C)
()
()
()
CAPíTULO 15
(j
DISEÑO,
SELECCI6N
y ESTUDIO DE ELEMENTOS NEUMÁTICOS
()
)
(
()
MÉTODO
.()
PASO A PASO
Ij
()
()
(J
(,
)
1)
()
')
1. INTRODUCCIÓN
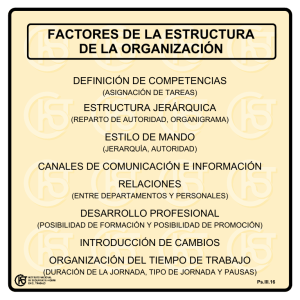
En el método de cascada, el dispositivo de mando está formado por un conjunto de válvulas de memoria conectadas en serie, de modo que la toma de presión es única para todo el dispositivo. El aire circula a través de todos o parte de
los distribuidores para llegar a la salida correspondiente; lo que supone una pérdida de presión, que origina una menor velocidad de circulación y el consiguiente retraso en las órdenes de mando,
Ij
~J
ij
'.J
)
"
~)
1)
!,J
"
)
(
)
')
:,
)
,)
()
Por dicho motivo, el método de cascada no se suele utilizar cuando el dispositivo de mando exija más de tres distribuidores, o lo que es igual, cuando el
número de salidas del mismo deba ser superior a cuatro.
El método
paso a paso da mayor rapidez al mando,
pues el montaje
de las
válvulas de memoria se realiza en paralelo, de modo que cada válvula se alimenta directamente de la red. Sin embargo, para el mismo número de salidas, el método paso a paso exige una válvula de memoria más que el método de cascada.
Para la formación
pasos:
del dispositivo
de mando
conviene
seguir los siguientes
10 En primer lugar se determina el número de salidas que debe tener el dispositivo, El número de válvulas de memoria del mismo es igual al número de
salidas, de modo que cada válvula proporciona una salida.
20 Todos los distribuidores en posición inicial se encuentran cerrados, excepto el que da presión a la última salida, que en dicha posición se encuentra abierto.
323
j
\
NEUMÁTICA INDUSTRIAL DISEÑO, SELECCIÓN Y ESTUDIO DE ELEMENTOS NEUMÁTICOS
MfTODO PASO A PASO
3° La salida (So)borra la válvula que da la salida anterior (SO-I).
1 o Dividir la secuencia en grupos' de
d
máximo número de letras y n~ se r~pOto que cada uno de ellos contenga el
I a ninguna letra en el grupo.
La Figura 15.1 representa el dispositivo de mando para cuatro salidas.
____~----------------------------------------~-SI
----+---~----~----------------------~~
-----+----r-----_+----~----~----------------_+I-S.
____-+
I~-----+----~I
------+---~I ~------+I-S.·
I
I
I
I
Ii
Ií
I I
I
I
I
I
I
I
I
I
rI
I
I
I
1 el
I
I
I
I
,
..J
J
I
,
I
,
,
I
i ea
i e~
1 e.
Figura
----~------------T-~
-----+--~----T-----~'_~.
I
I
: e.
J
I
I
J
rI
I
I
~ ea
Figura
3
.
",'.
~.~bl·
b
0
2 El dispositivo de mando dispone de tres '1 I
.
las cuales suministra una salida En la va ~~ as. ~e. memona, cada una de
encuentran cerradas, excepto la Última posroon IniCial tod~s las válvulas se
se
borra la salida Sn.1.De este modo resultiU~ d enc.u.entra abierta. La salida So
e ISpOSltlVOde la Figura 15.3.
15.1
El método paso a paso no se puede utilizar cuando el circuito de mando exija un
dispositivo con dos salidas, ya que una salida borra la válvula anterior por lo que
ésta no se puede activar mediante la entrada correspondiente, ver Figura 15.2.
r
I
I
I
Ls
S2
I
I
I
-1
.J
s, /,
PM-~A+ jA- B+ /u_
::::::j::::t, ::==----¡---~==============t=~
------lr---r,--------i-~=r,
:::::::;==::::í=~*
I
I
J
I
,
I
..J
Figura
J
15.3
3° Se dib'ujan los cilindros y los distribuido
.
