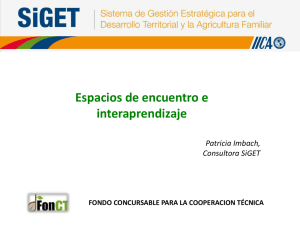
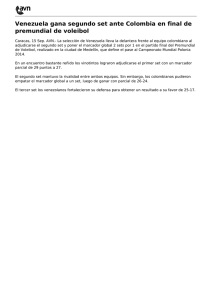
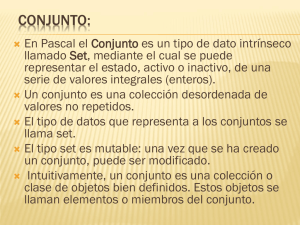
Las Series del Instituto de Ingeniería describen los resultados de algunas de las investigaciones más relevantes de esta institución. Con frecuencia son trabajos in extenso de artículos que se publican en revistas especializadas, memorias de congresos, etc. Cada número de estas Series se edita con la aprobación técnica del Comité Editorial del Instituto, basada en la evaluación de árbitros competentes en el tema, adscritos a instituciones del país y/o el extranjero. Actualmente hay tres diferentes Series del Instituto de Ingeniería: Incluye trabajos originales sobre investigación y/o desarrollo tecnológico. Es continuación de la Serie Azul u Ordinaria, publicada por el Instituto de Ingeniería desde 1956, la cual actualmente tiene nueva presentación y admite textos en español e inglés. SERIE DOCENCIA Está dedicada a temas especializados de cursos universitarios para facilitar a estudiantes y profesores una mejor comprensión de ciertos temas importantes de los programas de estudio. SERIE MANUALES Abarca manuales útiles para resolver problemas asociados con la práctica profesional o textos que describen y explican el estado del arte o el estado de la práctica en ciertos temas. Incluye normas, manuales de diseño y de laboratorio, reglamentos, comentarios a normas y bases de datos. Introducción al análisis estructural con OpenSees SERIE INVESTIGACIÓN Y DESARROLLO Introducción al análisis estructural con OpenSees ISBN: 978-607-30-3085-4 Las Series del Instituto de Ingeniería pueden consultarse gratuitamente desde la dirección electrónica del Instituto http://www.ii.unam.mx (http://aplicaciones.iingen.unam.mx/ConsultasSPII/Buscarpublicacion.aspx) y pueden grabarse o imprimirse en formato PDF desde cualquier computadora. Luis Ivan Velasco Enriquez SD 61 / 2020 Héctor Guerrero Bobadilla Serie Docencia Publicación arbitrada SD 61 ABRIL, 2020 Serie DOCENCIA Publicación arbitrada Las Series del Instituto de Ingeniería describen los resultados de algunas de las investigaciones más relevantes de esta institución. Con frecuencia son trabajos in extenso de artículos que se publican en revistas especializadas, memorias de congresos, etc. Actualmente hay tres diferentes Series del Instituto de Ingeniería: SERIE INVESTIGACIÓN Y DESARROLLO Incluye trabajos originales sobre investigación y/o desarrollo tecnológico. Es continuación de la Serie Azul u Ordinaria, publicada por el Instituto de Ingeniería desde 1956, la cual actualmente tiene nueva presentación y admite textos en español e inglés. SERIE DOCENCIA Está dedicada a temas especializados de cursos universitarios para facilitar a estudiantes y profesores una mejor comprensión de ciertos temas importantes de los programas de estudio. SERIE MANUALES Abarca manuales útiles para resolver problemas asociados con la práctica profesional o textos que describen y explican el estado del arte o el estado de la práctica en ciertos temas. Incluye normas, manuales de diseño y de laboratorio, reglamentos, comentarios a normas y bases de datos. Introducción al análisis estructural con OpenSees Cada número de estas Series se edita con la aprobación técnica del Comité Editorial del Instituto, basada en la evaluación de árbitros competentes en el tema, adscritos a instituciones del país y/o el extranjero. Las Series del Instituto de Ingeniería pueden consultarse gratuitamente desde la dirección electrónica del Instituto (II UNAM), http://www.ii.unam. mx (http://aplicaciones.iingen.unam.mx/ConsultasSPII/Buscarpublicacion. aspx) y pueden grabarse o imprimirse en formato PDF desde cualquier computadora. INTRODUCCIÓN AL ANÁLISIS ESTRUCTURAL CON OPENSEES ISBN: 978-607-30-3085-4 SD 61 / 2020 LUIS IVAN VELASCO ENRIQUEZ HÉCTOR GUERRERO BOBADILLA SD-61 ABRIL, 2020 Publicación arbitrada ISBN 978-607-30-3085-4 INTRODUCCIÓN AL ANÁLISIS ESTRUCTURAL CON OPENSEES Luis Ivan Velasco Enriquez1 IIUNAM [email protected] Héctor Guerrero Bobadilla2 IIUNAM [email protected] Serie Docencia 61 Abril 2020 1 2 Estudiante Investigador Asociado Introducción al análisis estructural con OpenSees Primera edición, Abril de 2020 Serie Docencia 61 D.R.© 2020 Universidad Nacional Autónoma de México Instituto de Ingeniería, UNAM Ciudad Universitaria, CP 04510, Ciudad de México ISBN 978-607-30-3085-4 La obra fue editada por el Instituto de Ingeniería, de la Universidad Autónoma de México (IIUNAM). El cuidado de la edición estuvo a cargo de la Unidad de Promoción y Comunicación del IIUNAM. Esta obra está gratuitamente disponible para consulta e impresión, en archivo PDF de 2.4 MB, en la sección de Publicaciones del portal electrónico del IIUNAM, http://www.iingen.unam.mx, desde que se terminó de editar. iii Dedicatoria A Aldo, Diana y Kalef Luis Ivan Velasco Enriquez A mi familia y amigos Héctor Guerrero Bobadilla v Prefacio El objetivo principal de este libro es brindar a estudiantes, académicos y profesionales de la Ingeniería Estructural una explicación amigable y clara sobre el programa OpenSees (2018). A lo largo del libro, el lector encontrará diferentes ejemplos de estructuras analizadas con OpenSees. Cada ejemplo cuenta con una descripción de la estructura, del código que construye al modelo y de los comandos que se emplean en el ejemplo. De manera adicional, se anexan los códigos de cada modelo, de tal manera que el lector podrá realizar los ejemplos en su propia computadora. Al finalizar la lectura de este documento, el lector conocerá los comandos fundamentales para evaluar expresiones matemáticas, establecer variables y definir estructuras condicionales básicas en el lenguaje de programación TCL, esencial para el manejo de OpenSees. También, estará familiarizado con la metodología y los comandos necesarios para crear y analizar modelos estructurales bajo cargas estáticas y dinámicas en OpenSees y podrá analizar de manera no lineal estructuras metálicas y de concreto. Ciudad Universitaria, Cd Mx Febrero 2020 Luis Ivan Velasco Enriquez y Héctor Guerrero Bobadilla vi Agradecimientos Los autores gradecen el apoyo del Instituto de Ingeniería de la Universidad Nacional Autónoma de México por brindar la infraestructura necesaria; sin ella no hubiera sido posible publicar este libro. vii Resumen Este libro presenta una introducción al análisis estructural usando el programa Opensees. Este programa ha cobrado mucha popularidad en la comunidad internacional por su eficiencia para realizar simulaciones sísmicas. El documento inicia con una introducción al lenguaje TCL, que es el lenguaje usado por el programa Opensees. Después se realizan algunos ejemplos de estructuras sujetas a cargas estáticas y dinámicas. Se incluyen también ejemplos con comportamiento elástico e inelástico. Por último, el libro explica cómo modelar estructuras equipadas con disipadores de energía sísmica. Palabras clave: OpenSees, análisis estructural, comportamiento inelástico, simulaciones sísmicas, modelado de disipadores viii Abstract This book presents an introduction to structural analysis using OpenSees. This program has taken great popularity in international community due to its efficiency for carrying out seismic simulations. The document starts explaining simple commands in TCL language, which is the programing language used by OpenSees. Afterwards, some examples of structures are analyzed under static and dynamic loads. Examples that consider elastic and inelastic behavior are included as well. Finally, the book explains modelling of structures equipped with seismic energy dissipaters. Keywords: OpenSees, structural analysis, inelastic behavior, seismic simulations, modeling of dissipaters ix Índice 1. Introducción .............................................................................................................. 1 2. OpenSees y lenguaje TCL......................................................................................... 3 3. 4. 5. 2.1 Orígenes de OpenSees ......................................................................................... 3 2.2 Ambiente de OpenSees ........................................................................................ 4 2.3 Interfaz de OpenSees ........................................................................................... 4 2.4 Descarga de OpenSees ......................................................................................... 5 2.5 Conocimientos básicos del lenguaje Tcl ............................................................... 6 2.6 Procedimientos .................................................................................................. 10 2.7 Introducción de comandos en OpenSees............................................................. 10 2.8 Visualización del modelo 1.08 ........................................................................... 11 2.9 Ayudas disponibles en línea ............................................................................... 12 2.10 Organización del documento .............................................................................. 13 Modelado y análisis estático de una armadura ...................................................... 15 3.1 Descripción del modelo ..................................................................................... 15 3.2 Descripción del código....................................................................................... 16 3.3 Comandos adicionales empleados ...................................................................... 19 Determinación de los modos y frecuencias de un marco de concreto ................... 23 4.1 Descripción del modelo ..................................................................................... 23 4.2 Descripción del código....................................................................................... 24 4.3 Comandos adicionales empleados ...................................................................... 26 Análisis dinámico lineal de una columna ............................................................... 31 5.1 Descripción del modelo ..................................................................................... 31 x 6. 7. 8. 5.2 Descripción del código....................................................................................... 32 5.3 Comandos adicionales empleados ...................................................................... 35 Análisis estático no lineal de un marco conformado por perfiles metálicos ......... 41 6.1 Descripción del modelo ..................................................................................... 41 6.2 Descripción del código....................................................................................... 42 6.3 Comandos adicionales empleados ...................................................................... 46 Análisis dinámico no lineal de un marco de concreto reforzado ........................... 53 7.1 Descripción del modelo ..................................................................................... 53 7.2 Descripción del código....................................................................................... 54 7.3 Comandos adicionales empleados ...................................................................... 58 Análisis dinámico de un marco reforzado con amortiguador viscoso................... 67 8.1 Descripción del modelo ..................................................................................... 67 8.2 Descripción del código....................................................................................... 68 8.3 Comandos adicionales empleados ...................................................................... 72 9. Análisis dinámico de un marco reforzado con un contraventeo restringido al pandeo ............................................................................................................................ 77 9.1 Descripción del modelo ..................................................................................... 77 9.2 Descripción del código....................................................................................... 79 10. Análisis dinámico de un marco reforzado con un contraventeo convencional ..... 87 10.1 Descripción del modelo .................................................................................. 87 10.2 Descripción del código ................................................................................... 88 10.3 Comandos adicionales empleados................................................................... 91 11. Análisis dinámico incremental (ADI) ..................................................................... 95 11.1 Descripción del modelo .................................................................................. 95 11.2 Descripción del código ................................................................................... 95 12. Conclusiones .......................................................................................................... 101 Referencias ................................................................................................................... 103 1 1. Introducción Este libro se escribe con la finalidad de introducir a los nuevos usuarios de OpenSees en el modelado y análisis de estructuras por medio de esta herramienta. Debido a que el manual está dirigido a nuevos usuarios, el contenido aquí presentado resulta ser básico y se recomienda consultar el manual en línea del programa para aclaraciones y discusiones más profundas sobre las posibilidades y limitaciones de éste. Es importante indicar que algunos de los ejemplos discutidos en este documento son procedentes de la página en línea. Este documento inicia con una introducción a OpenSees y al lenguaje Tcl. Se presenta el ambiente de OpenSees explicando sus características y ventajas. Se indica la manera de evaluar expresiones matemáticas, de establecer variables y de definir estructuras de control básicas en lenguaje Tcl. Esta sección permite al lector familiarizarse con el modelado en OpenSees y brinda los conocimientos elementales para el manejo del lenguaje Tcl. En el Capítulo 2 se presenta un ejemplo de modelado y análisis estático de una armadura en 2D. La estructura se modela y analiza linealmente bajo cargas estáticas. El objetivo de este ejemplo es brindar una introducción al modelado y análisis de estructuras en OpenSees a través de un ejemplo sencillo conformado por elementos con secciones generales. En el Capítulo 3 se presenta un ejemplo de determinación de los modos y frecuencias de un marco de concreto. Pare ello, se modela un marco de concreto de dos niveles y una crujía. Posteriormente, se determinan las frecuencias naturales y modos de vibrar de la estructura. A través de este ejemplo se aprende a definir materiales y se conoce el proceso para establecer secciones de concreto en OpenSees. De manera adicional, se aprende a definir masas y a determinar las frecuencias naturales de una estructura. 2 En el Capítulo 4 se realiza un análisis dinámico lineal de una columna; en donde se modela un elemento con una sección transversal general y una masa actuante en la parte superior. Se realiza un análisis dinámico de la estructura sometiéndola a un registro de aceleraciones en su base. Este ejemplo permite conocer el procedimiento para realizar un análisis en el tiempo de una estructura sencilla, mostrando además la manera de simular movimientos sísmicos en OpenSees. En el Capítulo 5 se realiza un análisis estático no lineal (también conocido como pushover) de un marco de tres niveles y dos crujías en 2D conformado por perfiles metálicos. A través de este ejemplo se aprende la forma de definir secciones metálicas en cajón y doble T en Opensees. Se indica la manera de crear elementos con articulaciones plásticas y se describe el proceso para realizar un análisis estático no lineal. En el Capítulo 6 se presenta el análisis dinámico no lineal de un marco de concreto reforzado. La estructura, que consta de tres niveles y tres crujías, es sometida a un un movimiento sísmico en la base. El ejemplo ilustra el manejo de comandos de control para el modelado de estructuras, describe la manera de definir el amortiguamiento estructural y permite dar una introducción al daño estructural. En los capítulos 7, 8 y 9 se presentan análisis dinámicos de un marco equipado con un amortiguador viscoso, un contraventeo restringido al pandeo, y un contraventeo convencional, respectivamente. El marco de concreto reforzado consta de un nivel y una crujía. En cada capítulo se realizan análisis dinámicos y se discutirán los resultados obtenidos. A través de estos ejemplos se aprende la manera de modelar disipadores viscosos, contraventeos restringidos al pandeo y contraventeos convencionales en OpenSees. Finalmente, en el Capítulo 10 se describe una manera de realizar un Análisis Dinámico Incremental (ADI) en OpenSees. A través de este ejemplo se muestra una de las grandes ventajas de OpenSees, que es su capacidad de realizar múltiples análisis a un mismo modelo de manera automatizada. 3 2. OpenSees y lenguaje TCL 2.1 Orígenes de OpenSees OpenSees (del inglés Open System for Earthquake Engineering Simulation) es un programa de licencia libre que permite analizar estructuras y modelos geotécnicos bajo cargas gravitacionales y dinámicas. Esta herramienta tiene sus orígenes en la tesis doctoral de Francis McKenna (Mackenna, 1997). Hoy en día, gracias a las aportaciones de investigadores de diferentes universidades y al patrocinio y desarrollo de la misma por parte del Pacific Earthquake Engineering Research Center de los Estados Unidos de Norteamérica, OpenSees cuenta con un gran abanico de comandos para definir materiales, elementos y procedimientos de análisis. A pesar que el código de OpenSees fue definido originalmente en lenguaje C++, los usuarios deben de combinar el uso de comandos preestablecidos, los cuales llaman procedimientos para la definición y análisis del modelo, con instrucciones en TCL (del inglés Tool Command Language) para el uso del programa. Por este motivo, es necesario contar con un conocimiento fundamental del lenguaje TCL para un manejo básico de OpenSees. Al ser OpenSees un programa de licencia libre, éste se encuentra en continuo desarrollo y algunas de las estructuras de sus comandos pueden variar con el paso del tiempo. Sin embargo, en la página en internet (OpenSees, 2018) del programa es posible encontrar información actualizada sobre las modificaciones que han tenido lugar en el manejo de OpenSees. Debido a lo anterior, se recomienda recurrir a dicha página oficial de manera frecuente. 