- Ninguna Categoria
Manual de Usuario del Controlador de Ascensor NICE3000new
Anuncio
Prefacio Gracias por comprar el controlador integrado NICE3000new para ascensor. El NICE3000new es un controlador integrado de ascensor de nueva generación desarrollada independientemente por Suzhou MONARCH Control Technology Co., Ltd. mediante la optimización del controlador NICE3000 basada en un gran número de aplicaciones y la combinación de nuevas características industriales. El NICE3000new tiene las siguientes ventajas: 1) Es compatible con el control del vector de altas prestaciones y el funcionamiento de circuito abierto de baja velocidad. Se puede conducir tanto motor asíncrono y motor síncrono magnético permanente(PMSM), y pone en práctica la conmutación entre los dos tipos de motores fácilmente mediante la modificación de un solo parámetro. 2) Es compatible con la conexión directa en paralelo de dos ascensores y es compatible con protocolos de comunicacióncon del CANbus y Modbus para el control remoto, lo que reduce la cantidad necesaria de cables viajeros. 3) Se admite un máximo de 40 pisos y se aplica extensamente a los ascensores utilizados en la residencia, edificios de oficinas, centros comerciales y hospitales. En este manual se describe el uso correcto del NICE3000new, incluyendo las características del producto, información de seguridad y las precauciones, instalación, ajuste de parámetros, puesta en marcha y el mantenimiento y la inspección. Lea y comprenda el manual antes de usar el producto, y consérvelo cuidadosamente para el mantenimiento futuro. El personal que participa en la instalación, puesta en servicio y mantenimiento del sistema deben recibir la formación necesaria de seguridad y de uso, tiene que comprender este manual en su totalidad y tiene la experiencia relacionada antes de realizar operaciones. Notas 1) Los dibujos del manual a veces se muestran sin cubiertas o protecciones. Recuerde instalar las cubiertas o dispositivos de protección como se especifica en primer lugar, y luego realizar las operaciones de acuerdo con las instrucciones. 2) Los dibujos del manual se muestran sólo para la descripción y es posible que no coincidan con el producto que ha adquirido. 3) Las instrucciones están sujetas a cambios, sin previo aviso, debido a la actualización del producto, modificación de especificaciones, así como los esfuerzos para aumentar la precisión y conveniencia del manual. 4) Póngase en contacto con nuestros agentes o centro de servicio al cliente si usted tiene algunas preguntas durante el uso. Introducción 1. Comparación con el NICE3000 La siguiente tabla muestra la comparación entre el NICE3000new y el NICE3000. artículo NICE3000 NICE3000new Número máximo de pisos 31 (estándar) 40 (estándar) 4 m/s 4 m/s Velocidad máxima del ascensor 24 entradas, 6 salidas, 3 entradas de E / S terminales 24 entradas, 6 salidas CANbus 1 x CANbus 2 x CANbus Modbus 1 x Modbus 1 x Modbus Tipo de conducción de Control separado para motores Control motor síncronos y asíncronos alto-voltaje integrado para motores síncronos y asíncronos Compatible para : Arranque de célula sin Compatible carga Control vectorial de flujo sin sensor (SFVC) Control vectorial de lazo cerrado (CLVC) LCD operator Puesta en servicio en el interior del coche para codificador SIN/COS Modo de control solo Codificador de empujar/tirar Codificador incremental de colector abierto codificador de UVW Codificador SIN/COS Codificador endat Control vectorial de flujo sin sensor (SFVC) Control vectorial de lazo cerrado (CLVC) Control V / F No compatible Compatible No compatible Compatible Verificación de Producto Al desembalar, compruebe: Si el modelo de la placa de identificación y calificaciones de AC accionamiento son consistentes con su pedido. La caja contiene el controlador, certificado de conformidad, manual de uso y tarjeta de garantía. Si el controlador está dañado durante el transporte. Si usted encuentra cualquier omisión o daños, póngase en contacto con Monarch o con su proveedor de inmediato. Uso por primera vez Para los usuarios que utilizan este producto por primera vez, lea el manual cuidadosamente. En caso de duda en relación con algunas de las funciones o el rendimiento, póngase en contacto con el personal de soporte técnico de Monarch para asegurar el uso correcto. Marcado CE La marca CE en el NICE3000new declara que el controlador cumple con la directiva europea de baja tensión (LVD) y la directiva EMC. El controlador de la serie NICE3000new cumple con las siguientes directivas y normas de LVD y EMC: Directiva Código de directiva Estándar EN 61800-3 Directiva EMC 2004/18/EC EN 55011 EN 61000-6-2 Directiva LVD 2006/95/EC 93/68/EEC EN 61800-5-1 El controlador de la serie NICE3000new cumple con los requisitos de la norma IEC / EN 61800-3 en condición de la instalación y uso correcto siguiendo las instrucciones del capítulo 8 "EMC". La conexión a dispositivos periféricos No instale el condensador o supresor de sobretensiones en el lado de salida del controlador. De lo contrario, puede provocar fallos en el controlador o daños al condensador o supresor de sobretensiones. Entradas / Salidas (circuito principal) del controlador contienen armónicos, que pueden interferir con el dispositivo de comunicación conectado al controlador. Por lo tanto, instale un filtro anti-interferencias para minimizar la interferencia. Para más detalles sobre los dispositivos periféricos, consulte las guías de selección relacionada. 3.Lista de funciones del NICE3000new Funciones comunes de conducir En funcionamiento automático o estado asistente, esta función permite que el Full collective ascensor responda tanto llamadas de cabina como llamadas de piso. Pasajeros selective en cualquier piso de servicio pueden llamar al ascensor pulsando el botón de llamada y botón de llamada hacia abajo. Ajuste del tiempo El sistema determina automáticamente el diferente tiempo de apertura de puerta de retención de la para la llamada, comando, protección, o el retraso de acuerdo con el ajuste de apertura de puerta tiempo de retención de apertura de puerta. Retención de la apertura de puerta En el estado de funcionamiento automático, los pasajeros pueden presionar el botón de apertura de la puerta en el coche para retrasar la apertura de puerta para facilitar el transporte de mercancías hacia dentro o fuera. Configuración para pisos de servicio de las Puede establecer los pisos de servicio solicitados de las máquinas de la puerta. máquinas de la puerta Pre-apertura de la puerta por el botón de cierre de puerta Durante la retención de la apertura de la puerta en estado de funcionamiento automático, los pasajeros pueden presionar el botón del cierre de la puerta a cerrar la puerta con antelación, lo que mejora la eficiencia. Ajuste de la El sistema es compatible con la visualización de números de piso en visualización de combinaciones de números y letras, que cumple con los requisitos de las número de piso condiciones especiales. Juicio de la señal de cortina de luz Si la puerta está bloqueada por materia durante el cierre de la puerta, la cortina de luz funciona y el ascensor abre la puerta. Esta función no es válida en el estado de emergencia de incendio. Caja auxiliar de Una caja opcional de operación auxiliar que tiene las mismas funciones que la operación caja principal de operación está disponible. Control independiente de Cuando hay dos puertas para un coche, el control automático de las dos puertas la puerta delantera depende de sus necesidades. y la puerta trasera Cierre repetido de la puerta Comando independiente Aviso de voz Auto-nivelación Si la cerradura de la puerta no se aplica después de que el ascensor lleve a cabo el cierre de la puerta durante un cierto tiempo, el ascensor abre automáticamente la puerta y luego cierra la puerta de nuevo Cuando las cajas principales y auxiliares de operación están configurados, pueden controlar de forma independiente la apertura / cierre de puerta de acuerdo a los comandos en el estado de funcionamiento automático. El ascensor anuncia automáticamente información tal como la dirección de marcha y el siguiente piso de llegada durante la marcha. Los sistemas implementan la nivelación automática y precisa basado en el conteo de pulso de piso y retroalimentación de señales de nivelación arriba / abajo. Respuesta en El sistema permite que el ascensor responda automáticamente a las llamadas aceleración de los pisos de servicio durante la aceleración. Control de selectivo colectivo abajo En funcionamiento automático o estado de operador, el ascensor sólo responde a las llamadas de piso de abajo y llamadas de cabina. Regreso a piso de En el estado de funcionamiento automático, el ascensor vuelve base de ascensor automáticamente al piso de aparcamiento configurado y espera a los pasajeros desocupado si no hay llamada de cabina o de piso dentro del tiempo establecido. Si el tiempo de apertura de la puerta supera el tiempo de protección de la Aterrizaje en un apertura de la puerta, pero la señal de límite de apertura de la puerta aún está otro piso inactiva, el ascensor cierra la puerta y luego conduce de forma automática al siguiente piso de aterrizaje. El sistema avisa falta Err55. Cuando la puerta no se cierra dentro del tiempo establecido debido a la acción Forced door close de la cortina de luz o borde de seguridad, el ascensor entra en el estado de cierre forzado de la puerta, cierra la puerta lentamente, y da un tono pronto. Cancelación de lamadas equivocadas Los pasajeros pueden presionar el botón consecutivamente dos veces para cancelar llamadas equivocadas. Ajuste de pisos de Puede activar o desactivar el sistema de servicio para ciertos pisos de forma servicio flexible en base a las necesidades reales. Servicio de piso Puede ajustar con flexibilidad los períodos de tiempo y pisos de servicio basado en el correspondientes o seleccionar los pisos de servicio mediante el interruptor de tiempo conmutación de piso el servicio. Funcionamiento independiente El ascensor no responde a ninguna llamada, y la puerta debe cerrarse manualmente. En el caso de control de grupo, el ascensor funciona independientemente fuera del sistema de control de grupo. Funcionamiento En el estado de asistente, el funcionamiento del ascensor es controlado por el de asistente asistente. Cuando el ascensor se encuentra en estado de no-inspección y se detiene en el Auto-rescate de área no-nivelación, el ascensor conduce automáticamente al área de nivelación baja velocidad a baja velocidad si se cumplen los requisitos de seguridad, y luego se abre la puerta. Función de control Puede establecer si el sistema sigue emitiendo comandos tras el límite de la de la puerta apertura y el cierre de la puerta basado en el tipo de la máquina de la puerta. Gong de llegada de cabina Indicador de piso de pronóstico de llegada Después de que el ascensor llega al piso de destino, el CTB da un tono pronto. Cuando el ascensor va a llegar al piso de destino pronto, el indicador de piso de pronóstico de llegada se convierte en ON. Gong de llegada Cuando el ascensor va a llegar al piso de destino pronto, el sistema emite la de piso señal al gong de llegada de piso. Función de extensión de E/S de piso Función de extensión de E/S de coche Si los terminales E / S de piso no son suficientes, mediante el uso de un tablero de HCB-B más terminales pueden ser proporcionados . Si los terminales E / S de coche no son suficientes, mediante el uso de un tablero de HCB-B más terminales pueden ser proporcionados . El sistema puede identificar automáticamente si un botón de llamada de piso se Verificación de ha quedado pegado y cancelar la llamada del pegado para prevenir que el pega de botón ascensor no se puede cerrar y funcionar debido a la llamada del botón pegado de piso. Compensación El sistema efectúa automáticamente la compensación de par de arranque de automática de par acuerdo con la carga actual del coche para lograr un arranque suave y mejorar de arranque la comodidad de la marcha. El sistema calcula automáticamente y genera las curvas de conducción de Parada directa acuerdo con la distancia, lo que permite el ascensor detener directamente en la posición de nivelación sin deslizamiento. Generación El sistema calcula automáticamente la curva de velocidad óptima compatible automática de la con el principio de función de hombre-máquina basado en la distancia, sin verse curva óptima limitado por el número de curvas o piso corto. Producción de Cuando el ascensor no puede responder a llamadas de piso, el terminal correspondiente emite la señal de suspensión de servicio. Registro de veces En el estado de funcionamiento automático, el sistema registra automáticamente de funcionamiento las veces de funcionamiento del ascensor. Registro de tiempo de funcionamiento Automatic door open upon door lock abnormality Servicio de VIP El sistema registra automáticamente el tiempo acumulativo de encendido, las horas de trabajo y días de trabajo del elevador. Si el sistema detecta que el circuito de cerratura de la puerta es anormal durante apertura / cierre de la puerta, el ascensor abre y cierra automáticamente la puerta de nuevo, e informa un fallo después de que las veces establecidas para la apertura/cierre de la puerta alcancen. The elevator first directly runs to the VIP floor and provides services for special persons. Ascensor El ascensor especificado prefiere responder a las llamadas de los suelos especificado especificados. preferido Cuando el ascensor está a la espera en la posición de nivelación, si hay una Servicio de llamada en este piso de la caja de operación de la discapacidad, se prolonga el discapacidad tiempo de retención de la apertura de la puerta . Es lo mismo con la puerta de atrás. Cuando el coche está completamente cargado en estado de funcionamiento Marcha directa a plena carga automático, el ascensor no responde a las llamadas de los pisos que pasa. Estas llamadas de piso, sin embargo, todavía pueden ser registradas, y será ejecutadas en la próxima vez de funciomamiento (en el caso de un solo ascensor) o por otro ascensor (en el caso del grupo control). Protección de Cuando la carga de la cabina exceda la carga nominal del ascensor, el ascensor sobrecarga alarma y deja de funcionar. Registro de dato El sistema registra automáticamente la información detallada de fallas, lo que de fallas ayuda a mejorar la eficiencia del mantenimiento y reparación. Funciones relacionadas con la inspección Teclado sencillo de mantenimiento Puesta en servicio de caja de operación El teclado de 3 botones en el MCB proporciona las funciones tales como la puesta puesta en servicio de los pisos de funcionamiento y apertura y cerratura de la puerta. El operador de LCD se puede conectar al sistema en el coche para la puesta en servicio del ascensor, lo que mejora la eficiencia de la puesta en marcha. El auto-ajuste de ducto se necesita antes de la primera vez de funicnamiento Auto-ajuste de automático. Durante el auto-ajuste de ducto, el ascensor va desde el primer piso ducto al último piso a la velocidad de inspección y registra automáticamente todas las señales de posición en el ducto. Visualización de los parámetros Puede ver los parámetros que se han modificados y diferentes a la configuración definidos por el predeterminada. usuario Después de entrar en el estado de inspección, el sistema cancela el Funcionamiento funcionamiento automático y las operaciones relacionadas. Puede pulsar el de inspección botón de llamada hacia arriba o hacia abajo para hacer el ascensor conducir a la velocidad de inspección. Auto ajuste de Con el ajuste sencillo de parámetros, el sistema puede obtener los parámetros motor del motor sin importar si el motor es con carga o sin carga. Corrección inteligente de la posición de piso Cada vez que el ascensor corre al piso terminal, el sistema comprueba y corrige automáticamente la información de posición de la cabina de auerdo con el interruptor de desaceleración 1, y elimina el recorrido extra del terminal superior o inferior con el uso de los interruptores de deceleración. Teniendo en cuenta la inspección a alta velocidad pero del control de Inspección de funcionamiento inexacto o inspección a baja velocidad de largo tiempo de doble velocidad funcionamiento, el sistema proporciona la curva de doble velocidad para la inspección, lo que mejora considerablemente la eficiencia en la inspección. La prueba de funcionamiento incluye la prueba de fatiga de un nuevo ascensor, Prueba de funcionamiento prueba de piso de llamada de cabina, prueba de llamada de piso, y las pruebas tales como la respuesta prohibida de llamadas de piso, apertura / cerratura pronibidas de puerta, interruptor de límite blindado de piso terminal, y señal blindado de sobrecarga. Funciones de seguridad y emergencia de incendio Regreso a piso de base en emergencia de incendio Funcionamiento Después de recibir una señal de emergencia de incendio, el ascensor no responde a ninguna llamada, pero va directamente a la planta de emergencia contra incendios y espera. Después de que el ascensor entra en el modo de funcionamiento de bombero, la de bombero apertura/cerratura de la puerta se realiza mediante la operación de desplazamiento (opcional) mediante el uso de los botones de abrir y cerrar la puerta en lugar de forma automática. Además, el ascensor sólo responde a las llamadas de cabina y una llamada sólo puede ser registrado una vez. Después de que la función de seguridad de piso esté habilitada, el piso de Piso de seguridad seguridad se utiliza a las 10:00 pm a 6:00 am, y el ascensor va primero al piso de seguridad cada vez, se detiene y abre la puerta, y luego se dirige a la planta de destino. En el estado de funcionamiento automático, cuando el interruptor de cerradura Función de cerrar de ascensor acciona o el tiempo establecido de elevador se alcanza, el el ascensor ascensor cancela todas las llamadas registradas, regresa al piso de cerradura del elevador, deja de funcionar y apaga la lámpara y el ventilador en el coche. Solución de problemas basada Los fallos se clasifican en diferentes niveles de acuerdo con la gravedad. en el nivel de Diferentes niveles de fallos se rectifican por el uso de diferentes métodos. fallos Prevención de la escapada Identificación automática de fallo de alimentación El sistema detecta el estado de funcionamiento del ascensor en tiempo real. Si la velocidad del ascensor supera el límite, el sistema detiene inmediatamente la marcha del ascensor. El sistema identifica automáticamente fallo de energía y emite la señal de conmutación automática de relé de la evacuación de emergencia para implementar la evacuación de emergencia en el corte del suministro eléctrico. Para el motor sincrónico, cuando se interrumpe el suministro eléctrico, el sistema puede realizar la conmutación automática entre el modo de frenado del Conmutación estator de cortocircuito y el modo de accionamiento del controlador para automática de conseguir un auto-rescate rápido y estable. modo de funcionamiento a El modo de frenado del estator de cortocircuito: En caso de fallo de energía, corte de energía UPS se utiliza, el estator del motor está en cortocircuito, y el freno se acciona automáticamente, haciendo que el coche se mueva lentamente bajo el efecto de la diferencia de peso de entre la cabina y el contrapeso. Autoidentificación de dirección de marcha a corte de energía Verificación de piso de base Descarga de pasajeros Juicio de grado de interferencia Cuando se interrumpe el suministro eléctrico, el sistema puede identificar automáticamente la carga de coche actual y determinar el dirección de la marcha. Después de detectar una anormalidad de posición, el sistema conduce el ascensor a cada piso hasta alcanzar el piso terminal para la verificación, garantizando la seguridad del sistema. El sistema determina automáticamente el nivel de fallo. Si se cumplen las condiciones de seguridad de marcha, el ascensor marcha primero a la posición de nivelación para descargar pasajeros. El sistema juzga el grado de interferencia en la comunicación. Cuando el dispositivo de detección de terremoto actúa e introduce una señal al Protección contra sistema, el ascensor aterriza en el piso más cercano y deja de funcionar. terremotos Después de que la señal de terremoto se desactive y el fallo se restaure manualmente, el ascensor devulve al funcionamiento normal. Cancelación de Para el PMSM, después de que el ascensor desacelere hasta parar, la corriente corriente en el de mantenimiento del motor se cancela en modo de rampa, con el objetivo de modo de rampa evitar ruido anormal durante la cancelación de la corriente. Independiente El sistema NICE3000new no sólo apoya trifásico 380 VAC, sino también trabajo de fuente monofásico 220 V CA para satisfacer las diferentes aplicaciones del sistema de de alimentación suministro de energía (por ejemplo, 220 V UPS) Identificación El sistema detecta el voltaje de bus y ajusta automáticamente la velocidad de automática de funcionamiento del ascensor para adaptarse a la situación de una alimentación voltaje insuficiente de la fuente de alimentación (por ejemplo UPS de emergencia). Control de grupo /Paralelo y otras funciones El sistema admite el control paralelo de dos ascensores y proporciona múltiples Control paralelo algoritmos de planificación para satisfacer las necesidades de los distintos clientes. Espera dispersa Salida de control paralelo / de Grupo En control paralelo, los ascensores pueden esperar en diferentes pisos. If the parallel/group control exit switch of a certain elevator in a parallel/group control system is valid or the time for exiting the parallel/group control is reached, the elevator exits parallel/group control and runs independently. This does not affect normal running of the parallel/group control system. Si un ascensor en el sistema de control paralelo / de grupo no puede responder Salida automática a las llamadas a tiempo a causa de los fallos, el ascensor sale automáticamente de Control del sistema de control paralelo / de grupo y funciona de forma independiente. paralelo / de grupo Esto no afecta al funcionamiento normal del sistema de control paralelo / de group. El sistema juzga automáticamente el número de pasajeros en el coche y lo Función de anti-molestia compara con el número de llamadas de cabina registradas. Si hay exceso de llamadas de cabina, el sistema determina que es molestia y cancela todas las llamadas de cabina. En este caso, los pasajeros tienen que registrar las llamadas de cabina correctas de nuevo. Aviso de parada El sistema da un aviso cuando el ascensor se detiene en un área de la zona en zona sin-puerta sin-puerta debido a fallas. Indicación de carga completa Cuando el ascensor está completamente cargado, una indicación de plena carga se muestra en los HCBs y el ascensor va directamente a los pisos deseados. Interfaz para la El sistema proporciona una interfaz para la gestión residencial inteligente para gestión residencial realizar el monitoreo remoto del estado de los ascensores en un barrio inteligente residencial. Copia de Puede convenientemente cargar y descargar parámetros del sistema mediante parámetros el operador LCD. Funciones de ahorro de energía Ahorro de energía Si no hay un mandato de funcionamiento en el tiempo configurado, el sistema de coche corta automáticamente el suministro de energía a la lámpara y el ventilador en el coche. Funcionamiento de ahorro de energía con la Cuando se interrumpe el suministro de energía normal y se utiliza la fuente de fuente de alimentación de emergencia, el sistema reduce la velocidad de marcha del alimentación en ascensor en el requisito previo de garantizar la curva de una marcha suave. espera Gong de llegada desactivado en la Dentro del período de tiempo establecido, el gong de llegada está desactivado. noche Ahorro de energía Después de que la lámpara del coche esté apagada, el sistema no emitirá la de la máquina de orden de cierre de la puerta, lo que reduce el consumo de energía de la máquina la puerta inactiva de la puerta. 4. Funciones opcionales Función Descripción Nota Después de aterrizar en un piso, el ascensor puede mover hacia arriba o hacia abajo debido al cambio de la carga y la puerta del coche no está alineada con el Micro-leveling suelo, lo cual es inconveniente para pasajeros y MCTC-SCB mercancías a entrar y salir. En este caso, el sistema necesario permite que el ascensor marche a la posición de nivelación en el estado de la puerta abierta a la velocidad de nivelación. Evacuación de Para el ascensor configurado con UPS, el sistema utiliza emergencia en corte de el UPS para realizar el auto-rescate a baja velocidad en alimentación el caso de fallo de alimentación. Puesta en servicio en las instalaciones El sistema puede controlar y supervisar el funcionamiento de los ascensores mediante el software NEMS. El sistema de control puede conectarse a la terminal en Monitoreo residencial la sala de control. Mediante el uso del software de NEMS, puede ver la posición de piso, dirección de marcha y estado de fallo del ascensor. UPS necesario NEMS software necesario NEMS y accesorios necesarios El sistema de control puede conectarse a la terminal (por Monitorización remota ejemplo PC) en la sala de control. Mediante el uso de MCTC-MIB software de NEMS, puede ver la posición de piso, necesario dirección de marcha y estado de fallo del ascensor. Pre-apertura de puerta Durante la parada normal, cuando la velocidad del MCTC-SCB ascensor es inferior a 0,2 m / s, y la señal de zona de necesario puerta está activa, el sistema pone en cortocircuito la cerradura de la puerta por medio del contactor de cortocircuito de circuito de bloqueo y emite la señal de abrir la puerta para realizar la preapertura de la puerta. Esto mejora la eficiencia del uso del ascensor. tarjeta de IC Los pasajeros pueden usar una tarjeta IC para ir a los IC card pisos que requieren autorización. necesario Capítulo 1 Información de seguridad y precauciones En este manual, los avisos se clasifican de acuerdo con el grado de peligrosidad: indica que el incumplimiento de la convocatoria dará lugar a lesiones graves o incluso la muerte. indica que el incumplimiento de la convocatoria dará lugar a un riesgo potencial de lesiones graves a personas o incluso la muerte. indica que el incumplimiento de la convocatoria dará lugar a lesiones leves o moderadas a personas o daños al equipo .. Adicionalmente, aparece en otros capítulos indica que es posible suceder un evento o situación no deseada si la notificación no se cumple. Las notificaciones en este manual que hay que observar están dirigidas a garantizar su seguridad personal, así como para evitar daños en el controlador o las partes conectadas. Lea atentamente este manual para que usted tenga una comprensión completa y realizar todas las operaciones siguiendo las notificaciones en este capítulo. Monarch asumirá ninguna responsabilidad por cualquier daño o pérdida causada por una operación inadecuada. 1.1 Precauciones de seguridad Grado Etapa de de uso segurida Precauciones d Este controlador tiene un alto voltaje peligroso y el motor es controlado por un dispositivo giratorio peligroso. El incumplimiento de las notificaciones puede resultar en lesiones personales o daños a la propiedad. Transporte, instalación, operación y mantenimiento del controlador se pueden realizar únicamente por personales cualificados después de que se familiaricen con la información de seguridad en este Alarmas manual. Este es el requisito previo de funcionamiento seguro y estable de los equipos. No abra la cubierta delantera ni toque los terminales de alimentación del circuito principal dentro de 10 minutos después de que el controlador está apagado. El condensador en el circuito de DC sigue teniendo alta tensión residual incluso después de ser apagado. El incumplimiento dará lugar a una descarga eléctrica. No instale el equipo en caso de que encuentre la filtración de agua, componentes que faltan o daño al desembalajar. No instale el equipo en caso de que la lista de embalaje no se conforme con el producto recibido. Instale el equipo en los objetos incombustibles como el metal, y manténgalo alejado de materiales combustibles. El incumplimiento puede resultar en un incendio. No afloje los tornillos fijos de los componentes, especialmente los tornillos con la marca roja Durante la No instale el controlador en las partes que vibran. El incumplimiento puede resultar en daños al equipo o accidentes inesperados. instalación Trata el equipo con cuidado durante el transporte para evitar daños en el equipo. No deje caer el extremo del cable o tornillo en el controlador. El incumplimiento dará lugar a daños en el controlador. No utilice el equipo con los componentes dañados o faltantes. El incumplimiento dará lugar a lesiones personales. No toque los componentes con las manos. El incumplimiento dará lugar a daños por electricidad estática. Instale el controlador en lugares libres de la vibración y la luz solar directa. El cableado debe ser realizado únicamente por personals calificadas bajo las instrucciones descritas en este manual. El incumplimiento puede resultar en accidentes inesperados. Debe utilizar un disyuntor de circuito para aislar la fuente de alimentación y el controlador. El incumplimiento puede resultar en un incendio. 1.2 Precauciones generales 1. Requisito en el dispositivo de corriente residua (RCD, residual current device) El variador de AC genera alta corriente de fuga durante el funcionamiento, que fluye a través del conductor de protección a tierra. Por lo tanto instalar un RCD de tipo B en el lado primario de la fuente de alimentación. Al seleccionar el RCD, debe considerar la corriente de fuga transitoria o estacionaria a tierra que se puede generar en el arranque y durante el funcionamiento del variador de AC.Puede seleccionar un RCD especializado con la función de supresión de armónicos agudos o un RCD de propósito general con relativamente grande corriente residual. 2. Alarma de alta fuga de corriente El controlador genera alta corriente de fuga durante el funcionamiento, que fluye a través del conductor de protección a tierra. La conexión a tierra debe hacerse antes de la conexión de la fuente de alimentación. Conexión a tierra debe cumplir con los reglamentos locales y las normas de IEC relacionadas. 3. Prueba de aislamiento del motor Realice la prueba de aislamiento cuando utiliza el motor por primera vez, o cuando vuelve a utilizarlo después de haber sido almacenado durante mucho tiempo, o en una revisión regular, con el fin de evitar que el mal aislamiento de los devanados del motor dañe el controlador. El motor debe estar desconectado del controlador durante la prueba de aislamiento. Se recomienda un ohmímetro de 500V para la prueba. Asegúrese de que la resistencia de aislamiento no es inferior a 5 MΩ. 4. Protección térmica del motor Si la capacidad nominal del motor seleccionado no coincide con la del controlador, especialmente cuando la potencia nominal del controlador es mayor que la del motor, ajuste los parámetros de protección de motor en el panel de operación del controlador o instalar un relé térmico para el circuito del motor para la protección. 5. Calor y ruido de motor La salida del controlador es onda de modulación por ancho de pulsos (PWM, pulse width modulation) con cierta onda armónica, y por lo tanto, el aumento de temperatura del motor, el ruido y la vibración son ligeramente mayores que aquellos en que funciona con la frecuencia de potencia (50 Hz). 6. Dispositivo sensible al voltaje o condensador en el lado de salida del controlador El controlador emite ondas de PWM, y por lo tanto, no instale el condensador para la mejora del factor de potencia o resistor sensible al voltaje de protección contra rayos en el lado de salida del controlador. De lo contrario, el controlador puede sufrir sobrecorriente transitoria o incluso ser dañado. 7. Contactor en los lados de entrada y de salida del controlador Cuando se instala un contactor entre el lado de entrada del controlador y la fuente de alimentación, el controlador no debe ser iniciado o detenido por medio de abrir o cerrar el contactor. Cuando se instala un contactor entre el lado de salida del controlador y el motor, no abra o cierre el contactor cuando el controlador tiene salida. De lo contrario, los módulos dentro del controlador pueden ser dañados. 8. Uso fuera del voltaje nominal El controlador no debe ser utilizado fuera del rango permitido de voltaje especificado en este manual. De lo contrario, los componentes dentro del controlador pueden ser dañados. Si es necesario, utilice un correspondiente dispositivo para aumentar o reducir el voltaje. 9. Supresor de sobrevoltaje El controlador tiene un resistor integrado dependiente de la tensión (VDR, voltage dependent resistor) para suprimir la sobretensión generada cuando las cargas inductivas (contactor electromagnético, relés electromagnéticos, válvulas de solenoide, bobina electromagnética y freno electromagnético) alrededor del controlador se encienden o se apagan. Si las cargas inductivas generan muy altos picos de tensión, utilice un supresor de sobretensiones para la carga inductiva o también utilice un diodo. No conecte el supresor de sobretensiones en el lado de salida del controlador. 10. Altitud y la disminución de potencia En los lugares donde la altitud es superior a 1000 m, y el efecto de enfriamiento disminuye debido al aire fino, es necesario subdimensionar el controlador. Póngase en contacto con Monarch para soporte técnico. 11. Motor adaptable El controlador se puede adaptar a motor asincrónico de tipo jaula de ardilla o AC PMSM. Seleccione un controlador adecuado según placa motor. Los parámetros por defecto configurados dentro del controlador son parámetros de motores asíncronos de jaula de ardilla. Todavía es necesario realizar el autoajuste del motor o modificar los valores predeterminados en función de las condiciones reales. De lo contrario, el efecto de funcionamiento y rendimiento de la protección se verán afectados. Para PMSM, debe llevarse a cabo el autoajuste del motor. 12. Precauciones sobre la selección de interruptor de circuito de corriente residual (RCCB, residual-current circuit breaker) Disparo puede ser causado si se selecciona un RCCB incorrecta cuando el controlador acciona el motor. Esto se debe a que la onda de salida del controlador tiene armónicos altos y el cable del motor y el cable que conecta el controlador y el motor produzcan la corriente de fuga, que es mucho mayor que la corriente cuando el motor funciona a la frecuencia de alimentación (50 Hz). Por lo tanto, es necesario determinar la sensibilidad adecuadac de RCCB basado en la corriente de fuga general de los cables y el motor. La corriente de fuga depende de la capacidad del motor, longitud del cable, aislamiento clase y método de cableado. Generalmente, la corriente de fuga en el lado de salida del controlador es tres veces de la corriente cuando el motor funciona a la frecuencia de alimentación (50 Hz). 1.3 Funciones de Protección Adoptando diferentes funciones de protección para los diferentes niveles de fallos, el NICE3000new ofrece el sistema de funcionamiento de ascensor con una protección completa contra anormalidad. Para soluciones detalladas a los fallos, véase el capítulo 8. Fallos del controlador se clasifican a continuación: 1) Velocidad anormal El controlador supervisa la velocidad de realimentación de encoder y el par de salida. Una vez que la velocidad de realimentación supera el límite o la desviación entre el límite de par y la realimentación de velocidad es demasiado grande, el controlador realiza la protección de inmediato, informa de una alarma y prohíbe funcionar. 2) Control de accionamiento anormal Los fallos relacionados incluyen sobrecorriente de variador, sobretensión / subtensión, pérdida de fase de entrada/ salida de alimentación , sobrecarga, y la anormalidad de almacenamiento. Si se produce un fallo de este tipo, el controlador realiza la protección de inmediato, detenga la salida, aplica el freno y prohíbe funcionar. 3) Encoder anormal Los fallos relacionados incluyen la pérdida de fase del codificador, la inversión de dirección, ruptura de cable , y la interferencia del pulso. Si se produce un fallo de este tipo, el controlador realiza la protección de inmediato para evitar accidentes inesperados. Si la interferencia de impulso es grande, el controlador informa de una alarma de inmediato. Si la interferencia de impulso es pequeña, el controlador realiza la corrección de posición cada vez que recibe una señal de nivelación y elimina el error acumulativo. 4) Sensor de nivelación anormal 5) Los fallos relacionados incluyen fallo del sensor o sensor pegado. El controlador juzga si se produce un fallo de acuerdo con el cambio de la señal de nivelación. Si la señal de nivelación no cambia en el tiempo configurado, el sistema informa de una alarma. Datos de piso anormales El sistema guarda la información de piso a través del autoajuste del ducto. Si los datos de piso son anormales, el sistema indica la información del fallo en la primera vez de funcionamiento. Durante el funcionamiento real, el controlador compara continuamente la entrada de información de posición de DI con los datos guardados de piso. Si la desviación es grande, el sistema informa de una alarma. Capítulo 2 Información de producto 2.1 Configuración de sistema de NICE3000new El sistema de control del ascensor integrado, serie NICE3000new combina las funciones de controlador de ascensor y el variador vectorial de alto rendimiento. Incluye principalmente el controlador integrado de ascensor, tablero superior del coche (MCTC-CTB), tabla de llamadas de piso (MCTC-HCB), tabla de llamadas de cabina (MCTC-CCB), y el módulo opcional de preapertura de puerta y el sistema de monitoreo remoto. La siguiente figura muestra los componentes del sistema. Figura 2-1 Componentes del sistema del NICE3000new 1. Controla el motor en base a señales de retroalimentación del codificador, y registra la información de cada interruptor de posición en el ducto por el impulso para conseguir una nivelación exacta y marcha directa y garantizar la seguridad de funcionamiento. 2. Realiza la coleccción y control de los componentes relacionados con el coche por medio de la comunicación de CANbus con el MCTC-CTB. 3. Registra y muestra las llamadas de sala de todos los pisos con ajuste fácil de la dirección por medios de comunicación de Modbus con el MCTC-HCB. La siguiente figura muestra la estructura del sistema de la NICE3000new. Figura 2-2 Estructura del sistema del NICE3000new 2.2 Reglas de designación y Descripción del modelo 2.2.1 Reglas de designación y la placa de identificación Figura 2-3 Reglas de designación y la placa de identificación del NICE3000new 2.3 Modelos y Especificaciones Tabla 2-1 NICE3000new modelos and especificaciones Modelo de controlador Capacidad de Corriente de Corriente de Potencia del Alimentación(K entrada (A) salida (A) motor(kW) VA) Monofásico 220 V, gama: 200−240 V NICE-L-C-2002 2.3 13.2 5.2 1.1 NICE-L-C-2003 3.4 17 7.5 1.5 220-NICE-L-C-4007 9.8 29 10.3 2.2 220-NICE-L-C-4011 12.1 36 15.5 3.7 220-NICE-L-C-4015 13.9 41 19 4.0 220-NICE-L-C-4018 17.3 40 22.5 5.5 220-NICE-L-C-4022 23.1 49 27.7 11 220-NICE-L-C-4030 33 61 34.6 15 Trifásico 220 V, gama: 200−240 V NICE-L-C-2002 4.0 11.0 9.6 2.2 NICE-L-C-2003 5.9 17.0 14.0 3.7 220-NICE-L-C-4007 17.0 29.0 18.0 4.0 220-NICE-L-C-4011 21.0 36.0 27.0 5.5 220-NICE-L-C-4015 24.0 41.0 33.0 7.5 220-NICE-L-C-4018 30.0 40.0 39.0 11.0 220-NICE-L-C-4022 40.0 49.0 48.0 15.0 220-NICE-L-C-4030 57.0 61.0 60.0 18.5 Trifásico 380 V, gama: 380−440 V NICE-L-C-4002 4.0 6.5 5.1 2.2 NICE-L-C-4003 5.9 10.5 9.0 3.7 NICE-L-C-4005 8.9 14.8 13.0 5.5 NICE-L-C-4007 11.0 20.5 18.0 7.5 NICE-L-C-4011 17.0 29.0 27.0 11.0 NICE-L-C-4015 21.0 36.0 33.0 15.0 NICE-L-C-4018 24.0 41.0 39.0 18.5 NICE-L-C-4022 30.0 49.5 48.0 22.0 NICE-L-C-4030 40.0 62.0 60.0 30.0 NICE-L-C-4037 57.0 77.0 75.0 37.0 NICE-L-C-4045 69.0 93.0 91.0 45.0 NICE-L-C-4055 85.0 113.0 112.0 55.0 NICE-L-C-4075 114.0 157.5 150.0 75.0 NICE-L-C-4090 134.0 180.0 176.0 90.0 NICE-L-C-4110 160.0 214.0 210.0 110.0 NICE-L-C-4132 192.0 256.0 253.0 132.0 NICE-L-C-4160 231.0 307.0 304.0 160.0 1.En términos de monofásico y trifásico 220 VAC, NICE-LA/B-2002 y NICE-LA/B-2003 están especialmente diseñados para 220 VAC. Los otros modelos que se marcan con el prefijo "220 -" se modifican a partir de los modelos trifásicosde de 380 VCA. 2. Los mismos modelos están disponibles para monofásico de 220 VCA y trifásico de 220 V CA. Preste atención a la clase de potencia del motor adaptable durante el uso. 3. Seleccione la corriente de salida del controlador adecuado en base a la corriente nominal del motor. Asegúrese de que la corriente de de salida del controlador es igual o mayor que la corriente nominal del motor. 4. Si necesita un mayor voltaje o clase de potencia, póngase en contacto con Monarch. 