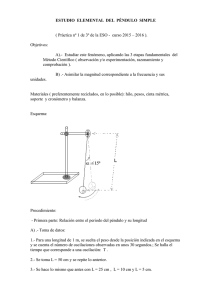
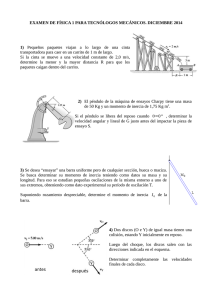
3. CONTEXTUALIZACIÓN. 3.1 Péndulo Físico o compuesto 3.1.1 Definiciones Según Molina, F (2020) el péndulo simple constituye el sistema en el cual un cuerpo rígido gira libremente alrededor de un eje horizontal que no pasa por el centro de masa y oscila cuando se desplaza de su posición de equilibro. Según Serway R. y Jewett J. Jr. (2008), si un objeto que cuelga oscila en torno a un eje fijo que no pasa a través de su centro de masa y el objeto no se puede aproximar como una masa puntual, no se puede tratar al sistema como un péndulo simple. En este caso, el sistema se llama péndulo físico. Según Sears y Zemansky M (2013), un péndulo físico es cualquier péndulo real que usa un cuerpo de tamaño finito, en contraste con el modelo idealizado de péndulo simple en el que toda la masa se concentra en un punto. Si las oscilaciones son pequeñas, el análisis del movimiento de un péndulo real es tan sencillo como el de uno simple. Figura 1. Dinámica de un péndulo físico. Tomada de: Sears y Zemansky M (2013) La Ilustración 1 muestra un cuerpo de forma irregular que puede girar sin fricción alrededor de un eje que pasa por el punto O. En la posición de equilibrio, el centro de gravedad está directamente abajo del pivote; en la posición que se muestra en la figura, el cuerpo está desplazado del equilibrio un ángulo u que usamos como coordenada para el sistema. La distancia de O al centro de gravedad es d, el momento de inercia del cuerpo alrededor del eje de rotación a través de O es I y la masa total es m. Cuando el cuerpo se desplaza como se muestra, el peso mg causa una torca de restitución. (Sears y Zemansky M .2013) 3.2 Características Las características principales del péndulo físico o compuesto son: El péndulo físico es un sistema con un solo grado de libertad; el correspondiente a la rotación alrededor del eje fijo. La posición del péndulo físico queda determinada, en cualquier instante, por el ángulo que forma el plano determinado por el eje de rotación y el centro de gravedad del péndulo con el plano vertical que pasa por el eje de rotación. En este caso el objeto que oscila no puede aproximarse a una partícula puntual como en el caso de un péndulo simple. El objeto pivota alrededor del punto O debido al momento de fuerzas respecto al punto O que ejerce la fuerza peso (𝑚 × 𝑔) aplicada sobre el centro de masas del cuerpo (CM). El punto de intersección del eje con el plano es el punto de suspensión. 3.3 Ecuaciones Como se observa en la figura (2) plana con un eje de rotación situado a una distancia 𝑑 del centro de masa y desplazada de su posición de equilibrio un ángulo 𝜙. Figura 2. Tomada de: Molina, F (2020) El momento de torsión (𝜁) respecto al eje tiene como módulo 𝑚. 𝑔. 𝐷. 𝑠𝑒𝑛𝜙 y tiende a disminuir 𝜙. Al aplicar la segunda ley de Newton a la rotación se tiene: 𝜁 = 𝐼. 𝛼 de donde: 𝛼 es la aceleración angular. 𝐼 es la inercia rotacional respecto al eje. Se sabe que: 𝜁 = −𝑚. 𝑔. 𝑑. 