shear moduli can be written in terms of the intact and joint properties. Effective
bulk and shear moduli are
(2)
(3)
where, E is Elastic modulus of rock, is Poisson’s
ratio, S is joint spacing, and kn and ks are normal and
shear stiffness of joint. Thermal logging was carried out
to find the geothermal gradients at the two sites (Park
et al. 2001).
3.2
Modeling method
Thermal–mechanical coupling is important due to the
thermal stress developed by the decay heat from the
waste. Subsequent heating of the rock mass by the
heat-generating waste would increase the stresses in
the buffer, canister, and rock mass because of thermal
expansion (Simmons & Baumgartner 1994). The
thermal stress due to the thermal expansion can be
calculated as follows:
(4)
where, is increase in stress due to the expansion
of rock, is thermal expansion coefficient, T
is temperature increase, E is Young’s modulus, and
is Poisson’s ratio. FLAC3D has functions for coupling behaviors such as hydraulic–mechanical,
thermal–mechanical, and thermal–hydraulic couplings.
In FLAC3D, the thermal–mechanical coupling occurs
only in one direction: temperature changes cause thermal strains to occur which influence the stresses, while
the thermal calculation is unaffected by the mechanical
changes taking place (Itasca 1996). As normal in most
modeling situations, the initial mechanical conditions
correspond to a state of equilibrium which must first
be achieved before the coupled analysis is started.
There are the following three suggestions for thermal–mechanical coupling in the FLAC3D manual.
1. A thermal only calculation is performed until the
desired time and then the thermal calculation is to
be turned off and the mechanical calculation is performed. When the mechanical equilibrium is
reached, thermal calculation is performed again.
2. For each thermal time step, several mechanical
steps are taken until detecting equilibrium condition.
3. The STEP command is used while both mechanical
and thermal modules are on. In this approach, one
mechanical step will be taken for each thermal step.
147
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-18.qxd 08/11/2003 20:28 PM Page 148
The first approach is useful for thermal–mechanical
analysis of an elastic model. For non-linear models
such as plastic models, the thermal change must be
communicated to the mechanical module at closer
time intervals to respect the path dependency of the
system. In this case, a certain number of mechanical
steps are taken for each thermal step to allow the system to adjust. In this approach, the transition from
thermal to mechanical calculation is based on time
instead of temperature variation. Since the heat generation is varying with time, the transition based on
temperature variation is more reasonable in the early
stage of the repository. The second and third approaches
may be more accurate than the first approach, but the
problem is that the calculation will take a long time to
model the long-term behavior of repository. In order
to overcome the disadvantages of the three approaches,
another technique for thermal–mechanical coupling
was developed. In the new approach, the transition
from thermal to mechanical calculation is based on
temperature change. A FISH program for the new
approach was developed for PWR spent fuel. Figure 2
shows the flow chart of the thermal–mechanical coupling adapted in this study.
3.3
In the model, 5 different materials, rock, buffer, backfill, outshell, and fuel part, were included. In the
Korean preliminary disposal concept, the backfill
thickness L1 1 m, upper buffer thickness L2 1.5 m,
bottom buffer thickness and side buffer thickness
L3 0.5 m.
3.3.2 Initial and boundary conditions
The in situ stress was assumed to be hydrostatic in
this study based on the fact that the stress ratios in
Yusung and Kosung sites are more or less 1.0 at 500 m
depth. The initial temperature in the model was calculated with the geothermal gradients of Yusung and
Kosung sites. It was assumed that the average surface
temperature is 20°C.
3.4
Decay heat
Decay heat is the thermal energy resulting from the
radioactive decay of the radioactive materials in the
spent fuel discharged from reactors. In Korea, the PWR
spent fuel with 45,000 MWd/tHM is now considered
as the reference PWR spent fuel, because that type of
Model mesh and boundary conditions
3.3.1 Model mesh
Figure 3 shows the model mesh around the deposition
tunnel and deposition hole. The model mesh around
the disposal tunnel and deposition hole located at the
center of the whole model mesh, which covers from
surface to 1000 m level. The backfilling material in
the disposal tunnel is not shown in the figure to clearly
show the model mesh of the floor and deposition hole.
Figure 2. Flow chart of the TM coupling.
Figure 3. Model mesh around the tunnel and deposition hole.
148
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-18.qxd 08/11/2003 20:28 PM Page 149
spent fuel occupies 64% of all spent fuel from Korean
reactors. Even though significant amount of CANDU
spent fuel with 7500 MWd/tHM is generated from
CANDU reactors, CANDU spent fuel is not considered
in this study, because of its much lower burnup compared to PWR spent fuel. For the spent fuel with 45,000
MWd/tHM, the heat decays exponentially with time
as following:
(5)
where, t is time (year) after discharge from reactors.
FLAC3D MODELING RESULTS
4
4.1
Temperature
Temperature (deg. C)
In order not to lose the required properties of bentonite buffer, the maximum temperature at the canister
surface and throughout the buffer must not exceed
100°C. As shown in Figure 4, the highest temperature
in the Kosung case was 92.97°C at 15 years after
emplacement, while it was about 80.71°C in 20 years
after emplacement in Yusung case. Since the highest
temperatures in the model in both cases are lower
than 100°C, the peak temperature in the buffer cannot
100
95
90
85
80
75
70
65
60
55
50
Kosung case
Yusung case
0
50
100
150
200
Time after emplacement (year)
250
Figure 4. Variation of maximum temperature with time for
Kosung and Yusung case.
be higher than 100°C and thus the disposal design can
satisfy the thermal criteria.
Because of the higher geothermal gradient in
Kosung area, the temperature around the repository in
the Kosung case is higher than in the Yusung case.
From Figure 4, it is possible to see when the transitions
between mechanical and thermal steps had happened.
At the 500 m deep location, the initial temperature in
the Kosung case was 38.75°C while the temperature
in the Yusung case was 32.5°C. The initial temperature difference due to the difference in geothermal
gradient was about 6°C. Table 3 lists the temperatures
at the checking points at 20 years and 200 years after
the emplacement of canister. The difference in temperature after 20 years in the Kosung and Yusung
cases ranges from 8 to 12.4°C, which is higher than
the initial temperature difference. The increase of
temperature difference is due to the lower thermal
conduction in Kosung case, which has lower thermal
conductivity than that in Yusung case. With increase
in time, the temperature difference between the two
cases decreased and it was about 7–9°C at 200 years
after emplacement.
4.2
Displacement
In the deposition hole, the heat from the waste will
lead to thermal expansion of the canister, buffer, and
backfill. The displacements around the tunnel will also
be influenced by the heat generation from the deposition hole. Since the thermal and mechanical properties
of rock are different in the Yusung and Kosung cases,
the displacements around the disposal tunnel and
deposition hole are different. Figure 5 shows the displacement plot around the deposition tunnel at 200
years after the emplacement of the canister and buffer.
In Yusung case, the maximum displacement, which is
recorded at the upper backfill, was about 19 cm, while
it was about 23 cm in Kosung case. The upward displacement from the deposition hole to the tunnel is
Table 3. Temperatures (°C) at the checking points and different time for Kosung and Yusung
cases.
20 years
200 years
Check points
Kosung
Yusung
Difference
Kosung
Yusung
Difference
1
2
3
4
5
6
7
8
9
92.84
92.51
80.62
72.77
65.72
69.42
89.46
89.44
76.42
80.72
80.39
68.19
62.45
57.60
60.35
77.73
77.53
64.76
12.12
12.13
12.43
10.32
8.12
9.07
11.74
11.91
11.66
81.95
81.83
77.70
74.97
72.32
73.66
80.78
80.79
76.29
72.68
72.56
68.32
66.33
64.52
65.51
71.65
71.59
67.17
9.27
9.27
9.38
8.65
7.80
8.15
9.13
9.20
9.12
149
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-18.qxd 08/11/2003 20:28 PM Page 150
of the outshell in 20 years is downward while the other
parts show upward displacement. This can be explained
by the tensile stresses developed in the outshell. The
direction change of displacement at the outshell bottom
to upward in 200 years does not mean that the tensile
stresses disappeared, but the difference of displacement along the outshell shows that there are tensile
stresses in the canister. In the Kosung case, the maximum displacement at the outshell is about 1.1 cm,
which is a little larger than that in Yusung case.
4.3
Figure 5. Displacement plot around the excavation in Yusung
and Kosung sites.
Stress distribution
Figure 7 shows the principal stress distribution at the
canister in the Yusung case. The minimum principal
stress was compressive and the magnitude was up to
18 MPa. The maximum principal stress was tensile and
it was up to 28 MPa. The tensile stress needs to be
considered as an important factor in the disposal concept design, since it may cause mechanical failure of
canisters. It is important to check von-Mises stress,
because the distribution of von-Mises stress is closely
related to the mechanical stability of rock opening.
Figure 8 shows the von-Mises stresses at the checking points. At the checking points, the calculated vonMises stresses from the Kosung case are higher than
those from Yusung case. In the case of checking point 3,
which represents the borehole surface, the von-Mises
in Kosung case is highest up to 75 MPa, while that in
the Yusung case is about 40 MPa. The higher stress
distribution in the Kosung case might be due to the
higher temperature as well as more stiff rock properties at the Kosung site.
5 CONCLUSIONS
In this study, thermal–mechanical coupling analysis
for the preliminary Korean disposal concept had been
carried out using FLAC3D. In order to overcome the
disadvantages of the previous approaches for thermal–mechanical coupling, a new method based on
temperature variation was suggested and a FISH routine was developed. From the studies, the following
conclusions could be drawn:
Figure 6.
Displacement plot at outshell.
thought to be mainly from the thermal expansion of
the materials inside of the deposition hole.
Buffer movements can cause the canister to move
in the deposition hole. In order to check the displacement pattern in the canister, the displacements at the
outshell were plotted in Figure 6. The displacements
in 20 years after emplacement were relatively smaller
than those in 200 years. One interesting thing in the
figure is that the displacement direction at the bottom
– In both Kosung and Yusung cases, the maximum
buffer temperature was found to be lower than
100°C, which is the most critical criteria for disposal
concept design.
– When using the geological information from the
Kosung drilling site, it was found that the maximum
temperature was 92.97°C in 15 years after emplacement, while it was 80.71°C in 20 years when the
Yusung data were used. This could be explained with
the higher geothermal gradient and lower thermal
conductivity in Kosung site.
150
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-18.qxd 08/11/2003 20:28 PM Page 151
Figure 7. Principal stress contours at the canister for Yusung case, 200 years after emplacement.
80
Mises stress (MPa)
70
Kosung
Yusung
60
50
40
30
20
10
0
1
2
3
4
6
5
Check Points
7
8
9
Figure 8. Comparison of von-Mises stress at different locations for Kosung and Yusung cases.
– From the fact that the peak temperature around the
repository is reached in several tens of years after
the emplacement of canister, modeling up to several tens of years are good enough for the sensitivity analysis, which is mainly for investigation the
relative influence of design parameters.
– The stress distribution on the canister surface
shows that the tensile stress is highest at lower part
of the canister. The maximum principal stresses
were tensile and it was up to 26 MPa and 28 MPa in
Yusung and Kosung cases, respectively. Such a
tensile stress may induce catastrophic failure of the
outshell and thus needs to be carefully analyzed.
– FLAC3D with FISH function could be successfully
applied to evaluate the thermal–mechanical stability of the Korean preliminary repository design in
deep underground rock.
REFERENCES
Berge, P.A. & Wang, H.F. 1999. Thermomechanical Effects
on Permeability for a 3-D Model of YM Rock, Bernard
Amadei et al. (eds), Proceedings of the 37th U.S. Rock
Mech. Symp., Vail, Colorado, June 1999, Vol. 2: 729–749.
Rotterdam: Balkema.
151
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-18.qxd 08/11/2003 20:28 PM Page 152
Desai, C.S. & Siriwardane, H.J. 1984. Constitutive laws for
engineering materials, Prentice-Hall, Inc., Englewood
Cliffs, NJ.
Fairhurst, C. 1999. Rock Mechanics and Nuclear Waste
Repositories. S. Saeb and C. Franke (eds), Proceedings
of the International Workshop on the Rock Mechanics of
Nuclear Waste Repositories, Vail, Colorado, June 1999:
1–43. Alexandria, Virginia: American Rock Mechanics
Association.
Fookes, P.G. 1995. Aggregates: a review of prediction and
performance, Proceedings of STATS 21st Anniversary
conference, London, UK: 91–170.
Francke, C.T., Saeb, S. & Carrasco, R.C. 2001. ThreeDimensional Analysis of Nuclear Waste Disposal in
Horizontal Boreholes, Proceedings of the 38th U.S. Rock
Mechanics Symposium, Washington, D.C., July 2001, Vol. 1:
497–503. Lisse, The Netherlands: Swets & Zeitlinger B.V.
Itasca Consulting Group, Inc. 1996. FLAC3D – Fast
Lagrangian Analysis of Continua in Three-Dimensions,
Ver 1.1 User’s Manual. Minneapolis, MN: Itasca.
Johansson, E. & Hakala, M. 1995. Rock Mechanical Aspect
on the Critical Depth for a KBS-3 Type Repository Based
on Brittle Rock Strength Criterion Developed at URL in
Canada, SKB, AR D-95-014, SKB.
Kwon, Y.J., Kang, S.W. & Ha, J.Y. 2001. Mechanical structural stability analysis of spent nuclear fuel disposal
canister under the internal/external pressure variation,
KAERI/CM-440/2000, KAERI.
Park, J.H., Kuh, J.E. & Kang, C.H. 1998. An examination of
thermal analysis capability of FLAC3D on the near field
of high level radioactive waste repository, KAERI/TR1187/98, KAERI
Park, B.Y., Bae, D.S., Kim, C., Kim, K.S., Koh, Y.K. & Jeon,
S.W. 2001. Evaluation of the Basic Mechanical and
Thermal Properties of Deep Crystalline Rocks, KAERI/TR1828/2001, KAERI.
Park, J.H., Kwon, S., Choi, J.W. & Kang, C.H. 2001.
Sensitivity analysis on mechanical stability of the underground excavations for a high-level radioactive waste
repository, KAERI/TR-1749/2001, KAERI.
Patchet, S.J., Carrasco, R.C., Francke, C.T., Salari, R. &
Saeb, S. 2001. Interaction Between Two Adjacent Panels
at WIPP,” in Rock Mechanics in the National Interest,
Proceedings of the 38th U.S. Rock Mechanics Symposium,
Washington, D.C., July 2001), Vol.: 517–523. Lisse, The
Netherlands: Swets & Zeitlinger B.V.
Selvadurai, P.S. & Pang, S. 1990. Mechanics of the interaction between a nuclear waste disposal container and a
buffer during discontinuous rock movement, Engineering
Geology, Vol. 28: 405–417.
Simmons, G.R. & Baumgartner, P. 1994. The disposal of
Canada’s nuclear fuel waste: Engineering for a disposal
facility, AECL Research, AECL-10715, AECL.
152
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-19.qxd 08/11/2003 20:28 PM Page 153
FLAC and Numerical Modeling in Geomechanics, Brummer et al. (eds)
© 2003 Swets & Zeitlinger, Lisse, ISBN 90 5809 581 9
Numerical simulation of radial bolting: Application to the
Tartaiguille railway tunnel
F. Laigle
Electricité de France, Hydro Engineering Centre, France
A. Saïtta
Centre d’Etudes des Tunnels, Lyon, France
ABSTRACT: In this paper, a numerical model is used to predict radial bolting performance in soft rocks crossed
by the Tartaiguille TGV (high speed railway) tunnel located on the new TGV French southeast line. First, a brief
description of results of field investigations and monitored displacements during excavation of this underground tunnel are done. The support system is constituted by shotcrete and radial grouted bars. Because of too
high monitored displacements in some sections in these marls, a modification of the support system has been
decided on site. This modification consists in an increasing of the density of bars in a specific zone. Back analysis
confirmed the very strong efficiency of these additional bars in this case. However, conventional continuous
modeling of the tunnel done up to now, strongly underestimated the real contribution of these extra bolts. Some
new numerical simulations have been done using a constitutive model proposed by Laigle. This constitutive model
integrated in FLAC focuses on the post-peak behavior of rocks. It’s based on a simple and physical description of
the behavior of ground in this domain, with accurate evolutions of the cohesion and the dilatancy. This paper
describes numerical results obtained using this new constitutive model applied to the Tartaiguille tunnel case. The
significant monitored effect of additional grouted bars is well shown by this computation.
1 INTRODUCTION
Bolting corresponding to grouted bars or friction bolts
is a frequently used component in light support systems
when driving underground galleries. This technique
entails reinforcing a ring of ground around an excavation by introducing stiffer linear elements. This method,
both effective and inexpensive, is the basis for methods
of tunnel driving such as the new Austrian tunneling
method.
Bolt design has been based for a long time on empirical rules and on an optimization during the works
themselves. At the present time, we notice a very clear
evolution in design practices toward the frequent use
of numerical methods to the detriment of empirical
ones. However, there is considerable doubt about the
ability of models now used to correctly simulate
the effect of bolting. So we wanted to contribute to
this reflection reporting, in an applicable way, the
results obtained during the works on the Tartaiguille
tunnel. The support system installed in this Aptian
marls mainly consisted of grouted bars. In an initial
stage, this study has made it possible to accurately
quantify the influence of bolts on the deformations of
the tunnel wall. Beginning with these conclusions, it
then became possible to make a comparison with the
results of a numerical modeling.
In a second part of this paper, some numerical simulations are presented. These simulations are applied
to the Tartaiguille tunnel. Using a new elastoplastic
constitutive model developed by Laigle (2003), these
simulations allow to find by computation the strong
contribution of a grouted bars system on stability
conditions of the tunnel.
2 EXPERIMENT FEEDBACK FROM THE
TARTAIGUILLE TUNNEL
2.1
After the first “short” Paris-provinces lines, the highspeed train network has been extended in France and
first provincial towns will soon be connected to each
other. At the present time, the first line being completed
153
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
The new TGV southeast (high speed railway)
line and the Tartaiguille tunnel
09069-19.qxd 08/11/2003 20:28 PM Page 154
stresses. This ratio has been estimated from 1.2 to 1.7
while the project had concluded on lower values. The
major stress is horizontal which explains the crown
breaking mechanism of the shotcrete shell, subjected
to a lateral thrust.
The support system had to be modified to control
strains. The improvements, which made it possible to
significantly reduce convergences, are an increase in
the density of the radial bolting and their integral use
at the face. Convergences were brought to a tolerable
threshold for a double density of bolts when compared with the initial plan.
Our study of radial bolting is restricted to the geological formation composed of Aptian marls. This is
because of two advantages presented by this facies,
one being the homogeneity of the geology and the other
being the presence of a zone, the support system of
which is composed only of shotcrete and bolts. This
geological description comes from the geological and
geotechnical wrap-up paper, prepared by the engineering firm Coyne and Bellier (1995).
Figure 1. Layout of the Tartaiguille tunnel.
2.2
Figure 2. Cross section in Aptian marls.
is that of the TGV Southeast which should make it
possible to go from Paris to Marseilles in three hours.
After Valence, the Tartaiguille tunnel is the first of
underground structures in the southerly direction. It’s
a 2340 m long tunnel which has been driven from the
north and south extremities (Fig. 1).
Excavations began in February 1996. In the Aptian
marl geological formation, digging method retained
was the upper half-bench cut method (Fig. 2).
The support system is composed of radial bolts,
associated with shotcrete and sometimes with yielding
arches.
The tunnel driving cycle was broken down into the
excavation of the upper half-section and the laying of
the support system. Then, about a hundred meters in
back of the working face, a second station excavated the
lower half-section. Finally, further in back of the face,
a reinforced concrete invert, then the final concrete
lining was poured.
From the beginning of the driving in the Aptian
marls, major convergences of the tunnel wall were
measured. The alert thresholds were quickly exceeded
and the phenomenon grew with the passing of the lower
section. Strains of the wall resulted in a loading of the
shotcrete shell that was greater than its breaking limit
and a consistent cracking in crown, which generated
safety problems for the worksite.
Complementary tests then made it possible to estimate the ratio between horizontal and vertical initial
For our study, the support zone is 335 meters length
within which the support system is composed only of
shotcrete and radial bolts composed of grouted bars
4 meters in length. The reinforcement of the bolting of
the upper half-section takes place in several phases:
– Zone 1: One ring of bars every 2 meters (Fig. 2).
– Zone 2: 2 sets of bars inserted at the springing of
sidewalls.
– Zone 3: Return to the initial density (idem zone 1).
– Zone 4: Re-establishing interposed ring (idem
zone 2).
In order to monitor the evolution of the ground and
the efficiency of the support system, measurements of
wall displacements were performed. Five measurement
targets were used for each section, a target A, positioned
at the crown, two targets B and C at the spring lines of
the side walls of the upper half-section, and two targets
D and E at the side walls of the lower half-section
(Charmetton 2001).
2.3
Results of the measurements
The effectiveness of the support system during the driving was essentially monitored beginning with two values out of the three targets, which comprise each testing
section. These are the measurements of the leveling of
point A and of the convergence of cord BC. The measurements sections called S07, S08, S09 and S10 were
included in the Zone 1. The sections S11, S12, S13,
S14, S15, S16 and S17 were in the Zone 2. The sections S18, S19 and S20 measured displacements of
the Zone 3 while S21 and S22 were inside the Zone 4.
154
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
Study zone and measures carried out
09069-19.qxd 08/11/2003 20:28 PM Page 155
parameters (excavation speeds, steps of advancement,
cover height…) varied, but without our being able to
establish direct links between their evolution and that
of the two groups of curves of convergences.
The alternation of the two bolt densities along our
study zone is an argument which confirms the role of
the bolts because this assures that the evolution of the
convergences does not result from a modification of the
ground.
Number of days
0
50
100
150
200
250
300
0
S07
-20
S08
Convergences (mm)
S09
S10
-40
S11
S12
S13
-60
S14
S15
S16
-80
S17
3 NUMERICAL SIMULATIONS
S18
-100
S19
S20
The aim of these numerical simulations was to simulate
in the framework of usual continuous modeling the
strong effect of a grouted bars system on the stability
conditions of the Tartaiguille tunnel. The particularity
of this work is to use a new constitutive model developed by Laigle. These numerical simulations are done
using the elastoplastic version. A more general elastoplastic–viscoplastic version has been developed and
presented in another paper (2003).
Following phenomena are studied in the framework of these simulations:
S21
-120
S22
-140
Figure 3. Measurements of convergence of cords BC.
70
Convergences (mm)
-46%
: Average convergence
60
Zone 3
50
40
– What would be the behavior of the tunnel with an
under-estimated support and what was the potential
failure mechanism?
– Was a support system needed?
– What is the effect of a delay in the installation of the
support system?
– What is the effect of a local failure of the shotcrete
layer?
-37%
Zone 1
Zone 4
30
Zone 2
20
S17
S21
S22
0
S07
S08
S09
S10
S11
S12
S13
S14
S15
S16
S18
S19
S20
10
3.1
Measurement sections
Figure 4. Measurements of the convergences at 30 m from
the face.
So we interested ourselves, for each of the measurement sections, in these values, but also in the context in which they were obtained, that is, everything
that could have an influence on the results of the
measurements.
The following graphs present the results, which
come directly from the worksite of the convergences
of the cords BC for sections S07 to S22 (Fig. 3).
2.4
Study of the results of the upper half-section
The calculation of the average convergence at 30 m for
each of the zones (see Fig. 4) shows a reduction of 37%
between Zone 1 and Zone 2, and 46% between Zone 3
and Zone 4. The increase in the number of bolts at the
sidewalls (from 1 bolt/3.3 m2 to 1 bolt/1.6 m2) therefore
resulted in a reduction of at least 37% in short-term horizontal convergences of the BC cord. We may show that
this reduction is directly due to the bolting. All the other
155
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
The constitutive model
In general, at least for deep and no-urban tunnels, the
goal of a support system composed with shotcrete and
grouted bars is to prevent mechanical failure within a
sufficient safety level. In cohesive rocks, which can be
considered as a continuous material, this failure is associated with the development of a fracturing process
induced by the excavation. So, it seems necessary to
focus the simulation of the mechanical behavior both
on the pre-peak behavior and the post-peak behavior.
This new constitutive model has been written in the
framework of the elastoplastic theory The expression
of the yield surface corresponds to the generalized
Hoek and Brown criterion. This surface is governed
by 4 parameters, which are the unconfined compressive
strength and three other parameters “m”, “s” and “a”.
These 3 last parameters change in accordance with an
internal variable p, which is the irreversible shear
strain defined below:
(1)
Deviatoric stress
09069-19.qxd 08/11/2003 20:28 PM Page 156
(2)
Several thresholds for the yield surface are
proposed.
Some specific hardening laws are suggested for each
parameter “m”, “s” and “a” allowing to describe the
evolution of the yield surface from one threshold to
another (Laigle 2003). In the softening domain, the
negative hardening is assumed to be divided into three
phases:
Domain 3: Fissured rock in
post-peak domain
Domain 2: Fissured rock in
pre-peak domain
Volumetric strain
Domain 5: Fractured rock in a
residual state
Domain 4: Fractured rock
Axial strain
Figure 5. Schematic behavior of a rock sample during a
triaxial test.
5
Maximal principal stress (MPa)
– The first phase of softening corresponds to a deterioration of the rock’s cementation illustrated by a
progressive disappearance of the cohesion at the
macroscopic scale. This first phase is associated
with an increasing of the dilatancy.
– The second phase corresponds to the shear of an
induced fracture. It’s associated with a decreasing of
the dilatancy at the macroscopic scale.
– Finally, the last domain corresponds to a purely frictional behavior, which defines the residual strength.
The shear occurs without any volumetric strain.
Figure 5 shows schematically various domains
describing the physical state of a rock sample under a
mechanical triaxial loading. In the domain 1, the
behavior is elastic linear.
Figure 6 presents thresholds retained for the Aptian
marl of Tartaiguille. Major mechanical properties are as
following:
Domain1: Intact rock
Axial strain
– A first threshold corresponds to the damage criterion. This criterion is assimilated to the crack initiation, so to the beginning of the dilatancy.
– The second threshold corresponds to the peak
strength criterion.
– The third threshold characterizes the strength of a
damage rock sample crossed by an induced shear
fracture. In these conditions, cohesion of the rock
at a macroscopic scale is assumed to be null.
– The last criterion corresponds to the residual strength
criterion, which is reached at very large shear strains.
4.5
4
ual
id
Res
3.5
3
Peak criterion
2
rit
kc
2.5
d
ure
roc
age
Dam
on
eri
n
erio
crit
rion
crite
ct
Fra
1.5
1
0.5
0
0
0.5
1
1.5
2
2.5
3
Minimal principal stress (MPa)
Figure 6. Threshold criteria for the Aptian marl.
This constitutive model has been integrated in
the EDF’s local version of FLAC V3.4, using FISH
procedures.
decreasing initial internal stresses applied to the tunnel
perimeter. Excavation is simulated in two phases: the
vault and the bench. Figure 7 shows the state of the rock
mass at a decrease of 97.8% of these stresses during
the vault excavation (100% corresponds to the end of
excavation process of the vault). We may observe an
important damage zone near the foot of the tunnel,
progressing behind sidewalls towards the roof.
Without any support, this mechanism will generate a
global instability of the gallery in the short term.
3.2
3.3
– UCS 0.85 MPa
– Young’s modulus: E 1000 MPa
– Poisson ratio: 0.36
Behavior of the tunnel without support
A first simulation has been done without considering
any support system. The excavation is simulated by
A second simulation has been done considering the initial support system (Zone 1, ring of grouted bars every
156
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
Behavior of the tunnel with initial support
09069-19.qxd 08/11/2003 20:28 PM Page 157
Horizontal convergence of the tunnel (mm)
Time (days)
Fissured rock (Domain 2)
Rock in tension
Fractured rock (Domain 4)
Fissured rock in postpeak domain (Domain 3)
0
-1
-2
-3
-4
-5
-6
-7
-8
-9
-10
-11
-12
-13
-14
-15
-16
-17
-18
-19
-20
0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
With initial support
Failure
Without any support
Figure 9. Horizontal convergence of the vault without and
with an initial support system.
Intact rock (Domain 1)
Deconfinement: 97,8 %
Development of the
induced fractured
zone
Figure 7. Physical state of rock without any support.
Fractured rock
(Domain 4)
Strains of
bolts
Fractured rock
( Domain 4)
Fissured rock in
the pre-peak
domain
(Domain 2)
Fissured rock Fissured rock in
( Domain 3) the pre-peak
domain
( Domain 2)
Intact rock
(Domain 1)
Figure 10. Physical state of rock during the bench excavation and failure mechanism.
Intact rock (Domain1)
Figure 8. Physical state of rock at the end of the upper-half
excavation.
2 meters). Bars are simulated using structural cable
elements and a shotcrete layer using structural beam
elements. These bars and beams are installed after a
deconfinement of 70%, so approximately in the first
2 meters behind the face heading.
Bars are linked to some beam nodes with the goal
to simulate face plates. Despite this, we will observe
that the maximum tensile stain is located in the
ground and not near the wall (Fig. 8)
With this support, the stability of the tunnel during
the upper-half excavation can be theoretically justified, even if a damage zone exists near tunnel the foot
of the tunnel (Fig. 8). Figure 9 presents horizontal
convergences versus time, assuming an advancing rate
of 2 m/day. These simulations don’t take into account
the time. Convergences are drawn versus time only to
compare with monitored values.
Without any modification of this initial support, the
excavation of the bench can’t be finalized. Because of
the bench excavation, the fracturing phenomenon takes
off again toward the roof. The initial support is not sufficient to stop the development of this damage zone.
The stability cannot be demonstrated from this numerical simulation (Fig. 10).
These results seem in accordance with the site
engineer’s decision to adapt the support system. Considering high measured displacements and the development of a local failure of the shotcrete layer at the
roof, he decided to reinforce this initial support system.
157
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
Fissured rock in the
post-peak domain
(Domain 3)
09069-19.qxd 08/11/2003 20:28 PM Page 158
Horizontal convergence (mm)
0
Fractured rock
(Domain 4)
Intact rock
(Domain 1)
Rock at residual state
(Domain 5)
Fissured rock in
post-peak domain
(Domain 3)
Fissured rock
in the pre-peak
domain
(Domain 2)
Figure 11. Physical state of rock at the end of the bench
excavation, considering a reinforced support system.
3.4
Behavior of the tunnel with a reinforced
support
The reinforcement of the support system corresponds
to the installation of additional bolts on sidewalls of
the tunnel. In this zone, the bolting density is double.
In the framework of numerical simulations, several
patterns are considered:
– 2 additional grouted bars are installed on each sidewall at 6 meters behind the face heading (90% of the
vault deconfinement).
– 1 additional grouted bar is installed on each side wall
as soon as possible, about 2 meters from the face
heading (70% of the vault deconfinement).
In these 2 last cases, it appears that theoretically,
the stability is demonstrated both during the vault and
the bench excavation. The local increase of the bolting density prevents the development of induced fractures, which appear on the sidewall during the vault
excavation. The precise location of these additional
bolts is essential. We understand that an increase of
the bolting density on the roof is not useful for the
goal to delay and stop the observed mechanics on site.
A second interesting aspect is the effect of the time
at which additional bolts are installed. Figure 12
shows that the final horizontal convergence is smaller
with only one additional grouted bar installed earlier
rather than 2 bars added later.
These simulations highlight very well what project
engineers already knew but which has never been
Time (days)
10
20
30
40
50
Excavation of vault
60
70
80
Excavation of bench
-5
-10
-15
Without additional bolt
-20
-25
With 1 additional
bolt at 70%
With 2 additional
bolts at 90%
Failure
Figure 12. Influence of reinforced bolting pattern of horizontal convergences.
shown by numerical computations. With the aim of
reinforcing the rock mass, the grouted bars system
has to be installed as early as possible, before any critical increasing of monitoring displacements. This is
because the goal of this type of support is to protect
and help the rock to keep a sufficient shear strength to
ensure the global stability.
3.5
Effect of a local failure of the shotcrete lining
During excavation of the vault, a crack appeared and
developed in the shotcrete at the crown of the
Tartaiguille tunnel. This same phenomenon has been
observed during excavation of one large cavern of
the CERN-LHC project in Geneva (Laigle 2002).
Depending on the support design, a shotcrete failure
could be critical for the global stability of the tunnel.
However, in these two previous cases, the support has
been designed with the consideration that one major
component is the grouted bars system and not only
the shotcrete layer. If the shotcrete keeps an essential
function, it can’t be assimilated in these cases to a
continuous shell like in the SCL approach.
In the case of Tartaiguille tunnels, it was interesting to know if this crack in the shotcrete was really
critical from a global stability point of view. A simulation has been done, considering the reinforced bolting system on sidewalls. Cracking of the shotcrete
layer has been simulated by deleting some structural
elements near the crown. This deletion is done at 90%
of the vault deconfinement.
Figure 13 shows the physical state of the rock mass
at the end of the tunnel excavation. The local failure
of the shotcrete generates new damage and a fractured zone above the tunnel roof. The growth of this
new fractured zone is stopped by grouted bars.
Figure 14 presents the evolution of the horizontal
convergence in accordance with time, with and without failure of the shotcrete. An increase of displacement appears at the time of the failure but a new
stable configuration is reached after that.
158
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
0
09069-19.qxd 08/11/2003 20:28 PM Page 159
Time (days)
0
0
10
20
30
40
50
60
70
80
Horizontal convergence (mm)
-5
Crack in the shotcrete
Fractured rock
(Domain 4)
Fissured rock in the
post-peak domain
(Domain 3)
Horizontal convergence (mm)
30
40
50
60
70
80
-5
-10
Without failure of the shotcrete layer
-15
With failure of the shotcrete layer
-20
-25
-30
-35
-40
Figure 14. Influence of a local shotcrete failure on horizontal
convergences.
3.6
Justification of the length of bars
Some computations have been done considering several lengths for grouted bars. Figure 15 shows horizontal convergences versus time, in accordance with
these lengths. If the length is greater than 4 m, global
stability is assured. On the contrary, if this length is
2 m or less, a stable configuration can’t be obtained
and stability of the tunnel can not be justified during
the bench excavation.
From these results, we may conclude that there is
an optimal length for grouted bars, depending on the
potential failure mechanism of the tunnel during the
excavation process. These numerical results confirm
usual formulas, which provide an estimation of the
-35
-40
Length: 2m
Failure
L 2 0.2D 4.7 m
L 0.30D 4.0 m
where D is the tunnel span in meters.
4 CONCLUSIONS
The study of monitored convergences in the Aptian
marls of the Tartaiguille Tunnel has made it possible
to approach quantitatively the effect of bolting on the
structure’s stability. We were able to confirm the very
considerable efficiency that a few extra bolts bring to
a mass of non-fractured soft rock. This back analysis
has made it possible to quantify the effect of reinforcing the sidewalls on the reduction of convergences in
the Tartaiguille tunnel.
In the framework of a back analysis, some numerical computations have been done considering a new
constitutive model well adapted to underground engineering expectations. Goals of these simulations were
to find with a suited numerical tool major behaviors
observed and monitored during the Tartaiguille tunnel
digging.
These simulations allow us to identify:
– The potential major failure mechanism of the tunnel. The knowledge of this mechanism is essential
both during the design phase and during excavation process.
– The significant efficiency of a grouted bar system
on tunnel stability conditions.
– The effect of a local reinforcement of the bolting
system on displacements and safety level during
the digging.
– The limited effect of a local shotcrete failure if the
grouted bar system is sufficient and if the stability
is not only ensured by a shotcrete shell.
159
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
-30
length in accordance with the span of the tunnel:
Time (days)
20
Length 8m
Length: 6m
Length: 4m
-25
Figure 15. Influence of bolt lengths on horizontal
convergences.
0
10
-20
-50
Figure 13. Physical state of rock at the end of the bench
excavation, considering a local failure of the shotcrete.
0
-15
-45
Fissured rock in the
pre-peak domain
(Domain 2)
Intact rock
(Domain 1)
-10
09069-19.qxd 08/11/2003 20:28 PM Page 160
REFERENCES
Charmetton, S. 2001. Reinforcement des parois d’un tunnel
par boulons expansifs – retour d’expérience et étude
numérique. Ecole Centrale de Lyon. Ph.D. Thesis, 2001
(In French).
Coyne and Bellier. 1995. Geological and geotechnical wrapup paper. Mediterranean TGV. Tartaiguille tunnel (In
French).
Laigle, F. 2001. CERN-LHC Project – Design and excavation
of Large-Span Caverns at point 1. Proc. of the IRSM
regional Symposium Euorock 2001 – Rock Mechanics – a
challenge for Society – Espoo – Särkkä & Eloranda (eds).
Balkema Publishers.
Laigle, F. 2003. Modélisation rhéologique des roches adaptée
à la conception des ouvrages souterrains. Ph.D. Ecole
Centrale de Lyon, in prep.
Laigle, F. 2003. A new viscoplastic model for rocks – Application to the Mine-by-test of AECL-URL. Proc. Intern.
Symp., Sudbury, Canada. To be published.
160
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-20.qxd 08/11/2003 20:29 PM Page 161
FLAC and Numerical Modeling in Geomechanics, Brummer et al. (eds)
© 2003 Swets & Zeitlinger, Lisse, ISBN 90 5809 581 9
Recent experiences of the prediction of tunneling induced ground
movements
C. Pound & J.P. Beveridge
Mott MacDonald Ltd, Croydon, Surrey, UK
ABSTRACT: The ability to predict ground movements caused by tunneling is becoming increasingly important as more tunnels are constructed in urban areas. It is generally recognized that the ground surface settlement
trough above a tunnel is well represented by a gaussian curve. Data is available from many projects around the
world, which provides guidance on the values to use in the gaussian curve. However, if novel forms of tunneling are used, if unusual ground conditions are present or if horizontal or subsurface ground movement predictions are required, then these empirical methods are not suitable.
This paper presents the results of a suite of numerical analyses carried out to identify the most appropriate soil
model to use for the prediction of surface settlement troughs. As shown by many other authors linear elastic or
linear elastic perfectly plastic soil models are unsuited to the prediction of realistic surface settlements. Most of
the analyses carried out in the study predict a settlement trough that is wider than observed despite modifications to the size of the model, the boundary conditions, the in-situ stress conditions and the initial small strain
stiffness. The constitutive model that predicts the most realistic settlement trough was a non-linear anisotropic
soil model with a higher horizontal than vertical stiffness. The soil non-linearity was based on the approach
suggested by Jardine but modified for anisotropy. The shape of the trough was found to be sensitive to the value
of the vertical to horizontal shear modulus and the ratio of the horizontal and vertical Young’s moduli.
1 INTRODUCTION
The prediction of ground movements is very important
during the planning and design phase of any tunnel
construction project in an urban area. This prediction
is used to identify the risk of damage to adjacent
structures and utilities and to assess whether the proposed construction method needs to be modified. It
can also be used to highlight where mitigation measures may be necessary in advance or during tunnel
construction.
Surface settlements caused by tunneling are normally assessed using empirical methods (O’Reilly &
New 1982, Macklin 1999). The method was developed
from review of settlement data from a large number
of tunneling projects around the world. However, the
method is difficult to apply when the ground conditions or construction method is unusual or where more
than one tunnel is present. Many attempts have been
made to use numerical methods to predict ground
movements due to tunneling but almost without exception the analyses have predicted unrealistic surface
settlement troughs.
This paper presents the results of a numerical modeling study to identify the factors affecting the prediction of surface settlements above tunnels.
2 NUMERICAL ANALYSIS
Numerical analysis is often used to predict the loads
on tunnel linings using a variety of finite element and
finite difference programs. However, unless the ground
movements are predicted accurately it is difficult to
be confident that the predicted ground load acting on
the linings is correct. The prediction of surface settlement troughs caused by tunneling is difficult and even
the adoption of sophisticated constitutive models for
the soil rarely results in a realistic surface settlement
trough.
The following sections present a series of analyses
carried out in an attempt to match the surface settlement troughs observed above the bored tunnels on
the Heathrow Express project (Pound & Beveridge, in
press). A section of single bored tunnel was considered
where the volume loss was typically 0.8% with a
161
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-20.qxd 08/11/2003 20:29 PM Page 162
Table 1. Basic geotechnical parameters.
Parameter
Terrace gravel
London clay
Bulk Unit Weight (kN/m3)
Porosity (%)
Cohesion (kPa)
Friction (°)
20.0
35
0
38
20.0
50
37.5
0
0
0.5
Earth pressure at rest, ko
1.5
1
2
2.5
3
10
Depth below ground level (m)
6z
trough width factor of 0.5. The back analysis was
carried out using the finite difference program FLAC.
The ground conditions comprise 4.4 m of Terrace
Gravel overlying London Clay. The base of the London
Clay is at a depth of about 60 m below ground level.
The water table was taken to be 2.1 m above the base
of the Terrace Gravel and initial water pressures were
taken to be hydrostatic through the Terrace Gravel
and the London Clay. The tunnel axis was taken to be
at a depth of 22.5 m below ground level and the tunnel
diameter was taken as 6.115 m.
The basic geotechnical parameters used in the
analysis are given in Table 1. The strength properties for
the London Clay represent the fissured undrained
shear strength and the values vary with depth, z, below
ground level. The stiffness adopted for the Terrace
Gravel and London Clay is described in detail.
The variation of coefficient of earth pressure at
rest, ko, with depth is shown in Figure 1. The values
in the London Clay were derived from assessment of
the results of self-boring pressuremeter tests and pore
suction measurements made on undisturbed samples.
Only the short-term ground movements were
modeled. Throughout the analysis the response of the
Terrace Gravel was taken as drained whereas the response of the London Clay was taken to be undrained.
This was achieved by setting the bulk modulus of the
pore fluid to be zero in the Terrace Gravel and 2 GPa in
the London Clay.
The mesh for the modeling is shown in Figure 2 and
comprises over 5000 elements. Advantage was taken
of symmetry about a vertical plane through the tunnel
axis. The far boundary is located 90 m from the tunnel
centerline, which represents a distance of 4 times the
tunnel depth. The base of the model was located at the
base of the London Clay and was fixed against movement in both directions while in most analyses the vertical boundaries were fixed only in the horizontal
directions. Tunnel excavation was modeled by first
replacing the elements within the profile of the tunnel
by equivalent grid-point forces and then by progressively reducing these grid-point forces. The volume
loss was determined by integrating the vertical displacements at the ground surface. Once a volume loss
of 0.8% was achieved the segmental concrete lining
was installed and the remaining grid-point forces
removed. The segmental lining was taken to have the
20
30
40
50
Test data
Mayne and Kulhawy
60
Figure 1. K0 profile.
Figure 2. Mesh.
Table 2. Segmental lining properties.
Young’s modulus
(Gpa)
Thickness
(mm)
Moment of
inertia (m4)
20.0
225
3.1 10
4
properties given in Table 2. The moment of inertia was
reduced to allow for the number of joints in the lining
in accordance with Muir-Wood (1975).
Soils are known to have a non-linear stress–strain
behavior prior to peak with a high initial tangent
stiffness at very small strains and reducing stiffness
with strain. One set of equations often used to represent
this decay of stiffness with strain was developed by
162
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
0
09069-20.qxd 08/11/2003 20:29 PM Page 163
Jardine et al. (1986). The approximate tangential
version of these equations were presented by Potts &
Zdravkovic (1999) and are given below:
Table 3. Jardine constants.
Parameter
Terrace gravel
London clay
A
B
C
R
S
T
!
smin
smax
vmin
vmax
1104
1035
5.00E-06
275
225
2.00E-05
0.974
0.94
1.044
0.98
8.80E-06
3.50E-03
2.10E-05
2.00E-03
1260
1143
1.00E-06
618
570
1.00E-05
1.335
0.617
2.069
0.42
1.40E-05
2.00E-03
1.00E-04
2.00E-03
Distance from centre-line (m)
and p is the current mean effective stress.
Throughout the analysis the stiffness was continually updated. Up to a specified minimum strain (smin
or vmin), the stiffness varies only with p , but thereafter
the stiffness depends both on the current strain () and
the mean effective stress (p ). It is considered that these
equations lead to unrealistically low elastic moduli at
very low stresses and therefore the minimum mean
effective stress used in calculating the elastic moduli
was 50 kPa.
The constants used in the Jardine equations are
given in Table 3.
2.1
Linear elastic analyses
Initial analyses were carried out using linear elastic and
linear elastic perfectly plastic soil models (analyses t1
and t2). The elastic moduli were taken as multiples of
the mean effective stress in order to give a load in the
lining of between 35 and 40% of overburden which is
considered to be a typical short-term load on a bored
tunnel lining in London Clay. To achieve this criterion
the elastic model was taken to be 20% of the small
strain stiffness for the linear elastic model and 35% of
the small strain stiffness for the plastic analysis. Thus
for the elastoplastic analysis the shear modulus for the
London Clay was given by the following equation.
Settlement / Maximum Settlement .
where s is a generalized shear strain related to the
octahedral shear strain, oct, by the following equation:
10
20
30
40
50
0.2
0.4
0.6
0.8
t1
t2
Gauss Curve
1
1.2
Figure 3. Linear elastic/elastoplastic analyses.
This is significantly higher than is conventionally
used in tunnel analyses even in overconsolidated
materials.
Figure 3 shows the surface settlement troughs for
these two analyses and the corresponding gaussian
curve for a volume loss of 0.8% and a trough width
factor, K, of 0.5. The surface settlement troughs from
the two analyses are clearly unrepresentative of the
observed ground settlement showing a maximum
settlement around 15 m from the tunnel centerline. The
analysis with the elastoplastic model is worse because
of the ground yielding that is predicted between the
tunnel crown and the ground surface resulting from the
high in-situ horizontal stresses. These results clearly
show the limitations of using linear elastic ground
models for the prediction of ground movement
around tunnels.
2.2
Non-linear elastic analyses
Figure 4 shows the surface settlement trough when
the non-linear behavior given by the Jardine equations is adopted in the analysis (t3). The maximum
163
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
0
0
09069-20.qxd 08/11/2003 20:29 PM Page 164
Distance from centre-line (m)
0
10
20
30
40
50
Settlement / Centre-line Settlement .
Settlement / Centre-line Settlement .
Distance from centre-line (m)
0
0.2
0.4
0.6
0.8
1
t1
t3
t4
Gauss Curve
1.2
0
0
10
20
30
40
50
0.2
0.4
0.6
0.8
t3
t5
t6
t7
Gauss Curve
1
1.2
1.4
Figure 4. Non-linear elastic analyses.
Figure 5. Small strain model.
settlement is still not located on the tunnel centerline,
but is offset by about 10 m. The trough is significantly
narrower than the linear elastic case, but is still much
broader than the gaussian curve. To investigate the
influence of the high horizontal stress on the shape of
the settlement trough, an analysis was run using a k0
profile based on the approach suggested by Mayne &
Kulhawy (1982). The k0 profile assumed that 170 m
of overburden had been removed from the top of the
London Clay prior to the deposition of the Terrace
Gravel. The k0 was taken as 0.4 in the Terrace Gravel.
The shape of the k0 profile is given in Figure 1 and
shows lower k0 values particularly in the top ten
meters of the London Clay than the profile used in
analysis t3. The resulting settlement trough from
analysis t4 is shown in Figure 4. Although the low
point of the settlement trough is nearer to the tunnel
centerline and the trough is generally narrower, the
overall shape of the settlement trough is only slightly
different.
To consider the effect that fixity conditions on
the far boundary have on the shape of the settlement
trough, analyses were run with the far boundary fixed
both horizontally and vertically and also with a stress
boundary condition. Neither analysis gave an improved
shape of settlement trough.
Analyses were also carried out with wider meshes to
see if a boundary width of 4 tunnel depths was inadequate. Analyses were carried out with a mesh width of
150 m and 1000 m. The effect of an increased mesh
width was minor with a small reduction in the settlement at 50 m from the tunnel centerline, but a corresponding increase in the settlement 5 m from the tunnel
centerline.
Analyses were carried out to investigate the effect
of modifying the shape of the non-linear model and
the results are presented in Figure 5. In the first analysis (t5) the stiffness was increased by 50% at all
strains compared to the model prediction. In the next
analysis (t6) the strain limit for the plateau region
of the model was extended to a higher strain level.
In both of these analyses the increase in the soil stiffness made the shape of the settlement trough worse.
In the third analysis (t7) the small strain stiffness was
increased by 50%, but the shape of the stress–strain
curve was the same after the end of the initial plateau
region as in analysis t3. The modifications to the
small strain stiffness had only a modest influence on
the shape of the settlement trough.
2.3
A number of authors have indicated that only with an
anisotropic soil model can a realistic shaped settlement
trough be obtained (Simpson et al. 1996, Addenbrooke
et al. 1997). There is good evidence that the behavior
of London Clay is anisotropic with a higher horizontal than vertical Young’s modulus (Bishop et al.
1965). Data also exists for other overconsolidated
clays (Lings et al. 2000).
The anisotropic elastic model was modified to allow
input of non-linear elastic behavior. No anisotropic
elastoplastic soil model currently exists in FLAC,
however with a volume loss of only 0.8%, the strains
in the ground surrounding the tunnel are only sufficient for very local plastic yielding of the ground to
occur and therefore there should be only a small error
in the adoption of an elastic model. In the absence
of any definitive anisotropic constitutive soil model
for the London Clay, the basic Jardine equation was
modified as follows:
where X is defined as above. The values of the
constants in the above equations are given in Table 3.
164
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
Anisotropic soil model
09069-20.qxd 08/11/2003 20:29 PM Page 165
Distance from centre-line (m)
0
5
10
15
20
25
30
35
40
45
50
Settlement / Centre-line Settlement .
Settlement / Centre-line Settlement .
Distance from centre-line (m)
0
0.2
0.4
0.6
0.8
t8
t9
t10
Gauss Curve
1
1.2
Figure 6.
Anisotropic model.
0
0
5
10
15
20
25
30
35
40
45
50
0.2
0.4
0.6
0.8
t9
t11
t12
t13
Gauss Curve
1
1.2
Figure 7. Effect of varying shear modulus.
The small strain stiffnesses are slightly lower as they
now relate to the vertical stiffness rather than an
isotropic stiffness given previously. The adoption of
the equations given above relate the variation of the
stiffnesses only to shear strain and not to volumetric
strain. This model is therefore only suitable for modeling shear deformations and would need to be modified to consider swelling or consolidation. The two
independent Poisson’s ratios were taken as follows:
Settlement / Centre-line Settlement .
Distance from centre-line (m)
0
0
5
10
15
20
25
30
35
40
45
50
0.2
0.4
0.6
0.8
1
t9
t12
t14
t15
Gauss Curve
1.2
Figure 8. Effect of varying Poisson’s ratio.
The analysis was first run with a pseudo-isotropic
analysis with both Emul and Gmul set to 1.0. The results
of the analysis are shown in Figure 6 (analysis t8).
The shape of the curve is somewhat improved
compared to the previous isotropic analyses. Two further analyses (t9 and t10) were carried out with higher
horizontal stiffnesses by setting Emul to 1.6 and 2.0.
The settlement troughs are also given in Figure 6.
The shape of the settlement trough is significantly
improved as the horizontal to vertical stiffness ratio
is increased. The data by Bishop et al. (1965) and by
Atkinson (1975) suggested that for London Clay the
ratio of horizontal to vertical Young’s modulus is
around 1.6.
To investigate the effect of the value of the shear
modulus on the shape of the settlement trough, a set
of analyses were carried out with the value of Emul set
to 1.6 and with values of Gmul of 0.5, 0.8 and 1.6
(Analyses t11, t12, t13). The results are compared
against the analysis (t9) with a Gmul of 1.0 in Figure 7.
The shape of the settlement trough is very sensitive
to the value of the shear modulus. Generally as the
shear modulus is increased the width of the settlement
trough is also increased. The best fit to the middle
part of the settlement trough is achieved when the
shear modulus is only one third of the vertical Young’s
modulus. However, this shape of settlement trough
can also be achieved by setting the horizontal Young’s
modulus to be equal to twice the vertical Young’s
modulus.
The settlement at the edges of the settlement
trough is much greater than that suggested by the
gaussian curve and is also greater than observed in
practice. The settlement towards the boundary of the
mesh results from the horizontal ground movements
and a corresponding Poisson’s ratio effect. To reduce
the vertical strains due to horizontal displacements,
the Poisson’s ratio in the vertical plane was set to zero.
Analyses t9 and t12 were repeated with a Poisson’s
ratio of 0.0 as analyses t14 and t15 and the results are
shown in Figure 8. There is a significant narrowing of
the trough as well as a significant reduction in the farfield settlement. However, the settlement 50 m from
the tunnel centerline is still 10% of the centerline
settlement.
Due to the assumed undrained response of the
London Clay any horizontal movement will result in
an equivalent vertical settlement. To prevent this
surface settlement would require a volumetric change in
the soil and thus a drained soil response. To investigate
this effect, analysis t14 was repeated as analysis t16
with the soil more than 20 m from the tunnel centerline
165
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-20.qxd 08/11/2003 20:29 PM Page 166
Distance from centre-line (m)
Settlement / Centre-line Settlement .
0
5
10
15
20
25
30
35
40
45
50
0
0.2
0.4
0.6
0.8
1
t14
t16
t17
t18
Gauss Curve
1.2
Figure 9. Effect of varying the bulk modulus of water.
assumed to be fully drained. The predicted settlement
trough is shown in Figure 9. As can be seen, the shape
of the surface settlement trough predicted by this
analysis is very similar to the shape of a gaussian
distribution with only a very small surface settlement
50 m from the tunnel centerline. It is considered that the
shape of this predicted curve is probably as good
a match to observed tunnel settlements as a gaussian
curve.
3 DISCUSSION
The results of the series of analyses show that only with
the adoption of an anisotropic model can a realistic
settlement trough be predicted. This is similar to
results found by others (Simpson et al. 1996). Threedimensional numerical analyses, which model the
full construction sequence, have also been carried out
and these also demonstrate that an isotropic soil model
leads to wider surface settlement troughs than those
observed in practice. Adoption of an anisotropic
soil model results in surface settlement troughs very
similar to those predicted by the two-dimensional
analyses.
The anisotropic behavior of stiff overconsolidated
clays can be explained on the basis of the preferential
alignment of clay particles. There is also some data
from field and laboratory testing to indicate that
stiff overconsolidated clays are anisotropic. However
sands have an even narrower settlement trough than
those of clays as indicated by the trough width factor
normally adopted. There is less justification for the
adoption of an anisotropic soil model for sands from
field and laboratory testing data. Sands of course
will not respond in an undrained manner during
tunneling and it may be that the different pattern of
groundwater pressures around the tunnel during excavation will result in a different pattern of surface
settlements predicted by the isotropic soil model.
The stress–strain behavior of most rocks is controlled not by the elastic behavior of the intact material but by the orientation and properties of the
discontinuities. The presence of the discontinuity sets
will inevitably impose an anisotropic response to the
mass behavior of the rock which it is logical to suppose will influence the shape of the settlement trough.
It is also reasonable to assume that where ground
settlements are large, slip on discontinuities will occur.
This could explain the narrow settlement troughs
observed over many tunnels in rock. The in-situ stress
conditions could also influence this behavior.
The only way found to prevent the prediction of
significant settlements at the boundary of the model
was to assume drained behavior for the soil at a distance from the tunnel. The ratio of bulk stiffness of
the water to that of the soil controls the drained or
undrained behavior even where there is no groundwater
flow. Because of the increased strains near to the tunnel
and the formulation of the anisotropic model, the bulk
stiffness of the soil model nearer to the tunnel is lower
than that further from the tunnel. With a bulk stiffness
for the water of 2 GPa, the water is at least one order
of magnitude stiffer than even the small strain stiffness of the soil. Reducing the bulk modulus of the
water has the effect of making the response of the soil
apparently partially drained far from the tunnel and
essentially undrained near to the tunnel. The effect
was found to be modest with a bulk modulus of
0.2 GPa (analysis t17) but resulted in a realistic shaped
settlement trough with a bulk modulus of 0.02 GPa
(analysis t18). The results of these two analyses are
plotted in Figure 9. Unfortunately a bulk modulus for
the water of 0.02 GPa, is unrealistically small. It is
possible that the apparent drained response of the
ground far from the tunnel is due to a combination
of a lower bulk modulus of water, a higher bulk
stiffness of the soil than currently assumed and the
effect of some drainage of the soil due to the slow
small stress changes occurring in the soil far from the
tunnel.
4 CONCLUSIONS
The numerical analyses show that traditional linear
elastic analyses with or without a yield criterion
cannot predict settlement troughs similar to those
observed. Even non-linear elastoplastic analyses with
isotropic soil stiffnesses overpredict the width of the
surface settlement trough. Only by adopting a nonlinear anisotropic elastic soil model can surface settlement troughs similar to those observed be predicted.
To reduce the predicted settlements at the edges of the
trough it is necessary to assume partially drained
behavior of the soil. It is suggested that this could
result from a lower bulk stiffness of the water.
166
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-20.qxd 08/11/2003 20:29 PM Page 167
REFERENCES
Addenbrooke, T.I., Potts, D.M. & Puzrin, A.M. 1997. The
influence of pre-failure soil stiffness on the numerical
analysis of tunnel construction. Géotechnique 47(3):
693–712.
Atkinson, J.H. 1975. Anisotropic elastic deformations in
laboratory tests on undisturbed London Clay Géotechnique
25(2): 357–374.
Bishop, A.W., Webb, D.L. & Lewin, P.I. 1965. Undisturbed
samples of London Clay from the Ashford Common Shaft:
strength-strain relationships. Géotechnique 15(1): 1–31.
Jardine, R.J., Potts, D.M., Fourie, A.B. & Burland, J.B. 1986.
Studies of the influence of non-linear stress–strain
characteristics in soil-structure interaction. Géotechnique
36(3): 377–396.
Lings, M., Pennington, L., Nash, D.S. & Poisson, D.F.T.
2000. Anisotropic stiffness parameters and their measurements in a stiff natural clay. Géotechnique 50(2):
109–125.
Macklin, S.R. 1999. The prediction of volume loss due to
tunneling in overconsolidated clay based on heading
geometry and stability number. Ground Engineering,
32(4).
