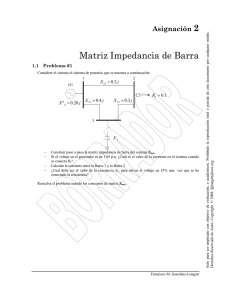
UNIVERSIDAD TECNOLÓGICA DE LOS ANDES FILIAL ANDAHUAYLAS FACULTAD DE INGENIERIA ESCUELA PROFESIONAL DE INGENIERIA CIVIL “APLICACIONES DE ECUACIONES DIFERENCIALES EN INGENIERÍA CIVIL” Docente: Alejandro Rumaja Alvitez. Curso: Ecuaciones Diferenciales. Integrantes del grupo: - Alarcón Poluco Cristian André. - Huaraca Torres Jenifer - Flores Pumapillo Nataly - Anaya Porras Diego Orlando Ciclo: IV ANDAHUAYLAS – PERÚ– 2021 DEDICATORIA Dedicamos este trabajo monográfico a Dios y a nuestros padres. A Dios porque ha estado con nosotros en cada paso que damos, cuidándonos y dándonos fortaleza para continuar y a nuestros padres quienes a lo largo de nuestras vidas han velado por nuestro bienestar y educación siendo nuestro apoyo en todo momento. Depositando su entera confianza en cada reto que se nos presentan sin dudar ni un solo momento en nuestra inteligencia y capacidad. Los amamos. Es por ello que seguiremos luchando hasta lograr nuestras metas y objetivos. AGRADECIMIENTOS Agradecemos al señor Pepito Alarcón y su familia por recibirnos en su humilde hogar y permitirnos realizar nuestros trabajos con comodidad y estadía. Y brindarnos los materiales necesarios para culminar con éxito y satisfacción la presente labor monográfica. ÍNDICE CONTENIDO INTRODUCCIÓN. ............................................................................................................1 CAPÍTULO I 1. APLICACIONES DE ECUACIONES DIFERENCIALES EN LA INGENIERÍA CIVIL . .....................................................................................................................2 1.1. FLEXIÓN DE UNA VIGA EN VOLADIZO PARA PEQUEÑAS FLEXIONES. ....................................................................................................................2 1.2. ESTUDIO DE LA FLEXIÓN DE UNA VIGA EN VOLADIZO. .....5 1.3. CÁLCULO NÚMERICO. ..................................................................8 1.4. CÁLCULO DE Φ0. .............................................................................8 1.5. CÁLCULO DE LAS COORDENADAS (X/L, Y/L) DE CADA PUNTO DE LA BARRA DEFORMADA. .............................................................................9 1.6. APROXIMACIÓN DE PEQUEÑAS FLEXIONES. .......................11 1.7. LÍMITE DE LA APROXIMACIÓN DE PEQUEÑAS FLEXIONES ...........................................................................................................12 2. BIBLIOGRAFÍA .....................................................................................................15 3. ANEXO ...................................................................................................................16 INTRODUCCIÓN El descubrimiento de Newton y Leibniz en el siglo XVII sobre las ideas básicas del cálculo integral fue crucial para el avance que sufrieron las matemáticas. Y más importante fue, si cabe la relación que encontraron entre el cálculo integral y el diferencial ya que consiguieron fundirlos en uno solo. Una de las aplicaciones de este descubrimiento fue la física aplicada a la ingeniería. En el presente trabajo se pretende dar a conocer las diversas aplicaciones de las ecuaciones diferenciales en la ingeniería civil es por ello que es utilizado en muchos casos, para describir y explicar las leyes del universo; los modelos matemáticos empleados permiten comprender los cambios que implican innumerables fenómenos físicos, y dichos cambios solo pueden explicarse por medio de ecuaciones que relacionan cantidades que cambian estas se denominan ecuaciones diferenciales: es una ecuación que relaciona una función desconocida y una o más de sus derivadas, con esto decimos que una ecuación diferencial ordinaria es una ecuación en la cual aparecen derivadas o diferenciales de una variable, que denominamos dependiente, la cual es función de otra única variable, llamada independiente con lo cual, encontrar la solución de una ecuación diferencial implica encontrar una función que reemplazada en la ecuación original junto con sus derivadas perita llegar a una identidad. 1 CAPITULO I 1. APLICACIONES DE ECUACIONES DIFERENCIALES EN INGENIERÍA CIVIL Las ecuaciones diferenciales son muy interesantes en cuanto a la posibilidad que presentan para indagar sobre variedad de problemas de las ciencias físicas, biológicas y sociales. A partir de la formulación matemática de distintas situaciones se describen procesos reales aproximados. Dentro de los diversos campos de acción de la ingeniería civil, una de las múltiples aplicaciones de ecuaciones diferenciales está relacionada con el estudio de las flexiones. 