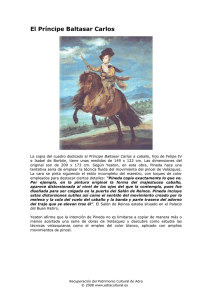
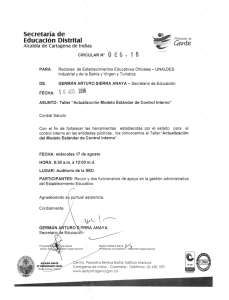
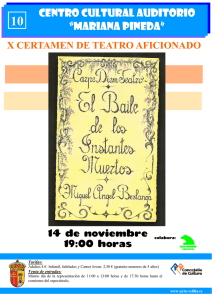
Universidad Tecnológica de Tula-Tepeji Ingeniería en Energías Renovables Diseño de Proyectos de Sistemas de Bioenergía Modelado de ecuaciones diferenciales, practica II. Profesor: Israel Pozo Morales Alumno: Jesús Germán Pineda López Grupo: 10 IER-G1 Décimo Cuatrimestre Jesús Germán Pineda López 10 IER-G1 Objetivo: Identificar el modelo matemático de un sistema a partir una ecuación diferencial y su arreglo en diagrama de bloques mediante la simulación asistida por Simulink. Introducción La presente práctica, requiere generar el aprendizaje de la relación de un modelo matemático y un diagrama de bloques, mismos que representan el comportamiento de un sistema, para ello se requiere entonces generar una grafica del comportamiento a partir de la solución de ecuaciones diferenciales. Marco teórico Matlab y Simulink. Cuando se utiliza MATLAB® y Simulink® conjuntamente, en realidad está combinando programación textual y gráfica para diseñar su sistema en un entorno de simulación. (MAthWorks®, 2020) Simulink es un software diseñado para la ® modelización y la simulación multidominio, ya que es posible reutilizar los modelos en diferentes entornos a fin de simular cómo funcionan todas las partes del sistema juntas. Permite: • Modelizar un sistema en diferentes dominios mediante herramientas específicas y bloques prediseñados. • Desarrollar modelos a gran escala mediante el uso de componentes, con librerías y componentes del sistema reutilizables. • Combinar modelos en una simulación de nivel de sistema, aunque no se hayan creado en Simulink. • Ejecutar simulaciones masivas en paralelo en un equipo de escritorio con varios núcleos, un clúster de equipos o en la nube sin tener que escribir un código demasiado amplio. Jesús Germán Pineda López 10 IER-G1 Ejecución de la práctica. Primero se debe ubicar la librería de Simulink, la cual cuenta con una serie de bloques, que se pueden utilizar para la simulación de adquisición de datos o bien un control PID o similares. La práctica requerirá de generar el diagrama de bloques y la onda que corresponda al modelo matemático en la solución de ecuaciones diferenciales de un circuito eléctrico. Resolver 𝐿∗ 𝑑𝑖𝐿 + 𝑅 ∗ 𝑖𝐿 + 𝑉𝑜 − 𝑉𝑑𝑐 = 0 𝑑𝑡 𝐶∗ 𝑑𝑉0 𝑉0 − 𝑖𝐿 + =0 𝑑𝑡 𝑅𝐿 Donde: R=0.01 ohms C=220uF=0.000220F L=15mH= 0.015H 𝑅𝐿 =10 ohms. 𝑉𝑑𝑐 = 250 V. Donde se requiere calcular los valores para 𝑖𝐿 y 𝑉0 . Despejando cada una de las expresiones queda: 1 𝑑𝑖𝐿 = (𝑉𝑑𝑐 − 𝑉𝑜 − 𝑅 ∗ 𝑖𝐿 ) ∗ ( ) ∗ (𝑑𝑡) 𝐿 𝑑𝑉0 = (𝑖𝐿 − Jesús Germán Pineda López 𝑉0 1 ) ∗ ( ) ∗ (𝑑𝑡) 𝑅𝐿 𝐶 10 IER-G1 Modelado y simulación Ilustración 1 Arreglo del diagrama de bloques de las ecuaciones diferenciales. Jesús Germán Pineda López 10 IER-G1 Ilustración 2 Comportamiento de la Corriente eléctrica al fluir por la bobina. Jesús Germán Pineda López 10 IER-G1 Ilustración 3 Comportamiento del Voltaje al interactuar del capacitor. Jesús Germán Pineda López 10 IER-G1 Resultados Como se puede observar en el diagrama de bloques las variables que se encuentran en función del Tiempo son la corriente y el voltaje; el comportamiento de ambas señales se puede apreciar en las gráficas, donde se observa que después que una perturbación al comienzo del funcionamiento del sistema para después regularse a los valores óptimos. Como resultado de las simulaciones, el valor para la corriente que fluye a través de la bobina alcanza el valor de 24.98 Amperes; para el voltaje del capacitor, este realiza su proceso de carga y descarga estabilizando el voltaje hasta 249.8 Volts. Como dato extra, para obtener las gráficas mostradas, las unidades fueron manejadas en un esquema base para hacer congruentes las operaciones. iL=24.98 A Vo= 249.8 V Conclusiones La práctica que se realizó, permite la introducción a los sistemas controlados, tal pudiera ser el caso de un equipo como el inversor de corriente, un equipo eléctrico; los elementos que interactúan en la práctica, permiten la estabilización de las frecuencias de la señal en un pronto instante; en primera parte una resistencia interactúa con una bobina para estabilizar la corriente y que fluya a través de los demás elementos sin dañarlos. Por otra parte, el capacitor tambien interactúa con los componentes ya mencionados (bobina y resistores) para la protección del sistema, esto se logra compensado por un instante el voltaje que este adquiere en su fase de carga, una vez estabilizado y compensado la energía en el momento del “arranque”, éste se descarga y se regula el voltaje del sistema. En conclusión, se ha logrado apreciar el control de señales mediante la aplicación de Simulink, que con los conocimientos previos de: matemáticas, control, electricidad y electrónica se ha llevado a cabo la practica y la interpretación de la misma con éxito. Jesús Germán Pineda López 10 IER-G1 Referencias Fernández, M. C. (2019). MANUAL BÁSICO. En M. C. Fernández, Servicios Informáticos U.C.M (pág. 4). España: Universidad Complutense de Madrid. MAthWorks®. (24 de 08 de 2020). https://es.mathworks.com/. Obtenido de Modelado y Simulación de Sistemas: https://es.mathworks.com/solutions/systemdesign-simulation.html Jesús Germán Pineda López 10 IER-G1