𝑠𝑒𝑛𝜙 y que la aceleración angular del péndulo físico estaría dada por el diferencial: 𝑑2 ∅ 𝛼 = 𝑑 𝑡2 Al sustituir las dos ecuaciones en la de 𝜁, se tiene: −𝑚. 𝑔. 𝐷. 𝑠𝑒𝑛𝜙 = 𝐼. 𝑑2∅ 𝑑 𝑡2 Despejando el diferencial queda: 𝑑2∅ 𝑚. 𝑔. 𝑑 =− 𝑠𝑒𝑛𝜙 2 𝑑𝑡 𝐼 Cuando la oscilación es pequeña y los valores de 𝜙 son menores a 10° el error cometido en los cálculos corresponde a menos del 1 %, el valor del 𝑠𝑒𝑛𝜙 = 𝜙, entonces la ecuación queda: − 𝑚. 𝑔. 𝑑 𝑚. 𝑔. 𝑑 𝑠𝑒𝑛𝜙 = − 𝜙 𝐼 𝐼 − 𝑚. 𝑔. 𝑑 𝑠𝑒𝑛𝜙 = −𝜔2 ∅ 𝐼 La velocidad angular queda expresada por: 𝜔2 = 𝑚. 𝑔. 𝑑 𝐼 𝑚. 𝑔. 𝑑 𝐼 √𝜔2 = √ 𝑚. 𝑔. 𝑑 𝐼 𝜔=√ También se sabe que: 2𝜋 𝐼 𝜔 = Al despejar el periodo T nos queda: 𝑇 = 𝑇 = 2𝜋 𝜔 2𝜋 √𝑚. 𝑔. 𝑑 𝐼 𝐼 𝑚. 𝑔. 𝑑 𝑇 = 2𝜋√ Molina, F (2020) 3.4 Momento de inercia Un sólido rígido cualquiera, suspendido verticalmente de un eje horizontal alrededor del cual puede oscilar por la acción de la gravedad, constituye un péndulo físico o péndulo compuesto. Si se desplaza de su posición de equilibrio un pequeño ángulo y se le suelta, el péndulo oscila con movimiento armónico simple de período: 𝑇 = 2𝜋√ 𝐼𝐴 𝑚. 𝑔. 𝑑 (1) donde: 𝑚 es la masa del cuerpo. 𝐼 el momento de inercia respecto al eje de oscilación que pasa por A. 𝑑 es la distancia desde el eje de oscilación al centro de gravedad. Haciendo uso del teorema de Steiner podemos expresar el momento de inercia anterior como: 𝐼𝐴 = 𝐼𝐺 + 𝑚𝑑 2 (2) donde: 𝐼𝐺 es el momento de inercia respecto de un eje, paralelo al anterior, que pasa por su centro de gravedad G. Este momento de inercia siempre es proporcional a la masa a través de la expresión: 𝐼𝐺 = 𝑚𝑘 2 (3) donde a: k se le denomina radio de giro. Sustituyendo la expresión (3) en (2), tendremos: 𝐼𝐴 = 𝐼𝐺 + 𝑚𝑑 2 𝐼𝐴 = 𝑚𝑘 2 + 𝑚𝑑 2 Sustituyendo esta ecuación en la expresión (1) del período obtenemos: 𝐼𝐴 𝑚. 𝑔. 𝑑 𝑇 = 2𝜋√ 𝑚𝑘2 + 𝑚𝑑2 𝑇 = 2𝜋√ 𝑚. 𝑔. 𝑑 𝑚(𝑘2 + 𝑑2 ) 𝑚. 𝑔. 𝑑 𝑇 = 2𝜋√ 𝑘2 + 𝑑2 𝑔. 𝑑 𝑇 = 2𝜋√ Escribiendo de forma conveniente esta ecuación llegamos a: 𝑑𝑇 2 = 4𝜋 2 2 4𝜋 2 2 𝑑 + 𝑘 𝑔 𝑔 Por tanto, si representamos en un sistema de ejes cartesianos los valores 𝑑𝑇 2 en ordenadas y los de 𝑑2 en abscisas, obtendremos una recta cuya pendiente nos permite hallar el valor de 𝑔 y la ordenada en el origen el valor 𝑘 del radio de giro del cuerpo. Molina, F (2020) Ejercicio 1 Todos los animales que caminan, incluido el ser humano, tienen un ritmo (paso) natural para caminar, un paso para caminar, un número de pasos por minuto, que es más cómodo que ritmo más rápido o más lento. Suponga que este ritmo natural corresponde a la oscilación de las pernas como un péndulo físico. a) Pruebas fósiles demuestra que el Tyrannosaurus rex, un dinosaurio bípedo que vivió hace 65 millones de años al final del Cretácico, tenía una longitud de pierna L=3.1 m y una longitud de paso (la distancia de una huella a la siguiente del mismo pie; figura 13.24) S = 4.0 m. Estime la rapidez con que camina el T rex. Comprender el problema Datos L = 3.1 m S = 4.0 m Incógnita V= ¿? Desarrollo y aplicación del plan Trataremos la pierna como un péndulo físico, con el periodo de oscilación que determinamos en el ejemplo 13.9. Cuando más corto sea el periodo, el ritmo al caminar será más rápido. Podemos obtener la rapidez al caminar a partir del periodo y la longitud de la zancada. 