Mayne, P.W. & Kulhawy, F.H. 1982. K0-OCR relationships in soil. Proc. ASCE, Journal of the Geotechnical
Engineering Division, Vol. 108, No. GT6, 851–872.
Muir-Wood, A.M. 1975. The circular tunnel in elastic
ground. Géotechnique 25(1): 115–127.
O’Reilly, M.P. & New, B.M. 1982. Settlements above
tunnels in the United Kingdom–their magnitude and
prediction. Tunnelling ’82, The Institution of Mining and
Metalllurgy, 1982 pp. 173–181.
Potts, D.M. & Zdravkovic, L. 1999. Finite element analysis in
geotechnical engineering: theory. London Thomas: Telford.
Pound, C. & Beveridge, J.P. 2002. Recent experiences of
the measurement of ground movements around tunnels.
In press.
Simpson, B., Atkinson, J.H. & Jovicic, J.H. 1996. Geotechnical aspects of underground construction in soft ground.
pp. 591–594. Balkema.
167
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-21.qxd
8/26/03
10:41 AM
Page 169
FLAC and Numerical Modeling in Geomechanics, Brummer et al. (eds)
© 2003 Swets & Zeitlinger, Lisse, ISBN 90 5809 581 9
Numerical modeling of remedial measures in a failed tunnel
Y. Sun & P.J.N. Pells
Pells Sullivan Meynink Pty Ltd, Sydney, Australia
ABSTRACT: A FLAC3D analysis was conducted for the investigation of the failure and the design of remedial
works for one tunnel in Melbourne Australia. Failure of an approximately 8 m length of the sidewall of the formed
concrete arch occurred in mid February 2000. The original design of the un-reinforced concrete lining was such
that it just sits on the flat upper surface of the approximately 1.8 m-thick concrete invert. It was generally believed
that the failure was primarily due to the compressive stresses across the arch/invert joint being substantially low,
which means that the compressive stresses in the arch lining induced by the groundwater pressure at time of failure
must have been transferred by 3D action to the west and east of the failure. The purpose of the numerical modeling is to return the failed section to a fully functional arch/invert concept. Key factors in the remediation are
the width and sequence of removal of the panels, which were investigated in details in this paper.
1 INTRODUCTION
The remedial concept is to remove the formed arch
concrete within and immediately around the failure area
and reinstate the original design. As a precursor to the
3D analysis, 2D analyses using Phase II was carried
out in PSM office to assess the likely compressive
and tensile stresses generated above and around panel
cut-outs, and the effects of flat jack stressing. The
results were used as a guide in selecting the 1.5 m
panel width and the excavation sequence proposed in
the design.
A FLAC3D model includes a 36 m length of the tunnel and the surrounding rock, which contains interface
elements between the arch lining and rock, between
the arch lining and floor, and between arch pours A
and B. The model allows an initial 3 mm gap to exist
at the arch/invert interface within the modeled failure
area, prior to application of groundwater pressures.
2 NUMERICAL MODELING
2.1
and 2 are 4 m high, Panels 3 and 4 are 3.2 m high and
Panel 5 is 1.6 m high. The model geometry is shown
in Figures 1a, b & 2.
2.2
Interfaces
Interfaces are planes within a FLAC3D model along
which sub-grids can interact, slip and/or separation is
allowed. A total of eight interfaces shown in Figure 3
are modeled as:
– Interface 1: between arch and invert.
– Interface 2: between concrete arch/invert and rock
simulating the membrane.
– Interface 3: between arches A and B.
– Interface 4: between panel 1 and arch B.
– Interface 5: between panel tops and concrete arch A.
– Interface 6: between back of panels 1, 3 and 5 and
rock surface simulating the membrane.
– Interface 7: between back of panels 2 and 4 and
rock surface simulating the membrane.
– Interface 8: between panels and concrete arch A.
Geometry of model
The model includes a 36 m length of the tunnel in the
longitudinal direction that is divided into two equal
parts, named as arches A and B. The depth of the tunnel is 60 m below the surface. Five vertical panels
with a width of 1.5 m each from the contact between
arches A and B were designed and named as Panels 1
through 5 sequentially along the arch A side. Panels 1
2.3
The initial stresses sxx, syy and szz of 60 m of rock
load were applied to the model boundary with a gradient zero as required. A 3 mm gap from arch contact
extending 6 m along arch A side and tapering off
at 7 m was modeled to replicate the field observed
initial stress conditions.
169
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
Initial conditions
09069-21.qxd
8/26/03
10:41 AM
Page 170
Figure 1a. Model geometry showing entire model.
Figure 1b. Model geometry showing arch and invert.
2.4
Modeling sequence
The following stages were developed:
– Stage 0: Initial condition. A 3 mm gap was modeled.
The pore pressure of pre-leak value of 470 KPa
170
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
was initially applied at the interface between the
concrete arch/invert and rock surface. To do so, a
virtual interface inside the tunnel surface has to be
set up in order to store the face list for applying the
equivalent normal stress to the rock surface.
09069-21.qxd
8/26/03
10:41 AM
Page 171
Figure 2. Model geometry showing layout of panels.
Figure 3. Plot showing the interfaces.
– Stage 1: Reduce the pore pressure around the tunnel
to pre-repairing condition that is zero behind the
failure area and increases linearly to 470 KPa at 30 m
away from the failure.
– Stage 2: Remove the Panels 1, 3 and 5. The corresponding interface element at the back of the panels should be removed from the list and the same
principal applies to the corresponding rock surface
171
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-21.qxd
–
–
–
–
–
–
–
8/26/03
10:41 AM
Page 172
(virtual interface) that was in contact previously
with the back of removed panels.
Stage 3b: Cast concrete panels 1, 3 and 5 in place.
The interfaces 1, 5, 6 and 8 for panels 1, 3 and 5 are
established in the model in addition to the interface 4
for panel 1, and the bottom gap between new panels and invert is set to zero. Interface 6 has to be
added into the face list for applying the normal
stresses to the back of new panel concrete. The
gravity stresses are initialized in the new panels
and low strength properties were used for the interface 8 first (Stage 3a), and then the properties were
returned to normal values.
Stage 3d: apply flat jack load of 2 MPa at the top of
Panels 1, 3 and 5. High strength properties were
used (Stage 3c) for the arch including the new panels to get rid of the possible dynamic effect, and
returned to normal afterwards.
Stage 4: Remove Panels 2 and 4. Follow the similar
procedure as described in Stage 2.
Stage 5a: Cast concrete panels 2 and 4 in place.
Follow the similar procedure as described in
Stage 3b.
Stage 5b: apply flat jack load of 2 MPa at the top
of Panels 2 and 4. Follow the similar procedure as
described in Stage 3d.
Stage 6: Increase all flat jack loads equivalent to
pressure of 4 MPa.
Stage 7: Increase the hydrostatic load to 470 KPa.
2.5
Pore pressure
The pore pressures are modeled explicitly by applying two opposite normal pressures that are equivalent
to the pore pressures to the interface between the concrete arch/invert and rock (interfaces 2, 6 and 7) and to
the corresponding rock surface. For the pre-repairing
condition, it is assumed that the drain center is
located at the top center of the panel 3. The region
with a distance of less than 4 m from the drain center
has zero pore pressure, while the region with a distance of more than 30 m from the drain center has a
full pore pressure of 470 KPa. The region that falls in
between has a linear distribution of pore pressure.
2.6
Parameters
The concrete is assumed to have a Young’s modulus
of 32000 MPa, an unconfined compressive strength
of 50 MPa and a tensile strength of 2.5 MPa. The total
zone elements of rock and concrete are 10624 and
12104, respectively. The surrounding rock is modeled
as elastic material and the concrete arch and invert
are modeled as Mohr-Coulomb material. The shear
strength parameters adopted for the various interfaces
are summarized in Table 1.
Table 1. Interface properties.
Type
Interfaces
ID No.
Cohesion
(KPa)
Friction
(deg.)
Concrete/concrete
Concrete/membrane
Concrete/flat jack
1, 3, 4 & 8
2, 6 & 7
5
0
0
0
35
10
40
3 FISH CODING
Various FISH codes were developed to perform the
following functions as:
– Storing all zone faces connected to the concrete/rock
interfaces (2, 6 and 7) to create a list of all faces
for “app nstr” late. Generally, there are two interface elements that are associated with one zone.
We can pick up the first element and skip the second one to set up a list where the address of the
zone to which the interface element is attached,
and the corresponding face ID number are stored
in a 2-dimensional array.
– Removing faces from the list if zones are changed
to a different model (here anisotropic) prior to being
made “null”.
– Applying the equivalent pore pressure to the zone
faces in the current list.
– Shifting the solid back to the tunnel for quick
manipulation.
– Adjusting the contact between the arch and the
invert slab.
– Setting the gap between arch A and the invert slab.
– Calculating the pore pressure distribution at the
pre-repairing condition.
4 RESULTS AND DISCUSSIONS
Figure 4 shows contours of smin at the initial stage,
where the 3 mm gap between the concrete arch A
and invert slab was maintained. The majority area
immediately adjacent to the gap has a compressive
stress up to 5 MPa, while elsewhere has a notably
higher compressive stress.
Figures 5a & b show contours of major and minor
principal stresses when panels 1, 3 and 5 were
excavated. Figure 6 shows the tensile crack at the top
of panel 1 and bottom between panel 3 and 5.
Figures 7a & b show contours of major and minor
principal stresses when panels 2 and 4 were excavated
and the flat jacks above panels 1, 3 and 5 are stressed
to 2 MPa. Tensile stresses above these panels were
dropped from 1 MPa to less than 500 KPa. The maximum compressive stresses show quite a complex
distribution with a maximum less than 8 MPa. Tensile
failure (Fig. 8) remains at the top corner of panel 1
172
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-21.qxd
8/26/03
10:42 AM
Page 173
Figure 4. Contour of smin at stage 0 showing the arching effect due to 3 mm gap between arch and invert.
Figure 5a. Contour of smax at stage 2 where panels 1, 3 and 5 (from the right) were excavated.
and develops between panels 4 and 5, where a stress
concentration is noticed due to the difference in
height. It should be noted that tensile cracking in
these locations is not of a particular concern.
Figure 9 shows the cracking pattern after all
flat jacks are stressed to 4 MPa with groundwater
pressure at low values, corresponding to the process during the repair work. In general, the stresses
173
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-21.qxd
8/26/03
10:42 AM
Page 174
Figure 5b. Contour of smin at stage 2 where panels 1, 3 and 5 (from the right) were excavated.
Figure 6. Plasticity plot at stage 2.
are benign and there is no new cracking. Figure 10
shows the crack pattern when the groundwater
pressures are returned to a high value at 470 KPa.
A tensile crack is predicted on the rock side of the
arch about 2.5 m above the panels vertically. This
indicates the need to increase the flat jack pressures
progressively as the groundwater pressures are
allowed to recover.
174
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-21.qxd
8/26/03
10:42 AM
Page 175
Figure 7a. Contour of smax at stage 4 where panels 2 and 4 (from the right) were excavated.
Figure 7b. Contour of smin at stage 4 where panels 2 and 4 (from the right) were excavated.
As an alternative, one more model was run from
the end of stage 6. Instead of increasing the hydrostatic load to 470 KPa in one go, a progressive
approach was adopted this time. First adjust the
hydrostatic load around the tunnel to a lower and uniform load of 400 KPa. Then increase the hydrostatic
load to 425 KPa, 450 KPa and finally to 470 KPa
progressively. An improved cracking was noticed as
175
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-21.qxd
8/26/03
10:42 AM
Page 176
Figure 8. Plasticity plot at stage 4.
Figure 9. Plasticity plot at stage 6.
shown in Figure 11. Clearly it indicates that both
slowly and uniformly recovering of the groundwater
pressure will reduce the final cracking on the concrete arch remarkably.
5 CONCLUSIONS
The results provide confirmation that 1.5 m panel
width, and the sequence of excavation of panels
176
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-21.qxd
8/26/03
10:42 AM
Page 177
Figure 10. Plasticity plot at stage 7.
Figure 11. Plasticity plot at stage 7 for the alternative approach.
(excavate panels 1, 3 & 5 first and then panels 2 & 4)
is reasonable design assumptions. Tensile cracking is
predicted at the eastern top corner of Panel 1 adjacent
to the frictional joint between arches pours A and B. It
is recommended that the measures of progressively
increasing the flat jack pressures as well as slowly
recovering the groundwater pressure to a full uniform
value of 470 KPa are to be taken to minimize the
177
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-21.qxd
8/26/03
10:42 AM
Page 178
tensile cracks in the concrete arch region above the
repaired section.
It also demonstrates that the FLAC3D is a useful
tool and can be well applied to solve the complicated
engineering problem.
ACKNOWLEDGEMENT
The authors would like to thank Dr. Mike Coulthard
from M.A. Coulthard & Associates Pty Ltd for his
assistance in developing FISH coding. The authors also
benefited from many discussions with him as well.
REFERENCES
Itasca Consulting Group, Inc. 1997. FLAC3D – Fast
Lagrangian Analysis of Continua in 3 Dimensions,
Version 2.0 User’s Manual. Minneapolis: Itasca.
Internal Report, PSM500.R3, April 2001. Design report for
structural and water inflow remediation at CH 11945m,
Appendix C, Three-dimensional analysis.
178
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-22.qxd
8/18/03
1:06 PM
Page 179
Mining applications
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-22.qxd
8/18/03
1:06 PM
Page 181
FLAC and Numerical Modeling in Geomechanics, Brummer et al. (eds)
© 2003 Swets & Zeitlinger, Lisse, ISBN 90 5809 581 9
Sill pillar design at the Niobec mine using FLAC3D
P. Frenette & R. Corthésy
Département des Génies Civil, Géologique et des Mines, École Polytechnique, Montréal, Canada
ABSTRACT: The paper presents the numerical analyses performed with FLAC3D to study the stability of the
rock mass surrounding the stopes at the Niobec mine in Chicoutimi, Québec. Since the mine expansion is done
at depth, the stability of the planned stopes had to be evaluated in order to determine the support requirements
linked to an increase of the in situ stresses. The paper focuses on the dimensioning of the sill pillar between
mining blocks 3 and 4 using FLAC3D. A rock mass characterization of the site has been made prior to the numerical modeling. The characterization consisted of structural geological mapping, laboratory testing of rock samples and in situ stress measurement. All the stopes were then modeled and the parameters obtained from the site
characterization were used in the FLAC3D model. Various alternatives have been analyzed, including the use of
backfill and variations of pillar thicknesses for the third pillar.
1 INTRODUCTION
Safe and economical dimensioning of underground
excavations is often hard to achieve because of the
numerous parameters involved. These parameters
include rock mass characteristics, orientation and magnitude of stresses, excavation method and sequencing.
Any combination of these factors may change from
one point to another, requiring a reevaluation of the
mine design. This is the case at the Niobec mine,
located near Chicoutimi, Québec, were underground
production is soon reaching the fourth mining block.
The increase in stresses with depth requires calculating the dimension of the sill pillar between the third
and fourth mining blocks. At the present time, Niobec
mine has 3 horizontal pillars. The crown pillar with
a thickness of 90 m (300 feet), the pillar between
mining blocks 1 and 2 with a 30 m (100 feet) thickness and the pillar between mining blocks 2 and 3
being 45 m (150 feet) thick. These pillars are necessary for the stability of the excavations and absorb
part of the stresses caused by the mining of the stopes
which remain open after being mine out.
As for any rock mechanics design, there is no direct
method for dimensioning horizontal pillars in hard
rock mines as each mine has its own geometric and
geomechanical settings, which make it difficult to
have a universal recipe that allows an optimal pillar
design. Consequently, numerical modeling was considered the best tool for the project.
Although the overall quality of the rock mass at the
Niobec mine is good, the increasing stress levels with
depth, as confirmed by in situ stress measurements,
will increase the potential for failure which has to be
investigated. Moreover, the stope geometry being relatively massive, a two-dimensional model was not considered realistic for the Niobec mine. Although the
authors did not find applications of FLAC3D for the
modeling of a complete mine in the literature, they
found it would be interesting to use the software for
that purpose, since it could efficiently model rock mass
failure and, if required, the use of backfill in the open
stopes.
In order to gather the data for the numerical model,
a rock mass characterization program including
structural geological mapping, laboratory testing and
in situ stress measurements was conducted. The work
was facilitated by the fact that the rock mass including the ore bearing zones and host rock are relatively
homogeneous and can be considered as a single zone.
2 SITE INVESTIGATION
2.1
Niobec mine is located near Chicoutimi in Québec
and has been producing niobium since 1976. It is
owned in equal part by Cambior and Mazarin. The
mine produces 3500 tons of ore each day by long hole
stoping. Each stope is 45 m deep, 25 m wide and 90 m
high. Mining is done using primary and secondary
stopes, creating openings up to 200 m wide. The mine
has 3 mining blocks and 8 levels, the lowest production
181
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
Niobec mine
09069-22.qxd
8/18/03
1:06 PM
Page 182
Table 1. Principal stresses tensor.
1
2
3
Table 3. Mohr–Coulomb parameters for the
rock substance.
Stress
Strike
Plunge
29.5 MPa
16.0 MPa
9.1 MPa
45°
138°
310°
04°
38°
51°
Parameter
Unconfined compressive strength
Tensile strength
Young’s modulus
Poisson’s ratio
124 MPa
8.1 MPa
55 GPa
0.254
Table 2. Stress gradients.
850
Level (Mpa/m)
(hole #1) (hole #2) 1000
1450
Mean horizontal
stress gradient
Vertical stress
gradient
0.0642
0.0454
0.0466
0.0484
0.0386
0.0194
0.0274
0.0267
along 1370 m of drift using the scanline method. Major
joints of over 1m were plotted for both level 1150 and
1450. The results were compared with two other studies made on the previous levels and the comparison
showed the persistence of two major families of joints
on all levels with the appearance of a third family with
increasing depth.
2.4
level being 1450 feet deep. A fourth mining block is
scheduled to open in 2011.
2.2
In situ stress measurements
Stresses were measured at the 1450 level (Corthésy
2000) using the modified doorstopper method (Leite
et al. 1996). Unlike the conventional doorstopper
method, the modified method allows continuous
reading of the strains at the bottom of the hole including temperature readings. These continuous readings
allow evaluating the quality of each measurement.
These are performed in three differently oriented holes
in order to obtain the three-dimensional stress tensor.
Table 1 shows the principal stress tensor obtained by
combining the data obtained from the three holes
using the least squares approach. The stress calculation
procedure allows considering both local anisotropy
and heterogeneity.
Those results were compared with another in situ
stress measurement campaign made by Canmet
(Arjang 1986) using the CSIR triaxial cell (Leeman
1967). In this earlier campaign, stress tensors were
calculated on levels 850 and 1000. Two holes were used
on level 850 and one on level 1000. Principal stress
gradients on levels 1450 and 1000 are similar, but
results from the 850 level are not, probably because
the measurements were made in the influence zone of
a stope. Table 2 shows the stress gradients for level
850, 1000 and 1450.
2.3
Structural geological mapping
Structural geological mapping was conducted on
levels 1150 and 1450. Over 8000 joints were identified
2.5
Laboratory testing
Laboratory tests were conducted on rock samples.
Seventeen samples were tested to obtain the unconfined
compressive strength of the rock while seventeen other
samples were tested to determine the tensile strength
of the rock. Three triaxial compression tests were also
conducted to verify the adjustment of the data to empirical strength criterion. The deformability parameters
were obtained indirectly from the stress measurement campaign as they were required to interpret the
results following a procedure suggested by Corthésy
et al. (1993). Table 3 shows the mechanical parameters
obtained for the rock substance.
3 NUMERICAL MODELING
3.1
Model geometry
Autocad files representing all the stopes mined
before 2000 were used as a database to build the
geometry of the model. Unfortunately, no interface
allowing the importation of dxf files is available
with FLAC3D, so the dxf file containing all the stopes
coordinates was used to build the model (see Fig. 1).
The three existing mining blocks were divided into
separate entities that were later merged. Each block
182
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
Rock mass classification
Once all the required parameters were obtained, the
rock mass was classified according to the RMR and
Q indexes. The RMR value was found to be 77 and the
Q index was estimated at 40, which corresponds to a
good rock mass in both cases. These results were also
used to obtain the failure envelope of the rock mass
for the Mohr–Coulomb criterion.
09069-22.qxd
8/18/03
1:06 PM
Page 183
Figure 1. Isometric view of the three mining blocks.
Figure 3. Perspective view showing the modelling of the
walls surrounding a stope.
Figure 2. View of part of the first mining block showing the
20 m 20 m grid and the simplifications made to the stopes.
was subdivided into smaller sections to model the
excavations using a 20 m 20 m 20 m mesh at
the outer edge of the sections (Fig. 2). These sections
were made from 7 different parts, the 4 walls along
with the floor, the roof and the stope itself. This
method allowed modeling all the excavations, but
some simplifications were necessary in order to keep
the number of zones and time spent to building the
model geometry to reasonable values (Fig. 3). All the
stopes were modeled this way and adjacent sections
were merged to obtain a uniform mesh. A transition
zone had to be inserted between each mining block to
merge them together without creating a discontinuity
in the model.
3.2
Boundary conditions
Some problems were encountered for applying the
stresses on the model. Since means of applying shear
stress gradients on the boundary of the model were
not found, the principal stresses with their orientations as shown in Table 1 could not be applied to
Figure 4. View showing the zone added to the model so the
stresses can be applied at 45°.
the model. The solution was to make a simplifying
assumption stating that the principal stresses 1 and
2 were horizontal with an azimuth of 45° and 135°
respectively and that 3 was vertical (Fig. 4). The center part of Figure 4 (the small square) is the area
containing the stopes while the rest of the model
allows the boundaries to have the required orientation
for applying the principal stress gradients and also
insure these boundaries are not in the zone of influence
of the excavations. This buffer zone was considered to
have an elastic behavior since no failure around the
excavations should extend that far and this would also
183
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-22.qxd
8/18/03
1:06 PM
Page 184
speed up the run time of the analyses. In order to evaluate the influence of the principal stress tensor reorientation, two analyses were done using the Examine 3D
boundary element program developed by Rocscience.
This software allows us to apply the in situ major
principal stresses with any orientation relative to the
model. In one analysis, the measured in situ stress
tensor (Table 1) was input and in the other, the modified stress tensor with 1 and 2 in the horizontal
plane was used. As expected, the second model gave
lower strength factor values, which confirms the simplifying assumption related to the reorientation of the
stresses puts the model on the safe side. The strength
factor given by Examine 3D compares the stress state
at every point of the model with the strength envelope. A strength factor of 1.0 means the stress state is
on the strength envelope while a lower value means
the stress state exceeds the strength of the rock mass.
These strength factors must be considered with care
since they tend to underestimate the extension of
potentially failed zones, since the elastic analysis the
software performs does not consider the post failure
stress redistribution.
4
FLAC3D SIMULATIONS
Before running the analyses used to estimate what sill
pillar size would be optimal, various scenarios were
studied in order to perform the numerical analyses
more efficiently and to verify if the use of certain
support elements such as backfill would have an
effect on the local and overall stability of the mine. It
should also be stated that a validation of the model by
comparing its results with in situ observations was
difficult for various reasons. First, no in situ monitoring
of displacements was available. Secondly, as the rare
instabilities around the excavations in the mine are
mostly controlled by the presence of discontinuities
which are not considered in FLAC3D, it is difficult to
perform a direct comparison between the extent of
instabilities in the numerical model and the ones
observed in the field. This only emphasizes the fact
that in the absence of field monitoring and in the
presence of a good quality rock mass, validation of
numerical models is difficult.
4.1
3.3
Constitutive laws and material properties
In the analyses shown in this paper, the rock mass was
assumed to present an elastic perfectly plastic behavior, so no post peak strength values are given. Table 4
shows the strength and deformability parameters of
the rock mass used in the model. These parameters
were obtained by combining the laboratory test results
with the rock mass classification parameters presented
in section 2.4.
The authors are aware that for fragile hard rock
such as the one found at the Niobec Mine, perfect
plasticity is a not realistic assumption, but using a
strain softening constitutive law would have slowed
down the runtime of the analyses which already took
over 5 days to run on a 1.0 GHz Pentium PC. Nonetheless, now that the model is built, it would be a simple
matter to implement the strain softening parameters
and perform a sensitivity analysis by varying the postpeak strength parameters. The authors are also aware
that perfect plasticity will underestimate the extension of eventual failure zones.
Table 4. Material parameters used in the
model to simulate the rock mass behavior.
Uniaxial compressive strength
Tensile strength
Cohesion
Friction angle
Young’s modulus
Poisson’s ratio
34.4 MPa
2.1 MPa
10.5 MPa
38.5°
47.3 GPa
0.254
Table 5. Comparison of the number of failed zones on
different sections of the model for the analyses with and
without sequential mining.
Section
Mining all at
once (failed
elements)
Sequential
mining (failed
elements)
Difference
4410
4465
4530
4575
4625
4675
4730
4795
4830
4900
36
74
65
70
58
45
41
87
37
14
37
80
64
81
71
35
37
92
43
15
1
6
–1
11
13
–10
–4
5
6
1
184
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
Mining sequence
The influence of the mining sequence (excavating
the stopes in the same sequence they were mined out
in blocks 1 and 2) on the results of the analyses was
studied. This was an important point to verify since the
mining sequence for the new mining blocks (3 and 4)
was unknown and excavating the stopes all at once in
the numerical model was an interesting alternative as
it would allow important time savings. Consequently,
two analyses were run, one by excavating the stopes
one after the other and waiting for the unbalanced
forces to stabilize in between and the other by nulling
the elements in the stopes all at once. The comparison
between the two runs is done by taking the number of
failed elements in each simulation as shown in Table 5.
09069-22.qxd
8/18/03
1:06 PM
Page 185
Most of the failed elements are located around the
stopes and their dimensions are small compared to
the 20 m 20 m 20 m mesh used in areas remote
from the excavations. The section heading refers to various sections in the model that cut through the stopes in
the model. It is considered that the excavation sequence
has a negligible influence and that no clear pattern is
observed. Consequently, it was concluded that for the
following simulations, the stopes could be excavated all
at once without much effect on the outcome of the runs.
4.2
Influence of backfill
As the mine had never used backfill, it was decided to
see if the use of such support would allow minimizing
the occurrence of local failure around certain stopes.
To estimate the influence of backfill on the stability of
the openings, the same methodology as used to evaluate the influence of the mining sequence was adopted.
In these simulations, after a stope was mined out and
the unbalanced forces had stabilized, the null elements
were replaced by zones having properties matching
a backfill with 8% cement. The next stope was then
excavated and the sequence was repeated for all the
openings. The number of failed zones with and without
backfill are presented in Table 6. These simulations
showed the fill to have no significant influence on the
stability of the mine. It is believed that the very low
stiffness of the backfill compared to that of a good quality rock mass makes it almost impossible for it to absorb
any significant stresses, so it would not serve the purpose of reducing the size of the third horizontal pillar.
4.3
The main objective of this project was to find the
optimal thickness of the third horizontal pillar. The
first pillar between mining blocks 1 and 2 is 30 m
thick, the second between mining blocks 2 and 3 is
45 m thick and the third one between mining blocks 3
and 4 was also planned to be 45 m thick. Since the use
of backfill was found of little use, only three simulations were made. One optimistic analysis with a 30 m
thick pillar, another with a 45 m thick pillar identical
Table 6. Comparison of the number of failed zones on different sections for the simulations with and without backfill.
Section
Without
backfilling
With
backfilling
Difference
4410
4465
4530
4575
4625
4675
4730
4795
4830
4900
37
80
64
81
71
35
37
92
43
15
37
77
61
79
67
33
34
88
43
15
0
3
3
2
4
2
3
4
0
0
Figure 5. Failure zones for the 30 m (100) pillar for section 4795.
185
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
Design of the third horizontal pillar
09069-22.qxd
8/18/03
1:06 PM
Page 186
Figure 6. Failure zones for the 45 m (150) pillar for section 4795.
Figure 7. Failure zones for the 60 m (200) pillar for section 4795.
186
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-22.qxd
8/18/03
1:06 PM
Page 187
to the one between blocks 2 and 3 and finally a last
simulation with a 60 m pillar.
As the stope layouts for the third and fourth mining
blocks were not available at the time the simulations
were run, the geometry of these blocks was assumed
to be similar to that of blocks 1 and 2.
The simulation with a 30 m pillar showed that the
pillar would be stable, but that only a 20 m thickness
would remain intact (Fig. 5). The two other simulations showed that a 40 m thick zone would remain
intact with the 45 m pillar (Fig. 6) and 53 m would be
free from failed zones for the 60 m pillar (Fig. 7).
The number of failed zones in the pillars were then
compared. The direct comparison can be done since
the number of zones remained constant between simulations and only the zone thicknesses were changed
to modify the pillar thickness. The analyses showed
the 30 m pillar to have 657 failed zones on a total of
4425 zones in the pillar, while the 45 m pillar had 603
failed zones and the 60 m pillar showed 583 failed
zones. Although the 30 m sill pillar showed an overall
stability, the intact thickness is considered too small
as the presence of planes of weakness not considered
in the analyses may cause important instabilities.
Bearing this in mind, the 45 m pillar would leave an
intact rock section considered more adequate. The
results show the 60 m thick pillar would not increase
the overall safety factor significantly and the side
effects of having a pillar which is too thick, is the ore
loss and also the fact that a thicker pillar will expose
the stopes in the fourth mining block to higher in situ
stresses (due to their increased depth) causing
unwanted dilution.
5 DISCUSSION AND CONCLUSIONS
The proposed pillar design presented in this paper
should, prior to accepting it, be analyzed using a more
realistic constitutive law than perfect plasticity for hard
rock. The strain-softening model available in FLAC3D
should be tested with various post-peak strength
parameters in order to perform a sensitivity analysis of
the excavation response to these parameters.
Also, if one wishes to fine-tune the model, an optimization of the element size around the excavations
could be made.
In conclusion, the work presented in this paper
showed that modeling a complete mine with FLAC3D is
quite an undertaking since there are no simple ways to
create the geometry, although there is now an interface
with AnsysCivilFEM which should facilitate this
task (it was not available at the time the project started).
There are also difficulties in the application of the
boundary conditions as mentioned in section 3.2 since
the authors we unable to apply shear stress gradients
to the model boundaries. Besides these difficulties,
once the model is built, it is interesting to be able to
perform sophisticated sensitivity analyses by modifying the parameters of various constitutive laws.
ACKNOWLEDGEMENTS
The authors wish to acknowledge Martin Lancet and
the personnel of the Niobec Mine who have contributed
to the success of this M.A.Sc project. They also want to
acknowledge the National Research Council of Canada
for its financial support (grant # OGP0089752).
REFERENCES
Arjang, J. 1986. In situ stress measurement at Niobec Mine,
Canmet Laboratory Report.
Corthésy, R. 2000. Mesure des contraintes in situ, mine
Niobec. CDT report, Ecole Polytechnique.
Corthésy, R., Gill, D.E., Leite, M.H. 1993. An integrated
approach to rock stress measurement in anisotropic non
linear elastic rock, Int. J. Rock Mech. Min. Sci., Vol. 30,
no. 3, pp. 395–411.
Leeman, E.R., 1967. The doorstopper and triaxial rock stress
measuring instruments developed by the CSIR, J. of the
South Afr. Inst. of Mining and Metall., Vol. 69, no. 7,
1967, pp. 305–339.
Leite, M.H., Corthésy, R., Gill, D.E., St-Onge, M., Nguyen, D.
1996. The IAM – A down-the-hole data logger conditioner for the modified doorstopper technique. 2nd North
American Rock Mechanics Symposium, Montréal,
pp. 897–904.
187
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-23.qxd 08/11/2003 20:31 PM Page 189
FLAC and Numerical Modeling in Geomechanics, Brummer et al. (eds)
© 2003 Swets & Zeitlinger, Lisse, ISBN 90 5809 581 9
Stability analyses of undermined sill mats for base metal mining
R.K. Brummer, P.P. Andrieux & C.P. O’Connor
Itasca Consulting Canada Inc., Sudbury, Ontario, Canada
ABSTRACT: Mines are often faced with sill extraction situations, and one technique that can be used to extract
a sill is to leave a consolidated fill mat in the sill cut. Several Canadian mines employ this sill extraction technique,
and in this paper the stability of these sills was modeled using two-dimensional FLAC numerical simulations. The
objective of this parametric study was to derive relationships between the required strength of the sill mats and
the maximum stable unsupported undercut span for various orebody dips. The footwall-to-hangingwall spans
described in this paper were 1.2 m (4 ft), 2.4 m (8 ft), 3.6 m (12 ft), 4.8 m (16 ft), 6.0 m (20 ft) and 10.5 m (35 ft), with
mining dips of 60°, 70° and 80°. The range of fill cohesive strength used was from 100 to 500 kPa, a typical range
for most hydraulic or paste fills. Stability charts were derived (one per ore body dip), that can be used to select
the minimum fill strengths required (in terms of cohesion) to maintain stability for different combinations of
spans and dips.
1 INTRODUCTION
FLAC simulations were set up to examine the behavior
of a typical backfill sill mat for sill extraction. The
objective of this parametric study was to derive a relationship between the strength of the sill mat and its
maximum stable unsupported span, for various different orebody dips.
The footwall-to-hanging wall spans described here
were 1.2 m (4 ft), 2.4 m (8 ft), 3.6 m (12 ft), 4.8 m (16 ft),
6.0 m (20 ft) and 10.5 m (35 ft).
2
2.1
range 5% to 12% for most fills in common use. A typical FLAC geometry is shown schematically in Figure 1.
The thickness of the sill mat was assumed to be
3.3 m (10 ft), which is a typical thickness for a sill mat.
A surcharge loading of up to 33.3 m (100 ft) above the
mat was used.
In order to reproduce this geometry, a 60 by 120 element grid was generated and the appropriate coordinates applied to its four corner nodes. As a result, each
element, or individual zone, was 0.3 m by 0.3 m (1 ft by
1 ft) in size, which is sufficiently detailed for the problem considered. Interfaces were defined between the
FLAC MODEL
FLAC model geometry
The stability of the fill mats was investigated by carrying out several FLAC analyses, using orebody widths
of 1.2 m (4 ft), 2.4 m (8 ft), 3.6 m (12 ft), 4.8 m (16 ft),
6.0 m (20 ft) and 10.5 m (35 ft). The dips considered
were 60°, 70°and 80° to give a realistic range of dips. It
was assumed that 45° is too flat to allow for a stable
unsupported backfill sill mat to be built because of slip
on the hangingwall.
For each combination of dip and span, the objective
was to determine the cohesive strength required from
the fill to ensure the stability of the sill mat, without
additional support, when fully undercut.
The range of cohesion values used was 100 to
500 kPa, which corresponds to cement contents in the
Figure 1. Typical FLAC layout for stability analyses.
(Schematic cross-section. Not to scale.)
189
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-23.qxd 08/11/2003 20:31 PM Page 190
fill and each wall, in order to allow movement of the
backfill along this surface.
Table 1. Mechanical properties used for the host rock and
the ore.
2.2
Elastic
modulus
(GPa)
Poisson’s
ratio
( )
Shear
modulus
(GPa)
Bulk
modulus
(GPa)
Density
(kg/m3)
40
0.25
16.0
26.7
2700
FLAC model run sequence
The sequence of each FLAC run was as follows:
1. Define the grid to reproduce the required stope
span and dip. At this point, consider the ore under
the mat to still be in place (i.e. consider the sill mat
to rest on solid rock).
2. Set up eight history points in the center of the
backfill column, at 0.7 m (2 ft), 1.3 m (4 ft), 2.3 m
(7 ft), 3.3 m (10 ft), 5.0 m (15 ft), 6.7 m (20 ft),
10.0 m (30 ft) and 13.3 m (40 ft) behind the back
of the next cut.
3. Define materials properties with real elastic properties, but very high strengths for the fill, and zero
friction and cohesion along the interfaces between
the backfill and the two rock walls.
4. Cycle the model to equilibrium. This first part of
the run is required to allow the fill to settle under its
own weight, as would happen in real life. The artificially high strength of the fill ensures its elastic
behavior, while the null friction at the interfaces
prevents the development of artificial stresses
during this gravity-driven compaction process.
5. Once at equilibrium, reset the fill material and
wall contacts to realistic strength properties
(these are discussed later).
6. Reset all the displacements tracked by the history
points, in order to reflect only the changes subsequent to equilibrium.
7. Remove the restraint below the fill mat by “mining” the stope so that the fill mat takes load from
its own weight and the waste fill column above.
8. Apply some convergence to the stope walls as a
result of mining. Because the act of mining will
involve some wall convergence a 10 mm incremental convergence was assumed to take place.
Due to the explicit time-marching scheme used in
FLAC, this movement had to be indirectly applied
to the walls by applying a horizontal velocity to
the model boundaries. To obtain the desired
10 mm closure, a horizontal velocity of 0.001 mm
per time step was applied inwards on both the left
and right model boundaries for 5,000 steps.
9. Remove the horizontal velocity applied on the
model boundaries (as the desired closure has been
reached), and cycle the model to equilibrium.
10. Check the history points and displacement results
to see if the configuration is stable.
2.3 Constitutive models and material properties
The constitutive model used for the host rock was
elastic, while a strain-softening behavior was retained
for the backfill.
Elastic–plastic strain softening constitutive laws
allow specifying a transition zone between the peak
and residual mechanical properties of a material. In the
cases where these mechanical properties decrease as
the material yields (which is the case with typical backfills), a strain softening behavior was used to describe
how the material’s strength is progressively decreased
from its peak value to its residual one as irreversible/
plastic strain accumulates in it.
2.4
The properties retained for the rock mass (both the host
rock and the ore) are shown in Table 1. The exact elastic and strength properties of a typical host rock are not
important, because the behavior of a sill mat is not very
sensitive to these properties, as long as they are orders
of magnitude larger than those of the backfill.
2.5
Fill properties
The fill properties used in the FLAC analyses were
based on a large in-house database of fill properties.
The main variable for the fill is its cohesive strength,
which, as mentioned, was varied between 100 and
500 kPa. As the cohesive strength was changed, so were
the elastic properties (even though not critical, this
refinement was useful as a certain degree of convergence between the footwall and hanging wall was considered, which, in turn, induced stresses in the sill mat).
In other words, as the cohesive strength of the fill was
increased, so was its stiffness. The overall fill property
setting process was carried out in the following
methodology:
1. set the cohesive strength, for example 200 kPa;
2. set the tensile strength at half the cohesion –
100 kPa for our example;
3. multiply the cohesive strength by 4 (assuming a
friction angle in the range 30° to 33°) to obtain the
corresponding unconfined compressive strength –
800 kPa for the example considered;
4. derive the corresponding cement content using
Figure 2 (to obtain an 800 kPa UCS, the required
cement content would be around 6.4%);
5. derive the corresponding elastic modulus using
Figure 3 (for a 6.4% cement content, the elastic
modulus would be near 0.53 GPa);
190
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
Host rock
09069-23.qxd 08/11/2003 20:31 PM Page 191
Table 2. Strength and elastic properties used for the backfill sill mat.
1,800
1,600
UCS (kPa)
1,400
1,200
1,000
Cement
Cohesion UCS1 content
(kPa)
(kPa) (%)
Elastic Shear
Bulk
modulus modulus2 modulus2
(GPa)
(MPa)
(MPa)
100
150
200
300
400
500
0.24
0.40
0.53
0.84
0.90*
0.90*
800
600
400
200
0
0.0
2.0
4.0
6.0
8.0
10.0
12.0
400
600
800
1200
1600
2000
4.2
5.5
6.4
8.3
10.0
11.2
92
154
204
323
346
346
200
333
442
700
750
750
Cement Content (%)
1
Figure 2. Typical relationship between UCS and cement
content for backfill.
PASTE FILL PROJECT
Paste Fill Moduli vs. Cement Content
1.00
Elastic Modulus (GPa)
0.90
0.80
0.70
Confinement
during test
(kPa)
0.60
0.50
800
400
Average
0.40
0.30
0.20
0.10
0.00
0.0
Assuming a 30° internal angle of friction.
Assuming a Poisson’s ratio of 0.30.
* Value outside of data range – elastic modulus fixed at
0.90 GPa.
2
1.0
2.0
3.0
4.0
5.0
Cement Content (%)
6.0
7.0
8.0
Figure 3. Typical stiffness properties for backfill (based on
triaxial lab tests carried out on a typical paste fill).
6. calculate the corresponding shear modulus G and
bulk modulus K, assuming a Poisson’s ratio of
0.30 (for our example G would be 206 MPa while
K would be 442 MPa); and,
7. use these values as input to the FLAC model. For
the example, these inputs would be: cohesion 200 kPa, tensile strength 100 kPa, G 206 MPa,
K 442 MPa.
The nominal friction angle was chosen at 30° (friction
angle values will be discussed in more detail later).
Table 2 summarizes the properties used for the various
fill strengths considered. The density of the backfill was
assumed to be 2.0 t/m3.
The mechanical properties of the surcharge fill
placed on top of the sill mats were lowered by 10% to
account for the lower quality of fill typically placed
on top of sill mats. The properties affected were the
cohesion, tensile strength, shear modulus and bulk
modulus – the friction angle was kept the same.
As mentioned, the constitutive model used for the
consolidated fill material was a strain-softening one. In
order to simulate this behavior, the decrease in strength
as a function of the plastic strain accumulated in the
yielding material needs to be explicitly described. For
the purpose of this study, it was assumed that the cohesion and, hence, tensile strength, would decrease linearly from their maximum value at zero plastic strain,
down to zero at a cumulative plastic strain of 1.5%.
The internal angle of friction was set to also vary linearly, but from its maximum value of 33° at zero plastic strain, down to 30° at a cumulative plastic strain of
1.5% and beyond. Neither the shear nor the bulk
moduli are affected by plastic strain and were thus left
unchanged.
The older waste fill above the sill mat was subjected
to the same plastic strain-dependent weakening process.
Cohesion and tensile strength were also decreased linearly from their maximum value (set, as mentioned previously, at 90% of those of the sill mat) at zero plastic
strain, down to zero, also at a cumulative plastic strain
of 1.5%. Similarly to the sill mat, the internal angle of
friction of the weaker fill material was set to decrease
linearly from its maximum value of 33° at zero plastic
strain, down to 30° at a cumulative plastic strain of
1.5% and beyond.
2.6
191
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
Interface between rock and fill
As previously discussed, interfaces between the host
rock and the fill, along both the footwall and hanging
wall, had to be specified due to the continuum nature
of the finite difference approach used in FLAC. During
the initial compaction stage of each run, both the internal angle of friction and the cohesive strength of these
interfaces were set to zero in order to prevent artificial stresses from developing along them as the backfill settled. During the later stages of the runs these
values were reset – the internal angle of friction was
set equal to the internal angle of friction of the sill
mat, and the cohesion was set equal to the cohesion of
the sill mat.
09069-23.qxd 08/11/2003 20:31 PM Page 192
3 INTERPRETATION OF ANALYSES
Several characteristics of the FLAC analyses were used
to determine whether the various sill mats were stable
or had failed.
Figures 4 & 5 show the unbalanced force history for
a stable layout and an unstable layout, respectively. The
unbalanced force is a key element of the time-marching
algorithm used in FLAC as it indicates the degree of
static equilibrium reached within the model at any given
cycle (as the unbalanced force diminishes, the degree of
equilibrium increases). As can be seen, the unbalanced
forces converge to zero for stable configurations, but
continue to oscillate, or even increase, for unstable ones.
Figures 6 & 7 show examples of the vertical displacement history for the control points located
within the waste fill or backfill column, as described
earlier. As can be seen, stable spans displace vertically
by only a finite amount, whereas unstable spans
continue to deform vertically as they fail.
More crudely, the deformation of the FLAC grid
can be examined, as can be seen in Figure 8. Unstable
JOB TITLE : Undermined Sill Mat Stability Analyses
FLAC (Version 3.30)
JOB TITLE : Undermined Sill Mat Stability Analyses
FLAC (Version 3.30)
+05
(10
LEGEND
step 9000
HISTORY PLOT
Y-axis :
Max. unbal. force
X-axis :
Number of steps
)
LEGEND
(10+05 )
step
9000
HISTORY PLOT
Y-axis :
Max. unbal. force
X-axis :
Number of steps
5.000
4.000
5.000
4.000
3.000
3.000
2.000
2.000
1.000
1.000
1
1
Itasca Consulting Canada Inc.
2
3
4
5
6
7
8
2
3
4
5
6
7
8
9
(10
9
+03
)
Itasca Consulting Canada Inc.
(10
+03
)
Figure 4. Example of a FLAC unbalanced force history plot
for a stable sill mat configuration. Note that the maximum
unbalanced force stabilizes at zero, since the fill panel is stable.
Figure 5. Example of a FLAC unbalanced force history
plot for an unstable configuration. Note that the maximum
unbalanced force is not zero and increases without bound as
the fill panel fails.
Figure 6. Example of a FLAC “y-displacement” (vertical) history plot at the various control points located within the backfill column, for a stable configuration. Note that the maximum displacement is finite at about 45 mm.
192
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-23.qxd 08/11/2003 20:31 PM Page 193
Figure 7. Example of a FLAC “y-displacement” (vertical) history plot at the various control points located within the backfill column, for an unstable configuration. Note that the maximum displacement increases without bound (up to 1.4 m at the
end of 12,000 cycles in this case).
Figure 8. Example of a FLAC grid plot showing failure of the sill mat at mid span, and especially at the hanging wall
contact. Note that the fill displaces downward by up to 500 mm, indicating failure.
configurations exhibit severe deformation of the
grids. Stable spans also will deform to some extent
due to settlement, as can be seen in Figure 9, but will
stabilize and not continue to deform as the runs are
further cycled.
4 SUMMARY OF RESULTS
Figures 10 & 11 show the FLAC results obtained for a
60° dip and a 1.2 m (4 ft) mining width, with a 200 kPa
cohesion backfill sill mat.
193
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-23.qxd 08/11/2003 20:31 PM Page 194
Figure 9. FLAC results for a 70° dip, a 400 kPa cohesion sill mat and a 6.7 m (20 ft) span. Most of the movement occurs in
the lower part of the sill mat, and the whole arrangement remains stable.
600
500
Average Cohesion (kPa)
Average Cohesion (kPa)
600
Stable
400
300
200
100
Failed
0
0
5
10
15
Stable
400
300
200
100
0
Stope Span (m)
Stable 60
500
Failed
0
5
10
15
Stope Span (m)
Failed 60
Stable 80
Failed 80
Figure 10. Stability Chart for 60° dipping ore showing
failed cases and stope spans. Also shown is a crude contour
separating the failed cases from the stable cases.
Figure 11. Stability Chart for 80° dipping ore showing
failed cases and stope spans. Also shown is a crude contour
separating the failed cases from the stable cases.
Back support in the form of mat reinforcing (e.g.,
screen placed on the floor of the stope to fill, together
with vertical bolts) will stabilize the local back when
the sill stopes are extracted and the fill mat is undermined. The aim of this study is limited to the overall stability of the backfill sill mats, and excludes minor falls
of fill from the back that must be expected to occur
unless appropriate mat reinforcing techniques are used.
It is understood that the support of the immediate back
will be ensured by mines through the appropriate use of
this type of reinforcing.
These charts can be used to select fill strengths (in
terms of cohesion) for different combinations of spans
and dips. Since fill strength is normally measured in
terms of uniaxial compressive strength, this can be
estimated by multiplying the cohesion by a factor of
4, i.e. for a cohesion of 200 kPa, a uniaxial compressive strength of 800 kPa will be necessary. Note that
the FLAC analyses as presented do not incorporate
any Factors of Safety – appropriate Factors of Safety
must therefore be applied to the fill strength for design
purposes. This will depend on the quality and degree of
uniformity of the fill as placed. Note also that the charts
suggest that it is not possible (for the fill strengths
considered) to undermine a fill panel of 10.5 m width
without some form of additional reinforcement.
194
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-23.qxd 08/11/2003 20:31 PM Page 195
5 CONCLUSIONS
The FLAC model is capable of modeling both a “sag”
mode of failure as well as a “rotational” mode of failure
for a sill mat. For near-vertical or steep stope walls, the
sag mode is observed to occur and is dominant. For flatter dips, it is possible to observe a rotational mode of
failure, as the fill falls away from the hangingwall, and
eventually rotates about the footwall support.
The objective of this study was limited to the overall
stability of the sill mats, and excluded consideration of
minor falls of fill from the back that must be expected
to occur unless appropriate mat reinforcing techniques
(e.g. properly anchored screen or shotcrete) are used.
For practical reasons, it is understood that the support
of the immediate back will be ensured through the
appropriate use of this type of reinforcing.
All of the analyses presented show that it is usually
possible, with sufficient binder, to create a stable mat
back under a variety of geometric and loading
conditions. However, this applies to the overall mat –
not the immediate back. Even with a very strong mat,
it is still possible to have falls of fill from the immediate back, unless some form of back support (e.g.
screen on the back, with bolts or Splitsets) is used.
This is equivalent to the screen commonly used on a
rock back.
This raises the possibility of incorporating the screen
with the mat reinforcing (e.g., screen placed on the floor
of the stope prior to filling). This screen will then be
exposed on the fill back as the panel is undermined. If
the screen is tied to the fill mat reinforcing, this will
take the place of the bolts and will eliminate the support cycle when the mat is undermined. This has been
successfully done at a number of mines, and is an
economical way to reinforce the fill mat (and has the
potential to save binder), as well as provide support
for the back of the undermined fill panel.
195
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-24.qxd 08/11/2003 20:31 PM Page 197
FLAC and Numerical Modeling in Geomechanics, Brummer et al. (eds)
© 2003 Swets & Zeitlinger, Lisse, ISBN 90 5809 581 9
FLAC numerical simulations of tunneling through paste backfill at
Brunswick Mine
P. Andrieux* & R. Brummer
Itasca Consulting Canada, Inc., Sudbury, Ontario, Canada
A. Mortazavi
Previously with Itasca Consulting Canada, Inc., Sudbury, Ontario, Canada
B. Simser*
Falconbridge Ltd., Sudbury Mines/Mill Business Unit – Craig Mine, Onaping, Ontario, Canada
P. George*
New Brunswick, Canada
*previously with Noranda, Inc., Brunswick Mine, Bathurst, New Brunswick, Canada
ABSTRACT: In early 2001 Itasca Consulting Canada Inc. was contracted by Noranda Inc. to assist in the
design of the first two drifts that were going to be driven through paste backfill at Brunswick Mine in the south
end of the 1000 m Level in order to create alternate accesses to the western ore zones. A numerical stability
analysis of the proposed tunnels was carried out by means of two-dimensional FLAC simulations, which took
into account different fill strengths, alternate tunnel geometries, various floor conditions and the presence of
unconsolidated plugs of waste rock within the paste backfill at close proximity to the tunnel in one area. The
main objectives of this work were to investigate the self-standing characteristics of the exposed paste material,
evaluate the deformations expected as a result of tunneling through it and recommend adequate ground support
alternatives. This paper describes the modeling approach used, the results obtained and how they corresponded
to the behaviors later encountered underground during the excavation of the tunnels.
1 INTRODUCTION AND BACKGROUND
Itasca Consulting Canada Inc. (ICCI) of Sudbury,
Ontario, was contracted to assist in the design of two
drifts that were going to be tunneled through paste
backfill in the south end of the 1000 m Level at the
Noranda Inc. Brunswick Mine operation near Bathurst,
New Brunswick. Drifting through the paste backfill
was required in order to create alternate accesses to
the western ore zones because some of the existing
accesses were either in highly stressed ground that
could burst, or were planned to be removed when future
stopes were going to be mined. Tunneling through paste
backfill being then a new procedure at Brunswick
Mine, it was decided by senior engineering personnel
at the site that a thorough numerical investigation was
necessary to identify possible design limitations.
The numerical analyses of the process of driving
through paste backfill were carried out at the ICCI
offices in Sudbury by means of two-dimensional
FLAC simulations that used actual fill strengths,
geometry, floor conditions and other expected field
conditions. The main objectives of this work were to
investigate the self-standing characteristics of the
exposed paste material and the deformations
expected as a result of tunneling through it. A series
of numerical exercises were completed with the
FLAC code to address these objectives for drifts of
various shapes driven in paste materials of varying
cohesive strength. Two situations were simulated:
(1) the situation in the 236-8 Access on 1000-2
sub, where failed waste rock (which had caved from
the back of the drift) and unconsolidated rockfill
material (which had run from the 235-8 and 237-8
stopes above) ended below the paste material with a
near-45° angle of repose; and, (2) the situation in the
129-7 Access on 1000-1 sub, where only paste material was present.
197
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-24.qxd 08/11/2003 20:31 PM Page 198
2 GENERAL APPROACH
As mentioned, the FLAC numerical analyses performed
focused primarily on investigating the free-standing
characteristics of the paste backfill as it is excavated,
without any support. This was deemed important for
safety reasons (i.e. for assessing the level of risk the
underground crews performing the excavation work
were going to be exposed to), and for defining the
long-term support requirements of the excavation.
A sensitivity analysis was carried out for this
aspect of the work, whereby the cohesive strength of
the paste material was varied over a reasonable range,
in order to identify threshold values with regard to
instability. These threshold values were then compared to the values measured in the paste backfill in
both the 129-7 and 236-8 excavation areas.
This numerical sensitivity analysis also examined
the effect the tunnel shape has on the transfer of the
loads around it. Two profiles, a flat back and a pronounced horseshoe shape, were modeled, to determine
the impact of shape on the self-standing stability of
the tunnel. This analysis also produced deformation
and convergence data for all the cases examined,
N
16.00
15.00
14.00
13.00
12.00
11.00
10.00
9.00
8
9
10
11
12
13
14
15
16
17
18
19
Figure 1. Front view looking from the footwall into the
236-8 Access on 1000-2 sub. This photograph was used to
build the numerical model. The mesh and drift outline visible in the foreground were generated by Microsoft Excel™,
using the “digitizer mode”. The scale was obtained from the
lines painted on the face visible on the background.
which were important to derive adequate long-term
support requirements. The two-dimensional approach
was deemed adequate based upon the geometry of the
tunnels, which were much longer in the third dimension. It however did not allow the examination of the
actual driving process, whereby local stresses redistribute around and ahead of the tunneling front.
The dimensions used in the FLAC model were based
on measurements made on site at the beginning of the
excavation process. Photographs were taken underground from which precise scaling was done in order
to generate a very representative numerical mesh.
Figure 1 shows a front view of the drift that was used to
construct the numerical model.
The FLAC strain-softening/hardening model was
used to capture the non-linear behavior of the paste
backfill material in its post-elastic range. This particular model considers the cohesion, tensile strength and
friction angle to change as a function of the cumulative plastic strain within the material. In the numerical
analyses performed, it was assumed that the cohesion
and tensile strength of the paste backfill dropped
to 25% of their original values after the material had
experienced a cumulative plastic strain of 1.5%. (These
settings were based upon previous Itasca modeling
experience.)
The simulations were designed such that they represented the actual sequence of events leading to the
drift excavation. The models were initially cycled to
equilibrium in order to simulate the various cured
and hardened backfilling materials present. The drift
was then excavated and the models cycled to equilibrium, with stresses and displacements being monitored throughout the cycling process.
The failure mechanisms within the paste backfill and
the stability of the drift were investigated as a function
of the strength of the paste itself and of the various
materials surrounding it. Table 1 shows a brief summary of the model input data used in these parametric
analyses.
The cohesive strength can be used to get an idea
of the compressive strength of the material – assuming
a 30° friction angle, cohesion is about 25% of the
unconfined compressive strength (UCS). Hence, a
400 kPa cohesive strength paste material would have
a UCS of about 1.6 MPa.
Table 1. Input property data used in the FLAC numerical analyses.
Material type
Bulk
modulus
(MPa)
Shear
modulus
(MPa)
Material
density
(kg/m3)
Cohesion
(kPa)
Tensile strength
(kPa)
Friction
angle
(degrees)
Paste backfill
Caved waste
Rockfill
400
100
120
240
60
70
2000
2700
2700
50 to 400
zero
0.0 and 50.0
Half of cohesion
Half of cohesion
Half of cohesion
32
35
35
198
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-24.qxd 08/11/2003 20:31 PM Page 199
3
FLAC SIMULATIONS
Simulations were run for the following cases:
(1) a horseshoe shape drift driven with loose material
on both sides; (2) a flat back drift also developed
with loose material on both sides; (3) a horseshoe
shape drift driven without any loose material on either
side; and, (4) a horseshoe shape drift driven without
any loose material on either side, but with a horizontal discontinuity in the paste material directly above it
(in order to investigate potential large-scale slabbing
of the paste into the tunnel).
3.1
Case 1 – arched back drift, with loose waste
material on both sides
This situation prevailed in the 236-8 Access on 1000-2
sub, where caving had occurred along a band of weak
waste rock inside the original drift, and some of the
Paste Fill
Loose Waste
Rock fill
dry rockfill placed between 1000-3 sub and 1000-2 sub
in the secondary stopes on both sides of this access
had run into the area due to local caving on the 1000-2
sub horizon. Despite repeated attempts to remove this
waste material, uncontrolled runs of fill had resulted
in significant amounts of loose material being present
above the 1000-2 sub elevation at the time the paste
backfill was poured in the 236-8 Access. This, as
shown in Figure 1, resulted in loose material being
located on both sides of the future drift, at a repose
angle of about 45°.
Figure 1 also shows the numerical grid, geometry
and boundary conditions of the model constructed for
this first series of runs. Paste material cohesion values
of 50, 100 and 400 kPa were investigated – the results
indicated stable self-standing conditions for a paste
material with a cohesive strength greater than 50 kPa.
As shown in Figure 2, a 50 kPa cohesion resulted in
the prediction of a maximum displacement of over
31 cm 12,000 cycles into the simulation. Further
stepping of the model (to 15,760 cycles) confirmed
the complete failure of the paste backfill material and
clearly described the paste failure mechanism taking
place under the simulated conditions.
It is interesting to note that the back failure was not
as pronounced as that of the walls. As intuitively
expected, the simulation confirmed that, under vertical
(gravity) loading conditions, most of the vertical load
around the excavation is deflected and concentrated in
the drift walls.
The existence of weak contacts between the paste
backfill and the loose waste material towards the bottom and on both sides of the drift initiated a deformation of the paste along this contact. This, in turn, led to
the shearing of paste material on both sides of the drift.
