Escola Tècnica Superior d’Enginyeria Industrial de Barcelona
Teoria de Màquines i Mecanismes
Exàmens Curs 2018-2019
Lluïsa Jordi Nebot
Joan Puig Ortiz
Enrique Zayas Figueras
Departament d’Enginyeria Mecànica
TEORIA DE MÀQUINES i MECANISMES Curs 2018-2019
–
–
–
–
–
31 d'octubre del 2018
Contingut del sobre: Enunciat, 3 fulls quadriculats i 2 fulls en blanc. No es
repartirà més material.
Per realitzar els dos exercicis es disposa d’una hora i quart.
Pel que fa al material escrit només es pot disposar d’un full A4 manuscrit original.
A l’hora d’entregar introduïu els fulls quadriculats en el sobre.
És pertinent el contingut del document Pautes per a la realització de les proves
escrites i per a l’avaluació que es troba a Atenea.
Exercici 1 [4 punts]
Es desitja millorar el procés d’arrencada d’una atracció de fira per tal que sigui més
confortable per als passatgers, però mantenint les mateixes característiques de
l’atracció. Amb aquesta finalitat, es proposa dissenyar el procés d’arrencada
mitjançant corbes de Bézier de grau mínim.
En el procés d’arrencada, l’atracció ha de passar sense sotragades del repòs a la
velocitat de funcionament wf mentre gira un angle ja = 3 rad en ta = 6 s, i després
manté aquesta velocitat constant durant tf = 2,5 min.
a) Representeu esquemàticament, però de manera pulcra i posant de manifest els
trets més rellevants, la velocitat de rotació w(t) de l’atracció de fira en funció del
temps durant el procés d’arrencada.
b) Determineu les expressions analítiques de l’acceleració i del desplaçament angulars
en el procés d’arrencada. Definiu les variables auxiliars que utilitzeu.
c) Determineu la velocitat de funcionament wf.
d) Determineu el valor de l’acceleració angular màxima amax en el procés d’arrencada.
3
Exercici 2 [6 punts]
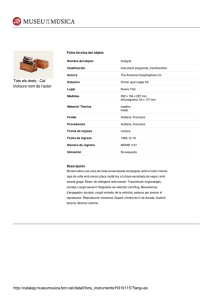
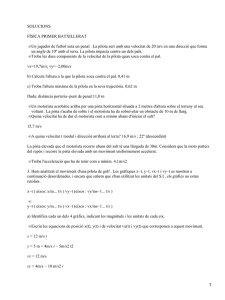
El mecanisme de retorn ràpid de Whitworth es pot esquematitzar tal com es mostra a
la figura. Per al seu estudi, s’utilitza el vector de coordenades generalitzades
q = {j1, j2, j3, s1, s2,}T. Determineu:
a) El nombre de graus de llibertat i la possible existència de redundàncies. Justifiqueu
adequadament les respostes.
b) Les equacions d’enllaç geomètriques i la seva matriu jacobiana Fq.
c) El centre instantani de rotació de la corredora C.
d) L’amplitud d’oscil·lació Dj1 del balancí O1P.
e) La cursa de la corredora C, Ds1, sobre el balancí O1P.
f) Les velocitats j 3 i s2 en els punts morts de j1. Comenteu el resultat obtingut.
4
Solució – Exercici 1
a) Per garantir la continuïtat global de la llei de velocitat angular w(t), cal garantir la
continuïtat en els punts d’unió del tram de repòs amb el tram de velocitat constant i
en l’interior d’aquest tram. Si es desitja realitzar aquest canvi sense sotragades i amb
corbes de Bézier de grau mínim cal imposar continuïtat C1 en cadascun dels punts
d’unió. Això implica utilitzar 2 punts de control alineats amb el tram de repòs i 2
punts alineats amb el tram de velocitat constant. Això fa que la corba de Bézier de
grau mínim per definir el tram de canvi de velocitat sigui de grau 3. La continuïtat
interna queda garantida per la pròpia continuïtat de la corba de Bézier i del tram
recte.
ω [rad/s]
ωf
0
0
1
2
Punts de control
3
4
Polígon de control
5
6
t [s]
Domini convex
b) D’acord amb l’esquema del dibuix anterior i les propietats de les corbes de Bézier no
paramètriques, les ordenades de Bézier del tram de moviment són:
{wi } = wf {0, 0,1, 1}
L’expressió de la velocitat angular és, prenent t = 0 a l’inici de l’arrencada:
3
w = å wi Bi3 (u )
amb u =
i =0
t
ta
Les ordenades de Bézier ai de l’acceleració angular són:
{ai } = 3 wf {0, 1, 0} u
amb u =
1
ta
La corba de Bézier que defineix l’acceleració angular a és:
2
a = å ai Bi2 (u )
i =0
Laboratori de Màquines
Dep. d’Enginyeria Mecànica
5
Les ordenades de Bézier ji del desplaçament angular són:
w
1
{ji } = 4f {0, 0, 0, 1, 2} u
La corba de Bézier que defineix el desplaçament angular j és:
4
j = å ai Bi4 (u )
i =0
c) Per determinar la velocitat de funcionament wf es fa ús de la condició que durant
l’arrencada l’atracció ha de girar un angle ja = 3 rad. Així doncs, cal imposar que
j(u = 1) = ja.
w
w
j
1
j (u = 1) = ja = f 2 B44 (u = 1) = f 2 ta . D’on s’obté: wf = 2 a = 1 rad/s.
ta
4
u
4
d) L’acceleració angular és màxima en el centre del tram d’arrencada com es posa de
manifest per la simetria dels punts de control o fent nul·la la seva derivada, la
sobreacceleració.
1 1
amàx = a (u = 0, 5) = 3 wf B12 (u = 0, 5) u = 3 wf
= 0, 25 rad/s2 .
2 ta
Solució – Exercici 2
a) Si s’aplica el criteri de superposició de restriccions del moviment (Criteri de
Grübbler) dóna un número de Grübbler igual a 1.