2𝐿 𝑇 = 2𝜋√3𝑔 2(3.1 𝑚) 𝑇 = 2𝜋√3(9.8 𝑚/𝑠2 ) 𝑇 = 2.9 𝑠 La distancia que se mueve en este tiempo es la longitud de zancada S. así que la rapidez al andar es 𝑆 𝑣=𝑇 𝑣= 4.0 𝑚 2.9 𝑠 𝑣 = 1.4 𝑚 𝑠 ≈ 5.0 𝑘𝑚 ℎ Conclusión La velocidad de con la que camina el Tyrannosaurus rex es de 5.0 𝑘𝑚 ℎ Examinar la solución obtenida El péndulo ayuda a determinar experimentalmente el periodo y la velocidad de un objeto, ecuación utilizada fue deducida tomando en cuenta el momento de inercia del Tyrannosaurus rex. Young, Hugh y Roger A. Freedman. (2099). Física Universitaria volumen 1. Decimosegunda edición. Ed Pearson Educación, México. ISBN: 978-607-442-288-7 Ejemplo 2: Una barra uniforme de 1 metro de longitud se articula en torno a un extremo y oscila en un plano vertical. Calcule el periodo de su movimiento. Sears y Zemansky, M. (2013). Física Universitaria. (pp. 456) i. Comprender el problema: Datos: Grafico: 𝐿 =1𝑚 𝑔 = 9,80 𝑚/𝑠 2 Tomada de: Sears y Zemansky M (2013) Incógnitas: 𝑇 =? Concebir un plan Al observar nuestros datos, nuestra incógnita es el periodo de oscilación necesitamos encontrar el momento de inercia de la varilla en la tabla y después determinar T. La fórmula que utilizaremos será la siguiente: 𝐼 𝑚. 𝑔. 𝑑 𝑇 = 2𝜋√ El momento de inercia de una varilla uniforme con respecto a un eje en su extremo es 𝐼 = 1 𝐿 𝑀𝐿2 . La distancia del pivote al centro de gravedad de la varilla es 𝑑 = 2 , remplazamos en 3 la formula los valores de 𝐼 y 𝑑 y obtenemos: 1 𝑀𝐿2 3 𝑇 = 2𝜋√ 𝐿 𝑚. 𝑔. 2 2𝐿 3𝑔 𝑇 = 2𝜋√ Ejecutar el plan Para calcular el periodo sustituimos con nuestros datos en la fórmula despejada: 2𝐿 3𝑔 𝑇 = 2𝜋√ 𝑇 = 2𝜋√ 2(1 𝑚) 𝑚 3(9,80 2 ) 𝑠 𝑇 = 2𝜋√ 2𝑚 𝑚 29,4 2 𝑠 10 𝑠2 147 𝑇 = 2𝜋√ 𝑇 = 2𝜋 √30𝑠2 21 𝑇 = 1,64𝑠 2 ii. Desarrollo y aplicación Aplicando las ecuaciones del péndulo físico con los datos del ejercicio podemos determinar el valor del periodo de la barra uniforme de un metro de longitud, además, el periodo es 2 menor en un factor de √3 que el de un péndulo simple con la misma longitud; ya que el momento de inercia de la varilla alrededor de un extremo, es un tercio del que tiene un péndulo simple, y el centro de gravedad de la varilla está a la mitad de la distancia a partir del pivote, en comparación con un péndulo simple. iii. Conclusión Una vez ya realizado los procedimientos requeridos se obtuvo que el periodo de movimiento de la barra uniforme es de 1,64𝑠 2 . Young, Hugh y Roger A. Freedman. (2099). Física Universitaria volumen 1. Decimosegunda edición. Ed Pearson Educación, México. ISBN: 978-607-442-288-7 Organizador gráfico Referencias: Molina, F. (2020). Ondas: Péndulo físico. Documento Base. Quito-Ecuador Sears y Zemansky, M. (2013). Física Universitaria. (13ª ed.). (Vol. 1), Editorial Pearson. México Serway R. y Jewett J. Jr. (2008). Física para ciencias e ingeniería (7ª ed.). (Vol. 1), México, D.F: Cengage Learning Editores, S. A de C.V