After the side wall failure, the process propagated
upwards and led to the shearing of the paste material
above the drift, as shown in Figure 3. A maximum displacement of as much as 1.20 m was observed at this
later stage. Moreover the unbalanced force history
within the model showed that after the initiation of failure the unbalanced force continued to increase, indicating that a progressive failure kept on evolving within
the model as no state of equilibrium was being reached.
3.2
Figure 1. Material regions (top), and numerical grid,
geometry and boundary conditions (bottom) of the model
constructed for the first series of simulations.
Following this first set of analyses it was decided to further investigate the failure mechanisms by considering
a worst-case drift geometry, which would correspond
to a flat back profile. In this case, one would intuitively
expect significant roof deformation and failure. All the
FLAC simulations done for this case were conducted
using identical boundary conditions and input data as
for the previous case, except for the geometry of the
tunnel itself.
199
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
Case 2 – flat back drift, with loose waste
material on both sides
09069-24.qxd 08/11/2003 20:31 PM Page 200
Figure 2. Displacement vectors at step 12,000. A maximum displacement of over 31 cm was predicted in this case.
Comparing Figure 4 and Figure 2, which both correspond to the same paste material cohesive strength
of 50 kPa and the 12,000th analysis step, shows that
the maximum displacement predicted is significantly
larger in the case of the flat back geometry (1.31 m vs.
only about 0.31 m) – this does highlight the improved
stability the arched back geometry provides.
The same failure mechanism (i.e. a side walls failure
first, followed by a shearing effect through the overlying paste material) is however seen in both the flat and
arched back arrangements.
As in the case of the arched back profile, 100 and
400 kPa paste backfill cohesive strengths resulted in the
material maintaining its integrity and the drift remaining stable regardless of its profile. With a 100 kPa paste
material cohesion the same overall results were obtained
as with the arched back case, but more displacement
was predicted.
The analyses also showed that if the area backfilled with paste material is damaged, due to dynamic
loading from blasting, for example, then the underlying loose waste material does not offer much support
against vertical movement in the paste backfill, which
could potentially lead to large and even catastrophic
failures in the paste material.
200
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-24.qxd 08/11/2003 20:31 PM Page 201
Figure 3. Deformed model geometry at step 15,760.
3.3
Case 3 – arched back drift, with no loose waste
material on the sides
The aim of this set of analyses was to investigate the
stability of a drift driven through paste backfill under
“normal” conditions, i.e., with no loose waste material
in the pasted region and with the paste material poured
directly on compacted rockfill. This situation, illustrated in Figure 5, corresponded to the situation in the
129-7 Access in the south end of the 1000 m Level #1
sub-level elevation. Three different cohesive strength
values were again considered for the paste backfill,
which were 25, 50 and 100 kPa in this case.
No major displacement was predicted to occur in
the drift for the cases of the 50 and 100 kPa cohesion.
For the 50 kPa cohesion case a maximum displacement
of just under 3.7 cm was predicted, whereas this maximum displacement was predicted at just over 3 cm for
the 100 kPa cohesion case.
201
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-24.qxd 08/11/2003 20:32 PM Page 202
Figure 4. Displacement vectors at step 12,000 (50 kPa cohesion, flat back drift profile).
3.4
Paste Fill
Rock fill
Figure 5. View of the material regions modeled in FLAC for
the case of the arched back drift, with no loose waste material
around the drift.
However, complete failure of the drift was predicted
to occur when driven in 25 kPa cohesive strength paste
backfill. Figure 6 shows the displacement vectors in
this case, 8000 cycles into the simulation.
Overall, and as intuitively expected, indications
were that the absence of 45° piles of loose material
underneath the paste fill helped significantly with
respect to the stability of a tunnel driven through it.
The objective of this analysis was to simulate the effects
of a weak horizontal cold joint within the paste backfill, which could have been caused, for example, by
interruptions during the pouring process. If sufficiently
long interruptions occur in the normally continuous
filling process, the previously placed material can cure
sufficiently, eventually resulting in a strength discontinuity at the contact with more recently poured material.
As shown in Figure 7, a horizontal interface element
was thus incorporated at a distance of 1.5 m above the
drift back, which represented a very adverse situation
with regard to a potential layer of material in the back
of the drift developing instability. Zero cohesion and
zero tensile strength were assigned to the interface, in
order to consider the worst-case scenario. The model
was run using a 50 kPa cohesive strength paste material.
The displacement results are presented in Figure 8.
As shown, the presence of the horizontal discontinuity did not affect the overall behavior of the drift.
Comparing Case 3 for a 50 kPa cohesion (which
showed an identical situation, but without the horizontal discontinuity) and Case 4, the maximum displacement observed remains small (3.7 cm without
the discontinuity vs. 3.6 cm with it).
It should be noted that a fairly weak paste backfill
(with only a 50 kPa cohesive strength) was used in
Case 4. For the “ordinary” strength paste fill used at
Brunswick Mine (with a 400 kPa cohesive strength), the
202
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
Case 4 – arched back drift with no loose waste
material on the sides, but with a horizontal
discontinuity in the paste fill above it
09069-24.qxd 08/11/2003 20:32 PM Page 203
Figure 6. Displacement vectors for a cohesion of 25 kPa. This situation evolved into the complete collapse of the tunnel.
Paste filled region
Interface element
Rock fill region
Figure 7. Addition of an interface element to model a horizontal discontinuity in the paste fill material.
effect of a horizontal discontinuity can, for all intended
purposes, be ignored.
4 GENERAL OBSERVATIONS DURING THE
FIELD WORK
Two different excavation methods were tried underground during the development of these tunnels: a
mechanical one, and a drilling and blasting one. Both
methods showed promise, but initially required a subsequent finishing step to be carried out to smooth the final
paste arch. As expected, the Brunswick Mine 400 kPa
cohesive strength paste backfill stood well during the
development phase. Based upon the observations
made underground during a three-week period, the most
significant improvements that could be made to the
development procedure in paste backfill would be:
(1) the development of a mechanical scraping
machine, which would remove and trim all ridges and
undulations along the initial excavation boundaries;
or, (2) the adjustment of the drilling and blasting
practice, in order to precisely cut the proper shape and
eliminate damage to the excavation surface.
A combination of both could potentially yield the
best results, such as the rough mechanical excavation of
a center cut, followed by the trimming to the proper
shape using controlled blasting. This approach was
implemented with success in February 2001. It consisted of excavating a center plug with a scooptram,
and of trimming the tunnel to its final dimensions using
lightly charged (with B-line detonating cord only)
blastholes, including a series of trim blastholes drilled
on a 20 cm (8 in) spacing directly along the planned
periphery of the tunnel. Good results have also been
reported when using a purely mechanical excavation
approach, without any subsequent blasting. In these
tests, a scooptram-mounted scaler normally used to
scale unstable areas was used to trim the excavation to
its final shape, after a center cut had first been exca-
203
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-24.qxd 08/11/2003 20:32 PM Page 204
Figure 8. Displacement vectors for a cohesion of 50 kPa. A maximum displacement of just over 3.6 cm was predicted in
this case.
N
Figure 9. Photograph looking west in the 236-8 Access on
1000-2 sub on the footwall side showing the results of the
third round blasted there in January 2001.
vated with an 8 yd3 scooptram. Certain precautions
were however required in order to attain these results,
such as carefully leveling the floor beforehand, and
ensuring no ground support elements were sticking out
above the tunnel surface. This approach also reportedly provided an overall quick cycle time.
Significant cycle time improvements can be
achieved if a smooth initial arch profile is obtained on
a “first pass” since this potentially allows one to defer
the application of the required second layer of shotcrete until the end of the excavation process. The postponement of the second layer of shotcrete can however
only be considered if a proper arch is created, if no
cracks develop in the initial layer of steel fiber-reinforced shotcrete, and if no abnormal inclusions are
encountered in the surrounding paste material during
the bolting cycle.
Figure 9 shows the type of results that were obtained
with the blasting approach after it was optimized. The
effective advance achieved with this particular shot
was 4 m (13 ft), and, as can be seen, the blast was quite
successful and produced a uniform fragmentation.
ACKNOWLEDGEMENTS
The authors would like to thank Noranda Inc. for the
permission to present these data and publish this paper.
204
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-25.qxd 08/11/2003 20:32 PM Page 205
FLAC and Numerical Modeling in Geomechanics, Brummer et al. (eds)
© 2003 Swets & Zeitlinger, Lisse, ISBN 90 5809 581 9
FLAC3D numerical simulations of ore pillars at Laronde Mine
R.K. Brummer & C.P. O’Connor
Itasca Consulting Canada Inc., Sudbury, Ontario, Canada
J. Bastien, L. Bourguignon & A. Cossette
Agnico-Eagle Mines – Laronde Mine, Cadillac, Quebec, Canada
ABSTRACT: On November 27, 2002 Agnico Eagle’s Laronde Mine experienced a magnitude 2.6 seismic
event. As part of the investigation into the cause of the burst, a high-resolution FLAC3D model was created to
determine the effect of the mining sequence on stresses in the area of the burst. At this mine, secondary stopes
are intended to fail following primary stope extraction. The numerical simulations showed that where remnants
were left with non-ideal geometry (through unfortunate but necessary mining decisions), these remnants could
be too strong to yield as intended.
The FLAC3D model showed that one such 3-wide pillar centered at the location of the burst was subject to a
local high stress concentration. This provided a unique opportunity to confirm calibration of the FLAC3D model.
Further modeling also highlighted other areas of the mine where pillars were in a high stress state and recommendations were made to alter the mining sequence to prevent future events.
1 INTRODUCTION
Agnico Eagle’s Laronde Mine is a high-tonnage
underground mining operation in the Abitibi mining
district in Northern Quebec. Currently the majority of
the mining takes place at a depth of 1500 meters but a
new mining horizon starting on 2150 meters has been
in production since early 2002 and will become the
major producing area of the mine as the upper levels
become depleted.
On November 27, 2002 the mine experienced a
magnitude 2.6 rockburst between the main levels of
149 and 152 and centered along the main access into
these levels. Damage on the 149 Level was light to
moderate with some floor heaving and spalling along
the footwall. On the 152 Level the damage was much
more extensive and resulted in a large failure in the
main intersection of the level.
The burst occurred approximately 2 hours after a
small slot blast in stope 146-20-62, a secondary stope
expected to be carrying little stress. The slot blast was
quite small and was not a likely trigger for the event
although the timing of the burst in close proximity to
the slot blast leaves this as a possibility. Fortunately no
one was in the area at the time. Typically the mines in
the area are seismically quiet which made the event that
much more troubling and the cause of the burst needed
to be found so similar situations could be avoided in
the future.
As part of the investigation into the cause of the
burst, a high resolution FLAC3D model was built in
order to examine the stresses throughout the region and
the role of the mining geometry on the event. Other
work being conducted at the mine provided a wellcalibrated set of properties to be used for this purpose.
2 MINE LAYOUT AND GEOLOGY
Laronde Mine is currently producing 7000 tpd. Main
production comes from the stopes in the 152 horizon
while new production levels down on the 215 Level
come online. In the coming years, the bulk of production is expected to come from the deeper levels as the
upper levels become depleted.
The geology of Laronde Mine is quite complex
with multiple ore bodies spaced parallel to each other
(of which 20-Zone is the major producer). The orebody is a gold-zinc massive sulphide with a thickness
ranging from 10 to 30 meters. Along each contact of
the orebody is a region of highly sheared schist material that can be up to 5 meters in thickness which can,
at times, present hangingwall stability problems. There
is also a regular banding of highly sheared material
205
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-25.qxd 08/11/2003 20:32 PM Page 206
Figure 1. A typical cross-section of the Laronde orebodies looking East showing the different rock elements.
throughout the footwall that is more prevalent in the
deeper sections of the mine. Figure 1 shows a typical
cross section of the Laronde mine as constructed in the
FLAC3D model.
The mine uses a primary-secondary blasthole stoping mining method. Stopes are all sized at 15 meters
along strike, 30 meters high, and the thickness of the
orebody, which typically ranges from 15 to 25 meters.
This stope dimension was chosen specifically so that
secondary stopes will be in a post-failure state after
primary mining. This helps to reduce stress problems
by forcing the stresses to the abutments instead of
secondary stopes and generally makes secondary
mining easier.
Pastefill is currently the backfill of choice for primary stopes in the upper levels. Rockfill is used in
secondary stopes that will not be mined against. The
deeper levels of the mine currently use cemented rockfill until the paste system is extended into this area.
The mining sequence is based upon an expanding
chevron extending upwards from the 149 Level with
secondary stopes being mined first on the 152 Level.
Secondary stopes typically lag behind the primaries
by 2 stopes. For several reasons, the mining sequence
had some instances in which the ideal mining shape
could not be maintained. First, the main accesses to
the 21-Zone run directly through the 64 and 66 series
of stopes (refer to Fig. 2). This presented some stability
concerns for these accesses if the 65 stope was brought
up to its ideal position in the sequence. Additionally,
on the 152 Level, the secondary (i.e. even numbered
stopes) are mined first and were set up in a retreating
fashion from each abutment back towards the main
entrance of the level. These two scenarios combined
to make a series of pillars three stopes wide. Unlike a
single secondary stope, a three-wide stope is expected
to be too large to fail.
The burst appears to have been caused by a slippage along a foliated zone that runs parallel to the orebody and right through the back of the 152 Level.
This same foliated zone also passes through the lower
footwall of the 149 Level. The damage seen on both levels occurred along this contact. It was hypothesized
Figure 2. Long section looking North of Laronde showing
the current mining sequence.
that the high stresses being forced through the threestope-wide pillar on 152 level was the driving force
for the slippage along the foliated zone, but without a
numerical model to determine the stresses in the region,
no solid answers could be gleaned.
3 EVENT
The seismic event measured 2.6 on the Nuttli scale
and was centered on a foliated zone running between
the 149 Level and the 152 Level. An investigation
revealed what was thought to be a probably cause for
the event. The three stope-wide pillar centered in the
lower abutment on the 152 Level had been created
through the mining sequence which likely provided
the driving force for the event by concentrating stress
through this region. At the same time, the foliated
zone intersecting a long strike distance along both
upper and lower levels provided a method of release
by which the foliated zone was free to move. It was
believed that the intense stress concentration wrapping around the lower abutment and through the
three-wide pillar on the 152 Level provided enough of
a driving force to cause a slip along the foliated zone.
Most of the damage on 149 Level occurred on the
footwall side along the floor with lots of displaced
206
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-25.qxd 08/11/2003 20:32 PM Page 207
Foliated Zone
152-20-64
Stope
20-North Orebody. Mined and
Backfilled.
149 Level
Shear stress on
the foliations
152 Level
Stress trajectories
Figure 3. Simplified cartoon view of the intersection of
the foliated zone with the levels involved in the burst.
Figure 5. Looking East on the 152 Level. The damage is
more severe especially to the east. A large amount of material up to 2 meters deep is seen in the main entrance to the
level on the lower left.
4
Figure 4. Damage on the 149 Level. Most of the debris
came from the base of the footwall (right side) with some
additional secondary bagging of material in the screen
(upper left).
slabbing and some bagging of material in the screen (see
Fig. 4). On the 152 Level, the most damage occurred
right in the back of the stope with the large intersection failure being the dominant feature. Accessibility
to the east was limited but most of the damage
seemed to occur towards this direction (see Fig. 5).
One of the other questions that arose in the aftermath of the burst was how to ensure that a similar situation did not occur again. Since the burst appeared
to have been caused by a combination of the mining
sequence and the unfortunate location of the foliated
zone running directly through two main drifts, this
particular mechanism might be a one-time event.
However, this does not eliminate the possibility that
pinch points in other areas could not cause seismicity
through another mechanism.
In order to try and determine the validity of this
theory, a high resolution FLAC3D model of the area was
created in order to determine the anticipated stresses
and failure zones passing through the three-wide pillar.
At the time of the event, Itasca was actively involved
in modeling using FLAC3D at Laronde Mine on
another project. From this other work and previous
projects at the mine going back to 1997, a wellcalibrated set of material properties and stresses were
available for the model. Previous model work however did not have sufficient resolution to be useful in
such a specific case and so a more detailed model of
the region was created.
The model generated for the burst investigation
focused on the 152 mining horizon with a block size
through the area of interest of 3 meters on a side. With
the stopes 15 meters wide this provided 5 blocks along
the strike of the stope which was deemed important to
ensure a proper modeling of pillar and confinement
effects.
5 RESULTS
The FLAC3D model provided evidence that the
assumption of the three-wide pillar being created
through the retreating extraction sequence resulted in
a pillar that was too large to fail and hence became a
stress concentrator. Figure 6 shows a principal stress
plot on a long section looking North through the orebody. The location of the burst matches nearly perfectly
with the high stress concentration predicted in the
FLAC3D model.
Figure 7 (which is the section marked as A-A in
Figure 6 through the 64 stope) gives an indication of
how the stress concentration in the pillar acts on the
foliated zone some 30 meters into the footwall, causing
it to slip. The stresses are deflected under the lower
abutment and concentrated through the three-wide
pillar, resulting in a vertical stress component. This
207
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
FLAC3D MODEL
09069-25.qxd 08/11/2003 20:32 PM Page 208
Figure 6. Maximum principal stress plot looking North showing the location of the three high stress pillars and the location
of the burst.
Figure 7.
A cross section looking East through the region of the burst (section A-A in Fig. 6).
vertical component appears to have provided enough
localized stress on the foliated zone to cause the slip.
From the mining plan, there are two other threewide pillars that appear to be concentrating stresses.
A series of modeling runs was conducted in order to
determine how the short-term mining plan needed to
be adjusted to prevent additional stress building up in
these areas. Figure 6 shows these areas above and to the
East of the location of the burst. These two stopes,
although not as critical as the one that caused the
burst, were cause for concern. The short term mining
plan did not include these particular stopes although
after the modeling, recommendations were made to
mine these stopes as early as possible.
The additional scenarios showed that the mining
of adjacent stopes created incremental increases in
the stresses in these areas, so although they need not
be mined immediately, a rapid development and
208
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-25.qxd 08/11/2003 20:32 PM Page 209
Figure 8. Maximum principal stress plot showing the changes caused by mining 143-20-65 stope.
Figure 9. Maximum principal stress along a long section looking North following the mining of 155-20-59 stope in the bottom
left.
production schedule should be implemented in order
to avoid further seismic events in the region.
Using the simulations for the short term mining
plan of the area, it was determined that the best scenario would involve mining the 143-20-65 pillar first.
Figure 8 shows the stresses around the 152 mining
horizon after mining out of 143-20-65 stope. The decision to recommend mining this stope first was it was
made because it was postulated that the burst had
likely dissipated some of the stored energy in 152-2064 stope and it was therefore unlikely that a second
seismic event would occur in the short term. Also
some significant rehabilitation on 152-level would
delay the development and production of this stope by
a couple of months. The mining of 143-20-65 would
not shed much additional stress on the other stopes but
209
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-25.qxd 08/11/2003 20:32 PM Page 210
would take care of the most worrisome of the remaining three-wide areas.
The mining of 143-20-65 stope would shed a small
amount of additional stress on 143-20-69 but this stope
was partially protected by the lead primary stope
between them. By the time 143-20-65 was mined and
filled, rehabilitation of the 152 Level should be nearly
completed which would then be immediately developed to allow the mining of 152-20-64 (the location
of the burst). This should push the entire lower abutment stress below the 152 level and relieve what stress
was left after the burst. Finally, 143-20-69 does not
appear to be critical in the short term as most of the
mining in this area is to the west and this stope is well
shielded from these stopes.
In order to provide some short-term production
while the 152 Level was closed for cleanup operations,
the possibility of taking a stope down on 155 Level was
examined. Figure 9 shows the results of the modeling
of this particular scenario. A concentration of stresses
appears to occur two stopes away on either side of the
mined stope. The proximity of this increased stress to
the location involved in the burst resulted in a recommendation not to mine this particular stope until 15220-64 was mined, relieving this stress concentration.
6 CONCLUSION
Based on the on-site investigation and the FLAC3D
modeling, the mechanism responsible for the burst
appears to have been well established. A three stope
wide pillar on the 152 Level resulted in a large stress
concentration. This stress concentration resulted in an
increased vertical stress component in the footwall of
the orebody, allowing the foliated zone to slip
between the 149 Level and the 152 Level.
The FLAC3D model was also able to provide recommendation on which other areas might be of concern as well as the best sequence in which to take care
of these problem areas. Finally, the modeling showed
that mining of a stope down on the 155 Level would
not be prudent at this stage until the three-wide pillar
responsible for the burst was removed.
ACKNOWLEDGEMENTS
The authors thank Agnico Eagle Mines for permission to publish this paper.
210
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-26.qxd 08/11/2003 20:33 PM Page 211
FLAC and Numerical Modeling in Geomechanics, Brummer et al. (eds)
© 2003 Swets & Zeitlinger, Lisse, ISBN 90 5809 581 9
Modeling arching effects in narrow backfilled stopes with FLAC
L. Li, M. Aubertin & R. Simon
École Polytechnique de Montréal, Quebec, Canada
B. Bussière & T. Belem
Université du Québec en Abitibi-Témiscamingue, Quebec, Canada
ABSTRACT: Numerical tools can be very useful to investigate the mechanical response of backfilled stopes. In
this paper, the authors show preliminary results from calculations made with FLAC. Its use is illustrated by showing
the influence of stope geometry. The results are compared with analytical solutions developed to evaluate arching
effects in backfill placed in narrow stopes. Some common trends are obtained with the two approaches, but there
are also some differences regarding the magnitude of the stress redistribution induced by fill yielding.
1 INTRODUCTION
Even though backfill has been placed in underground
stoping areas for many decades, it can be said that backfilling still remains a growing trend in mining operations around the world. This is particularly the case in
Canada where significant efforts have been devoted,
over the last 25 years or so, to improve our understanding of mining with backfill (e.g. Nantel 1983, Udd
1989, Hassani & Archibald 1998, Ouellet & Servant
2000, Belem et al. 2000, 2002).
In recent years, the increased use of backfill in mining has been fuelled by environmental considerations
(e.g. Aubertin et al. 2002). Many regulations now favor
(and sometimes require) that the maximum quantity of
wastes from the mine and the mill be returned to underground workings. This practice may induce significant
advantages, as it can reduce the environmental impact
of surface disposal and the costs of waste management during mine operation and upon closure.
The first purpose of mine backfill is nevertheless to
improve ground control conditions around stopes.
Various types of fills can be used to reach this goal,
each with its own characteristics. Backfill is often
required to offer some self support properties, so it generally includes a significant proportion of binder such as
Portland cement and slag. But even the strongest backfill is “soft” when compared to the mechanical properties of the adjacent rock mass. This difference in
stiffness and yielding characteristics between the two
materials can be the source of a stress redistribution in
the backfill and surrounding walls, as deformation of
the backfill under its own weight may create shear
stresses along the interface. For relatively narrow
stopes, the load transfer to the stiff abutments induces
arching effects. When this phenomenon occurs, the vertical stress below the main arching area tends to become
smaller than the backfill overburden pressure, as shown
by in situ measurements (e.g. Knutsson 1981, Hustrulid
et al. 1989).
The same type of arching behavior is also known
to occur in other types of structural systems, where a
relatively soft material (like soil and grain) is placed
between stiff walls; examples include silos and bins
(Richards 1966, Cowin 1977, Blight 1986), ditches
(Spangler & Handy 1984), and retaining walls (Hunt
1986, Take & Valsangkar 2001).
Arching effects and load redistribution can be investigated using physical models, in situ measurements,
analytical solutions, and numerical methods. The latter
two approaches are particularly attractive to identify the
main influence factors, and to evaluate how these may
affect the load distribution in and around backfilled
stopes.
In a recent paper (Aubertin et al. 2003), the authors
have proposed simple equations based on the Marston
(1930) theory to evaluate the load distribution in stope
backfill. The results of analytical calculations have been
compared to numerical modeling performed with a
commercially available finite element code. The calculation results highlighted some important differences
between the two approaches, for the specific set of
assumptions adopted.
In this paper, the authors use FLAC (Itasca 2002) to
further advance our understanding of the load transfer
process in and around narrow backfilled stopes. In
these calculations, some of the assumptions and input
conditions differ from the previous FEM calculations,
211
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-26.qxd 08/11/2003 20:33 PM Page 212
including the use of a somewhat more representative constitutive model for the backfill. The mining
sequence is also taken into account. It is shown that for
specific cases amenable to analytical solutions, the calculated results from both approaches are fairly close to
each other.
rock mass
layer element
void space
backfill
stope
h
V
dh
2 ARCHING EFFECTS
H
Arching conditions can occur in geomaterials such as
soil, jointed rock mass and backfill, when differential
straining mobilizes shear strength while transferring
part of the overburden stress to stiffer structural
components.
Arching typically occurs when portions of a frictional material yield while the neighboring material
stays in place. As the yielding material moves between
stable zones, the relative movement within the former
is opposed by shear resistance along the interface with
the latter. The shear stress generated along the contact
area tends to retain the yielding material in its original
position. This is accompanied by a pressure reduction
within the yielding mass and by increased pressure on
the adjacent stiffer material. Above the position of the
main arch, a large fraction of the total overburden
weight in the yielding mass is transferred by frictional
forces to the unyielding ground on both sides.
Investigations on models and in situ measurements
have shown that the magnitude of the stress redistribution depends to a large extent on the deformation of the
walls confining the soft material (e.g. Bjerrum 1972,
Hunt 1986).
A few analytical solutions have been developed to
analyze the pressure distribution since the pioneering
work of Janssen (1895) (see Terzaghi 1943 for early
geotechnical applications). Among these, the Marston
(1930) theory was proposed to calculate the loads on
conduits in ditches (see also McCarthy 1988). The
authors have used this theory to develop an analytical
solution for arching effects in narrow backfilled stopes
(Aubertin 1999).
Figure 1 shows the loading components for a vertical stope. On this figure, H is the backfill height, B the
stope width, and dh the size of the layer element; W
represents the backfill weight in the unit thickness
layer. At position h, the horizontal layer element is subjected to a lateral compressive force C, a shearing force
S, and the vertical forces V and V dV.
The force equilibrium equations for the layer element provide an estimate of the stresses acting across
the stope (Aubertin et al. 2003). From these, the vertical
stress can be written as follow:
C
W
S
S
B
V + dV
rock mass
B
Figure 1. Acting forces on an isolated layer in a vertical
stope.
with
(2)
where vh and hh are the vertical and horizontal
stresses at depth h, respectively; represents the unit
weight of the backfill; is the effective friction angle
between the wall and backfill, which is often taken as
the friction angle of the backfill, bf. Equations 1 and
2 constitute the Marston theory solution. In this representation, K is the reaction coefficient corresponding to
the ratio of the horizontal stress hh to vertical stress
vh. This reaction coefficient depends on the horizontal
wall movement and material properties. When there is
no relative displacement of the walls, the fill is said to
be at rest, and the reaction coefficient is usually given
by (Jaky 1948):
(3)
where bf is the friction angle of the backfill. For typical fill properties ( bf ≅ 30° to 35°), K0 is much
smaller than unity.
If the walls move outward from the opening, the
horizontal pressure might be relieved, and the reaction
coefficient tends toward the active pressure coefficient,
which can be expressed as (Bowles 1988):
(4)
with Ka K0. If an inward movement of the walls
compress the fill, it increases the internal pressure.
Then, the reaction coefficient tends toward the passive
condition, which becomes (Bowles 1988):
(1)
212
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
dh
C
(5)
09069-26.qxd 08/11/2003 20:33 PM Page 213
shh
Marston theory
void space
shh
0.3
overburden
rock mass
E = 300 MPa
H = 45 m
for B = 6m
0.2
0.1
(linear elastic)
= 0.2
ã = 1800kg/m3
' = 30°
E = 30 GPa
= 0.3
= 2700 kg/m3
c = 0 kPa
0
0
1
2
h/B
3
y
4
B=6m
Figure 2. Overburden pressures are compared to vertical
(vh) and horizontal (hh) stresses calculated with the Marston
theory (Eqs. 1–2), with bf 30°, 0.02 MN/m3, and
K K0 0.5.
with Kp 1 K0.
In the above equations, it is assumed that cohesion is
low in the backfill; the fill then behaves as a granular
material. Based on limit equilibrium, it can be anticipated that a cohesion would increase Kp but decrease
Ka. However, more work is needed to investigate its
influence on arching effects and stress distribution.
Figure 2 shows values of vh and hh calculated with
Equations 1 and 2 (with K K0 0.5), and calculated
with the overburden pressure (i.e. vh h and
hh K0 vh). It can be seen that the overburden stress
represents the upper-bound condition, which is applicable for low fill thickness (or for wide stopes). Typically, when H 2 to 3B, the pressure near the bottom
of the stope becomes more or less independent of the
depth of the fill, in accordance with measurements in
bins (Cowin 1977).
3 NUMERICAL CALCULATIONS
3.1
v natural stresses
h = 2v
backfill
svh
0.4
stress (MPa)
0.5m
svh
0.5
Vertical stope
Recently, the authors have shown some preliminary
calculation results obtained with a finite element
code (Aubertin et al. 2003). Significant differences
have been revealed between the Marston theory and
these numerical calculations, which may be
explained, in part, by different assumptions associated to the two approaches. In this paper, the same
geometry and material properties (Fig. 3a) are used for
the basic calculations made with FLAC. The dimensions of the opening are H 45 m and B 6 m, with
a void of 0.5 m left at the top of the stope. The natural
in situ vertical stress v in the rock mass is obtained
x
(a)
1
(b)
1
Figure 3. (a) Narrow stope with backfill (not to scale)
used for modeled with FLAC; the main properties for the rock
mass and backfill are given using classical geomechanical
notations; (b) Schematic stress-strain behavior of the backfill
(available as a material model in FLAC).
by considering the overburden weight (for an overall
depth of 250 m). The natural in situ horizontal stress h
is taken as twice the vertical stress v, which is a typical situation encountered in the Canadian Shield. The
rock mass is homogeneous, isotropic and linear elastic,
while the granular backfill obeys a Coulomb criterion.
Figure 3b shows the stress-strain relation used with the
Coulomb plasticity model available in FLAC. This constitutive behavior is different from the one used for the
finite element calculations presented in Aubertin et al.
(2003), which was of the elastic-brittle type. There are
213
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
depth = 250 m
rock mass
09069-26.qxd 08/11/2003 20:33 PM Page 214
modeling with FLAC-2D
0.8
overburden stress
yy (MPa)
0.6
Marston theory
K = 1/3
K = 1/2
K=3
0.4
0.2
0
0
9
18
(a)
36
45
modeling with FLAC-2D
overburden stress
Marston theory
0.3
xx (MPa)
27
h (m)
0.2
K=3
0.1
K = 1/2
K = 1/3
0
0
(b)
9
18
27
36
45
h (m)
Figure 5. Comparison of the stresses calculated along the
vertical central line, at different elevations h, with the analytical and numerical solutions: (a) vertical stress yy; (b) horizontal stress xx.
Figure 4. Stress distribution in the backfilled stope calculated with FLAC: (a) vertical stress yy; (b) horizontal stress
xx.
no interface elements in the calculations made with
FLAC (see discussion).
The mining and filling sequence is considered as
follow in the numerical modeling. The whole stope is
first excavated, and calculations are then performed
with FLAC to an equilibrium state. Backfill is placed in
the mined stope afterward, with the initial displacement
field set to zero when the calculation is performed.
In this manner, wall convergence before backfilling is
not included in the calculations (this assumption is
discussed in Section 4).
Figure 4 shows the vertical stress (Fig. 4a) and horizontal stress (Fig. 4b) distribution in the backfilled
stope. As can be seen, the vertical and horizontal
stresses show a non-uniform distribution. At a given
elevation, both stresses tend to be lower along the wall
than at the center. The stresses along the central line
increase more slowly than the overburden pressures
with depth. This indicates that arching does take place
in this backfilled stope.
Figures 5 and 6 present modeling results for stresses
along the full height, with the overburden and the
214
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-26.qxd 08/11/2003 20:33 PM Page 215
modeling with FLAC-2D
0.8
modeling with FLAC-2D
overburden stresses
Marston theory
1.2
over burden stress
Marston theory
0.8
σyy (MPa)
σyy (MPa)
0.6
K = 1/3
K = 1/2
K=3
0.4
0.2
K = 1/3
K=3
0.4
K = 1/2
0
0
9
18
(a)
36
0
45
0
h (m)
2
(a)
modeling with FLAC-2D
0.2
overburden stresses
Marston theory
Marston theory
K=3
0.1
0.2
K = 1/2
K = 1/3
0
9
18
K=3
0.1
K = 1/3
0
6
modeling with FLAC-2D
0.3
K = 1/2
(b)
4
x (m)
overburden stress
σxx (MPa)
σxx (MPa)
27
27
36
0
45
0
h (m)
(b)
Figure 6. Comparison of the stresses on the wall calculated
at different elevations h, with the analytical and numerical
solutions: (a) vertical stress yy; (b) horizontal stress xx.
Marston theory solutions. As expected, the overburden
stress is fairly close to analytical and numerical results
when the backfill depth is small. At larger depth, arching effects become important and the vertical and horizontal stresses tend to be lower than those due to the
overburden weight of the fill. However, the numerical
results indicate that the Marston theory typically overestimates the amount of stress transfer, hence underestimating the magnitude of the vertical stress yy and of
the horizontal stress xx along the stope central vertical
line (Fig. 5). Along the walls (Fig. 6), the horizontal
stress is also underestimated by the Marston theory,
while the vertical stress component yy would be overestimated for the active and at rest cases, with K 1/2
or 1/3, respectively (and underestimated with K 3,
but the passive case is not representative of this system
behavior).
Figure 7 shows the stress distribution on the floor of
the stope, as obtained from the numerical and analytical
solutions. It can be seen that the overburden pressure
4
6
x (m)
Figure 7. Stresses calculated at the bottom of the vertical
stope, with the analytical and numerical solutions; (a) vertical stress yy; (b) horizontal stress xx.
exceeds the stress magnitudes given by the Marston
theory (with K 1/2 and 1/3), which is in fair agreement with the numerical simulations.
3.2
Inclined stope
Mining stopes are rarely vertical. The inclination of the
foot-wall and hanging-wall may have a non-negligible
effect on the load distribution.
Figure 8 shows the geometry of an inclined backfilled stope modeled with FLAC (a similar stope was
also modeled with the FEM code – see Aubertin et al.
2003). The rock mass and fill properties as well as the
in situ natural stresses are identical to the previous case
(see Fig. 3).
Figure 9 shows numerical calculations and results
based on overburden pressure and on the Marston theory solution (without modification for inclination).
The horizontal stress calculated with FLAC along the
215
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
2
0.5m
09069-26.qxd 08/11/2003 20:33 PM Page 216
inclined central line of the stope is fairly close to the
analytical solution (Fig. 9a), but the vertical stress is
underestimated by the Marston theory (see Fig. 9b).
Hence, modifications could be required to apply such
analytical approach to the case of inclined stopes.
void space
backfill
h
4 DISCUSSION
H = 45 m
rock mass
B=6m
4.1
rock mass
v
stope
y
h = 2v
60˚
depth = 250 m
x
Figure 8. The inclined backfilled stope modeled with
FLAC (properties are given in Fig. 3).
modeling with FLAC-2D
overburden
Marston theory
xx (MPa)
0.2
K =3
0.1
K = 1/2
K = 1/3
h (m)
0
0
(a)
0.4
9
18
27
36
45
modeling without FLAC-2D
Influence of mining sequence
In the numerical calculations presented in Aubertin
et al. (2003), the mining sequence was not taken into
account, so the wall convergence due to elastic straining of the rock mass was imposed on the fill. This
created an increase of the mean stress in the fill, while
vertical and horizontal stresses locally exceeded the
overburden pressure and the Marston theory solution
(near mid-height of the stope).
Modeling in this manner implies that the backfill is
placed in the stope before wall displacement takes
place. For a single excavation stope, this is not a realistic representation (at least for hard rock masses).
However, with a cut-and-fill mining method where the
mining slices (or layers) are relatively small compared
to the whole height of the stope, filling is usually
made quickly after each cut. In this case, wall convergence after each cut compress the fill already in place
(Knutsson 1981, Hustrulid et al. 1989). The inward
movement of the walls may then create a condition
closer to the passive pressure case.
When a stope is excavated in a single step, wall convergence essentially takes place before any backfilling.
If the rock mass creep deformation is negligible,
the numerical modeling approach presented here is
more appropriate. In this case, the Marston theory,
with the “at rest” reaction coefficient (K K0) can be
used to estimate the induced stresses in a narrow vertical backfill (see Figs. 5–7), at least for preliminary
design calculations.
overburden
4.2
yy (MPa)
Marston theory
0.2
K=3
K = 1/2
K = 1/3
0
0
(b)
9
18
27
36
45
h (m)
Figure 9. Comparison between stresses obtained with
numerical and analytical solutions along the central line of the
inclined stope: (a) horizontal stress xx; (b) vertical stress yy.
216
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
Marston theory limitations
Analytical solutions can be useful engineering tools as
they are generally quick, direct and economic when
compared to numerical methods. However, analytical
solutions are only available for relatively simple situations and may involve strong simplifying hypotheses.
For instance, with the Marston theory, the shear stress
along the interface between the rock and fill is deduced
from the Coulomb criterion (see details in Aubertin
et al. 2003). Its value then corresponds to the maximum stress sustained by the fill material, as postulated
in the limit analysis approach (e.g. Chen & Liu 1990).
However, numerical simulations indicate that this
assumption is not fully applicable. Figure 10 shows
that for the vertical stope analyzed here the maximum
shear stress is only reached near the bottom part of the
09069-26.qxd 08/11/2003 20:33 PM Page 217
modeling with FLAC-2D
0.04
0.5
at rest
Marston theory
K
0.02
h (m)
σxy (MPa)
0
0
-0.02
9
18
27
36
0.3
45
-0.04
-0.06
0
2
x (m)
4
6
K = 1/2
-0.08
Figure 10. Comparison of shear stress distribution along
the wall.
0.12
xx (MPa)
modeling with FLAC
0.1
K = 1/3
K=3
active
at floor
at 1/2H
at 1/2H
at 3/4H
uniformly distributed across the full width of the stope.
Results shown in Figure 11 indicate that this is in accordance with numerical calculations for the horizontal
stress component (Fig. 11a), but not for the vertical
stress which shows a less uniform distribution (Fig.
11b). Also, this simplified theory considers that the
reaction coefficient, K, depends exclusively on the fill
property and not on the position in the stope. Results
shown in Figure 12 indicate that this hypothesis is not
too far from the numerical results. Near the boundary,
the value of K would nevertheless be better described by
a K value between Ka and K0.
Work is underway to modify the analytical solution
to extend the use of the Marston theory to more
general cases.
at 3/4H
0.1
at 1/2H
at 1/4H
0.08
0.06
modeling with FLAC-2D
0.04
0
2
4
6
x (m)
(a)
Figure 12. Reaction coefficient K obtained with analytical
and numerical solutions across the full width of the vertical
stope at different elevations h.
at 3/4H
0.3
4.3 Constitutive behavior
yy (MPa)
at 1/2H
0.2
at 1/4H
0.1
modeling with FLAC-2D
0
(b)
0
2
x (m)
4
6
Figure 11. Distribution of (a) lateral pressure xx and (b)
vertical stress yy obtained with FLAC across the full width
at different elevations of the vertical stope.
stope. Hence, arching effect and stress redistribution
are thus exaggerated.
Another important assumption in the Marston theory
is that both the horizontal and vertical stresses are
The reliability of any numerical calculations depends,
to a large extent, on the representativity of the constitutive models used for the different materials (and on the
corresponding parameter values). In this paper, a
Coulomb plasticity model (see Fig. 3) was employed
for the fill material. This model is representative of
some aspects of the mechanical behavior of backfill,
such as the nonlinear relationship between the stress
and strain (e.g. Belem et al. 2000, 2002). However, this
simplified model neglects some important characteristics of the media, including its pressure dependent
behavior under relatively large mean stresses. More representative models, such as the modified Cam-Clay
model, are built in FLAC (e.g. Detournay & Hart,
1999). However, the application of such model is not
straightforward because of the difficulties in obtaining
the relevant material parameters. The influence of cohesion due to cementation and possible oxidation of the
fill material may also be relevant to include in the
analyses.
217
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-26.qxd 08/11/2003 20:33 PM Page 218
An interesting aspect of FLAC is that it allows userdefined models, which can be introduced with the
language FISH. The authors are now working on introducing in FLAC a multiaxial, porosity dependent criterion (Aubertin et al. 2000, Li & Aubertin 2003) for the
yielding and failure conditions of geomaterials. This
aspect will be presented in upcoming publications.
4.4
ACKNOWLEDGEMENT
Part of this work has been financed through grants
from IRSST and from an NSERC Industrial Chair
(http://www.polymtl.ca/enviro-geremi/). The authors
would also like to thank the anonymous reviewers
who provided valuable comments to improve the
manuscript.
Interface elements along the walls
As was done with a finite element code in a previous
investigation (Aubertin et al. 2003), some calculations
were also performed with interfaces included in FLAC,
to represent the contact between backfill and rock mass.
Preliminary results (not shown here) indicate that the
presence of interfaces along the walls and floor of the
stope, which allow localized shear displacements, has
relatively little influence on the stress distribution in the
stope and at its boundary. Some differences between the
cases shown here and models with interfaces nevertheless appear near the bottom and top of the stope where
some stress reorientation and concentration seem to
take place. This aspect however requires further investigation. The applicability of the (Coulomb) strength criterion and the numerical stability of the calculations
along these elements also need more study.
5 CONCLUSION
In this paper, numerical simulations have been performed with FLAC for a vertical and an inclined backfilled stope geometry. The results are compared to the
Marston theory solutions. It is shown that the results
obtained with the Marston theory can be considered as
acceptable, especially for preliminary calculations.
Nevertheless, the numerical results also reveal that the
Marston theory tends to overestimate arching effect,
and thus underestimate the stress magnitude near the
bottom of backfilled stope. Also, the influence of the
mining sequence can not be introduced in the Marston
theory. The numerical results indicate that the filling
sequence can significantly influence the stress distribution in and around filled stopes. For inclined stopes,
the Marston theory is of limited use to estimate the
stress magnitude. Additional work is underway into
both analytical and numerical solutions to better
describe the behavior of backfilled stope. More work
is also needed to study the rock-fill interface behavior
and the actual field response of backfill in stopes.
Other important issues also remain to be resolved,
including the possible degradation of the arch due to
low pressure (and tensile stresses), the influence of
water flow and distribution in backfilled stopes, the
evolving properties of the fill material (particularly
considering the action of cement in the presence of
sulfide minerals), the dynamic response of the backfill, and the forces generated on retaining structures.
REFERENCES
Aubertin, M. 1999. Application de la Mécanique des Sols
pour l’Analyse du Comportement des Remblais Miniers
Souterrains. Short Course (unpublished notes), 14e
Colloque en Contrôle de Terrain, Val-d Or, 23–24 mars
1999. Association Minière du Québec.
Aubertin, M., Bussière, B. & Bernier, L. 2002. Environnement
et Gestion des Rejets Miniers. Manual on CD-ROM,
Presses Internationales Polytechniques.
Aubertin, M., Li, L., Arnoldi, S., Belem, T., Bussière, B.,
Benzaazoua, M. & Simon, R. 2003. Interaction between
backfill and rock mass in narrow stopes. In P.J. Culligan,
H.H. Einstein & A.J. Whittle (eds), Soil and Rock America
2003, 1: 1157–1164. Essen: Verlag Glückauf Essen (VGE).
Aubertin, M., Li, L. & Simon, R. 2000. A multiaxial stress
criterion for short term and long term strength of isotropic
rock media. International Journal of Rock Mechanics and
Mining Sciences, 37: 1169–1193.
Belem, T., Benzaazoua, M. & Bussière, B. 2000. Mechanical
behavior of cemented paste backfill. Proceedings of the
55th Canadian Geotechnical Conference, 1: 373–380.
Canadian Geotechnical Society.
Belem, T., Benzaazoua, M., Bussière, B. & Dagenais, A.M.
2002. Effects of settlement and drainage on strength development within mine paste backfill. Tailings and Mine
Waste ’02: 139–148. Swets & Zeitlinger.
Blight, G.E. 1986. Pressure exerted by materials stored in
silos. Part I: coarse materials. Géotechnique, 36(1): 33–46.
Bjerrum, L. 1972. Embankments on Soft Ground. Proceedings of the ASCE Specialty Conference on Performance
of Earth and Earth Supported Structures, 2: 1–54. New
York: ASCE.
Bowles, J.E. 1988. Foundation Analysis and Design. McGrawHill.
Chen, W.F. & Liu, X.L. 1990. Limit Analysis in Soil Mechanics. Amsterdam: Elsevier.
Cowin, S.C. 1977. The theory of static loads in bins. Journal
of Applied Mechanics, 44: 409–412.
Detournay, C. & Hart, R. (eds) 1999. FLAC and Numerical
Modeling in Geomechanics – Proceedings of the International FLAC Symposium, Minneapolis, Minnesota, 1–3
September 1999. Rotterdam: Balkema.
Hassani, F. & Archibald, J.H. 1998. Mine Backfill. CIM,
CD-ROM.
Hunt, R.E. 1986. Geotechnical Engineering Analysis and
Evaluation. New York: McGraw-Hill Book Company.
Hustrulid, W., Qianyuan Y. & Krauland, N. 1989. Modeling of
cut-and-fill mining systems – Näsliden revisited. In F.P.
Hassani, M.J. Scoble & T.R. Yu (eds), Innovation in Mining
Backfill Technology: 147–164. Rotterdam: Balkema.
218
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-26.qxd 08/11/2003 20:33 PM Page 219
Itasca Consulting Group, Inc. 2002. FLAC – Fast Lagrangian
Analysis of Continua, User’s Guide. Minneapolis, MN:
Itasca.
Jaky, J. 1948. Pressure in silos. Proceedings of the 2nd International Conference on Soil Mechanics and Foundation
Engineering, 1: 103–107. Rotterdam: Balkema.
Janssen, H.A. 1895. Versuche über Getreidedruck in
Silozellen. Zeitschrift Verein Ingenieure, 39: 1045–1049.
Knutsson, S. 1981. Stresses in the hydraulic backfill from
analytical calculations and in-situ measurements. In O.
Stephansson & M.J. Jones (eds), Proceedings of the
Conference on the Application of Rock Mechanics to Cut
and Fill Mining: 261–268. Institution of Mining and
Metallurgy.
Li, L. & Aubertin, M. 2003. A general relationship between
porosity and uniaxial strength of engineering materials.
Canadian Journal of Civil Engineering (in press).
Marston, A. 1930. The theory of external loads on closed
conduits in the light of latest experiments. Bulletin No. 96,
Iowa Engineering Experiment Station, Ames, Iowa.
McCarthy, D.F. 1988. Essentials of Soil Mechanics and
Foundations: Basic Geotechnics. 4th edition, Prentice Hall.
Nantel, J.H. 1983. A review of the backfill practices in the
mines of the Noranda Group. In S. Granholm (ed), Mining
with Backfill: Proceedings of the International Symposium
on Mining with Backfill: 173–178. Rotterdam: Balkema.
Ouellet, J. & Servant, S. 2000. In-situ mechanical characterization of a paste backfill with a self-boring pressuremeter.
CIM Bulletin, 93(1042): 110–115.
Richards, J.C. 1966. The Storage and Recovery of Particulate
Solids. Institution of Chemical Engineers, London.
Spangler, M.G. & Handy, R.L. (1984). Soil Engineering.
Harper & Row.
Take, W.A. & Valsangkar, A.J. (2001). Earth pressures on
unyielding retaining walls of narrow backfill width.
Canadian Geotechnical Journal, 38: 1220–1230.
Terzaghi, K. 1943. Theoretical Soil Mechanics. John Wiley &
Sons.
Udd, J.E. 1989. Backfill research in Canadian mines. In F.P.
Hassani, M.J. Scoble & T.R. Yu (eds), Innovation in Mining
Backfill Technology: 3–13. Rotterdam: Balkema.
219
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-27.qxd
8/26/03
10:44 AM
Page 221
FLAC and Numerical Modeling in Geomechanics, Brummer et al. (eds)
© 2003 Swets & Zeitlinger, Lisse, ISBN 90 5809 581 9
FLAC3D numerical simulations of deep mining at Laronde Mine
C.P. O’Connor, R.K. Brummer & P.P. Andrieux
Itasca Consulting Canada Inc., Sudbury, Ontario, Canada
R. Emond & B. McLaughlin
Agnico-Eagle Mines – Laronde Mine, Cadillac, Quebec, Canada
ABSTRACT: Agnico-Eagle’s Laronde Mine is currently investigating mining options down to 3000 meters
below surface. FLAC3D was used to simulate the entire current mine from 1340 m to 2150 m below surface as
well as the potential future expansion. FLAC3D allowed each of the three main ore lenses to be modeled together,
providing information on the interaction between lenses which had never been available before. The model provides
information useful for determining the ideal stope dimensions, mining method, mining sequence, support options
for large excavations, as well as the best option for the shaft location.
be encountered when placing infrastructure at
depth.
1 INTRODUCTION
Agnico Eagle’s Laronde Mine is a 7000 tpd underground operation located in Northern Quebec in the
Abitibi Mining district near Rouyn-Noranda. Drilling
from the bottom levels of the current mine have shown
that there are significant reserves down to at least
3000 m below surface. Most of the tonnage has historically come from above the 152 Level but with a shift
currently taking place to turn the 215 Level into the
major source of ore as the upper levels are progressively
becoming depleted.
As part of the feasibility into the potential expansion
down to 3000 m, a geomechanical review of the proposed expansion was conducted using FLAC and
FLAC3D as numerical modeling tools to determine the
anticipated response to mining at extreme depths.
FLAC3D was used in several forms. First, it was used
to model the entire mine from the top of the current
mining horizon down to a depth of 3000 m. From this
model, the in-situ and post-mining stresses were traced
along with an analysis of the interaction between the
different ore lenses in the upper levels. The second
model was a high resolution mining method model used
to determine the stresses and failure zones for different
sized stopes and different ore thicknesses at extreme
depths.
FLAC was used in order to check shaft stresses
at depth including post-mining stress changes.
FLAC was also used to model the stresses around
a hypothetical large excavation (conveyor drift)
in order to investigate some of the issues that could
2 MINE GEOMETRY
Laronde Mine is located in the Abitibi Mining district in
northern Quebec. The orebody is a gold-zinc deposit
that is part of an extensive intrusive complex that runs
throughout the region. The 20-North deposit, which is
the major producer, runs from a depth of 900 m down to
at least 3000 m but currently mining is only taking place
down to 2150 m. The orebody is steeply dipping to the
South and raking towards the West.
The current mining method used is primarysecondary stoping with high quality backfill (mainly
pastefill). This method has been used since the mining
of 20-North began and has proved to be successful in
maintaining good stability in the hangingwall and minimizing stress related problems.
Secondary stopes are designed to fail with the
extraction of primary stopes, which results in a relatively low stress environment in which to mine (the secondary stopes are not large enough to carry significant
stresses in post failure). Current stopes are 15 m along
strike, 30 m high and the thickness of the orebody.
With a few exceptions, this system has produced relatively trouble free mining at the current depths.
The progression to greater depths however will result
in greater stresses and more extensive failure zones that
will cause greater difficulties than have been experienced to-date.
221
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-27.qxd
8/26/03
10:44 AM
Page 222
Figure 1. Cross-section looking East of the Laronde orebody showing the different rock units included in the modeling.
180 MPa. The orebody itself is competent, also with a
UCS of 180 MPa. Both of these values come from
CANMET test results (Labrie 2000a).
The stresses at Laronde were measured by
CANMET on the 146 level and the 150 level (Labrie
2000b). The stress gradients are shown in Figure 2.
CANMET Stress Model Used to Obtain
Gradients for Flac 3D Model
0
S3 = 0.027 * Depth
200
S2 = 0.0362 * Depth
400
S1 = 0.0437 * Depth
3.1
Depth (m)
600
800
The overall mine model was used for a number of purposes. First, it was used as a calibration of the stress
and material properties based upon information collected from site visits and previous experience at the
mine. Secondly, it was used to determine how much of
an interaction between ore zones was likely taking
place. Finally, it was used to determine the in-situ
and post-mining stresses along the potential shaft locations and the overall stress regime throughout the
entire mine.
CANMET @ 150
S1 Average = 70.2
S2 Average = 61.18
S3 Average = 47.61
1000
CANMET @ 146
S1 Average = 59.31
S2 Average = 48.13
S3 Average = 25.08
1200
1400
1600
0
20
40
60
80
100
Stress (Mpa)
CANMET S1
CANMET S2
CANMET S3
Stress Gradient (S1)
Stress Gradient (S2)
Stress Gradient (S3)
Figure 2. Stress gradients used in the FLAC modeling at
Laronde Mine based upon CANMET stress measurements.
3 FLAC3D MODELING
The use of FLAC3D in this project was a logical choice
based on the geometry of the orebody and work previously performed by Itasca for the mine (a reasonably
good calibration of the model, material properties, and
stresses had already been performed). To extend upon
this base information, new stress data and core testing
by CANMET resulted in a more refined picture of the
complex interactions between the different rock structures and stresses.
Around each ore lens is a layer of highly sheared
schist that varies in thickness up to 5 m on both the
hangingwall and footwall. Surrounding the schist is a
garnetiferous tuff material that is relatively strong and
stiff with a uniaxial compressive strength (UCS) of
3.1.1 Calibration
The calibration of the material properties became easier
to perform after a seismic event occurred on the 152
Level of the mine. Using the existing model as a framework, an investigation showed – and the model confirmed – that there was a large stress concentration
centered right around the location of the burst caused
by a 3-wide pillar being formed by retreating stopes
towards the central access for the level.
In March 2003, a large fall of ground occurred in a
stope on the 215 Level where a double width stope
had been taken. Again, the model was able to show a
similar pattern in the stresses and failure zones in this
area. Between these two events, a comfortable degree
of confidence was gained that the model reflects realistic stresses and failure zones based upon the known
geology and geometry of the orebody at depth.
3.1.2 Ore lens interactions
In all of the previous work performed, the investigation
of the impact of the different ore lenses on each other
was not considered relevant because of the distance
222
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
Overall mine model
09069-27.qxd
8/26/03
10:44 AM
Page 223
location for the shaft, a series of history points were
taken along the length of five potential locations. Each
shaft location represented a suitable surface location at
which a shaft could be placed within the existing limits
of the property.
Tracking of the major and minor principal stresses
along the length of each possible shaft location, a comparison between these locations became possible
through the use of the stress ratio (SR). The SR (shown
in Fig. 4) is calculated based upon the anticipated point
at which damage will occur in an ideal circular opening
and is defined as:
(1)
Figure 3. Surface contour plot generated by Surfer( on the
215 Level in the final year of the five-year plan. The upper
right region is Zone 7, the middle is the main Zone 20, and the
lower region shows Zone 21.
Stress Ratio Versus Depth
1400
1600
Depth (m)
1800
2000
2200
Heavy Damage
2400
2600
Little to no Damage
Moderate Damage
2800
3000
0
0.2
Shaft #1
0.4
Shaft #2
0.6
Shaft #3
0.8
1
1.2
Stress Ratio
Shaft #4&6
Shaft#5
1.4
1.6
1.8
The stress ratio plots and an analysis of the maximum and minimum stresses showed that there was no
single shaft location that stood out as being significantly better or worse than any other – rather it appeared
that all of the shafts were likely going to experience
similar stress levels with some variation in the timing
and location of peak stresses depending on their proximity to the orebody.
Based upon several factors, shaft location #3 was
proposed as the best. It was located near the centroid of
the orebody at depth, which will reduce haulage distances, and had the benefit of enjoying some level of
stress shadowing from the orebody at the deepest levels.
The geology of the shaft location was unknown at the
time, as drilling had focused on delineating the orebody
and not so much on investigating the footwall materials.
Future drilling of this region could change the ideal
location to avoid adverse geology.
In Situ Stress Ratio
Figure 4. Stress ratio plot for all shaft locations based upon
FLAC3D results.
between the mining fronts. As part of this project, it was
decided to include the multiple ore lenses in order to
determine just how small or large an interaction was
likely to occur between these zones.
From the model, it appeared that there is an interaction between the different ore zones as mining progresses into the future. Figure 3 shows a surface contour
plot on the 215 Level with all three lenses being mined
to the end of the five-year plan (as of November 2002).
The mined out stopes show up as depressions while
the abutment stresses appear as peaks in this perspective view of a surface plot. There is a definite bridging
effect between the middle and upper zone abutment
areas (shown as the raised region), as well as some
stress shadowing occurring between the middle and
lower zones (shown as a depression).
3.1.3 Shaft stresses
The location of the shaft was one of the most important
aspects of the project. In order to determine the best
3.1.4 Overall mine stresses
The final purpose of the overall mine model was to
examine the overall mine stresses over the entire life
of the mine. In order to make a model that could be
run within a reasonable amount of time, the resolution in the upper regions was reduced to allow for a
higher resolution in the 2150 to 3000 m depth region.
The mine stress model showed a number of interesting things. Firstly, the failure zones around a fully
formed mining front are quite extensive depending on
the ore thickness, and can even be greater than an entire
stope width into the abutment. (see Fig. 5.) Stresses in
the abutments and sill regions can exceed 250 MPa (as
seen in Fig. 6). Also, even in failed ground very high
stresses can be seen due to heavy confinement levels
that will likely cause some significant issues in areas
such as sills in which post-failure ground is subjected to
very high stresses.
3.2
In order to take a closer look at the stope level stresses,
another model was built with the sole purpose of running high resolution simulations at the maximum depth
223
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
High resolution mining method analysis
09069-27.qxd
8/26/03
10:44 AM
Page 224
Figure 5. Failure plot on a long section looking North of the overall mine model as mining approaches a sill. Blue blocks are
intact, red and light blue blocks have failed in shear and green blocks also have a tensile failure component.
