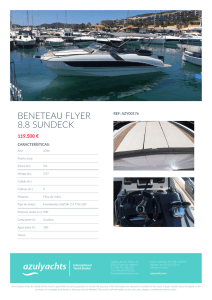
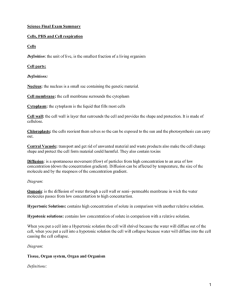
Figure 42.1 UT742 Combination Pipe Layer/OSV Chapter 42 Offshore Support Vessels Richard White 42.1 INTRODUCTION Offshore oil and gas exploration and production became one of the world’s leading economic activities in the late 20th century. As reserves under dry land became more closely defined, the focus moved to examine the extent to which oil and gas might be recoverable from the sea bed. By trial well drilling, and increasingly by seismic surveying, the location of reserves under the continental shelves is being mapped and the trend has been to move into ever deeper and more hostile waters. To exploit these resources a large industry has grown up employing floating drilling rigs, ships and moored or fixed production platforms. These various units require different types of support operation and to supply this support a range of vessel types has been developed over the years. Figure 42.1 is a perspective view of a large multifunctional anchor handling tug/supply and subsea service vessel, the 95 m long design UT742 from Rolls-Royce. Sub sea trenching can be undertaken using the A-frame and the vessel is shown with equipment for laying flexible pipe through one of the two moonpools. Offshore support vessels are typically operated by shipowners: either companies set up specifically to own and operate such vessels or companies which combine offshore support vessel operation with other activities such as towage and salvage, conventional ship owning, or other industrial and business activities. Offshore oil and gas exploration and production is in the hands of numerous organizations. These range from state-owned oil companies through consortia of oil companies and other interests to industrial companies who contract to provide specific services to a project. The requirements of the explorers and producers for support vessel services are matched to the vessels available by a number of different mechanisms. There is a thriving spot market, which acts as a clearinghouse for relatively short-term contracts. For example, the operator of a semisubmersible drilling rig may require the services of anchor handling tug supply vessels (AHTS) for a 3-month drilling operation shifting the rig to and from the drilling location. Numerous vessels of this class operate on the spot market, graded by size, capacity and power, with dayrates which vary according to the capabilities of the vessels and the state of supply and demand in that market sector. For long term support of fixed platforms it is more common to engage vessels on multi-year contracts, often with options for renewal or extension. This type of charter may be secure enough to warrant the building of one or more support vessels whose characteristics are adapted to the needs of a particular platform or field. In some cases the support vessel may spend its entire economic life on essentially the same job. 42.1.1 Mission and Design Drivers The general mission is the support of offshore oil and gas exploration and production. This can be broken down into a large number of specific missions. A vessel may be designed to undertake a single specific mission but it is much more common to combine several types of activity. Where this involves a compromise, the shipowner must decide the 42-1 42-2 Ship Design & Construction, Volume 2 best balance between conflicting requirements, and the vessel designer must interpret the mission statement into a vessel that meets the operating requirements and relevant safety codes. Specific missions include: • seismic surveys to locate sub sea oil and gas bearing geological formation, • towing of rigs and fixed platforms to exploration and production sites, positioning these structures and laying anchors and moorings, • supplying rigs and platforms with necessary personnel, equipment, consumables, stores, etc. – pipes – drilling consumables, mud, cement, drill water, etc – fuel – fresh water – mechanical spares – food – other stores – crew change – removal of waste • subsea operations, including – inspection and ROV operation – diving support including decompression – subsea completion including trenching and flexible pipe laying, – inspection and maintenance, • safety standby, • well intervention, and • a combination of several of the above functions. and chemicals for specialized operations. This supply operation is typically carried out by platform supply vessels (PSV). The design and construction of this type of vessel varies somewhat in different parts of the world and depends on the weather conditions, the distance from the shore base, and whether personnel transfer is also undertaken or if that is handled separately by dedicated crew boats or helicopters. The PSV loads at a shore base. Liquid cargo is carried in double bottom tanks, dry bulk cargoes in special pneumatic pressure tanks and equipment and drill pipe on the aft open working deck. At the rig or platform, liquid and powder cargoes are pumped up or transferred pneumatically while deck cargo is handled by the rig’s crane. The general layout of PSVs has become fairly standardised, with a large open working deck aft and the accommodation forward as shown in Figure 42.2, which is an example of the popular UT705 platform supply vessel, but there are significant variations in detail from designer to designer. Preferred sizes, drafts and deadweights vary with operating area. Anchor handlers: Anchor handling tug supply vessels, normally abbreviated to AHTS, form the largest group of offshore support vessels after PSVs. As the name suggests, they combine a number of functions in a single hull. These Multi-purpose vessels combining offshore support with other duties such as laying telecommunications cable, ice breaking, floating storage and production, are becoming popular. The offshore oil and gas industry is characterised by its rapid rate of change. Advances in knowledge and technology lead to new solutions. These in turn give rise to different requirements to which the support vessel industry must respond. The response may be either to develop new types of vessel, or to convert suitable existing tonnage for new tasks. 