5(sòlids mòbils) ´ 3 - 5(articulacions) ´ 2 - 2(p. prismàtics) ´ 2 = 1
Així doncs, el mecanisme té com a mínim 1 grau de llibertat, situació que es donarà
si no té redundàncies. Si s’atura la rotació del balancí O1P, j 1 = 0 , el punt P queda
en repòs; el punt Q queda en repòs perquè per pertànyer a la barra PQ hauria de fer
un cercle entorn del punt P, però també hauria de lliscar sobre la guia horitzontal i
aquestes dues trajectòries són incompatibles. Amb els punts P i Q aturats, el punt C
queda en repòs ja que el lliscament al llarg de la barra O1P i la rotació entorn d’O2
són incompatibles. Així doncs, el sistema té un grau de llibertat ja que anul·lant la
velocitat de rotació del balancí O1P tot el sistema queda en repòs.
El mecanisme no presenta redundàncies totals ja que coincideixen el nombre de graus
de llibertat i el número de Grübbler.
b) Les equacions d’enllaç geomètriques s’obtenen, per exemple, imposant el tancament
dels anells O1PQO1 i O1CO2O1: O1P + PQ + QO1 = 0 i O1C + CO2 + O2O1 = 0.
6
Laboratori de Màquines
Dep. d’Enginyeria Mecànica
ì
ï
l1 sin j1 - l 3 cos j3 - s2 = 0
ï
ï
ï
l1 cos j1 + l 3 sin j3 - (h1 + h2 ) = 0
ï
ï
í
ï
s1 sin j1 - l2 cos j2 = 0
ï
ï
ï
s cos j1 - l2 sin j2 - h1 = 0
ï
ï
î1
F (q ) = 0
La matriu jacobiana s’obté derivant les equacions d’enllaç geomètriques respecte a les
coordenades generalitzades.
æ
0
l 3 sin j3
çç l1 cos j1
çç -l sin j
0
l 3 cos j3
1
Fq (q ) = çç 1
çç s cos j
0
l2 sin j2
1
çç 1
0
ççè s1 sin j1 -l2 cos j2
0
-1÷ö
÷÷
0
0 ÷÷
÷÷
sin j1 0 ÷÷
÷÷
cos j1 0 ø÷÷
c) El centre instantani de rotació de la corredora C –IC– es pot determinar sabent que
la direcció de la velocitat de C és perpendicular a la recta O2C. Així doncs, IC es
troba sobre la recta O2C. Per
altra banda, l’aplicació del
v(C)
teorema dels tres centres als
O2
sòlids bancada -0-, barra O1P
IC
-1- i corredora C -2- indica
que IC es troba sobre la recta
perpendicular a O1P que passa
per O1. Així doncs, IC es troba
en la intersecció de la prolongació
d’O2C amb la perpendicular a
O1P que passa per O1, tal com
O1
mostra la figura.
d) Per tal de determinar l’amplitud d’oscil·lació Dj1 del balancí O1P cal conèixer el
valor de j1 en les configuracions de punt mort per a aquesta
O2
coordenada. Aquestes configuracions es donen quan la manovella
l2
O2C és perpendicular al balancí O1P. Aleshores:
l
l
j1 max = arcsin 2 Dj1 = 2 arcsin 2 = 69, 70º .
h1
h1
C
h1
ϕ
1
O1
Laboratori de Màquines
Dep. d’Enginyeria Mecànica
7
e) La cursa de la corredora C, Ds1, sobre el balancí O1P es determina a partir de les
P
configuracions de punt mort per a la coordenada s1.
s1 max es dóna quan j1 = 0º i j2 = 90º, com es mostra a la figura
adjunta. En conseqüència, s1 max = h1 + l2.
s1 min es dóna quan j1 = 0º i j2 = 270º. En conseqüència,
s1 min = h1 – l2.
C
Així doncs, Ds1 = h1 + l2 – (h1 – l2) = 2 l2 = 240 mm.
O2
s1 max
O1
f) En les configuracions de punt mort de la coordenada j1 j 1 = 0 , amb la qual cosa el
punt P passa a ser el centre instantani de rotació de la barra PQ i per tant el punt Q
hauria de tenir un moviment de rotació entorn del punt P. Aquest moviment és
incompatible amb el moviment de lliscament al llarg de la guia horitzontal. Així
doncs, el punt Q roman en repòs i en conseqüència les velocitats j 3 i s2 en aquestes
configuracions són nul·les. Per tant, les configuracions de punt mort per a la
coordenada j1 també ho són per a les coordenades j3 i s2.
Aquest fet també es pot deduir de l’estudi de la matriu jacobiana: de la segona fila
d’aquesta matriu s’observa que les configuracions de punt mort de la coordenada j1,
j 1 = 0 , coincideixen amb les configuracions de punt mort de la coordenada j3 i per
tant j 3 = 0 . Aquestes configuracions també es corresponen amb les configuracions de
punt mort per a la coordenada s2, com s’observa de la primera fila de la matriu
jacobiana, i per tant s2 = 0 .
8
Laboratori de Màquines
Dep. d’Enginyeria Mecànica
TEORIA DE MÀQUINES i MECANISMES
–
–
–
–
–
Curs 2018-2019
21 de gener del 2019
Contingut del sobre: enunciat, 4 fulls quadriculats i 3 fulls en blanc. No es
repartirà més material.
Per realitzar l’examen es disposa de tres hores.
Pel que fa al material escrit només es pot disposar d’un full A4 manuscrit original.
A l’hora d’entregar introduïu només els fulls quadriculats en el sobre.
És pertinent el contingut del document Pautes per a la realització de les proves
escrites i per a l’avaluació que es troba a Atenea.
