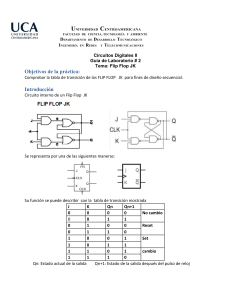
Arquitectura de Sistemas Digitales 1 Arquitectura de Sistemas Digitales 2 © Corporación Universitaria Remington Cuarta edición 2018 Arquitectura de Sistemas Digitales Guiovanny Alberto Flórez Osorio Facultad de Ciencias Básicas e Ingeniería Editorial Uniremington Medellín, Colombia Derechos Reservados ©2011 Primera Segunda Tercera Cuarta edición: edición: edición: edición: 2001 2012 2015 2018 Responsables Jorge Mauricio Sepúlveda Castaño Decano de la Facultad de Ciencias Básicas e Ingeniería [email protected] Francisco Javier Álvarez Gómez Coordinador CUR-Virtual [email protected] Edición y Montaje Vicerrectoría de Educación a Distancia y Virtual Equipo de diseño gráfico www.uniremington.edu.co [email protected] Derechos reservados: El módulo de estudio del curso de ARQUITECTURA DE SISTEMAS DIGITALES es propiedad de la Corporación Universitaria Remington; las imágenes fueron tomadas de diferentes fuentes que se relacionan en los derechos de autor y las citas en la bibliografía. El contenido del módulo está protegido por las leyes de derechos de autor que rigen al país. Este material tiene fines educativos y no puede usarse con propósitos económicos o comerciales. El autor(es) certificó (de manera verbal o escrita) No haber incurrido en fraude científico, plagio o vicios de autoría; en caso contrario eximió de toda responsabilidad a la Corporación Universitaria Remington y se declaró como el único responsable. Esta obra es publicada bajo la licencia Creative Commons. Reconocimiento-No Comercial-Compartir Igual 2.5 Colombia Arquitectura de Sistemas Digitales TABLA DE CONTENIDO 3 Pág. 1 UNIDAD 1 PRINCIPIOS DE ELECTRICIDAD Y MAGNITUDES ELÉCTRICAS 1.1.1 RELACIÓN DE CONCEPTOS 9 9 1.2 TEMA 1 ESTRUCTURA DE LA MATERIA 10 1.3 TEMA 2 ELECTROESTÁTICA 11 1.4 TEMA 3 ELECTRICIDAD 12 1.5 TEMA 4 ¿CÓMO SE PRODUCE ELECTRICIDAD? 12 1.6 TEMA 5 CONDUCTORES, SEMICONDUCTORES Y AISLANTES. 13 1.7 TEMA 6 ELECTRÓNICA 14 1.8 TEMA 7 LA RESISTENCIA ELÉCTRICA 1.8.1 EJERCICIOS DE APRENDIZAJE 1.8.2 EJERCICIO DE APRENDIZAJE 1.8.3 EJERCICIO DE APRENDIZAJE 1.8.4 EJERCICIO DE APRENDIZAJE 14 17 21 23 25 1.9 TEMA 8 EL VOLTAJE 1.9.1 GENERALIDADES 28 28 1.10 TEMA 9 LA CORRIENTE ELÉCTRICA 1.10.1 GENERALIDADES 30 30 1.11 LA TEMA 10 POTENCIA ELÉCTRICA 1.11.1 GENERALIDADES 1.11.2 EJERCICIOS DE ENTRENAMIENTO 31 32 32 2 35 2.1 UNIDAD 2 TIPOS DE CIRCUITOS BÁSICOS Y LAS LEYES DE LA ELECTRICIDAD TEMA 1 EL CIRCUITO ELÉCTRICO 37 2.2 TEMA 2 LEYES PARA CIRCUITOS 2.2.1 LEY DE OHM 2.2.2 EJERCICIOS DE APRENDIZAJE 2.2.3 LEY DE WATT 2.2.4 EJERCICIOS DE APRENDIZAJE 2.2.5 LEY DE JOULE 2.2.6 EJERCICIOS DE APRENDIZAJE 37 37 38 40 41 43 44 2.3 47 TEMA 3 TEORÍA DE LA CORRIENTE CONTINUA Y LA CORRIENTE ALTERNA Arquitectura de Sistemas Digitales 4 2.3.1 EJERCICIO DE APRENDIZAJE 50 2.4 TEMA 4 CIRCUITOS DE CORRIENTE CONTINUA 2.4.1 CIRCUITO SERIE 2.4.2 EJERCICIO DE APRENDIZAJE 2.4.3 CIRCUITO PARALELO 2.4.4 EJERCICIO DE APRENDIZAJE 2.4.5 CIRCUITO MIXTO 2.4.6 EJERCICIO DE APRENDIZAJE 2.4.7 EJERCICIOS DE ENTRENAMIENTO 52 52 53 56 57 61 61 65 3 69 UNIDAD 3 ELEMENTOS ELECTRÓNICOS 3.1 TEMA 1 EL CAPACITADOR 3.1.1 GENERALIDADES 70 70 3.2 TEMA 2 EL INDUCTOR 3.2.1 GENERALIDADES 3.2.2 EL TRANSFORMADOR 72 72 74 3.3 TEMA 3 EL DIODO 3.3.1 GENERALIDADES 76 76 3.4 TEMA 4 EL TRANSISTOR 3.4.1 GENERALIDADES 78 78 3.5 TEMA 5 EL CIRCUITO INTEGRADO 3.5.1 GENERALIDADES 3.5.2 TEMPORIZADOR IC-555 3.5.3 EJERCICIOS DE ENTRENAMIENTO 79 79 79 82 4 84 UNIDAD 4 CIRCUITOS LÓGICOS Y COMPONENTES DIGITALES 4.1.1 RELACIÓN DE CONCEPTOS 4.2 TEMA 1 COMPUERTAS DIGITALES 4.2.1 EJERCICIOS DE APRENDIZAJE 4.3 TEMA 2 ÁLGEBRA BOOLEANA 84 86 92 101 4.4 TEMA 3 SIMPLIFICACIÓN DE EXPRESIONES ALGEBRAICAS POR MEDIO DE TEOREMAS Y DE MAPAS DE KARNAUGH 4.4.1 EJERCICIOS DE APRENDIZAJE 4.4.2 EJERCICIOS DE APRENDIZAJE. 4.4.3 EJERCICIO DE APRENDIZAJE. 103 104 107 108 4.5 TEMA 4 FLIP - FLOPS 4.5.1 Ejercicios de Aprendizaje. 111 114 4.6 116 TEMA 5 CIRCUITOS INTEGRADOS DIGITALES Arquitectura de Sistemas Digitales 5 4.7 TEMA 6 CODIFICADOR 4.7.1 EJERCICIO DE APRENDIZAJE. 120 120 4.8 TEMA 7 DECODIFICADOR 4.8.1 EJERCICIOS DE APRENDIZAJE 122 122 4.9 TEMA 8 MULTIPLEXOR 4.9.1 EJERCICIO DE APRENDIZAJE 125 125 4.10 TEMA 9 DEMULTIPLEXOR 4.10.1 EJERCICIO DE APRENDIZAJE 127 128 4.11 TEMA 10 REGISTRO 4.11.1 EJERCICIOS DE ENTRENAMIENTO 129 130 5 134 UNIDAD 5 ELEMENTOS FUNCIONALES DE UN COMPUTADOR 5.1.1 RELACIÓN DE CONCEPTOS 134 5.2 TEMA 1 EL COMPUTADOR 135 5.3 TEMA 2 TIPOS DE COMPUTADORES 136 5.4 TEMA 3 UNIDAD CENTRAL DE PROCESAMIENTO 5.4.1 UNIDAD ARITMÉTICO LÓGICA 5.4.2 UNIDAD DE CONTROL 137 138 139 5.5 TEMA 4 UNIDAD DE MEMORIA 140 5.6 TEMA 5 UNIDAD DE ENTRADA Y SALIDA 142 5.7 TEMA 6 BUSES 5.7.1 EJERCICIOS DE APRENDIZAJE. 5.7.2 EJERCICIOS DE ENTRENAMIENTO 142 143 145 6 147 UNIDAD 6 TIPOS DE ARQUITECTURAS 6.1.1 RELACIÓN DE CONCEPTOS 147 6.2 TEMA 1 ARQUITECTURAS ISA 6.2.1 ARQUITECTURAS DE PILA. 6.2.2 ARQUITECTURAS DE ACUMULADOR 6.2.3 ARQUITECTURAS DE REGISTROS DE PROPÓSITO GENERAL 148 149 149 149 6.3 TEMA 2 ARQUITECTURAS REGISTRO - REGISTRO 6.3.1 EJERCICIO DE APRENDIZAJE. 6.3.2 EJERCICIOS DE ENTRENAMIENTO 150 150 152 7 155 GLOSARIO Arquitectura de Sistemas Digitales 6 8 BIBLIOGRAFÍA 160 Arquitectura de Sistemas Digitales 7 PROPÓSITO GENERAL ARQUITECTURA DE SISTEMAS DIGITALES Busca establecer las bases teóricas y prácticas de la Electrónica y la Arquitectura de los Computadores, para desarrollar la capacidad de entender, analizar y aplicar los conceptos adquiridos. Arquitectura de Sistemas Digitales 8 ARQUITECTURA DE SISTEMAS DIGITALES OBJETIVO GENERAL Aplicar los conceptos de: Principios de Electricidad, magnitudes eléctricas, tipos de circuitos, leyes de la electricidad, elementos electrónicos, circuitos lógicos y componentes digitales, elementos funcionales de un computador y tipos de arquitecturas enfocados en el funcionamiento de los computadores y su interfaz con el mundo exterior. OBJETIVOS ESPECÍFICOS Aplicar los conocimientos de las magnitudes eléctricas en la resolución de problemas de circuitos. Utilizar las leyes básicas de la electricidad que rigen a los circuitos. Demostrar por medio de la práctica el uso de los componentes electrónicos. Aplicar los conocimientos de las compuertas lógicas y los componentes digitales en la resolución de problemas de circuitos lógicos. Ilustrar el funcionamiento de cada una de las unidades que componen al computador. Demostrar por medio de la práctica el uso de las arquitecturas del computador. UNIDAD 1 UNIDAD Principios de la electricidad y magnitudes eléctricas Tipos de circuitos básicos y las llaves de la electricidad 2 UNIDAD 3 UNIDAD 4 UNIDAD 5 UNIDAD 6 Elementos electrónicos Circuitos lógicos y componentes digitales Elementos funcionales de un computador Tipos de arquitectura Arquitectura de Sistemas Digitales 9 1 UNIDAD 1 PRINCIPIOS DE ELECTRICIDAD Y MAGNITUDES ELÉCTRICAS Video: Principios de electricidad-a ”Ver Video”: https://www.youtube.com/watch?v=kKOMn3eHnPw 1.1.1 RELACIÓN DE CONCEPTOS Átomo: Es la unidad básica de toda la materia. De igual forma es la estructura que define a todos los elementos y tiene propiedades químicas bien definidas. Corriente: Es la cantidad de electrones en movimiento que se mueven por un medio conductor. Electricidad: Conjunto de fenómenos físicos relacionados con la presencia y flujo de cargas eléctricas. Electroestática: Parte de la física que estudia las interacciones entre las cargas eléctricas en reposo. Arquitectura de Sistemas Digitales 10 Electrón: Es una partícula subatómica con carga eléctrica negativa. Gira alrededor del núcleo. Electrónica: Es el área de la Ingeniería que se fundamenta en el control del flujo de electrones que circulan por un medio conductor. Magnitud: Propiedad característica de un cuerpo, sustancia o fenómeno físico que puede ser cuantificable. Materia: Es todo lo que ocupa espacio. Tiene forma, peso, dimensiones. Neutrón: Es una partícula subatómica sin carga neta. Se encuentra en el núcleo del átomo. Potencia: Es la velocidad de suministro (Fuente de alimentación) y de consumo (Lámpara, motor, circuito, etc.) de la energía eléctrica. Protón: Es una partícula subatómica con carga eléctrica positiva. Se encuentra en el núcleo del átomo. Resistencia: Es la oposición que ofrece un material al paso de la corriente eléctrica. Voltaje: Es la diferencia de cargas o de potencial que existe entre dos puntos con diferente polaridad. 1.2 TEMA 1 ESTRUCTURA DE LA MATERIA Materia: Es todo lo que ocupa espacio. Tiene forma, peso, dimensiones. La materia se divide en: Sólido. Líquido. Gaseoso. La materia presenta propiedades que permiten diferenciar unos cuerpos de otros. Entre las cuales se encuentran: Masa: Conjunto de partículas que conforman un cuerpo. Energía: Capacidad que presentan los cuerpos para realizar un trabajo. Espacio: Lugar ocupado por un cuerpo en determinado tiempo. Tiempo: Relativo a cambio, duración, etapa o movimiento. La materia se divide en moléculas, las cuales a su vez se dividen en átomos. Arquitectura de Sistemas Digitales 11 1.3 TEMA 2 ELECTROESTÁTICA La estructura básica del átomo contempla al núcleo y a las órbitas electrónicas. Los átomos se dividen en partículas llamadas: Electrón, Protón y Neutrón. Al electrón se le conoce como partícula negativa y al protón como partícula positiva. De acuerdo a la distribución de estas partículas se tiene que en el núcleo del átomo se encuentran: Los protones con carga eléctrica positiva. Los neutrones que como su nombre lo indica no tienen carga eléctrica es decir son neutros. Alrededor del núcleo giran los electrones (Órbita electrónica) los cuales poseen carga eléctrica negativa. Cuando un átomo tiene igual número de partículas positivas y negativas se dice que éste es neutro. Con el paso del tiempo el hombre descubre que los electrones se podían liberar de las órbitas al aplicar la energía necesaria. Por ejemplo, la fricción. La fricción genera calor y éste produce la liberación de los electrones. Cargas positivas y cargas negativas Al liberarse los electrones aparecen los conceptos de objeto con carga negativa y objeto con carga positiva. Objeto con carga negativa. Objeto con carga positiva. Es aquel que posee exceso de electrones, es decir tiene más electrones que protones. (Gana electrones) Es aquel que posee deficiencia de electrones, es decir tiene más protones que electrones. (Pierde electrones) La carga eléctrica que adquiere el objeto es temporal ya que por las leyes de la naturaleza todo tiende al equilibrio. De esta forma el que un cuerpo adquiera carga eléctrica ya sea negativa o positiva utilizando diferentes medios para la liberación de los electrones se denomina Electroestática. Arquitectura de Sistemas Digitales 12 Ley de las cargas. Enuncia la interacción entre objetos cargados. La ley de las cargas dice: Objetos con cargas del mismo signo se repelen (alejan) y objetos con cargas de diferente signo se atraen. Repulsión. Atracción Autoría propia 1.4 TEMA 3 ELECTRICIDAD Cuando los electrones pasan de un cuerpo a otro, el cuerpo que pierde electrones se carga positivamente y el que gana electrones se carga negativamente. Este movimiento de electrones es lo que se llama Electricidad. Estos electrones son los llamados electrones libres. 1.5 TEMA 4 ¿CÓMO SE PRODUCE ELECTRICIDAD? La energía eléctrica se produce por medio de generadores o alternadores. Para que un generador funcione requiere de otra fuente de energía; la cual permite la producción de la energía eléctrica. Arquitectura de Sistemas Digitales 13 Hay varias fuentes que se utilizan para generar electricidad; entre ellas: El agua (Hidroeléctrica) El calor (Termoeléctrica) La geotermia (el calor interior de la Tierra) La energía del átomo (Nuclear) Las energías renovables: solar (Sol), eólica (Viento), biomasa (leña, carbón, entre otros). La mayoría de las plantas generadoras de electricidad toman estas fuentes de energía para producir calor. Una turbina está conectada al generador. Cuando el generador gira aparece la energía eléctrica como consecuencia de éste movimiento. 1.6 TEMA 5 CONDUCTORES, SEMICONDUCTORES Y AISLANTES. Conductores. Son aquellos elementos o materiales que permiten con facilidad el paso de los electrones. Ejemplos: Los mejores conductores de la corriente eléctrica son los metales. (Plata, Oro, Cobre, Aluminio, entre otros) También están: Agua, madera húmeda, etc. Los átomos de estos materiales o elementos ceden más fácil los electrones que giran en la última órbita electrónica. Aislantes. Son todos aquellos materiales o elementos que se oponen en gran medida al desplazamiento de los electrones. Ejemplos: Caucho, mica, vidrio, cerámica, madera seca, etc. Los átomos de estos elementos o materiales no pierden ni ganan electrones. Semiconductores. Son aquellos materiales o elementos que se comportan como conductores o como aislantes dependiendo de la temperatura ambiente en el que se encuentren. Arquitectura de Sistemas Digitales 14 Ejemplos: El elemento semiconductor más usado es el silicio. Aparecen también el Germanio, el Galio, el Cadmio, el Boro, el indio, etc. Los átomos de estos elementos o materiales son menos propensos a ceder electrones. Dejan circular a los electrones en un solo sentido. 1.7 TEMA 6 ELECTRÓNICA La Electrónica es el área de la Ingeniería que se fundamenta en el control del flujo de electrones que circulan por un medio conductor. Esto permite la utilización de los electrones para diferentes fines tales como: transmisión y recepción de datos, control de procesos, funcionamiento de dispositivos. 1.8 TEMA 7 LA RESISTENCIA ELÉCTRICA La resistencia eléctrica es la oposición que ofrece un material al paso de la corriente eléctrica. Se representa por la letra R. Generalidades La resistencia eléctrica también se denomina resistor. La unidad fundamental de la resistencia eléctrica es el Ohmio en honor a Georg Simón Ohm. El ohmio se representa como Ω (Letra griega Omega). Los circuitos electrónicos necesitan incorporar resistencias. El objetivo es limitar la cantidad de corriente para así evitar daños en los componentes. Los símbolos que se manejan para un resistor son: Arquitectura de Sistemas Digitales 15 Autoría propia Para el manejo de la unidad de resistencia se contemplan los siguientes múltiplos y submúltiplos: Múltiplos de la resistencia. El Kiloohmio (KΩ) que equivale a 1 x 103 Ω. El Megaohmio (MΩ) que equivale a 1 x 106 Ω. Submúltiplo de la resistencia. El Miliohmio (mΩ) que equivale a 1 x 10-3 Ω. Resistencia de un material. La resistencia eléctrica de un material depende de: Longitud. Área. El mismo material. 𝑹= Dónde: ρ: Coeficiente de resistividad. Dado en L: Longitud. Dada en m Ω𝑚𝑚2 𝑚 𝝆𝑳 𝑨 Arquitectura de Sistemas Digitales 16 A: Área. Dada en 𝑚𝑚2 Comparando dos materiales se tiene: Caso A Caso B Caso C ρ iguales, A iguales, L diferentes ρ iguales, L iguales, A diferentes L iguales, A iguales, ρ diferentes. La resistencia es directamente proporcional a la longitud. La resistencia es inversamente proporcional al área. La resistencia depende exclusivamente del material. Es decir: Es decir: A mayor longitud, mayor resistencia y a menor longitud, menor resistencia. A menor área, mayor resistencia y a mayor área, menor resistencia. A continuación, se presenta el coeficiente de resistividad para algunos materiales. Material 𝝆 ( Ω mm2 / m ) Plata 0,0163 Cobre 0,017 Oro 0,023 Aluminio 0,028 Zinc 0,061 Latón 0,07 Estaño 0,12 Arquitectura de Sistemas Digitales 17 Hierro 0,13 Plomo 0,204 Maillechort (Cu-Zn-Ni) 0,3 Constantán (Cu-Ni) 0,50 Ferroníquel (Fe-Ni) 0,86 Mercurio 0,957 Nicrón (Ni-Cr) 1 Carbón 63 Tabla. Coeficiente de resistividad, a 20 °c de temperatura, de los materiales más utilizados. 