Figure 6. Maximum principal stress plot on a long section looking North through the orebody. Peak stresses in a couple of
areas exceed 250 MPa.
of the mine. The model used a simplified representation
of the orebody to give a constant strike and thickness of
the ore and schist zones to eliminate geometrical effects
in the comparison. A total of four simulations were run,
three with different ore thicknesses ranging from 10 m
up to 30 m, and a fourth simulation in which the stope
size was reduced to determine the impact on the stope
stability.
To simplify the running of multiple scenarios with
similar geometry, a FISH function was written in which
the thicknesses of the different units and their location
in the model could be defined, as well as the depth at
which the simulation was to occur. This automation
reduced the turnaround time between model runs to
only a few minutes.
3.2.1 Results
Some results from the different ore thicknesses
are shown below, in each case, the early stages of
mining are shown when only four stopes have been
224
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-27.qxd
8/26/03
10:44 AM
Page 225
Figure 7. Maximum principal stress plot on a long section looking North through the orebody with a 10 meter ore thick-ness
showing some pinching of high stresses above the trailing primary stopes. Secondary stopes are in post-failure even in narrow ore.
Figure 8. Maximum principal stress plot on a long section looking North through the orebody with a 30 meter ore thickness
showing that the destressed zone is much larger due to the extra freedom provided by the larger stoping spans. Overall, the
stresses are more spread out and peak stresses are predicted to be much lower in this case.
mined.A 10 m and 30 m ore thickness are shown for
comparison.
Looking at the principal stress plots it can be
seen that there is a definite pinching of the stresses
with the narrower ore geometry Fig. 7) due to the
stronger secondary stopes carrying more loading
and the smaller failure zones. In contrast, the 30 m
ore zones (Fig. 8) result in a very large and smooth
stress distribution with lower peak stress levels.
This pattern of pinched stresses and higher peak
225
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-27.qxd
8/26/03
10:44 AM
Page 226
Figure 9. Cross-section looking North showing failed regions in the model with 10 meter ore thickness. The impact of individual stopes can be seen by the irregular shape of the failure zone. Most of the blocks are failed in shear (light blue and red
blocks, although some tensile failure is evident along the stope boundaries (green blocks).
Figure 10. Cross-section looking North showing failed regions in the model with a 30 meter ore thickness. The failure region
is much larger and more even with the wider ore at these great depths. The color coding is the same as in Figure 9.
levels continued throughout the simulation as mining
proceeds.
Looking at the failure plots (Figs. 9 & 10) the reason for the pinching of the stresses from the previous plots (Figs. 7 & 8) can be seen. The failure
zones are much larger with the thicker orebody; this creates a more even shell of failure around
the stopes which becomes spherical in shape. The
impact of a single stope is lost in the overall picture.
In the narrower orebody, the impact of individual
stopes on the overall shape of the failure zone is still
apparent.
From these results it can seen that there is a significant impact on the stresses and failure zones with
increasing ore thickness as would be expected with the
change in the pillar width-to-height ratio.
226
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-27.qxd
8/26/03
10:45 AM
Page 227
Figure 11. Grid used in the FLAC modeling of a 9 meter diameter shaft with liner support.
Figure 12. Maximum principal stress plot around a 9 meter diameter shaft at a depth of 2000 meters.
4
FLAC MODELS
Two other models were created in FLAC in order to give
some measure to the stresses and anticipated failure
zones around excavations at extreme depths. The first
model was used to model the shaft in both in-situ and
post-mining situations, whereas the second was used to
model a hypothetical large excavation at 3000 m
(9840 ft).
4.1
Shaft model
The shaft model created in FLAC used the double donut
FISH function provided with FLAC, which was modi-
fied to provide a single circular opening with a liner
component added. The advantage of using this scheme
is that it allows for the modeling of both in-situ and postmining stresses in the same model, by adding the rotation to the stress tensor and observing the effects. Figure
11 shows the FLAC grid used for the shaft modeling.
The liner was set up as a 12 inch concrete layer,
which was added after the in-situ stresses had reached
equilibrium in order to properly mimic the true
response of the liner. The liner was assumed to respond
only to post-mining stresses. The maximum principal
stress was set to run North–South. The in-situ stresses
and failure zones the shaft at a depth of 2000 meters are
shown in Figures 12 & 13 respectively.
227
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-27.qxd
8/26/03
10:45 AM
Page 228
Figure 13. Predicted failure envelope around a 9 meter diameter shaft at 2000 meters subjected to in-situ stresses. The depth
of failure predicted from this model is around 3 m.
Figure 14. Maximum principal stress plot at shaft location #3 at a depth of 2100 meters when subjected to mining induced
stress changes.
In order to determine the stresses around a large
selection of shaft locations and depth/stress conditions, the stress ratio plot (see Fig. 4) was used to
determine the best and worst conditions that may be
expected from each shaft location. Six shaft models
were run – this included three generic in-situ runs at
2000, 2500, and 3000 m. Another set of three models
were used to represent post-mining conditions where
the largest increases, decreases and rotations of the
stress tensor were occurring.
Figure 14 shows an example of the #3 shaft location at a depth of 2100 m (which corresponds to the
largest increase in stress ratio). It can seen that the
stresses have rotated clockwise about 45 degrees,
which is shown in both the stress plot and the plasticity plot (Fig. 15). These results correspond very well
with what was intuitively expected based on the
geometry of the region. At this elevation, the shaft is
just passing through the western abutment stress of
the 215 mining horizon, which is reflected by the
228
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-27.qxd
8/26/03
10:45 AM
Page 229
Figure 15. plot for shaft location #3 at a depth of 2100 m at the post-mining stage. The rotation of the stresses at this location
has had a significant impact on the failure zones with an increased depth of failure along a line running North-West to South-East.
Figure 16. Stresses in the 12 inch concrete liner for post-mining stresses of shaft #3 at 2100 m. Peak stresses approach 4 MPa
in the liner in this case.
slight increase in stresses and the general rotation of
the stress tensor.
Looking at the stresses in the liner (see Fig. 16),
it can be seen that the stresses in the liner due to
mining-induced stress are quite small with a peak stress
of around only 4 MPa, which is well below the strength
of the concrete to be used in the liner. From this analysis it was determined that there should be no excessive
stresses or failure zones that cannot be designed for
with current technology. Barring any poor geological
horizons through the shaft locations, no significant
difficulties are anticipated beyond those expected
with mining at extreme depth.
4.2
The large excavation model provided some general
guidelines that can be used in the design of infrastructure in the mine. To do this, an arched back drift was
created in FLAC with a span of 11 m and a height of
6.5 m, as shown in Figure 17. The drift was set up at a
3000 meter depth using the in-situ stress. Post-mining
229
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
Generic large excavation model
09069-27.qxd
8/26/03
10:45 AM
Page 230
Figure 17. Grid used to create the large excavation model.
Figure 18. Large excavation running parallel to the maximum principal stress. Peak stresses approach 200 MPa with a failure
zone that extends around 5 m into the back of the drift.
stresses were not considered since they are locationdependant and no information was available for placement of infrastructure in the deep mine. The first run of
the model assumed that the drift ran parallel to the
maximum principal stress (North–South), while the
second model ran perpendicular to the maximum principal stress (East–West) in order to provide information on these two extreme situations.
With the drift set up to run parallel to 1, the back is
shielded from the effect of the highest stresses. As a
result, the stress seen in the drift was a combination of
2 and the overburden-related vertical stress. This
resulted in a peak stress of around 200 MPa and a failure zone that extended up to 5 meters into the back
(Fig. 18). This represented a very extensive shell of
failed material, which, depending on geology, could be
difficult to support. The ground at Laronde tends to
involve some significant displacements which make
stiff support such as shotcrete a less attractive support
system as it cannot accommodate much displacement.
With the alternative scenario, which had the drift
running perpendicular to 1, the drift was exposed to
the full impact of the highest stress component (see Fig.
19). As a result, the peak stresses across the back of the
230
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-27.qxd
8/26/03
10:45 AM
Page 231
Figure 19. Large excavation running perpendicular to the maximum principal stresses. In this case the peak stresses are about
25% higher and the failure zone extends nearly 6 m into the back.
stope reached 250 MPa (which is about 25% higher
than the previous case). The failure zones extend about
15% farther into the back that in the previous case,
making for an even more difficult ground support
requirement.
were encountered. These problems will be magnified
at depth.
ACKNOWLEDGEMENTS
The authors thank Agnico Eagle Mines for permission
to publish this paper.
5 CONCLUSIONS
The numerical modeling exercise using FLAC and
FLAC3D enabled the known behavior of the mine in
shallower areas to be extended to the planned deeper
mining. With the knowledge thus gained, it is possible
to estimate with some degree of confidence some of the
issues that may come into play at the extreme depths
involved in this mine expansion.
Based upon experience gained in the upper levels of
the mine, several important recommendations were
made. Among other things, the mining sequence is critical to the stability of the mine at these depths. In
instances in upper levels where deviations from the
original plan created unfavorable geometry, problems
REFERENCES
Labrie, D. December 2000a. Strength and Elastic Modulus as
Determined on the Drill Core HQ5 at #3 Shaft – AgnicoEagle Mines, Laronde Division, Cadillac, Quebec. (In
French.), Technical Note from Laboratoires des mines et
des sciences minérales, CANMET to Agnico Eagle
Laronde Mine. Nepean, Ontario, Canada.
Labrie, D. December 2000b. Laronde Mine (Project 610 660,
Task B) – Evolution of the Stress Field as a Function of the
Number of Mathematical Iterations Executed. (In French.),
Technical Note from Laboratoires des mines et des sciences
minérales, CANMET to Agnico Eagle Laronde Mine.
Nepean, Ontario, Canada.
231
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-28.qxd 08/11/2003 20:36 PM Page 233
FLAC and Numerical Modeling in Geomechanics, Brummer et al. (eds)
© 2003 Swets & Zeitlinger, Lisse, ISBN 90 5809 581 9
Three-dimensional strain softening modeling of deep longwall
coal mine layouts
S. Badr, U. Ozbay, S. Kieffer & M. Salamon
Colorado School of Mines, Golden, Colorado, USA
ABSTRACT: This paper describes a FLAC3D model for a typical deep two-entry longwall coal mine. The coal
seam is modeled as a strain softening material to attain a representative analysis of stresses and deformations
experienced by the coal ribs and yielding chain pillars corresponding to various loading stages. The strain softening parameters are established by calibrating separate test pillar models to common empirical pillar strength
formulas. The test pillar models showed that strain softening material behavior results in lower pillar strengths
than the traditional Mohr–Coulomb models based on constant peak cohesion and friction values. The longwall
model incorporates compaction simulations of the gob material in the back area. Two algorithms for representing
gob compaction are described.
1 INTRODUCTION
(4)
Co
Coal
(1
(1)
(
(2)
(
(5)
Gob
(3)
Figure 1. Simplified plan view of a two-entry longwall
mine layout showing pillar loading stages.
right to left as indicated, the chain pillars undergo five
stages of loading. These stages are indicated in the
diagram; the first three affect the pillars next to the head
gate and the last two affect the pillars next to the tailgate. Stage 1 corresponds to the situation where the
entry-pillar system is fully developed, but the extraction of the longwall panels has not yet affected the loading of the pillar. Stage 2 refers to the situation where the
front and side abutments contribute to the pillar loading
due to the approaching longwall face.
In Stage 3, the gob on one side, and an unmined
panel on the opposing side, affect the loading. The gob
in the vicinity of the development is not fully compacted so it does not support the full weight of the
233
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
advance
adv
In mining practices, it is common for the induced loading to exceed the strength of the rock mass. Realistic
representation of stresses and deformations in such
situations requires use of constitutive laws that can
account for the response of the rock mass in the postpeak state. Mohr–Coulomb (MC) and Hoek & Brown
(HB) plasticity models are commonly used in these
situations. Considering the brittle nature of many rock
masses, strain softening type models, such as the
Mohr–Coulomb Strain Softening (MCSS) option in
FLAC3D (Itasca 2002), allow more realistic modeling
of rock mass failure.
A typical mining situation where the modeling of
brittle behavior becomes important is the analysis of
yielding chain pillars in deep longwall mines. At depths
more than about 300 m, the vertical stress exceeds
the strength of unconfined coal, resulting in failure of
the excavation walls while they are being exposed.
This can result in the sides of entry pillars failing before
the pillars are fully isolated. Realistic estimation of the
loads carried by these pillars during subsequent mining
requires the use of a softening model.
The longwall mining geometry and the sequence
of excavation considered in this study are illustrated in
a plan view in Figure 1. Three longwall panels are
shown in this illustration. The upper panel is already
extracted. The panel at the bottom of the illustration has
been developed, but extraction has not yet commenced.
As the longwall face in the middle panel moves from
09069-28.qxd 08/11/2003 20:36 PM Page 234
overburden. In Stage 4 on the tailgate side, as the face
approaches, the front abutment increasingly contributes
to loading of the pillar; hence the conditions around
the tailgate pillars become progressively more adverse.
Stage 5 corresponds to the situation where the influence
of the face is no longer detectable and the chain pillars
are surrounded on both sides by gobs.
This paper describes a numerical model for assessing the longwall mining scenario described above. The
coal seam is modeled as a MCSS material. A separate
series of numerical analyses was carried out on a single pillar (test pillar model) to determine representative MCSS strength parameters for the coal seam. The
test pillar model analysis was also performed with
MC materials to permit comparison of the pillar
res-ponse based on MC and MCSS behavior.
Compaction of the fractured, particulate material,
called the “gob”, created by the caving of the roof in the
area from where the coal has been extracted, requires
attention in the numerical modeling of longwall mining.
With continuing extraction, the upper strata and the
floor converge and gradually the vertical load on the
gob material increases. Representation of this process
requires consideration of the deformations of both the
gob materials and the surrounding strata. This paper
describes two alternative algorithms to simulate gob
compaction.
240 m
1000 m
240 m
Figure 2. The FLAC3D block model developed for longwall
mining simulations.
2 LONGWALL MODEL
The modeled longwall layout is similar to that shown in
Figure 1. It represents a two-entry longwall mine located
at a depth of 680 m below surface. The panel length is
220 m and the mining height is 3 m. The width of the
entries and cross cut is 6.5 m. The chain pillars between
the entries are 3 m high, 8 m wide and 26 m long.
The mining geometry is built in a 1000 m long,
240 m high, and 240 m wide block with graded mesh,
as shown in Figure 2. The bottom layer in this figure
represents half of the 3 m thick coal seam. The meshing
at the central portion of the base of the block is made
finer in order to represent the entries and chain pillars
in detail (Fig. 3). Within the fine meshed region, MC
interface separates the coal seam from the roof strata.
The roof and floor strata are assumed to remain elastic
throughout all stages of mining. The vertical planes
bounding the block are free of shear stresses and horizontal displacement. The horizontal plane at the base
of the model, which is a plane of symmetry, is also
free of shear stresses and subject to zero vertical displacement. The model is loaded at the top with a uniform vertical stress of 11 MPa to give a total overburden
pressure of 17 MPa at the coal seam level. As seen in
Figure 4, the element size in the chain pillars within
the fine meshed central region is 1 m 3 m 0.5 m
in the x, y and z-directions, respectively.
Figure 3. Bottom view of the FLAC3D block model showing
the fine mesh at the central area.
8m
26 m
6.5 m
Figure 4. The entry system dimensions.
2.1
Determination of material properties
In addition to the peak cohesion, friction angle, and
dilation angle in the MC model, the MCSS model
also requires parameters describing the rate of cohesion
234
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
6.5 m
1.5 m
09069-28.qxd 08/11/2003 20:36 PM Page 235
Loading
30
25
3.25 m
Peak strength (MPa)
Cross-cut
2.5
2.4
2.2
2
1.8
1.6
1.5
Salamon
Bieniawski
0.5 m
Coal
Entry
6m
20
35 MPa/εp
15
10
5
0
1
0
3
2
5
4
w/h
30
2.5
2.4
2.2
2
1.8
1.6
1.5
Salamon
Bieniawski
25
15
10
0
0
1
2
4
3
5
w/h
30
2.5
2.4
2.2
2
1.8
1.6
1.5
Salamon
Bieniawski
25
20
15
100 MPa/εp
10
5
0
0
1
3
2
4
5
w/h
Figure 6. Model pillar strength versus empirical pillar
strength at cohesion drop rates of 35,50,100 MPa/p
(Strength formulas: Salamon: 9(w0.46/h0.66), Bieniawski:
9(0.64 0.36 w/h) in MPa; assuming a coal cubic strength
value of 9 MPa).
of 2.2 MPa and cohesion drop rate of 50 MPa/p is
considered suitable for modeling yielding of the
chain pillars.
The test pillar models were repeated using the MC
failure criterion with the same peak cohesion, friction
235
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
20
5
Peak strength (MPa)
and/or friction drop as a function of plastic strain
in the post-peak region. The determination of the MC
and MCSS parameters for a rock mass is a difficult
task, but can be carried out empirically by performing
back-analyses. In this study, the parameter determination is based on the two most commonly used empirical
pillar strength formulas given by Salamon (1967) and
Bieniawski (1984).
A FLAC3D model of a single test pillar was developed
to establish the most suitable combination of coal
MCSS parameters for replicating pillar strength values based on empirical formulas. Figure 5 shows the
FLAC3D model of the test pillar in a room and pillar
environment. By considering symmetry conditions, one
quarter of the pillar is modeled. The vertical walls of
the model are set as frictionless by fixing the normal
displacements on them, except for pillar sides when
they are formed. The model is loaded along the top
boundary using a constant displacement of 2 10 7 m
per FLAC step.
The floor material is modeled as an elastic layer
having a 20 GPa elastic modulus. The MC interface
between the pillar and floor has strength parameters
of 0.5 MPa cohesion and friction angle of 23 degrees.
For all pillar test simulations, the friction and dilation angles are held constant at 30 and 15 degrees,
respectively.
Four pillar width-to-height (w/h) ratios (1, 2, 3,
and 4) were modeled. For each w/h ratio, the numerical
model was run with different combinations of a peak
cohesion and cohesion drop rate.
The strengths established from the test pillar models
are plotted against the empirical pillar strength formulas in Figure 6 for the cohesion drop rates of 35,
50, and 100 MPa per plastic strain (p) increment.
Based on the trends of these plots, a peak cohesion
Peak strength (MPa)
Figure 5. Test pillar model geometry.
50 MPa/εp
09069-28.qxd 08/11/2003 20:36 PM Page 236
in Figure 8. The MC model strengths tend to increase
rapidly while MCSS model strengths follow the empirical strength trends, indicating that MCSS models give
more realistic pillar stress–deformation curves than
MC models.
30
Legend
3
= w/h ratio 3.
MC = Using MC model
MCSS = Using MCSS model.
25
3 / MC
Stress(MPa)
20
2 / MC
2.2
15
3 / MCSS
1 / MC
10
2 / MCSS
5
Gob compaction
The gob compaction process is an essential part of the
longwalling process since it can alter the pillar and
abutment loads by acting as an additional support for
the system. The gob behavior is based on the following
“compaction” model: vertical stress (v) in the gob
increases with increasing vertical strain (v) according
to the relationship given by Salamon (1990),
1 / MCSS
0
0
0.002
0.004
0.006
0.008
0.01
0.012
0.014
Strain
(1)
Figure 7. The vertical stress–strain curves of MC and
MCSS pillars.
50
45
40
Peak Strength (MPa)
Salamon's
Bieniawski's
MC models
MCSS models
MC models peak
strength could not
be defined beyond
this point
35
30
25
20
15
10
5
0
0
1
2
3
4
5
6
7
8
w/h
Figure 8. Pillar strength determination from numerical
modeling and empirical formulas (refer to Figure 6 for
empirical strength formulas).
and dilation angle values as for the MCSS model. By
averaging vertical stress and the vertical deformation
histories across the top of the pillar, an overall
stress–strain curve for an individual pillar could be
obtained. Figure 7 shows such curves for pillar w/h
ratios of 1, 2 and 3, using MC and MCSS criteria.
The difference in pillar response is obvious; MC
does not allow the true softening (no peak strength and
no strength drop) and pillars maintain high residual
strengths. On the other hand, MCSS models yield and
reach much lower residual strengths. The pillar strength
values, corresponding to both MC and MCSS materials, are plotted against the empirical pillar strength
formulas of Salamon (1967) and Bieniawski (1984)
where “a” is gob initial deformation modulus; and “b”
is the limiting vertical strain. Based on studies carried
out at the USBM on gob behavior, the values for the
constants were taken as a 3.5 MPa and b 0.5
(Deno & Mark 1993).
Two different algorithms are considered for implementation of the gob behavior of Equation 1 in the
FLAC3D model. In the first algorithm, referred to as
the “nodal force”, the compaction load is modeled as
the sum of vertical forces applied at the grid points of
the roof elements in the back area after mining. After
each mining step, the vertical strain in a particular
zone within the gob area is used to calculate the vertical stress according to Equation 1. Grid reaction forces
are then calculated by multiplying vertical stress by the
corresponding area of the roof element. In the second
method, the gob is modeled as a non-linear elastic
material. Its bulk modulus is continually increased as
function of vertical strain within the gob area. The
algorithm for this “modulus updating” method uses the
bulk modulus K for each gob element:
(2)
where z is the vertical strain in the element (Badr
et al. 2002).
Implementation of these two methods makes use of
the “linked list” concept in FLAC3D. The nodes (or
zones) that will be replaced by gob material are defined
by their addresses in a particular linked list. Then, using
the FLAC3D programming language “FISH”, a function
updates the forces (or bulk modulus) of each node (or
zone) using Equation 1 or 2. After each mining step, the
algorithm is executed in 50 step intervals until the
model is brought to equilibrium (Badr 2003).
236
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-28.qxd 08/11/2003 20:36 PM Page 237
2.5
Analytical solution
Nodel force method
Modulus updating method
18
2
14
Cohesion (MPa)
Gob stress (Mpa)
16
50
Cohesion
Friction
Dilation
12
8
6
40
35
1.5
10
45
30
25
1
20
15
4
0.5
2
10
0
Friction and dilation (degrees)
20
5
0
10
20
30
% closure
40
50
0
Figure 9. The gob stress-closure results from the analytical
solution and two FLAC3D algorithms.
The gob compaction curves for the analytic solution (Salamon 1990) and the two FLAC3D algorithms
are compared in Figure 9. As shown, both nodal force
and modulus updating algorithms compare well with
the analytical model. Since the nodal force algorithm
requires longer running time, the modulus updating
method was embraced as the gob model for the
FLAC3D longwall simulations performed in this study.
3 RESULTS
Figure 10 defines the MCSS material parameters used
in the model, which are also summarized in Table 1.
For the coal seam, these parameters correspond to an
MCSS material having a cubic strength of about
9 MPa, friction angle of 30 degrees, and cohesion
drop rate of about 50 MPa/p.
The model of the longwall layout described in
Section 2 is brought to equilibrium elastically to horizontal and vertical virgin stress conditions of 17 MPa
at the coal seam level. The elastic coal seam is then
replaced by a MCSS material prior to development. The
entries are developed with the right entry leading the
left entry by 9 m. The entries advance by 3 m in each
mining step. A cross-cut is then mined when the trailing
entry is 9 m ahead. Mining of the longwalls is carried
out starting at the right panel. The longwall advances
initially in steps of 50 m and then the steps are reduced
to 10 m in the fine-meshed central region of the model.
After each longwall advance the area behind the longwall face is changed to “gob material” and the model
is brought to equilibrium. The pillar response to mining
is monitored using a FISH algorithm. The algorithm
keeps a record of the vertical stress and vertical strain
histories of all zones comprising the top of the pillar,
0.02
0.04
0.06
Plastic strain
Figure 10. MCSS parameters used for modeling of the
coal material.
Table 1. Material properties used in longwall simulations.
Property
Miscellaneous
Seam depth
Stress gradient
x, y and z
Coal properties
Coal elastic modulus
Coal Poisson’s ratio
Coal strength
Coal density
Roof properties
Elastic modulus
Poisson’s ratio
Density
Interface properties
Type
Cohesion
Friction angle
Values
680 m
0.025 MPa/m
17 MPa
3 GPa
0.25
7.6 MPa
1313 Kg/m3
20 GPa
0.25
2500 Kg/m3
Mohr–Coulomb
0.5 MPa
20°
and then averages these values to produce an average
vertical pillar stress–strain curve.
Figure 11 shows a typical pillar stress–strain curve
obtained from the FLAC3D simulation. The vertical
dashed line on the left shows the pillar loading at the
end of entry development.
At this stage, the pillar is at or close to its peak
capacity. The pre-peak stress drops indicate sidewall
failures experienced by the pillar during entry development. As the longwall approaches, the pillar initially
sheds load slowly and subsequently rapidly, eventually
reaching eight per cent compression. At its residual
strength, the pillar carries a vertical stress of 4 MPa,
237
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
0
0
09069-28.qxd 08/11/2003 20:36 PM Page 238
25
22
Average Pillar Stress (MPa)
20
20
18
Gob Stress (MPa)
Average pillar stress (MPa)
24
16
14
12
Dev.
Longwalling
10
8
17
After second
longwall
15
10
After first
longwall
6
5
4
2
0
0
0
0.02
0.04
0.06
0.08
0
10
Figure 11. Complete average vertical stress–strain curve
of the yielding chain pillar in modeled longwall layout.
which is considered sufficient for supporting the roof
in two entry systems.
The pillar strength in the longwall model is more
than that estimated by the test pillar model and empirical strength formulas. Further refinement of the
strength parameters could be achieved by iterating on
the contact and coal seam properties through parametric
studies, which would involve six independent variables,
not including parameters for the roof material. As was
the case with the test pillar model, this iterative process
would likely provide more than one set of parameters giving strength values similar to those predicted
by the empirical strength formulas. Further studies in
this area are needed to fine-tune the optimum parameter combination.
Figure 12 shows the gob compaction as mining progresses, referenced to a point at the center of the first
panel. After mining of the first panel, the vertical
stress in the gob is 1.8 MPa. The gob stress increases
to the virgin stress level of 17 MPa after the second
panel is mined.
The results from the longwall model are compared
to in-situ measurements using borehole pressure cells
(BPCs) from a mine with similar conditions (Schissler
2002). The FLAC3D model shows that the pillar hardens to 22 MPa while the in-situ pillar monitoring showed
16 MPa during entry development. This difference is
probably partly due to the selection of the model
parameters as discussed above, and partly due to the
installation sequence of the BPCs, which occurred
after the pillar was developed, and thus did not completely capture the side wall loading by the approaching development faces. When the pillar yielded in the
model, the longwall face was approximately 150 m
from the pillar centerline. Although there is no in-situ
load measurement available in pillars under similar
30
40
50
Figure 12. Vertical stress and closure induced at a point in
the gob.
situations, the authors’ observations of intense pillar
scaling in similar face positions in deep coal mines
support the finding of the model.
4 CONCLUSIONS
A three dimensional model of a coal longwall mine is
developed using FLAC3D. The model incorporates mining stages, softening behavior of the coal seam, and gob
compaction in the mined out area. The model results
indicate that FLAC3D is a suitable tool to aid in the
design, evaluation, and performance assessments for
complex longwall layouts.
The test pillar studies show that the Mohr–Coulomb
Strain Softening model is more realistic than the traditional Mohr–Coulomb constitutive law for estimating
the strength and post peak behavior of coal pillars.
The strain softening parameters developed in this
study could be used as a starting point for modeling of
coal seams. However, due to more than one combination
of strength parameters giving the same rock mass
strength value and also mesh size dependency of the
program, it is advised that the strength parameters for
a particular coal seam be developed on a case bases,
using a back-analysis process similar to that described
in the paper.
ACKNOWLEDGMENT
This publication was supported by Cooperative
Agreement number U60/CCU816929-02 from the
Department of Health and Human Services, the Center
for Disease Control and Prevention (CDC). Its contents
are solely the responsibility of the authors and do not
necessarily represent the official views of the Department
238
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
20
% CLOSURE
Strain
09069-28.qxd 08/11/2003 20:36 PM Page 239
of Health and Human Services, CDC. Support provided
by Department of Health and Human Services, CDC, is
greatly acknowledged. The work presented is part of the
Health and Safety research activities currently carried
out at Western Mining Resource Center (WMRC) at the
Colorado School of Mines.
REFERENCES
Badr, S.A., Schissler, A., Salamon, M.D.G. & Ozbay, U.
2002. Numerical Modeling of Yielding Chain Pillars in
Longwall Mines. Proc. of the 5th North American Rock
Mechanics Symposium, Toronto, Canada, pp 99–107.
Badr, S.A. 2003. Numerical Analysis of coal yield pillars at
deep longwall mines. Ph.D. Thesis in preparation.
Department of Mining Engineering, Colorado School of
Mines, Golden, Colorado (To be submitted.).
Bieniawski, Z.T. 1984. Rock Mechanics Design in Mining
and Tunneling. A.A. Balkema, p. 1–272.
Deno, M.P. & Mark, C. 1993. Behavior of Simulated Longwall
Gob material. United States Department of the Interior,
Bureau of mines, Report of investigation No. 9458.
Itasca Consulting Group, Inc. 2002. FLAC3D – Fast
Lagrangian Analysis of Continua in Three Dimensions,
Ver. 2.1. Minnesota: Itasca.
Salamon, M.D.G. 1990. Mechanism of caving in longwall coal
mining. Paper in Rock Mechanics Contributions and
Challenges Proceedings of the 31st US Symposium, Ed.
W. Hustrulid and G. A. Johnson. Denver, Colorado, June
18–20, 1990. A.A. Balkema, 1990, p. 161–168.
Salamon, M.D.G. 1967. A study of the strength of coal pillars.
Journal of South Africa Institute of Mining and Metallurgy,
v. 68, p. 55–67.
Schissler, A. 2002. Yield pillar design in non-homogenous
and isotropic stress fields for soft minerals. Ph.D. Thesis.
Department of Mining Engineering, Colorado School of
Mines, Golden, Colorado.
239
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-29.qxd 08/11/2003 20:36 PM Page 241
FLAC and Numerical Modeling in Geomechanics, Brummer et al. (eds)
© 2003 Swets & Zeitlinger, Lisse, ISBN 90 5809 581 9
FISH functions for FLAC3D analyses of irregular narrow vein mining
H. Zhu & P.P. Andrieux
Itasca Consulting Canada Inc., Sudbury, Ontario, Canada
ABSTRACT: FISH functions were developed to generate FLAC3D elements and to accurately present numerical simulation results for underground mining situations whereby the ore lenses have complex geometries and
erratic distributions. The element-generating FISH functions for FLAC3D proved flexible and provided significant timesavings during the model construction stage. Furthermore, these functions made it easier to modify
a model, to achieve a high degree of resolution in the domains of interest and to create a minimum number of
elements in order to minimize the computational power required to run the model.
Long, narrow and winding ore bodies with complex geometries do not lend themselves well to the representation on longitudinal sections of the modeling results, mainly because the rendering planes wander in and out
of the ore body. Such ore bodies are however often visualized and managed based on their longitudinal appearance, which is typically projected and simplified on an idealized plane. This difficulty of longitudinally showing the predicted stresses and displacements within the ore lens can impair the full and clear understanding of
the modeling results. This paper describes two means of solving this problem based on FISH functions. The
FISH functions presented in this paper have been applied to, and validated by, a FLAC3D modeling exercise
carried out at the Falconbridge Thayer Lindsley Mine near Sudbury, Ontario, Canada.
1 GENERAL INSTRUCTIONS
There are essentially two ways to build a FLAC3D
numerical model: one is to generate regular elements
over the entire domain and then structure the desired
geometry and geology around them, the other is to set
FLAC-provided blocks for specific objects to simulate
and to assemble these blocks into the model. In underground mining numerical modeling applications the
first approach is generally used because there is usually
no need to account for topographically irregular ground
surfaces or very complex and precise excavations, as is
often the case in civil engineering applications. This
method, although quite versatile, can however result in
the creation of a large number of elements in order to
achieve the desired degree of resolution, particularly
when the geometry of the ore lenses is complex, or
when multiple independent ore lenses are present. A
large number of elements can, in turn, result in excessively long running times and even prevent a model
from running if the computer platform is insufficiently
powerful. In such cases, the second strategy may not be
adequate either, due to the irregularity of the geometry
of the ore lenses. Furthermore, it is usually more timeconsuming to build a model using the second approach.
Narrow and undulating ore lenses also make it difficult to represent the simulation results on longitudinal views. The existing FLAC3D “plot” command can
prove inadequate to illustrate load and deformation
results because longitudinal sections generated through
the approximate center of a given narrow and undulating ore lens typically wanders in and out of it. This
made it difficult to visualize the stress redistribution
and deformation everywhere within the ore lens itself.
Two approaches can be used to solve this problem.
One consists of extracting from save files the stress
and deformation data at each point along a curved
surface centered in the middle of the undulating narrow body of interest, and to generate iso-contour plots
with specialized software (such as Goldsoft Surfer®,
for example). This approach has the advantage of
allowing the user to extract and plot any desired
parameter or criterion, such as factors of safety or
custom-defined stress ratios, and to clearly represent
their variation. Another way is to define a thin central
zone in the middle of the undulating narrow body as a
FLAC3D Group or a FLAC3D Range, which can subsequently be used to represent a true longitudinal section. This approach allows use of existing FLAC3D
commands and functions to generate the plots. Both
241
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-29.qxd 08/11/2003 20:37 PM Page 242
methods require FISH functions that are quite similar.
The first approach is however more flexible and more
precise, but requires additional third-party software.
Ore lens of
#2 Zone
(a) Plan view of Level 11-0.
2 GENERATION OF THE ELEMENTS FOR A
FLAC3D MODEL
Ore lens of
#4 Zone
Ore lens of
#3 Zone
(b) Cross-section looking East, showing (c) Plan view fo Level 13-1.
the vertical extent of the ore bodies.
Figure 1. Various views of the Thayer Lindsley Mine ore
lenses showing the relatively narrow and winding #2 Zone,
which was the ore lens of interest in the numerical exercise.
The figure also shows the satellite lenses of the #3 and
#4 zones, which had to be considered in the model. (The
figures are at different scales.)
dxyz(1,3)
As shown in Figure 1, the geometry of the #2 Zone
ore lens at the Falconbridge Thayer Lindsley (T.L.)
Mine near Sudbury, Ontario, Canada, is quite complicated and resulted in difficulties being encountered
when constructing a representative FLAC3D model. A
series of FISH functions was therefore developed to
generate the elements throughout the entire model.
Also, the narrow and undulating geometry of this lens
made it difficult to represent the simulation results on
a true longitudinal section, i.e. on a longitudinal section that did not wander in and out of the ore material.
The T.L. ore body is up to 500 meters in strike
(East–West) and occurs as several distinct lenses
below Level 13-2 as shown in Figure 1. The narrowest lens width encountered is approximately 5 meters.
The maximum width is of the order of 20 meters. A
400 m-high, 240 m-thick (in the North–South direction) and 300 m-long (in the East–West direction)
section of the mine, centered on the #2 Zone, represented the region of interest for the FLAC3D simulations. A resolution of 5 meters in the East–West
direction, by 2 meters in the North–South direction,
by 5 meters in the vertical direction was considered a
minimum requirement within the domain of interest.
Such a resolution would require as many as 960,000
elements for the inner domain, and close to 1.2 million elements for the entire model. This would make it
almost impossible to run the model on even the most
powerful personal computers currently available.
From a geomechanics perspective it is not necessary to generate elements with the same resolution
within the entire internal region of a model, as illustrated in Figure 2. As a result, this internal model can
be divided into several blocks with different element
resolutions, in order to end up with a reasonably sized
model. This rationale lead to the development of a FISH
functions-based approach for the construction of the
FLAC3D model, which would be broadly applicable to
many other geometries.
For the T.L. Mine analyses, four different element
resolutions were used, as shown in Figure 2. Block #1,
which contained the #2 Zone of interest, was assigned
the finest resolution of 5 meters in the East–West
direction, by 2 meters in the North–South direction,
by 5 meters in the vertical direction. Block #2, which
had a different panel height, was assigned a coarser
10 m 2 m 10 m resolution. Block #3, which covers the satellite ore lenses and previously mined-out
voids, was assigned a yet coarser 10 m 4 m 10 m
dayz(i,1)
Coordinates at the point O: dxyz(i,J)
Index j (1,2,and3) corresponds to x,y, and z.
Boundary
block (outer
model)
Internal model
Coordinates at point O:
dxyz (i, j)
Index j (1, 2, and 3) corresponding to x, y, and z.
Figure 2. Schematic sketch showing the model structure
and block parameters.
resolution. Finally, Block #4, which encompassed the
rest of the internal model, was fitted with the coarsest 20 m 8 m 20 m resolution. As a result, the
number of elements inside the internal model
dropped from 960,000 to 248,500, which allowed
the model to be run on a personal (albeit upper end)
computer.
The FISH function developed and used to generate
the elements in the five blocks within the internal
model, as well as in the outer model, is shown in
Appendix I.
This FISH function can be used to modify the
model and to create other models for situations with a
generally similar geometry – different values simply
have to be assigned to the variables. The function as it
stands allows the user to break the internal model into
up to ten blocks – this maximum number of blocks
can also be customized if the user is familiar with the
FISH language. A separate file was prepared to invoke
each sub-routine in the function in order to assign initial
values to the parameters.
242
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
Illustration
of the initial
parameters
of a block
09069-29.qxd 08/11/2003 20:37 PM Page 243
3 CREATION OF A NON-PLANAR
LONGITUDINAL SECTION THAT
FOLLOWS THE CENTRE OF A NARROW
AND UNDULATING ZONE
Longitudinal sections are well-suited to, and widely
used for, the planning and sequencing of full-width
open stopes in narrow ore lenses that are extracted by
means of retreating mining methods. When longitudinal sections are used for planning and sequencing it is
advantageous to also use them to display the stress
and deformation results from numerical analyses. Not
only do they represent a viewpoint familiar to the mine
personnel, they also clearly show how stress is redistributed in workings ahead of the mining front as the
extraction sequence progresses. Such longitudinal section views are being widely used at T.L. Mine. FLAC3D
results would ideally have been shown on them. The
difficulty, as described previously, is that – as is the case
at T.L. Mine – it is impossible when the ore lens is narrow and undulates over an amplitude greater than its
width for a true (planar) longitudinal section to remain
entirely within it. (In general under these circumstances,
the longitudinal sections used for planning purposes are
composite simplified views, not true sections.) As a
result, FISH functions had to be developed to create
stress and displacement plots along the geometrical
center of the lens. The approach is illustrated in Figure 3.
The procedure can be summarized as follows:
1. select the groups that encase the area to be examined;
2. search the footwall and handing wall boundaries by
element along the strike of the ore lens;
3. identify the ID of the elements where the boundaries are;
4. calculate the coordinates of the point between the
two boundaries. This point needs to keep the
desired hanging wall-to-footwall distance ratio to
these boundaries;
5. if this point lies in an edge element along the strike
direction, extend the extraction further outwards
(into the surround rock mass) by a predetermined
distance (represented by the lines of A—A, B—B,
and C—C in Fig. 3);
6. trace the element ID to which this point belongs;
7. output the element stresses to a file for further analysis, or name this element in a new Range/Group; and,
8. repeat the procedure for each level.
A continuous surface entirely comprised within
the ore lens and following its center will be obtained
by connecting all the points generated in this manner.
The desired longitudinal section can thus be constructed either by projecting this surface onto a longitudinal plan, or by ignoring the y coordinate (as was
done in the case of T.L. Mine).
The FISH function developed to generate a longitudinal section that follows the center of a narrow and
undulating zone is shown in Appendix II. The option
of naming a new Group is recommended in order to
avoid the need for external software packages, such as
Surfer™ for example, to present the FLAC3D results.
However, the alternate approach of extracting the element stresses from the middle of the ore zone was
employed for the T.L. Mine, due to its higher precision
and the need in this particular case to examine a userdefined stress ratio.
4 FURTHER APPLICATION OF CUSTOMISED
FISH FUNCTIONS AT THE FALCONBRIDGE
THAYER LINDSLEY MINE
A user-defined stress ratio was also used at T.L. to
evaluate the state of the rock mass throughout the #2
Zone of interest. The objective of this work was to not
only assess which elements had started to undergo
failure, but also determine how far elastic state elements were from. The stress ratio retained is defined
as 1/ 1 , and is illustrated Figure 4.
τ
Element
Strength envelope
Hanging wall
A
A
B
B
C
C
3
Footwall
Figure 3. Sketch illustrating the concept of constructing a
non-planar longitudinal section from an arbitrary narrow
and undulating ore lens.
1'
Figure 4. Illustration of the user-defined stress ratio where
1 and 3 are the major and minor principal stress of rock
mass, respectively, at a given point as computed by FLAC3D.
1 is the major principal stress at this point assuming that the
rock mass is undergoing yielding under the same confinement conditions.
243
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
1
09069-29.qxd 08/11/2003 20:37 PM Page 244
Figure 5. Longitudinal section looking North illustration of the Surfer™-generated contours of a user-defined stress ratio
based on the customized FISH functions described in the previous sections.
Figure 5 shows a simplified composite longitudinal
section of the T.L. Mine #2 Zone. The small squares
along the edge of the excavations represent the state
of the local rock mass at a given mining step, as
inferred from the FLAC3D results. The overlaid contours
of the user-defined stress ratio were generated based
on the stresses at each element extracted with the FISH
function mentioned previously. In the areas where the
rock mass is still in its elastic state, which are beyond
the small squares as shown in Figure 5, the low values
of the stress ratio refer to a low likelihood that stressinduced problems will arise at this mining stage. With
the help of the FISH function, the state of the rock
mass can be illustrated quite precisely.
In Figure 5, all the numerical elements from which
the stresses were extracted are those located the closest to the middle of the #2 Zone ore lens at T.L. Mine,
or those extending into the surrounding rock mass
away from the east and west boundaries of the lens.
These contours present quite a bit of information
about the state of the rock mass, both in the main lens
and the surrounding rock. Furthermore, how far away
the elastic state rock is from the onset of yielding can
be readily estimated and displayed by the contours
generated by the customized FISH functions.
Currently, this cannot be achieved with any built-in
FLAC command.
5 CONCLUSIONS
User-defined FISH functions can be a powerful tool
to solve various FLAC or FLAC3D numerical modeling
problems. The FISH function presented in this paper
for the generation of regular elements is applicable to
many scenarios where similar geometrical issues are
present. The other FISH function discussed in this
paper is a good example of how experienced FLAC
and FLAC3D users can develop very specific functions
to solve specific problems.
ACKNOWLEDGEMENTS
The authors would like to thank Scott Carlisle1 for
reviewing, and Falconbridge Limited for granting
permission to publish this paper and for the use of
Thayer Lindsley data.
REFERENCE
Itasca Consulting Group, Inc. (1997) FLAC3D – Fast
Lagrangian Analysis of Continua in 3 Dimensions,
Version 2.0. Minneapolis, MN: Itasca.
APPENDIX I – FISH FUNCTION FOR THE
GENERATION OF THE ELEMENTS OF A
FLAC3D MODEL
; Define blocks in the internal region of the model
; num_box10 blocks currently limited
def Ore_box
array xyz(10,3),dxyz(10,3),p_xyz(10,3)
loop i (1,num_box)
P0_xxyz(i,1)
P0_yxyz(i,2)
P0_zxyz(i,3)
p_xyz(1,1)p0_x
p_xyz(1,2)p0_y
p_xyz(1,3)p0_z
1
Falconbridge Limited, Sudbury Mines/Mill Business Unit –
Mining Services, Onaping, Ontario, P0M 2R0, Canada.
244
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-29.qxd 08/11/2003 20:37 PM Page 245
P_xyz(2,1)p0_x dxyz(i,1)
P_xyz(2,2)p0_y
P_xyz(2,3)p0_z
P_xyz(3,1)p0_x
P_xyz(3,2)p0_y dxyz(i,2)
P_xyz(3,3)p0_z
P_xyz(4,1)p0_x
P_xyz(4,2)p0_y
P_xyz(4,3)p0_z dxyz(i,3)
P_xyz(5,1)p0_x dxyz(i,1)
P_xyz(5,2)p0_y dxyz(i,2)
P_xyz(5,3)p0_z
P_xyz(6,1)p0_x
P_xyz(6,2)p0_y dxyz(i,2)
P_xyz(6,3)p0_z dxyz(i,3)
P_xyz(7,1)p0_x dxyz(i,1)
P_xyz(7,2)p0_y
P_xyz(7,3)p0_z dxyz(i,3)
P_xyz(8,1)p0_x dxyz(i,1)
P_xyz(8,2)p0_y dxyz(i,2)
P_xyz(8,3)p0_z dxyz(i,3)
loop n (1,8)
id_pn 8*(i-1)
P_xp_xyz(n,1)
P_yP_xyz(n,2)
P_zP_xyz(n,3)
command
gen po id id_p p_x p_y p_z
end_command
end_loop
end_loop
end
; Building boundary blocks
def right_box
; calculate the dimensions of this box in x, y and z
; xyz_ratio grid length ratio
; n_grid number of grids
; x_1, y_1 and z_1 element length along
; corresponding directions in boundary blocks
; x0, y0 and z0 coordinates of point O of the
; internal model as shown in Figure 2.
x_lenx_1*(1-xyz_ratio^n_grid)/(1-xyz_ratio)
y_leny_1*(1-xyz_ratio^n_grid)/(1-xyz_ratio)
z_lenz_1*(1-xyz_ratio^n_grid)/(1-xyz_ratio)
P0_xx0 dx
P0_yy0
P0_zz0
P1_xx0 dx x_len
P1_yy0-y_len
P1_zz0-z_len
P2_xx0 dx
P2_yy0 dy0
P2_zz0
P3_xx0 dx
P3_yy0
P3_zz0 dz
P4_xx0 dx x_len
P4_yy0 dy0 y_len
P4_zz0-z_len
P5_xx0 dx
P5_yy0 dy0
P5_zz0 dz
P6_xx0 dx x_len
P6_yy0-y_len
P6_zz0 dz z_len
P7_xx0 dx x_len
P7_yy0 dy0 y_len
P7_zz0 dz z_len
Y_S_boun p1_y
Z_B_boun p1_z
command
gen po id 1011 p0_x p0_y p0_z
gen po id 1012 p1_x p1_y p1_z
gen po id 1013 p2_x p2_y p2_z
gen po id 1014 p3_x p3_y p3_z
gen po id 1015 p4_x p4_y p4_z
gen po id 1016 p5_x p5_y p5_z
gen po id 1017 p6_x p6_y p6_z
gen po id 1018 p7_x p7_y p7_z
end_command
end
def Back_box
P0_xx0
P0_yy0 dy0
P0_zz0
P1_xx0 dx
P1_yy0 dy0
P1_zz0
P2_xx0-x_len
P2_yy0 dy0 y_len
P2_zz0-z_len
P3_xx0
P3_yy0 dy0
P3_zz0 dz
P4_xx0 dx x_len
P4_yy0 dy0 y_len
P4_zz0-z_len
P5_xx0-x_len
P5_yy0 dy0 y_len
P5_zz0 dz z_len
P6_xx0 dx
P6_yy0 dy0
P6_zz0 dz
P7_xx0 dx x_len
P7_yy0 dy0 y_len
P7_zz0 dz z_len
X_E_bounp7_x
Y_N_bounp7_y
Z_T_bounp7_z
command
gen po id 1021 p0_x p0_y p0_z
gen po id 1022 p1_x p1_y p1_z
gen po id 1023 p2_x p2_y p2_z
245
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-29.qxd 08/11/2003 20:37 PM Page 246
gen po id 1024 p3_x p3_y p3_z
gen po id 1025 p4_x p4_y p4_z
gen po id 1026 p5_x p5_y p5_z
gen po id 1027 p6_x p6_y p6_z
gen po id 1028 p7_x p7_y p7_z
end_command
end
def Top_box
P0_xx0
P0_yy0
P0_zz0 dz
P1_xx0 dx
P1_yy0
P1_zz0 dz
P2_xx0
P2_yy0 dy0
P2_zz0 dz
P3_xx0-x_len
P3_yy0-y_len
P3_zz0 dz z_len
P4_xx0 dx
P4_yy0 dy0
P4_zz0 dz
P5_xx0-x_len
P5_yy0 dy0 y_len
P5_zz0 dz z_len
P6_xx0 dx x_len
P6_yy0-y_len
P6_zz0 dz z_len
P7_xx0 dx x_len
P7_yy0 dy0 y_len
P7_zz0 dz z_len
X_W_bounp3_x
command
gen po id 1031 p0_x p0_y p0_z
gen po id 1032 p1_x p1_y p1_z
gen po id 1033 p2_x p2_y p2_z
gen po id 1034 p3_x p3_y p3_z
gen po id 1035 p4_x p4_y p4_z
gen po id 1036 p5_x p5_y p5_z
gen po id 1037 p6_x p6_y p6_z
gen po id 1038 p7_x p7_y p7_z
end_command
end
; generate elements in the internal regions of the
; model
def gen_ele
array Len_xyz(10,3)
; reference point for reflected boundary boxes
x_refx0 dx/2.0
y_refy0 dy0/2.0
z_refz0 dz/2.0
num_x1dx/x_1
num_y1dy0/y_1
num_z1dz/z_1
loop n (1,num_box)
id_p11 8*(n-1)
id_p22 8*(n-1)
id_p33 8*(n-1)
id_p44 8*(n-1)
id_p55 8*(n-1)
id_p66 8*(n-1)
id_p77 8*(n-1)
id_p88 8*(n-1)
num_xdxyz(n,1)/Len_xyz(n,1)
num_ydxyz(n,2)/Len_xyz(n,2)
num_zdxyz(n,3)/Len_xyz(n,3)
command
gen zone bri &
p0 po id_p1 p1 po id_p2 p2 po id_p3 p3 po id_p4 &
p4 po id_p5 p5 po id_p6 p6 po id_p7 p7 po id_p8 &
size num_x num_y num_z &
group waste &
rat 1 1 1
end_command
end_loop
; generate elements in boundary blocks
; generate elements in one boundary block and then
; reflect to the opposite side
command
; Left-hand and right-hand sides
gen z brick &
p0 po 1011 p1 po 1012 p2 po 1013 p3 po 1014 &
p4 po 1015 p5 po 1016 p6 po 1017 p7 po 1018 &
size n_grid num_y1 num_z1 &
group right_side &
ratio xyz_ratio 1 1
gen zone reflect dip 90 dd 90 ori x_ref y_ref z_ref &
range group right_side
; Back and front
gen z brick &
p0 po 1021 p1 po 1022 p2 po 1023 p3 po 1024 &
p4 po 1025 p5 po 1026 p6 po 1027 p7 po 1028 &
size num_x1 n_grid num_z1 &
group Back_side &
ratio 1.0 xyz_ratio 1
gen zone reflect dip 90 dd 180 ori x_ref y_ref z_ref &
range group back_side
; Top and bottom
gen z brick &
p0 po 1031 p1 po 1032 p2 po 1033 p3 po 1034 &
p4 po 1035 p5 po 1036 p6 po 1037 p7 po 1038 &
size num_x1 num_y1 n_grid &
group Top_side &
ratio 1.0 1.0 xyz_ratio
gen zone reflect dip 0 dd 0 ori x_ref y_ref z_ref &
range group top_side
end_command
command
group external range group waste not
end_command
end
246
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-29.qxd 08/11/2003 20:37 PM Page 247
APPENDIX II – FISH FUNCTION FOR THE
CREATION OF A LONGITUDINAL SECTION
IN THE CENTRE OF THE UNDULATING ORE
ZONE
def get_profile
x_0x_west
; x coordinates on west edge of area to be searched
y_0y_south
x_1x_east
y_1y_north
; element length in the x direction
x_dx_length
y_dy_length
; group name of the main zone to be examined
name_ggroup_name
; referring to the next FISH function for z_t and z_b
z_po(z_t z_b)/2.0
n_x(x_1-x_0)/x_d
n_y(y_1-y_0)/y_d
if flag_boun0 then
; top element. Extend search 25m upwards
z_1z_t 25.0
z_0z_b
end_if
; bottom element
if flag_boun1 then
; extend search 25m downwards to next level
z_1z_t
z_0z_b-25.0
end_if
; either top or bottom level
if flag_boun2 then
z_1z_t
z_0z_b
end_if
kkn0
loop n1 (1,n_x)
;start point in the x direction
x_pox_0 x_d*(n1-0.5)
x_wx_po-0.5*x_d
x_ex_po 0.5*x_d
a_miny_north
a_maxy_south
kn0
; searching FW and HW
loop n2 (1,n_y)
y_poy_0 y_d*(n2-0.5)
p_zz_near(x_po,y_po,z_po)
z_grz_group(p_z)
if z_grname_g then
g_p1z_gp(p_z,1)
g_p2z_gp(p_z,3)
y_mingp_ypos(g_p1)
y_maxgp_ypos(g_p2)
if y_min a_min then
a_miny_min
end_if
if y_max>a_max then
a_maxy_max
knkn 1
end_if
end_if
end_loop
; main zone has been found
if kn # 0 then
kknkkn 1
x_kknx_e
y_s(a_min+a_max)/2.0-0.55*y_d
y_n(a_min+a_max)/2.0 0.55*y_d
end_if
; on west edge of the main zone
if kkn1 then
x_wx_0
end_if
if kn # 0 then
command
group profile ra x x_w x_e y y_s y_n z z_0
z_1
end_command
end_if
; on the east edge of the main zone
if n1n_x then
command
group profile ra x x_kkn x_1 y y_s y_n z z_0 z_1
end_command
end_if
end_loop
end
; search loop on z direction in the next FISH function
def get_para
loop n (1,60)
if n 40 then
z_interval5
else
z_interval10
end_if
z_b2310-z_interval*(n-1)
z_tz_b z_interval
flag_boun2
if n1 then
flag_boun0 ;top element
end_if
if n10 then
flag_boun 1 ;bottom element
end_if
get_profile ; invoke the above FISH function
end_loop
end
247
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-30.qxd 08/11/2003 20:38 PM Page 249
Soil structure interaction
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-30.qxd 08/11/2003 20:38 PM Page 251
FLAC and Numerical Modeling in Geomechanics, Brummer et al. (eds)
© 2003 Swets & Zeitlinger, Lisse, ISBN 90 5809 581 9
A calibrated FLAC model for geosynthetic reinforced soil modular
block walls at end of construction
K. Hatami & R.J. Bathurst
GeoEngineering Centre at Queen’s-RMC, Royal Military College of Canada, Kingston, Ontario
T. Allen
Washington State Department of Transportation, Washington, USA
ABSTRACT: The paper describes a FLAC numerical model that was developed to simulate the construction
and measured response of large-scale geosynthetic reinforced soil walls that were constructed at the Royal
Military College of Canada (RMC). The reinforced soil structures were constructed with three different polymeric reinforcement configurations. The backfill strength properties and reinforcement material properties
were determined from conventional laboratory tests. The soil elastic modulus values were back calculated from
surcharge loading tests on the wall backfill. The numerical models were able to capture the observed differences
in wall behavior due to different reinforcement configurations to within the accuracy of the measurements.
Reinforcement strain magnitudes and distribution were more accurately predicted using a stress-dependent
model for the soil backfill compared to a linear elastic model.
1 BACKGROUND
A recent study by Allen et al. (2002) of the design,
analysis and performance of instrumented full-scale
geosynthetic reinforced soil walls constructed in the
field has demonstrated that current design practice is
excessively conservative. For example, they showed
that most walls constructed to date could be expected
to perform satisfactorily with as little as 50% of
the reinforcement that has been used in the past.
Nevertheless, the number of instrumented field walls
reported in the literature is sparse and there is a
requirement for better data and a wider range of case
studies in order to refine current design methodologies that are based on conventional geotechnical limit
equilibrium approaches. To fill this requirement, the
GeoEngineering Centre at Queen’s-RMC at the Royal
Military College of Canada (RMC) has been engaged
in the construction, surcharge loading and monitoring
of carefully instrumented large-scale geosynthetic reinforced soil retaining walls built within a controlled
laboratory environment (Bathurst et al. 2001). This
on-going research program has also been conceived
to generate high-quality and comprehensive data that
can be used to calibrate advanced numerical models
of geosynthetic reinforced soil walls. The calibrated
models can then be used to extend the database of
physical tests to a wider range of reinforced soil wall
types and configurations. The combination of physical and numerical test results can then be used to
check or refine recently proposed analytical design
methods for geosynthetic reinforced soil wall structures that hold promise to make these systems more
cost effective (e.g. Allen et al. 2003).
This paper is focused on the second step in this
long-term research program, i.e. calibration of a
FLAC numerical model for three recent large-scale
test walls at RMC that were constructed with a
polypropylene geogrid reinforcement material. This
paper extends the results of an earlier paper by
Hatami & Bathurst (2001) that was focused on a
FLAC (Itasca 1998) numerical model for a single wall
in the physical test program that was constructed using
a polyester geogrid reinforcement material. In the current paper, the numerical model is calibrated against
the end-of-construction stage for each of the walls,
which represents a working stress condition. This is the
operational condition that is of most interest to designers as opposed to an ultimate limit state or failure
condition. The paper reports details of the constitutive models used for the component materials in the
walls and compares selected measured and predicted
responses for the three walls including facing horizontal displacements, horizontal and vertical toe boundary
251
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-30.qxd 08/11/2003 20:38 PM Page 252
reactions and reinforcement strain distributions. The
comparisons are based on both linear elastic and nonlinear hyperbolic models for the soil backfill.
2 PHYSICAL TEST MODELS
24 rows of segmental blocks
3.60 m
Figure 1 shows a front view of an RMC test wall with
a modular block (segmental) facing. The walls were
3.6 m high with a facing batter of 8° from the vertical.
The first wall (Wall 1 – control) was built with six
layers of weak polypropylene geogrid (PP) reinforcement placed at a vertical spacing of 0.6 m. The second
8°
1.15 m 1.00 m 1.15 m
Instrumented middle
section of the wall
Reinforcement layers
Figure 1. Large-scale instrumented geosynthetic reinforced soil modular block retaining wall constructed in the
RMC Retaining Wall Test Facility.
wall was a nominally identical structure except that
the reinforcement stiffness and strength of the geogrid
were reduced by 50% by removing every other longitudinal member in each layer. Wall 3 was nominally
identical to Wall 1 except that only four reinforcement layers were used in the wall at a vertical spacing
of 0.9 m. In each structure, the wall facing consisted
of a column of discrete, dry-stacked, solid masonry
concrete blocks with continuous concrete shear keys.