Exercici 1 [3 punts]
ϕ
O
r = 80 mm
a = 100 mm
l = 130 mm
P
r
Tm
r
l
Q
R
S
T
F
a
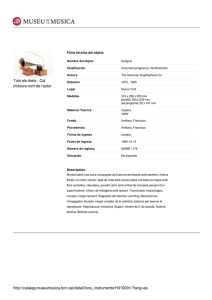
En el mecanisme de la figura, el frec entre la corredora P i la guia en forma d’L i a les
articulacions és negligible. El frec a l’enllaç, amb joc, entre l’element en forma de L i
la bancada és m. Sobre la manovella es realitza el parell Tm just necessari per iniciar el
moviment quan actua la força F sobre l’element en forma d’L. Per a -90º £ j £ 90º :
a) Dibuixeu, per separat, els diagrames de cos lliure de la manovella, de la corredora
P i de l’element en forma d’L. Indiqueu clarament els sentits i les orientacions de
les forces i moments.
b) Determineu l’expressió de la força NC entre la corredora i la guia en forma d’L, en
funció del coeficient de frec m i de la força F.
c) Estudieu la condició de falcament, entre la peça en forma d’L i la bancada, en
funció de j i determineu el valor numèric del coeficient de frec mínim mmin per
evitar-lo.
9
Exercici 2 [3 punts]
b3
S
b2
k
T
d4
Fp
R
Q
d3
l1
b1
ϕ
O
2
d2
Ft
l2
d1
P
ϕ
1
s
d1 =
d2 =
d3 =
d4 =
23
14
35
15
mm
mm
mm
mm
b1 = 145 mm
b2 = 18 mm
b3 = 15 mm
l1 = 55 mm
l2 = 45 mm
k = 1,9 N/mm
ρ0 = 100 mm
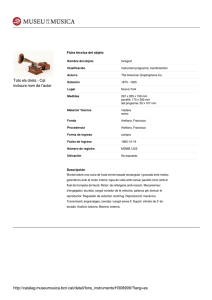
La figura mostra unes tisores de podar, previstes per arribar a branques allunyades, i
l’esquema simplificat per analitzar-les. La molla es troba distesa quan la distància
entre els seus extrems és r0. Per a l’estudi del mecanisme de les tisores, s’empra el
vector de coordenades generalitzades q ={j1, j2, s}T. Determineu:
a) El conjunt d’equacions d’enllaç geomètriques entre les coordenades generalitzades i
la seva matriu jacobiana Fq.
b) La velocitat vertical yT del punt T.
c) La distància r entre els punts R i S en funció de j1.
d) L’expressió de j 2 en funció de j1 i de la configuració, j 2 (q, j1 ) .
A la configuració q1 ={0º, –14,75º, 30,19mm}T, la velocitat de separació entre els
punts R i S és r = -46,10 j1 mm/s . Determineu per a aquesta configuració:
e) La força Fm que fa la molla.
f) La força vertical Fp que fa la persona si el tronc fa una força sobre les tisores
Ft = 2000N.
Segueix al darrera
10
Exercici 3 [4 punts]
Tambor
ω
Reductor
Motor
dt
g
Cabina, mt
Càrrega, mc
h=9m
v0 = 1,2 m/s
ta = 1,5 s
tt = 9 s
dt = 360 mm
ηm = 0,7
Frp = 1200 N
mt = 900 kg
mc = 600 kg
It = 2,4 kg·m2
Irm = 0,7 kg·m2
τ = (1/23)
L’elevador esquematitzat a la figura té un cicle de funcionament que consisteix en
pujar una càrrega una alçada h = 9 m i baixar en buit. Per tal d’evitar sotragades, el
moviment de l’elevador es programa utilitzant corbes de Bézier de manera que la
velocitat sigui, en tot instant, una funció temporal amb continuïtat C1.
Arrencada per a 0 < t £ ta
v = v0 (B23 (u ) + B33 (u )) = v0 (3u 2 - 2u 3 ) amb u = t / ta
Règim estacionari per a ta < t £ ta + t1
v = v0
Aturada per a ta + t1 £ t < 2ta + t1
v = v0 (B03 (u ) + B13 (u )) = v0 (1 - 3u 2 + 2u 3 ) amb u =
t - (ta + t1)
ta
L’arrencada es realitza en ta = 1,5 s, amb v0 = 1,2 m/s i el temps total de la maniobra
és tt = 9 s.
El moment axial d’inèrcia del tambor és It = 2,4 kg·m2. La inèrcia del conjunt motorreductor reduïda a l’eix del motor és Irm = 0,7 kg·m2. El reductor té una relació de
transmissió t = (1/23). Les resistències passives del conjunt reductor-tambor-cabina
reduïdes al moviment vertical de la cabina són equivalents a una força Frp = 1200 N.
El motor té un rendiment electromecànic hm = 0,7. Es considera que el cable no llisca
sobre el tambor i que la seva inèrcia és negligible. Per a una maniobra de pujada,
determineu:
a) L’acceleració màxima amax.
b) La inèrcia del conjunt reduïda a la rotació de l’eix del motor Ired.
c) El parell de les resistències passives del conjunt reductor-tambor-cabina reduïdes a
11
la rotació de l’eix del motor Trp.
d) El parell Tm a l’eix del motor. Feu-ne un gràfic temporal, indicant les escales. És
necessària l’actuació dels frens en el procés d’aturada? Justifiqueu la vostra
resposta.
e) L’energia Emotor que ha de subministrar el motor i l’energia elèctrica consumida
Eelec, en W·h.
12
Solució Exercici 1
M
a)
VP
NC
HP
HO
VP
M
Tm
NC
VO
HP
NQ
TQ
F
TT
NT
b) L’aplicació del teorema del moment cinètic a la corredora posa de manifest que
M = 0.
De l’aplicació del teorema de la quantitat de moviment i del teorema del moment
cinètic al punt Q per al sòlid en forma d’L s’obté:
å Fext
L
ìïN -T -T - F = 0
ï C
Q
T
í
ïïN T - N Q = 0
î
å M ext (Q) 3
L
N T ⋅ a - N C ⋅ (r + r cos( j ) ) = 0
Tenint en compte que entre l’element en forma d’L i la bancada hi ha lliscament:
TQ = m NQ i TT = m NT. Operant, s’obté:
N C = TQ + TT + F
NC = F
1
r
1 - 2 ⋅ m ⋅ 1 + cos j
a
(
)
[1]
c) De l’expressió [1], s’observa que quan del denominador es fa nul s’obté el coeficient de
frec que delimita el falcament del lliscament per a cada angle j.