1.8.1 EJERCICIOS DE APRENDIZAJE 1) a) ¿Qué resistencias poseen los materiales de Hierro y Estaño si tienen las Mismas especificaciones; L = 0,040 Km, ¿A = 3 mm2? b) ¿Cuál escogería como aislante y por qué? Solución. a) Tanto para el Hierro como para el Estaño se debe determinar la resistencia a partir de la expresión: 𝑹= 𝝆𝑳 𝑨 Antes de reemplazar se deben llevar las magnitudes a sus unidades fundamentales. Como la longitud está en Km; multiplicamos por 1000 para pasarla a m 0,040 ×1000= 40 Con ello se tiene que L=40 m Arquitectura de Sistemas Digitales 18 Con esto se procede a calcular las resistencias requeridas. Para el Hierro. Datos: Ω𝑚𝑚2 𝝆 = 0,13 𝑚 L=40 m 𝑨 = 3 𝑚𝑚2 Reemplazando en 𝑹= 𝝆𝑳 𝑨 Se obtiene: 𝑅= 0,13 × 40 3 𝑅= 5,2 3 R=1,73 Ω Para el Estaño. Datos: Ω𝑚𝑚2 𝝆 = 0,12 𝑚 L=40 m 𝑨 = 3 𝑚𝑚2 Reemplazando en Arquitectura de Sistemas Digitales 19 𝑹= 𝝆𝑳 𝑨 Se obtiene: 𝑅= 0,12 × 40 3 𝑅= 4,8 3 R=1,6 Ω b) Escogería como aislante al Hierro ya que ofrece mayor oposición al paso de los electrones (Mayor resistencia) 2) ¿Qué material es necesario utilizar para conseguir que un metro de material de 0.5 mm2 posea una resistencia de 56 mΩ? Solución. Se debe determinar el coeficiente de resistividad a partir de la expresión 𝑹= 𝝆𝑳 𝑨 𝝆= 𝑨𝑹 𝑳 Para ello se despeja obteniendo Antes de reemplazar se deben llevar las magnitudes a sus unidades fundamentales. Como la resistencia está en mΩ; dividimos entre 1000 para pasarla a Ω 56 ÷1000= 0,056 Con ello se tiene que R= 0,056 Ω Con esto se procede a calcular el coeficiente de resistividad requerido. Datos: Arquitectura de Sistemas Digitales 20 R= 0,056 Ω L=1 m 𝑨 = 0,5 𝑚𝑚2 Reemplazando en 𝝆= 𝜌= 𝑨𝑹 𝑳 0,5 × 0,056 1 Ω𝑚𝑚2 𝜌 = 0,028 𝑚 Este coeficiente de resistividad corresponde al Aluminio que es el material a utilizar. Otras consideraciones La resistencia aumenta con el incremento de temperatura. Para medir la resistencia eléctrica se utiliza el óhmetro. Éste se debe colocar en paralelo con el elemento al que se le va a medir la resistencia. Se debe tener en cuenta que al medir la resistencia eléctrica no esté energizado el elemento pues se puede dañar el aparato de medida. Autoría propia Arquitectura de Sistemas Digitales 21 Resistencias en serie. Al implementar la conexión de resistores en serie éstos deben estar conectados uno tras otro. (Sólo existe un punto de conexión entre cada par de resistencias) Dos o más resistencias se encuentran conectadas en serie cuando al aplicar una fuente de alimentación (Energía) todas las resistencias son recorridas por la misma corriente. Autoría propia La resistencia equivalente de cualquier número de resistores conectados en serie es la suma de las resistencias individuales. 𝑹𝑻 = 𝑹𝟏 + 𝑹𝟐 + 𝑹𝟑 + … 1.8.2 EJERCICIO DE APRENDIZAJE Calcular la resistencia total para: Autoría propia Solución Como todas las resistencias están en Ω se procede a reemplazar en Arquitectura de Sistemas Digitales 22 𝑹𝑻 = 𝑹𝟏 + 𝑹𝟐 + 𝑹𝟑 𝑅𝑇 = 100 + 20 + 2 𝑅𝑇 = 122 Ω Resistencias en paralelo. Para implementar una conexión de resistencias en paralelo se conectan los resistores compartiendo extremos. (Dos puntos de conexión: Arriba - abajo) Autoría propia En el circuito de resistencias en serie la corriente tiene un sólo camino para circular, en el circuito de resistencias en paralelo la corriente se divide y circula por varios caminos. La resistencia equivalente de un circuito de resistencias en paralelo es igual al recíproco de la suma de las resistencias individuales: 𝑹𝑻 = 𝟏 𝟏 𝟏 𝟏 + + + … 𝑹𝟏 𝑹𝟐 𝑹𝟑 Casos particulares La resistencia equivalente de solo dos resistores en paralelo es: Si todos los resistores tienen el mismo valor de resistencia es: Arquitectura de Sistemas Digitales 23 𝑹𝑻 = 𝑹𝑻 = 𝑹𝟏 𝑹𝟐 𝑹𝟏 + 𝑹𝟐 𝑹 𝒏 Donde n: Número de resistencias. 1.8.3 EJERCICIO DE APRENDIZAJE Calcular la resistencia total para: Autoría propia Solución Como todas las resistencias están en Ω se procede a reemplazar en 𝑹𝑻 = 𝟏 𝟏 𝟏 𝟏 + + 𝑹𝟏 𝑹𝟐 𝑹𝟑 𝑅𝑇 = 1 1 1 1 + + 80 20 50 𝑅𝑇 = 1 0.0125 + 0.05 + 0.02 𝑅𝑇 = 1 0.0825 Arquitectura de Sistemas Digitales 𝑅𝑇 = 12.12 Ω 24 Conexión mixta de resistencias. La conexión mixta de resistencias es la combinación de resistores en serie y paralelo. Ejemplos: Autoría propia Arquitectura de Sistemas Digitales 25 Para simplificar una conexión mixta y obtener así la resistencia equivalente se van simplificando las resistencias que están en serie y las que están en paralelo de modo que el conjunto vaya resultando cada vez más sencillo, hasta terminar con un conjunto en serie o en paralelo. Normalmente se inicia desde la parte final de la conexión hacia la entrada. 1.8.4 EJERCICIO DE APRENDIZAJE Calcular la resistencia total para: Autoría propia Solución Como todas las resistencias están en Ω se procede a resolver la configuración a) 𝑅𝑇1 ( 𝑅3 está en paralelo con 𝑅4 ) Se utiliza la expresión para dos resistores en paralelo 𝑹𝑻𝟏 = 𝑹 𝟑 . 𝑹𝟒 𝑹𝟑 + 𝑹𝟒 Arquitectura de Sistemas Digitales 26 𝑅𝑇1 = 40 . 60 40 + 60 𝑅𝑇1 = 2400 100 𝑅𝑇1 = 24 Ω El esquema queda Autoría propia b) 𝑅𝑇2 (𝑅𝑇1 está en serie con 𝑅5 ) 𝑹𝑻𝟐 = 𝑹𝑻𝟏 + 𝑹𝟓 𝑅𝑇2 = 24 + 46 𝑅𝑇2 = 70 Ω El esquema queda Arquitectura de Sistemas Digitales 27 Autoría propia c) 𝑅𝑇3 ( 𝑅𝑇2 está en paralelo con 𝑅2 ) 𝑹𝑻𝟑 = 𝑹𝑻𝟐 . 𝑹𝟐 𝑹𝑻𝟐 + 𝑹𝟐 𝑅𝑇3 = 70 . 30 70 + 30 𝑅𝑇3 = 2100 100 𝑅𝑇3 = 21 Ω El esquema queda Arquitectura de Sistemas Digitales 28 Autoría propia d) 𝑅𝑇 ( 𝑅𝑇3 está en serie con 𝑅1 ) 𝑹𝑻 = 𝑹𝑻𝟑 + 𝑹𝟏 𝑅𝑇 = 21 + 19 𝑅𝑇 = 40 Ω Donde ésta resistencia reemplaza a las cinco resistencias del esquema original. 1.9 TEMA 8 EL VOLTAJE El voltaje es la diferencia de cargas o de potencial que existe entre dos puntos con diferente polaridad. También se denomina tensión eléctrica. Se representa por la letra V. 1.9.1 GENERALIDADES Veamos cómo entender más fácil el concepto de tensión: Si comparamos la corriente eléctrica con la corriente de agua y al Voltaje con la cantidad de agua que está acumulada en un tanque. En Éste caso la diferencia de potencial genera que la salida de agua por el tubo que tiene el tanque sea de mayor o menor cantidad. Así la corriente de agua saldrá con mayor o menor Arquitectura de Sistemas Digitales 29 fuerza. Lo mismo pasa con el voltaje que impulsa a los electrones para que se desplacen por un medio conductor. La unidad fundamental del voltaje es el Voltio en honor a Alessandro Volta. El voltio se representa como v. Para el manejo de la unidad de voltaje se contemplan los siguientes múltiplos y submúltiplos: Múltiplos del voltaje. El Kilovoltio (Kv) que equivale a 1 x 103 v. El Megavoltio (Mv) que equivale a 1 x 106 v. Submúltiplos del voltaje. El Milivoltio (mv) que equivale a 1 x 10-3 v. El Microvoltio (uv) que equivale a 1 x 10-6 v. Para medir el voltaje se utiliza el voltímetro. Éste se debe colocar en paralelo con el elemento al que se le va a medir la tensión. Para el siguiente diagrama se utiliza como carga una lámpara. El voltaje que hay en la lámpara es de 9v. Arquitectura de Sistemas Digitales 30 Autoría propia 1.10 TEMA 9 LA CORRIENTE ELÉCTRICA La corriente eléctrica es la cantidad de electrones en movimiento que se mueven por un medio conductor. También se denomina intensidad de ahí que se represente por medio de la letra I. 1.10.1 GENERALIDADES En un inicio el hombre creyó que las partículas que se desplazaban eran los protones y por ello determinó que la corriente eléctrica se movía del terminal positivo al negativo (Sentido convencional). Con el paso del tiempo se descubrió gracias al efecto Hall que en realidad las partículas que se mueven son los electrones los cuales circulan en sentido contrario al convencional, es decir del terminal negativo al terminal positivo. Entre los efectos que produce la corriente eléctrica se generan otros tipos de energía como: Calórica, lumínica, mecánica, química, magnética, cinética, entre otras. Arquitectura de Sistemas Digitales 31 La unidad fundamental de la corriente eléctrica es el Amperio en honor a André-Marie Ampère. El amperio se representa como A. Normalmente para la corriente eléctrica sólo se manejan submúltiplos los cuales se enuncian a continuación: El Miliamperio (mA) que equivale a 1 x 10-3 A. El Microamperio (uA) que equivale a 1 x 10-6 A. El Nanoamperio (nA) que equivale a 1 x 10 -9 A. El Picoamperio (pA) que equivale a 1 x 10-12 A. Para medir la corriente eléctrica se utiliza el amperímetro. Éste se debe colocar en serie con el elemento al que se le va a medir la intensidad. Para el siguiente diagrama se utiliza como carga una lámpara. La corriente que circula por la lámpara es de 90 mA. Autoría propia 1.11 LA TEMA 10 POTENCIA ELÉCTRICA La potencia eléctrica es la velocidad de suministro (Fuente de alimentación) y de consumo (Lámpara, motor, circuito, entre otros) de la energía eléctrica. Arquitectura de Sistemas Digitales 32 1.11.1 GENERALIDADES La unidad fundamental de la potencia eléctrica es el Vatio (Watt) en homenaje a James Watt. Para el manejo de la unidad de potencia eléctrica se contemplan los siguientes múltiplos y submúltiplos: Múltiplos de la potencia. El Kilovatio (Kw) que equivale a 1 x 103 W. El Megavatio (Mw) que equivale a 1 x 106 W. Submúltiplos de la potencia. El Milivatio (mW) que equivale a 1 x 10-3 W. El Microvatio (uW) que equivale a 1 x 10-6 W. Para medir la potencia eléctrica se utiliza el vatímetro. Sin embargo, no es necesario disponer de él ya que se puede obtener su valor a partir de la medición del voltaje y la corriente. 1.11.2 EJERCICIOS DE ENTRENAMIENTO Pautas para desarrollar los siguientes ejercicios: De acuerdo a los conceptos estudiados y a investigación previa desarrollar los siguientes ítems: 1) Realizar una lista de tres elementos sólidos, tres líquidos y tres gaseosos. 2) Explicar ¿Cómo está estructurado un átomo? 3) ¿Se puede cargar eléctricamente cualquier objeto? Si o No y ¿Por qué? 4) Explique la interacción entre un objeto cargado y otro neutro. 5) Dar ejemplos de ¿cómo pueden pasar los electrones de un cuerpo a otro? 6) Explicar el funcionamiento de una hidroeléctrica. 7) Explicar el funcionamiento de una central eólica. 8) Explique ¿Qué pasa al utilizar un semiconductor como medio de transmisión de la corriente eléctrica? 9) ¿Puede existir corriente sin que haya voltaje? Si o No y ¿Por qué? 10) ¿Puede existir voltaje sin que haya corriente? Si o No y ¿Por qué? Hallar la RT para cada una de las siguientes conexiones (Mostrar procedimiento) Arquitectura de Sistemas Digitales 33 1) Dónde: R1 = 8900 Ω R2 = 3.5 kΩ R3 = 4.7 KΩ R4 = 5600 Ω 2) Dónde: R1 = 20 KΩ R2 = 3300 Ω R3 = 1000 Ω R4 = 5.7 KΩ 3) Arquitectura de Sistemas Digitales 34 Dónde: R1 = 150 Ω R2 = 360 Ω R3 = 7400 Ω R4 = 1 KΩ R5 = 4.7 KΩ Resolver los siguientes ejercicios (Mostrar procedimiento): 1) Se quiere determinar la longitud de un material de Carbón de 0.75 mm de radio. La resistencia es 0.04 Ω. 2) ¿Cuál será la sección de un material de Maillechort de 800 cm de longitud si posee una resistencia de 0?000003 MΩ? 3) ¿Qué resistencia tendrá un material de Zinc de 9?8 Km de longitud y 3 mm de diámetro Arquitectura de Sistemas Digitales 35 2 UNIDAD 2 TIPOS DE CIRCUITOS BÁSICOS Y LAS LEYES DE LA ELECTRICIDAD Video: Potencia Eléctrica ”Ver Video”:https://www.youtube.com/watch?v=b8u04SSyoQc&feature=related Video: Ley de Joule ”Ver Video”:https://www.youtube.com/watch?v=aYNjnSx9NUY&feature=related Arquitectura de Sistemas Digitales 36 Circuito eléctrico: Es la conexión por medio de conductores de elementos como: Fuente de alimentación, resistencias bobinas, diodos, transistores que van a utilizar la corriente eléctrica para cumplir un objetivo determinado. Circuito mixto: Es un circuito donde se combinan las conexiones serie y paralelo. Circuito paralelo: Es un circuito donde todos los componentes coinciden entre sus terminales. Circuito serie: Es un circuito en el cual los elementos forman una sola trayectoria. Corriente alterna: Es aquella que cambia su magnitud y dirección con el tiempo. Se mueve de una dirección a otra en un período de tiempo dado. Corriente continua: Es aquella que idealmente no cambia con el tiempo; además fluye en una sola dirección. Frecuencia: Es el número de ciclos en un período de tiempo dado (Cantidad de veces que se repite la señal) Ley: Es una proposición científica en la que se afirma una relación constante entre dos o más variables, cada una de las cuales representa una propiedad. Ley de Joule: Ley que relaciona a las leyes de ohm y watt. Ley de Ohm: Ley que relaciona al voltaje, la corriente y la resistencia. Ley de Watt: Ley que relaciona al voltaje, la corriente y la potencia. Período: Es el tiempo que dura un ciclo de la señal. También es lo que se demora la señal en completarse. Voltaje eficaz: Es el valor del voltaje equivalente en DC. Voltaje pico: Es el valor máximo tomado desde el eje de referencia (eje del tiempo) hasta el pico positivo o pico negativo. Voltaje pico a pico: Es el valor absoluto del voltaje entre el pico positivo y el pico negativo. Arquitectura de Sistemas Digitales 37 2.1 TEMA 1 EL CIRCUITO ELÉCTRICO Un circuito eléctrico básico está formado por: Fuente de alimentación (Voltaje), conductores (Alambre) y elementos (resistencias, condensadores, bobinas, diodos, transistores) que van a utilizar la corriente eléctrica para cumplir un objetivo determinado. Por ejemplo: Encender un bombillo, controlar el sentido de giro de un motor; entre otros. 2.2 TEMA 2 LEYES PARA CIRCUITOS Existen diferentes leyes que permiten relacionar el voltaje, la corriente, la resistencia y la potencia. Estas leyes son: 2.2.1 LEY DE OHM Fue desarrollada por el físico alemán Georg Simón Ohm (1787 - 1854) en el año de 1827. Relaciona Voltaje, Corriente y Resistencia mediante: 𝑽= 𝑰×𝑹 𝑰= 𝑽 𝑹 𝑹= 𝑽 𝑰 En donde: 𝑰: Intensidad en amperios (A) 𝑽: Voltaje en voltios (V) 𝑹: Resistencia en ohmios (Ω). Como regla nemotécnica para recordar se utiliza el siguiente triángulo: Arquitectura de Sistemas Digitales 38 Autoría propia Se tapa con el dedo la variable que se quiere encontrar. 2.2.2 EJERCICIOS DE APRENDIZAJE 1) Si en un circuito eléctrico la tensión tiene un valor de 110 v y la resistencia un valor de 30 Ω ¿cuál será el valor de la intensidad? Solución. Se debe determinar la corriente eléctrica a partir de la expresión 𝑰= 𝑽 𝑹 Como las magnitudes están en sus unidades fundamentales se procede a determinar la corriente eléctrica Datos: 𝑹 = 30 Ω 𝑽 = 110 𝑣 Reemplazando en Arquitectura de Sistemas Digitales 39 𝑰= 𝐼= 𝑽 𝑹 110 30 𝐼= 𝑉 𝑅 𝐼 = 3,67 𝐴 2) Un motor posee una resistencia interna de 0.000035 MΩ por la cual circula una corriente de 61mA. Determinar la tensión aplicada. Solución. Se debe determinar el voltaje a partir de la expresión 𝑽= 𝑰×𝑹 Antes de reemplazar se deben llevar las magnitudes a sus unidades fundamentales. Como la resistencia está en MΩ; multiplicamos por 1000000 para pasarla a Ω 0,000035 × 1000000 = 35 Con ello se tiene que 𝑅 = 35 Ω De igual forma como la corriente está en mA; dividimos entre 1000 para pasarla a A 61 ÷ 1000 = 0,061 Con ello se tiene que 𝐼 = 0,061 𝐴 Con esto se procede a calcular el voltaje requerido. Datos: 𝑹 = 35 Ω 𝑰 = 0,061 𝐴 Arquitectura de Sistemas Digitales 40 Reemplazando en 𝑽= 𝑰×𝑹 𝑉 = 0,061 × 35 𝑉 = 2,135 𝑣 2.2.3 LEY DE WATT La ley de Watt relaciona potencia, voltaje y corriente mediante: 𝑷= 𝑽×𝑰 𝑰= 𝑷 𝑽 𝑽= 𝑷 𝑰 En donde: 𝑰: Intensidad en amperios (A) 𝑽: Voltaje en voltios (V) 𝑷: Potencia en vatios (W) Como regla nemotécnica para recordar se utiliza el siguiente triángulo: Arquitectura de Sistemas Digitales 41 Autoría propia Se tapa con el dedo la variable que se quiere encontrar. 