2.4 Especificaciones técnicas Tabla 2-2 Especificaciones técnicas del NICE3000new Artículo Especificaciones Frecuencia máxima 99 Hz Frecuencia de la 2–16 kHz, ajusta automáticamente en función de las portadora características de carga Modo de control del motor Par de arranque El control vectorial de flujo en lazo abierto(SFVC) El control vectorial de flujo en lazo cerrado (CLVC) Voltaje/Frequencia (V/F) control 0.5 Hz: 180% (SFVC) 0 Hz: 200% (CLVC) Precisión de estabilidad de la ±0.5% (SFVC) ±0.05% (CLVC) velocidad Precisión de control de par 60s para 150% de la corriente nominal, 1s para 200% de la Sobrecarga Especificacio nes básicas ±5% (CLVC) corriente nominal Auto-ajuste de motor Control de distancia Auto-ajuste con carga; Auto-ajuste sin carga Modo de marcha directa en el que la posición de nivelación se puede ajustar de forma flexible Curva de aceleración / N curvas se generan automáticamente deceleración Desaceleración Nueva función de decerelación fiable,identificando automáticamente la posición del soporte de desaceleración Auto-ajuste de Datos de 32 bits, registra las posiciones en el ducto de con ducto precisión Ajuste de nivelación Función flexible y fácil de ajuste de nivelación Compensación de par de arranque Compensión de pre-par de arranque con célula de carga auto-adaptación de pre-par de arranque con célula sin carga Reloj en tiempo real Reloj en tiempo real para el servicio de piso basado en el tiempo, el servicio de pico y de contraseña automática Easy to implement multiple elevators commissioning Función de prueba functions. Fácil de realizar la función de la puesta de servicio de múltiples ascensores. Protección de fallo Gestión inteligente Soluciones a diferentes niveles de fallas del ascensor Monitoreo remoto, gestión de usuarios, y el ajuste de control de grupo Comprobación de seguridad de los Comprobación de seguridad de los dispositivos periféricos, dispositivos tales como conexión a tierra y cortocircuito, tras el periféricos tras el encendido encendido Monitorización del estado de las señales de Monitor de estado retroalimentación para asegurar que el ascensor funciona correctamente 24 x DI Especificación de entrada: 24 V, 5 mA Entrada digital (DI) 3 terminales de entrada de detección de corriente de alta intensidad de circuito de seguridad y circuito de cierre de la puerta especificación de entrada: 95−125 V Característic a de E / S Entrada analógica(AI) AI (rango de tensión: –10 V to +10 V) Puerto de 2 puertos de comunicación de CANbus comunicación 1 puerto de comunicación de Modbus 6 salidas de relé Terminal de salida Los terminales pueden ser asignados con diferentes funciones. Interfaz del Compatible con diferentes codificadores utilizando una codificador tarjeta opcional de PG Pantalla LED de 5-dígitos, puede consultar / modificar la Panel de operación mayoría de los parámetros y supervisar el estado del Operación y sistema pantalla de 3-digit LED display, implementing certain commissioning LED Teclado functions Pantalla LED de 3-dígitos, puede realizar determinadas funciones de puesta de servicio Querying/modifying all parameters, uploading/downloading parameters and monitoring various status parameters of operador de LCD the system, including running curves Puede consultar / modificar todos los parámetros, y cargar / descargar parámetros y sepervisar diversos parámetros de estado del sistema, incluye las curvas de marcha Conecta el sistema de control y el ordenador servidor, Monitor de estado conveniente para consultar / supervisar el estado del sistema. Altitud Temperatura ambiente Medio ambiente Debajo de 1000 m (subdimensionar 1% para cada 100m más alto –10C a +40C (subdimensionar si la temperatura ambiente es superior a 40 º C, la temperatura máxima: 50 ° C) Humedad Humedad relativa máxima del 95%, sin condensación Vibración Vibración máxima: 5.9 m/s2 (10–55 Hz, 0.35 mm) Temperatura de almacenamiento Nivel IP Grado de contaminación –20C a +60C IP20 PD2 Sistema de distribución de TN , TT energía 2.5 Aspecto físico y dimensiones de montaje Las siguientes figuras muestran el aspecto físico y las dimensiones de montaje del NICE3000new. Figura 2-4 Aspecto físico del NICE3000new Figura 2-5 Dimensiones de montaje del NICE3000new Tabla 2-3 Dimensiones de montaje del NICE3000new Controller Model A B H W D (mm) (mm) (mm) (mm) (mm) Hole Gross Diameter Weight (mm) (kg) Size Single-phase 220 V, range: 200−240 V NICE-L-C-2002 NICE-L-C-2003 150 334.5 347 223 143 6.5 10 SIZE-C 150 334.5 347 223 173.5 6.5 12 SIZE-D 235 541.5 554.5 289.6 223 6.5 14.5 SIZE-E 220-NICE-L-C-4007 220-NICE-L-C-4011 220-NICE-L-C-4015 220-NICE-L-C-4018 220-NICE-L-C-4022 220-NICE-L-C-4030 Three-phase 220 V, range: 200−240 V NICE-L-C-2002 NICE-L-C-2003 150 334.5 347 223 143 6.5 10 SIZE-C 150 334.5 347 223 173.5 6.5 12 SIZE-D 235 541.5 554.5 289.6 223 6.5 14.5 SIZE-E 10 SIZE-C 220-NICE-L-C-4007 220-NICE-L-C-4011 220-NICE-L-C-4015 220-NICE-L-C-4018 220-NICE-L-C-4022 220-NICE-L-C-4030 Three-phase 380 V, range: 380−440 V NICE-L-C-4002 NICE-L-C-4003 NICE-L-C-4005 150 334.5 347 223 143 6.5 NICE-L-C-4007 NICE-L-C-4011 150 334.5 347 223 173.5 6.5 12 SIZE-D 235 541.5 554.5 289.6 223 6.5 14.5 SIZE-E 260 580 549 385 265 10 32 SIZE-F 343 678 660 473 307 10 47 SIZE-G 449 903 880 579 380 10 90 SIZE-H NICE-L-C-4015 NICE-L-C-4018 NICE-L-C-4022 NICE-L-C-4030 NICE-L-C-4037 NICE-L-C-4045 NICE-L-C-4055 NICE-L-C-4075 NICE-L-C-4090 NICE-L-C-4110 NICE-L-C-4132 NICE-L-C-4160 2.6 Optional Parts Si se requiere cualquier parte opcional en la siguiente tabla, indique en su orden. Tabla 2-4 Las partes opcionales del NICE3000new Nombre Modelo Función Marca Para más detalles, véase Unidad de frenado externo MDBUN Se proporciona para el NICE3000new de 37 kW y superiores. la sección 2.7 "Selección de Resistencia frenado". Se MCTC-PG-A2 utiliza para adaptarse a los codificadores incrementales de push-pull y de colector abierto. It is used to adapt to the UVW differential encoder and applied to synchronous motor. MCTC-PG-D Tarjeta de PG Se utiliza para adaptarse al codificador diferencialr de UVW y se aplica al motor síncrono. Requiere alimentación de 5 V. MCTC-PG-E MCTC-PG-F1 Tablero superior MCTC-CTB Se utiliza para adaptar al codificador de SIN / COS. - Se utiliza para adaptar al codificador absoluto (Heidenhain ECN413/1313) El MCTC-CTB es el tablero de control del - de Nombre Modelo Función Marca coche del NICE3000new. Cuenta con 8 del coche (CTB) DIs, 1 AI y 9 salidas de relé (7 como configuración estándar). Se puede comunicar con el CCB y HCB de forma simultánea. El HCB recibe las llamadas de pasajeros Tablero de y muestra el piso donde se encuentra el llamada de piso MCTC-HCB ascensor y la dirección de marcha. (HCB) También se puede utilizar como tablero de indicador de coche. Una cantidad de modelos de HCB están disponibles. Para más detalles, ver sección 3.3. El MCTC-CCB es otra interfaz para los Tablero de pasajeros para interactuar con el sistema llamada de MCTC-CCB de control. Recoge principalmente las coches (CCB) llamadas de cabina y emite el estado de indicador de llamada. Panel de control de LED externo Operador de LCD de mano Cable extensión de Ofrece MDKE la interfaz de Es un indicador de LED y panel de RJ45 para la conexión al operación externo. Es un indicador de LCD y panel de MDKE3 operación externo. MDCAB Es un cable estándar de red de 8-núcleo y se puede conectar a MDKE y MDKE3. controlador. Puede copiar los parámetros a través de este panel de operación La longitud del cable es 3m en la configuración estándar. 2.7 La selección de la resistencia de freno Los modelos de NICE3000new de 30 kW e inferiores tienen una unidad de frenado incorporado, y usted sólo tiene que conectar una resistencia de frenado externa entre el PB y terminales +. Para los modelos superiores a 30 kW, es necesario instalar una unidad de frenado y una resistencia de frenado de forma externa. Seleccione la resistencia de frenado basándose en la configuración que aparece en la siguiente tabla. Tabla 2-5 Selección de la resistencia de frenado para los modelos de NICE3000new Modelo del controlador Podencia Podencia Max. Min. de la del motor resistenci Resistanci resistenci adaptable a (Ω) a (Ω) a de freno (kW) (W) Unidad de freno Modelo del controlador Podencia Podencia Max. Min. de la del motor resistenci Resistanci resistenci adaptable a (Ω) a (Ω) a de freno (kW) (W) Unidad de freno Monofásico200–240 V NICE-L-C-2002 1.1 145.0 125.0 300 NICE-L-C-2003 1.5 105.0 90.0 450 220-NICE-L-C-4007 2.2 72.0 63.0 600 220-NICE-L-C-4011 3.7 43.0 37.0 1100 220-NICE-L-C-4015 4.0 40.0 35.0 1200 220-NICE-L-C-4018 5.5 29.0 25.0 1600 220-NICE-L-C-4022 11.0 18.0 16.0 3500 220-NICE-L-C-4030 15.0 13.0 13.0 4500 Incorporado Trifásico 200–240 V NICE-L-C-2002 2.2 72.0 65.0 600 NICE-L-C-2003 3.7 54.0 50.0 1100 220-NICE-L-C-4007 4.0 40.0 35.0 1200 220-NICE-L-C-4011 5.5 29.0 25.0 1600 220-NICE-L-C-4015 7.5 26.0 22.0 2500 220-NICE-L-C-4018 11.0 14.5 13.0 3500 220-NICE-L-C-4022 15.0 13.0 12.5 4500 220-NICE-L-C-4030 18.5 12.5 12.0 5500 Incorporado Trifásico 380–440 V NICE-L-C-4002 2.2 290 230 600 NICE-L-C-4003 3.7 170 135 1100 NICE-L-C-4005 5.5 115 90 1600 NICE-L-C-4007 7.5 85 65 2500 NICE-L-C-4011 11 55 43 3500 NICE-L-C-4015 15 43 35 4500 NICE-L-C-4018 18.5 34.0 25 5500 NICE-L-C-4022 22 24 22 6500 NICE-L-C-4030 30 20 16 9000 Incorporado Modelo del controlador Podencia Podencia Max. Min. de la del motor resistenci Resistanci resistenci adaptable a (Ω) a (Ω) a de freno (kW) (W) Unidad de freno NICE-L-C-4037 37 16.0 13 11000 MDBUN-45-T NICE-L-C-4045 45 14.0 11 13500 MDBUN-60-T NICE-L-C-4055 55 12.0 10 16500 MDBUN-60-T NICE-L-C-4075 75 16×2 13×2 12000×2 MDBUN-60-T×2 NICE-L-C-4090 90 14×2 13×2 13500×2 MDBUN-60-T×2 NICE-L-C-4110 110 12×2 9×2 18000×2 MDBUN-90-T×2 NICE-L-C-4132 132 13.5×3 10.5×3 14000×3 MDBUN-90-T×3 NICE-L-C-4160 160 12×3 9×3 18000×3 MDBUN-90-T×3 1. La configuración anterior tiene el motor síncrono como un ejemplo. El motor asíncrono tiene baja eficiencia de transferencia de energía, y puede reducir la potencia de la resistencia de frenado o aumentar la resistencia de la resistencia de frenado. 2. Se recomienda seleccionar la resistencia de freno más cercana a la máxima resistencia. 3.×2 significa que se requiere dos conjuntos de accesorios correspondientes, por ejemplo,en la selección de NICE-L-C-4110 “9×2,18000×2,MDBUN-90-T×2” significa que se requiere dos conjuntos de “resistenica de freno de (9Ω,18000W) + MDBUN-90-T” y se conectan en paralelo en el controlador. ×3 significa que los tres grupos se conectan en paralelo. Capítulo 3 Instalación mecánica y eléctrica 3.1 NICE3000new Controlador Integrado de ascensor 3.1.1 Requisitos del entorno de instalación Requisitos Ítem Temperatura ambiente -10C a 50C Instale el controlador en la superficie de un objeto incombustible, y Disipación de calor asegúrese de que haya espacio suficiente alrededor para la disipación del calor. Instale el controlador verticalmente en el soporte con los tornillos. Libre de la luz solar directa, alta humedad y condensación Lugar de instalación Libre de gases corrosivos, explosivos y combustibles Libre de la suciedad de aceite, polvo y polvo de metal. Vibración Menos de 0,6 g 3.1.2 Requisitos de espacio de instalación El espacio libre que debe ser reservado varía según la clase de potencia del NICE3000new, como se muestra en la siguiente figura. Figura 3-1 Espacio libre alrededor del NICE3000new para la instalación El NICE3000new se instala verticalmente hacia arriba sobre el soporte con tornillos fijos en los cuatro orificios de montaje, como se muestra en la siguiente figura. Figura 3-2 Diagrama de orificios de montaje El controlador se instala generalmente en el gabinete de control en la sala de máquina del ascensor. Preste atención a los siguientes puntos en el diseño de la cabina de control: 1. La temperatura dentro del gabinete no debe elevarse a 10C mayor que la temperatura fuera del gabinete. 2. Un gabinete de control cerrado debe configurarse con un ventilador (u otro dispositivo de enfriamiento por aire, como el aire acondicionado) para garantizar la circulación del aire. 3. El aire del ventilador no debe soplar directamente a la unidad de accionamiento, ya que esto causa fácilmente la adherencia del polvo o incluso fallo en la unidad de accionamiento. 4.Un respiradero debe estar disponible en la parte inferior del gabinete de control para formar el flujo de aire de abajo hacia arriba, lo que evita el efecto de isla de calor en la superficie de los componentes o efecto de conductividad térmica parcial. 5. Si el ventilador no puede satisfacer las necesidades de refrigeración, instale un acondicionador de aire en el gabinete o en la sala de máquina. Tenga en cuenta que la temperatura dentro del gabinete no debe ser demasiado baja; de lo contrario, se puede producir la condensación, provocando un cortocircuito de los componentes. 6. Para ambiente especial donde la temperatura es alta, pero no se puede reducir de manera efectiva. Subdimensione el controlador durante el uso. 3.1.3 Disposición de terminales y descripción de cableado Disposición de terminales La siguiente figura muestra la disposición de los terminales del NICE3000new. Figura 3-3 Disposición de terminales del NICE3000new Descripción de los terminales del circuito principal La siguiente figura muestra la disposición los terminales del circuito principal Figura 3-4 La disposición los terminales del circuito principal Figura 3-5 Cableado del circuito principal (Para los modelos inferiores a 37 kW)) (Para los modelos de 37kw y superior) Tabla 3-1Descripción de los terminales del circuito principal Terminale s Nombre Descripción Terminales de entrada de R, S, T alimentación de corriente Proporciona suministro de energía trifásica. trifásica (+), (-) Terminales positivos y negativos del DC bus Conecta los terminales (+), PB de la resistencia de frenado U, V, W Terminales de salida del controlador Terminal de tierra Conecta la unidad de frenado externa y unidad de realimentación de energía para los modelos de 37 kW o superior. Conecta la resistencia de frenado para los modelos inferiores a 37 kW. Conecta el motor trifásico. Debe ser conectado a tierra. Precauciones sobre el cableado de los terminales del circuito principal son los siguientes: Seleccione la resistencia de frenado de acuerdo con los valores recomendados en la tabla de selección de la resistencia de frenado. El circuito en el lado de salida no debe ser cortocircuitado o conectado a tierra. U, V, W cables del controlador debe pasar por el tubo de metal a tierra y ser puesto por separado o en posición vertical con el cable de señal del circuito de control. Si el cable del motor es demasiado largo, la resonancia eléctrica se genera debido al impacto de la capacitancia distribuida, por lo tanto daña el aislamiento del motor o genera alta corriente de fuga superior, haciendo que el controlador entre en la protección de sobrecorriente. Los requisitos para el cable de conexión a tierra son los siguientes: 1) La impedancia del cable / conductor de PE debe ser capaz de soportar la probable máxima corriente de cortocircuito cuando se produce un fallo. 2) Seleccione el tamaño del conductor de PE de acuerdo con la siguiente tabla. Min. Área de la sección Área de la sección transversal transversal del de un conductor de fase (S) conductor de protección (Sp) S ≤ 16 mm2 S 16 mm2 < S ≤ 35 mm2 16 mm2 35 mm2 < S S/2 3) Utilice un cable amarillo / verde como el conductor de protección. Descripción de los terminales del circuito de control Tabla 3-2 Descripción de los terminales del circuito de control Marc a Código Nombre del Descripción de terminal funciones CN1 X1~X16 DI Rango de voltaje de entrada: 10–30 VDC Impedancia de entrada: 4.7 kΩ X17~X2 4 Aislamiento del optoacoplador DI Límite de corriente de entrada: 5 mA CN9 Ajuste de funciones en F5-01 a F5-24 Se utiliza para el Ai/M AI dispositivo de la celda de carga analógica Suministro de Suministro de energía de energía externo 24 VDC para todo el de 24 V DC tablelo MOD+/ Señal diferencial Interfaz de comunicación - de RS485 de RS485 aislada 24V/C CN3 OM Disposición de terminales estándar , usado para llamada de piso e indicador CAN+/- Señal diferencial de CANbus Interfaz de comunicación de CANbus , comunicación con el CTB Rango de voltaje de entrada: 110 VAC±15% CN2 X25 to Terminal de Circuito de seguridad y X27/ detección de circuito de cierre de la XCM alto voltaje puerta, ajuste de funciones en F5-37 a F5-39 Normalmente abierto (NO), corriente máxima Y1/M1 CN7 to Salida de relé Y6/M6 y voltaje nominal 5 A, 250 VAC Ajuste de funciones en F5-26 a F5-31 Interfaz de comunicación CN4 CAN2+ Señal diferencial de CAN2, utilizado para /- de CAN2 el control de grupo o de control paralelo Se utiliza como la interfaz para el software de puesta de servicio y CN5 Interfaz de DB9 Interfaz de monitoreo de la célula, comunicación control paralelo de de RS232 RS232/RS485, y descarga de software para el MCB y panel de Unidad CN12 Interfaz Interfaz del de panel de RJ45 operación Se utiliza para conectar el operador de LED o LCD Terminal opcional de conexión a tierra for AI. Los pines J1 marcados con "ON" están conectados a la resistencia terminal.. Se utiliza para conectar la resistencia terminal para el J5 tablero de control de comunicaciones de CANbus; los pines marcados con "ON" están conectados a la resistencia terminal. Terminal de tierra del tablero de control. Si hay un J7 cortocircuito, la tierra del tablero de control está conectada a la tierra del controlador. J12 Interfaz para conectar la tarjeta de PG J9/J1 Reservado para fábrica. No los ponga en cortocircuito . 0 De lo contrario, el controlador no puede utilizarse - correctamente. Tabla 3-3 Descripción de los indicadores en el MCB Mark Terminal Name Indicador de COP comunicación de CAN1 Indicador de HOP comunicación de Modbus Indicador de CAN2 comunicación de control de grupo 232 Indicador de comunicación serial Function Description Cuando la comunicación entre el MCB y la CTB es normal, este indicador está encendido (en verde). Cuando la comunicación entre el MCB y el HCB es normal, este indicador está encendido (en verde). Este indicador es constante encendido (en verde) cuando la comunicación para el control paralelo o control de grupo es normal y parpadea cuando el funcionamiento en modo paralelo o en modo de grupo es normal. Este indicador está encendido (en verde) cuando la comunicación con el ordenador central o monitoreo de la célula/ monitoreo remoto es normal. X1 to Indicador de señal Este indicador se enciende cuando la entrada externa está X24 de entrada activa. Indicador de señal Este indicador se enciende cuando la salida del sistema está de salida activa. Y1 to Y6 3.2 Tablero de CTB (MCTC-CTB) 3.2.1 Dimensiones e instalación El tablero superior del coche (MCTC-CTB) es el tablero de control de la cabina de ascensor del NICE3000new.Se compone de 8 terminales DI, 1 terminal de AI, y 9 terminales de salida de relé (estándar: 7). Las siguientes figuras muestran la apariencia y estructura y el método de instalación de la CTB. Figura 3-6 Apariencia y estructura del CTB Figura 3-7 Método de la instalación del CTB (unidad: mm) 3.2.2 Cableado de los terminales de CTB Tabla 3-4 Descripción del cableado de los terminales de CTB Marca Nombre del terminal Alimentación +24V/COM externa de 24 V DC CN2 Interfaz de CAN+/CAN- comunicación de CANbus +24V/COM CN1 MOD+/MOD- Descripción de funciones Alimentación de 24 VDC para todo el CTB Conecta el MCB para la comunicación de CANbus Alimentación de Alimentación de 24 VDC para el 24 VDC HCB Comunicación de Conecta el HCB para la Modbus conmunicación de Modbus Entrada de señal CN6 Ai-M de la célula de carga 0–10 VDC Disposición de terminales Marca P24 Nombre del terminal Alimentación de 24 VDC X1 Cortina de luz 1 X2 Cortina de luz 2 Descripción de funciones Terminal común de DI Límite de X3 CN3 X4 X5 X6 X7 apertura de puerta 1 Terminal de DI Límite de 1. Aislamiento de fotoacoplador, apertura de entrada de la unipolaridad puerta 2 2. Impedancia de entrada: 3.3 Límite de cierre kΩ de puerta 1 Las señales del CTB están Límite de cierre de puerta 2 activas cuando hay alimentación de 24 VDC. Señal de plena carga (100%) Señal de X8 sobrecarga (110%) Señal de B1-BM apertura de puerta 1 B2-BM B3-BM Señal de cierre de puerta 1 Cierre forzado de puerta 1 Señal de C1-CM CN4 apertura de puerta 2 C2-CM C3-C3M D1-DM D2-DM Señal de cierre de puerta 2 Cierre forzado de puerta 2 Señal de llegada hacia arriba Señal de llegada de abajo Terminal de salida de relé Contact drive capacity Capacidad de accionamiento del contacto: 30 VDC, 1 A Disposición de terminales Marca Nombre del terminal Descripción de funciones Disposición de terminales A-AM (contacto de NC(normalmente CN5 cerrado)) B-AM (contacto de NO (normanmente Ventilador del coche y control de la lámpara Terminal de salida de relé Capacidad de accionamiento del contacto: 250 VAC, 3 A or 30 VDC, 1 A abierto)) DB9-pin puerto CN7/CN8 para la comunicación Conecta el CCB con el CCB CN10 Interfaz de RJ45 Conecta el panel de operación externo Ajustar direcciones de CTB: Ponga en cortocircuito OFF o no Saltador de J2 conecte el terminal para un solo dirección de CTB ascensor o el ascensor principal en control en control paralelo; Ponga en paralelo cortocircuito ON para el ascensor secundario en control paralelo. Este indicador parpadea cuando Indicador de CAN la comunicación entre el CTB y comunicación de el MCB es normal, y es estable CANbus cuando se produce un fallo de comunicación. Este indicador parpadea y el Indicador de fallo Reajuste (RESET) de comunicación de CANbus indicador de comunicación de CANbus es estable cuando se produce un fallo en la comunicación entre el CTB y el MCB. Este indicador está encendido X1 a X8 Indicador de DI (verde) cuando la entrada externa está activa. A1 a D2 Indicador de salida de relé Este indicador está encendido (verde) cuando la salida del sistema está activa. Reservado para fábrica. No los J9 Reservado ponga en cortocircuito . De lo contrario, el controlador no puede utilizarse correctamente. - Para evitar la interferencia externa en la comunicación, se recomienda utilizar el par trenzado apantallado como cables de comunicación y ponerlas en paralelo. Conecte los cables a los terminales de acuerdo con las marcas de terminales, y fije los cables. 3.3 Tablero de indicador (MCTC-HCB) Como un nexo importante entre los usuarios y el sistema de control, el MCTC-HCB recibe llamas de piso y muestra el piso actual y sentido de marcha para la sala. Este tablero se puede utilizar también como tablero de indicador de coche. Monarch provides many types of display boards. The following part describes only a few common types. If the types available cannot meet your requirements, you can use a parallel-serial conversion board to make the board provided match your own. For any further requirement, contact Monarch. Monarch ofrece muchos tipos de tableros. La siguiente parte describe solamente algunos tipos comunes. Si los tipos disponibles no pueden satisfacer sus necesidades, puede utilizar un tablero de conversión de paralelo-serial para que el tablero proporcionado coincide con el suyo propio. Para cualquier requisito futuro, póngase en contacto con Monarch. Los tipos comunes de ser descritos se enumeran en la tabla siguiente. Tabla 3-5 Tipos comunes de HCB Nombre HCB-H HCB-R1 HCB-D2 HCB-U1 HCB-V1 Característica Tablero de indicador de puntos(rojo) Tablero de indicador ultrafino de puntos (rojo) Tablero de indicador ultrafino de segmento de LCD(fondo azul letras en blanco) 4.3-inch Tablero de indicador de segmento de LCD(fondo azul letras en blanco) 6.4-inch Tablero de indicador de segmento de LCD (fondo azul letras en blanco) Tamaño (mm) 144 x 70 x 18 144 x 70 x 10 144 x 70 x 10 143.5 x 79.2 x 9.4 131 x 184.6 x 14.2 3.3.1 HCB-H (Tablero de indicador de puntos) La siguiente figura muestra el aspecto y las dimensiones del HCB-H. Figura 3-8 Aspecto y dimensiones del HCB-H La siguiente figura muestra el método de instalación de HCB-H. Figura 3-9 Método de la instalación del HCB-H En la siguiente tabla se describen los terminales de entrada y salida del HCB-H. Tabla 3-6 Terminales de entrada y salida de HCB-H Nombre del terminal Función Cableado del terminal Interfaz para el interruptor de cerradura del ascensor e indicador de llegada hacia arrriba JP1 Los pines 2 y 3 son para la entrada del interruptor. Los pines 1 y 4 son salida del indicador de llegada hacia arriba. (salida de 24 VDC, capacidad de carga: 40 mA). Interfaz para el interruptor de emergencia de incendio y el indicador de llegada hacia abajo JP2 Los pines 2 y 3 son para la entrada del interruptor. Los pines 1 y 4 son salida del indicador de llegada de abajo (salida de 24 VDC , capacidad de carga: 40 mA). Interfaz para el botón de llamada hacia arriba y el indicador JP3 Los pines 2 y 3 son para entrada de llamada hacia arriba. Los pines 1 y 4 son alimentación para el indicador de llamada hacia arriba (salida de 24 VDC, capacidad de carga: 40 mA). Interfaz para el botón de llamada hacia abajo y el indicador JP4 Los pines 2 y 3 son para la entrada de llamada hacia abajo. Los pines 1 y 4 son alimentación para el indicador de llamada hacia abajo (salida de 24 VDC, capacidad de carga: 40 mA). Botón para ajustar la dirección de pisos. Mantenga pulsado el botón para ajustar la S1 dirección de pisos(rango 0–56). Después de dejar de pulsar, el número de dirección parpadea tres veces y el ajuste es un éxito. Terminal de comunicación de Modbus y de alimentación CN1 Los pines 2 y 3 son para la comunicación de Modbus. Los pines 1 y 4 son para la alimentación de DC. 3.3.2 Tablero de indicador ultrafino de puntos (rojo) La siguiente figura muestra el aspecto y las dimensiones del HCB-R1. Figura 3-10 Aspecto y dimensiones de HCB-R1 La siguiente figura muestra el método de instalación del HCB-R1. Figure 3-11 Método de la instalación de HCB-R1 En la siguiente tabla se describen los terminales de entrada y de salida. Tabla 3-7 Terminales de entrada y salida del HCB-R1 Nombre del terminal Función Cableado del terminal Interfaz para el botón de llamada hacia arriba y el indicador Los pines 2 y 3 son para la entrada de UP llamada hacia arriba. Los pines 1 y 4 son alimentación para el indicador de llamada hacia arriba (salida de 24 VDC, capacidad de carga: 40 mA). Interfaz para el botón de llamada hacia abajo y el indicador Los pines 2 y 3 son para la entrada de DOWN llamada hacia abajo. Los pines 1 y 4 son alimentación para el indicador de llamada hacia abajo (salida de 24 VDC, capacidad de carga: 40 mA). Interfaz para la emergencia de incendio y interruptores de cerradura del ascensor. XF/ST Los pines 1 y 2 son para la entrada de emergencia de incendio. Los pines 3 y 4 son para la entrada de la cerratura del ascensor. Terminal para ajustar la dirección de pisos. Poner en cortocircuito a J1,y pulse el botón J1 de UP o DOWN para ajustar la dirección de pisos (rango 0–56). Después de retirar la tapa del puente, la dirección se guarda automáticamente Terminal de comunicación de Modbus y de alimentación CN1 Pines 2 y 3 son para la conmunicación de Modbus. Los pines 1 y 4 son para la alimentación de DC. 3.3.3 HCB-D2 Tablero de indicador ultrafino de segmento de LCD La siguiente figura muestra el aspecto y las dimensiones de la HCB-D2. Figura 3-12 Aspecto y dimensiones del HCB-D2 La siguiente figura muestra el método de instalación de HCB-D2. Figura 3-13 Método de instalación del HCB-D2 En la siguiente tabla se describen los terminales de entrada y salida del HCB-D2. Tabla 3-8 Terminales de entrada y salida del HCB-D2 Nombre del terminal Función Cableado del terminal Interfaz para el botón de llamada hacia arriba y el indicador UP Los pines 2 y 3 son para la entrada de llamada hacia arriba. Los pines 1 y 4 son la alimentación para el indicador de llamada hacia arriba (salida de 24 VDC , capacidad de carga: 40 mA). Interfaz para el botón de llamada hacia abajo y el indicador DOWN Los pines 2 y 3 son para la entrada de llamada hacia abajo. Los pines 1 y 4 son la alimentación para el indicador de llamada hacia abajo (salida de 24 VDC, capacidad de carga: 40 mA). Interfaz para la emergencia de incendio y interruptores de cerradura del ascensor. XF/ST Los pines 1 y 2 son para la entrada de emergencia de incendio. Los pines 3 y 4 son para la entrada de la cerratura del ascensor. Terminal para ajustar la dirección de pisos. Poner en cortocircuito a J1,y pulse el botón de UP o J1 DOWN para ajustar la dirección de pisos (rango 0–56). Después de retirar la tapa del puente, la dirección se almacena automáticamente Terminal de comunicación de Modbus y de alimentación CN1 Pines 2 y 3 son para la conmunicación de Modbus. Los pines 1 y 4 son para la alimentación de DC. 3.3.4 HCB-U1 4.3-inch (Tablero de indicador de segmento de LCD(fondo azul letras en blanco) La siguiente figura muestra el aspecto y las dimensiones de la HCB-U1. Figura 3-14 Aspecto y dimensiones del HCB-U1 La siguiente figura muestra el método de instalación de HCB-U1. Figura 3-15 Método de instalación del HCB-U1 En la siguiente tabla se describen los terminales de entrada y salida del HCB-U1. Tabla 3-9 Terminales de entrada y salida del HCB-U1 Nombre del Función terminal Interfaz para el botón de llamada hacia arriba y el indicador J1 Los pines 2 y 3 son para la entrada de llamada hacia arriba. Los pines 1 y 4 son la alimentación para el indicador de llamada hacia arriba (salida de 24 Cableado del terminal VDC , capacidad de carga: 40 mA). Interfaz para el botón de llamada hacia abajo y el indicador J2 Los pines 2 y 3 son para la entrada de llamada hacia abajo. Los pines 1 y 4 son la alimentación para el indicador de llamada hacia abajo (salida de 24 VDC, capacidad de carga: 40 mA). Interfaz para la emergencia de incendio y interruptores de cerradura del ascensor. J3 Los pines 1 y 2 son para la entrada de emergencia de incendio. Los pines 3 y 4 son para la entrada de la cerratura del ascensor. Botón para ajustar la dirección de pisos. Mantenga pulsado el botón para ajustar la dirección S1 de pisos(rango 0–56). Después de dejar de pulsar, el número de dirección parpadea tres veces y el ajuste es un éxito. Terminal de comunicación de Modbus y de CN1 alimentación Pines 2 y 3 son para la conmunicación de Modbus. Los pines 1 y 4 son para la alimentación de DC. 3.3.5 HCB-V1 (6.4-inch Tablero de indicador de segmento de LCD ) La siguiente figura muestra el aspecto y las dimensiones de la HCB-V1. Figura 3-16 Aspecto y dimensiones del HCB-V1 La siguiente figura muestra el método de instalación de HCB-V1. Figura 3-17 Método de instalación del HCB-V1 En la siguiente tabla se describen los terminales de entrada y salida del HCB-V1. Tabla 3-10 Terminales de entrada y salida del HCB-V1 Nombre del Función terminal Interfaz para el botón de llamada hacia arriba y el indicador J1 Los pines 2 y 3 son para la entrada de llamada hacia arriba. Los pines 1 y 4 son la alimentación para el indicador de llamada hacia arriba (salida de 24 VDC , capacidad de carga: 40 mA). Interfaz para el botón de llamada hacia abajo y el indicador J2 Los pines 2 y 3 son para la entrada de llamada hacia abajo. Los pines 1 y 4 son la alimentación para el indicador de llamada hacia abajo (salida de 24 VDC, capacidad de carga: 40 mA). Interfaz para la emergencia de incendio y interruptores de cerradura del ascensor. J3 Los pines 1 y 2 son para la entrada de emergencia de incendio. Los pines 3 y 4 son para la entrada de la cerratura del ascensor. Botón para ajustar la dirección de pisos. Mantenga pulsado el botón para ajustar la S1 dirección de pisos(rango 0–56). Después de dejar de pulsar, el número de dirección parpadea tres veces y el ajuste es un éxito. Cableado del terminal Terminal de comunicación de Modbus y de alimentación CN1 Pines 2 y 3 son para la conmunicación de Modbus. Los pines 1 y 4 son para la alimentación de DC. 3.4 Tablero de CCB (MCTC-CCB) El tablero de llamada de cabina (MCTC-CCB) es otra interfaz entre el usuario y el sistema de control. Cada CCB cuenta con 24 entradas y 22 salidas, incluyendo 16 botones de piso y 8 señales funcionales. El CCB recoge principalmente las llamadas de botón y emite señales de los indicadores de llamadas de botón. La necesidad del uso de 31-piso se puede realizar a través de la conexión en cascada. CN2 es un conector de entrada y CN1 es un conector de salida en cascada. La siguiente figura muestra el aspecto y las dimensiones de MCTC-CCB.. Figura 3-18 Aspecto y dimensiones del MCTC-CCB La siguiente figura muestra el método de instalación de MCTC-CCB. Figura 3-19 Método de instalación del MCTC-CCB En la siguiente tabla se describen los terminales de entrada y salida del MCTC-CCB. Tabla 3-11 Terminales de entrada y salida de MCTC-CCB No. Interfaz 1 JP1 2 JP2 3 JP3 4 JP4 5 JP5 6 JP6 7 JP7 8 9 JP8 JP9 10 JP10 11 JP11 12 JP12 13 JP13 Pins 2 y 3 Pins 1y 4 Entrada de botón de Salida de indicador de piso 1 piso 1 Entrada de botón de Salida de indicador de piso 2 piso 2 Entrada de botón de Salida de indicador de piso 3 piso 3 Entrada de botón de Salida de indicador de piso 4 piso 4 Entrada de botón de Salida de indicador de piso 5 piso 5 Entrada de botón de Salida de indicador de piso 6 piso 6 Entrada de botón de Salida de indicador de piso 7 piso 7 Entrada de botón de Salida de indicador de piso 8 piso 8 Entrada de botón de Salida de indicador de piso 9 piso 9 Entrada de botón de Salida de indicador de piso 10 piso 10 Entrada de botón de Salida de indicador de piso 11 piso 11 Entrada de botón de Salida de indicador de piso 12 piso 12 Entrada de botón de Salida de indicador de piso 13 piso 13 Notas Para CCB2, la señal de entrada de JPn corresponde a entrada de botón de piso (16 + n) No. Interfaz 14 JP14 15 JP15 16 JP16 17 JP17 18 JP18 19 JP19 Pins 2 y 3 Pins 1y 4 Entrada de botón de Salida de indicador de piso 14 piso 14 Entrada de botón de Salida de indicador de piso 15 piso 15 Entrada de botón de Salida de indicador de piso 16 piso 16 Entrada de botón de Salida de indicador de apertura de puerta apertura de puerta Entrada de botón de Salida de indicador de cierre de puerta cierre de puerta Entrada de botón de Salida de indicador de retardo de apertura de retardo de apertura de puerta puerta 20 JP20 Entrada de derivación 21 JP21 Entrada de operador 22 JP22 Entrada de cambio de dirección Notas Salida de indicador de No válido para CCB derivación 2. Reservado Reservado Entrada de 23 JP23 funcioamiento Reservado independiente 24 JP24 Entrada de bombero Reservado Nota: Los pines 1 y 2 son positivos de alimentación. El pin con marca de punto blanca o que sea rectangular es el pin 1. Realice el cableado estrictamente de acuerdo con las marcas de terminales y asegurar de que se ha insertado en el botón de forma segura. Debido a que el MCTC-CCB tiene la misma interfaz, no haga conexión incorrecta al conectar varios tableros en serie. 3.5 Selección y Uso de la Tarjeta de MCTC-PG El NICE3000new puede realizar CLVC sólo con el uso de la tarjeta de MCTC-PG. Las siguientes figuras muestran el aspecto de la tarjeta MCTC-PG y su instalación en el controlador. Directamente inserte el terminal J1 de la tarjeta de MCTC-PG en el terminal de J12 del controlador. Figura 3-20 Aspecto de la tarjeta de MCTC-PG y su instalación en el controlador 3.5.1 Selección de la tarjeta de MCTC-PG Monarch ofrece cuatro modelos de tarjeta de PG, MCTC-PG-A2, MCTC-PG-D, MCTC-PG-E y MCTC-PG-F1 para diferentes tipos de codificadores, como se describe en la siguiente tabla. Tabla 3-12 Selección de los modelos de tarjetas de MCTC-PG Tipo de encoder Tarjeta de PG Adaptable Codificador de push-pull Codificador MCTC-PG-A2 incremental de colector abierto Codificador de UVW MCTC-PG-D Codificador de SIN/COS MCTC-PG-E Aspecto y Dimensión Codificador absoluto MCTC-PG-F1 (ECN413/1313) 3.5.2 Cableado del terminal y descripción de la Tarjeta de MCTC-PG La tarjeta de MCTC-PG está conectada al controlador y el codificador de la siguiente manera: El terminal J1 y el terminal CN1 de la tarjeta de MCTC-PG están conectados respectivamente al terminal J12 de la MCB en el controlador y el codificador del motor. Diferentes modelos de tarjeta de MCTC-PG están conectados al MCB de la misma manera. El método de conexión al codificador depende del terminal CN1 del modelo. La siguiente figura muestra el cableado entre MCTC-PG-E y el controlador. Figura 3-21 Cableado entre MCTC-PG-E y el controlador La siguiente tabla define los terminales CN1 de diferentes modelos de la tarjeta de MCTC-PG. Tabla 3-13 Definiciones de los terminales CN1 de diferentes modelos de la tarjeta de MCTC-PG. MCTC-P MCTC-PG-D G-A2 Vací 1 12V 1 A+ 6 2 PGM 2 A- 7 U+ 3 PGA 3 B+ 8 U- 4 PGB 4 B- 9 V+ 5 Vac 1 V- o MCTC-PG-E 11 1 2 W+ 1 W- 2 1 VC 3 C 1 CO 4 M 1 Vac BVa cío 6 7 ACO M MCTC-PG-F1 11 C- 1 12 D+ 2 D- 3 3 Z+ 8 B+ 13 4 Z- 9 VCC 14 5 A+ 1 C+ 15 Va cío Va 4 5 BVací o Vací o Vací o A+ 6 7 8 9 1 AGN D B+ 5V (UP) CLK 11 12 13 14 15 CLK DAT A+ DAT AVací o 5V ío 0 5 ío 0 cío 0 + (Sen sor) CN1 CN1 CN1 CN1 3.5.3 Precauciones al conectar la tarjeta de MCTC-PG 1) 2) 3) El cable de la tarjeta de MCTC-PG al codificador debe ser separado de los cables del circuito de control y el circuito de potencia. Cableado en paralelo en estrecha distancia está prohibido. El cable de la tarjeta de MCTC-PG al codificador debe ser un cable blindado. El blindaje debe estar conectado a la PE en el lado del controlador. Para minimizar la interferencia, se sugiere una conexión a tierra de un solo extremo. El cable de la tarjeta MCTC-PG al codificador debe pasar por el conducto separado y la carcasa metálica debe estar conectada a tierra de manera fiable. 3.5.4 Selección de motor adaptable Los principales contadores de la relación eléctrica entre el controlador y el motor son voltaje y la corriente. 1) En las aplicaciones de ascensor generales, el voltaje de red de entrada es 380 V, y el voltaje del motor sólo puede ser igual o menor que 380 V. Por lo tanto, al seleccionar el NICE3000new, puede sólo tomar la corriente del motor en consideración. 2) Cuando el NICE3000new está diseñado, el grande subsidio de seguridad está reservado para el módulo de alimentación principal. El controlador puede funcionar adecuadamente dentro de 1,1 veces de la corriente de salida nominal. Durante el funcionamiento estable, el par de salida máximo es de 150% del par nominal, y puede alcanzar hasta el 200% del par nominal durante un corto tiempo. Por lo tanto, para el motor con la tensión nominal de 380 V, se puede seleccionar el controlador de la misma clase de podencia. Mientras la corriente nominal del motor es menor que 1,1 veces de la corriente de salida del controlador, el controlador de la misma clase de potencia también se puede utilizar. En términos generales, al seleccionar un motor adaptable, asegúrese de que la corriente nominal del motor es igual a o menor que la corriente de salida del controlador. Para conocer las especificaciones técnicas del controlador, consulte la sección 2.3. 3.6 Selección de los dispositivos periféricos eléctricos 3.6.1 Descripción de los dispositivos periféricos eléctricos 1) No instale el condensador o supresor de sobretensiones en el lado de salida del controlador. De lo contrario, puede provocar fallos en el controlador o daños en el condensador y supresor de sobretensiones. 2) Entradas / Salidas (circuito principal) del controlador contienen armónicos, que pueden interferir con el dispositivo de comunicación conectado al controlador. Por lo tanto, instale un filtro anti-interferencias para minimizar la interferencia. 3) Seleccione los dispositivos periféricos basados en aplicaciones reales, así como haciendo referencia a la sección 3.6.2. En la siguiente tabla se describen los dispositivos eléctricos periféricos. Tabla 3-14 Descripción de los dispositivos eléctricos periféricos Partes Lugar de montaje Primer plano del lado de MCCB entrada de alimentación del controlador Contactor de seguridad Reactor de entrada de AC Entre el MCCB y el lado de entrada del controlador Descripción de funciones Corta la fuente de alimentación del controlador y proporciona protección contra cortocircuitos. Aplica / Corta la fuente de alimentación del controlador. La apertura / cierre del contactor es controlado por el circuito de seguridad externo. 1) Mejora el factor de potencia del lado de entrada. 2) Elimina los armónicos más altos en el lado de entrada Lado de entrada del para proporcionar una protección eficaz en el puente de controlador rectificador. 3) Elimine el desequilibrio de corriente de entrada debido al desequilibrio entre las fases de potencia. Reactor de Entre el lado de salida del salida de controlador y el motor, cerca AC del controlador Si la distancia entre el controlador y el motor es mayor que 100 m, instale un reactor de salida de AC. 3.6.1 Selección de los dispositivos periféricos eléctricos Especificación de los cables y un cableado adecuado mejora en gran medida la capacidad de anti-interferencia y la seguridad del sistema, lo que facilita la instalación y la puesta en servicio y mejora la estabilidad de marcha del sistema. En la siguiente tabla se describen las especificaciones de los dispositivos eléctricos periféricos para la selección. Tabla 3-15 Especificación de dispositivos eléctricos periféricos para la selección Cable del Modelo de controlador MCCB (A) Contactor (A) circuito principal(mm ²) Cable del circuito de control (mm²) Cable a tierra(mm²) Monofásico 220V, rango-15%~20%,50/60Hz NICE-L-C-2002 16 12 1 0.75 1 NICE-L-C-2003 20 18 2.5 0.75 2.5 220-NICE-L-C-4007 25 18 4 0.75 4 220-NICE-L-C-4011 40 25 6 0.75 6 220-NICE-L-C-4015 50 32 6 0.75 6 220-NICE-L-C-4018 50 38 6 0.75 6 220-NICE-L-C-4022 63 50 10 0.75 10 220-NICE-L-C-4030 80 65 16 0.75 16 Trifásico220V,rango -15%~20%,50/60Hz NICE-L-C-2002 16 12 1.5 0.75 1.5 NICE-L-C-2003 25 18 2.5 0.75 2.5 220-NICE-L-C-4007 32 25 4 0.75 4 220-NICE-L-C-4011 40 32 6 0.75 6 220-NICE-L-C-4015 50 38 6 0.75 6 220-NICE-L-C-4018 63 40 10 0.75 10 220-NICE-L-C-4022 80 50 10 0.75 10 220-NICE-L-C-4030 100 65 16 0.75 16 Trifásico 380V, rango -15%~20%,50/60Hz NICE-L-C-4002 10 9 0.75 0.75 0.75 NICE-L-C-4003 16 12 1.5 0.75 1.5 NICE-L-C-4005 25 18 2.5 0.75 2.5 NICE-L-C-4007 32 25 4 0.75 4 NICE-L-C-4011 40 32 6 0.75 6 NICE-L-C-4015 50 38 6 0.75 6 NICE-L-C-4018 63 40 10 0.75 10 NICE-L-C-4022 80 50 10 0.75 10 NICE-L-C-4030 100 65 16 0.75 16 NICE-L-C-4037 100 80 25 0.75 16 Cable del Modelo de controlador MCCB (A) Contactor (A) circuito principal(mm ²) Cable del circuito de control (mm²) Cable a tierra(mm²) NICE-L-C-4045 160 95 35 0.75 16 NICE-L-C-4055 160 115 50 0.75 25 NICE-L-C-4075 225 170 70 0.75 35 NICE-L-C-4090 250 205 95 0.75 50 NICE-L-C-4110 315 245 120 0.75 60 NICE-L-C-4132 350 300 120 0.75 60 NICE-L-C-4160 400 300 150 0.75 75 Para evitar que la potencia fuerte interfiera con la potencia débil, los cables de fuerte potencia deben estar separados de los cables de débil potencia durante el cableado en el ducto. Cables de conexión a tierra deben ser utilizados para separar cables viajeros de fuerte potencia y de débil potencia. "Podencia fuerte" se refiere al voltaje de 36 V y por encima. 3.7 Diagrama de Cableado Eléctrico del Sistema de Control de NICE3000new Figura 3-22 Diagrama de Cableado Eléctrico del Sistema de Control de NICE3000new 3.8 Instalación de Señales de Posición del Ducto En el control de elevador, para realizar el aterrizaje con precisión y funcionamiento con seguridad, la posición del coche debe ser identificada en base a las señales de posición del ducto. Estas señales de posición del ducto incluyen los interruptores de nivelación, interruptores de ralentización hacia arriba /abajo, interruptores de límite hacia arriba /abajo, finales de carrera hacia arriba / abajo. Estas señales de posición del ducto se transmiten directamente por los cables del ducto al MCB del controlador. Para el método de cableado eléctrico, consulte la Figura 3-22. La siguiente figura muestra la disposición de las señales de posición en el ducto. Figura 3-23 Disposición de las señales de posición de ducto 3.8.1 Instalación de señales de nivelación Señales de nivelación comprenden el interruptor de nivelación y la placa de nivelación y se conecta directamente al terminal de entrada del controlador. Se utiliza para que el coche aterrice en cada piso con precisión. Los interruptores de nivelación se instalan generalmente en la parte superior del coche. El sistema NICE3000new admite la instalación de1-3 interruptores nivelación. La placa de nivelación está instalada en el riel de guía en el ducto. Una placa de nivelación debe ser instalada en cada piso. Asegúrese de que las placas de nivelación en todos los pisos se instalan con la misma profundidad y verticalidad. La siguiente figura muestra la instalación de señales de nivelación Figura 3-24 Instalación de señales de nivelación En la siguiente tabla se describen los requisitos de instalación de interruptores de nivelación Tabla 3-16 Requisitos de instalación de interruptores de nivelación Número de interruptor Método de Conecta a los terminales de entrada de es de instalación controlador nivelación Ajuste del código de función F5-01 = 0 F5-02 = 35 (NC) 1 F5-03 = 0 F5-01 = 0 F5-02 = 03 (NA) F5-03 = 0 F5-01 = 33 (NC) F5-02 = 0 F5-03 = 34 (NC) 2 F5-01 = 01 (NA) F5-02 = 0 F5-03 = 02 (NA) F5-01 = 33 (NC) 3 F5-02 = 35 (NC) F5-03 = 34 (NC) F5-01 = 01 (NA) F5-02 = 03 (NA) F5-03 = 02 (NA) Cuando instala placas de nivelación, asegúrese de que las banderas en todos los pisos están montadas con la misma profundidad y la verticalidad. De lo contrario, la exactitud de nivelación se verá afectada. La longitud recomendada de la bandera es de 80-200 mm. Más señales de entrada de nivelación deben agregarse si se utiliza la función de pre-apertura de la puerta. En este caso, es necesario aumentar la longitud de la bandera correctamente. Para más detalles sobre el módulo de pre-apertura de la puerta, póngase en contacto con Monarch o agente local. 