1-2⋅ m⋅
r
1
a
1 + cos j = 0 mllindar =
a
2 r 1 + cos j
(
)
(
)
El valor mínim d’aquesta funció correspon a j = 0º i és mmin = 0,3125 i és el valor
del coeficient de frec per sota del qual no es produeix falcament per a cap valor de j.
Solució Exercici 2
a) Les equacions d’enllaç es troben, per exemple, imposant la condició de tancament de
l’anell OPQO i la matriu jacobiana s’obté derivant-les respecte a les coordenades
generalitzades.
Laboratori de Màquines
Dep. d’Enginyeria Mecànica
13
F(q ) = 0
ìïd + s cos j - l cos j = 0
1
1
2
ïí 1
ï+
d
s
sin
j
l
sin
j
1
1
2 =0
ïî 2
æ-s sin j
l1 sin j2
1
Fq = ççç
çè s cos j1 -l1 cos j2
cos j1 ö÷
÷÷
sin j1 ÷÷ø
b) La velocitat vertical del punt T es determina per derivació de la coordenada yT del
punt T. Si es pren l’origen en el punt O:
y T = -d2 + b1 sin j1 - b2 cos j1
yT = (b1 cos j1 + b2 sin j1 ) j1
c) La distància r entre els punts R i S es pot determinar fent ús d’un díedre d’eixos
horitzontal i vertical:
12
æ
2
2ö
r = çç(d1 + b1 cos j1 - b3 sin j1 - d4 ) + (b1 sin j1 + b3 cos j1 - d2 - d3 ) ÷÷÷
çè
ø
d) La velocitat angular j 2 en funció de la velocitat angular j 1 i de la configuració es
pot determinar aplicant l’expressió de l’anàlisi de velocitats:
-1
( ) (F q + F )
q d = - Fqd
i
q
i
t
-1
æ l sin j
ü
ïìïj 2 ïüï
cos j1 ö÷ ïì
ç
ï-s sin j1ïï j
1
2
÷
í ý = - çç
í
ý
÷
1
ïï s ïï
s cos j1 ï
çè-l1 cos j2 sin j1 ÷ø÷ ï
ï
ï
î þ
î
þ
s
1
s = s tan (j1 - j2 ) j1
j 2 =
j
l1 cos (j1 - j2 ) 1
e) La força Fm que fa la molla és d’atracció entre els seus extrems. Per tant:
Fm = k (r - r0 ) . En la configuració j1 = 0º, Fm = 107,8 N.
f) Per determinar la força Fp que fa la persona es proposa emprar el mètode de les
Potències Virtuals prenent com sistema el mecanisme i realitzar un moviment virtual
compatible amb els enllaços per tal que no apareguin les forces d’enllaç en l’expressió
de les potències virtuals.
å
sistema
*
P =0
*
- Fp yT + Ft l2 j 2*
*
- Fm r = 0
Fp =
Ft l2 j 2* - Fm r *
yT*
Les relacions entre les velocitats virtuals yT*, j 2*, r * i j 1* coincideixen amb les
relacions entre les velocitats reals, ja que es realitza un moviment virtual compatible
amb els enllaços. En la configuració q1 indicada a l’enunciat:
yT* = b1 j 1* = 145 j 1*, j 2* =
s
j 1* = 0, 5676 j 1* i r * = -46,10 j 1*
l1 cos j2
Per tant Fp = 386,6 N.
14
Lab. de Màquines
Dept. Enginyeria Mecànica
Solució Exercici 3
a) Tal com es pot observar en les expressions de la velocitat, l’arrencada i l’aturada són
simètriques. Així doncs, l’acceleració màxima, en valor absolut, serà la mateixa en els
dos trams. L’expressió de l’acceleració es troba derivant. El seu màxim està en el
centre del tram d’arrencada (t = 0,75 s o bé u = 0,5) com es pot comprovar per
derivació o bé per les propietats dels polinomis de Bernstein.
dv
1
a(u ) = v =
u = v0 (6u - 6u 2 )
a max = 1, 2 m/s2
du
ta
b) L’energia cinètica del conjunt és (rt = dt/2):
1
1
1
1
2
E c = m t v 2 + m c v 2 + I t wt2 + I rm wm
2
2
2
2
1
2 2
2
2
E c = (m t + mc )rt t + I t t + I rm wm
2
Per tant, la inèrcia del conjunt reduïda a la rotació de l’eix del motor és:
(
)
I red = (m t + mc )rt2 t 2 + I t t 2 + I rm = 0, 7964 kg·m2 .
c) La potència dissipada per les resistències passives es pot trobar a partir de la força
reduïda al moviment de la cabina. A partir d’aquesta potència, es pot determinar el
parell de les resistències passives reduït a la rotació de l’eix del motor.
Prp = Frp v = Frp wt rt = Frp wm t rt = Trp wm . Per tant, Trp = Frp t rt = 9, 391 N·m.
d) Si s’aplica el principi de conservació de l’energia en versió diferencial al sistema
format pel reductor-tambor-cabina-càrrega:
Psubministrada = Pacumulada + Pcedida
Pmotor = E c + E p + Prp
Tm wm = I redwmam + (m t + mc ) g rt t wm + Trpwm
at
+ (m t + m c ) g rt t + Trp
t
a(u )
+ (m t + m c ) g rt t + Trp
Tm = I red
t rt
Tm = I red
La següent figura mostra l’evolució temporal del parell motor per a la maniobra de
pujada.
Laboratori de Màquines
Dep. d’Enginyeria Mecànica
15
El parell obtingut és sempre positiu. Per tant, en el procés d’aturada no cal
l’aplicació dels frens.
e) Si s’aplica el principi de conservació de l’energia al sistema format pel reductortambor-cabina-càrrega des de l’inici fins al final de la pujada:
E subministrada = E acumulada + E cedida
E motor = (m t + m c ) g h + Frp h = 143, 2 kJ
Per tant, l’energia elèctrica consumida en una maniobra de pujada és:
E
E elec = motor = 56, 82 W·h
h
16
Lab. de Màquines
Dept. Enginyeria Mecànica
TEORIA DE MÀQUINES i MECANISMES Curs 2018-2019
–
–
–
–
–
5 d'abril del 2019
Contingut del sobre: Enunciat, 3 fulls quadriculats i 2 fulls en blanc. No es
repartirà més material.