2.2.4 EJERCICIOS DE APRENDIZAJE 1) Una lámpara incandescente trabaja a 120 v y 100 W. ¿Cuál será la intensidad? Solución. Se debe determinar la corriente eléctrica a partir de la expresión 𝑰= 𝑷 𝑽 Como las magnitudes están en sus unidades fundamentales se procede a determinar la corriente eléctrica Datos: 𝑷 = 100 𝑊 𝑽 = 120 𝑣 Reemplazando en 𝑰= 𝑷 𝑽 Arquitectura de Sistemas Digitales 42 𝐼= 100 120 𝐼 = 0,83 𝐴 2) Un transformador trabaja a 0.000120 Mv por el cual circula una corriente de 470000µA. Determinar la potencia Solución Se debe determinar la potencia a partir de la expresión 𝑷= 𝑽×𝑰 Antes de reemplazar se deben llevar las magnitudes a sus unidades fundamentales. Como el voltaje está en Mv; multiplicamos por 1000000 para pasarlo a v 0,000120 × 1000000 = 120 Con ello se tiene que 𝑉 = 120 𝑣 De igual forma como la corriente está en µA; dividimos entre 1000000 para pasarla a A 470000 ÷ 1000000 = 0,47 Con ello se tiene que 𝐼 = 0,47 𝐴 Con esto se procede a calcular la potencia requerida Datos: 𝑽 = 120 𝑣 𝑰 = 0,47 𝐴 Reemplazando en 𝑷= 𝑽×𝑰 Arquitectura de Sistemas Digitales 43 𝑃 = 120 × 0,47 𝑃 = 56,4 𝑊 2.2.5 LEY DE JOULE Relaciona las leyes de Ohm y Watt. 1. Ley de Ohm 𝑽= 𝑰×𝑹 2. Ley de Watt 𝑷= 𝑽×𝑰 Reemplazando la ley de Ohm en la ley de Watt se tiene: 𝑃 = 𝑉×𝐼 𝑃 =(𝐼 ×𝑅)×𝐼 𝑷 = 𝑰𝟐 × 𝑹 llamada Ley de Joule De ésta expresión se tiene también: 𝑰= √ 𝑹= También se puede obtener: Si en la ley de Watt 𝑷 𝑹 𝑷 𝑰𝟐 Arquitectura de Sistemas Digitales 44 𝑃 = 𝑉×𝐼 se reemplaza el valor de I por 𝐼= 𝑉 𝑅 se tiene que: 𝑃= 𝑉× 𝑉 𝑅 𝑽𝟐 𝑷= 𝑹 De ésta expresión se tiene también: 𝑽 = √𝑷 × 𝑹 𝑽𝟐 𝑹= 𝑷 2.2.6 EJERCICIOS DE APRENDIZAJE 1) Calcular la potencia que suministra una resistencia de 3 KΩ cuando se le aplica una tensión de 100 v. Solución. Se debe determinar la potencia a partir de la expresión 𝑽𝟐 𝑷= 𝑹 Antes de reemplazar se deben llevar las magnitudes a sus unidades fundamentales. Como la resistencia está en KΩ; multiplicamos por 1000 para pasarla a Ω 3 × 1000 = 3000 Arquitectura de Sistemas Digitales 45 Con ello se tiene que 𝑅 = 3000 Ω Con esto se procede a calcular la potencia requerida Datos: 𝑽 = 100 𝑣 𝑹 = 3000 Ω Reemplazando en 𝑽𝟐 𝑷= 𝑹 1002 𝑃= 3000 𝑃= 10000 3000 𝑃 = 3,33 𝑊 2) ¿Qué tensión se le debe aplicar a una resistencia de 144 Ω, cuando la potencia es de 0,1KW? Solución. Se debe determinar el voltaje a partir de la expresión 𝑽 = √𝑷 × 𝑹 Antes de reemplazar se deben llevar las magnitudes a sus unidades fundamentales. Como la potencia está en KW; multiplicamos por 1000 para pasarla a W 0,1 × 1000 = 100 Con ello se tiene que 𝑃 = 100 𝑊 Con esto se procede a calcular el voltaje requerido Arquitectura de Sistemas Digitales 46 Datos: 𝑷 = 100 𝑊 𝑹 = 144 Ω Reemplazando en 𝑉 = √𝑃 × 𝑅 𝑉 = √100 × 144 𝑉 = √14400 𝑉 = √100 × 144 𝑉 = 120 𝑣 Nota: Al Utilizar las leyes de Ohm, Watt y Joule las cantidades deben expresarse en las unidades fundamentales de Intensidad (amperios), voltaje (voltios), resistencia (ohmio) y potencia (varios). Si se da una cantidad en múltiplos o submúltiplos, como sugerencia se debe realizar la conversión a las unidades fundamentales antes de realizar el (los) reemplazo(s) Arquitectura de Sistemas Digitales 47 2.3 TEMA 3 TEORÍA DE LA CORRIENTE CONTINUA Y LA CORRIENTE ALTERNA Corriente continua. Es aquella que idealmente no cambia con el tiempo; además fluye en una sola dirección. A la corriente continua también se le llama corriente directa. Se representa como CC y DC. La corriente continua no cambia su magnitud ni su dirección con el tiempo. La corriente continua se produce a partir de una fuente de voltaje como: Batería, pila, fuente de alimentación. La necesidad de la corriente continua radica en que la mayoría de aparatos electrónicos trabajan con ella. Autoría propia Corriente alterna. Es aquella que cambia su magnitud y dirección con el tiempo. Se mueve de una dirección a otra en un período de tiempo dado. La forma de onda de la corriente alterna más comúnmente utilizada es la de una onda sinusoidal. Se representa como AC. Arquitectura de Sistemas Digitales 48 Autoría propia Características de la corriente alterna Voltaje pico (Vp) Es el valor máximo tomado desde el eje de referencia (eje del tiempo) hasta el pico positivo o pico negativo. Voltaje pico a pico. (Vpp) Voltaje eficaz. (Vrms) Es el valor absoluto del voltaje entre el pico positivo y el pico negativo. Se denomina también raíz cuadrática media (root mean square) de También se AC. puede calcular El voltaje eficaz como: es el valor del 𝑽𝒑𝒑 = voltaje 𝟐 |𝑽𝒑 | equivalente en DC. Para calcular el 𝑉𝑟𝑚𝑠 de una Período (T) Es el tiempo que dura un ciclo de la señal. También es lo que se demora la señal en completarse. Se representa por T. La unidad fundamental es el segundo; representado por S. Frecuencia (F) Es el número de ciclos en un período de tiempo dado (Cantidad de veces que se repite la señal) Se representa por F. La unidad fundamental es el Hertz; representado por Hz. Conociendo la frecuencia de la Arquitectura de Sistemas Digitales señal sinusoidal se tiene: 49 𝑽𝒓𝒎𝒔 = 𝑽𝑷 √𝟐 En el gráfico: 𝑉𝑝 = 4 𝑣 𝑽𝒑𝒑 = 𝟐 |𝑽𝒑 | 𝑉𝑝𝑝 = 2 |4 | 𝑉𝑝𝑝 = 8 𝑣 𝑽𝒓𝒎𝒔 = 𝑉𝑟𝑚𝑠 = 𝑽𝑷 √𝟐 4 √2 𝑉𝑟𝑚𝑠 = 2.83 𝑣 Este sería el voltaje equivalente en DC de la señal de sinusoidal. señal de podemos calcular período viceversa mediante: 𝑻= 𝟏 𝑭 𝑭= 𝟏 𝑻 AC el y Arquitectura de Sistemas Digitales 50 2.3.1 EJERCICIO DE APRENDIZAJE Hallar: a) 𝑉𝑝 b) 𝑉𝑝𝑝 c) 𝑉𝑟𝑚𝑠 d) 𝑇 e) 𝐹 Autoría propia Solución a) Como 𝑉𝑝 es el valor máximo tomado desde el eje de referencia (eje del tiempo) hasta el pico positivo o pico negativo; en el gráfico se observa que 𝑉𝑝 = 110 𝑣 b) Se procede a calcular 𝑉𝑝𝑝 𝑽𝒑𝒑 = 𝟐 |𝑽𝒑 | Arquitectura de Sistemas Digitales 𝑉𝑝𝑝 = 2 |110 | 51 𝑉𝑝𝑝 = 220 𝑣 c) Se procede a calcular 𝑉𝑟𝑚𝑠 𝑽𝑷 𝑽𝒓𝒎𝒔 = 𝑉𝑟𝑚𝑠 = √𝟐 110 √2 𝑉𝑟𝑚𝑠 = 77.78 𝑣 d) Como 𝑇 es el tiempo que dura un ciclo de la señal; en el gráfico se observa que 𝑇 = 2 𝑚𝑠 e) Se procede a calcular 𝐹 𝑭= 𝟏 𝑻 Antes de reemplazar se deben llevar las magnitudes a sus unidades fundamentales. Como el período está en ms; dividimos entre 1000 para pasarlo a S 2 ÷ 1000 = 0,002 Con ello se tiene que 𝑇 = 0,002 𝑆 Con esto se procede a calcular la frecuencia requerida 𝑭= 𝐹= 𝟏 𝑻 1 0,002 Arquitectura de Sistemas Digitales 𝐹 = 500 𝐻𝑧 52 2.4 TEMA 4 CIRCUITOS DE CORRIENTE CONTINUA 2.4.1 CIRCUITO SERIE Es un circuito en el cual los elementos están conectados en serie. Características La resistencia total es: 𝑹𝑻 = 𝑹𝟏 + 𝑹𝟐 + 𝑹𝟑 + … La corriente es la misma para todos los elementos. Ésta corriente es la que suministra la fuente de voltaje (Corriente total) Se cumple 𝑰𝑻 = 𝑰𝑹𝟏 = 𝑰𝑹𝟐 = 𝑰𝑹𝒏 El voltaje de la fuente se distribuye entre cada uno de los elementos que componen al circuito eléctrico. Se cumple 𝑽𝑻 = 𝑽𝑹𝟏 + 𝑽𝑹𝟐 + 𝑽𝑹𝟑 + … La potencia de suministro de la fuente se distribuye entre cada uno de los elementos que componen al circuito eléctrico. Se cumple 𝑷𝑻 = 𝑷𝑹𝟏 + 𝑷𝑹𝟐 + 𝑷𝑹𝟑 + … Arquitectura de Sistemas Digitales 53 2.4.2 EJERCICIO DE APRENDIZAJE Hallar: 𝑉𝑇 , 𝐼𝑇 , 𝑅𝑇 , 𝑃𝑇 , 𝑉𝑅1 , 𝑉𝑅2 , 𝑉𝑅3 , 𝐼𝑅1 , 𝐼𝑅2 , 𝐼𝑅3 , 𝑃𝑅1 , 𝑃𝑅2 , 𝑃𝑅3 Autoría propia Solución. Como todas las resistencias están en Ω se procede a determinar las magnitudes requeridas. Se tiene que: 𝑹𝟏 = 100 Ω 𝑹𝟐 = 330 Ω 𝑹𝟑 = 890 Ω a) El voltaje total es: 𝑉𝑇 = 30 𝑣 b) La resistencia total es: 𝑹𝑻 = 𝑹𝟏 + 𝑹𝟐 + 𝑹𝟑 𝑅𝑇 = 100 + 330 + 890 𝑅𝑇 = 1320 Ω Arquitectura de Sistemas Digitales 54 c) La corriente total es: 𝑰𝑻 = 𝐼𝑇 = 𝑽𝑻 𝑹𝑻 30 1320 𝐼𝑇 = 0,0227 𝐴 d) La potencia total es: 𝑷𝑻 = 𝑽𝑻 × 𝑰𝑻 𝑃𝑇 = 30 × 0,0227 𝑃𝑇 = 0,681 𝑊 e) Para las corrientes en cada resistencia se cumple que 𝑰𝑻 = 𝑰𝑹𝟏 = 𝑰𝑹𝟐 = 𝑰𝑹𝟑 𝐼𝑅1 = 0,0227 𝐴 𝐼𝑅2 = 0,0227 𝐴 𝐼𝑅3 = 0,0227 𝐴 f) Para los voltajes en cada resistencia se utiliza la ley de Ohm. 𝑽= 𝑰×𝑹 𝑉𝑅1 = 𝐼𝑅1 × 𝑅1 𝑉𝑅1 = 0,0227 × 100 Arquitectura de Sistemas Digitales 55 𝑉𝑅1 = 2,27 𝑣 𝑉𝑅2 = 𝐼𝑅2 × 𝑅2 𝑉𝑅2 = 0,0227 × 330 𝑉𝑅2 = 7,491 𝑣 𝑉𝑅3 = 𝐼𝑅3 × 𝑅3 𝑉𝑅3 = 0,0227 × 890 𝑉𝑅3 = 20,203 𝑣 Se comprueba que 𝑽𝑻 = 𝑽𝑹𝟏 + 𝑽𝑹𝟐 + 𝑽𝑹𝟑 𝑉𝑇 = 2,27 + 7,491 + 20,203 𝑉𝑇 = 29,964 𝑣 g) Para las potencias en cada resistencia se utiliza la ley de Watt 𝑷= 𝑽×𝑰 𝑃𝑅1 = 𝑉𝑅1 × 𝐼𝑅1 𝑃𝑅1 = 2,27 × 0,0227 𝑃𝑅1 = 0,0515 𝑊 𝑃𝑅2 = 𝑉𝑅2 × 𝐼𝑅2 𝑃𝑅2 = 7,491 × 0,0227 Arquitectura de Sistemas Digitales 𝑃𝑅2 = 0,170 𝑊 56 𝑃𝑅3 = 𝑉𝑅3 × 𝐼𝑅3 𝑃𝑅3 = 20,203 × 0,0227 𝑃𝑅3 = 0,459 𝑊 Se comprueba que 𝑷𝑻 = 𝑷𝑹𝟏 + 𝑷𝑹𝟐 + 𝑷𝑹𝟑 𝑃𝑇 = 0,0515 + 0,170 + 0,459 𝑃𝑇 = 0,681 𝑊 2.4.3 CIRCUITO PARALELO Es un circuito en el cual los elementos están conectados en paralelo. Características La resistencia total es: 𝑹𝑻 = 𝟏 𝟏 𝟏 𝟏 + + + … 𝑹𝟏 𝑹𝟐 𝑹𝟑 El voltaje es el mismo para todos los elementos. Éste voltaje es el que suministra la fuente de alimentación (Voltaje total) Se cumple 𝑽𝑻 = 𝑽𝑹𝟏 = 𝑽𝑹𝟐 = 𝑽𝑹𝒏 Arquitectura de Sistemas Digitales 57 La corriente que suministra la fuente se distribuye entre cada uno de los elementos que componen al circuito eléctrico. Se cumple 𝑰𝑻 = 𝑰𝑹𝟏 + 𝑰𝑹𝟐 + 𝑰𝑹𝟑 + … La potencia de suministro de la fuente se distribuye entre cada uno de los elementos que componen al circuito eléctrico. Se cumple 𝑷𝑻 = 𝑷𝑹𝟏 + 𝑷𝑹𝟐 + 𝑷𝑹𝟑 + … 2.4.4 EJERCICIO DE APRENDIZAJE Hallar: 𝑉𝑇 , 𝐼𝑇 , 𝑅𝑇 , 𝑃𝑇 , 𝑉𝑅1 , 𝑉𝑅2 , 𝑉𝑅3 , 𝐼𝑅1 , 𝐼𝑅2 , 𝐼𝑅3 , 𝑃𝑅1 , 𝑃𝑅2 , 𝑃𝑅3 Autoría propia Solución. Como todas las resistencias están en Ω se procede a determinar las magnitudes requeridas. Arquitectura de Sistemas Digitales 58 Se tiene que: 𝑹𝟏 = 100 Ω 𝑹𝟐 = 330 Ω 𝑹𝟑 = 890 Ω a) El voltaje total es: 𝑉𝑇 = 10 𝑣 b) La resistencia total es: 𝑹𝑻 = 𝑅𝑇 = 𝑅𝑇 = 𝟏 𝟏 𝟏 𝟏 + + 𝑹𝟏 𝑹𝟐 𝑹𝟑 1 1 1 1 + + 100 330 890 1 0,01 + 0,00303 + 0,00112 𝑅𝑇 = 1 0,0142 𝑅𝑇 = 70,423 Ω c) La corriente total es: 𝑰𝑻 = 𝐼𝑇 = 𝑽𝑻 𝑹𝑻 10 70,423 𝐼𝑇 = 0,142 𝐴 d) La potencia total es: Arquitectura de Sistemas Digitales 59 𝑷𝑻 = 𝑽𝑻 × 𝑰𝑻 𝑃𝑇 = 10 × 0,142 𝑃𝑇 = 1,42 𝑊 e) Para los voltajes en cada resistencia se cumple que 𝑽𝑻 = 𝑽𝑹𝟏 = 𝑽𝑹𝟐 = 𝑽𝑹𝟑 𝑉𝑅1 = 10 𝑣 𝑉𝑅2 = 10 𝑣 𝑉𝑅3 = 10 𝑣 f) Para las corrientes en cada resistencia se utiliza la ley de Ohm. 𝑰= 𝑽 𝑹 𝐼𝑅1 = 𝑉𝑅1 𝑅1 𝐼𝑅1 = 10 100 𝐼𝑅1 = 0,1 𝐴 𝐼𝑅2 = 𝑉𝑅2 𝑅2 𝐼𝑅2 = 10 330 𝐼𝑅2 = 0,0303 𝐴 Arquitectura de Sistemas Digitales 60 𝐼𝑅3 = 𝑉𝑅3 𝑅3 𝐼𝑅3 = 10 890 𝐼𝑅3 = 0,0112 𝐴 Se comprueba que 𝑰𝑻 = 𝑰𝑹𝟏 + 𝑰𝑹𝟐 + 𝑰𝑹𝟑 𝐼𝑇 = 0,1 + 0,0303 + 0,0112 𝐼𝑇 = 0,142 𝐴 g) Para las potencias en cada resistencia se utiliza la ley de Watt 𝑷= 𝑽×𝑰 𝑃𝑅1 = 𝑉𝑅1 × 𝐼𝑅1 𝑃𝑅1 = 10 × 0,1 𝑃𝑅1 = 1 𝑊 𝑃𝑅2 = 𝑉𝑅2 × 𝐼𝑅2 𝑃𝑅2 = 10 × 0,0303 𝑃𝑅2 = 0,303 𝑊 𝑃𝑅3 = 𝑉𝑅3 × 𝐼𝑅3 𝑃𝑅3 = 10 × 0,0112 𝑃𝑅3 = 0,112 𝑊 Arquitectura de Sistemas Digitales 61 Se comprueba que 𝑷𝑻 = 𝑷𝑹𝟏 + 𝑷𝑹𝟐 + 𝑷𝑹𝟑 𝑃𝑇 = 1 + 0,303 + 0,112 𝑃𝑇 = 1,415 𝑊 2.4.5 CIRCUITO MIXTO Es un circuito en el cual los elementos están conectados en combinaciones serie - paralelo. 2.4.6 EJERCICIO DE APRENDIZAJE Hallar: 𝑉𝑇 , 𝐼𝑇 , 𝑅𝑇 , 𝑃𝑇 , 𝑉𝑅1 , 𝑉𝑅2 , 𝑉𝑅3 , 𝐼𝑅1 , 𝐼𝑅2 , 𝐼𝑅3 , 𝑃𝑅1 , 𝑃𝑅2 , 𝑃𝑅3 Autoría propia Solución. Como todas las resistencias están en Ω se procede a determinar las magnitudes requeridas. Se tiene que: 𝑹𝟏 = 100 Ω 𝑹𝟐 = 330 Ω Arquitectura de Sistemas Digitales 62 𝑹𝟑 = 890 Ω a) El voltaje total es: 𝑉𝑇 = 10 𝑣 b) La resistencia total es: 𝑅𝑇1 ( 𝑅2 está en paralelo con 𝑅3 ) Se utiliza la expresión para dos resistores en paralelo 𝑹𝑻𝟏 = 𝑅𝑇1 = 𝑹 𝟐 . 𝑹𝟑 𝑹𝟐 + 𝑹𝟑 330 . 890 330 + 890 𝑅𝑇1 = 293700 1220 𝑅𝑇1 = 240,738 Ω El esquema queda Autoría propia Arquitectura de Sistemas Digitales 63 𝑅𝑇 (𝑅𝑇1 está en serie con 𝑅1 ) 𝑹𝑻 = 𝑹𝑻𝟏 + 𝑹𝟏 𝑅𝑇 = 240,738 + 100 𝑅𝑇 = 340,738 Ω c) La corriente total es: 𝑰𝑻 = 𝐼𝑇 = 𝑽𝑻 𝑹𝑻 10 340,738 𝐼𝑇 = 0,0293 𝐴 d) La potencia total es: 𝑷𝑻 = 𝑽𝑻 × 𝑰𝑻 𝑃𝑇 = 10 × 0,0293 𝑃𝑇 = 0,293 𝑊 e) Como 𝑅𝑇1 está en serie con 𝑅1 se cumple que 𝑰𝑻 = 𝑰𝑹𝑻𝟏 = 𝑰𝑹𝟏 𝐼𝑅𝑇1 = 0,0293 𝐴 𝐼𝑅1 = 0,0293 𝐴 Utilizando la ley de Ohm y la ley de Watt se obtienen el voltaje y la potencia para 𝑅1 𝑽= 𝑰×𝑹 Arquitectura de Sistemas Digitales 𝑉𝑅1 = 𝐼𝑅1 × 𝑅1 64 𝑉𝑅1 = 0,0293 × 100 𝑉𝑅1 = 2,93 𝑣 𝑷= 𝑽×𝑰 𝑃𝑅1 = 𝑉𝑅1 × 𝐼𝑅1 𝑃𝑅1 = 2,93 × 0,0293 𝑃𝑅1 = 0,0858 𝑊 Como 𝑅𝑇1 reemplaza a 𝑅2 que está en paralelo con 𝑅3 ambas resistencias tienen el mismo voltaje. Así al encontrar el voltaje de 𝑅𝑇1 se determina el voltaje de ambas resistencias. 𝑉𝑅𝑇1 = 𝐼𝑅𝑇1 × 𝑅𝑇1 𝑉𝑅𝑇1 = 0,0293 × 240,738 𝑉𝑅𝑇1 = 7,054 𝑣 Con ello: 𝑉𝑅2 = 7,054 𝑣 𝑉𝑅3 = 7,054 𝑣 Utilizando la ley de Ohm y la ley de Watt se obtienen el voltaje y la potencia para 𝑅2 y 𝑅3 𝐼𝑅2 = 𝐼𝑅2 = 𝑉𝑅2 𝑅2 7,054 330 𝐼𝑅2 = 0,0214 𝐴 Arquitectura de Sistemas Digitales 65 𝐼𝑅3 = 𝐼𝑅3 = 𝑉𝑅3 𝑅3 7,054 890 𝐼𝑅3 = 0,00793 𝐴 𝑃𝑅2 = 𝑉𝑅2 × 𝐼𝑅2 𝑃𝑅2 = 7,054 × 0,0214 𝑃𝑅2 = 0,151 𝑊 𝑃𝑅3 = 𝑉𝑅3 × 𝐼𝑅3 𝑃𝑅3 = 7,054 × 0,00793 𝑃𝑅3 = 0,0559 𝑊 Se comprueba que 𝑷𝑻 = 𝑷𝑹𝟏 + 𝑷𝑹𝟐 + 𝑷𝑹𝟑 𝑃𝑇 = 0,0858 + 0,151 + 0,0559 𝑃𝑇 = 0,293 𝑊 2.4.7 EJERCICIOS DE ENTRENAMIENTO Pautas para desarrollar los siguientes ejercicios: Resolver cada uno de los siguientes enunciados: 1) Se tiene un circuito que trabaja a 15 V, y lo conectamos a una resistencia de 89 Ω. Hallar: a) Intensidad. b) Potencia. 2) Se tiene una resistencia de 30 Ω por la cual circula una corriente de 0.065 mA. Arquitectura de Sistemas Digitales 66 Hallar: a) Tensión. b) Potencia. 3) Un bombillo de 0.7Kw trabaja a 110 V. Hallar: a) Resistencia. b) Intensidad. 4) Un circuito entrega una potencia de 10 W sobre una carga de 6 Ω. Hallar: a) Tensión. b) Intensidad. 5) Un motor trabaja a 220 V. La corriente que circula por él es de 2300 mA. Hallar: a) Potencia. b) Resistencia. Resolver los siguientes circuitos: 1) Hallar: 𝑉𝑇 , 𝐼𝑇 , 𝑅𝑇 , 𝑃𝑇 , 𝑉𝑅1 , 𝑉𝑅2 , 𝑉𝑅3 , 𝐼𝑅1 , 𝐼𝑅2 , 𝐼𝑅3 , 𝑃𝑅1 , 𝑃𝑅2 , 𝑃𝑅3 Dónde: Arquitectura de Sistemas Digitales 67 V = 30 v R1 = 1800 Ω R2 = 8600 Ω R3 = 4700 Ω 2) Hallar: 𝑉𝑇 , 𝐼𝑇 , 𝑅𝑇 , 𝑃𝑇 , 𝑉𝑅1 , 𝑉𝑅2 , 𝑉𝑅3 , 𝐼𝑅1 , 𝐼𝑅2 , 𝐼𝑅3 , 𝑃𝑅1 , 𝑃𝑅2 , 𝑃𝑅3 Dónde: V = 12 v R1 = 4700 Ω R2 = 9800 Ω R3 = 1400 Ω 3) Hallar: 𝑉𝑇 , 𝐼𝑇 , 𝑅𝑇 , 𝑃𝑇 , 𝑉𝑅1 , 𝑉𝑅2 , 𝑉𝑅3 , 𝐼𝑅1 , 𝐼𝑅2 , 𝐼𝑅3 , 𝑃𝑅1 , 𝑃𝑅2 , 𝑃𝑅3 Arquitectura de Sistemas Digitales 68 Dónde: V = 24 v R1 = 3300 Ω R2 = 1000 Ω R3 = 8900 Ω Ejercicio. La señal que se muestra posee 𝑉𝑟𝑚𝑠 = 110 𝑣 y 𝐹 = 60 𝐻𝑧 Hallar: a) 𝑉𝑝 b) 𝑉𝑝𝑝 c) 𝑇 Arquitectura de Sistemas Digitales 69 3 UNIDAD 3 ELEMENTOS ELECTRÓNICOS Video: Componentes electrónicos básicos ”Ver Video”: https://www.youtube.com/watch?v=fEt91M_Ry88 Capacitor: Es un elemento que almacena energía en forma de campo eléctrico. También se denomina condensador. Circuito integrado: Es un circuito compuesto de resistencias, condensadores, transistores y diodos. Circuito integrado 555: Es un circuito que se utiliza en la generación de temporizadores, pulsos y oscilaciones. Diodo: Es un elemento que permite la circulación de la corriente eléctrica a través de él en un solo sentido. Inductor: Es un elemento que almacena energía en forma de campo magnético. También se denomina bobina. Transformador: Es un elemento que permite aumentar o disminuir la tensión en un circuito eléctrico de corriente alterna. Transistor: Es un elemento utilizado para entregar una señal de salida en respuesta a una señal de entrada. Arquitectura de Sistemas Digitales 70 3.1 TEMA 1 EL CAPACITADOR 3.1.1 GENERALIDADES El capacitor es un elemento que almacena energía en forma de un campo eléctrico. Al capacitor también se la llama condensador. Se llama capacitancia o capacidad de un condensador a la cantidad de cargas eléctricas que es capaz de almacenar. El condensador está formado por dos placas separadas por un material aislante llamado dieléctrico. (Evita el cortocircuito ya que las placas adquieren carga eléctrica opuesta) Se manejan diferentes materiales y formas para su construcción. Tomado de: https://www.flickr.com/photos/oskay/437339684 El condensador o capacitor se representa por la letra C. La unidad fundamental de medida es el Faradio el cual se representa por F. Para la capacitancia sólo se manejan submúltiplos como: MiliFaradio (mF) MicroFaradio (µF) NanoFaradio (nF) PicoFaradio (cf.) Arquitectura de Sistemas Digitales 71 Los capacitores se dividen en: Fijos. Variables. Fijos. Son aquellos que poseen un valor constante de capacitancia. Estos a su vez se dividen en: Polarizados o electrolíticos. No polarizados. Electrolíticos Son aquellos que poseen polaridad. (Terminal positivo y terminal negativo) Se clasifican según el material en: De Aluminio De Tantalio. No polarizados. Son aquellos que no poseen polaridad con lo cual no es necesario fijarse como se ubican en un circuito. Se clasifican según el material en: Poliéster Mica Cerámica Papel Variables. Son aquellos que pueden tomar muchos valores de capacitancia dentro de un rango determinado. Se clasifican según el dieléctrico en: Dieléctrico de aire. Dieléctrico de mica. Arquitectura de Sistemas Digitales 72 Símbolos para condensadores No polarizados Autoría propia Polarizados Variables. Autoría propia Autoría propia Las principales características eléctricas de un condensador son su capacitancia y el voltaje máximo entre placas que puede soportar sin dañarse. 