4 2.2 Ambiente de OpenSees Para modelar y analizar un sistema estructural, el usuario debe definir tres diferentes conjuntos de elementos a OpenSees. Estos conjuntos son: ModelBuilder, Analysis y Recorder, siendo estos comunicados por el objeto Domain. La Figura 2.1 muestra un esquema simplificado de estos elementos. Domain ModelBuilder Analysis Recorder Figura 2.1 Ambiente de OpenSees ModelBuilder. Es la parte del programa donde se definen los elementos para construir el modelo, es decir, define nodos, restricciones, masas, materiales, secciones, elementos, patrones de carga, etc. Una vez creado, el modelo se almacena en el objeto Domain y éste, a su vez, lo provee a los objetos Analysis y Recorder. Analysis. Determina el estado del modelo para cada instante de tiempo, t. Este se compone por diferentes objetos que definen el tipo de análisis que realizará el programa. Recorder. Este objeto crea y guarda el registro de los diferentes estados del modelo durante su análisis. 2.3 Interfaz de OpenSees En la Figura 2.2 muestra la interfaz del programa. Como ya se mencionó, OpenSees es un programa que utiliza líneas de código para la creación y análisis de los modelos a estudiar. Esta característica hace que el programa se apoye fuertemente en editores de texto. Desde la página oficial de OpenSees es posible descargar de manera gratuita programas como 5 CypressEditor (Shojaie, 2018), que es un editor de texto especialmente diseñado para ser utilizado con OpenSees. Figura 2.2 Interfaz de OpenSees A pesar de que es posible generar ventanas para la visualización de modelos desarrollados, el programa no cuenta con una interfaz gráfica propia que apoye al usuario en el trazado de sus modelos; facilidad con la que sí cuentan algunos programas comerciales. Debido a esto, un nuevo usuario del programa encontrará diversas problemáticas al momento de elaborar sus primeros modelos. Para subsanar esta dificultad, actualmente es posible descargar programas adicionales que actúan como interfaces gráficas, por ejemplo: OpenSees Navigator (OpenSees, 2010) o GID+OpenSees (Papanikolaou, et al., 2017). 2.4 Descarga de OpenSees OpenSees es un programa de licencia libre; por lo que es posible instalarlo y compartirlo sin algún inconveniente. Para descargar el programa es necesario recurrir a su página en línea (OpenSees, 2010): http://opensees.berkeley.edu/ Una vez que el usuario se registra en el sitio, éste podrá descargar dos archivos necesarios para la instalación y operación de OpenSees. El primero contiene el ejecutable del 6 programa y el segundo las librerías de Tcl. La descripción completa del proceso de descarga junto con sus consideraciones se encuentra en la página en línea (OpenSees, 2010). 2.5 Conocimientos básicos del lenguaje Tcl El lenguaje Tcl es utilizado en OpenSees para ejecutar los comandos del programa y crear el modelo a analizar. Debido a su estructura simple y facilidad de manejo, este lenguaje es utilizado para el desarrollo rápido de aplicaciones. Las principales funciones que se utilizan de este lenguaje, al modelar sistemas estructurales en OpenSees, son el almacenamiento de valores en variables, evaluación de expresiones matemáticas, manejo de vectores, uso de estructuras de control (if, for, foreach, while) y edición de archivos. A continuación se describen las funciones antes enlistadas y se brinda un breve ejemplo de cada una de ellas. Se recomienda insertar los comandos directamente en el cursor del programa para observar su funcionamiento. Comentarios. Para introducir un comentario en el modelo basta con escribir el símbolo “#”. Todo el texto de la fila que se encuentre posterior al símbolo será considerado como comentario. A pesar de que estas líneas de código son ignoradas por el programa, se recomienda a los usuarios emplearlos de manera regular para describir el funcionamiento de su modelo y así facilitar su posterior revisión. # Este texto es un comentario. Introducción de texto en la interfaz. Es posible mostrar líneas de texto en la interfaz de OpenSees. Estas líneas de texto son de utilidad cuando se requiere verificar la información introducida al modelo y para indicarle al usuario el proceso en ejecución por el programa. Para mostrar las líneas de texto se emplea el comando puts. # Para usar este comando, la línea de texto debe encontrarse entre comillas. puts "Curso OpenSees" 7 Almacenar líneas de texto. Las líneas de texto también pueden ser almacenadas en variables. Para almacenar texto o valores numéricos se utiliza el comando set. Esta función es especialmente útil ya que puede ser utilizada para almacenar, por ejemplo, rutas a diferentes carpetas de la computadora, en las que se podrían almacenar el modelo a analizar o la información procedente de los análisis. # El texto que se encuentra entre las comillas se guarda en la variable Titulo. set Titulo "Curso de OpenSees" Almacenar valores numéricos. Como se mencionó antes, el comando set también permite almacenar valores numéricos. En este caso, en el valor a guardar no se coloca entre comillas. # EL valor 2 (flotante) se guarda en la variable a. set a 2.0 Llamar líneas de texto y valores almacenados. Para obtener el contenido de una variable, sin importar si este es texto o un valor numérico, se coloca el símbolo “$” seguido por la variable de interés. puts "La variable a contiene el valor: $a" puts "La variable Titulo contiene el texto: $Titulo" Evaluación de expresiones matemáticas. Para evaluar expresiones matemáticas se utiliza el comando expr seguido por la operación a realizar. # El símbolo ";" le indican al programa que pase a la siguiente línea. expr 2.0 + 3.0; # Suma. # Es expr expr expr expr expr posible evaluar expresiones llamando variables. $a - 3.0; # Resta. $a*3.0; # Multiplicación. $a/3.0; # División. $a**2.0; # Elevar al cuadrado. $a**0.5; # Raíz cuadrada. 8 # Se puede definir una variable usando el comando set, en este caso se necesita colocar la expresión a evaluar entre corchetes. set b [expr $a + 3.0] Manejo de vectores. Para definir un vector se utiliza el comando list seguido por los valores que componen al vector. Al igual que con el comando expr, para guardar la lista en una variable, es necesario definir el vector entre corchetes. # Se define un vector en la variable x. set x [list 100 200 300] Para obtener valores de un vector se utiliza el comando lindex seguido por el vector de interés y la posición del valor deseado. Es importante indicar que los elementos del vector se enumeran empezando desde el 0. puts "[lindex $x 1]"; # Se llamará el valor el segundo valor (200) del vector x. puts "[lindex $x 0]"; # Se llamará el valor primer valor (100) del vector x. El comando lappend nos permite agregar un elemento adicional a un vector ya existente. Es este caso no es necesario emplear al símbolo “$” de manera conjunta con el nombre del vector. # Se agrega el valor 175 al vector x. lappend x 175 También es posible llamar valores de un vector previamente definido y guardarlos en una variable. # Se llamará el cuarto valor del vector x, el cual corresponde al número 175 que acabamos de agregar, y se almacenará en la variable c. set c [lindex $x 3] Ciclo for. Para definir un ciclo for es necesario definir la variable de control con el valor inicial del ciclo. Posteriormente, se establece la condicionante del ciclo y su 9 incremento. Los comandos a realizar en cada ciclo deberán están contenidos entre llaves dentro del ciclo for. # for {Var. Control} {Condición} {Incremento (sumar dos al finalizar cada ciclo)} {Instrucciones del ciclo} for {set i 1} {$i < 10} {incr i 2} { puts "$i" } # Nota: al omitir el valor del incremento, se considera que la variable de control aumenta en una unidad. for {set i 1} {$i < 10} {incr i} { puts "$i" } Es importante dejar un espacio de separación entre las llaves que delimitan los elementos del ciclo for. If. Para definir un condicional if, sólo es necesario definir la condicionante seguida de los comandos a realizar. Ambos elementos, condicionante y comando, deberán estar delimitados por llaves y con un espacio de separación entre estas. # if {Condición} {Instrucciones} Creación y edición de archivos de texto. Para crear un archivo de texto de utiliza el comando open seguido del nombre del archivo y su respectiva extensión. El comando puts permite introducir datos en el archivo. El comando close permite cerrar el archivo creado. # La variable definida al crear el archivo (“file1"), sirve para indicarle al programa que archivo será afectado con los posteriores comandos puts y close. set file1 [open Archivo.out w] puts $file1 "Números del 1 al 10" for {set i 1} {$i <= 10} {incr i} { if {$i == 5} { puts $file1 "Vamos a la mitad $i" } else { puts $file1 "$i" } } close $file1 10 2.6 Procedimientos Otra de las grandes ventas de OpenSees es el uso de procedimientos, que son un bloque de comandos agrupados para realizar una tarea específica. Como ejemplo, en las siguientes líneas se presenta la definición de un procedimiento y su llamado. Se inicia con la palabra reservada proc, seguida del nombre del procedimiento (en este caso “Periodo”) y los parámetros que usa en su tarea (en este caso “m” y “k”). Después se define un bloque de instrucciones que son ejecutadas cuando se llama a la última línea, es decir: “Periodo 1 1”. proc Periodo {m k} { if {$m <= 0} { puts "La masa debe ser mayor que cero."; } elseif {$k<=0} { puts "La rigidez debe ser mayor que cero."; } else { set T [expr 2*3.1416*($m/$k)**0.5]; return $T; } } # cerrar las llaves de los proc para indicar a Opensees el fin de éste. Periodo 1 1 2.7 Introducción de comandos en OpenSees Existen dos formas de introducir comandos en OpenSees. La primera consiste en escribir línea por línea los comandos que componen al modelo. Claramente esta manera es ineficiente y desaprovecha muchas de las ventajas que ofrece el programa. La segunda manera, que resulta más conveniente, consiste en crear un archivo de texto y llamarlo desde la interfaz del programa. Con esto el proceso de análisis se vuelve mucho más eficiente y resulta posible, con unas cuantas líneas de código adicionales, realizar diversos análisis al modelo estructural de manera automatizada. Para llamar un archivo de texto con los comandos que componen al modelo es necesario utilizar el comando source seguido de la ruta que contiene el archivo de texto y el nombre del archivo con su respectiva extensión. Es importante indicar que la extensión del archivo de texto deberá ser .tcl, de otra manera el programa no lo reconocerá. # source RutaCarpeta/NombreArchivo.tcl 11 2.8 Visualización del modelo A través del comando recorder display es posible generar una ventana con la representación gráfica del modelo construido. Este comando cuenta con diferentes elementos, mismos que se describen abajo. La Figura 2.3 muestra un esquema con los elementos de una proyección. v (x,y) n u Figura 2.3 Elementos de una proyección, adaptada de (Bell, 2018) A continuación, se presenta un ejemplo del uso del comando recorder display. El primer elemento indica el nombre de la ventana generada, en este caso, la ventana se llamará “Modelo”. Siempre deberá ir entre comillas. Los siguientes dos números, 10 y 10, brindan las coordenadas de la esquina superior izquierda de la ventana, siendo estas relativas al borde de la pantalla. Los últimos dos números, 600 y 600, indican el ancho y la altura de la ventana en pixeles. Existes otros sub-comandos que se deben definir: prp (de Projection Reference Point) define el centro y dirección de la proyección. En este caso, en dirección del eje n. vup es un vector que indica el eje vertical de la proyección. En este caso, en dirección del eje v. 12 vpn es el vector normal del plano de la proyección. display recibe el número de modo del modelo, el factor de escala de nodos, y el factor de escala de la respuesta. ViewScale es un factor de escala que se debe de ajustar en función de cada modelo. Nótese que, no es necesario este comando si no se desea escalar la vista. Es suficiente definir los tres comandos anteriores. recorder display "Modelo" 10 10 600 600 -wipe; prp 0 0 50; vup 0 1 0; vpn 0 0 1; display 1 2 10; set ViewScale 5; La Figura 2.4 muestra una captura de pantalla del resultado que se obtiene al utilizar el comando recorder display. Se recomienda probar diferentes valores en los sub-comandos descritos para tener un mejor entendimiento de sus funciones. Figura 2.4 Representación gráfica de un modelo generado por el comando recorder display 2.9 Ayudas disponibles en línea En la página oficial de OpenSees (OpenSees, 2010) es posible encontrar materiales de apoyo para orientar a los usuarios en el uso del programa. Las ayudas más relevantes son: 13 - Manual de inicio de OpenSees (Getting Started Manual). Esta ayuda describe el proceso de descarga e instalación de OpenSees y explica los conceptos más elementales del programa. - Manual de los comandos de OpenSees (Command Manual). En esta sección de la página web es posible encontrar la descripción de cada uno de los comandos que se emplean en OpenSees. Indica cómo usar los comandos para crear el modelo, las características de cada uno de los objetos que pueden conforman el análisis y cómo obtener los resultados. - Lista de ejemplos (Examples). Para ayudar a los nuevos usuarios de OpenSees, en esta sección es posible encontrar ejemplos de una gran variedad de estructuras siendo analizadas bajo diferentes tipos de solicitaciones. 2.10 Organización del documento En este documento se discuten nueve ejemplos diferentes de análisis realizados en OpenSees a diversas estructuras. En estos ejemplos primero se presenta el modelo a analizar; posteriormente, se describe el código del modelo que se localiza al final del ejemplo. También se proporciona una lista de los comandos que se presentan en el ejemplo. En la lista de comandos se incluyen, entre corchetes, los parámetros que cada comando necesita para ser ejecutado. Adicionalmente, se pone a disposición de los lectores archivos complementarios que incluyen los códigos de los modelos en extensión .tcl y un registro sísmico para emplear en los análisis dinámicos. Este contenido puede ser descargado de manera libre en el vínculo ya señalado o desde la página web de Búsqueda de Series del Instituto de Ingeniería de la UNAM: http://aplicaciones.iingen.unam.mx/ConsultasSPII/Buscarpublicacion.aspx. 15 3. Modelado y análisis estático de una armadura 3.1 Descripción del modelo En este ejemplo se realiza el análisis estático de una armadura compuesta por elementos se sección general (Figura 3.1). No se considera ningún efecto no lineal. Las unidades del modelo son N y m. El modelo a analizar es una armadura con dos apoyos fijos y uno móvil. La sección transversal de las barras de la cuerda inferior (en color gris) cuenta con un área de 10 cm2 ; el área del resto de las barras (en color negro) es igual a 5 cm2. En la armadura actúan dos cargas en el Nodo 7, una vertical de 20 kN y una horizontal de 10 kN. 4 2 8 4 1 6 9 10 5 11 1 6 2 3 4m 3 5 4m 3m 7 7 10 kN 20 kN 4m Figura 3.1 Esquema de la armadura analizada en el ejemplo. 16 3.2 Descripción del código Al final de esta sección se muestra el código tcl de la armadura. Se recomienda seguirlo mientras se lee este ejemplo. El punto y coma se usa para inidicar la terminación de los comandos, de tal manera que Opensees lo interpreta como una instrucción completa. Nótese (línea 6 del código) que al inicio de cada modelo se inserta el comando wipe para borrar todo elemento que se encuentre almacenado en la memoria de OpenSees. Para iniciar un modelo en OpenSees es necesario utilizar el comando model BasicBuilder (línea 7). En este caso, por tratarse de un modelo en 2D, se indican dos dimensiones (X, Y) y dos grados de libertad para cada nodo. Esto último debido a que es una armadura y no se consideran giros en los nodos; sólo desplazamientos en X y Y. De la línea 11 a 17 se definen los nodos de la armadura, para hacer esto se ha empleado el comando node, seguido por la etiqueta o nombre del nodo que se desea definir, la coordenada del nodo en X y la coordenada del nodo en Y. El comando fix, presente en las líneas 24 a 26, define los apoyos de la armadura. De la Figura 3.1 se observa que ésta tiene tres apoyos, dos fijos y uno móvil. Al usar el comando fix se debe de indicar la etiqueta del nodo que tendrá la restricción seguida por los grados de libertad restringidos (X, Y y Giro). Este comando considera un valor igual a 0 como libre y un valor igual a 1 como fijo. Como sólo se indicaron dos grados de libertad por nodo, se brindan los estados (libre o restringido) únicamente de los desplazamientos horizontales y verticales. En la línea 31 del código se define el material del cual estarán conformadas las barras de la armadura. Como se indicó antes, no se consideran no linealidades mecánicas en la armadura; por lo que se utiliza el comando uniaxialMaterial Elastic, el cual sólo requiere de dos parámetros: 1) la etiqueta con la cual se guarda el material, y 2) su módulo de elasticidad. Para este caso se utiliza un módulo de elasticidad igual a 200 GN/m2 = 200 x 109 N/m2. En las líneas 37 a 51 se definen los elementos de la armadura. En este caso se utiliza el comando element truss para todas las barras de la armadura. Dicho comando requiere la 17 etiqueta del elemento que se está definiendo, sus nodos inicial y final, el área transversal de la sección y la etiqueta del material (ya existente) que lo compone. Hasta este punto, la geometría del modelo ya ha sido completamente definida. A continuación, se procede a definir las cargas actuantes sobre la armadura. En la línea 54 se define el objeto timeSeries que indica al programa la forma en que se debe de aplicar la carga durante el análisis. En este modelo se utilizó el comando timeSeries Linear que únicamente requiere la etiqueta que tendrá el objeto timeSeries definido. En la Figura 3.2 se muestra la manera en que el comando timeSeries Linear aplica la carga durante el análisis. Como el nombre del comando indica, la carga se aplica de manera lineal a lo largo del tiempo en el Domain, por lo que las fuerzas actuantes que están ligadas a este objeto se incrementan de manera gradual durante el análisis hasta alcanzar los valores definidos por el usuario. Los nuevos usuarios deben prestar especial atención a este comando, ya que su omisión en el código es un error común cuando se comienza a modelar en OpenSees1. Factor cFactor 1 Tiempo Figura 3.2 Variación del factor de carga en función del tiempo considerada por el comando timeSeries Linear, adaptada de (OpenSees, 2018) Una vez definido el objeto timeSeries, se procede a definir las cargas actuantes sobre la armadura, para esto se utiliza el comando pattern Plain. Para definir este comando se 1 Debido a su estructura tan sencilla es fácil pasarlo por alto, sin embargo, sin este objeto, el programa no será capaz de realizar ningún análisis al modelo construido ya que desconocerá cómo aplicar las cargas. 