.
cuenta que éstos se alimentan directam~~~ q~e /os gdoblernan, teniendo en
. vo de mando, Figura 15.4.
e e a re y nunca del dispositi-
j
.J
15.2
)
.J
B
2. PASO A PASO MíNIMO
)
El objetivo del método paso a paso es evitar los problemas de simultaneidad de
señales, anulando éstas en el momento que han cumplido su misión. Para ello
se puede recurrir a un dispositivo que tenga tantas salidas como órdenes exija
la secuencia (paso a paso máximo); o dividir la secuencia en grupos, de modo
que cada uno de ellos abarque el máximo número de letras y que en cada grupo
no se repita ninguna letra (paso a paso mínimo).
.J
)
)
)
J
Alimentando los finales de carrera de un mismo grupo, de la misma salida del
dispositivo de mando, no habrá problemas de simultaneidad de señales, pues
en cada grupo no existen órdenes contrarias y el dispositivo de mando sólo dispone de presión en una salida y todas las demás se encuentran borradas.
)
)
Figura
15.4
)
Para una mejor comprensión del dispositivo de mando, se desarrollan los pasos
necesarios para la resolución de la secuencia
A+ A- B+ B-.
)
.J
.J
325
'I}
M~TODO PASO A PASO
NEUMÁTICA INDUSTRIAL. DISEÑO, SELECCiÓN Y ESTUDIO DE ELEMENTOS NEUMÁTICOS
1)
,)
,)
1)
j
I.J
)
1)
'-)
( )
(,~
'j
.J
40 A continuación
se comienza a resolver la secuencia fase por fase. Para ello el
final de carrera (bo), que es el que certifica el final de la secuencia anterior, y
las condiciones de inicio (en nuestro caso un pulsador manual), deberán
montarse en simultaneidad para poder arrancar la secuencia.
6° La
primera orden del grupo (S2 ) se toma directamente
15.7.
Como la orden (a-) es la primera orden del grupo (S,) se toma directamente
f1f'
b,
I
~~
de
dicho grupo, Figura 15.5.
b,
I
o,
o,
I
0-
Como (bo) pertenece al grupo (53) se debe alimentar de dicha salida, y como además
es el último final de carrera del grupo (S3) , debe cambiar la presión a la salida (S,).
,
~~~~~
:,
,
,-,,
I
de dicha salida, Figura
J
, s.
'''
:
.J
,
I
I
,
--------~,--~----------------------~~
-----------+--~----~-------------'~~
~---------+--+-----~--~--~----~~.
ij
1)
Figura
j
Figura
;)
'.J
'.J
)
J
,)
\
b,
I
cambiar la presión al grupo (52), Figura 15.6.
~.
o,
I
r.
7° Al finalizar el movimiento (A-) se
ti
.
encuentra pisado. Como (ao) ertene iva (ae), que en posición de reposo se
la orden siguiente (b+), Fi9U~ 15.8~ce al ,grupo (S2) toma presión de él y da
15.5
50 Al finalizar el movimiento (A+) se debe cambiar de grupo, pues la siguiente
orden ya pertenece a la salida (S2). Como (al) pertenece al grupo (S,) se alimentará de él, y pilotará la segunda válvula del dispositivo de mando para
J
\)
15.7
~'
,
I ' .
b,
I
, s,
~
s..
, s,~
, s,·
.
)
J
'j
,)
(
)
i)
J
Z.J
~ 'L._._
Figura
Figura
15.8
15.6
327
)
IVltlUUU
NEUMATICA
INDUSTRIAL..DISEÑO,
rf\JU A n-\)U
SELECClON y ESTUDIO DE ELEMENTOS NEUMAncos
80 Cuando (B) pasa a (B+), pisa el final de carrera (b.), que se alimentará del
grupo (S,) al que pertenece, y al ser el último final de ca~rera del grupo (S,),
dará la orden para que la presión cambie algrupo (53), Figura 15.9.
b,
I
,
,,
,,
e.
..J
r,
s,
S.
,, s,
,,
I
s. •
)
-..J
_.J
\~
,
I
,
I
J
,,
,,
,,
.J
S,
s,
J
1
,,
r-
Del análisis de la Figura 15.10, se observa que los finales de carrera que cambian la presión de grupo, se alimentan de la salida anterior (5n.')' y dan presión
a la salida siguiente (Ss), lo que s¡"gnifica que para que haya presión en la salida
(5n), tiene que haber presión en la salida anterior (Sn.')' Además, el aire tiene que
recorrer el camino existente entre la toma de presión de la válvula que alienta
la salida (5n.') y el pilotaje de la válvula que suministra la salida (Ss). Para ganar
rapidez en el mando y no perder seguridad en el mismo, los finales de carrera
que cambian la presión de grupo se alimentan directamente de la red, y se montan en simultaneidad con la salida anterior, Figura 15.11, siendo éste el montaje que se lleva a la práctica.