42.1.1.1 Main types of vessel Platform supply vessels: Offshore rigs and production platforms require periodic re-supply with fuel, fresh water for the personnel, food, equipment and also a number of fluids and powders used in drilling operations. These are typically cement, baryte and bentonite transported as dry powders; drill water; of oil or water based liquid mud, methanol Figure 42.2 Platform Supply Vessel Far Superior Chapter 42: Offshore Support Vessels include handling the anchors and mooring chains and ropes for drilling rigs, towing of rigs and platforms together with subsequent positioning on site, and platform supply duties. The required bollard pull has a powerful influence on the design, since this defines the power needed, the propeller size, hull shape and depth aft to give the necessary propeller immersion. Hull beam and shape will be that needed to give stability, particularly when heavy moorings and anchors are suspended from the stern. Anchor handling requires high power, winch capacity, deck space aft, storage bins for rig chains, and auxiliary handling equipment. The supply function is similar to the work of a PSV, involving the transport of liquid, powder and solid cargoes, the latter as deck load. A typical AHTS is shown in Figure 42.3. It is a cutaway view of a UT740, showing current thinking on AHTS design. The pulling power and required wire/rope capacities of the towing and anchor-handling winch are the principal design driver. Winch design is covered in more detail below. The hull must be stiffened to distribute the winch loads, and brake forces and direct wire pulls can be more than 650 tonnes and 500 tonnes respectively in the most power- 42-3 ful vessels. Powers up to 28 000 HP are becoming common for vessels that handle moorings in very deep water. 42.1.1.2 Seismic vessels Seismic survey vessels are an integral part of the search for offshore oil and gas deposits. Geological structures below the seabed can be presented in two-dimensional, three-dimensional or 3D/time, form and data is produced by special seismic survey ships. The vessel periodically emits a percussive signal from an air gun array, which is reflected from subsea formations. The returning signals are picked up by arrays of hydrophones and the signals are either analysed onboard or stored for subsequent analysis ashore. These hydrophones are fitted in streamer cables which typically comprise lengths of flexible plastic tubing joined end to end by special connectors, filled with a mineral oil to give neutral buoyancy and housing hydrophones and connecting and towing cables at intervals along their lengths. The survey vessel tows a series of these streamers. The number of parallel streamers towed has increased over the years. Currently larger vessels operate with up to twelve streamers at once and some are capable of handling up to Figure 42.3 AHTS Multi-functional OSV 42-4 Ship Design & Construction, Volume 2 twenty. Vanes are used to spread the streamers so that they trail at a set separation, altogether covering an area of several square kilometres. The broader the footprint of the survey the larger the area covered at a given ship speed in a given time and the fewer runs required to classify a given location. Dedicated seismic survey vessels are highly specialised ships. The working decks are enclosed but typically are open at the stern and at a lower level have the air gun handling system and storage, and at a higher level the winches and storage reels for the streamers. Special guide systems are installed at the stern opening to ensure that the vulnerable streamers are safely and correctly deployed. The ship itself must be capable of accurate track and station keeping and the propulsion system must have low radiated noise and minimal propeller induced noise to avoid interference with the survey equipment. Because of the requirement to deploy as many streamers as possible, the breadth of the stern of the vessel is critical. In some cases radical solutions have been chosen, for example the almost triangular Ramform. Other operators prefer a more conventional ship form with wide decks at the stern above the waterline, Figure 42.4. Highly specialized winch and cable handling systems are installed and dominate the internal layout of the vessel. The required accuracy of track following and navigation has increased with the growing interest in 4D survey- ing, that is three-dimensional survey with updates from time to time which indicate how oil reservoirs are being depleted and give guidance as to how future wells should be planned. Apart from seismic survey vessels deploying streamers on the surface, there are some vessels specialised for bottom cable surveying. Seismic ships typically spend months or years continually at sea, with replenishment by support vessel and helicopter crew transfers. Most newer vessels now undertake much of the work of analysing data on board. Space must therefore be allocated to large computer rooms and meeting areas, and accommodation has to be provided for a large number of people in addition to the marine crew. Figure 42.4 Seismic Vessel Figure 42.5 Crewboat with Underdeck and On-deck Cargo Capacity 42.1.1.3 Crewboats In areas such as the