The wall facing was built with three discontinuous
vertical sections with separate reinforcement layers in
plan view. The width of the instrumented middle
section was 1 m. The backfill was a clean uniform
size rounded beach sand (SP) with a flat compaction
curve. The sand was compacted to a unit weight of
16.7 kN/m3 using a lightweight vibrating mechanical
plate compactor. The friction between the backfill
soil and sides of the test facility was minimized by
placing a composite arrangement of plywood, Plexiglas
and lubricated polyethylene sheets over the sidewalls.
The discontinuous wall arrangement and sidewall
treatment were used to minimize the frictional effect
of the lateral boundaries of the test facility and to
thereby approach, as far as practical, a plane-strain
test condition for the instrumented middle section of
the wall structure. The reinforcement layers were rigidly
attached to the facing using mechanical connections
to simplify the interpretation of connection performance (i.e. this arrangement prevented any possibility
of reinforcement slippage between the blocks).
Figure 2 illustrates the test configuration for Walls
1 and 2 and the instrumentation that was used to
record wall response. The horizontal movement of the
wall facing was measured using displacement potentiometers mounted at different elevations against the
0.3 m
Facing blocks
6
Facing
potentiometer
5
Strain gauge
Extensometer
Connection load
rings
4
3.6 m
3
0.15 m
2
Horizontal toe
load ring
Reinforcement layer
1
Vertical toe load
cells
2.52 m
Figure 2. Schematic instrumentation layout of the test walls used in calibrating the numerical model (Walls 1 and 2). Note:
Wall 3 is constructed with four reinforcement layers with a vertical spacing Sv 0.9 m.
252
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-30.qxd 08/11/2003 20:38 PM Page 253
facing column. Horizontal toe loads were measured
using load rings (a horizontal restrained toe boundary
condition). Vertical toe loads were measured using
load cells supporting a double row of steel plates,
which were used in turn to seat the first course of
modular block units. A set of steel rollers was located
between the steel plates to de-couple the horizontal
and vertical toe load reactions. Reinforcement strains
in the wall were measured using strain gauges that
were bonded directly to the polypropylene geogrid
longitudinal members and extensometers attached to
selected geogrid junctions. Backfill settlements were
measured using tell-tales and settlement plates.
Further details of the construction and monitoring
techniques used in the RMC test walls have been
reported by Bathurst et al. (2001).
approaches: 1) a linear elastic (perfectly plastic)
model, and 2) the stress-dependent hyperbolic model
proposed by Duncan et al. (1980; also see Itasca
1998). Bathurst & Hatami (2001) and Hatami &
Bathurst (2002) reviewed previous attempts reported
in the literature to numerically model the response of
reinforced soil structures. Their survey showed that
the stress-dependent nonlinear elastic model (hyperbolic model) proposed by Duncan et al. (1980), or
variants, was the most common constitutive model
used to simulate the backfill response during construction and under surcharge loading. However, no
comparisons have been reported for simulations
using other models including a simple linear elastic
model. The backfill material properties used in the
current study are reported in Table 1. The values of
soil hyperbolic parameters were determined by
3 NUMERICAL MODELING
Table 1. Material properties for sand used in the numerical
model.
3.1
General
Value
The finite difference-based computer program FLAC
(Itasca 1998) was used to simulate the response of the
reinforced soil test walls up to the end of construction. Figure 3 shows the numerical grid used for the
segmental retaining walls.
3.2
Material mechanical models and properties
3.2.1 Soil
The backfill in all simulations was modeled as
a cohesionless granular soil with Mohr–Coulomb
failure criterion and dilation angle. The backfill
elastic response was simulated using two different
0.3 m
2000
2000
0.5
0.5
0.73
0–0.49
Strength properties
(peak friction angle) (deg)
c (cohesion) (kPa)
(dilation angle) (deg)
(density) (Kg/m3)
44
0
11
1730
Interfaces
°
Concrete facing blocks
Stiffness properties (Hyperbolic model)
Kc (elastic modulus number)
Kb (bulk modulus number)
n (elastic modulus exponent)
m (bulk modulus exponents)
Rf (failure ratio)
(range of permissible Poisson’s ratio values)
3.6 m
°
Reinforcement
°
0.6 m
24 x 0.15 = 3.6 m
Sand backfill
°
2.5 m
5.5 m
Figure 3. Numerical model of the segmental retaining walls (Walls 1 and 2). Note: Wall 3 is constructed with four
reinforcement layers with a vertical spacing Sv 0.9 m.
253
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-30.qxd 08/11/2003 20:38 PM Page 254
adjusting initial values taken from the results of triaxial compression tests on backfill sand specimens. The
value of Poisson’s ratio for each soil zone during
analyses was determined from the calculated values
of the soil elastic modulus and bulk modulus from the
hyperbolic model and hence was allowed to vary
between values of 0 and 0.49 as noted in Table 1. The
modulus numbers Ke and Kb were increased to match
the measured settlement response of the backfill in
the retained zone behind the reinforced soil zone during uniform surcharge loading. The backfill peak
plane-strain friction angle value was taken as
44° (Bathurst et al. 2001). The backfill dilation
angle value from direct shear tests was found to vary
from 9° to 12° for the range of confining soil
pressures in the test walls. The value 11° was
used in the numerical models.
Table 2. Reinforcement stiffness and strength properties.
Wall
Polymer
type
Number
of layers
Stiffness Jt ()
(kN/m)*
Ty
(kN/m)
W1
W2
W3
PP
PP
PP
6
6
4
138–1698
69–845
138–1698
14
7
14
* Equations valid for 2.5%
Facing
Soil-Block
Modular Interfaces
Blocks
Soil Column
Behind Facing
Nulled Zone
(magnified)
3.2.2 Reinforcement
The reinforcement layers were modeled with twonoded elastic-plastic cable elements with a straindependent tensile stiffness, J(), tensile yield strength,
Ty and no compressive strength. The reinforcement
load–strain response was modeled in parabolic form as:
Block-Block
Interfaces Connection
Backfill
Beam
Numerical
Elements Two-noded
Reinforcement Grid
Elements
(1)
where T is axial load and is axial strain. This equation is valid for 2.5% which captures the range of
in-situ measured strains that correspond to the endof-construction working stress levels for the experimental walls and is well below the reinforcement
strain at yield. The strain-dependent, secant tensile
stiffness of the reinforcement, Js (), was calculated
from Equation 1 as:
(2)
Parameter A in Equation 2 is the initial stiffness modulus and parameter B is the strain-softening coefficient, which is a positive value for polypropylene
reinforcement prior to yield. The stiffness of the
polypropylene geogrid reinforcement was determined
from the constant rate of strain tests on virgin geogrid specimens tested in-isolation at a strain rate of
0.01%/min. The reinforcement material properties
used in numerical simulations are presented in Table 2.
The structural nodes of the reinforcement cable elements were rigidly attached to the gridpoints of the
backfill numerical mesh. This was done to ensure
compatibility of displacements between reinforcement structural nodes and backfill gridpoints. With
this approach, the grout interface was not utilized
in the numerical model. Therefore, pullout of the
Figure 4. Details
connection.
of
facing-backfill-reinforcement
Table 3. Interface properties.
Value
Soil–Block
sb (friction angle) (deg)
sb (dilation angle)(deg)
knsb (normal stiffness) (kN/m/m)
kssb (shear stiffness) (kN/m/m)
44
11
0.1 106
103
Block–Block
bb (friction angle) (deg)
c (cohesion) (kPa)
knbb (normal stiffness) (kN/m/m)
ksbb (shear stiffness) (MN/m/m)
57
45.7
106
50
reinforcement from the backfill was prevented, which
was consistent with measurements recorded in the
physical tests.
3.2.3 Interfaces
The concrete facing units in the test walls were modeled as linear elastic continuum zones separated by
nulled zones of zero thickness that contained interfaces (Fig. 4). Table 3 summarizes the values for the
254
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
Backfill
(Continuum)
Zones
09069-30.qxd 08/11/2003 20:38 PM Page 255
3.2.4 Construction and boundary conditions
Fixed boundary conditions in horizontal and vertical
directions were assumed in the numerical model for
gridpoints at the rigid foundation level, and in the
horizontal direction at the backfill far-end boundary.
The toe boundary condition in the physical and numerical models is a reasonable approximation to the
restraint that can be expected for the typical field case
of a buried footing. The backfill and facing units were
placed in lifts of 150 mm (i.e. the height of one modular block) and the reinforcement layers were numerically installed as each reinforcement elevation was
reached. Backfill compaction during construction
was modeled by applying a horizontal stress component on the back of the facing units as the soil layers
and facing blocks were put in place and the model
solved to reach equilibrium. However, as described in
measured
a) Wall 1
b) Wall 2
c) Wall 3
3
2
1
0
0 2 4 6 8 10 0 2 4 6 8 10 0 2 4 6 8 10
Facing displacement (mm)
Figure 5. Measured and predicted facing displacements at
end of construction.
Section 3.2.1, greater soil modulus values than those
obtained from laboratory triaxial compression tests
were used for the backfill model. With this approach,
negligible horizontal stress was needed behind the
facing panel to simulate backfill compaction in the
walls reported in this paper.
4 RESULTS
4.1
Calibration results
The response results for each of the three test walls in
this investigation were obtained by changing the reinforcement stiffness (Table 2) or number of layers in
the numerical model to match the physical test. The
material properties for all other wall components
were kept the same.
4.1.1 Facing displacements
Figure 5 shows the measured and numerically calculated facing lateral displacement at potentiometer
levels at the end of construction. The measured displacement results are readings from the potentiometers that were mounted against the facing blocks at
reinforcement layer levels during construction. The
predicted results are obtained using the material properties shown in Tables 1–3. The results of Figure 5
show satisfactory agreement between recorded and
predicted facing lateral displacements for all three
255
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
predicted
4
Elevation (m)
interface properties used in the wall simulations. The
interfaces were modeled as a spring-slider system
with constant strength and stiffness properties. The
values of interface normal (kn) and tangential (ks)
stiffness parameters were chosen after a parametric
analysis to minimize computation time. The values
reported in Table 3 were found to be smaller than the
default values recommended in the FLAC manual
(Itasca 1998) that were used as the starting point in
the parametric analysis. The magnitude of the normal
interface stiffness value was made as large as possible
to avoid the intrusion of adjacent zones but not to
cause excessive computation time. The wall deformation response was found to be relatively insensitive to
the value of inter-block shear stiffness for ksbb
50 MN/m/m. Smaller values of ksbb together with
material properties reported in Tables 1 to 3 were
shown to over-predict measured wall deformation
results. The value ksbb 50 MN/m/m gave the best
overall agreement with the measured data. This value
is also within the range of shear stiffness values backcalculated from load-displacement results of laboratory interface shear tests on the block units (Hatami
et al. 2002). The interface shear strength was modeled
with the Mohr–Coulomb failure criterion defined
by interface cohesion and friction angle. The block–
block interface peak friction angle and equivalent
cohesion values were determined from the laboratory
interface shear tests as bb 57° and cbb 45.7 kPa,
respectively (Hatami and Bathurst 2001). The interface friction angle, sb, between the backfill and facing blocks was back-calculated from measured toe
reactions and the sum of measured connection forces
using the facing equilibrium analysis described by
Hatami and Bathurst (2001). Their analyses demonstrated that the soil-facing interface friction angle
value in the test walls was close to the magnitude of
the backfill peak plane-strain friction angle (i.e. sb 44°).
09069-30.qxd 08/11/2003 20:38 PM Page 256
test walls. Both experimental and numerical results
show greater facing displacement magnitudes for
Walls 2 and 3 constructed with lower stiffness reinforcement and fewer layers, respectively, compared to
the control wall (Wall 1).
However, while not reported in this paper, the magnitudes of strain are very different between the three
walls under surcharge loading at which time larger
wall lateral deformations have occurred and the
4.1.2 Reinforcement strains
Figures 6, 7 & 8 show the measured and predicted
reinforcement strain distributions in the test walls at
end of construction. The measured results are the data
from the strain gauge readings. The predicted strain
distributions for test walls show overall satisfactory
agreement with the experimental results. The strain
magnitudes at end of construction for all test walls are
typically less than 1%. Measured strains of this magnitude for the polymeric reinforcement used in these
walls have been calculated to have a standard deviation as large as $0.3% strain (Bathurst et al. 2003).
Hence, within the accuracy of the physical measurements, the results shown in Figures 6–8 capture both
the magnitude and distribution of strains in the measured data. The data show that strain magnitudes and
distributions are similar for all three walls. This can
be explained by the contribution of the very stiff concrete facing column that carries a large portion of
the lateral earth forces at the end of construction.
measured
predicted
0.4
0.2
0.0
Layer 6
Strain (%)
0.4
0.2
0.0
Layer 5
0.6
0.4
0.2
0.0
Layer 4
1.0
Layer 3
0.5
0.0
0.8
Layer 2
0.4
0.0
0.8
Layer 1
0.4
measured
0.2
0.1
0.0
0.0
predicted
0.0
Layer 6
0.4
0.2
0.0
0.5
1.0
Distance (m)
Layer 5
predicted
0.8
0.4
0.2
0.0
2.0
Figure 7. Measured and predicted strain distributions at
end of construction using hyperbolic soil model (Wall 2).
measured
Layer 4
Layer 4
0.4
0.0
0.8
0.8
Layer 3
0.4
Strain (%)
Strain (%)
1.5
0.0
0.8
Layer 2
0.4
0.0
Layer 3
0.4
0.0
0.8
Layer 2
0.4
0.0
0.8
0.8
Layer 1
0.4
Layer 1
0.4
0.0
0.0
0.0
0.5
1.0
1.5
2.0
0.0
Distance (m)
Figure 6. Measured and predicted strain distributions at
end of construction using hyperbolic soil model (Wall 1).
1.0
Distance (m)
1.5
2.0
Figure 8. Measured and predicted strain distributions at
end of construction using hyperbolic soil model (Wall 3).
256
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
0.5
09069-30.qxd 08/11/2003 20:38 PM Page 257
tensile load capacity of the reinforcement layers is
mobilized (Bathurst et al. 2001). The calculated maximum reinforcement load in all wall models at end of
construction was less than 1 kN/m, which was well
below the yield strength of the reinforcement materials (Table 2).
4.1.3 Toe reactions
Figure 9 shows the histories of the measured and calculated horizontal and vertical toe loads for the test
walls during construction. The figure shows a satisfactory agreement between the predicted and measured horizontal and vertical toe reactions for the walls
at the end of construction. The plots of measured horizontal toe load during construction of Walls 2 and 3
deviate from a smooth curve at early stages during
construction. This is thought to be due to a local
greater soil compaction effort at the back of the facing units during construction. Otherwise the plots of
predicted and recorded horizontal toe loads are in
close agreement. The results shown in Figure 9 indicate that wall reinforcement stiffness or number of
layers has a negligible effect on the magnitude of toe
loads during construction for the wall height and reinforcement configurations examined. The reason for
this consistent response, particularly with respect to
50
vertical
a) Wall 1
measured
predicted
40
30
horizontal loads is the strong influence of the heavy
facing column as noted previously.
4.2
Influence of soil model on predicted
wall response
Selected response features of Wall 2 were examined
using a linear elastic soil model with the values of
Young’s modulus and Poisson’s ratio taken as
E 48 MPa and v 0.2, respectively. The value of
Young’s modulus was back calculated from the measured pressure-settlement results of the backfill behind
the reinforced soil zone during surcharge loading.
Figure 10 shows the measured response and the predicted facing displacement results using the linear
elastic and hyperbolic soil models for Wall 2. The
plotted values are deformations with respect to the
time of installation of each displacement device.
Hence, these plots should not be confused with the
actual wall deformation profiles at the end of construction. Both predicted curves capture the range of
wall deformations recorded at the end of construction. The close agreement between the predicted facing displacement results in Figure 10 indicates that
the values of soil hyperbolic model parameters reported
in Table 1 are consistent with a constant soil modulus
value that was determined from the measured loadsettlement response of the backfill. This result may
not be unexpected since the hyperbolic modulus numbers Ke and Kb in Table 1 were independently
4
20
measured
hyperbolic soil model
linear elastic soil model
horizontal
10
3
vertical
b) Wall 2
40
Elevation (m)
Toe reaction (kN/m)
0
50
30
20
horizontal
10
0
2
50
vertical
c) Wall 3
40
1
30
20
horizontal
10
0
0
0
5
10
15
20
0
25
Number of facing units (blocks)
Figure 9. Measured and predicted toe reaction forces
during wall construction.
10
Figure 10. Measured and predicted facing displacements
of Wall 2 at end of construction.
257
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
2
4
6
8
Facing displacement (mm)
09069-30.qxd 08/11/2003 20:38 PM Page 258
Toe reaction (kN/m)
obtained by matching the load-settlement response of
the backfill retained zone under surcharge loading as
explained in Section 3.2.1. Figure 11 also shows that
the predicted toe reaction responses were essentially
identical using both soil models. Taken together, the
data in Figures 10 and 11 suggest that the simpler
elastic soil model is sufficient to model these performance features of the wall. However, the results using
the two soil models shown in Figure 12 illustrate a
subtle but important difference in the distribution and
50
linear elastic
40
vertical
hyperbolic
30
20
horizontal
10
0
0
5
10
15
20
Number of facing courses placed
25
Figure 11. Comparison of predicted toe reaction forces
using linear elastic and hyperbolic soil models during
construction (Wall 2).
linear elastic
0.2
0.1
0.0
Layer 6
0.4
0.2
0.0
Strain (%)
hyperbolic
Layer 5
0.6
0.4
0.2
0.0
Layer 4
magnitude of predicted strains in the reinforcement
layers at the end of construction for Wall 2.
Specifically, the predicted peak reinforcement strains
using the soil linear elastic soil model are located farther back from the facing compared to the peaks from
the hyperbolic model. Comparison with Figure 7
shows that the measured predicted peak strains are
located close to the back of the facing column and not
within the reinforced soil mass as predicted for all
layers in Figure 12 with the exception of layer 1. The
absence of peak strain values within the reinforced
soil mass (as predicted using the linear elastic soil
model) was corroborated by the lack of a visible shear
zone in the backfill at the time of careful soil excavation of the wall. On the other hand, both the hyperbolic model results and the measured data show
relatively high reinforcement strain magnitudes at the
connections with the facing panel at end of construction, which are not captured using the linear elastic
model. It can be argued that horizontal stresses in the
soil decrease locally behind the facing due to the outward horizontal movement of the facing column during construction. As a result, the stress-dependent
hyperbolic model predicts smaller soil stiffness values behind the facing compared to the constant stiffness model. Therefore, the predicted strain magnitudes
at the reinforcement connections with the facing can
be expected to be greater (and hence more accurate)
using the hyperbolic model rather than the constant
stiffness (linear elastic) soil model.
Finally, the better match between the predicted and
measured wall response using back-fitted modulus
values from the measured load-settlement response of
the backfill in the actual physical tests highlights the
inability of conventional triaxial compression tests to
capture the backfill plane strain stiffness in the largescale wall tests.
5 CONCLUSIONS
1.0
Layer 3
0.5
0.0
1.0
Layer 2
0.5
0.0
1.2
0.8
0.4
0.0
Layer 1
0.0
0.5
1.0
Distance (m)
1.5
2.0
Figure 12. Comparison of predicted strain distributions at
end of construction using linear elastic and hyperbolic soil
models (Wall 2).
A numerical model has been developed using FLAC
to predict the measured response of carefully instrumented, large-scale geosynthetic reinforced soil modular block retaining walls during construction. The
numerical model accounts for staged construction of
the retaining walls and incremental lateral displacement of the modular facing using FISH functions.
Additional subroutines are included in the program to
model the backfill stress-dependent stiffness properties and the nonlinear reinforcement strain-dependent
axial stiffness.
The measured and numerical results for the construction stage of each wall showed satisfactory agreement for different response parameters including
facing displacements, reinforcement strains and history of toe forces. In particular, reinforcement strain
258
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-30.qxd 08/11/2003 20:38 PM Page 259
distributions using a hyperbolic soil model were found
to be in good agreement with the measured data.
ACKNOWLEDGEMENTS
The financial support for this study has been provided
by the Natural Sciences and Engineering Research
Council (NSERC) of Canada, 11 Departments of
Transportation in the USA, and grants from the
Department of National Defence of Canada.
REFERENCES
Allen, T.M., Bathurst, R.J. & Berg, R.R. 2002. Global Level
of Safety and Performance of Geosynthetic Walls: A
Historical Perspective. Geosynthetics International, (9):
395–450.
Allen, T.M., Bathurst, R.J., Lee, W.F., Holtz, R.D. & Walters,
D.L. 2003. A New Working Stress Method for Prediction
of Reinforcement Loads in Geosynthetic Walls, Canadian
Geotechnical Journal, (in press).
Bathurst R.J. & Hatami, K. 2001. Review of numerical modeling of geosynthetic reinforced-soil walls. Proc. 10th
Inter. Conf. Comp. Meth. Adv. Geomech. Invited Theme
Paper, Tucson, AZ, USA, January 2001: (2) 1223–1232.
Bathurst, R.J., Walters, D.L., Hatami, K. & Allen, T.M. 2001.
Full-scale performance testing and modeling of reinforced soil retaining walls. Special Lecture, IS-Kyushu
2001. Fukuoka, Japan, November 2001.
Duncan, J.M., Byrne, P., Wong, K.S. & Mabry, P. 1980.
Strength, stress-strain and bulk modulus parameters for
finite-element analysis of stresses and movements in soil
masses. Report No. UCB/GT/80-01. University of
California, Berkeley: Department of Civil Engineering.
Hatami, K. & Bathurst, R.J. 2001. Modeling static response
of a segmental geosynthetic reinforced soil retaining wall
using FLAC. Proc. 2nd Int. FLAC Symp. Numerical
Modeling in Geomechanics, Lyon, October 2001,
223–231.
Hatami, K. Blatz, J.A. & Bathurst, R.J. 2002. Numerical
modeling of geosynthetic reinforced soil retaining walls
and embankments. Proc. 2nd Can. Spec. Conf. Comp.
Appl. Geotech., Winnipeg, MB, Canada, April 2002.
Hatami, K. & Bathurst, R.J. 2002. Numerical simulation of
a segmental retaining wall under uniform surcharge loading. Proc. 55th Can. Geotech. Conf. Niagara Falls, ON,
Canada, October 2002.
Itasca Consulting Group, Inc. 1998. FLAC – Fast
Lagrangian Analysis of Continua, Ver. 3.40. Minneapolis,
MN: Itasca.
259
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-31.qxd 08/11/2003 20:39 PM Page 261
FLAC and Numerical Modeling in Geomechanics, Brummer et al. (eds)
© 2003 Swets & Zeitlinger, Lisse, ISBN 90 5809 581 9
Three-dimensional modeling of an excavation adjacent to a major structure
J.P. Hsi
SMEC Australia Pty Ltd, Sydney, Australia
M.A. Coulthard
M.A. Coulthard & Associates Pty Ltd, Melbourne, Australia
ABSTRACT: An excavation adjacent to a major bridge was carried out for the construction of a cut and cover
tunnel, Hawthorne Street Tunnel, as part of the South East Transit Project Section 2 in Brisbane, Australia. The
bridge was founded on shallow foundations whilst the excavation extended to below the foundation level. There
was limited tolerance for the bridge foundations to deflect resulting from the excavation, due to its structural
articulation. The support system for the excavation consisted of contiguous and scallop bored piles and ground
anchors. The excavation was carried out in stages taking advantage of the 3D effects to minimize ground deformation. To predict the ground performance during excavation and to optimize the design of the ground support,
FLAC3D was employed to simulate the 3D effects, the construction sequence and the soil-structure interaction.
Field monitoring results showed performance comparable with that predicted by FLAC3D.
1 INTRODUCTION
The South East Transit Project Section 2 (SETP2)
in Brisbane, Australia was recently constructed to provide a dedicated traffic corridor for public buses and
emergency services vehicles. The project route, of a
total length of 2.1 km, traversed well-developed areas,
which imposed significant constraints on the construction work.
One of the major challenges of the project was to
provide a design for a transport corridor that passes
through the inner urban zones of Brisbane, whilst minimizing the impact on adjacent properties, heavily trafficked arterial roads, public utility services and other
infrastructure. The design therefore made substantial
use of tunnels, bridges and retaining walls to minimize
such impacts.
A critical component of the project was to construct
a cut and cover tunnel, Hawthorne Street Tunnel,
below Hawthorne Street and closely adjacent to
Hawthorne Street Bridge, which was an important
bridge carrying through traffic between major roads.
The bridge was supported on shallow foundations and
was very sensitive to ground movement. Excavation
for the tunnel construction in close proximity to the
bridge was a major concern.
A robust support system for the excavation was
adopted to control ground movement and prevent
damage to the existing bridge. This system involved
installation of contiguous and scallop bored pile
walls. As the excavation proceeded ground anchors
were installed through the bored piles next to the
bridge abutment. The excavation was staged and the
bridge deflection was monitored to ensure that ground
movements fell within the design limit.
Due to the critical nature and complexity of the
work detailed numerical modeling using FLAC3D
(Itasca 1997) was carried out. The modeling considered the excavation and construction sequence, and
the interaction between the ground, the bridge foundations, the bored piles, and the ground anchors. An
optimized design of the support system was achieved
via the use of FLAC3D.
This paper presents the project overview, the construction constraints, the site geology, the design criteria, the work performance and, particularly, the
FLAC3D modeling.
2 PROJECT DESCRIPTION
The South East Transit Project (SETP), an initiative
of Queensland Department of Transport, was developed to provide a state-of-the-art busway for public
transport and emergency services vehicles. The route
stretches from Brisbane’s Central Business District to
Logan City, about 20 km to the south-east.
261
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-31.qxd 08/11/2003 20:39 PM Page 262
Figure 1. SETP2 route plan.
In December 1998 Thiess Contractors Pty Ltd was
appointed to design and construct a 2.1 km section of
the Busway from Water Street in Woolloongabba
to O’Keefe Street in Buranda, Brisbane. This section
of the Busway is known as South East Transit Project Section 2 (SETP2); its route plan is shown in
Figure 1. SMEC Australia Pty Ltd was appointed by
Thiess as the Principal Designer of the project to provide detailed design of all civil engineering works.
The SETP2 contract, valued at approximately
$A70 million, included the construction of three bus
stations, seven underpass structures, a 150 m long
cut and cover tunnel, a 230 m long driven tunnel, a
three span Super T bridge, and substantial retaining
structures.
Construction of the project commenced in April
1999 and was completed in November 2000. The Woolloongabba section of the project was completed in early
August 2000 in readiness for the Olympic events to be
held at the Woolloongabba Cricket Ground.
One of the fundamental challenges of the project
was to provide a design for a transport corridor that
passes through the inner urban zones of Brisbane,
whilst minimizing the impact on adjacent properties,
heavily trafficked arterial roads, public utility services and other infrastructure (including the Cleveland
Railway Line). The design therefore made substantial
use of tunnels, bridges and retaining walls to reduce
such impacts.
3 SITE GEOLOGY
3.1
General
The SETP2 busway route passes through several
geological formations, the oldest of which is the
Devonian-Carboniferous low grade metasediments
belonging to the Bunya Phyllites and Neranleigh
Fernvale Beds. These rocks are overlain by the
younger Tertiary volcanics of the Brisbane Tuff, and
the sedimentary rocks of the Tingalpa Formation. In
the northern part of the alignment the metasediments
of the Bunya Phyllites and Neranleigh Fernvale form
prominent topographic highs; the lows are generally
infilled with Quaternary alluvial deposits and some
fill. To the south the Brisbane Tuff trends north-east to
south-west adjacent to the Neranleigh Fernvale Beds,
both of which form undulating topographic highs.
The metasediments mainly comprise fine and
medium grained strongly foliated interbedded phyllites,
argillites and greywacke with some thin quartzites,
while the poorly bedded volcanics comprise welded
ash flow, bedded tuffs, and breccia with some interbedded conglomerate and sandstone. The Tertiary sedimentary rocks mainly consist of conglomerate and
sandstone.
During construction these rocks were found to be
mainly highly weathered or moderately weathered, of
very low to low strength, with extremely weathered
seams throughout. The extremely weathered seams
contained extremely to very low strength material.
Some slightly weathered rock was also encountered.
3.2
4 SITE CONDITIONS
The SEPT2 route intersected Hawthorne Street at an
angle of approximately 75° (see Figure 2). A cut and
cover tunnel (Figure 3) was proposed to be built
below Hawthorne Street to provide grade separated
through traffics. The construction of this cut and cover
tunnel was in the immediate proximity of the existing
Hawthorne Street Bridge, which is a four lane, single
span arch bridge supported on a strip footing at each
abutment.
Excavation for the cut and cover tunnel might
cause movement of the foundation resulting in damage to the bridge structure. Structural analysis of
Hawthorne Street Bridge indicated that the structure
was very sensitive to any movement, as the bridge had
a hinged mid-span, and therefore was held up by the
horizontal support at the foundation level.
262
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
Hawthorne Street tunnel site
The area is underlain by Bunya Phyllite Formation
comprising weathered fine grained phyllite. The soil
profile consists of residual soil described as sandy
silty clay and gravelly clay overlain by topsoil or a thin
layer of fill in parts. The residual soil thins towards the
south and west as the thickness of extremely and highly
weathered rock increases. Moderately weathered rock
was expected near the design level of the busway on
the north-east side of Hawthorne Street Bridge but
was expected to dip below this level towards the south
and west. This change in level of moderately weathered
rock is related to the contact with Brisbane Tuff about
15 m south of Hawthorne Street. The groundwater had
been measured about 1 m below the busway design
level.
09069-31.qxd 08/11/2003 20:39 PM Page 263
Figure 2. Site plan.
Figure 3. Site elevation.
A horizontal movement of the footing of 10 mm
would result in a mid-span vertical movement of
approximately 18 mm. Damage to the bridge structure was expected to occur should the foundation
movement exceed 10 mm in the horizontal direction.
The design of the support system therefore adopted a
maximum lateral movement of the bridge foundation
of 5 mm for conservative reasons.
5 STRUCTURAL SYSTEM
The structural system for the cut and cover tunnel
consisted of contiguous and scallop pile walls and a
pre-stress concrete plank roof with a reinforced concrete deck slab on top. The planks were placed on
a slope to match the slope of Hawthorne Street to
reduce the amount of fill on top thereby reducing the
263
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-31.qxd 08/11/2003 20:39 PM Page 264
structural depth required. Fill has been maintained on
the structure for the location of services.
The western bored piles are located very close to
the existing abutment of the Hawthorne Street
Bridge. Each of the piles next to the bridge was to be
fitted with permanent ground anchors to maintain the
required horizontal bearing pressure and reduce foundation movements for the Hawthorne Street Bridge.
Utilizing permanent ground anchors, the anchors can
be stressed to counteract any predicted movement,
and re-stressed if the measured movement is greater
than that predicted.
The eastern wall consisted of 0.9 m diameter piles at
1.5 m c/c spacing whilst the western wall comprised
1.2 m diameter piles at 1.77 m c/c spacing, except for
the section within 3 m from the existing bridge foundation where the piles were at 1.25 m c/c spacing. All
the piles were socketed 0.5 m into slightly weathered
phyllite. The gaps between the piles were shotcreted
with fibrecrete. Two VSL permanent ground anchors
were installed on each of the piles adjacent to the bridge
abutment. Each anchor was socketed 10 m into slightly
weathered phyllite and prestressed to 1000 kN.
During construction the horizontal movement of
the abutment and vertical mid-span movement of the
bridge were monitored. The measurements were compared to the estimated values and adjustments made
to the construction method and program if required.
Temporary struts and hydraulic jacks were specified
as part of the contingency plan to help control pile
movement at the most critical section.
6 CONSTRUCTION SEQUENCE
To minimize ground movement associated with the
construction work, excavation was carried out in
stages, as follows:
1. Constructed bored pile walls and headstocks.
2. Installed instruments, with minimum accuracy of
1 mm, for monitoring deflection of headstocks,
and abutments and mid-span joints of Hawthorne
Street Bridge.
3. Undertook baseline readings of the instruments
without live load on the bridge and at relatively
similar climatic temperature during construction.
4. Excavated southern half of the tunnel to the level
of the first (upper) row of ground anchors, with
fibrecrete applied between piles progressively.
5. Installed and stressed the first (upper) row of round
anchors on the western wall of the southern half
of the tunnel.
6. As for 4, but for northern half of the tunnel.
7. As for 5, but for northern half of the tunnel.
8. Excavated southern half of the tunnel to the level
of second (lower) row of ground anchors with
fibrecrete applied between piles progressively.
9. Installed and stressed the second (lower) row of
ground anchors on the western wall of the southern half of the tunnel.
10. As for 8, but for northern half of the tunnel.
11. As for 9, but for northern half of the tunnel.
12. Excavated to the tunnel floor level.
13. Installed the pre-stressed concrete planks over
the headstocks.
14. Constructed cast in situ concrete slab over the
tunnel floor.
15. Took deflection measurements frequently during the above construction stages with record of
corresponding temperature and time.
16. At any time if the measured lateral deflection
of the bridge foundation was greater than 5 mm,
contingency measures including further stressing
the ground anchors would be implemented.
7 NUMERICAL MODELING
7.1
The complex three-dimensional nature of the problem and the need to allow for possible yield of the
various rock units and to account for a range of structural elements suggested that FLAC3D would be well
suited to the modeling. The work was performed in
1999, using version 2.0 of that program.
The existing bridge was included only as a loaded
foundation on one side of the new tunnel then the
construction sequence outlined above was represented in the numerical model. Coding in the in-built
programming language FISH was used to manage
grid generation, excavation stages, installation and
linking of piles, struts, crossbeams and anchors, and
many other aspects of the modeling. The task of
development and testing would have been much more
difficult without this powerful feature.
7.2
Geotechnical model
The geotechnical model adopted for the numerical
modeling included the subsurface stratigraphy and
geotechnical parameters. Boreholes in this area indicated that the subsurface consisted of residual soils
to 5–6 m depth underlain by extremely to highly weathered (EW/HW) phyllite to depths ranging from 9 m
near the eastern wall to 12 m near the western wall, overlying moderately weathered (MW) phyllite. Slightly
weathered (SW) phyllite occurred at depths between
14 m at the eastern wall and 16 m at the western wall.
A uniform subsurface profile based on the more
critical profile on the western side of the excavation
was assumed and the Mohr-Coulomb soil/rock constitutive model was adopted for each rock and soil
unit. The assumed geotechnical model and material
264
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
Approach
09069-31.qxd 08/11/2003 20:39 PM Page 265
parameters are given in Table 1. The tensile strength
for each rock unit was taken to be 25% of the cohesion, and zero for the soil.
In situ horizontal stresses were assumed to be half
the vertical in the soil layer and equal to the vertical in
the rock units, where an initial approximation to the
vertical stress was computed from the above layering
and densities.
7.3
Bridge footing
The Hawthorne Street Bridge was represented simply
via loads applied to the footing shown in the central part
of the grid in Figure 4. Two loading cases were considered, based on (a) SMEC’s independent structural
7.4
Table 1. Geotechnical model adopted for analysis.
Soil/Rock Depth t
c
E
Type
(m)
(kN/m3) (kPa) (deg.) (MPa)
Residual
EW/HW
MW
SW
0.35
0.30
0.25
0.20
0–6
6–12
12–16
16
18
20
22
25
10
500
750
2500
30
35
40
45
40
50
200
400
analysis of the existing bridge and (b) the bearing
pressure specified on the original bridge drawing.
Loading (a) was significantly smaller than (b), which
is understandable as the foundation pressure shown in
the drawing would generally include a factor of safety.
For prudent and conservative reasons, the design of the
supporting structures to the excavation was based on
case (b). The total applied vertical and horizontal loads
were 31.55 MN and 21.86 MN respectively, where the
horizontal load was taken to act in the direction of
the short axis of the footing, i.e. at 25° to the normal
to the busway walls. These loads were converted to
equivalent Cartesian stress components, which were
applied to the upper surface of the footing.
Retaining system
The retaining system consists of a line of piles on
each side of the busway and two rows of ground
anchors attached to the piles on the western side to
support the existing bridge footing. Temporary struts
on the northern half of the busway were also modeled
in some cases but proved to be ineffective.
The piles on the eastern side are 0.9 m diameter,
installed at 1.5 m center spacing. Those on the western
Figure 4. Rock units and zoning in inner section of FLAC3D grid, before tunnel construction.
265
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-31.qxd 08/11/2003 20:39 PM Page 266
Table 2. Piles (pile structural elements).
Parameter
Value
Young’s modulus
Poisson’s ratio
Density
Shear/normal coupling spring stiffness
Shear/normal coupling spring cohesion
Shear/normal coupling spring friction angle
31 GPa
0.2
2400 kg/m3
50 MPa
1 MN/m
30°
that a coarsely zoned region was attached at the base
of the finely-zoned part shown, to provide a better
representation of the rock mass response at depth.
7.6
The excavation and support sequence as modeled in
FLAC3D was as follows, where the computation was
stepped to equilibrium at each stage:
Table 3. Ground anchors (cable structural elements).
Parameter
8-strand 27-strand
Young’s modulus
Density
Tensile/compressive yield strength
Grout stiffness
Grout cohesive strength
Grout friction angle
200
7860
1.19
10
1.13
0°
200 GPa
7860 kg/m3
4.0 MN
9 GPa
1.7 MN/m
0°
side are of 1.2 m diameter, at 1.25 m c/c spacing adjacent to the nearest corner of the bridge footing and
1.77 m c/c away from that corner. All piles are socketed 0.5 m into SW phyllite.
The ground anchors for the tunnel as built are
8-strand cables of 15.2 mm diameter, installed in
0.145 m diameter holes and pre-tensioned to 1 MN
after installation. They dip at 45° and are socketed
10 m into SW phyllite but are ungrouted over the
remainder of their lengths. Other forms of anchor
were considered in several of the numerical models,
e.g. varying numbers of strand, hole diameter and
pre-tension force.
Non-geometric property values for the FLAC3D
structural elements representing the piles and ground
anchors, are given in Tables 2 and 3 respectively.
7.5
Finite difference grid
As shown in Figure 2, the tunnel was to run obliquely
under the existing bridge, with a bridge foundation
immediately adjacent. In addition, a soil slope around
the bridge foundation was to be replaced, as the tunnel was excavated, by a reverse-angle slope that was
not constant in profile along the excavation. The grid
was generated in sections, some of which had to be
joined via “attach” commands, then the entire model
was transformed to create the correct skew angle
between the bridge and tunnel. A view of the inner
part of the pre-construction grid is given in Figure 4.
The cut-and-cover tunnel was to be constructed
within the finer-zoned region to the left of, and parallel to, the slope shown in Figure 4. Note that the grid
did not conform precisely to the assumed horizontal
boundaries on either side of the MW rock unit, and
0. Apply boundary conditions to far boundaries
(fixed horizontal displacements on vertical sides
and fixed all displacement components on base),
initialize approximate in situ stresses, apply gravity and footing load.
1. Excavate entire busway to 3 m depth.
2. Install both sets of piles then excavate more distant
half of busway (relative to view in Figure 4) a further 3 m.
3. Install upper ground anchors, attached to piles
between previous excavation and bridge footing,
and excavate 2 m from nearer half of busway.
4. Install crossbeams along lines of piles and struts
across excavation (not in all models), and excavate more distant half of busway a further 3 m.
5. Install lower ground anchors attached to piles
between stage 2 excavation and bridge footing,
and excavate further 3 m from nearer half of
busway.
6. Remove struts (if installed at stage 4), install
upper ground anchors attached to piles between
stage 3 excavation and bridge footing, and excavate 2 m more from further half of busway.
7. Excavate another 2 m from nearer half of busway.
8. Install lower ground anchors attached to piles
between stage 3 excavation and bridge footing
and excavate final 1 m from nearer half of busway.
The final model configuration is shown in Figure 5,
where the view is as in Figure 4.
Implementation of this construction sequence in a
FLAC3D model was largely straightforward, with
FISH routines controlling the various excavation
stages and the placement of all types of structural elements. However, one aspect of the modeling proved
to be unexpectedly complex, viz. the setting of links
between the many structural nodes and rock zones or
other structural nodes.
The key constraint (D. Potyondy, private communication) is that each structural node in a FLAC3D
model can only be the source of one link. This link
may provide either a node-to-zone connection or a
node-to-node connection. This means that, where
cables or beams are linked to piles at sub-surface nodes,
then multiple nodes must be created to manage the
various links, and the direction of those links must
be carefully controlled. For example, creation of a pile
automatically creates links from each sub-surface
266
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
Modeling strategy
09069-31.qxd 08/11/2003 20:39 PM Page 267
Figure 5. Inner section of FLAC3D model, showing structural elements at completion of excavation and support.
structural node in the pile to the rock zone that contains it. If a ground anchor is to be connected to that
pile then the pile must be formed in such a way that
there is a node at the intended connection point.
When the ground anchor is created as a series of cable
elements, a duplicate node will exist at the same coordinates as the pile node to which it is to be connected.
By default, each cable node will also have a node-tozone link. These must be deleted at all nodes above the
grouted section of the cable, then a new node-to-node
link must be created, emanating from the node at the
top end of the cable and ending on the corresponding pile node (so that the pile node is the target of the
node-to-node link from the cable node and the source
of the node-to-zone link to the rock).
A similar procedure had to be implemented to handle links between piles and crossbeams and between
crossbeams and struts, in cases where the latter were
modeled. In that case, it was critical that the final set
of links be ordered thus: strut node → beam node →
pile node → zone. Rigid links were used for all connections between structural elements.
Further, when structural elements were deleted
from a model, such as when struts were removed at
computational stage 6 above, then the links from the
associated structural nodes were not automatically
deleted by FLAC3D; this also had to be done explicitly
in the data and FISH files.
A final complication arose from the fact that multiple links at a point in space can only be distinguished via the link number that is set within FLAC3D
when each particular link is created. Management of
the links therefore required careful monitoring of the
numbers of active structural nodes, elements and
links and the highest id number for each. Again, this
was handled effectively using FISH coding.
7.7
After a great deal of development and testing several
production analyses were performed. As indicated in
section 7.4 above, temporary struts were predicted
not to be effective, so the final analyses only included
piles and ground anchors, thus:
– bbhsu9c: 8-strand cables with 1 MN pre-tension;
case (a) footing loading from section 7.3;
– bbhsu9d: as for 9c except for higher case(b) footing loading;
– bbhsu9e: as for 9d except 27-strand cables with
3 MN pre-tension.
267
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
Cases modeled
09069-31.qxd 08/11/2003 20:39 PM Page 268
Figure 6. Induced horizontal displacements in footing at end of construction, from run bbhsu9d (upper plot) and bbhsu9e
(lower plot). Piles and ground anchors are shown as solid and dashed lines respectively; busway is to left of piles.
Figure 6 shows the predicted horizontal displacements of the bridge footing at the end of runs 9d and 9e
respectively. These results suggested that the heavier
ground anchors, with 3 MN pre-tension, would actually
pull the footing away from the busway excavation,
i.e. they would overdo the support. In contrast, the
anchors in model 9d allowed the footing to relax
towards the excavation, but the maximum horizontal
displacement was constrained to be less than 5 mm,
as required. Histories of x-, y- and z-components of
268
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-31.qxd 08/11/2003 20:39 PM Page 269
Figure 7. Histories of induced x-, y- and z-displacements at two points on footing, during the stages of construction, as
computed in model bbhsu9d.
Figure 8. Axial forces in one set of ground anchors at end of construction, as computed in model bbhsu9d.
displacement of several points on the footing, for the
same model 9d, showed that they would vary through
the various computational stages but were also always
predicted to be less than about 5 mm (see Fig. 7).
Some further representative results from run bbhsu9d
are presented and discussed below.
The axial forces acting within one set of ground
anchors at the completion of construction are shown
in Figure 8; the vertical axis represents the vertical
coordinate (RL) along the cables and the horizontal
axis the axial force (note that the sign convention for
forces in structural elements in FLAC3D depends
269
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-31.qxd 08/11/2003 20:39 PM Page 270
Figure 9. Axial forces in some of the piles on the footing side of the excavation, at the end of construction, as computed in
model bbhsu9d.
Figure 10. Moments (my – upper and mz – lower) in the same set of piles as in Figure 9.
270
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-31.qxd 08/11/2003 20:39 PM Page 271
upon the relative orientation of the nodes). In the
grouted (lower) section, the developed forces are
close to the pre-tension force of 1 MN but they are
about 8% smaller in the ungrouted (upper) section.
This is consistent with the response expected as the
system is re-equilibrated after pre-tensioning of the
anchors. Examples of forces and moments generated
in piles adjacent to the bridge footing are given in
Figures 9 and 10. In each case the vertical axis gives
the RL (z-coordinate) of pile elements and the horizontal axis the force or moment, in SI units. The axial
forces in Figure 9 clearly show the effects of the connection of ground anchors at two points in the upper
sections of some of the piles.
existing bridge were not disturbed. Analysis of the
bridge indicated that lateral displacements of the footing must be constrained not to exceed 5 mm. Program
FLAC3D was used to simulate the complex construction sequence, including the placement of piles and
ground anchors. FISH programming was used extensively to assist in generating the grid and in managing
the links between the various structural elements.
The results from a series of production analyses indicated that a design based on 8-strand ground anchors,
pre-tensioned to 1 MN, would be satisfactory. The
predictions of FLAC3D have been confirmed by monitoring during construction.
ACKNOWLEDGEMENTS
8 FIELD PERFORMANCE
During the entire excavation process the measured
lateral deflection of the abutment of Hawthorne
Street Bridge was less than 5 mm. There was no distress of Hawthorne Street Bridge during and after
construction of the Hawthorne Street Tunnel.
The authors wish to acknowledge many valuable
communications with Dr. D. Potyondy, Itasca, particularly about the linking of structural elements in
FLAC3D.
REFERENCES
9 SUMMARY
Design and construction of the section of the Brisbane
Busway had to ensure that the adjacent footings of an
Itasca Consulting Group, Inc. 1997. FLAC3D – Fast
Lagrangian Analysis of Continua in 3 Dimensions,
Version 2.0. Minneapolis, MN: Itasca.
271
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-32.qxd 08/11/2003 20:49 PM Page 273
FLAC and Numerical Modeling in Geomechanics, Brummer et al. (eds)
© 2003 Swets & Zeitlinger, Lisse, ISBN 90 5809 581 9
Pile installation using FLAC
A. Klar
Technion – Israel Institute of Technology, Haifa, Israel
I. Einav
Centre for Offshore Foundation Systems, UWA, Australia
ABSTRACT: This paper presents a numerical simulation of pile installation using FLAC. A new contact formulation between rigid and deformable bodies is employed. This formulation utilizes equations of motion to
describe the behavior of the deformable nodal point along the contact surface. Unlike FLAC’s own embedded
interface formulation, the new formulation does not encounter discontinuities problem along nonlinear or
piecewise linear surfaces.
1 INTRODUCTION
The evaluation of pile installation has great significant in design, for two main reasons:
1. In saturated clay soils, a considerable change in
pore pressure takes place due to the pile installation. This change of pore pressure and its subsequent dissipation process affect the pile capacity.
2. Simulation of pile installation allows for more
accurate evaluation of the end bearing capacity.
Over the last three decades, the problem of pile
installation has been extensively researched by different analytical/numerical methods. These methods can
be, generally, categorized into five groups:
1.
2.
3.
4.
5.
Limit analysis approach,
cavity expansion solution,
strain path method,
Eulerian large strain finite element analysis, and
Lagrangian large strain analysis.
The problem of pile installation is strongly related to
the problem of cone penetration. As a result, advances
in understanding were, and still are, strongly connected
to research of cone penetrations.
In the present work, simulation of pile installation
is presented using the Lagrangian large strain analysis
code FLAC. To understand the importance of using
Lagrangian analysis, the following section overviews
the different methods and their limitations.
Since the problem of pile installation involves
interaction between two bodies (pile and soil), there is
a need to employ some kind of interface formulation.
FLAC’s own interface formulation is associated with
undesirable behaviors, especially along nonlinear
convex surfaces. As a result, an alternative and simple
approach is suggested.
2 REVIEW OF METHODS
Generally, it may be said that five numerical/analytical methods exist for the evaluation of pore-pressure
generation and/or end bearing capacity:
2.1
2.2
Cavity expansion solutions
In this group, the stresses along the pile are related to
solutions of cavity expansion. It is commonly assumed
that the solution of cylindrical cavity expansion may
represent the deformations and stresses along points,
which are far from the end of the pile, and that solution of spherical cavity expansion may be used for
approximation of field quantities near the pile lower
tip. Figure 1 shows the different zones. Zone II and III
273
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
Limit analysis approach
This group of methods includes lower bound solution
(or slip line method), upper bound solution and limit
equilibrium analysis. Results obtained by this approach
correspond to collapse mechanism. In these methods
only the strength parameters of the soil are introduced;
i.e. the stiffness of the soil has no influence on the
results. One may refer to Durgunoglu & Mitchell
(1975) for some examples of failure mechanisms.
09069-32.qxd 08/11/2003 20:49 PM Page 274
are the ones that may be represented by the cavity
expansion solutions. The behavior in Zone I is highly
affected by the soil surface. One of the purposes of
the work presented here is to evaluate the surface
effect on the solution, and to discover the required
depth for which the evolution of the end bearing
capacity factor Nc is redundant. To learn more about
the use of cavity expansions in the solution of pile and
cone penetration, one may refer to the excellent book
by Yu (2000).
2.3
Large strain Lagrangian finite element
analysis
This method is the one employed in FLAC, in which
the mesh is updated throughout the pile penetration
process. This method is the only one that in theory can
capture the installation process as it is, while including
the influence of both soil surface and changing properties with depth. It should be noted, however, that this
method is associated with numerous numerical problems, when simulating pile or cone penetrations, due
to the great deformations involved in the problem.
Strain path method
The strain path method was first suggested by Baligh
(1985). In this method, a flow field of soil is assumed
to exist around the pile. From this assumed flow field,
strains are derived, while stresses can then be determined according to a particular constitutive relation.
Two main drawbacks are associated with this method:
(a) equilibrium will not necessarily exist, and (b) the
effect of the surface and/or changing properties with
depth cannot be included, i.e. it can represent only
deep steady penetrations. The first limitation may be
partly overcome by the use of the iterative procedures
suggested by Teh & Houlsby (1988).
2.4
2.5
Large strain Eulerian finite element analysis
At this current stage, if one chooses to utilize FLAC’s
embedded interface formulation to simulate the soilpile contact, he should acknowledge that on top of the
problems due to the great deformations, he introduces
new problem. As in many other codes, in FLAC’s interface formulation the two bodies are prevented from
crossing each other. This leads to discontinuities in the
contact between the bodies (Itasca 2000), if nonlinear or
piecewise linear surfaces are involved. Figure 2 shows
an example of the problem for piecewise linear rigid
contact surface. In Figure 2a the contact formulation
corresponds to that of FLAC; i.e. it does not allow for
the deformable body (represented by the quadrilateral
elements) to overlap the rigid body (represented by the
thick black line), and therefore gaps between these two
are developed near discontinuity points along of the
rigid body. There are two kinds of gaps that may
develop between the rigid body and the deformable one.
The first kind, (noted as type I in Fig. 2), is a gap that
will always result when the deformable body is in contact with a concave surface of a rigid body, and is fictional because the lamped grid points are still in contact.
The second kind (noted as type II in Fig. 2) is true gap
associated with zero forces acting on the grid points.
Zone III
Zone II
Zone I
In the Eulerian large strain finite element analysis, the
material (soil) streams through fixed points in space
[e.g. van den Berg 1994]. This method possesses the
same limitation of the last methods; i.e. inability to
model the soil free surface.
3 PENETRATION DIFFCULTIES IN FLAC
Figure 1. Cavity expansion zones along the pile.
Figure 2. Contact problems along piecewise linear surface.
274
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-32.qxd 08/11/2003 20:49 PM Page 275
This behavior, shown in Fig. 2(a) for piecewise linear surface, will be more pronounced in nonlinear surfaces, since, at least, every second grid point will be
out of contact with the rigid body in a convex surfaces.
To overcome this problem of undesirable gaps, the
contact formulation must allow the deformable body
to overlap the rigid body, as shown in Figure 2b. In this
“overlapping” formulation, the grid points, from
which the strain increments are derived, travel along
the rigid body surface, unless some sort of contact
logic that allows separation is included. In the following section, such a contact formulation is presented,
and is used later for the analysis of pile installation.
4 NEW CONTACT FORMULATION
FOR FLAC
defined in the fixed coordinate system. If considering
the moving coordinate system then the deformable
body motion is defined by a velocity vector of
vL vD vR and acceleration vector of aL aD aR.
Note the rigid body is stationary in the moving coordinate system. Figure 3 shows velocity and acceleration
diagrams of a grid point located on the rigid body. This
body can be represented by a shape function x f (z)
(x and z are the coordinates of the moving system).
Since the deformable body cannot enter the rigid
body nor departure from it (unless tensile failure is considered as will be discussed later) the motion of it can
only be tangential to the rigid body; i.e. only the tangential components of both velocity vector and acceleration
need to be introduced in to the equations of motion. If
we consider an explicit time marching numerical
scheme, the following expression can be written:
The following contact formulation is applicable to the
interaction between rigid and deformable bodies. In
general, both the rigid and the deformable bodies are
free to move in space. In the present formulation the
rigid body motion is prescribed. However, it can easily
be extended to a more general case where the motion
of the rigid body is determined by the solution of its
motion equations; this feature is studied these days
and is being employed for the simulation of anchor
installation. In the most degenerate way, the present
formulation can also be used to create roller fixing in
an inclined angle; an option that is absent from FLAC.
4.1
(1)
Formulation
A body may be defined as rigid if the distance between
any two points of it is constant with time. The motion
of a non-rotating rigid body can be described by two
components, a velocity vector, vR and an acceleration
vector aR. The motion of each lumped mass located on
a grid point that represents the deformable body can
also be described by two vectors, vD and aD for velocity and acceleration respectively. vD and aD are here
Velocity Diagram
where v Lx, vLzand aLx, aLzare the components of velocity and acceleration vectors in the moving coordinate
x
system (x, z) at time t. vxD, vDz , aD
, aDz , vxR, vRz , axR, azR
are the components of the motion vectors of the
deformable and rigid body in the fixed coordinate
system (x, z) at time t. If the motion of the rigid body
is prescribed (i.e. know a priori) then the motion of
the deformable body in the fixed coordinate system is
as follows:
Acceleration Diagram
(2)
νR
Shape function X’ = f(Z’)
a
aL
R
νL
νD
aD
Z'
X'
Figure 3. Velocity and acceleration diagrams.
Note, that in explicit numerical scheme it is assumed
that state variable are frozen at each step (dt); i.e. for
each time step the rigid and deformable body are fixed
in space, and therefore, all values in the right side of
Equation 1 are known. The value of aD in Equation 1 is
obtained from the assumption that the deformable body
is not in contact with the rigid body; i.e. the acceleration is obtained from the forces acting on the grid point
due to the deformation of the deformable body. To
275
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-32.qxd 08/11/2003 20:49 PM Page 276
introduce some friction between the rigid and the
deformable body one can add frictional force in the
tangential direction and re-obtain from it the value of
aD. If a rigid-plastic tangential interface is desired then
one can define the friction forces direction simply
according to the relative velocity between the soil and
the pile. If an elastic plastic tangential interface is
desired a slightly more complicated formulation is
required. Since in the current paper only smooth piles
are considered, this kind of formulation is not presented, although written and verified by the writers.
To consider possible separation between the rigid
body and the deformable body, a contact logic must
be introduced. If, for example, the contact logic considers zero tensile forces between the rigid and the
deformable bodies as condition for separation, then it
will occur once 180 a a. Whenever this
condition is satisfied, the grid point is solved according to aD; i.e. vD(t dt) vD(t) aD(t)dt. If during
one of the following steps the grid point comes
in contact with the rigid body, Equations 1 & 2 are
applied. Some small changes need to be introduced
into Equation 1 if it is desired to apply one of FLAC’s
damping schemes which operates on grid points mass.
If damping results only from the constitutive model,
then Equation 1 is satisfactory. One may refer to
Einav & Klar (2003) where the above formulation is
extended to a more general case of three-dimensional
rotating rigid-deformable bodies in space.
The described procedure is easily implemented in
FLAC using a FISH function, which is called during
each of the calculation cycles. Generally, since the
motion of the contact grid points is solved independently (i.e. using Equations 1 & 2 rather than by FLAC),
they need to be fixed in both directions. Quantities
related to aD are extracted from FLAC’s gridpoint variable xforce and yforce. Quantities related to velocities,
both readable and writeable, are manipulated using
FLAC’s gridpoint variable xvel and yvel.
5.2
Assumptions
The numerical analysis was conducted under the following assumptions:
1. The material behaves elastic perfectly plastic and
satisfies the von-Mises failure criteria. Since the
analysis is associated with undrained loading, and
the volumetric stresses are decoupled from the
deviatoric ones in the considered constitutive
model, it is possible to perform a “Dry” simulation;
i.e. to obtain the excess pore pressure value using
Skempton’s parameter, B 1 1/(1 (Kw/n)/ Ks),
utilizing the formula u B(ii ii0 )/3, where
the superscript 0 denotes initial state.
2. The undrained strength of the soil is defined
according to the relation Cu 0.25v0 OCR0.95,
v0 is the initial vertical effective stress and OCR
is the over consolidation ratio.
3. The shear modulus is taken proportional to the
undrained strength Cu, and the bulk modulus was
high enough so the material can be considered as
incompressible.
4. The analysis presented herein considered a constant OCR with value that equals 2.
5. Initial stress condition corresponded to K0 of 0.7.
6. To avoid the kinematic constrains of a fixed boundary, and to allow approximate simulation of an infinite soil layer, a prescribed boundary condition was
applied to the outer radius of the grid. The boundary
condition corresponded to the cylindrical cavity
expansion solution of an incompressible elastic
material; i.e. the external pressure acting on the mesh
was defined by the analytical solution of the internal
5 NUMERICAL ANALYSIS
5.1
Pile shape
In the present numerical analysis the pile tip is represented by a continuous nonlinear shape function
according to the following expression:
(3)
where r0 is the radius of the pile and and bc are
parameters that define the shape of the pile tip. Figure 4
shows three examples of tip shapes once is set to
give 95% of r0 at z 3r0. Due to space limitation, in
the current paper we present results only for pile tip
with bc equal to 2.
bc = 1
Figure 4. Different pile tip shapes.