3.2 TEMA 2 EL INDUCTOR 3.2.1 GENERALIDADES El inductor es un elemento que almacena energía en forma de campo magnético. Al inductor también se le conoce como bobina. Una bobina es un arrollamiento de cobre. La bobina tiene la propiedad de oponerse a los cambios en la corriente que circula por ella. Ésta oposición se denomina inductancia. Arquitectura de Sistemas Digitales 73 Tomado de: https://www.flickr.com/photos/oskay/437342545/in/photolist Tomado de: https://www.flickr.com/photos/cpradi/4490270063/in/photolist La bobina o inductor se representa por la letra L. La unidad fundamental de medida es el Henrio el cual se representa por H. La inductancia maneja submúltiplos como: MiliHenrio (mH) MicroHenrio (µH) Arquitectura de Sistemas Digitales 74 También se manejan valores en henrios. Los inductores se dividen según el tipo de núcleo en: Inductores con núcleo de aire. Inductores con núcleo de hierro. Inductores con núcleo de ferrita. Los inductores también se pueden fabricar con inductancia fija o variable. Símbolos para bobinas General Autoría propia Con núcleo de hierro. Con núcleo de ferrita. Autoría propia Autoría propia Variable. Autoría propia 3.2.2 EL TRANSFORMADOR 3.2.2.1 GENERALIDADES Elemento que transforma la corriente alterna; es decir la reduce, la eleva o mantiene la amplitud sin cambiar la frecuencia de la señal. El transformador se basa en el fenómeno de la inducción electromagnética. Está formado por dos bobinas devanadas sobre un núcleo de hierro. Las bobinas se denominan primario (Entrada) y secundario (Salida). Hay transformadores con múltiples devanados de salida. Arquitectura de Sistemas Digitales 75 Tomado de: http://yak-prosto.com/yak-zrobiti-stabilizator-naprugi/ El transformador se divide en: Elevador La señal de salida es mayor a la señal de entrada. Reductor La señal de salida es menor a la señal de entrada. Aislamiento La señal de salida es igual a la señal de entrada. Se utiliza como medio de protección. Arquitectura de Sistemas Digitales 76 Símbolo general para el transformador. Autoría propia 3.3 TEMA 3 EL DIODO 3.3.1 GENERALIDADES Es un dispositivo semiconductor que permite el paso de la corriente eléctrica en una única dirección. Algunos se emplean para la conversión de corriente alterna a corriente continua; la cual es su aplicación más importante. Símbolo del diodo Autoría propia Arquitectura de Sistemas Digitales 77 Donde: A: ánodo (Terminal positivo) C: cátodo (Terminal negativo) El diodo debe conectarse en la posición correcta (Ánodo con terminal positivo y Cátodo con terminal negativo correspondientes a la fuente de alimentación) ya que tiene polaridad. Los principales tipos de diodos son: Diodo rectificador. Diodo zener. LED (Diodo emisor de luz) SCR (Rectificador controlado de silicio) Fotodiodo. Tomado de: https://www.flickr.com/photos/free-stock/4791854132 Arquitectura de Sistemas Digitales 78 Tomado de: https://www.flickr.com/photos/joeseggiola/2722930520 3.4 TEMA 4 EL TRANSISTOR 3.4.1 GENERALIDADES Es un dispositivo semiconductor cuya función principal es la de la amplificación. El transistor es fabricado con materiales semiconductores como el Germanio y el Silicio. Se dividen en: Transistores bipolares. FET (Transistores de Efecto de Campo) Los transistores bipolares son los más utilizados. Estos se clasifican en: Transistor NPN. Transistor PNP. El transistor bipolar posee tres terminales con los siguientes nombres: Base (B), colector (C) y emisor (E) Arquitectura de Sistemas Digitales 79 Transistor NPN Transistor PNP Autoría propia 3.5 TEMA 5 EL CIRCUITO INTEGRADO 3.5.1 GENERALIDADES Un circuito integrado (CI) o chip, es un encapsulado que contiene resistencias, condensadores, diodos y transistores (del orden de miles o millones). Su área es de tamaño reducido, del orden de un cm² o inferior. Un circuito integrado es un circuito que no se puede modificar físicamente. 3.5.2 TEMPORIZADOR IC-555 Es un circuito integrado (C.I.) muy utilizado en la implementación de circuitos electrónicos. Arquitectura de Sistemas Digitales 80 Tomado de: https://commons.m.wikimedia.org/wiki/Category:555_timer_IC Se utiliza como: Multivibrador astable. Multivibrador monoestable. Generador de señal de reloj. 3.5.2.1 CIRCUITOS CON EL TEMPORIZADOR IC-555 Ejemplos de aplicación con el IC-555 a) Semáforo En éste circuito el CI 555 se utiliza como reloj. Así cuando la señal de salida (Terminal 3) del CI 555 es negativa el led superior se enciende ya que queda polarizado directamente y el led inferior permanece apagado ya que queda polarizado inversamente. Arquitectura de Sistemas Digitales 81 Autoría propia Luego cuando la señal de salida (Terminal 3) del CI 555 es positiva el led inferior se enciende ya que queda polarizado directamente y el led superior permanece apagado ya que queda polarizado inversamente. Autoría propia Arquitectura de Sistemas Digitales 82 Este proceso se repite alternando el encendido de los leds. b) Generador de audio En éste circuito el CI 555 se utiliza como reloj. Así el potenciómetro (Resistor variable) controla la frecuencia de la señal de salida (Audio) generada por el CI 555 en el terminal 3. Ésta señal es amplificada por el transistor NPN para ser reproducida por el parlante. Autoría propia 3.5.3 EJERCICIOS DE ENTRENAMIENTO Pautas para desarrollar los siguientes ejercicios: De acuerdo a los conceptos estudiados y a investigación previa desarrollar los siguientes ítems: 1) Investigar la conexión entre capacitores. 2) Investigar la conexión entre bobinas. 3) ¿Qué es inducción electromagnética? 4) Consultar sobre el diodo LED. 5) ¿Cómo amplifica un transistor? 6) Explicar el funcionamiento del C.I 555 como: a) Monoestable. Arquitectura de Sistemas Digitales 83 b) Estable. Laboratorio Utilizando el protoboard montar los siguientes circuitos. Explicar el funcionamiento: a) b) Arquitectura de Sistemas Digitales 84 4 UNIDAD 4 CIRCUITOS LÓGICOS Y COMPONENTES DIGITALES Video: Curso de Electrónica Digital: Compuertas Lógicas ”Ver Video”: https://www.youtube.com/watch?v=8uZ4KU7pAus 4.1.1 RELACIÓN DE CONCEPTOS Arquitectura de Sistemas Digitales 85 Álgebra booleana: Son las Matemáticas de los Sistemas digitales. Utiliza variables lógicas (Toman valores de 0 ó 1) y operadores lógicos (Yes, Not, And, Or, Nand, Nor, Exor, Nexor). Circuito lógico (o digital): Es aquel que maneja la información utilizando el sistema binario (0 y 1). Codificador: Es un circuito combinacional. Se obtiene en la salida el código binario correspondiente a la entrada que se activa. (Colocada en uno). Componentes digitales: Son aquellos dispositivos que forman parte de un circuito electrónico digital. Compuertas digitales: Son funciones básicas de los sistemas electrónicos digitales; trabajan con números binarios. Compuerta digital AND: Es aquella que realiza la operación denominada multiplicación lógica. Compuerta digital EXOR: Es aquella que realiza la operación de comparación (Dos entradas). Se obtiene un nivel alto en la salida cuando las entradas son diferentes. Compuerta digital NAND: Es aquella que realiza la operación inversa de la compuerta AND. Se puede utilizar como compuerta universal ya que se pueden combinar varias de éstas compuertas para implementar el resto de las compuertas lógicas básicas (Por ejemplo: NOT, AND, OR, EXOR, etc.) Compuerta digital NEXOR: Es aquella que realiza la operación de comparación (Dos entradas). Se obtiene un nivel alto en la salida cuando las entradas son iguales. Compuerta digital NOR: Es aquella que realiza la operación inversa de la compuerta OR. Compuerta digital NOT: Es aquella que invierte el valor de la entrada (Operación de negación o complemento) Compuerta digital OR: Es aquella que realiza la operación denominada suma lógica. Compuerta digital YES: Es aquella que amplifica la señal. Se obtiene en la salida el mismo bit de entrada. Decodificador: Es un circuito combinacional. Dado el código binario en la entrada se activa (Coloca en uno) la salida correspondiente a dicho código. Arquitectura de Sistemas Digitales 86 Demultiplexor: Es un circuito combinacional que permite seleccionar a cuáles de las salidas (mediante selectores) pasará la entrada. Flip Flop: Es un circuito secuencial que está conformado por compuertas lógicas. Se conoce como un dispositivo de memoria. Mapas de Karnaugh: Método sistemático de simplificación de expresiones lógicas. Método: Modo ordenado y sistemático de proceder para llegar a un resultado o fin determinado. Multiplexor: Es un circuito combinacional que permite seleccionar de las entradas (mediante selectores) cuál de ellas pasará a la salida. Propiedades: Son reglas que se obtienen a partir de los axiomas y deben ser demostradas mediante estos. Propiedad asociativa: Enuncia que el resultado en la salida es el mismo, independiente de la forma en que se agrupen las variables de entrada. Propiedad conmutativa: Enuncia que, al cambiar el orden de las variables de entrada, permanece invariable el resultado que se obtiene en la salida. Propiedad distributiva: Enuncia la relación entre la multiplicación lógica y la suma lógica. Registro: Es un dispositivo electrónico semiconductor creado a partir de implementaciones con flip flops los cuales permiten el manejo de datos usando circuitos combinatorios y secuenciales específicos. Reglas: Son los métodos para llevar a cabo una operación (En este caso, operación lógica. 4.2 TEMA 1 COMPUERTAS DIGITALES Las compuertas digitales son funciones básicas de los sistemas electrónicos digitales. Estos componentes trabajan con números binarios. Las compuertas digitales básicas son: Arquitectura de Sistemas Digitales 87 Compuerta YES (Si) Número de entradas Funcionamiento Símbolo La salida es igual a la entrada. Tabla de estados ENTRADA SALIDA A Z Expresión lógica 𝒁= 𝑨 Una Autoría propia 0 1 0 1 Compuerta NOT (Inversora, negación) Número de entradas Una Funcionamiento Símbolo Tabla de estados ENTRADA SALIDA A Z La salida es la negación de la entrada. Autoría propia 0 1 Expresión lógica ̅ 𝒁= 𝑨 1 0 Compuerta AND (Y, Producto lógico) Número de entradas Funcionamiento Símbolo Tabla de estados Expresión lógica Arquitectura de Sistemas Digitales Para dos entradas se tiene: 88 Mínimo dos La salida es 1 cuando todas las entradas sean 1. ENTRADAS SALIDA A B Z Autoría propia 0 0 1 1 0 1 0 1 𝒁 = 𝑨𝑩 0 0 0 1 Compuerta NAND (Negación de la AND) Número de entradas Funcionamiento Símbolo Tabla de estados Expresión lógica Para dos entradas se tiene: Mínimo dos La salida es 1 cuando al menos una de las entradas sea 0. ENTRADAS SALIDA A B Z Autoría propia 0 0 1 1 0 1 0 1 𝒁 = ̅̅̅̅ 𝑨𝑩 1 1 1 0 Compuerta OR (O, Suma lógica) Número de entradas Funcionamiento Símbolo Tabla de estados Para dos entradas se tiene: La salida es 1 cuando al menos ENTRADAS SALIDA A B Z Expresión lógica Arquitectura de Sistemas Digitales 89 Mínimo dos 𝒁=𝑨+𝑩 una de las entradas sea 1. Autoría propia 0 0 1 1 0 1 0 1 0 1 1 1 Compuerta NOR (Negación de la OR) Número de entradas Mínimo dos Funcionamiento Símbolo Para dos entradas se La salida es 1 tiene: cuando todas las entradas sean 0. Autoría propia Tabla de estados ENTRADAS SALIDA A B Z 0 0 1 1 0 1 0 1 Expresión lógica 𝒁 = ̅̅̅̅̅̅̅̅ 𝑨+𝑩 1 0 0 0 Compuerta EXOR (Or Exclusiva) Número de entradas Solo dos Funcionamiento Símbolo La salida es 1 cuando las entradas sean diferentes. Tabla de estados ENTRADAS SALIDA A B Z Autoría propia 0 0 0 1 0 1 Expresión lógica 𝒁=𝑨⊕ 𝑩 Arquitectura de Sistemas Digitales 1 1 90 0 1 1 0 Compuerta NEXOR (Negación de la Or Exclusiva) Número de entradas Solo dos Funcionamiento Símbolo La salida es 1 cuando las entradas sean iguales. Tabla de estados ENTRADAS SALIDA A B Z Autoría propia 0 0 1 1 0 1 0 1 Expresión lógica 𝒁 = ̅̅̅̅̅̅̅̅̅ 𝑨⊕ 𝑩 1 0 0 1 Señal digital Se compone de un tren de impulsos. Puede ser: Periódica. También se llama onda cuadrada. Ésta señal se repite a intervalos de tiempo fijo (Período). Arquitectura de Sistemas Digitales 91 Autoría propia La duración del bit se representa como tn No periódica. La señal no se repite a intervalos de tiempos fijos. Además, el ancho de los impulsos es distinto. Por ejemplo: Autoría propia Se pueden diseñar y construir muchos tipos de circuitos con el solo hecho de combinar las compuertas lógicas básicas, entre ellos se tiene: Amplificación de la señal digital con compuerta YES. Oscilador con compuertas NOT y capacitor. Alarma con compuertas NAND. Circuito que genera el complemento a 1 utilizando compuertas NOT. Compuerta AND como un dispositivo de activación / inhibición. Circuito detector de intrusos con compuerta OR. Arquitectura de Sistemas Digitales 92 4.2.1 EJERCICIOS DE APRENDIZAJE Dadas las señales de entrada Autoría propia Hallar la señal y la expresión lógica de salida para: a) Autoría propia Solución. Arquitectura de Sistemas Digitales 93 Se utilizan variables auxiliares (X y Y) para obtener las salidas de las compuertas Nand y Or. Autoría propia Para obtener las salidas de las compuertas Nand y Or se trabajará con los códigos binarios correspondientes a las señales de entrada (A, B y C). De esta forma se tiene: Para la señal de entrada A Autoría propia Su código binario es 1100010 Para la señal de entrada B Arquitectura de Sistemas Digitales 94 Autoría propia Su código binario es 1001110 Para la señal de entrada C Autoría propia Su código binario es 0011101 Para hallar la salida de la compuerta Nand se tiene en cuenta que la salida es 1 cuando al menos una de las entradas sea 0. A 1100010 B 1001110 C 0011101 X 1111111 (Salida de la compuerta Nand) De igual forma se procede a determinar la salida de la compuerta Or Para hallar la salida de la compuerta Or se tiene en cuenta que la salida es 1 cuando al menos una de las entradas sea 1. B 1001110 Arquitectura