18 requiere indicar al programa la etiqueta con la que se identifica al patrón de cargas seguido de la etiqueta del objeto timeSeries previamente definido. Este comando requiere de manera adicional el definir, entre llaves, las cargas asociadas a él. Las cargas pueden ser puntuales o distribuidas. En este caso, al tener cargas puntuales actuando en el Nodo 7 de la armadura, se emplea el comando load; mismo que requiere la etiqueta del nodo donde actúan las cargas, seguido por los valores de las cargas actuantes. En las líneas 61 a 67 se encuentran los comandos que generan la ventana con la representación gráfica de la armadura. Estos comandos ya han sido explicados en el capítulo introductorio. En las líneas 71 y 72 se definen los archivos de salida. En este caso para el Nodo 7 y el Elemento 3. Al contar ahora con el modelo y las cargas actuantes sobre él, se pude proceder a definir el análisis estático. En OpenSees, un análisis se conforma por diferentes elementos que son definidos por el usuario. Estos elementos son: System, Numberer, Contraints, Test, Integrator, Algorithm, Analysis y Analyze. A continuación, se ofrece una breve descripción de la función de estos elementos. Para una descripción más detallada se recomienda consultar la guía en línea del programa (OpenSees, 2018). El objeto system le indica al programa como construir y resolver el sistema de ecuaciones del modelo. En este caso se empleó el comando system BandGeneral. El objeto numberer enumera los grados de libertad del modelo. En este caso se empleó el comando numberer RCM. El objeto constraints define la manera en la que se consideran las condiciones de frontera y/o los desplazamientos impuestos. En este caso se empleó el comando constraints Plain. El objeto test indica la tolerancia de convergencia que se le solicita al programa al momento de realizar el análisis. En este caso se empleó el comando test NormDispIncr; el 19 cual requiere la tolerancia que debe alcanzar el programa seguido por el número de iteraciones máximas para alcanzar dicha tolerancia. El objeto integrator define el siguiente instante de tiempo t para el cual el programa determina el estado de la estructura. En este caso se empleó el comando integrator LoadControl el cual sólo requiere el factor de incremento de carga para ser definido. En este caso se eligió 0.1. El objeto algorithm define los pasos a seguir para resolver las ecuaciones no lineales durante el análisis. En este caso se empleó el comando algorithm Newton. El objeto analysis define el tipo de análisis a realizar. En este caso se empleó el comando analysis Static. Finalmente, el objeto analyze da la instrucción de realizar el análisis con los elementos previamente definidos. El comando analyze requiere el número de pasos en los que el análisis será realizado. En este caso se eligieron 10 pasos. 3.3 Comandos adicionales empleados Iniciales: - wipe model BasicBuilder -ndm [dimensiones del modelo] -ndf [grados de libertad por nodo] Nodos: - node [Etiqueta del nodo] [Coor X] [Coor Y] fix [Etiqueta nodo existente] [Fx] [Fy] [M] Materiales: - uniaxialMaterial Elastic [Etiqueta del material] [Módulo de elasticidad] 20 Elemento: - element truss [Etiqueta del elemento] [Nodo i] [Nodo f] [Área transversal] [Etiqueta material existente] Cargas: - timeSeries Linear [Etiqueta del timeSeries] pattern Plain [Etiqueta del patron de carga] [Etiqueta timeSeries existente] load [Etiqueta nodo existente] [Carga en X] [Carga en Y] [Momento] Archivos de salida: - recorder Node [-file Archivo -time -node $nodo -dof $DOFs $ tipoResp.] recorder Element [-file Archivo -time -ele $elemento $tipoRespuesta] Análisis: - system BandGeneral numberer RCM constraints Plain test NormDispIncr [Tolerancia] [Máximo número de iteraciones] integrator LoadControl [Factor incremento de carga] algorithm Newton analysis Static analyze [Pasos totales del análisis] 21 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 #------------------------------------------------------------------------# Modelado y análisis estático de una armadura. # Unidades del modelo: [N,m] #------------------------------------------------------------------------wipe; model BasicBuilder -ndm 2 -ndf 2; # Se establecen los nodos del modelo y sus respectivas restricciones. # Solo se brindan dos coordenadas ya que el modelo es en 2D.(ID nodo, X, Y) node 1 0.0 0.0 node 2 0.0 3.0 node 3 4.0 0.0 node 4 4.0 3.0 node 5 8.0 0.0 node 6 8.0 3.0 node 7 12.0 0.0 # Se definen los apoyos # diferentes, dos fijos # 1 - Grado de libertad # 0 - Grado de libertad # (Fx, Fy, M) fix 1 1 1 fix 3 1 1 fix 5 0 1 de la estructura, observe que existen dos apoyos en los nodos 1 y 3, y uno móvil en el nodo 5. restringido. no restringido. # Se define el material de los elementos de la armadura. set TagMaterial 1 uniaxialMaterial Elastic $TagMaterial 200e9 # Se definen los elementos de la armadura. # Barras del tirante inferior. # Área del elemento = 0.001 m2 = 10 cm2 element truss 1 1 3 0.001 $TagMaterial element truss 2 3 5 0.001 $TagMaterial element truss 3 5 7 0.001 $TagMaterial # Resto de los elementos de la armadura. # Área del elemento = 0.0005 m2 = 5 cm2 element truss 4 1 2 0.0005 $TagMaterial element truss 5 3 4 0.0005 $TagMaterial element truss 6 5 6 0.0005 $TagMaterial element truss 7 7 6 0.0005 $TagMaterial element truss 8 2 4 0.0005 $TagMaterial element truss 9 4 6 0.0005 $TagMaterial element truss 10 1 4 0.0005 $TagMaterial element truss 11 3 6 0.0005 $TagMaterial 22 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 # Se definen las cargas actuantes sobre la armadura. set timeLinear 1 timeSeries Linear $timeLinear pattern Plain 1 $timeLinear { # Carga de aprox 1 ton actuando en X y 2 ton actuando en Y load 7 10000 -20000 } # Se define la ventana que permitirá visualizar el modelo. recorder display "Armadura" 10 10 600 600 -wipe prp 0 0 50 vup 0 1 0 vpn 0 0 1 display 1 2 10 set ViewScale 5; # Se definen registros de salida recorder Node -file SalidaNodo7.txt -time -node 7 -dof 1 2 disp recorder Element -file SalidaElem3.txt -time -ele 3 basicForces # Se definen los parámetros del análisis estático. system BandGeneral numberer RCM constraints Plain test NormDispIncr 1.0e-6 10; integrator LoadControl 0.1 algorithm Newton analysis Static analyze 10 23 4. Determinación de los modos y frecuencias de un marco de concreto 4.1 Descripción del modelo En este ejemplo se realiza el análisis modal de un marco de cortante de concreto. Las unidades del modelo son N y m. Este ejemplo se adapta a los resultados del libro "Dynamics of Structures. Theory and application to earthquake engineering" de Anil K. Chopra (Chopra, 1995) y consiste en determinar las frecuencias y modos de vibrar del marco mostrado en la Figura 4.1. En este caso, la masa (m) fue considerada igual a 4,500 kg, la altura de entrepiso es igual a 4 m. Para las columnas se consideró una sección transversal de 0.3 m x 0.3 m con un módulo de elasticidad para el concreto igual a 20 GN/m 2 = 20 x 109 N/m2. m 5 EIc 6 6 2 EIc 4 2m 3 4m 4 5 2EIc 1 3 1 2EIc 4m 2 8m Figura 4.1 Esquema del marco analizado en el ejemplo, adaptada de (Chopra, 1995) 24 4.2 Descripción del código El código de este ejemplo se muestra al final de esta sección. Se recomienda ampliamente seguir el código mientras se lee esta sección. Para comenzar con el modelo, primero se definen tanto su número de dimensiones como el número de grados de libertad por cada nodo (ver línea 8). Al tratarse de un marco se consideran tres grados de libertad por nodo. En las líneas 12 a 21 se definen parámetros que serán de utilidad durante la construcción del modelo. Estos también facilitan la modificación del mismo de manera posterior. Los nodos del modelo y sus respectivas restricciones se definen en las líneas 25 a 34. Obsérvese que en este caso los nodos 1 y 2 se encuentran empotrados, por lo que sus tres grados de libertad se encuentran restringidos. De la línea 39 a la 42 se definen las masas actuantes en el modelo. Éstas fueron colocadas en las uniones trabe-columna. En este modelo se utilizan elementos elásticos para las trabes y columnas. Para crear estos elementos es necesario primero definir su transformada geométrica, la cual establece la relación entre el sistema de coordenadas del elemento con el sistema de coordenadas global del modelo. En este caso se utilizó el comando geomTransf Linear1, misma que no considera efectos P–Delta ni grandes deformaciones en el análisis. Este comando se encuentra en la línea 46 del código. En la Figura 4.2 se muestra la forma en que difieren las coordenadas locales de diferentes elementos con respecto al sistema de coordenadas globales. Los elementos del modelo se definen en las líneas 51 a 58 por medio del comando element elasticBeamColumn. Éste requiere, además de la etiqueta del elemento y los nodos inicial y final, el área de la sección transversal del elemento, seguido del módulo de 1 Otro error es común olvidarse del objeto geomTransf, por su estructura simple. Pero de manera similar al objeto timeSeries, éste cumple una función esencial en algunos modelos. 25 elasticidad del material que lo conforma, el momento de inercia de la sección y la transformada geométrica a la que está ligado. z z y y x x Coordenadas locales z y Y X Z Coordenadas globales Figura 4.2 Coordenadas locales y globales, adaptada de (OpenSees, 2018) Es importante mencionar que no se tienen cargas actuantes sobre el modelo, pues para realizar un análisis modal, sólo es necesario definir su geometría y sus masas actuantes. Para realizar el análisis modal, se ejecuta el comando eigen. Este comando requiere el número de eigenvalores a calcular (en este caso se solicitan dos). Los eigenvalores del modelo (𝜔𝑖2 ) son guardados en un vector. Esto se realiza en la línea 63 del código. En la línea 66 se crea un vector denominado “T”. En éste se almacenan los periodos de la estructura de manera posterior. En las líneas 68 a 86 se encuentran los comandos que crean y modifican el archivo de texto que almacenan los periodos de la estructura. En este caso el archivo de texto se llamó “Modal.out”. Para escribir los periodos del marco en el archivo se emplea un ciclo for que llama a cada uno de los eigenvalores y, por medio de la relación mostrada en la ecuación (4.1), se obtienen los periodos de la estructura (ver línea 83). 𝑇𝑖 = 2𝜋 √(𝜔𝑖2 ) (4.1) 26 Los valores de los vectores característicos de los modos de vibrar de la estructura se definen en las líneas 90 a 93. Para obtener dichos valores se emplea el comando nodeEigenvector que requiere la etiqueta del nodo del cual se obtiene el eigevector (o forma modal), el modo de vibrar que produce el eigenvector y el número de grado de libertad. Las líneas 95 y 96 escriben las formas modales normalizadas en la consola de OpenSees. En las líneas 100 a 111 se encuentran los comandos que crean las ventanas con las representaciones gráficas de los modos de vibrar de la estructura. En esto caso, para definir el modo de vibrar a mostrar se utiliza, después del comando display (líneas 104 y 111), el valor -1 para el primer modo de vibrar de la estructura y -2 para el segundo. En la Figura 4.3 se muestra una vista de los dos modos de vibrar calculador por el programa. Forma del modo 1 T1 = 0.266 s Forma del modo 2 T2 = 0.133 s Figura 4.3 Modos de vibrar del marco analizado 4.3 Comandos adicionales empleados Nodos: - mass [Etiqueta nodo existente] [Masa en X] [Masa en Y] [Masa alrededor de Z] 27 Elementos: - geomTransf Linear [Etiqueta de la transformada geométrica] element elasticBeamColumn [Etiqueta del elemento] [Nodo i] [Nodo f] [Área] [Módulo de elasticidad] [Momento inercia] [Etiqueta geomTransf existente] Análisis: - eigen -[solver (opcional)] [Número de valores solicitados] - nodeEigenvector [Etiqueta nodo existente] [Modo de vibrar] [Grado de libertad del vector] 28 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 #--------------------------------------------------------------------# Modos de marco de cortante. # Problema tomado del libro Dynamics of Structures de Anil K. Chopra. # Unidades del modelo: [N,m] #--------------------------------------------------------------------wipe; model BasicBuilder -ndm 2 -ndf 3; # Se indican 3 grados de libertad para cada nodo. # Se definen valores del modelo. set m 4500.0; # Masa actuante en el modelo. set h 4.0; # Altura de entrepiso. set A 0.09; # Área transversal de la columna. set Ic 0.000675; # Inercia de la sección de la columna. set Iv 10e12; # Inercia de la sección de la viga. Se asigna un valor # alto para considerarla rígida. set E [expr 20e9]; # Módulo de elasticidad del material del elemento. set NumModos 2; # Se define el número de modos de vibrar a obtener. set pi 3.1416; set carpeta Resultados; # Se define el nombre de la carpeta donde se guardarán los resultados. # Se node node node node node node definen los nodos de la estructura. (ID nodo, X, Y) 1 0.0 0.0 2 [expr 2*$h] 0.0 3 0.0 $h 4 [expr 2*$h] $h 5 0.0 [expr 2*$h] 6 [expr 2*$h] [expr 2*$h] # Se definen los apoyos de la estructura. fix 1 1 1 1; # Las columnas del marco se encuentran empotradas. fix 2 1 1 1 # Se definen las masas actuantes en los niveles del marco. # (ID nodo, Masa actuante en X, Masa actuante en Y, Masa actuante alrededor del eje Z). mass 3 [expr $m] 0.0 0.0 mass 4 [expr $m] 0.0 0.0 mass 5 [expr $m/2] 0.0 0.0 mass 6 [expr $m/2] 0.0 0.0 # Se define la transformación de coordenadas. set geomLinear 1 geomTransf Linear $geomLinear # Se definen los elementos del marco. Se consideran elementos con propiedades mecánicas generales. # Elementos columna. element elasticBeamColumn 1 1 3 $A $E [expr 2*$Ic] $geomLinear 29 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 element elasticBeamColumn 2 3 5 $A $E $Ic element elasticBeamColumn 3 2 4 $A $E [expr 2*$Ic] element elasticBeamColumn 4 4 6 $A $E $Ic $geomLinear $geomLinear $geomLinear # Elementos Viga. element elasticBeamColumn 5 3 4 $A $E $Iv $geomLinear element elasticBeamColumn 6 5 6 $A $E $Iv $geomLinear # Se determinan los eigenvectores y los periodos de la estructura. # El comando "eigen" brinda los eigen valores del modelo, estos valores se almacenan en la variable "eigenvalores". set eigenvalores [eigen $NumModos] # Se crea el vector "T" el cual almacenara los periodos de la estructura. set T {} file mkdir $carpeta; # Se crea la carpeta donde se almacenarán los resultados. set file1 [open $carpeta/Modal.out w]; # Se abre el archivo donde se almacenarán los resultados. puts $file1 "Los periodos de la estructura son:"; # Línea del archivo. puts "Los periodos de la estructura son:"; # Línea de la interfaz for {set i 0} {$i <= [expr $NumModos - 1]} {incr i} { # Al vector "T", hasta ahora vacío, se le agregan los periodos de la estructura por medio del comando lappend. # El comando lindex llama el valor localizado en la posición $i del vector "eigenvalores". set T [lappend T [expr 2*$pi/([lindex $eigenvalores $i]**0.5)]] puts $file1 "T[expr $i+1]: [lindex $T $i]" puts "T[expr $i+1]: [lindex $T $i]" } close $file1 # El comando nodeEigenvector brinda los valores del vector característico. # (ID nodo, Vector característico, Grado de libertad) set f11 [nodeEigenvector 3 1 1] set f21 [nodeEigenvector 5 1 1] set f12 [nodeEigenvector 3 2 1] set f22 [nodeEigenvector 5 2 1] puts "eigenvector 1: [list [expr {$f11/$f21}] [expr {$f21/$f21}] ]" puts "eigenvector 2: [list [expr {$f12/$f22}] [expr {$f22/$f22}] ]" # Se definen las ventanas que permitirán visualizar la estructura deformada. recorder display "Forma del modo 1" 10 10 350 350 -wipe prp 5 5 50; vup 0 1 0; vpn 0 0 1; 30 103 104 105 106 107 108 109 110 111 viewWindow -6 6 -6 6; display -1 2 100; recorder display "Forma del modo 2" 10 360 350 350 -wipe prp 5 5 50; vup 0 1 0; vpn 0 0 1; viewWindow -6 6 -6 6 display -2 2 100 31 5. Análisis dinámico lineal de una columna 5.1 Descripción del modelo En este ejemplo se realiza el análisis dinámico de una columna de concreto. No se considera ningún efecto no lineal. Nótese que el ejemplo es muy sencillo, pues sólo es un pretexto para aprender a realizar análisis dinámico en OpenSees. Las unidades del modelo son N, m y s. El modelo a analizar consta de una columna de concreto empotrada en la base de altura igual a 12 m (Figura 5.1). La sección transversal de la columna es rectangular con medidas de 1 m x 1 m. En la parte superior actúa una masa de 50 ton, misma que también genera una carga vertical. La columna es sometida al movimiento sísmico, registrado en la estación SCT (Instituto de Ingeniería, 2018) componente Este-Oeste, del terremoto del 19/sept/1985 de Michoacán, México. P=m∙g 2 m 1 h 1 Figura 5.1 Esquema de la columna analizada en el ejemplo. 