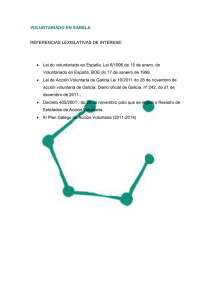
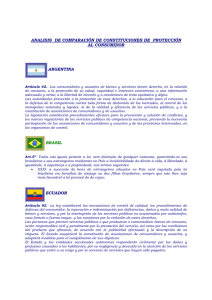
Proyecto de Final de Carrera Ingeniero Industrial Elaboración de fórmulas analíticas y tablas de cálculo para las estructuras metálicas de acero según la normativa Eurocódigo 3 ANEXO A: Vigas ANEXO B: Análisis de vigas en voladizo ANEXO C: Análisis de vigas sobre dos apoyos simples ANEXO D: Análisis de vigas simples apoyadas en un extremo y empotradas en el otro ANEXO E: Análisis de vigas biempotradas ANEXO F: Análisis de vigas continuas Autor: Maribel Tejerizo Fernández Director: Frederic Marimon Carvajal Convocatoria: Abril 2015 (Plan 94) Escola Tècnica Superior d’Enginyeria Industrial de Barcelona Anexos A, B, C, D, E y F Pág. 1 Sumario SUMARIO ____________________________________________________ 1 A. VIGAS ___________________________________________________ 5 B. ANÁLISIS DE VIGAS EN VOLADIZO __________________________ 8 B.1 Voladizo con carga puntual en el extremo ........................................................ 8 B.2 Voladizo con carga puntual en una sección cualquiera.................................. 11 B.3 Voladizo con carga repartida .......................................................................... 15 B.4 Voladizo con carga triangular repartida en sentido creciente ......................... 17 B.5 Voladizo con carga triangular repartida en sentido creciente, en el extremo libre ................................................................................................... 19 B.6 Voladizo con carga triangular repartida en sentido creciente, en el extremo del empotramiento ............................................................................ 24 B.7 Voladizo con carga triangular repartida en sentido decreciente ..................... 28 B.8 Voladizo con carga triangular repartida en sentido decreciente, en el extremo del empotramiento ............................................................................ 30 B.9 Voladizo con carga repartida creciente con p1 y p2 ........................................ 34 B.10 Voladizo con carga repartida creciente y decreciente .................................. 37 B.11 Voladizo con momento flector, M, aplicado en una sección C ..................... 42 B.12 Voladizo con momento flector, M, en el extremo libre .................................. 46 C. ANÁLISIS DE VIGAS SOBRE DOS APOYOS SIMPLES __________ 48 C.1 Viga biapoyada con carga puntual en una sección de la viga........................ 48 C.2 Viga biapoyada con carga puntual en el medio de la viga ............................. 52 C.3 Viga biapoyada con dos cargas puntuales ..................................................... 54 C.4 Viga biapoyada con carga repartida ............................................................... 58 C.5 Viga biapoyada con carga repartida en el lado de uno de los apoyos ........... 60 C.6 Viga biapoyada con carga repartida en una zona .......................................... 64 C.7 Viga biapoyada con carga triangular repartida ............................................... 70 C.8 Viga biapoyada con carga triangular sentido decreciente en un extremo...... 73 C.9 Viga biapoyada con carga triangular sentido creciente en un extremo.......... 77 C.10 Viga biapoyada con carga triangular sentido creciente en un extremo........ 81 C.11 Viga biapoyada con carga triangular sentido creciente en un extremo........ 84 C.12 Viga biapoyada con carga triangular creciente y decreciente ...................... 87 C.13 Viga biapoyada con carga triangular creciente y decreciente simétrica....... 91 Pág. 2 Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 C.14 Viga biapoyada con carga repartida trapezoidal .......................................... 93 C.15 Viga biapoyada con un momento flector aplicado en un extremo ............... 97 C.16 Viga biapoyada con dos momentos flectores aplicados en cada extremo y sentido opuesto ............................................................................. 99 C.17 Viga biapoyada con dos momentos flectores aplicados en cada extremo y mismo sentido ............................................................................. 101 C.18 Viga biapoyada con un momento flector M, aplicado en una sección C ... 103 D. ANÁLISIS DE VIGAS SIMPLES APOYADAS EN UN EXTREMO Y EMPOTRADAS EN EL OTRO ______________________________ 107 D.1 Viga apoyada y empotrada con carga puntual en una sección ................... 109 D.2 Viga apoyada y empotrada con carga puntual en la sección central .......... 112 D.3 Viga apoyada y empotrada con dos cargas puntuales ................................ 115 D.4 Viga apoyada y empotrada con carga repartida .......................................... 118 D.5 Viga apoyada y empotrada con carga repartida en un tramo ...................... 120 D.6 Viga apoyada y empotrada con carga repartida creciente .......................... 123 D.7 Viga apoyada y empotrada con carga repartida creciente en el extremo del apoyo ...................................................................................................... 125 D.8 Viga apoyada y empotrada con carga repartida decreciente ...................... 127 D.9 Viga apoyada y empotrada con carga repartida decreciente en el extremo del apoyo ........................................................................................ 129 D.10 Viga apoyada y empotrada con carga repartida decreciente en el extremo del empotramiento ......................................................................... 132 D.11 Viga apoyada y empotrada con carga repartida decreciente y decreciente ................................................................................................... 135 D.12 Viga apoyada y empotrada con carga repartida decreciente p1 y p2 ....... 138 D.13 Viga apoyada y empotrada con momento aplicado en una sección ......... 140 E. ANÁLISIS DE VIGAS BIEMPOTRADAS ______________________ 142 E.1 Viga biempotrada con carga puntual en una sección de la viga .................. 144 E.2 Viga biempotrada con carga puntual en la sección central.......................... 147 E.3 Viga biempotrada con dos cargas puntuales ............................................... 149 E.4 Viga biempotrada con carga repartida ......................................................... 152 E.5 Viga biempotrada con carga repartida en el extremo .................................. 154 E.6 Viga biempotrada con carga repartida en un tramo ..................................... 158 E.7 Viga biempotrada con carga repartida creciente.......................................... 162 E.8 Viga biempotrada con carga repartida creciente en el extremo................... 164 Anexos A, B, C, D, E y F Pág. 3 E.9 Viga biempotrada con carga repartida decreciente en el extremo ............... 168 E.10 Viga biempotrada con carga repartida creciente p1 y p2 ........................... 172 E.11 Viga biempotrada con carga repartida decreciente y creciente ................. 174 E.12 Viga biempotrada con carga repartida creciente y decreciente ................. 177 E.13 Viga biempotrada con carga repartida creciente y decreciente ................. 180 E.14 Viga biempotrada con carga repartida trapezoidal ..................................... 183 E.15 Viga biempotrada con momento aplicado en una sección ......................... 187 F. ANÁLISIS DE VIGAS CONTINUAS __________________________ 190 F.1 Viga continua de dos vanos iguales con dos cargas puntuales aplicadas ... 190 F.2 Viga continua de dos vanos iguales con carga repartida ............................. 192 F.3 Viga continua de tres vanos iguales con tres cargas puntuales aplicadas... 195 F.4 Viga continua de tres vanos iguales con carga repartida ............................. 197 F.5 Viga continua de dos vanos desiguales con carga repartida........................ 199 F.6 Viga continua de tres vanos desiguales con carga repartida ....................... 204 Pág. 4 Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 Anexos A, B, C, D, E y F Pág. 5 A. Vigas A continuación se hace una breve explicación de los procedimientos usados para calcular las reacciones, los esfuerzos cortantes y momentos flectores, así como la obtención de los diagramas de esfuerzos cortantes y momentos flectores, los ángulos de giro y flecha en determinadas secciones y la ecuación de la elástica. Cálculo de las reacciones Son tres las ecuaciones de equilibrio de las que se dispone para calcular las reacciones en las ligaduras: sumatorio de fuerzas verticales y horizontales en una sección igual a cero, y la tercera que indica la condición de ser nulo el momento resultante de todas estas fuerzas respecto de cualquier punto (Ec. A.1). M x 0 F v F 0 h 0 (Ec. A.1) Obtención de los diagramas de esfuerzos cortantes y momentos flectores Para dibujar los diagramas primero se han calculado los esfuerzos cortantes y momentos flectores por tramos. Estos tramos se han definido en función de la geometría y el tipo de carga aplicada en cada una de las estructuras. El criterio de signos que se ha usado para dibujar los diagramas es el siguiente (Fig. A.1): T M T T+dT + dx M+dM M T+dT - M+dM dx Fig. A.1 Criterio de signos de esfuerzo cortante y momento flector El esfuerzo cortante es positivo si la resultante de las fuerzas verticales situadas a la izquierda de la sección tiene dirección hacia arriba, en cambio será negativo si la resultante tiene dirección hacia abajo. El momento flector es positivo cuando las fibras comprimidas están situadas por encima de la fibra neutra, el momento es negativo cuando las fibras comprimidas están por debajo. Pág. 6 Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 Obtención de los ángulos de giro y las flechas Para obtener los ángulos de giro y los desplazamientos de forma genérica (en cualquier tramo de la estructura) es necesario calcular la ecuación diferencial de la elástica. En cambio, si lo que interesa es calcular únicamente estos valores en ciertas secciones de la estructura es suficiente con aplicar los teoremas de Mohr. A continuación se indica el procedimiento a seguir para obtener la ecuación de la elástica y seguidamente se explican los teoremas de Mohr. Obtención de la ecuación de la elástica A partir de la relación existente entre el momento flector y la curvatura (Ec. 4.2) de la directriz deformada se obtiene la expresión exacta de la curvatura. Debido a que los corrimientos son pequeños se puede despreciar el infinitésimo de orden superior de esta expresión (Ec. A.2), y obtener de esta manera la ecuación diferencial de la elástica. 