Gulf of Mexico, ferrying of crews and light supplies the shore and rigs and platforms has always been important. Crewboats can carry both passengers and supplies. The trend is to larger craft such as the 56.4 m John B Martin McCall, which can carry 86 passengers, fuel, water, and 350 tonnes of deck cargo, as shown in Figure 42.5. Relatively fast aluminum craft powered by high-speed diesels have been the preferred solution. Sizes have increased over the years from the 20 m of early boats to 40 m, and more recently to 45 to 50 m. The trend is towards even larger vessels in the 185 ft range, capable of carrying 80 to 100 passengers and a total load of about 350 tonnes at 20 to 28 knots. These deadweights and speeds require in excess of 8000 hp. Aluminium remains the favored material for hull and superstructure with a conventional monohull layout, wheelhouse and passenger cabin forward and an open weather deck aft, protected by crash rails, on which deck cargo can be transported. An important element is the supply of fuel and fresh water, which is carried in tanks below decks. Chapter 42: Offshore Support Vessels To provide the necessary propulsion power, multiple diesel engines are preferred, each driving its own propeller. Typically four to six diesel engines are used. There is a move towards water jet propulsion, either using jets alone, or in a twin-screw system with a central boost water jet. The economics of crewboats depend on distance from rig to shore. Relatively short runs, benign weather conditions and groups of rigs/platforms allowing a bus stop operation act in favour of the crewboat. For longer runs and rough seas helicopters may show an advantage over fast boats for crew transfer, but are not effective where significant quantities of supplies must also be moved. In some cases crewboats can compete on longer routes in ocean conditions, but other configurations become of interest, for example SWATH (small waterplane area twin hull) vessels (See Chapter 46), to obtain acceptable levels of passenger comfort. Fast launches are favored as crewboats in some areas, such as West Africa, with limited cargo stowage. 42-5 42.1.1.4 Safety/standby vessels It is a requirement on most offshore fields to have vessels constantly on standby to evacuate personnel from rigs and platforms in the event of an emergency. These vessels are equipped with reception, first aid and hospital facilities, together with seating and facilities for typically 300 survivors. To enable casualties in the water to be taken on board, low freeboard areas are provided at about the midlength of the hull, marked and with clear paths to the reception area. Fast rescue boats are also provided to enable survivors to be brought in. In the early days most standby vessels were converted trawlers as these were cheap and seaworthy. The function is still often carried out by vessels converted from other roles. Rules have become tougher and there is a trend towards purpose built craft for safety standby, as shown in Figure 42.6. The function of the standby vessel is to provide a safe place for rig and platform crews in the event of an accident. Figure 42.6 Standby Vessel Type UT719R now working in the North Sea UK Sector 42-6 Ship Design & Construction, Volume 2 Many PSVs are equipped to carry out this work in addition to their other roles. One advantage of this strategy is that a supply boat, which has delivered cargo to a platform, can relieve a dedicated standby vessel that needs to return to port for bunkers, a crew change or dry-docking. There is also a tendency towards using larger daughter craft for rescue instead of MOB (Man Overboard Boats) boats. Provided the regulatory framework permits it, by this means one large standby vessel can take care of more than one installation. Rules vary considerably from region to region, for example between British and Norwegian sectors of the North Sea. There has been a move away from prescriptive regulations, for example one installation, one standby vessel, towards goal setting. This involves the overall safety case for the installation and gives freedom to propose alternative standby solutions, as long as the required degree of safety cover is available in the event of a fire or evacuation. Offshore vessels are increasingly the design basis for emergency towing, pollution prevention and Exclusive Economic Zone (EEZ) protection ships. 42.1.1.5 Multifunctional vessels Increasing focus on sub sea work, involving construction, inspection and maintenance, is producing a capable breed of multifunctional vessel, Figure 42.7 is an example of the Rolls-Royce UT742 multifunctional AHTS and subsea service vessel, also shown in Figure 42.1. Typically these are based on an anchor handler layout, with varying degrees of platform supply capability. Multiple moonpools enable both work and inspection class remote operated vehicles to be deployed. Power and winch capacity is sufficient to allow trenching for pipe or cables to be carried out in deep water, and provision is usually made for fitting a stern A-frame and a large (1600 tonne meter) heave-compensated offshore crane. Figure 42.7 Multi-functional Vessel with A-Frame Normand Pioneer Chapter 42: Offshore Support Vessels Further vessel developments are coming as new techniques emerge, for example well intervention from an OSV (see Figure 42.30). 