32 5.2 Descripción del código Se comienza borrando cualquier objeto construido con anterioridad en OpenSees (comando wipe) y se define el número de dimensiones del modelo y de grados de libertad por nodo (línea 7). Los parámetros definidos entre las líneas 10 a 18 se utilizan para construir el modelo más adelante. Debido a que en este ejemplo se crean diversos archivos de resultados, se define una variable llamada “carpeta”, la cual contiene el nombre de la carpeta donde se almacenarán los archivos de resultados. De manera similar a los ejemplos anteriores, se comienza por definir los nodos del modelo (líneas 21 y 22). En este caso sólo dos son necesarios. El Nodo 1 corresponde al empotramiento y el Nodo 2 al extremo libre de la columna. Adicionalmente, la masa actuante en la parte superior de la columna se define al momento de crear el nodo 2 por medio de la adición del comando –mass. En la línea 25 se ejecuta el comando fix para empotrar el nodo inferior de la columna. Al no considerarse no linealidades geométricas ni mecánicas, se crea la transformada geométrica “Linear” (línea 29) y se emplea el comando element elasticBeamColumn para construir el elemento columna con su área, módulo de elasticidad y momento de inercia correspondiente (línea 32). En la línea 35 se usa el comando file mkdir para crear la carpeta de archivos de resultados. En las líneas 38, 40, 43 y 46 se definen los archivos de resultados solicitados al programa. Es importante indicar que OpenSees no generará ningún archivo de resultados no solicitado por el usuario, y los que sí sean creados sólo mostrarán su información una vez que el programa sea cerrado o bien se ejecute el comando wipe. Nótese que se utilizan tres modalidades del comando recorder, es decir: recorder Node, recorder Element y recorder Drift. Los primeros dos, como su nombre lo indica, generan el registro de datos relacionados con los nodos y los elementos especificados. En este ejemplo se solicitaron los desplazamientos en el extremo libre de la columna y las 33 reacciones en la base. Para el caso del “recorder Element”, se indicó al programa que registrara las fuerzas actuantes sobre el elemento columna. Por último, el registro drift guarda la distorsión de entrepiso de la columna, siendo este parámetro igual a la diferencia de los desplazamientos relativos existentes entre el Nodo 2 y el Nodo 1, dividido por la distancia vertical que los separa. Nótese que existen más registros posibles que los cuatro aquí mostrados, por lo que se recomienda recurrir a la manual del programa para consultar otros registros de interés. 1 Entre las líneas 49 a 54 se crea el patrón de carga. En OpenSees primero es necesario realizar el análisis estático antes que el dinámico por lo que en este caso sólo se considera una carga vertical generada por la masa en el extremo libre. Después de generar la ventana con la representación gráfica del modelo (líneas 57 a 63), se procede a realizar el análisis estático. Esto ocurre de la línea 65 a la 72. En la línea 78 se emplea el comando loadConst que indica al programa que conserve las cargas aplicadas hasta el momento en análisis posteriores. El adicionar el comando –time permite fijar el tiempo del programa en el valor indicado, en este caso se reinicia el tiempo del programa a cero. De la línea 80 a la 85 se definen parámetros que se emplearan en el análisis dinámico. Éstos son: a) un factor de conversión de unidades, en este caso 0.01 para pasar de cm/s 2 a m/s2; b) el paso de tiempo; c) los puntos que se considerarán del registro de aceleraciones; d) el nombre del archivo que contiene el registro de aceleraciones; y e) la dirección en que se aplicarán las aceleraciones. Posteriormente, se crea el patrón de cargas por medio del comando pattern UniformExcitation. Dicho comando requiere la etiqueta que tendrá el patrón de cargas, seguido de la dirección en la cual se aplicará y, al agregar el comando –accel, se procede a indicar el diferencial de tiempo y el nombre del archivo del registro de aceleraciones. Por último, se aplica el comando –factor, el cual es opcional, permitiendo éste escalar los datos 1 También es posible guardar los archivos en formato “.xml”. Los archivos “.xml” presentan líneas de texto con información del contenido del registro. 34 del registro de aceleraciones de una forma práctica. El comando pattern UniformaExcitation también puede ser utilizado para imponer al modelo un registro de velocidades. Antes de realizar el análisis dinámico, las líneas 92 a 94 definen el amortiguamiento de la estructura. Esto se realiza por medio del comando rayleigh el cual asigna un amortiguamiento de Rayleigh a todos los elementos construidos anteriormente. Es importante recordar que dicho amortiguamiento es proporcional a la rigidez y a la masa de la estructura. Nótese que OpenSees tiene la posibilidad de usar tres diferentes matrices de rigidez: la “actualizada” la cual es la matriz de rigidez en cada iteración de una unidad de tiempo; la “inicial” que corresponde a la matriz de rigidez original del modelo, sin considerar degradación; y la “comprometida” que es la matriz resultante del último paso del análisis que comprometió la matriz de rigidez. En este ejemplo, se considera únicamente la matriz de rigidez comprometida para definir el amortiguamiento de Rayleigh. Para este caso, realmente no es importante que matriz de rigidez usar para definir el amortiguamiento ya que, al ser un análisis lineal, la matriz de rigidez no cambia durante el análisis. Para finalizar el ejemplo se procede a realizar el análisis dinámico. Los comandos que componen dicho análisis se encuentran entre las líneas 99 a 106. En la línea 105 se utiliza el comando analysis Transient para indicar que el análisis a realizar es dinámico y en la 106 se emplea el comando analyze seguido del número de puntos a considerar y el paso de tiempo. En la Figura 5.2 se muestra el registro de desplazamientos laterales de la parte superior de la columna; obtenidos del archivo de salida “DespTop.out” (ver línea 38). En esta gráfica, el eje horizontal indica el tiempo, en segundos, mientras que el eje vertical muestra el desplazamiento lateral del nodo 2, en metros. En este caso, el desplazamiento máximo obtenido durante el análisis dinámico de la columna fue igual a 3 cm. Se recomienda al lector variar el valor de la masa o de las dimensiones de la sección transversal de la columna para observar cómo estos parámetros afectan la respuesta máxima de la estructura. Desplazamiento, m 35 0.04 0.03 0.02 0.01 0 -0.01 -0.02 -0.03 -0.04 0 20 40 60 80 100 120 140 160 Tiempo, s Figura 5.2 Desplazamientos laterales del nodo superior de la columna 5.3 Comandos adicionales empleados Cargas: - loadConst –time[Tiempo] pattern UniformExcitation [Etiqueta del patrón] [Dirección en la que se aplicará] – accel {Series –dt [diferencial de tiempo] –filePath [Nombre del archivo]} –factor [Factor de escala o de conversión]. Archivos de salida: - Recorder Node –file [Nombre del archivo] –node [Etiqueta nodo existente] –dof [Grados de libertad a considerar] [Tipo de registro solicitado] Recorder Element –file [Nombre del archivo] –ele [Etiqueta elemento existente] [Tipo de registro solicitado] Recorder Drift –file [Nombre del archivo] –iNode [Nodos i] –jNode [Nodos j] – dof [Grado de libertad de los desplazamientos relativos] –perpDirn [Dirección que se utilizara para calcular separación entre nodos i y j] Amortiguamiento: 36 - rayleigh [AlphaMasa] [BetaRigidezActual] [BetaKInicial] [BetaKComprometida] Análisis: - eigen –fullGenLapack system UmfPack numberer RCM constraints Plain test NormDispIncr [Tolerancia] [Máximo número de iteraciones] integrator Newmark [Gamma] [Beta] algorithm Newton analysis Transient analyze [Pasos totales del análisis] [paso de tiempo] 37 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 #--------------------------------------------------------------------# Análisis dinámico lineal de una columna. # Unidades del modelo [N,m,s] #--------------------------------------------------------------------wipe; model BasicBuilder -ndm 2 -ndf 3; # Se definen valores del modelo. set h 12.0; # Altura de la columna. set m 50000; # Masa actuante en la estructura. set A 1.0; # Área transversal de la columna. set I 0.0833; # Inercia de la sección de la columna. set E 20e9; # Módulo de elasticidad del material de la columna. set carpeta ResultadosEx3; # Se define el nombre de la carpeta donde se guardarán los resultados. set pi 3.1416 set g 9.81; # Aceleración de la gravedad. # Se definen los nodos de la columna. node 1 0.0 0.0 node 2 0.0 $h -mass $m 0.0 0.0 # Se define el empotramiento de la columna. fix 1 1 1 1 # Se define la transformación de coordenadas. set geomLinear 1 geomTransf Linear $geomLinear # Se define el elemento columna. element elasticBeamColumn 1 1 2 $A $E $I $geomLinear # Se definen los registros del análisis. file mkdir $carpeta; # Carpeta donde se almacenarán los resultados. # Desplazamiento del nodo superior. recorder Node -file $carpeta/DespTop.out -time -node 2 -dof 1 2 3 disp; # Reacciones de la base. recorder Node -file $carpeta/ReaccionBase.out -time -node 1 -dof 1 2 3 reaction; # Distorsión de entrepiso. recorder Drift -file $carpeta/Drift.out -time -iNode 1 -jNode 2 -dof 1 perpDirn 2 ; # Fuerzas en la columna. recorder Element -file $carpeta/SolicitacionesCol.out -time -ele 1 force; # Se define las cargas actuantes sobre la estructura. set timeLinear 1 timeSeries Linear $timeLinear pattern Plain 1 $timeLinear { 38 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 # Fuerza aplicada en nodo 2 = masa actuante por gravedad. load 2 0.0 [expr -1*$m*$g] 0.0 } # Se define la ventana que permitirá visualizar el modelo. recorder display "Columna" 10 10 600 600 -wipe prp 0 0 50 vup 0 1 0 vpn 0 0 1 display 1 2 10 set ViewScale 5; # Se definen los parámetros del análisis estático. system BandGeneral numberer RCM constraints Plain test NormDispIncr 1.0e-6 10; integrator LoadControl 1.0 algorithm Newton analysis Static analyze 10 puts "Análisis estático finalizado." # Se define los valores para el análisis dinámico. loadConst -time 0.0 set Factor 0.01; set set set set # El registro de aceleraciones se encuentra en cm/s2, este factor lo convierte a m/s2. dt 0.01; # Diferencial de tiempo del acelerograma. Npuntos 15000; # Número de puntos del acelerograma. AccelDataFile "SCT18509.txt"; # Se indica el registro a utilizar. DirX 1; # Dirección en la que se aplicarán las aceleraciones. # Se define el patrón de aceleraciones. set accelSeries "Series -dt $dt -filePath $AccelDataFile -factor $Factor"; pattern UniformExcitation 2 $DirX -accel $accelSeries # Se define el amortiguamiento de la estructura. set freq [expr ([eigen -fullGenLapack 1]**0.5)/(2.0*$pi)] set dampRatio 0.05 rayleigh 0. 0. 0. [expr 2*$dampRatio/$freq] puts "Periodo: [expr 1.0/$freq] segundos" # Se definen los parámetros del análisis estático. system UmfPack numberer RCM constraints Plain test NormDispIncr 1.0e-8 10 39 103 104 105 106 107 108 integrator Newmark 0.5 0.25 algorithm Newton analysis Transient analyze $Npuntos $dt puts "Análisis Dinámico finalizado." 41 6. Análisis estático no lineal de un marco conformado por perfiles metálicos 6.1 Descripción del modelo En este ejemplo se realiza el análisis estático no lineal (también conocido como pushover) a un marco de acero en 2D. El marco estará compuesto por perfiles en cajón para las columnas y perfiles “I” para las vigas. En este ejemplo sí se consideran efectos no lineales. Las unidades del modelo son t (toneladas fuerza) y cm. El modelo a analizar consta de un marco de acero de tres niveles y dos crujías. Las crujías tienen 7 m de ancho cada una. La altura de entrepiso del modelo es igual a 3.5 m. Para las columnas del primer nivel se emplean perfiles en cajón cuadrados de 35 cm por lado y un espesor de placa de 5/8”. Para las columnas del segundo nivel se utilizan perfiles en cajón de las mismas dimensiones, pero con un espesor de placa de 1/2”. Las vigas del modelo están conformadas por perfiles W16x57. Se considera una carga distribuida de 1.03 y 1.17 t/m para el entrepiso y la azotea, respectivamente. En la Figura 6.1 se muestra el marco analizado en este ejemplo. OpenSees permite realizar los análisis estáticos no lineales de dos maneras: controlando los desplazamientos de un nodo especificado por el usuario y controlando las cargas laterales aplicadas a la estructura. En este ejemplo se indicará como realizar ambos procedimientos. 42 42 41 5 43 6 31 32 32 31 3 33 4 21 22 23 22 21 11 12 11 13 350 cm 13 12 700 cm 350 cm 23 2 1 350 cm 33 700 cm Figura 6.1 Esquema del marco analizado en el ejemplo 6.2 Descripción del código Se comienza a construir el modelo borrando los objetos definidos con anterioridad por medio del comando wipe (línea 5), posteriormente se indican el número de dimensiones del modelo y número de grados de libertad por nodo (línea 6). Entre las líneas 9 a 12 se definen parámetros que facilitan la creación del modelo y su posterior modificación en caso de ser necesario. Los nodos con sus respectivas restricciones se definen de la línea 16 a la 32. Para simular comportamiento de diafragmas rígidos en los niveles, se utiliza el comando equalDOF que impone desplazamientos iguales de un nodo (nodo maestro) a otro (nodo esclavo). Para usar este comando se indica al programa la etiqueta del nodo maestro seguido 43 aquella del nodo esclavo y, por último, el grado de libertad sobre el cual los desplazamientos de ambos nodos serán iguales. Esto se hace en las líneas 36 a 41. Debido a que en este ejemplo se consideran efectos no lineales es necesario definir materiales con comportamientos histeréticos. En este ejemplo se utiliza el comando uniaxialMaterial Steel02 para definir el material de los perfiles metálicos del modelo. Para usar dicho comando se requiere definir la etiqueta que tendrá el material, seguido del su esfuerzo de fluencia, su módulo de elasticidad y la relación entre la tangente post-fluencia y la tangente inicial elástica de la curva esfuerzo – deformación del material. Adicionalmente, es necesario definir siete valores adicionales (R0, CR1, CR2, a1, a2, a3 y a4) que definen el comportamiento de la curva esfuerzo – deformación una vez que se ha sobrepasado el esfuerzo de fluencia. Los valores utilizados en el ejemplo para los parámetros adicionales fueron tomados de recomendaciones de la guía en línea de OpenSees (OpenSees, 2018). Los materiales utilizados en este ejemplo se definen entre la línea 46 a 49. La Figura 6.2 muestra esquemáticamente la curva esfuerzo – deformación de un material definido por medio del comando uniaxialMaterial Steel02. Ep Esfuerzo E Deformación Figura 6.2 Curva esfuerzo – deformación de un material definido con el comando uniaxialMaterial Steel02, adaptada de (OpenSees, 2018) Una vez que los materiales han sido definidos, se procede a construir las secciones de los elementos del modelo. Para hacer esto se utiliza el comando section Fiber el cual permite crear las secciones de elementos por medio de fibras. Las fibras son elementos finitos, 44 conformados por un material previamente definido, que trabajan de manera axial. En la Figura 6.3 se muestra un esquema de las secciones empeladas en este modelo. Estas secciones son definidas entre la línea 58 a la 99. t 1.82 35 35 OR 35 x 35 x t 41.66 1.09 18.08 IPE 16 Figura 6.3 Esquema de secciones (medidas en cm) Para construir las secciones mostradas en la Figura 6.3 se utilizan los comandos patch quad, patch circ y patch rect; los cuales crean regiones de elementos fibra. Es importante indicar que estos comandos deben ser definidos entre el espacio delimitado por las llaves del comando section Fiber para relacionar las figuras que forman con la sección que se está construyendo. De manera general estos comandos requieren que se especifique el material que compondrá a las fibras y el número de éstas. En lo particular, el comando patch quad permite definir un área poligonal especificando las coordenadas de cada uno de sus vértices; por otra parte, el comando patch circ construye segmentos circulares; y por último, el comando patch rect define áreas rectangulares especificando únicamente las coordenadas de dos vértices opuestos. Para conocer más a detalle el funcionamiento de dichos comandos se recomienda recurrir al manual en línea del programa (OpenSees, 2018). Una vez definidas las secciones, es posible proceder a la definición de los elementos estructurales que integran el modelo. En este ejemplo se utilizó el comando element forceBeamColumn; que requiere la etiqueta del elemento, las etiquetas de sus nodos inicial y final, el número de subdivisiones que tendrá el elemento, la etiqueta de su sección transversal, 45 y la etiqueta de su transformada geométrica. En este ejemplo se empleó la transformada geométrica denominada Corotational, que toma en cuenta efectos no lineales debidos a deformaciones grandes. Los elementos se definen de la línea 106 a la 126. Antes de realizar el análisis estático no lineal (pushover) se realiza un análisis estático por cargas gravitacionales. Entre las líneas 129 a la 139 se define el patrón de cargas gravitacionales; mismas que se muestran en la Tabla 1. De la línea 142 a la 176 se genera la carpeta y archivos de resultados (recorders), se genera la ventana con la representación gráfica del modelo y se realiza el análisis de cargas gravitacionales. Para fijar las cargas gravitacionales como constantes en el análisis estático no lineal (pushover) se utiliza el comando loadConst. Por otra parte, para el análisis estático no lineal es necesario crear un patrón de cargas laterales. Esto se hace entre las líneas 181 a la 185. Los valores de las cargas laterales se pueden definir a partir de una distribución triangular, una distribución relativa a las masas, o proporcional al modo fundamental de vibrar. Tabla 6.1 Solicitaciones en los nodos de la estructura. nodo [t] 𝒘𝒍𝟐 𝟏𝟐 [t ∙ cm] 21 -14.42 -420.58 22 -28.84 0.0 23 -14.42 420.58 31 -14.42 -420.58 32 -28.84 0.0 33 -14.42 420.58 41 -16.38 -477.75 42 -32.76 0.0 43 -16.37 477.75 Azotea Entre-pisos Etiqueta 𝑽= 𝒘𝒍 𝟐 𝑴= 46 El análisis estático no lineal puede ser realizado por medio de dos diferentes métodos, el primero consiste en utilizar el comando integrator DisplacementControl, mientras que en el segundo se emplea el comando integrator LoadControl. El primer comando busca crear un desplazamiento determinado en un nodo de control definido por el usuario a través de la aplicación sucesiva de las cargas laterales creadas con anterioridad. El segundo no considera el desplazamiento lateral de la estructura y sólo aplica las cargas laterales un número N de veces, siendo N un valor definido por el usuario. En este ejemplo se utilizó el comando integrator DisplacementControl; indicando al programa que debe aplicar un desplazamiento en el nodo 41 igual a 75 cm. En la Figura 6.4 se muestra la curva cortante basal – desplazamiento obtenida del análisis. De las líneas 205 a 216 se muestran, en comentarios, Cortante basal, t cuáles serían las líneas a ejecutar para un análisis controlado por carga (LoadControl). 