de Sistemas Digitales 95 C 0011101 Y 1011111 (Salida de la compuerta Or) Para determinar Z1 (Salida de la compuerta Exor) se utilizan las respuestas obtenidas para X y Y. Para hallar la salida de la compuerta Exor se tiene en cuenta que la salida es 1 cuando las entradas sean diferentes. X 1111111 (Salida de la compuerta Nand) Y 1011111 (Salida de la compuerta Or) Z1 0100000 (Salida de la compuerta Exor) Así la señal de salida es Autoría propia Para determinar la expresión lógica se procede: Arquitectura de Sistemas Digitales 96 Autoría propia Z1 (Salida de la compuerta Exor) se escribe como: 𝒁𝟏 = 𝑿 ⊕ 𝒀 Se deben encontrar las expresiones lógicas para X y Y X (Salida de la compuerta Nand) se escribe como: ̅̅̅̅̅̅ 𝑿 = 𝑨𝑩𝑪 Y (Salida de la compuerta Or) se escribe como: 𝒀= 𝑩+𝑪 Reemplazando en Z1 𝒁𝟏 = 𝑿 ⊕ 𝒀 las expresiones lógicas de X y Y se obtiene: 𝑍1 = ̅̅̅̅̅̅ 𝐴𝐵𝐶 ⊕ (𝐵 + 𝐶) Arquitectura de Sistemas Digitales 97 b) Autoría propia Solución. Se utilizan variables auxiliares (X, Y y W) para obtener las salidas de las compuertas Not, Nor y And. Autoría propia Para obtener las salidas de las compuertas Not, Nor y And se trabajará con los códigos binarios correspondientes a las señales de entrada (A, B y C). Arquitectura de Sistemas Digitales 98 De esta forma se tiene: Para la señal de entrada A Autoría propia Su código binario es 1100010 Para la señal de entrada B Autoría propia Su código binario es 1001110 Para la señal de entrada C Autoría propia Su código binario es 0011101 Arquitectura de Sistemas Digitales 99 Para hallar la salida de la compuerta Not se tiene en cuenta que la salida es la negación de la entrada. A 1100010 X 0011101 (Salida de la compuerta Not) De igual forma se procede a determinar la salida de la compuerta And. Para hallar la salida de la compuerta And se tiene en cuenta que la salida es 1 cuando todas las entradas sean 1. A 1100010 B 1001110 C 0011101 W 0000000 (Salida de la compuerta And) De igual forma se procede a determinar la salida de la compuerta Nor. Para hallar la salida de la compuerta Nor se tiene en cuenta que la salida es 1 cuando todas las entradas sean 0. X 0011101 C 0011101 Y 1100010 (Salida de la compuerta Nor) Para determinar Z2 (Salida de la compuerta Or) se utilizan las respuestas obtenidas para Y y W. Para hallar la salida de la compuerta Or se tiene en cuenta que la salida es 1 cuando al menos una de las entradas sea 1. Y 1100010 (Salida de la compuerta Nor) W 0000000 (Salida de la compuerta And) Z2 1100010 (Salida de la compuerta Or) Así la señal de salida es Arquitectura de Sistemas Digitales 100 Autoría propia Para determinar la expresión lógica se procede: Autoría propia Z2 (Salida de la compuerta Or) se escribe como: 𝒁𝟐 = 𝒀 + 𝑾 Se deben encontrar las expresiones lógicas para X, Y y W. X (Salida de la compuerta Not) se escribe como: ̅ 𝑿= 𝑨 Y (Salida de la compuerta Nor) se escribe como: Arquitectura de Sistemas Digitales 101 𝒀 = ̅̅̅̅̅̅̅̅ 𝑿+𝑪 W (Salida de la compuerta And) se escribe como: 𝑾 = 𝑨𝑩𝑪 Reemplazando en Y 𝒀 = ̅̅̅̅̅̅̅̅ 𝑿+𝑪 la expresión lógica de X se obtiene: ̅+𝑪 𝒀 = ̅̅̅̅̅̅̅̅ 𝑨 Reemplazando en Z2 𝒁𝟐 = 𝒀 + 𝑾 las expresiones lógicas de Y y W se obtiene: ̅ + 𝑪 + 𝑨𝑩𝑪 𝒁𝟐 = ̅̅̅̅̅̅̅̅ 𝑨 4.3 TEMA 2 ÁLGEBRA BOOLEANA Son las Matemáticas de los Sistemas digitales. Al igual que en otras áreas de las Matemáticas, existen en el Algebra de Boole una serie de leyes y reglas. Propiedades de las Operaciones Booleanas. Las operaciones booleanas están se enfocan en tres propiedades: Conmutativa. Asociativa. Distributiva. Propiedad conmutativa de la suma. Arquitectura de Sistemas Digitales 102 𝑨+𝑩=𝑩+𝑨 El orden de las entradas en una compuerta OR no modifica la salida. Autoría propia Propiedad conmutativa del producto. 𝑨. 𝑩 = 𝑩. 𝑨 El orden de las entradas en una compuerta AND no modifica la salida. Autoría propia Propiedad asociativa de la suma. 𝑨 + ( 𝑩 + 𝑪) = (𝑨 + 𝑩) + 𝑪 Autoría propia Propiedad asociativa del producto. Arquitectura de Sistemas Digitales 103 𝑨( 𝑩. 𝑪) = (𝑨. 𝑩) + 𝑪 Autoría propia Propiedad distributiva. Se distribuye la(s) variable(s) que multiplica(n) a los elementos que hay dentro del paréntesis. 𝑨 ( 𝑩 + 𝑪) = 𝑨𝑩 + 𝑨𝑪 Autoría propia 4.4 TEMA 3 SIMPLIFICACIÓN DE EXPRESIONES ALGEBRAICAS POR MEDIO DE TEOREMAS Y DE MAPAS DE KARNAUGH Teoremas Booleanos. Los teoremas booleanos son reglas que permiten simplificar funciones lógicas complejas. Algunos son: 𝐀+𝟎=𝐀 𝐀+𝟏=𝟏 Arquitectura de Sistemas Digitales 𝐀+𝐀=𝐀 104 ̅=𝟏 𝐀+𝐀 𝐀 .𝟎 = 𝟎 𝐀 .𝟏 = 𝐀 𝐀 .𝐀 = 𝐀 ̅=𝟎 𝐀. 𝐀 ̅=𝑨 𝐀 𝐀 + 𝐀𝐁 = 𝐀 ̅𝐁=𝐀+𝐁 𝐀+𝐀 (𝐀 + 𝐁)(𝐀 + 𝐂) = 𝐀 + 𝐁𝐂 4.4.1 EJERCICIOS DE APRENDIZAJE Simplificar utilizando el Álgebra de Boole las siguientes expresiones lógicas: ̅ + AB) a) 𝑍 = A(A Solución. ̅ + 𝐀𝐁) Sea 𝒁 = 𝐀(𝐀 Paso 1 De acuerdo a la propiedad distributiva 𝑨 ( 𝑩 + 𝑪) = 𝑨𝑩 + 𝑨𝑪 Se aplica en la expresión inicial ̅ + AB) 𝑍 = A(A Arquitectura de Sistemas Digitales 105 ̅ + A. A. B 𝑍 = A. A Paso 2 De acuerdo a los siguientes teoremas: 𝐀 .𝐀 = 𝐀 ̅=𝟎 𝐀. 𝐀 Se aplican en la expresión obtenida en el paso 1 𝑍 = 𝐴. 𝐴̅ + 𝐴. 𝐴. 𝐵 𝑍 = 0 + 𝐴. 𝐵 Paso 3 De acuerdo al siguiente teorema: 𝐀+𝟎=𝐀 Se aplica en la expresión obtenida en el paso 2 para obtener la expresión simplificada 𝑍 = 0 + 𝐴. 𝐵 𝑍 = 𝐴𝐵 ̅ )(A. B + A. B. C̅ ) b) 𝑍 = (A + A Solución. ̅ )(𝐀. 𝐁 + 𝐀. 𝐁. 𝐂̅ ) Sea 𝒁 = (𝐀 + 𝐀 Paso 1 De acuerdo al siguiente teorema: ̅=𝟏 𝐀+𝐀 Se aplica en la expresión inicial Arquitectura de Sistemas Digitales 106 ̅ )(A. B + A. B. C̅ ) 𝑍 = (A + A 𝑍 = 1(A. B + A. B. C̅ ) Paso 2 De acuerdo al siguiente teorema: 𝐀 .𝟏 = 𝐀 Se aplica en la expresión obtenida en el paso 1 𝑍 = 1(A. B + A. B. C̅ ) 𝑍 = A. B + A. B. C̅ Paso 3 De acuerdo al siguiente teorema: 𝐀 + 𝐀𝐁 = 𝐀 Se aplica en la expresión obtenida en el paso 2 para obtener la expresión simplificada 𝑍 = A. B + A. B. C̅ 𝑍 = A. B Teoremas de DeMorgan. Son dos teoremas propuestos por el matemático Augustus De Morgan. a) El complemento de un producto de variables es igual a la suma de los complementos de las variables. ̅̅̅̅ = 𝑨 ̅+ 𝑩 ̅ 𝑨𝑩 b) El complemento de una suma de variables es igual al producto de los complementos de las variables. ̅̅̅̅̅̅̅̅ ̅𝑩 ̅ 𝑨+𝑩=𝑨 Arquitectura de Sistemas Digitales 107 Al aplicar los teoremas de DeMorgan se tiene en cuenta el número de negaciones tanto para las variables como para los conectivos lógicos así: Si el número de negaciones es par La variable no cambia. El conectivo lógico no cambia. Si el número de negaciones es impar La variable se escribe negada. El conectivo lógico Y (And) cambia por el conectivo lógico O (Or) y el conectivo lógico O (Or) cambia por el conectivo lógico Y (And). 4.4.2 EJERCICIOS DE APRENDIZAJE. Aplicar los teoremas de DeMorgan a las siguientes expresiones: ̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅ a) 𝑍 = (𝐴 + 𝐵 + 𝐶)𝐷 Solución. ̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅ Sea 𝒁 = (𝑨 + 𝑩 + 𝑪)𝑫 Se observa que la expresión completa se complementa una vez. Con ello se tiene en cuenta: Si el número de negaciones es impar: La variable se escribe negada El conectivo lógico Y (And) cambia por el conectivo lógico O (Or) y el conectivo lógico O (Or) cambia por el conectivo lógico Y (And). Se aplica lo antes descrito en la expresión original y se obtiene: ̅ 𝑍 = 𝐴̅ 𝐵̅ 𝐶̅ + 𝐷 ̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅ ̅̅̅̅ b) 𝑍 = 𝐴𝐵 + 𝐶𝐷 + 𝐸̅ ( 𝐹 + 𝐺̅ ) Solución. Arquitectura de Sistemas Digitales 108 ̅) ̅̅̅̅ + 𝑪𝑫 + 𝑬 ̅( 𝑭+ 𝑮 Sea 𝒁 = ̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅ 𝑨𝑩 Se observa que en la expresión hay elementos que se complementan una y dos veces. Con ello se tiene en cuenta: Si el número de negaciones es par: La variable no cambia. El conectivo lógico no cambia. Si el número de negaciones es impar: La variable se escribe negada. El conectivo lógico Y (And) cambia por el conectivo lógico O (Or) y el conectivo lógico O (Or) cambia por el conectivo lógico Y (And). Se aplica lo antes descrito en la expresión original y se obtiene: ̅ )( 𝐸 + 𝐹̅ 𝐺 ) 𝑍 = 𝐴𝐵( 𝐶̅ + 𝐷 Mapas de Karnaugh Un mapa de Karnaugh es la representación gráfica de una función lógica a partir de la tabla de verdad. El número de casillas del mapa es igual al número de combinaciones que se pueden obtener con las variables de entrada. Los mapas se pueden utilizar para 2, 3, 4 y 5 variables. Si se aplica adecuadamente genera expresiones simples. 4.4.3 EJERCICIO DE APRENDIZAJE. Dada la siguiente tabla de estados; hallar: a) Expresión lógica. b) Simplificar la expresión lógica utilizando un Mapa de Karnaugh. ENTRADAS SALIDA Arquitectura de Sistemas Digitales 109 A B C Z 0 0 0 0 1 1 1 1 0 0 1 1 0 0 1 1 0 1 0 1 0 1 0 1 1 1 0 0 1 1 1 1 Solución. a) Para pasar de la tabla de estados a la función lógica primero se ubican las combinaciones en las cuales la salida es 1. Luego se procede a decodificar cada una de las combinaciones así: Si la variable en la tabla de verdad es 1 se escribe la variable. Si la variable en la tabla de verdad es 0 se escribe la variable negada. Al final todos los términos se unen por medio de Or (Suma lógica). Teniendo en cuenta lo anterior, las combinaciones en las cuales la salida es 1 son: ENTRADAS SALIDA A B C Z 0 0 1 1 1 1 0 0 0 0 1 1 0 1 0 1 0 1 1 1 1 1 1 1 Decodificando se obtiene la siguiente expresión lógica: ̅B ̅B ̅ + AB ̅ + ABC ̅C̅ + A ̅C + AB ̅C ̅C + ABC Z= A Arquitectura de Sistemas Digitales 110 b) Ahora pasamos a implementar el mapa de Karnaugh correspondiente a tres variables. El mapa tiene 2n casillas; es decir 23 = 8. Autoría propia En el mapa de Karnaugh se coloca 1 en las casillas que corresponden a las combinaciones en las cuales la función es 1 en la tabla de estados. Luego se procede a generar grupos de "1"s. Cada agrupación debe contener 1, 2, 4, 8 ó 16 unos. Dos celdas son adyacentes Los unos que se agrupan deben ser adyacentes (no en diagonal). La fila superior y la fila inferior son adyacentes. Las columnas de los extremos son adyacentes. Entre más unos se agrupen más se simplifica la función original. En el ejemplo se ve la posibilidad de generar dos agrupaciones. Se puede compartir unos en más de una agrupación ya que son agrupaciones diferentes (No hay unos redundantes). Arquitectura de Sistemas Digitales 111 Autoría propia La expresión simplificada se determina de la siguiente forma: De cada agrupación sale un término el cual está conformado por las variables que no cambian para todos los unos de la agrupación. Las variables que cambian se desechan. La(s) variable(s) que no cambian se escriben como son (0 negada y 1 variable). Finalmente se unen los términos por medio de Or (Suma lógica). Para el ejemplo se obtiene: ̅+A Z= B 4.5 TEMA 4 FLIP - FLOPS Un flip flop es un circuito secuencial que está conformado por compuertas lógicas. Es un dispositivo de memoria. Son elementos biestables síncronos, ya que la salida varía de estado únicamente cuando la señal de control llamada reloj (Clock, CLK) lo indica. Arquitectura de Sistemas Digitales 112 Autoría propia Flanco. En la señal de reloj se denomina flanco a la transición del nivel bajo al alto (flanco de subida -transición de 0 a 1) o del nivel alto al bajo (flanco de bajada --transición de 1 a 0). En esos instantes es que los flip flops trabajan. Flanco de subida: Autoría propia Flanco de bajada: Autoría propia Existen cuatro tipos de flip flops: Flip flop SR. Flip flop JK. Flip flop D. Flip flop T. Arquitectura de Sistemas Digitales 113 Flip flop SR. El flip flop SR es la unidad de memoria más simple, y en base a él, se diseñan flip flops más ̅ avanzados. El circuito tiene dos entradas, Set (S) y Reset (R), y dos salidas, llamadas Q y Q La siguiente tabla muestra el funcionamiento de un flip flop SR activo en flanco de subida. (Para flanco de bajada el comportamiento es similar) ENTRADAS CLK SALIDA S R Q 0 0 1 1 0 1 0 1 Permanece 0 1 Prohibido Flip flop JK. El flip flop JK es la mejora del Flip flop SR. La diferencia se da cuando las señales de entrada J=1 y K=1 (Prohibido, en el caso del flip flop SR) pues la salida es la negación. La siguiente tabla muestra el funcionamiento de un flip flop JK activo en flanco de subida. (Para flanco de bajada el comportamiento es similar) ENTRADAS CLK SALIDA J K Q 0 0 1 1 0 1 0 1 Permanece 0 1 Invierte Flip flop D. ̅. El flip flop D tiene una entrada, Data (D) y dos salidas, llamadas Q y Q La siguiente tabla muestra el funcionamiento de un flip flop D activo en flanco de subida. (Para flanco de bajada el comportamiento es similar) ENTRADAS SALIDA Arquitectura de Sistemas Digitales CLK 114 D Q 0 1 0 1 Flip flop T. ̅. El flip flop T tiene una entrada, Toggle (T) y dos salidas, llamadas Q y Q La siguiente tabla muestra el funcionamiento de un flip flop T activo en flanco de subida. (Para flanco de bajada el comportamiento es similar) ENTRADAS CLK SALIDA T Q 0 1 Permanece Invierte 4.5.1 EJERCICIOS DE APRENDIZAJE. 1) Dadas las señales de entrada determine la señal de salida (Flip flop activo en flanco de bajada) Autoría propia Solución. Se señalan los flancos en los cuales trabaja el flip flop. La señal de salida se inicia en 0 o en 1 Arquitectura de Sistemas Digitales 115 Para éste ejercicio se inicia en 0 Se utiliza la tabla de funcionamiento del flip flop SR ENTRADAS CLK SALIDA S R Q 0 0 1 1 0 1 0 1 Permanece 0 1 Prohibido La señal de salida que se obtiene es: Autoría propia 2) Dada la señal de entrada determine la señal de salida (Flip flop activo en flanco de subida) Autoría propia Arquitectura de Sistemas Digitales 116 Solución. Se señalan los flancos en los cuales trabaja el flip flop. La señal de salida se inicia en 0 o en 1 Para éste ejercicio se inicia en 1 Se utiliza la tabla de funcionamiento del flip flop T ENTRADAS CLK SALIDA T Q 0 1 Permanece Invierte La señal de salida que se obtiene es: Autoría propia 4.6 TEMA 5 CIRCUITOS INTEGRADOS DIGITALES Los circuitos integrados (chips) son dispositivos semiconductores electrónicos que contiene diferentes elementos electrónicos como: Resistores, diodos, transistores entre otros. Arquitectura de Sistemas Digitales 117 El crédito al diseño del primer circuito integrado se debe al ingeniero Yack Kilby (1958) por haber logrado integrar seis transistores en un mismo circuito integrado, con el propósito de hacer un oscilador de rotación de fase. Los circuitos integrados facilitaron la miniaturización de los aparatos electrónicos debido a su incremento en el desarrollo e invención de nuevas tecnologías como: Computadores, celulares, informática, comunicaciones, manufactura, transporte, internet, entre otros. Según la naturaleza de la señal los circuitos integrados se clasifican en dos grupos: Circuitos integrados analógicos. Pueden ser simples transistores encapsulados juntos, sin unión, hasta dispositivos completos como amplificadores, osciladores reguladores o receptores de radio completos. Circuitos integrados digitales. Pueden ser puertas básicas lógicas (Y, O, NO) hasta los más complejos como microprocesadores o micro controladores. Circuitos integrados digitales Los circuitos integrados digitales se clasifican de acuerdo a: Familia Lógica. Complejidad (Integración). Arquitectura de Sistemas Digitales 118 Familia Lógica. TTL (Lógica transistor transistor). Es la más utilizada. ECL (Lógica de emisor acoplado). Se utiliza en sistemas de alta velocidad. MOS (Semiconductor Metal Oxido). Maneja gran densidad de componentes. CMOS (Semiconductor Metal Oxido Complementario). Se utiliza en sistemas