1.1. FLEXION DE UNA VIGA EN VOLADIZO PARA PEQUEÑAS FLEXIONES: Una viga o una barra delgada son sólidos homogéneos e isótropos cuya longitud es grande comparada con las dimensiones de su sección trasversal. Cuando una viga flexiona debido a las fuerzas exteriores que se aplican, existen algunas partes de la viga que se acortan y hay otras zonas que se alargan. Pero hay una línea, denominada eje neutro, que no se acorta ni se alarga. Este eje se encuentra en el centro de gravedad de la sección trasversal. Se usará una barra empotrada de un determinado material, de longitud L, de anchura a y de espesor b. Se fijará uno de sus extremos y se aplicará una fuerza en su extremo libre. Mediremos el desplazamiento del extremo libre y(L) o flecha en función de la fuerza aplicada F, comprobando su relación de proporcionalidad, mientras que la flexión de la barra sea pequeña. A continuación, examinaremos la teoría de la flexión de una viga en voladizo en detalle, calculando el desplazamiento de su extremo libre cuando se aplica una fuerza en dicho extremo que produce una flexión considerable. Este ejemplo, nos permite practicar con procedimientos numéricos aplicados al Cálculo de la raíz de una ecuación. 2 Integral definida. Supongamos que La barra tiene una longitud L mucho mayor que las dimensiones de su sección trasversal, y que la deformación debida a su propio peso es despreciable. Que la sección de la barra no cambia cuando se dobla. Cuando el espesor de la barra es pequeño comparado con el radio de curvatura, la sección trasversal cambia muy poco. En estas condiciones es aplicable la ecuación de Euler-Bernoulli que relaciona el momento flector M de la fuerza aplicada y el radio de curvatura ρ de la barra deformada El radio de curvatura de una función y(x) es Para pequeñas pendientes (dy/dx)2≈0 Si despreciamos el peso de la propia barra, el momento de la fuerza F aplicada en el extremo libre, respecto del punto P (x, y) es M=F(xf-x)≈F(L-x) 3 Que integramos dos veces con las siguientes condiciones iníciales x=0, y=0, dy/dx=0. El desplazamiento yf del extremo libre x=L es proporcional a la fuerza F aplicada Y es el módulo de Young del material I se denomina momento de inercia de la sección trasversal respecto de la fibra neutra Se considera que la aproximación de pequeñas flexiones: el desplazamiento y del extremo libre de la barra, es proporcional a la fuerza F aplicada, produce resultados aceptables hasta un cierto valor del parámetro a dimensional α<0.375, (véase al final del siguiente apartado) o bien, hasta un valor máximo de la fuerza aplicada Fm=2Y·I·α/L2 Ejemplo: Sea L=30 cm=0.3 m, la longitud de la barra. Sea b=0.78 mm=0.00078 m, el espesor de la barra. La anchura a=0.03 m está fijada por el programa interactivo y no se puede cambiar. Elegimos como material, el Acero. Después de realizar la experiencia. La pendiente de la recta que relaciona la desviación del extremo libre y(L) con la fuerza aplicada F en dicho extremo es m=3.683 cm/N=0.03683 m/N 4 El momento de inercia I vale Dada la pendiente (coeficiente de proporcionalidad de F) calculamos el módulo de Young Y 1.2. ESTUDIO DE LA FLEXION DE UNA VIGA EN VOLADIZO: Consideremos una barra delgada de longitud L en posición horizontal, empotrada por un extremo y sometida a una fuera vertical F en el extremo libre. Determinaremos la forma de la barra y las coordenadas (xf, yf) del extremo libre para grandes flexiones de la barra. Supongamos que: La barra tiene una longitud L mucho mayor que las dimensiones de su sección trasversal, y que la deformación debida a su propio peso es despreciable. Que la sección de la barra no cambia cuando se dobla. Cuando el espesor de la barra es pequeño comparado con el radio de curvatura, la sección trasversal cambia muy poco. En estas condiciones es aplicable la ecuación de Euler-Bernoulli que relaciona el momento flector M de la fuerza aplicada y el radio de curvatura ρ de la barra deformada 5 Donde Y es el módulo de Young del material e I es el momento de inercia de la sección trasversal respecto del eje neutro. El radio de curvatura: ρ=ds/dφ El momento flector M de la fuerza F aplicada en el extremo libre de la barra respecto del punto P (x, y) es M=F(xf-x) Derivando con respecto a s, y teniendo en cuanta que cosφ=dx/ds Para determinar φ(s) se resuelve la ecuación diferencial con las siguientes condiciones iníciales: Para obtener una solución de la ecuación diferencial, multiplicamos por dφ/ds la ecuación diferencial 6 La constante de integración la determinamos a partir de las condiciones iníciales especificadas anteriormente: La Longitud L de la barra y las coordenadas x e y de cada uno de los puntos de la misma se obtienen: Dada la fuerza F aplicada en el extremo libre de la barra y conocida la longitud L de la barra, se resuelve la primera ecuación para calcular el ángulo φ0, que forma la recta tangente a la barra en su extremo libre con la parte negativa del eje horizontal X Una vez que se conoce este ángulo φ0, se calcula la abscisa x dando valores al ángulo φ en el intervalo (0, φ0) El cálculo de la ordenada y es más complicado, ya que para cada valor del ángulo φ hay que hallar una integral definida en el intervalo (0, φ) empleando procedimientos numéricos. 