40 35 30 25 20 15 10 5 0 0 20 40 60 Desplazamiento nodo superior, cm 80 Figura 6.4 Curva cortante basal – desplazamiento 6.3 Comandos adicionales empleados Nodos: - equalDOF [Etiqueta nodo maestro] [Etiqueta nodo esclavo] [Grado de libertad restringido] 47 Materiales: - uniaxialMaterial Steel02 [Etiqueta del material] [Fy] [Módulo de elasticidad inicial] [Relación entre la tangente post fluencia y la tangente inicial elástica] [R0] [CR1] [CR2] [a1] [a2] [a3] [a4] Secciones: - - section Fiber [Etiqueta de la sección] { } patch quad [Etiqueta material existente] [Número de fibras en Z] [Número de fibras en Y] [yI] [zI] [yJ] [zJ] [yL] [zL] [yK] [zK] patch circ [Etiqueta material existente] [Número de fibras en la circunferencia] [Número de fibras en la dirección radial] [yCentro] [zCentro] [Radio interior] [Radio Exterior] [Ángulo de inicio] [Ángulo final] patch rect [Etiqueta material existente] [Número de fibras en Z] [Número de fibras en Y] [yI] [zI] [yJ] [zJ] Elementos: - geomTransf Corotational [Etiqueta de la transformada geométrica] element forceBeamColumn [Etiqueta del elemento] [Nodo i] [Nodo f] [Divisiones del elemento] [Etiqueta sección existente] [Etiqueta transformada geométrica existente] Análisis: - system UmfPack numberer RCM constraints Plain test NormDispIncr [Tolerancia] [Máximo número de iteraciones] integrator LoadControl [Factor de incremento] [Iteraciones] [Mínimo factor de incremento] [Máximo factor de incremento] integrator DisplacementControl [Node de control] [Grado de libertad del desplazamiento controlado] [Incremento del desplazamiento] [Iteraciones] algorithm Newton analysis Static analyze [Veces que se aplicarán las cargas laterales] 48 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 #------------------------------------------------------------------------# Análisis pushover de un marco compuesto por perfiles metálicos. # Unidades del modelo: [ton,cm,s] #------------------------------------------------------------------------wipe; model BasicBuilder -ndm 2 -ndf 3; # Introducción de variables. set E 2038.9; # set Li 700.0; # set hi 350.0; # set carpeta ResultadosEx4; # # Se node node node node node node node node node node node node Módulo de elasticidad del acero Ancho de crujía. Altura de entrepiso. Se define el nombre de la carpeta donde se guardarán los resultados. definen los nodos de la estructura. 11 0.0 0.0 12 $Li 0.0 13 [expr 2.0*$Li] 0.0 21 0.0 $hi 22 $Li $hi 23 [expr 2*$Li] $hi 31 0.0 [expr 2*$hi] 32 $Li [expr 2*$hi] 33 [expr 2*$Li] [expr 2*$hi] 41 0.0 [expr 3*$hi] 42 $Li [expr 3*$hi] 43 [expr 2*$Li] [expr 3*$hi] # Se definen los apoyos de la estructura. fix 11 1 1 1 fix 12 1 1 1 fix 13 1 1 1 # Se simulan diafragmas rígidos por medio de nodos esclavos. # NodTag NodTag Dof equalDOF 21 22 1 equalDOF 22 23 1 equalDOF 31 32 1 equalDOF 32 33 1 equalDOF 41 42 1 equalDOF 42 43 1 # Se definen los materiales del modelo # Comando Material Tag Fy E b R0 cR1 cR2 a1 a2 a3 a4 uniaxialMaterial Steel02 3600 2.530 $E 1e-9 20 0.925 0.15 0.0001 0.0001 0.0001 0.0001 uniaxialMaterial Steel02 5000 3.515 $E 1e-9 20 0.925 0.15 0.0001 0.0001 0.0001 0.0001 49 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 # b pendiente curva esfuerzo deformacipón posterior a la fluencia. # R´s son valores recomendados. # a parametros de endurecimiento del material posterior a la fluencia, opcionales. # Se definen los etiquetas de las secciones. set OR1 1011 set OR2 1021 set IPE16 1031 # Se definen los elementos de la estructura. # Columnas OR 35 x 35 x 5/8 Planta Baja section Fiber $OR1 { # Iy Iz Jy Jz Ky Kz Ly Lz patch quad 5000 5 5 -14.34 -17.5 14.34 -17.5 14.34 -15.92 -14.34 -15.92 patch quad 5000 5 5 15.92 -14.34 17.5 -14.34 17.5 14.34 15.92 14.34 patch quad 5000 5 5 -14.34 15.92 14.34 15.92 14.34 17.5 -14.34 17.5 patch quad 5000 5 5 -17.5 -14.34 -15.92 -14.34 -15.92 14.34 -17.5 14.34 # patch patch patch patch } circ circ circ circ 5000 5000 5000 5000 CenY 5 5 5 5 CenZ Rint Rext Start 5 -14.34 -14.34 1.58 5 14.34 -14.34 1.58 5 14.34 14.34 1.58 5 -14.34 14.34 1.58 Ang 3.16 3.16 3.16 3.16 End 180 270 0 90 Ang 270 360 90 180 # Columnas OR 35 x 35 x 1/2 Segundo Nivel. section Fiber $OR2 { # Iy Iz Jy Jz Ky Kz Ly Lz patch quad 5000 5 5 16.23 -14.96 17.5 -14.96 17.5 14.96 16.23 14.96 patch quad 5000 5 5 -14.96 -17.5 14.96 -17.5 14.96 -16.23 -14.96 -16.23 patch quad 5000 5 5 -17.5 -14.96 -16.23 -14.96 -16.23 14.96 -17.5 14.96 patch quad 5000 5 5 -14.96 16.23 14.96 16.23 14.96 17.5 -14.96 17.5 # patch patch patch patch } circ circ circ circ 5000 5000 5000 5000 CenY 4 4 4 4 CenZ Rint Rext 5 -14.96 -14.96 5 14.96 -14.96 5 14.96 14.96 5 -14.96 14.96 Start 1.27 1.27 1.27 1.27 Ang 2.54 2.54 2.54 2.54 # Vigas IR 16 in section Fiber $IPE16 { # Mat Fx Fy X1 Y1 X2 Y2 patch rect 3600 10 4 -9.04 19.01 9.04 20.83 patch rect 3600 2 4 -0.545 -19.01 0.545 19.01 patch rect 3600 10 4 -9.04 -19.01 9.04 -20.83 } # Se define la transformación geométrica. set Tcorot 1 End 180 270 0 90 Ang 270 360 90 180 50 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 geomTransf Corotational $Tcorot # Se definen los elementos columna del primer nivel. element forceBeamColumn 11 11 21 5 $OR1 $Tcorot element forceBeamColumn 12 12 22 5 $OR1 $Tcorot element forceBeamColumn 13 13 23 5 $OR1 $Tcorot # Se definen los elementos columna del segundo nivel. element forceBeamColumn 21 21 31 5 $OR2 $Tcorot element forceBeamColumn 22 22 32 5 $OR2 $Tcorot element forceBeamColumn 23 23 33 5 $OR2 $Tcorot # Se definen los elementos columna del tercer nivel. element forceBeamColumn 31 31 41 5 $OR2 $Tcorot element forceBeamColumn 32 32 42 5 $OR2 $Tcorot element forceBeamColumn 33 33 43 5 $OR2 $Tcorot # Se definen los elementos element forceBeamColumn 1 element forceBeamColumn 2 element forceBeamColumn 4 element forceBeamColumn 5 element forceBeamColumn 7 element forceBeamColumn 8 viga del marco. 21 22 5 $IPE16 $Tcorot 22 23 5 $IPE16 $Tcorot 31 32 5 $IPE16 $Tcorot 32 33 5 $IPE16 $Tcorot 41 42 5 $IPE16 $Tcorot 42 43 5 $IPE16 $Tcorot # Se definen las cargas gravitaciones actuantes sobre la estructura pattern Plain 1 Linear { load 21 0.0 -3.605 -420.58 load 22 0.0 -7.21 0.0 load 23 0.0 -3.605 420.58 load 31 0.0 -3.605 -420.58 load 32 0.0 -7.21 0.0 load 33 0.0 -3.605 420.58 load 41 0.0 -4.095 -477.75 load 42 0.0 -8.19 0.0 load 43 0.0 -4.095 477.75 } # Se definen los registros del análisis. file mkdir $carpeta; # Se crea la carpeta donde se almacenarán los resultados. # Desplazamiento del nodo de control. recorder Node -file $carpeta/DespTop.out -time -node 41 -dof 1 disp; # Reacciones en la base. recorder Node -file $carpeta/ReaccionBase.out -time -node 11 12 13 -dof 1 2 3 reaction; 51 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 # Distorsiones de entrepiso. recorder Drift -file $carpeta/Drift.out -time -iNode 11 21 31 -jNode 21 31 41 -dof 1 -perpDirn 2; # Se define la ventana que permitirá visualizar el modelo. recorder display "Pushover" 10 10 600 600 -wipe prp 0 0 50 vup 0 1 0 vpn 0 0 1 display 1 2 10 set ViewScale 5; # Se definen los parámetros del análisis estático. system UmfPack numberer RCM constraints Plain test NormDispIncr 1.0e-5 10 0; integrator LoadControl 0.1 algorithm Newton analysis Static analyze 10 loadConst -time 0.0 puts "Análisis estático finalizado." # Se realiza el análisis Pushover. # Se define el patrón de carga. pattern Plain 2 Linear { load 21 0.88 0.0 0.0 load 31 0.88 0.0 0.0 load 41 1.0 0.0 0.0 } # se define el análisis controlado por deformación set IDctrlNode 41 set DmaxPush 75.0 set DxPush 0.1 set Nsteps [expr int($DmaxPush/$DxPush)] constraints Plain; numberer RCM; system UmfPack; test NormDispIncr 1.0e-3 500 0; algorithm Newton; integrator DisplacementControl $IDctrlNode 1 $DxPush analysis Static analyze $Nsteps; puts "Análisis Pushover realizado" 52 205 206 207 208 209 210 211 212 213 214 215 216 # set loadSteps 34; # # # # # # # # Debe ser entero para ingresarlo en el comando analyze. constraints Plain; numberer RCM; system UmfPack; test NormDispIncr 1.0e-3 500 0; algorithm Newton; integrator LoadControl 0.1 2 0.1 1; analysis Static analyze $loadSteps; # puts "Análisis Pushover realizado" 53 7. Análisis dinámico no lineal de un marco de concreto reforzado 7.1 Descripción del modelo En este ejemplo se realiza un análisis dinámico a un marco de concreto reforzado en 2D. El marco está compuesto por columnas cuadradas de 30 x 30 cm y trabes de 30 x 20 cm. En este ejemplo se consideran efectos no lineales. Las unidades del modelo son N, m y s. El marco consta de tres niveles y tres crujías. La altura de entrepiso del modelo es igual a 3.5 m. El ancho de las crujías es de 8m. Las columnas del marco tienen 12 varillas del #8, estribos del #3 a cada 15 cm y recubrimiento de 6 cm. Las trabes tienen 4 varillas del #8, estribos del #2 a cada 15 cm y un recubrimiento de 6 cm. Para la azotea se considera una carga linealmente distribuida 𝜔𝑎 = 11 𝑘𝑁/𝑚 y para los entrepisos 𝜔𝑒 = 9 𝑘𝑁/𝑚. El concreto tiene un 𝑓´𝑐 = 35 𝑀𝑃𝑎. El marco será sometido a la componente Este-Oeste del movimiento sísmico del terremoto de Michoacán, México, del 19/sept/1985, registrado en la estación SCT (Instituto de Ingeniería, 2018). En la Figura 7.1 se muestra el esquema del marco analizado en este ejemplo. Una de las principales ventajas de utilizar comandos para definir la geometría y condiciones de carga del modelo, como lo hace OpenSees, es que es posible automatizar diferentes partes de estos procesos. En este ejemplo, se mostrará cómo el uso de funciones iterativas puede facilitar la construcción de los modelos estructurales en OpenSees. 54 31 30 312 32 322 311 321 331 21 20 222 231 112 122 111 0 131 8m 3.5 m 141 2 1 8m 13 132 121 3.5 m 241 12 11 10 23 232 221 3.5 m 341 22 212 211 33 332 3 8m Figura 7.1 Esquema del marco analizado en el ejemplo 7.2 Descripción del código Se comienza a construir el modelo borrando objetos definidos con anterioridad por medio del comando wipe (línea 6). Posteriormente, se indican el número de dimensiones del modelo y número de grados de libertad por nodo con el comando BasicBuilder (línea 7). Entre las líneas 10 a 23 se definen parámetros que facilitarán la creación del modelo. Se aclara que este modelo permite definir el número de crujías y niveles que tendrá marco, además de sus respectivas dimensiones. A pesar de que se permite definir las dimensiones de las columnas y trabes, es necesario ingresar datos adicionales para la correcta definición de los elementos. Las masas actuantes se definen a partir de las cargas linealmente distribuidas actuantes en cada nivel. Como se ha hecho anteriormente, las masas se ubican en las 55 conexiones viga – columna. De la línea 30 a 50 se crean los nodos que compondrán el marco. Las etiquetas de los nodos del marco, con excepción de los de la base, se nombran de acuerdo a la siguiente nomenclatura $i$j, donde $i y $j son el nivel y la crujía donde se ubica el nodo, respectivamente. Los nodos de la base se enumeran considerando únicamente el número de la crujía a la que pertenecen. Para empotrar a estos nodos se utiliza el comando fixY, el cual sirve para definir las restricciones de todos los nodos que se encuentren en una coordenada Y (vertical) establecida por el usuario. Esto se hace en la línea 53. De la línea 56 a la 62 se definen diafragmas rígidos de cada nivel por medio del comando equalDOF. Para crear las secciones de concreto de este ejemplo es necesario definir primero los materiales que las compondrán. El acero de las varillas longitudinales se define entre las líneas 72 a 75. Nótese que el comando unialxialMaterial MinMax establece las deformaciones límite que una fibra de acero puede soportar antes de fallar. Al ser necesario considerar el incremento de resistencia del concreto debido al confinamiento brindado por los estribos, tres tipos distintos de concretos deben ser definidos: 1) el concreto sin confinar exterior a los estribos, 2) el concreto confinado de las columnas, y 3) el concreto confinado de las vigas. Las propiedades mecánicas del concreto confinado se pueden determinar utilizando el modelo de Mander (Mander, et al., 1988). Los tres diferentes tipos de concreto se crean utilizando el comando uniaxialMaterial Concrete02. Los cuatro materiales mencionados anteriormente se definen entre las líneas 72 a 97. La Figura 7.2 muestra esquemáticamente el comportamiento mecánico de un material Concrete02. 56 Figura 7.2 Relación esfuerzo–deformación de Concrete 02, adaptada de (OpenSees, 2018) Las secciones de los elementos de concreto se definen entre las líneas 100 a 218 por medio del comando section fiberSec. Dichas secciones se crean definiendo el núcleo de concreto con el material de concreto confinado, posteriormente, utilizando el material del concreto sin confinar, se define el recubrimiento de la sección, ambos elementos de la sección se construyen utilizando el comando patch rect. Por último, se empela el comando fiber para definir cada una de las varillas que conforman el refuerzo de longitudinal de las secciones. La Figura 7.3 muestra un esquema de las secciones utilizadas en este ejemplo. 30 30 30 COLUMNAS E#3@15 cm, 12#8 Rec. 6 cm 20 TRABES E#2@15 cm, 4#8 Rec. 6 cm Figura 7.3 Esquema de las secciones transversales de los elementos (dimensiones en cm) 57 En este ejemplo se consideran las deformaciones producidas por esfuerzos cortantes en sección. Para realizar esto es necesario crear un material adicional (en este caso se usa Steel01 por su simplicidad) con las propiedades determinadas de acuerdo lo establecido en la referencia (California Department of Transportation, 2013). Posteriormente, utilizando el comando section Aggregator se conjugan las propiedades de la sección adicional con aquellas definidas con anterioridad. En otras palabras, la relación esfuerzo cortante – deformación del material Steel01 se agrega a las secciones hechas a base de fibras. Es importante indicar que este comando no considera una interacción entre las respuestas de los diferentes grados de libertad. Los elementos que conforman al modelo se definen de la línea 226 a la 241. Las etiquetas de los elementos se definen de la siguiente manera $i$j$e, donde $i y $j son el nivel y la crujía donde se encuentra el elemento, respectivamente, y $e es el valor para diferenciar columnas de vigas. Se usa 1 para columnas y 2 para vigas. De la línea 244 a 255 se genera la ventana con la representación gráfica del modelo y se determina el periodo de la estructura. En este caso se obtuvo un periodo fundamental 𝑇 = 0.86 𝑠. Este valor podría considerarse alto para un marco de tres niveles, pero se decidió mantener con la finalidad de obtener demandas significativas en la estructura durante el análisis dinámico. Las cargas gravitacionales y los archivos de resultados que se generan de los análisis se definen de la línea 258 a 285. El análisis estático por cargas gravitacionales se define y se realiza entre las líneas 299 a 306, al finalizar éste análisis se utiliza el comando loadConst para establecer las cargas existentes como constantes en los análisis posteriores. Antes de realizar el análisis dinámico es necesario definir el amortiguamiento de la estructura (se considera 2%). En este ejemplo no se recomienda utilizar la matriz de rigidez inicial para definir el amortiguamiento estructural ya que, al considerarse efectos mecánicos no lineales, el no tomar en cuenta la degradación de la rigidez de la estructura puede conducir a resultados desviados. También, en este ejemplo se decidió escalar la intensidad del registro sísmico al 300%; esto para provocar un daño perceptible en la estructura. 