que requieren bajo consumo de potencia. Complejidad (Integración). SSI (Small Scale Integration) nivel pequeño: desde 10 a 100 transistores. MSI (Medium Scale Integration) nivel medio: De 101 a 1000 transistores. LSI (Large Scale Integration) nivel grande: De 1001 a 10000 transistores. VLSI (Very Large Scale Integration) nivel muy grande: De 10001 a 100000 transistores. ULSI (Ultra Large Scale Integration) nivel ultra grande: De 100001 a 1000000 transistores. GLSI (Giga Large Scale Integration) nivel giga grande: Mucho más de un millón de transistores. La fabricación de los circuitos integrados es compleja por tener una alta integración de componentes en un espacio muy reducido, de manera que llegan a ser microscópicos. Permiten grandes simplificaciones con relación a los antiguos circuitos, y el montaje se realiza de forma más rápida. Los circuitos integrados digitales son dispositivos de dos estados, un estado está cercano a 0 v o tierra (bajo = 0) y el otro está cercano al voltaje de alimentación del circuito integrado (alto = 1). Además, son capaces de procesar dígitos binarios. Lógica TTL (Lógica Transistor Transistor): Utiliza transistores para su funcionamiento y una alimentación de tensión de 5 voltios DC. Arquitectura de Sistemas Digitales 119 Series: 74LSXX 74SXX 74HCXX Según su número de serie se diferencian como compuertas. Por ejemplo: COMPUERTAS Nand (Dos entradas) Not And (Dos entradas) Or (Dos entradas) Exor 7400 7404 7408 7432 7486 Circuito combinacional. Es aquel que está formado por compuertas lógicas elementales (AND, OR, NAND, NOR, entre otros), que tiene un determinado número de entradas y salidas, dependiendo los valores que toman las salidas exclusivamente de los que toman las entradas en ese instante. Ejemplo de este tipo de circuitos son: los codificadores, decodificadores, multiplexores, demultiplexores, entre otros. Circuito secuencial. Los circuitos combinacionales tienen muchas limitantes debido a que no son capaces de reconocer el orden en que se van presentando las combinaciones de entradas con respecto al tiempo, es decir, no pueden reconocer una secuencia de combinaciones, ya que no poseen una manera de almacenar información pasada, es decir no poseen memoria. Arquitectura de Sistemas Digitales 120 Un circuito cuya salida depende no solo de la combinación de entrada, sino también de la historia de las entradas anteriores se denomina Circuito Secuencial. Ejemplo de este tipo de circuitos son: Flip Flops, contadores, etc. 4.7 TEMA 6 CODIFICADOR Un codificador (es un circuito combinacional, cuyo funcionamiento es el siguiente: Se obtiene en la salida el código binario correspondiente a la entrada que se activa (Colocada en uno). Posee 2n entradas y n salidas. Existen dos tipos de codificadores: codificadores sin prioridad y codificadores con prioridad. Los codificadores con prioridad generan el código binario de la entrada activa más alta (Valor decimal) Un ejemplo de aplicación se da en el teclado del computador que posee un circuito codificador. 4.7.1 EJERCICIO DE APRENDIZAJE. Representar un codificador que cumpla con las siguientes características: n=3 Entrada A5=1 y el resto en 0 Solución. Dado que n=3; esto indica el número de salidas. Con el dato del número de salidas se procede a determinar el número de entradas utilizando 2n Reemplazando n se tiene 2n 23 = 8 El codificador posee 8 entradas. Como se da el valor de las entradas y se referencian con A; las entradas se numeran desde A0 hasta A7 Arquitectura de Sistemas Digitales 121 Como no se da la referencia de las salidas se representan utilizando cualquier variable. Para este caso se utilizará la Y. Las salidas se numeran desde Y0 hasta Y2 Dado que: Entrada A5=1 y el resto en 0 Esto indica que en la salida se obtiene el código binario correspondiente a la entrada que se activa (Colocada en uno). Con ello se obtiene en la salida el código binario del número 5 (101) Y0 = 1 Y1 = 0 Y2 = 1 NOTA: Tener en cuenta que Y0 es el bit menos significativo y que Y2 es el bit más significativo. Así el codificador requerido es: Autoría propia Arquitectura de Sistemas Digitales 122 4.8 TEMA 7 DECODIFICADOR Un decodificador es un circuito combinacional, cuyo funcionamiento es el siguiente: Dado el código binario en la entrada, se activa (Coloca en uno) la salida correspondiente a dicho código. Posee n entradas y 2n salidas. Un ejemplo de aplicación se da con el manejo de los diferentes periféricos del computador. 4.8.1 EJERCICIOS DE APRENDIZAJE a) Elaborar la tabla de estados para un decodificador de dos entradas. b) Implementar el decodificador con compuertas lógicas propuesto en el numeral anterior. Solución. a) Dado que n=2; esto indica el número de entradas. Con el dato del número de entradas se procede a determinar el número de salidas utilizando 2n Reemplazando n se tiene 2n 22 = 4 El decodificador posee 4 salidas. Como no se da la referencia de las entradas ni salidas se representan utilizando cualquier variable. Para este caso se utilizará la A para representar las entradas y la D para representar las salidas. Las entradas se numeran como A0 y A1 Las salidas se numeran desde D0 hasta D3 NOTA: Tener en cuenta que A0 es el bit menos significativo y que A1 es el bit más significativo. Tener en cuenta que D0 es el bit menos significativo y que D3 es el bit más significativo. Arquitectura de Sistemas Digitales 123 Con ello la tabla que muestra el funcionamiento del decodificador es: ENTRADAS SALIDAS A1 A0 D3 D2 D1 D0 0 0 1 1 0 1 0 1 0 0 0 1 0 0 1 0 0 1 0 0 1 0 0 0 En la tabla se observa que dependiendo del código de entrada se activa (Coloca en 1) la salida correspondiente a dicho código. b) Para implementar el circuito con compuertas lógicas se tiene en cuenta la tabla de estados elaborada en el numeral a. Se procede a determinar la relación de cada una de las salidas con las entradas. Para ello si la variable en la tabla de verdad es 1 se coloca normal pero si es 0 se coloca la variable negada. Para D3 ENTRADAS SALIDA A1 A0 D3 0 0 1 1 0 1 0 1 0 0 0 1 Se observa que D3 es 1 cuando A0 y A1 son 1 Así 𝑫𝟑 = 𝑨𝟏 𝑨𝟎 Para D2 ENTRADAS SALIDA Arquitectura de Sistemas Digitales 124 A1 A0 D2 0 0 1 1 0 1 0 1 0 0 1 0 Se observa que D2 es 1 cuando A0 = 0 y A1 = 1 Así 𝑫𝟐 = 𝑨𝟏 ̅̅ 𝑨̅̅𝟎 Para D1 ENTRADAS SALIDA A1 A0 D1 0 0 1 1 0 1 0 1 0 1 0 0 Se observa que D1 es 1 cuando A0 = 1 y A1 = 0 Así 𝑫𝟏 = ̅̅ 𝑨̅̅𝟏 𝑨𝟎 Para D0 ENTRADAS SALIDA A1 A0 D0 0 0 1 1 0 1 0 1 1 0 0 0 Se observa que D0 es 1 cuando A0 y A1 son 0 Así Arquitectura de Sistemas Digitales 125 𝑫𝟎 = ̅̅ 𝑨̅̅𝟏 ̅𝑨̅̅̅𝟎 El decodificador con compuertas lógicas es: Autoría propia 4.9 TEMA 8 MULTIPLEXOR El multiplexor (MUX) es un circuito combinacional que permite seleccionar de las entradas (mediante selectores) cuál de ellas pasará a la salida. Al multiplexor también se le llama selector de datos. Posee 2n entradas y una salida. La cantidad de selectores está dada por n. Número de entradas = 2n. 4.9.1 EJERCICIO DE APRENDIZAJE Representar un multiplexor que cumpla con las siguientes características: n=2 Entradas A2 y A0 en 1 y el resto en 0 Arquitectura de Sistemas Digitales 126 Selectores S1=1 S0=1 Solución. Dado que n=2; esto indica el número de selectores. Con el dato del número de selectores se procede a determinar el número de entradas utilizando 2n Reemplazando n se tiene 2n 22 = 4 El multiplexor posee 4 entradas. Nota: Tener en cuenta que todo multiplexor posee una salida. Como se da el valor de las entradas y se referencian con A; las entradas se numeran desde A0 hasta A3 Como se dan los valores de los selectores y se referencian con S; los selectores se numeran como S0 y S1 Como no se da la referencia de la salida se representa utilizando cualquier variable. Para este caso se utilizará la Y. NOTA: Tener en cuenta que A0 es el bit menos significativo y que A3 es el bit más significativo. Tener en cuenta que S0 es el bit menos significativo y que S1 es el bit más significativo. Dado que: Entradas A2 y A0 en 1 y el resto en 0 Con ello se tiene: A0 = 1 A1 = 0 A2 = 1 A3 = 0 Arquitectura de Sistemas Digitales 127 Además, se indica los valores de los selectores: S0=1 S1=1 Esto indica que en la salida se obtiene el bit correspondiente a la entrada seleccionada por el código 11 El código 11 corresponde a la entrada A3 Como A3 = 0 en la salida Y se obtiene 0 Así el multiplexor requerido es: Autoría propia 4.10 TEMA 9 DEMULTIPLEXOR Un demultiplexor (DEMUX) es un circuito combinacional. Permite seleccionar a cuáles de las salidas (mediante selectores) pasará la entrada. Posee una entrada y 2n salidas. Al demultiplexor también se le llama distribuidor de datos. La cantidad de selectores está dada por n. Número de salidas = 2n. Arquitectura de Sistemas Digitales 128 4.10.1 EJERCICIO DE APRENDIZAJE Representar un de multiplexor que cumpla con las siguientes características: n=2 Entrada A en 1 Selectores S1=0 S0=1 Solución. Dado que n=2; esto indica el número de selectores. Con el dato del número de selectores se procede a determinar el número de salidas utilizando 2n Reemplazando n se tiene 2n 22 = 4 El de multiplexor posee 4 salidas. Nota: Tener en cuenta que todo demultiplexor posee una entrada. Se da el valor de la entrada y se referencia con A Como se dan los valores de los selectores y se referencian con S; los selectores se numeran como S0 y S1 Como no se da la referencia de las salidas se representan utilizando cualquier variable. Para este caso se utilizará la Y. Las salidas se numeran desde Y0 hasta Y3 Nota: Tener en cuenta que Y0 es el bit menos significativo y que Y3 es el bit más significativo. Tener en cuenta que S0 es el bit menos significativo y que S1 es el bit más significativo. Arquitectura de Sistemas Digitales 129 Dado que: Entrada A = 1 Además, se indica los valores de los selectores: S0=1 S1=0 Esto indica que el valor de la entrada pasará a la salida seleccionada por el código 01 El código 01 corresponde a la salida Y1 Como A = 1 en la salida Y1 se obtiene 1 Así el demultiplexor requerido es: Autoría propia 4.11 TEMA 10 REGISTRO Es un dispositivo electrónico semiconductor creado a partir de implementaciones con flip flops los cuales permiten el manejo de datos usando circuitos combinatorios y secuenciales específicos. El registro de n-bits tiene un grupo de n flip flops y almacena cualquier información binaria que contenga n bits. Los flip flops guardan la información binaria y las compuertas lógicas controlan cuando y como se transfiere información. Arquitectura de Sistemas Digitales 130 Los registros se representan por letras mayúsculas las cuales pueden estar acompañadas por números. La representación típica de un registro es el de un rectángulo con el nombre del en la parte superior. 4.11.1 EJERCICIOS DE ENTRENAMIENTO Pautas para desarrollar los siguientes ejercicios: De acuerdo a los conceptos estudiados y a investigación previa desarrollar los siguientes ítems: 1) Consultar los niveles lógicos de la familia TTL. 2) Consultar las referencias de circuitos integrados de las compuertas lógicas básicas. 3) Determinar aplicabilidad de las compuertas lógicas en diferentes sectores del medio. 4) Establecer ¿por qué es importante la simplificación de expresiones lógicas para la implementación de circuitos digitales? 5) Enunciar tres ejemplos de circuitos combinacionales y tres ejemplos de circuitos secuenciales. Dadas las señales de entrada Autoría propia Hallar la señal y la expresión lógica de salida para: Arquitectura de Sistemas Digitales 131 1) 2) Mediante las técnicas del Álgebra de Boole, simplificar: a) 𝑍 = ( 𝑊 + 𝑋𝑌 )(𝑋̅𝑌 + 𝑊 )( 𝑊 + 𝐹 ) ̅ ) + 𝐴̅ + 𝐵̅ ]𝐶𝐷 b) 𝑍 = [ 𝐴𝐵( 𝐶 + 𝐵̅ + 𝐷 ̅𝑄 ) c) 𝑍 = ( 𝑃̅ + 𝑃 ) + ( 𝑃𝑄 + 𝑃𝐻 Aplicar los teoremas de DeMorgan a: ̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅ ̅̅̅̅̅̅̅̅ a) 𝑍 = ̅̅̅̅̅̅̅̅̅̅ 𝐹 + 𝐸𝐶̅ + 𝐻(𝐺 + 𝐼 )̅ Arquitectura de Sistemas Digitales 132 ̅) b) 𝑍 = ̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅ 𝐴̅𝑁( 𝐵 + 𝐷 ̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅ ̅ )( 𝑁 + 𝑋̅) c) 𝑍 = ̿̿̿̿̿̿̿̿̿̿̿̿̿̿̿̿̿̿̿̿̿̿ ( 𝐴̅ + 𝐷 Mediante Mapas de Karnaugh simplificar. a) 𝑍 = 𝐴𝐵𝐶̅ + 𝐴𝐵̅𝐶 + 𝐴̅𝐵̅𝐶̅ + 𝐴𝐵̅𝐶̅ + 𝐴̅𝐵̅𝐶 + 𝐴𝐵𝐶 ̅ + 𝐴𝐵𝐶𝐷 + 𝐴̅𝐵̅𝐶̅ 𝐷 + 𝐴̅𝐵𝐶̅ 𝐷 ̅ + 𝐴𝐵𝐶̅ 𝐷 + 𝐴̅𝐵̅𝐶𝐷 + b) 𝑍 = 𝐴𝐵̅𝐶̅ 𝐷 + 𝐴̅𝐵𝐶𝐷 𝐴̅𝐵𝐶̅ 𝐷 + 𝐴𝐵̅𝐶𝐷 + 𝐴̅𝐵𝐶𝐷 Dadas las señales de entrada determine las señales de salida. (Flip flops activos en flanco de subida) Decodificador a) Elaborar la tabla de estados para un decodificador de tres entradas. b) Implementar el decodificador con compuertas lógicas propuesto en el numeral anterior. Arquitectura de Sistemas Digitales 133 Laboratorio Utilizando el protoboard comprobar la tabla de estados de las siguientes compuertas lógicas: 7404 7408 7432 7486 Arquitectura de Sistemas Digitales 134 5 UNIDAD 5 ELEMENTOS FUNCIONALES DE UN COMPUTADOR 5.1.1 RELACIÓN DE CONCEPTOS Buses: Son circuitos que conectan a la unidad central de procesamiento con el resto de los componentes del computador. Computador: Es una máquina digital electrónica que recibe y procesa información automáticamente a través de programas informáticos. Elementos funcionales: Son aquellos elementos que forman parte de una estructura de orden superior (En éste caso el computador) Mainframe: Conocida como computadora central. Es un gran computador capaz de realizar el procesamiento de datos complejos. Se utilizan como sistemas centrales de grandes organizaciones o empresas. Arquitectura de Sistemas Digitales 135 Microcomputadora: Es un tipo de computadora que utiliza un microprocesador como unidad central de procesamiento. Generalmente son computadoras que ocupan espacios físicos pequeños. Supercomputadora: Son computadoras de alto desempeño. Extremadamente potentes y capaces de realizar tareas de cálculo a una velocidad que equivale a cientos de veces la velocidad de una computadora convencional. Unidad Aritmético Lógica: Es un circuito digital que se encarga de realizar las operaciones aritméticas y lógicas que hacen parte del conjunto de operadores que tiene disponibles un computador. Unidad Central de Procesamiento: Es un circuito integrado que se encarga del control y procesamiento de la información en el sistema digital. Unidad de Control: Es un circuito digital que se encarga de controlar todas las operaciones del computador. Unidad de Entrada y Salida: Conjunto de interfaces que usan los dispositivos funcionales de un sistema de procesamiento de datos para comunicarse con los demás medios de información, usando señales recibidas o enviadas. Unidad de Memoria: Es un circuito digital diseñado para almacenar datos en forma binaria durante un intervalo de tiempo, usando estructuras y arreglos de registros con flip flops. 5.2 TEMA 1 EL COMPUTADOR La computación se centra en actividades que requieren del computador para lograr los objetivos propuestos. El computador es una máquina digital electrónica que recibe y procesa información automáticamente a través de programas informáticos. También se nombra al computador como computadora u ordenador. Los computadores se usan en diferentes áreas como: Medicina, Matemáticas, Ingeniería, Educación. La ventaja del computador radica en que por medio de un conjunto de instrucciones llamado programa, el usuario puede modificarlo de acuerdo a su requerimiento específico. Así la máquina Arquitectura de Sistemas Digitales 136 puede realizar simultáneamente diferentes tipos de tareas al procesar información de una amplia variedad. Las funciones básicas de un computador son: Procesar, almacenar y transferir información. 