1 M EI → 1 d 2w dx 2 dw 2 1 dx 3 → 2 d 2w M dx 2 EI (Ec. A.2) Integrando dos veces (Ec. A.3 y Ec. A.4) la ecuación diferencial de la elástica (Ec. A.2), se obtiene la ecuación de corrimiento transversal (Ec. A.4). Primera integral dw M dx C1 dx EI (Ec. A.3) Segunda integral M wx dx C1 C2 EI (Ec. A.4) Al hacer la doble integración, aparecen dos constantes C1 y C2, el valor de las cuales se obtiene a partir de las condiciones de contorno de la estructura. Una de las condiciones que se ha de cumplir siempre, es que el corrimiento vertical en los enlaces siempre es nulo. La segunda condición de contorno depende de la aplicación de las cargas sobre la estructura, por tanto para cada caso es distinto. Si por las características de la estructura es conocida la sección de la viga donde la flecha es máxima, la derivada del corrimiento transversal (Ec. A.3) es nula en esta sección. Anexos A, B, C, D, E y F Pág. 7 Teoremas de Mohr Con la aplicación de los Teoremas de Mohr se calculan los valores exactos de giros y flechas en secciones concretas. Debido a la geometría de las estructuras estudiadas se ha considerado importante calcular los giros en los enlaces articulados y extremos libres (caso del voladizo), aunque en función de la carga aplicada también se han aplicado estos teoremas en distintas secciones de las vigas. 1er Teorema de Mohr El primer teorema de Mohr relaciona los giros entre dos secciones A y B (Ec. A.5). B M dx EI A B A (Ec. A.5) 2º Teorema de Mohr El segundo teorema de Mohr (Ec. A.6) permite obtener el valor de la flecha en una sección determinada de la viga. B M x B x dx EI A (Ec. A.6) Pág. 8 Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 B. Análisis de vigas en voladizo Todos los voladizos cumplen las siguientes condiciones es el extremo empotrado (sección B): M B 0 (sumatorio de momentos respecto el empotramiento es nulo), B 0 (ángulo de giro en el empotramiento es nulo) y B 0 (flecha o desplazamiento vertical en el empotramiento es nulo). Criterio de signos Flechas: ↓ Ángulos de giro Reacciones verticales Momentos positivas negativos ↑ positivas negativos B.1 Voladizo con carga puntual en el extremo Cálculo de las reacciones A partir de las ecuaciones de la estática sumatorio de momentos respecto del empotramiento (Ec. B.1) sea nulo y suma de fuerzas verticales también cero (Ec. B.2) se obtiene el valor de las reacciones, RB y MB. M F v B 0 → M B PL 0 → RB P (Ec. B.1) (Ec. B.2) Anexos A, B, C, D, E y F Pág. 9 Diagramas de esfuerzos cortantes y momento flector El esfuerzo cortante es constante e igual a la carga puntual P (Ec. B.3) en todo el voladizo. El momento flector no es constante, puesto que depende de x, distancia entre el extremo del voladizo y la sección (Ec. B.4). El momento flector en el extremo A es cero, y máximo en el empotramiento B. TAB P (Ec. B.3) M AB ( x) Px (Ec. B.4) DEC DMF Ángulos de giro y flecha 1er Teorema de Mohr Se aplica el 1er Teorema de Mohr para calcular el ángulo de giro del extremo libre, Ec. B.5, ya que el ángulo de giro en B es cero (θB=0) por tratarse de un empotramiento. A 0 Px A B dx → EI BL 0 Px 2 PL2 A 2 EI 2 EI L (Ec. B.5) 2o Teorema de Mohr Se aplica el 2o Teorema de Mohr para calcular la flecha en el extremo libre, Ec. B.6. A0 A Px ( x A x)dx EI BL 0 Px 3 A → 3EI L A 0 → A L PL3 3EI Px 2 EI (Ec. B.6) Pág. 10 Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 Ecuación de la elástica A partir de la ecuación diferencial de la elástica, Ec. B.7, e integrando doblemente esta ecuación, Ec. B.8 y B.9, se obtiene la ecuación de corrimiento transversal. d 2w M 2 dx EI (Ec. B.7) w x Px Px 2 dx C1 EI 2 EI (Ec. B.8) Px 2 Px 3 wAB ( x) C1 dx C1 x C2 6 EI 2 EI (Ec. B.9) AB Se ha obtenido la ecuación de la elástica con constantes que se han de determinar a partir de las condiciones de contorno. La primera condición que se impone es el valor de la flecha del extremo libre calculado por el 2º teorema de Mohr, Ec. B.10. wAB ( x 0) C2 PL3 3EI (Ec. B.10) La segunda condición que se impone es que el corrimiento transversal en el empotramiento es cero, Ec. B.11. wAB ( x L) 0 → wAB ( x L) PL3 PL3 PL2 C1L 0 → C1 6 EI 3EI 2 EI (Ec. B.11) Finalmente se obtiene la ecuación de la elástica, Ec. B.12. wAB ( x) p x 3 3L2 x 2 L3 6 EI (Ec. B.12) Anexos A, B, C, D, E y F Pág. 11 B.2 Voladizo con carga puntual en una sección cualquiera Cálculo de las reacciones Se sigue el mismo procedimiento que en el apartado B.1 Voladizo con carga puntual en el extremo libre del voladizo: sumatorio de momentos respecto del empotramiento y suma de fuerzas verticales han de ser nulos, obteniendo para este caso las reacciones en el empotramiento: M B Pb RB P Diagramas de esfuerzos cortantes y momento flector Se ha dividido el voladizo en dos partes, tramo AC y tramo CB. En el primer tramo tanto el esfuerzo cortante como el momento flector son cero debido a que en esta primera zona no hay ninguna carga aplicada. En el segundo tramo el cortante es constante e igual a la carga P (Ec. B.13) y el momento flector depende de la distancia (x-a), siendo nulo en la sección C y máximo en el empotramiento (Ec. B.14). TCB P (Ec. B.13) M CB ( x) P( x a) (Ec. B.14) DEC DMF Pág. 12 Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 Ángulos de giro y flecha 1er Teorema de Mohr Se aplica el 1er Teorema de Mohr para calcular el ángulo de giro en las secciones A y C (sección donde está aplicada la carga). Debido a que el ángulo de giro en B es cero (θB=0), se empieza calculando el giro de C, Ec. B.15. C a a P P( x a) P x2 a 2 L2 2aL C B dx ax → C 2 EI EI EI 2 L BL (Ec. B.15) A partir de las relaciones de geometría de la estructura, Ec. B.16, se obtiene el ángulo de giro, Ec. B.17. Lab → C P b2 2 EI b 2 L2 a 2 2aL → C (Ec. B.16) Pb 2 2 EI (Ec. B.17) A partir del valor θC se calcula el giro en el extremo libre del voladizo, Ec. B.18. A C 0 → A C Pb 2 2 EI (Ec. B.18) o 2 Teorema de Mohr o Para calcular la flecha en la sección C y en el extremo libre se aplica el 2 Teorema de Mohr. Para facilitar los cálculos se ha calculado la flecha en A usando la fórmula que relaciona el desplazamiento transversal con el área (en este caso es un triángulo) que queda debajo del diagrama de momentos y el centroide de esta área, Ec. B.19. A A M Área·centroide Pb 2 2 Pb3 → 3a 2b dx a b A EI EI 2 EI 3 6 EI B (Ec. B.19) Se calcula la flecha en la sección de la viga donde se aplica la carga (C), usando el método de las áreas, Ec. B.20. C C B M Área·centroide Pb 2 2 Pb3 dx b → C 3EI EI EI 2 EI 3 (Ec. B.20) Anexos A, B, C, D, E y F Pág. 13 Ecuación de la elástica Tramo AC A partir de la ecuación diferencial de la elástica, Ec. B.7, e integrando doblemente esta ecuación, Ec. B.21 y B.22, se obtiene la ecuación de corrimiento transversal. w 0dx C1 x (Ec. B.21) w( x) C1dx C1 x C2 (Ec. B.22) A partir del las condiciones de contorno se obtiene la ecuación de la elástica. Las condiciones de contorno que se imponen son el valor de las flechas calculados por el segundo teorema de Mohr, en el extremo libre, Ec. B.23, y en la sección donde se aplica la carga, Ec. B.24. wAC ( x 0) Pb 2 Pb 2 (3a 2b) → C2 (3a 2b) 6 EI 6 EI (Ec. B.23) wAC ( x a) Pb3 3EI (Ec. B.24) → wAC (a) C1a Pb 2 Pb3 Pb 2 → C1 (3a 2b) 2 EI 6 EI 3EI Finalmente se obtiene la ecuación de la elástica, Ec. B.25. wAC ( x) Pb 2 3a 3x 2b 6 EI (Ec. B.25) Tramo CB Se sigue el mismo procedimiento que para el tramo AC: integrando la ecuación de la elástica dos veces, Ec. B.26 y B.27. w P( x a) Px 2 Pax dx C1 x CB EI 2 EI EI (Ec. B.26) Px 2 Pax Px 3 Pax 2 wCB ( x) C1 dx C1 x C2 EI 6 EI 2 EI 2 EI (Ec. B.27) Pág. 14 Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 Seguidamente se imponen las condiciones de contorno. En este caso se imponen los valores de las flechas calculados por el segundo teorema de Mohr, en el empotramiento, Ec. B.28, y en la sección donde se aplica la carga, Ec. B.29. wCB ( x a) Pb3 3EI wCB ( x L) 0 → Pa 3 Pa 3 Pb3 C1a C2 6 EI 2 EI 3EI (Ec. B.28) PL3 PaL2 C1L C2 0 6 EI 2 EI → (Ec. B.29) Debido a que se han obtenido dos ecuaciones con dos incógnitas, se igualan los coeficientes C2 para obtener el valor de la constante C1, Ec. B.30. 2 Pa 3 2 Pb 3 PL3 PaL2 C1a C1L 6 EI 6 EI 6 EI 6 EI → C1 P 3a 2 3b 2 6 EI (Ec. B.30) Una vez obtenida la constante C1, substituyendo en la Ec. B.29, se halla el valor de C2,Ec. B.31. PL3 PaL2 P 3a 2 3b 2 L C2 0 → 6 EI 2 EI 6 EI C2 PL3 3PaL2 3PLa 2 3PLb 2 6 EI 6 EI 6 EI 6 EI (Ec. B.31) Substituyendo C1 y C2 en la Ec. B.27, se obtiene la ecuación de la elástica, Ec. B.32. wCB ( x ) P L x 2 2b a x 6 EI (Ec. B.32) Anexos A, B, C, D, E y F Pág. 15 B.3 Voladizo con carga repartida Cálculo de las reacciones Se sigue el mismo procedimiento que en el apartado B.1 Voladizo con carga puntual en el extremo libre del voladizo, obteniendo para este caso las reacciones en el empotramiento: MB pL2 2 RB pL Diagramas de esfuerzos cortantes y momento flector El esfuerzo cortante (Ec. B.33) es cero en el extremo libre de la viga, y aumenta de manera lineal hasta llegar al empotramiento de la viga, donde toma el valor máximo. El momento flector tampoco es constante, puesto que depende cuadráticamente de x (Ec. B.34). El momento flector en el extremo A es cero, y máximo en el empotramiento B ( M B TAB ( x) px M AB ( x) px 2 2 pL2 ). 