58 Obsérvese que en este modelo se empleó un número considerable de líneas de código para su elaboración. Cuando esto ocurre puede ser recomendable separar el modelo en diferentes archivos de texto los cuales podrán ser llamados posteriormente desde un único archivo raíz. Al utilizar este método es posible facilitar la revisión y modificación de modelos de gran tamaño en OpenSees. En la Figura 7.4 se muestra el registro de desplazamientos laterales calculados en el Nodo 33 del marco. Desplazamiento, m 0.30 0.20 0.10 0.00 -0.10 -0.20 -0.30 0 20 40 60 80 100 120 140 160 180 200 220 Tiempo, s Figura 7.4 Registro de desplazamiento laterales de la azotea del marco 7.3 Comandos adicionales empleados Nodos: - fixY [Coordenada Y] [Grados de libertad restringidos de los nodos existentes en el coordenada Y] Materiales: 59 - - uniaxialMaterial MinMax [Etiqueta material] [Etiqueta material existente] –min [Mínimo valor de deformación (Compresión)] -max [Máximo valor de deformación (Tensión)] uniaxialMaterial Concrete02 [Etiqueta material] [f’c] [Deformación a f´c] [Esfuerzo último] [Deformación última] [lambda] [Resistencia tensión] [Ets] uniaxialMaterial Steel01 [Etiqueta material] [Fy] [Módulo de elasticidad] [Rigidez posterior a la fluencia. Secciones: - fiber [Coordenada Y local] [Coordenada Z local] [Área de la fibra] [Etiqueta material existente] section Aggregator [Etiqueta sección] [Etiqueta material existente] [Solicitación relacionada a la deformación] –section [Etiqueta sección existente] Elementos: - geomTransf Corotational [Etiqueta de la transformada geométrica] - element forceBeamColumn [Etiqueta del elemento] [Nodo i] [Nodo f] [Divisiones del elemento] [Etiqueta sección existente] [Etiqueta transformada geométrica existente] 60 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 # # # # -----------------------------------------------------------------------Análisis dinámico no lineal de un marco de concreto. Unidades del modelo: [N,m,s] ------------------------------------------------------------------------ wipe; model BasicBuilder -ndm 2 -ndf 3; # Se definen valores para crear el modelo. set Nniveles 3; set Ncrujias 3; set L 8.0; # Ancho de crujía set H 3.5; # Altura de entrepiso. set wa 11000; # Carga azotea [N/m] set we 9000; # Carga entrepiso [N/m] set hcol 0.30; # Altura columna. set bcol 0.30; # Base columna. set hviga 0.30; # Altura viga. set bviga 0.20; # Base viga. set carpeta ResultadosEx5; # Se define el nombre de la carpeta donde se guardarán los resultados. set g 9.81; # Aceleración de la gravedad. set pi 3.1416; # Se definen las masas de cada nodo. set ma [expr $wa*$L/$g/2.0]; # Masa nodo exterior azotea. set me [expr $we*$L/$g/2.0]; # Masa nodo exterior entrepiso. # Se definen los nodos de la estructura. for {set i 0} {$i <= $Nniveles} {incr i} { for {set j 0} {$j <= $Ncrujias} {incr j} { if {$i == 0} { node $j [expr $j*$L] 0.0; } else { if {$i == $Nniveles} { if {$j == 0 || $j == $Ncrujias} { node $i$j [expr $j*$L] [expr $i*$H] -mass } else { node $i$j [expr $j*$L] [expr $i*$H] -mass } } else { if {$j == 0 || $j == $Ncrujias} { node $i$j [expr $j*$L] [expr $i*$H] -mass } else { node $i$j [expr $j*$L] [expr $i*$H] -mass } }; # Segundo else. }; # Primer else. }; # Segundo for. }; # Primer for. $ma 0.0 0.0 [expr 2.0*$ma] 0.0 0.0 $me 0.0 0.0 [expr 2.0*$me] 0.0 0.0 61 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 # Se definen los apoyos de la estructura. fixY 0.0 1 1 1 # Se crean los diafragmas rígidos entre los niveles. for {set i 1} {$i <= $Nniveles} {incr i 1} { for {set j 0} {$j <= [expr $Ncrujias-1]} {incr j 1} { set a [expr $j + 1]; set b 0 equalDOF $i$b $i$a 1 } } # Se definen los materiales de las secciones. # Tags de los materiales. set AceroTag 1 set cover35 3 set NucCol 4 set NucViga 5 # Se definen las propiedades del acero longitudinal. set fy [expr 420e6]; # Esfuerzo de fluencia. set Es [expr 200e9]; # Módulo elástico. uniaxialMaterial Steel02 [expr $AceroTag+1] $fy $Es 0.025 18.0 0.925 0.15; uniaxialMaterial MinMax $AceroTag [expr $AceroTag+1] -min -0.05 -max 0.05 # Recubrimiento, concreto no confinado. set fc [expr 35e6]; # f´c. set epss 0.005; # Deformación última. set Ec [expr 14000.*sqrt($fc/9.81*100./1e6)*9.81/100*1e6]; # Módulo elástico (fórmula de RCDF). uniaxialMaterial Concrete02 $cover35 -$fc [expr -2.0*$fc/$Ec] 0.0 -$epss 0.1 [expr 0.04*$fc] [expr 0.04*$fc/(2.0*$fc/$Ec)] ; # Concreto sin confinar. # Concreto Columna. set fcc1 [expr 37.695e6]; set eu1 [expr 0.024413]; set fcu1 [expr 7.1035e6]; # Máxima resistencia (Mander) # Deformación última (Mander) # Resistencia última (Mander) uniaxialMaterial Concrete02 $NucCol -$fcc1 [expr -2.0*$fcc1/$Ec] -$fcu1 -$eu1 0.1 [expr 0.04*$fcc1] [expr 0.04*$fcc1/(2.0*$fcc1/$Ec)]; #Concreto confinado. # Concreto Viga. set fcc2 [expr 35.876e6]; set eu2 [expr 0.020034]; set fcu2 [expr 2.835e6]; # Máxima resistencia (Mander) # Deformación última (Mander) # Resistencia última (Mander) uniaxialMaterial Concrete02 $NucViga -$fcc2 [expr -2.0*$fcc2/$Ec] -$fcu2 -$eu2 0.1 [expr 0.04*$fcc2] [expr 0.04*$fcc2/(2.0*$fcc2/$Ec)]; # Concreto confinado. # Se definen las secciones de los elementos. set ColTag 3 set VigTag 4 62 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 # Áreas de las barras longitudinales. set db8 [expr 8.0*0.0254/8.0]; set barArea8 [expr $db8*$db8*$pi/4.0]; # Dimensiones del núcleo por Mandel y cortante por Caltrans. set doz [list [expr $bcol/2] [expr $bviga/2]]; # Mitad de las secciones. set doy [list [expr $hcol/2] [expr $hviga/2]]; set diz [list 0.07839 0.02605]; # Distancia al borde el concreto confinado. set diy [list 0.07839 0.07605]; # Capacidad de cortante, modelo de Caltrans. set Vn [list 155637.32 79884.06]; set Kst [list 7.296E+08 4.864E+08]; set nFibrasY 8; set nFibrasZ 8; set FibraRec 2; #Elemento columna tag 1. set dozc [lindex $doz 0]; set doyc [lindex $doy 0]; set dizc [lindex $diz 0]; set diyc [lindex $diy 0]; set Vnc [lindex $Vn 0]; set Kstc [lindex $Kst 0]; set RecC 0.06; #Recubrimiento de la sección. section fiberSec 1 { # Se define el núcleo -h/2 -b/2 h/2 b/2 patch rect $NucCol $nFibrasY $nFibrasZ -$diyc -$dizc $diyc $dizc # Se define el recubrimiento. patch rect $cover35 $nFibrasY patch rect $cover35 $nFibrasY patch rect $cover35 $FibraRec patch rect $cover35 $FibraRec $FibraRec $FibraRec $nFibrasZ $nFibrasZ -$doyc -$dozc $doyc -$dizc -$doyc $dizc $doyc $dozc -$doyc -$dizc -$diyc $dizc $diyc -$dizc $doyc $dizc # Se define el acero longitudinal. # Refuerzo superior. set sep1c [expr (2*$doyc-2*$RecC-$db8)/3.0] fiber [expr $doyc-$RecC-$db8/2.0] [expr $barArea8 $AceroTag fiber [expr $doyc-$RecC-$db8/2.0] [expr $barArea8 $AceroTag fiber [expr $doyc-$RecC-$db8/2.0] [expr $barArea8 $AceroTag fiber [expr $doyc-$RecC-$db8/2.0] [expr $barArea8 $AceroTag -$dozc+$RecC+$db8/2.0+0*$sep1c] -$dozc+$RecC+$db8/2.0+1*$sep1c] -$dozc+$RecC+$db8/2.0+2*$sep1c] -$dozc+$RecC+$db8/2.0+3*$sep1c] 63 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 # Refuerzo inferior. fiber [expr -$doyc+$RecC+$db8/2.0] $barArea8 $AceroTag fiber [expr -$doyc+$RecC+$db8/2.0] $barArea8 $AceroTag fiber [expr -$doyc+$RecC+$db8/2.0] $barArea8 $AceroTag fiber [expr -$doyc+$RecC+$db8/2.0] $barArea8 $AceroTag [expr -$dozc+$RecC+$db8/2.0+0*$sep1c] [expr -$dozc+$RecC+$db8/2.0+1*$sep1c] [expr -$dozc+$RecC+$db8/2.0+2*$sep1c] [expr -$dozc+$RecC+$db8/2.0+3*$sep1c] # Refuerzo lateral. fiber [expr -$doyc+$RecC+$db8/2.0+1*$sep1c] [expr -$dozc+$RecC+$db8/2.0] $barArea8 $AceroTag fiber [expr -$doyc+$RecC+$db8/2.0+1*$sep1c] [expr $dozc-$RecC-$db8/2.0] $barArea8 $AceroTag fiber [expr -$doyc+$RecC+$db8/2.0+2*$sep1c] [expr -$dozc+$RecC+$db8/2.0] $barArea8 $AceroTag fiber [expr -$doyc+$RecC+$db8/2.0+2*$sep1c] [expr $dozc-$RecC-$db8/2.0] $barArea8 $AceroTag }; # Se terminó de definir la sección. # Elemento viga tag 2. set dozv [lindex $doz 1]; set doyv [lindex $doy 1]; set dizv [lindex $diz 1]; set diyv [lindex $diy 1]; set Vnv [lindex $Vn 1]; set Kstv [lindex $Kst 1]; set RecV 0.06; #Recubrimiento de la sección. section fiberSec 2 { # Se define el núcleo. -h/2 -b/2 h/2 b/2 patch rect $NucViga $nFibrasY $nFibrasZ -$diyv -$dizv $diyv $dizv # Se define el recubrimiento. patch rect $cover35 $nFibrasY patch rect $cover35 $nFibrasY patch rect $cover35 $FibraRec patch rect $cover35 $FibraRec $FibraRec $FibraRec $nFibrasZ $nFibrasZ -$doyv -$dozv $doyv -$dizv -$doyv $dizv $doyv $dozv -$doyv -$dizv -$diyv $dizv $diyv -$dizv $doyv $dizv # Se define el acero longitudinal # Refuerzo superior. set sep1v [expr (2*$dozv-2*$RecV-$db8)] fiber [expr $doyv-$RecV-$db8/2.0] [expr $barArea8 $AceroTag fiber [expr $doyv-$RecV-$db8/2.0] [expr $barArea8 $AceroTag # Refuerzo inferior. set sep2v [expr (2*$dozv-2*$RecV-$db8)] -$dozv+$RecV+$db8/2.0+0*$sep1v] -$dozv+$RecV+$db8/2.0+1*$sep1v] 64 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 233 234 235 236 237 238 239 240 241 242 243 244 245 246 247 248 249 250 251 252 253 254 255 fiber [expr -$doyv+$RecV+$db8/2.0] [expr -$dozv+$RecV+$db8/2.0+0*$sep2v] $barArea8 $AceroTag fiber [expr -$doyv+$RecV+$db8/2.0] [expr -$dozv+$RecV+$db8/2.0+1*$sep2v] $barArea8 $AceroTag }; # Se terminó de definir la sección. # Se define la relación cortante - deformación. set CortanteCol 6 uniaxialMaterial Steel01 $CortanteCol $Vnc $Kstc 1.0e-3 section Aggregator $ColTag $CortanteCol Vy -section 1 set CortanteVig 7 uniaxialMaterial Steel01 $CortanteVig $Vnv $Kstv 1.0e-3 section Aggregator $VigTag $CortanteVig Vy -section 2 # Se define la transformación geométrica. set Tcorot 1 geomTransf Corotational $Tcorot # Se definen los elementos del modelo. set nPts 5 for {set i 1} {$i <= $Nniveles} {incr i} { set y [expr $i - 1]; for set set set set {set j 1} {$j <= [expr $Ncrujias + 1]} {incr j} { x [expr $j - 1]; c 1; # Tag columnas $i$j$c. v 2; # Tag vigas $i$j$v. t 3; element forceBeamColumn $i$j$c $y$x $i$x $nPts $ColTag $Tcorot if {$j <= $Ncrujias} { element forceBeamColumn $i$j$v $i$x $i$j $nPts $VigTag $Tcorot } }; # Segundo for. }; # Primer for. # Se define la ventana que permitirá visualizar el modelo. recorder display "Marco 3 Niveles" 10 10 600 600 -wipe prp 0 0 50 vup 0 1 0 vpn 0 0 1 display 1 2 10 set ViewScale 5; # Se determina el periodo fundamental de la estructura. set eigenvalues [eigen 1]; set T [expr 2*$pi/($eigenvalues**0.5)]; puts "T1 = $T"; 65 256 257 258 259 260 261 262 263 264 265 266 267 268 269 270 271 272 273 274 275 276 277 278 279 280 281 282 283 284 285 286 287 288 289 290 291 292 293 294 295 296 297 298 299 300 301 302 303 304 305 306 # Se definen las cargas actuantes en la estructura. set Grav 1 pattern Plain $Grav Linear { for {set i 1} {$i <= $Nniveles} {incr i} { for {set j 0} {$j <= $Ncrujias} {incr j} { if {$i == $Nniveles} { if {$j == 0 || $j == $Ncrujias} { if {$j == 0} { load $i$j 0.0 [expr -$wa*$L/2.0] [expr } else { load $i$j 0.0 [expr -$wa*$L/2.0] [expr } } else { load $i$j 0.0 [expr -2*$wa*$L/2.0] 0.0 } } else { if {$j == 0 || $j == $Ncrujias} { if {$j == 0} { load $i$j 0.0 [expr -$we*$L/2.0] [expr } else { load $i$j 0.0 [expr -$we*$L/2.0] [expr } } else { load $i$j 0.0 [expr -2*$we*$L/2.0] 0.0 } }; # Segundo else. }; # Segundo for. }; # Primer for. }; # Patter. -$wa*$L**2/12.0] $wa*$L**2/12.0] -$we*$L**2/12.0] $we*$L**2/12.0] # Se definen los registros. file mkdir $carpeta; # Se crea la carpeta donde se almacenarán los resultados. recorder Node -file $carpeta/DespTop.out -time -node 33 -dof 1 disp; recorder Node -file $carpeta/ReaccionBase.out -time -node 0 1 2 3 -dof 1 2 3 reaction; recorder Drift -file $carpeta/Drift.out -time -iNode 3 13 23 -jNode 13 23 33 -dof 1 -perpDirn 2 ; # Se definen los parámetros del análisis estático. system UmfPack numberer RCM constraints Plain test NormDispIncr 1.0e-5 10 0; integrator LoadControl 0.1 algorithm Newton analysis Static analyze 10 66 307 308 309 310 311 312 313 314 315 316 317 318 319 320 321 322 323 324 325 326 327 328 329 330 331 332 333 334 335 336 loadConst -time 0.0 puts "Análisis estático finalizado." # Se define el amortiguamiento de la estructura. set freq [expr [eigen 1]**0.5] set damp 0.02; rayleigh 0. 0. 0. [expr 2*$damp*$freq] # Se crea el patrón de aceleraciones. set Factor 0.03; # Registro de aceleraciones esta en cm/s2, el factor lo convierte a m/s2 y triplica la intensidad sísmica set dt 0.01; # Diferencial de tiempo del acelerograma. set Npuntos 20000; # Número de puntos del acelerograma. set AccelDataFile "SCT18509.txt"; # Se indica el registro a utilizar. set DirX 1; # Dirección en la que se aplicarán las aceleraciones. set accelSeries "Series -dt $dt -filePath $AccelDataFile -factor $Factor"; pattern UniformExcitation 2 $DirX -accel $accelSeries # Se realiza el análisis dinámico. system UmfPack numberer RCM constraints Plain test NormDispIncr 1.0e-8 10 integrator Newmark 0.5 0.25 algorithm Newton analysis Transient analyze $Npuntos $dt puts "Análisis Dinámico finalizado." 67 8. Análisis dinámico de un marco reforzado con amortiguador viscoso 8.1 Descripción del modelo En este ejemplo se realiza un análisis dinámico a un marco reforzado con un amortiguador viscoso. No se consideran efectos no lineales en trabe y columnas, sólo en el disipador. Este ejemplo se encuentra disponible en la página oficial del OpenSees (OpenSees, 2010). Las unidades del modelo son kN, mm y s. El modelo a analizar, mostrado en la Figura 8.1, consta de un marco de un nivel y una sola crujía, donde L = 5 m y h = 3 m. Se considera una carga actuante sobre el marco de 1,000 KN. Para definir los elementos estructurales se parte de las consideraciones de que la viga es un elemento infinitamente rígido y que el marco posee un periodo fundamental igual a 0.7 s. Basándose en estos datos se determina el momento de inercia de las columnas y se procede a crear los elementos viga y columna correspondiente. El amortiguador viscoso (Elemento 4) posee una rigidez axial 𝐾𝑑 = 25 𝑘𝑁/𝑚𝑚, un coeficiente de amortiguamiento 𝐶𝑑 = 20.74 𝑘𝑁(𝑠/𝑚𝑚)𝛼 y un exponente de velocidad α = 0.35. El marco es sometido a la componente Este-Oeste de movimiento sísmico del terremoto de Michoacán, México, del 19/sept/1985 registrado en la estación SCT (Instituto de Ingeniería, 2018). Para mostrar los efectos de la adición del amortiguador viscoso en la respuesta dinámica del marco, al final del ejemplo se muestran los desplazamientos laterales del marco con y sin amortiguador. 68 3 4 3 1 2 h 4 1 2 L Figura 8.1 Esquema del marco analizado en el ejemplo 8.2 Descripción del código Se comienza a construir el modelo borrando los objetos definidos con anterioridad por medio del comando wipe, (línea 8). Posteriormente, se indican el número de dimensiones del modelo y número de grados de libertad por nodo (línea 9). Entre las líneas 12 a 26 se definen parámetros que facilitan la creación del modelo y su posterior modificación en caso de ser necesario. Entre las líneas 30 a 44 se crean los nodos de la estructura, sus respectivas restricciones y la masa actuante, siendo ésta última distribuida entre las dos conexiones viga – columna de la estructura. Ahora, al conocer la masa y el periodo de la estructura, es posible determinar su rigidez lateral (K) por medio de la ecuación (8.1): 𝑚 𝑇 = 2𝜋√ 𝐾 (8.1) 69 donde: 𝑇 es el periodo de la estructura. 𝑚 es la masa actuante. 𝐾 es la rigidez lateral. En este ejemplo se considera que la viga es un elemento infinitamente rígido. Bajo esta suposición, y para un marco de este tipo, la rigidez lateral de la estructura es igual a (Chopra, 1995): 𝐾= ∑ 𝑐𝑜𝑙𝑢𝑚𝑛𝑎𝑠 12𝐸𝐼𝑐 𝐸𝐼𝑐 = 24 3 3 ℎ ℎ (8.2) donde: 𝐸 es el módulo de elasticidad. 𝐼𝑐 es el momento de inercia de la columna. ℎ es la altura del marco. Como se puede observar en la ecuación (8.2), es posible despejar el momento de inercia de la columna (𝐼𝑐). Dicho valor se utiliza para definir los elementos columna del marco. Si en cambio, la suposición hubiera sido que el elemento viga carece de rigidez, la rigidez lateral del marco podría calcularse con la ecuación (8.3): 𝐾= ∑ 𝑐𝑜𝑙𝑢𝑚𝑛𝑎𝑠 3𝐸𝐼𝑐 𝐸𝐼𝑐 =6 3 3 ℎ ℎ (8.3) Claramente, entre estos dos extremos existen una infinidad de valores de rigidez para la viga del marco. Para esos casos, la rigidez lateral del marco se calcula de la siguiente forma: 70 𝐾= 24𝐸𝐼𝑐 12𝜌 + 1 ℎ3 12𝜌 + 4 (8.4) Donde ρ es la relación de rigidez entre la viga y la columna, que se calcula con la ecuación (8.5): 𝜌= 𝐼𝑏 4𝐼𝑐 (8.5) Siendo 𝐼𝑏 el módulo de inercia de la viga. En la Figura 8.2 se muestra la variación rigidez lateral en función del parámetro ρ. K/( EIc /h 3 ) 24 18 12 6 0 0.001 0.01 0.1 1 10 100 ρ Figura 8.2 Rigidez lateral del marco en función de 𝜌, adaptada de (Chopra, 1995) La definición de las propiedades y posterior creación de los elementos que conforman el marco se realiza entre las líneas 47 a 71. Obsérvese que para modelar el amortiguador viscoso se comenzó definiendo un material con el comando uniaxialMaterial ViscousDamper; el cual representa el comportamiento de un resorte lineal y un amortiguador no lineal en serie. A manera de ejemplo, en la Figura 8.3 se muestra la respuesta típica de un disipador viscoso no lineal. 71 Fuerza axial, kN 100 50 0 -50 -100 -20 -10 0 10 Desplazamiento, mm 20 Figura 8.3 Respuesta típica de un disipador viscoso no lineal Una vez que el material que compondrá al amortiguador viscoso es definido, se procede a crear el elemento por medio del comando element twoNodeLink; el cual construye, en este caso, un elemento de longitud cero con una respuesta axial definida por las propiedades del material ViscousDamper. De las líneas 73 a 81 se definen los archivos de resultados que se desean generar del análisis. Posteriormente, de la línea 84 a 88, se define el amortiguamiento de la estructura, indicando al programa que sólo tome en cuenta la matriz de masa del modelo para determinar el amortiguamiento de Rayleigh. El ejemplo se finaliza realizando el análisis dinámico. Esto ocurre entre las líneas 91 a 117. Para observar los efectos producidos por el amortiguador viscoso en la respuesta dinámica del marco, se realizaron dos análisis, uno del marco sin reforzar y otro del marco reforzado con el amortiguador viscoso. La Figura 8.4 muestra la comparación del registro de desplazamientos del Nodo 4 de los dos análisis realizados. Obsérvese que la adición del amortiguador viscoso mejora el desempeño estructural del marco, lográndose una reducción en la respuesta máxima de más del 60% en comparación con el caso sin refuerzo. Desplazamiento laterla, mm 72 80 60 Sin refuerzo Con refuerzo 40 20 0 -20 -40 -60 -80 0 20 40 60 80 100 Tiempo, s Figura 8.4 Comparación de desplazamientos laterales: marco sin y reforzado con amortiguador viscoso. 8.3 Comandos adicionales empleados Materiales: - uniaxialMaterial ViscousDamper [Etiqueta material] [Rigidez axial Kd] [Coeficiente de amortiguamiento] [Alfa o exponente de velocidad] Elementos: - element twoNodeLink [Etiqueta del elemento] [Nodo i] [Nodo f] [Etiqueta material existente] [Dirección del material] 73 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 #-------------------------------------------------------------------------# Análisis dinámico de un marco reforzado con amortiguador viscoso. # # Problema creado por: Sarven Akcelyan & Dimitrios G. Lignos # Unidades del modelo [KN,mm,s] #-------------------------------------------------------------------------wipe; model BasicBuilder -ndm 2 -ndf 3; # Se crea la carpeta que almacenará los resultados. set Output ResultadosEx6; file mkdir $Output; # Parámetros del marco. set L 5000.; # Ancho de crujía. set h 3000.; # Altura del marco. set W 1000.; # Peso actuante, para definir la masa. set g 9810.; # Gravedad en mm/s2. set m [expr $W/$g]; # Se define la masa actuante. set Tn 0.7; # Periodo de la estructura. set pi [expr acos(-1.0)]; # Propiedades del amortiguador set Kd 25.; # Rigidez axial. set Cd 20.7452; # Coeficiente de amortiguamiento. set ad 0.35; # Exponente a # Se node node node node definen 1 0. 2 $L 3 0. 4 $L los nodos del modelo. 0. ; 0. ; $h ; $h ; # Se definen las condiciones de apoyo. fix 1 1 1 1; fix 2 1 1 1; # Se restringen los nodos de la viga equalDOF 3 4 1 ; # GDL . # Se asignan las masas. mass 3 [expr 0.5*$m] 0. 0. ; mass 4 [expr 0.5*$m] 0. 