276
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
bc = 2
bc = 3
09069-32.qxd 08/11/2003 20:49 PM Page 277
pressure of cavity expansion with an identical radius
to that of the outer boundary. It was verified that the
plastic zone did not reach the outer boundary, thus
the elastic cavity expansion solution was suited.
6 RESULTS
As discussed in section 2, only Lagrangian large
strain analyses can simulate the penetration of the pile
through the surface, and therefore are the only ones
that can evaluate the influence of the surface on the
cone penetration. Figure 9 shows the cone resistance
factor, Nc, for different rigidity indexes (G/Cu). The
Nc factor was calculated according to:
Figure 5 shows typical distortion of the mesh associated with steady penetration of the pile. It should be
noted that analyses with much coarser mesh resulted
with almost identical stress distributions and response,
and that it was impossible for the pile to penetrate the
surface without causing a bad geometry, unless more
coarser mesh, than that shown in Figure 5, was prescribed near the soil surface. As a rough rule of a thumb,
it was found that a contact soil element near the surface
should have a radial dimension of about one pile radius,
and this can be rapidly become finer as elements are
deeper. Figure 6 shows normalized excess pore pressure
associated with the state of Figure 5.
Figure 7 shows the development of excess pore pressure at depth of 25 radiuses for different radial distances
(xi is the initial distance from the axis-symmetric line).
Figure 8 shows the changes of the second invariant of
the stress during the installation of the pile for points
located a depth of 25 radiuses. The y-axis is normalized
such that it gives maximum value of one, in accordance
to the von-Mises yield surface radius. Initial K0 conditions create initial value that is different than zero.
Clearly, as the tip advances towards the checkpoints, the
value of the second invariant increases until failure is
reached; failure is reached quicker when the points are
closer to the axis.
(4)
Figure 6. Normalized excess pore pressures (G/Cu 100).
Figure 5. Distorted
(G/Cu 100).
mesh
in
steady
penetration
Figure 7. Development
(G/Cu 100).
277
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
of
excess
pore
pressure
09069-32.qxd 08/11/2003 20:49 PM Page 278
J2D0.5/(2/30.5Cu)
1.2
xi/r0=0.31
xi/r0=1.0
xi/r0=1.65
xi/r0=3.15
xi/r0=5.5
xi/r0=10.5
0.8
smaller than any reasonable slenderness ratio (L/D)
associated with piles foundations. However, for
G/Cu 100 the normalized steady state depth
becomes in the same order of the piles slenderness
ratios. For example, for G/Cu 1118 the pile slenderness ratio must be greater than 25 in order for the
soil surface to have no effect. In case the pile slenderness is smaller than that value, the soil surface influences the Nc factor. In such case it is not legitimate to
use cavity expansion solutions for obtaining the Nc
factors, as they assume that there is no influence from
surface. The same may be regarded to the solutions
based on the strain path method, which also does not
consider the soil surface.
Points digned
with cone tip
0.4
0
0
10
20
Penetration/r0
30
40
Nc
Figure 8. Shear behavior (G/Cu) 100.
15
14
13
12
11
10
9
8
7
6
5
4
7 SUMMARY AND CONCLUSIONS
G/Cu=1118
G/Cu=500
D
Zc
G/Cu=223
G/Cu=100
G/Cu=44.7
G/Cu=20
Steady state front
1
4
7 10 13 16 19 22 25 28 31 34 37 40
Zc/D
Figure 9. Development of Nc factor with depth.
where, Ftot is the total vertical force acting on the pile
(considering a smooth pile), v(Zc) is the total vertical stress at depth Zc, and defined as the distance
between the surface and the middle of the pile’s tip
(and in our shapes, 1.5r0 above its tip). Note that in
Figure 9 the horizontal axis Zc/D does not start at
zero. This is due to the fact that the cone must be
completely positioned inside the soil in order for the
Nc factor to have a proper meaning, if it is obtained
from the net vertical force,
Fnet Nc · Cu · r20.
As can be seen from Figure 9, as the rigidity index
increases, both the Nc value and depth in which it
becomes constant increase. The dashed line in Figure 9
represents a required depth to obtain 95% of the maximum Nc values. This depth is referred herein as the
depth of the steady state front, Zss. It is obvious from
Figure 9 that Zone III (see Fig. 3) can be associated
with spherical cavity expansion solution, as was suggested by Yu (2000), only if some minimal pile slenderness ratio (L/D) is satisfied. It seems that for piles
installed in soil with rigidity G/Cu 100 the requirements for minimum slenderness are irrelevant, since
the normalized steady state penetration depth is
A contact formulation for interaction between rigid and
deformable bodies is presented. This approach overcomes some of the problems associated with FLAC’s
own built-in interface formulation when it is applied to
nonlinear or piecewise linear surfaces. The proposed
formulation can easily be used to create rolling fixing
along any line inclination, an option that is currently
absent from FLAC. The contact formulation is
employed in the large strain simulation of pile installation. A study on the generation of pore pressures and on
surface effects is presented. There is a strong indication
from the analysis results, that the use of cavity expansion or strain path method solutions should be carefully
examined before employed in the estimation of end
bearing capacity, specially for low slenderness driven
piles in soils with high rigidity index.
REFERENCES
Baligh, M.M. 1985. Strain path method, J. Soil Mech. and
Found. Div., ASCE, 111(9): 1108–1136.
Durgunoglu, H.T. & Mitchell, J.K. 1975. Static Penetration
Resistance of soil, I: Analysis. Proc. ASCE Spec. Conf. on
In Situ Measurement of Soil Properties, New York, Vol. 1
151–171.
Einav, I & Klar, A. 2003. An approach for nonlinear contact
surface analysis and application to pile installation. BGA
Int. Conf. On Foundations: “Innovations, Observations,
Design and Practice”, Dundee, Scotland, Sept 2003.
Itasca Consulting Group, Inc. 2000. FLAC (Fast Lagrangian
Analysis of Continua) Ver. 4.0 User’s Manual, Minneapolis Minnesota: Itasca.
Teh, C.I. & Houlsby, G.T. 1988. Analysis of the Cone
Penetration Test by the Strain Path Method. Proceedings
of the 6th International Conference on Numerical and
Analytical Methods in Geomechanics, Innsbruck, April,
Vol. 1, ISBN 90-6191-810-3, pp 397–402.
van den Berg P. 1994. Analysis of soil penetration. Ph.D. thesis. The Netherlands: Delft University Press.
Yu, H.S. 2000. Cavity Expansion Methods in Geomechanics.
London: Kluwer Academic Publisher.
278
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-33.qxd 08/11/2003 20:51 PM Page 279
FLAC and Numerical Modeling in Geomechanics, Brummer et al. (eds)
© 2003 Swets & Zeitlinger, Lisse, ISBN 90 5809 581 9
Axial tension development in the liner of a proposed Cedar Hills regional
municipal solid waste landfill expansion
F. Ma
Washington State Department of Ecology Solid Waste Program, Eastern Regional Office, Washington, USA
ABSTRACT: A finite difference analysis using the computer code FLAC was conducted of a municipal landfill expansion proposal at the Cedar Hills Regional Landfill (CHRL), King County, Washington State. The main
objective of the modeling efforts was to assess whether a standard design of a liner system would be adequate
to withstand typical loading conditions for municipal solid waste landfills. The loading conditions were: (1) the
gradual layered waste dumping up to 38 m (125) over the High Density Polyethylene (HDPE) liner; (2) dynamic
loadings caused by a shallow earthquake and a deep subduction zone earthquake; and (3) the simulation of a
cavity development in the old existing waste underneath the HDPE liner due to collapsing of some bulky items.
The FLAC (2D) analyses have revealed (1) the developments of the axial tensile stress and displacement in the
HDPE liner; (2) the stress and deformation developments in the municipal solid wastes; and, (3) the accumulative
and separate developments of stress and displacement of the landfill system under waste dumping, earthquakes
and cavity collapsing. The main conclusion was that the maximum axial tension in the 60 mil HDPE liner is higher
than the yielding strength of a GSE 60 mil HDPE liner (HDR/Golder 2001) under the proposed site, operational
and loading conditions. Thus some local reinforcement or stronger geomembrane liners will be needed.
1 INTRODUCTION
A finite difference analysis using the computer code
FLAC (Fast Lagrangian Analysis of Continua) was
conducted of a municipal solid waste landfill expansion
proposal at the Cedar Hills Regional Landfill (CHRL),
King County, Washington State. The work was done
to independently verify FLAC modeling conducted
by King County Solid Waste Division’s Consultant
HDR/Golder (2001). The main focus of the analyses
was to predict axial tensions that could develop in the
60 mil HDPE geomembrane liner sandwiched between
existing wastes and a future 38 m (125 foot) high waste
pile. The analyses involved three loading conditions:
1986 lacked a bottom liner (Fig. 1). A portion of the
proposed expansion at the CHRL will be located over
the existing wastes. This portion of the expansion footprint was called liner-over-refuse (HDR/Golder 2001,
Fig. 1). The largest axial stresses were expected to
develop in the liner-over-refuse area due to anticipated
excessive overall and differential settlements of the
underlying wastes. The remainder of the expansion will
be founded on a highly competent glacial till subgrade
where settlements of the liner are anticipated to be
minimal and thus settlement induced tensile stresses
would not be of concern.
1. the future emplacement of wastes;
2. earthquakes; and
3. a cavity opening up in the existing waste at a shallow depth below the proposed liner due to the collapsing of some bulky items.
2 SITE CONDITIONS
Landfilling commenced at the CHRL site in the
early 60s. Those portions of the landfill started before
Figure 1. Cross section of the landfill including location of
existing wastes, liner, new wastes to be disposed and foundation soil.
279
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-33.qxd 08/11/2003 20:51 PM Page 280
3 MODEL CONFIGURATIONS
Table 1. Stiffness of existing waste*.
3.1
Distance from left
boundary of the
model
m (ft)
Shear modulus
G
kPa (psi)
Bulk modulus
K
kPa (psi)
0–73
73–88
88–104
104–119
119–134
134–149
149–165
165–180
180–195
195–210
210–226
226–241
241–256
256–271
271–287
287–293
1966.9
1985.5
1924.8
1829.0
1818.9
1737.5
1678.3
1562.1
1532.4
1590.9
1640.4
1684.7
1771.7
1948.3
2511.1
2670.3
5245.4
5294.4
5181.1
4877.4
4850.3
4633.4
4475.5
4165.6
4086.4
4242.3
3474.3
4492.6
4724.5
5196.0
6696.1
7120.8
Consultant’s study
HDR/Golder (2001) predicted the axial tension in the
geomembrane in the liner-over-refuse area using the
FLAC code. This tension was induced by the overall
settlement in the existing and future wastes. The geometry of the proposed landfill expansion was used in this
load Case 1 modeling. Load Cases 2 and 3, i.e. the axial
stresses induced by earthquake loading and the collapsing of a cavity in the existing waste, were analyzed
parametrically using the simplifying assumption of a
horizontally stratified site. The modeling assumed
a rectangular mesh. The effects of the simplifying
assumptions were unknown and were considered minor
and probably conservative. Therefore it is probably reasonable to consider the predictions for load Cases 2 and
3 as upper bounds of the field behavior of the geomembrane. This will be further evaluated later in the paper.
3.2
The new models
To further refine the understanding of the overall axial
stress in the liner-over-refuse and settlements of the
existing and future wastes, a single model (Fig. 1) is
used in these analyses for the three different stages of
loading as stated in the introduction. To make the
comparison easier, the properties of existing, new
wastes and interface used in the HDR/Golder (2001)
study were adopted.
i. The existing waste is modeled using FLAC’s MohrCoulomb option. Using the field measurement of
the existing waste, stiffness parameters were developed by HDR/Golder (2001) as shown in Table 1.
The relationship between unit weight and depth for
municipal solid waste by Kavazanjian et al. (1995)
is adopted. The friction angle of 35 degree is
assumed.
ii. The new waste is modeled using FLAC’s Modified
Cam-Clay option. The model parameters are elastic
shear modulus G 5.12 104 kPa (7430.6 psi),
maximum elastic bulk modulus Kmax 1.53 105 kPa (22222.2 psi), density a variable with
depth (Kavazanjian et al. 1995), slope of elastic
swelling liner 0.03, slope of normal consolidation line 0.13, frictional constant M 1.418,
preconsolidation pressure pc 71.8 kPa (10.4 psi),
reference pressure p1 71.8 kPa (10.4 psi), and
specific volume at reference pressure on normal
consolidation lien v 1.75.
iii. The 60 mil HDPE liner is connected with new
waste above and existing waste or foundation soil
below by FLAC interfaces. The interface allows the
relative slip movements between the liner and
wastes or foundation soil. The interface input parameters are normal stiffness kn 5.12 104 kPa
(285.2)
(287.9)
(281.7)
(265.2)
(263.7)
(251.9)
(243.4)
(226.5)
(222.2)
(230.7)
(237.9)
(244.3)
(256.9)
(282.5)
(364.1)
(387.2)
(760.6)
(767.7)
(751.3)
(707.2)
(703.3)
(671.8)
(649.0)
(604.0)
(592.5)
(615.1)
(634.3)
(651.4)
(685.0)
(753.4)
(970.9)
(1032.5)
* Note: the values are obtained and deduced from
HDR/Golder (2001).
(7430.6 psi), shear stiffness ks 2.26 105 kPa
(32777.8 psi), and friction angle 24°. The
60 mil HDPE liner is modeled with isotropicelastic beam segments; its material properties per
unit length are area A 1.524 mm (0.06 inch), and
elastic modulus 9.29 105 kPa (134722.2 psi) .
The unit weight of the 60 mil HDPE geomembrane
is 9.26 kN/m3 (59 pcf).
iv. The foundation layer was modeled using FLAC’s
Mohr-Coulomb option. The material parame-ters
are elastic shear modulus G 5.12 104 kPa
(7430.6 psi), bulk modulus Kmax 1.53 105 kPa
(22222.2 psi) and frictional angle 35 degree.
For static analyses, the left and right boundaries
are constrained from horizontal movements and the
bottom boundary is constrained from both horizontal
and vertical movements.
4 MODELING RESULTS
4.1
Case 1 loading from up to 38 m (125) of
solid waste
The increase of tensile forces in the geomembrane
in the liner-over-refuse area was modeled by simulating
the time-history of waste emplacement as a sequence of
some 3 m (10) thick layers. The axial stress in the linerover-refuse and the overall displacement in the solid
waste are shown in Figures 2 & 3, respectively.
280
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
(0–240)
(240–290)
(290–340)
(340–390)
(390–440)
(440–490)
(490–540)
(540–590)
(590–640)
(640–690)
(690–740)
(740–790)
(790–840)
(840–890)
(890–940)
(940–960)
09069-33.qxd 08/11/2003 20:51 PM Page 281
Figure 2. Distributions of axial tension in the geomembrane liner.
Figure 3. Vertical-displacement contour.
As shown in Figure 2, the maximum axial tensions
in the geomembrane liner are predicted to occur at the
left anchor trench (El 1 of Fig. 1) and the transition
area (El 75 of Fig. 1) between the liner-over-refuse
and regular liner. The axial tension for the portion of
liner bearing on the competent foundation is minimal.
The tension spike at the toe (El 75 of Fig. 1) of the
liner-over-refuse is likely caused by the slope transition form 5H : 1V to 3H : 1V.
Figure 3 shows that the center portion around the letter A of the new wastes physically displaced the most
at approximate 3 m (10).
4.2
Representative earthquakes, damping and
boundary conditions
The USGS Probabilistic Seismic Hazard Deaggregation website (USGS 1996 maps) identifies two sources
for the CHRLF site as the principal contributors to the
earthquake hazard. The sources are:
i. a crustal Moment Magnitude (Mw) 6.5–7.0 earthquake at a hypocentral distance within 20 km; and
ii. a subduction zone earthquake Mw 8.3–9.0 at a hypocentral distance of approximately 135 km.
The near field crustal earthquake has been associated
with the potential rupture of the Seattle fault; and, the
farther and larger quake represents an interface event
on the Cascadia Subduction Zone along the Pacific
Northwest Coast. In this analysis the near field quake
was represented by the velocity time-history derived
from the acceleration time-history recorded from
the M7.3 Landers earthquake on June 28, 1992 in
California (HDR/Golder 2001); and, the June 23, 2001
M7.9–8.4 Peru Earthquake was considered representative of the larger subduction earthquake. The acceleration time-history for this subduction earthquake was
Figure 4. Distributions of axial tension in the geomembrane liner due to static and dynamic loadings.
recorded at Moquegua, Peru, which is approximately
190 km southwest of the epicenter. The peak accelerations for the east-west and north-south time-histories
are approximately 30 and 20% g, respectively. These
accelerations fall within the ranges of predicted peak
accelerations (mean plus one standard deviation) from
attenuation relationships developed for the Pacific
Northwest (Crouse 1991, Youngs et al. 1997).
The Moquegua record was 200 seconds long. After
the first 120 seconds the shaking produced minimal
changes in axial tension. To facilitate further modeling, only the first 120 seconds of the record were used.
As the site is asymmetric and the plastic nature of the
wastes modeled, the time history was reversed (multiplied by 1) to account for directivity effects. Everything else remained the same. As the results showed
almost no impact, further analyses were done using
only the unmodified earthquake time history. Since
peak acceleration in the E-W direction is about 50%
higher that of the N-S direction, both records of the
Moquegua time history were used in the analyses.
Only 5% Raleigh damping is used for the dynamic
analyses. Before running the dynamic analyses, the
free field boundary condition of FLAC is applied to
the numerical model. Then, either a velocity-time or
acceleration-time history is applied from the bottom
of the numerical model.
4.3
Using the N-S record, the cumulative development of
axial tension from the dynamic loading on top of the
static results (Fig. 2) is summarized in Figure 4.
Under dynamic loading, axial tension increased
approximately 70% in the geomembrane in the lower
half of the liner-over-refuse segment, while the upper
half stayed almost the same. As a result the maximum
tension is predicted to shift to the break in slope (transition from the 5H : 1V to 3H : 1V grade). To further
illustrate this effect, the axial tension histories at
these two locations are shown in Figures 5 & 6.
The very different predicted responses of the two
locations are likely due to the different overburden
conditions, the slope or slope change of the liner, etc.
For example, the overburden for El 1 is only a couple
281
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
Dynamic analyses under the subduction 2001
Moquegua, Peru, earthquake time-histories
09069-33.qxd 08/11/2003 20:51 PM Page 282
Figure 7. Distributions of axial tension in the geomembrane liner due to static and dynamic loadings.
Figure 5. History of axial tension development in the linerover-refuse due to static and dynamic loadings at EL 75.
Figure 8. History of axial tension development in the linerover-refuse due to static and dynamic loadings at El 75.
Figure 6. History of axial tensions at EL 1 in response to
the static and dynamic loadings.
of meters; but El 75 is under approximately 23 m (75)
of solid waste and the slope of the liner at this location
changed from 5H : 1V to 3H : 1V. Thus, due to the
plastic nature of the solid wastes, as they were modeled by the Cam-Clay Elasto-Plasticity Model, the axial
tensions in El 75, were not released when the earthquake wave reversed its direction for the cases when
the ground accelerations were relatively large.
Similarly, the axial tensions predicted in the liner
from the Moquegua, Peru 2001, E-W acceleration
time history are summarized in Figures 7–9.
Figure 9. History of axial tension development in the linerover-refuse due to static and dynamic loadings at El 1.
As shown in Figures 7–9, the maximum axial
tension occurred at the same location but is projected
to be 70% larger when using the Moquegua, Peru
E-W acceleration record rather than the N-S record.
282
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-33.qxd 08/11/2003 20:51 PM Page 283
Figure 10. Predicted distribution of axial tension in the
geomembrane liner due to static and dynamic loadings.
Figure 12. History of axial tension development in the
liner-over-refuse due to static and dynamic loadings at EL 1.
Figure 11. History of axial tension development in the linerover-refuse due to static and dynamic loadings at EL 75.
The increase reflects the larger peak ground acceleration of the E-W record.
4.4
Dynamic analyses using the 1995 Landers,
California, earthquake
The cumulative development of axial tension on top
of the static results (Fig. 2) in the liner from the 1995
Landers quake is summarized in Figure 10. Similarly
the axial tension history at the two locations of El 1
and El 75 are shown in Figures 11 & 12.
4.5
Loading from a cavity collapsing in
the existing wastes
Since local different settlement can be very detrimental to the integrity of liner system, the effects of a void
in the waste caused by deterioration of a large metallic
object were investigated. Although the existing waste
is covered by a 4- to 7-foot-thick interim soil cover, a
geophysical survey was conducted and did not indicate any large metallic objects at depths down to about
10 feet. However, it is theoretically possible that collapse of such a void could cause a potential local settlement up to 0.9 m (3) (HDR/Golder 2001). It is
more likely that a collapsing bulky item would cause
a local settlement up-to 0.9 m (3) after an earthquake. Such localized collapsed items were assumed
to occur at varying depths below the geomembrane in
the liner-over-refuse area. The worst case scenario was
assumed to be the collapse of the cavity following a
major earthquake. Therefore, the local settlement in
the old wastes was modeled after the dynamic analyses,
i.e. after subjecting the model to the E-W Moquegua
acceleration time-history. The original wastes are
scheduled to be capped with a minimum of 3 m (10)
of sand to act as a cushion. Thus, the cavity was placed
at a minimum 3 m (10) below the liner. Cavities were
simulated at greater depths in the existing waste at
locations below the upper-middle part of the linerover-refuse as pointed in the Case B of Figure 13.
However, the maximum tensile stress in the geomembrane resulted from the shallowest assumed cavity
position. Thus, the results of the deeper cavities were
not included here. Also, since the cavity collapsing was
stress-controlled, the deformation at locations A, B and
C in Figure 13 were only approximately 0.9 m (3).
This deficiency would not have substantial impact on
the results summarized in Figure 13.
In Figure 13 as the location of the cavity changes
from the toe of the existing waste (Case A) to the middle of the waste (Case B), the predicted axial tensions
increase above the void by 3114 to 4448 N (700 to
1000 lbs). When the void was placed near the top of
the slope (Case C of Fig. 13), the axial tension instead
decreased by approximately one half of the original
value. The reason for the decrease was that the void
caused the anchor trench of the liner to move toward
the collapsed hole and therefore relaxed the axial tension in the liner. Figure 13 shows that the maximum
accumulated axial tension from the three loading scenarios will occur near the toe of the existing waste
283
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-33.qxd 08/11/2003 20:51 PM Page 284
Table 2. Maximum tensions in the geomembrane liner
from FLAC models.
Static
Case tension
No. N (lb)
Dynamic
tension
N (lb)
Cavity
tension
N (lb)
Total
tension
N (lb)
11
12
13
204
5175(1165)1
3038(683)2
3519(791)3
890(200)
108(24)
N/A
N/A
4448(1000)
8301 (1867)
6056 (1361)
6537 (1469)
8231 (1850)
3018(678)
3018(678)
3018(678)
2893(650)
1
Note: Modeling results using Moquegua, Peru E-W
Acc.-time history;
2
Note: Modeling results using Moquegua, Peru E-W
Acc.-time history;
3
Note: Modeling results using Landers, California
Vel.-time history; and
4
Note: Modeling results recommended for 100-foot-wide
transition zone along lower edge of liner-over-refuse area
(HDR/Golder, 2001) using Landers, California Vel.-time
history and based on simplified assumption.
Figure 13. Predicted axial tension in the geomembrane
liner due to a cavity collapsing variously at locations A, B
and C at a depth of 3 m (10) under the liner in addition to
static and dynamic loadings.
and the maximum axial tension in the geomembrane
was only slightly impacted by the location of the collapsed void as in Case A of Fig. 13.
5 COMPARING CURRENT PREDICTIONS TO
THOSE OF MODELING BASED ON
SIMPLIFIED ASSUMPTIONS
(HDR/GOLDER, 2001)
The contributions to the maximum axial tension in
the geomembrane liner from the three loading scenarios by current and simplified models (HDR/Golder
2001) are compiled in Table 2.
Table 2 showed that the maximum tension at the
lower edge of liner-over-refuse based on current model
(Case 11) are very similar to that based on the simplified assumptions (Case 20, HDR/Golder 2001); and
the tension caused by the subduction Moquegua
quake represented by the E-W acceleration timehistory is about 50% larger than that based on the
crustal near field quake using the Landers velocity
time-history (Case 11 vs. 13).
CONCLUSIONS
First, the maximum axial tensions occur at different locations in the liner-over-refuse segment of the
geomembrane depending on the loading condition. The
maximum axial tension under three loading conditions
at El 75 is 8301 N (1867 lb) per foot. This is higher than
the yielding strength of 6938 N (1560 lb) per foot for
a GSE 60 mil HDPE liner (HDR/Golder 2001). Thus
some local reinforcement or stronger geomembrane
liners will be needed. Although the current modeling
results of maximum tensions are very similar to the
interpretations of the HDR/Golder’s work (2001), the
advantage of analyzing the three loading conditions
on the same numerical model is that it provides the
author with a clearer understanding of where and how
the axial tensions in the liner developed as the waste
pile rises and is subject to strong shaking and possibly
the development of shallow voids. At the same time it
also confirmed that the approach of superimposing
tensions from individual, simplified loading mechanisms (HDR/Golder 2001) can yield reasonable results
comparing with more complex modeling efforts.
Secondly, for locations like Cedar Hills in western
Washington State, both the crustal earthquake as represented by the Landers velocity records (HDR/Golder
2001); and, the subduction earthquake along the Pacific
Northwest Coast need to be considered, since the tension caused by the subduction quake (Moquegua E-W
acceleration time-history) was almost 50% larger than
that caused by the near field crustal quake (Table 2).
The selection of appropriate source zones is necessary
to envelop the likely seismic response. This process
is greatly aided by the USGS Probabilistic Seismic Hazard Deaggregation website. Further, the more
severe responses to the strong distant subduction
Moquegua E-W acceleration time-history may be due
to its low frequency and long duration. A similar phenomenon has been observed by Matasovic et al. (1998).
284
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-33.qxd 08/11/2003 20:51 PM Page 285
ACKNOWLEDGMENTS
The author wishes to sincerely thank the King County
Solid Waste Division (KCSWD) for its permission to
publish the paper. Special thanks to the reviews and
comments of Dr. Victor Okereke of KCSWD and
Mr. Frank Shuri of Golder Associates Inc. It is worth
noting that the current work is a follow up to the
HDR/Golder’s earlier work (HDR/Golder 2001).
Special thanks also to Mr. Jerald LaVassor of
Washington State Department of Ecology Water
Resources Program Dam Safety Section. The author is
indebted deeply to his direction, support and invaluable technical and editorial revisions of the paper.
REFERENCES
HDR Engineering, Inc. & Golder Associates Inc. 2001.
Cedar Hills Regional Landfill Area 6 Development Draft
Preliminary Design Technical Memorandum Lining System Over Unlined Waste Area. Seattle: King County
Department of Natural Resources Solid Waste Division,
Washington State.
Kavazanjian, E. Jr., Matasovic, N., Bonaparte, R. and
Schmertmann, G. R. 1995. Evaluation of MSW properties for Seismic Analysis. Geoenvironment 2000, ASCE
Geotech. Spec. Publ. No. 46, 2, 1126–1141.
Matasovic, N., Kavazanjian, E. Jr., and Anderson, R. 1998.
Performance of solid waste landfills in earthquakes,
Earthquake Spectra, Issue #2, Vol. 14, p. 319–334.
Youngs, R. R., Chiou, S.-J., Silva, W. J. and Humphrey, J. R.
1997. Strong Ground Motion Attenuation Relationships
for Subduction Zone Earthquakes. Seismological Research
Letters. Vol. 68, No. 1, Jan./Feb. 58–73.
USGS Probabilistic 1996. Seismic Hazard Deaggregation
website (http://eqint1.cr.usgs.gov/eq/html/deaggint.shtml).
Crouse, C. 1991. Ground-motion attenuation equations
for Cascadia subduction zone earthquakes. Earthquake
Spectra, 7, 201–236.
285
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-34.qxd 08/11/2003 20:40 PM Page 287
FLAC and Numerical Modeling in Geomechanics, Brummer et al. (eds)
© 2003 Swets & Zeitlinger, Lisse, ISBN 90 5809 581 9
The usability analyses of HDPE leachate collection pipes in
a solid waste landfill
F. Ma
Washington State Department of Ecology Solid Waste Program, Eastern Regional Office, Washington, USA
ABSTRACT: The objective of the FLAC modeling effort was to analyze the stress–strain behavior of High
Density Polyethylene (HDPE) leachate collection pipes proposed for an eastern Washington State solid waste
landfill. Case one of the FLAC modeling assessed whether a 102 mm (4) diameter Standard Dimension Ratio
(SDR) 9 perforated HDPE leachate collection pipe could withstand the load of up to 64 m (210) high column
of solid waste. Similarly case two of the FLAC modeling predicted how a 305 mm (12) diameter perforated
SDR 11 HDPE pipe would perform under a solid waste load of as much as about 26 m (85). The FLAC analyses allowed simulating the development of stresses and deformations in the HDPE leachate pipes as the solid
waste column grows. The model predictions were compared with results from a methodology included in the
Guidelines for HDPE Pipes in Deep Fills (Petroff 1998) used by CH2MHILL (2002) in their design. Using the
industry standards of (1) ring compressive stress, (2) pipe deflection and (3) wall buckling, the FLAC results
were very similar to the values in the CH2MHILL (2002) study. The main conclusion of the FLAC modeling is
that the proposed HDPE leachate collection pipes will be adequate to withstand the loadings associated with the
proposed solid waste column heights.
overlies the bottom composite liner of the landfill
(CH2MHILL 2002).
1 INTRODUCTION
Finite difference analyses using the computer code
FLAC (Fast Lagrangian Analysis of Continua) were
conducted of a solid waste landfill expansion project
at the Graham Road Landfill, Spokane County,
Washington State. The analyses were performed to
confirm the adequacy of modeling done by the project engineer, CH2MHILL. Specifically, the analyses
focused on predicting the stress–strain responses of:
i. a 102 mm (4) diameter SDR 9 perforated HDPE
leachate collection pipe under solid waste load up
to 64 m (210), and
ii. a 305 mm (12) perforated SDR 11 HDPE pipe
under a solid waste load of about 26 m (85) when
the landfill is under final closure, respectively.
2 SITE CONDITIONS
The landfill accepts solid wastes from industries and
other sources, but it does not accept municipal solid
wastes. The leachate collection and recovery system
(LCRS) consists of a 0.3 m (12) thick granular
drainage layer with embedded, perforated HDPE pipes
to collect and remove leachate. This LCRS directly
3 MODEL CONFIGRATIONS
3.1
CH2MHILL (2002) evaluated the adequacy of the
102 mm (4) diameter SDR 9 LCRS header pipe and
305 mm (12) SDR 11 sump/pump access pipe by the
procedures included in “Guidelines for HDPE Pipes in
Deep Fills” (Petroff 1998). The methodology assesses
(1) ring compressive stress, (2) pipe deflection, and
(3) wall buckling. The evaluation confirmed that the
102 mm (4) SDR 9 and the 305 mm (12) SDR 11
were adequate for the anticipated 64 m and 26 m
(210 and 85) of overlying fill, respectively. It should
be noted that the analysis assumes the bedding encapsulating the pipe will be compacted to a minimum of
90 percent of the maximum density as determined by
ASTM Procedure D698. This compacted zone must
extend immediately above the pipe and for 5 feet on
either side of the pipe. The specifications prepared by
CH2MHILL (2002) accordingly required the compaction of the drain rock around the pipe to the above
cited minimums.
287
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
Consultant analyses
09069-34.qxd 08/11/2003 20:40 PM Page 288
3.2
This study’s current modeling
The empirical equations provided in the Guidelines
for HDPE Pipes in Deep Fills (Petroff 1998) predict
the maximum ring compressive stress and the maximum pipe deflection. The FLAC modeling described
herein went on to predict the distribution of the axial
stress, shear stress and bending momentum in the
pipes as well as the stress–strain or deformation relationship under plane strain conditions.
The following simplifications or assumptions were
made in the FLAC modeling.
i. The HDPE pipe is modeled with isotropic-elastic
beam segments; its material properties per unit
length are area A t, moment of inertia I t3/12,
elastic modulus under plane strain e ey /
(1 2), where t is the pipe wall thickness, ey is
the Young’s modulus and the Poisson ratio. The
material properties of the 102 mm (4) SDR 9 and
305 mm (12) SDR 11 pipes are listed in Table 1.
The effect of perforations in the HDPE pipes was
modeled by reducing the wall thickness by one
twelfth as typical perforations account for that
much of the pipe mass.
ii. The gravel drainage layer is simulated as a perfect
plastic Mohr-Coulomb material. The material
properties include bulk modulus K, shear modulus Gs, friction angle and density. The average values of density and friction angle of gravel are
2.16 g/cm3 (135 lb/ft3) and 40 degree, respectively. As adapted and extended from McGrath
(1994) by Petroff (1998), the typical design values
of one-dimensional constrained modulus Ms of soil
increase linearly with the increase of the soil overburden pressure. This linear relationship (Petroff
1998) was used in the FLAC modeling and
was related to bulk modulus K and shear modulus
Gs by (K Ms (1 )/(3 (1 )) and
Gs Ms(1 2)/ (2(1 ), respectively. The
elastic modulus Es is related to the constrained
modulus Ms of the soil by Es Ms(1 )
(1 2)/(1 )). The material properties of the
gravel layer are listed in Table 2.
iii. The waste behavior is simulated by the elastoplastic Modified Cam-Clay model in FLAC. The
behavior of the HDPE pipes is the focus of the
modeling effort here. The stress-strain response of
the waste was of little interest. Thus, the waste
properties approximated with values typical of
soft clay at a density of 1441 kg/m3 (90 lb/ft3) were
used as the input parameters of the wastes. The
model parameters are elastic shear modulus
G 5.12 104 kPa (7430.6 psi), maximum
elastic bulk modulus Kmax 1.53 105 kPa
(22222.2 psi), density a variable with depth
(Kavazanjian et al. 1995), slope of elastic swelling
liner 0.03, slope of normal consolidation line
0.13, frictional constant M 1.418, preconsolidation pressure pc 71.8 kPa (10.4 psi), reference pressure p1 71.8 kPa (10.4 psi), and
specific volume at reference pressure on normal
consolidation lien 1.75.
Table 1. Material properties of HDPE pipes.
Setting
d
kg/m3
t
mm
A
mm2
I
mm4
e
kPa
4 SDR 9*
12 SDR 11*
955.2
955.2
12.7
29.4
322.6
746.8
4.34E 3
5.38E 4
2.14E 5
2.14E 5
* Note: the values are obtained or deduced and deducted from Driscoppipe data sheets
and are values per 25.4 mm (1 inch) of the pipes.
Table 2. Material properties of gravel layer.*
Overburden
kPa (psi)
Ms
kPa (psi)
K
kPa (psi)
Gs
kPa (Psi)
68.9 (10)
137.9 (20)
275.8 (40)
413.7 (60)
551.6 (80)
689.5 (100)
10,342.1 (1500)
11,721.1 (1700)
14,479.0 (2100)
17,236.9 (2500)
19,994.8 (2900)
22,063.2 (3200)
6405.2 (929)
7253.3 (1052)
8963.2 (1300)
10,673.1 (1548)
12,376.1 (1795)
13,658.5 (1981)
2957.9 (429)
3350.9 (486)
4136.9 (600)
4922.9 (714)
5715.8 (829)
6301.8 (914)
*Note: the values are obtained or deduced and deducted from Petroff (1998) with
Poisson ratio 0.3.
288
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-34.qxd 08/11/2003 20:40 PM Page 289
iv. The HDPE pipe is connected to the surrounding
gravel layer using the FLAC interface. The interface allows the relative slip between the HDPE
pipe and the gravel. The interface input parameters per unit length are normal stiffness
kn 411.6 N/mm (2341 lb/in), shear stiffness
ks 107.8 N/mm (619 lb/in), and friction angle
30°. Due to limited data availability on the
interface properties, more studies will be done in
some future researches.
of the pipe response. When executing the models, the
waste was added layer by layer to simulate a landfill
operation. As the waste pile grew, increasing the vertical overburden pressure, the modulus of the gravel layer
increased accordingly (Petroff 1998). Since the relatively small sizes of the HDPE pipes, no further refinements of the mesh around the pipe openings were done.
The details of the model grids for the two scenarios
are shown in Figures 1 & 2. The horizontal dimension
of the grid was chosen such that a further increase in
width had no material impact on the modeling results
4.1
4 MODELING RESULTS
305 mm (12 ) SDR 11 HDPE LCRS header
pipe under solid waste load up to 26 m (85 )
The axial compression, shear and moment distribution for the 305 mm (12) SDR 11 HDPE LCRS
sump/pump pipe under solid waste of 26 m (85) are
shown in Figure 3. Since the results for pipes with or
without perforations are very similar, only the latter
are shown here. Numerical values of the data shown
graphically in Figure 3 are presented in Table 3.
Figure 1. Cross section of the 305 mm (12) SDR 11
HDPE pipe in the landfill leachate collection layer under the
26 m (85) of solid wastes.
Figure 2. Cross section of the 102 mm (4) SDR 9 HDPE
pipe in the landfill leachate collection layer under the 64 m
(210) of solid wastes.
Figure 3. Predicted distributions of axial compression,
shear and moment of the 305 mm (12) SDR 11 HDPE pipe
without perforation under a simulated solid waste loading of
26 m (85).
289
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-34.qxd 08/11/2003 20:40 PM Page 290
Table 3. Numerical results corresponding to Figure 3.
Elem
ID*
Nod1*
Nod2*
24
23
22
21
20
19
18
17
16
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
24
23
22
21
20
19
18
17
16
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
25
24
23
22
21
20
19
18
17
16
15
14
13
12
11
10
9
8
7
6
5
4
3
2
F-Shear
N
F-axial
N
27.6
22.2
15.6
39.5
39.5
48.1
74.0
78.0
64.1
86.7
47.4
10.3
8.8
8.1
7.45
73.0
49.9
93.8
75.3
69.2
84.1
38.6
35.6
35.7
841.8
855.5
892.8
949.6
989.8
1068.2
1166.2
1254.4
1332.8
1411.2
1479.8
1489.6
1499.4
1506.3
1460.2
1381.8
1303.4
1244.6
1136.8
1048.6
989.8
912.4
860.4
837.9
Mom-1
N-m
4.60
4.15
3.82
2.98
2.16
1.15
0.39
2.03
3.36
5.17
6.16
5.95
6.13
5.96
4.44
3.20
2.17
0.21
1.36
2.81
4.57
5.37
6.13
6.87
Mom-2
N-m
5.18
4.61
4.15
3.82
2.98
2.16
1.15
0.39
2.03
3.36
5.17
6.16
5.95
6.16
5.96
4.44
3.20
2.17
0.21
1.36
2.81
4.57
5.37
6.13
*Note: Elem ID 1 corresponds to the pipe segment at pipe crown with nods 1 and 2. Elem ID
24 to the pipe segment at pipe invert. F-shear and F-axial are the shear and axial forces of the
each pipe segment, respectively. Mom-1 and Mom-2 are the moments of both ends of each
pipe segment.
Figure 3a shows that the maximum hoop compressive force occurs near the pipe springline and is
approximately 50% larger than that at the pipe crown
and invert. The maximum shear force occurs at
approximately 45 degrees below the pipe crown as in
Figure 3b. Figure 3c shows that the moment near the
pipe crown and springline are approximately 25%
larger than that at pipe invert.
4.2
102 mm (4 ) SDR 9 HDPE LCRS header pipe
under solid waste load up to 64 m (210 )
The axial compression, shear and moment distributions
for the 102 mm (4) SDR 9 HDPE LCRS header pipe
predicted for 64 m (210) of solid waste are shown in
Figure 4. As in the earlier case, the results for pipes with
or without perforations are very similar. Thus, only the
latter are shown here. The numerical results underlying
the graphical data in Figure 4 are cited in Table 4.
Similar trends are evident in the loadings predicted
in Figure 4 to those predicted for the 12 SDR 11 pipe
case. However, the differences between the values of
hoop compression and moments at the pipe crown,
springline and invert are much smaller, see Table 4
and Figures 4a&c. As in the case of the 305 mm (12)
SDR 11 pipe, the maximum shear force is predicted
to occur at approximately 45 degrees below the pipe
crown, see Figure 4b.
4.3
4.4
Comparing FLAC predictions to those of
traditional empirical formulas (Petroff 1998)
According to general thin beam theory, the normal
stress in the pipe wall is the combination of normal
stresses from the hoop force and the bending
moments. It is expressed as follows:
290
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
Pipe crown deflections
The predicted crown deflection of a buried pipe is one
of the key parameters in assessing the structural adequacy of a pipe in traditional pipe analyses. The predicted displacement histories of the pipe crown and
invert are shown in Figures 5 & 6.
(1)
09069-34.qxd 08/11/2003 20:40 PM Page 291
Table 4. Numerical results corresponding to Figure 4.
Elem
ID*
Nod1*
F-Shear
Nod2* N
F-axial
N
12
11
10
9
8
7
6
5
4
3
2
1
12
11
10
9
8
7
6
5
4
3
2
1
13
12
11
10
9
8
7
6
5
4
3
2
661.5
698.7
751.7
792.8
852.6
941.8
933.0
895.7
861.4
789.9
708.5
672.3
33.0
65.9
80.7
54.1
70.2
58.2
40.1
38.5
95.1
100.4
70.7
46.1
Mom-1
N-m
2.07
1.11
0.07
0.87
1.89
2.74
2.16
1.59
0.20
1.26
2.30
2.97
Mom-2
N-m
2.56
2.07
1.11
0.07
0.87
1.89
2.74
2.16
1.59
0.20
1.26
2.30
*Note: Elem ID 1 corresponds to the pipe segment at pipe crown
with nods 1 and 2. F-shear and F-axial are the shear and axial forces
of the each pipe segment, respectively. Mom-1 and Mom-2 are the
moments of both ends of each pipe segment.
Figure 4. Predicted distributions of axial compression,
shear and moment per 25.4 mm (1) of the 102 mm (4) SDR
9 HDPE pipe without perforation under solid waste loading
of 64 m (210).
where Normal stress, kPa (psi); N compressive hoop force, N (lb); A cross-sectional area of
pipe wall, m2 (in2); M bending moment, N-m (lbin); I inertia of wall cross-section, m4 (in4); and
t pipe wall thickness, m (in).
For a pipe under plane strain conditions, only a unit
length of pipe need to be considered in Equation 1.
Using the modeling results of Tables 3 & 4 and the
material properties and geometries of the pipes (Table
1), the normal stress distributions from inner to outer
fibers in the pipe wall are shown in Figures 7 & 8
using Equation 1. Figures 7 & 8 clearly showed that
there are only four locations where the pipe wall is
under uniform compression. For the rest of the pipe
section, larger compressive stresses exist either in the
Figure 5. Displacement and crown deflection of the buried
HDPE 305 mm (12) SDR 11 Pipe.
outer or inner fibers of the pipe wall. The higher compressive stresses from both the hoop and bending
effects are predicted to occur at the crown, invert or
springline of the pipe. Furthermore, the maximum
hoop and total compressive stresses occur at or near
the springline of the pipe.
The predicted maximum hoop and compressive
stresses and the crown deflection of the pipe from the
modeling results are summarized in Table 5 along with
the results of CH2MHILL (2002). A comparison of
data shows the CH2MHILL results based on Petroff
(1998) are in relatively good agreement with the
FLAC results. Note that the predicted displacements
291
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-34.qxd 08/11/2003 20:40 PM Page 292
Inner fiber
Outer fiber
48
47
4.00E+03
3.00E+03
1
2
46
45
44
Hoop comp.
3
4
5
6
43
7
42
8
2.00E+03
9
41
40
1.00E+03
10
11
39
0.00E+00
38
12
37
13
-1.00E+03
36
14
35
15
34
16
33
17
18
32
19
31
30
29
Figure 6. Displacement and crown deflection of the buried
HDPE 102 mm (4) SDR 9 Pipe.
Inner fiber
Outer fiber
24
8.00E+03
23
Hoop Comp.
28
27 26
25 24
23
22
Figure 8. Hoop compressive stress and normal stresses
along the inner and outer fibers per 25.4 mm (1) of the
305 mm (12) SDR 11 HDPE pipe without perforation
included (unit in kPa).
1
2
3
6.00E+03
Table 5. Maximum stresses from FLAC and empirical
formulas.
4
22
20
21
4.00E+03
21
0.00E+00
20
Pipes Model
SDR/D type
6
-2 .00E+03
19
-4 .0 0E+03
7
11/12
8
18
9/4
9
17
10
16
Pipe
Max-comp crown
stress
deflection
kPa
%
2.01 103
2.16 103
1.73 103
2.94 103
3.10 103
3.78 103
3.68 103 3.6
3.72 103 4.0
3.5
6.93 103 6.7
6.99 103 7.7
6.8
Note: Modeling results ignoring pipe perforations;
Note: Modeling results considering pipe perforations; and
Note: See CH2MHILL (2002) study for details.
2
12
13
3
Figure 7. Hoop compressive stress and normal stresses
along the inner, outer fibers per 25.4 mm (1) of the 102 mm
(4) SDR 9 HDPE pipe without perforation (unit in kPa).
of CH2MHILL’s (2002) modeling are similar to those
of the solid pipe in the FLAC analyses. However,
CH2MHILL’s prediction of crown deflections are
lower than those of FLAC when modeling a perforated
pipe. Overall the results of both methods are within or
are very close to the allowable ranges of industry standards of 6.89 103 kPa ( 1000 psi) hoop compressive
stress and 7.5% crown deflection (Wilson-Fahmy and
Koerner 1994).
4.5
Buckling
Ideally, a more sophisticated pipe model would be
employed to account for the visco-plastic behavior of
HDPE pipes. This would allow incorporating creep
and pipe buckling effects into the FLAC modeling
results. This was not done. Instead, the factor of safety
against buckling was assessed by simply computing
the ratio of computed stresses to the critical buckling
stresses as per Wilson-Fahmy and Koerner (1994).
According to their study, the critical buckling stresses
for pipes of SDR 11 and 9 are 1.03 104 and
1.17 104 kPa (1500 and 1700 psi), respectively.
292
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
FLAC1
FLAC2
CH2MHILL3
FLAC1
FLAC2
CH2MHILL3
1
11
15
14
Max-hoop
stress
kPa
5
2.00E+03
09069-34.qxd 08/11/2003 20:40 PM Page 293
Dividing the critical buckling stresses by the pipe wall
hoop stresses in Table 5, yields factors of safety of
4.79 and 3.79, respectively, for 12 SDR 11 and 4 SDR
9 pipes with perforation. These values exceed industry
practice of a minimum factor of safety of 2.
5 CONCLUSIONS
First, the results presented in Figures 7 & 8 demonstrate graphically the predicted stress distribution
along the pipe wall. Based on these results, a stress
induced failure of the pipe would be judged acceptably remote. If one where dealing with appreciably
greater waste depths one would expect pipe overstressing to initiate near the springline of the pipe.
Second, the results based on the “Guidelines for
HDPE Pipes in Deep Fills” (Petroff 1998) are relatively close to the FLAC modeling results. Therefore,
the more sophisticated FLAC modeling is likely unnecessary. It would seem warranted only when conventional empirical methods indicate the pipe stresses and
crown displacements approach the minimum accepted
factor of safety on a critical project.
ACKNOWLEDGMENTS
The author wishes to thank Waste Management (WM)
Northwest for its permission to publish the paper. Special thanks to the review and comment of Mr. Rodger
North of WM.
Special thanks also to Mr. Jerald LaVassor of
Washington State Department of Ecology Water
Resources Program Dam Safety Section for his invaluable technical and editorial revisions of the paper.
REFERENCES
CH2MHILL. 2002. Cells 4 and 5 Design Report, Graham
Road Recycling and Disposal Facility. Spokane,
Washington: Waste Management, Inc.
McGrath, T. 1994. Analysis of Burns & Richard Solution for
Thrust in Buried Pipe. Simpson Gumpertz & Heger, Inc,
Cambridge, Massachusetts.
Petroff, L. 1998. Guidelines for HDPE Pipes in Deep Fills,
(written under the employment of PLEXCO).
Wilson-Fahmy, R.F. & Koerner, R.M. 1994. Finite Element
Analysis of Plastic Pipe Behavior in Leachate Collection
and Removal Systems. Geosynthetic Research Institute,
Drexel University.
293
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-35.qxd 08/11/2003 20:40 PM Page 295
FLAC and Numerical Modeling in Geomechanics, Brummer et al. (eds)
© 2003 Swets & Zeitlinger, Lisse, ISBN 90 5809 581 9
FLAC numerical simulations of the behavior of a spray-on liner for
rock support
C.P. O’Connor & R.K. Brummer
Itasca Consulting Canada Inc, Sudbury, Ontario, Canada
G. Swan
Falconbridge Ltd, Sudbury Operations, Sudbury, Ontario, Canada
G. Doyle
3M Canada Co., Mining Division, London, Ontario, Canada
ABSTRACT: The current practice of bolting and screening of underground excavations is time consuming and
labor intensive and requires extensive materials handling. In pursuit of alternative rock support systems,
Falconbridge Ltd. has experimented with several different spray-on liners. In co-operation with 3M Canada, a thin
spray-on liner was developed with the intention of replacing screen and reducing the cycle time in rapid development mining. FLAC was used on this project to provide an efficient method of investigating alternative material
properties without the expense that is typically incurred in full scale testing.
1 INTRODUCTION
2 LINER SUPPORT SYSTEM
The implementation of high speed development techniques necessitates the use of rapidly installed support
in order to meet the desired cycle time. Current practices of bolting and screening are labor intensive and
add significant time to the development cycle. The use
of spray-on-liners to act as membrane support in place
of screen is seen as the next step in the evolution of
rapid development.
The physical characteristics of membrane support
need to be extensively tested. Full scale physical testing
is expensive and time consuming and the number of
such tests needs to be limited. In order to fill the gap
between laboratory measurements of liner properties
and full scale trials of the material, a numerical model
of the testing apparatus was constructed. This provides
a method by which a large number of potential liner
formulations can be investigated without the expense of
full scale testing.
Using the cable element capability of FLAC, a model
of the “baggage loading” testing apparatus was generated to allow for a large number of simulations to be
carried out to cover the wide range of properties
observed in the liner material.
The spray on liner support system developed by 3M
Canada is a polymeric compound that contains approximately 40% water when initially applied. As the liner
dries out (the rate is dependant on the ambient temperature, humidity, and air flow) the strength builds until
after 24 to 72 hours it approaches its ultimate tensile
and adhesive strength. The time dependence of the
strength of the liner is a critical aspect and one that is
very difficult to define in full scale testing apparatus
since there are so many variables involved.
Shotcrete is often sprayed in excess of 4, this liner
system only requires 2 to 3 mm final dried thickness to
perform. When dealing with such a thin application,
minor thickness variations become important.
Another important characteristic of this liner compound is the elongation potential. Depending on the
formulation in use, strains ranging from 100 to 600%
are possible. Having such a large capacity to deform
should help prevent violent failures due to stress
build up. A stress–strain curve for some early liner formulations is shown in Figure 1.
One final challenge in understanding this material is
that it does not yield in a linear fashion. Instead, there
295
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-35.qxd 08/11/2003 20:40 PM Page 296
Stress–strain curve of System I and II
Stress (MPa)
System II with strong adhesion
System I
0
100
200
300
400
500
Percent strain
600
700
800
Figure 1. Stress–strain curve for early revisions of the 3M
spray on liner product.
Figure 4. Grid used in the spray on liner modeling.
modeled. There are currently two tests in use for the
liner material. The first is the “dog bone” test, performed on small samples of material and used to generate the stress–stain curves. The second is the
“baggage load” test in which a 1 m2 metal frame is
filled with rock and sprayed with a coating of liner
and tested to failure in a press (see Fig. 2).
3
Figure 2. Baggage load testing frame with a 2 to 3 mm
sprayed thickness of liner product.
Loading Platen
Coarse Gravel
Thin slabby granitic material
2 to 3 mm liner support
Steel Loading Frame
Figure 3. Geometry of the baggage loading test frame.
is a well-defined initial yield point located near a
strain of 30% after which the stiffness of the entire
system reduces until the ultimate tensile strength is
reached.
All of these different parameters (thickness, time
dependent strength, complex yield curve, and extensive deformations) must be accounted for and
A FLAC model was built to replicate the baggage load
testing apparatus. This involved a complex interaction
between several different types of materials and cable
elements. The actual grid used in the model is shown in
Figure 4. The liner is represented by a string of cable
elements across the bottom boundary of the slabby
granitic material.
A key challenge in the modeling was obtaining the
correct response of the liner as the stiffness changes in
response to plastic deformation. To do this, a FISH function was written in which the modulus of the material
was dynamically adjusted within specific strain intervals defined in a table. This allows for automatic adjustments of the material properties during cycling ensuring
an accurate response (see Fig. 5).
The stiffness of the material depends on the amount
of drying of the liner, and therefore the modulus of the
material changes over time (see Fig. 7). In order to properly assess the effect of drying time on the performance
of the liner, a sensitivity analysis was required in order
to determine how the liner responds under different
conditions of drying time and thickness.
There is only a limited database of full scale testing
on which to calibrate the model. Using this limited data
and the material properties that were expected to be produced by the test (i.e. 4 hour drying time, 2 mm thickness), the model was calibrated as best as possible to the
test results available (see Fig. 6).
296
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
FLAC MODEL
09069-35.qxd 08/11/2003 20:40 PM Page 297
FLAC Simulations of 3M Liner Systems in CANMET Test
vs. Averaged Response Curves From Tensile Strength Testing
(Liner Thickness = 2mm)
10
9
Tensile Stress (MPa)
8
7
6
3M System 1 - FLAC
3M System 2 - FLAC
5
3M System 1 Averaged
3M System 2 Averaged
4
3
2
1
0
0.00
0.10
0.20
0.30
0.40
0.50
0.60
0.70
Strain
Stress (MPa)
Figure 5. A stress–strain plot created with the FLAC FISH function compared to the actual strengths reported in material
tensile testing.
Strain (mm/mm)
Figure 6. Full scale baggage loading test stress–strain curve.
3M Mining Liner - 23˚C / 70% RH
For <50fpm and 300fpm Air Flow
DRYING TIME, hours
1000
Tensile Yield, <50fpm
Tensile Ultimate, 300fpm
Secant Modulus Yield, <50fpm
100
Tensile Yield, 300fpm
Elongation Yield, <50fpm
Adhesion, <50fpm
10
1
0.01
Tensile Ultimate, <50fpm
Elongation Ultimate, <50fpm
Adhesion, 300fpm
0.1
100
1
10
STRENGTH/STIFFNESS, MPa; ELONGATION,%
Figure 7. Plot of adhesive and yield strength over time.
297
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
1000
09069-35.qxd 08/11/2003 20:40 PM Page 298
4 RESULTS
Several model simulations were performed in order to
calibrate the model against the observed and measured
response of the liner.
One of the first full scale tests carried out was an
application of the liner after 4 hours with no adhesion to
the rock (a silicone material prevented liner adhesion).
Immediately it became apparent that the adhesion of
the material was playing a much bigger role in the stability of the baggage loading test than would be anticipated. Figures 8 & 9 show the actual results and the
FLAC modeling results respectively for a liner that has
no adhesion to the rock. In both cases the liner quickly
deforms due to the low strength observed at this early
time after spraying.
The second test in the series involved the baggage
loading test with the material left to dry over a 24 hour
period. In this case, adhesion was allowed to take
place by lightly wetting the surface of the rock prior
to application.
With this second test, the liner was stable under
gravity loading from the dead weight of the rock in the
testing frame. The total displacement under this static
loading was 24 mm. This test was also the source of the
stress–strain data generated in Figure 6. This test provided valuable data for the calibration but also demonstrated that there was another effect at work that was not
being accounted for in the modeling. The model predicted a total displacement for this particular test at
90 mm rather than the 24 mm observed in Figure 10.
In order to make up for the difference in displacements observed between the baggage loading tests and
the FLAC models, an investigation took place in which
the stiffness of the material was increased until matching results were observed.
Modifying the model properties resulted in a curious result. In order to match the performance of the
baggage loading test, the stiffness of the material had
to be increased to near 20 times its original value.
When these modified properties were used, the results
matched quite well with the observed testing (Fig. 12).
Figure 10. Baggage load test with adhesion – total static
displacement of 24 mm.
Figure 8. Baggage loading test with no adhesion.
JOB TITLE: Falconbridge-3M beggage Load Testing Model: 3M System 2
JOB TITLE: Falconbridge-3M Baggage Load Testing Model: 3M System 2
FLAC (Version 4.00)
FLAC (Version 4.00)
0.900
27-Mar-02 14:56
step 19190
-3 860E-01 <x< 1.786E+00
-1.300E+00 <y< 8.715E-01
Grid plot
0
LEGEND
0.500
LEGEND
21-Mar-02 12:08
step 21000
-2.222E-02 <x< 1.422E+00
-4.222E-01 <y< 1.022E+00
0.200
5E-1
-0.200
Axial Force on
Structure
Max. value
# 1 (Cable)
-1.100E+02
0.700
Grid plot
0.500
2E-1
0
Axial Force on
Structure Max. Value
# 1 (Cable) -4.934E+03
0.300
0.100
-0.500
-0.300
-1.000
-0.100
Itasca consulting Group, Inc.
Minneapolis, Minnesota USA
Itasca Consulting Group, Inc.
Minneapolis, Minnesota USA
0.000
0.400
0.800
1.200
1.500
Figure 9. FLAC modeling results for the baggage loading
tests with no adhesion.
0.300
0.500
0.700
0.900
1.100
1.300
Figure 11. FLAC results for the modeling of the baggage
loading test with adhesion and modified material properties.