2 (Ec. B.33) (Ec. B.34) DEC DMF Ángulos de giro y flecha er 1 Teorema de Mohr Se aplica el 1er Teorema de Mohr para calcular el ángulo de giro del extremo libre, Ec. B.35, ya que el ángulo de giro en B es cero (θB=0) por tratarse de un empotramiento. Pág. 16 Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 A0 0 px 2 A B dx 2 EI BL px3 pL3 A 6 EI 6 EI L → (Ec. B.35) 2o Teorema de Mohr Se aplica el 2o Teorema de Mohr para calcular la flecha en el extremo libre, Ec. B.36, sabiendo que xA=0. A 0 px 2 A ( x A x)dx 2 EI BL 0 px 4 A 8EI L → 0 → px3 2 EI L pL4 8EI (Ec. B.36) Ecuación de la elástica Integrando doblemente la ecuación diferencial de la elástica, Ec. B.7, se obtiene la ecuación de corrimiento transversal, Ec. B.37 y B.38. w x AB px 2 px3 dx C1 2 EI 6 EI px3 px 4 wAB ( x) C1 dx C1x C2 24 EI 6 EI (Ec. B.37) (Ec. B.38) Mediante las condiciones de contorno se obtiene la ecuación de la elástica. La primera condición de contorno que se impone es el valor de la flecha calculado por el segundo teorema de Mohr, en el extremo libre, Ec. B.39. wAB ( x 0) pL4 pL4 → C2 8 EI 8EI (Ec. B.39) La segunda condición que se impone es que el desplazamiento vertical es nulo en el empotramiento, Ec. B.40. wAB ( x L) 0 → wAB ( x L) pL4 pL4 4 pL3 C1L 0 → C1 24 EI 8EI 24 EI (Ec. B.40) Finalmente se obtiene la ecuación de la elástica, Ec. B.41. wAB ( x) p x 4 4 L3 x 3L4 24 EI (Ec. B.41) Anexos A, B, C, D, E y F Pág. 17 B.4 Voladizo con carga triangular repartida en sentido creciente Cálculo de las reacciones Siguiendo el mismo procedimiento que en el apartado B.1 Voladizo con carga puntual en el extremo libre del voladizo, se obtienen las reacciones en el empotramiento: pL2 MB 6 RB pL 2 Diagramas de esfuerzos cortantes y momento flector Tanto el esfuerzo cortante (Ec. B.42) como el momento flector (Ec. B.43) son crecientes y dependen de la distancia x. Toman su máximo valor en el extremo del empotramiento. TAB ( x) px 2 2L M AB ( x) (Ec. B.42) px3 6L (Ec. B.43) DEC DMF Ángulos de giro y flecha 1er Teorema de Mohr Se aplica el 1er Teorema de Mohr para calcular el ángulo de giro del extremo libre (Ec. B.44), ya que el ángulo de giro en B es cero (θB=0) por tratarse de un empotramiento. A0 px3 A B dx 6 LEI B L 0 px 4 pL3 → A 24 EI 6 LEI L (Ec. B.44) Pág. 18 Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 o 2 Teorema de Mohr o Se aplica el 2 Teorema de Mohr para calcular la flecha en el extremo libre, Ec. B.45), sabiendo que xA=0. A 0 px3 A ( x A x)dx 6 LEI BL 0 px5 A 30 LEI L → A 0 → A L px3 0 x dx 6 LEI pL4 30 EI (Ec. B.45) Ecuación de la elástica Integrando doblemente la ecuación diferencial de la elástica, Ec. B.46 y A.47, se obtiene la ecuación de corrimiento transversal. w px3 px 4 dx C1 x AB 6 LEI 24 LEI (Ec. B.46) px 4 px 5 wAB ( x) C1 dx C1 x C2 120 LEI 24 LEI (Ec. B.47) Condiciones de contorno La primera condición, Ec. B.48, que se impone es el valor de la flecha del extremo libre calculado por el 2º teorema de Mohr, Ec. B.45. wAB ( x 0) C2 pL4 30 EI (Ec. B.48) La segunda condición que se impone es que el corrimiento transversal en el empotramiento es cero, Ec. B.49). wAB ( x L) 0 → pL4 pL4 C1L 0 120 EI 30 EI → C1 pL3 24 EI (Ec. B.49) Substituyendo el valor de las constantes se obtiene la ecuación de la elástica, Ec. B.50. wAB ( x) p x 5 5 L4 x 4 L5 120 LEI (Ec. B.50) Anexos A, B, C, D, E y F Pág. 19 B.5 Voladizo con carga triangular repartida en sentido creciente, en el extremo libre Cálculo de las reacciones Siguiendo el mismo procedimiento que en el apartado B.1 Voladizo con carga puntual en el extremo libre del voladizo, se obtienen las reacciones en el empotramiento: MB pa 2 L a 2 3 RB pa 2 Diagramas de esfuerzos cortantes y momento flector El esfuerzo cortante es creciente en el tramo AC (Ec. B.51) y en el siguiente tramo se mantiene constante (Ec. B.52). El momento flector es creciente en todo el voladizo (Ec. B.53 y B.54). TAC ( x) px 2 2a (Ec. B.51) TCB ( x) pa 2 (Ec. B.52) M ( x) AC px3 6a (Ec. B.53) M ( x)CB pa 2 x a 2 3 (Ec. B.54) DEC DMF Pág. 20 Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 Ángulos de giro y flecha 1er Teorema de Mohr Se aplica el 1er Teorema de Mohr para calcular el ángulo de giro en la sección C, Ec B.55, ya que el ángulo de giro en B es cero (θB=0) por tratarse de un empotramiento. C a C B C pa pa 2a x dx → C 2 EI 2 EI 3 BL pa a 2 3L2 4aL 12 EI a x 2 2ax 3 L 2 → (Ec. B.55) Se vuelve a aplicar el 1er Teorema de Mohr para calcular el ángulo de giro en la sección libre del voladizo, Ec. B.56. A 0 p px3 pa a 2 3L2 4aL A C dx → A 6aEI 12 EI 6aEI C a A pa3 pa a 2 3L2 4aL 24 EI 12 → A 0 x4 4 a pa 3a 2 6 L2 8aL 24 EI (Ec. B.56) o 2 Teorema de Mohr Se aplica el 2o Teorema de Mohr para calcular la flecha en las secciones C y A, Ec. B.57 y B.58. Flecha en C a C a pa 5ax 2 x 3 2a 2 x pa 2 C x a (a x)dx → C 2 EI 6 3 3 L 2 EI 3 BL C pa a 3 5aL2 2 L3 4a 2 L 12 EI (Ec. B.57) Flecha en A La flecha en la sección A se obtiene a partir de la siguiente ecuación, Ec. B.58: A C C x A xC A0 M AC x A x EI C a (Ec. B.58) Anexos A, B, C, D, E y F Pág. 21 Primero se calcula la integral, Ec. B.59. A 0 A 0 3 M AC xA x px 0 x dx EI 6aEI C a C a pa a 3 5aL2 2 L3 4a 2 L 12 EI (Ec. B.59) Substituyendo y agrupando el resto de términos en la Ec. B.58, se obtiene la Ec. B.60: A pa pa 2 pa 4 a3 5aL2 2 L3 4a 2 L a 2 3L2 4aL 12 EI 12 EI 30 EI A pa pa 4 2aL2 2 L3 12 EI 30 EI → A pa a 3 5aL2 5 L3 30 EI → (Ec. B.60) Ecuación de la elástica Tramo CB Integrando doblemente la ecuación diferencial de la elástica, Ec. B.61 y B.62, se obtiene la ecuación de corrimiento transversal. w pa 2a pa x 2 2ax x dx C1 x CB 2 EI 3 2 EI 2 3 (Ec. B.61) pa x 2 2ax pa x 3 2ax 2 wCB ( x) C dx C1 x C2 1 2 EI 2 3 2 EI 6 6 (Ec. B.62) Condiciones de contorno La primera condición que se impone es que el valor de la flecha en el empotramiento es 0, Ec. B.63. pa L3 2aL2 C1L C2 0 2 EI 6 6 wCB ( x L) 0 → (Ec. B.63) La segunda condición que se impone, Ec. B.64, es que la flecha en la sección C es la calculada a partir del segundo teorema de Mohr, Ec. B.57. wCB ( x a ) pa a 3 4a 2 L 5aL2 2 L3 12 EI → pa pa a 3 2a 3 C1a C2 → a 3 4a 2 L 5aL2 2 L3 12 EI 2 EI 6 6 Pág. 22 Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 pa 4a 2 L 5aL2 2 L3 C1a C2 0 12 EI (Ec. B.64) Por tratarse de dos ecuaciones con dos incógnitas, se igualan los términos C2 de las Ec. B.63 y B.64, obteniendo el término C1, Ec. B.65. pa 3 pa L 2aL2 C1L 4a 2 L 5aL2 2 L3 C1a 12 EI 12 EI C1 L a → pa pa 3L3 7 aL2 4a 2 L → C1 3L3 7 aL2 4a 2 L 12bEI 12 EI (Ec. B.65) Substituyendo C1 en la Ec. B.64 se obtiene el valor de C2, Ec. B.66. pa pa 2 2 2 3 C2 4a L 5aL 2 L 3L3 7aL2 4a 2 L 12 EI 12bEI C2 pa 4a 2bL 5abL2 2bL3 3aL3 7 a 2 L2 4a 2 L2 4a 3 L 12bEI → (Ec. B.66) Finalmente se obtiene la ecuación de la elástica, Ec. B.67, substituyendo los valores de C1 y C2 obtenidos anteriormente en la Ec. B.62. wCB ( x) pa x 3 2ax 2 pa 3L3 7 aL2 4a 2 L x 2 EI 6 6 12bEI pa 4a 2bL 5abL2 2bL3 3aL3 7 a 2 L2 4a 2 L2 4a 3 L 12bEI wCB ( x) pa 12 EI → 3 2 2 2 2 2 a x a 3 L a x 2 L a L 3 3 3 3 (Ec. B.67) Tramo AC Integrando doblemente la ecuación diferencial de la elástica, Ec. B.68 y B.69, se obtiene la ecuación de corrimiento transversal. w x AC px3 pa x 4 dx C1 6aEI 6aEI 4 pa wAC ( x) 6 EI x5 pa C1 dx 6 EI 20 x5 C1x C2 20 (Ec. B.68) (Ec. B.69) Anexos A, B, C, D, E y F Pág. 23 Condiciones de contorno La primera condición, Ec. B.70, que se impone es que el valor de la flecha en la sección C es el calculado anteriormente, Ec. B.57. wAC ( x a ) pa a 3 4a 2 L 5aL2 2 L3 12 EI → pa 6 pa C1a C2 a3 4a 2 L 5aL2 2 L3 120 EI 12 EI (Ec. B.70) La segunda condición que se impone, Ec. B.71, es el valor de la flecha en el extremo del voladizo, calculado a partir del segundo teorema de Mohr, Ec. B.60. wAC ( x 0) pa 3 pa 3 a 5aL2 5L3 → C2 a 5aL2 5L3 30EI 30EI (Ec. B.71) Substituyendo C2 en la Ec. B.70 se obtiene el valor de C1, Ec. B.7) pa 6 pa 3 pa C1a a 5aL2 5L3 a 3 4a 2 L 5aL2 2 L3 120 EI 30 EI 12 EI C1 pa 15a 2 4aL2 30L2 120EI → (Ec. B.72) Finalmente se obtiene la ecuación de la elástica, Ec. B.73, substituyendo los valores de C1 y C2 obtenidos anteriormente en la Ec. B.69. x5 pa 15a 2 4aL2 30 L2 20 120 EI wAC ( x) pa 6 EI wAC ( x) px 9a 3 185aL2 24a 2 L 72 EI x 30paEI a 3 5aL2 5L3 (Ec. B.73) Pág. 24 Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 B.6 Voladizo con carga triangular repartida en sentido creciente, en el extremo del empotramiento Cálculo de las reacciones Siguiendo el mismo procedimiento que en el apartado B.1 Voladizo con carga puntual en el extremo libre del voladizo, se obtienen las reacciones en el empotramiento: MB pb 2 6 RB pb 2 Diagramas de esfuerzos cortantes y momento flector Tanto el esfuerzo cortante como el momento flector son crecientes en el tramo CB, (Ec. B.74 y B.75). En el tramo AC son nulos. TCB ( x) p( x a) 2 2b (Ec. B.74) p x a 6b (Ec. B.75) 3 M CB ( x) DEC DMF Anexos A, B, C, D, E y F Pág. 25 Ángulos de giro y flecha 1er Teorema de Mohr Se aplica el 1er Teorema de Mohr para calcular el ángulo de giro en la sección C, Ec. B.76, ya que el ángulo de giro en B es cero (θB=0) por tratarse de un empotramiento. C a C B C p ( x a )3 dx 6 bEI B a b → C p 6bEI a x 3 x 3a 3 x 2 a 2 → a3 x 3 2 4 a b pb3 24 EI (Ec. B.76) Por no haber cargas aplicadas en el tramo AC, el ángulo de giro de la sección A es el mismo que el de la sección C: θA= θC 2o Teorema de Mohr o Se aplica el 2 Teorema de Mohr para calcular la flecha en las secciones C y A, Ec. B.77 y Ec. B.78. Flecha en C p x a ( xC x)dx 6 bEI B a b C a C p C 6bEI C a 3 → C B a b px a dx 6bEI 4 a x5 4 2 3 3 2 4 ax 2a x 2a x a x → 5 a b C pb 4 30 EI (Ec. B.77) Flecha en A Para calcular la flecha en A, se aplica la fórmula que relaciona flechas y ángulos de giro, Ec. B.78. A C C x A xC A A 0 M xA x dx EI C a → 4 3 pb 4 b3 0 a → A pb pab 30 EI 24 EI 30 EI 24 