Per realitzar els dos exercicis es disposa d’una hora i quart.
Pel que fa al material escrit només es pot disposar d’un full A4 manuscrit original.
A l’hora d’entregar introduïu els fulls quadriculats en el sobre.
És pertinent el contingut del document Pautes per a la realització de les proves
escrites i per a l’avaluació que es troba a Atenea.
Exercici 1 [4 punts]
g
O
Estació
superior
ϕ
Braç
C
ta = 3 s tf = 3 s ωe = 0,1 rad/s
Cabina
Estació
inferior
Un elevador transporta passatge des de l’estació inferior, j = 0º, fins a l’estació
superior, j = 90º. El braç de l’elevador ha d’adquirir la velocitat we = 0,1 rad/s en un
temps ta = 3 s, ha de mantenir constant aquesta velocitat durant un temps te i ha de
frenar fins al repòs en un temps tf = 3 s.
Es desitja realitzar aquesta maniobra amb corbes de Bézier de grau mínim i que
garanteixin continuïtat C1 per a la llei de velocitat angular.
a) Representeu esquemàticament, però de manera pulcra i posant de manifest els
trets més rellevants, la llei de velocitat angular w(t) del braç en funció del temps
per a una maniobra de pujada.
b) Determineu l’angle ja girat durant l’arrencada.
c) Determineu el temps total tt d’una maniobra de pujada.
d) Dibuixeu, posant de manifest els trets més rellevants, l’acceleració angular a(t) en
una maniobra de pujada.
17
Exercici 2 [6 punts]
s2
R
T
Q
h1
l1
P
O1
ϕ
z1
1
l1 = 50 mm
h1 = 100 mm
h2 = 100 mm
z1 = 56
z2 = 22
n = 700 min-1
s1
ϕ
z2
n
h2
2
O2
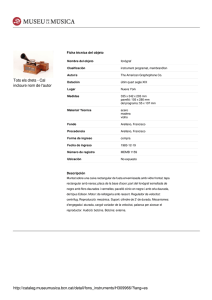
Una variant del mecanisme de retorn ràpid de Whitworth es pot esquematitzar tal
com es mostra a la figura. Un reductor, el pinyó del qual gira a n = 700 min–1,
acciona el mecanisme en el qual la manovella O1P és solidària a la roda dentada de
centre O1. Per al seu estudi, s’utilitza el vector de coordenades generalitzades
q = {j1, j2, s1, s2,}T. Determineu:
a) El nombre de graus de llibertat i la possible existència de redundàncies. Justifiqueu
adequadament les respostes.
b) Les equacions d’enllaç geomètriques entre les coordenades generalitzades i la seva
matriu jacobiana Fq.
c) El centre instantani de rotació de la corredora P.
d) L’amplitud Ds2 del recorregut total de Q.
e) La velocitat j 2 en el punt mort màxim d’s1.
18
Solució – Exercici 1
a) Per garantir la continuïtat global de la llei de velocitat angular w(t), cal garantir la
continuïtat en els punts d’unió del tram de repòs amb el tram de velocitat constant,
en l’interior d’aquest tram i entre aquest tram i el tram de frenada fins al repòs. Si es
desitja realitzar aquests canvis amb corbes de Bézier de grau mínim i de continuïtat
C1 en cadascun dels punts d’unió cal utilitzar 2 punts de control alineats amb el
tram de repòs i 2 punts alineats amb el tram de velocitat constant. Això fa que les
corbes de Bézier de grau mínim per definir els trams de canvi de velocitat siguin de
grau 3. La continuïtat interna queda garantida per la pròpia continuïtat de la corba
de Bézier i del tram recte.
ω
e
t
t
a
t
e
Punts de control
Polígons de control
f
Dominis convexos
b) Per tal de determinar l’angle ja girat durant l’arrencada, cal integrar la velocitat
angular en el procés d’arrencada. D’acord amb l’esquema del dibuix anterior i les
propietats de les corbes de Bézier no paramètriques, les ordenades de Bézier
corresponents a la velocitat angular del tram d’arrencada són:
{wi } = we {0, 0,1, 1}
L’expressió de la velocitat angular és, prenent t = 0 a l’inici de l’arrencada:
3
w (u ) = å wi Bi3 (u )
amb u =
i =0
t
ta
Les ordenades de Bézier ji del desplaçament angular són:
w
{ji } = 4e {0, 0, 0, 1, 2} u1
amb u =
Laboratori de Màquines
Dep. d’Enginyeria Mecànica
1
ta
19
La corba de Bézier que defineix el desplaçament angular j és:
4
j (u ) = å ji Bi4 (u )
i =0
L’angle ja girat durant l’arrencada es determina a partir d’avaluar j(u) per a u = 1:
ja = j (u = 1) =
we
4
⋅ 2 ⋅ B44 (u = 1) ⋅
w
1
= e ta = 0,15 rad .
u
2
c) Per determinar el temps total tt d’una maniobra de pujada cal saber el temps te en el
qual l’elevador es mou a la velocitat constant we. Aquest temps es pot determinar a
partir de l’angle jt total girat:
jt = ja + je + jf = 2 ja + je je = wete = jt - 2 ja te =
t t = ta + t e + t f = ta +
jt - 2 ja
we
jt - 2 ja
we
+ tf = 18, 71 s .
d) Les ordenades de Bézier aia de l’acceleració angular en el tram d’arrencada són:
{aia } = 3 we {0, 1, 0} u
Per simetria de les corbes de Bézier, les ordenades de Bézier aif de l’acceleració
angular en el tram de frenada són:
{aif } = 3 we {0, - 1, 0} u
Així doncs, l’acceleració angular a en la maniobra de pujada és:
ì
2
ï
ï
ï
å aiaBi2 (u ); u = t ta
ï
ï
ï
ïi =0
a (t ) = í
0
ï
ï
2
ï
ï
aif Bi2 (u ); u = (t - ta - te ) t t
ï
å
ï
ï
ï
îi =0
α [rad/s2]
El seu gràfic és:
0 < t £ ta
ta < t £ ta + t e
ta + t e < t £ t t
0,05
0,025
0
-0,025
-0,05
20
0
5
10
t [s]
15
20
Laboratori de Màquines
Dep. d’Enginyeria Mecànica
Solució – Exercici 2
a) Si s’aplica el criteri de superposició de restriccions del moviment (Criteri de
Grübbler) dóna un número de Grübbler igual a 1.