5.3 TEMA 2 TIPOS DE COMPUTADORES Supercomputadora. Es aquella máquina diseñada para realizar cálculos que requieren de altas velocidades para el procesamiento de la información. Este tipo de computadoras son utilizadas para fines muy específicos. Poseen un gran número de procesadores que trabajan en paralelo. Realizan billones de operaciones por segundo. Tomado de: http://www.muylinux.com/2015/07/14/tianhe-2-supercomputadora Mainframe. Es aquella máquina diseñada para procesar información de grandes empresas. La potencia de cálculo es menor a la de una supercomputadora. Realizan millones de operaciones por segundo. Arquitectura de Sistemas Digitales 137 Tomado de: http://blog.syncsort.com/2015/07/mainframe/breathing-new-life-into-the-mainframe/ Microcomputadoras. Es aquella máquina diseñada para propósitos generales. El componente principal es un microprocesador. Pueden ser: Computadora de escritorio, portátil. Tomado de: http://informatica1-17.blogspot.com.co/2015/01/las-microcomputadoras-o-pc.html 5.4 TEMA 3 UNIDAD CENTRAL DE PROCESAMIENTO La Unidad Central de Procesamiento o CPU es un circuito integrado que se encarga del control y procesamiento de la información en el sistema digital. Arquitectura de Sistemas Digitales 138 La CPU toma la información (Instrucciones) almacenada en la memoria y le realiza los siguientes pasos: Examina, interpreta y ejecuta. La Unidad Central de Procesamiento está compuesta por: Registros, unidad aritmético lógica y unidad de control. 5.4.1 UNIDAD ARITMÉTICO LÓGICA La unidad Aritmético Lógica o ALU es un circuito digital que se encarga de realizar las operaciones aritméticas y lógicas que hacen parte del conjunto de operadores que tiene disponibles un computador. Está formada por: Operadores aritméticos. Operadores lógicos. Operadores de desplazamiento. Registros para almacenar datos temporales. Registro acumulador. Registro de estado. Registro contador de programa. Registro de direcciones de interrupción. Operador aritmético Es un circuito electrónico encargado de realizar una o varias operaciones aritméticas tales como: Suma, resta, multiplicación y división. Operador lógico Es un circuito electrónico encargado de realizar una o varias operaciones lógicas tales como: Not, And, Or, Exor. Operador de desplazamiento Es un circuito electrónico encargado de realizar el corrimiento de los bits de una palabra, dato o registro hacia la derecha o hacia la izquierda. Normalmente el operador de desplazamiento está formado por compuertas lógicas. Arquitectura de Sistemas Digitales 139 Registros para almacenar datos temporales Son aquellos registros que tienen como propósito almacenar temporalmente datos y resultados intermedios. Registro acumulador Es aquel que se utiliza para almacenar los resultados del operador. Registro de estado También se conoce como flags (Banderas). Se utiliza para indicar el estado del procesador y de los resultados de ciertas operaciones. Los campos más comunes de éste registro son: Signo: Contiene el bit de signo del resultado de la última operación aritmética. Cero: Se coloca en 1 cuando el resultado es 0. Acarreo: Se coloca en 1 si una operación genera acarreo (suma) o préstamo (resta) del bit más significativo. Igual: Se coloca en 1 si el resultado de una comparación lógica es la igualdad. Desbordamiento: Usado para indicar un desbordamiento aritmético. Supervisor: Indica si la Unidad Central de Procesamiento funciona en modo de supervisor o usuario. Únicamente en modo supervisor se pueden ejecutar ciertas instrucciones privilegiadas y se puede acceder a ciertas áreas de memoria. Registro contador de programa. Es aquel que almacena la dirección de la siguiente instrucción a ejecutar. Registro de direcciones de interrupción. Es aquel que almacena la dirección de atención a la interrupción. 5.4.2 UNIDAD DE CONTROL La Unidad de Control se encarga de controlar todas las operaciones del computador. De esta forma obtiene e interpreta las instrucciones que se encuentran almacenadas en la memoria. De acuerdo a su interpretación le envía la información al componente adecuado para su manipulación. Determina las operaciones a realizar y el orden de ejecución. Arquitectura de Sistemas Digitales 140 Está formada por: Registro de instrucción. Controlador y decodificador. Secuenciador. Registro contador de programa. Reloj. Registro de instrucción Éste registro contiene el código de la instrucción con la que la Unidad de Control determina el conjunto de microoperaciones a realizar durante el ciclo de ejecución. Controlador y decodificador El controlador se encarga de interpretar la instrucción para su posterior proceso. El decodificador se encarga de extraer el código de operación de la instrucción en curso. Secuenciador Se encarga de generar órdenes necesarias para ejecutar la instrucción. Registro contador de programa. Es aquel que almacena la dirección de la siguiente instrucción a ejecutar. Reloj Es el encargado de generar pulsos periódicos para ejecutar una o varias microoperaciones en cada pulso de reloj. 5.5 TEMA 4 UNIDAD DE MEMORIA La memoria es un circuito integrado diseñado para almacenar datos en forma binaria durante un intervalo de tiempo, usando estructuras y arreglos de registros con flip flops. Celda de memoria Circuito electrónico que se usa para almacenar bits de datos en forma de 0 o 1, a través de una celda o flip- flop. Posee palabra de memoria, como un grupo de bits o celdas que representan instrucciones o datos de información de algún tipo. Arquitectura de Sistemas Digitales 141 Las memorias pueden estar diseñadas de flip flops tipo D, cada espacio de memoria o celda posee una dirección hexadecimal que corresponde exactamente a la posición de la celda donde se encuentra o se va a almacenar un dato. Fundamentos de las memorias Los elementos básicos de las memorias son: El medio o soporte donde se almacenan los datos como unos o ceros. El transductor que ubique en el soporte el dato requerido o que detecte su valor actual. El medio de direccionamiento, que permita leer, fijar o grabar la información en lugar y tiempos requeridos para lo cual hay tres condiciones: Debe presentar dos estados estables, como una magnitud física. Cambio de un estado a otro cuando se aplique una señal externa. Saber el estado en el cual se encuentra en todo momento. Los medios pueden ser discretos o sea un dispositivo físico individual que almacena cada bit, y continuos donde se almacenan unos bits a continuación de otros, en los medios discretos el acceso a los datos es más simple y rápido. Según el tiempo que los datos permanecen grabados se puede clasificar la memoria en: Clasificación de la memoria No volátil Volátil Con refresco Permanecen los datos, hasta que se realice una operación de escritura. La información desaparece cuando deja de suministrarse energía a la memoria. Aun cuando la memoria este alimentada, los datos se van degradando presentando instantes en que no se pueden leer, para lo cual, deben refrescarse periódica y continuamente. Lectura destructiva La lectura conlleva el borrado de la información e implica grabar el dato nuevamente Solo lectura o permanente Permanece la información y no se puede borrar, algunas necesitan un proceso electrónico especial para ser borradas. Arquitectura de Sistemas Digitales 142 5.6 TEMA 5 UNIDAD DE ENTRADA Y SALIDA Conjunto de interfaces que usan los dispositivos funcionales de un sistema de procesamiento de datos para comunicarse con los demás medios de información, usando señales recibidas o enviadas. Cuando el computador recibe una señal de otra interfaz se le llama señal de entrada y cuando envía una señal a otro dispositivo de datos se le llama señal de salida. Algunos elementos de entrada son: Mouse. Teclado. Scanner. Algunos elementos de salida son: Impresora. Monitor. Modem. Red. 5.7 TEMA 6 BUSES Son circuitos que conectan a la Unidad Central de Procesamiento con el resto de los componentes del computador. A través de estos llega a la CPU la información y los requerimientos de procesamiento desde el exterior y permiten transportar hacia afuera los resultados del procesamiento realizado. Bus principal Es el encargado de llevar la información administrándola internamente entre todos los dispositivos de entrada-salida interconectado con la memoria RAM. Se subdivide en: Bus de datos. Bus de direcciones. Bus de control. Arquitectura de Sistemas Digitales 143 Bus de datos. Es un bus bidireccional encargado de llevar datos e instrucciones desde el resto de unidades hacia la Unidad Central de Procesamiento o viceversa. Bus de direcciones. Contiene la información digital que envía la CPU a la memoria y demás dispositivos direccionales del sistema para seleccionar una posición de memoria, una unidad de entrada/salida o un registro particular de la misma. Bus de control. Se utiliza para coordinar, sincronizar y comunicarse con los dispositivos externos. 5.7.1 EJERCICIOS DE APRENDIZAJE. 1) Diseñar la etapa lógica de una ALU que permita realizar las siguientes operaciones: Not And Or Exor Solución. Para la implementación de la etapa lógica de la ALU se utilizan las cuatro compuertas correspondientes a las operaciones requeridas (Not, And, Or, Exor). Para la selección de la operación lógica a realizar se utiliza un multiplexor que posea cuatro entradas (Cada una correspondiente a una operación lógica). Como el número de entradas es 4 Se tiene 2n =4 Para ello n debe ser 2 22 = 4 El multiplexor posee 2 selectores. Los selectores se referencian con S. Estos se numeran como S0 y S1 La salida se referencia con Y. Arquitectura de Sistemas Digitales 144 Se utiliza A y B para los valores de entrada que van a ser operados. Nota: Tener en cuenta que S0 es el bit menos significativo y que S1 es el bit mas significativo. La tabla de estados que muestra el funcionamiento es: S1 S0 Y Operación 0 0 𝒁 = 𝑨𝑩 And 0 1 𝒁=𝑨+𝑩 Or 1 0 𝒁=𝑨⊕𝑩 Exor 1 1 ̅ 𝒁=𝑨 Not Así la etapa lógica de la ALU requerida es: Arquitectura de Sistemas Digitales 145 Autoría propia 2) Enunciar la secuencia para complementar el contenido del registro acumulador. Solución. La secuencia es la siguiente: a) Mover el contenido del acumulador al bus de datos. b) Mover el contenido del bus de datos al complementador. c) Activar la lógica del complementador. d) Mover el contenido del complementador al bus de datos. e) Mover el contenido del bus de datos al acumulador. 5.7.2 EJERCICIOS DE ENTRENAMIENTO Pautas para desarrollar los siguientes ejercicios: De acuerdo a los conceptos estudiados y a investigación previa desarrollar los siguientes ítems: 1) Consultar las características de dos (2) de los procesadores de última generación. 2) Elaborar un mapa conceptual de un computador de última generación. 3) Diseñar una ALU que permita realizar las siguientes operaciones: Suma Resta Arquitectura de Sistemas Digitales 146 And Or Exor 4) Elaborar un cuadro comparativo entre periféricos de entrada y periféricos de salida. 5) Investigar ¿Cuál es el ranking de las supercomputadoras? Laboratorio Utilizando el protoboard comprobar la tabla de funcionamiento de la ALU 74181 Arquitectura de Sistemas Digitales 147 6 UNIDAD 6 TIPOS DE ARQUITECTURAS Video: Arquitectura de un Ordenador ”Ver Video”: https://www.youtube.com/watch?v=-akEec5GTX8 6.1.1 RELACIÓN DE CONCEPTOS Arquitecturas clásicas: Son aquellas arquitecturas que se desarrollaron en las primeras computadoras electromecánicas y de tubos de vacío. Aun son usadas en procesadores empotrados de gama baja y son la base de la mayoría de las arquitecturas modernas. Arquitectura de Acumulador: Es aquella en la cual un operando esta implícitamente en el acumulador siempre leyendo e ingresando dato. Arquitectura de Computador: Es la estructura funcional de un computador. Arquitectura de Sistemas Digitales 148 Arquitectura de Pila: Es aquella en la cual no es necesario nombrar a los operandos ya que estos se encuentran en el tope de la pila. Arquitectura de Registros de Propósito General: Es aquella en la cual los registros se utilizan para almacenar datos o direcciones de forma flexible. Arquitectura de Registro - Registro: Es aquella en la cual se trabaja solo con los datos de los registros con el fin de evitar el acceso frecuente a memoria, lo cual ayuda a mejorar la velocidad, ya que, la memoria es más lenta. Arquitectura Harvard: Es aquella en donde el programa se almacena como un código numérico en la memoria, pero no en el mismo espacio de memoria ni en el mismo formato que los datos. Arquitectura ISA: Es aquella que detalla las instrucciones que una unidad central de procesamiento puede entender y ejecutar, o el conjunto de todos los comandos implementados por un diseño particular de una CPU. Arquitectura Von Newman: Es aquella en donde la unidad central de procesamiento se comunica a través de un solo bus con la memoria en la cual se almacenan tanto los códigos de instrucción del programa, como los datos que serán procesados por este. 6.2 TEMA 1 ARQUITECTURAS ISA Se denomina Arquitectura del conjunto de instrucciones (Instructión Set Architecture, ISA) Características. La interfaz entre el hardware y el software de bajo nivel. El conjunto de atributos es visible a: a) El programador en lenguaje de máquina. b) El sistema operativo. c) El compilador. Posee: a) b) c) d) e) Conjunto de registros visibles al programador. Conjunto de instrucciones de ensamblador. Tipos básicos de datos soportados por las instrucciones. Modos de direccionamiento. Mecanismos de Entrada / Salida. Arquitectura de Sistemas Digitales 149 Se diferencian por el tipo de almacenamiento interno que usa el procesador, definiendo a la vez su tipo de operando. 6.2.1 ARQUITECTURAS DE PILA. Características. Poseen operandos implícitos en el tope de la pila. El registro TOS (Top of stack) apunta al primer operando de entrada. El segundo operando de entrada es el que está una posición más abajo. El primer operando se descarta de la pila, el resultado ocupa el lugar del segundo y el registro TOS se actualiza para que apunte al resultado. Se emplean instrucciones push y pop para escribir datos en la pila y sacarlos de ella, respectivamente. 6.2.2 ARQUITECTURAS DE ACUMULADOR Características. Posee un operando implícito en el acumulador. El acumulador es el primer operando de entrada. El segundo operando es una posición de memoria. El resultado se escribe en el acumulador. 6.2.3 ARQUITECTURAS DE REGISTROS DE PROPÓSITO GENERAL Características. Un operando de entrada está en un registro. El segundo operando está en memoria. El resultado se escribe en un registro. Arquitectura de Sistemas Digitales 150 6.3 TEMA 2 ARQUITECTURAS REGISTRO - REGISTRO Se denomina Arquitectura Registro - Registro (Load / Store) Características. Registros como medio de almacenamiento interno del procesador (General Purpose Registers, GPRs) Acceso más rápido que a memoria. Eficientes para el compilador. Almacenamiento de variables. Menor tráfico de memoria. Mejor rendimiento. Instrucciones más compactas. Para cargar un registro con un valor desde memoria se emplean instrucciones load. Para transferir el resultado contenido en un registro a memoria se usan instrucciones store. 