42.1.1.6 Combination vessels Sometimes it can be advantageous to combine offshore support capability with some completely unrelated function in a single vessel, for example: Icebreaker/OSV: A grouping which has proved quite popular is to build an icebreaker that in summer can earn a living supporting sub sea construction. The icebreaking function must not be compromised, but the stability, strength and power needed for this application also provide a good basis for a support vessel, as does the available aft working deck. Winter icebreaking work in the Baltic, for example, dovetails well with the weather windows for much North Sea oil and gas work, spreading the capital and operating costs over a longer season and avoiding the need for summer lay-up. The hull form of the Finnish-built combined icebreaker and OSV Bonica is shown in Figure 42.8. A new design is noted in Subsection 42.3.7. Cable layer/OSV: The laying of telecommunications cable is another example where a principal function can also be combined with offshore oil and gas work. There is space below decks, also on deck, for cable tanks, allowing several thousand kilometers of fiber optic cable to be carried and laid. The general layout may will be that of a multipurpose offshore vessel, but there are usually permanent or removable workshops and inspection rooms either side of the working deck, as can be seen in Figure 42.9, which is a good example of a vessel, built in 1996, that 42-7 can combine cable-laying with offshore service work. It can also be readily converted for platform supply duties. In addition to an A-frame, deck cranes and multiple stern sheaves, specialised cable laying equipment will be installed, including linear and drum cable engines. Cable laying contracts tend to be cyclical, and at slack periods the special cable equipment may be removed and the ship converted for ROV operation, sub sea inspection and maintenance, or other work. Some vessels are designed for conversion to PSVs, and PSVs are sometimes convertible to cable layers. 42.2 DESIGN AND CONSTRUCTION 42.2.1 Rules and Regulations for Vessels and Equipment Like other ship types, offshore support vessels are built to a variety of rules and regulations; international, classification society, national, or flag state. The International Maritime Organisation (IMO) rules cover many aspects of vessel construction, equipment and operation. The ones most valid to this class of ship are IMO 649, while for vessels which carry significant numbers of people in addition to their own marine crews are also covered by IMO 534. This is typically the case where additional workers, passengers, technical staff travelling to and from offshore platforms and similar personnel are involved. The majority of support vessels are built to normal ship construction rules, for example Det norske Veritas Rules for Classification of Steel Ships or the corresponding rules promulgated by other classification societies such as Lloyd’s Register of Shipping or the American Bureau of Figure 42.8 Hull Form of Combined Icebreaker and OSV Bothica 42-8 Ship Design & Construction, Volume 2 Figure 42.9 Combined Cable Layer/OSV Maersk Defender (Type UT756) Shipping. US registered vessels normally also need to comply with the requirements of the United States Coast Guard. Construction rules cover scantlings and a variety of other constructional and equipment aspects. For some offshore vessels double hulls may be mandatory, though designers such as UT-Design, from Rolls-Royce, incorporate as much double hull structure as is practicable, for example in way of the engine room. As offshore vessels become more specialised, and new requirements emerge, these needs must be reconciled with the relevant rules. A case in point is a well test and early production vessel such as Crystal Sea (described in Section 42.3.3.7). Here the storage on board of significant quantities of crude oil means that the vessel must comply with the Crude Tanker rules. Production and storage vessels, which may be connected to live wells, must meet a range of specific regulations. National authorities have their own rules for specific types of vessel. For example, safety standby craft operating in the North Sea will normally comply with either the requirements of the Maritime & Coastguard Agency in the UK or the Norwegian Maritime Directorate in Norway. Standby vessels may be dedicated to the job of standing by rigs and platforms to take off personnel in the event of a rig or platform accident. It is becoming more common to combine a safety standby function in a multi-function vessel, for example platform supply or anchor handler. The MSA and NMD requirements are broadly similar but have some differences, two examples being areas devoted to different functions and required number of crew. 42.2.2 Class Notations Offshore vessels share many of the same classification society notations with other types of steel ship. This applies to structure, unmanned engine rooms, one man operated bridges, and similar ship functions. Other notations are more specific. FiFi denotes fire-fighting capability and the notation 1 implies the vessel has fire pumps and monitors making it Chapter 42: Offshore Support Vessels able to fight fires external to itself while of course having the necessary equipment on board for normal own-vessel security. FiFi 2 is a more comprehensive requirement involving greater fire monitor throw and a self-drench system to safeguard the vessel against radiant heat when fighting severe fires. 42.2.3 Construction The majority of offshore support vessels are conventionally built of steel with scantlings appropriate to ships of the size range 42–100 metres. Since these are typically complex and fully equipped vessels for their size, there is a higher premium on outfitting capability than steelwork capacity in the shipyard. Much use is made of modular hull sections, and increased emphasis is being placed on early outfitting of blocks before assembly to avoid installing equipment under cramped conditions later. At the design stage attention must be paid not only to global strength, but also to feeding high local loads into the structure, such as those from towing winches, deck cranes and A-frames. Working decks aft are typically stiffened to take loads of 5–10 tonnes per square metre, and on anchor handlers the aft section is often further reinforced to resist high point loads. 