3.8.2 Instalación de Interruptores de ralentización El interruptor de ralentización es uno de los componentes claves de protección del NICE3000new, protege el ascensor del terminal superior de sobreviaje o el terminal inferior de sobreviaje a la velocidad máxima cuando la posición del ascensor se vuelve anormal. El sistema de NICE3000new admite un máximo de tres pares de interruptores de ralentización. El interruptor de ralentización 1, interruptor de ralentización 2 y el interruptor de ralentización 3 se instala desde los dos extremos del ducto al piso intermedio uno por uno. Por lo general, sólo se requiere un par de interruptores de ralentización para el ascensor de baja velocidad. Se necesitan dos o tres pares de interruptores de ralentización para el ascensor de alta velocidad. La distancia de ralentización L indica la distancia desde el interruptor de ralentización a la placa de nivelación en el piso terminal. La fórmula de cálculo es la siguiente: En la fórmula, L indica la distancia de ralentización, V indica el F0-04 (velocidad del ascensor nominal), y F3-08 indica la velocidad de deceleración especial. El valor predeterminado de F3-08 (velocidad de deceleración especial) es de 0.9 m/s2.. Las distancias de ralentización calculadas de acuerdo con diferentes velocidades nominales del ascensor se enumeran en la tabla siguiente: Tabla 3-17 distancias de desaceleración basadas en diferentes velocidades nominales de ascensor Velocia dad nominal (m/s) 0.25 0.4 0.5 0.63 0.75 1 1.5 1.6 1.75 2 2.5 3 3.5 4 Distanci a de de deceler 0.2 0.2 0.2 0.2 0.4 0.7 1.5 1.7 2.0 2.0 2.0 2.0 2.0 2.0 no no no no no no no no no 2.5 4.0 4.0 4.0 4.0 no no no no no no no no no no no 6 8 11 ación 1 Distanci a de de deceler ación 2 Distanci a de de deceler ación 3 Nota: 1. Ascendor de velocidad V<1m/s ,se recomienda que la distancia real de instalación del interruptor de deceleración se acerque lo más posible del valor recomendado en esta tabla. 2. Ascendor de velocidad 1m/s≤V≤2m/s, se permite una diferencia de ±0.1m entre la distancia real de instalación del interruptor de deceleración y el valor recomendado en esta tabla. 3. Ascencor de velocidad 2m/s<V≤4m/s, se permite una diferencia de ±0.3m entre la distancia real de instalación del interruptor de deceleración y el valor recomendado en esta tabla. Nota: 1. Las distancias de de deceleración se calcula en el caso de la tasa de desaceleración/ aceleración de 0.6m/s y la tasa especial de desaceleración de 0.9m/s2(por defecto de fábrica) 2. Disminuir la tasa de desaceleración/ aceleración o aumentar la tasa especial de desaceleración no afectará la seguriadad de uso, sin embargo, aumentar la tasa de desaceleración/ aceleración o disminuir la tasa especial de desaceleración puede traer riesgos para la segurida. Si necesita cambiarlo, calcule la distancia de deceleración adecuada según la fórmula para instalar el interruptor. 3.8.3 Instalación de Interruptores de límite The up limit switch and down limit switch is to protect the elevator from over travel top/bottom terminal when the elevator does not stop at the leveling position of the terminal floor. El interruptor de límite de hacia arriba y hacia abajo es proteger el ascensor del terminal superior / inferior de sobreviaje cuando el ascensor no se detiene en la posición de nivelación del piso terminal. El interruptor de límite de arriba necesita ser instalado 30-50 mm lejos de la posición de nivelación superior. El interruptor de límite actúa cuando el coche sigue marchando hacia arriba 30-50 mm desde la posición de nivelación superior. El interruptor de límite de abajo necesita ser instalado 30-50 mm lejos de la posición de nivelación inferior. El interruptor de límite actúa cuando el coche sigue marchando hacia abajo 30-50 mm desde la posición de nivelación inferior. 3.8.4 Instalación de finales de carrera The final limit switch is to protect the elevator from over travel top/bottom terminal when the elevator does not stop completely upon passing the up/down limit switch. El final de carrera final es proteger el ascensor del sobreviaje de terminal superior / inferior cuando el ascensor no se detiene por completo al pasar el interruptor de límite de arriba / abajo. El final de carrera de arriba se monta por encima del interruptor de límite de arriba. Por lo general, es de 150 mm lejos de la posición de nivelación superior. El final de carrera de abajo se monta debajo del interruptor de límite de abajo. Por lo general, es de 150 mm lejos de la posición de nivelación inferior. Capítulo 4 Uso del NICE3000new El NICE3000new es compatible con cuatro herramientas de depuración, teclado de 3-botones en el MCB, el panel de operación de LED, el operador de LCD y software de monitoreo de ordenador servidor . Herramienta Descripción de función Observac ión Teclado de 3-botones Se utiliza para introducir los comandos de depuración de ducto y ver la información de piso. Estándard Panel de operación de LED Se utiliza para ver y modificar los parámetros relacionados con el accionamiento y el control del ascensor. Opcional Operator de LCD Se utiliza para ver los parámetros relacionados con el accionamiento y control del ascenso en diagrama y texto, y modificar y copiar estos parámetros. Opcional Software de monitoreo de ordenador servidor Se utiliza para supervisar el estado del ascensor actual, ver y modificar todos los parámetros, y cargar y descargar parámetros en el PC. Opcional La siguiente parte describe el teclado de uso común, el panel de operación de LED y operator de LCD con detalle. 4.1 Uso de Teclado de 3-botones El teclado consta de tres LEDs de 7-segmentos y tres botones. Usted puede ver información sobre el controlador e introducir los comandos simples en el teclado. El teclado está descubierto, y preste atención a los siguientes puntos durante el uso: 1. Use guantes aislantes al realizar operaciones en el teclado para evitar descargas eléctricas o daños en los componentes del controlador debido a descargas electrostáticas. 2. No use un metal o herramienta afilada para presionar el botón con el propósito de evitar fallo de cortocircuito o daños en los componentes del MCB. La siguiente figura muestra el aspecto del teclado. Figura 4-1 Aspecto del teclado Como se muestra en la figura anterior, los tres botones son PRG, UP, y SET. Las funciones de los tres botones son los siguientes: PRG: Pulse este botón en cualquier estado para que aparezca el número del grupo de función actual. Puede presionar el botón de UP para cambiar el número de grupo de funciones. UP: Presione este botón para aumentar el número de grupo de función. Currently, the MCB defines a total of 13 function code groups, namely, F0 to F9, and FA to FC. You can press the UP button to display them in turn. In addition, in special function code group menu, you can input simple references by using the UP button. Actualmente el MCB define un total de 13 grupos de códigos de función, con el nombre de F0 a F9, y FA a FC. Puede presionar el botón UP para mostrarlas a su vez. Además, en el menú especial de grupo de código de función, puede introducir referencias simples por el uso del botón UP. SET: En el menú de grupo de código de función, presione este botón para entrar en el menú del grupo de código de función. In special function code group menu, after you input a simple reference and press this button to save the setting, the display will return to the F0 menu by default. En el menú especial de grupos de código de función, después de ingresar una simple referencia y pulsar este botón para guardar la configuración, el indicador volverá al menú F0 por defecto. La siguiente figura muestra la configuración de aumentar el piso llamado a 5. Figura 4-2 Ajuste del piso llamado Los grupos de códigos de función que aparecen en el teclado se describen de la siguiente manera: 1. F0: indicador de piso y dirección de marcha El menú de F0 se muestra en el teclado por defecto al encender. El primer LED indica la dirección de marcha, mientras que los dos últimos LEDs indican el número del piso actual del ascensor. Cuando el ascensor se detiene, el primer LED no indica nada. Cuando el ascensor funciona, el primer LED parpadea para indicar la dirección de marcha. Cuando se produce un fallo del sistema, los LEDs de 7-segmentos muestran automáticamente los código de error y parpadean. Si el fallo se restablece automáticamente, se mostrará el menú de F0. 2. F1: entrada de comando de piso de marcha Después de entrar en el menú de F1, los LEDs de 7-segmentos indican el piso inferior (F6-01). Puede presionar el botón UP para ajustar el piso de destino dentro de la gama del más bajo al superior, y, a continuación, pulse el botón SET para 3. 4. 5. 6. 7. 8. 9. guardar la configuración. El ascensor corre hacia el piso de destino, y el indicador cambia al menú F0 al mismo tiempo. F2: restauración de fallos y presentación del código de fallo Después de entrar en el menú F2, los LED de 7-segmentos indican "0". Puede presionar el botón UP para cambiar la configuración a 1 o 2. Indicador "1": Si selecciona este valor y presiona el botón SET, el fallo del sistema se reestablece. Luego, el indicador cambia automáticamente al menú de F0. Indicador "2": Si selecciona este valor y pulsa el botón SET, los LEDs de 7segmentos muestran los 11 códigos de fallo y el tiempo de ocurrencia circularmente. Puede pulsar el botón PRG para salir. F3: indicador de hora Después de entrar en el menú F3, los LEDs de 7-segmentos indican la hora actual del sistema de manera circular. F4: indicador del número de contrato Después de entrar en el menú F4, los LEDs de 7-segmentos indican el número de contrato del usuario. F5: indicador de veces de funcinamiento Después de entrar en el menú F5, los LEDs de 7-segmentos indican las veces del funcionamiento del ascensor circularmente. F6: control de apertura / cierre de puerta Después de entrar en el menú F6, los LEDs de 7-segmentos indica "1-1", y los botones de UP y SET representan respectivamente los botones de apertura y cierre de puerta. Puede pulsar el botón PRG para salir. F7: Entrada de comando de auto-ajuste del ducto Después de entrar en el menú F7, los LEDs de 7-segmentos indican "0". Puede seleccionar 0 o 1 aquí, y "1" indica el comando de autoajuste del ducto disponible. Después de seleccionar "1" y presiona el botón SET, auto-ajuste del ducto se realiza si se cumplen las condiciones. Mientras tanto, el indicador cambia al menú de F0. Después de que el auto-ajuste del ducto se completa, F7 vuelve de nuevo a "0" automáticamente. Si no se cumplen las condiciones de auto-ajuste del ducto se muestra el código de fallo "Err35". F8: función de prueba Después de entrar en el menú F8, los LED de 7-segmentos indican "0". El rango de ajuste de F8 es 1-4, se describe de la siguiente manera: • 1: Llamada de piso prohibida • 2: Apertura de puerta prohibida • 3: Sobrecarga prohibida • 4: Interruptores de límite deshabilitados Después de que finalice el ajuste, presione el botón SET. A continuación, los LED de 7 segmentos indican "Err88" y parpadean, informando que el ascensor se está probando. Al pulsar PRG para salir, F8 vuelve a 0 automáticamente. 10. F9: reservado 11. FA: auto-ajuste Después de entrar en el menú de la FA, los LEDs de 7-segmentos indican "0". El rango de ajuste de FA es 1 y 2, de la siguiente manera: • 1: Auto-ajuste con carga • 2: Auto-ajuste sin carga Después de que finalice el ajuste, presione el botón SET. A continuación, los LEDs de 7-segmentos indican "TUNE", y el ascensor entra en el estado de auto-ajuste. Después de confirmar que el ascensor cumple con las condiciones de funcionamiento seguro, pulse el botón SET de nuevo para iniciar el auto-ajuste. Después de que el auto-ajuste se ha completado, los LEDs de 7-segmentos indican el ángulo actual por 2s y, a continuación, vuelve al menú de F0. Puede pulsar el botón PRG para salir del estado de auto-ajuste. 12. FB: indicador del estado de CTB Después de entrar en el menú de FB, los LEDs de 7-segmentos indican el estado de entrada / salida de la CTB. La siguiente tabla describe el significado de cada segmento de los LEDs. Tabla 4-1 Estado de entrada / Salida del CTB Marca de LED No. segment o Significado del segmento A Cortina de luz 1 B Cortina de luz 2 C D Límite de apertura de puerta 1 Límite de apertura de puerta 2 1 E F Límite de cierre de puerta 1 Límite de cierre de puerta 2 G A plena carga DP Sobrecarga 2 A Carga ligera 3 A Apertura de Significado de ON Entrada activa de Cortina de luz 1 Entrada activa de cortina de luz 2 Entrada activa de límite de apertura de puerta 1 Entrade activa de límite de apertura de puerta 2 Entrada activa de límite de cierre de puerta 1 Entrada activa de límite de cierre de puerta 2 Entrada activa de plena carga Entrada activa de sobrecarga Entrada activa de carga ligera Salida de relé de Diagrama puerta 1 B C D E F G DP Cierre de puerta 1 apertura de puerta 1 Salida de relé de cierre de puerta 1 Cierre forzado Salida de relé de de puerta 1 cierre de puerta 1 Apertura de Salida de relé de puerta 2 apertura de puerta 2 Cierre de puerta 2 Salida de relé de cierre de puerta 2 Cierre forzado Salida de relé de de puerta 2 cierre de puerta 2 Gong de llegada de arriba Gong de llegada de abajo Salida de relé de gong de llegada de arriba Salida de relé de gong de llegada de abajo 13. FC: Cambiar la dirección de ascensor(mismo que la función de F2-10) 0: Dirección no cambia 1: Dirección invertida 4.2 Uso del panel de operación de LED El panel de operación LED está conectado a la interfaz RJ45 del controlador mediante un cable plano de 8-núcleos. Puede modificar los parámetros, monitorizar el estado de trabajo y iniciar o detener el controlador utilizando el panel de operación. La siguiente figura muestra el panel de operación de LED. Figura 4-3 Diagrama del panel de operación de LED 4.2.1 Descripción de los indicadores RUN ON indica que el controlador está en el estado de funcionamiento, y OFF indica que el controlador está en el estado de parada. LOCAL/REMOT Reservado. FWD/REV ON indica dirección de hacia abajo del ascensor, y OFF indica dirección de hacia arriba del ascensor. TUNE/TC ON indica el estado de auto-ajuste Unit Indicators significa que el indicador está encendido, y apagado. significa que el indicador está Hz: unidad de frecuencia A: unidad de corriente V: unidad de voltaje RPM: unidad de la velocidad de rotación %: porcentaje 4.2.2 Descripción de las teclas del panel de control Tabla 4-2 Descripción de las teclas del panel de controles Teclas Nombre Programación Confirmación Incrementar Función Entrar o salir del menú de nivel-I. Entrar en la interfaz de menú nivel por nivel y confirmar el ajuste de parámetros. Aumentar datos o código de función. Disminuir Disminuir datos o código de función. Seleccionar los parámetros que se muestran circularmente en Cambio el estado parado o en marcha y seleccione la cifra a modificar al modificar los parámetros. Iniciar el controlador en el modo de control del panel de funcionar operación. Detener el controlador cuando se encuentra en estado de Parar / Restablecer marcha y realizar la operación de restablecimiento cuando está en el estado de fallo. Pulse esta tecla para mostrar u ocultar la información de fallo Ocultación de fallo en el estado de fallo, lo que facilita la visualización de parámetros. Acceso directo Entrar o salir del menú de acceso directo de nivel-1. 4.2.3 Procedimiento de operación El panel de operación de LED adopta menús de tres niveles. El menú se compone de tres niveles de grupo de código de función (Nivel I), el código de función (Nivel II), y el ajuste de valor de código de función (nivel III), como se muestra en la siguiente figura. Figura 4-4 Procedimiento de operación en panel de control Puede volver al menú de Nivel II de menú de Nivel III pulsando o . La diferencia entre los dos es como sigue: Después de pulsar , el sistema guarda el ajuste del parámetro primero, y luego vuelve al menú de nivel II de y cambia al siguiente código de función. Después de pulsar , el sistema no guarda el ajuste de parámetros, pero vuelve directamente al menú de nivel II y se mantiene en el código de función actual. La siguiente figura muestra el cambio entre los tres niveles de menú. Figura 4-5 Cambio entre los tres niveles de menú En el menú de nivel III, si el parámetro no tiene ningún dígito que parpadea, significa que el parámetro no se puede modificar. Esto puede deberse a que: Tal parámetro es sólo para lectura, tales como parámetros realmente detectados y parámetros de registro de funcionamiento. Tal parámetro no se puede modificar en el estado de funcionamiento y sólo se puede cambiar en el estao parado. 4.2.4 Visualización de los parámetros de estado En el estado parado o en funcionamiento, el panel de operación puede mostrar varios parámetros de estado. Si se visualizan los parámetros o no se determinan por los bits binarios equivalentes convertidos a partir de los valores de FA-01 y FA-02. En el estado parado, un total de 12 parámetros se puede mostrar circularmente pulsando . Puede seleccionar los parámetros que se mostrará mediante la configuración de FA-02 (cada uno de los bits binarios convertidos del valor de FA-02 indica un parámetro). Figura 4-6 Cambio entre los parámetros que se muestran en el estado parado En el estado de funcionamiento, un total de 16 parámetros se pueden mostrar de forma circular presionando . Puede seleccionar los parámetros que se mostrará mediante la configuración de FA-01 (cada uno de los bits binarios convertidos desde el valor de FA-02 indica un parámetro). Figura 4-7 Cambio entre los parámetros que se muestran en el estado de funcionamiento Para más detalles, consulte la descripción de los parámetros correspondientes en el Capítulo 7. 4.3 El uso del operador LCD El operador de LCD es una herramienta de depuración especialmente diseñada para el NICE3000new y está conectado a la interfaz de RJ45 del NICE3000new utilizando un cable plano de 8-núcleos. El operador LCD ofrece funciones tales como la modificación de parámetros, la copia del parámetro, visualización de las curvas, la vigilancia de puertos, ayuda de error, e indicador de llamada, lo que facilita el monitoreo de todos los estados del sistema. Es portátil y puede mostrar informaciones variadas, haciendo que la depuración del ascensor sea más cómoda. La siguiente figura muestra el aspecto del operador LCD. Figura 4-8 Aspecto del operador LCD 4.3.1 Teclas en el operador de LCD Teclas Nombre Izquierda Derecha Perilla/Confir mción Funcionar Función Pulse esta tecla para realizar la función que aparece en la esquina inferior izquierda de la pantalla. Pulse esta tecla para realizar la función que aparece en la esquina inferior derecha de la pantalla. Tiene tanto la función de la perilla como la función de confirmación. Puede girar la perilla para aumentar o reducir el código de función o los datos, y pulse la tecla de confirmación para ejecutar la operación o mover el cursor. Pulse esta tecla para iniciar el controlador en el modo de control de panel de operación En el modo de control de panel de operación, pulse esta tecla para detener Parar el funcionamiento en estado de marcha y restablecer el fallo en el estado de fallo. Programción 4.3.2 Pulse esta tecla para volver al menú del nivel anterior Descripción del indicador La siguiente figura muestra la estructural del indicador del operador de LCD (con la interfaz de monitorización como ejemplo). Figura 4-9 Estructura del indicador El indicador del operador de LCD está dividido en las siguientes tres áreas: Barra de estado Se muestra la información del estado actual del ascensor, como modo de funcionamiento, estado del ascensor, el piso actual y información de fallo en la parada. Área de presentación principal Muestra los valores que pueden ser vistos o modificados para diferentes funciones. Es la interfaz principal de operación. Barra indicadora de operación Indica las funciones de la tecla izquierda y la tecla derecha. En la figura anterior, si pulsa la tecla derecha, el panel de operación cambia a la interfaz de menú. 4.3.3 Breve descripción de las interfaces Interfaz de inicio Esta interfaz se muestra cuando el operador LCD está encendido. Después de permanecer en esta interfaz durante unos segundos, el operador LCD cambia a la siguiente interfaz si la verificación es correcta. Si la verificación es incorrecta, se muestra un aviso. Todas las teclas son inválidas en esta interfaz. Figura 4-10 Interfaz de inicio La interfaz de monitorización aparece automáticamente después de la interfaz de inicio. La interfaz de monitorización muestra los valores de los parámetros de monitorización. Un máximo de 32 parámetros situados en FA-01 y FA-02 se puede monitorizar totalmente. Puede girar la perilla para ver los valores de estos parámetros circularmente. Figura 4-11 Interfaz de monitorización Interfaz principal de operación El interfaz de la operación principal incluye siete iconos. Puede seleccionar cada icono girando la perilla y pulse la tecla de confirmación para entrar en la interfaz correspondiente. Figura 4-12 Interfaz principal de operación − Parámetros Puede ver o modificar todos los códigos de función del controlador. Un menú de tres niveles es compatible, y se puede leer y modificar el valor del código de función en el menú de Nivel III. − Copia Puede copiar los parámetros del controlador para el operador LCD y descargar los parámetros para el controlador. El operador de LCD puede guardar tres grupos de parámetros del ascensor. − Puerto En esta interfaz, puede ver el estado de todas las terminales de entrada y de salida del controlador. − Visualización de curva Usted puede ver la curva de los parámetros del controlador especificados (tales como corriente de par y frecuencia de retroalimentación) que cambian con el tiempo. − Llamada Puede utilizar esta función para simular las señales de llamada de coche y llamada de piso de todas los pisos. − Ayuda de Err Puede ver las causas y las soluciones correspondientes al código de error en esta interfaz. − Configuración del panel de operación En esta interfaz, puede configurar los parámetros del operador de LCD, incluye la contraseña, hora, fecha, y lenguaje. El ajuste no es relativo al controlador. Capítulo 5 Puesta en servicio de Sistema y el Ejemplo de Aplicación 5.1 Puesta en servicio de Sistema Asegúrese de que no hay ninguna persona en el ducto o cabina antes de efectuar la puerta en servicio dl ascensor. Asegúrese de que el circuito periférico y la instalación mecánica están listos antes de realizar la puesta en servicio. La siguiente figura muestra el procedimiento de puesta en servicio del sistema. Figura 5-1 Procedimiento de puesta en servicio del sistema 5.1.1 Compruebe antes de la depuración El ascensor necesita ser puesto en servicio después de haber sido instalado; la puesta en servicio correcta garantiza un funcionamiento seguro y normal del ascensor. Antes de realizar la puesta en servicio eléctrica, compruebe si la parte eléctrica y la parte mecánica están listos para la puesta en servicio para garantizar la seguridad. Al menos dos personas deben estar en el sitio durante la puesta en servicio de modo que la fuente de alimentación se puede cortar inmediatamente cuando se produce una anomalía. 1. Compruebe el campo mecánico y cableado eléctrico. Antes de encendido, compruebe el cableado periférico para asegurar la seguridad de los componentes y del personal. Los elementos que debe comprobar incluyen: 1) Si se corresponden los modelos de componentes 2) Si el circuito de seguridad se ha realizado y es fiable 3) Si el circuito de cerratura de la puerta se ha realizado y es fiable 4) Si el ducto no está obstruido, y el coche tiene ningún pasajero y cumple las condiciones para un funcionamiento seguro 5) Si el gabinete y el motor de tracción son bien conectados a tierra 6) Si el circuito periférico está cableados correctamente según los dibujos del vendedor 7) Si todos los interruptores actúan de forma fiable 8) Si existe un cortocircuito a tierra comprobando la resistencia entre fases del circuito principal 9) Si el ascensor está ajustado al estado de inspección 10) Si la instalación mecánica se ha completado (de lo contrario, resultará en daños al equipo y lesiones personales) 2. Check the encoder. La señal de impulso del codificador es crítica para un control preciso del sistema. Antes de la puesta en servicio, compruebe los puntos siguientes cuidadosamente: 1) El encoder está instalado de forma fiable con el cableado correcto. Para obtener detalles sobre el cableado del encoder, ver sección 3.7. 2) El cable de señal y circuito de fuerte-corriente del encoder se colocan en diferentes conductos para evitar interferencias. 3) El cable del encoder está preferentemente directamente conectado al gabinete de control. Si el cable no es suficientemente largo y se necesita un cable de extensión, el cable de extensión debe ser un cable apantallado y preferiblemente soldado al cable original del codificador utilizando un soldador. 4) El cable apantallado del encoder está conectado a tierra en el extremo conectado al controlador (sólo un extremo está conectado a tierra para evitar la interferencia). 3. Compruebe la fuente de alimentación antes de encendido. 1) La tensión entre fases de la fuente de alimentación de usuario está dentro de (380 V ± 15%), y el grado de desequilibrio no supere el 3%. 2) La tensión de entrada de alimentación entre los terminales de 24 V y COM en el MCB está dentro (24 VDC ± 15%). 3) El calibre del cable de entrada total y la capacidad del interruptor cumplen con los requisitos. Si el voltaje de entrada supera el valor permitido, se causará un daño grave. Distinga lo negativo y positivo de la fuente de alimentación de DC. No haga funcionar el sistema cuando hay pérdida de fase de potencia de entrada. 4. Compruebe la conexión a tierra. 1) Compruebe si la resistencia entre los siguientes puntos y la tierra está cerca de infinito. • R, S, T y PE • U, V, W y PE • 24V y PE en el MCB • Motor U, V, W yPE • Encoder 15V, A, B, PGM y PE • +, – bus terminals y PE • Terminales de circuito de seguridad, de circuito de cerradura de la puerta, y de circuito de control y PE 2) Compruebe los terminales de conexión a tierra de todos los componentes eléctricos del ascesnor y la fuente de alimentación del gabinete de control 5.1.2 Configuración y auto-ajuste de parámetros del motor El NICE3000new es compatible con dos modos principales de control, control vectorial en lazo abierto (SFVC, sensorless flux vector control ) y el control vectorial en lazo cerrado (CLVC, closed-loop vector control). SFVC es aplicable al funcionamiento a la velocidad de inspección para la puesta en servicio y funcionamiento de juicio de error durante el mantenimiento del motor asíncrono. CLVC es aplicable al funcionamiento normal del ascensor . En el modo de CLVC, buen rendimiento de accionamiento y buena eficiencia de funcionamiento se puede lograr en el requisito previo de los parámetros correctos del motor. Parámetros del motor por establecer Los parámetros del motor que están por establecer se indican en la siguiente tabla. Tabla 5-1 Parámetros del motor por establecer Código de función Nombre del parámetro Description F1-25 Tipo de motor 0: Motor asíncrono 1: Motor síncrono F1-00 Tipo de encoder 0: Encoder de SIN/COS 1: Encoder de UVW 2: Encoder incremental de ABZ F1-12 Impulsos del encoder por cada 0–10000 vuelta F1-01 to F1-05 Potencia nominal del motor Estos parámetros dependen del modelo, y Tensión nominal del motor hay que introducir manualmente de acuerdo Corriente nominal del motor a la placa de identificación. Frecuencia nominal del motor Velocidad de giro nominal del motor F0-00 Control mode 0: Control vectorial en lazo abierto(SFVC) 1: Control vectorial en lazo cerrado (CLVC) 2: Control de voltaje / frecuencia (V / F) F0-01 Selección de la fuente de comando 0: Control del panel de operación 1: Control de distancia F1-11 Modo de auto-ajuste 0: Ninguna operación 1: Auto-ajuste con carga 2: Auto-ajuste sin carga 3: Auto-ajuste de ducto Precauciones para auto-ajuste de motor Preste atención a las siguientes precauciones: Asegúrese de que todo el cableado y la instalación cumplen con las especificaciones de seguridad. Asegúrese de que el cableado del motor es correcta (cables de UVW del motor respectivamente conectados a cables de UVW del controlador) para auto-ajuste con carga. Si el cableado del motor es incorrecta, el motor puede sacudir o fracasar en funcionar después de que el freno esté soltado; en este caso, es necesario sustituir dos cualesquiera de los cables de UVW del motor Restablecer el fallo actual y luego iniciar el auto-ajuste debido a que el sistema no puede entrar en el estado de auto-ajuste ("TUNE" no se muestra) cuando hay un fallo. Realice el auto-ajuste del motor de nuevo si se cambia la secuencia de fases o el codificador del motor síncrono. Para el motor síncrono, realice el auto-ajuste tres veces o más, compare los valores obtenidos de F1-06 (Ángulo inicial del encoder) . La desviación de los valores de F1-06 será dentro de ± 5 °, lo que indica que el proceso de auto-ajuste se ha realizado exitosamente. Una vez completado el proceso de auto-ajuste, realice un funcionamiento de inspección de prueba. Compruebe si la corriente es normal, si el sentido de marcha real es el mismo que el sentido establecido. Si el sentido de marcha es diferente del sentido establecido, cambie el valor de F2-10. Auto-ajuste sin carga es peligroso (funcionamiento a velocidad de inspección de muchos gabinetes de control es funcionamiento eléctrico de emergencia y el circuito de seguridad del ducto se pone en cortocircuito). Asegúrese de que no hay ninguna persona en el ducto en este modo de auto-ajuste. La siguiente figura muestra el proceso de auto-ajuste del motor. Figura 5-2 Proceso de auto-ajuste del motor Más descripciones de auto-ajuste del motor son las siguientes: a. Cuando el NICE3000new acciona el motor síncrono, se requiere un codificador para proporcionar señales de realimentación. Debe establecer los parámetros del codificador correctamente antes de realizar el auto-ajuste del motor. b. Durante el auto-ajuste del motor síncrono, el motor tiene que girar. El mejor modo de auto-ajuste es auto-ajuste sin carga; si este modo es imposible, entonces pruebe con auto-ajuste con carga; c. Para motor síncrono, autoajuste con carga aprende resistencia del estator, la inductancia de eje-D y eje-Q, bucle de corriente (incluyendo el servo cero) parámetros de PI y ángulo inicial del codificador; auto-ajuste sin carga aprende adicionalmente el modo de cableado del encoder. d. Para el motor asíncrono, auto-ajuste estático aprende estator resistencia del estator, la resistencia del rotor, y la inductancia de fuga, y automáticamente calcula la inductancia mutua y la corriente de magnetización del motor. Auto-ajuste completo aprende la inductancia mutua, la corriente de magnetización del motor, y los parámetros de bucle de corriente. Estado de salida de RUN y de Contactores de Freno Por el bien de seguridad en diferentes modos de control, el sistema trata los comandos de salida para el contactor de RUN o contactor de frenado de manera diferente. En algunas situaciones, es necesario liberar el contactor de RUN o el contactor de freno manualmente. La siguiente tabla muestra el estado de salida del contactor de RUN y contacor de freno. Tabla 5-2 Estado de salida del contactor de RUN y contacor de freno Mode de contro l Estado de Auto-ajuste con carga Control de Auto-aju panel de Control de ste sin Motor Motor carga síncrono asincrónico Da Salida Da Salida No da salida Da Salida Da Salida No da salida No da salida Da Salida operación (F0-01 = 0) distancia(F0-0 1 = 1) salida Contactor de Da RUN Salida Contacor freno de No da salida 5.1.3 Funciomiento de prueba a velocidad normal Después de asegurarse de que el funcionamiento a la velocidad de inspección es normal, realice el auto-ajuste de ducto, y a continuación usted puede realizar el funcionamiento de prueba a velocidad normal (el ascensor cumple con los requisitos de seguridad de funcionamiento). Para llevar a cabo el auto-ajuste de ducto, las siguientes condiciones deben cumplirse: 1. Las señales del encoder y de sensores de nivelación (NC, NO) son correctos y los interruptores de deceleración están instalados correctamente y actuan correctamente. 2. Cuando el ascensor está en el fondo piso, el interruptor de desaceleración de bajo actúa. 3. El ascensor está en el estado de inspección. El modo de control es el control de distancia y CLVC (F0-00 = 1, F0-01 = 1). 4. El número del piso superior (F6-00) y el número del piso inferior (F6-01) se han establecido correctamente. 5. El sistema no está en estado de alarma de fallo. Si hay un fallo en este momento, pulse para restablecer el fallo. A continuación, establezca F1-11 en 3 en el panel de operación o establezca F7 en 1 en el teclado del MCB, y inicie el auto-ajuste de ducto. Para auto-ajuste de ducto, cuando sólo hay dos pisos, el ascensor necesita marchar por debajo de la posición de nivelación inferior, es decir, el sensor de nivelación está desconectado de la placa de nivelación. No existe tal requisito cuando hay varios pisos. 5.1.4 Puesta en servicio de Máquina de Puerta Correlación entre el controlador de la máquina de la puerta y el controlador del ascensor es que el CTB da salida de comandos de apertura/ cierre de puerta y el controlador de la máquina de puerta retroalimenta la señal de límite de apertura/cierre de puerta. Después de que la puesta en servicio e instalación de la máquina de lpuerta están completas, compruebe si el cableado es correcto y las señales de límite de apertura/cierre de puerta son coherentes con la configuración predeterminada. Para llevar a cabo la puesta en servicio de la máquina de puerta, haga lo siguiente: 1. En el modo de control de terminal del controlador de la máquina de puerta, ponga en cortocircuito manualmente el terminal de salida de relé de apertura de puerta (BM/B1) y terminal de salida de relé de cierre de puerta (BM/B2) en el CTB, y observe si la máquina de la puerta se puede abrir y cerrar correspondientemente. Si la máquina de la puerta no puede actuar correctamente, compruebe si BM/B1 y BM/B2 están erróneamente conectados a los terminales de entrada del controlador de la máquina de la puerta y si la puesta en servicio del controlador de la máquina de puerta es completa. 2. Después de asegurarse de que el control de apertura / cierre de la puerta es normal, compruebe si las señales de realimentación de apertura / cierre de puerta de la máquina de la puerta es normal. a. Revise los estados de NA / NC de las señales de entrada de la puerta por observar los indicadores de entrada en el CTB, que se enumeran en la tabla siguiente. Tabla 5-3 Estado de NA / NC de las señales de entrada de la puerta Estado de Punto de puerta Entrada de Señal X3 Límite de apertura de puerta (Límite Señal de entrada de NC Estado de Ajuste de Estado de Ajuste de indicafor F5-25 indicafor F5-25 de apertura de puerta 1) X4 Bit2 = 1 Cuando la señal (Límite Límite de cierre de X5 de correspondiente cierre de puerta 1) X6 (Límite de cierre de puerta 2) está encendido. está activa, de Bit4 = 1 entrada (Límite la Bit2 = 0 Cuando señal de está activa, el apertura de puerta indicador 2) puerta Señal de entrada de NA el indicador de Bit4 = 0 entrada Bit3 = 1 Bit5 = 1 correspondi ente está apagado. Bit3 = 0 Bit5 = 0 Para obtener detalles sobre la configuración de F5-25, consulte la descripción de F5-25 en el Capítulo 7. b. Compruebe si la señal de límite de apertura / cierre de puerta que recibe el sistema es correcta. Como se muestra en la siguiente figura, que es parte de la pantalla de parámetro de F5-35 en el panel de operación, los segmentos E y C de la derecha de LED de 7-segmentos son los puntos de monitoreo de límite de apertura y cierre de puerta. Segment C ON, segment E OFF: The system receives the door open limit signal and the door is in the open state. Segmento C encendido, segmento E apagado: El sistema recibe la señal de límite de apertura de la puerta y la puerta está en el estado abierto. Segment E encendido, segment C apagado: El sistema recibe la señal de límite de apertura de la puerta y la puerta está en el estado abierto. Los dos segmentos deben estar apagados en el proceso de apertura / cierre de la puerta. Controle la puerta al estado de apertura o cierre manualmente y vea el valor de F5-35. Si se muestra la siguiente pantalla, significa que el controlador de la máquina de puerta retroalimenta las señales correctas de apertura y cierre de la puerta . Figura 5-3 Señales de monitorización de límite de apertura y cierre de puerta 5.1.5 Comodidad de marcha La comodidad de marcha es un factor importante del rendimiento general del ascensor. La instalación incorrecta de las partes mecánicas y los ajustes de parámetros inadecuados causará mala comodidad. Mejorar la comodidad de marcha incluye principalmente el ajuste de la salida del controlador y la construcción mecánica del ascensor. Salida del controlador Los parámetros que pueden influir en la comodidad de marcha se describen en esta parte. Código de la función F1-09 Nombre del Rango de Predeter parámetro ajuste minado Coeficiente de filtro de corriente (motor 0.00–40.00 0.00 Descripción Se puede reducir el temblor vertical de baja frecuencia durante el síncrono) F1-18 F2-00 F2-01 F2-02 F2-03 F2-04 F2-05 Corriente funcionamiento. de magnetización de lazo de velocidad 1 Tiempo integral de lazo de velocidad 1 de 0.00 A la capacidad de carga del motor 0–100 40 0.01–10.00s 0.60s 0.00 – F2-05 2.00 Hz F2-00 y F2-01 son los parámetros de regulación de PI cuando la frecuencia de funcionamiento es inferior a F2-02 (frecuencia de conmutación 1). F2-03 y F2-04 son los parámetros de regulación de PI cuando la frecuencia Ganancia proporcional de lazo de velocidad 2 Tiempo integral de lazo de velocidad 2 Conmutación frecuencia de 2 0.01–300.00 asíncrono. Ganancia proporcional Conmutación frecuencia de 1 El aumento del valor puede mejorar 0–100 35 de funcionamiento es mayor que F2-02 (frecuencia de conmutación 2). 0.01–10.00s 0.80s Los parámetros de regulación entre F2-02 y F2-04 son el valor medio de F2-02–F0-0 6 5.00 Hz ponderado de F2-00 & F2-01 y F2-03 & F2-04. Para una respuesta más rápida del sistema, aumente la ganancia proporcional y reduzca el tiempo integral. Tenga en cuenta que una respuesta rápida del sistema provoca la oscilación del sistema. El método de regulación recomendado es el siguiente: Si la configuración predeterminada no puede satisfacer las necesidades, haga una ligera regulación. Disminuye primero el valor de la ganancia proporcional para que el sistema no oscile. Luego disminuir el tiempo integral para asegurar la capacidad de respuesta rápida y pequeño rebasamiento Si tanto F2-02 (conmutación de frecuencia 1) y F2-05 (conmutación de frecuencia 2) se establecen en 0, sólo F2-03 y F2-04 son válidos. Código de función F2-06 F2-07 Nombre del Rango de Predeter parámetro ajuste minado Ganancia proporcional del bucle de corriente Ganancia integral del bucle de corriente 10–500 60 Descripción F2-06 y F2-07 son los parámetros de ajuste del bucle de corriente en el 10–500 30 algoritmo de control vectorial. Los valores óptimos de estos dos parámetros se obtienen durante el autoajuste del motor, y no se necesitan modificar. Ajuste apropiado de los parámetros puede reprimir temblor durante el funcionamiento y tiene un efecto obvio en la comodidad de marcha. Código Nombre del Rango de Predeter de la parámetro ajuste minado Descripción función Tiempo de F2-18 aceleración de 0.000–1.500s 0.000s arranque F3-00 F3-01 Velocidad de 0.000–0.030 m/s arranque Tiempo de retención de 0.000–0.500s Se puede reducir la sensación de 0.000 m/s escalón en el arranque causado por la fricción estática del carril de guía. 0.000s arranque Se especifica el tiempo de retención Tiempo de control F3-18 de velocidad cero 0.000–1.000s 0.200s de velocidad cero antes de la salida del freno. en el arranque Se especifica el tiempo necesario F3-19 Demora de apertura del freno 0.000–1.000s 0.200s desde que el sistema emitirá la señal de apertura hasta cuando el freno se libera por completo. Se especifica el tiempo de retención Tiempo de demora F3-20 F8-11 al final de 0.200–1.500s 0.200s de velocidad cero después de aplicar funcionmiento el freno. Tiempo de Desde que se emite el mando de retención de apertura del freno, dentro del tiempo velocidad cero desde apertura del 0.200~1.500s 0.200s freno establecido de F8-11 se mantiene la salida de corriente a velocidad cero para evitar que el deslizamiento del coche Figura 5-4 Secuencia de tiempo de funcionamiento El tiempo de liberación de los frenos varía de acuerdo con los tipos y el tiempo de respuesta de los frenos y está fuertemente influenciado por la temperatura ambiente. Una temperatura muy alta de bobina del freno disminuye la capacidad de respuesta de los frenos. Así, cuando la comodidad de marcha en el arranque o parada no pueden mejorarse mediante el ajuste de parámetros de compensación de servo cero o célula de carga, aumente adecuadamente los valores de F3-19/F8-11 para comprobar si el tiempo de liberación del freno influye en la comodidad de marcha. Código de función Nombre del parámetro Predetermin Rango de ajuste Notas ado 0: Pre-par inválido 1: Compensación de F8-01 Selección de pre-par Establezca este pre-par de célula de 0 carga parámetro en base a necesidades reales. 