6(sòlids mòbils) ´ 3 - 5(articulacions) ´ 2 - 3(p. prismàtics) ´ 2 - 1(transmissió) ´ 1 = 1
Així doncs, el mecanisme té com a mínim 1 grau de llibertat, situació que es donarà
si no té redundàncies. Si s’atura la rotació del pinyó, n = 0, la roda de centre O1
queda en repòs i en conseqüència el punt P queda en repòs i el triangle O1PO2 queda
fixat; per tant el balancí O2R no es mou i tampoc no ho fa la corredora Q. Així
doncs, el sistema té un grau de llibertat ja que anul·lant la velocitat de rotació del
pinyó tot el sistema queda en repòs.
El mecanisme no presenta redundàncies totals ja que coincideixen el nombre de graus
de llibertat i el número de Grübbler.
b) Les equacions d’enllaç geomètriques s’obtenen, per exemple, imposant el tancament
dels anells O1PO2O1 i fent atenció al triangle O2RT.
ì
ï
-l1 cos j1 + s1 sin j2 = 0
ï
ï
ïíl sin j - s cos j + h = 0
1
1
1
2
2
ï
ï
h + h2 ) tan j2 - s2 = 0
ï
ï
î( 1
F (q ) = 0
La matriu jacobiana s’obté derivant les equacions d’enllaç geomètriques respecte a les
coordenades generalitzades.
æ
ççl1 sin j1
ç
Fq (q ) = ççl1 cos j1
çç
çç 0
è
s1 cos j2
s1 sin j2
(h1 + h2 )
cos2 j2
sin j2
- cos j2
0
÷÷ö
÷÷
÷÷
÷÷
-1÷÷ø
0
0
c) El centre instantani de rotació de la corredora P –IP– es pot determinar sabent que la
direcció de la velocitat de P és
v(P)
perpendicular a la recta O1P. Així doncs,
P
O1
IP es troba sobre la recta O1P. Per altra
banda, l’aplicació del teorema dels tres
centres als sòlids bancada -0-, balancí
O2R -1- i corredora P -2- indica que
IP
IP es troba sobre la recta perpendicular a
O2R que passa per O2. Així doncs, IP es
troba en la intersecció de la prolongació
d’O1P amb la perpendicular a O2R que
passa per O2, tal com mostra la figura.
O2
Laboratori de Màquines
Dep. d’Enginyeria Mecànica
21
d) Per simetria, l’amplitud Ds2 del recorregut total de Q és el doble d’s2 max. Les
configuracions de punt mort d’s2 coincideixen amb les configuracions de punt mort de
la coordenada j2 que es donen quan la manovella O1P és
O1
perpendicular al balancí O2R com mostra la figura. Aleshores:
l1
l
j2 max = arcsin 1 = 30º . Per tant:
h2
P
ϕ
2
h2 Ds2 = 2 s2 max = 2 (h1 + h2 ) tan j2 max = 230, 9 mm
O2
e) s1 max es dóna quan j1 = 90º i j2 = 0º, com es mostra a la figura adjunta. En
conseqüència, s1 max = h2 + l1. En aquesta configuració la velocitat del punt P de la
manovella O1P i la velocitat del punt P del balancí O2R coincideixen. Per tant:
s1 maxj 2 = l1 j 1
R
j 2 =
l1
h2 + l1
j 1 .
Alternativament, aquesta expressió també es pot deduir a partir de
la primera fila de la matriu jacobiana particularitzada a la
configuració de punt mort s1 max.
La velocitat j 1 es determina a partir de la relació de transmissió
del reductor:
P
t=
j 1
n
O1
s1 max
2p
60
j 2 = -
=
l1
z2
j 1 =
z1
z2
h2 + l1 z1
n
z2
z1
n
2p
60
2p
= 9, 599 rad/s
60
O2
22
Laboratori de Màquines
Dep. d’Enginyeria Mecànica
TEORIA DE MÀQUINES i MECANISMES
–
–
–
–
–
Curs 2018-2019
7 de juny del 2019
Contingut del sobre: enunciat, 4 fulls quadriculats i 3 fulls en blanc. No es
repartirà més material.
Per realitzar l’examen es disposa de tres hores.
Pel que fa al material escrit només es pot disposar d’un full A4 manuscrit original.
A l’hora d’entregar introduïu només els fulls quadriculats en el sobre.
És pertinent el contingut del document Pautes per a la realització de les proves
escrites i per a l’avaluació que es troba a Atenea.
Exercici 1 [3 punts]
l3
l2
g
l1 = 125 mm
l2 = 50 mm
l3 = 225 mm
r = 25 mm
R = 75 mm
O1
l1
R
Q
A
P
m2
r
m1 = 150 kg
m2 = 50 kg
I = 1,3 kg m2
F = 750 N
μ = 0,2
F
O2
m1
En el mecanisme de la figura, l’eix de radi r i centre O2 és solidari a la politja de radi
R. El conjunt eix-politja té un moment d’inèrcia I respecte al punt O2. L’eix es pot
frenar mitjançant la barra articulada O1PQ, de massa negligible, quan s’aplica una
força F al punt Q. Es considera que el cable no té massa i que no llisca respecte la
politja i que totes les resistències passives són negligibles excepte en el contacte
puntual A entre la barra articulada O1PQ i l’eix, on hi ha frec sec de coeficient m.