)
.J
)
.J
1')
Figura
J
15.9
Figura
9° Para finalizar la secuencia la orden (b-), por ser la primera de su grupo, se
toma directamente de la salida (53), Figura 15.10.
A
•
a,
a"
I
~~
I
I
I
I
I
r-
-r
I
I
I
I
I
I
b.
b,
I
:
r:
I
I
So
I
I
r
I
I
I
'J
)
)
3. PASO A PASO MÁXIMO
I
I
I
I
I
)
\ )
I
~ a"
..J
El inconveniente que tiene el método paso a paso mínimo, es que si con el
dispositivo anterior, se quisiera gobernar otra secuencia de cuatro movimientos como (A+ A- A+ A-), no se podría realizar, ya que para ello se necesitan cuatro salidas. Este inconveniente se salva mediante el método paso a
paso máximo.
,
I
.,
'J
15.11
J
t
Con este método, el dispositivo de mando se diseña para que cada fase de la
secuencia disponga de su propia salida. De este modo se puede cambiar de
secuencia sin tener que modificar el dispositivo de mando, siempre que la nueva
secuencia disponga de un número de fases igualo inferior a la secuencia para
la que fue diseñado.
De este modo el dispositivo de mando con las entradas y salidas correspondientes a la secuencia (A+ A- B+ B-) sería el de la Figura 15.12.
Figura
15.10
329
J
1)
,)
)
NEUMÁTICA
INDUSTRIAL. DISEÑO"SELECClON
.'
'
y ESTUDIO DE ELEMENTOS NEUMÁTICOS
IVltlUUUrA~U fI rfl)U
)
,a+
J
I
, aI
)
,)
)
)
,)
,)
Figura
J
()
,)
15.12
Figura
Si con dicho dispositivo se quiere realizar la secuencia (A+ B+ B- A-), sólo se tendrán que cambiar las órdenes de salida y las entradas correspondientes, como
se muestra en la Figura 15.13.
)
)
I
)
Lo que demuestra la superioridad del método paso a paso máximo respecto del
mínimo, por lo que en la práctica es el que más se suele utilizar.
Sin embargo la mayor ventaja del método paso a paso máximo radica en la
mayor uniformidad del sistema. Así en la secuencia
')
"
15.14
s,
S2
S3
S4
,.---.A+ /A- /B+ /B\PM
~
J
BJao
~ b,
V
;If bo
<r.::
resuelta por el método paso a paso máximo, todos los finales de carrera se alimentan directamente de la red y todas las órdenes se toman directamente del
grupo al que pertenecen, mientras que en la misma secuencia
Figura
15.13
PM---+A~/A- ~+
~~b,.
1)
1)
J
)
Si el número de fases de la nueva secuencia es inferior al de la secuencia primera, como por ejemplo
A+B-ABr el dispositivo
de mando de aquella sería igualmente útil, conectando
las órdenes de salida y las entradas correspondientes como se muestra en la
Figura 15.14.
IB~3
bo
resuelta por el método paso a paso mínimo, ao se alimenta de grupo S2 y la
orden b+ se toma de dicho grupo a través de ae.
4. RESET O PUESTA A CERO DEl DISPOSITIVO
DE MANDO
I )
Frecuentemente, el paro de emergencia de un circuito neumático exige que el
dispositivo de mando se coloque en posición inicial, para que una vez desactivado se inicie de nuevo la secuencia.
)
')
()
Para conseguirlo se dota al dispositivo de mando de ,una entrada de reset,
mediante la cual se borran todas las salidas, excepto la última que' se activa. Es
)
)
330
331
)
l~tUIVIAIIU\
IIWU>IKIAL. UI>tNU, >tLtLLlUN
IVlt IUÚU rA,U A rA>U
¡ t~IUUIU Ut tLcMtNIUS NlUMAillÚS
)
)
decir, las memorias del dispositivo se pueden borrar por el propio funcionamiento del mismo o a través de una orden externa, por lo que será necesario
interponer en la orden de borrado de las mismas una válvula selectora de circuito, excepto en la última que se montará en la orden de activación, quedando el dispositivo de mando de' cuatro salidas como se muestra en la Figura
15.15.
4° En la posición anterior al arranque de la secuencia, o posición inicial, el dispositivo de mando se encuentra con todas las salidas anuladas excepto la
última que se encuentra activada.