0. ; # Se definen las propiedades de las columnas y la viga. set K [expr pow(2*$pi/$Tn,2)*$m]; set E 200.0; set Ic [expr $K*pow($h,3)/(24*$E)]; # (K=24EIc/h^3) set Ib [expr 1e12*$Ic]; set A [expr 1e12]; 74 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 # Se define el material ViscousDamper uniaxialMaterial ViscousDamper 1 $Kd $Cd $ad # Se crea la transformada geometrica. set TransfTag 1; geomTransf Linear $TransfTag; # Se definen los elementos. # Columna element elasticBeamColumn 1 1 3 $A $E $Ic $TransfTag; element elasticBeamColumn 2 2 4 $A $E $Ic $TransfTag; # Viga element elasticBeamColumn 3 3 4 $A $E $Ib $TransfTag; # Amortiguador #element twoNodeLink $eleTag $iNode $jNode -mat $matTags -dir $dirs element twoNodeLink 4 1 4 -mat 1 -dir 1 puts "Modelo construido" # Se definen los registros del modelo recorder Node -file $Output/Disp.out -time -node 4 -dof 1 disp; recorder Node -file $Output/Acc.out -time -node 4 -dof 1 accel; recorder Node -file $Output/Base.out -time -node 1 2 -dof 1 reaction; recorder Node -file $Output/NBase.out -time -node 1 2 -dof 2 reaction; recorder recorder recorder recorder Element Element Element Element -file $Output/Damperdisp.out -time -ele 4 deformations ; -file $Output/Damperforce.out -time -ele 4 localForce ; -file $Output/Dampergbforce.out -time -ele 4 -dof 1 force; -file $Output/Frameforce.out -time -ele 1 2 -dof 1 force; # Se define el amortiguamiento de la estructura. set freq [expr ([eigen -fullGenLapack 1])**0.5] set period [expr 2*$pi/$freq] puts "T = $period" set damp 0.02; rayleigh [expr 2*$damp*$freq] 0. 0. 0. # Se crea el patrón de aceleraciones. set Factor 10.0; # El registro de aceleraciones se encuentra en cm/s2, este factor lo convierte a mm/s2. set dt 0.01; # Diferencial de tiempo del acelerograma. set Npuntos 15000; # Número de puntos del acelerograma. set AccelDataFile "SCT18509.txt"; # Se indica el registro a utilizar. set DirX 1; # Dirección en la que se aplicarán las aceleraciones. set accelSeries "Series -dt $dt -filePath $AccelDataFile -factor $Factor"; pattern UniformExcitation 1 $DirX -accel $accelSeries # Se define la ventana que permitirá visualizar el modelo. recorder display "Marco con VD" 10 10 500 500 -wipe 75 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 prp 200. 50. 1; vup 0 1 0; vpn 0 0 1; display 1 5 40 # Se crea el análisis dinámico. wipeAnalysis; constraints Transformation; numberer RCM; system UmfPack; test EnergyIncr 1.0e-10 100; algorithm KrylovNewton; integrator Newmark 0.5 0.25 ; analysis Transient; analyze $Npuntos $dt; puts "Análisis dinámico finalizado" 77 9. Análisis dinámico de un marco reforzado con un contraventeo restringido al pandeo 9.1 Descripción del modelo En este ejemplo se realiza un análisis dinámico a un marco reforzado con un contraventeo restringido al pandeo (CRP). Los CPR son dispositivos que disipan energía sísmica por medio de comportamiento plástico de su núcleo, por lo que durante este análisis se considerarán efectos no lineales en el CRP. Información adicional sobre los CRP se puede encontrar en (Merrit, et al., 2003), (Black, et al., 2004), (Tremblay, et al., 2006), (TeranGilmore & Virto, 2009), (Guerrero, et al., 2017), entre otros. Este ejemplo se basa en el ejemplo del Capítulo 7, sólo se ha sustituido el disipador viscoso por un CRP. Las unidades del modelo son kN, mm y s. El modelo consta de un marco de un nivel (de 3 m de altura) y una crujía (de 5 m de ancho). Se considera una carga actuante sobre el marco de 1,000 KN. Al igual que en el Capítulo 7, para definir los elementos estructurales se parte de la suposición de que la viga es un elemento infinitamente rígido y el marco posee un periodo fundamental igual a 0.7 s. Basándose en estos datos se determina el momento de inercia de las columnas y se procede a crear los elementos viga y columna correspondientes. El material que conforma al núcleo del CRP es acero ASTM A36 (𝑓𝑦 = 250 𝑀𝑃𝑎). En la Figura 9.1 se muestra un diagrama del dispositivo empleado en este ejemplo. Como se puede apreciar, los CRPs cuentan con dos diferentes secciones transversales. En los extremos se encuentran las secciones elásticas que actúan como conexiones. El área transversal de estas secciones es mayor que el área central del núcleo para garantizar que siempre trabajen en su intervalo elástico. La relación entre el área del núcleo y el área de las conexiones es de 1 a 4 para este ejemplo. Esto significa que las conexiones del CPR tendrán 78 un área transversal cuatro veces más grande que el área de su núcleo. De la misma figura se observa que, en este ejemplo, la longitud del núcleo será igual a un tercio de la longitud total del disipador. Para definir las conexiones del CRP con el marco se definen dos nodos adicionales; los cuales se considerarán articulados. Sección elástica Núcleo con compor(A = 4 Anúcleo ) B tamiento inelástico Carcasa rellena de mortero Carcasa Núcleo Mortero Material antiadherente B’ L/3 L/3 Corte B – B´ L/3 Figura 9.1 Esquema de un contravente restringido al pandeo Al igual que en el Capítulo 7, el marco de será sometido al registro sísmico SCT 19/Sep/1985 (Instituto de Ingeniería, 2018). El marco analizado en este ejemplo se muestra en la Figura 9.2. 3 4 3 24 43 23 1 1 21 42 22 h 2 41 2 L Figura 9.2 Esquema del marco analizado en el ejemplo 79 9.2 Descripción del código Se comienza a construir el modelo borrando los objetos definidos con anterioridad por medio del comando wipe (línea 8). Posteriormente, se indican el número de dimensiones del modelo y número de grados de libertad por nodo (línea 9). Entre las líneas 12 a 28 se definen los valores que facilitarán la creación del modelo y su posterior modificación en caso de ser necesario. Entre estos valores también se define la relación de áreas y longitudes del CRP, además del área transversal de su núcleo, en cm2. Entre las líneas 31 a 48 se crean los nodos de la estructura, sus respectivas restricciones y la masa actuante, siendo ésta última distribuida entre las dos conexiones viga – columna de la estructura. Debido a que el CRP se conforma por dos diferentes secciones transversales, es necesario crear dos nodos adicionales a lo largo del elemento los cuales definen donde inician y terminan las secciones elásticas del disipador. Adicionalmente se crean dos nodos en las mismas coordenadas que los nodos 1 y 4. Éstos son los nodos 21 y 24. Los desplazamientos laterales y verticales de los nodos 1 y 21, y 4 y 24 son vinculados para modelar una conexión articulada entre el marco y el CRP (líneas 47 y 48). Nótese que sólo los grados de libertad 1 y 2 son vinculados mientras que la rotación (grado de libertad 3) no se vincula. En este ejemplo es necesario definir el material que compone al núcleo del disipador. Como se mencionó antes, el esfuerzo de fluencia del acero es 𝑓𝑦 = 250 𝑀𝑃𝑎. Entre las líneas 55 a 58 se crea el material del disipador con los comandos uniaxialMaterial Steel02 y uniaxialMaterial MinMax. Entre las líneas 61 a 65 se definen las propiedades de las columnas y la viga del marco. Para modelar el CRP es necesario construir las secciones transversales de las conexiones y del núcleo. Esto ocurre entre las líneas 68 a 87. Los elementos que conforman el modelo se crean entre las líneas 96 a 106. Obsérvese que se utilizan elementos elasticBeamColumn para las columnas y la viga, mientras que para crear el núcleo y las conexiones del CRP se utilizan elementos forceBeamColumn. Este último tipo de elemento considera comportamiento inelástico. 80 Una vez que el modelo ha sido construido se procede a definir los diferentes archivos de resultados que se generarán durante el análisis. Esto ocurre entre las líneas 111 y 124. Por último, se define el amortiguamiento de la estructura (líneas 127 a 131), se genera el pattern de la solicitación sísmica (líneas 134 a 142), se genera la ventana con la representación gráfica del modelo (líneas 145 a 149) y se realiza el análisis dinámico (líneas 152 a 160). En la Figura 9.3 se comparan los desplazamientos del Nodo 4 de la estructura reforzada con el CRP y sin reforzar. Se puede ver que el CRP reduce significativamente la respuesta sísmica de la estructura analizada. Desplazamiento lateral, mm 80 Sin refuerzo Con refuerzo 60 40 20 0 -20 -40 -60 -80 0 20 40 60 Tiempo, s 80 100 Figura 9.3 Comparación de desplazamientos laterales: marco sin refuerzo y reforzado con CRP Adicionalmente, la curva fuerza axial – desplazamiento del CRP utilizado en este ejemplo se muestra en la Figura 9.4. Se aprecia que el CRP fluye tanto a tensión como a compresión, lo cual le brinda ciclos histeréticos estables. En el siguiente ejemplo se analizará un marco reforzado con un contraventeo convencional, es decir, uno no restringido al pandeo. En ese ejemplo, se observará que el contraventeo convencional presenta una menor resistencia a compresión que a tensión, esto último debido a que se considerará el problema del pandeo lateral. Fuerza axial, kN 81 40 30 20 10 0 -10 -20 -30 -40 -10 -5 0 5 10 Desplazamiento, mm Figura 9.4 Respuesta del contraventeo restringido al pandeo 82 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 #-------------------------------------------------------------------------# Análisis dinámico de un marco reforzado con contraventeo restringido al pandeo. # # Ejemplo basado en el problema creado por Sarven Akcelyan & Dimitrios G. Lignos. # Unidades del modelo [KN,mm,s] #-------------------------------------------------------------------------- wipe; model BasicBuilder -ndm 2 -ndf 3; # Se crea la carpeta que almacenará los resultados. set Output ResultadosEx7; file mkdir $Output; # Parámetros del marco. set L 5000.; # set h 3000.; # set W 1000.; # set g 9810.; # set m [expr $W/$g]; # set Tn 0.7; # set pi [expr acos(-1.0)]; Ancho de crujía. Altura del marco. Peso actuante, para definir la masa. Gravedad en mm/s2. Se define la masa actuante. Periodo de la estructura. # Propiedades del contraventeo restringido. set Lratio [expr 1.0/3.0]; # Relación longitud núcleo / longitud total del disipador < 1.0 set Aratio 0.25; # Relación área del núcleo / área conexiones set fa [expr 1.0]; # Área del núcleo del disipador, en cm2. # Se node node node node definen 1 0. 2 $L 3 0. 4 $L los nodos del modelo. 0. ; 0. ; $h -mass [expr 0.5*$m] 0. 0. ; $h -mass [expr 0.5*$m] 0. 0. ; # Se definen las condiciones de apoyo. fix 1 1 1 1; fix 2 1 1 1; # Se node node node node definen los nodos del contraventeo restringido. 21 0.0 0.0 22 [expr $L*(1-$Lratio)/2.0] [expr $h*(1-$Lratio)/2.0] 23 [expr $L*(1+$Lratio)/2.0] [expr $h*(1+$Lratio)/2.0] 24 $L $h # Se crea una articulación en los nodos que conectan con el marco. equalDOF 1 21 1 2; equalDOF 4 24 1 2; # Se define el material del disipador. set steelTagBRBs 1000 83 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 set fyBRB 0.25; set EsBRB 200.0; uniaxialMaterial Steel02 [expr $steelTagBRBs+1] $fyBRB $EsBRB 0.02 25.0 0.925 0.15 0.05 1.0 0.05 1.0 0.0; uniaxialMaterial MinMax $steelTagBRBs [expr $steelTagBRBs+1] -min 0.20 -max 0.20 # Se definen las propiedades de las columnas y la viga. set K [expr pow(2*$pi/$Tn,2)*$m]; set E 200.0; set Ic [expr $K*pow($h,3)/(24*$E)]; # (K=24EIc/h^3) set Ib [expr 1e12*$Ic]; set A [expr 1e12]; # Se crean las secciones que conforman el disipador. set BRBsec 1001; set BRBend 1002; set set set set secFactorBRB [expr $fa*(1e2)]; secFactorEND [expr (1.0/$Aratio)*$fa*(1e2)]; by [expr ($secFactorBRB)**0.5]; byEND [expr ($secFactorEND)**0.5]; # Área del núcleo en mm2. # Áreas conexiones en mm2. # Se define la sección del núcleo del disipador. set nFibers 6; section fiberSec $BRBsec { patch rect $steelTagBRBs $nFibers $nFibers [expr -1.*$by/2.] [expr 1.*$by/2.] [expr $by/2.] [expr $by/2.] } # Se define la sección de las conexiones del disipador. section fiberSec $BRBend { patch rect $steelTagBRBs $nFibers $nFibers [expr -1.*$byEND/2.] [expr 1.*$byEND/2.] [expr $byEND/2.] [expr $byEND/2.] } # Se crea la transformada geométrica. set TransfTag 1; geomTransf Linear $TransfTag ; # Se definen los elementos. set nIP 3; # Columna. element elasticBeamColumn 1 1 3 $A $E $Ic $TransfTag; element elasticBeamColumn 2 2 4 $A $E $Ic $TransfTag; # Viga. element elasticBeamColumn 3 3 4 $A $E $Ib $TransfTag; 84 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 # Contraventeo restringido. element forceBeamColumn 41 21 22 $nIP $BRBend $TransfTag element forceBeamColumn 42 22 23 $nIP $BRBsec $TransfTag element forceBeamColumn 43 23 24 $nIP $BRBend $TransfTag puts "Modelo construido" # Se definen los registros del marco. recorder Node -file $Output/Disp.out -time -node 4 -dof 1 disp; recorder Node -file $Output/Acc.out -time -node 4 -dof 1 accel; recorder Node -file $Output/Base.out -time -node 1 2 -dof 1 reaction; recorder Node -file $Output/NBase.out -time -node 1 2 -dof 2 reaction; recorder Element -file $Output/Frameforce.out -time -ele 1 2 -dof 1 force; # Se definen los registros del contraventeo restringido al pandeo. recorder Node -file $Output/ReactionsDOF1BRBs.out -node 21 -dof 1 reaction; recorder Node -file $Output/ReactionsDOF2BRBs.out -node 21 -dof 2 reaction; recorder Node -file $Output/ReactionsDOF3BRBs.out -node 21 -dof 3 reaction; recorder Element -xml "$Output/BRB_basicForce.out" -time -ele 41 42 43 basicForce recorder Element -xml "$Output/BRB_basicDef.out" -time -ele 41 42 43 basicDeformation # Se define el amortiguamiento de la estructura. set freq [expr [eigen -fullGenLapack 1]**0.5] set period [expr 2*$pi/$freq] puts "T = $period" set damp 0.02; rayleigh 0. 0. 0. [expr 2*$damp*$freq] # Se crea el patrón de aceleraciones. set Factor 10; # El registro de aceleraciones se encuentra en cm/s2, este factor lo convierte a mm/s2. set dt 0.01; # Diferencial de tiempo del acelerograma. set Npuntos 15000; # Número de puntos del acelerograma. set AccelDataFile "SCT18509.txt"; # Se indica el registro a utilizar. set DirX 1; # Dirección en la que se aplicarán las aceleraciones. timeSeries Path 1 -dt $dt -filePath $AccelDataFile -factor $Factor; pattern UniformExcitation 1 $DirX -accel 1; # Se define la ventana que permitirá visualizar el modelo. recorder display "Marco con contraventeo restringido" 10 10 500 500 -wipe prp 200. 50. 1; vup 0 1 0; vpn 0 0 1; display 1 5 40 # Se crea el análisis dinámico. wipeAnalysis; constraints Transformation; 85 154 155 156 157 158 159 160 161 162 numberer RCM; system UmfPack; test EnergyIncr 1.0e-10 100; algorithm KrylovNewton; integrator Newmark 0.5 0.25 ; analysis Transient; analyze $Npuntos $dt; puts "Análisis dinámico finalizado" 87 10. Análisis dinámico de un marco reforzado con un contraventeo convencional 10.1 Descripción del modelo Se realiza un análisis dinámico a un marco reforzado con un contraventeo convencional (Figura 10.1). Debido a que los contraventeos convencionales tienden a presentar problemas de inestabilidad al ser sometidos a cargas de compresión, durante este análisis se considerarán efectos no lineales. Este ejemplo se basa en aquel del Capítulo 7. Las unidades del modelo son kN, mm y s. 3 4 3 42 23 22 21 h 2 1 41 1 2 L Figura 10.1 Esquema del marco analizado en el ejemplo Como se observa en la Figura 10.1, modelo a analizar consta de un marco de un nivel y una sola crujía. El ancho de la crujía es de 5 m y el alto de 3 m. Se considera una carga actuante sobre el marco de 1,000 KN. Para definir los elementos estructurales se parte de la suposición de que la viga es un elemento infinitamente rígido. Se considera que el marco 88 tiene un periodo fundamental igual a 1.5 s. Basándose en estos datos se determina el momento de inercia de las columnas. El contraventeo está conformado por un elemento con sección en cajón de 10 cm por lado y un espesor de placa de 3 mm. El material que conformará el contraventeo es acero A572 Gr. 50 con un esfuerzo de fluencia 𝑓𝑦 = 345 𝑀𝑃𝑎. Siguiendo las recomendaciones presentadas en la referencia (Tapia, et al., 2016), para reproducir los efectos de inestabilidad producidos por cargas de compresión, se considera un pandeo inicial en el elemento con una flecha igual a 0.008𝐿𝑐 , donde 𝐿𝑐 es la longitud del contraventeo. El marco de será sometido al registro sísmico SCT 19/sep/1985 (Instituto de Ingeniería, 2018). 10.2 Descripción del código Se comienza a construir el modelo borrando los objetos definidos con anterioridad por medio del comando wipe (línea 8). Posteriormente se indican el número de dimensiones del modelo y número de grados de libertad por nodo (línea 9). Entre las líneas 12 a 28 se definen los valores que facilitarán la creación del modelo y su posterior modificación en caso de ser necesario. Entre estos valores también se define el área transversal del contraventeo, su longitud y su flecha inicial. Entre las líneas 31 a 47 se crean los nodos de la estructura, sus respectivas restricciones y la masa actuante, siendo ésta última distribuida entre las dos conexiones viga – columna de la estructura. Para modelar una imperfección geométrica en el contraventeo se crea un nodo intermedio en el elemento. Dicho nodo tendrá una posición que considere el pandeo inicial recomendado por la referencia (Tapia, et al., 2016). En la Figura 10.2 muestra una representación del nodo intermedio, además se indican los ángulos alfa y beta definidos en las líneas 26 y 27, respectivamente. Adicionalmente, se crean dos nodos en las mismas coordenadas que los nodos 1 y 4. Los desplazamientos laterales y verticales de los nodos creados (41 y 43) son vinculados para modelar una conexión articulada entre el marco y el contraventeo (líneas 46 y 47). 89 En este ejemplo es necesario definir el material que conforma el contraventeo. Se utiliza un acero con un esfuerzo de fluencia 𝑓𝑦 = 345 𝑀𝑃𝑎. Entre las líneas 50 a 57 se crea el material del disipador por medio de los comandos uniaxialMaterial Steel02, uniaxialMaterial MinMax y uniaxialMaterial Fatigue. El último material empleado se utiliza para considerar el daño acumulado (o fatiga) en el contraventeo debido a los ciclos de carga. 