2: Compensación automática de pre-par Coeficiente de F2-11 corriente de servo cero Lazo de velocidad de F2-12 servo cero KP Lazo de velocidad de F2-13 servo cero KI 0.20%–50.0% 15.0% 0.00–2.00 0.50 Estos son los parámetros de regulación de cero servo cuando F8-01 se establece en 2 0.00–2.00 0.60 (compensación automática de par). Cuando F8-01 se establece en 2 (compensación automática de pre-par), el sistema ajusta automáticamente el par compensado en el arranque. a) Aumente gradualmente F2-11 (coeficiente de corriente de servo cero) hasta que la reversión se cancela al liberar el freno y el motor no vibra. b) Disminuye el valor de F2-11 (Coeficiente de corriente de servo cero ) si el motor vibra cuando F2-13 (bucle de velocidad de servo cero TI) es inferior a 1,00. c) El valor de F2-12 (bucle de velocidad de servo cero KP) se puede mantener sin cambios básicamente. No lo cambie en demadiaso alto, de lo contrario es fácil causar vibración del motor . d) Si el ruido del motor es demasiado grande en el arranque de la célula sin carga, disminuye los valores de los parámetros de bucle de velocidad de servo cero (F2-12 y 13) Código de función F8-02 F8-03 F8-04 Nombre del Rango de ajuste parámetro Desplazamiento 0.0%–100.0% de pre-par Ganancia Predetermin ado 50.0% Estos son los parámetros de de 0.00–2.00 0.60 Ganancia de freno 0.00–2.00 0.60 accionamiento Notas regulación de pre-par de célula con carga Cuando F8-01 se establece en 1 (compensación de pre-par de célula de carga), el sistema con una célula de carga pre-emite el par emparejado con la carga para asegurar la comodidad de marcha del ascensor. Estado de accionamiento de motor : a plena carga hacia arriba, sin carga hacia abajo Estado de frenado de motor: a plena carga hacia abajo, sin carga hacia arriba "Desplazamiento de pre-par" es en realidad el coeficiente de equilibrio de ascensor, a saber, el porcentaje de la carga de la cabina a la carga nominal cuando la cabina y el contrapeso están en equilibrio. "Ganancia de accionamiento" o "ganancia de freno" presenta coeficiente actual de pre-par del ascensor cuando el motor funciona en la unidad o en el lado del freno. Si el conjunto de la ganancia es mayor, entonces el valor calculado de compensación de pre-par de arranque es más elevado. El controlador identifica el estado de frenado o de accionamiento de acuerdo con la señal de la célula de carga y calcula automáticamente el valor requerido de compensación de par. Cuando un dispositivo analógico se utiliza para medir la carga, estos parámetros se utilizan para ajustar el arranque del ascensor. El método de ajuste de el arranque es la siguiente: En el estado de accionamiento, aumente el valor de F8-03 si se produce retroceso durante la arranque del ascensor, pero un valor muy alto podría causar sacudida del coche en el arranque. En el estado de frenado, aumentando el valor de F8-04 podría reducir el desplazamiento en la dirección del funcionamiento durante el arranque del ascensor, pero un valor muy alto podría causar sacudida del coche en el arranque. Construcción mecánica La construcción mecánica que afecta la comodidad de marcha implica la instalación del carril de guía, zapato de guía, cable de acero, y el freno, el equilibrio del coche, y la resonancia causada por el automóvil, el carril de guía y el motor. Para motores asíncronos, abrasión o instalación inadecuada de la caja de cambios pueden suscitar mala comodidad de marcha. 1. La instalación del carril de guía implica principalmente la verticalidad y la planitud de superficie de carril de guía, la suavidad de la conexión de carril de guía y el paralelismo entre dos carriles de guía (incluidos los carriles de guía en el lado del contrapeso). 2. Elasticidad de las zapatas de guía (incluyendo la que está en el lado del contrapeso) también influye en la comodidad de marcha. Las zapatas de guía no deben ser demasiado sueltas o apretadas. 3. El accionamiento desde el motor hasta el coche depende totalmente de la cuerda de acero. Gran flexibilidad de la cuerda de acero con resistencia irregular durante el funcionemiento del coche puede provocar oscilaciones de forma riza del coche. Además, el estrés desequilibrada de múltiples cables de acero puede hacer que el coche sacuda durante la carrera. 4. La comodidad de marcha durante el funcionamiento puede verse alterada si el brazo de freno está instalado con demasiada fuerza o se libera de forma incompleta. 5. Si el peso del coche es desequilibrado, provocará estrés desigual de las zapatas de guía que conectan el coche y el carril de guía. Como resultado, las zapatas de guía se frote con el carril de guía durante la marcha, que afecta a la comodidad de marcha. 6. Para motores asíncronos, abrasión o instalación inadecuada de la caja de cambios también pueden afectar al comodidad de marcha. 7. La resonancia es un carácter inherente de un sistema físico, relacionada con el material y la calidad de los componentes del sistema. Si está seguro de que la oscilación es causada por la resonancia, reduzca la resonancia por aumentar o disminuir el peso de la cabina o el contrapeso y la añadir absorbentes de resonancia en las conexiones de los componentes (por ejemplo, pone manta de goma bajo el motor). 5.1.6 Configuración de la contraseña El NICE3000new proporciona la función de protección de contraseña para parámetros. Aquí es un ejemplo de cómo cambiar la contraseña en 12345 ( indica el dígito intermitente), como se muestra en la siguiente figura. Figura 5-5 Ejemplo de cómo cambiar la contraseña Después de establecer la contraseña de usuario (configuración de FP-00 a un valor distinto de cero), el sistema requiere autenticación de contraseña de usuario (el sistema muestra "------") cuando presiona el PRG. En este caso, puede modificar los parámetros de código de función sólo después de introducir la contraseña correcta. Para los parámetros de fábrica (grupo FF), también es necesario introducir la contraseña de fábrica. No trate de modificar los parámetros de fábrica. Si estos parámetros se establecen de forma incorrecta, el sistema puede ser inestable o anormal. En el estado desbloqueado de la protección de contraseña, puede cambiar la contraseña en cualquier momento. El último número introducido será la contraseña de usuario. Si desea desactivar la función de protección de contraseña, escriba la contraseña correcta y luego ajuste FP-00 en 0. Si FP-00 es un valor distinto de cero en el encendido, los parámetros están protegidos por la contraseña. Recuerde la contraseña que ha establecido. De lo contrario, el sistema no se puede desbloquear. 5.2 Aplicación del sistema 5.2.1 Evacuación de Emergencia en un Fallo de Alimentación Los pasajeros pueden estar atrapados en el coche si fallo de alimentación repentinamente sucede durante el uso del ascensor. La función de evacuación de emergencia en el corte del suministro eléctrico se ha diseñado para resolver el problema. La función de evacuación de emergencia se realiza en las dos modalidades siguientes: 1) Fuente de alimentación ininterrumpida (UPS) 2) El cortocircuito de estator de PMSM Los dos modos se describen en detalle en la siguiente parte. Evacuación de Emergencia de 220 V UPS En este esquema, el 220 V UPS proporciona la fuente de alimentación a la unidad principal y el circuito de control de accionamiento. La siguiente figura muestra el circuito de evacuación de emergencia de 220 V UPS . Figura 5-6 Circuito de evacuación de emergencia de 220 V UPS . La señal de evacuación de emergencia de UPS sólo se puede salir por Y6. La siguiente figura muestra varios contactos de los contactores. Figura 5-7 Distintos contactos de los contactores La potencia de UPS se recomienda en la siguiente tabla. Tabla 5-4 Potencia de UPS recomendada para cada clase de potencia Potencia de UPS Potencia de controlador 1 kVA (700–800 W) P ≤ 5.5 kW 2 kVA (1400–1600 W) 5.5 kW < P ≤ 11 kW 3 kVA (2100–2400 W) 15 kW ≤ P ≤ 22 kW La siguiente tabla muestra la configuración de los parámetros relacionados. Tabla 5-5 Configuración de parámetros bajo el esquema de 220 V UPS Código de función Nombre del parámetro Rango de ajuste Velocidad de conmutación F6-48 de evacuación de 0.010–0.630 m/s emergencia F6-49 Piso de Aparcamiento de Evacuación 0 to F6-01 Velocidad de operación de F8-09 evacuación de emergencia 0.05 m/s en el corte de energía Modo de operación de F8-10 evacuación de emergencia en el corte de energía F5-20 (X20) Señal válida de UPS 0: Inválido 1: UPS 2: Energía de batería de 48 V 59 la F5-31 (Y6) Conmutación automática de evacuación de emergencia 13 Aceleración de la operación F3-22 de evacuación de 0.100 ~ 1.300m/s² emergencia 2) Combinación de energía de emergencia de ARD Este plan establece que el ARD ofrezca energía para el motor y el circuito de control de accionamiento. Su esquema de funcionamiento es como sigue: Figura 5-8 Esquema de ARD trifásico Figura 5-9 Esquema de ARD monofásico Código de función Rango de ajuste Descripción F6-48 0.010~0.630m/s Velocidad de conmutación de evacuación de emergencia F6-49 0~F6-01 Piso de Aparcamiento de Evacuación F8-09 0.05m/s Velocidad de operación de evacuación de emergencia en el corte de energía 0:No hay evacuación de F8-10 emergencia 1:Funcionamiento por impulsado Selección de modo de evacuación por UPS F5-20(X20) 27 Señal de funcionamiento de evacuación(NA) Ponga en cortocircuito el estator de PMSM Poner en cortocircuito el estator de PMSM significa poner en cortocircuito las tres fases de UVW de PMSM, que produce resistencia para restringir el movimiento del coche del ascensor. En el lugar de aplicación, un contacto auxiliar de NC se suele añadir al contacto NA del contactor de salida para poner en cortocircuito las tres fases de UVW de PMSM para lograr el efecto. Es posible en teoría, pero puede causar la sobreintensidad de corriente en realidad. Debido a la mala calidad del contactor y el cableado de agregar el contacto auxiliar, la corriente residual del controlador es todavía alto cuando las salidas del UVW están en cortocircuito en la parada anormal. Esto resulta en un fallo de sobre-corriente y puede dañar el controlador o el motor. Esquema de poner en cortocircuito el estator de PMSM de Monarch requiere la instalación de un contactor independiente para cortocircuitar el estator de PMSM. La función de cortocircuitar el estator de PMSM se realiza a través del contacto NC de relé. En el circuito de la bobina del contactor RUN, un contacto de NA del contactor de cortocircuitar el estator de PMSM está conectado en serie para garantizar que el cortocircuito de salida no se produzca cuando el valor del parámetro es incorrecto. La siguiente figura muestra el cableado del contactor independiente de cortocircuitar el estator de PMSM . Figure 5-8 Cableado del contactor independiente de cortocircuitar el estator de PMSM . El ajuste de los parámetros de tal modo de cableado se describe en la siguiente tabla. Tabla 5-6 Ajuste de parámetros de cortocircuitar el estator de PMSM Código de función F5-18 F5-28 Nombre del parámetro Selección de función de X18 Selección de función de de Y3 Valor Descripción Asignar 30 X18 realimentación con de "Señal de entrada del cortocircuito del estator de PMSM". 12 Asignar Y3 con " Contactor de cortocircuito del estator de PMSM". Cuando se utiliza el contartor NC de cortocircuito del estator de PMSM, FE-33 Selección de función de ascensor - Bit8=0 Cuando se utiliza el contactor NA de cortocircuito de estadot de PMSM, Bit8=1 Más detalles sobre el ajuste de la evacuación de emergencia se proporcionan en F6-45, como se indica en la siguiente tabla. Tabla 5-7 Descripción de los parámetros de F6-45 Descripción Bit de funciones Configuración binaria Notas Determinació Bit0 0 determinació n de Bit1 Bit2 Bit3 Posición de parada Reservado 0 Calcular carga (en automáticament base a datos e la dirección de célula de 1 par se calcula de 1 dirección de Modo de dirección n de 0 Si el sentido del Dirección forma automática, del piso de la función de la aterrizaje célula-sin-carga carga o señal 0 más cercano debe estar habilitado, es de media decir, F8-01 se carga) establece en 2.. 1 Para en el piso de base - 0 Para en piso de aterrizaje más cercano - - - Cuando se establece que el sentido del par se Compensaci Bit4 ón de 1 arranqur Compensación de par de arranque válida en el funcionamiento de evacuación de emergencia calcula automáticamente, active la compensación automática de par de arranque. Esta función es inválida cuando se Protección utiliza la función de tiempo de funcionamie Bit8 nto en Si el ascensor no llega al piso requerido después de 1 tiempo de 50s de funcionamiento de evacuación de emergencia, se informa un Err31. Evacuación de de conmutación de modo de frenado de cortocircuito de estator al emergencia accionamiento del controlador. Salida del Bit10 zumbador de La salida del zumbador está activa durante el 1 funcionamiento de evacuación de emergencia de UPS - emergencia Bit11 Reservado 0 - - Modo de frenado de cortocircuito Bit12 de estator conmutado a Habilitar la función de conmutación de modo de 1 frenado de cortocircuito de estator al accionamiento del controlador. accionamien to del controlador Si la velocidad es aún menor que el valor establecido en F6-48 después de que el ascensor está en Modo de Bit13 1 Ajuste de la velocidad modo de frenado conmutación de cortocircuito de de modo de estator durante 10 frenado de s, el controlador cortocircuito comienza a de estator al conducir el accionamien ascensor to del Si el tiempo del controlador. modo de frenado de cortocircuito de 0 Ajuste del tiempo estator excede 50s, el controlador comienza a conducir el ascensor Bit14 Modo de 1 Sale en el límite de cierre de puerta - salida de evacuación de 0 Sale en el límite de apertura de puerta - emergencia Cuando esta Selección de función está función de Bit15 modo de frenado de activada, el ajuste 1 Habiliar esta función de los códigos de función cortocircuito relacionados entre de estator en vigencia. 5.2.2 Control Paralelo de Dos Ascensores El NICE3000new es compatible con el control paralelo de dos ascensores, que se realiza mediante el puerto de comunicación CANbus para el intercambio y tramitación de información entre los dos ascensores. El NICE3000new también es compatible con el control de grupo de tres a ocho ascensores si se utiliza un tablero de control de grupo. Esto realiza la coordinación entre varios ascensores para responder a las llamadas de piso y mejora la eficiencia del uso del ascensor. El NIE3000NEW es compatible con el NICE3000 y NICE5000. En esta sección se describe el uso de dos ascensores en el control paralelo. Para el uso de múltiples ascensores en el control de grupo, consulte la descripción del tablero de control de grupo o póngase en contacto con Monarch. Puertos de Comunicación para el Control Paralelo La siguiente tabla muestra los ajustes de parámetros de control paralelo. Tabla 5-8 Ajuste de parámetros de control paralelo por medio de los puertos de comunicación Código de función Nombre del parámetro Número F6-07 ascensores Configuración en control Rango de ajuste paralelo de en el 1–8 2 modo de grupo F6-08 F6-09 No. de ascensor Selección 1–8 de programa de control Bit3: Paralelo implementado en CAN2 Ascensor principal: 1 Ascensor secundario: 2 Bit 3 = 1 cuando CN4 del puerto de comunicación de CAN2 se utiliza para el control paralelo Bit4: Control paralelo en Bit4 = 1 cuando el NICE3000 compatibilidad con está implicado en el control NICE3000 paralelo / de grupo Por defecto, el puerto de comunicación de CAN 1 se utiliza para el control paralelo de forma predeterminada. Por lo tanto, no es necesario seleccionar el puerto de control paralelo Cuando se utiliza el puerto de comunicación de CAN 2 para el control paralelo, no es necesario ajustar el interruptor de dirección de CTB. Control paralelo mediante CAN1 (Terminal de CN3) Cuando se utiliza el puerto de comunicación CAN 1 (terminal CN3) para el control paralelo, es necesario configurar las direcciones de CTB de acuerdo con la siguiente tabla. Table 5-9 Address and jumper setting of the CTB for CAN1 is used for parallel control Tabla 5-9 Dirección y configuración del puente del CTB para CAN1 utilizado para el control paralelo CTB Ajuste del puente Configuración de dirección CTB de ascensor 1# Ponga en cortocircuito de OFF de J2 o no, CTB de ascensor principal CTB de ascensor 2# Ponga en cortocircuito de ON de J2, CTB de ascensor secundario Figura 5-9 Cableado cuando CAN1 se utiliza para el control paralelo Control paralelo mediante CAN2 (Terminal de CN4) Este modo se puede realizar mediante la conexión directa de los terminales CN4 de dos ascensores y el establecimiento de parámetros relacionados de grupo F6. No es necesario ajustar las direcciones CTB. Figura 5-10 Cableado cuando CAN2 se utiliza para el control paralelo Ajuste de Pisos físicos Pisos físicos, en relación con el sistema de control de Nice, se definen por la posición de instalación de la placa de nivelación. El piso (por ejemplo el primer piso) en el que está instalada la placa de nivelación más bajo corresponde al piso físico 1. El piso físico superior es el número acumulativo de las placas de nivelación. En el modo paralelo, los números de los pisos físicos de la misma planta de dos ascensores son consistentes. Si las estructuras del piso de dos ascensores son diferentes, pisos físicos deben comenzar con el piso con la posición más baja. Los pisos físicos en el área de doblez de los dos ascensores son el mismo. Incluso si el ascensor no para en un piso en la zona de doblez, una placa de nivelación debe instalarse allí. Puede hacer que el aecesnor no pare en el piso mediante el establecimiento de pisos de servicio. Cuando dos ascensores son en modo paralelo, las direcciones de los HCB se deben establecer de acuerdo a los pisos físicos. El funcionamiento paralelo puede ser realizado sólo cuando la configuración de dirección de HCB para un ascensor es la misma que para el otro ascensor en términos del piso mismo. En el modo paralelo, el piso superior (F6-00) y el piso inferior (F6-01) de los ascensores deben establecerse en base a pisos físicos correspondientes. Supongamos que hay dos ascensores en modo paralelo. Ascensor 1 para en piso B1, piso 1, piso 2, y el piso 3, mientras ascensor 2 para en piso 1, piso 3, y el piso 4. Ahora, es necesario establecer los parámetros relacionados y direcciones de HCB de acuerdo a la siguiente tabla. Tabla 5-10 Parametrización y direcciones de HCB de los dos ascensores Número de ascensores en el modo de grupo No. De ascensor Piso Piso real físico Ascensor 1 Ascensor 2 2 2 1 2 Dirección de HCB Indicador de Dirección de Indicador de HCB HCB HCB B1 1 1 FE-01 = 1101 1 2 2 FE-02 = 1901 FE-02 = 2 1901 Piso sin parar, 2 3 3 FE-03 = 1902 pero la placa de FE-03 = nivelación 1902 requerida 3 4 4 5 4 FE-04 = 1903 FE-04 = 4 1903 FE-05 = 5 Bottom floor 1904 1 2 Top floor (F6-00) 4 5 Service floor (F6-05) 65535 (F6-01) 65531 ( No para en piso físico 3) 5.2.3 Control de puerta opuesta NICE3000new tiene cuatro modos de control de puerta opuesta: Modo 1, Modo 2, Modo 3, Modo 4, pero hay dos métodos de realizarse que se puede establecer mediante el bit15 de código de función de FE-33. Método A: Los métodos de realizarse mantienen igual a NICE3000; Método B: nuevos métodoss y es completamente diferente de NICE3000 Tabla 5-12 Selección del modo de puerta opuesta Modo de puerta opuesta Configuración de parámetros Descripción de funciones Modo antiguo (igual al NICE3000) FE-33 Método de uso Bit15=1 La puerta frontal y la puerta FC-04 Modo 1 = 0 de atrás actúa (control simultáneamente a la llegada simultáneo) de llamadas de piso y llamadas de cabina. FC-04 = 1(Independient e a llamada de Modo 2 piso, simultánea llamada FE-33 Bit15 = 1; Fb-00 = 2 3 de cabina ) abre a la llegada de llamadas de piso. La puerta frontal y la puerta de atrás actúa simultáneamente a la llegada El ajuste de direcciones de de llamadas de cabina. llamade de piso de puerta La puerta correspondiente se FC-04 = 2 abre a la llegada de llamada (Independiente de piso. A la llegada de las para Modo a La puerta correspondiente se llamada llamadas de de cabina, se piso, selecciona la apertura de delantera y trasera(1-15). El ajuste de llamada de piso de puerta trasera+16 (17-31). Un máximo de 15 pisos son compatibles. control manual puerta entre la puerta frontal para llamada y la puerta de atrás con el de cabina) interruptor de conmutación de la puerta. FC-04 = 3 (Independiente La puerta correpondiente se Modo 4 para llamada abre para llamadas de de piso y de cabina y de piso. cabina) Método nuevo La puerta frontal y la puerta FC-04 Modo 1 = 0 de atrás actúa (control simultáneamente a la llegada simultáneo) de llamadas de piso y llamadas de cabina. El ajuste de direcciones de La puerta correspondiente se llamade de piso de puerta (Independiente abre a la llegada de llamadas delantera y trasera(1-N). El a llamada de F8-16 = N (N de piso. La puerta frontal y la ajuste de llamada de piso de 2 piso, > current top puerta de atrás actúa puerta trasera+16 simultánea a floor) simultáneamente a la llegada (N+1~N+20). llamada de de llamadas de cabina. Un máximo de 20 pisos son cabina )) FC-04 = 2 La puerta correspondiente se compatibles. Fb-00 = 2 Modo Modo 。 3 FC-04 = 1 Independiente para de abre a la llegada de llamada llamada de piso. A la llegada de las piso, llamadas de cabina, se control manual selecciona la apertura de para llamada puerta entre la puerta frontal de cabina) y la puerta de atrás con el interruptor de conmutación de la puerta. FC-04 = 3 (Independiente La puerta correpondiente se Modo 4 para llamada abre para llamadas de de piso y de cabina y de piso. cabina) En el estado de emergencia de incendio, o de inspección o de re-nivelación, la puerta opuesta se encuentra bajo el control simultáneo en lugar de un control independiente. 2) Descripción de cableado de MCTC-CCB en el modo de control de puerta opuesta Cuando NICE3000new adopta los métodos A, B para controlar los tres modos 1,2,3, la manera de cableado de MCTC-CCB es de la siguiente manera: Figura de cableado de MCTC-CCB en modo de control 1,2,3 (COP único) Figura de cableado de MCTC-CCB en modo de control 1,2,3 (COP doble) Figura de cableado de MCTC-CCB en modo de control 4 (Método A) Figura de cableado de MCTC-CCB en modo de control 4 (Método B) 3) El cableado y ajuste de MCTC-HCB de puerta opuesta El cableado y ajuste de MCTC-HCB de puerta opuesta de método A El cableado y ajuste de MCTC-HCB de puerta opuesta de método B 5.2.4 Descripción de Función De VIP El NICE3000new proporciona la función de VIP que el ascensor primero va directamente al piso de vip y proporciona servicios para las personas especiales. Cuando el sistema entra en el estado de VIP, llamadas de cabina y de piso actuales se borran; apertura o cierre de las puertas deben ser controlados de forma manual; el ascensor no responde a las llamadas de piso. Aquí se presenta un ejemplo para explicar cómo usar la función de VIP y establecer el piso de vip. Supongamos que hay pisos de 1 a 20 para el ascensor, y el piso 8 se establece como el piso vip. Tabla 5-13 Configuración de la función de VIP Código función F6-00 de Nombre parámetro Piso superior del ascensor Piso F6-01 del inferior ascensor Rango de ajuste Valor F6-01 ~ 40 20 Notas Ellos se utilizan para establecer el piso superior y el piso inferior del ascensor, del 1 ~ F6-00 1 determinado por el número de placas de nivelación instalados en realidad. F6-12 Piso de VIP FE-32 Selección 0 ~ F6-00 de Bit9: función de VIP 8 Bit9 = 1 Establezca el piso de 8 como el piso de VIP. El servicio de VIP está función de habilitado. ascensor 1 Fd-07 0: Reservado HCB: entrada de Entrada de NA/ NC: 4 JP1 1/33: Señal de bloqueo de ascensor 2/34: Señal Estos parámetros se utilizan de emergencia de incendio para ajustar las funciones de 3/35: los pines 2 y 3 de JP1 y JP2 Piso actual en el HCB. El ajuste es prohibido Fd-08 HCB:Entrada JP2 de 4/36: Señal de piso de 4 efectivo para los HCB para todas los pisos. VIP 5/37: Señal de piso de seguridad 6/38: Entrada de botón de cierre de puerta Bit0: VIP habilitado por La función de VIP está llamadas de piso(en el Bit0 = 1 habilitada en la llamada de piso de VIP) piso. Después de que la entrada Bit1: VIP habilitado por F6-46 Selección de el terminal de llamada de piso para la Bit1 = 1 función de VIP está activa, el sistema entra en el estado función de VIP de VIP. Bit2 to Bit7: Reservado - Bit8: Número limitado de llamadas de cacbina de Bit8 = 1 VIP Si se activa esta función, sólo una llamada de cabina se admite en el estado de VIP.. Cuando hay una llamada de piso en el piso de vip, el sistema entra automáticamente en el estado de VIP. Después de que el terminal de entrada de VIP es ON, el ascensor vuelve al piso de vip para prestar el servicio de VIP. Las veces de funcionamiento de VIP están limitadas por bit8 de F6-46. Si bit8 se establece en 1, el ascensor responde sólo a una llamada de cabina (el último); después de llegar al piso requerido por la llamada de la cabina, el ascensor sale automáticamente del estado de VIP. Si bit8 se establece en 0, el número de llamadas de cabina no está limitado. El ascensor sale automáticamente del estado de VIP si no entra en el funcionamiento de llamada de cabina dentro de 30s después de cada parada o después de que realiza todas las llamadas de cabina. Si no hay llamada de cabina 30s después de que el ascensor entre en el estado VIP, el ascensor sale automáticamente del estado de VIP. Capítulo 6 Tabla de código de función 6.1 Descripción de código de función 1. Hay un total de 18 grupos de códigos de función, cada uno de los cuales incluye varios códigos de función. Los códigos de función adoptan el menú de tres niveles. El número de grupo de código de función es el menú de nivel I; el número de código de la función es el menú de nivel II; el ajuste del código de función es el menú de nivel III. 2. El significado de cada columna en la tabla de código de función es la siguiente: Código de función Nombre Indica el número de código de función. del Indica el nombre del parámetro del parámetro código de función. Rango de ajuste Indica el rango de ajuste del parámetro. Indica el ajuste predeterminado del Defecto parámetro en la fábrica. Indica la unidad de medida del Unidad parámetro. Indica si el parámetro se puede modificar Propiedad (incluyendo las condiciones de modificación) La propiedad de modificación de los parámetros incluye tres tipos que se describen de la siguiente manera: "☆": El parámetro se puede modificar cuando el controlador está en el estado de parada o funcionamiento . " ★ ": El parámetro no se puede modificar cuando el controlador está en el estado de funcionamiento. "●": El parámetro es el valor realmente medido y no puede modificarse. El sistema limita automáticamente la propiedad de modificación de todos los parámetros para evitar fallos de funcionamiento. 6.2 Grupos de Código de Función En el panel de operación de LED, presione y luego o , y usted puede ver los grupos de códigos de función. Los grupos de códigos de función se clasifican de la siguiente manera: F0 Parámetros básicos F9 F1 Parámetros del motor FA F2 Parámetros de control vectorial Fb Parámetros F3 de control de funcionamiento F4 Parámetros de piso Parámetros F5 de función de Parámetros básicos de ascensor Parámetros F7 de función de prueba F8 Parámetros de configuración del teclado Parámetros Parámetros de función amplidad de función de de función de puerta Parámetros FC protección Fd terminales F6 Parámetros de tiempo Parámetros de comunicación Parámetros de función FE de ascensor FF Parámetros de fábrica FP Parámetros de usuario Parámetro Fr de ajuste de nivelación 6.3 Tabla de código de función Código de funció Nombre del parámetro Rango de ajuste Defecto Unida d n Prop ieda d Grupo F0: Parámetros básicos 0: Vectorial de lazo abierto (SFVC, Sensorless flux vector control ) F0-00 Modo de control 1: Vectorial de lazo cerrado 1 - ★ 1 - ★ 0.050 a F0-04 0.050 m/s ☆ 0.100 a F0-04 1.600 m/s ★ 0.250–4.000 1.600 m/s ★ 300–9999 1000 kg ★ (CLVC, Closed-loop vector control ) 2: Control de voltaje /de frecuencia (V / F) F0-01 Selección de fuente de 0: Control de panel de operación comando 1: Control de distancia Velocidad de F0-02 funcionamiento bajo control de panel de operación F0-03 F0-04 F0-05 Velocidad de funcionamiento Velocidad nominal ascensor Carga nominal del del Código de funció Nombre del parámetro Rango de ajuste Unida Defecto d n Prop ieda d ascensor F0-06 F0-07 Frecuencia máxima Frecuencia de la portadora 20.00–99.00 50.00 Hz ★ 0.5–16.0 6.0 kHz ★ 0 - ★ kW ★ V ★ A ★ Hz ★ RPM ★ Grupo F1: Parámetros del motor 0: Encoder de SIN/COS F1-00 Tipo de encoder 1: Encoder de UVW 2: Encoder incremental de ABZ Potencia motor nominal F1-02 Tensión motor nominal F1-03 Corriente motor nominal F1-04 Frecuencia nominal del 0.00–99.00 motor Depende F1-05 Velocidad de nominal del motor Depende F1-06 del Depende F1-01 del del giro Ángulo inicial del encoder(motor síncrono) 0.7–75.0 0–600 0.00–655.00 0–3000 del modelo Depende del modelo Depende del modelo del modelo modelo 0.0–359.9 0 0.0–359.9 0 0–15 0 del Grado (°) ★ Ángulo del encoder F1-07 cuando no hay alimentación (motor Grado (°) ★ síncrono) F1-08 F1-09 F1-10 Modo de cableado del motor síncrono Coeficientede de filtro de corriente(motor síncrono) Selección de verificación del encoder F1-11 Modo de auto- ajuste F1-12 Impulsos del encoder por vuelta - ★ 0–3 0 - ★ 0–65535 0 - ★ 0 - ★ 0–10000 2048 PPR ★ 0–10.0 1.0 s ★ 0: No hay operación 1: Auto-ajuste con carga 2: Auto-ajuste sin carga 3: Auto-ajuste de ducto Tiempo de detección de F1-13 ruptura de cable de encoder Código de funció Nombre del parámetro Rango de ajuste Defecto Unida d n F1-14 F1-15 F1-16 F1-17 Resistencia del estator(motor asíncrono) Resistencia del rotor(motor asíncrono) Inductancia de fuga(motor asíncrono) Inductancia mutua(motor asíncrono) Depende del 0.000–30.000 modelo Depende del 0.000–30.000 modelo Depende del 0.00–300.00 modelo Depende del 0.1–3000.0 modelo Corriente de F1-18 magnetización(motor Depende del 0.01–300.00 modelo asíncrono) F1-19 F1-20 F1-21 F1-25 Inductancia de eje de Q Prop ieda d Ω ★ Ω ★ mH ★ mH ★ A ★ 0.00–650.00 3.00 mH ★ 0.00–650.00 3.00 mH ★ 0–65535 0 - ★ 1 - ★ 0–100 40 - ★ 0.01–10.00 0.60 s ★ 0.00 a F2-05 2.00 Hz ★ 0–100 35 - ★ 0.01–10.00 0.80 s ★ F2-02 to F0-06 5.00 Hz ★ 10–500 60 - ★ 10–500 30 - ★ Límite máximo de par 0.0–200.0 150.0 % ★ Dirección de marcha de 0: Dirección misma ascensor 1: Dirreción inversa 0 - ★ Coeficiente de corriente 0.20–50.0 15 - ★ (par) Inductancia de eje de D (excitación) Bemf Tipo de Motor 0: Motor asíncrono 1: Motor síncrono Grupo F2: Parámetros de control vectorial F2-00 F2-01 F2-02 F2-03 F2-04 F2-05 F2-06 F2-07 F2-08 F2-10 F2-11 Ganancia proporcional del bucle de velocidad 1 Tiempo integral del bucle de velocidad 1 Frecuencia de conmutación 1 Ganancia proporcional del bucle de velocidad 2 Tiempo integral del bucle de velocidad 2 Frecuencia de conmutación 2 Ganancia proporcional de bucle de corriente Ganancia integral del bucle de corriente Código de funció Nombre del parámetro Rango de ajuste Defecto Unida d n Prop ieda d de servo cero F2-12 F2-13 F2-16 F2-17 F2-18 KP de bucle de velocidad de servo cero KI de bucle de velocidad de servo cero Tiempo de aceleración de par Tiempo de deceleración de par Tiempo de aceleración de arranque 0.00–2.00 0.5 - ★ 0.00–2.00 0.6 - ★ 1–500 1 ms ★ 1–500 350 ms ★ 0.000–1.500 0.000 s ★ 0.000–0.030 0.000 m/s ★ 0.000–0.500 0.000 s ★ Grupo F3: Parámetros de control de funcionamiento F3-00 Velocidad de arranque Tiempo de F3-01 mantenimento de arranque F3-02 Tasa de aceleración 0.200–2.000 0.600 m/s2 ★ F3-03 Tiempo de aceleración 0.300–4.000 en punto de inflexión 1 2.500 s ★ F3-04 Tiempo de aceleración 0.300–4.000 en punto de inflexión 2 2.500 s ★ F3-05 Tasa de deceleración 0.200–1.500 0.600 m/s2 ★ F3-06 Tiempo de deceleración 0.300–4.000 en punto de inflexión 1 2.500 s ★ F3-07 Tiempo de deceleración 0.300–4.000 en punto de inflexión 1 2.500 s ★ 0.500–1.500 0.900 m/s2 ★ 0–90.0 0.0 mm ★ 0.000–0.080 0.040 m/s ★ F3-08 F3-09 F3-10 Velocidad de deceleración especial Distancia de pre-deceleración Velocidad de renivelación F3-11 Velocidad de inspección 0.100–0.630 0.250 m/s ★ F3-12 Posición arriba ralentización 1 de 0.000–300.00 0.00 m ★ F3-13 Posición abajo ralentización 1 de 0.000–300.00 0.00 m ★ F3-14 Posición arriba ralentización 2 de 0.000–300.00 0.00 m ★ F3-15 Posición abajo ralentización 2 de 0.000–300.00 0.00 m ★ Código de funció Nombre del parámetro Rango de ajuste Defecto Unida d Prop ieda d n F3-16 Posición arriba ralentización 3 de F3-17 Posición abajo ralentización 3 de F3-18 0.000–300.00 0.00 m ★ 0.000–300.00 0.00 m ★ Tiempo de salida de velocidad cero en el 0.000–1.000 arranque 0.200 s ★ F3-19 Demora de apertura del 0.000–1.000 freno 0.600 s ★ F3-20 Tiempo de demora al 0.000–1.000 final de funcionmiento 0.300 s ★ 0.080 a F3-11 0.100 m/s ★ 0.100–1.300 0.100 m/s² ★ — ★ Velocidad de F3-21 renivelación de bajavelocidad Tasa de aceleración de F3-22 funcionamiento de rescate F3-24 Selección de funciones del programa 0:Reservado 1:Habilitado para experimentos de 0 deslizamiento Grupo F4: Parámetros de piso F4-00 Ajuste de nivelación 0–60 30 mm ★ F4-01 Piso actual F6-01 to F6-00 1 - ★ 0–65535 1 Pulsos ● 0–65535 34464 Pulsos ● 0–65535 0 Pulsos ★ 0–65535 0 Pulsos ★ 0–65535 0 Pulsos ★ 0–65535 0 Pulsos ★ 0–65535 0 Pulsos ★ 0–65535 0 Pulsos ★ 0–65535 0 Pulsos ★ F4-02 F4-03 F4-04 F4-05 F4-06 F4-07 F4-08 F4-09 F4-10 Byte alto de la posición de piso actual Byte bajo de la posición de piso actual Longitud 1 de la placa de nivelación Longitud 2 de la placa de nivelación Byte alto de la altura del piso 1 Byte bajo de la altura del piso 1 Byte alto de la altura del piso 2 Byte bajo de la altura del piso 2 Byte alto de la altura del piso 3 Código de funció Nombre del parámetro Rango de ajuste Defecto n F4-11 F4-12 F4-13 F4-14 F4-15 F4-16 F4-17 F4-18 F4-19 F4-20 F4-21 F4-22 F4-23 F4-24 F4-25 Byte bajo de la altura del piso 3 Byte alto de la altura del piso 4 Byte bajo de la altura del piso 4 Byte alto de la altura del piso 5 Byte bajo de la altura del piso 5 Byte alto de la altura del piso 6 Byte bajo de la altura del piso 6 Byte alto de la altura del piso 7 Byte bajo de la altura del piso7 Byte alto de la altura del piso 8 Byte bajo de la altura del piso 8 Byte alto de la altura del piso 9 Byte bajo de la altura del piso 9 Byte alto de la altura del piso 10 Byte bajo de la altura del piso 10 Unida d Prop ieda d 0–65535 0 Pulsos ★ 0–65535 0 Pulsos ★ 0–65535 0 Pulsos ★ 0–65535 0 Pulsos ★ 0–65535 0 Pulsos ★ 0–65535 0 Pulsos ★ 0–65535 0 Pulsos ★ 0–65535 0 Pulsos ★ 0–65535 0 Pulsos ★ 0–65535 0 Pulsos ★ 0–65535 0 Pulsos ★ 0–65535 0 Pulsos ★ 0–65535 0 Pulsos ★ 0–65535 0 Pulsos ★ 0–65535 0 Pulsos ★ 0–65535 0 Pulsos ★ 0–65535 0 Pulsos ★ 0–65535 0 Pulsos ★ 0–65535 0 Pulsos ★ Altura del piso 11 a altura del piso 37 F4-80 F4-81 F4-82 F4-83 Byte alto de la altura del piso 38 Byte bajo de la altura del piso 38 Byte alto de la altura del piso 39 Byte bajo de la altura del piso 39 Código de funció Nombre del parámetro Rango de ajuste Defecto Unida d n Prop ieda d Grupo F5: Parámetros de función de terminales Tiempo de conmutación F5-00 entre operador y 3–200 3 s ★ 00: Inválido 33 - ★ - ★ - ★ 4 - ★ 5 - ★ 38 - ★ 39 - ★ 22 - ★ 40 - ★ 09 - ★ 10 - ★ 44 - ★ 45 - ★ 48 - ★ 49 - ★ 50 - ★ 51 - ★ 00 - ★ 00 - ★ 00 - ★ automático F5-01 F5-02 F5-03 F5-04 F5-05 F5-06 F5-07 F5-08 F5-09 F5-10 F5-11 F5-12 F5-13 F5-14 F5-15 F5-16 F5-17 F5-18 F5-19 F5-20 Selección de función de X1 Entrada de NA/NC : Selección de función de 01/33: Señal de nivelación de arriba 35 X2 02/34: Señal de nivelación de abajo Selección de función de 34 03/35: Señal de área de puerta X3 Selección de función de 04/36: Señal de realimentación del X4 circuito de seguridad Selección de función de 05/37: Señal de retroalimentación X5 de circuito de bloqueo de puerta Selección de función de 06/38: Señal de retroalimentación X6 de contactor de RUN Selección de función de 07/39: Señal de retroalimentación X7 Selección de función de de contactor de freno X8 08/40: Señal de Inspección Selección de función de 09/41: Señal de Inspección arriba X9 10/42: Señal de Inspección abajo Selección de función de 11/43: Señal de emergencia de X10 incendi Selección de función de 12/44: Señal de límite arriba X11 13/45: Señal de límite abajo Selección de función de 14/46: Señal de sobrecarga X12 Selección de función de 15/47: Señal de plena carga X13 16/48: Señal de desaceleración Selección de función de arriba1 X14 17/49: Señal de desaceleración Selección de función de abajo1 X15 18/50: Señal de desaceleración Selección de función de arriba 2 X16 Selección de función de 19/51: Señal de desaceleración X17 abajo 2 Selección de función de 20/52: Señal de desaceleración X18 arriba 3 Selección de función de 21/53: Señal de desaceleración X19 abajo 3 Selección de función de 22/54: Señal de retroalimentación X20 Código de funció Nombre del parámetro Rango de ajuste Defecto Unida d n F5-21 F5-22 F5-23 Selección de función de de cortocircuitar el contactor de X21 circuito de bloqueo de puerta Selección de función de 23/55: Señal del interruptor de X22 bombero Selección de función de 24/56: Señal de cortina de luz de X23 máquina de la puerta 1 Prop ieda d 00 - ★ 00 - ★ 00 - ★ Selección de función de de máquina de puerta 1 00 X24 66/98: Señal de borde de seguridad - ★ - ★ 25/57: Señal de cortina de luz de máquina de la puerta 2 26/58: Señal de retroalimentación de contactor de freno 1 27/59: Señal válida de UPS 28/60: Señal de bloqueo de ascensor 29/61: Señal de realimentación de circuito de seguridad 2 30/62: Señal de realimentación de cortocircuitar el estator de PMSM 31/63: Señal de realimentación de circuito de bloqueo de puerta 2 32/64: Reservado 65/97: Señal de borde de seguridad F5-24 de máquina de puerta 2 67/99:Señal de sobrecalentamiento del motor 68/100: Señal de terremoto 69/101: Señal de puerta trasera prohibida 70/102: Señal de carga ligera 71/103: Señal de media carga 72/104: Señal de conmutación de piso de emergencia de incendio 76/108:Señal de entrada de apertura de puerta 1 77/109:Señal de entrada de apertura de puerta 2 78/110:Señal de retroalimentación de contactor de freno 2 F5-25 Tipo de entrada de CTB 0–511 320 Código de funció Nombre del parámetro Rango de ajuste Defecto Unida d Prop ieda d n F5-26 F5-27 F5-28 F5-29 F5-30 Selección de función de 0: Inválido Y1 1: Control del contactor de RUN Selección de función de 2: Control del contactor de freno 3: Control del contactor de Y2 Selección de función de Y3 1 - ★ 2 - ★ 3 - ★ 4 - ★ 0 - ★ 0 - ★ - - ● 0 - ★ cortocircuitar el circuito de bloqueo de puerta 4: Señal de retroalimentación de la Selección de función de llegada de piso de emergencia de incendio Y4 Selección de función de 5: Apertura de máquina de puerta 1 6: Cierre de máquina de puerta 1 Y5 7: Apertura de máquina de puerta 2 8: Cierre de máquina de puerta 2 9: Contactores de freno y de RUN normales 10: Estado de fallo 11: Monitor de funcionamiento 12: Cortocircuitar el contactor del estator PMSM 13: Conmutación automática de evacuación de emergencia 14: Systema normal F5-31 Selección de función de 15: Control de zumbador de Y6 emergencia 16: Arranque de alto voltaje del freno 17: Funcionamiento de ascensor en dirección hacia arriba 18: Ventilador en funcionamiento 19: Esterilización médica 20: Para en zona donde no hay puerta 21: Cerradura eléctrica 22: Estado sin servicio F5-32 F5-33 Visualización de estado de comunicación Control terminal de programa Monitoreo del estado de comunicación de CANbus y Modbus Bit3: Requisito de emergencia de incendio de ascensor para Hong Kong Código de funció Nombre del parámetro Rango de ajuste Defecto Unida d Prop ieda d n Bit4: Llegada de gong desactivada en la noche Bit6: Bloqueo de puerta desconectado en la conmutación de inspección a funcionamiento normal Bit7: Código de error no aparece en el teclado Bit8: Comando de apertura de puerta inmediatamente cancelado en el límite de apertura de puerta Bit9: Retención de parada de coche y de par a velocidad de cero en la retroalimentación anormal de frenado F5-34 Visualización de estado de terminales Monitoreo de terminales de E / S en F5-35 Visualización de estado de terminales Monitoreo de terminales de E / S en MCB CTB, CCB y HOP - - ● - - ● 1 - ★ 0 - ★ 0 - ★ 0 - ★ 9 - ★ 0: Entrada digital de MCB F5-36 Selección de entrada de 1: Entrada digital de CTB célula de carga 2: Entrada analógica de CTB 3: Entrada analógica de MCB F5-37 F5-38 F5-39 Selección de función de 0: Inválido X25 Selección de función de 4: Señal de circuito de seguridad X26 5: Señal del circuito de bloqueo de Selección de función de puerta X27 Grupo F6: Parámetros básicos de ascensor F6-00 Piso superior ascensor F6-01 Fondo piso del ascensor 1 a F6-00 1 - ★ F6-02 Piso de aparcamiento F6-01 a F6-00 1 - ★ F6-03 Piso de emergencia de F6-01 a F6-00 incendio 1 - ★ F6-04 Piso de ascensor F6-01 a F6-00 1 - ★ F6-05 Pisos de servicio 1 0–65535 65535 - ★ F6-06 Pisos de servicio 2 0–65535 65535 - ★ F6-07 Número de ascensores en el modo de grupo 1 - ★ bloqueo del de F6-01 a 40 1–8 Código de funció Nombre del parámetro Rango de ajuste Defecto Unida d n F6-08 No. De ascensor 1–8 Prop ieda d 1 - ★ 0 - ★ 14 ms ★ 8448 - ★ Bit0: Espera dispersa Bit3: Paralelo / en grupo en CAN2 Bit4: Control paralelo en compatibilidad con NICE3000 Bit6: Elimina número de piso y indica dirección por adelantado F6-09 Control de programa de ascensor Bit8: Botón único de llamada de piso Bit9:No detecta interrupción de analógico Bit10: Juicio de Err30 a la cancelación de renivelación Bit14: Detección de Intervalo de tiempo de circuito de seguridad 2 y el circuito de bloqueo de la puerta 2 F6-10 Tiempo de filtro de sensor de nivelación 10–50 Bit1: Regreso desactivado a piso de base para verificación Bit2: Cancelación de organización automática secuencial de llamadas de piso por visualizar Bit5: Detección de corriente válida en el arranque de motor síncrono Bit6: Inversión de salida de lámpara de MCB Bit7: Apertura de puerta válida en F6-11 Selección de función de zona sin puerta en el estado de ascensor inspección Bit8: Abrir la puerta de una vez después de que la inspección de primera vez se vuelva a la normalidad Bit10: Zumbador no pía sobre renivelación Bit11: Función de piso super corto Bit13: Reajuste auto de fallo de Err53 Bit14: Desaceleración de arriba no Código de funció Nombre del parámetro Rango de ajuste Defecto Unida d n Prop ieda d restablecida para piso súper corto Bit15: Desaceleración de abajo no restablecida para piso súper corto F6-12 Piso de VIP 0 a F6-00 0 - ★ F6-13 Piso de seguridad 0 a F6-00 0 - ★ F6-14 F6-15 F6-16 F6-17 Hora de inicio de abajo selectiva colectiva 1 Hora de final de abajo selectiva colectiva 1 Hora de inicio de abajo selectiva colectiva 2 Hora de final de abajo selectiva colectiva 2 Hora F6-18 de inicio 00.00–23.59 00.00 00.00–23.59 00.00 00.00–23.59 00.00 00.00–23.59 00.00 00.00–23.59 00.00 del servicio de piso basado en el tiempo 1 Hora de final del servicio F6-19 de piso basado en el 00.00–23.59 HH.M M HH.M M HH.M M HH.M M HH.M M HH.M 0 M tiempo 1 ☆ ☆ ☆ ☆ ☆ ☆ Piso de servicio 1 de F6-20 servicio de piso basado 0–65535 65535 - ☆ 0–65535 65535 - ☆ en el tiempo 1 F6-21 Piso de servicio 2 de servicio de piso basado en el tiempo 1 Hora F6-22 de inicio del servicio de piso basado 00.00–23.59 00.00 00.00–23.59 00.00 en el tiempo 2 Hora de final del servicio F6-23 de piso basado en el tiempo 2 HH.M M HH.M M ☆ ☆ Piso de servicio 1 de F6-24 servicio de piso basado 0–65535 65535 - ☆ 0–65535 65535 - ☆ en el tiempo 2 F6-25 Piso de servicio 2 de servicio de piso basado en el tiempo 2 F6-26 Hora de inicio de pico 1 00.00–23.59 0 F6-27 Hora de final de pico 1 00.00–23.59 0 HH.M M HH.M M ☆ ☆ Código de funció Nombre del parámetro Rango de ajuste Defecto Unida d n Prop ieda d F6-28 Piso de pico 1 F6-01 a F6-00 F6-29 Hora de inicio de pico 2 00.00–23.59 00.00 F6-30 Hora de final de pico 2 00.00–23.59 00.00 F6-31 Piso de pico 2 F6-01 a F6-00 1 - ★ F6-35 Piso de sercicio 3 0–65535 65535 - ☆ F6-36 Piso de servicio 3 de servicio de piso basado en el tiempo 1 0–65535 65535 - ☆ F6-37 Piso de servicio 3 de servicio de piso basado en el tiempo 2 0–65535 65535 - ☆ F6-38 F6-39 Hora de inicio de bloqueo de ascensor Hora de final de bloqueo de ascensor 1 - 00.00–23.59 00.00 00.00–23.59 00.00 HH.M M HH.M M HH.M M HH.M M ★ ☆ ☆ ☆ ☆ Bit0: Función de discapacidad Bit1: Función de límite suave Bit2: Entrada de JP16 se utiliza como selección de puerta trasera(botón) Bit3: Entrada de JP16 se utiliza como señal de apertura de puerta trasera Bit4: Apertura de una sola puerta de puertas opuestas bajo control manual F6-40 Selección de programa Bit5: Bloqueo del elevador del control 1 temporizado Bit6: Puerta manual Bit7: Reservado Bit9: Desactivación de eliminación inversa de número de piso Bit10: Visualización de el próximo número de piso que va a llegar Bit11: Respuesta primero a llamadas de cabina Bit12: Mando asistado de llamada de cabina en una sola puerta se utiliza como función de 0 - ★ Código de funció Nombre del parámetro Rango de ajuste Defecto Unida d n Prop ieda d discapacidad Bit13: Mando plegable utilizado como función de discapacidad 1 y función de puerta trasera 0 Bit14: Plegadura de comando de llamada de coche Bit15: JP20 se utiliza como la conmutación de la puerta trasera (interruptor) Bit2: Para forzada en inspección debido a la deceleración 1 Bit4: Zumbador pía durante la demora de apertura de la puerta Bit6: Cancelación de demora de apertura de puerta Bit8: Bloqueo de ascensor a la apertura de puerta F6-41 Selección de programa del control 2 Bit9: Indicador disponible en bloqueo del elevador 0 - ★ 0 - ★ Bit10:Bloqueo de sscensor en el estado de operador Bit11:Parpadea a la llegada (dentro del tiempo establecido en F6-47) Bit12: Puerta vuelve a abrir durante la demora de apertura de puerta Bit13: Puerta vuelve a abrir después de la llamada de coche del piso actual Bit1: Cancelación de mando de apertura / cierre en la demora después del límite de apertura / cierre de puerta Bit2: No juezga el estado de F6-42 Selección de programa bloqueo de puerta en la salida de del control 2 cierre de puerta Bit3: Da salida de comando de cierre de puerta durante el funcionamiento Bit4:En la primera vez de encenderse vuelve al piso de base Código de funció Nombre del parámetro Rango de ajuste Defecto Unida d n Prop ieda d para comprobar Bit5:En el bloqueo de ascensor para en el piso cercano bit0:Llamadas canceladas después de entrar en estado de operador bit1: No responde a llamadas de piso bit2: Conmutación entre el estado de operador / automático F6-43 Selección de función de operador bit3: Cierre la puerta al trote bit4: Cierre automático de la puerta 0 - ★ - ★ bit5: Zumbador pía a intervalos en el estado de operador bit6: Zumbador pía constantemente en el estado de operador Bit7:Selección de función de aviso de parpadeo de botón de llamada de coche Bit3: Salida de gong de llegada en el estado de inspección o de emergencia de incendio Bit4:Múltiples llamadas de cabina registradas en el estado de emergencia de incendio Bit5: Retentivo al corte del suministro eléctrico en el estado de emergencia de incendio Bit6: Cierre la puerta manteniendo F6-44 Selección de función de pulsado el botón de cierre de emergencia de incendios puerta Bit7: Reservado Bit8: Cierre la puerta durante el registro de llamada de coche Bit9: Mostrando llama de piso en el estado de emergencia de incendio Bit10:Funcionamiento forzado por bombero Bit11: Salir de estado de emergencia de incendio para los bomberos 16456 Código de funció Nombre del parámetro Rango de ajuste Defecto Unida d n Prop ieda d Bit12:No eliminar las llamadas de cabina en la segunda vez de abrir la puerta el estado de bombero Bit14: Abrir la puerta manteniendo pulsado el botón de apertura de puerta Bit15: Se abre la puerta automáticamente en el piso de base de emergencia de incendio Bit0-Bit1: Modo de determinar la dirección (00: Calcular la dirección automáticamente; 01: Determinación de dirección de carga ; 10: Dirección de piso de aterrizaje más cercano) Bit2: Parar en piso de aparcamiento de evacuación ( de lo contrario parar en piso de servicio más cercano) Bit3: Reservado Bit4: Compensación en el arranque (si es válida o no en la emergencia Selección de función de de incendio) F6-45 evacuación emergencia de Bit8: Protección de tiempo de funcionamiento de emergencia Bit10: Salida del zumbador de emergencia Bit12: Modo de frenado de cortocircuitar el estator conmutado al accionamiento de controlador Bit13: Modo de conmutación de modo de frenado de cortocircuitar el estator al accionamiento de controlador (0:Establecido por tiempo ,1: Establecido por velocidad de conmutación de modo de frenado de cortocircuitar el estator al accionamiento de controlador) 0 - ★ Código de funció Nombre del parámetro Rango de ajuste Defecto Unida d n Prop ieda d Bit14: Modo de salida de evacuación de emergencia(1:Sale en el límite de cierre de puerta 0: Sale en el límite de apertura de puerta) Bit15: Selección de función de modo de frenado de cortocircuitar el estator Bit0: VIP habilitada por llamada de F6-46 Selección de función de VIP piso (en el piso de VIP ) Bit1: VIP habilitado por el terminal 0 s ★ 0 s ☆ 0.010 m/s ★ 0 a F6-01 0 - ★ 0 a F6-00 0 - ☆ 0 a F6-00 0 - ☆ 0 to F6-00 0 - ☆ 0–60000 0 - ☆ 0 - ☆ 0 - ☆ 0 - ☆ 0 - ☆ Bit8: Número de llamadas de coche de VIP limitado F6-47 Tiempo de avance de parpadeo 0.0–15.0 Velocidad de F6-48 conmutación de 0.010–0.630 evacuación de emergencia F6-49 Piso de aparcamiento de evacuación Grupo F7: Parámetros de función de prueba F7-00 F7-01 F7-02 F7-03 F7-04 F7-05 Piso de llamada de coche registrado Piso de llamada de arriba registrado Piso de llamada de abajo registrado Veces de funcionamiento aleatorio Llamada de piso habilitada Apertura 0: Sí 1: No de puerta habilitada F7-06 Función de sobrecarga F7-07 Interruptor de límite 0: Sí 1: No 0: Prohibido 1: Permitido 0: Habilitado Código de funció Nombre del parámetro Rango de ajuste Defecto Unida d n Prop ieda d 1: Discapacitado F7-08 Intervalo de tiempo de 0–1000 0 s ☆ 0–100 0 % ★ 0 - ★ 0.0–100.0 50.0 % ★ 0.00–2.00 0.60 - ★ 0.00–2.00 0.60 - ★ funcionamiento aleatorio Grupo F8: Parámetros de función ampliada F8-00 Carga para auto-ajuste de celular de carga 0: Pre-par inválido 1: Compensación de pre-par de F8-01 Selección de pre-par célula de carga 2: Compensación automática de pre-par F8-02 F8-03 F8-04 F8-05 F8-06 F8-07 Desplazamiento de pre-par Ganancia de accionmiento Ganancia de freno Carga de la cabina 0–1023 actual Ajuste de sin carga de coche Ajuste de plena carga de coche - 0 ● 0–1023 0 - ★ 0–1023 100 - ★ 0 - ☆ 0.050 m/s ★ 0 - ★ 0.200 s ★ 0: Función de anti-molestia deshabilitada 1: Molestia juzgada por la célula de F8-08 Función de anti-molestia carga 2: Molestia juzgada por la cortina de luz 4: Molestia juzgada por la señal de carga ligera Velocidad de operación F8-09 de evacuación de 0.000–F3-11 emergencia en el corte de energía Modo de operación de 0: Motor no funciona F8-10 evacuación emergencia en el corte 2: Suministro de energía de batería de energía F8-11 de 1: UPS Tiempo de de 48 V 0.200 ~ 1.500 Código de funció Nombre del parámetro Rango de ajuste Defecto Unida d Prop ieda d n mantenimiento de velocidad de cero en la liberación de freno F8-12 F8-14 Piso de emergencia de incendio 2 0 ~ F6-00 0 - ★ 0 - ☆ 0–40 0 - ☆ 0–1 0 - ☆ 0–240 10 min ☆ 0–240 2 min ☆ 0–45 45 s ★ Configuración de Bit4: Ahorro de energía de la comunicación de HCB comunicación de HCB Dirección de inicio de F8-16 mando auxiliar de llamada de piso Comprobación de la F8-17 dirección de llamada de piso Grupo F9: Parámetros de tiempo F9-00 Tiempo ocioso antes de volver al piso de base Tiempo para que el F9-01 ventilador y la lámpara se apaguen F9-02 Límite de tiempo de funcionamiento del motor F9-03 Reloj: año 2000–2100 Año actual F9-04 Reloj: mes 1–12 Mes actual MM ☆ F9-05 Reloj: día 1–31 Día actual DD ☆ F9-06 Reloj: hora 0–23 Hora actual HH ☆ F9-07 Reloj: minuto 0–59 Minuto actual MM ☆ F9-09 F9-11 F9-12 F9-13 Tiempo acumulativo de funcionamiento Byte alto de veces de funcionamiento Byte bajo de veces de funcionamiento Detección de días de mantenimiento YYYY ☆ 0–65535 0 h ● 0–9999 0 - ● 0–9999 0 - ● 0 ~ 99 0 día ★ 3 - ☆ Grupo FA: Parámetros de configuración del teclado 0: Visualización invertida de piso FA-00 Selección de indicador del teclado físico 1: Visualización positiva de piso físico 2: Visualización invertida de piso de Código de funció Nombre del parámetro Rango de ajuste Defecto Unida d Prop ieda d n llamada de piso 3: Visualización positiva de piso de llamada de piso FA-01 FA-02 Indicador en estado de 1–65535 funcionamiento Indicador en estado de 65535 - ☆ - ☆ 1–65535 65535 FA-03 Ángulo actual de encoder 0.0–359.9 0.0 FA-05 Versión de software (ZK) 0–65535 0 - ● FA-06 Versión de software (DSP) 0–65535 0 - ● FA-07 parada Temperatura del disipador de calor FA-11 Corriente de pre-par 0–100 Grado( °) C 0 ● ● 0.0–200.0 0 % ● 0 ~ 65535 0 - ● 0–65535 0 - ● 0.000–4.000 0 m/s ● 0.000–4.000 0 m/s ● FA-16 Tensión del bus 0–999.9 0 V ● FA-17 Posición actual 0.00–300.0 0 m ● FA-18 Corriente de salida 0.0–999.9 0 A ● FA-19 Frecuencia de salida 0.00–99.99 0 Hz ● FA-20 Corriente de par 0.0–999.9 0 A ● 0–999.9 0 V ● 0–100 0 % ● 0.00–99.99 0 kW ● 0–65535 0 - ● FA-26 Estado de entrada 1 0–65535 0 - ● FA-27 Estado de entrada 2 0–65535 0 - ● FA-28 Estado de entrada 3 0–65535 0 - ● FA-30 Estado de entrada 5 0–65535 0 - ● FA-31 Estado de salida1 0–65535 0 - ● FA-12 Información lógica FA-13 Información de curva FA-14 Velocidad ajustada FA-15 Velocidad de realimentación FA-21 Tensión de salida FA-22 Par de salida FA-23 Potencia de salida FA-24 Interferencia Comunicación de Código de funció Nombre del parámetro Rango de ajuste Defecto Unida d Prop ieda d n FA-32 Estado de salida 2 0–65535 0 - ● 0–65535 0 - ● FA-34 Estado de salida de coche 0–65535 0 - ● FA-35 Estado de sala 0–65535 0 - ● FA-36 Estado del sistema 1 0–65535 0 - ● FA-37 Estado del sistema 2 0–65535 0 - ● 0–65535 (pisos 1–16) 0 - ● 0–65535 (pisos 17–32) 0 - ● 0–65535 (pisos 33–40) 0 - ● 1–2 1 - ★ 00–999 0 - ● 0–65535 65535 - ☆ 0–65535 65535 - ☆ 0–65535 65535 - ☆ 0–65535 65535 - ☆ 5–99 10 s ☆ 0–1000 0 ms ☆ 5–99 15 s ☆ 0–20 0 - ☆ 1: Esperando con la puerta abierta 0 - ☆ FA-33 FA-46 FA-47 FA-48 Estado de entrada de coche Estado de comunicación de llamada de piso 1 Estado de comunicación de llamada de piso 2 Estado de comunicación de llamada de piso 3 Grupo FB: Parámetros de función de puerta Fb-00 Fb-01 Fb-02 Fb-03 Fb-04 Fb-05 Fb-06 Fb-07 Fb-08 Fb-09 Número de máquina de puerta(s) Software de CTB Pisos de servivio 1 de máquina de puerta 1 Pisos de servivio 2 de máquina de puerta 1 Pisos de servivio 1 de máquina de puerta 2 Pisos de servivio 2 de máquina de puerta 2 Tiempo de protección de apertura de puerta Retardo de salida de gong de llegada Tiempo de protección de cierre de puerta Veces de apertura/ cierre de puerta 0: Cerrar la puerta de forma normal Fb-10 Estado de puerta del ascensor de espera en el piso de base en el piso de base 2: Esperando con la puerta abierta Código de funció Nombre del parámetro Rango de ajuste Defecto Unida d n Prop ieda d en cada piso Tiempo de Fb-11 mantenimiento de apertura de puerta para 1–1000 5 s ☆ 1–1000 3 s ☆ 1–1000 10 s ☆ 10–1000 30 s ☆ 10–1000 30 s ☆ 1–60 5 s ☆ 5–180 120 s ☆ 0–65535 65535 - ☆ 0–65535 65535 - ☆ 0 - ★ 65 - ★ llamadas de piso Tiempo de Fb-12 mantenimiento de apertura de puerta para llamadas de cabina Tiempo de Fb-13 mantenimiento de apertura de puerta en el piso de base Fb-14 Retardo de apertura de puerta Tiempo de Fb-15 mantenimiento especial de apertura de puerta Tiempo de Fb-16 mantenimiento de apertura manual de puerta Tiempo de Fb-17 mantenimiento de cierre forzado de puerta Fb-18 Fb-19 Pisos de servivio 3 de máquina de puerta 1 Pisos de servivio 3 de máquina de puerta 2 Grupo de FC: Parámetros de función de protección Bit0: Detección de cortocircuito a Control FC-00 para de la programa función de protección tierra en el encendido Bit2: Desaceleración a parar en la cortina de luz válida Bit9: Modo sin límite de apertura / cierre de puerta Control de programa 2 FC-01 para la protección función de Bit0: Protección de sobrecarga Bit1: Cancelación de protección en la pérdida de fase de salida Bit4: Juicio de cortina de luz en el Código de funció Nombre del parámetro Rango de ajuste Defecto Unida d Prop ieda d n límite de cierre de puerta Bit5: Cancelación de juicio de comunicación de DSP Bit14: Cancelación de protección en la pérdida de fase de entrada Coeficiente de FC-02 protección de 0.50–10.00 1.00 - ★ 50–100 80 % ★ 0–3 0 - ★ 0–99 0 - ☆ 0–9999 0 - ● 0–65535 0 - ● 0–1231 0 0–23.59 0 0–65535 0 - ● 0–65535 0 - ● 0.000–4.000 0 m/s ● 0.000–4.000 0 m/s ● 0.0–999.9 0 v ● 0.0–300.0 0 m ● 0.0–999.9 0 A ● 0.00–99.99 0 Hz ● 0.0–999.9 0 A ● sobrecarga FC-03 FC-04 FC-06 FC-07 FC-08 FC-09 FC-10 FC-11 FC-12 FC-13 Coeficiente de preaviso de sobrecarga Selección de puerta opuesta Fallo designado Código de fallo designado Subcódigo de error designado Mes y día de fallo designado Hora y minuto de fallo designado Información lógica de fallo designado Información de curva de fallo designado Velocidad ajustada a fallo designado MM.D D HH.M M ● ● Velocidad de FC-14 retroalimentación a fallo designado FC-15 FC-16 FC-17 FC-18 FC-19 Tensión de bus a fallo designado Posición actual a fallo designado Corriente de salida a fallo designado Frecuencia de salida a fallo designado Corriente de par a fallo designado Código de funció Nombre del parámetro Rango de ajuste Defecto Unida d Prop ieda d n FC-20 FC-21 FC-22 FC-23 FC-24 FC-25 FC-26 FC-27 FC-28 FC-29 FC-30 FC-31 FC-32 FC-33 FC-34 FC-35 Primer código de fallo Primer subcódigo de error Mes y día de primer fallo Hora y minuto de primer fallo Segundo código de fallo Segundo subcódigo de error Mes y día de segundo fallo Hora y minuto de segundo fallo Tercer código de fallo Tercer subcódigo de error Mes y día de tercer fallo Hora y minuto de tercer fallo Cuarto código de fallo Cuarto subcódigo de error Mes y día de cuarto fallo Hora y minuto de cuarto fallo 0–9999 0 - ● 0–65535 0 - ● 0–1231 0 0–23.59 0 0–9999 0 - ● 0–65535 0 - ● 0–1231 0 0–23.59 0 0–9999 0 - ● 0–65535 0 - ● 0–1231 0 0–23.59 0 0–9999 0 - ● 0–65535 0 - ● 0–1231 0 0–23.59 0 MM.D D HH.M M MM.D D HH.M M MM.D D HH.M M MM.D D HH.M M ··· FC-56 FC-57 FC-58 FC-59 FC-60 FC-61 Décimo código de fallo Décimo subcódigo de error Mes y día de décimo fallo Hora y minuto de décimo fallo Último código de fallo Último subcódigo de error ● ● ● ● ● ● ● ● ● 0–9999 0 - ● 0–65535 0 - ● 0–1231 0 0–23.59 0 0–9999 0 - ● 0–65535 0 - ● MM.D D HH.M M ● ● Código de funció Nombre del parámetro Rango de ajuste Defecto Unida d Prop ieda d n FC-62 FC-63 FC-64 FC-65 FC-66 Mes y día de último fallo Hora y minuto de último fallo Información lógica de último fallo Información de curva de último fallo Velocidad ajustada a último fallo MM.D 0–1231 0 0–23.59 0 0–65535 0 - ● 0–65535 0 - ● 0.000–4.000 0 m/s ● 0.000–4.000 0 m/s ● 0.0–999.9 0 v ● 0.0–300.0 0 m ● 0–999.9 0 A ● 0.00–99.99 0 Hz ● 0.0–999.9 0 A ● 0 bps ★ D HH.M M ● ● Velocidad de FC-67 retroalimentación a último fallo FC-68 FC-69 FC-70 FC-71 FC-72 Tensión de bus a último fallo Posición actual a último fallo Corriente de salida a último fallo Frecuencia de salida a último fallo Corriente de par a último fallo Grupo Fd: Parámetros de comunicación 0: 9600 FD-00 Velocidad de transmisión FD-02 Dirección local 0–127 1 - ★ FD-03 Retardo de respuesta de comunicación 0–20 10 ms ★ FD-04 Tiempo de espera de comunicación 0.0–60.0 0.0 s ★ 0.00–2.00 0.00 s ★ 1 - ★ 2 - ★ FD-05 1: 38400 Retardo de parada de re-nivelación 0: Inválido FD-07 HCB: entrada de JP1 Entrada de NA/NC : 1/33: Señal de bloqueo de ascensor 2/34: Señal de emergencia de incendio FD-08 HCB: entrada JP2 3/35: Piso actual prohibido 4/36: Señal de piso de VIP Código de funció Nombre del parámetro Rango de ajuste Defecto Unida d n Prop ieda d 5/37: Señal de piso de seguridad 6/38: Entrada de botón de cierre de puerta 7/39: Entrada de la segunda capa de fuego en piso FD-09 HCB: salida de JP1 FD-10 HCB: salida de JP2 0: Inválido 1: Indicador de llegada de arriba 2: Indicador de llegada de abajo 3: Salida de fallo 4: Salida de parada en área sin puerta 5: Salida de estado de no-servicio 1 - ★ 2 - ★ 0 - ★ 0 - ★ 0 - ★ 0 - ★ 0 - ★ 0 - ★ 6: Salida de indicador de botón de cierre de puerta FD-11 HCB-B: Salida de JP1 FD-12 HCB-B: Salida de JP2 FD-13 HCB-B: Salida de JP3 FD-14 HCB-B: Salida de JP4 FD-15 HCB-B: Salida de JP5 FD-16 HCB-B: Salida de JP6 0: Inválido Entrada de NA/NC: 1/33: Señal de carga ligera 2/34: Señal de media carga 3/35: Selección de puerta 2 4/36: Puerta 2 restringida (puerta trasera prohibida) 5/37: Borde de seguridad de puerta 1 6/38: Borde de seguridad de puerta 2 7/39: Selección de puerta simple/doble FD-17 HCB-B: Entrada de A1 0: Reservado 0 - ★ FD-18 HCB-B: Entrada de A2 1: Salida de fallo 0 - ★ FD-19 HCB-B: Entrada de B1 2: Sailida de parada en área sin 0 - ★ FD-20 HCB-B: Entrada de B2 puerta 0 - ★ FD-21 HCB-B: Entrada de C1 3: Salida de estado de no-servicio 0 - ★ FD-22 HCB-B: Entrada de C2 4:Salida de emergencia de incendio 0 - ★ HCB-B: Entrada de C3 5: Salida de emergencia de fallo de 0 - ★ FD-23 FD-24 FD-25 FD-26 HCB-B: Entrada de C4 alimentación 0 - ★ HCB-B: Entrada de C5 6: Bloqueo de puerta válido 0 - ★ HCB-B: Entrada de C6 7: Señal de salida de noche 0 - ★ 0 - ★ Grupo FE: Parámetros de función de ascensor FE-00 Modo de selectivo colectivo 0: Selectivo colectivo completo 1: Selectivo colectivo abajo 2: Selectivo colectivo arriba FE-01 Indicador de piso 1 Lao dos altos dígitos indican el 1901 - ☆ FE-02 Indicador de piso 2 código de visualización de dígitos 1902 - ☆ Código de funció Nombre del parámetro Rango de ajuste Defecto Unida d n Prop ieda d FE-03 Indicador de piso 3 de las decenas, y los dos dígitos 1903 - ☆ FE-04 Indicador de piso 4 bajos indican el código de 1904 - ☆ FE-05 Indicador de piso 5 visualización de dígitos de la 1905 - ☆ FE-06 Indicador de piso 6 unidad. 1906 - ☆ FE-07 Indicador de piso 7 00: Muestra "0" 1907 - ☆ FE-08 Indicador de piso 8 01: Muestra "1" 1908 - ☆ FE-09 Indicador de piso 9 02: Muestra "2" 1909 - ☆ Indicador de piso 10 03: Muestra "3" 0100 - ☆ Indicador de piso 11 04: Muestra "4" 0101 - ☆ 0102 - ☆ 0103 - ☆ 0104 - ☆ FE-10 FE-11 FE-12 FE-13 FE-14 FE-15 Indicador de piso 12 Indicador de piso 13 Indicador de piso 14 Indicador de piso 15 Indicador de piso 16 a piso 30 FE-31 Indicador de piso 31 FE-35 Indicador de piso 32 FE-36 Indicador de piso 33 FE-37 Indicador de piso 34 FE-38 Indicador de piso 35 FE-39 Indicador de piso 36 FE-40 Indicador de piso 37 FE-41 Indicador de piso 38 FE-42 Indicador de piso 39 FE-43 Indicador de piso 40 FE-52 FE-53 FE-54 FE-55 05: Muestra "5" 06: Muestra "6" 07: Muestra "7" 08: Muestra "8" 09: Muestra "9" 10: Muestra "A" 0105 ☆ 0301 - ☆ 0302 - ☆ 0303 - ☆ 0304 - ☆ 0305 - ☆ 0306 - ☆ 0307 - ☆ 0308 - ☆ 0309 - ☆ 20: Muestra "12" 0400 - ☆ Selección de dígito más 21: Muestra "13" alto1 0 - ☆ 22: Muestra "23" Selección de dígito más 23: Muestra "C" alto 2 0 - ☆ 24: Muestra "D" Selección de dígito más 25: Muestra "E" alto 3 0 - ☆ 26: Muestra "F" Selección de dígito más 27: Muestra "I" alto 4 0 - ☆ 28: Muestra "J" 0 - ☆ 11: Muestra "B" 12: Muestra "G" 13: Muestra "H" 14: Muestra "L" 15: Muestra "M" 16: Muestra "P" 17: Muestra "R" 18: Muestra "-" 19: No muestra 29: Muestra "K" 30: Muestra "N" FE-56 Selección de dígito más alto 5 31: Muestra "O" 32: Muestra "Q" 33: Muestra "S" 34: Muestra "T" 35: Muestra "U" Código de funció Nombre del parámetro Rango de ajuste Defecto Unida d n Prop ieda d 36: Muestra "V" 37: Muestra "W" 38: Muestra "X" 39: Muestra "Y" 40: Muestra "Z" 41: Muestra "15" 42: Muestra "17" 43: Muestra "19" Bit2: Función de re-nivelación Bit3:Función de pre-apertura de puerta Bit4: Cancelación de llamada pegada de piso Bit5: Función del piso de seguridad nocturno Bit6: Servicio de pico de colectivo FE-32 Selección de función de ascensor 1 selectivo abajo Bit7: Servicio de pico en modo 34816 - ☆ 36 - ☆ paralelo/ de grupo Bit8: Función del piso de servicio basada en el tiempo Bit9: Función de VIP Bit11: Eliminación de llamada coche Bit12: Eliminación de llamada de piso Bit15: Reservado Bit1: Mantenimiento de apertura de puerta en el límite de apertura Bit2: No emite comando de cierre de puerta hasta límite de cierre de puerta FE-33 Selección de función de ascensor 2 Bit4: Restablecimiento automático de contactor pegado de RUN y de freno Bit5: Detección de interruptor de desaceleración pegado Bit7: Cierre forzado de puerta Bit8: Contactor de cortocircuito del estator del motor NA Código de funció Nombre del parámetro Rango de ajuste Defecto Unida d n Prop ieda d Bit9: Para inmediata a renivelación Bit13: Función de protección del ascensor de alta velocidad Bit15: Control independiente de puerta opuesta Grupo Fr: Parámetros de ajuste de nivelación Fr-00 Fr-01 Fr-02 Función de ajuste de 0: Deshabilitado nivelación 1: Habilitado Registro de ajuste de nivelación 1 Registro de ajuste de nivelación 2 00000–60060 … Fr-20 0 - ★ 30030 mm ★ 30030 mm ★ 30030 mm ★ 0 - ☆ 0 - ★ 0 - ★ … Registro de ajuste de nivelación 20 Grupo FF: Parámetros de fábrica Grupo FP: Parámetros de usuario FP-00 Contraseña de usuario 0: Indica que no hay contraseña 01–65535 0: Inválido FP-01 Actualización de 1: Restaurar ajustes por defecto parámetros 2: Eliminar información de la memoria Detección de los FP-02 parámetros definidos por el usuario 0: Inválido 1: Válido Capítulo 7 Descripción de códigos de función Grupo F0: Parámetros básicos Código de función Nombre del Defect Rango de ajuste parámetro o Unidad Propieda d 0: Vectorial de lazo abierto (SFVC, Sensorless flux vector control ) F0-00 Modo de control 1: Vectorial de lazo cerrado 1 (CLVC, Closed-loop vector - ★ control ) 2: Control de voltaje /de frecuencia (V / F) Se utiliza para establecer el modo de control del sistema. 0: Vectorial de lazo abierto (SFVC, Sensorless flux vector control) Es aplicable a funcionamiento a baja velocidad durante la puesta en marcha sin carga del motor asíncrono, el juicio de fallo en la inspección, y el funcionamiento de motor síncrono en condiciones especiales. 1: Vectorial de lazo cerrado (CLVC, Closed-loop vector control) Es aplicable al funcionamiento normal en control de distancia. 2: Control de voltaje/ de frecuencia (V/F) Es aplicable a la detección de equipo donde se fija la relación entre el voltaje y la frecuencia, el control es simple, y la característica de par de salida de baja frecuencia es pobre. Código de función Nombre del parámetro Selección de F0-01 o Unidad Propieda d 0: Control de panel de operación fuente de comando Defect Rango de ajuste 1 - ★ 1: Control de distancia Se utiliza para establecer la fuente de comando de funcionamiento y de referencia de velocidad de funcionamiento. 0: Control de panel de operación El controlador se opera presionando y en el panel de operación y la velocidad de funcionamiento es fijada por F0-02 (velocidad de funcionamiento bajo control de panel de operación). Este método sólo es aplicable a la prueba o el auto ajuste de motor sin carg 1: Control de distancia Este método se utiliza en el controlador del ascensor integrado de serie de NICE. Durante la inspección, el ascensor funciona a la velocidad ajustada en F3-11. Durante funcionamiento normal, el controlador calcula automáticamente la velocidad y la curva de funcionamiento para el ascensor basado en la distancia entre el piso actual y el piso de destino dentro de la velocidad nominal del ascensor, realizando la parada directa. Código de función Nombre del parámetro Rango de ajuste Defect o Unidad Propieda d Velocidad de F0-02 funcionamiento bajo control de panel de 0.050 a F0-04 0.050 m/s ☆ operación Se utiliza para establecer la velocidad de funcionamiento en el modo de control del panel de operaciones. Tenga en cuenta que esta función sólo se activa cuando F0-01 se establece en 0 (control de panel de operación). Puede cambiar la velocidad de funcionamiento del ascensor mediante la modificación de este parámetro durante el funcionamiento Código de función F0-03 Nombre del parámetro Velocidad máxima de funcionamiento Rango de ajuste 0.250 a F0-04 Defect o 1.600 Unidad m/s Propieda d ★ Se utiliza para ajustar la velocidad máxima de funcionamiento real del ascensor. El valor debe ser menor que la velocidad nominal del ascensor. Código de función F0-04 Nombre del parámetro Velocidad nominal del ascensor Rango de ajuste 0.250–4.000 Defect o 1.600 Unidad m/s Propieda d ★ Se utiliza para establecer la velocidad norminal del ascensor. El valor de este parámetro depende de mecanismo de ascensor y el motor de tracción. F0-03 es la velocidad real de funcionamiento dentro del rango de velocidad del ascensor fijado en F0-04. Por ejemplo, para un cierto ascensor, si F0-04 es 1,750 m / s y la velocidad máxima de funcionamiento real requerida es 1,600 m / s, establezca F0-03 a 1,600 m / s. Código de función F0-05 Nombre del parámetro Carga nominal del ascensor Rango de ajuste 300–9999 Defect o 1000 Unidad kg Propieda d ★ Se utiliza para ajustar la carga nominal del ascensor. Este parámetro se utiliza para la función de anti-molestia. Código de función F0-06 Nombre del parámetro Frecuencia máxima Rango de ajuste 20.00–99.00 Defect o 50.00 Unidad Hz Propieda d ★ Se utiliza para ajustar la frecuencia de salida máxima del sistema. Este valor debe ser mayor que la frecuencia nominal del motor. Código de función F0-07 Nombre del parámetro Frecuencia de la portadora Rango de ajuste 0.5–16.0 Defect o 6.0 Unidad kHz Propieda d ★ Se utiliza para establecer la frecuencia de portadora del controlador. La frecuencia de portadora está estrechamente relacionada con el ruido del motor durante el funcionamiento. Cuando se establece generalmente por encima de 6 kHz, se logra un funcionamiento mudo. Se recomienda ajustar la frecuencia de la portadora a la más baja dentro del ruido permisible, lo que reduce la pérdida de controlador y la interferencia de frecuencia de radio. Si la frecuencia de la portadora es baja, la corriente de salida tendrá armónicos altos, y la pérdida del potencia y aumento de la temperatura aumentarán. Si la frecuencia de la portadora es alta, la pérdida de potencia y el aumento de temperatura del motor disminuyen. Sin embargo, el sistema tiene un aumento de pérdida de potencia, del aumento de la temperatura y de la interferencia. Ajuste de la frecuencia de portadora ejercerá influencia sobre los aspectos enumerados en la siguiente tabla. Tabla 7-1 Influencias de ajuste de frecuencia de portadora Frecuencia de portadora Bajo Alto Ruido del motor Grande Pequeño Malo Bueno Alto Bajo Bajo Alto Corriente de fuga Pequeño Grande External radiation interference Pequeño Grande Forma de onda de corriente de salida Aumento de temperatura del motor Aumento de temperatura del controlador En ciertas condiciones ambientales (la temperatura del disipador de calor es demasiado alta), el sistema reducirá la frecuencia de portadora para proporcionar protección contra el sobrecalentamiento para el controlador, evitando que el controlador se dañe debido a sobrecalentamiento. Si la temperatura no se puede reducir en este caso, el controlador informa un fallo de sobrecalentamiento. Grupo F1: Parámetros del motor Código de función F1-00 Nombre del Rango de ajuste parámetro Defect o Unidad Propieda d 0: Encoder de SIN/COS Tipo de 1: Encoder de UVW encoder 0 - ★ 2: Encoder incremental de ABZ Se utiliza para establecer el tipo de encoder que coincida con el motor. Cuando F1-25 se establece en 1 (motor síncrono), ajuste este parámetro correctamente antes de auto-ajuste; de lo contrario, el motor no puede funcionar correctamente. Cuando F1-25 se establece en 0 (Motor asíncrono), este parámetro se cambia automáticamente a 2. No es necesario modificarlo manualmente. Código Nombre del Rango de parámetro ajuste F1-01 Potencia nominal del motor 0.7–75.0 F1-02 Tensión motor F1-03 Corriente nominal del motor de función nominal del 0–600 0.00–655.00 Defecto Depende del modelo Depende del modelo Depende del modelo Unidad Propieda d kW ★ V ★ A ★ F1-04 Frecuencia nominal del motor F1-05 Velocidad de nominal del motor giro 0.00–99.00 0–3000 Depende del modelo Depende del modelo Hz ★ RPM ★ Establezca estos parámetros de acuerdo con la placa de identificación del motor. Asegúrese de que estos parámetros del motor se han establecido correctamente. Ajuste incorrecto afecta al auto-ajuste del motor y el efecto de control vectorial. Código de función Nombre del parámetro Rango de ajuste Defect o Unidad Ángulo inicial del F1-06 encoder(motor 0.0–359.9 0 0.0–359.9 0 0–15 0 Degrad o (°) síncrono) F1-07 F1-08 Ángulo del encoder al apagar(motor síncrono) Modo de cableado del motor síncrono Degado (°) - Propieda d ★ ★ ★ Estos parámetros se obtienen por medio de auto-ajuste del motor. F1-06 especifica el ángulo del encoder en el punto cero. Después de varias veces de auto-ajuste, compare los valores obtenidos, y la desviación de valor de F1-06 debe ser dentro de ± 5 °. F1-07 especifica el ángulo del polo magnético cuando el motor se apaga. El valor se registra al apagar y se utiliza para la comparación en el próximo encendido. F1-08 especifica el modo de cableado del motor, es decir, si la secuencia de fase de salida del tablero de accionamiento concuerda con la secuencia de fases de UVW del motor. Si el valor obtenido por medio del auto-ajuste sin carga es un número par, la secuencia de fases es correcta. Si el valor es un número impar, la secuencia es incorrecta; en este caso, intercambie dos cualquiera de las fases de UWW del motor. Auto-ajuste con carga del motor síncrono se puede realizar solamente cuando la secuencia de fases de UVW del motor es consistente con la secuencia de fase de salida del controlador. Código de función Nombre del parámetro Rango de ajuste Defect o Unidad Propieda d Coeficiente de filtro de F1-09 corriente (motor síncrono) 0 ~ 3 0 - ★ Se utiliza para ajustar el tiempo de filtro de corriente, que suprime el temblor vertical periódico. Aumente el valor en orden ascendente de 0,5 para lograr el efecto óptimo. Código de función F1-10 Nombre del Rango de ajuste parámetro Selección de 0–65535 verificación del encoder Defect o 0 Unidad - Propieda d ★ Se utiliza para establecer la señal de verificación del encoder. Este parámetro es fijado por el fabricante, y usted no necesita modificarlo generalmente. Código de función F1-11 Nombre del Rango de ajuste parámetro Modo de auto-ajuste 0: No hay operación 1: Auto-ajuste con carga 2: Auto-ajuste sin carga Defect o 0 Unidad - Propieda d ★ 3: Auto-ajuste de ducto Se utiliza para seleccionar el modo de auto-ajuste. "Auto-ajuste con carga" es auto-ajuste estático para motor asíncrono y auto-ajuste rotativo para motor síncrono. Cuando F1-11 se establece en 2 (auto-ajuste sin carga), el motor debe estar completamente desconectado de la carga; de lo contrario, el efecto de auto-ajuste se verá afectado. Cuando aparece TUNE en el panel de operación, es necesario liberar manualmente el freno antes de realizar el autoajuste. Para más detalles sobre el proceso de auto-ajuste, consulte la descripción en la sección 5.1.3. Código de función F1-12 Nombre del parámetro Impulsos del encoder por vuelta Rango de ajuste 0–10000 Defect o 2048 Unidad PPR Propieda d ★ Se utiliza para ajustar los impulsos por vuelta del encoder (de acuerdo con la placa de identificación del encoder). Este parámetro es fundamental para CLVC (Control vectorial de lazo cerrado). Establezca el valor nominal del encoder en este parámetro. De lo contrario, es posible que el ascensor no se pueda funcionar correctamente. Cuando los impulsos de retroalimentación recibidos por el sistema son datos tras la división de frecuencia por otro equipo, establezca el valor de división de frecuencia en lugar del valor nominal del encoder en este parámetro. Por ejemplo, si los impulsos por vuelta del encoder es de 8192 y se envía al sistema después de 1/4 de división de frecuencia, ajuste este parámetro en 2048 (8192/4 = 2.048). F0-04 (Velocidad nominal del ascensor), F1-05 (velocidad de giro nominal del motor), y F1-12 (impulsos del encoder por vuelta) determinar si el ascensor puede funcionar correctamente. Si cualquiera de estos parámetros cambia, auto-ajuste de ducto debe realizarse de nuevo. Código de Nombre del parámetro función Defect Rango de ajuste o Unidad Propieda d Tiempo de detección de F1-13 rotura de cable de 0–10.0 1.0 s ★ encoder Este parámetro se utiliza para establecer el tiempo de que un fallo de rotura de cable dura antes de ser detectado. Después de que el ascensor se pone en marcha a velocidad distinta de cero, si no hay entrada de señal del encoder dentro del tiempo establecido en este parámetro, el sistema informa un fallo del encoder y deja de funcionar. Cuando el valor es inferior a 0,5 s, esta función está desactivada. Código de Nombre del parámetro función F1-14 F1-15 F1-16 F1-17 Resistencia del estator (Motor asíncrono) Resistencia del rotor (Motor asíncrono) Inductancia de fuga (Motor asíncrono) Inductancia mutua (Motor asíncrono) Rango de ajuste 0.000–30.000 0.000–30.000 0.00–300.00 0.1–3000.0 Corriente de F1-18 magnetización (Motor asíncrono) 0.01–300.00 Defecto Depende del modelo Depende del modelo Depende del modelo Depende del modelo Depende del modelo Unidad Propieda d Ω ★ Ω ★ mH ★ mH ★ A ★ Estos parámetros se obtienen por medio de auto-ajuste del motor. Después de que el auto-ajuste de motor se completa con éxito, los valores de estos parámetros se actualizan automáticamente. Si el auto-ajuste de motor no se puede realizar en el lugar, introduzca manualmente los valores tomando referencia a los datos del motor con los mismos parámetros de la placa de identificación. Cada vez que F1-01 (Potencia nominal del motor) del motor asíncrono se modifica, estos parámetros se reanudan automáticamente a los valores predeterminados para el motor estándar. Código de Nombre del parámetro función F1-19 F1-20 F1-21 Rango de ajuste Inductancia de eje de Q(par) Inductancia de eje de D(excitación) BEMF Defect o Unidad Propieda d 0.00–650.00 3.00 mH ★ 0.00–650.00 3.00 mH ★ 0–65535 0 - ★ Estos parámetros se obtienen por medio de auto-ajuste del motor. Código de función F1-25 Nombre del Rango de ajuste parámetro Tipo de motor 0: Motor asíncrono 1: Motor síncrono Defect o Unidad - 1 Propieda d ★ Se utiliza para establecer el tipo de motor. Este parámetro debe ser ajustado correctamente antes de de auto-ajuste del motor; de lo contrario, el autoajuste del motor no se puede realizar. Grupo F2: Parámetros de Control Vectorial Código de Nombre del parámetro función Rango de Defect ajuste o Unidad Propieda d F2-00 Bucle de velocidad KP1 0–100 40 - ★ F2-01 Bucle de velocidad Ti1 0.01–10.00 0.60 s ★ F2-02 Frecuencia de conmutación 1 0.00 a F2-05 2.00 Hz ★ F2-00 y F2-01 son parámetros de regulación de PI cuando la frecuencia de funcionamiento es menor que el valor de F2-02 (frecuencia de conmutación 1). Código de Nombre del parámetro función F2-03 Bucle de velocidad KP2 F2-04 Bucle de velocidad Ti2 F2-05 Frecuencia de conmutación 2 Rango de Defect ajuste o 0–100 35 - ★ 0.01–10.00 0.80 s ★ F2-02 a F0-06 5.00 Hz ★ Unidad Propieda d F2-03 y F2-04 son parámetros de regulación de PI cuando la frecuencia de funcionamiento es mayor que el valor de F2-05 (frecuencia de conmutación 2). Si la frecuencia de funcionamiento es entre F2-02 y F2-05, los parámetros de PI de bucle de velocidad se obtienen del valor medio ponderado de los dos grupos de parámetros de PI (F2-00, F2-01 and F2-03, F2-04) , como se muestra en la Figura 7-1. Figura 7-1 Relación entre las frecuencias de funcionamiento y los parámetros de PI Las características de respuesta dinámica de velocidad en el control vectorial se pueden ajustar mediante el establecimiento de la ganancia proporcional y tiempo integral del regulador de velocidad. Para lograr una respuesta más rápida del sistema, aumente la ganancia proporcional y reduzca el tiempo integral. Tenga en cuenta que esto puede conducir la oscilación del sistema. El método de ajuste recomendado es el siguiente: Si la configuración predeterminada no se puede cumplir con los requisitos, haga un ajuste adecuado. Aumente la ganancia proporcional primero para asegurar que el sistema no oscile, y luego reduzca el tiempo integral para asegurar que el sistema tenga una respuesta rápida y pequeño rebasamiento. Si tanto F2-02 (frecuencia de conmutación 1) y F2-05 (frecuencia de conmutación 2) son 0, sólo F2-03 y F2-04 son válidos. Código de Nombre del parámetro Rango de ajuste función Defect o Unidad Propieda d F2-06 Bucle de corriente KP1 (par) 10–500 60 - ★ F2-07 Bucle de corriente KI1 (par) 10–500 30 - ★ Estos dos parámetros son parámetros de regulación para el bucle de corriente del eje de par. Estos parámetros se utilizan como el regulador de corriente de eje de par en el control vectorial. Los mejores valores de los parámetros de adaptación de las características del motor se obtienen por medio del auto-ajuste del motor. Generalmente usted no necesita modificarlos. Código de función F2-08 Nombre del parámetro Límite máximo de par Rango de ajuste 0.0–200.0 Defect o 150.0 Unidad % Propieda d ★ Se utiliza para establecer el límite máximo de par del motor. El valor del 100% corresponde al par nominal de salida del motor adaptable. Código Nombre del de parámetro función Rango de ajuste Defect o Unidad Propieda d Dirección de F2-10 funcionamiento de 0–1 0 - ★ ascensor Se utiliza para establecer la dirección de funcionamiento del ascensor. Los valores son los siguientes: 0: Dirección misma 1: Dirección inversa Mediante este parámetro puede inversar la dirección del funcionamiento(dirección de funcinamiento del motor cuando el modo de cableado del motor no cambia). Después del éxito del auto-ajuste del motor, a la primera vez de funcionamiento de inspección, compruebe si la dirección real de funcinamiento del motor concuerda con la dirección de comando de inspección, si no está conforme, establezca el valor de F2-10 para cambiar la dirección de funcionamiento del motor para que sea conforme con la del comondo de inspección. Preste atención a la configuración de este parámetro cuando se restaura la configuración predeterminada. Código de Nombre del parámetro Rango de ajuste función F2-11 F2-12 F2-13 Coeficiente de corriente de servo cero KP de bucle de velocidad de servo cero Ti de bucle de velocidad de servo cero Defect o Unidad Propieda d 0.20–50.0 15 % ★ 0.00–2.00 0.5 - ★ 0.00–2.00 0.6 s ★ Estos parámetros se utilizan para ajustar la compensación automática de pre-par en el caso de célula sin carga. La función de arranque de célula sin carga se activa cuando F8-01 se establece en 2. Disminuya los valores de estos parámetros en el caso de sacudida de cabina en el arranque, y aumente los valores en el caso de retrotracción en el arranque. Para obtener más información, consulte la descripción de la sección 5.1.5. Código de Nombre del parámetro Rango de ajuste función F2-16 Tiempo de aceleración de par 1–500 Defect o 1 Unidad ms Propieda d ★ F2-17 Tiempo de desaceleración de par 1–500 350 ★ ms Estos dos parámetros se utilizan para ajustar el tiempo de aceleración y deceleración de la corriente de par Debido a las características diferentes, el motor puede tener un sonido anormal cuando la corriente se retira en la parada. En este caso, se puede aumentar el tiempo de desaceleración de par correctamente para eliminar el sonido anormal. Código Nombre del de parámetro función F2-18 Tiempo de aceleración de arranque Rango de ajuste 0.000–1.500 Defect o 0.000 Unidad Propieda d s ★ Se utiliza para establecer el tiempo de aceleración de velocidad de arranque. Se utiliza con F3-00. Para más detalles, vea la Figura 7-2. Grupo F3: Parámetros de control de funcionamiento Código de función F3-00 Nombre del parámetro Velocidad de arranque Tiempo de mantenimiento F3-01 de arranque Rango de Propieda Defecto Unidad 0.000–0.030 0.000 m/s ★ 0.000–0.500 0.000 s ★ ajuste d Estos dos parámetros se utilizan para ajustar la velocidad de arranque y el tiempo de mantenimiento de la velocidad de arranque . Para más detalles, vea la Figura 7-2. Los parámetros pueden reducir la sensación de terraza en el arranque debido a la fricción estática entre el carril de guía y las zapatas de guía. Código Nombre del de parámetro función Rango de ajuste Defect o Unidad Propieda d F3-02 Tasa de aceleración 0.200–2.000 0.600 m/s2 ★ F3-03 Tiempo de aceleración en el punto de inflexión 1 0.300–4.000 2.500 s ★ F3-04 Tiempo de aceleración en el punto de inflexión 2 0.300–4.000 2.500 s ★ Estos parámetros se utilizan para ajustar la curva de funcionamiento durante la aceleración del ascensor. Código de función Nombre del parámetro Rango de ajuste Defecto Unidad Propieda d F3-05 Tasa de deceleración 0.200–2.000 0.600 m/s2 ★ F3-06 Tiempo de deceleración en el punto de inflexión 1 0.300–4.000 2.500 s ★ F3-07 Tiempo de deceleración en el punto de inflexión 2 0.300–4.000 2.500 s ★ Estos parámetros se utilizan para ajustar la curva de funcionamiento durante la deceleración del ascensor. F3-02 (F3-05) es la tasa de aceleración (tasa de deceleración) en el proceso de aceleración (proceso de desaceleración) en línea recta de la curva S. F3-03 (F3-07) es el tiempo de que la tasa de aumenta desde 0 hasta el valor establecido en F3-02 (F3-05) en el segmento de inflexión de la curva S. Cuanto mayor sea el valor, más suave será la inflexión. F3-04 (F3-06) es el tiempo de que la tasa disminuya del valor establecido en F3-02 (F3-05) a 0 en el segmento de inflexión de la curva S. Cuanto mayor sea el valor, más suave será la inflexión. Figura 7-2 Ajuste de la curva de funcionamiento Código de función F3-08 Nombre del parámetro Tasa de deceleración especial Rango de ajuste 0.500–2.000 Defecto Unidad 0.900 m/s2 Propieda d ★ Se utiliza para establecer la tasa de desaceleración en desaceleración forzada del ascensor, inspección, y auto-ajuste del ducto. Este parámetro no se utiliza durante el funcionamiento normal. Se utiliza sólo cuando la posición del ascensor es anormal o la señal de desaceleración es anormal para evitar el sobre recorido del terminal superior y inferior. Código de función F3-09 Nombre del parámetro Distancia de pre-deceleración Rango de ajuste 0–90.0 Defecto Unidad 0.0 mm Propieda d ★ Se utiliza para establecer la distancia de pre-deceleración del ascensor en control de distancia, como se muestra en la Figura 7-2. Esta función es para eliminar