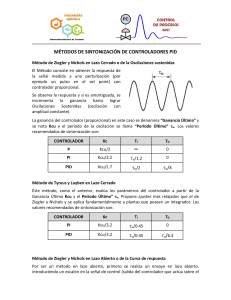
Fase 5 - Socializar resultados finales Sintonización de PID Luis Andres Ramos Codigo:94391765 Grupo :203041_22 Tutor: Ing. Fabián Bolívar Marín Control Digital Diciembre de 2021 Sintonizar: En un sistema retroalimentado significa, regular parámetros en el controlador para lograr implementar un control robusto en el sistema “Robusto” se denomina como la estabilidad. De las variables del proceso a pesar de los cambios de carga, una rápida respuesta de entre los cambios de setpoint, oscilaciones mínimas, y un offset mínimo, así, la sintonía de un PID sería el ajuste de sus parámetros (kp),(Ti),Y (Td) para lograr el comportamiento aceptable y robusto de conformidad con algún criterio de desempeño, basado en la entrada en escalón (Tomado de: https://es.slideshare.net/quasar.0360.7912/sintonizacion-de-controladores-pid?next_slideshow=1). Existen procesos que su comportamiento no es autorregulado, sino que presentan un comportamiento en forma de rampa o exponencial estos procesos son denominados procesos integrantes entre estos tenemos los procesos de calderas de calentamiento, estos procesos presentan un método teórico para identificación dinámica del proceso en nuestro caso tendremos los parámetros de caracterización del sistema aplicando métodos como el de Ziegler Nichols. Método de diseño practico el cual consiste en un sistema de (calentador) implementado en un microcontrolador digital (PIC 16F 877A), dicho método permite aproximar los parámetros del controlador (PID) para un sistema cuya respuesta al escalón responde a la entrada de perturbaciones. FI-GQ-GCMU-004-015 V. 001-17-04-2013 Identificación del escenario Montaje en Proteus Identificación del escenario Gráfica de reacción De la recta de máxima pendiente se deducen lo parámetros necesarios para hallar (𝜏0 , 𝛾0 , 𝑘0 ) por el método de laso abierto modelado el sistema queda así. Identificación del escenario Recta tangente en gráfica 𝑡0 = 1,5𝑠 𝑡1 = 2,5𝑠 𝑡2 = 17,6𝑠 Identificación del escenario Modelo analítico Los otros parámetros (kp),(Ti) y (Td), calculados según la regla de sintonización basada en la respuesta al escalón de Ziegler Nichols. Reemplazando los valores obtenidos de (kp),(Ti) y (Td), en las ecuaciones anteriores teniendo en cuenta un periodo de muestreo de (T=0,1) respetando siempre el criterio que : Reemplazamos los valores obtenidos en nuestro análisis. 𝜏0 = 2,5 − 1,5 = 1 𝜏0 = 1 𝛾0 = 17.6 − 2,5 = 15,1 𝛾0 = 7,4 162−30 132 𝑘0 = = = 52.8 2.5−0 2.5 𝑘0 = 52.8 Según Ziegler-Nichols, la relación de estos coeficientes con los parámetros del controlador son: 𝛾 15,1 𝑘𝑝 = 1,2 0 = 1,2 = 0,3432 𝑘0 𝜏0 (52.8)(1) 𝑘𝑝 = 0,3432 𝑇𝑖 = 2𝜏0 = 2 1 = 2 𝑇𝑖 = 2 𝑇𝑑 = 0,5𝜏0 = 0,5 1 = 0,5 𝑇𝑑 = 0,5 Seguido discretizamos los valores encontrados puesto que en este momento el sistema se encuentra en tiempo continuo así. 𝑈(𝑧) 𝐸(𝑧) 𝑏 = 𝑎 + 1−𝑧 −1 + 𝐶(1 − 𝑧 −1 ) 𝑎 = 𝑘𝑝 , 𝑏= 𝑘𝑝 𝑇 𝑇𝑖 , 𝐶= 𝑘𝑝 𝑇𝑑 𝑇 FI-GQ-GCMU-004-015 V. 001-17-04-2013 Reemplazamos los valores obtenidos Tomamos como 𝑇 = 0,1 𝑎 = 0,3432 0,3432(0,1) 𝑏= = 0,0172 𝐶= 2 0,3432(0,5) 0,1 = 1.716 Obtenidos los valores de (a,b,y c) seguido nos dirigimos al programa (PIC c compiler) para reemplazar valores . Se requiere de un conversor Análogo/Digital para ingresar el voltaje entregado. por el sensor T del modelo OVEN. Dado que dicho terminal entrega 1V/°C, se útil iza un divisor de voltaje para adecuar la señal del sensor a niveles permitidos por el conversor A/D; en este caso se utiliza un divisor de voltaje con factor 100, es decir, que para una temperatura de 100°C (100V) el conversor recibirá 1V. El control se realiza mediante una señal PWM proporcional a la señal generada por el controlador. Por tanto, el uso del microcontrolador PIC16F877A, es pertinente para Lo que necesitamos implementar. Como resultado observamos la gráfica de salida del sistema bajo los criterios planteados inicialmente, con dos perturbaciones incluidas dentro del sistema la primera de 0 a 50s y la segunda de 0 a 120s logrando la estabilización del sistema en 160°C comprobando la efectividad del método de Ziegler Nichols. FI-GQ-GCMU-004-015 V. 001-17-04-2013 FI-GQ-GCMU-004-015 V. 001-17-04-2013 Como observamos el sistema obtiene una estabilidad en el punto de ajuste 160°C FI-GQ-GCMU-004-015 V. 001-17-04-2013 Link del video : https://youtu.be/nacT4TPJHi8 FI-GQ-GCMU-004-015 V. 001-17-04-2013