EI Ecuación de la elástica Tramo CB Se integra doblemente la ecuación diferencial de la elástica, Ec. B.79 y Ec. B.80. (Ec. B.78) Pág. 26 Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 3 w px a p x4 3a 2 x 2 3 dx ax a3 x C1 x CB 6bEI 6bEI 4 2 p x4 3a 2 x 2 wCB ( x) ax3 a 3 x C1 dx 6bEI 4 2 wCB ( x) (Ec. B.79) → p x 5 ax 4 a 2 x 3 a 3 x 2 C1 x C2 6bEI 20 4 2 2 (Ec. B.80) Condiciones de contorno La primera condición que se impone es que el valor de la flecha en el empotramiento es cero, Ec. B.81. wCB ( x L) 0 p 6bEI → L5 aL4 a 2 L3 a3 L2 C1L C2 0 4 2 2 20 (Ec. B.81) La segunda condición que se impone, Ec. B.82, es el valor de la flecha en la sección C es el calculado mediante la ecuación, Ec. B.77. wCB ( x a) pb 4 30 EI → p 6bEI 4a 5 pb 4 C a C 1 2 30 EI 20 (Ec. B.82) Se trata de dos ecuaciones con dos incógnitas, igualamos el término C2, Ec. B.83. p 6bEI L5 aL4 a 2 L3 a 3 L2 p C1L 4 2 2 6bEI 20 C1 L a p 4b 5 5a 4 b b 5 120 EI 4a 5 pb 4 → C a 1 30 EI 20 → C1 p 5a 4 b 4 120bEI (Ec. B.83) Substituyendo el término C2 en una de las dos ecuaciones, Ec. B.81 o Ec B.82, se obtiene el término C1 , Ec. B.84. En este caso se ha usado la Ec. B.82. C2 pb 4 a5 p p 5a5 5ab 4 30 EI 30bEI 120bEI C2 pb 4 p a5 5ab 4 30 EI 120bEI → (Ec. B.84) Anexos A, B, C, D, E y F Pág. 27 Finalmente se obtiene la ecuación de la elástica, Ec. B.85, substituyendo los valores de C1 y C2 obtenidos anteriormente y agrupando términos. wCB ( x) p x5 ax 4 a 2 x3 a 3 x 2 p pb 4 p 4 4 5 a b x a 5 5ab 4 6bEI 20 4 2 2 120bEI 30 EI 120bEI wCB ( x) p x a 5 5b 4 x 5b 4 L b5 120bEI (Ec. B.85) Tramo AC Se integra doblemente la ecuación diferencial de la elástica, Ec. B.86 y B.87. w x C1 (Ec. B.86) wAC ( x) C1x C2 (Ec. B.87) AC Condiciones de contorno La primera condición, Ec. B.88, que se impone es que el valor de la flecha en el extremo libre de la viga, sección A, es el calculado anteriormente, Ec. B.78. pb 4 pab3 wAC ( x 0) 30 EI 24 EI pb 4 pab 3 → C2 30 EI 24 EI (Ec. B.88) La segunda condición que se impone, Ec. B.89, es el valor de la flecha en la sección C es el calculado anteriormente, la flecha en A, Ec. B.78. wAC ( x a ) pb 4 30 EI → C1 a C 2 pb 4 30 EI (Ec. B.89) Substituyendo C2 en la Ec. B.89 se obtiene el valor C1, Ec. B.90. C1 a pb 4 pab 3 pb 4 pb3 → C1 30 EI 24 EI 30 EI 24 EI (Ec. B.90) Finalmente se obtiene la ecuación de la elástica, Ec. B.91, substituyendo los valores de C1 y C2 obtenidos anteriormente y agrupando términos. wAC ( x) pb3 pb4 pab3 x 24 EI 30 EI 24 EI → w( x) pb3 5x 5a 4b 120 EI (Ec. B.91) Pág. 28 Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 B.7 Voladizo con carga triangular repartida en sentido decreciente Cálculo de las reacciones Siguiendo el mismo procedimiento que en el apartado B.1 Voladizo con carga puntual en el extremo libre del voladizo, se obtienen las reacciones en el empotramiento: MB pL2 3 RB pL 2 Diagramas de esfuerzos cortantes y momento flector Tanto el esfuerzo cortante (Ec. B.92) como el momento flector (Ec. B.93) son crecientes y dependen de la distancia x. Toman su máximo valor en el extremo del empotramiento. TAB ( x) px ( 2 L x) 2L M CB ( x) px 2 3L x 6L (Ec. B.92) (Ec. B.93) DEC DMF Ángulos de giro y flecha 1er Teorema de Mohr Se aplica el 1er Teorema de Mohr para calcular el ángulo de giro en el extremo de libre, sección A, Ec. B.94. El ángulo de giro en B es cero (θB=0) por tratarse de un empotramiento. Anexos A, B, C, D, E y F Pág. 29 A 0 px 2 (3L x) A B dx 6 LEI BL → p A 6 LEI 0 3Lx 3 x 4 pL3 4 L 8EI 3 (Ec. B.94) 2o Teorema de Mohr Se aplica el 2o Teorema de Mohr para calcular la flecha en el extremo libre, Ec. B.95. A 0 A px 2 (3L x) ( x A x)dx 6 LEI BL 0 → 0 p 3Lx 4 x5 A 6 LEI 4 5 L → A A L px3 (3L x) dx 6 LEI 11 pL4 120 EI (Ec. B.95) Ecuación de la elástica Integrando doblemente la ecuación diferencial de la elástica, Ec. B.96 y B.97, se obtiene la ecuación de corrimiento transversal. w x AB px 2 (3L x) 3 px3 px 4 dx C1 6 LEI 18EI 24 LEI 3 px3 px 4 px 4 px5 wAB ( x) C1 dx C1 x C2 24 EI 120 LEI 18EI 24 LEI (Ec. B.96) (Ec. B.97) Condiciones de contorno La primera condición que se impone, Ec. B.98, es el valor de la flecha del extremo libre calculado por el 2º teorema de Mohr, Ec. B.96. wAB ( x 0) C2 11 pL4 120 EI (Ec. B.98) La segunda condición que se impone es que el corrimiento transversal en el empotramiento es cero, Ec. B.99. wAB ( x L) 0 → pL4 pL4 11 pL4 15 pL3 C1L 0 → C1 24 EI 120 EI 120 EI 120 EI (Ec. B.99) Substituyendo el valor de las constantes se obtiene la ecuación de la elástica, Ec. B.100. wAB ( x) pL4 120LEI 15 x x 4 x 11 4 5 L L L (Ec. B.100) Pág. 30 Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 B.8 Voladizo con carga triangular repartida en sentido decreciente, en el extremo del empotramiento Cálculo de las reacciones Siguiendo el mismo procedimiento que en el apartado B.1 Voladizo con carga puntual en el extremo libre del voladizo, se obtienen las reacciones en el empotramiento: MB pb 2 3 RB pb 2 Diagramas de esfuerzos cortantes y momento flector Tanto el esfuerzo cortante como el momento flector son crecientes en el tramo CB (Ec. B.101 y B.102). En el tramo AC son nulos. TCB ( x) p ( x a )(b L x) 2b px a (2b L x) 6b (Ec. B.101) 2 M CB ( x) (Ec. B.102) DEC DMF Ángulos de giro y flecha 1er Teorema de Mohr Se aplica el 1er Teorema de Mohr para calcular el ángulo de giro en la sección C Ec. B.103, ya que el ángulo de giro en B es cero (θB=0) por tratarse de un empotramiento. Anexos A, B, C, D, E y F Pág. 31 C a C B p( x a)(b L x) dx → 2b B a b p x 4 2b 2a L x3 a 2 4ab 2aL x 2 C 2b L a 2 x → 6bEI 4 3 2 a b C p 4ab3 4b3 L 5b 4 72bEI → C a pb 3 8EI (Ec. B.103) A partir del valor θC se calcula el giro en el extremo libre del voladizo, Ec. B.104. A C 0 → A C Pb3 8EI (Ec. B.104) o 2 Teorema de Mohr o Se aplica el 2 Teorema de Mohr para calcular la flecha en la sección C, Ec. B.105. px a (2b L x) C ( xC x)dx → C 6 bEI B a b C a 2 p x a (2b L x) dx 6 bEI B a b C a 3 a p x 5 (2b L 3a ) x 4 (6a 2b 3a 2 L a 3 ) x 2 3 C ( 2 b L a ) ax ( L 2b)a 3 x 6bEI 5 4 2 a b C 11 pb 4 120 EI (Ec. B.105) Para calcular la flecha en A, se aplica la fórmula que relaciona flechas y ángulos de giro, Ec. B.106. A C C x A xC A 11 pb 4 15 pab3 120 EI 120 EI A 0 M xA x dx EI C a → A → A 11 pb 4 Pb3 0 a 120 EI 8EI pb3 4b 15L 120 EI (Ec. B.106) Ecuación de la elástica Tramo CB Integrando doblemente la ecuación diferencial de la elástica, Ec. B.107 y A.108, se obtiene la ecuación de corrimiento transversal. Pág. 32 Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 w px a (2b L x) dx → x CB 6bEI 2 w p x4 3aa 2b x 2 2 a b x3 a 3 b a x C1 x CB 6bEI 4 2 wCB ( x) (Ec. B.107) p x5 a b x 4 a 2b ax3 a 3b a 2 x 2 C1 x C2 6bEI 20 4 6 2 (Ec. B.108) Condiciones de contorno La primera condición que se impone es el valor de la flecha en el empotramiento es cero, Ec. B.109. wCB ( x L) 0 p L5 a b L4 a 2b aL3 a 3b a 2 L2 C1L C2 0 6bEI 20 4 2 2 → p 4a 5 20a 3b 2 4b5 20a 4b C1L C2 0 120bEI (Ec. B.109) La segunda condición que se impone, Ec. B.110, es que la flecha en la sección C es la calculada a partir del segundo teorema de Mohr, Ec. B.105. wCB ( x a) 11 pb 4 120 EI → p a 5 a b a 4 a 2b a 4 a 3b a 4 11 pb 4 C1a C2 6bEI 20 4 2 2 120 EI p 11 pb4 4a5 15a 4b C1a C2 120bEI 120 EI (Ec. B.110) Por tratarse de dos ecuaciones con dos incógnitas, se igualan los términos C2 de las ecuaciones 1.8.9 y 1.8.10, obteniendo el valor del término C1, Ec. B.111. p 11 pb 4 p 4a5 20a3b2 4b5 20a 4b C1L 4a5 15a 4b C1a 120bEI 120 EI 120bEI → C1 L a C1 p 11 pb 4 p 4a5 20a3b2 4b5 20a 4b 4a5 15a 4b 120bEI 120 EI 120bEI → pa 20a 3b 15b 4 5a 4 120bEI (Ec. B.111) Substituyendo C1 en la segunda condición de contorno, Ec. B.110, se obtiene el valor de C2, Ec. B.112. Anexos A, B, C, D, E y F Pág. 33 p pa 2 11 pb 4 4a5 15a 4b 20a3b 15b 4 5a 4 C2 120bEI 120bEI 120 EI → C2 pb 11b5 a 5 5a 4b 15ab 4 120bEI (Ec. B.112) Finalmente se obtiene la ecuación de la elástica, Ec. B.113 substituyendo los valores de C1 y C2 obtenidos anteriormente. p x5 5a b x 4 10 a 2 2ab x3 10 a3 3a 2b x 2 120bEI pa pb 20a3b 15b 4 5a 4 x 11b5 a5 5a 4b 15ab 4 120bEI 120bEI wCB ( x) wCB ( x) p 5 4 x a 5bx a 15b 4 x 4b5 15b 4 L 120bEI → (Ec. B.113) Tramo AC Se sigue el mismo procedimiento que para el tramo AC: integrando la ecuación de la elástica dos veces (Ec. B.114 y B.115) w x (Ec. B.114) (Ec. B.115) 0dx C1 AC wAC ( x) C1dx C1x C2 A partir del las condiciones de contorno, Ec. B.116 y Ec. B.117 se obtiene la ecuación de la elástica. Las condiciones de contorno que se imponen son el valor de las flechas calculados por el segundo teorema de Mohr, en la sección C, Ec. B.105, y en el extremo libre, sección A, Ec. B.106. wAC ( x 0) C1a 11 pb 4 15 pab3 → 120 EI 120 EI 11 pb 4 15 pab3 11 pb 4 120 EI 120 EI 120 EI C2 → 11 pb 4 15 pab3 120 EI 120 EI C1 15 pab3 120 EI (Ec. B.116) (Ec. B.117) Finalmente se obtiene la ecuación de la elástica, Ec. B.118. wAC ( x) 15 pab3 11 pb 4 15 pab3 x 120 EI 120 EI 120 EI → wAC ( x) pb3 15x 4b 15L 120 EI (Ec. B.118) Pág. 34 Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 B.9 Voladizo con carga repartida creciente con p1 y p2 Cálculo de las reacciones Siguiendo el mismo procedimiento que en el apartado B.1 Voladizo con carga puntual en el extremo libre del voladizo, se obtienen las reacciones en el empotramiento: L2 ( p2 2 p1 ) MB 6 RB L ( p1 p 2 ) 2 Diagramas de esfuerzos cortantes y momento flector Tanto el esfuerzo cortante como el momento flector son crecientes en el tramo CB (Ec. B.119 y B.120). ( p p1 ) x 2 TAB ( x) 2 p1 x 2L (Ec. B.119) ( p 2 p1 ) x 3 p1 x 2 M AB ( x) 6 L 2 (Ec. B.120) DEC DMF Ángulos de giro y flecha 1er Teorema de Mohr er Se aplica el 1 Teorema de Mohr para calcular el ángulo de giro del extremo libre, Ec. B.121, ya que el ángulo de giro en B es cero (θB=0) por tratarse de un empotramiento. A0 A B ( p p1 ) x 3 p1 x 2 dx 2 6 LEI 2 EI BL 0 → ( p p1 ) x 4 p1x3 A 2 → 6 EI L 24 LEI Anexos A, B, C, D, E y F