el efecto de pérdida de la señal del encoder o retardo de la señal de nivelación. Código de función F3-10 Nombre del parámetro Velocidad de re-nivelación de Rango de ajuste Defecto Unidad 0.040 m/s 0.000–0.080 Propieda d ★ Se usa para ajustar la velocidad del ascensor durante la re-nivelación. Este parámetro sólo es válido cuando el módulo de preapertura (MCTC-SCB-A) se añade a realizar la función de re-nivelación (establecido en FE-32). Código de función F3-11 Nombre del parámetro Velocidad de inspección Rango de ajuste 0.100–0.630 Defecto Unidad 0.250 m/s Propieda d ★ Se utiliza para ajustar la velocidad del ascensor durante la inspección y el auto-ajuste de ducto. Código de función Nombre del parámetro F3-12 Posición arriba ralentización 1 de F3-13 Posición abajo ralentización 1 de F3-14 Posición arriba ralentización 2 de F3-15 Posición abajo ralentización 2 de F3-16 Posición arriba ralentización 3 de F3-17 Posición abajo ralentización 3 de Rango de Propieda Defecto Unidad 0.000–300.00 0.00 m ★ 0.000–300.00 0.00 m ★ 0.000–300.00 0.00 m ★ 0.000–300.00 0.00 m ★ 0.000–300.00 0.00 m ★ 0.000–300.00 0.00 m ★ ajuste d Estos parámetros especifican las posiciones de todos interruptores de ralentización en relación a la posición de nivelación inferior, y las posiciones se registran automáticamente durante el auto-ajuste del ducto. Para las posiciones de instalación de los interruptores de ralentización, consulte la descripción de la sección 3.8.2. El controlador del ascensor integrado NICE3000new admite un máximo de tres pares de interruptores de ralentización. De dos extremos del ducto a la media, ralentización 1, ralentización 2, y ralentización 3 se instalan en el orden; es decir, ralentización 1 se instala cerca del piso terminal. Puede haber sólo un par de interruptores para el ascensor de baja velocidad, y dos o tres pares de interruptores de ralentización para el ascensor de alta velocidad. El sistema detecta automáticamente la velocidad cuando el ascensor llega a un interruptor de ralentización. Si la velocidad o posición detectada es anormal, el sistema permite que el ascensor decelera a la tasa de deceleración especial establecida en F3-08 para evitar el sobre recorido del terminal superior y inferior. Código de función Rango de Nombre del parámetro ajuste Defecto Unidad Propieda d F3-18 Tiempo de control de velocidad cero en el arranque 0.000–1.000 0.200 s ★ F3-19 Demora de apertura del freno 0.000–1.000 0.600 s ★ F3-20 Tiempo de demora al final de funcionmiento 0.200–1.500 0.200 s ★ Estos parámetros se utilizan para ajustar el tiempo en relación con la salida de corriente de mantenimento de velocidad de cero y demora de acción del freno. F3-18 (tiempo de control de velocidad cero en el arranque) especifica el tiempo de salida del contactor RUN a la salida del contactor de freno, durante el cual el controlador realiza la excitación en el motor y emite corriente de velocidad cero con par grande de arranque. F3-19 (demora de apertura del freno) especifica el tiempo desde el momento en que el sistema envía el comando de liberación del freno al momento en que el freno se libera por completo, durante el cual el sistema mantiene la salida de corriente de par de velocidad cero. F3-20 (Tiempo de demora al final de funcionmiento) especifica el tiempo de que desde la salida de comando de liberación del freno, el sistema mantiene la salida de velocidad cero durante el tiempo establecido en F8-11 para evitar el deslizamiento del ascensor. F8-11(Tiempo de mantenimiento de velocidad de cero en la liberación de freno)es desde que se emite el mando de liberar el freno, se mantiene la salida de corriente a velocidad cero para evitar el deslizamiento del coche. Figure 7-3 Secuencia de tiempo de funcionamiento Código de Nombre del Rango de ajuste Defecto Unidad Propieda función parámetro d Velocidad de F3-21 renivelación de baja- 0.080 a F3-11 0.100 m/s ★ velocidad Se usa para ajustar la velocidad del ascensor de volver a la posición de nivelación en la parada normal de no-nivelación. Código de Nombre del función parámetro Rango de ajuste Defecto Unidad Propieda d Tasa de aceleración F3-22 de funcionamiento de 0.100–1.300 0.100 m/s² ★ rescate Se utiliza para ajustar la tasa de aceleración de funionamiento de rescate. Código de Nombre del función parámetro Selección de F3-24 funciones del programa Rango de ajuste Defecto Unidad Propiedad — ★ 0:Reservado 1 : Habilitado para experimentos de 0 deslizamiento Este parámetro es para experimentos de deslizamiento del motor en la aceptación del ascensor. Si en condición normal de funcionamiento, el experimento de deslizamiento en el lugar no tiene éxito, establezca esta parámetro en 1 para entrar en la función de experimento de deslizamiento. Después del experimento, estableza F3-24=0 para salir de esta función. Grupo F4: Parámetros de piso Código de Nombre del función parámetro F4-00 Ajuste de nivelación Rango de ajuste Defecto Unidad 0–60 30 mm Propieda d ★ Se usa para ajustar la precisión de nivelación en la parada de ascensor. Si se produce un exceso de nivelación en parada del ascensor en todos los pisos, disminuya el valor de este parámetro correctamente. Si se produce una disminución de nivelación en parada del ascensor en todos los pisos, aumente el valor de este parámetro correctamente. Este parámetro toma efecto a la nivelación de todos los pisos. Por lo tanto, si la nivelación de un solo piso es inexacta, ajuste la posición de la placa de nivelación. El NICE3000new tiene el algoritmo avanzado de control de la distancia y adopta muchos métodos para garantizar la fiabilidad de parada directa. Generalmente no es necesario modificar este parámetro. Código de Nombre del Rango de ajuste Defecto Unidad Propieda función F4-01 parámetro Piso actual d F6-01 a F6-00 1 - ★ Este parámetro indica el piso actual de la cabina del ascensor El sistema cambia automáticamente el valor de este parámetro durante el funcionamiento, y lo corrige en la posición de nivelación (límite de apertura de la puerta) después de que los interruptores de desaceleración de arriba y de abajo actúan. En la nivelación de pisos no inferior y del piso superior, también puede modificar manualmente este parámetro, pero el valor debe ser coherente con la piso actual real. Código de función F4-02 F4-03 Nombre del parámetro Byte alto de la posición de piso actual Byte bajo de la posición de piso actual Rango de ajuste Defecto 0–65535 1 0–65535 34464 Unidad Impulso s Impulso s Propieda d ● ● Estos dos parámetros indican los impulsos absolutos de la posición actual de la cabina del ascensor con relación a la posición de nivelación del piso inferior. Los datos de posición de los NICE3000new en el ducto se registra por impulsos. Cada posición se expresa mediante un número binario de 32 bits, donde los 16 bits altos indican el byte alto de la posición de piso, y los 16 bits más bajos indican el byte bajo de la posición de piso. Código de Nombre del parámetro función F4-04 F4-05 Longitud 1 de la placa de nivelación Longitud 2 de la placa de nivelación Rango de Propieda Defecto Unidad 0–65535 0 mm ★ 0–65535 0 mm ★ ajuste d Estos dos parámetros indican, respectivamente, los impulsos correspondientes a la longitud de la placa de nivelación y la longitud entre dos sensores de nivelación. Se registran automáticamente durante auto-ajuste del ducto. Código de Nombre del parámetro función F4-06 F4-07 Byte alto de altura del piso 1 Byte bajo de altura del piso 1 Rango de ajuste Defecto 0–65535 0 0–65535 0 Unidad Impulso s Impulso s Propieda d ★ ★ …(Altura de piso 2 a altura de piso 38) F4-82 F4-83 Byte alto de altura del piso 39 Byte bajo de altura del piso 39 0–65535 0 0–65535 0 Impulso s Impulso s ★ ★ Estos parámetros indican los impulsos correspondientes a la altura del piso i (entre las placas de nivelación de piso i y piso i + 1). Cada altura del piso se expresa mediante un número binario de 32 bits, donde los 16 bits altos indican el byte alto de la altura del piso, y los 16 bits más bajos indican el byte bajo de la altura del piso. En condiciones normales, el impulso correspondiente de la altura del piso i de cada piso es casi la misma. Grupo F5: Parámetros de función de terminales Código de función Nombre del parámetro Rango de ajuste Defecto Unidad 3 s Propieda d Tiempo de conmutación F5-00 entre operador y 3–200 ★ automático Si hay una llamada de piso en el piso no-actual en el estado de operador, el sistema cambia automáticamente al estado automático (normal) después del tiempo ajustado en este parámetro. Una vez finalizado este funcionamiento, el sistema restaura automáticamente al estado de operador (BIT2 de F6-43 debe estar ajustado a 1). Cuando el valor de este parámetro es menor que 5, esta función está desactivada, y el sistema está en el estado de operador normal. Código de Nombre del función parámetro F5-01 Rango de ajuste Propieda Defecto Unidad Selección de función de X1 33 - ★ F5-02 Selección de función de X2 35 - ★ F5-03 Selección de función de X3 34 - ★ F5-23 Selección de función de X23 00 - ★ F5-24 Selección de función de X24 00 - ★ 0–127 … d ··· Estos parámetros se utilizan para ajustar las funciones de los terminales de entrada de X1 a X24. Funciones 04/36 ( NA / NC de entrada de retroalimentación de circuito de seguridad ), 05/37 (Door lock circuit feedback NO/NC input), 06/38 (NA / NC de entrada de retroalimentación de contactor principal ), 07/39 (NA / NC de entrada de retroalimentación de freno), 26/58 (NA / NC de entrada de retroalimentación de freno 2 ) se pueden asignar varias veces para los terminales de entrada. Terminales X1 a X24 son entradas digitales, y se asignan con funciones correspondientes basadas en las señales de entrada. Todos estos terminales comparten el terminal COM. Después de que la tensión de 24 V se emite, el indicador de terminal de entrada correspondiente se convierte en ON. Las funciones se describen como sigue: 00: Inválido Incluso si no hay señal de entrada al terminal, el sistema no tiene respuesta. Puede asignar esta función a los terminales que no se utilizan para evitar errores de funcionamiento. 01: Señal de nivelación de arriba 02: Señal de nivelación abajo 03: Señal de zona de puerta El sistema NICE3000new determina la posición de nivelación de ascensor basado en la señal de sensor de nivelación. El sistema es compatible con tres tipos de configuración de nivelación: sensor de zona única de puerta, sensor de nivelación de arriba / abajo, y el sensor de zona de puerta más el sensor de nivelación de arriba / abajo. Si se utilizan tres sensores de nivelación, el sistema recibe la señal de nivelación arriba, la señal de zona de puerta, y señal de nivelación abajo en secuencia en la dirección hacia arriba, y recibe señal de nivelación abajo, la señal de zona de puerta, y señal de nivelación arriba en la secuencia en la dirección hacia abajo . Si se utilizan dos sensores de nivelación(sensor de nivelación arriba y abajo), el sistema recibe la señal de nivelación arriba y señal de nivelación abajo en secuencia en la dirección hacia arriba, y recibe señal de nivelación abajo y señal de nivelación arriba en secuencia en la dirección hacia abajo . Si la señal de nivelación es anormal (atascado o no está disponible), el sistema informa un fallo Err22. 04: Señal de realimentación del circuito de seguridad 05: Señal de retroalimentación de circuito de bloqueo de puerta 29: Señal de realimentación del circuito de seguridad 2 31: Señal de retroalimentación de circuito de bloqueo de puerta 2 El circuito de seguridad es importante para funcionamiento seguro y fiable del ascensor, y el circuito de bloqueo de la puerta garantiza que la puerta del piso y la puerta de coche están cerradas antes de que el de ascensor empieza a funcionar. Señales de retroalimentación válidas del circuito de seguridad y circuito de bloqueo de la puerta son necesarias para el funcionamiento del ascensor. Se recomienda que estas señales están ajustadas en entrada NA. Si se ajustan a la entrada NC, el sistema considera la entrada activa a pesar de que no hay entrada. En este caso, el estado real del circuito de seguridad no puede ser detectado, lo que puede causar riesgos potenciales de seguridad. 06: Señal de retroalimentación de contactor de RUN 07: Entrada de señal de retroalimentación de freno 26:Entrada de señal de final de carrera de freno1 78:Entrada de señal de final de carrera de freno2 El sistema envía comandos a los contactores de RUN y de freno y automáticamente detecta la retroalimentación de los contactores de RUN y de freno. Si los comandos y la retroalimentación son inconsistentes, el sistema informa de un fallo. 08: Señal de inspección 09: Señal de inspección arriba 10: Señal de inspección abajo Cuando el interruptor Automático / inspección se ajusta en la posición de inspección, el ascensor entra en el estado de inspección; en este caso, el sistema cancela todos los funcionamientos automáticos incluyendo las operaciones de puertas automáticas. Cuando la señal de inspección arriba o señal de inspección abajo es válida, el ascensor funciona a la velocidad de inspección. 11: Señal de emergencia de incendio Cuando el interruptor de emergencia de fuego está activado, el ascensor entra en estado de emergencia de fuego, y de inmediato cancela las llmadas de piso y llamadas de cabina registradas y marcha directamente al piso de base de emergencia de incendio. Una vez llegado al piso de base, se abre la puerta automáticamente. 12: Señal de límite arriba 13: Señal de límite abajo La señal de límite arriba y la señal de límite abajo se utilizan como los interruptores de parada en el piso terminal para evitar el exceso de viaje del terminal superior y inferior cuando el ascensor funciona más de la posición de nivelación del piso terminal pero no se detiene. 14: Señal de sobrecarga Cuando la carga del ascensor supera el 110% de la carga nominal durante el uso normal, el ascensor entra en el estado de sobrecarga. A continuación, el zumbador emite un pitido de sobrecarga, el indicador de sobrecarga en el coche se convierte en ON, y la puerta del ascensor se mantiene abierta. La señal de sobrecarga se convierte inválida cuando se aplica la cerradura de la puerta. Si se requiere el funcionamiento con 110% de la carga nominal durante la inspección, se puede establecer F7-06 en 1 para permitir el funcinonamiento de sobrecarga (tenga en cuenta que esta función tiene riesgos potenciales de seguridad y utilícelo con precaución). Se recomienda que la señal de sobrecarga puede ajustar a la entrada NC. Si se establece en NA, el sistema no puede detectar el estado de sobrecarga cuando el interruptor de sobrecarga se daña o se corta la conexión, y el funcionamiento del ascensor en este caso puede causar riesgos potenciales de seguridad. También se recomienda que la señal de límite arriba, señal de límite arriba abajo, y la señal de desaceleración se ajustan en la entrada NC. 15: Señal de plena carga Cuando la carga del ascensor es de 80% a 110% de la carga nominal, el HOP muestra el estado de plena carga, y el ascensor no responde a llamadas de piso. Cuando se utiliza Terminal X en el MCB para la entrada de las señales de sobrecarga y de plena carga, asegúrese de que F5-36 se ha establecido en 0. 16: Señal de desaceleración arriba 1 17: Señal de desaceleración abajo 1 18: Señal de desaceleración arriba 2 19: Señal de desaceleración abajo 2 20: Señal de desaceleración arriba 3 21: Señal de desaceleración abajo 3 Las señales de desaceleración se utilizan para habilitar el ascensor a detener a la velocidad de desaceleración cuando la posición de la cabina es anormal, que es un método importante para garantizar la seguridad del ascensor. El sistema registra automáticamente las posiciones de los interruptores en grupo F3 durante el auto-ajuste del ducto. 22: Retroalimentación de cortocircuito de contactor de circuito de bloqueo de puerta Es la señal de realimentación cuando el circuito de bloqueo de la puerta está en cortocircuito a permitir la función de pre-apertura de puerta a la llegada o renivelación a la apertura de puerta para el ascensor configurado con el módulo de preapertura. Esto es para garantizar la seguridad durante el funcionamiento del ascensor. 23: Señal del interruptor de bombero Es la señal del interruptor de bombero y se utiliza para permitir el funcionamiento de bombero. Después de que el ascensor vuelve al piso de emergencia de incendio, el ascensor entra en el estado de funcinamiento de bombero si la señal de bombero está activa. 24: Señal de cortina de luz de máquina de la puerta 1; 25: Señal de cortina de luz de máquina de la puerta 2 Se utilizan para detectar las señales de cortina de luz de máquina de puerta 1 y máquina de puerta 2 (si existe). 27: Señal válida Es la señal de funcionamiento de emergencia en caso de corte de energía. Si está activa, indica que el ascensor está funcionando para evacuación de emergencia en caso de corte de energía. Para más detalles, véase la sección 5.2.1. 28: Señal de bloqueo del ascensor Si esta señal está activa, el ascensor entra en el estado de bloqueo, vuelve al piso de bloqueo del asecnsor y no responde a ninguna llamada hasta que la señal se vuelve inactiva. Tiene la misma función que la señal de bloqueo del ascensor de llamada de piso. 30: Señal de realimentación de cortocircuito de estator de PMSM El contactor de cortocircuito de estator de PMSM protege el ascensor de caer a alta velocidad en el caso de fallo de los frenos. Esta señal se utiliza para supervisar si el contactor de cortocircuito de estator de PMSM es normal. 65: Señal de borde de seguridad de máquina de puerta 1; 66: Señal de borde de seguridad de máquina de puerta 2; Ellos se utilizan para detectar el estado de señal de borde de seguridad de máquina de puerta 1 y máquina de puerta 2 (si existe). 67: Señal de sobrecalentamiento del motor Si esta señal se mantiene activa durante más de 2 s, el controlador detiene la salida e informes un fallo de Err39 para indicar el sobrecalentamiento del motor. Después de que esta señal se vuelva inactiva, Err39 se restablece automáticamente y el sistema volverá a la operación normal. 68: Señal de terremoto Si esta señal permanece activa durante más de 2s, el ascensor entra en el estado de paro de terremoto, se detiene en el piso del aterrizaje más cercano y se abre la puerta. El ascensor comienza a funcionar de nuevo después de que la señal de terremoto se vuelva inactiva. 69: Señal de puerta trasera prohibida Si se aplican las máquinas de doble puerta, esta señal se utiliza para prohibir el uso de máquina de la puerta 2. 70: Señal de carga ligera Se utiliza para el juicio de molestia en la función de anti-molestia. Si Bit2 en F8-08 se establece en 1, el sistema lleva a cabo el juicio de molestia con el interruptor de carga ligera. 30% de la carga nominal se considera como carga ligera. 71: Señal de media carga Se utiliza para la determinación de dirección de funcionamiento de emergencia en caso de corte de energía. 72: Señal de conmutación de piso de emergencia de incendio El NICE3000new admite dos pisos de emergencia de incendio. Por defecto, el ascensor se detiene en el piso de emergencia de incendio 1 en el estado de emergencia de incendio. Si esta señal está activa, el ascensor se detiene en el piso de emergencia de incendio 2 en el estado de emergencia de incendio. Código de función F5-25 Nombre del parámetro Tipo de entrada de CTB Rango de Defecto ajuste 0–511 Unid Propieda ad d - ★ 320 Se utiliza para definir el tipo de entrada de señal (NA / NC) del CTB por bit binario. Por ejemplo, los tipos de señales de entrada de CTB de un ascensor se establecen como sigue: Bit Bit0 Bit1 Bit2 Nombre del parámetro Cortina de luz de máquina de puerta 1 Cortina de luz de máquina de puerta 1 Límite de apertura de máquina de puerta 1 Defect o Bit 0 Bit5 0 Bit6 0 Bit7 Nombre del parámetro Límite de cierre de máquina de puerta 2 Señal de plena carga (digital) Señal de sobrecarga(digital) Defect o 0 1 0 Bit Bit3 Bit4 Nombre del parámetro Límite de apertura de máquina de puerta e Límite de cierre de máquina de puerta 1 Código de función Defect o 0 0 Nombre del parámetro Bit Nombre del parámetro Bit8 Señal de carga ligera(digital) Defect o 1 0: Entrada de NA; 1: Entrada de NO Rango de ajuste Defecto Unidad Propied ad F5-26 Selección de función de Y1 1 - ★ F5-27 Selección de función de Y2 2 - ★ F5-28 Selección de función de Y3 3 - ★ F5-29 Selección de función de Y4 4 - ★ F5-30 Selección de función de Y5 0 - ★ F5-31 Selección de función de Y6 0 - ★ 0–31 Estos parámetros se utilizan para ajustar las funciones de los terminales de salida de relé de Y1 a Y6. 00: Inválido El terminal no tiene ninguna función. 01: Control del contactor de RUN; 02: Control del contactor de freno; 03: Control del contactor de cortocircuirto de circuito de bloqueo de la puerta El terminal con una de estas funciones controla si el contactor está abierto o cerrado. 04: Señal de retroalimentación de llegada de piso de emergencia de incendio En el estado de emergencia de incendio, el sistema envía la señal de realimentación para el monitoreo después de que el ascensor pare en el piso de emergencia de incendio. 05: Apertura de máquina de puerta 1 06: Cierre de máquina de puerta 1; 07: Apertura de máquina de puerta 2 ; 08: Cierre de máquina de puerta 2 El terminal con una de estas funciones se utiliza para controlar la apertura / cierre de la puerta 1/2. 09: Contactores de freno y de RUN saludable Cuando los contactores de freno y de RUN funcionan correctamente (estado no Err36 / Err37), el sistema envía la señal de realimentación para el monitoreo. 10: Estado de fallo El terminal con la función tiene salida cuando el sistema está en el estado de fallo de nivel-3, 4-nivel o nivel-5. 11: Monitor de funcionamiento El terminal con la función tiene salida cuando el controlador está funcionando. 12: Contactor de cortocircuito de estator de PMSM Cuando se aplica el contactor de cortocircuito del estator de PMSM en motor síncrono, el terminal con la función se utiliza para controlar si el contactor está abierto o cerrado. Para más detalles, véase la sección 5.2. 13: Conmutación automática de evacuación de emergencia Cuando se detecta que la tensión de bus disminuye a un cierto valor después de que se produzca un fallo de alimentación de la red eléctrica, el controlador emite esta señal y utiliza la batería para la alimentación temporal para realizar el funcionamiento de evacuación de emergencia. Sólo Y6 / M6 se puede asignar con esta función porque el controlador tiene que depender de su poder residual para impulsar el relé al corte de energía de la red eléctrica. 14: Sistema saludable El terminal con la función tiene salida cuando el sistema funciona correctamente. 15: Control de zumbador de emergencia El terminal con la función tiene salida cuando el sistema está en el estado de funcionamiento de evacuación de emergencia, haciendo que el zumbador emita sonidos. 16: Arranque de alto voltaje de freno Esta función se utiliza para el freno que mantiene el estado de liberación con reducción de voltaje. El terminal con esta función mantiene la salida para 4s para liberar el freno, y después el voltaje se reduce para mantener el estado de liberación del freno. 17: Funcionamiento de ascensor en dirección hacia arriba El terminal con la función tiene salida cuando el ascensor funciona en la dirección hacia arriba. 18: Funcionamiento de lámpara / ventilador Se utiliza para la salida de funcionamiento de ventilador/ lámpara, el mismo que salida de control de ahorro de energía del CTB. 19: Esterilización médica Se utiliza para controlar la salida de la señal de esterilización de lámpara ultravioleta. Después de que el ascensor deje de funcionar y la lámpara / ventilador deje de funcionar, se inicia la salida de esterilización médica. 20: Parada en zona sin puerta El terminal con esta función tiene salida cuando el ascensor para en zona sin puerta. 21: Cerradura eléctrica Se utiliza para controlar la aplicación y la liberación de la cerradura eléctrica en el caso de la puerta manual. 22: Estado sin servicio Esta función se utiliza cuando el ascensor está en el estado de no-servicio y no puede responder a las llamadas de piso. Código de función Nombre del parámetro Visualización de estado F5-32 de Comunicación Rango de ajuste Defect Unid Propied o ad ad - - ● Monitoreo de estados de comunicación de CANbus y Modbus Se utiliza para supervisar el estado de comunicación de CANbus con CTB y comunicación de Modbus con el HOP. Al entrar en el menú de F5-32, los LEDs en el panel de operación indican el estado de comunicación de HOP actual. Los LEDs están dispuestos como 5, 4, 3, 2, 1 de izquierda a derecha. Figura 7-4 Supervisión del estado de comunicación Cada segmento de los LEDs se define en la siguiente tabla. Table 7-2 Definición de segmentos de LED Correspondiente dirección de comunicación normal de Significado del segmento Modbus encendido LED No. A B C D E F G DP 1 1 2 3 4 5 6 7 8 2 9 10 11 12 13 14 15 16 3 17 18 19 20 21 22 23 24 Comunicación de Modbus de HOP normal 4 25 26 27 28 29 30 31 Reservad o Correspondiente dirección de comunicación anormal de Significado del segmento Modbus apagado LED No. A B C D E F G DP 1 1 2 3 4 5 6 7 8 2 9 10 11 12 13 14 15 16 3 17 18 19 20 21 22 23 24 4 25 26 27 28 29 30 31 LED No. Comunicación de Modbus de HOP normal Reservad o Estado de Comunicación de CANbus de CTB Número que muestra el LED 5 Por ejemplo, si los LEDs se muestran como la siguiente figura, que indica que la comunicación de Modbus de las direcciones 1, 5, 6, 7, 12, 15, 16, 18, 19, 21, 22, 23, 25, 26 y 27 son anormales. La comunicación de Modbus de otras direcciones es normal. El estado de comunicación de CANbus mostrado por el LED es de 3, lo que indica la comunicación normal. Figura 7-5 Ejemplo del indicador de LED que indica el estado de comunicación Código de función F5-33 Nombre del parámetro Selección de programa de Rango de ajuste 0–65535 Defecto 1 Unid Propied ad ad - ★ control Se utiliza para ajustar las funciones del ascensor. Si una función está activada se indica mediante un bit binario: "1" indica que la función está activada, y "0" indica que la función está desactivada. Las funciones definidas por los bits binarios se describen en la siguiente tabla. Tabla 7-3 Funciones indicadas por los bits de F5-33 Bit Bit3 Bit4 Función Descripción Requisito de emergencia de Si está habilitada, las funciones de emergencia incendio de ascensor de incendio de F6-44 aplicadas a Hong Kong se Hong Kong activarán automáticamente. Gong de llegada desactivado en El gong de llegada está desactivado desde las la noche 22:00 pm hasta las 07 a.m. Cerradura Bit6 para de desconectada la puerta cuando inspección cambia a marcha normal Bit7 Bit8 Defecto 0 0 La cerradura de la puerta se desconecta adicionalmente cuando el estado de inspección 0 se conmuta al estado de funcionamiento normal. Código de error no aparece en El teclado no parpadea para mostrar el código el teclado de error. Comando de apertura de puerta El sistema cancela inmediatamente el comando cancelado inmediatamente al de apertura de puerta después de haber recibido límite de apertura de puerta el límite de apertura de la puerta. 0 0 Cuando la realimentación de freno es anormal, En retroalimentación de freno anormal el coche se detiene y Bit9 se manitne el par de velocidad de cero el ascensor llega a la posición de zona-de-puerta y se detiene. La puerta se mantiene cerrada, y el sistema mantiene la salida de par el mayor tiempo posible. Después de la sobrecarga del 0 sistema, no hay par de salida, y el ascensor puede caer en este caso. Tenga cuidado con el uso de esta función. Código de Nombre del función parámetro F5-34 Visualización de estado de terminal F5-35 Visualización de estado de terminal Rango de ajuste El monitoreo de los terminales de E / S en MCB Unid Propied ad ad - - ● - - ● Defecto El monitoreo de los terminales de E / S en CTB, CCB y HOP Estos parámetros se utilizan para vigilar el estado de todos los terminales de E / S del sistema. Los LEDs de F5-34 / F5-35 están dispuestos como 5, 4, 3, 2, 1 de izquierda a derecha. Figura 7-6 El monitoreo de todos los terminales de E / S Cada segmento de los LEDs se define en la siguiente tabla. Tabla 7-4 Definición de segmentos de LED F5-34 No. Segment Indicación No. o A B C D 1 F5-35 E B arriba Señal de nivelación C abajo Señal de zona de puerta circuito de seguridad 1 D 1 E Retroalimentación de F Indicación o A Señal de nivelación Retroalimentación de Segment Cortina de luz 1 Cortina de luz 2 Límite de apertura de puerta 1 Límite de apertura de puerta 2 Límite de cierre de puerta 1 Límite de cierre de F circuito de bloqueo de la puerta 2 puerta 1 G DP A B C 2 D E F Retroalimentación de G contactor de RUN Retroalimentación de DP contactor de freno 1 Señal de inspección A Señal de inspección B arriba Señal de inspección C abajo Señal de emergencia de incendio Señal de límite arriba Señal de límite abajo 2 D E F Señal de sobrecarga G Señal de plena carga Señal de sobrecarga Botón de abrir la puerta Botón de cerrar la puerta Botón de retardo de apertura de puerta Señal de parada directa Señal de operador Señal de cambio de dirección Señal de G funcionamiento independiente DP A B C D 3 E F Señal de plena carga DP Señal de deceleración A arriba 1 B abajo 1 C arriba 2 Salida de cierre de Señal de bloqueo de puerta Señal de deceleración D abajo 1 Salida de apertura de puerta 2 3 Señal de deceleración E Salida de cierre de puerta 2 F abajo 3 Señal de bloqueo de puerta Retroalimentación de G Salida de apertura de puerta 1 Señal de deceleración arriba 3 bombero puerta 1 Señal de deceleración Señal de deceleración Señal de operación de G Gong de llegada arriba DP Gong de llegada abajo A Visualización de botón contactor de cortocircuito de circuito de bloqueo de puerta DP A Señal de funcionamiento del bombero Cortina de luz de máquina de puerta 1 B de abrir la puerta Cortina de luz de B máquina de puerta 2 C Visualización de botón de cerrar la puerta Retroalimentación de C contactor de freno 2 Visualización del botón de retardo de apertura de la puerta D Entrada del UPS D Parada en zona sin puerta 4 E Entrada de bloqueo de 4 E Reservado F Salida del zumbador G Reservado DP Señal de ahorro de ascensor F Retroalimentación de circuito de seguridad 2 G Retroalimentación de contactor de cortocircuito de estator de PMSM DP Retroalimentación de circuito de cerradura de energía puerta 2 5 A Reservado 5 A Estado de sistema de cortina de luz 1 B Salida de contactor de B RUN C Estado de sistema de cortina de luz 2 Salida de contactor de C freno Entrada de bloqueo de ascensor de llamada de piso D E Control de contactor de D Entrada de emergencia cortocircuito de de incendio de llamada cerradura de puerta de piso Señal de llegada de piso E Señal de plena carga Señal de sobrecarga de emergencia de incendio F - F DP - DP Código de función F5-36 Nombre del parámetro - Rango de ajuste Defecto 0–3 1 Selección de la entrada de celda de carga Unid Propied ad ad - ★ Se utiliza para establecer el canal de ajuste de la señal de la célula de carga de ascensor. Cuando se utiliza un dispositivo de célula de carga, ajuste este parámetro correctamente primero. Los valores son los siguientes: 0: Inválido 1: Entrada digital de CTB 2: Entrada analógica de CTB 3: Entrada analógica de MCB Código de Nombre del función parámetro F5-37 Selección de función de X25 F5-38 Selección de función de X26 F5-39 Selección de función de X27 Rango de ajuste 0: Inválido Unid Propied ad ad 0 - ★ 0 - ★ 0 - ★ Defecto 4: Señal de circuito de seguridad 5: Señal de circuito de bloqueo de puerta Estos parámetros se utilizan para ajustar las funciones de los terminales de entrada de detección de corriente de alta intensidad X25 a X27. Las funciones 0, 4, y 5 se pueden asignar varias veces para terminales. Si X25 a X27 no se utilizan, cancelar el ajuste de estos parámetros. Grupo F6: Parámetros básicos de ascensor Código de función F6-00 F6-01 Rango de Nombre del parámetro ajuste Piso superior del ascensor Piso inferior del ascensor F6-01 a 40 1 a F6-00 Propied Defecto Unidad 9 - ★ 1 - ★ ad Estos dos parámetros se utilizan para ajustar el piso superior y el piso inferior del ascensor, determinado por el número de placas de nivelación realmente instaladas. Código de función F6-02 Rango de Nombre del parámetro ajuste Piso de aparcamiento F6-01 a F6-00 Defecto Unidad 1 - Propied ad ★ Cuando el tiempo de inactividad del ascensor supera el valor establecido en F9-00, el ascensor vuelve al piso del aparcamiento de forma automática. Código de función F6-03 Rango de Nombre del parámetro Piso de incendio ajuste emergencia de F6-01 a F6-00 Defecto 1 Unidad - Propied ad ★ Al entrar en el estado de volver al piso de emergencia de incendio, el ascensor vuelve a este piso. Código de función F6-04 Nombre del parámetro Piso de bloqueo de ascensor Rango de ajuste Defecto Unidad Propied ad F6-01 a F6-00 1 ★ Al entrar en el estado de bloqueo de ascensor, el ascensor vuelve a este piso. Código de Nombre del función parámetro F6-05 Pisos de servicio1 Propied Rango de ajuste Defecto Unidad 0–65535 (pisos 1–16) 65535 - ★ ★ ★ F6-06 Pisos de servicio 2 0–65535 (pisos 17–32) 65535 - F6-35 Pisos de servicio 3 0–65535 (pisos 33–40) 65535 - ad Estos parámetros se utilizan para ajustar los pisos de servicio entre los pisos 1-40. F6-05 (pisos de servicio 1) corresponde a los pisos 1-16. F6-06 (pisos de servicio 2) corresponde a los pisos 17 a 32. F6-35 (pisos de servicio 3) corresponde a los pisos 33 a 40. Ajuste estos parámetros de la siguiente manera: Se permiten o no pisos de servicios de un parámetro se indica mediante un número binario de 16 bits. Los 16 bits corresponden respectivamente a 16 pisos de bajo a alto. "1" indica que el ascensor va a responder a las llamadas de este piso, y "0" indica que el ascensor no responde a las llamadas de este piso. Por ejemplo, los pisos de servicio de un ascensor de 16 pisos se enumeran en la tabla siguiente. Tabla 7-5 Pisos de servicio de un ascensor de 16 pisos Bit Pisos Servicio o no Ajuste Bit Piso Servicio o no Ajuste Bit0 Piso 1 Permitido 1 Bit8 Piso 9 Prohibido 0 Bit1 Piso 2 Prohibido 0 Bit9 Piso 10 Permitido 1 Bit2 Piso 3 Permitido 1 Bit10 Piso 11 Permitido 1 Bit3 Piso 4 Permitido 1 Bit11 Piso 12 Prohibido 0 Bit4 Piso 5 Permitido 1 Bit12 Piso 13 Permitido 1 Bit5 Piso 6 Permitido 1 Bit13 Piso 14 Permitido 1 Bit6 Piso 7 Permitido 1 Bit14 Piso15 Permitido 1 Bit7 Piso 8 Prohibido 0 Bit15 Piso 16 Permitido 1 El número binario indicado por la tabla anterior es 1111011001111101. El equivalente decimal de este número binario es 63101. Entonces ajuste F6-05 en 63101. Código de función Nombre del parámetro Rango de ajuste Defecto Unidad Propied ad F6-07 Número de ascensores en el modo de grupo 1–8 1 - ★ F6-08 No. de ascensor 1–8 1 - ★ Estos parámetros se utilizan para establecer el número de ascensores y No. de ascensor en el modo grupo / paralelo. 1. Si F6-07 se establece en 1, el ajuste de F6-08 se vuelve inválido. 2. Ascensor No. 1 es el ascensor principal en modo paralelo / grupo y completa la mayoría de las lógicas paralelas / de grupo. Código de función F6-09 Nombre del parámetro Control de programa de ascensor Rango de ajuste Defecto 0–65535 0 Unidad - Propied ad ★ Se utiliza para seleccionar las funciones requeridas del ascensor. Si una función está activada o no se indica mediante un bit binario: "1" indica que la función está activada, y "0" indica que la función está desactivada. Las funciones definidas por los bits binarios se describen en la siguiente tabla. Tabla 7-6 Funciones indicadas por los bits de F6-09 Bit Función Descripción Defecto En el estado de ascensor único o en modo paralelo, si esta función está habilitada, un ascensor inactivo no Bit0 Espera dispersa volverá al pido de base. 0 En el modo de grupo, esta función se utiliza junto con el tablero de control de grupo para realizar espera dispersa. Bit3 Control paralelo/ grupo realizado en CAN2 Esta función se activa cuando el modo paralelo / grupo se realiza en CAN 2. 0 Esta función se utiliza cuando el NICE3000 está incluido Bit4 Control de grupo en la compatibilidad con NICE3000 en el sistema de control de grupo. El ajuste de este bit 0 debe ser el mismo que el de todos los otros ascensores en el grupo. Bit6 Bit8 Eliminar número de piso y indicar dirección de antemano El número de piso que se muestra se elimina antes de Botón de llamada de piso único Se aplica a las aplicaciones donde sólo hay un botón de Juicio de Err30 en la Bit10 cancelación de re-nivelación Bit14 Intervalo de tiempo de detección de circuito de seguridad 2 y circuito de bloqueo de puerta 2 Código de función que el ascensor llega al piso de destino. modificada aparece con antelación. 0 llamada de piso. Indica el juicio de Err30 cuando se cancela la 0 renivelación. Si los estados de los circuitos de seguridad 1 y 2 o los estados de los circuitos de bloqueo de puerta 1 y 2 son 0 incompatibles, el sistema prohibe el funcionamiento. Después de que los estados restablezcan normales, el sistema se enciende de nuevo y comienza a funcionar. Nombre del parámetro Tiempo de retardo sensor de nivelación F6-10 0 Si el ascensor tiene que cambiar la dirección, la dirección de Rango de ajuste 10–50 Defecto Unidad 14 ms Propied ad ★ Se indica el tiempo de retardo desde el momento en que el sensor de nivelación actúa hasta el momento en que la señal de nivelación se activa. No es necesario modificarlo. Código de función F6-11 Nombre del parámetro Selección de función de ascensor Rango de ajuste 0–65535 Defecto 8448 Unidad Propied - ad ★ Se utiliza para ajustar las funciones del ascensor. "1" indica que la función está activada, y "0" indica que la función está desactivada. Las funciones definidas por los bits binarios se describen en la siguiente tabla. Tabla 7-7 Funciones indicadas por los bits de F6-09 Bit Función Descripción Desactivación de regreso a piso de base para la verificación La función de volver al piso de base para la verificación Bit1 Cancelación de organización secuencial automática de direcciones de llamada Si la visualización de un piso en el grupo FE se Bit2 debido a la gran desviación de la posición de la cabina Defect o 0 está desactivada. establece en 1, los siguientes pisos que se mostrarán se organizan automáticamente en el orden ascendente. 0 de piso a visualizar Este código de función es para cancelar esta función. Bit5 Detección de corriente válida en el arranque para el motor síncrono El controlador realiza la detección de la corriente de salida cuando se arranca el motor síncrono. Si la corriente es anormal, la salida se bloquea y el funcionamiento será prohibido. 0 Bit6 Invertir la salida de la lámpara de MCB Después de que esta función está activada, la lógica de la salida de la lámpara de MCB se invierte. 0 Bit7 Apertura de puerta válida en zona sin-puerta en el estado de inspección En el estado de inspección, puede abrir / cerrar la puerta pulsando el botón de abrir/ cerrar puerta en la zona sin-puerta. 0 Bit8 Puerta se abre y de cierra de una vez después de que la inspección se vuelve a la normalidad La puerta del ascensor se abre y se cierra una vez después de que el sistema cambia de inspección de primera-vez a funcionamiento normal. 1 Bit10 Zumbador no pío en la renivelación El zumbador en el interior del coche no pío en la re-nivelación. 0 Bit11 Función del piso súper corto El controlador no puede realizar ajuste de ducto si la altura del piso es inferior a 500 mm. Después de que esta función está activada, el ajuste de ducto se puede realizar normalmente. 0 Bit12 Reajuste automático de fallo El controlador restablece automáticamente los fallos una vez cada hora. 0 Cuando se informa Err53, si las condiciones de límite de apertura de puerta válido y el bloqueo de la puerta liberado están satisfechos, el controlador restablece Err53 automáticamente. Se permite un máximo de tres veces de auto reajuste. 1 No re-ajuste de desaceleración arriba por piso súper corto Si esta función está activada, la señal de desaceleración arriba 1 no restablece la visualización de piso. La señal de desaceleración abajo 1 todavía restablece la visualización de piso. Esto sólo es válido cuando la función de piso súper corto personalizada está habilitada. 0 No re-ajuste de desaceleración abajo por piso súper corto Si esta función está activada, la señal de desaceleración abajo 1 no restablece la visualización de piso. La señal de desaceleración arriba 1 todavía restablece la visualización de piso. Esto sólo es válido cuando la función de piso súper corto personalizada está habilitada. 0 Bit13 Bit14 Bit15 Reajuste automático de fallo de Err53 Código de función F6-12 Nombre del parámetro Piso de VIP Rango de ajuste 0 a F6-00 Defecto Unidad 0 - Propied ad ★ Se utiliza para establecer el piso de vip. Para más detalles, véase la sección 5.2.4. Código de función F6-13 Nombre del parámetro Piso de Seguridad Rango de ajuste 0 a F6-00 Defecto Unidad 0 - Propied ad ★ Se utiliza para establecer el piso de seguridad del ascensor. Si la señal de seguridad está activa o que es durante el período de seguridad de noche, el ascensor va al piso de seguridad primero cada vez, se detiene y abre la puerta, y luego se dirige al piso de destino. El ascensor puede hacerse parar en el piso de seguridad en las siguientes dos maneras: Fd-07 / Fd-08 se establece en 5 (Señal de Seguridad). Si la señal de seguridad está activa, el ascensor entra en el estado de seguridad: La función del piso de seguridad en noche está habilitada (FE-32 Bit5 = 2), el ascensor entra en el estado de seguridad de 22:00 pm a 6:00 am. Código de Nombre del parámetro función F6-14 F6-15 F6-16 F6-17 Hora de inicio de selectivo colectivo abajo 1 Hora de fin de selectivo colectivo abajo 1 Hora de inicio de selectivo colectivo abajo 2 Hora de fin de selectivo colectivo abajo 2 Rango de Defect ajuste o 00.00–23.59 00.00 — ☆ 00.00–23.59 00.00 — ☆ 00.00–23.59 00.00 — ☆ 00.00–23.59 00.00 — ☆ Unidad Propied ad Estos cuatro parámetros definen los períodos de tiempo de colectivo selectivo abajo 1 y colectivo selectivo abajo 2, durante el cual, el ascensor sólo responde a llamadas de piso hacia abajo. Código de Rango de Propied Defecto Unidad 00.00–23.59 00.00 HH.MM ☆ 00.00–23.59 00.00 HH.MM ☆ 0–65535 65535 - ☆ F6-21 Piso de servicio 2 del servicio de piso basado en el tiempo 1 0–65535 65535 - ☆ F6-36 Piso de servicio 3 del servicio de piso basado en el tiempo 1 0–65535 65535 - ☆ 00.00–23.59 00.00 HH.MM ☆ función Nombre del parámetro ajuste ad Hora de inicio del servicio F6-18 de piso basado en el tiempo 1 F6-19 Hora de fin del servicio de piso basado en el tiempo 1 Piso F6-20 de servicio 1 del servicio de piso basado en el tiempo 1 Hora de inicio del servicio F6-22 de piso tiempo 2 basado en el F6-23 Hora de fin del servicio de piso basado en el tiempo 2 Piso F6-24 de servicio 1 00.00–23.59 00.00 HH.MM ☆ 0–65535 65535 - ☆ del servicio de piso basado en el tiempo 2 F6-25 Piso de servicio 2 del servicio de piso basado en el tiempo 2 0–65535 65535 - ☆ F6-37 Piso de servicio 3 del servicio de piso basado en el tiempo 2 0–65535 65535 - ☆ Estos parámetros definen los períodos de tiempo de dos grupos de servicios basados en el tiempo y los pisos de servicio correspondientes. Piso de servicio 1 corresponde a los pisos 1-16, piso de servicio 2 corresponde a los pisos 17 a 32, y piso de servicio 3 corresponde a los pisos 33 a 40. En el período de tiempo de servicio basado en el tiempo 1 (establecido por F6-18 y F6-19), el ascensor responde a los pisos de servicio establecidos por F6-20, F6-21 y F6-36 pero ignora los pisos de servicio establecidos por F6 -05, F6-06 y F6-35. El ajuste de los pisos de servicio basado en el tiempo es el mismo que el de los pisos de servicio en F6-05. 