3 0.008Lc 100 100 22 β α Lc Sección transversal del CPR Figura 10.2 Posición del Nodo 22 considerando pandeo inicial del contraventeo (cotas de la sección en mm) Entre las líneas 60 a 64 se definen las propiedades de las columnas y la viga del marco. Por simplicidad en la modelación de este ejemplo, se decidió considerar un contraventeo con una sección transversal en cajón cuadrada uniforme a todo lo largo del elemento. La creación de dicha sección transversal se realiza entre las líneas 70 a 76. Los elementos que conforman el modelo se crean entre las líneas 89 a 97. Obsérvese que se utilizan elementos elasticBeamColumn para las columnas y la viga, mientras que para crear el contraventeo se utilizan elementos forceBeamColumn. Siguiendo las recomendaciones de la referencia [12], se utiliza una transformada geométrica corrotacional para el contraventeo y se le indica al programa que considere ocho subdivisiones en el elemento. Una vez que el modelo ha sido construido se definen los diferentes archivos de resultados que se generarán durante el análisis, esto ocurre entre las líneas 102 y 115. Por último, se define el amortiguamiento de la estructura (líneas 118 a 122), se genera el pattern de la solicitación sísmica (líneas 125 a 133), se genera la ventana con la 90 representación gráfica del modelo (líneas 136 a 140) y se realiza el análisis dinámico (líneas 143 a 151). Para fines comparativos, en la Figura 10.3 se muestran los registros de desplazamientos del Nodo 4 de la estructura reforzada con el contraventeo y sin él. Se aprecia que el contraventeo ayuda a reducir la respuesta de la estructura. Desplazamiento laterla, mm 400 Sin refuerzo Con refuerzo 300 200 100 0 -100 -200 -300 -400 0 20 40 60 Tiempo, s 80 100 Figura 10.3 Comparación de desplazamientos laterales del marco con y sin refuerzo con contraventeo convencional. De manera adicional, en la Figura 10.4 se muestra la gráfica fuerza axial – desplazamiento del contraventeo convencional. Se puede observar que, debido a que en este análisis se considera el fenómeno del pandeo lateral, el elemento no solo tiene menos capacidad a compresión sino que además su curva presenta ciclos histeréticos inestables. 91 500 Fuerza axial, kN 400 300 200 100 0 -100 -100 -50 0 50 Desplazamiento, mm 100 Figura 10.4 Respuesta del contraventeo convencional 10.3 Comandos adicionales empleados Materiales: - uniaxialMaterial Fatigue [Etiqueta material] [Etiqueta material existente] 92 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 #-------------------------------------------------------------------------# Análisis dinámico de un marco reforzado con un contraventeo convencional. # # Ejemplo basado en el problema creado por Sarven Akcelyan & Dimitrios G. Lignos. # Unidades del modelo [KN,mm,s] #-------------------------------------------------------------------------wipe; model BasicBuilder -ndm 2 -ndf 3; # Se crea la carpeta que almacenará los resultados. set Output ResultadosEx8; file mkdir $Output; # Parámetros del marco. set L 5000.; # set h 3000.; # set W 10000.; # set g 9810.; # set m [expr $W/$g]; # set Tn 2.0; # set pi [expr acos(-1.0)]; Ancho de crujía. Altura del marco. Peso actuante, para definir la masa. Gravedad en mm/s2. Se define la masa actuante. Periodo de la estructura. # Propiedades del contraventeo convencional. set Lc [expr ($L**2+$h**2)**0.5]; # Longitud contraventeo convencional. set alfa [expr atan($h/$L)]; # Ángulo de la diagonal. set beta [expr $pi/2.0 - $alfa]; # Ángulo complementario. set pandeo [expr 0.008*$Lc]; # Pandeo inicial. # Se node node node node definen 1 0. 2 $L 3 0. 4 $L los nodos del modelo. 0. ; 0. ; $h -mass [expr 0.5*$m] 0.01 0. ; $h -mass [expr 0.5*$m] 0.01 0. ; # Se definen las condiciones de apoyo. fix 1 1 1 1; fix 2 1 1 1; # Se node node node definen los nodos del contraventeo convencional. 21 0.0 0.0 22 [expr $L/2.0-$pandeo*cos($beta)] [expr $h/2.0+$pandeo*sin($beta)] 23 $L $h # Se crea una articulación en los nodos que conectan con el marco. equalDOF 1 21 1 2; equalDOF 4 23 1 2; # Se define el material del contraventeo. set steelTag 1000 set fy 0.345; 93 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 set Es 200.0; uniaxialMaterial Steel02 [expr $steelTag+1] $fy $Es 0.003 25.0 0.925 0.15 0.05 1.0 0.05 1.0 0.0; uniaxialMaterial MinMax [expr $steelTag+2] [expr $steelTag+1] -min 0.05 -max 0.05 uniaxialMaterial Fatigue $steelTag [expr $steelTag+2] # Se definen las propiedades de las columnas y la viga. set K [expr pow(2*$pi/$Tn,2)*$m]; set E 200.0; set Ic [expr $K*pow($h,3)/(24*$E)]; # (K=24EIc/h^3) set Ib [expr 1.0e6*$Ic]; set A [expr 1.0e6]; # Se crean las secciones que conforman el contraventeo. set Contraventeo 1001; # Se define la sección del núcleo del contraventeo. set nFibers 6; section fiberSec $Contraventeo { patch rect $steelTag 10 4 -50.00 -50.00 patch rect $steelTag 4 10 -47.00 47.00 patch rect $steelTag 10 4 -50.00 47.00 patch rect $steelTag 4 10 -47.00 -50.00 } -47.00 47.00 50.00 47.00 50.00 50.00 50.00 -47.00 # Se crea la transformada geométrica. set TransfLin 1; set TransfCor 2; geomTransf Linear $TransfLin; geomTransf Corotational $TransfCor; # Se definen los elementos. set nPC 8; # Columna. element elasticBeamColumn 1 1 3 $A $E $Ic $TransfLin; element elasticBeamColumn 2 2 4 $A $E $Ic $TransfLin; # Viga. element elasticBeamColumn 3 3 4 $A $E $Ib $TransfLin; # Contraventeo convencional. element forceBeamColumn 41 21 22 $nPC $Contraventeo $TransfCor; element forceBeamColumn 42 22 23 $nPC $Contraventeo $TransfCor; puts "Modelo construido" # Se definen los registros del marco. recorder Node -file $Output/Disp.out -time -node 4 -dof 1 disp; 94 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 recorder recorder recorder recorder Node -file $Output/Acc.out -time -node 4 -dof 1 accel; Node -file $Output/Base.out -time -node 1 2 -dof 1 reaction; Node -file $Output/NBase.out -time -node 1 2 -dof 2 reaction; Element -file $Output/Frameforce.out -time -ele 1 2 -dof 1 force; # Se definen los registros del contraventeo. recorder Node -file $Output/ReactionsDOF1Conts.out -node 21 -dof 1 reaction; recorder Node -file $Output/ReactionsDOF2Conts.out -node 21 -dof 2 reaction; recorder Node -file $Output/ReactionsDOF3Conts.out -node 21 -dof 3 reaction; recorder Element -xml "$Output/Cont_basicForce.out" -time -ele 41 42 basicForce recorder Element -xml "$Output/Cont_basicDef.out" -time -ele 41 42 basicDeformation # Se define el amortiguamiento de la estructura. set freq [expr [eigen 1]**0.5] set period [expr 2.0*$pi/$freq] puts "T = $period" set damp 0.02; rayleigh 0. 0. 0. [expr 2*$damp*$freq] # Se crea el patrón de aceleraciones. set Factor [expr 10.0]; # El registro de aceleraciones se encuentra en cm/s2, este factor lo convierte a mm/s2. set dt 0.01; # Diferencial de tiempo del acelerograma. set Npuntos 15000; # Número de puntos del acelerograma. set AccelDataFile "SCT18509.txt"; # Se indica el registro a utilizar. set DirX 1; # Dirección en la que se aplicarán las aceleraciones. timeSeries Path 1 -dt $dt -filePath $AccelDataFile -factor $Factor; pattern UniformExcitation 1 $DirX -accel 1; # Se define la ventana que permitirá visualizar el modelo. recorder display "Marco con contraventeo convencional" 10 10 500 500 -wipe prp 200. 50. 1; vup 0 1 0; vpn 0 0 1; display 1 5 10 # Se crea el análisis dinámico. wipeAnalysis; constraints Transformation; numberer RCM; system UmfPack; test EnergyIncr 1.0e-10 100; algorithm KrylovNewton; integrator Newmark 0.5 0.25 ; analysis Transient; analyze $Npuntos $dt; puts "Análisis dinámico finalizado" 95 11. Análisis dinámico incremental (ADI) 11.1 Descripción del modelo Se muestra una de las principales ventajas que tiene OpenSees: la posibilidad de realizar una gran cantidad de análisis a la misma estructura con unas pocas líneas de código. El código que se desarrolla permite al usuario realizar varios análisis dinámicos incrementales. En este tipo de análisis, una estructura es sometida a múltiples registros sísmicos; los cuales tienen una intensidad determinada que puede ser incrementada sucesivamente. Por medio de los incrementos sucesivos de la intensidad sísmica, es posible trazar, por ejemplo, curvas de fragilidad de una estructura dada. Una curva de fragilidad muestra la probabilidad que la estructura estudiada tenga una falla en función de la intensidad sísmica. Se aclara que el código aquí presentado sólo ilustra una manera posible (de varias) de realizar análisis dinámico incremental (ADI), propuesto originalmengte por Vamvatsikos y Cornell (Vamvatsikos & Cornell, 2002). 11.2 Descripción del código Antes de comenzar con el ciclo for que permitirá realizar el análisis dinámico incremental es necesario definir una serie de variables relacionadas con el almacenamiento de resultados, los datos de los registros sísmicos y algunos parámetros de los análisis dinámicos. El primer paso es indicar al programa las direcciones de las carpetas que contienen el modelo a analizar y dónde los datos obtenidos serán almacenados. Esto ocurre entre las líneas 6 a 11. 96 De manera posterior se definen el número de registros y una serie de listas que contendrán los nombres de los archivos que contienen los registros, sus diferenciales de tiempo y el número de puntos que contiene cada uno. Dichos valores y listas se definen de la línea 15 a la 23. Por último, es necesario definir el número de intensidades a utilizar y dos listas adicionales, una con los factores de escala que darán lugar a las diferentes intensidades sísmicas a evaluar y otra con el amortiguamiento que se utilizará para cada intensidad sísmica. Esto último sólo si se desea variar el amortiguamiento con la intensidad. Para realizar el análisis dinámico incremental se utilizan dos ciclos for para llamar a cada uno de los datos de las listas antes mencionadas y así crear las carpetas donde se guardarán los resultados y realizar los análisis correspondientes. La Figura 11.1 se muestra el diagrama de flujo del ciclo utilizado en este ejemplo para realizar el análisis dinámico incremental. 97 i=0 No i <= N registros No Si Definir registro i Cont = 1 Si Cont = 1 No i=i+1 Si j <= N intensidades Definir intensidad y análisis j Realizar análisis Terminar ciclo Almacenar datos j=j+1 No ¿Hay fallo? Si Cont = 0 Figura 11.1 Diagrama de flujo del código utilizado para realizar el análisis dinámico incremental 98 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 #-------------------------------------------------------------------------# Análisis Dinámico Incremental (IDA). # Unidades del modelo: Sin unidades. #-------------------------------------------------------------------------set dir "IDA"; set Resultados "Resultados"; set Carpetas [list "SCT"]; # En esta variables se indica la dirección del modelo a analizar. Utilizar "/" para indicar la ruta. # En esta variable se indica la dirección donde se guardaran los resultados. # Lista con los nombres de las carpetas donde se almacenarán los resultados de los análisis, una carpeta por registro sísmico. set nRegistros 1; # Se da el número de registros sísmicos a utilizar. set Registros [list "SCT18509.txt"]; # Se crea una lista con los nombres de los archivos de los registros de aceleraciones. set dts [list 0.01]; # Lista con los diferenciales de tiempo de los registros de aceleraciones, respetando el orden dado en la lista files. set nPuntos [list 15000]; # Se crea una lista con el número de puntos que tiene cada registro de aceleraciones. set nFactores 10; # Se indica el número de intensidades sísmicas que se considerarán en el análisis. set factores [list 0.25 0.5 0.75 1.0 1.25 1.5 1.75 2.0 2.25 2.5]; # Se crea una lista de los factores con los que se escalarán los registros de aceleraciones para obtener las intensidades sísmicas deseadas. Ingresar factores de menor a mayor intensidad sísmica. set dampings [list 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.10 0.10]; # Se crea una lista con los porcentajes de amortiguamiento que se considerará para cada intensidad sísmica. for {set ir 0} {$ir <= [expr $nRegistros-1]} {incr ir} { # Este ciclo "for" llama los datos del registro de aceleraciones empleado en el análisis. set AccelDataFile [lindex $Registros $ir]; # Se llama al primer registro de aceleraciones y se almacena en la variable "AccelDataFile". Esta variable deberá utilizarse en el archivo del análisis dinámico para indicar qué registro de aceleraciones usar en el análisis. set dt [lindex $dts $ir]; # Se llama el diferencial de tiempo del registro. set Npuntos [lindex $nPuntos $ir]; # Se llama el número de puntos del registro. set cont 1; # Esta variable funciona como un fusil, mientras su valor sea igual a 1, OpenSees realizará el análisis dinámico con el registro actual, 99 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 al finalizar incrementará la intensidad sísmica y volverá a analizar el modelo con el mismo registro pero con una mayor intensidad sísmica. # Este ciclo continuará hasta que finalice con todas las intensidades deseadas o el modelo falle durante un análisis, en cuyo caso no será necesario seguir incrementando las intensidades sísmicas. for {set jf 0} {$jf <= [expr $nFactores-1]} {incr jf} { # Este ciclo "for" llama los datos correspondientes a la intensidad sísmica empleada en el análisis. if {$cont == 1} { set Carpeta "[lindex $Carpetas $ir]"; # Se llama el nombre de la carpeta designada para guardar los resultados obtenidos del registro de aceleraciones actual. set Intensidad "[lindex $factores $jf]"; # Se crea carpeta cuyo nombre es el mismo al de la intensidad sísmica actual. set pgaFactor [lindex $factores $jf]; # Se llama el valor para escalar el registro de aceleraciones y obtener la intensidad sísmica deseada en este análisis. set damp [lindex $dampings $jf]; # Se llama el valor del amortiguamiento correspondiente a la intensidad sísmica empleada en el análisis actual. file mkdir $dir/$Resultados/$Carpeta/$Intensidad; las carpetas para guardar los resultados obtenidos. puts puts puts puts $factores $jf]"; # Se crean "$dir/$Resultados/$Carpeta/$Intensidad"; "Modelo: MarcoConcreto"; "Procesando... "; "Secuencia: [lindex $Carpetas $ir]; pgaFactor: [lindex source E8_MarcoCV.tcl; # Se llama el modelo a analizar. set t [getTime]; puts "Análisis Dinámico Finalizado. Tiempo: $t"; if {$t < [expr 0.9*$dt*$Npuntos]} { set cont 0; # Si el análisis falla durante el análisis, la variable "cont" se redefinirá con un valor igual a 0. Esto finalizará con el primer ciclo "for" y se procederá a analizar el modelo con el siguiente registro de aceleraciones. } } } } 101 12. Conclusiones Los ejemplos mostrados en este libro dan a los lectores los conocimientos básicos para analizar estructuras por medio del programa OpenSees. Sin embargo, la información aquí brindada no garantiza un correcto manejo del programa. Como se observó a lo largo de este libro, la estructura de OpenSees permite a los usuarios poseer un profundo control sobre los parámetros de los análisis que se realizan. Esta característica es de gran ayuda para los investigadores, lamentablemente, también representa un inconveniente para los usuarios con menor experiencia en el área de estructuras. Por lo anterior, se recomienda a los usuarios del programa estar muy bien informados sobre los procesos mecánicos que toman lugar en la estructura analizada, de tal manera que puedan tomarlos en cuenta y así garantizar que sus modelos proporcionan resultados confiables. 103 Referencias Bell, J. “Viewpoint Projections and Specifications.” Último acceso enero 2019. https://www.cs.uic.edu/~jbell/CourseNotes/ComputerGraphics/Projections_Viewpoints. html. Black, C. J., Makris, N., y Aiken, ID. "Component testing, seismic evaluation and characterization of buckling-restrained braces." Journal of Structural Engineering - ASCE 130 (2004): 880–894. California Department of Transportation. “Seismic desing criteria.” Publicaciones técnicas del estado de California, 2013. Chopra, A. Dynamics of Structures. Theory and application to earthquake engineering. New Jersey: Prentice - Hall, 1995. Guerrero-Bobadilla, H., Ji, T., y Escobar-Sanchez, J. A. "Experimental studies of a steel frame model with and without buckling-restrained braces." Ingeniería Sísmica 95, 2017, 33-52. Instituto de Ingeniería. Red Acelerográfica del Instituto de Ingeniería. México: Universidad Nacional Autónoma de México, 2018. Mackenna, F. “Object-Oriented Finite Element Programming: Frameworks for Analysis, Algorithms and Parallel Computing.” PhD diss. Universidad de California, 1997. Merrit, S., Uang, C-M., y Benzoni, G. Subassemblage testing of Corebrace BucklingRestrained Braces. La Jolla, California: University of California, San Diego, 2003. OpenSees. “Command Manual.” 2019. Último acceso http://opensees.berkeley.edu/wiki/index.php/Command_Manual. febrero 2019. Pacific Earthquake Engineering Research Center. “OpenSees Navigator.” 2015. Universidad de California, Berkeley. Último acceso enero 2019. http://openseesnavigator.berkeley.edu. Pacific Earthquake Engineering Research Center. “OpenSees. Open source finite element platform for earthquake engineering simulations.” 2006. Universidad de California, Berkeley.Último acceso febrero 2019 http://opensees.berkeley.edu/index.php. Papanikolaou, V. K,, Kartalis-Kaounis, T., Protopapadaki, V. K., y Papadopoulos, T. “GiD+OpenSees Interface: An integrated Finite Element Analysis Platform.” 2017. Aristotle University of Thessaloniki. Último acceso enero del 2019. http://gidopensees.rclab.civil.auth.gr. Priestley, R., Mander, J., y Park R. “Theorical stress - strain model for confined concrete.” Journal of Structural Engineering 114 (1988): 1804-1825. Shojaie, M. “Cyprees Editor, programme for OpenSees.” 2018. Último acceso enero 2019. http://cypress.hrshojaie.com/en-us/default.aspx. Tapia, E., García, J., y Del Rincón, A. “Estudio paramétrico del modelado inelástico de contravientos de acero.” Ingeniería Sísmica 94 (2016): 49-74. Teran-Gilmore, A., y Virto, N. "Preliminary design of low-rise buildings stiffened with buckling restrained braces by a displacement-based approach." Earthquake Spectra 25 (2009): 185-211. Tremblay, R., Bolduc, P., Neville, R., y DeVall, R. "Seismic testing and performance of buckling-restrained bracing systems." Canadian Journal of Civil Engineering 33 (2006): 183-198. Vamvatsikos, D., y Cornell, C. A. "Incremental dynamic analysis." Earthquake Engineering & Structural Dynamics 31 (2002): 491-514.