42.2.4 Seaworthiness Offshore support vessels in general need to be seaworthy in the widest sense of the word. Some operating areas are not subject to extreme weather conditions, but the growth of the North Sea sector has created a need for very seaworthy vessels and the benefits are being reaped now that operations extend across all Northern waters and also into open ocean conditions such as offshore Brazil. Early experience with Gulf of Mexico supply vessels in the North Sea demonstrated that they were not seaworthy enough—in particular the freeboard was not sufficient. This realisation prompted a development process, which still continues. Oil companies and field operators are demanding high standards; and the offshore support vessels are not normally the weakest link in the chain. Seaworthiness in this context can be taken to include not only basic structural integrity of the vessel and adequate stability under all permitted loading situations but also aspects such as machinery redundancy to enable the vessel to operate safely, even after specified breakdowns. Offshore support vessels must be operable in severe weather conditions. Also, the shape and layout should provide reasonable conditions for people working on the aft deck during cargo transfer or anchor handling operations 42-9 in rough sea conditions. Figure 42.10 shows the UT704 Baldur Thorungen operating in typical sea conditions. Increasingly, stress is being placed on ship motions. The majority of support vessels, such as anchor handlers, PSVs and safety standby vessels, are comparatively small, 50 to 100 meters long overall. Motions tend therefore to be inherently rather lively. Careful attention to hull design can reduce accelerations, but increased size is the easiest solution, if allowable from other points of view. Guidelines have been produced for acceptable accelerations vertically and laterally, together with roll angle, which affect the crew’s ability to work the vessel (See Section 42.2.5 for details). A distinction can be made between heavy manual work, light manual work and intellectual work when setting acceptable levels. For the multi-functional vessels that are becoming increasingly popular, other criteria come into the picture. Heave becomes a most important matter if some types of equipment are to be handled from the vessel. Although heave compensation is routinely applied to cranes and handling equipment, much can be done by selecting hull forms that give minimum heave under specified working conditions. These requirements are increasingly being written into specifications. 42.2.5 Stability Offshore support vessels are notable for the wide range of loading conditions under which they operate. On a given voyage a supply boat may well be carrying half-a-dozen different liquid and bulk cargoes in double bottoms and below decks, and also a selection of cargo on the open working deck. Figure 42.10 Offshore Service Vessels Need a High Level of Seaworthiness 42-10 Ship Design & Construction, Volume 2 Intact stability must be sufficient under all specified operating conditions. For a PSV the normal situation is to load a variety of cargoes within the allowable deadweight. It is not possible to fill all tanks and lockers and still carry full rated deck load; a choice must be made. The stability booklet for even a rather conventional platform supply vessel is a substantial document and may cover at least 20 different departure and arrival situations, including loading and discharging at sea. For an anchor handler, stability calculations become even more complex. On some of the latest AHTS there may be more than 500 tonnes of rig mooring suspended from the stern of the vessel on a winch wire running over the stern roller. Stability clearly needs to be sufficient to cope with this type of load and the situation is made yet more complicated in operations where the wire may shift from one side of the stern roller to the other. Increasingly, dynamic stability calculations are made to investigate this situation. An anchor-handling tug supply vessel is a complex compromise between conflicting requirements. Apart from supplying rigs and platforms with the liquid, powders and solids they require, the design is heavily influenced by the towing requirement. The installed power will be high for the size of vessel. The towing winch and ancillary equipment such as rope storage reels need to be accommodated and the substantial structural loads imposed by the winch catered for. A large stern roller will usually be fitted to lead wires, chains and anchors over the stern, and retractable shark-jaws and towing pins will be fitted in the aft deck to control wires and chains. To obtain a high bollard pull, large diameter propellers are needed. These will normally be installed in nozzles to give augmented thrust and the propeller immersion must be adequate under all conditions. The hull afterbody must give a good inflow of water to the propellers while, at the same time, having sufficient buoyancy to sustain heavy vertical loads on the stern roller without excessive trim. Not content with combining anchor handling and towing with platform supply, operators have tended to add other functions to produce multi-functional vessels which can also undertake a variety of sub sea work such as laying flexible cables, ploughing the sea bed for pipelines or deploying ROVs (remote operated vehicles). Some of these requirements have a strong influence on the overall design of the vessel. This is particularly the case where one or more moonpools are required, since these represent major interruptions in the structure of the vessel in the mid body. Moonpools are openings right through the hull from deck to bottom, allowing equipment or minisubmarines to be put into the water at a location on the vessel with minimum pitch roll and heave. Resistance may be increased and attention must be paid to the behavior of the water in the moonpool with the vessel at rest to ensure that turbulence does not hinder operations. Internal baffling structure is fitted in the moonpool to reduce water heave motion relative to the vessel as shown in Figure 42.11. In some vessels a flap is fitted to control water flow across the moonpool opening, and this can largely eliminate the added resistance. Moonpools may go hand in hand with flexible cable laying equipment mounted on deck, which must also be taken into account for its effect on stability. The same considerations apply to stern or side mounted A-frames, which bring not only the matter of their own weight but also the effect of suspended loads on ship stability. Unlike many classes of ship, some of the crew of an offshore support vessel may have to work on the exposed weather deck in bad weather. Their safety impinges on the overall design of the vessel. Freeboard must be sufficient to avoid the working deck being swept by seas while bow shape and superstructure should give a reasonable protection from spray. Rails and bulwarks around the working deck are a compromise. Rails prevent cargo shift and damage to deck valves and fittings. They also provide a refuge for crew working on deck. Rails may be tubular, fully plated or a combination of them both. Tubular cargo rails keep the deck cargo in place and offer the crew a refuge from cargo and wires under tension but provide little in the way of weather protection. Plated bulwarks, as can be seen in Figure 42.12. give good protection against spray but will trap potentially dangerous Figure 42.11 Water Motion Baffling in Moonpool Chapter 42: Offshore Support Vessels 42-11 Figure 42.12 Cargo Rails and Plate Bulwarks quantities of water on deck unless fitted with adequate freeing ports. Freeing ports where side plating extends above the main deck are the subject of strict classification society requirements. Where plated protection is used, it is normal to provide alcoves at intervals on each side of the deck, which offer shelter and protection for the deck crew. Support vessels typically operate close to rigs and platforms, often in bad weather. This has a strong influence on design. Propulsion and manoeuvring systems require a high level of integrity, also redundancy, to prevent single failures from crippling the vessel and potentially hazarding a platform. If by chance a support vessel suffers structural damage then its own survival is important. At the same time steps must be taken to minimize pollution damage. Substantial quantities of bunkers and fuel for rigs may be on board, together with other substances. For the North Sea and many other geographical areas, double hull construction is mandatory for damage stability under IMO469. The regulations call for 0.75 m between outer and inner hulls but in practice a figure of about 1 m is often selected to allow for access for inspection and painting. 42.2.6 Ship Motions Criteria, such as that in Table 42.I, are increasingly being set for acceptable motions in a seaway. These may be general, or specific to one operating area such as the North Sea. Different criteria may be chosen for different locations on the vessel, such as intellectual work on the bridge, light manual work at the aft perpendicular, and heavy manual work at a quarter of the ship’s length from aft. Proprietary software may then be used to derive curves for operating limits. Many offshore vessels will have to operate at zero speed using dynamic positioning at any heading relative to wind and sea. Where roll reduction tanks are fitted these will be included in the calculations. Normally at least two loading conditions will be considered; ballast arrival and fully loaded departure. Others may be included where they are relevant to the vessel’s operating profile. 42-12 Ship Design & Construction, Volume 2 TABLE 42.I Typical Criteria (rms Values) Light manual work Heavy manual Intellectual work work Vertical acceleration 0.20g 0.15g 0.10g Lateral acceleration 0.10g 0.07g 0.05g 6 degrees 4 degrees 3 degrees Roll angle 42.2.7 Station Keeping As noted, offshore support vessels frequently need to keep station at varying headings to wind and sea. Hull form and the position and size of the superstructure affect the balance of the vessel and the size of thrusters required to hold position under specified conditions. Forces acting on the ship include wave drift forces, wind force and currents. In calculating wave drift forces from irregular waves, a JONSWAP spectrum with a constant peakedness parameter Y is normally used. The spectrum is defined by significant wave height and peak period. Various programs are available to simplify calculation. As an example, DYNACAP developed by Marintek in Norway evaluates static holding power capacity and generates capability plots and listing of thruster utilisation. The capability plots are polar plots of the average environmental forces relative to the maximum holding power of the thrusters for different directions of the external forces. In the holding power capability analysis, a fixed heading of the vessel is assumed, that is the vessel is not allowed to adjust its heading to minimise external and