1. Durante el período de servicio de piso basado en el tiempo, los ajustes de F6-05, F6-06 y F6-35 son inválidos. 2. Si se plegan los dos períodos de servicio de piso basado en el tiempo 1 y el servicio de piso basado en el tiempo 2, el sistema realiza el servicio de piso basado en el tiempo 1, ya que tiene el nivel de prioridad más alto. Código de Nombre del función parámetro F6-26 Propied Rango de ajuste Defecto Unidad Hora de inicio de pico 1 00.00–23.59 00.00 HH.MM ☆ F6-27 Hora de fin de pico 1 00.00–23.59 00.00 HH.MM ☆ F6-28 Piso de pico 1 F6-01 a F6-00 1 - ★ F6-29 Hora de inicio de pico 2 00.00–23.59 00.00 HH.MM ☆ F6-30 Hora de fin de pico 2 00.00–23.59 00.00 HH.MM ☆ F6-31 Piso de pico 2 F6-01 to F6-00 1 - ★ ad Estos parámetros definen dos periodos de tiempo de pico en modo paralelo/ grupo y los pisos correspondientes. Durante un período de tiempo de pico, si hay más de tres llamadas de cabina de piso de pico, el ascensor entra en el estado de servicio de pico. Por el momento, las llamadas de cabina de piso de pico son válidas todo el tiempo. El ascensor vuelve a este piso si está inactivo. Código de función F6-38 F6-39 Rango de Nombre del parámetro Hora de inicio de bloqueo de ascensor Hora de fin de bloqueo de ascensor ajuste Defecto 00.00–23.59 00.00 00.00–23.59 00.00 Unidad Propied ad HH.MM ☆ HH.MM ☆ Estos dos parámetros definen el período de tiempo de bloqueo del ascensor, durante el cual de bloqueo del elevador automático tiene el mismo efecto que el bloqueo del ascensor por medio del interruptor de bloqueo de ascensor. Código de función F6-40 F6-41 F6-42 Nombre del parámetro Selección de control de programa1 Selección de control de programa 2 Selección de control de programa 3 Rango de Propied Defecto Unidad 0–65535 0 - ★ 0–65535 0 - ★ 0–65535 0 - ★ ajuste ad Estos parámetros se utilizan para ajustar las funciones de control del programa. "1" indica que la función está activada, y "0" indica que la función está desactivada. Las funciones definidas por los bits binarios se describen en la siguiente tabla. Tabla 7-8 Funciones indicadas por los bits de F6-40 a F6-42 F6-40 Selección de control de programa1 Bit Función Bit0 Función de discapacidad Descripción Se utiliza para activar o desactivar la función de discapacidad. Defecto 0 Cuando las señales de desaceleración arriba y de Bit1 Función de límite de software nivelación abajo están activas y la señal de nivelación arriba está inactiva, el sistema considera que se realiza 0 el límite arriba. Es lo mismo para la señal de límite abajo. Esta función se activa si se utiliza la función de puerta Bit2 Entrada de JP16 utilizada como selección de puerta opuesta opuesta. Cuando JP16 tiene entrada, el ascensor se abre sólo la puerta opuesta. Cuando JP16 no tiene 0 entrada, el ascensor sólo se abre la puerta delantera. Entrada de JP16 Bit3 utilizada como señal de JP16 se utiliza como la entrada de la señal de apertura apertura de puerta de la puerta opuesta. 0 opuesta Bit4 Apertura de una sola puerta de puertas opuestas bajo control Esta función sólo se activa en el modo de control de la puerta opuesta 3. En este caso, sólo una puerta se abre 0 manual cada vez, mientras que la otra puerta debe permanecer en el estado de límite de cierre de puerta. En el grupo Fd, la entrada extendida de HCB-B incluye la "Selección de puerta individual/ doble". Si esta entrada está activa, ambas puertas se abren si hay una llamada de cabina. F6-38 / F6-39 es válida sólo cuando se activa esta Bit5 Bloqueo del ascensor temporizado Bit6 Puerta manual Bit7 Reservado - 0 Bit8 Reserved - 0 Desactivación de Bit9 eliminación de número de piso en inversión de dirección Bit10 Visualización del número del próximo piso a llegar Bit11 Responder a las llamadas de cabina primero Bit12 Comando asistado de llamada de cabina en una sola puerta se utiliza como función de discapacidad Bit13 Mando plegable utilizado como función de discapacidad y función de puerta trasera función. Esta función se utiliza para el ascensor con la puerta manual. 0 0 El sistema borra todas las llamadas actuales de cabina cada vez que el ascensor cambia la dirección por defecto. Cuando esta función está activada, la función de 0 eliminar los números de piso en inversión de dirección está desactivada. El siguiente piso por llegar se muestra durante el funcionamiento del ascensor. El sistema responde a las llamadas de piso sólo después de que todas las llamadas de cabina sean realizadas. 0 0 Puede configurar el terminal de mando auxiliar (CN8) en el CTB para la entrada de las llamadas de discapacidad 0 (mando plegable no es obligatorio). Sólo es válido cuando la función de Bit14 está habilitada. Bit13 = 1: Discapacidad 0 Bit13 = 0: Puerta trasera Mando plegable de llamada de coche: A. Este código de función está inactivo.CN7 se utiliza para las llamadas de la puerta delantera o las llamadas ordinarias, y CN8 se utiliza para las llamadas de puerta Bit14 Mando plegable de llamada de coche trasera o llamadas de discapacidad. B. Este código de función está activo. Para CN7 y CN8, 0 las entradas 1 a 16 se utilizan para las llamadas de puerta delantera o las llamadas ordinarias, y las entradas 17 a 32 se utilizan para las llamadas de puerta trasera o llamadas de discapacidad. Bit15 JP20 se utiliza para la conmutación de puerta trasera JP20 se utiliza para la entrada de conmutación entre la puerta delantera y la puerta trasera. 0 F6-41 Selección de control de programa 2 Bit Función Descripción Defecto Bit0 Reservado - 0 Bit1 Reservado - 0 Para forzada en Durante el funcionamiento de inspección, si la inspección debido a la desaceleración 1 actúa, el sistema desacelera hasta deceleración 1 parar. Bit3 Reservado - 0 Bit4 Zumbador pío durante la demora de apertura de puerta El zumbador pío cuando se alcanza el tiempo de demora de apertura de la puerta ajustado en Fb-14. 0 Bit5 Reservado - 0 Bit6 Cancelación de demora de apertura de puerta La demora de apertura de puerta se cancela cuando se pulsa el botón de demora de apertura de puerta de nuevo. 0 Bit7 Reservado - 0 Bit8 Apertura de puerta en bloqueo de ascensor En el estado de bloqueo del ascensor, el ascensor mantiene la puerta abierta en el piso de bloqueo del ascensor. 0 Bit9 Visualización disponible en bloqueo del ascensor En el estado de bloqueo del ascensor, llamadas de piso se muestran normalmente. 0 Bit10 Bloqueo del ascensor en el estado de operador El ascensor se bloquea correctamente en el estado de operador. 0 Bit11 Parpadea a la llegada La pantalla del coche parpadea cuando el ascensor llega a un piso. El tiempo de antelación de parpadear se establece en F6-47. 0 Bit12 Re-apertura de puerta durante la demora de la apertura de puerta La puerta se abre de nuevo si la entrada de demora de apertura de puerta está activa durante el cierre de puerta. 0 Bit13 Re-apertura de puerta después de la llamada de cabina del piso actual La puerta se abre de nuevo si la llamada de cabina del piso actual es válida durante el cierre de la puerta. 0 Bit2 0 F6-42 Selección de control de programa 3 Bit Función Descripción Bit0 Reservado - Bit1 Cancelación de mando de apertura / cierre en la demora después del límite de apertura / cierre de puerta Si se activa esta función, el mando de apertura / cierre de la puerta es cancelada por el retraso de 1s tras el límite de apertura / cierre de la puerta. Bit2 No juzgar el estado de bloqueo de puerta en la salida de cierre de puerta En condiciones normales, el sistema determina que la puerta está completamente cerrada sólo cuando la señal de cierre de puerta está activa y se aplica el bloqueo de la puerta. Defecto 0 0 0 Si esta función está activada, el sistema no necesita juzgar el estado de bloqueo de la puerta. Bit3 Salida de mando de cierre de puerta durante el funcionamiento El mando de cierre de puerta se emite de forma continua durante el funcionamiento del ascensor. 0 Bit4 En la primera vez de Cuando esta función esta activa, en la primera vez de encenderse, el ascensor marcha al piso inferior. 0 encenderse vuelve al piso de extremo para comprobar Bit5 En el bloqueo de ascensor parar en el piso cercano Código de Durante el funcionamiento del ascensor, si la señal de bloqueo de ascensor está activa, el ascensor elimina las llamadas de cabina y de piso y para en el piso cercano. Nombre del parámetro función Selección de función de F6-43 operador Rango de ajuste Defecto 0–65535 Unidad 0 - 0 Propied ad ★ Se utiliza para seleccionar las funciones de ascensor relacionadas con operador. "1" indica que la función está activada, y "0" indica que la función está desactivada. Las funciones definidas por los bits binarios se describen en la siguiente tabla. Tabla 7-9 Funciones relacionadas con operador indicadas por los bits de F6-43 F6-43 Selección de la función de operador Bit Bit0 Función Descripción Defecto Llamadas canceladas .Todas las llamadas de cabina y llamadas de piso se 0 después de entrar en el cancelan cuando el sistema entra en el estado de estado de operador operador por primera vez. En el interior del coche se parpadea, lo que informa Bit1 Bit2 No responde a las que hay llamadas de piso, pero el sistema no llamadas de piso responde. Conmutación entre Si esta función está activada, el ajuste de F5-00 estado de operador/ (Tiempo de conmutación de operador / normal) es automático válido. La puerta del ascensor se cierra después de que el Bit3 Cerrar la puerta al trote 0 0 0 operador pulsa el botón para cerrar la puerta manualmente. Bit4 Bit5 Bit6 Cierre automático de la puerta Zumbador pía a intervalos en el estado de operador Es el mismo que el estado normal. Una vez alcanzado el tiempo de retención de la puerta 0 abierta, la puerta se cierra automáticamente. Cuando el piso de llamada de sala y el piso de llamada de cabina son diferentes, el zumbador pío 0 2.5s a intervalos. Zumbador pía de forma Cuando el piso de llamada de sala y el piso de continua en el estado de llamada de cabina son diferentes, el zumbador pía operador de forma continua. 0 Código de Nombre del parámetro función F6-44 Selección de función de emergencia de incendio Rango de ajuste Defecto Unidad 0 - 0–65535 Propied ad ★ Se utiliza para seleccionar las funciones de emergencia de incendio. "1" indica que la función está activada, y "0" indica que la función está desactivada. Las funciones definidas por los bits binarios se describen en la siguiente tabla. Table 7-10 Funciones de emergencia de incendio indicadas por los bits de F6-44 F6-44 Selección de función de emergencia de incendio Bit Bit0 to Bit2 Función Reservado Descripción - Defecto 0 Salida de gong de Bit3 llegada en el estado de El gong de llegada se da salida en el estado de inspección o de inspección o de emergencia de incendio. 0 emergencia de incendio Bit4 Bit5 Múltiples llamadas de Múltiples llamadas de cabina se pueden registrar en cabina registradas en el el estado de emergencia de incendio. De lo estado de emergencia contrario, sólo una llamada de cabina se puede de incendio registrar. Retentivo al corte del En el estado de emergencia de incendio, el estado suministro eléctrico en actual del sistema y del coche se memoriza al corte el estado de del suministro eléctrico y se reanudarán después de emergencia de incendio que el sistema se vuelva a encender. 0 0 En el estado de de emergencia de incendio, el Bit6 Cerrar la puerta proceso de cierre de la puerta se puede completar manteniendo pulsado el sólo manteniendo pulsado el botón de cierre de la botón de cierre de puerta hasta que se alcance el límite de cierre de la puerta puerta. De lo contrario, se cambiará a la apertura de 0 puerta automáticamente. Bit7 Bit8 Reservado - Cerrar la puerta en el El ascensor entra en el proceso de cierre de la registro de llamada de puerta automáticamente si una llamada de cabina cabina se ha registrado. 0 0 Manifestación de Bit9 llamadas de piso en el Llamadas de piso se muestran en el estado de estado de emergencia emergencia de incendio. 0 de incend JP22 se utiliza como salida de funcionamiento Bit10 Funcionamiento forzado por bombero. forzado por bombero En el estado de funcionamiento de bombero, si se pulsan al mismo tiempo la salida de JP22 y el botón 0 de cerrar puerta, el zumbador en el interior de la cabina pía y se emite la salida del cierre de puerta.Si en 10s no se conecta el bloqueo de puerta, el sistema da salida del contactor de cortocircuito de puera y el ascensor inica el funcionamiento(se necesita utilizar junto con SCB-A). Bit11 Salir de estado de El sistema puede salir del estado de emergencia de emergencia de incendio incendio sólo después de que el ascensor llegue al para los bomberos piso de emergencia de incendio. 0 No eliminar las llamadas de cabina en Bit12 la segunda vez de abrir la puerta el estado de bombero Bit13 Reservado En el estado de bombero, en la segunda vez de abrir la puerta no se elimina las llamadas de cabina 0 registradas. - 0 En el estado de emergencia de incendio, el proceso de apertura de la puerta se puede completar sólo Abrir la puerta Bit14 manteniendo pulsado el botón de apertura de puerta automática en el piso de emergencia de incendio Código de función F6-45 0 puerta hasta que se alcance el límite de apertura de la puerta. De lo contrario, se cambiará a la apertura de puerta automáticamente. Apertura de puerta Bit15 manteniendo pulsado el botón de apertura de La puerta se abre automáticamente después de que el ascensor llegue al piso de emergencia de 0 incendio. Rango de Nombre del parámetro ajuste Selección de función de Defecto Unidad 0 - 0–65535 evacuación de emergencia Propied ad ★ Se utiliza para seleccionar las funciones relacionadas con la evacuación de emergencia. "1" indica que la función está activada, y "0" indica que la función está desactivada. Las funciones definidas por los bits binarios se describen en la siguiente tabla. Tabla 7-11 Funciones de evacuación de emergencia indicadas por los bits de F6-45 F6-45 Selección de función de evacuación de emergencia Bit Bit0 Función Modo determinar Defect Descripción de la 0 Cálculo automático de dirección (Modo 0 Determinación de dirección de o 1 Dirección del piso de 0 Bit1 dirección 0 de sin carga) 1 carga (Modo de con carga) 0 aterrizaje más cercano 0 Parar en piso Durante el funcionamiento de evacuación de , el ascensor llega al de piso de aparcamiento de evacuación establecido en F6-49 (debe aparcamiento ser un valor distinto de cero y es un piso de servicio). De lo de evacuación contrario, el ascensor se detiene en el piso más cercano Reservado - Compensación El arranque de célula sin carga sigue siendo válido en el proceso en el arranque de funcionamiento de evacuación. Bit5 Reservado - 0 Bit6 Reservado - 0 Bit7 Reservado - 0 Protección de Si el ascensor no llega al piso requerido después de 50s de tiempo de funcionamiento de evacuación de emergencia, Err33 se informa. funcionamient En este caso, la función de conmutación de modo de frenado de o de cortocircuito de estator a accionamiento del controlador basado en evacuación el ajuste del tiempo no se puede realizar Reservado - Bit2 Bit3 Bit4 Bit8 Bit9 Salida del Bit10 zumbador de emergencia Bit11 Reservado 0 0 0 0 0 El zumbador pía a intervalos en el estado de funcionamiento de evacuación de emergencia. - 0 0 Modo de frenado de cortocircuito Bit12 de estator conmutado a Se habilita la función de conmutación de modo de frenado de cortocircuito de estator a accionamiento del controlador 0 accionamiento del controlador Ajuste del tiempo Modo de conmutación de modo de Bit13 Si el tiempo del modo de frenado de cortocircuito excede 0 Si el tiempo de modo de frenado de cortocircuito de estator frenado de excede 50s, el controlador comienza a accionar el ascensor, cortocircuito 1 del controlador Modo de Bit14 salida de Si la velocidad es todavía menor que el valor de F6-48 después de 10s en el modo de frenado de cortocircuito del estator, el controlador comienza a accionar el ascensor. El sistema sale de evacuación de emergencia cuando recibe 0 la señal de límite de apertura de la puerta del ascensor que llega al piso objetivo. evacuación de emergencia 0 Ajuste de la velocidad de estator a accionamiento estator 50, el controlador comienza a conducir el ascensor. 1 El sistema sale de evacuación de emergencia cuando recibe la señal de límite de cierre de puerta del ascensor que llega 0 al piso objetivo. Selección de función de Bit15 modo de Se habilita la función. Cuando esta función está activada, el ajuste frenado de de los códigos de función relacionados entra en vigencia. 0 cortocircuito de estator Código de Rango de Nombre del parámetro función ajuste Selección de función de F6-46 Defecto 0–65535 VIP Unidad - 0 Propied ad ★ Se utiliza para seleccionar la función de VIP del ascensor. "1" indica que la función está activada, y "0" indica que la función está desactivada Las funciones definidas por los bits binarios se describen en la siguiente tabla. Tabla 7-12 Funciones de VIP indicadas por los bits de F6-46 F6-46 Selección de función de VIP Bit Function VIP habilitada por Bit0 llamada de piso (piso at VIP ) Bit1 VIP habilitado por el terminal Bit2-Bit7 Bit8 Description Default Después de que esta función esté activada, el sistema entra en el funcionamiento de VIP. Después de que el terminal de entrada de VIP se convierte en ON, el sistema entra en funcionamiento 0 - Límite de número de Si se activa esta función, sólo una llamada de cabina llamadas de coche de se puede seleccionar de forma simultánea en el VIP estado de VIP. función F6-47 0 de VIP. Reservado Código de 0 Nombre del parámetro Tiempo de antelación de parpadeo Rango de ajuste 0.0–15.0 0 Defecto Unidad 0 s Propied ad ☆ Se utiliza para ajustar el tiempo de antelación de parpadeo cuando el ascensor llega al piso requerido por la llamada de cabina. Código de función F6-48 Nombre del parámetro Velocidad de conmutación de evacuación de Rango de ajuste 0.010–0.630 Defecto Unidad 0.010 m/s Propied ad ★ emergencia Se utiliza para ajustar la velocidad de conmutación de modo de frenado de cortocircuito de estator a accionamiento del controlador a través ajuste de velocidad. Código de función F6-49 Nombre del parámetro Piso de aparcamiento de evacuación Rango de ajuste 0 a F6-01 Defecto Unidad 0 s Propied ad ★ Se utiliza para establecer el piso de aparcamiento de evacuación cuando Bit2 (Parar en el piso de aparcamiento de evacuación) en F6-45 está habilitado. Goupo F7: Parámetros de función de prueba Este grupo de parámetros es especializado para la puesta en servicio del ascensor. Siga las instrucciones para la la puesta en servicio a velocidad normal: 1. Antes de la puesta en servicio, asegúrese de que el ducto no está obstruido y los parámetros relacionados se han establecido correctamente. 2. Haga que el ascensor marche al piso medio del ducto a la velocidad de inspección con el fin de prevenir dirección de marcha mal. 3. Realice la puesta en servicio de mando un solo piso y luego realice puesta en servicio de mandos de multi-pisos. Código de función F7-00 Nombre del parámetro Piso de llamada de cabina Rango de ajuste Defecto Unidad Piso de llamada hacia 0 0 a F6-00 0 0 a F6-00 0 ☆ ☆ arriba registrado F7-02 Piso de llamada hacia ad 0 a F6-00 registrado F7-01 Propied ☆ abajo registrado Estos parámetros se utilizan para ajustar los pisos de destino en la puesta en servicio o reparación del ascensor . Pueden ser utilizados respectivamente como el botón de llamada de cabina, botón de llamada de piso de subir y botón de llamada de piso de bajar. Ellos siguen siendo válidos después de que el mando de puerta en servicio sea de entrada, y se convierte en inválido hasta que se establecen en 0 o el sistema sufre fallo de energía. Código de función F7-03 Nombre del parámetro Veces de funcionamiento aleatorio Rango de ajuste 0–60000 Defecto Unidad 0 Se utiliza para ajustar las veces de funcionamiento aleatorio del sistema. - Propied ad ☆ El NICE3000new tiene la función de funcionamiento aleatorio automático. Si el ajuste de F7-03 es mayor que 60.000, el sistema mantiene realizando el funcionamiento aleatorio automático hasta que usted establece F7-03 en 0. Puede configurar el intervalo de tiempo entre dos veces de funcionamiento aleatorio en F7-08. Código de Nombre del función parámetro F7-04 Llamada de Rango de ajuste piso 0: Sí 1: No habilitada Defecto Unidad 0 - Propied ad ☆ Se utiliza para activar la función de llamada de piso. 0: Sí (Llamada de piso permitida) 1: No (Llamada de piso prohibida) Código de Nombre del función parámetro F7-05 Rango de ajuste Apertura de puerta 0: Sí habilitada 1: No Defecto 0 Unida Propied d ad - ☆ Se utiliza para activar la función de apertura de puerta. 0: Sí (Apertura de puerta perimitida) 1: No (Apertura de puerta prohibida) Funcionamiento continuo del ascensor sin abrir la puerta acelera el sobrecalentamiento del módulo del controlador. Uso de largo tiempo de tal modo puede causar protección contra el sobrecalentamiento, y por lo tanto, utilice la función con precaución. Código de Nombre del función parámetro F7-06 Función Rango de ajuste de sobrecarga Defect Uni Propied o dad ad 0 - ☆ 0: Desactivado 1: Activado Se utiliza para activar la función de sobrecarga. Esta función sólo se utiliza en la prueba de carga pesada. Una vez finalizada la prueba, prohiba el funcionamiento de sobrecarga inmediatamente. Código de Nombre del función parámetro F7-07 Interruptor de límite Rango de ajuste Defecto 0: Activado 0 Unid Propied ad ad - ☆ 1: Desactivado Se utiliza para activar la función de interruptor de límite. El interruptor de límite está desactivado sólo en la prueba del fin de carrera. Utilice la función con precaución. Código de función F7-08 Rango de Nombre del parámetro Intervalo de tiempo ajuste de Defecto Propied ad ad s ☆ 0 0–1000 funcionamiento aleatorio Unid Se utiliza para establecer el intervalo de tiempo entre dos veces de funcionamiento aleatorio. Group F8: Enhanced Function Parameters Código de Nombre del parámetro función F8-00 Auto-ajuste para célula de carga Rango de ajuste 0–100 Defecto Unidad 0 % Propied ad ★ Se usa para ajustar la carga para auto-ajuste de célula de carga. Para realizar el auto-ajuste de célula de carga, haga lo siguiente: 1. Asegúrese de que F8-01 se establece en 0 y F5-36 se establece en 2 ó 3 para que el sistema permite el auto-ajuste de célula de carga. 2. Detenga el ascensor en cualquier piso, con el coche en el estado sin carga. Establezca F8-00 en 0 y pulse la tecla ENTER Ponga N% de carga en el coche. A continuación, establezca F8-00 en N y pulse la tecla ENTER. Por ejemplo, si usted pone 500 kg de carga en el ascensor con carga nominal de 1.000 kg, ajuste F8-00 en 50. Una vez completado el autoajuste de célula de carga, los datos correspondientes de sin carga y de plena carga serán registrados en F8-06 y F8-07. También puede introducir manualmente los datos de acuerdo con la situación real. Código de función F8-01 Nombre del parámetro Selección de pre-par Rango de ajuste Defecto 0–2 0 Unid Propied ad ad - ★ Se utiliza para establecer el modo de compensación de pre-par en el arranque del ascensor. Los valores son los siguientes: 0: Pre-par inválido Se permite el auto-ajuste de célula de carga 1: Compensación de pre-par de célula de carga Con una célula de carga, el sistema realiza la función de compensación de pre-par. 2: Compensación automática de pre-par El sistema ajusta automáticamente el par compensado en el arranque sin una célula de carga. Si F8-01 se establece en 1, el sistema emite por adelantado el par a juego de la carga para asegurar la comodidad de marcha en el arranque. El par de salida está limitado por F2-08 (límite máximo de par). Cuando el par de carga es mayor que el límite máximo ajustado de par, el par de salida del sistema es el límite máximo de par. Código de función F8-02 Nombre del parámetro Rango de ajuste Defecto Desplazamiento de pre-par 0.0–100.0 50.0 Unid Propied ad ad % ★ Se utiliza para establecer el desplazamiento de pre-par. En realidad, es el coeficiente de equilibrio del ascensor, que indica el porcentaje de la carga de cabina a la carga nominal cuando el contrapeso y el peso del coche se equilibran. Código de función F8-03 F8-04 Nombre del parámetro Ganancia de accionamiento Ganancia de freno Rango de ajuste Defecto 0.00–2.00 0.60 0.00–2.00 0.60 Unid Propied ad ad - ★ ★ Estos dos parámetros se utilizan para ajustar la ganancia de pre-par cuando el ascensor funciona en el lado de accionamiento o el lado del freno. Para más detalles, véase la sección 5.1.5. Código de función F8-05 Nombre del parámetro Rango de ajuste Defecto Carga de cabina actual 0–1023 0 Unid Propied ad ad - ● Este parámetro sólo se puede leer y refleja la situación de carga en el coche. El valor se toma de muestra por el NICE3000new mediante el uso de una célula de carga. Este parámetro se utiliza para juzgar sobrecarga o carga plena, o calcular la corriente de par para la compensación de pre-par de célula de carga. Código de función F8-06 F8-07 Nombre del parámetro Rango de ajuste Defecto 0–1023 0 0–1023 100 Ajuste de sin carga de coche Ajuste de plena carga de coche Unid Propied ad ad - ★ ★ Estos dos parámetros especifican respectivamente las condiciones de sin carga y a plena carga de coche. Son valores de muestreo de AD. Si F8-06 = F8-07, la plena carga y la sobrecarga son válidas. Código de función F8-08 Nombre del parámetro Rango de ajuste Función de anti-molestia 0, 1, 2, 4 Defecto Unid Propied ad ad - ☆ 0 Se trata de los criterios para juzgar si existe molestia. Los valores son los siguientes: 0: Función de anti-molestia deshabilitada 1: Molestia juzgada por la célula de carga Es necesaria una célula de carga. El sistema juzga si existe molestia mediante la comparación de los datos de la célula de carga y el número de llamadas de cabina. 2: Molestia juzgada por cortina de luz El sistema determina que existe molestia cuando la cortina de luz no actúa después de que el ascensor pare en llegada por tres veces consecutivas. 4: Molestia juzgada por la señal de carga ligera Si la señal de carga ligera está activa, el sistema determina que existe molestia cuando el número de llamadas de cabina es mayor que un cierto valor. Cuando el sistema determina que el ascensor está en el estado de molestia, entonces cancela todas las llamadas de cabina. En este caso, llamadas de cabina necesitan ser registradas de nuevo. Código de Nombre del parámetro función Rango de Defect Unid Propied ajuste o ad ad 0.000 ~ F3-11 0.050 m/s ★ Velocidad de la operación de F8-09 evacuación de emergencia en caso de corte de energía Se utiliza para ajustar la velocidad de operación de evacuación de emergencia en caso de corte de energía. Código de función Nombre del parámetro Rango de Defect Unid Propied ajuste o ad ad 0–2 1 - ★ Modo de operación de F8-10 evacuación de emergencia en caso de corte de energía Se utiliza para establecer el modo de operación de evacuación de emergencia en caso de corte de energía. 0: Inválido 1: UPS 2: Fuente de alimentación de batería de 48 V Para más detalles, véase la sección 5.2.1. Código de función Nombre del parámetro Rango de ajuste Defecto Unid Propied ad ad s Tiempo de retención de F8-11 velocidad cero desde 0.200 ~ 1.500 0.200 ★ apertura del freno Se utiliza para ajustar el tiempo desde el momento en que el sistema envía el mando de aplicación del freno hasta el momento en que el freno está completamente aplicado. Para más detalles, vea la Figura 7-3. Código de función F8-12 Nombre del parámetro Rango de ajuste Defecto 0 a F6-00 0 Piso de emergencia de incendio 2 Unid Propied ad ad - ★ Se utiliza para establecer el segundo piso de emergencia de incendio. La conmutación entre el piso de emergencia de incendio 1 y el piso de emergencia de incendio 2 se lleva a cabo por medio de entrada del MCB. Cuando esta señal se emite, el ascensor entra en el estado de emergencia de incendio y vuelve a este piso. Código de función Nombre del parámetro Rango de ajuste Defecto Unidad 0 - Propieda d Dirección de inicio de F8-16 mando auxiliar de 0–40 ☆ llamada de piso Se utiliza para ajustar la dirección de inicio de mando auxiliar de llamada de piso de la puerta trasera. Dirección de una llamada de piso de la puerta trasera = Dirección de una llamada de piso de la puerta delantera en el mismo piso + F8-16 Código de función F8-17 Nombre del parámetro Rango de ajuste Defecto 0–1 0 Verificación de dirección de llamada de piso Unid Propied ad ad ☆ Si es válido, el HCB ya no muestra la información del piso actual del coche, pero muestra la dirección ajustada de sí mismo, conveniente para la inspección en el caso de configuración equivocada de dirección de piso. Group F9: Parámetros de tiempo Código de función F9-00 Nombre del parámetro Tiempo de inactividad antes de volver al piso de Rango de ajuste 0–240 Defecto Unidad 10 min Propieda d ☆ base Se utiliza para ajustar el tiempo de inactividad del ascensor antes de volver al piso de base. Cuando el tiempo de inactividad del ascensor supera el ajuste de este parámetro, el ascensor vuelve al piso de base. Si este parámetro se establece en 0, se convierte inválido. Código de Nombre del parámetro función Rango de ajuste Defecto Unidad 2 min Propieda d Tiempo para que el F9-01 ventilador y la lámpara se 0–240 ☆ apaguen Se utiliza para ajustar el tiempo que el ventilador y la lámpara permanecen encendidos antes de apagarse automáticamente. Si no hay un mando de funcionamiento en el estado de funcionamiento automático, el sistema apaga el ventilador y la lámpara automáticamente después del tiempo ajustado en este parámetro. Si este parámetro se establece en 0, se convierte inválido. Código de función F9-02 Nombre del parámetro Límite de tiempo de funcionamiento del motor Rango de ajuste 0–45 Defecto Unidad s 45 Propieda d ★ Se utiliza para establecer el límite de tiempo de funcionamiento del motor. En el estado de funcionamiento normal, si el tiempo de funcionamiento continuo en la misma dirección entre dos pisos adyacentes excede el ajuste de este parámetro pero no se recibe ninguna señal de nivelación, el sistema realizará la protección. Este parámetro se utiliza principalmente para la protección de sobre-tiempo en el caso de deslizamiento de cable de acero en la polea de tracción. Si este parámetro se establece en un valor menor que 3s, se convierte inválido. Código de función Nombre del parámetro Rango de ajuste Propieda Defecto Unidad YYYY ☆ d F9-03 Reloj: año 2000–2100 Año acual F9-04 Reloj: mes 1–12 Mes actual MM ☆ F9-05 Reloj: día 1–31 Día actual DD ☆ F9-06 Reloj: hora 0–23 Hora actual HH ☆ F9-07 Reloj: minuto 0–59 Minuto acutal MM Estos parámetros se utilizan para ajustar la fecha y la hora actual del sistema. ☆ Cuenta de tiempo se admite en la falla de energía. Es necesario configurar la hora actual del sistema correctamente para que las funciones relacionadas con el tiempo se pueden implementar. Código de función F9-09 F9-11 F9-12 Rango de Nombre del parámetro Unidad 0–65535 0 h ● 0–9999 0 - ● 0–9999 0 - ● ajuste Tiempo acumulativo de funcionamiento Byte alto de las veces de funcionamiento Byte bajo de las veces de funcionamiento Propieda Defecto d Estos parámetros se utilizan para ver el tiempo acumulativo y las veces reales de funcionamiento del ascensor. Veces de funcionamiento del ascensor= F9-11 x 10000 + F9-12. Código de función F9-13 Nombre del parámetro Rango de ajuste Defecto Unidad 0 ~ 99 0 Día Detección de días de mantenimiento Propieda d ★ Este parámetro es para la función de recordación de cuidado forzado. Si el valor de F9-13 no es 0, la función de detección de mantenimiento se convierte válida, y el sistema de controlador empieza a contar días. Si en el proceso de cuenta de tiempo no se ha llevado la operación de cortar la energía, cuando se cumple el número de días ajustado en F9-13, el ascensor entra en estado parado y luego informa el Err08, recordando el mantenimiento de manera forzada, mientras el ascensor no fuede funcionar. En este tiempo es necesario cortar la energía y entrar en el estado de inspección por una vez, y así se puede borrar el número antiguo y empezar a contar días de nuevo . Si F9-13 se establece en 0, esta función se convierte inválida. Grupo FA: Parámetros de ajuste del teclado Código de función FA-00 Nombre del parámetro Selección de indicador del teclado Rango de ajuste 0–3 Defecto Unidad 3 - Propieda d ☆ El sistema NICE3000new tiene tres botones y tres LEDs de 7-segmentos en el MCB. Usted puede cambiar el contenido de la pantalla a través de la configuración de este parámetro. 0: Manifestación invertida de piso físico 1: Manifestación positiva de piso físico 2: Manifestación invertida de piso de llamada de piso 3: Manifestación positiva de piso de llamada de piso Código de Nombre del parámetro función Pantalla en estado de FA-01 funcionamiento Rango de ajuste 1–65535 Defecto Unidad 65535 - Propieda d ☆ Se utiliza para establecer los parámetros de funcionamiento que aparecen en el teclado cuando el ascensor está en estado de funcionamiento. Un total de 16 parámetros de funcionamiento se puede mostrar durante el funcionamiento, cada uno respectivamente corresponde a los 16 bits binarios de FA-01. "1" indica que el parámetro se muestra, mientras que "0" indica que el parámetro no se muestra. Puede cambiar entre los parámetros para que se muestre pulsando el botón de cambio y establecer si se muestra este parámetro de acuerdo a su propio hábito de usar. Los 16 bits binarios correspondientes a los parámetros de funcionamiento se indican en la siguiente tabla. Tabla 7-13 Parámetros de funcionamiento correspondientes a 16 bits de FA-01 Bit Bit0 Parameter Name Velocidad de Default 1 funcionamiento Bit Parameter Name Bit8 Terminal de salida Default 1 Bit1 Velocidad nominal 1 Bit9 Piso actual 1 Bit2 Tensión del bus 1 Bit10 Posición actual 1 Bit3 Tensión de salida 1 Bit11 Carga de cabina 1 Bit4 Corriente de salida Estado de entrada de 1 Bit5 Frecuencia de salida Bit6 Bit7 Bits bajos de 1 1 1 terminales de entrada Bits altos de terminales 1 de entrada Código de función FA-02 Nombre del parámetro Pantalla en estado de parada Bit12 Bit13 CTB Estado de salida de 1 Bit14 Estado del sistema Bit15 Corriente de pre-par Rango de ajuste 1–65535 1 CTB Defecto Unidad 65535 - 1 Propieda d ☆ Se utiliza para establecer los parámetros que aparecen en el teclado cuando el ascensor está en el estado de parada. Un total de 16 parámetros se puede mostrar en la parada. El uso es el mismo que el de FA-01. Los 16 bits binarios correspondientes a los parámetros de parada se enumeran en la tabla siguiente. Table 7-14 Parámetros de parada correspondientes a 16 bits de FA-02 Bit Parameter Name Bit 1 Velocidad de Bit0 Default Distancia Bit8 funcionamiento Bit1 Bits bajos de terminales 1 Bit9 1 Bit10 de entrada Bits altos de terminales Bit3 desaceleración Default de 1 a velocidad nominal Tensión del bus Bit2 Parameter Name 1 de entrada Estado de entrada de 1 CTB Estado de salida de 1 CTB Bit11 Estado del sistema 1 Bit4 Terminal de salida 1 Bit12 Reservado 0 Bit5 Piso actual 1 Bit13 Reservado 0 Bit6 Posición actual 1 Bit14 Reservado 0 Bit7 Carga de cabina 1 Bit15 Reservado 0 Los parámetros de funcionamiento y de parada del sistema de NICE3000new son las referencias importantes para los ingenieros a realizar la puesta en servicio en el sitio. Los parámetros se describen de la siguiente manera .: 1) Velocidad de funcionamiento: indica la velocidad real de funcionamiento del ascensor. Su valor máximo es F0-03 (Velocidad máxima de funcionamiento), en unidad de m / s. 2) Velocidad ajustada: indica la velocidad establecida del sistema NICE3000new durante el funcionamiento del ascensor. Es la velocidad de funcionamiento calculada por el sistema teóricamente a la que el ascensor debe funcionar. Su unidad es m / s ... 3) Tensión del bus: indica la tensión de DC del sistema de NICE3000new , en unidad de m / s. 4) Tensión de salida: indica el valor efectivo de la tensión equivalente de la salida de onda de PWM por el sistema NICE3000new , en unidad de V. 5) Corriente de salida: indica el valor eficaz de la corriente actual cuando el sistema NICE3000new acciona el motor para funcionar, en unidad de A. 6) Frecuencia de salida: indica la frecuencia actual del motor durante el funcionamiento. Tiene una relación fija correspondiente con la velocidad de funcionamiento. La unidad es Hz . 7) Bits bajos de terminal de entrada: indican el significado de los terminales de entrada por bit. "1" indica que la señal está activa . Un total de 16 bits se definen de la siguiente manera: Bit BIT0 Significado Reservado Bit BIT8 Significado Señal de inspección BIT1 BIT2 BIT3 BIT4 BIT5 BIT6 BIT7 1) Señal de nivelación arriba Señal de nivelación abajo BIT10 Señal de zona de puerta Retroalimentación BIT11 de circuito de seguridad 1 Realimentación del circuito de bloqueo de puerta 1 Retroalimentación de contactor de RUN Retroalimentación BIT9 de contactor de freno 1 BIT12 BIT13 BIT14 BIT15 Inspección de señal de hacia arriba Inspección de señal de hacia abajo Señal de emergencia de incendio Señal de límite arriba Señal de límite abajo Señal de sobrecarga Señal de plena carga Bits altos de terminal de entrada : indican el significado de los terminales de entrada por bit. "1" indica que la señal está activa. Un total de 16 bits se definen de la siguiente manera: Bit BIT0 BIT1 BIT2 BIT3 BIT4 BIT5 Significado Bit Señal de desaceleración de arriba 1 Señal de desaceleración de abajo 1 Señal de desaceleración de arriba 2 Señal de desaceleración de abajo 2 Señal de desaceleración de arriba 3 Señal de desaceleración de abajo 3 BIT8 BIT9 BIT10 BIT11 BIT12 BIT13 Retroalimentación de salida BIT6 de contactor de cortocircuito de circuito de bloqueo de Significafo Cortina de luz de máquina de puerta 1 Cortina de luz de máquina de puerta 2 Retroalimentación de salida de freno 2 Entrada del UPS Entrada de bloqueo de ascensor Retroalimentación de circuito de seguridad 2 Retroalimentación del motor BIT14 síncrono auto-bloqueado puerta BIT7 Señal de sobrecalentamiento del Retroalimentación de circuito BIT15 de bloqueo de puerta 2 motor 2) Terminal de salida : Indica el significado de los terminales de salida por bit. "1" indica que la señal está activa. Un total de 16 bits se definen de la siguiente manera: Bit BIT0 Significafo Reservado Bit BIT8 Significado Cierre de máquina de puerta 2 BIT1 Salida de contactor de RUN BIT9 Contactor normal BIT2 Salida de contactor de freno BIT10 Estado de fallo BIT3 BIT4 circuito de bloqueo de puerta Señal de llegada de piso de emergencia de incendio BIT11 BIT12 Sistema en BIT13 Reservado BIT6 Cierre de máquina de puerta 1 BIT14 Reservado BIT15 de Reservado Apertura de máquina de puerta 1 Apertura de máquina de puerta 2 estado funcionamiento BIT5 BIT7 3) Salida de contactor de cortocircuito de Salida del zumbador de nivelación de emergencia Piso actual : Indica la información del piso físico donde se encuentra el ascensor. Es el mismo que el valor de F4-01. 4) Posición actual: indica la distancia absoluta de la cabina del ascensor actual a la placa de nivelación de el primer piso, en unidad de m. 5) Carga del coche: indica el porcentaje de la carga de la cabina a la carga nominal juzgado por el sistema NICE3000new basado en datos del sensor, en unidad de%. 