7 1.3. Cálculo numérico Las ecuaciones anteriores las podemos expresar Donde α es un parámetro a dimensional que engloba las características geométricas de la barra, del material del que está hecha, y de la fuerza aplicada en su extremo libre 1.4. Cálculo de φ0. Empezamos con la primera ecuación que nos determina el ángulo φ0 que forma la recta tangente a la barra en su extremo libre con la parte negativa del eje horizontal X, tal como se ve en la figura: Requiere dos pasos: 1. Hallar la integral 8 2. Calcular la raíz de la ecuación f(φ0)=0 La integral se puede expresar en términos de la suma de dos integrales elípticas de primera especie, haciendo cambios de variable. El primer cambio es θ=φ+π/2 El segundo cambio de variable es Finalmente, calculamos la raíz de la ecuación 1.5. Cálculo de las coordenadas (x/L, y/L) de cada punto de la barra deformada El cálculo de x/L no reviste dificultad alguna. Conocido φ0, se calcula x/L para cada ángulo φ en el intervalo (0, φ0). La posición xf del extremo libre es 9 El cálculo de y/L es más problemático. Conocido φ0, se determina la ordenada y/L para cada ángulo φ en el intervalo (0, φ0) calculando la integral definida, por el procedimiento numérico de Simpson Cuando φ→φ0 el denominador de la integral tiende a cero. El ordenador no calcula correctamente la ordenada yf/L del extremo libre de la barra cuando φ=φ0. Para solucionar este inconveniente, empleamos el procedimiento de interpolación que se muestra en la figura. Calculamos las coordenadas (x/L, y/L) para el ángulo φ=φ0-Δφ, siendo Δφ un ángulo pequeño. Calculamos la abscisa xf/L para el ángulo φ0. La ordenada yf/L se obtiene resolviendo el triángulo rectángulo de la figura 10 1.6. Aproximación de pequeñas flexiones Para pequeñas flexiones cuando el ángulo φ0 es pequeño. Sustituimos senφ≈φ y escribimos la ecuación que calcula φ0. El resultado es φ0=α Las coordenadas (x, y) de cada punto de la barra se aproximan a Para el extremos libre de la barra, cuando φ= φ0=α, xf=L, lo que implica que en la aproximación de pequeñas flexiones, no hay desplazamiento horizontal del extremo libre de la barra. La ordenada y la podemos aproximar Integrando por partes y después de hacer algunas simplificaciones obtenemos la siguiente expresión Las coordenadas x e y, las hemos expresado en función del parámetro φ, eliminando el parámetro obtenemos la función y=f(x) que describe la flexión de la barra cuando se aplica una fuerza F en su extremo libre. 11 Para el extremos libre de la barra, cuando φ= φ0=α, x=L, 1.7. Límite de la aproximación de pequeñas flexiones En la figura, se muestra la desviación y/L del extremo libre de la barra en función del parámetro a dimensional α. En color rojo, los resultados del cálculo, empleando procedimientos numéricos, descrito en el apartado anterior En color negro, la recta y/L=2α/3, aproximación de pequeñas flexiones Podemos considerar, que la aproximación lineal produce resultados aceptables hasta un cierto valor límite del parámetro αm o bien, hasta un cierto valor máximo de la fuerza aplicada Fm en el extremos libre de la barra 12 Ejemplo: Sea una regla de acero de longitud L=30 cm, sección rectangular a=3.04 cm, y b=0.078 cm. El módulo de Young es Y=2.06·1011 N/m2 El momento de inercia I vale Cuando aplicamos en el extremo libre de la barra una fuerza tal que α=0.25, es decir Aplicando la aproximación de pequeñas flexiones En la aproximación de pequeñas flexiones xf≈L, no hay desviación apreciable en sentido horizontal y la desviación en sentido vertical yf es proporcional a la fuerza F aplicada en el extremo libre. Cuando aplicamos en el extremo libre de la barra una fuerza tal que α=1.25, es decir Aplicando la aproximación de pequeñas flexiones 13 En la aproximación de pequeñas flexiones deja de ser válida ya que hay una desviación apreciable en sentido horizontal y la desviación en sentido vertical yf ya no es proporcional al a la fuerza F aplicada en el extremo libre. 14 2. BIBLIOGRAFIA: - Feynman, Leighton, Sands. The Feynman Lectures on Physics V-II. Edt. Fondo Educativo Interamericano, págs. 38.15-17. - Beléndez T., Neipp C., Beléndez A., Flexión de una barra delgada empotrada en un extremo: Aproximación para pequeñas pendientes. Revista Brasileira de Ensino de Física. 24 (4) Dezembro 2002, págs, 399- 407. - Beléndez T., Neipp C., Beléndez A., Large and small defections of a cantilever beam. Eur. J. Phys. 23 (2002) pp. 371-379 15 3. ANEXO 16