A Pág. 35 L3 3 p1 p2 24 EI (Ec. B.121) o 2 Teorema de Mohr o Se aplica el 2 Teorema de Mohr para calcular la flecha en el extremo libre, Ec. B.122. p p1 x3 p1x 2 ( x A x)dx → A 2 6 LEI 2 EI BL A0 p2 p1 x 4 p1 x 3 dx 6 LEI 2 EI BL A0 A 0 ( p p1 ) x 5 p1 x 4 A 2 8EI L 30 LEI → A L4 (11 p1 4 p2 ) 120 EI (Ec. B.122) Ecuación de la elástica Integrando doblemente la ecuación diferencial de la elástica, Ec. B.123 y A.124, se obtiene la ecuación de corrimiento transversal. w x AB ( p p1 ) x 3 p1 x 2 ( p p1 ) x 4 p1 x 3 dx 2 2 C1 2 EI 24 LEI 6 EI 6 LEI (Ec. B.123) ( p p1 ) x 4 p1 x 3 ( p p1 ) x 5 p x4 wAB ( x) 2 C1 dx 2 1 C1 x C2 6 EI 120 LEI 24 EI 24 LEI (Ec. B.124) Las constantes C1 y C2 se han de determinar a partir de las condiciones de contorno. Condiciones de contorno La primera condición de contorno que se impone es el valor de la flecha calculado por el segundo teorema de Mohr, Ec B.122, en el extremo libre, Ec. B.125, obteniendo el valor de C2. wAB ( x 0) L4 (11 p1 4 p2 ) 120 EI → C2 L4 (11 p1 4 p2 ) 120 EI (Ec. B.125) La segunda condición que se impone es el valor de la flecha en el empotramiento es cero, Ec. B.126. wAB ( x L) 0 → ( p2 p1 ) L4 p L4 L5 (11 p1 4 p2 ) 1 C1L 0 120 EI 24 EI 120 EI → Pág. 36 C1 Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 L3 (15 p1 5 p2 ) 120 EI (Ec. B.126) Finalmente se obtiene la ecuación de la elástica, Ec. B.127. wAB ( x) ( p2 p1 ) x 5 5 p1 x 4 L3 (15 p1 5 p2 ) L4 (11 p1 4 p2 ) 120 LEI 120 EI 120 EI 120 EI (Ec. B.127) Anexos A, B, C, D, E y F Pág. 37 B.10 Voladizo con carga repartida creciente y decreciente Cálculo de las reacciones Siguiendo el mismo procedimiento que en el apartado 1.1 Voladizo con carga puntual en el extremo libre del voladizo, se obtienen las reacciones en el empotramiento: MB pL(b L) 6 RB pL 2 Diagramas de esfuerzos cortantes y momento flector Tanto el esfuerzo cortante (Ec. B.128 y A.129) como el momento flector (Ec. B.130 y A.131) son crecientes en ambos tramos del voladizo. TAC px 2 2a (Ec. B.128) TCB ap p ( x a )(b L x) 2 2b (Ec. B.129) M AC ( x) px 3 6a (Ec. B.130) M CB ( x) p ( x a) 2 (2b L x) 2 3 ax 2 a 6 b (Ec. B.131) A continuación se indica el valor del momento y del esfuerzo cortante en la sección C. MC DEC DMF a2 p 6 TC ap 2 Pág. 38 Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 Ángulos de giro y flecha 1er Teorema de Mohr Se aplica el 1er Teorema de Mohr para calcular el ángulo de giro del extremo libre, Ec. B.132, ya que el ángulo de giro en B es cero (θB=0) por tratarse de un empotramiento. C a C B B a b p C 6bEI C p 6 EI ( x a) 2 (2b L x) 2 3 ax 2 a dx b → a x 4 x3 x2 2 2 ( 2 a 2 b L ) ( a 4 ab 2 aL 3 ab ) a Lx 4 → 3 2 a b pb 4a 2b 6ab 2 3b 3 24 EI (Ec. B.132) A partir del valor θC se calcula el giro en el extremo libre del voladizo, Ec. B.133. A0 px 3 A C dx 6aEI C a pb A 4a 2b 6ab 2 3b3 24 EI → A pa 3 pb 4a 2b 6ab 2 3b3 24 EI 24 EI A p a 3 4a 2b 2 6ab 3 3b 4 24 EI 0 p x4 6aEI 4 a → A pL a 2 3bL 24 EI (Ec. B.133) 2o Teorema de Mohr Se aplica el 2o Teorema de Mohr para calcular la flecha en el extremo libre, Ec. B.134. C a C p ( x a) 2 (2b L x) 3ax 2a 2 ( xC x)dx 6 EI b B a b p C 6bEI C → a x5 x 4 x3 x2 2 3 2 3 4 → ( 4 a 3 b ) ( 6 a 6 ab ) ( 4 a 4 a b ) x ( a b a ) 5 4 3 2 a b p 10a 2 b 2 11b 4 20ab 3 120 EI (Ec. B.134) Anexos A, B, C, D, E y F Pág. 39 Para calcular la flecha en A, se aplica la fórmula que relaciona flechas y ángulos de giro, Ec. B.135. A C C x A xC A A 0 M xA x dx EI C a → p b 2 (29a 2 13ab 11L2 ) 4a 4 20a 3b 120 EI (Ec. B.135) Ecuación de la elástica Tramo CB Integrando doblemente la ecuación diferencial de la elástica, Ec. B.136 y A.137, se obtiene la ecuación de corrimiento transversal para el tramo CB. w p ( x a) 2 (2b L x) 3ax 2a 2 dx x CB 6 b w p x CB 6bEI x4 3aa 2b x 2 3 a b x a 3b a 2 x C1 4 2 p wCB ( x) 6bEI wCB ( x) → p 6bEI x4 3aa 2b x 2 3 2 C1 dx a b x a 3 b a x 4 2 (Ec. B.136) → x 5 a b x 4 a 2b ax 3 a 3b a 2 x 2 C1 x C2 20 4 2 2 (Ec. B.137) Condiciones de contorno La primera condición de contorno, Ec. B.138, que se impone es el valor de la flecha en la sección C calculada por el segundo teorema de Mohr, Ec. B.134. wCB ( x a ) p 10a 2b 2 11b 4 20ab 3 120 EI → p p 4a 5 5a 4b C1a C2 10a 2b 2 11b 4 20ab 3 120bEI 120 EI (Ec. B.138) Pág. 40 Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 La segunda condición que se impone es el valor de la flecha en el empotramiento es cero, Ec. B.139. wCB ( x L) 0 → p 10a 4b 10a 3b 2 10a 2b 3 10ab 4 4b 5 4a 5 C1 L C2 0 120bEI (Ec. B.139) Por tratarse de dos ecuaciones con dos incógnitas, se igualan los términos C2 de las ecuaciones A.138 y A.139, obteniendo el valor del término C1 ,Ec. B.140. p 10a 4b 10a 3b 2 10a 2b 3 10ab 4 4b 5 4a 5 C1L 120bEI p 10a 2b 3 11b 5 20ab 4 4a 5 5a 4b C1a → 120 EI C1b C1 p 15b 5 5a 4b 30ab 4 20a 2b 3 10a 3b 2 120bEI p 15b 4 5a 4 30ab 3 20a 2b 2 10a 3b 120bEI → (Ec. B.140) Substituyendo C1 en la primera condición de contorno, Ec. B.138, se obtiene el valor de C2, Ec. B.141. p 10a 2b 3 11b 5 20ab 4 4a 5 5a 4b 15b 4 5a 4 30ab 3 20a 2b 2 10a 3b a 120bEI p (Ec. B.141) C2 a 5 35ab 4 60a 2b 3 11b 5 5a 4b 20a 3b 2 120bEI C2 Finalmente se obtiene la ecuación de la elástica, Ec. B.142. p wCB ( x) 120bEI x 5 5ax 4 5bx 4 10a 2 x 3 p 10abx 3 10a 3 x 2 10a 2bx 2 120bEI p a 5 35ab 4 60a 2 b 3 11b 5 5a 4 b 20a 3b 2 120bEI wCB ( x) p 120bEI x 5 5Lx 4 10aLx 3 2 2 2 2 2 10a Lx 5L a 3b 15b 4 5a 4 30ab 3 20a 2b 2 10a 3b 3 2 2 L a 11b 2ab x → (Ec. B.142) Tramo AC Integrando doblemente la ecuación diferencial de la elástica, Ec. B.143 y B.144, se obtiene la ecuación de corrimiento transversal para el tramo AC. Anexos A, B, C, D, E y F w x AC Pág. 41 px 3 dx 6a w x → AC px 4 C1 24aEI (Ec. B.143) px 4 px 5 C1 x C2 wAC ( x) C1 dx → wAC 120aEI 24aEI (Ec. B.144) Condiciones de contorno La primera condición de contorno, Ec. B.145, que se impone es el valor de la flecha en la sección C calculada por el segundo teorema de Mohr, Ec A.134. wAC ( x a ) p 10a 2b 2 11b 4 20ab 3 120 EI → px 5 p C1 x C2 10a 2b 2 11b 4 20ab3 120aEI 120 EI (Ec. B.145) La segunda condición de contorno, Ec. B.146, que se impone es el valor de la flecha en el extremo libre calculado por el segundo teorema de Mohr, Ec. B.135. w AC ( x 0) C2 p 40a 2b 2 35ab 3 11b 4 4a 4 20a 3b 120 EI p 40a 2b 2 35ab 3 11b 4 4a 4 20a 3b 120 EI → (Ec. B.146) Substituyendo el valor de C2 en la Ec. B.145 se obtiene el valor de C1, Ec. B.147. pa 4 p C1a 120 EI 120 EI C1 40a 2b 2 35ab 3 p 10a 2b 2 11b 4 20ab 3 → 11b 4 4a 4 20a 3b 120 EI p 30ab 2 15b 3 5a 3 20a 2b 120 EI (Ec. B.147) Finalmente se obtiene la ecuación de la elástica, Ec. B.148. 30ab 2 15b 3 x p 5a 3 20a 2b 120 EI 40a 2b 2 35ab 3 11b 4 4a 4 20a 3b → wAC ( x) px 5 p 120aEI 120 EI wAC ( x) p x 5 5aL a 2 3bL x ab 2 29a 2 13ab 11L2 4a 5 20a 4b 120aEI (Ec. B.148) Pág. 42 Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 B.11 Voladizo con momento flector, M, aplicado en una sección C Cálculo de las reacciones Debido a que se aplica únicamente un momento flector, la reacción vertical en el empotramiento es cero, y el momento es igual al momento flector aplicado en sentido inverso: M B M RB 0 Diagramas de esfuerzos cortantes y momento flector Por no aplicarse fuerzas verticales, el esfuerzo cortante es cero (Ec. B.149). El momento flector es constante en el tramo CB, y nulo en el AC, (Ec. B.150 y B.151). TAC x TCB x 0 (Ec. B.149) M AC ( x) 0 (Ec. B.150) M CB ( x) M (Ec. B.151) DMF Ángulos de giro y flecha 1er Teorema de Mohr Se aplica el 1er Teorema de Mohr para calcular el ángulo de giro del extremo libre, Ec. B.152, ya que el ángulo de giro en B es cero (θB=0) por tratarse de un empotramiento. C a C B B a b M dx EI a Mx M a L → Mb → C C EI L EI EI (Ec. B.152) Anexos A, B, C, D, E y F Pág. 43 A partir del valor θC se calcula el giro en el extremo libre del voladizo, Ec. B.153. A C 0 → A C Mb EI (Ec. B.153) 2o Teorema de Mohr Se aplica el 2o Teorema de Mohr para calcular la flecha en el extremo libre, Ec. B.154. C a a M M x2 M 2 C ( xC x)dx a 2aL L2 ax EI EI 2 2 EI L BL C M a 2 2aL L2 2 EI → C Mb 2 2 EI → (Ec. B.154) Para calcular la flecha en A, se aplica la fórmula que relaciona flechas y ángulos de giro, Ec. B.155. A C C x A xC A A0 M xA xc dx EI C a → A Mb 2 L b 2 EI Mb 2 Mb a Mb b 2a 2 EI 2 EI 2 EI (Ec. B.155) Ecuación de la elástica Tramo CB Integrando doblemente la ecuación diferencial de la elástica, Ec. B.156 y B.157, se obtiene la ecuación de corrimiento transversal para el tramo CB. w M dx1 → x CB EI w Mx C1 x CB EI Mx wCB ( x) C1 dx EI → wCB ( x) Mx 2 C1 x C2 2 EI (Ec. B.156) (Ec. B.157) Condiciones de contorno La primera condición de contorno, Ec. B.158, que se impone es el valor de la flecha en la sección C calculada por el segundo teorema de Mohr, Ec A.154. Pág. 44 Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 wCB ( x a) Mb 2 2 EI → Ma 2 Mb 2 C1a C2 2 EI 2 EI (Ec. B.158) La segunda condición que se impone es el valor de la flecha en el empotramiento es cero, Ec. B.159. wCB ( x L) 0 → ML2 C1L C2 0 2 EI (Ec. B.159) Se igualan los términos C2 de las Ec. B.158 y B.159, obteniendo el valor del término C1,, Ec. B.160. ML2 Mb 2 Ma 2 C1L C1a 2 EI 2 EI 2 EI C1 → C1b ML2 Mb 2 Ma 2 2 EI 2 EI 2 EI ML EI → (Ec. B.160) Substituyendo C1 en la primera condición de contorno, Ec. B.159 se obtiene el valor de C2, Ec. B.161. C2 ML2 ML2 ML2 → C2 2 EI 2 EI EI (Ec. B.161) Finalmente se obtiene la ecuación de la elástica (Ec. B.162) wCB ( x) Mx 2 ML ML2 x 2 EI EI 2 EI → wCB ( x) Mb L x 2 2 EI (Ec. B.162) Tramo AC Integrando doblemente la ecuación diferencial de la elástica, Ec. B.163 y B.164, se obtiene la ecuación de corrimiento transversal para el tramo CB. w x (Ec. B.163) (Ec. B.164) 0dx C1 AC wAC ( x) C1dx C1 x C2 Anexos A, B, C, D, E y F Pág. 45 Condiciones de contorno La primera condición de contorno, Ec. B.165, que se impone es el valor de la flecha en la sección C calculada por el segundo teorema de Mohr, Ec B.154. wAC ( x