yawing moments. The directions of current, wind and waves can be rotated around the vessel. sitioning to one meter or better can enhance the accuracy. Control of the vessel’s heading and position is nowadays automatic under computer control but manual intervention is possible. By suitable manipulation of bow thrusters, stern thrusters, controllable pitch propellers and high lift rudders the vessel can be held at the given geographical location and the required heading even under severe conditions. Classification societies and national authorities issue notations which specify the limiting wind and sea conditions and also the degree of system redundancy, both of the computer control and to cover defects in equipment and damage to the vessel which puts compartments out of action. Table 42.II gives a brief summary showing how notations from leading classification societies compare. 42.2.9 Machinery Arrangement Propulsion requirements for offshore support vessels vary widely with the mission of the vessel. There is no single best solution and normally several different machinery arrangements will have to be evaluated at the design stage. With the exception of fast light Gulf of Mexico-type crew boats, which tend to favor high-speed diesels, the vast majority of vessels have a twin-screw arrangement with compact medium speed diesel engines, such as the Bergen TABLE 42.II Dynamic Positioning Notation IMO DNV-T LRS DP (CM) ABS DPS-0 Position control – manual Heading control – automatic Class 1 AUT/S P (AM) DPS-1 Position control – auto/manual Heading control – auto/manual 42.2.8 Dynamic Positioning Offshore vessels required to keep station accurately will be fitted with a dynamic positioning system. This combines position fixing linked to the ship’s propulsion and maneuvering system such that the selected position and heading can be maintained under specified environmental conditions. Position may be fixed by various means, including satellites, hydro-acoustic transmitters, laser systems and so on, singly and in combination. Increasingly the system of choice is the differential global positioning system (DGPS). The system provides a high level of accuracy. The satellite system itself provides a position readout. Using a shore station signal, giving DGPS instead of GPS, and po- Class 2 AUTR DP (AA) DPS-2 Position control – auto/manual Heading control – auto/manual Including single fault condition. Two computers. Class 3 AUTRO DP (AAA) DPS-3 Position control – auto/manual Heading control – auto/manual Including single fault condition and loss of compartment through fire or flood. Two computers, plus fire safeguarded backup. Note: each notation includes specified maximum wind and sea conditions. Chapter 42: Offshore Support Vessels BV12 shown in Figure 42.13. It produces 7200 bhp at 750 rpm from twelve 320 mm bore cylinders. Early generations of PSV and AHTS experimented with engine location but now the general rule is to locate the main engines well forward in the vessel under the superstructure, leaving the whole mid body of the vessel clear for cargo tanks and the working deck unobstructed by engine room accesses or uptakes. This provides a balanced and effective layout at the expense of long shaft lines. US Gulf OSVs often have their engine rooms aft to minimise shaft length and run the engine exhausts forward, either under deck in a centerline passage or above deck along the edges. A platform supply vessel typically has a relatively straightforward propulsion system, one popular modern design, the UT745 for example, is 82.5 m long with a deadweight of about 4200 tonnes, a fully loaded speed of 14 knots and an economic speed of about 13.5 knots. Two medium speed engines will normally propel this design, each of about 3600bhp, with the option of two units each of 4800hp. The engine room is forward, and long shaft lines and reduction gearboxes transmit the power to two open water controllable pitch propellers. A high lift rudder is located behind each propeller. 42-13 Figure 42.14 shows a section through a shaft line with engine, coupling, gearbox with power take-off (pto) for a shaft generator, shaft and controllable pitch propeller. High lift flap rudder and rotary vane steering gear are also indicated. The combination of CP propellers and flap rudders gives good manoeuvrability and this is enhanced by two electrically driven 800 hp transverse tunnel thrusters in the skeg aft, a 1200 hp tunnel thruster forward and a swing up azimuth thruster located forward under the superstructure and also rated at 1200 hp. Retractable azimuth thrusters at the bow are popular because they also provide an independent propulsion system as required by the safety standby regulations. In addition to its normal supply duties, the UT745 may if required have facilities for 300 survivors. An AHTS presents the designer with a bigger propulsion problem. Towing performance and thus bollard pull is vital. Both the propulsion machinery and the hull lines must be selected to give the best possible results. The issue is complicated by the fact that towing is only one role, and that for supply duties only a fraction of the total installed power is required, Figure 42.15. It is, therefore, common to choose multi-engine installations, for example four engines on two shafts, to give op- Figure 42.13 Medium Speed Diesel Engine 42-14 Ship Design & Construction, Volume 2 Figure 42.14 Typical Propulsion Package with Main Engine, Reduction Gear, Shafting, C.P. Propeller, Flap Rudder and Steering Gear timum performance and economy under different operating conditions. Four engines of equal power, or a father and son arrangement in which two engines of different powers can be clutched to a twin