Si es parteix del repòs:
a) Justifiqueu si la politja de radi R es manté en repòs o gira i, en aquest cas, en quin
sentit ho fa.
Si amb el resultat de l’apartat anterior es considera que en el punt Q hi actua la força
F vertical indicada:
b) Dibuixeu el diagrama de cos lliure de la barra articulada O1PQ.
c) Determineu el valor de la força normal NA en el punt A.
d) Determineu el coeficient de frec mínim mmin per tal que es produeixi falcament si
s’intercanvien els dos blocs i el valor de la força F no varia.
23
Exercici 2 [3 punts]
e
G
g
R
Q
T
P
e’
y
roda 2
O2
ϕ
|O2P|= l = 150 mm
|PQ|= l = 150 mm
|RP|= l = 150 mm
|PS|= l = 150 mm
z1 = 8
z2 = 85
m = 2 kg
Trp = 2 N·m
S
ω
O1
roda 1
z1
z2
x
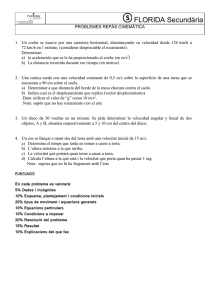
La figura mostra la fotografia i l’esquema del mecanisme motoritzat d’un alçavidres
d’una finestra fixat a la porta d’un vehicle.
El vidre, de massa m = 2 kg i amb centre d’inèrcia a G, es considera solidari a la
barra horitzontal RQT que llisca respecte la guia vertical e-e’ fixa al vehicle. La resta
d’elements es consideren de massa i d’inèrcia negligibles.
Les resistències passives del mecanisme es modelitzen com un parell de frec
Trp = 2 N·m a l’articulació O2.
El motor acciona la roda dentada de centre O1 que engrana amb la roda de centre O2
solidària a la barra O2Q.
Per tal de fer l’anàlisi cinemàtica i dinàmica del mecanisme, s’empra el conjunt de
coordenades generalitzades q = {j, x, y}T. Determineu:
a) Les equacions geomètriques d’enllaç entre les coordenades generalitzades i la seva
matriu jacobiana Fq.
b) L’expressió de la velocitat vertical y de la corredora T en funció de la velocitat
angular w de la roda de centre O1.
c) L’expressió del parell motor Tm que ha de realitzar el motor que acciona la roda de
centre O1 per fer pujar el vidre a velocitat constant.
Si l’alçavidres no fos motoritzat i s’accionés manualment amb la palanca MO1, com
s’indica a la figura, determineu:
M
FM
O1
|O1M|=lM = 100 mm
d) L’expressió de la força FM perpendicular a la maneta que hauria de fer la persona
que accionaria l’alçavidres per fer pujar el vidre a velocitat constant.
Segueix al darrera
24
Exercici 3 [4 punts]
Motor
TMM
T
M
Imot = 2 kg·m2
ηe-m = 0,8
ωm
Reductor
ωr
Ired = 6 kg·m2
τred = 0,16
ηred = 0,7
Receptor
Ir = 60 kg·m2
Trp = 50 N·m
nr = 120 min–1
tc = 5 s
Potència útil
kW
2
0
1
2
3
4
5
s
Un motor elèctric acciona, a través d’un reductor, el receptor d’una màquina que gira
a nr = 120 min–1. El receptor en règim estacionari ha de subministrar la potència
indicada a la figura per tal de realitzar la tasca per a la qual ha estat concebut.
Les característiques de la cadena motor–reductor–receptor són:
Grup motor:
Inèrcia reduïda a la rotació del seu eix Imot = 2 kg·m2
Rendiment electromecànic he-m = 0,8
Reductor:
Inèrcia reduïda a l’eix d’entrada Ired = 6 kg·m2
Relació de transmissió tred = wr/wm = 0,16
Rendiment hred = 0,7
Receptor:
Inèrcia reduïda a l’eix d’entrada Ir = 60 kg·m2
Resistències passives reduïdes a l’eix d’entrada Trp = 50 N·m
Temps de cicle en règim estacionari tc = 5 s
Es considera que els rendiments i les resistències passives no depenen de l’estat de
càrrega.
Determineu, en règim estacionari i considerant la velocitat de gir wr sensiblement
constant:
a) L’energia útil per cicle Eútil, dedicada a fer la tasca.
b) L’energia elèctrica Eelec, en kW·h, consumida durant una jornada de tj = 8h.
c) Les potències elèctrica Pelec i dissipada Pdis mitjanes en un cicle en tota la cadena
motor–reductor–receptor.
25
Si la potència elèctrica d’alimentació fos constant i igual a la potència elèctrica
mitjana Pelec,
d) Determineu l’expressió de l’acceleració angular ar de l’eix d’entrada del receptor.
e) Dibuixeu el gràfic de l’acceleració angular ar per a un cicle.
26
Solució Exercici 1
a) Si es parteix del repòs i es té en compte que m1 > m2 la politja de radi R, solidària a
l’eix de radi r, girarà en sentit horari.
b) Tenint en compte que l’eix gira en sentit horari, la força de contacte horitzontal en el
punt A és de fricció i sobre la barra articulada O1PQ té sentit cap a la dreta.
VO
HO
TA = μNA
NA
F
c) La barra articulada O1PQ està en repòs. Si s’hi aplica el teorema del moment cinètic
al punt O1 s’obté:
å M ext (O1 ) 3
O1PQ
N A ⋅ l2 + TA ⋅ l1 - F ⋅ l 3 = 0 N A ⋅ l2 + m ⋅ N A ⋅ l1 - F ⋅ l 3 = 0
Operant, s’obté:
NA = F
l3
l2 + m ⋅ l1
= 2250 N
[1]
d) Si s’intercanvien els dos blocs la politja tendirà a girar en sentit antihorari. En aquest
cas la força tangencial de contacte en el punt A sobre la barra articulada O1PQ té
sentit cap a l’esquerra. L’aplicació del teorema del moment cinètic al punt O1
condueix a:
å M ext (O1 ) 3
O1PQ
N A ⋅ l2 - TA ⋅ l1 - F ⋅ l 3 = 0 N A ⋅ l2 - m ⋅ N A ⋅ l1 - F ⋅ l 3 = 0
Operant s’obté:
NA = F
l3
l2 - m ⋅ l1
.