6.3.1 EJERCICIO DE APRENDIZAJE. Escribir por medio de instrucciones la secuencia de código para C= A+B Para: a) Arquitectura de Pila. b) Arquitectura de Acumulador. c) Arquitectura de Registros de Propósito General. Solución. A, B y C son variables que se almacenan en memoria. Arquitectura de Sistemas Digitales 151 a) Arquitectura de Pila PUSH A / Guarda el dato A en la pila PUSH B / Guarda el dato B en la pila ADD / Realiza la suma de A con B POP C / Recupera de la pila el resultado de la suma y se almacena / en C b) Arquitectura de Acumulador LOAD A / Se carga el registro acumulador con el dato A ADD B / Se almacena en el registro acumulador el resultado de / la suma de lo que contiene el registro acumulador / con B STORE C / Copia lo que contiene el registro acumulador a C c) Arquitectura de Registros de Propósito General LOAD R1, A / Se carga el registro R1 con el dato A LOAD R2, B / Se carga el registro R2 con el dato B ADD R3, R1, R2 / Se almacena en el registro R3 el resultado de la suma / de R2 con R3 Arquitectura de Sistemas Digitales 152 STORE R3, C / Copia R3 a C 6.3.2 EJERCICIOS DE ENTRENAMIENTO Pautas para desarrollar los siguientes ejercicios: De acuerdo a los conceptos estudiados y a investigación previa desarrollar los siguientes ítems: 1) Realizar un mapa cognitivo de las arquitecturas Von Newman y Harvard. 2) Elaborar un cuadro comparativo entre las arquitecturas: de pila, de acumulador, de registros de propósito general y de registro – registro. 3) Escribir por medio de instrucciones la secuencia de código para D= A+B+C Para: a) Arquitectura de Pila. b) Arquitectura de Acumulador. c) Arquitectura de Registros de Propósito General. 4) ¿Qué es una arquitectura superescalar? 5) Investigar los modos de direccionamiento. Dar un ejemplo por cada modo. 6) Investigar características sobre las siguientes arquitecturas: IBM Motorola HP INTEL Arquitectura de Sistemas Digitales 153 Traer a la memoria El exceso de electrones genera la carga negativa y la deficiencia de los mismos genera la carga positiva. No olvide que para medir la corriente eléctrica se debe conectar en serie el amperímetro con el elemento a medir. Tener en cuenta Para medir el voltaje se debe conectar en paralelo el voltímetro con el elemento a medir. Tener en cuenta Para trabajar con las leyes de Ohm, Watt y Joule las cantidades deben expresarse en las unidades fundamentales de Intensidad (amperios), voltaje (voltios), resistencia (ohmios) y potencia (vatios). Si se da una cantidad en múltiplos o submúltiplos, como sugerencia se debe realizar la conversión a las unidades fundamentales antes de realizar el(los) reemplazo(s). Tener en cuenta que al trabajar con condensadores electrolíticos estos tienen polaridad. No olvide que para alimentar a un transformador la señal se envía por el primario. Traer a la memoria Los diodos son componentes unidireccionales. No olvide que la función principal de un transistor es la amplificación de señales. Traer a la memoria Las compuertas lógicas Exor y Nexor sólo poseen dos entradas. Traer a la memoria En los mapas de Karnaugh al agrupar la mayor cantidad de unos posibles se obtiene la expresión lógica más simplificada. No olvide La conexión de flip flops permite construir contadores digitales. Traer a la memoria La tabla correspondiente a cada compuerta lógica resulta teniendo en cuenta su operador lógico. Tenga Presente Los circuitos secuenciales digitales tienen memoria. Arquitectura de Sistemas Digitales 154 Traer a la memoria Las instrucciones toman valores que equivalen a la función que debe realizar el microprocesador. Tenga presente La memoria es un dispositivo que almacena datos en forma binaria. No olvide La Unidad Central de Procesamiento está formada por la unidad de control y la unidad aritmético lógica. Arquitectura de Sistemas Digitales 155 7 GLOSARIO Álgebra booleana: Son las Matemáticas de los Sistemas digitales. Utiliza variables lógicas (Toman valores de 0 ó 1) y operadores lógicos (Yes, Not, And, Or, Nand, Nor, Exor, Nexor). Arquitecturas clásicas: Son aquellas arquitecturas que se desarrollaron en las primeras computadoras electromecánicas y de tubos de vacío. Aun son usadas en procesadores empotrados de gama baja y son la base de la mayoría de las arquitecturas modernas. Arquitectura de Acumulador: Es aquella en la cual un operando esta implícitamente en el acumulador siempre leyendo e ingresando dato. Arquitectura de Computador: Es la estructura funcional de un computador. Arquitectura de Pila: Es aquella en la cual no es necesario nombrar a los operandos ya que estos se encuentran en el tope de la pila. Arquitectura de Registros de Propósito General: Es aquella en la cual los registros se utilizan para almacenar datos o direcciones de forma flexible. Arquitectura de Registro - Registro: Es aquella en la cual se trabaja solo con los datos de los registros con el fin de evitar el acceso frecuente a memoria, lo cual ayuda a mejorar la velocidad, ya que, la memoria es más lenta. Arquitectura Harvard: Es aquella en donde el programa se almacena como un código numérico en la memoria, pero no en el mismo espacio de memoria ni en el mismo formato que los datos. Arquitectura ISA: Es aquella que detalla las instrucciones que una unidad central de procesamiento puede entender y ejecutar, o el conjunto de todos los comandos implementados por un diseño particular de una CPU. Arquitectura Von Newman: Es aquella en donde la unidad central de procesamiento se comunica a través de un solo bus con la memoria en la cual se almacenan tanto los códigos de instrucción del programa, como los datos que serán procesados por este. Átomo: Es la unidad básica de toda la materia. De igual forma es la estructura que define a todos los elementos y tiene propiedades químicas bien definidas. Buses: Son circuitos que conectan a la unidad central de procesamiento con el resto de los componentes del computador. Arquitectura de Sistemas Digitales sfs 15 6 Capacitor: Es un elemento que almacena energía en forma de campo eléctrico. También se denomina condensador. Circuito eléctrico: Es la conexión por medio de conductores de elementos como: Fuente de alimentación, resistencias bobinas, diodos, transistores que van a utilizar la corriente eléctrica para cumplir un objetivo determinado. Circuito integrado: Es un circuito compuesto de resistencias, condensadores, transistores y diodos. Circuito integrado 555: Es un circuito que se utiliza en la generación de temporizadores, pulsos y oscilaciones. Circuito lógico (o digital): Es aquel que maneja la información utilizando el sistema binario (0 y 1). Circuito mixto: Es un circuito donde se combinan las conexiones serie y paralelo. Circuito paralelo: Es un circuito donde todos los componentes coinciden entre sus terminales. Circuito serie: Es un circuito en el cual los elementos forman una sola trayectoria. Codificador: Es un circuito combinacional. Se obtiene en la salida el código binario correspondiente a la entrada que se activa. (Colocada en uno). Componentes digitales: Son aquellos dispositivos que forman parte de un circuito electrónico digital. Compuertas digitales: Son funciones básicas de los sistemas electrónicos digitales; trabajan con números binarios. Compuerta digital AND: Es aquella que realiza la operación denominada multiplicación lógica. Compuerta digital EXOR: Es aquella que realiza la operación de comparación (Dos entradas). Se obtiene un nivel alto en la salida cuando las entradas son diferentes. Compuerta digital NAND: Es aquella que realiza la operación inversa de la compuerta AND. Se puede utilizar como compuerta universal ya que se pueden combinar varias de éstas compuertas para implementar el resto de las compuertas lógicas básicas (Por ejemplo: NOT, AND, OR, EXOR, etc.) Compuerta digital NEXOR: Es aquella que realiza la operación de comparación (Dos entradas). Se obtiene un nivel alto en la salida cuando las entradas son iguales. Compuerta digital NOR: Es aquella que realiza la operación inversa de la compuerta OR. Compuerta digital NOT: Es aquella que invierte el valor de la entrada (Operación de negación o complemento) Compuerta digital OR: Es aquella que realiza la operación denominada suma lógica. Compuerta digital YES: Es aquella que amplifica la señal. Se obtiene en la salida el mismo bit de entrada. Arquitectura de Sistemas Digitales sfs 15 7 Computador: Es una máquina digital electrónica que recibe y procesa información automáticamente a través de programas informáticos. Corriente: Es la cantidad de electrones en movimiento que se mueven por un medio conductor. Corriente alterna: Es aquella que cambia su magnitud y dirección con el tiempo. Se mueve de una dirección a otra en un período de tiempo dado. Corriente continua: Es aquella que idealmente no cambia con el tiempo; además fluye en una sola dirección. Decodificador: Es un circuito combinacional. Dado el código binario en la entrada se activa (Coloca en uno) la salida correspondiente a dicho código. Demultiplexor: Es un circuito combinacional que permite seleccionar a cuales de las salidas (mediante selectores) pasará la entrada. Diodo: Es un elemento que permite la circulación de la corriente eléctrica a través de él en un solo sentido. Electricidad: Conjunto de fenómenos físicos relacionados con la presencia y flujo de cargas eléctricas. Electroestática: Parte de la física que estudia las interacciones entre las cargas eléctricas en reposo. Electrón: Es una partícula subatómica con carga eléctrica negativa. Gira alrededor del núcleo. Electrónica: Es el área de la Ingeniería que se fundamenta en el control del flujo de electrones que circulan por un medio conductor. Elementos funcionales: Son aquellos elementos que forman parte de una estructura de orden superior (En éste caso el computador) Flip Flop: Es un circuito secuencial que está conformado por compuertas lógicas. Se conoce como un dispositivo de memoria. Frecuencia: Es el número de ciclos en un período de tiempo dado (Cantidad de veces que se repite la señal) Inductor: Es un elemento que almacena energía en forma de campo magnético. También se denomina bobina. Ley: Es una proposición científica en la que se afirma una relación constante entre dos o más variables, cada una de las cuales representa una propiedad. Ley de Joule: Ley que relaciona a las leyes de ohm y watt. Ley de Ohm: Ley que relaciona al voltaje, la corriente y la resistencia. Ley de Watt: Ley que relaciona al voltaje, la corriente y la potencia. Magnitud: Propiedad característica de un cuerpo, sustancia o fenómeno físico que puede ser cuantificable. Arquitectura de Sistemas Digitales sfs 15 8 Mainframe: Conocida como computadora central. Es un gran computador capaz de realizar el procesamiento de datos complejos. Se utilizan como sistemas centrales de grandes organizaciones o empresas. Mapas de Karnaugh: Método sistemático de simplificación de expresiones lógicas. Materia: Es todo lo que ocupa espacio. Tiene forma, peso, dimensiones. Método: Modo ordenado y sistemático de proceder para llegar a un resultado o fin determinado. Microcomputadora: Es un tipo de computadora que utiliza un microprocesador como unidad central de procesamiento. Generalmente son computadoras que ocupan espacios físicos pequeños Multiplexor: Es un circuito combinacional que permite seleccionar de las entradas (mediante selectores) cuál de ellas pasará a la salida. Neutrón: Es una partícula subatómica sin carga neta. Se encuentra en el núcleo del átomo. Período: Es el tiempo que dura un ciclo de la señal. También es lo que se demora la señal en completarse. Potencia: Es la velocidad de suministro (Fuente de alimentación) y de consumo (Lámpara, motor, circuito, etc.) de la energía eléctrica. Propiedades: Son reglas que se obtienen a partir de los axiomas y deben ser demostradas mediante estos. Propiedad asociativa: Enuncia que el resultado en la salida es el mismo, independiente de la forma en que se agrupen las variables de entrada. Propiedad conmutativa: Enuncia que al cambiar el orden de las variables de entrada, permanece invariable el resultado que se obtiene en la salida. Propiedad distributiva: Enuncia la relación entre la multiplicación lógica y la suma lógica. Protón: Es una partícula subatómica con carga eléctrica positiva. Se encuentra en el núcleo del átomo. Registro: Es un dispositivo electrónico semiconductor creado a partir de implementaciones con flip flops los cuales permiten el manejo de datos usando circuitos combinatorios y secuenciales específicos. Reglas: Son los métodos para llevar a cabo una operación (En este caso, operación lógica. Resistencia: Es la oposición que ofrece un material al paso de la corriente eléctrica. Supercomputadora: Son computadoras de alto desempeño. Extremadamente potentes y capaces de realizar tareas de cálculo a una velocidad que equivale a cientos de veces la velocidad de una computadora convencional. Arquitectura de Sistemas Digitales sfs 15 9 Transformador: Es un elemento que permite aumentar o disminuir la tensión en un circuito eléctrico de corriente alterna. Transistor: Es un elemento utilizado para entregar una señal de salida en respuesta a una señal de entrada. Unidad Aritmético Lógica: Es un circuito digital que se encarga de realizar las operaciones aritméticas y lógicas que hacen parte del conjunto de operadores que tiene disponibles un computador. Unidad Central de Procesamiento: Es un circuito integrado que se encarga del control y procesamiento de la información en el sistema digital. Unidad de Control: Es un circuito digital que se encarga de controlar todas las operaciones del computador. Unidad de Entrada y Salida: Conjunto de interfaces que usan los dispositivos funcionales de un sistema de procesamiento de datos para comunicarse con los demás medios de información, usando señales recibidas o enviadas. Unidad de Memoria: Es un circuito digital diseñado para almacenar datos en forma binaria durante un intervalo de tiempo, usando estructuras y arreglos de registros con flip flops. Voltaje: Es la diferencia de cargas o de potencial que existe entre dos puntos con diferente polaridad. Voltaje eficaz: Es el valor del voltaje equivalente en DC. Voltaje pico: Es el valor máximo tomado desde el eje de referencia (eje del tiempo) hasta el pico positivo o pico negativo. Voltaje pico a pico: Es el valor absoluto del voltaje entre el pico positivo y el pico negativo. Arquitectura de Sistemas Digitales 160 8 BIBLIOGRAFÍA Boylestad, R. (2011). Introducción al análisis de circuitos. (12 Ed). Pearson Educación, México. Dorf, R & Svoboda, J. (2011). Circuitos eléctricos. (8 Ed). Alfaomega. Floyd, T. (2006). Fundamentos de Sistemas Digitales. (9 Ed). Pearson Educación, España. Floyd, T. (2007). Principios de circuitos eléctricos. (8 Ed). Pearson Educación, México. Malvino, A & Bates, D. (2007). Principios de Electrónica. (7 Ed). Aravaca, Madrid, España.: McGraw-Hill/Interamericana España, S.A.U. de Quiroga, P. (2010). Arquitectura de Computadoras. (1 Ed). Alfaomega. San Miguel, P. (2010). Electrónica general. (2 Ed). Paraninfo, España. Stallings, W. (2006). Organización y Arquitectura de Computadores. (7 Ed). Pearson Educación, España. Tocci, R, Widmer, N & Moss,G. (2007). Sistemas Digitales. Principios y aplicaciones. (10 Ed). Pearson Educación, México.