input/single output gearbox, may be used. For full output, all four engines are engaged. For other design conditions either the two larger father engines can be used or the smaller son units, giving extreme flexibility. It is very typical for the vessel’s electrical load to be met by shaft generators driven from power take-offs on the main gearboxes, thus avoiding the need to run auxiliary generator sets. Diesel electric propulsion can be attractive for some classes of offshore support vessel. Here a number of diesel generator sets are operated in parallel, supplying propulsion power and the electrical load. Propellers are turned by electric motors through an electronic speed control system. Great strides have been made in recent years in efficient solid-state electronic speed control systems and in power management, although the idea of diesel electric propulsion for ships is as old as the marine diesel engine. Azimuthing thrusters for main propulsion come in many forms. For some applications direct mechanical transmission is attractive. The majority of offshore vessels to date have, however, used thrusters as part of a diesel electric propulsion system, with electric propulsion motors in the hull coupled to the input gears of the thrusters. Conventional mechanical azimuth thrusters have pushing propellers aft of the lower gearhouse, but types with contra-rotating propellers are likely to show better efficiency, and a type with a pulling propeller ahead of a streamlined lower housing demonstrates a high efficiency and requires less steering to maintain a course (Figure 42.16). An alternative is the pod thruster in which the electric motor is incorporated in the lower housing, turning a pulling propeller. All these units offer vectored thrust, lending themselves to DP operation, and if the hull is suitably designed the flow of water to the propellers is smoother, an advantage from the point of view of efficiency and reduced noise. Diesel electric propulsion can be attractive for offshore support vessels where operation is required in a number of different modes, or where the electrical load for equipment is a substantial percentage of the required propulsion power. Operating the engines on the power station principle enables the number of engines running at any given time to be tailored to the load for maximum fuel economy. In the pursuit of reduced exhaust emissions, a few PSVs have started using liquefied natural gas as fuel, but employing dual fuel engines that can also burn diesel fuel if gas is not available. Propeller design is important for all OSVs but for AHTS bollard pull is the main consideration. At the design stage, the hull proportions selected must allow large propellers to be adequately immersed. Increased towing power is available if nozzles are fitted to the propellers. A nozzle of NACA19A section and a fore and aft length equal to half the propeller diameter is a good all round compromise between lift and drag. The designer has to weigh the relative merits of a nozzle supported clear Next Page Chapter 42: Offshore Support Vessels 1. 2. 3. 4. 5. Main engine (each 5300 kW at 750 rpm) Reduction gear, 750/175 rpm Controllable pitch propeller in nozzle High lift flap rudder Shaft generator driven by gearbox PTO, 2420 kVA/1200 rpm 6. 7. 8. 9. 42-15 Flexible coupling Flexible coupling Step-up gear, 750/1500 rpm, rated at 2000 kW Fire pump 3600 m3/h, 165 m head Figure 42.15 Typical Machinery Layout for a Twin Engine AHTS (Rolls-Royce UT722) with Conventional Shaftlines of the hull, which allows circulation around the entire circumference of the nozzle but increases draft for a given propeller diameter, or raising the nozzle and integrating its upper portion into the hull thus trading efficiency for reduced draft. In each case it is important to have sufficient propeller immersion, and as a guide the vertical distance from the top of the nozzle to the local water surface should be at least half the propeller diameter. Improved propeller design procedures and better blade forms have raised propeller efficiencies in recent years. For older vessels it may be worth considering fitting new CP propeller blades. It may be feasible to optimize propellers for a particular operating condition, but for many offshore support vessels compromise is necessary. In particular, multi-functional vessels need to be checked for off-design conditions, one example is a vessel that may keep station using a dynamic positioning system and controllable pitch propellers. Here propellers may operate for long periods around the zero pitch position. One class of offshore vessel where correct propeller design is of the utmost importance is the seismic research ship. Hydro-acoustic noise from the vessel degrades the performance of its sensors. A typical requirement is that at 5 knots the pressure changes in the water measured 200 m aft of the vessel and 10 m below the surface should not be more than 10mu bar. To achieve this requires close attention must be paid to propeller design and to propeller/hull interaction. In general terms, propellers with a low tip speed will be selected and profile and pitch distribution chosen to give the highest efficiency at the selected operating speed. The hull form must be such that inflow to the propellers is very uniform and there should be good clearance between propellers and hull.
 0
0
Anuncio
Documentos relacionados





Descargar
Anuncio
Añadir este documento a la recogida (s)
Puede agregar este documento a su colección de estudio (s)
Iniciar sesión Disponible sólo para usuarios autorizadosAñadir a este documento guardado
Puede agregar este documento a su lista guardada
Iniciar sesión Disponible sólo para usuarios autorizados