J
5° La activación de los distribuidores que componen
realiza mediante una válvula de simultaneidad,
anterior (50,1)y la entrada correspondiente (e.),
~
el dispositivo de mando, se
conectada entre la salida
J
6° La desadivación de una memoria se realiza a través de una válvula selectora
de circuito, conectada entre la salida siguiente a la que manda presión dicha
memoria (5n+l)y la línea correspondiente al reset. La última válvula selectora
se conecta en la activación entre la válvula de simultaneidad y el reset.
e,
e.
e.
e.
R••• I
7° Se dibujan los cilindros y los distribuidores que los gobiernan, teniendo en
cuenta que éstos se alimentan directamente de la red y nunca de las salidas
del dispositivo de mando.
Figura 15.15
8° Cada orden se toma directamente
Analizando el dispositivo de mando paso a paso, se observa que cumple las propiedades:
1" Número de señales de entrada es igual al número de señales de salida.
2" Las señales de salida permanecen
entrada.
memorizadas aunque se retire la señal de
3" A cada señal de entrada le corresponde
j
IJ
10° El último final de carrera de la secuencia se monta en simultaneidad con las
~
condiciones de mando, para tener la seguridad de que una nueva secuencia no comienza, sin haber finalizado la anterior.
J
)
'~
)
CUESTIONES
)
1. Citar las ventajas e inconvenientes
del método paso a paso respecto del de
2. Para que haya presión en la salida (S) del dispositivo de mando, ¿que condiciones se tienen que cumplir?
.
1° Escribir correctamente
3. ¿Quién borra la válvula de memoria que suministra la salida (5n)?
3° A cada grupo le corresponde una salida del dispositivo de mando. Cada salida es proporcionada por una válvula 3/2 de memoria. Por tanto, el número
de distribuidores del dispositivo de mando, es igual al número de grupos en
que se ha dividido la secuencia.
,)
.J
5. NORMAS PARA LA RESOLUCiÓN DE CIRCUITOS POR El MÉTODO
PASO A PASO MÁXIMO
2° Dividir la secuencia en tantos grupos como fases contenga.
J
J
9° El final de carrera que certifica el final.de una fase, sirve para cambiar la presión a la salida siguiente. Los finales de carrera se alimentan directamente de
la red y constituyen las entradas del dispositivo de mando.
cascada.
la secuencia.·
~
'j
del grupo al que pertenece.
una determinada señal de salida.
4" En cada momento sólo existe una señal de salida y el resto se encuentran
anuladas.
S" Las señales de entrada sólo son eficaces si se activan ordenadamente.
J
4. Citar las ventajas e inconvenientes
del máximo.
J
)
J
)
del método paso a paso mínimo respecto
J
)
J
5. ¿En qué consiste el reset?
)
6. Citar las propiedades del dispositivo de mando paso a paso.
J
..J
332
333
---------""'-'
.J
()
(
)
(
)
NEUMÁTICA INDUSTRIAl. DISEÑD, SElECCiÓN y ESTUDIO DE ElEMENTOS NEUMÁTICOS
1V1t;'UUV
I
n.Jv
MI
n-,v
CJ
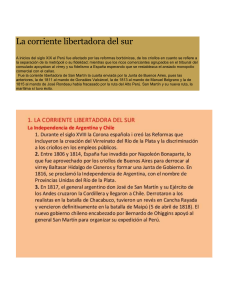
7. En el esque~a de ':l0ntaje de la Figura 15.16, el cilindro (A) sujeta la pieza.
A co~tlnuaclo~ el Cilindro (B) procede al taladrado de la misma y una vez conseguido se retira. La secuencia finaliza cuando el cilindro (A) ha soltado la
pieza. Deducir:
En el diagrama de mando se emplea el número (O) para indicar que el capta dar
de información se encuentra desactivado y el numero (1) para indicar que se
encuentra activado.
.
De este modo,
15.17.
c)
!¡.,
eJ
(.J
01
')
J)
(J.
(j
()
()
()
<,
/
A-
1° Diaqrama de desplazamiento fase, ya través de él detectar los problemas
de simultaneidad de señales.
B+
2° Grafcet.
B-
1° El di~grama de desplazamiento-fase completo consta de dos diaqrarnas: El
propio diagrama, en el que se representan los movimientos de los actuadores en las diferentes fases de la secuencia, y el diagrama de mando, en el que
se representa el estado de los captadores de información en cada una de las
fases de la misma.