a) Mb 2 2 EI → C1a C2 Mb 2 2 EI (Ec. B.165) La segunda condición que se impone es el valor de la flecha en el extremo libre calculado a partir del segundo teorema de Mohr, Ec. B.166. wAC ( x 0) Mb 2 L b → 2 EI C2 Mb 2 L b 2 EI (Ec. B.166) Substituyendo el Valor de C2 en la Ecuación A.165 se obtiene el valor de C1, Ec. B.167. C1a C1 2 Mb 2L b Mb 2 EI 2 EI → C1 Mb 2 Mb 2L b → 2aEI 2aEI MbL Mb 2 aEI aEI (Ec. B.167) Finalmente se obtiene la ecuación de la elástica, Ec. B.168. wAC ( x) MbL Mb 2 Mb 2L b → wAC ( x) Mb 2 L 2 x b x 2 EI aEI aEI 2 EI (Ec. B.168) Pág. 46 Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 B.12 Voladizo con momento flector, M, en el extremo libre Cálculo de las reacciones Igual que en el caso anterior, Momento aplicado en una sección C, debido a que se aplica únicamente un momento flector, la reacción vertical en el empotramiento es cero, y el momento es igual al momento flector aplicado en sentido inverso: M B M RB 0 Diagramas de esfuerzos cortantes y momento flector Por no aplicarse fuerzas verticales, el esfuerzo cortante es cero (Ec. B.169). El momento flector es constante en toda la viga (Ec. B.170). TAB x 0 (Ec. B.169) M AB ( x) M (Ec. B.170) DMF Ángulos de giro y flecha er 1 Teorema de Mohr Se aplica el 1er Teorema de Mohr para calcular el ángulo de giro del extremo libre, Ec. B.171, ya que el ángulo de giro en B es cero (θB=0) por tratarse de un empotramiento. A 0 A B B a b M dx EI Mx 0 ML → C → C EI L EI (Ec. B.171) Anexos A, B, C, D, E y F Pág. 47 o 2 Teorema de Mohr o Se aplica el 2 Teorema de Mohr para calcular la flecha en el extremo libre, Ec. B.172. A0 C 0 BL M M ( xC x)dx EI EI L → C ML2 2 EI (Ec. B.172) Ecuación de la elástica Integrando doblemente la ecuación diferencial de la elástica, Ec. B.173 y B.174, se obtiene la ecuación de corrimiento transversal. w x AB M dx1 EI Mx wAB ( x) C1 dx EI w x → AB Mx C1 EI → wAB ( x) (Ec. B.173) Mx 2 C1 x C2 2 EI (Ec. B.174) Condiciones de contorno La primera condición de contorno, Ec. B.175, que se impone es el valor de la flecha en el extremo libre calculada por el segundo teorema de Mohr, Ec A.172. wAB ( x 0) ML2 2 EI → C2 ML2 2 EI (Ec. B.175) La segunda condición que se impone es el valor de la flecha en el empotramiento es cero, Ec. B.176. wAB ( x L) 0 → ML2 C1L C2 0 2 EI (Ec. B.176) Substituyendo C2, Ec. B.175 en la segunda condición de contorno, Ec. B.176, se obtiene el valor de C1, Ec. B.177. C1L ML2 ML2 2 EI 2 EI → C1 ML EI (Ec. B.177) Finalmente se obtiene la ecuación de la elástica, Ec. B.178. wAB ( x) Mx 2 ML ML2 x 2 EI EI 2 EI → w AB ( x) M x 2 2 Lx L2 2 EI (Ec. B.178) Pág. 48 Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 C. Análisis de vigas sobre dos apoyos simples En vigas biapoyadas el desplazamiento vertical (flecha) en los extremos es nulo. C.1 Viga biapoyada con carga puntual en una sección de la viga Cálculo de las reacciones A partir de las ecuaciones de la estática sumatorio de fuerzas verticales igual a cero, Ec. C.1, se obtiene el valor de las reacciones, RA y RB. F v 0 → RA Pb L RB Pa L (Ec. C.1) Diagramas de esfuerzos cortantes y momento flector El esfuerzo cortante es constante e igual a Ra, Ec. C.2, hasta llegar a la sección C, a partir de la cual el valor del esfuerzo cortante toma el valor constante de Rb, Ec. C.3. El momento flector aumenta de manera lineal (Ec. C.4) hasta llegar a C, donde toma el valor máximo (Ec. C.5) y a partir de esta sección el momento disminuye también de manera lineal (Ec. C.6) hasta llegar al extremo. TAC ( x ) Pb L (Ec. C.2) TCB ( x ) Pa L (Ec. C.3) M AC ( x ) Pb x L (Ec. C.4) M CB ( x a ) M CB ( x ) Pab L Pa ( L x ) L (Ec. C.5) (Ec. C.6) Anexos A, B, C, D, E y F Pág. 49 DEC DMF Ecuación de la elástica Tramo AC Se integra doblemente la ecuación diferencial de la elástica, Ec. C.7 y C.8. w Pbx w Pbx 2 dx → C1 x AC 2 LEI x AC LEI (Ec. C.7) Pbx 2 wAC ( x) C1 dx 2 LEI (Ec. C.8) → wAC ( x) Pbx 3 C1x C2 6 LEI Tramo CB Se integra doblemente la ecuación diferencial de la elástica, Ec. C.9 y C.10. w Pa( L x) dx → x CB L w Pax 2 Pax C3 x CB 2 LEI EI Pax 2 Pax Pax3 Pax 2 C3 x C4 wCB ( x) C3 dx → wCB ( x) EI 6 LEI 2 EI 2 LEI (Ec. C.9) (Ec. C.10) Condiciones de contorno Se impone que en los extremos, secciones A y B, el valor de la flecha es nulo, Ec. C.11 y Ec. C.12. wAC ( x 0) 0 → C2 0 wCB ( x L) 0 → PaL2 PaL2 2 PaL2 C3 L C4 0 → C3 L C4 6 EI 6 EI 2 EI (Ec. C.11) (Ec. C.12) Pág. 50 Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 La segunda condición que se impone es que el ángulo de giro y la flecha en la sección C han de ser iguales tanto para la ecuación de la elástica en el tramo AC y CB, Ec. C.13 y C.14. w x x a w x a x AC C3 C1 → CB Pbx 2 Pax 2 Pax C1 C3 → 2 LEI 2 LEI EI Pa 2 2 EI (Ec. C.13) wAC ( x a) wCB ( x a) → Pba3 Pa 4 Pa3 C1a C2 C3a C4 6 LEI 6 LEI 2 EI (Ec. C.14) Substituyendo las ecuaciones, Ec. C.11 y Ec. C.13, en la Ec. C.14, se obtiene el valor de C4, Ec. C.15. Pa3 Pa 4 Pa 4 Pa3 aC3 C1 C4 6 EI 6 LEI 6 LEI 2 EI → C4 Pa 3 6 EI (Ec. C.15) Substituyendo el valor de C4 en la Ec. C.12 se obtiene el valor de C3, Ec. C.16. C3 L Pa3 2 PaL2 6 EI 6 EI → C3 PaL Pa3 3EI 6 LEI (Ec. C.16) Substituyendo el valor de C4, Ec. C.14, en la Ec. C.13 se obtiene el valor de C1, Ec. C.17. 2 PaL Pa3 Pa 2 C1 6 EI 6 LEI 2 EI → C1 2 PaL Pa 3 Pa 2 6 EI 6 LEI 2 EI (Ec. C.17) Substituyendo el valor de las constantes en las Ec. C.8 y C.10 se obtienen las ecuaciones de corrimiento transversal para los tramos AC y CB, Ec. C.18 y Ec. C.19. wAC ( x) Pbx 3 2 PaL Pa 3 Pa 2 x 6 LEI 6 EI 6 LEI 2 EI → wAC ( x) wCB ( x) Pax3 Pax 2 2 PaL Pa3 Pa3 x 6 LEI 2 EI 6 EI 6 LEI 6 EI wCB ( x) PLaL x a 2 L x 1 2 6 EI L L 2 PLbx b 2 x 2 1 6 EI L2 L2 (Ec. C.18) → (Ec. C.19) A continuación se indican las ecuaciones de las derivadas de la ecuación de la elástica en los tramos AB y CB, Ec. C.20 y Ec. C.21. Se obtiene substituyendo el valor de las constantes en las Ec. C.7 y Ec. C.9. Anexos A, B, C, D, E y F Pág. 51 w Pbx 2 2 PaL Pa3 Pa 2 x AC 2 LEI 6 EI 6 LEI 2 EI (Ec. C.20) w Pax 2 Pax PaL Pa3 x CB 2 LEI EI 3EI 6 LEI (Ec. C.21) Ángulos de giro y flecha Para encontrar el ángulo de giro de cualquiera de las secciones es suficiente con sustituir en la derivada de la ecuación de la elástica, Ec. C.10 y Ec. C.21. A continuación se indican los valores de los ángulos de giro en los extremos, Ec. C.22 y C.23, y de la sección C, sección donde está aplicada la carga, Ec. C.24. A 3 2 w x 0 PaL Pa Pa x AC 3EI 6 LEI 2 EI B 3 w x L PaL PaL PaL Pa x CB 2 EI EI 3EI 6 LEI C 2 3 2 w x a Pba 2PaL Pa Pa x AC 2 LEI 6 EI 6 LEI 2 EI → A Pab L b 6 LEI → B Pab L a 6 LEI C → Pab b a 3LEI (Ec. C.22) (Ec. C.23) (Ec. C.24) Para obtener el valor de la flecha máxima, se ha de integrar la ecuación de la elástica en el tramo AC, Ec. C.18, que es justamente la Ec. C.20, obteniendo de esta manera la sección donde la flecha es máxima, Ec. C.25. L b 2 Pbx 2 2 PaL Pa3 Pa 2 0 → x 2 LEI 6 EI 6 LEI 2 EI 2 (Ec. C.25) 3 Una vez conocida la sección se substituye este valor en la ecuación de la elástica, Ec. C.18 y se obtiene el valor máximo de flecha, Ec. C.26. wAC x wmáx L 2 b 2 PLb 3 6 EI Pb L2 b 2 9 3LEI 3 2 L 2 b2 3 1 b L 2 2 L b2 3L2 2 → (Ec. C.26) Pág. 52 Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 C.2 Viga biapoyada con carga puntual en el medio de la viga Cálculo de las reacciones Este tipo de carga es un caso particular del voladizo con carga puntual en una sección de la viga. En el que las distancias a y b son iguales a la mitad de la distancia de la viga. Para obtener el valor de las reacciones RA y RB, se sigue el mismo procedimiento que en el apartado C.1 Viga biapoyada con carga puntual en una sección de la viga: R A RB P 2 Diagramas de esfuerzos cortantes y momento flector El esfuerzo cortante (Ec. C.27) y el momento flector (Ec. C.28, Ec. C.29 y Ec. C.30) se comportan de la misma manera que en el apartado C.1 Viga biapoyada con carga puntual en una sección de la viga, por tratarse de un caso concreto de este tipo de viga. TAC ( x ) TCB ( x ) P L P x L P( L x) M CB ( x ) L M AC ( x) PL M máx ( x a L ) 2 4 (Ec. C.27) (Ec. C.28) (Ec. C.29) (Ec. C.30) DEC DMF Ángulos de giro y flecha 1er Teorema de Mohr Se aplica el 1er Teorema de Mohr para calcular el ángulo de giro en las secciones C. Por simetría geométrica y de cargas, θA= -θC, Ec. C.31. Anexos A, B, C, D, E y F Pág. 53 A0 Px P A C dx EI 2 EI C a 0 x2 P 2 EI 2 L 2 L2 8 → A C PL2 16 EI (Ec. C.31) o 2 Teorema de Mohr Se aplica este teorema para hallar la flecha en C (Ec. C.32). Por las características de esta estructura es en esta sección, x=L/2, donde es máxima. A 0 A 0 Px3 Px Px 2 3 C ( x A x)dx dx → PL C 2 EI 2 EI 6 EI L / 2 BL / 2 BL / 2 48EI 0 (Ec. C.32) Ecuación de la elástica Tramo AC Debido a la simetría de la estructura se estudia únicamente el tramo AB, el tramo CB es igual. Se integra doblemente la ecuación diferencial de la elástica, Ec. C.33 y Ec. C.34. w x AC Px dx → 2 EI w Px 2 C1 x AC 4 EI (Ec. C.33) Px 2 Px3 C1x C2 wAC ( x) C1 dx → wAC ( x) 12 EI 4 EI (Ec. C.34) Condiciones de contorno Se impone que en el extremo, sección A, el valor de la flecha es nulo, Ec. C.35. wAC ( x 0) 0 → C2 0 (Ec. C.35) Se impone el valor de la flecha, Ec. C.32, en la sección C, Ec. C.36. PL3 wAC ( x L ) 2 48EI → 2 C L PL 12 EI 3 1 2 PL3 48EI → C1 PL2 16 EI (Ec. C.36) Substituyendo el valor de las constantes en las Ec. C.33 y C.34 se obtienen las ecuaciones de corrimiento transversal y de la derivada de la elástica, Ec. C.37 y Ec. C.38, para el tramo AC. wAC ( x) Px3 PL2 x 12 EI 16 EI w Px 2 PL2 x AC 4 EI 16 EI → wAC ( x) PL2 x 4 x 2 1 16 EI 3L2 (Ec. C.37) (Ec. C.38) Pág. 54 Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 C.3 Viga biapoyada con dos cargas puntuales Cálculo de las reacciones Siguiendo el mismo procedimiento que en el apartado C.1 Viga biapoyada con carga puntual en una sección de la viga y por simetría de la estructura, se obtienen las reacciones RA y