298
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
0.100
09069-35.qxd 08/11/2003 20:40 PM Page 299
Figure 12. Calibration used on the FLAC model to match
the observed baggage loading test results.
JOB TITLE: Falconbridge-3M Baggage Load Testing Model: 3M System 2
FLAC (Version 4.00)
0.900
LEGEND
19-Mar-02 14:04
step 21000
-2.222E-02 <x< 1.422E+00
-4.222E-01 <y< 1.022E+00
0.700
0.500
Grid plot
0
2E-1
Axial Force on
Structure Max. Value
# 1 (Cable) -1.824E+03
0.300
0.100
-0.100
-0.300
Itasca Consulting Group, Inc.
Minneapolis, Minnesota USA
The adhesion certainly plays an important role in
the strength of the material and the model is unable to
fully account for the impact of adhesion because of the
method by which the cable elements are used. Because
the liner adheres to the slabs over most of its area, and
only deforms over a relatively small “gauge length”,
this would appear to be the largest difference between
the actual liner and the model. This difference would
have the effect of making the liner much stiffer than it
appears in a “dog bone” test.
The interlocking of the slabby blocks of material is
even harder to quantify. Each frame of material is
loaded by hand and as a result there is a complex
interaction between the blocks supporting each other
and being supported by the frame rails. It is difficult to
try and quantify this behavior without additional testing
being done to determine the sensitivity of the system to
the loading of the frame.
Despite the relatively small dataset used in the calibration, the model itself has proven quite useful for
modeling the baggage loading tests. The next step in the
evolution of this testing will be to use this information
to develop a drift modeler that incorporates the information gathered from these trails.
0.100
0.300
0.500
0.700
0.900
1.100
1.300
Figure 13. FLAC output for baggage load testing with
adhesion. Anticipated displacement was 90 mm instead of
the actual 24 mm measured.
Based upon the results observed in the full scale
testing, it was obvious that some mechanism must be
at work in order to account for the discrepancy in the
modeling. There are three possible sources of uncertainty that would tend to artificially increase the stiffness of the material, the adhesion, and the impact of
blocks interlocking with each other and the frame.
Firstly, the FLAC model is a 2D model, while the
actual baggage load test is three-dimensional.
However, the actual discrepancy would appear to be
too large to be accounted for simply by this difference.
5 CONCLUSIONS
The FLAC model has provided a valuable tool for
reducing the cost of full scale testing. With this model,
it is possible to anticipate the response of different
formulations of the liner at different thicknesses and
time frames. Given the high cost of full scale tests, it
can be used to narrow down the testing regime to the
most promising combinations of thickness, time, and
liner properties in order to maximize the data collected
during full scale tests. Further calibration against fullscale tests will help to reduce some of the uncertainty
involved with the model.
ACKNOWLEDGMENTS
The authors would like to thank all of those involved
in the preparation of the baggage load tests including
3M Canada, Falconbridge Ltd, and CANMET.
299
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-36.qxd 08/11/2003 20:41 PM Page 301
FLAC and Numerical Modeling in Geomechanics, Brummer et al. (eds)
© 2003 Swets & Zeitlinger, Lisse, ISBN 90 5809 581 9
A numerical study of the influence of piles in the passive zone of
embedded retaining walls
T.Y. Yap & C. Pound
Mott MacDonald Ltd, Croydon, Surrey, United Kingdom
ABSTRACT: Piles are often placed in the base of deep excavations to carry future structure loads or to reduce
base heave. Where these piles are located close to retaining walls, they can provide additional resistance to the
movement of the embedded length of the retaining wall. This paper discusses a series two-dimensional and threedimensional analyses carried out using the finite difference programs FLAC and FLAC3D to investigate the increase
in the passive resistance in front of the embedded retaining wall due to the presence of these piles. Two passive failure mechanisms were identified; the first involved squeezing of the ground upward between the wall and the piles
and the second involved squeezing of the ground between the piles. The influence of pile and wall roughness, pile
spacing and pile to wall separation was investigated in order to define which of the two passive failure mechanisms
would govern and under what circumstances. Based on the results of the two-dimensional analyses a methodology
was developed to determine the limiting passive resistance allowing for the presence of the piles. Three-dimensional
analyses were carried out which showed a close agreement with the results of the two-dimensional analyses.
1 INTRODUCTION
2 TWO-DIMENSIONAL ANALYSES
Excavations for building basements or transportation or
utility tunnels are often carried out within retained cuts.
Piles are often placed below the base of these excavations either to carry future structure loads or to reduce
short-term or long-term ground heave. Often to ease
pile construction or to reduce the overall construction
program, these piles are installed from the ground surface. If these piles are located close to the retaining
wall, they can reduce wall deflection over the embedded
length, which can be beneficial when considering the
effect of the construction works on adjacent structures.
Normally design of embedded retaining walls is
carried out using two-dimensional plane strain analyses. In such analyses piles would be represented as a
wall with smeared structural properties. In reality,
depending on the pile spacing, diameter and proximity of the wall, ground could be squeezed between the
piles and the conventional analyses could significantly overestimate the benefit of the piles. This
paper presents a two-dimensional numerical study
carried out using the finite difference program FLAC
to investigate the earth pressures developed between
rough, partially rough and smooth walls and piles
in close proximity. A three-dimensional analysis was
also used to investigate the validity of adopting a
smeared representation of the piles when the piles
are installed in soft clay.
2.1
Figure 1 illustrates the geometry of the problem where
a row of piles was located at a distance, d, from the
embedded portion of a retaining wall of embedded
length, H. The top of the model was taken to be the final
excavation level for the construction. The boundary
conditions were such that no displacement was allowed
on the base of the model and no horizontal or vertical displacement was allowed of the piles. In order to
H
Embedded
retaining wall
Piles
1.5H
d
Figure 1. Passive earth pressure problem (d 20 m).
301
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
Vertical section
09069-36.qxd 08/11/2003 20:41 PM Page 302
Table 1. Material properties.
6000
Drained
Unit weight (kN/m3)
Young’s modulus E (MPa)
Poisson’s ratio v
Cohesion c (kPa)
Friction angle (degree)
Dilation angle (degree)
15.5
6.0
0.49
20.0
0.0
0.0
18.0
25.0
0.25
0.0
30.0
0.0, 30.0
reduce boundary effects, the bottom of the soil mass
was located at a depth of 1.5 H. Beam elements were
used to model the embedded retaining wall and piles,
with interfaces connecting the beam elements to the
soil. The interface strength properties were varied to
represent different values of wall roughness.
A linear elastic perfectly plastic soil model was used
throughout these analyses, with the soil stresses limited
by the adoption of a Mohr-Coulomb failure criterion.
The soil properties adopted for both undrained and
drained materials are listed in Table 1. The undrained
material properties are typical of a soft clay, whereas the
drained properties are typical of a medium dense sand.
For both materials the initial horizontal stress was
generated using a coefficient of earth pressure at rest,
ko, of 1.0, although the results obtained are not believed
to be sensitive to the value of this parameter.
To determine the passive pressure, the wall was
forced towards the soil at a constant velocity and the
reaction of the soil on the wall measured. Analyses were
carried out for a range of values of d between 0.5 m and
20 m and for each analysis the limiting horizontal passive resistance was determined. The wall and pile friction was also varied between smooth and rough, with
equal values of friction being used on both the wall and
the piles in all cases. The limiting horizontal passive
resistance forces, Pph, were used to back-calculate the
mobilized passive earth pressure coefficients, for
undrained and drained soil materials, from the following equations:
(1)
(2)
where Kpc and Kp are the passive earth pressure coefficients associated with undrained and drained soil
materials respectively.
5000
Horizontal Force (kN)
Undrained
cw = 0
cw = c/3
cw = c/2
cw = 2c/3
cw = c
4000
3000
2000
1000
0.1
1
10
Distance between wall and piles (m)
100
Figure 2. Influence of the distance of the walls on the mobilized ultimate load (undrained material).
25
20
cw = 0
cw = c/3
cw = c/2
cw = 2c/3
cw = c
15
Kpc
Setting
10
5
0
0.1
1
10
Distance between wall and piles (m)
100
Figure 3. Influence of the distance of the walls on the mobilized ultimate passive earth pressure coefficient (undrained
material).
the undrained material. The limiting passive earth pressure coefficients are also given in Table 2. When the
wall and piles were placed 20 m apart, the computed
values of Kpc are very close to the theoretical values
given in CP2 and reproduced in Table 2. BS8002 suggests that the passive resistance in a cohesive soil can
be approximated by the following equation:
(3)
2.1.1 Undrained material
Figures 2 & 3 show the limiting horizontal passive
resistance and the limiting passive earth pressure coefficients respectively for a 10 m deep wall embedded in
The passive earth pressure coefficients predicted
by this equation are also given in Table 2. The passive
302
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-36.qxd 08/11/2003 20:41 PM Page 303
Table 2. Passive earth pressure coefficients for an
undrained material.
Horizontal Force (kN)
0
100
200
300
400
0
d(m)
0
c/3
c/2
2c/3
c
20
10
5
3
2
1
0.5
BS8002
CP2
2.04
2.03
2.03
2.03
2.03
2.01
2.01
2.00
2.0
2.31
2.34
2.67
3.11
3.66
5.33
8.68
2.31
–
2.42
2.47
2.96
3.62
4.45
6.95
12.0
2.45
2.4
2.50
2.58
3.23
4.10
5.21
8.54
15.2
2.58
–
2.61
2.74
3.68
4.99
6.64
11.7
21.6
2.83
2.6
Depth below top of wall (m).
Wall and pile friction, cw
-2
-4
0.5m
1m
2m
3m
5m
10m
20m
-6
-8
-10
Figure 5. Variation of earth pressure acting on a rough wall
for different wall to piles spacings.
Figure 4. Shear strain contours for a rough pile.
earth pressure coefficient predicted by this equation
are somewhat higher than the values predicted by
FLAC or quoted in CP2.
As the distance between the wall and the piles
decreases, Pph and Kpc computed for the rough and
partially rough walls increase. This is due to the frictional restraint developed on the piles. The higher the
wall cohesion, cw, the larger the vertical restraint
developed and hence the higher the values of Pph and
Kpc. Conversely, for smooth walls Php and Kpc remain
constant even though the distance between the walls
decreases to as little as 0.5 m.
Figure 4 shows a contour plot of shear strain increment for the analysis with a 20 m separation between
a rough wall and piles. The failure surface is clearly
shown comprising an arc adjacent to the wall and a
straight portion up to the ground surface. There is a fan
of intense shearing above the failure surface and adjacent to the wall, with the ground more distant from the
wall comprising a passive block with little or no internal
shearing.
Figure 5 shows the influence of the distance d on
the computed horizontal stress acting directly on the
perfectly rough wall. The apparent localized reduction
in the force at ground surface is due to the force acting
over one half of the area represented by the other
forces. When the piles are located 10 m or 20 m from
the wall the horizontal force profiles are nearly identical although there is a slight divergence below 8 m.
Inspection of Figure 4 shows that for the 20 m case
the failure surface reaches the ground surface approximately 14 m from the wall. For the 10 m case this
would not be possible and therefore the slightly higher
horizontal forces below 8 m are indicative of the interaction of the failure surface with the piles. As the distance d reduces there is a progressive increase in
horizontal force acting on the lower part of the wall
although the forces at the top of the wall down to a
depth of about 0.7 d remain unaffected by the presence
of the piles. Inspection of other analyses indicates that
the depth over which the forces on the wall remain
unaffected by the presence of the piles is dependent on
the wall roughness such that for a smooth wall and
piles this depth is approximately equal to d.
Further analyses were carried out and these analyses
showed that the limiting passive earth pressure coefficients given in Table 2 were correct for different wall
lengths provided the wall to pile separation, d, was normalized by wall embedment depth, H.
The significant increase in horizontal force acting
on the lower part of the embedded retaining wall is
matched by an increase in the force acting on the piles
at the same level. This suggests that the soil may be
squeezed between the piles rather than forced upwards.
On the other hand, the ground stresses over the top part
of the wall and piles are limited by conventional
passive failure.
303
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-36.qxd 08/11/2003 20:41 PM Page 304
Table 3. Limiting passive earth pressure coefficients for a
drained material with angle of friction of 30° and a dilation
angle of zero.
6
5
Wall and pile friction, w
0
/3
/2
2/3
20
10
5
3
2
1
0.5
CP2
2.94
2.95
2.98
3.00
3.01
3.02
3.01
3.0
3.96
4.50
6.99
13.3
34.3
731
–
4.0
4.44
5.53
11.2
35.5
141
–
–
–
4.57
6.45
17.6
95.5
639
–
–
4.9
4.70
7.09
36.2
354
–
–
–
5.8
Kp
4
d(m)
3
2
1
Associated
Non-associated
0
0
50
40
40
60
80
100
Wall friction (phi %)
phiw = 0
phiw = phi/3
phiw = phi/2
phiw = 2phi/3
phiw = phi
Figure 7. Comparison of passive earth pressure coefficient
for associated and non-associated materials.
analyses with a 20 m separation between the walls and
the piles were rerun assuming a dilation angle of 30°
for the material. Note that the general trend of Kp is
similar to that in Figure 5. The passive earth pressure
coefficient values for the material with the associated
flow rule are now equal to the values quoted in CP2.
Kp
30
20
10
0
0.1
20
1
10
Distance between wall and piles (m)
100
Figure 6. Variation of wall to piles spacing on the passive
earth pressure coefficient for drained material.
2.1.2 Drained material
Figure 6 shows equivalent results for a drained material, with dilation angle, , of 0°. When the embedded
retaining wall and the piles are placed far apart, Kp are
somewhat below the values given by CP2, except for
the smooth wall case. For a smooth wall and piles, the
values of Kp remains constant at the theoretical value
regardless of the distance d. However, for rough and
partially rough walls, the values of Kp increase rapidly
as d decreases. Note that in Figure 6 the lines are cut off
at a point where back-calculated values of Kp are larger
than 50. As for the results for an undrained material,
an increase in the wall friction w, leads to significant
increase in Kp. For high values of Kp it became increasingly difficult to obtain a reliable limit pressure since
the compressive stresses developed in front of the wall
became a significant proportion of the Young’s modulus.
The effect of assuming an associated rather than a nonassociated flow rule is shown in Figure 7. The drained
2.1.3 Friction on pile surface
The failure process describes above will lead to shearing along a vertical surface which passes around and
between the piles. Around the piles the friction mobilized on this surface will be given by the piles shaft
friction value whereas on the failure surface between
the piles, the strength mobilized is given by the soil
strength. The effective strength mobilized, c, on an
equivalent planar surface is given by the following
formula:
(4)
where D and S are the pile diameter and spacing
respectively. The parameter k can be approximated by
the following relationship:
(5)
For most normal situations, the value of c/c is close
to unity suggesting that the piled wall can normally be
considered as rough. Assuming that the embedded wall
is not rough, it is suggested, though not proven, that the
value of Kp can be obtained by averaging the Kp value
for the wall and that for the piles.
304
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-36.qxd 08/11/2003 20:41 PM Page 305
16
14
12
Ncp
10
8
6
D
4
smooth, 0 kPa
rough, 0 kPa
smooth, 200 kPa
rough, 200 kPa
2
S/2
0
1
2
3
4
5
6
7
8
9
10
S/D
Figure 9. Comparison of passive resistance coefficient
developed on smooth and rough piles for different pile diameter to pile spacing ratios.
Figure 8. Horizontal slice model.
2.2
Horizontal section
The analyses above show that the presence of a piled
wall in close proximity to the embedded length of
a retaining wall can have a significant effect on the
mobilized passive resistance. However, piles are rarely
installed as a continuous wall; more normally they are
installed at a spacing of between two and five times
their diameter. When the piles are not in contact it is
possible for the ground located in front of the wall to be
forced between the piles. This process cannot be modeled in a two-dimensional plane strain analysis of a
vertical section and could therefore limit the applicability of this type of analysis.
To investigate the probability of this form of behavior, a further set of two-dimensional analyses was
undertaken. The analyses considered a horizontal slice
through the piles. A diagram showing the configuration
of the model is shown in Figure 8. Symmetry through
the middle of the pile and the mid-point between the
piles was assumed. The pile was prevented from moving in all directions. The upper boundary of the model
had an applied pressure equal to the initial in situ
stress. The lower boundary of the model was displaced at a constant rate towards the pile. The pile was
connected to the ground through an interface which
allowed both shear displacement of the ground around
the pile and separation of the ground from the pile on
the “back” side of the pile. Only undrained analyses
were undertaken using the soil properties given in
Table 1. The resistance provided by the pile was monitored in two ways; firstly by determining the reactions on the grid points around the pile and secondly by
determining the reaction on the lower boundary. The
difference in these two reactions at the limiting state
after allowing for the magnitude of the in situ stress
was no more than 1% of the measured value.
Analyses were carried out for pile spacings ranging
between 1.3 D and 10 D where D is the pile diameter,
for different initial in situ stress conditions and with
either smooth or rough pile interface properties. The
force exerted on the pile, P, was converted to a bearing
capacity factor, Ncp value as follows:
(6)
Figure 9 shows the effect on Ncp of varying pile spacing for two different in situ stress states of 0 kPa and
200 kPa and for a rough or smooth pile interface. For
the 0 kPa analyses with a smooth pile interface the value
of Ncp reaches a minimum for a pile spacing of about
1.6 D with rapidly increasing values of Ncp for smaller
pile spacings and gradually increasing values for larger
pile spacings. The minimum value of Ncp is about 4.20.
The Ncp values are consistently higher for the rough pile
interface analyses with a minimum Ncp value of about
5.6 occurring at a pile spacing of about 2.5 D.
For the analyses with an in situ stress of 200 kPa the
Ncp values are higher than for the corresponding analysis with an in situ stress of 0 kPa. The analyses with a
smooth pile interface shows a minimum Ncp of 8.2 at a
pile spacing of 2.0 D whereas the analyses with a rough
interface show a minimum Ncp of 10.9 at a pile spacing
of 2.5 D. Both sets of analyses indicate that at higher
pile spacings the Ncp value becomes constant. For the
305
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-36.qxd 08/11/2003 20:41 PM Page 306
smooth and rough pile interface analyses the limiting
Ncp values are 9.3 and 12.0 respectively. These are comparable to the results given by Chen & Martin (2002).
Figure 10 shows the effect of varying the in situ
stress state for a constant pile spacing of 3.0 D. For the
smooth pile interface the Ncp value increases from
4.63 to 9.1 as the in situ stress is increased from 0 kPa
to 70 kPa and is then constant for higher in situ stress
states. For the rough pile interface the response is similar with the Ncp value increasing from 5.67 to 11.1 at
about 70 kPa with the value constant at higher in situ
stresses. The reason for the change from a gradually
increasing Ncp values at low stress to a constant value
at higher stresses can be resolved by inspection of the
deformation pattern around the piles. At stresses less
than 70 kPa the ground is not in contact with the back
of the pile whereas above this stress the ground is in
touch with the pile over the whole pile circumference.
As the stress is gradually increased from 0 kPa to
70 kPa the length over which the ground is not in contact with the pile gradually reduces.
These analyses would appear to suggest that the passive resistance provided by the pile would vary with
depth down the pile. Near the surface the restraint provided by the pile would be least and the ground movement would lead to a gap developing on the side of the
pile furthest from the wall.
2.3
Combined effect
The two dimensional horizontal section analyses have
shown that under high stress ground can be forced
between the piles. However, the ground forced between
12
10
Nc
8
the piles is resisted by a passive wedge behind the piles.
It is suggested that, except at very close pile spacings,
the wedge mobilized behind the piles is identical to that
which would have been mobilized if the piles had not
been present. The restraint provided by the piles is
therefore generally additive to the normal passive
wedge. The piles provide resistance only in that portion
of the passive wedge through which it passes. For a
smooth wall the failure surface underlying the passive
wedge rises at 45° from the toe of the wall. For a wall
with friction the failure surface rises at a shallower
angle (see Fig. 4). Conservatively it can be assumed
that the pile penetrates through the passive wedge to a
depth D–h. The total passive resistance, Ptotal, per meter
run provided by this failure mode can therefore be
expressed as follows:
(7)
To decide whether failure will occur by squeezing
of ground between the piles or by failure of ground in
front of the piles the mode with the lower failure load
must govern.
As an example the force required to develop the two
failure mechanisms has been calculated for the soil conditions described above with a 10 m deep wall with
1.5 m diameter piles at 4.5 m centers located 2 m in
front of the wall. The force for the combined failure
mode is 1825 kN/m whereas for the failure mode in
front of the piles, the force is 2103 kN/m. In this case
failure by squeezing of the ground between the piles is
more likely than failure by squeezing in front of the
piles. It is illustrative to note that passive failure would
have occurred at a force of 1297 kN/m if the piles had
not been present. This illustrates the significant increase
in the passive resistance caused by installing piles in
this location.
3 THREE-DIMENSIONAL ANALYSES
6
4
2
Smooth pile
Rough pile
0
0
50
100
150
In situ stress (kPa)
200
Figure 10. Comparison of passive resistance coefficient
developed on smooth and rough piles for different in situ
stress states.
The analyses discussed above provide a basic understanding of the mechanisms involved with piles in the
passive zone of embedded retaining walls, but the
actual behavior is almost certainly more complex than
the two dimensional analyses can show. It is conceivable that failure of a deeply embedded wall would occur
by a combination of both mechanisms. It is also difficult to judge the apparent horizontal stress acting in the
horizontal plane when assessing the resistance provided
by the piles.
To provide more guidance on the equivalence of discrete passive-zone piles compared to an equivalent
continuous wall a pair of three-dimensional analyses
have been carried out using FLAC3D. Both analyses
considered clay with the properties given in Table 1.
306
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-36.qxd 08/11/2003 20:41 PM Page 307
The clay layer was taken to be 30 m thick overlying a
hard stratum. To reduce the size of the model only that
part of the construction below final excavation level
was considered. The overall width of the model was
15 m which was deemed to be sufficiently wide to prevent interaction of the boundary with the wall or the
pile. As in the two-dimensional analysis of the horizontal slice, symmetry was adopted on vertical planes perpendicular to the wall through the center of the piles
and also through a point midway between the piles.
The wall was embedded 10 m into the clay and was
modeled using liner elements which comprise triangular plate elements connected to the ground through an
interface with normal and shear elastic and plastic
properties. Many propped embedded retaining walls
undergo maximum horizontal displacement at around
final excavation (formation) level and therefore the
wall was moved towards the soil by applying a horizontal force to the wall at formation level while also
preventing rotation about a horizontal axis at this
point. In one of the analyses, 1.5 m diameter piles
spaced at 4.5 m centers were modeled with the pile axes
located 2.75 m in front of the wall, resulting in 2.0 m
of soil between the wall and the nearest edge of the
piles. A close-up of this model is shown in Figure 11.
In the second analysis the pile was substituted by a
continuous wall with equivalent smeared properties to
that of the discrete piles. The centerline of the equivalent wall was also located 2.75 m from the embedded
wall. Both the discrete piles and the equivalent wall
were modeled using solid brick elements rather than
structural elements.
Both the discrete piles and the equivalent wall
extended the full depth of the model and both were
assumed to be rigidly fixed in a hard stratum at the
base of the model. Rough interface properties were
considered between the embedded wall, the pile, the
equivalent wall and the ground.
The wall and pile properties are given in Table 4.
The equivalent wall properties were derived using the
following formulae, which ensured that the equivalent wall had the same bending and axial stiffness as
the discrete piles.
(8)
Where Ep and Es are the Young’s moduli of the pile and
the equivalent wall respectively, and t is the equivalent
smeared pile wall thickness.
The model was initially brought to equilibrium under
the in situ stress conditions and by fixing the horizontal
movement of the embedded wall. The reactions developed on the embedded wall during this stage were then
applied as a series of nodal forces acting on the wall for
the remainder of the analysis. The analysis was continued by increasing the magnitude of the horizontal force
at the top of the wall in increments. After each increase
in the force the model was allowed to reach equilibrium.
Figure 12 shows the results of the two analyses. The
solid symbols show the displacement of the top of the
wall versus applied force for the two analyses. In both
cases the displacements are initially small as the force is
increased. Up to an applied force of 1500 kN/m the wall
movement is very similar in the two analyses. However
as the force is increased above 1500 kN/m, the wall
movement in the analysis with discrete piles increases
rapidly and appears to become unlimited at an applied
force of about 1850 kN/m. In the analysis with the piles
represented by an equivalent wall, the wall movement
does not increase as rapidly and only becomes unlimited as the applied force approaches 2000 kN/m. These
limiting values are very similar to the theoretical values
calculated in section 2.3 above.
Also shown in Figure 12 as open symbols is the pile
head or equivalent wall top movement versus applied
force. The pile movement is very similar to the
embedded wall movement up to an applied force of
1500 kN/m. In the analysis with discrete piles the pile
starts to move less than the wall as the applied force is
increased above 1500 kN/m. In the analysis with an
equivalent wall, the equivalent wall only starts to move
less than the embedded wall when the applied load
Table 4. Structural properties.
Figure 11. General view of the FLAC3D pile model.
Setting
Wall
Pile
Equivalent
wall
Thickness/diameter (m)
Young’s modulus E (GPa)
Poisson’s ratio v
1.0
28.0
0.2
1.5
28.0
0.2
1.35
8.46
0.2
307
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-36.qxd 08/11/2003 20:41 PM Page 308
0
1200
Depth below formation level (m).
Displacement (mm)
1000
Discrete Piles
Equivalent Wall
Discrete Piles
Equivalent Wall
Structural Elements
800
600
400
200
0
500
1000
1500
Applied Force (kN/m)
Relative displacement (mm)
350
300
Discrete Piles
Equivalent Wall
250
200
150
100
50
0
-50
500
1000
1500
Applied Load (kN/m)
2000
Figure 13. Relative wall and pile displacement in the threedimensional analyses.
exceeds 1850 kN/m. This effect is shown more clearly
in Figure 13 which plots the differential movement
between the top of the pile or equivalent wall and the
top of the embedded wall for the two analyses. Positive
relative movements indicate movement of the wall
towards the piles. The differential movement is small in
both analyses up to 1500 kN/m. In the analysis with discrete piles at higher applied forces the gap between the
wall and the piles begins to close rapidly as the ground
starts to squeeze between the piles.
In the analysis with the equivalent wall, at applied
forces greater than 1500 kN/m, the gap between the
-15
-20
-25
Embedded wall
Pile
Ground
0
200
400
600
Horizontal displacement (mm)
800
Figure 14. Wall, pile and ground displacement profiles for
an applied force of 1815 kN/m.
embedded wall and the equivalent wall increases up to
an applied force of about 1750 kN/m. This is believed
to be due to high ground stresses in front of the toe of
the embedded wall causing the equivalent wall to rotate
forward more rapidly at formation level. At even higher
applied forces the gap between the two walls reduces as
ground starts to be squeezed upwards between the two
walls. It is considered that the occurrence of significant
differential movement between the embedded wall and
the pile is indicative of the onset of passive failure of
the ground in front of the wall.
Figure 14 shows the horizontal displacement of the
embedded wall and the piles at an applied force of
1815 kN/m for the analysis with the discrete piles. The
horizontal wall displacement far exceeds the pile
movement suggesting that there is failure of the ground
past the pile. Also shown is the horizontal deflection of
the ground mid-way between the piles at the same
distance from the wall as the pile axis. The pattern of
ground displacement is complex with the section near
the ground surface moving significantly less than the
wall and only slightly more than the pile. This is
because a passive wedge develops near the ground surface which daylights in front of or between the piles.
Between 3 m and 10 m below ground level the ground
movement far exceeds the pile movement and is closer
to the movement of the embedded wall. This clearly
shows that the ground is being squeezed between the
piles. Because of the restricted gap between the piles
and the incompressible nature of the undrained material, under certain situations the ground displacement
between the piles could actually exceed the embedded
wall displacement.
In two-dimensional analyses piles or walls are often
represented using structural elements. These structural
308
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
-10
-30
-200
2000
Figure 12. Wall and pile displacements in the threedimensional analyses.
-5
09069-36.qxd 08/11/2003 20:41 PM Page 309
elements have no physical thickness in the model
although their axial and bending stiffness is modeled correctly by assigning appropriate values of area
and moment of inertia. The structural elements are
generally placed along the centerline of the piles or
wall that they are intended to represent. To investigate
the effect that modeling the piles as structural elements
has on the predicted passive resistance the threedimensional model was rerun with the piles represented by shell elements with properties identical to
those of the equivalent wall given in Table 4. The shell
elements were rigidly connected to the mesh and therefore represented a rough wall. To be comparable to the
other two analyses, the toe of the equivalent wall was
fixed against horizontal movements and was prevented
from rotating around a horizontal axis. Because
the structural elements have no physical thickness in
the model, 2.75 m of clay is now present between the
embedded wall and the equivalent wall.
The results of the analysis are shown in Figure 12 as
crosses. The greater thickness of soil between the
embedded wall and the equivalent wall gives a softer
wall displacement response compared to the analysis
with the equivalent wall modeled using solid elements.
The limiting passive pressure is also lower because of
the greater separation between the two walls. From
Table 2 it can be seen that increasing the wall separation from 2 m to 2.75 m for a 10 m deep wall has the
effect of reducing the passive earth pressure coefficient
from 6.4 to about 5.3. This results in a reduction in the
limiting passive resistance from 2100 kN/m to about
1835 kN/m which is very similar to the passive resistance predicted by this three-dimensional analysis.
4 DISCUSSION
There appears to be a good match between the passive
resistance obtained in the three-dimensional analysis
and the predicted passive resistance made from the
results of the two-dimensional analyses despite the obvious limitations of these analyses. A sensitivity study
carried out using the results of the two-dimensional
analyses for the undrained material shows that squeezing of the ground between the piles is more likely when:
1. The embedded retaining wall and piles are rough
rather than smooth.
2. The piles are spaced more widely.
3. The piles are nearer to the wall.
Using the two-dimensional analyses it is possible to
identify the critical pile spacing defining the change
in passive failure mechanism from squeezing of the
ground between the piles to squeezing upwards in front
of the piles. For a 10 m long embedded rough wall and
piles the critical pile spacing appears to vary from 2
pile diameters when the piles are located 2 m in front of
the wall to 4 diameters when the piles are located 5 m
in front of the wall.
5 CONCLUSIONS
The analyses have shown that piles installed in the
passive zone of embedded retaining walls can significantly increase the passive resistance mobilized in
front of the retaining walls. The passive resistance is
sensitive to the distance of the piles to the wall and
whether the piles and wall are rough or smooth. For
granular deposits the passive earth pressure coefficient increases dramatically as the spacing between
the walls and the piles reduces and it is suggested that
passive failure is unlikely to occur in this material
unless the piles are widely spaced or the wall has only
a shallow embedment.
Three-dimensional analyses showed a very similar
limiting passive resistance to a calculation based on
two-dimensional analyses. However, the deflections to
mobilize this passive resistance are large and may imply
unacceptable movement of the retaining structure. The
piles undergo significant lateral deflection, localized
bending and axial tension due to the movement of the
embedded wall and therefore it is important that these
piles are designed for these additional forces.
Where the passive failure mechanism does not comprise squeezing of the ground between the piles, twodimensional plane-strain analyses in which the piles are
represented by a wall with equivalent smeared properties will provide a safe estimate of the passive resistance. The analyses suggest that where piles are spaced
at 3 diameters or less in a cohesive deposit, squeezing of
the ground between the piles is unlikely to occur unless
the piles are located nearer to the wall than 30% of the
embedded length. Where the piles are represented by a
structural element, the additional soil present in the
model between the embedded wall and the structural
member will lead to a conservative estimate of the
passive resistance.
REFERENCES
BS8002: 1994. Code of Practice for Earth Retaining
Structures. British Standards Institution.
Chen C-Y & Martin, G.R. 2002. Soil-structure interaction
for landslide stabilizing piles. Computers and
Geotechnics 29: 363–386.
Civil Engineering Code of Practice No. 2 1951. Earth
Retaining Structures, Institution of Structural Engineers,
London.
309
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-37.qxd 08/11/2003 20:48 PM Page 311
Dynamic and thermal analysis
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-37.qxd 08/11/2003 20:48 PM Page 313
FLAC and Numerical Modeling in Geomechanics, Brummer et al. (eds)
© 2003 Swets & Zeitlinger, Lisse, ISBN 90 5809 581 9
A practice orientated modified linear elastic constitutive model for fire
loads and its application in tunnel construction
E. Abazović & A. Amon
Geoconsult ZT GmbH, Salzburg, Austria
ABSTRACT: A spate of fires in tunnels over the past decade, causing serious loss of life and significant
structural damage, has led to new safety concepts in tunnel construction. Nowadays these concepts are already
being considered during the design. In this context numerical methods represent a powerful tool for assessing
the structural forces in the lining and the change of material properties caused by thermal effects.
This article deals with the simulation of a fire within a tunnel by means of the program FLAC. The tunnel lining is modeled by four-node continuum elements for simulating non-linear and time dependent temperature
variation within the lining. The thermal effect is applied according to the fire load curve of the BEG-project,
a future major railway section between Italy and Austria passing the Alps, at the inside of the lining. The coefficient of thermal transmission between the thermal source and the lining is chosen such that the temperaturefield within the lining corresponds to experimental data. Non-linear material behavior due to thermal loading is
implemented by varying the coefficient of thermal expansion.
1 INTRODUCTION
Thermo mechanical processes are very complex and
they are characterized by non-linear material behavior
and transient heat transfer mechanisms. Mechanical
processes are depicted through induced stresses as a
result of mechanical loads. Alterations of the elastic
properties, spalling and material failure are caused by
fire loads.
In a case of tunnel fire the heat between the heat
source and the tunnel inner lining is transmitted by
radiation and convection. These exchange mechanisms
are dependent on various factors like brightness, air
flow velocity, temperature difference and material
conductivity. Convection is time dependent due to
transient conditions of the temperature gradient.
Heat interchange through radiation is characterized
by the difference of the fourth power of the temperature
quotient of the heat source and heat recipient. Heat
interchange through radiation is time dependent too.
The required calculation constants are difficult to
determine because of the above mentioned reasons,
and should therefore be determined by experiment. In
addition in absence of a material law describing the
complex thermo mechanical processes, numerical simulations are even more difficult. For this reason, this
article is intended to describe thermo mechanical
processes numerically through a modified linear elastic
material model by means of a user-defined function
(FISH-function).
2 ASSUMPTIONS
It can be assumed that the major principal stress within
a concrete tunnel lining tends to act in circumferential
direction and the minor principal stress (radial direction) can be neglected. In this case a uniaxial state of
stress within the tunnel lining prevails and the deviatoric stresses are negligibly small. The material behavior
is determined by only the spherical tensor. Since temperature loads are also only influenced by the spherical
tensor and the temperature load is linearly proportional to temperature increase it is possible to obtain a
stress change by variation of the thermal coefficient
of expansion.
The thermal load is applied in terms of a temperature
load at the inside of the tunnel lining. The applied
temperature is equivalent to the fire load curve of
the Brenner Eisenbahn Gesellschaft (BEG) project.
The temperature increases linearly within seven minutes from the initial temperature to the maximum
temperature of 1200°C which can be seen in Figure 1
(Gresslehner 2001).
313
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-37.qxd 08/11/2003 20:48 PM Page 314
s1
Temperature [°C]
Fire load curve BEG-1
s1
1200
sq = −3K . aq . ∆q = −3K . q
1000
sM = E . 1 = 3K . (1 − 2v) . 1
800
600
−
400
ϑ1
elϑ
ϑ2
+
ϑ
M
200
0
0
30
60
90
120
Time [minutes]
150
180
Temperature of concrete during BEG-1 fire
1200
1100
1000
180,ξ
900
360,ξ
800
540,ξ
700
1800,ξ
600
3600,ξ
500
5400,ξ
400
Figure 3. Material behavior.
parameters, until no further stresses can be taken, i.e.
material destruction. The presentation in form of a
usual stress–strain diagram is insufficient and inappropriate as the process is still controlled by temperature. To be able to define a material-law dependent on
temperature, the thermal process is depicted by analogy
to the stress–strain behavior (dashed axes).
Due to material warming, the elementary volume
expands linearly proportional to the temperature
increase (el) and the temperature expansion coefficient, whereby the material behavior is temperature
independent (Fig. 3, 0 1 70°C). Due to
restrained thermal expansion in the closed ring structure of a tunnel lining, the initial stress increase is calculated as:
Figure 1. Fire load curve.
Temperature of concrete [°C]
ϑ0
(1)
7200,ξ
300
10080,ξ
200
(2)
100
0
0
5 10 15 20 25 30 35 40 45 50 55 60
ξ
Depth of temperature penetration [cm]
Figure 2. Depth of temperature penetration.
The coefficient of heat transfer and the factor of
thermal conductivity are chosen until the temperature
gradients meet the experimental data, published by the
University of Innsbruck (Kusterle & Waubke 2001)
(Fig. 2).
where El
T elastic stress increase due to temperature
increase; K compression modulus; 0 coefficient of linear thermal expansion; temperature
increase.
Within a temperature range between 70 and 700°C
the elastic modulus decreases from 100% to 10% with
a sudden drop to 0% thereafter (material destruction,
spalling of concrete). The generated constraint and
temperature stresses which are caused by the loss of
the elastic modulus drop afterwards to zero.
3.2
Based on Hook’s law in the tensor form the following
shall apply:
3 NON-LINEAR THERMAL CONSTITUTIVE
MODEL
3.1
General
(3)
Due to mechanical loads the tunnel lining is under
compression (M, Fig. 3) and normal stress (M). This
state is the initial condition for the thermal calculations. In reality the normal stress will further increase
without change in strain under temperature load and
subsequently decrease due to the loss of the stiffness
314
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
Governing equations
(4)
(5)
09069-37.qxd 08/11/2003 20:48 PM Page 315
where
[Dij] deviatoric part of stress tensor;
[0ij] volumetric part of stress tensor;
[ij] total stress tensor;
[Dij] deviatoric part of strain tensor;
[0ij] volumetric part of strain tensor;
G, K shear and compression modulus, respectively
(Školska Knjiga 1996).
Based on the assumption that the deviatoric part of
the stress tensor is negligibly small in a closed tunnel
lining the total stress then equals the volumetric part
of the stresses:
(6)
(7)
Stress increase due to temperature increase has an
influence only on the volumetric part of the stress tensor. The volumetric strains are linearly proportional to
the temperature increase and the thermal expansion
coefficient:
(8)
where [ij ] thermal strain tensor; 0 coefficient
of linear thermal expansion; 1, 0 temperature at
time (1) and initial temperature; [ ij] Kronecker
-tensor, respectively.
If the volumetric displacements are restrained then
stresses will be induced into the elementary volume
as follows:
(9)
(10)
The stresses within the elementary volume can be
calculated as the sum of the stresses of the volumetric
tensor (Fig. 4) and the stress increase as a result of the
temperature load (Eq. 10).
Figure 4. Cross section with surface load.
where E t Young’s elastic modulus at time t for
temperature ; E0 Young’s elastic modulus at time
t 0; t actual temperature at time t; 2, 1 temperature at material failure and temperature at
beginning of material softening respectively.
The tensor form of Hook’s law written in incremental form for temperature loads gives:
(14)
The stress decrease observed in the temperature range
between 1 and 2 can not be achieved by a reduction
of the bulk modulus because a zero or negative increment characterized by a negative compression modulus is not possible. As the coefficient of temperature
expansion (0) is a linear part of the stress increment
it is possible to calculate a direct derivative of the
equivalent thermal expansion coefficient which gives
positive and negative increments. Analogous to Equation 13 we can write:
(15)
(11)
(12)
Within a temperature range between 1 70°C and
2 700°C the elastic modulus decreases approximately linearly from 100 to 10% so that the following
relation can be written:
(13)
Until a relaxation occurs at a temperature greater than
1 70°C the state of stress is determined by
mechanical and thermal stresses and therefore a negative equivalent coefficient of temperature expansion
has to be recalculated.
(16)
where the term [Rij] the volumetric deformation at
relaxation.
315
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-37.qxd 08/11/2003 20:48 PM Page 316
At a temperature 2 700°C the stress in the elementary volume has to be zero.
(17)
so that we can write:
(18)
(19)
(20)
where I 1 major principal stress at a temperature
1 70°C and 1 equivalent coefficient of thermal
expansion for temperature between 70°C and 700°C.
From Equation 20 we can easily obtain an equivalent coefficient of thermal expansion for the relaxation area:
(21)
Material
Friction
Angle
[Degree]
Young’s
Modulus E
[MPa]
Poisson’s
Ratio
[–]
Soil
Concrete
22.0
25.0
38.0
–
65.0
30,000
0.30
0.20
(21)
(22)
4 PRACTICAL APPLICATION OF A FIRE
LOAD WITHIN A TUNNEL
The investigated example is an NATM tunnel with an
overburden of 12 m and a uniform surface load of
100 kN/m2. All calculations are performed with FLAC
(Itasca 2000), a program for two-dimensional numerical calculations.
The discrete model consists of a matrix of 70 110
four node continuum elements for the soil (Fig. 5)
whereby the tunnel lining is also modeled by continuum elements to be able to implement a modified
Table 1. Constitutive constants.
Unit
Weight
[kN/m3]
If the temperature in the elementary volume is greater
than 700°C this effect is called as physical material
destruction and the elastic modulus decreases to zero.
As a zero value of the elastic constants within a numerical model is not possible a further correction of the
coefficient of expansion is necessary in order to achieve
a compensation of the increasing stresses, which would
be caused by static loads. The external load would cause
a negative extension (εM, Fig. 3) and therefore generate a compressive stress (M, Fig. 3) which should be
compensated by thermal expansion. The maximum
temperature in the element can theoretically reach the
value of the temperature source (3 1200°C, fire load
curve). Again, we can derive a temperature dependence of the coefficient of thermal expansion:
(*10^2)
JOB TITLE : G4126 BEG-Stans/Terfens, RQ 9a - km 53+500, Fire Load - 120 minutes
FLAC (Version 4.00)
0.300
LEGEND
0.100
19-May-03 8:03
step
45768
Thermal Time 7.2000E+03
-0.100
-3.000E+01 <x< 1.300E+02
-1.200E+02 <y< 4.000E+01
-0.300
Grid plot
0
2E 1
-0.500
-0.700
-0.900
-1.100
Geoconsult ZT GmbH
Salzburg - Austria
-0.200
0.000
0.200
Figure 5. Discretisized model.
316
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
0.400
0.600
(*10^2)
0.800
1.000
1.200
09069-37.qxd 08/11/2003 20:48 PM Page 317
linear-elastic material model. The lining and the adjacent soil are linked with so called “Interface” elements. For the tunnel lining a Young’s modulus of
E 30 GPa and a Poisson’s ratio of 0.2 has been
chosen. The soil is modeled according to an elastic–
plastic material model, the Mohr–Coulomb failure
criterion. To keep the calculation time within reasonable time limits only one half of the system is modeled, introducing symmetry boundary conditions.
The horizontal displacements at the symmetry axis
at the right boundary of the mesh are fixed as well as
the vertical displacements at the bottom boundary of
the model. At the surface a constant uniformly distributed load of 100 kN/m2 is applied. The initial stress
state is defined applying a lateral earth pressure coefficient of 40% of the vertical pressure. The implementation of the tunnel lining is performed without any
relaxation immediately after excavation.
After the static analysis, i.e. equilibrium within the
system prevails, a temperature load as a function of
time is applied at the inside of the tunnel lining (Fig. 6).
The coefficient of heat transfer 0 160 W/m2K and
the coefficient of thermal conductivity 1.6 W/mK
were varied such that the temperature gradient and
the velocity of thermal penetration corresponded to
experimental data. The values for the specific heat
CV 1000 Ws/kgK and the coefficient for thermal
expansion 0 1 105 1/K were chosen according
to the literature.
The calculation was performed as a coupled timedependent mechanical analysis where mechanical and
thermal time steps, which were calculated in real time,
changed cyclically.
5 VERIFICATION OF MATERIAL-MODEL
AND CALCULATION RESULTS
The verification of the temperature fields at different
time steps is done by comparison of the experimental
data with the temperature pattern within the tunnel
lining. As it can be seen in Figure 7 the numerical
results match well with the experimental values.
For verification of the material law a beam (1 m
wide, 45 cm high) was modeled by using a 1 cm by
1 cm zone size. A linear-elastic material model was
used with a Young’s modulus of 30 GPa and a Poisson’s
ratio of 0.25. Normal pressure of 3.0 MPa was applied
on the vertical boundaries and after static calculation
a thermal load according to the fire load curve (Fig. 1)
was applied on the bottom of the model. The “whilestepping” loop was used for calculating the equivalent
JOB TITLE : G4126 BEG-Stans/Terfens, RQ 9a - km 53+500, Fire Load - 120 minutes
FLAC (Version 4.00)
LEGEND
27-May-03 11:51
step 33549
Thermal Time 7.2000E+03
Table Plot
9 Minutes
+03
(10
)
1.000
0.800
30 Minutes
60 Minutes
90 Minutes
120 Minutes
0.600
0.400
0.200
5
10
15
20
25
30
JOB TITLE : G4126 BEG-Stans/Terfens, RQ 9a - km 53+500, Fire Load - 120 minutes
(*10^1)
0.900
LEGEND
19-May-03 8:03
45768
0.700
Thermal Time 7.2000E+03
-4.259E+00 <x< 1.019E+01
-4.270E+00 <y< 1.018E+01
0.500
Grid plot
0
2E 0
0.300
Applied Heat Sources
O Max Value = 1.302E+03
0.100
-0.100
-0.300
Geoconsult ZT GmbH
Salzburg - Austria
-0.300
-0.100
0.100
Figure 6. Detail of tunnel lining with applied temperature load.
317
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
40
-02
)
Figure 7. Depth of temperature penetration in FLAC.
FLAC (Version 4.00)
step
35
(10
GEOCONSULT ZT GmbH
Salzburg - Austria
0.300
0.500
(*10^1)
0.700
0.900
09069-37.qxd 08/11/2003 20:48 PM Page 318
JOB TITLE : G4126 BEG-Stans/Terfens, RQ 9a - km 53+500, Fire Load - 120 minutes
JOB TITLE : 90 minutes
FLAC (Version 4.00)
FLAC (Version 4.00)
LEGEND
2-Jul-03 15:38
step 10200
Thermal Time 5.2000E+03
HISTORY PLOT
Y-axis :
Rev_Prin. stress 1( 50, 2)
X-axis :
ztemp2
(FISH)
(10
LEGEND
+07
)
20-May-03 9:34
step 45768
Thermal Time 7.2000E+03
2.400
2.000
HISTORY PLOT
Y-axis :
m_his_239
(FISH)
X-axis :
Number of steps
1.600
1.200
0.800
-01
(10
)
2.000
1.500
1.000
0.500
0.000
-0.500
-1.000
-1.500
0.400
-2.000
0.000
39
1
2
3
4
5
6
7
8
+02
(10
40
41
42
43
44
45
(10
Geoconsult ZT GmbH
Salzburg - Austria
9
GEOCONSULT ZT GmbH
Salzburg - Austria
)
+03
)
Figure 11. Time progression of bending moment in roof.
Figure 8. Reverse principal stress vs. zone temperature.
JOB TITLE : G4126 BEG-Stans/Terfens, RQ 9a - km 53+500, Fire Load - 120 minutes
FLAC (Version 4.00)
JOB TITLE : G4126 BEG-Stans/Terfens, RQ 9a - km 53+500, Fire Load - 120 minutes
LEGEND
FLAC (Version 4.00)
+01
LEGEND
20-May-03 9:34
step 45768
Thermal Time 7.2000E+03
HISTORY PLOT
Y-axis :
Prin. stress 1( 130, 116)
X-axis :
ztemp6
(FISH)
(10
20-May-03 9:34
step 45768
Thermal Time 7.2000E+03
)
-2.000
-2.200
-2.400
-0.500
-2.600
HISTORY PLOT
-1.000
Y-axis :
n_his_130
-1.500
-2.800
(FISH)
X-axis :
Number of steps
-2.000
-3.000
-3.200
-3.400
-3.600
-2.500
-3.800
-3.000
39
10
20
30
40
50
60
70
Geoconsult ZT GmbH
Salzburg - Austria
+01
(10
40
41
42
43
44
45
Geoconsult ZT GmbH
Salzburg - Austria
(10
+03
)
)
Figure 12. Time progression of normal force in shoulder.
Figure 9. Major principal stress in dependence on temperature in element.
JOB TITLE : G4126 BEG-Stans/Terfens, RQ 9a - km 53+500, Fire Load - 120 minutes
FLAC (Version 4.00)
LEGEND
20-May-03 9:34
step 45768
Thermal Time 7.2000E+03
JOB TITLE : G4126 BEG-Stans/Terfens, RQ 9a - km 53+500, Fire Load - 12z0 minutes
FLAC (Version 4.00)
LEGEND
20-May-03 9:34
step 45768
Thermal Time 7.2000E+03
HISTORY PLOT
Y-axis :
n_his_239
(FISH)
X-axis :
Number of steps
)
-2.000
-2.500
HISTORY PLOT
Y-axis :
m_his_130
(FISH)
X-axis :
Number of steps
-1.600
-1.800
-01
(10
-1.400
-2.000
-2.200
-2.400
-2.600
-2.800
-3.000
-3.000
-3.500
-3.200
-4.000
39
Geoconsult ZT GmbH
-4.500
40
41
42
43
44
45
(10
+03
)
Salzburg - Austria
-5.000
39
Geoconsult ZT GmbH
Salzburg - Austria
40
41
42
43
44
45
+03
(10
Figure 13. Time progression of normal force in roof.
)
Figure 10. Time progression of bending moment in shoulder.
thermal coefficient of expansion during the thermal
analysis. Figure 8 shows the evolution of the reverse
major principal stress of a zone depending on the
temperature within the center of the zone. It is apparent
that at the beginning the principal stress increases to a
temperature of 70°C, and afterwards decreases linearly
to zero at the temperature of 700°C.
The same effect can be seen in Figure 9 where the
evolution of the major principal stress in one of the elements of the tunnel lining boundary, depend on the
temperature at the center of the element, is depicted.
The effects of stress changes for the internal forces
(axial force and bending moment) due to temperature
318
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-37.qxd 08/11/2003 20:48 PM Page 319
loading are presented for sections in the roof and shoulder area. Until application of a fire load a negative
moment predominates (tension soil-sided) whereas in
the roof a positive moment (tension cavity-sided)
predominates.
If the boundary elements do not reach the so-called
“Creep-Temperature” it is apparent that at the beginning the negative moment in the shoulder increases
significantly, but immediately afterwards the moment
decreases because of the loss of stress reception.
In the roof, constraint stresses develop from the
temperature. On account of this reason the tensile
stresses at the inside of the tunnel lining are reduced
or turn into compressive stresses. As a result of fire
loads the positive moment reduces as well until the
elements achieve the relaxation temperature. Afterwards
the moments change their direction in dependence on
the temperature in the next element rows.
The normal force in the lining is calculated over
the projection of the stresses normal to the cross-section
through integration over the thickness. From Figures 12
& 13, it is obvious that the normal force increases
suddenly and decreases after failure of the material
within a part of the lining elements. Afterwards the
normal force levels around the initial value and stays
more or less constant.
6 CONCLUSIONS
From the calculation results it is apparent that a
numerical simulation of thermo-mechanical processes
is possible. The quality of the results is dependent on
the quality of the implemented material-law and on
the amount of experimental data on which the material
model and the thermal process can be calibrated.
The temperature pattern within the first centimeter
of the section has the steepest temperature gradients
and is highly non-linear. In comparison to experimental data the temperature interpolation in the center of
the element (FLAC) of a discretisized model is linear.
Because of the accuracy of the calculated bending
moments and normal forces the relation of the height
to the length of the element as well as the number of
the Gauss integration points is a very important factor
for the relation of the internal forces from the stresses
of continuum elements. Therefore an optimum number
of elements as well as geometry of the elements
should be achieved in order not to falsify the calculation results.
Local phenomena like spalling and local loss of
thermal protection, which lead to irregular temperature
variation within the cross-section of a concrete lining,
are factors which influence the results considerably.
These effects are not considered in this paper.
The internal forces, especially the moments are
considerably influenced by the rate of temperature
spread. All calculations show that the moments are
predominately effected within the first minutes of a
fire case as soon the concrete has the full stiffness and
stress reception capability. The negative moments
(tensile stresses soil-sided) increase rapidly and afterwards decrease slowly because of the reduction of the
stiffness and loss of stress reception capability within
the heated zones of the lining. The positive moments
(tensile stresses cavity-sided) show the same trends
and can change their sign in dependence of the initial
stress state. These extreme values can provide important information for dimensioning the lining.
Within the first minutes of a fire load the normal
forces in the tunnel lining show the same trend as the
bending moments. As a result of fire loads a significant stress increase at the inside of the tunnel lining
can speed up the spalling of concrete.
REFERENCES
Itasca Consulting Group, Inc. 2000. FLAC – Fast Lagrangian
Analysis of Continua, Version 4.0 User’s Manual.
Minneapolis: Itasca.
Školska Knjiga, 1996. Inženjerski Priručnik, Zagreb:
Stručno-Znanstvena Redakcija Biblioteke.
Kusterle W., Waubke N.V., 2001. Baulicher Brandschutz –
Betontechnologie, Innsbruck: Institut für Baustoffe und
Bauphysik der Universität Innsbruck.
Gresslehner K.H., 2001. Festlegung der BEG-1 Kurve.
319
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-38.qxd
8/11/03
9:20 PM
Page 321
FLAC and Numerical Modeling in Geomechanics, Brummer et al. (eds)
© 2003 Swets & Zeitlinger, Lisse, ISBN 90 5809 581 9
Seismic liquefaction: centrifuge and numerical modeling
P.M. Byrne & S.S. Park
Department of Civil Engineering, University of British Columbia, BC, Canada
M. Beaty
Senior Engineer, Calif. Dept. of Water Resources, Sacramento, CA, USA
ABSTRACT: A fully coupled effective stress dynamic analysis procedure for modeling seismic liquefaction
is presented. An elastic plastic formulation is used for the constitutive model UBCSAND in which the yield loci
are radial lines of constant stress ratio and the flow rule is non-associated. This is incorporated into the 2D version
of FLAC by modifying the existing Mohr-Coulomb model. This numerical procedure is used to simulate centrifuge
test data from the Rensselaer Polytechnic Institute (RPI). UBCSAND is first calibrated to cyclic simple shear tests
performed on Nevada sand. Both pre- and post-liquefaction behavior is captured. The centrifuge tests are then
modeled and the predicted accelerations, excess porewater pressures, and displacements are compared with the
measurements. The results are shown to be in general agreement when stress densification and saturation effects
are taken into account. The procedure is currently being used in the design of liquefaction remediation measures
for a number of dam, bridge, tunnel, and pipeline projects in Western Canada.
1 INTRODUCTION
Displacements arising from seismic liquefaction can be
very large and are a major concern for earth structures
located in regions of moderate to high seismicity. Liquefaction is caused by high porewater pressures resulting from the tendency for granular soils to compact
when subjected to cyclic loading. Remedial measures
typically involve attempts to prevent or curtail liquefaction so that displacements are reduced to tolerable
levels. Modifications can also be made to the structure
so that larger displacements can be tolerated. In either
case, the rational design for remediation requires a
reliable prediction of soil-structure response during the
design earthquake.
State-of-practice procedures for evaluating liquefaction typically use separate analyses for liquefaction
triggering (e.g. Youd et al. 2001), flow slide (limit
equilibrium with residual strength), and displacements
(Newmark sliding block). While the results of the triggering evaluation are used as input into the flow slide
and displacement evaluations, the analyses are otherwise independent. While this practice often provides
a good screening level tool, these simplified total
stress analyses cannot reliably predict excess porewater pressures, accelerations, or displacement patterns.
State-of-art procedures involve dynamic finite element or finite difference analyses using effective stress
procedures coupled with fluid flow predictions. These
analyses can estimate the displacements, accelerations
and porewater pressures caused by a specified input
motion. Triggering of liquefaction, displacements and
flow slide potential are addressed in a single analysis.
Such analyses involve capturing the liquefaction behavior of a soil element as observed in laboratory tests,
and then modeling the soil-structure as a collection of
such elements subjected to the design earthquake base
motion.
It is vital that these sophisticated procedures be verified before they are used in practice. Instrumented
centrifuge model tests can be used for verification and
have some advantages over observed field behavior.
Centrifuge tests allow the measurement of displacements, input and induced accelerations, and porewater
pressures under field stress conditions. These tests can
therefore provide a useful database for verification of
numerical modeling. This approach is used below.
2 LIQUEFACTION
Liquefaction is caused by the tendency of granular soil
to contract when subjected to monotonic or cyclic shear
loading. When this contraction is prevented or curtailed
by the presence of water in the pores, normal stress is
transferred from the soil skeleton to the water. This
321
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
8/11/03
9:20 PM
Page 322
σv0
Shear Stress, τ
(a)
Shear Stress, τ
Plastic Shear Strain Increment, dγ p
09069-38.qxd
τ
u
Shear Strain, γ
(b)
Pore Pressure, u
Contraction
Strength Envelope
f
Elastic
Normal Effective Stress, s'
p
Plastic Volumetric Strain Increment, dεv
Dilation
Figure 2. Classic Mohr-Coulomb model.
τ , dγ p
Shear Strain, γ
(c)
Effective stress, σv
Plastic Strain
Increment Vector
σ'v0
f
Plastic Strain
Increment Vector
φd
B
A
Yield Locus
p
s', dεv
Shear Strain, γ
Figure 3. UBCSAND model.
Figure 1. Undrained response of loose sand in simple shear:
(a) stress–strain, (b) pore pressure, and (c) effective stress
response.
can cause high excess pore pressures resulting in a very
large reduction in shear stiffness. Large shear strains
may occur, and the soil will dilate with these strains
unless the soil is very loose. This dilation causes the
porewater pressure to drop and the stiffness to increase,
which can limit the strains, induced by a load cycle.
This behavior is illustrated in Figure 1 for monotonic
loading.