Es produirà falcament quan NA tendeixi a infinit. Per tant: mmin =
l2
l1
= 0, 4 .
Solució Exercici 2
a) El mecanisme té un grau de llibertat i, per tant, és holònom. Per fer-ne l’anàlisi
cinemàtica i dinàmica s’empren tres coordenades generalitzades amb la qual cosa es
necessiten dues equacions d’enllaç geomètriques que les relacionin. Aquestes
Laboratori de Màquines
Dep. d’Enginyeria Mecànica
27
equacions es poden obtenir, per exemple, imposant la condició de tancament de
l’anell O2SQRO2 i la matriu jacobiana s’obté derivant-les respecte a les coordenades
generalitzades.
F(q ) = 0
æ 2l sin j 1 0ö÷
÷÷
Fq = ççç
çè-2l cos j 0 1÷÷ø
ìïx - 2l cos j = 0
ïí
ïïy - 2l sin j = 0
î
b) La velocitat vertical de la corredora T s’obté, per exemple, derivant la segona equació
geomètrica d’enllaç:
y = 2 l j cos j.
Per tal de relacionar la velocitat angular de la roda 2, j, amb la velocitat angular de
la roda 1, w, només cal tenir en compte la relació de transmissió entre aquestes dues
velocitats.
t=
z
j
= 1
w z2
y = 2 l
z1
z2
w cos j
c) Per determinar parell motor Tm es proposa emprar el mètode de les Potències
Virtuals prenent com sistema el mecanisme i realitzar un moviment virtual
compatible amb els enllaços per tal que no apareguin les forces d’enllaç en l’expressió
de les potències virtuals.
å
P* = 0
Tm w * -Trpj * - mg y * = 0
sistema
Tm =
[1]
Trp j * + mg y *
w*
Les relacions entre les velocitats virtuals yT*, j * i w * coincideixen amb les relacions
entre les velocitats reals, ja que es realitza un moviment virtual compatible amb els
enllaços.
j * =
z1
z2
w*
y* = 2 l
Per tant Tm = Trp
z1
z2
z1
z2
w * cos j
+ mg 2 l
z1
z2
cos j.
d) Per determinar la força Fm es proposa emprar el mètode de les Potències Virtuals
prenent com sistema el mecanisme i realitzar un moviment virtual compatible amb
els enllaços. En aquest cas:
å
sistema
28
P* = 0
FM l Mw * -Trpj * - mg y * = 0 . Si es compara aquesta expressió
Laboratori de Màquines
Dept. Enginyeria Mecànica
amb l’expressió [1], s’observa que FM =
Tm
lM
=
ö
z
z
1 æç
ççTrp 1 + mg 2 l 1 cos j÷÷÷ .
÷ø
l M çè
z2
z2
Solució Exercici 3
a) L’energia útil per cicle és la integral de la potència donada en el gràfic (àrea
compresa entre la corba de potència útil i l’eix d’abscisses).
E útil =
5
ò0 Pútil dt = 6000 J
b) L’energia elèctrica consumida, en règim estacionari i en un cicle de treball, es pot
obtenir a partir de l’aplicació del principi de conservació de l’energia al receptor. En
estar en règim estacionari l’Eacumulada en un cicle de treball és nul·la.
E subministrada = Eacumulada + E cedida = E rp + E útil
E subministrada = E elec 1 cicle he-m hred
E rp = Trpjcicle = Trpwrtc
Per tant, l’energia elèctrica en un cicle és:
E elec 1 cicle =
E rp + E útil
he-m hred
=
Trpwrtc + E útil
he-m hred
= 16, 32 kJ
Per tant, l’energia elèctrica consumida en tota una jornada de treball és:
tj
E elec = E elec 1 cicle = 94, 03 MJ = 26,12 kW·h
tc
c) La potència elèctrica mitjana en un cicle es pot trobar:
E
Pelec = elec 1 cicle = 3, 265 kW .
tc
La potència dissipada mitjana en tota la cadena és:
Pdis = Pdis m + Pdis red + Pdis rec
Pdis = Pelec (1 - he-m ) + Pelec 1 ciclehe-m (1 - hred ) + Trpwr
Pdis = Pelec (1 - he-m hred ) + Trpwr
Per tant:
E
Pdis = elec 1 cicle (1 - he-m hred ) + Trpwr = 2, 065 kW
tc
d) Si s’aplica el principi de conservació de l’energia en versió diferencial al conjunt
motor–reductor–receptor:
Psubministrada = Pacumulada + Pcedida
Pelec = E c mot + E c red + E c r + Pdis mot + Pdis red + Prp + Pútil
Laboratori de Màquines
Dep. d’Enginyeria Mecànica
29
wa
E c mot = I motwmam = I mot r r ;
2
t red
Pdis mot = (1 - he-m )Pelec ;
wa
E c red = I redwmam = I red r r ;
2
t red
E c r = I r wrar
Pdis red = (1 - hred ) (he-mPelec - I motwmam ) ;
Prp = Trpwr
Reescrivint el balanç de potències s’arriba a l’expressió de l’acceleració angular ar:
ar =
he-m hredPelec -Trpwr - Pútil
æh
ö÷
çç red
1
÷
çç 2 I mot + 2 I red + I r ÷÷ wr
çè t red
t red
ø÷
e) L’expressió obtinguda a l’apartat anterior correspon a una equació diferencial. Amb
les dades de l’enunciat i fent la hipòtesi que la velocitat angular wr es manté
sensiblement constant i igual al valor del règim estacionari, el gràfic de l’acceleració
angular ar és el mostrat a la figura.
α[rad/s2]
0,5
0,2736
0,25
0
−0,1824
-0,25
-0,5
1
30
2
3
4
5
t[s]
Laboratori de Màquines
Dept. Enginyeria Mecànica