RB: RA RB P Diagramas de esfuerzos cortantes y momento flector El esfuerzo cortante es constante e igual a P (Ec. C.39) de la sección A hasta llegar a la sección C, donde pasa a ser nulo. En el tramo DB toma un valor constante e igual a -P (Ec. C.39). El momento flector aumenta de manera lineal (Ec. C.40) de la sección A hasta llegar a C, donde toma el valor máximo y se mantiene constante en todo el tramo CD (Ec. C.41). A partir de esta sección D el momento disminuye de manera lineal (Ec. C.42) hasta llegar a la sección B. TAC ( x) TDB ( x) P (Ec. C.39) M AC ( x) Px (Ec. C.40) M CB ( x) P( L x) (Ec. C.41) M CD M máx Pa (Ec. C.42) DEC DMF Anexos A, B, C, D, E y F Pág. 55 Ecuación de la elástica Tramo AC Se integra doblemente la ecuación diferencial de la elástica, Ec. C.43 y C.44. w x AC Px w dx → EI x AC Px 2 C1 2 EI (Ec. C.43) Px 2 Px 3 C1 x C 2 w AC ( x) C1 dx → w AC ( x) 6 EI 2 EI (Ec. C.44) Tramo CD Se integra doblemente la ecuación diferencial de la elástica, Ec. C.45 y Ec. C.46. w Pa w Pax dx → C3 x CD EI x CD EI (Ec. C.45) Pax wCD ( x) C 3 dx → EI (Ec. C.46) wCD ( x) Pax 2 C3 x C 4 2 EI Condiciones de contorno Se impone que en la sección A el valor de la flecha es nulo, Ec. C.47. wAC ( x 0) 0 → C 2 0 (Ec. C.47) Debido a la simetría de la estructura, en el centro de la viga el desplazamiento es máximo, por tanto la derivada de ecuación de la elástica, Ec. C.46, ha de ser cero, Ec. C.48. w ( x L / 2) 0 x CD → PaL PaL C3 0 → C3 2 EI 2 EI (Ec. C.48) El ángulo de giro de la sección C ha de ser el mismo calculado por el tramo AC que por el tramo CD, Ec. C.49. w x ( x a) AC w Pa 2 Pa 2 ( x a) → C1 C3 x CD 2 EI EI (Ec. C.49) Pág. 56 Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 Substituyendo el valor de C3 en la Ec. C.49, se obtiene el valor de la constante C1, Ec. C.50. Pa 2 Pa 2 PaL C1 2 EI EI 2 EI → C1 Pa L a 2 EI (Ec. C.50) La flecha en la sección C ha de ser la misma calculado por el tramo AC y por el CD, Ec. C.51. wAC ( x a) wCD ( x a) → Pa 3 Pa 3 C1a C2 C3 a C 4 6 EI 2 EI (Ec. C.51) Substituyendo el valor de las constantes C1, C2 y C3 se obtiene el valor de la constante C4, Ec. C.52. Pa3 Pa 2 ( L a) Pa 3 Pa 2 L Pa 3 C4 → C4 6 EI 6 EI 2 EI 2 EI 2 EI (Ec. C.52) Substituyendo el valor de las constantes C1 y C2 en las Ec. C.45, Ec. C.46 se obtienen las ecuaciones de corrimiento transversal y de la derivada de la elástica, Ec. C.53 y Ec. C.54, para el tramo AC. Substituyendo C3 y C4 en las Ec. C.47 y Ec. C.48 se obtienen las Ec. C.55 y Ec. C.56. wAC ( x) w x AC wCD ( x) Px 3 PaL a x 6 EI 2 EI → w AC ( x) Px 3aL 3a 2 x 2 6 EI Px 2 PaL a 2 EI 2 EI (Ec. C.53) (Ec. C.54) Pa Pax 2 PaL Pa 3 → wCD ( x) 3Lx 3 x 2 a 2 x 6 EI 2 EI 2 EI 6 EI w Pax PaL x CD EI 2 EI (Ec. C.55) (Ec. C.56) Ángulos de giro y flecha El ángulo de giro en la sección A y C, Ec. C.57 y Ec. C.58, se obtienen a partir de las ecuaciones de derivada de la elástica, Ec. C.43 y Ec. C.44. Por simetría: θA = -θB y θC = -θD. Anexos A, B, C, D, E y F A C w x w x Pág. 57 Pa L a 2 EI x 0 → A B x a → C D AC AC (Ec. C.57) Pa 2 PaL a PaL 2a 2 EI 2 EI 2 EI (Ec. C.58) Debido a la simetría de la estructura y de las cargas aplicadas, la flecha máxima se da en la sección central, Ec. C.59. Pa wmáx wCD ( x L ) 2 6 EI 3L2 3L2 2 → 2 4 a wmáx Pa 3L2 4a 2 24 EI (Ec. C.59) Pág. 58 Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 C.4 Viga biapoyada con carga repartida Cálculo de las reacciones Siguiendo el mismo procedimiento que en el apartado C.1 Viga biapoyada con carga puntual en una sección de la viga, se obtienen las reacciones RA y RB: R A RB pL 2 Diagramas de esfuerzos cortantes y momento flector En la sección A el esfuerzo cortante toma como valor PL/2 y disminuye de manera lineal (Ec. C.60) hasta alcanzar el valor PL/2 en la sección B. El cortante es nulo en la sección central de la viga, para la distancia L/2. El momento flector aumenta de forma cuadrática (Ec. C.61) tomando su valor máximo en la sección central de la viga (Ec. C.62). L T ( x) p x 2 M ( x) px L x 2 M máx M x L / 2 DEC DMF (Ec. C.60) (Ec. C.61) pL2 6 (Ec. C.62) Anexos A, B, C, D, E y F Pág. 59 Ecuación de la elástica Se integra doblemente la ecuación diferencial de la elástica, Ec. C.63 y Ec. C.64. w x AB px L x dx → 2 EI w x px 3 pLx 2 w AB ( x) C1 dx 4 EI 6 EI AB → px 3 pLx 2 C1 6 EI 4 EI w AB ( x) (Ec. C.63) px 4 pLx 3 C1 x C 2 24 EI 12 EI (Ec. C.64) Condiciones de contorno Se impone que en la sección A, Ec. C.65, y en la sección B, Ec. C.66, el valor de la flecha es nulo. w AB ( x 0) 0 → C 2 0 wAB ( x L) 0 → (Ec. C.65) pL4 pL4 C1 L 0 24 EI 12 EI → C1 pL3 24 EI (Ec. C.66) A partir de los valores de las constantes C1 y C2 se obtiene la ecuación de la elástica, Ec. C.67, y la de su derivada, Ec. C.68. w AB ( x) w x AB px 4 pLx 3 pL3 x 24 EI 12 EI 24 EI 2 → w AB ( x) px x 3 2 Lx 2 L3 24 EI px 3 pLx 2 6 EI 4 EI (Ec. C.67) (Ec. C.68) Ángulos de giro y flecha El ángulo de giro en la sección A y B, Ec. C.69, se obtienen a partir de la ecuación de derivada de la elástica, Ec. C.67. Por simetría: θA = -θB. A B w x x 0 → A B AB pL3 6 EI (Ec. C.69) Debido a la simetría de la estructura y de las cargas aplicadas, la flecha máxima se da en la sección central, Ec. C.70. pL máx w AB ( x L ) 2 48EI L3 L3 3 L 8 2 → máx 5 pL4 384 EI (Ec. C.70) Pág. 60 Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 C.5 Viga biapoyada con carga repartida en el lado de uno de los apoyos Cálculo de las reacciones Siguiendo el mismo procedimiento que en el apartado C.1 Viga biapoyada con carga puntual en una sección de la viga, se obtienen las reacciones RA y RB: RA pa b a 2 L RB pa 2 2L Diagramas de esfuerzos cortantes y momento flector En la sección A el esfuerzo cortante toma como valor RA y disminuye de manera lineal (Ec. C.71) pasando por valor nulo en una sección del tramo AC hasta alcanzar el valor RB en la sección C, el cual se mantiene constante en el tramo CB (Ec. C.72). El momento flector aumenta (Ec. C.73) tomando su valor máximo en el tramo AC (Ec. C.74). En el tramo CB el momento disminuye de manera lineal (Ec. C.75). T AC ( x) pa b a L 2 px (Ec. C.71) TCB ( x) pa 2 2L (Ec. C.72) M AC ( x) pa a px 2 b x L 2 2 (Ec. C.73) a pa 2 a M máx M AC x a1 1 2 2L 2L M CB x DEC DMF pa 2 L x 2L (Ec. C.74) (Ec. C.75) Anexos A, B, C, D, E y F Pág. 61 Ecuación de la elástica Tramo AC Se integra doblemente la ecuación diferencial de la elástica, Ec. C.76 y C.77. w x AC pa a px 2 w b x dx → LEI 2 2 EI x AC pax 2 2 LEI a px 3 b C1 2 6 EI (Ec. C.76) pax 2 a px 3 w AC ( x) C1 dx → b 2 6 EI 2L w AC ( x) pax 3 a px 4 C1 x C 2 b 6 LEI 2 24 EI (Ec. C.77) Tramo CB Se integra doblemente la ecuación diferencial de la elástica, Ec. C.78 y C.79. w pa 2 L x dx → x CB 2 LEI w pa 2 x pa 2 x 2 C3 x CB 2 EI 4 LEI pa 2 x pa 2 x 2 wCB ( x) C3 dx 4 LEI 3EI → wCB ( x) (Ec. C.78) pa 2 x 2 pa 2 x 3 C3 x C 4 4 EI 12 LEI (Ec. C.79) Condiciones de contorno Se impone que en la sección A, Ec. C.80, y C, Ec. C.81, el valor de la flecha es nulo. wAC ( x 0) 0 → C2 0 wCB ( x L) 0 → (Ec. C.80) pa 2 L2 pa 2 L2 C3 L C 4 0 4 EI 12 EI (Ec. C.81) El ángulo de giro de la sección C ha de ser el mismo calculado por el tramo AC que por el tramo CB, Ec. C.82. w x ( x a) AC C3 C1 pa 4 a pa 3 pa 3 pa 4 w C1 C3 → ( x a) → b 6 LEI 2 24 EI 2 EI 4 LEI x CB pa 3b pa 4 pa 3 3 pa 3 pa 4 2 LEI 4 LEI 6 EI 6 EI 4 LEI → C3 C1 pa 3 6 EI (Ec. C.82) Pág. 62 Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 La flecha en la sección C ha de ser la misma calculado por el tramo AC y por el CB, Ec. C.83. wAC ( x a) wCB ( x a) → pa 4 a pa 4 pa 4 pa 5 C1a C3 a C 4 → b 6 LEI 2 24 EI 4 EI 12 LEI b pa 5 7 pa 4 C4 6 LEI 6 LEI 24 EI C3 C1 a pa 4 (Ec. C.83) Substituyendo la Ec. C.82 en la Ec. C.83 se obtiene el valor de C4, Ec. C.84. C4 pa 4 b pa 5 7 pa 4 pa 4 6 LEI 6 LEI 24 EI 6 EI C4 → pa 4 24 EI (Ec. C.84) Substituyendo la constante C4 en la Ec. C.81, se obtiene el valor de C3, Ec. C.85. pa 2 L2 pa 2 L2 pa 4 C3 L 0 4 EI 12 EI 24 EI C3 → pa 2 L pa 4 6 EI 24 LEI (Ec. C.85) Substituyendo la constante C3 en la Ec. C.82, se obtiene el valor de C1, Ec. C.86. pa 2 L pa 4 pa 3 C1 6 EI 24 LEI 6 EI → C1 pa 2 L pa 4 pa 3 6 EI 24 LEI 6 EI (Ec. C.86) A partir de los valores de las constantes se obtienen las ecuaciones de corrimiento transversal y de la derivada de la elástica, Ec. C.87, Ec. C.88, para el tramo AC, y ,Ec. C.89 y Ec. C.90, para el tramo CB. Tramo AC w AC ( x) w AC ( x) w x pax 3 a px 4 pa 2 L pa 4 pa 3 x → b 6 LEI 2 24 EI 6 EI 24 LEI 6 EI 3 a 2 2 2 Lx 4a b 2 x a L b (Ec. C.87) pax 2 a px 3 pa 2 L pa 4 pa 3 b 2 LEI 2 6 EI 6 EI 24 LEI 6 EI (Ec. C.88) px 24 LEI AC Tramo CB wCB ( x) pa 2 x 2 pa 2 x 3 pa 2 L pa 4 pa 4 x 4 EI 12 LEI 6 EI 24 LEI 24 EI wCB ( x) pL x a 2 12 LEI a2 2 2 L x L 1 2 2L → (Ec. C.89) Anexos A, B, C, D, E y F Pág. 63 w pa 2 x pa 2 x 2 pa 2 L pa 4 x CB 2 EI 4 LEI 6 EI 24 LEI (Ec. C.90) Ángulos de giro y flecha A continuación se indican los valores de los ángulos de giro en los extremos, Ec. C.91 y C.92. A B w x x 0 AC pa 2 L pa 4 pa 3 6 EI 24 LEI 6 EI → A 2 2 2 4 w x L pa L pa L pa L pa x CB 2 EI 4 EI 6 EI 24 LEI B Pa 2 L a2 1 2 12 EI 2 L Pa 2 L b2 24 LEI (Ec. C.91) → (Ec. C.92) Para obtener el valor de la flecha máxima, primero se ha de conocer la sección donde la flecha es máxima, Ec. C.93, para ello se ha de igualar a cero la ecuación de la derivada de la elástica, Ec. C.90, obteniendo de esta manera la sección donde la flecha es máxima, Ec. C.94. pa 2 x pa 2 x 2 pa 2 L pa 4 L2 a 2 0 → x L 3 6 2 EI 4 LEI 6 EI 24 LEI (Ec. C.93) Substituyendo este valor en la ecuación de la elástica, Ec. C.89, se obtiene el valor máximo de flecha, Ec. C.94. 