It is this tendency of the soil skeleton to contract and
dilate that controls its liquefaction response. Once the
skeleton behavior is modeled, the response under
drained, undrained or coupled stress-flow conditions
can be computed by incorporating the bulk stiffness and
flow of the pore fluid.
dilation angle, . This model is really too simple for
soils since plastic strains also occur for stress states
below the strength envelope. The UBCSAND stress–
strain model described herein modifies the MohrCoulomb model incorporated in FLAC to capture the
plastic strains that occur at all stages of loading. Yield
loci are assumed to be radial line of constant stress
ratio as shown in Figure 3. Unloading is assumed to be
elastic. Reloading induces plastic response but with a
stiffened plastic shear modulus.
The plastic shear modulus relates the shear stress and
the plastic shear strain and is assumed to be hyperbolic with stress ratio as shown in Figure 4. Moving
the yield locus from A to B in Figure 3 requires a plasP
tic shear strain increment, , as shown in Figure 4,
and is controlled by the plastic shear modulus, GP. The
associated plastic volumetric strain increment, dPv, is
obtained from the dilation angle :
3 CONSTITUTIVE MODEL: UBCSAND
(1)
The simplest realistic model for soil is the classic MohrCoulomb elastic–plastic model as depicted in Figure 2.
Soils are modeled as elastic below the strength envelope and plastic on the strength envelope with plastic
shear and volumetric strains increments related by the
The dilation angle is based on laboratory data and
energy considerations and is approximated by
322
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
(2)
09069-38.qxd
8/11/03
9:20 PM
Page 323
Stress Ratio, h (= τ /s’)
3.2
G p/
s'
The plastic properties used by the model are the peak
friction angle P the constant volume friction angle cv,
and plastic shear modulus GP, where
B
A
Plastic properties
(5)
Dg p
GPi
Ge and depends on relative density, is the
current shear stress, f is the projected shear stress at
failure, and Rf is the failure ratio used to truncate the
hyperbolic relationship.
The position of the yield locus d is known for each
element at the start of each time step. If the stress ratio
increases and plastic strain is predicted, then the yield
locus for that element is pushed up by an amount d
as given by Equation 6. Unloading of stress ratio is considered to be elastic. Upon reloading, the yield locus is
set to the stress ratio corresponding to the stress reversal
point.
Plastic Shear Strain, g p
Figure 4. Hyperbolic stress–strain relationship.
Shear Stress,
Dilation
Contraction
(6)
Normal Effective Stress,
Figure 5. Zones of shear-induced contraction and dilation.
where cv is the phase transformation or constant volume friction angle and d describes the current yield
locus. A negative value of corresponds to contraction.
Contraction occurs for stress states below cv and dilation above as shown in Figure 5. Additional information
on earlier but similar forms of UBCSAND is presented
by Puebla et al. (1997) and Beaty & Byrne (1998).
Elastic and plastic properties for the model are
defined as follows.
3.1
Elastic properties
The elastic bulk modulus, B, and shear modulus, Ge,
are assumed to be isotropic and stress level dependent.
They are described by the following relations where kB
and kG are modulus numbers, PA is atmospheric pressure, and m is the mean effective stress:
(3)
(4)
The elastic and plastic parameters are highly dependent on relative density, which must be considered in any
model calibration. These parameters can be selected
by calibration to laboratory test data. The response of
the model can also be compared to a considerable database for triggering of liquefaction under earthquake
loading in the field. This database exists in terms of
penetration resistance, typically from cone penetration
(CPT) or standard penetration (SPT) tests. A common
relationship between (N1)60 values from the SPT and
the cyclic stress ratio that triggers liquefaction for
a magnitude 7.5 earthquake is given by Youd et al.
(2001). Comparing laboratory data based on relative
density to field data based on penetration resistance
relies upon an approximate conversion, such as that
proposed by Skempton (1986):
(7)
Model parameters based on penetration resistance
and field observation may be useful for field conditions
where it is very difficult to retrieve and test a representative sample. However, this indirect method is not
appropriate for simulation of centrifuge models. Calibrations for this case should be based on direct laboratory testing of samples that are prepared in the same
manner as the centrifuge model.
323
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-38.qxd
8/11/03
9:20 PM
Page 324
Shear Stress (kPa)
20
15
10
5
0
-5
-10
-15
-20
Test
0
20
(b)
15
10
5
0
-5
-10
-15
-20
-20 -15
Test
Shear Stress (kPa)
Calibration
20
40
60
80
Vertical Effective Stress (kPa)
20
15 (b)
10
5
0
-5
-10
-15
-20
-20 -15
100
Drc=40% CSR=0.15
Test
-10
-5
0
5
Calibration
10
15
20
Figure 7. Stress path and stress–strain relationship
(CSR 0.15).
0.2
UBCSAND
Dr=44%
Dr=40%
0.15
0.1
0.05
Test: Dr=40%
Test: Dr=44%
0
Calibration
20
40
60
80
Vertical Effective Stress (kPa)
Drc=40% CSR=0.15
(a)
Shear Strain (%)
Drc=40% CSR=0.1
(a)
20
15
10
5
0
-5
-10
-15
-20
0
Cyclic Stress Ratio (CSR)
Shear Stress (kPa)
A number of cyclic simple shear tests have been conducted on Fraser River sand at the University of British
Columbia. The samples were prepared by air pluviation with a target relative density Dr of 40% and tested
at an initial vertical effective stress, v0, of 100 kPa.
Samples were also tested at v0 of 200 kPa with a Dr of
44%. Samples were subjected to cyclic shear under
constant volume conditions that simulate undrained
response at a range of cyclic stress ratios. Typical
examples of measured response are shown in Figures 6
& 7. From Figure 6a it may be seen that as the shear
stress is cycled, the effective stresses decrease as the
pore pressure ratio ru increases. This ratio ru is given by
(u – u0)/v0, where u0 and u are the initial and current
pore pressures. ru approaches unity after 5 cycles,
which corresponds to a state of zero effective stress.
Application of further cycles produce very large shear
strains in the range of 10 to 15% or more as shown in
Figure 6b. However, the strain per cycle is limited as
the pore pressures drop with strain due to dilation.
Figures 6 & 7 also show the response predicted
using UBCSAND. The elastic and plastic parameters
selected by the calibration were the same for both
tests. The model gives a reasonable representation of
the observed response, although the final predicted
strains are less than measured for Figure 6. A summary
Shear Stress (kPa)
4 SIMULATION OF CYCLIC ELEMENT
TEST DATA
1
100
10
No. of Cycles to Liquefaction
100
Figure 8. Predicted and measured liquefaction response of
Fraser River sand.
Drc=40% CSR=0.1
of the test results and the UBCSAND calibration are
shown in Figure 8. The predicted and measured liquefaction response for v0 of 100 and 200 kPa is in close
agreement.
Test
-10
-5
0
Calibration
5
10
15
5 CENTRIFUGE TESTS
20
Shear Strain (%)
Figure 6. Stress path and stress–strain relationship
(CSR 0.1).
A simulation using UBCSAND was made of 2 centrifuge tests carried out at RPI as described in Table 1.
In the centrifuge test, a small model is used that is
subjected to a high acceleration field during the test.
324
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-38.qxd
8/11/03
9:20 PM
Page 325
This has the effect of increasing its stresses by the
ratio of the induced acceleration divided by the acceleration of gravity. This ratio or factor is 120 for
Model 1 and 60 for Model 2 as indicated by Table 1.
The centrifuge model under the increased acceleration
field can also be thought of as representing a prototype
Table 1. Centrifuge model tests.
Test condition
Dr
Centrifuge acc.
Max. v
Soil depth
Fluid viscosity
RPI Model 1
RPI Model 2
Level
55%
120 g
380 kPa
38 m
60 w
Slope
40%
60 g
100 kPa
10 m
60 w
Cyclic Stress Ratio (CSR)
0.5
UBCSAND
Dr=44%
Dr=62%
Dr=88%
Test: Dr=43-46%
Test: Dr=60-63%
Test: Dr=86-89%
0.4
0.3
that is 120 (Model 1) or 60 (Model 2) times larger
than the actual model. Results from the centrifuge test
can be presented at either the model or prototype scale.
The prototype scale is used for this paper.
While in flight, a motion simulating an earthquake
time history is applied to the base of the model. For
dynamic similitude at the model scale, the earthquake
time scale must be decreased by a factor of 120 (Model
1) or 60 (Model 2), and the earthquake acceleration
increased by the same factor. The engineering coefficient of permeability k will also increase by this same
factor due to the increased unit weight of the fluid. k
should be decreased for hydraulic similitude, although
it is not necessary to model a specific k. It is common
to use a fluid in the test that is 30 to 60 times more viscous than water to prevent rapid rates of dissipation
that might unduly curtail liquefaction effects.
Nevada sand was used for these centrifuge tests
and its liquefaction and permeability (at 1 g using
water as pore fluid) properties were obtained from
laboratory tests (Arulmoli et al. 1992, Kammerer
et al. 2000, Taboada-Urtuzuastegui et al. 2002). Its
measured liquefaction resistance together with the
UBCSAND prediction is shown in Figure 9.
5.1
0.2
0.1
0
1
10
No. of Cycles to Liquefaction
100
Figure 9. Liquefaction resistance of Nevada sand.
Model 1
Model 1 comprises a uniform horizontal sand layer
having a thickness of 37 m (prototype scale) and a
placement density Dr of 55% as shown in Figure 10
(Gonzalez et al. 2002). After application of the 120 g
acceleration field, Dr was estimated to increase to 63%
near the base due to the increase in stresses. The amount
of densification was estimated from one-dimensional
compression tests. The applied base motion is shown
(a) Centrifuge Model 1
(b) FLAC Model 1
120 g
Measurements
P7
Ac5
P8
Z = 0.0 m
Z = 1.3 m
Z = 6.3 m
P5
Ac4
P6
Z = 13.1 m
Ac3
P4
Z = 24.8 m
Ac2
P3
Ac1
P2
Ac7
Ac6
Navada sand
(Dr=55%)
P1
Ac8
Input Motion: 50 cycles, 0.2g, 1.5Hz
Pore Pressure Transducer
Accelerometer
Figure 10. Centrifuge Model 1 and FLAC Model 1.
325
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
Z = 30.8 m
Z = 37.0 m
Z = 38.1 m
09069-38.qxd
8/11/03
9:21 PM
Page 326
0.3
Centrifuge Input
Numerical Input
Acceleration (g)
0.2
0.1
0
-0.1
-0.2
-0.3
0
10
20
Time (Sec)
30
40
Figure 11. Based input motions of Model 1.
Table 2. Key input for Model 1 numerical analysis.
kB
Top
Middle
Bottom
952
1020
1042
2856
3060
3126
0.44
0.61
0.67
Permeability
(m/sec)
0.2 E5
0.6 E5
1.2 E5
5 E-5
5 E-5
5 E-5
EPP (kPa)
kG
Bf after
spinup
(kPa)
0.4
0.2
0
-0.2
-0.4
0.4
0.2
0
-0.2
-0.4
30
40
200
150
Depth = 24.8m
100
-- σ' vo
0
EPP (kPa)
0
P(depth=6.3m)
10
20
30
350
300
250
200
150
100
50
0
40
Depth = 30.8m
-- σ' vo
0
M(depth=13.1m)
20
50
P(depth=1.3m)
M(depth=6.3m)
10
250
P (prediction)
M(depth=1.3m)
Depth =13.1m
300
10
20
30
40
P(depth=13.1m)
400
EPP (kPa)
Acc (g)
Acc (g)
0.4
0.2
0
-0.2
-0.4
Acc (g)
0.4
0.2
0
-0.2
-0.4
Acc (g)
Acc (g)
Acc (g)
M (measurement)
0.4
0.2
0
-0.2
-0.4
0.4
0.2
0
-0.2
-0.4
Prediction
-- σ' vo
0
EPP (kPa)
Layer
Measurement
140
120
100
80
60
40
20
0
P(depth=24.8m)
M(depth=24.8m)
300
200
Depth = 37.0m
100
0
-- σ' vo
0
10
20
30
40
Time (sec)
0
10
M(depth=30.8m)
P(depth=30.8m)
M(depth=37.0m)
P(depth=37.0m)
20
Time (sec)
30
Figure 12b. Measured and predicted excess pore pressures
of Model 1.
40
10
20
Time (sec)
30
40
Figure 12a. Measured (left) and predicted (right) accelerations of Model 1.
in Figure 11 and consisted of 50 cycles with an amplitude of 0.2 g and a frequency of 1.5 Hz. The key inputs
including water bulk stiffness (Bf) for different layers
in the numerical model are listed in Table 2.
The container for Model 1 consisted of slip “rings”
that allowed differential horizontal displacements in
the vertical direction but not in the horizontal. This
was simulated in the FLAC model by “attaching” the
vertical sides, Figure 10. The initial horizontal effective stresses were set to 0.5 times the vertical effective
stresses.
The measured and predicted excess pore pressures
and accelerations for various depths are shown in
Figure 12. The predicted accelerations are initially
about the same at all depths and approximately equal to
the base input value of 0.2 g. The accelerations decrease
326
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-38.qxd
8/11/03
9:21 PM
Page 327
Figure 13. Cross section of Model 2 (Taboada-Urtuzuastegui et al. 2002).
over much of the model as the shaking continues. The
decay of acceleration is most rapid in the upper layers
and can be explained in terms of the excess porewater
pressures shown in Figure 12b. A large drop in acceleration response occurs when the measured excess pore
pressure reaches the initial vertical effective stress v0,
which corresponds to a liquefied state. Measurements
show that liquefaction occurs first near the surface and
then progresses downward. The accelerations and
excess pore pressures predicted using UBCSAND are
in generally good agreement with the measurements.
The analysis described above incorporates the effect
of densification due to the increased acceleration field.
If this effect is not considered, and a uniform Dr of
55% is used in the analysis, then liquefaction is predicted to occur first at the base of the model rather
than at the surface. The higher Dr at the base reverses
this trend and indicates the importance of stress densification in centrifuge tests.
Full saturation of the pores is difficult to achieve in a
centrifuge test. The best fit with the data was obtained
assuming an initial placement saturation, or Sr, of 98%
at atmospheric pressure. The pore pressure will increase
as the centrifuge acceleration is applied, and the resulting increase in Sr is modeled using the gas laws.
In summary,
(a) UBCSAND provides a reasonable agreement to
the test results,
(b) ru 1.0 and liquefaction can occur at depths of
40 m in medium dense sand strata,
(c) a large reduction in the accelerations can occur
upon liquefaction,
(d) the effect of stress densification should be
included, and
(e) the degree of saturation, Sr, must be considered.
Table 3. Key input for Model 2 numerical analysis.
Layer
kG
kB
Free field
867
2601
5.2
Permeability
(m/sec)
1.0 E5
2.1 E-5
Model 2
The cross section for Model 2 is shown in Figure 13
and comprises a steep 1.5:1 slope in loose fine sand
with Dr 40% (Taboada-Urtuzuastegui et al. 2002).
The base motion consists of 20 cycles of 0.2 g at a frequency of 1 Hz. The container for model 2 was rigid
and this was simulated in the FLAC model by applying the input motion to the vertical sides as well as the
base. The key inputs for Model 2 are listed in Table 3.
Pore pressures and accelerations were measured away
from the face of the slope, approximating free field
conditions, as well as adjacent to the slope.
The predicted and observed accelerations and pore
pressures in the free field are shown in Figures 14 & 15.
As expected, similar trends are seen as for the level
ground test of Model 1, i.e. ru of 100% and reduced
accelerations.
The accelerations and pore pressures near the
slope are shown in Figures 16 & 17. It may be seen in
Figure 16 that there is little or no reduction in the
accelerations. Instead, large upslope acceleration spikes
occur. Excess pore pressures are shown in Figure 17.
Large negative excess pore pressure spikes occur that
coincide in time with the upslope acceleration spikes.
The slope is steep and the upslope acceleration of the
base tends to induce failure of the slope and relative
327
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
0.22
Bf after
spinup
(kPa)
09069-38.qxd
8/11/03
9:21 PM
Page 328
0.2
0.2
0.0
-0.2
0
(a)
Input
0.4
Input
-0.2
AH1
0.4
Acceleration (g)
0.0
0
-0.4
(a)
-0.4
0.8
0.4
0
-0.4
-0.8
0.8
0.4
0
-0.4
-0.8
AH1
0.8
0.4
0.0
-0.4
-0.8
0.8
0.4
0.0
-0.4
-0.8
(b)
AH5
(Taboada-Urtuzuastegui et al. 2002)
(c)
AH6
0
5
10
Time (sec)
15
20
AH5
AH6
5
10
Time (sec)
15
20
Figure 14. Measured (left) and predicted (right) accelerations at free field.
80
80
Excess pore pressure (kPa)
40
40
PP1
0
(a)
PP1
0
40
40
20
20
PP5
(b)
0
PP5
0
ru = 1.0
20
20
10
10
PP6
(Taboada-Urtuzuastegui et al. 2002)
0
-5
0
5
10
Time (sec)
15
(c)
0
PP6
5
20
10
Time (sec)
15
20
Figure 15. Measured (left) and predicted (right) excess pore pressures at free field.
downslope movement. The soil dilates as it shears in
the downslope direction, producing negative pore
pressures which stiffen the shear modulus. Enough
strength is mobilized through this dilation to arrest the
downslope movement and gives rise to the acceleration spike (Taboada-Urtuzuastegui et al. 2002).
UBCSAND provides a reasonable prediction of
the accelerations and pore pressure response for the
328
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-38.qxd
8/11/03
9:21 PM
Page 329
0.2
0.2
0.0
0
-0.2
(a)
Input
-0.2
AH2
0.4
0.4
Acceleration (g)
Input
0.0
0
-0.4
-0.4
(b)
AH2
0.2
0.0
-0.2
-0.4
-0.6
AH4
0.4
(Taboada-Urtuzuastegui et al. 2002)
(c)
0.2
0
-0.2
-0.4
-0.6
0.0
0
-0.4
(d)
AH7
0
5
10
Time (sec)
15
AH7
0.4
-0.4
-0.8
AH4
-0.8
5
20
10
Time (sec)
15
20
Figure 16. Measured (left) and predicted (right) accelerations near the slope.
20
20
PP2
10
10
0
PP2
Excess pore pressure (kPa)
0
30
(a)
-10
30
20
20
10
10
PP3
0
PP3
(b)
20
0
20
0
0
PP4
-20
-20
PP4
(c)
ru = 1.0
10
0
-10
-20
-30
10
0
-10
-20
-30
PP7
(Taboada-Urtuzuastegui et al. 2002) (d)
0
5
10
Time (sec)
15
PP7
5
20
Figure 17. Measured (left) and predicted (right) excess pore pressures near the slope.
329
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
10
Time (sec)
15
20
09069-38.qxd
8/11/03
9:21 PM
Page 330
Displacement unit : m
Test No.1
Test Conditions: 60g,
60 times viscosity of water
Max. Acceleration: 0.25g
Magnitude
1.91+
1.74 to1.91
1.58 to1.74
1.41 to1.58
1.24 to1.41
1.08 to1.24
0.91 to1.08
0.75 to 0.91
0.58 to 0.75
0.41 to 0.58
0.25 to 0.41
0.08 to 0.25
10
10
8
8
6
6
4
4
2
2
0
50
0
45
40
35
35
30
25
20
15
10
5
0
Figure 18. Measured displacements for Model 2 from centrifuge test (Taboada-Urtuzuastegui et al. 2002).
Maximum Displacement = 2.6 m
Figure 19. Predicted displacements for Model 2 using UBCSAND.
free field. More significant differences are observed
for locations near the slope. Some of these differences
are due to UBCSAND under predicting the dilative
spikes. This requires further investigation. The measured and predicted displacements after shaking are
shown in Figures 18 & 19. It may be seen that both the
magnitude and pattern of displacements are in general agreement.
In summary,
(a) UBCSAND provides reasonable agreement with
this centrifuge test, although further study is
needed for locations close to the sloping face,
(b) a decrease in accelerations after liquefaction was
not observed near the slope,
(c) a large upslope acceleration spikes occurred near
the slope,
(d) a decrease in pore pressure due to dilation corresponded with these upslope acceleration spikes, and
(e) the dilative spikes prevented very large displacements from occurring in this homogeneous fine
sand model.
6 SUMMARY
A fully coupled effective stress dynamic analysis
procedure has been presented. The procedure is first
calibrated by comparison with laboratory element
test data and then verified by comparison with two
centrifuge model tests.
Model 1 represented a deep sand layer with a level
ground condition. This model showed that high excess
porewater pressure and liquefaction can occur to
depths of 40 m in medium dense sands. Liquefaction
first occurred at the surface and progressed downward under continued shaking. Accelerations above
330
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-38.qxd
8/11/03
9:21 PM
Page 331
the depth of liquefaction showed a significant
decrease. The numerical model results were in good
agreement with the measurement when stress densification and saturation effects were included.
Model 2 represented a steep slope condition in
homogeneous loose fine sand. The results showed that
large upslope acceleration spikes occurred near the face
of the slope after liquefaction. These acceleration
spikes corresponded with large negative excess pore
pressure spikes associated with dilation. It is the
increase in effective stress associated with these negative pore pressure spikes that curtails the displacements
and makes the slope more stable than might be expected
under cyclic loading. The overall pattern of predicted
response is in reasonable agreement with the measurements, although both the acceleration and pore pressure
spikes are under predicted by the UBCSAND analysis.
A new series of centrifuge tests are planned at
CCORE (Centre for Cold Ocean Research), Memorial
University, Newfoundland, which will permit further
verification and refinement of the numerical model.
REFERENCES
Arulmoli, K., Muraleetharan, K.K., Hossain, M.M. & Fruth,
L.S. 1992. VELACS laboratory testing program, soil data
report. The Earth Technology Corporation, Irvine,
California, Report to the National Science Foundation,
Washington D.C., March.
Beaty, M. & Byrne, P. 1998. An effective stress model for
predicting liquefaction behaviour of sand. ASCE Geot.
Special Pub. No. 75: 766–777.
Gonzalez, L., Abdoun, T. & Sharp, M.K. 2002. Modeling of
seismically induced liquefaction under high confining
stress.
Kammerer, A., Wu, J., Pestana, J., Riemer, M. & Seed, R.
2000. Cyclic simple shear testing of Nevada sand for
PEER Center project 2051999. Geotechnical Engineering
Research Report No. UCB/GT/00-01, University of
California, Berkeley, January.
Puebla, H., Byrne, P.M. & Phillips, R. 1997. Analysis of
CANLEX liquefaction embankments: prototype and
centrifuge models. Can. Geotech. Journal, Vol. 34, No. 5:
641–657.
Skempton, A.W. 1986. Standard penetration test procedures
and the effects in sands of overburden pressure, relative
density, particle size, ageing and overconsolidation,
Geotechnique 36, No. 3: 425–447.
Taboada-Urtuzuastegui, V.M., Martinez-Ramirez, G. &
Abdoun, T. 2002. Centrifuge modeling of seismic behavior of a slope in liquefiable soil, Soil Dynamic and
Earthquake Engineering, Vol. 22: 1043–1049.
Youd, T.L., Idriss, I. M., Andrus, R.D., Arango, I., Castro, G.,
Christian, J.T., Dobry, R., Finn, W.D.L., Harder Jr., L.F.,
Hynes, M.E., Ishihara, K., Koester, J.P., Liao, S.,
Marcuson III, W.F., Martin, G.R., Mitchell, J.K.,
Moriwaki, Y., Power, M.S., Robertson, P.K., Seed, R.B. &
Stokoe, K.H. 2001. Liquefaction Resistance of Soils:
Summary Report from the 1996 NCEER and 1998
NCEER/NSF Workshops on Evaluation of Liquefaction
Resistance of Soils. ASCE J. of Geot. and Geoenv. Eng.,
Vol. 127, No. 10: 817–833.
331
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-39.qxd 08/11/2003 20:43 PM Page 333
FLAC and Numerical Modeling in Geomechanics, Brummer et al. (eds)
© 2003 Swets & Zeitlinger, Lisse, ISBN 90 5809 581 9
Modeling the dynamic response of cantilever earth-retaining
walls using FLAC
R.A. Green
Department of Civil and Environmental Engineering, University of Michigan, Ann Arbor, MI, USA
R.M. Ebeling
Information Technology Laboratory, US Army Engineer Research and Development Center, Vicksburg, MS, USA
ABSTRACT: A research investigation was undertaken to determine the dynamically induced lateral earth pressures on the stem portion of a concrete, cantilever, earth-retaining wall. In total, the wall-soil column system was
68.6 m in height, with the upper 6.1 m being composed of the cantilever wall retaining compacted backfill. A series
of numerical analyses were performed using FLAC. The analyses consisted of the incremental construction of the
wall and placement of the backfill, followed by dynamic response analyses, wherein the soil was modeled as elastoplastic. This paper outlines the details of the numerical model used in the analyses. Particular attention is given to
how the ground motion was specified, determination of the wall and soil model parameters, and the modeling of the
wall-soil interface. To benchmark the FLAC results, comparisons are presented between the FLAC results and the
results from simplified techniques for computing dynamic earth pressures and permanent wall displacement.
1 INTRODUCTION
1.1
Scope
A research investigation using FLAC was undertaken to
determine the dynamically induced lateral earth pressures on the stem portion of a concrete, cantilever,
earth-retaining wall. The analyses consisted of the
incremental construction of the wall and placement of
the backfill, followed by dynamic response analyses,
wherein the soil was modeled as elasto-plastic with a
Mohr-Coulomb failure criterion. The focus of this
paper is to outline the details of the numerical model
used in the analyses. Particular attention is given to how
the ground motions were specified, the wall and soil
model parameters were determined, and the wall-soil
interface was modeled. To assess the validity of the proposed FLAC model, comparisons of the FLAC results
are made with results from simplified analysis techniques for determining dynamic earth pressures (i.e.,
Mononobe-Okabe approach) and for determining permanent displacement of the wall (i.e. Newmark sliding
block approach).
1.2
Description of wall-soil system
The retaining wall analyzed was approximately 6.1 m
in height, retaining medium-dense, cohesionless, compacted fill (total unit weight: t 19.6 kN/m3; effective
angle of internal friction: 35°). Underlying the
wall/backfill was approximately 62.5 m of naturally
deposited dense cohesionless soil (t 19.6 kN/m3;
40°). The groundwater table was well below the
base of the wall and was not considered in the analyses.
The geometry and structural detailing of the wall
were determined following the US Army Corps of
Engineers static design procedures (Headquarters, US
Army Corps of Engineers 1989, 1992), with the dimensions of the structural wedge (i.e. wall and contained
backfill) depicted in Figure 1. The properties of the concrete and reinforcing steel used in the wall design are as
follows: unit weight of concrete: c 23.6 kN/m3; compressive strength of concrete: fc 27.6 MPa; and yield
strength of reinforcement: fy 413.4 MPa. Additional
details about the wall design and soil profile are given
in Green & Ebeling (2002).
2 NUMERICAL MODEL
2.1
The FLAC numerical model consisted of the upper
9.1 m of the wall-soil system, comprising the wall/backfill and approximately 3 m of the underlying natural
deposit (foundation soil). Laterally, the FLAC model
was approximately 22.9 m, to include approximately
7.6 m of the foundation soil in front of the wall and
333
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
Overview of FLAC model
09069-39.qxd 08/11/2003 20:43 PM Page 334
be specified along the lateral edges of the model (freefield boundary conditions cannot be specified across
the interface of two sub-grids). Sub grid four was
included for symmetry, but its inclusion was not necessary. The sub-grids were “attached” at the soil-to-soil
interfaces, as depicted by white lines in Figure 2, and
interface elements were used at the wall-soil interfaces.
The following sub-sections outline how the ground
motions were specified and the procedures used to
determine the various soil and wall model parameters.
0.2 m
0.5m
2.4m
0.9m
Stem
6.1m
Backfill
2.2
0.6 m
Toe
Heel
Base
4m
Figure 1. Dimensions of the structural wedge of the wall-soil
system analyzed, wherein the term “structural wedge” refers to
all that is shown above.
7.6 m
3m
2
3
4
9.1 m
6.1 m
15.3 m
1
22.9 m
Figure 2. Annotated FLAC model of the wall-soil system.
approximately 15.3 m of the backfill/foundation soil
behind the wall (Fig. 2).
An elasto-plastic constitutive model, in conjunction
with Mohr-Coulomb failure criterion, was used to
model the soil. Elastic beam elements were used to
model the concrete retaining wall, with the wall/backfill being “numerically constructed” in FLAC similar
to the way an actual wall would be constructed. The
backfill was placed in 0.61 m lifts, for a total of ten
lifts, with the model being brought to static equilibrium after the placement of each lift. Such placement
allowed realistic earth pressures to develop as the wall
deformed and moved because of the placement of each
lift. The constructed retaining wall-soil model is shown
in Figure 2.
The model consists of four sub-grids, labeled one
through four in Figure 2. The separation of the foundation soil and backfill into sub-grids one and two was
required because a portion of the base of the retaining
wall was inserted into the soil. Sub-grid three was
included so that free-field boundary conditions could
Dynamic analyses can be performed with FLAC,
wherein user-specified acceleration, velocity, stress, or
force time-histories can be input as exterior boundary
conditions or as interior excitations. A parametric study
was performed to determine the best way to specify
the ground motions in FLAC for earthquake analyses.
The parametric study involved performing a series of
one-dimensional (1-D) site response analyses using
consistently generated acceleration, velocity, and stress
time-histories. Generally, earthquake ground motions
are not defined in terms of force time-histories and
therefore were not considered in the parametric study.
The use of stress time-histories in FLAC has the benefit
of allowing the time-history to be specified at “quiet
boundaries,” thus simulating radiation damping.
Using a free-field acceleration time-history recorded
at the surface of a USGS site class B profile during
the 1989 Loma Prieta earthquake, a 1-D site response
analysis was performed using a modified version of
SHAKE91 (Idriss & Sun 1992). The analysis was
performed on a 68.6 m, 5% damped, non-degrading
profile, wherein the acceleration time-history was
specified as an outcrop motion. Interlayer acceleration and stress time-histories were computed at the
profile surface and at depths of 7.6 m, 10.7, 15.2,
and 68.6 m (i.e. bedrock). Interlayer velocity timehistories were computed by integrating the interlayer
acceleration time-histories using the trapezoidal rule.
The interlayer acceleration, velocity, and stress timehistories were used as base motions in a series of
FLAC analyses, in which the acceleration timehistories at the surface of the FLAC profiles were
computed. The profiles used in the FLAC analyses
were comparable to the SHAKE profiles down to the
depths corresponding to the interlayer motions. An
elastic constitutive relation, with 5% Rayleigh damping, was used to model the soil layers in the FLAC
profiles. The central frequency of the damping relationship was set to the fundamental frequencies of the
respective FLAC profiles.
Fourier amplitude spectra (FAS) and 5% damped,
pseudo acceleration response spectra (PSA) were
computed from the acceleration time-histories of the
surface motions of the SHAKE and FLAC profiles.
334
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
Specification of input motions
09069-39.qxd 08/11/2003 20:43 PM Page 335
Error analyses were performed on the spectra corresponding to the different profiles and different types
of specified input motions. In the error analyses, the
spectra for the SHAKE motions were used as the
“correct” motions. The word “correct” does not imply
that SHAKE precisely models the behavior of an actual
soil profile subjected to earthquake motions. Rather,
SHAKE gives the analytically correct motion for a
visco-elastic profile with constant damping applied to
all frequencies of motion. On the other hand, the FLAC
models used in this study give numerical approximations of the correct analytical solution. The errors in
the FLAC spectral values were computed at a spectrum of frequencies using the following expressions.
(1a)
(1b)
From the results of the parametric study, it was
determined that the specification of the input motion
in FLAC in terms of stress time-histories gives the
least accurate results, wherein the stress timehistories were applied at a “quiet boundary” along the
base of the FLAC model. The errors corresponding to
specifying the motions in terms of acceleration and
velocity time-histories were essentially identical and
considerably less than those associated with the stress
time-histories.
2.3
had little energy at higher frequencies. The interlayer
motion (at 9.1 m depth) computed using SHAKE was
specified as an acceleration time-history along the
base of the FLAC model.
2.4
Model parameters for soil
The stress-strain behavior of the soil was modeled using
the Mohr-Coulomb constitutive model. Four parameters are required for the Mohr-Coulomb model: effective internal friction angle (); mass density (); shear
modulus (G); and bulk modulus (K). The first two
parameters (i.e., and ) are familiar to geotechnical engineers, where mass density is the total unit
weight of the soil (t) divided by the acceleration due
to gravity (g), i.e. t/g. As stated previously, for the foundation soil was 40° and 35° for the backfill. These values are consistent with dense natural
deposits and medium-dense compacted fill. G and K
may be less familiar to geotechnical engineers; therefore, their determination is outlined below.
Several correlations exist that relate G to other
soil parameters. However, the most direct relation is
between G and shear wave velocity (vs):
(2)
s may be determined by various types of site characterization techniques, such as cross hole or spectral
analysis of surface waves (SASW) studies.
Values for K can be determined from G and
Poisson’s ratio (v) using the following relation:
Development of input motions for
wall analyses
(3)
As stated previously, the FLAC model of the soil-wall
system consisted of only the upper 9.1 m of a 68.6 m
profile. To account for the influence of the soil profile
below 9.1 m on the ground motions, the entire 68.6 m
profile, without the retaining wall, was modeled using
a modified version of SHAKE91. The interlayer motion
at the depth corresponding to the base of the FLAC
model (i.e. 9.1 m) was computed. The input ground
motion used in the SHAKE analysis was the same
Loma Prieta motion used in the parametric study discussed above. The motion was specified as a rock outcrop motion at the base of the 68.6 m soil column.
The small strain fundamental frequency of the
retaining wall-soil system in the FLAC model was
estimated to be approximately 6 Hz. At larger strains,
the fundamental frequency of the system will be less
than the small strain value. To ensure proper excitation of the wall, the cutoff frequency in the SHAKE
analysis was set at 15 Hz. This value was selected
considering both the fundamental frequency of the
wall-soil system and the fact that the input motion
v may be estimated using the following expression:
(4)
which was derived from the theory of elasticity (e.g.
Terzaghi 1943), in conjunction with the correlation
relating Ko and proposed by Jaky (1944), i.e.
Ko 1 sin(). Using the above expression, v was
determined to be 0.26 and 0.3 for the foundation soil
and backfill, respectively.
2.5
335
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
Model parameters for wall
The concrete wall was divided into five segments
having constant parameters, as illustrated in Figure 3,
with each segment consisting of several 0.3 m elastic
beam elements. Four parameters were required to
define the mechanical properties of the elastic beam
09069-39.qxd 08/11/2003 20:43 PM Page 336
2.4 m
1.5 m
1.5 m
Beam
Elements
1
Beam
Elements
2
1.5 m
3
Interface
Elements
6.1m
6.1m
1.5 m
2.4 m
1.5 m
No Interface
Elements
1.5 m
4
5
4m
4m
Figure 3. Numerical model of retaining wall using elastic
beam elements.
elements: cross sectional area (Ag); mass density ();
elastic modulus (Ec); and second moment of area (I ),
commonly referred to as moment of inertia.
The basis for subdividing the wall into five segments was the variation of the mechanical properties
in the wall. A wall having a greater taper or largely
varying steel reinforcement along the length of the
stem or base would likely require more segments.
For each of the segments, Ag and were readily
determined from the wall geometry and the unit weight
of the concrete (i.e. 23.6 kN/m3). Ec was computed
using the following expression (e.g. MacGregor 1992):
(5)
In this expression, f c is the compressive strength of
the concrete (e.g. 4000 psi for the wall being modeled),
and both Ec and f c are in psi. Because the structure is
continuous in the direction perpendicular to the analysis plane, Ec computed using Equation 5 needed to be
modified to account for plane-strain conditions. This
modification was done using the following expression
(Itasca 2000, FLAC Structural Elements Manual).
(6)
where 0.2 was assumed for Poisson’s ratio for concrete.
I is a function of the geometry of the segments, the
amount and location of the reinforcing steel, and the
amount of cracking in the concrete, where the latter in
turn depends on the static and dynamic load imposed
Figure 4. Location of interface elements in the FLAC model.
on the member. In dynamic analyses, it is difficult to
state a priori whether the use of sectional properties
corresponding to uncracked, fully cracked, or some
intermediate level of cracking will result in the largest
demand on the structure. However, I 0.4 Iuncracked
was used as a reasonable estimate for the sectional
properties (Paulay & Priestley 1992).
2.6
336
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
Model parameters for wall-soil interface
Interface elements were used to model the interaction
between the concrete retaining wall and the soil.
However, FLAC does not allow interface elements to
be used at the intersection of branching structures
(e.g. the intersection of the stem and base of the cantilever wall). Several approaches were attempted by
the authors to circumvent this limitation in FLAC, with
the simplest and best approach, as found by the authors,
illustrated in Figure 4. As shown in this figure, three
very short beam elements, oriented in the direction of
the stem, toe side of the base, and heel side of the
base, were used to model the base-stem intersection.
No interface elements were used on these three short
beam elements. However, interface elements were used
along the other contact surfaces between the soil and
wall, as depicted by the hatched areas in Figure 4.
A schematic of the FLAC interface element is presented in Figure 5. As may be observed from this figure,
the interface element has four parameters: S slider
representing shear strength; T tensile strength;
kn normal stiffness; and ks shear stiffness. The
element allows permanent separation and slip of the
soil and the structure, as controlled by the parameters
09069-39.qxd 08/11/2003 20:43 PM Page 337
Side A of Interface
zone
ks
600
τult
500
τf
400
grid point
T
τ (psf)
grid point
S
700
zone
kn
zone
Side B of Interface
Ksi
ks
300
hyperbolic
model
FLAC
model
200
100
Figure 5. Schematic of the FLAC interface element (adapted
from Itasca 2000).
T and S, respectively. For the cohesionless soil being
modeled, T 0, while S was specified as a function
of the interface friction angle ( ). For medium-dense
sand against concrete, 31° (Gomez et al. 2000b).
As a rule-of-thumb, the FLAC manual (Itasca 2000,
Theory and Background Manual) recommends that kn
be set to ten times the equivalent stiffness of the
stiffest neighboring zone, i.e.:
0.000 r 0.002
0.008
0.010
Figure 6. Calibration of the FLAC interface model to the
hyperbolic-type model proposed by Gomez et al. (2000a,b).
where,
(8b)
(8c)
Ksi dimensionless interface initial shear stiffness
of the interface; n normal stress acting on the
interface (determined iteratively in FLAC by first
assuming a small value for ks and then constructing
the wall); interface friction angle 31°; Rfj failure ratio 0.84; KI dimensionless interface
stiffness number for initial loading 21000;
nj dimensionless stiffness exponent 0.8; w unit weight of water in consistent units as r; and
Pa atmospheric pressure in the same units as n.
The values for Rfj, KI, nj, and were obtained from
Gomez et al. (2000a).
2. ks was computed using the following expression:
1. Compute r using the following expression.
(8a)
337
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
0.006
s (ft)
(7)
In Equation 7, K and G are the bulk and shear
moduli, respectively, and zmin is the smallest width
of a zone in the normal direction of the interfacing
surface. The max[ ] notation indicates that the maximum value over all zones adjacent to the interface be
used. The FLAC manual warns against using arbitrarily large values for kn, as is commonly done in finite
element analyses, as this results in an unnecessarily
small time step, and therefore unnecessarily long
computational times.
The determination of the ks required considerably
more effort than the determination of the other interface
element parameters. In shear, the interface element in
FLAC essentially is an elasto-plastic model, with an
elastic stiffness of ks and yield strength S. ks values
were selected such that the resulting elasto-plastic
model gave an approximate fit of the hyperbolic-type
interface model proposed by Gomez et al. (2000a,b).
A comparison of the two models for initial loading
(i.e. construction of the wall) is shown in Figure 6.
The procedure used to determine ks values for initial loading is outlined below. The reader is referred to
Gomez et al. (2000a,b) for more details concerning
their proposed hyperbolic-type model.
0.004
(9)
The above computed ks values were used only for
the initial construction of the wall. The ks values
were changed after the construction of the wall and
prior to the application of the earthquake loading to
values consistent with the Gomez-Filz-Ebeling
Version I load/unload/reload extended hyperbolic
interface model (Gomez et al. 2000b). The procedure used to compute ks for the cyclic loading is
outlined below. Again, the reader is referred to the
cited report for more details concerning this model.
09069-39.qxd 08/11/2003 20:43 PM Page 338
(10a)
where,
with the earthquake-induced shear strains, frequently
referred to as the “reduced” vs by FLUSH users.
Assuming that the response of the retaining wall will
be dominated by shear waves, substituting Equation
12 into Equation 11a gives:
(10b)
(10c)
(13a)
or
Kurj unload-reload stiffness number for interfaces;
and Ck interface stiffness ratio.
Using the above expressions, the interface stiffnesses
were computed for the interface elements identified
in Figure 4. While the ks for unload-reload were higher
than the corresponding values for initial loading (i.e.,
Equation 10a versus Equation 9), the values for kn were
the same for both initial loading and unload-reload.
2.7
Dimensions of finite difference zones
Proper dimensioning of the finite difference zones is
required to avoid numerical distortion of propagating
ground motions, in addition to accurate computation
of model response. The FLAC manual (Itasca 2000,
Optional Features Manual) recommends that the length
of the element ( l) be smaller than one-tenth to oneeighth of the wavelength ( ) associated with the highest
frequency (fmax) component of the input motion. The
basis for this recommendation is a study by Kuhlemeyer & Lysmer (1973). Interestingly, the FLUSH
manual (Lysmer et al. 1975) recommends l be smaller
than one-fifth the associated with fmax, also referencing Kuhlemeyer & Lysmer (1973) as the basis for
the recommendation, i.e.:
(11a)
(11b)
is related to the shear wave velocity of the soil (vs)
and the frequency (f) of the propagating wave by the
following relation.
(12)
In a FLUSH analysis, it is important to note that
the vs used in this computation is not that for small
(shear) strains, such as measured in the field using
cross-hole shear wave test. Rather, in FLUSH, the vs
used to dimension the elements should be consistent
(13b)
As may be observed from these expressions, the
finite difference zone with the lowest vs, for a given
l will limit the highest frequency that can pass
through the zone without numerical distortion. For the
FLAC analyses performed in this investigation, 0.3 m
by 0.3 m zones were used in sub-grids one and two;
(refer to Figure 2). The top layer of the backfill has
the lowest vs (i.e. 160 m/sec). Using Equations 13 and
0.3 m, the finite difference grid used in the
FLAC analyses should adequately propagate shear
waves having frequencies up to approximately 53 Hz.
This value is well above the 15 Hz cutoff frequency
used in the SHAKE analysis to compute the input
motion for the FLAC analysis and well above the estimated fundamental frequency of the retaining wallsoil system being modeled (i.e. ≈6 Hz).
2.8
As stated previously, an elasto-plastic constitutive
model, in conjunction with the Mohr-Coulomb failure
criterion was used to model the soil. Inherent to this
model, once the induced dynamic shear stresses exceed
the shear strength of the soil, the plastic deformation
of the soil introduces considerable hysteretic damping.
However, for dynamic shear stresses less than the shear
strength of the soil, the soil behaves elastically (i.e. no
damping), unless additional mechanical damping is
specified. FLAC allows mass proportional, stiffness
proportional, and Rayleigh damping to be specified,
where the latter provides a relatively constant level of
damping over a restricted range of frequencies.
For the analyses performed, Rayleigh damping was
used, which required the specification of a damping
ratio and corresponding central frequency. One- to twopercent damping ratio is commonly used as a lower
bound for non-linear dynamic analyses to reduce highfrequency spurious noise (e.g. Finn 1988). However,
it was found by the authors that considerable highfrequency noise may still exist even when one- to
two-percent Rayleigh damping was specified; this is
thought to be a numerical artifact of the explicit solution algorithm used in FLAC. The damping levels in
338
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
Damping
the last iteration of the SHAKE analysis used to compute the FLAC input motion may be used as an upper
bound of the values for Rayleigh damping. Judgment
is required in selecting the damping ratio between the
lower and upper bounds; three-percent Rayleigh damping was used for most of the retaining wall analyses
performed by the authors. The central frequency corresponding to the specified damping ratio is typically
set to either the fundamental period (small strain) of
the system being modeled (an inherent property of
the wall-soil system) or predominant period of the
system response (an inherent property of the wall-soil
system and the ground motion). For the FLAC analyses
performed, the central frequency was set equal to the
small strain fundamental frequency of the retaining
wall-soil system (i.e. ≈6 Hz).
Permanent relative
displacement (m)
09069-39.qxd 08/11/2003 20:43 PM Page 339
5
10
15 20 25
Time (seconds)
Permanent relative
displacement (m)
0.7
0.6
0.5
0.4
0.3
0.2
0.1
0.0
-0.1
30
35
40
Newmark
FLAC
0
5
10
15 20 25
Time (seconds)
30
35
40
Figure 7b. Comparison of the permanent relative displacements computed from the FLAC results and a Newmark sliding block analysis with N* g 0.27 g.
Acceleration (g)
1.0
N*.g = 0.27g
0.5
N*.g = 0.22 g
0.0
0
-0.5
5
10
15
20
25
30
35
40
Time (seconds)
-1.0
Figure 8. Acceleration time-history used in the Newmark
sliding block analysis of the structural wedge.
of acceleration imparted to the block resulting in a
factor of safety against sliding equal to 1.0. Using the
interface friction angle between the concrete wall and
foundation soil (i.e. 31°) in conjunction with the
weight of the structural wedge, N* g was determined
to be approximately 0.22 g. The sliding block analysis
resulted in dr 0.55 m, as shown in Figure 7a, which
is considerably larger than that from the FLAC analysis.
One possible reason for the difference in the dr values may be that the sliding block analysis did not
account for additional sliding resistance resulting from
the “plowing action” that occurs at the toe of the wall.
339
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
FLAC
Figure 7a. Comparison of the permanent relative displacements computed from the FLAC results and a Newmark sliding block analysis with N*g 0.22 g.
3.1 Permanent wall displacement
Comparisons of the permanent relative displacements
(dr) of the wall computed from the FLAC results
and computed by Newmark sliding block analyses
(Newmark 1965) of the structural wedge (Fig. 1) are
shown in Figure 7a,b. dr was not computed directly by
FLAC, but rather was computed by subtracting the total
displacement of the structural node at the intersection
of the stem and base of the wall from the total displacement of the grid point at the free-field boundary
at the same depth. As may be observed from Figure 7,
dr computed from the FLAC results is about 0.33 m.
Newmark sliding block analyses of the structural
wedge (Fig. 1) were performed using the acceleration
time-history shown in Figure 8. This time-history was
computed by FLAC at the free-field boundary at a
depth corresponding to approximately mid-height of
the structural wedge. In order to perform a Newmark
sliding block analysis, a maximum transmissible acceleration (N* g) has to be specified, which is the value
Newmark
0
3 DISCUSSION
Several analyses were performed using the model of
the wall-soil system described above, scaling the input
motion to different peak ground acceleration values.
To assess the adequacy of the model, the results from
the FLAC analyses were compared with the results from
simplified techniques for estimating the permanent
wall displacement and the dynamic earth pressures.
The purpose of the comparisons was only to provide a
reality check of the FLAC results, while true validation
of the FLAC model would require a comparison with
actual field observations. Comparisons of the results
are discussed in the following sub-sections. However,
the reader is referred to Ebeling & Morrison (1992)
and Green and Ebeling (2002) for more detailed discussions about the simplified techniques used.
0.7
0.6
0.5
0.4
0.3
0.2
0.1
0.0
-0.1
09069-39.qxd 08/11/2003 20:43 PM Page 340
3.2
Dynamic earth pressures
The dynamically induced lateral earth pressures acting on the stem of the wall were computed by FLAC.
The corresponding lateral earth pressure coefficients
(KFLAC) were computed from these stresses using the
following expression (Green et al. 2003):
4.0
3.5
Lateral earth pressure
coefficient (K)
Although the wall is not embedded in the foundation
soil in its initial, undeformed shape, the wall tends to
rotate around the toe as it translates away from the
backfill. As a result, the toe of the wall penetrates and
plows through the foundation soil. Such a mechanism
was observed in the deformed FLAC mesh. To account
for this additional resistance to sliding, N* g was
recomputed assuming a friction angle of 35°, which is
between the interface friction angle (i.e. 31°) and
the of the foundation soil (i.e. 40°), with the revised
value of N* g 0.27 g. A comparison of the permanent relative displacements computed from FLAC and
the sliding block analyses using the revised value of
N* g is shown in Figure 7b. As may be observed from
this figure, the predicted displacements are in very
close agreement, thus giving credence to the validity
of the proposed FLAC model.
2.5
2.0
1.5
1.0
0.0
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0
kh
Figure 9. Comparison of FLAC and Mononobe-Okabe
dynamic lateral earth pressure coefficients.
1.0
N* = 0.27
0.5
kh 0.0
0
(14)
5
10
15
20
Time (seconds)
25
30
35
40
-1.0
Figure 10.
kh at middle of structural wedge.
The second item of particular note in Figure 9 is
that FLAC predicts kh values as high as 0.5, while the
upper bound value should be the maximum transmissible acceleration used in the sliding block analyses
(i.e. N* 0.27). A plot of the kh time-history computed by FLAC at the approximate center of gravity of
the structural wedge is shown in Figure 10. It can be
observed from this figure that the kh values greater
than 0.27 are associated with high-frequency motions
(that contain little energy).
There are two possible reasons for kh N*. First,
this could simply be a numerical artifact of the
explicit algorithm used in FLAC, rather than a physical phenomenon. However, the criterion that kh N*
is based on the premise that the structural wedge is
perfectly rigid. For a flexible structural wedge, such
as the one modeled, higher modes of vibration could
be excited in the structural wedge. This could result in
high local kh values, while the global kh value for the
structural wedge (i.e. that which contributes to base
shear) is less than N*. Adding credence to the latter
explanation is that Wartman et al. (2003) observed
kh N* values in physical model tests of deformable
blocks on an inclined plane. Additional analyses are
underway to determine exactly the cause of the high
kh values.
340
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
KAE
0.5
-0.5
where PFLAC the resultant of the FLAC computed
stresses acting on the stem of the wall; t the total
unit weight of the backfill; H the height of the
wall; and kv vertical inertial coefficient (assumed
to be zero). Equation 14 was used to compute KFLAC
values at times corresponding to the peaks in the
time-history of the horizontal inertial coefficient (kh)
acting away from the backfill (i.e. active-type conditions). A plot of the computed KFLAC values versus kh
is shown in Figure 9. Also shown in this figure are the
lateral dynamic earth pressure coefficients (active:
KAE; Passive: KPE) computed using the MononobeOkabe expressions for the wall-soil system (Okabe
1924; Mononobe & Matsuo 1929). The reader is
referred to Green et al. (2003) and Ebeling & Morrison
(1992) for details regarding the Mononobe-Okabe
dynamic earth pressure coefficients.
Two items are of particular note in Figure 9. First,
in general, the KFLAC values are higher than the KAE
for values of kh less than about 0.4. This phenomenon
is discussed in detail in Green et al. (2003) and is due
to the failure wedge in the backfill being composed of
several failure wedges rather than a single rigid wedge,
as assumed in the Mononobe-Okabe expressions. In
short, the difference in the KFLAC and KAE values is
attributed to a shortcoming in the Mononobe-Okabe
expressions, rather than a shortcoming in the FLAC
model.
KPE
3.0
09069-39.qxd 08/11/2003 20:43 PM Page 341
4 SUMMARY AND CONCLUSIONS
The authors outline the details of a numerical model
and its calibration for use in computing the dynamic
response of a cantilever retaining wall. The proposed
model employs an elasto-plastic constitutive model
for the soil in conjunction with the Mohr-Coulomb
failure criterion. The wall is modeled with elastic beam
elements using a cracked second moment of area
(Icracked) equal to 0.4 Iuncracked. Interface elements
are used to model the wall-soil interface, wherein the
interface element parameters are those that give a best
fit of the Gomez et al. (2000a,b) hyperbolic interface
model. Based on comparisons with simplified techniques for dynamic lateral earth pressure and permanent relative displacement, the proposed wall model
is believed to yield valid results.
ACKNOWLEDGEMENTS
A portion of this study was funded by the Headquarters,
US Army Corps of Engineers (HQUSACE) Civil Works
Earthquake Engineering Research Program (EQEN).
Permission was granted by the Chief of the US Army
Corps of Engineers to publish this information.
During the course of this research investigation,
the authors had numerous discussions with other FLAC
users. Of particular note were lengthy conversations
with Mr. C. Guney Olgun, Virginia Polytechnic and
State University, Blacksburg, VA. Others who provided valuable insight into FLAC modeling were
Mr. Nason McCullough and Dr. Stephen Dickenson,
Oregon State University, Cornvallis, OR; Drs. N. Deng
and Farhang Ostadan, Bechtel Corporation, San
Francisco, CA; Mr. Michael R. Lewis, Bechtel
Savannah River, Inc., Aiken, SC; Drs. Peter Byrne
and Michael Beaty, University of British Columbia,
Vancouver; and Dr. Marte Gutierrez, Virginia Polytechnic and State Uni-versity, Blacksburg, VA.
Review comments by Dr. William F. Marcuson, III,
Emeritus Director, Geotechnical Laboratory, US Army
Engineers Waterways Experiment Station, were also
greatly appreciated.
REFERENCES
Ebeling, R.M. & Morrison, E.E. 1992. The Seismic Design
of Waterfront Retain Structures. US Army Technical
Report ITL-92-11, US Navy Technical Report NCEL
TR-939, US Army Engineer Waterways Experiment
Station, Vicksburg, MS. (http://itl.erdc.usace.army.mil/
pdf/itl9211.pdf).
Finn, W.D.L. 1988. Dynamic Analyses in Geotechnical
Engineering. In J.L. Von Thun (ed), Earthquake Engineering and Soil Dynamics II – Recent Advances in
Ground-Motion Evaluation, Geotechnical Special Publication 20, ASCE, 523–591.
Gomez, J.E., Filz, G.M., & Ebeling, R.M. 2000a. Development
of an Improved Numerical Model for Concrete-to-Soil
Interfaces in Soil-Structure Interaction Analyses, Report
2, Final Study. ERDC/ITL TR-99-1, US Army Corps of
Engineers, Engineer Research and Development Center.
(http://libweb.wes.army.mil/uhtbin/hyperion/ITL-TR-991.pdf).
Gomez, J.E., Filz, G.M., & Ebeling, R.M. 2000b. Extended
Load/Unload/Reload Hyperbolic Model for Interfaces:
Parameter Values and Model Performance for the Contact
Between Concrete and Coarse Sand. ERDC/ITL TR-007, US Army Corps of Engineers, Engineer Research and
Development Center. (http://libweb.wes.army.mil/uhtbin/
hyperion/ITL-TR-00-7.pdf).
Green, R.A., Olgun, C.G., Ebeling, R.M., & Cameron, W.I.
2003. Seismically Induced Lateral Earth Pressures on a
Cantilever Retaining Wall. Proceedings: The Sixth US
Conference and Workshop on Lifeline Earthquake Engineering (TCLEE2003), ASCE, August 10–13, 2003,
Long Beach, CA.
Green, R.A. & Ebeling, R.M. 2002. Seismic Analysis of
Cantilever Retaining Walls, Phase 1. ERDC/ITL TR-023, US Army Corps of Engineers, Engineer Research and
Development Center. (http://libweb.wes.army.mil/uhtbin/
hyperion/ITL-TR-02-3.pdf).
Headquarters, US Army Corps of Engineers. 1989. Retaining
and Flood Walls. EM 1110-2-2502, Washington, DC.
(http://www.usace.army.mil/inet/usace-docs/engmanuals/em1110-2-2502/toc.htm)
Headquarters, US Army Corps of Engineers. 1992. Strength
Design for Reinforced-Concrete Hydraulic Structures.
EM 1110-2-2104, Washington, DC. (http://www.usace.
army.mil/inet/usace-docs/eng-manuals/em1110-22104/toc.htm).
Idriss, I.M. & Sun, J.I. 1992. User’s Manual for SHAKE91:
A Computer Program for Conducting Equivalent Linear
Seismic Response Analyses of Horizontally Layered Soil
Deposits. Center for Geotechnical Modeling, Department
of Civil and Environmental Engineering, University of
California, Davis, CA.
Itasca. 2000. FLAC (Fast Largrangian Analysis of Continua)
User’s Manuals. Minneapolis: Itasca Consulting Group,
Inc.
Jaky, J. 1944. The Coefficient of Earth Pressure at Rest.
Magyar Menok es Epitesz Kozloi (Journal of the Society
of Hungarian Architects and Engineers).
Kuhlemeyer, R.L. & Lysmer, J. 1973. Finite Element Method
Accuracy for Wave Propagation Problems. Journal of the
Soil Mechanics and Foundations Division 99(SM5):
421–427.
Lysmer, J., Udaka, T., Tsai, C.-F., & Seed, H.B. 1975.
FLUSH: A Computer Program for Approximate 3-D
Analysis of Soil-Structure Interaction Problems. EERC
Report No. EERC-75-30, Earthquake Engineering
Research Center, University of California, Berkeley,
CA.
MacGregor, J.G. 1992. Reinforced Concrete Mechanics and
Design. Englewood Cliffs: Prentice Hall.
Mononobe, N. & Matsuo, H. 1929. On the Determination of
Earth Pressures During Earthquakes. Proceedings: World
Engineering Congress 9: 177–185.
341
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands
09069-39.qxd 08/11/2003 20:43 PM Page 342
Newmark, N.M. 1965. Effects of Earthquakes on Dams and
Embankments. Geotechnique 15(2): 139–160.
Okabe, S. 1924. General Theory of Earth Pressures. Journal
Japan Society of Civil Engineering 10(6): 1277–1323,
plus figures.
Paulay, T. & Priestley, M.J.N. 1992. Seismic Design of
Reinforced Concrete and Masonry Buildings. New York:
John Wiley and Sons, Inc.
Terzaghi, K. 1943. Theoretical Soil Mechanics. New York:
John Wiley and Sons, Inc.
Wartman, J., Bray, J.D., & Seed, R.B. 2003. Inclined Plane
Studies of the Newmark Sliding Block Procedure.
Journal of Geotechnical and Geoenvironmental Engineering 129(8): in press.
342
Copyright © 2003 Swets & Zeitlinger B.V., Lisse, The Netherlands