()
Para ello. en el eje de abcisas se representan las diferentes fases de la secuencia
en el eje de ordenedas el estado de los actuadores, designados por la letra del
a.ctuador y el ~Ig~o (+), para indicar que el vástago se encuentra extraído, y el
signo (-) para indicar que se encuentra con ~I vástago retraído.
y
(~
e)
()
334
Fases
I
I
()
()
<;
/
paso a
c)
()
Desplazamiento
A+
15.16
3° Circuito. neumático, si se emplea para su resolución el método
paso maxirno. siquiendo las normas de resolución.
)
FASE2: La activación de (a.) produce la orden para que el cilindro (B) avance, produciendose la desactivación de (bo)y al finalizar la fase la activación de (b.).
ESTADO
00
Figura
()
el de la Figura
FASE4: (bs) da la orden para que (A) suelte la pieza, lo que produce la desactivación de (a.) y la activación de (ao) al finalizar su movimiento.
~~*~
{J
resultaría
FASE3: (b.) produce la orden para que el cilindro (B) se retraiga, dando lugar a
la desactivación de (b.) y a la activación de (be).
.
"
{J
desplazamiento-fase
FASE 1: Durante esta fase, al activar brevemente el (PM), el vástago del cilindro
(A) avanza por lo que (ae) se desactiva y al finalizar la fase se activa (a-).
B
-()
el diagrama
I
2
Mand
I
Fases
4
3
Figura
o
15. 17
335
NEUMÁTICA INDUSTRIAl. DISEÑO, SELECCiÓN Y ESTUDIO DE ELEMENTOS NEUMÁTICOS
METODO PASO A PASO
Para detectar la simultaneidad de señales hay que fijarse en el diagrama de
mando, observando simultáneamente los captadores que emiten órdenes contrarias.
)
La orden (a-) se da mediante PM y la orden (a-) mediante (bo). Como (be) en la
FASE 1 se encuentra activado, se tiene que anular la señal emitida por él para
que la secuencia pueda arrancar. Sin embargo, cuando en la FASE 4 se da la
orden (e-). no hay problema, pues el (PM) se encuentra en estado (O).
J
J
J
La orden (b-) la da (a.) y la (b-) la da (b.). Cuando en la FASE 2 se da. la orden
(b-), no hay problema, pues (b.) se encuentra en estado (O). Sin embargo cuando en la FASE 3 se la orden (b-), (a.) se encuentra en estado (1), por lo que hay
que anular dicha señal.
J
J
2° El Grafcet está estrechamente ligado al funcionamiento de la máquina y permite escribir sin ambigüedad todos los pasos, fases o etapas de la secuencia.
)
La representación gráfica de la secuencia está formada por un conjunto de etapas. Cada etapa se simboliza con un cuadrado, en cuyo interior está escrito el
número de etapa. La posición inicial se simboliza con un doble cuadrado y se le
asigna el número (O).
Figura 15.18
)
)
Las acciones asociadas a cada etapa están señaladas dentro de un rectángulo,
unido por una línea a la etapa ..
)
Entre cada etapa y junto a un trazo(transición), están indicadas las condiciones
lógicas(receptividades) de avance de la secuencia.
De este modo el grafcet para la secuencia anterior quedaría según la Figura 15.18.
3° Siguiendo las normas del epígrafe 5 se tiene:
3.1 Escribir correctamente
la secuencia.
)
)
.)
Figura 15.19
3.5 (Figura 15.20)
________ ~-- __ ~
________
)
----------------------------
~----~------~--~--------------------
________-+
~------~--~------~--~--------
S,
)
S2
S3
)
~~----~----~------~--4-------4----t--~r---S4*
)
J
A+ B+ B- A-
)
3.2 Dividir la secuencia en grupos.
)
Figura
)
15.20
)
3.6 (Figura 15.21)
)
3.3 Y 3.4 (Figura 15.19)
)
336
337
)
t
()
)"
)
NEUMÁTICA INDUSTRIAl. DISEÑO, SÉLECCIÓN y ESTUDIO DE ELEMENTOS NEUMÁTICOS
()
(
)
(
)
, )
1)
)
(
Figura
15.21
Figura
15.22
1)
)
3.7
a
3.10 (Figura 15.22)
')
1)
)
)
)
)
)
)
)
)
8. Utilizando
el método paso a paso resolver la secuencia A+ A- A+ A-.
9. Obtener las posibilidades que nos ofrece el circuito neumático de la Figura 15.23.
..
)
1)
)
,
r------~
1
r
~1~~
)
rA--.....,
)
)
)
)
)
)
)
)
1)
,
1
Figura
15.23