6) Estado de entrada de CTB : indica el significado de las entradas de CTB por bit. "1" indica que la señal está activa . Un total de 16 bits se definen de la siguiente manera: Bit Bit Significado BIT0 Cortina de luz 1 BIT8 Botón de abrir la puerta BIT1 Cortina de luz 2 BIT9 Botón de cerrar la puerta BIT2 BIT3 Límite de apertura de puerta 1 Límite de apertura de puerta 2 BIT10 BIT11 Botón de retardo de apertura de puerta Señal de funcionamiento de viaje directo BIT4 Límite de cierre de puerta 1 BIT12 señal de operador BIT5 Límite de cierre de puerta 2 BIT13 Señal de cambio de dirección BIT6 BIT7 7) Significado Señal de plena carga Señal de sobrecarga BIT14 BIT15 Señal de funcionamiento independiente Señal de funcionamiento de bombero Estado de salida de CTB : Indica el significado de las salidas de CTB por bit. "1" indica que la señal está activa. Un total de 16 bits se definen de la siguiente manera: Bit BIT0 BIT1 Significado Salida de apertura de puerta 1 Salida de cierre de puerta 1 Bit BIT8 BIT9 Significado Manifestación de botón de apertura de puerta Manifestación de botón de cierre de puerta Señal de bloqueo de puerta BIT2 Salida de apertura de puerta BIT3 2 BIT11 Manifestación de botón de retardo de apertura de puerta Parada de zona sin puerta BIT4 Salida de cierre de puerta 2 BIT12 Reservado BIT5 Señal de bloqueo de puerta BIT13 Salida de zumbador Señal de gong de llegada BIT6 arriba Señal de gong de llegada BIT7 8) BIT10 abajo BIT14 BIT15 Reservado Señal de ahorro de energía Estado del sistema: indica que el estado del sistema por bit. "1" indica que la señal está activa. Un total de 16 bits se definen de la siguiente manera: Bit Significado Bit Significado BIT0 Estado de cortina de luz 1 BIT8 Estado del coche: BIT1 Estado de cortina de luz 2 BIT9 1:Puerta abierta BIT2 BIT3 Bloqueo de ascensor de sala (indicado en HCB) Emergencia de incendio de sala (indicado en HCB) BIT10 BIT11 2: Retención de puerta abierta 3: Puerta cerrada 4: Límite de cierre de puerta 5: Funcionando BIT4 Estado de ascensor: BIT12 Plena carda BIT5 0: Inspección BIT13 Sobrecarga BIT6 1: Auto-ajuste de ducto BIT14 Recervado BIT15 Reservado 3: Regreso a piso de base en emergencia de incendio BIT7 4: Operación de bombero 6: Operación de operador 7: Automático (normal) 9) Corriente de pre-par: indica el porcentaje de la corriente de pre-par compensada por el sistema NICE3000new en el arranque a la corriente nominal, en la unidad de%. Código de función FA-03 Nombre del parámetro Ángulo actual de encoder Rango de ajuste 0.0–359.9 Defecto 0.0 Unidad Degree (°) Propieda d ● Muestra el ángulo de encoder en tiempo real. Este parámetro no se puede modificar. Código de función FA-05 FA-06 Nombre del parámetro Software del tablero de control Software de tablero de Rango de Propieda Defecto Unidad 0–65535 0 - ● 0–65535 0 - ● ajuste d accionamiento Estos dos parámetros, respectivamente, muestran el número de versión del programa del tablero de control de lógica y el tablero de control de conductor. Código de función FA-07 Nombre del parámetro Rango de ajuste Temperatura del disipador 0–100 de calor Defecto Unidad 0 C Propieda d ● Muestra la temperatura actual del disipador de calor. Normalmente, la temperatura del disipador de calor está por debajo de 40C. Cuando la temperatura del disipador de calor es demasiado alta, el sistema reduce la frecuencia portadora automáticamente para reducir la disipación de calor. Cuando la temperatura del disipador de calor se eleva a un cierto valor, el sistema informa un fallo de sobrecalentamiento del módulo y deja de funcionar. Código de función FA-11 Nombre del parámetro Corriente de pre-par Rango de ajuste 0.0–200.0 Defecto Unidad 0 % Propieda d ● Muestra el porcentaje de la corriente de pre-par a la corriente nominal (visualización positiva / negativa, lo que indica el estao eléctrico o de generar electricidad). Código de función FA-12 Nombre del parámetro Información lógica Rango de ajuste 0–65535 Defecto Unidad 0 - Propieda d ● Muestra los parámetros de estado del ascensor. Los LEDs están dispuestos como 5, 4, 3, 2, 1 de izquierda a derecha. LED 1 muestra el estado de la puerta 1. LEDs 2 y 3 no tienen mostración. LEDs 4 y 5 juntos muestran el estado del ascensor. Figura 7-7 Visualización del estado de ascensor Los LEDs se definen en la siguiente tabla. Tabla 7-15 Visualización de LED del estado del ascensor LED 5 LED 4 Estado de ascensor LED 3 LED 2 LED 1 No tiene mostraci ón No tiene mostraci ón Estado de puerta 1 Estado de inspección Autoajuste de ducto 00 01 02 8 09 Micro-nivelación 10 Regreso a piso de base en emergencia de incendio Operación de bombero 03 04 05 Estado de fallo 07 Código de 12 13 Estado de operador Funcionamiento automático 06 11 14 15 Bloqueo de ascensor Aparcamiento de ascensor inactivo Re-nivelación a la velocidad de inspección Operación de evacuación de emergencia - Autoajuste de motor Control del teclado Verificación de piso de base Estado de VIP Rango de Nombre del parámetro función FA-13 - Información de curva ajuste 0 Estado de espera 1 Estado de puerta abierta 2 Límite de aperrtura de puerta 3 Estado de puerta cerrada 4 Límite de cierre de puerta - - - - - - Defecto Unidad 0 - 0–65535 Propieda d ● Se muestra la información de curva de funcionamiento del sistema. LED 5, 4 y 3 no tienen visualización, mientras que los LED 2 y 1 muestran la información de curva de funcionamiento. LED 5 LED 4 LED 3 No tiene mostra ción No tiene mostraci ón No tiene mostraci ón LED 2 Información de curva 00 01 02 03 - - - 04 05 06 07 08 Código de LED 1 Estado de espera 09 Segmento de inicio a velocidad cero Segmento de retención de velocidad cero 10 11 Reservado 12 Fase de velocidad de arranque Segmento de inicio de aceleración 13 Segmento de aceleración lineal Segmento extremo de aceleración Segmento de funcionamiento a velocidad estable Nombre del parámetro Rango de Segmento de inicio de desaceleración Segmento de deceleración Lineal Segmento extremo de deceleración Velocidad cero en parada Fase de parada de corriente 14 Reservado 15 Parada de procesamiento de datos 16-20 Fase de autoajuste 21 Operación de emergencia Defecto Unidad Propied función FA-14 ajuste Velocidad ajustada Retroalimentación de FA-15 velocidad ad 0.000–4.000 0 m/s ● 0.000–4.000 0 m/s ● FA-16 Tensión del bus 0–999.9 0 V ● FA-17 Posición actual 0.00–300.0 0 m ● FA-18 Corriente de salida 0.0–999.9 0 A ● FA-19 Frecuencia de salida 0.00–99.99 0 Hz ● FA-20 Corriente de par 0.0–999.9 0 A ● FA-21 Tensión de salida 0–999.9 0 V ● FA-22 Par de salida 0–100 0 % ● FA-23 Potencia de salida 0.00–99.99 0 kW ● Estos parámetros muestran los parámetros de estado actual del funcionamiento del sistema (el par de salida y la potencia de salida admiten visualización positiva / negativa). Código de función Rango de Nombre del parámetro ajuste Interferencia de FA-24 0–65535 comunicación Defecto Unidad 0 - Propied ad ● Muestra la calidad de la comunicación actual del sistema, como se describe en la siguiente tabla. Table 7-16 Muestra de calidad de comunicación LED 5 Calidad de comunicación de SPI 0 Bueno · · · · 9 Interrumpido LED 4 No tiene mostración LED 3 LED 2 LED 1 Calidad de Calidad de Calidad de comunicación de comunicación comunicación de CAN2 de Modbus CAN1 - 0 Bueno 0 Bueno 0 Bueno · · · · · · · · · · · · 9 Interrumpido 9 Interrumpid o 9 Interrumpid o 0-9 indica la calidad de la comunicación. Cuanto mayor sea el número, más grande es la interferencia que la comunicaciones sufre y más pobre es la calidad de la comunicación es. Código de función FA-26 Nombre del parámetro Estado de entrada 1 Rango de ajuste 0–65535 Defecto Unidad 0 - Propied ad ● FA-27 Estado de entrada 2 0–65535 0 - ● FA-28 Estado de entrada 3 0–65535 0 - ● FA-30 Estado de entrada 5 0–65535 0 - ● FA-31 Estado de salida 1 0–65535 0 - ● FA-32 Estado de salida 2 0–65535 0 - ● 0–65535 0 0–65535 0 FA-33 FA-34 - Estado de la entrada del coche ● - Estado de la salida del coche ● FA-35 Estado de sala 0–65535 0 - ● FA-36 Estado del sistema 1 0–65535 0 - ● FA-37 Estado del sistema 2 0–65535 0 - ● La siguiente figura muestra un ejemplo de los estados de entrada que se muestran. Figura 7-8 Ejemplo de muestra de estado de entrada Como se muestra en la figura anterior, los LEDs de derecha a izquierda están numerados 1, 2, 3, 4, y 5. Para FA-26 a FA-37, los LEDs 5 y 4 muestran el No. de función .; LED 3 muestra si la función es válida (1) o inválido (0); los 16 segmentos de LED 1 y 2 muestran los estados de las 16 funciones en este parámetro. De acuerdo con la figura, LEDs 5, 4 y 3 muestran que la función 10 (Inspección de abajo) es 1 (Válido); LEDs 1 y 2 muestran que, además de la función 10, funciones 4(retroalimentación de circuito de seguridad), 5 (retroalimentación del circuito de bloqueo de puerta), 6 (Retroalimentación de contactor de RUN), 7 (Retroalimentación del contactor de freno), y 8 (Señal de Inspección) son válidas. FA-26 Estado de entrada 1 No. 0 Función Reservado FA-28 Estado de entrada 3 No. Función 8 Señal inspección No. de 64 Función Reservado No. Función 72 Cambio de piso de emergencia de incendio 1 Señal de nivelación arriba 2 3 4 5 6 7 9 de Señal de nivelación abajo 10 Inspección abajo de Señal de zona de puerta 11 Señal emergencia incendio de de 67 12 Señal de límite 68 arriba Señal de terremoto 13 Retroalimentación de circuito de seguridad Retroalimentación de circuito de bloqueo de puerta Retroalimentación de contactor de RUN Retroalimentación de contactor de freno 73 Reservado 74 Reservado 75 Reservado 76 Reservado Señal de lñimite 69 abajo Puerta trasera 77 prohibida Reservado 14 Señal sobrecarga 70 Carga ligera 78 Reservado 15 Señal de plena 71 carga Media-carga 79 Reservado de FA-27 Estado de entrada 2 No. 16 17 18 19 Señal de borde de seguridad de puerta 1 Señal de borde de seguridad de puerta 2 Señal de sobrecalenta miento del motor Inspección arriba Función Señal desaceleración arriba 1 Señal desaceleración abajo 1 Señal desaceleración arriba 2 Señal desaceleración abajo 2 No. de 24 de 25 de 26 65 66 FA-30 Estado de entrada 5 Función No. Cortina de luz de máquina de 0 puerta 1 Cortina de luz de máquina de 1 puerta 2 Retroalimentació n de contactor de 2 freno 2 Functión No. Función Reservado 8 Reservado Reservado 9 Reservado Reservado 10 Reservado Reservado 11 Reservado de 27 Entrada de UPS 3 de de 4 Señal de circuito de 12 seguridad de alta-tensión Señal de circuito de bloqueo de 13 puerta de alta-tensión 20 Señal de desaceleración 28 arriba 3 çEntrada bloqueo ascensor 21 Señal de desaceleración 29 abajo 2 Señal de circuito 5 de seguridad 2 22 Retroalimentación de contactor de cortocircuito de 30 circuito de bloqueo de puerta Retroalimentació n de contactor de 6 cortocircuito de estator de motor Reservado 14 Reservado 23 Señal de funcionamiento de 31 bombero Retroalimentació n de circuito de 7 bloqueo de puerta 2 Reservado 15 Reservado Reservado Reservado FA-31 Estado de salida 1 FA-32 Estado de salida 2 No. Función No. Función No. 0 Reservado 8 Cierre de puerta 16 2 1 Salida de contactor 9 de RUN Contactores de freno y de RUN 17 normales 2 Salida de 10 contactoe freno Estado de fallo por encima del 18 nivel 3 Arranque de alto voltaje de 24 freno Funcionamien to de sscensor en 25 dirección hacia arriba Salida de lámpara / 26 ventilador 3 Salida de contactor de cortocircuito de 11 circuito de bloqueo de puerta Estado de 19 funcionamiento Esterilización médica 4 Llgada de piso de emergencia de 12 incendio 5 Apertura de puerta 13 1 6 Cierre de puerta 1 7 Apertura de puerta 15 2 Salida de contactor de cortocircuito de estator de motor Salida de emergencia de fallo de alimentación Sistema saludable Pío de nivelación de emergencia 14 FA-33 Estado de entrada del coche Función No. Función 0 Reservadi 8 Entrada sobrecarga 9 2 3 4 5 6 7 Cortina de luz puerta 1 Cortina de luz puerta 2 Límite de apertura puerta 1 Límite de apertura puerta 2 Límite de cierre puerta 1 Límite de cierre puerta 2 de de de de de de No. Función Reservado Reservado Reservado 27 Reservado Reservado 20 Parada zona puerta en sin 28 Salida bloqueo eléctrico de 21 29 Reservado 22 Estado de sin 30 servicio Reservado 23 Reservado Reservado 31 FA-34 Estado de salida del coche No. 1 Función No. Función No. Función 0 Reservado 8 Gong llegada abajo Entrada de 1 carga ligera Puerta 1 abierta 9 Reservado 10 Reservado 2 Puerta 1 cerrada 10 Reservado 11 Reservado 3 Cierre forzado de 11 puerta 1 Reservado 4 Puerta 2 abierta 12 5 Puerta 2 cerrada 13 Reservado Cierre forzado de 14 puerta 2 Gong de llegada 15 arriba Reservado 12 13 14 Entrada de plena carga 15 de Reservado Reservado Reservado 6 Reservado 7 Reservado Reservado FA-35 Estado de sala No. Función 0 Reservado 1 çSeñal bloquero No. Función 4 Señal de VIP de 5 de Señal seguridad de de No. Función No. Función 8 Reservado 12 Reservado 9 Reservado 13 Reservado ascensor Señal de emergencia de 6 incencio Piso actual 7 prohibido 2 3 Entrada de botón de cierre de 10 puerta Reservado 14 Reservado Reservado Reservado 15 Reservado FA-36 Estado de systema 1 FA-37 Estado de systema 2 No. Función 0 Botón de apertura 8 de puerta 1 Botón apertura puerta 2 1 Botón de cierre de 9 puerta 1 Botón de cierre 1 de puerta 2 Demora de apertura de puerta 1 Interruptor de viaje directo Interruptor de operador Interruptor de cambio de dirreción Interrptor de funcionamiento independiente Interriptor de emergencia de incendio 2 10 Demora apertura puerta 2 11 Reservado 3 12 Reservado 4 13 Reservado 14 15 2 3 4 5 6 7 No. 11 Función No. No. Función 8 Reservado 9 Reservado 10 Reservado 11 Reservado 12 Reservado 5 Media carga 13 de systema Reservado Reservado 6 Carga ligera 14 de systema Reservado Reservado 7 Reservado Reservado de de 0 de de 2 Función Muestra de dirección arriba Muestra de dirección arriba Estado de funcionamient o Plena carga de systema Sobrecarga de systema Código de Nombre del parámetro Rango de ajuste función FA-46 FA-47 FA-48 Estado de comunicación de llamada de piso 1 Estado de comunicación de llamada de piso 2 Estado de comunicación de llamada de piso 3 Defect o 15 Unidad Propieda d 0–65535 0 - ● 0–65535 0 - ● 0–65535 0 - ● Estos parámetros muestran el estado de la comunicación entre los HCB de todos los pisos y el MCB. FA-46, FA-47, y FA-48 indican, respectivamente, el estado de comunicación de pisos 1 a 16, 17 a 32, y 33 a 40. Como se muestra en la Figura 7-4, los LEDs 5 y 4 muestran la dirección de piso; LED 3 muestran si la comunicación para esta dirección de piso es normal (Se muestra "1") o se ve interrumpida (se muestra "0"). La calidad de la comunicación puede ser vista desde los LEDs 1 y 2: Los 16 segmentos muestran el estado de la comunicación de 16 direcciones de piso; ON indica que la comunicación es normal, y OFF indica que la comunicación se ve interrumpida. Grupo Fb: Parámetros de función de puerta Código de función Fb-00 Nombre del parámetro Rango de ajuste Número de máquina(s) 1–2 de la puerta Defect o 1 Unidad - Propieda d ★ Se utiliza para establecer el número de máquina (s) de la puerta. Establezca este parámetro según las condiciones reales. Código de función Fb-01 Nombre del parámetro Rango de ajuste Software de CTB 00–999 Defect o 0 Unidad - Propieda d ● Se muestra el software del CTB conectado al controlador. Código de Nombre del parámetro Rango de ajuste función Fb-02 Fb-03 Fb-18 Fb-04 Fb-05 Fb-19 Pisos de servicio 1 de máquina de puerta 1 Pisos de servicio 2 de máquina de puerta 1 Pisos de servicio 3 de máquina de puerta 1 Pisos de servicio 1 de máquina de puerta 2 Pisos de servicio 2 de máquina de puerta 2 Pisos de servicios 3 de máquina de puerta 2 Defect o Unidad Propieda d 0–65535 65535 - ☆ 0–65535 65535 - ☆ 0–65535 65535 - ☆ 0–65535 65535 - ☆ 0–65535 65535 - ☆ 0–65535 65535 - ☆ Estos parámetros se utilizan para ajustar los pisos de servicio de máquina de puerta 1 y de máquina de puerta 2. Pisos de Servicio 1 corresponden a los pisos 1-16; pisos de servicio 2 corresponden a los pisos 17 a 32; pisos de servicio 3 corresponden a los pisos 33 a 48. El método de ajuste es el mismo que para F6-05. Código de función Fb-06 Nombre del parámetro Tiempo de protección de apertura de puerta Rango de ajuste 5–99 Defect o 10 Unidad s Propieda d ☆ Se utiliza para establecer el tiempo de protección de la puerta abierta. Después de emitir el mando de abrir la puertala, si el sistema no recibe la señal de límite de apertura de la puerta después del tiempo ajustado en este parámetro, el sistema vuelve a abrir la puerta. Cuando las veces de apertura / cierre de puerta alcanzan el valor establecido en Fb-09, el sistema informa un fallo Err48. Código de Nombre del parámetro Rango de ajuste función Defect o Unidad Propieda d Demora de salida de gong Fb-07 de llegada 0–1000 0 ms ☆ Cuando el valor de este parámetro es mayor que 10 y el indicador del coche se conmuta al piso de destino, el sistema emite el gong de llegada después del tiempo ajustado en este parámetro. Si el valor es menor que 10, el sistema emite el gong de llegada en la parada. Código de función Fb-08 Nombre del parámetro Tiempo de protección de cierre de puerta Rango de ajuste 5–99 Defect o 15 Unidad s Propieda d ☆ Se utiliza para ajustar ell tiempo de protección de cierre de puerta Después de la emitir el mando de cierre de puerta, si el sistema no recibe la señal de cierre de puerta después del tiempo establecido en este parámetro, el sistema vuelve a cerrar la puerta. Cuando las veces de apertura / cierre de puerta alcanzan el valor establecido en Fb-09, el sistema informa un fallo de Err49. Código de función Fb-09 Nombre del parámetro Veces de re-apertura de puerta Rango de ajuste 0–20 Defect o 0 Unidad - Propieda d ☆ Se utiliza para ajustar las veces de re-apertura/ re-cierre permitidas cuando la apertura / cierre de puerta es anormal. Si este parámetro se establece en 0, indica que la re-apertura de puerta no se admite; en este caso, el ascensor sigue abriendo / cerrando la puerta si no recibe la señal de límite de apertura/ cierre de puerta. Código Nombre del de parámetro Rango de ajuste Defect o Unidad Propieda d función Fb-10 Estado de puerta del ascensor en espera 0–2 0 - ☆ Se utiliza para establecer el estado de puerta cuando el ascensor está en el estado de parada y en espera. Los valores son los siguientes: 0: Cerrar la puerta de forma normal en piso de base 1: Espera con la puerta abierta en piso de base 2: Espera con la puerta abierta en cada piso Código de función Nombre del parámetro Rango de ajuste Defect o Unidad Propieda d Tiempo de retención de Fb-11 puerta abierta para 1–1000 5 s ☆ llamada de piso Se utiliza para establecer el tiempo de retención de la puerta abierta cuando hay una llamada de piso. El ascensor cierra la puerta inmediatamente después de recibir un mando de cierre de puerta. Código de función Nombre del parámetro Rango de ajuste Defect o Unidad Propieda d Tiempo de retención de Fb-12 apertura de puerta para 1–1000 3 s ☆ llamada de coche Se utiliza para establecer el tiempo de retención de la puerta abierta cuando hay una llamada de cabina. El ascensor cierra la puerta inmediatamente después de recibir un mando de cierrar puerta. Código de función Nombre del parámetro Rango de ajuste Defect o Unidad Propieda d Tiempo de retención de Fb-13 puerta abierta en piso 1–1000 10 s ☆ de base Se utiliza para establecer el tiempo de retención de puerta abierta después de que el ascensor llegue al piso de base. El ascensor cierra la puerta inmediatamente después de recibir un mando de cierre de puerta. Código de función Nombre del parámetro Rango de ajuste Defect o Unidad Propieda d Fb-14 Demora de apertura de puerta 10–1000 30 s ☆ Se utiliza para ajustar el tiempo de retención de puerta abierta cuando hay entrada de demora de apertura de puerta. El ascensor cierra la puerta inmediatamente después de recibir un mando de cierre de la puerta. Código de función Fb-15 Nombre del parámetro Tiempo de retención de puerta abierta especial Rango de ajuste 10–1000 Defect o 30 Unidad s Propieda d ☆ Se utiliza para establecer el tiempo de retención de la puerta abierta cuando hay una llamada de discapacidad. Código de función Fb-16 Nombre del parámetro Tiempo de retención de puerta abierta manual Rango de ajuste 1–60 Defect o 5 Unidad s Propieda d ☆ Se utiliza para establecer el retardo de límite de apertura de la puerta en el caso de la puerta manual. Este parámetro es válido cuando se utiliza la función de puerta manual. Código de función Fb-17 Nombre del parámetro Tiempo de retención de cierre forzado de puerta Rango de ajuste 5–180 Defect o 120 Unidad s Propieda d ☆ Se utiliza para ajustar el tiempo de retención antes de que se realice el cierre forzado de la puerta. Si la función de cierre forzado de puerta está activada, el sistema entra en el estado de cierre forzado de puerta y envía una señal de cierre forzado de puerta cuando no hay señal de cierre de puerta después de que se alcance el tiempo ajustado en este parámetro. Grupo FC: Parámetros de función de protección Código de función FC-00 Nombre del parámetro Función de protección de control de programa Rango de ajuste 0–65535 Defect o 0 Unidad - Propieda d ★ Se utiliza para establecer el control de programa relacionado con funciones de protección. "1" indica que la función está activada, y "0" indica que la función está desactivada. FC-00 Cotrol de programa para función de protección Bit Función Descripción Detección Bit0 de cortocircuito a tierra de encendido Bit1 Defecto Se detecta si el motor está en cortocircuito a tierra al encenderse. Si el motor está en cortocircuito a tierra, el 0 controlador bloquea la salida de inmediato, e informa un fallo Reservado - 0 Durante el funcionamiento a velocidad normal , el ascensor Bit2 desacelera hasta parar inmediatamente Desacelera para parar después de que la cortina de luz actúe, y luego se dirige al en la cortina de luz piso de destino registrado después que la cortina de luz se válida restaure. Esta función se utiliza principalmente en el caso 0 de la puerta manual. En este modo, no se requiere la señal de límite de apertura/ cierre de puerta, y el sistema automáticamente Modo Bit9 sin límite apertura/ cierre de de puerta juezga el límite de apertura/ cierre de puerta. El sistema determina que el límite de apertura de puerta se completa 0 3s después de que el mando de abrir puerta se emita y que el límite de cierre de puerta se completa 3s después de que el mando de cerrar puerta se emita. Código Nombre del de Rango de ajuste parámetro función Defect o Unidad Propieda d Control del programa 2 FC-01 para la función de 0–65535 0 - ★ protección Se utiliza para establecer el control de programa relacionado con las funciones de protección. "1" indica que la función está activada, y "0" indica que la función está desactivada. FC-01 Control del programa 2 para la función de protección Bit Bit0 Función Protección de sobrecarga Cancelar Bit1 protección Descripxión Defecto Se establece si se aplica la protección de sobrecarga. 1 la a la pérdida de fase de Se establece si se aplica la protección a la pérdida de fase de salida. 0 salida Juicio de cortina de Bit4 al límite de cierre de puerta Bit5 Cancelar juicio de Al límite de cierre de puerta, la puerta se abre de nuevo si la cortina de luz es válida. It sets whether to implement wire-breaking detection on 0 0 comunicación de SPI SPI communication between the MCB and the drive board. Se establece si se aplica la detección de ruptura de cable en la comunicación de SPI entre el MCB y el tablero de accionamiento. Bit6 Reservado - 0 Bit8 Reservado - 0 Cancelación Bit14 protección de a la pérdida de fase de Se establece si se aplica la protección a la pérdida de fase de entrada. 0 entrada Código de función Nombre del parámetro Rango de ajuste Defect o Unidad Propieda d Coeficiente de FC-02 protección de 0.50–10.00 1.00 - ★ sobrecarga Después de detectar que la corriente de salida excede (FC-02 x corriente nominal del motor) y dura el tiempo especificado en la curva de desfase temporal inverso, el sistema emite fallo de Err11 indicando la sobrecarga del motor. Código de función FC-03 Nombre del parámetro Coeficiente de preaviso de sobrecarga Rango de ajuste 50–100 Defect o 80 Unidad % Propieda d ★ Después de detectar que la corriente de salida excede (FC-03 x corriente nominal del motor) y dura el tiempo especificado en la curva de desfase temporal inverso, el sistema emite una señal de preaviso. Código de función FC-04 Nombre del parámetro Selección de puerta opuesta Rango de ajuste 0–3 Defect o Unidad 0 - Se utiliza para ajustar la función de control relacionada con la puerta opuesta. Los valores son los siguientes: 0: Control simultáneo 1: Llamada de piso independiente, llamada de cabina simultánea 2: Llamada de piso independiente, llamada de cabina por contol munual 3: Llamada de piso independiente, llamada de cabina independiente Propieda d ★ Para obtener detalles sobre el uso de la puerta opuesta, véase la sección 5.2.3. Código Nombre del de parámetro función FC-06 Rango de ajuste Fallo designado Defect o 0–99 Unidad - 0 Propieda d ☆ Se utiliza para designar el fallo a vigilar. El código de fallo designado se guarda en los parámetros de FC-07 a FC-19, y no se sobrescribirá. Código de función FC-07 FC-08 FC-09 FC-10 FC-11 FC-12 FC-13 Nombre del parámetro Código de fallo designado Subcódigo de fallo designado Día y mes de fallo designado Minuto y hora de fallo designado Información lógica de fallo designado Información de curva de fallo designado Velocidad ajustada a fallo designado Propieda Rango de ajuste Defecto Unidad 0–9999 0 - ● 0–65535 0 - ● 0–1231 0 MM.DD ● 0–23.59 0 HH.MM ● 0–65535 0 - ● 0–65535 0 - ● 0.000–4.000 0 m/s ● 0.000–4.000 0 m/s ● 0.0–999.9 0 V ● 0.0–300.0 0 m ● 0.0–999.9 0 A ● 0.00–99.99 0 Hz ● 0.0–999.9 0 A ● Rango de ajuste Defecto Unidad d Velocidad de FC-14 retroalimentación a fallo designado FC-15 FC-16 FC-17 FC-18 FC-19 Tensión del bus a fallo designado Posición actual a fallo designado Corriente de salida a fallo designado Frecuencia de salida a fallo designado Corriente de par a fallo designado Código Nombre del de parámetro Propiedad función FC-20 FC-21 FC-22 FC-23 FC-24 FC-25 FC-26 FC-27 Primer código de fallo Primer subcódigo de fallo Día y mes de primer fallo Minuto y hora de primer fallo Código de fallo segundo Subcódigo de fallo segundo Día y mes de fallo segundo Minuto y hora de fallo segundo 0–9999 0 - ● 0–65535 0 - ● 0–1231 0 MM.DD ● 0–23.59 0 HH.MM ● 0–9999 0 - ● 0–65535 0 - ● 0–1231 0 MM.DD ● 0–23.59 0 HH.MM ● 0–9999 0 - ● 0–65535 0 - ● 0–1231 0 MM.DD ● 0–23.59 0 HH.MM ● ··· FC-56 FC-57 FC-58 FC-59 Código de fallo décimo Subcódigo de fallo décimo Día y mes de fallo décimo Minuto y hora de fallo décimo Estos parámetros registran los últimos 10 fallos del ascensor. El código de fallo es un número de 4 dígitos. Los dos bits altos indican el piso donde el coche se encuentra cuando se produce el fallo, y los dos dígitos bajos indican el código de fallo. Por ejemplo, el primer código de fallo es 0835, lo que indica que cuando el primero fallo - fallo de Err35 ocurre, el coche está cerca del piso 8. El subcódigo de fallo se utiliza para localizar las causas del fallo. El tiempo de fallo específico se registra en mes, día, hora y minuto. Código de Prop Nombre del parámetro Rango de ajuste Defecto Unidad función ieda d FC-60 Último código de fallo 0–9999 0 - ● FC-61 Último subcódigo de fallo 0–65535 0 - ● FC-62 Día y mes de último fallo 0–1231 0 MM.DD ● 0–23.59 0 HH.MM ● 0–65535 0 - ● 0–65535 0 - ● FC-63 FC-64 FC-65 Latest fault hour and minute Minuto y hora de último fallo Información lógica de último fallo Información de curva de último fallo FC-66 FC-67 Velocidad ajustada a último fallo Velocidad de retroalimentación a último fallo 0.000–4.000 0 m/s ● 0.000–4.000 0 m/s ● FC-68 Tensión de bus a último fallo 0.0–999.9 0 V ● FC-69 Posición actual a último fallo 0.0–300.0 0 m ● 0–999.9 0 A ● 0.00–99.99 0 Hz ● 0.0–999.9 0 A ● FC-70 FC-71 FC-72 Corriente de salida a último fallo Frecuencia de salida a último fallo Corriente de par a último fallo Grupo Fd: Parámetros de comunicación Código de función Nombre del parámetro Fd-00 Velocidad en baudios Fd-02 Dirección local Fd-03 Retardo de respuesta de comunicación Fd-04 Tiempo de espera de comunicación Rango de ajuste 0: 9600 1: 38400 0–127 0: Dirección de difusión 0–20 0.0–60.0 0: Inválido Defect o Unidad Propieda d 0 bit/s ★ 1 - ★ 10 ms ★ 0.0 s ★ Estos parámetros de comunicación del puerto serial RS232 se utilizan para la comunicación con el software del monitor en el ordenador anfitrión. Fd-00 especifica la velocidad en baudios para la comunicación serial. Fd-02 especifica la dirección actual del controlador. El ajuste de estos dos parámetros debe ser consistente con el ajuste de los parámetros del puerto serial del ordenador anfitrión. Fd-03 especifica el retardo para que el controlador envíe los datos por medio del puerto serial. Fd-04 especifica el tiempo de espera de comunicación del puerto serial. La transmisión de cada cuadro debe ser completado dentro del tiempo establecido en Fd-04; de lo contrario, se produce un fallo de comunicación. Código de función Fd-05 Nombre del parámetro Demora de paro de re-nivelación Rango de ajuste 0.00–2.00 Defect o 0.00 Unidad s Propieda d ★ Se utiliza para establecer la demora de parada en re-nivelación. Después de recibir la señal de nivelación durante la re-nivelación, el ascensor se detiene tras la demora ajustada en este parámetro. Código de función Nombre del Rango de ajuste parámetro Defect Unid Propieda o ad d 1 - ★ 2 - ★ 0: Reservado Fd-07 HCB:Entrada JP1 de NA/NC: 1/33: Señal de bloqueo del ascensor 2/34: Señal de emergencia de incendio 3/35: Piso actual prohibido 4/36: Señal de piso de VIP Fd-08 HCB:Entrada JP2 de 5/37: Señal de piso de seguridad 6/38: Entrada de botón de cerrar puerta 7/39: Entrada de la segunda capa de fuego en piso Estos parámetros se utilizan para ajustar las funciones de los pines 2 y 3 del JP1 y JP2 en el HCB. El ajuste es efectivo para los HCB para todos los pisos. Código de función Nombre del Rango de ajuste parámetro Fd-09 HCB:Salida JP1 de Fd-10 HCB:Salida JP2 de 0: Inválido 1: Indicador de llegada arriba 2: Indicador de llegada abajo 3: Salida de fallo 4: Salida de parada en zona sin puerta 5: Salida de estado de no-servicio 6: Salida de indicador de botón de cerrar puerta Defect o Unidad Propieda d 1 - ★ 2 - ★ Estos parámetros se utilizan para ajustar las funciones de los pines 1 y 4 del JP1 y JP2 en el HCB. El ajuste es efectivo para los HCBs para todos los pisos. La capacidad de carga de salida del HCB es limitada, con la tensión de salida de 24 V y la potencia de carga no mayor que 1 W. Código de función Nombre del parámetro Rango de ajuste Defecto Unidad Propieda d Fd-11 Fd-12 Fd-13 Fd-14 Fd-15 Fd-16 HCB-B:Entrada de JP1 HCB-B:Entrada de JP2 HCB-B:Entrada de JP3 HCB-B:Entrada de JP4 HCB-B:Entrada de JP5 HCB-B:Entrada de 0: Inválido Entrada NA/NC : 1/33: Señal de carga ligera 2/34:Señal de media carga 3/35:Selección de la puerta 2 4/36: Puerta 2 restringida (Puerta trasera prohibida) 5/37: Borde de seguridad de puerta 1 6/38: Borde de seguridad de puerta 2 7/39: Selección de puerta individual/doble JP6 0 - ★ 0 - ★ 0 - ★ 0 - ★ 0 - ★ 0 - ★ Estos parámetros se utilizan para ajustar las funciones de los pines 2 y 3 del JP1 a JP6 en el bordo de conversión paralelo-serial sin-pantalla de HCB-B. El ajuste es eficaz para todo HCB-Bs conectados al sistema. Código de función Nombre del parámetro Rango de ajuste Defecto Unidad Propiedad Fd-17 HCB-B: Salida de A1 0: Inválido 0 - ★ Fd-18 HCB-B:Salida de A2 1: Salida de fallo 0 - ★ HCB-B:Salida de B1 2: Salida de parada en 0 - ★ HCB-B:Salida de B2 zona sin puerta 0 - ★ HCB-B:Salida de C1 3: Salida de estado de 0 - ★ HCB-B:Salida de C2 sin-servicio 0 - ★ HCB-B:Salida de C3 4: Salida de emergencia de 0 - ★ HCB-B:Salida de C4 incendio 0 - ★ HCB-B:Salida de C5 5: Salida de emergencia de 0 - ★ 0 - ★ Fd-19 Fd-20 Fd-21 Fd-22 Fd-23 Fd-24 Fd-25 corte de energía Fd-26 HCB-B:Salida de C6 6: Bloqueo de puerta válido 7: Señal de salida de noche Estos parámetros se utilizan para ajustar las funciones de cuatro salidas de relé y seis salidas de colector abierto en el bordo de conversión paralelo-serial sin-pantalla de HCB-B en el HCB-B. El ajuste es eficaz para todo HCB-B conectado al sistema. Grupo FE: Parámetros de función del ascensor Código de función FE-00 Nombre del parámetro Modo de selectivo colectivo Rango de ajuste 0–2 Defect o 0 Unidad - Propieda d ★ Se utiliza para establecer el modo de selectivo colectivo del sistema. Los valores son los siguientes: 0: Colectivo selectivo completo El ascensor responde a llamadas de piso tanto arribo como abajo. 1: Colectivo selectivo abajo El ascensor responde a las llamadas de piso hacia abajo, pero no responde llamadas de piso hacia arriba a hasta. 2: Colectivo selectivo arriba El ascensor responde a las llamadas de piso hacia abajo, pero no responde a las llamadas de piso hacia abajo. Código de función FE-01 FE-02 FE-03 FE-04 FE-05 FE-06 FE-07 FE-08 FE-09 FE-10 Nombre del parámetro Visualización de piso 1 Visualización de piso 2 00: Indica "0" 22: Indica "23" Visualización de 01: Indica "1" 23: Indica "C" piso 3 02: Indica "2" 24: Indica "D" Visualización de 03: Indica "3" 25: Indica "E" piso 4 04: Indica "4" 26: Indica "F" Visualización de 05: Indica "5" 27: Indica "I" piso 5 06: Indica "6" 28: Indica "J" Visualización de 07: Indica "7" 29: Indica "K" piso 6 08: Indica "8" 30: Indica "N" Visualización de 09: Indica "9" 31: Indica "O" piso 7 10: Indica "A" 32: Indica "Q" Visualización de 11: Indica "B" 33: Indica "S" piso 8 12: Indica "G" 34: Indica "T" Visualización de 13: Indica "H" 35: Indica "U" piso 9 14: Indica "L" 36: Indica "V" Visualización de 15: Indica "M" 37: Indica "W" piso 10 16: Indica "P" 38: Indica "X" 17: Indica "R" 39: Indica "Y" Visualización de 18: Indica "-" 40: Indica "Z" piso 31 19: Sin indica 41: Indica "15" Visualización de 20: Indica "12" 42: Indica "17" piso 32 21: Indica "13" 43: Indica "19" Visualización de piso 11-30 FE-31 FE-35 FE-36 FE-37 Rango de ajuste Visualización de piso 33 Visualización de Defecto Unidad 1901 - 1902 - 1903 - 1904 - 1905 - 1906 - 1907 - 1908 - 1909 - 0100 - Propied ad ☆ ☆ ☆ ☆ ☆ ☆ ☆ ☆ ☆ ☆ ··· 0301 0302 - ☆ - ☆ 0303 - 0304 - ☆ ☆ piso 34 FE-38 FE-39 FE-40 FE-41 FE-42 FE-43 Visualización de piso 35 Visualización de piso 36 Visualización de piso 37 Visualización de piso 38 Visualización de piso 39 Visualización de piso 40 0305 - 0306 - 0307 - 0308 - 0309 - 0400 - ☆ ☆ ☆ ☆ ☆ ☆ Estos parámetros se utilizan para ajustar la visualización de cada piso. El rango de ajuste es de 0000-9999, donde los dos bits altos indican el código de visualización de dígitos de las decenas, y los dos bits bajos indican el código de visualización de dígitos de la unidad. Código de Nombre del parámetro Rango de ajuste Defecto Unidad 0 - 0 - 0 - 0 - 0 - función FE-52 FE-53 FE-54 FE-55 FE-56 Selección de dígitos más altos 1 Selección de dígitos más altos 2 Selección de dígitos más altos 3 0–4099 Selección de dígitos más altos 4 Selección de dígitos más altos 5 Propieda d ☆ ☆ ☆ ☆ ☆ Estos parámetros se utilizan para ajustar la visualización especial de piso. Cuando la visualización de 2 dígitos no puede cumplir con el requisito, usted puede agregar la visualización de tercer dígito mediante el establecimiento de estos parámetros. En los valores de estos parámetros, los dos dígitos altos indican la dirección de piso que requiere visualización especial, y los dos dígitos bajos indica el contenido de la visualización. Por ejemplo, si el piso 18 se necesita que se muestra como "17A", establece FE-18 en 0710 (indica "7A"), y luego ajuste la visualización de dígito más alto, es decir, FE-52 en 1801 (lo que indica que la visualización de dígito más alto de dirección del piso 18 es "1"). Código Nombre del de parámetro Rango de ajuste Defect o Unidad Propieda d función FE-32 Selección de función de 0–65535 ascensor 1 34816 - ☆ Se utiliza para ajustar las funciones del ascensor. "1" indica que la función está activada, y "0" indica que la función está desactivada. FE-32 Selección de función de ascensor 1 Bit Function Description Default Bit0 Reservado - 0 Bit1 Reservado - 0 El ascensor realiza renivelación a una velocidad baja Bit2 Función de re-nivelación con la puerta abierta. Un contactor externo de cortocircuito de circuito de bloqueo de puerta se 0 debe utilizar conjuntamente. Durante la parada normal, cuando la velocidad del ascensor es menor que un cierto valor y la señal de Bit3 Función de pre-apertura de puerta zona de puerta está activa, el sistema cortocircuita la cerradura de la puerta por medio del contactor de cortocircuito de circuito de bloqueo de puerta y emite 0 la señal de apertura de puerta para realizar la pre-apertura de puerta. Esto mejora la eficiencia del uso del ascensor. Cancelación Bit4 de atascado de llamada de piso Bit5 Función del piso de seguridad nocturna selectivo colectivo abajo Bit7 Servicio los botones de llamada de piso. Si el estado es anormal, el sistema cancela la llamada de piso 0 atascada. Servicio de pico de Bit6 El sistema identifica automáticamente el estado de de pico paralelo/ de grupo Desde las 10:00 pm a 6:00 am, el ascensor va al piso de seguridad en primer lugar cada vez, se detiene y 0 abre la puerta, y luego se dirige al piso de destino. Se utiliza el servicio de pico de colectiva selectiva hacia abajo. Se utiliza el servicio de pico. Para servicio basado en el descripción de los parámetros relacionados en grupo tiempo F6 . Bit9 Función de VIP Se utiliza la función de VIP. 0 Bit10 Reservado - 0 Bit11 Bit12 Bit13 Eliminación consulte la Una llamada se puede eliminar pulsando el botón de dos veces consecutivas. llamada de piso Reservado información, de llamada de cabina Eliminación más 0 Función del piso de Bit8 obtener 0 - 0 1 0 0 Bit14 Reservado - 0 Bit15 Reservado - 1 Código Nombre del de parámetro función FE-33 Rango de ajuste Selección de función de ascensor 2 0–65535 Defect o Unidad 36 Propieda d - ☆ Se utiliza para ajustar las funciones del ascensor. "1" indica que la función está activada, y "0" indica que la función está desactivada. FE-33 Selección de función de ascensor 2 Bit Función Descripción Defecto Bit0 Reservado - 0 Retención de puerta Bit1 abierta en el límite de apertura de puerta El sistema todavía emite el mando de abrir puerta al límite de apertura de la puerta 0 No se emite el mando Bit2 de cerrar puerta al El sistema deja de emitir el mando de cerrar puerta límite de cierre de al límite de cierre de puerta. 1 puerta Bit3 Reservado - 0 Si la retroalimentación de los contactores de RUN y de freno es anormal, fallos Err36 y Err37 son Bit4 Restablecimiento reportados, y es necesario reiniciar el sistema automático de manualmente. contactor de RUN y Con esta función, el sistema se reinicia freno pegado automáticamente después de que desaparezca el 0 síntoma de fallo. Un máximo de tres tiempos de restablecimiento de automóviles son compatibles. Bit5 Detección de El sistema detecta el estado de los interruptores de interruptor de desaceleración. Una vez que se detecta que un desaceleración interruptor de desaceleración está atascado, el pegado sistema ordena al ascensor para frenar 1 inmediatamente y reporta un fallo correspondiente. Bit6 Reservado - 0 Si la puerta aún no se cierra dentro del tiempo Bit7 Cierre forzado de puerta establecido en Fb-17 en estado automático, el sistema emitirá la señal de cierre forzado de puerta; 0 en este momento, la cortina de luz deja de ser válida y el zumbador pía. NA/NC de contactor Bit8 de cortocircuito de estator de motor Se utiliza contactor de NA, Bit8=1 Se utiliza contactor de NC, Bit8=0 0 El ascensor desacelera hasta detenerse inmediatamente después de recibir una única señal Bit9 Parada inmediata en de nivelación durante la re-nivelación. Por defecto, la re-nivelación cuando se recibe una señal de nivelación, el ascensor 0 se detiene después de la demora de parada de re-nivelación establecida en Fd-05. Bit10 to Reservado - 0 Bit12 Una velocidad máxima permitida se establece cuando Bit13 Función de protección el coche está en la posición del interruptor de del ascensor de alta desaceleración. Cuando el ascensor excede la velocidad velocidad en esta la posición, el sistema emite una 0 señal de protección. Bit14 Bit15 Reservado Control independiente de puerta opuesta - 0 Para más detalles, véase la sección de 5.2.3. 0 Grupo Fr: Parámetros de ajuste de nivelación Código de función Fr-00 Nombre del parámetro Función de ajuste de nivelación Rango de ajuste Defect o 0: Desactivado Unidad 0 1: Habilitado - Propieda d ★ Este parámetro se utiliza para activar la función de ajuste de nivelación. Código de Nombre del parámetro Rango de ajuste Defect o función Fr-01 Fr-02 Registro de ajuste de nivelación 1 Registro de ajuste de nivelación 2 00000–60060 Propieda d 30030 mm ★ 30030 mm ★ … Fr-20 Unidad … Registro de ajuste de nivelación 20 30030 mm ★ Estos parámetros se utilizan para registrar los valores de ajuste de nivelación. Cada parámetro graba la información de ajuste de dos pisos, y por lo tanto, la información de ajuste de 40 pisos se pueden grabar totalmente. El método de ver el registro se muestra en la figura siguiente. Figura 7-9 Muestra del registro de ajuste de nivelación Como se muestra en la figura anterior, los dos LEDs de izquierda y los dos LEDs de derecha muestran respectivamente las bases de ajuste de piso 1 y el piso 2. Si el valor es mayor que 30, es ajuste de nivelación hacia arriba; si el valor es menor que 30, es ajuste de nivelación hacia abajo. El valor por defecto "30" indica que no hay ajuste de nivelación. El rango de ajuste máximo es de ± 30 mm. El método de ajuste de nivelación es como sigue: Asegúrese de que el autoajuste de ducto se completa con éxito, y el ascensor funciona correctamente a la velocidad normal. Set Fr-00 en 1 para activar la función de ajuste de nivelación de cabina. Luego, el ascensor no responde a llamadas de piso y automáticamente marcha al piso superior, y mantiene la puerta abierta después de la llegada. Si el ascensor está en el piso superior, mantiene directamente la puerta abierta. Entre en el coche, pulse el botón del piso superior, y la posición de nivelación se cambia 1 mm hacia arriba; pulse el botón de piso inferior, y la posición de nivelación se cambia 1 mm hacia abaj. El valor se muestra en el coche .. Valor positivo: flecha arriba + valor, valor negativo: flecha abajo + valor, rango de ajuste: ± 30 mm Después de completar el ajuste para el piso actual, pulse el botón de piso superior y el botón de piso inferior en el coche al mismo tiempo para guardar el resultado del ajuste. La pantalla en el coche restaura a su estado normal. Si la posición de nivelación del piso actual no necesita ser ajustado, pulse el botón del piso superior y el botón de piso inferior en el coche al mismo tiempo para salir del estado de ajuste de nivelación. Luego, las llamadas de cabina se pueden registrar. Pulse el botón de cerrar puerta y pulse el botón correspondiente al siguiente piso. El ascensor marcha al siguiente piso y mantiene la puerta abierta después de la llegada. Luego, puede realizar el ajuste de nivelación . Después de completar el ajuste de todos los pisos, ajuste Fr-00 en 0 para deshabilitar la función de ajuste de nivelación. De lo contrario, el ascensor no se puede utilizar. Preste atención a las siguientes precauciones durante la operación: Cada vez que se realiza el autoajuste de ducto, todos los parámetros de ajuste de nivelación se pueden borrar o reservar a. Si establece F1-11 en 3 en el operador o F-7 en 1 en el teclado, todos los parámetros de ajuste de nivelación se reservan. b. Si establece F1-11 en 4 en el operador o F-7 en 2 en el teclado, todos los parámetros de ajuste de nivelación son eliminados. Cuando se utiliza la función de re-nivelación, la función de ajuste de nivelación está apantallada automáticamente y no se puede utilizar. Grupo FF: Parámetros de fábrica Grupo FP: Parámetros de usuario Código de función FP-00 Nombre del parámetro Contraseña de usuario Rango de ajuste 0–65535 Defect o 0 Unidad - Propieda d ☆ Se utiliza para establecer la contraseña de usuario. Si se establece en cualquier número que no sea cero, la función de protección de contraseña está activada. Después de que una contraseña se haya establecido y entre en vigor, debe introducir la contraseña correcta para entrar en el menú. Si la contraseña introducida es incorrecta, no se puede ver o modificar parámetros. Si FP-00 se establece en 00000, la contraseña de usuario establecida previamente se borra, y la función de protección de contraseña está desactivada. Recuerde la contraseña que ha establecido. Si la contraseña está mal configurado o se olvida, póngase en contacto con Monarch para reemplazar la tarjeta de control. Código de función FP-01 Nombre del parámetro Actualización de parámetros Rango de ajuste 0–2 Defect o 0 Unidad - Propieda d ★ Se utiliza para ajustar el procesamiento de parte de los parámetros. Los valores son los siguientes: 0: Sin operación 1: Restaurar configuración predeterminada 2: Borrar registros de fallos Si establece este parámetro en 1 (Restaurar configuración predeterminada), todos los parámetros excepto grupo F1 se restauran a los valores predeterminados. Tenga precauciones con este ajuste. Código de función Nombre del parámetro Rango de ajuste Defect o Unidad Propieda d Visualización de los FP-02 parámetros definidos por el usuario 0: Inválido 1: Válido 0 - ★ Se utiliza para establecer si se muestran los parámetros que se han modificado. Cuando se establece en 1, se muestran los parámetros que son diferentes a la configuración predeterminada.
 0
0
Anuncio
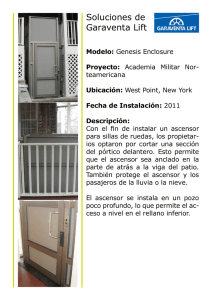




Descargar
Anuncio
Añadir este documento a la recogida (s)
Puede agregar este documento a su colección de estudio (s)
Iniciar sesión Disponible sólo para usuarios autorizadosAñadir a este documento guardado
Puede agregar este documento a su lista guardada
Iniciar sesión Disponible sólo para usuarios autorizados