2 pL x a 2 L2 a 2 a2 wCB ( x) L L L2 1 2 12 LEI 3 6 2L máx pa 2 2 L2 a 2 216 LEI 62L 2 a2 → (Ec. C.94) Pág. 64 Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 C.6 Viga biapoyada con carga repartida en una zona Cálculo de las reacciones Siguiendo el mismo procedimiento que en el apartado C.1 Viga biapoyada con carga puntual en una sección de la viga, se obtienen las reacciones RA y RB: RA pbc L RB pac L Diagramas de esfuerzos cortantes y momento flector En el tramo AC el esfuerzo cortante toma como valor RA (Ec. C.95) y disminuye de manera lineal (Ec. C.96) pasando por valor nulo en una sección del tramo CD hasta alcanzar el valor RB en la sección D, el cual se mantiene constante en el tramo CB (Ec. C.97). El momento flector aumenta de manera lineal (Ec. C.98) tomando su valor máximo (Ec. C.99) en el tramo CD (Ec. C.100). En el tramo DB el momento disminuye de manera lineal (Ec. C.101). T AC ( x ) pbc L (Ec. C.95) TCD ( x) pbc c p x a L 2 (Ec. C.96) TDB ( x ) pac L (Ec. C.97) M AC ( x) pbcx L (Ec. C.98) c bc pbc bc M máx M AC x a 2a c 2 L 2L L M CD x pbcx p c xa L 2 2 M DB x pac L x L (Ec. C.99) 2 (Ec. C.100) (Ec. C.101) Anexos A, B, C, D, E y F Pág. 65 DEC DMF Ecuación de la elástica Tramo AC Se integra doblemente la ecuación diferencial de la elástica, Ec. C.102 y C.103. w x AC pbcx dx LEI → pbcx 2 w AC ( x) C1 dx 2 LEI → w x AC w AC ( x) pbcx 2 C1 2 LEI (Ec. C.102) pbcx 3 C1 x C 2 6 LEI (Ec. C.103) Tramo CD Se integra doblemente la ecuación diferencial de la elástica, Ec. C.104 y C.105. w x CD 2 pbcx p c x a dx → 2 LEI 2 EI w pbcx 2 px 3 pc 2a x 2 px 2 c 2 a ac C3 x CD 2 LEI 6 EI 4 EI 2 EI 4 wCD ( x) pbcx 2 2LEI wCD ( x) px 3 pc 2a x 2 px 6 EI 4 EI 2 EI pbcx 3 px 3 6 LEI 2 EI (Ec. C.104) 2 c2 a C3 dx → ac 4 x 4 c 2a x 3 x 2 2 c2 a ac 6 2 4 12 C3 x C 4 (Ec. C.105) Pág. 66 Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 Tramo DB Se integra doblemente la ecuación diferencial de la elástica, Ec. C.106 y C.107. w pac L x dx → x DB LEI w pacx pacx 2 C5 x DB EI 2 LEI pacx pacx 2 wDB ( x) C5 dx 2 LEI EI → wDB ( x) pacx 2 pacx 3 C5 x C 6 2 EI 6 LEI (Ec. C.106) (Ec. C.107) Condiciones de contorno Se impone que en la sección A, Ec. C.108, y C, Ec. C.109, el valor de la flecha es nulo. wAC ( x 0) 0 → C2 0 wDB ( x L) 0 → (Ec. C.108) pacL2 C5 L C 6 0 3EI (Ec. C.109) Tanto el ángulo de giro, Ec. C.110, como la flecha, Ec. C.111, en la sección C han de tener el mismo valor calculado por el tramo AC que por el tramo CD. w x w (x a c ) (x a c ) → 2 2 x AC DB C1 pac 2 3 6 EI C3 C1 pc 2a a c 4 EI 2 2 pac 2 2 a 2 c ac C → 3 2 EI 4 p 3 c3 4a 6a 2 c 3ac 2 24 EI 2 (Ec. C.110) w AC ( x a c ) wCD ( x a c ) → 2 2 C1 x pac a c 2 3 2 2 EI 4 C3 C1 a c 2 12 c 2a a c 2 3 6 a c 2 2 2 2 c2 a ac C 3 x C 4 → 4 p 4 9a 2 c 2 4ac 3 3c 4 3a 6a 3 c C4 24 EI 2 2 16 (Ec. C.111) Anexos A, B, C, D, E y F Pág. 67 Substituyendo la Ec. C.110 en la Ec. C.111 se obtiene el valor de C4, Ec. C.112. p 3 c3 c p 4 9a 2 c 2 4ac 3 3c 4 4a 6a 2 c 3ac 2 a 3a 6a 3 c C4 24 EI 2 2 24 EI 2 2 16 p 4 3a 2 c 2 ac 3 c 4 a 2a 3 c (Ec. C.112) C4 24 EI 2 2 16 Igual que en la sección C, tanto el ángulo de giro, Ec. C.113, como la flecha, Ec. C.114 en la sección D han de tener el mismo valor calculado por el tramo CD que por el tramo DB. w w (x a c ) (x a c ) 2 2 x CD x DB pbc a c pac a c EI pac 2 LEI 2 2 6 EI 2 2 4 EI pac 2 2 a 2 c ac C 3 2 EI 4 2 2 LEI C5 C3 pc 2a a c 3 2 paca c 2 2 → p 24 EI C5 → 3 c3 4a 6a 2 c 3ac 2 2 (Ec. C.113) wCD ( x a c ) wDB ( x a c ) → 2 2 pbc a c 6 LEI C3 a c 2 pa c 2 a c 2 2 3 C 4 8 EI 4 2 EI C5 C3 a p ac 3 pac a c 12 2 2 2 EI c 2a a c 2 3 3 2 C a c C 2 6 LEI → pbc a c pac c 2 2 2 6 LEI 8 EI 2 6 a c a 3 2 2 2 c2 ac 4 2 c 2 ac 4 3 5 2 2 6 pac a c a c 2 a 6 a c 3 4 2c 2a a 2 pac a c 2 2 EI c 2 3 2 C6 C4 (Ec. C.114) Pág. 68 Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 Substituyendo la Ec. C.113 y el valor de C4, Ec. C.112, en la Ec. C.114, se obtiene el valor de C6, Ec. C.115. 3 2 2 pbc a c p 4 c4 3 2 p 3a 4 2a 3c 3a c 4a 8a 3c 6a 2c 2 2 ac 24 EI 4 6 LEI 24 EI 2 c p 3ac 3 11c 4 pac a 2 24 EI 2 16 2 EI C6 p 4a 4 c ac 3 24 EI 2 C6 p 4 3a 2 c 2 ac 3 c 4 a 2a 3 c 24 EI 2 2 16 → (Ec. C.115) El valor de C5 se obtiene substituyendo el valor de C6 en la Ec. C.116. pacL2 p C5 L 4a 4c ac3 0 3EI 24 EI → C5 pacL p 4a 3c ac 3 3EI 24 LEI (Ec. C.116) El valor de C3, Ec. C.117, se obtiene substituyendo el valor de C5 en la Ec. C.113. C3 p 4a 3 c ac 3 p c3 4a 3 6a 2 c 3ac 2 8acL 24 EI 2 24 LEI (Ec. C.117) El valor de C1, Ec. C.118, se obtiene substituyendo el valor de C3 en la Ec. C.110. C1 p p 4a 3 c ac 3 pabc c2 L b 124a 2 c c 3 8acL 24 EI 24 LEI 6 LEI 4a (Ec. C.118) A partir de los valores de las constantes se obtienen las ecuaciones de corrimiento transversal y de la derivada de la elástica, Ec. C.119 y Ec. C.120, para el tramo AC, y, Ec. C.121 y Ec. C.122, para el tramo CD y ,Ec. C.123 y Ec. C.124, para el tramo DB. wAC ( x) pbcx 3 p p 4a 3 c ac 3 124a 2 c c 3 8acL x → 6 LEI 24 EI 24 LEI w AC ( x) pbcx 6 LEI w x 2 c 2 x a L b 4 a x pbcx AC 2 2 LEI pabc c2 L b 6 LEI 4a (Ec. C.119) (Ec. C.120) Anexos A, B, C, D, E y F wCD ( x) Pág. 69 pbcx 3 px 3 6 LEI 2 EI x 4 c 2a x 3 x 2 2 c2 a ac 6 2 4 12 p p 4a 3 c ac 3 p 3ac 2 8acL x 24 EI 24 LEI 24 EI wCD ( x) p 24 EI c3 4a 3 6a 2 c 2 4 3a 2 c 2 ac 3 c 4 a 2a 3 c → 2 2 16 4 pbcx 3 c c2 x L x a 4bcx 3 4abc L b 24 LEI 2 4a (Ec. C.121) w pbcx 2 px 3 pc 2a x 2 px 2 c 2 p c3 a 4a 3 → ac 24 EI x CD 2 LEI 6 EI 4 EI 2 EI 4 2 p p 4a 3 c ac 3 6a 2 c 3ac 2 8acL 24 EI 24 LEI wDB ( x) wDB ( x) (Ec. C.122) pacx 2 pacx 3 pacL p 4a 3 c ac 3 p x 4a 4 c ac 3 2 EI 6 LEI 3EI 24 LEI 24 EI pacL x c 2 2 L x b L a 6 LEI 4b w pacx pacx 2 pacL p 4a 3 c ac 3 x DB EI 2 LEI 3EI 24 LEI → (Ec. C.123) (Ec. C.124) Ángulos de giro A continuación se indican los valores de los ángulos de giro en los extremos, Ec. C.125 y C.126. A B w x x 0 C1 → AC A pabc c2 L b 6 LEI 4a 3 3 w x L pacL pacL pacL p 4a c ac x CB EI 2 EI 3EI 24 LEI B pabc c2 L a 6 LEI 4b (Ec. C.125) → (Ec. C.126) Pág. 70 Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 C.7 Viga biapoyada con carga triangular repartida Cálculo de las reacciones Siguiendo el mismo procedimiento que en el apartado C.1 Viga biapoyada con carga puntual en una sección de la viga, se obtienen las reacciones RA y RB: RA pL 6 RB pL 3 Diagramas de esfuerzos cortantes y momento flector En la sección A el esfuerzo cortante toma como valor RA y en el tramo AB disminuye (Ec. C.127) pasando por valor nulo en una sección del tramo hasta alcanzar el valor RB en la sección B. En la sección A el momento flector es nulo, en el tramo AB aumenta (Ec. C.128) tomando su valor máximo en una de las secciones a partir de la cual disminuye hasta llegar al extremo D donde vuelve a ser nulo. TAB ( x) pL 3x 2 1 2 6 L M AB ( x) DEC DMF pLx x 2 1 6 L2 (Ec. C.127) (Ec. C.128) Anexos A, B, C, D, E y F Pág. 71 Ecuación de la elástica Se integra doblemente la ecuación diferencial de la elástica, Ec. C.129 y C.130. w x AB pLx x 2 1 dx 6 EI L2 → w x pLx 2 px 4 w AB ( x) C1 dx 12 EI 24 LEI AB pLx 2 px 4 C1 12 EI 24 LEI → wAB ( x) pLx 3 px 5 C1 x C2 36 EI 120 LEI (Ec. C.129) (Ec. C.130) Condiciones de contorno Se impone que en la sección A, Ec. C.131, y C, Ec. C.132, el valor de la flecha es nulo. w AB ( x 0) 0 → C2 0 w AB ( x L) 0 → (Ec. C.131) pL4 pL4 7 pL3 C1 L 0 → C1 36 EI 120 EI 360 EI (Ec. C.132) Substituyendo los valores de las constantes C1 y C2, Ec. C.132 y C.131, se obtienen las ecuaciones de corrimiento transversal y de la derivada de la elástica, Ec. C.133 y C.134. wAB ( x) pLx 3 px5 7 pL3 x 36 EI 120 LEI 360 EI w x pLx 2 px 4 7 pL3 12 EI 24 LEI 360 EI AB → w AB ( x) pL3 x 360 EI 10 x 2 3x 4 7 2 4 L L (Ec. C.133) (Ec. C.134) Ángulos de giro y flecha máxima A continuación se indican los valores de los ángulos de giro en los extremos, Ec. C.135 y C.136. A B w x w x x 0 C1 AB x L AB → A 7 pL3 360 EI pL3 pL4 7 pL3 12 EI 24lEI 360 EI (Ec. C.135) → B pL3 45EI (Ec. C.136) Pág. 72 Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 Para obtener el valor de la flecha máxima, se iguala a cero la ecuación de la derivada de la elástica, Ec. C.134, para obtener la sección donde la flecha es máxima, Ec. C.137. w x AB 15 x 4 7 L3 0 → L pLx 2 px 4 7 pL3 0 12 EI 24 LEI 360 EI → 30 Lx 2 y x2; y2 x4 → 30 Ly 15 y 2 7 L3 0 → L Deshaciendo el cambio de variable: x 0,5193L Cambio de variable: y 0,2697 L2 (Ec. C.137) Substituyendo este valor en la ecuación de la elástica, Ec. C.133, se obtiene el valor máximo de flecha, Ec. C.138. máx wAB (0,5193L ) máx 0,00652 pL4 EI pL0,5193L p0,5193L 7 pL3 0,5193L → 36 EI 120 LEI 360 EI 3 5 (Ec. C.138) Anexos A, B, C, D, E y F Pág. 73 C.8 Viga biapoyada con carga triangular sentido decreciente en un extremo Cálculo de las reacciones Siguiendo el mismo procedimiento que en el apartado C.1 Viga biapoyada con carga puntual en una sección de la viga, se obtienen las reacciones RA y RB: RA pa 3L a 6L RB pa 2 6L Diagramas de esfuerzos cortantes y momento flector En la sección A el esfuerzo cortante toma como valor RA y en el tramo AC disminuye (Ec. C.139) pasando por valor nulo. En la sección C el esfuerzo cortante toma el valor de RB y se mantiene constante en el tramo CB (Ec. C.140). El momento flector aumenta (Ec. C.141) tomando su valor máximo en el tramo AC (Ec. C.143). En el tramo CB el momento disminuye de manera lineal (Ec. C.142). T AC ( x) pa 3L a x px1 6L 2a TCB ( x) pa 2 6L M AC ( x) px a2 3a 6 L M CB x pa 2 x 1 6 L M máx x pa 2 6 (Ec. C.139) (Ec. C.140) x3a x a a pa 3 a 1 1 3L 3L 9 L (Ec. C.141) (Ec. C.142) para a x a1 3L (Ec. C.143) Pág. 74 Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 DEC DMF Ecuación de la elástica Tramo AC Se integra doblemente la ecuación diferencial de la elástica, Ec. C.144 y C.145. w x w x AC AC px 6 EI a2 3 a L x3a x dx → a pax 2 pa 2 x 2 px 3 px 4 C1 4 EI 12 LEI 6 EI 24aEI (Ec. C.144) pax 2 pa 2 x 2 px 3 px 4 w AC ( x) C1 dx → 4 EI 12 LEI 6 EI 24aEI w AC ( x) pax 3 pa 2 x 3 px 4 px 5 C1 x C 2 36 LEI 36 LEI 24 EI 120aEI (Ec. C.145) Tramo CB Se integra doblemente la ecuación diferencial de la elástica, Ec. C.146 y C.147. w pa 2 x 1 dx x CB 6 EI L → pa 2 x pa 2 x 2 wCB ( x) C3 dx 6 EI 12 LEI → wCB ( x) w pa 2 x pa 2 x 2 C3 x CB 6 EI 12 LEI pa 2 x 2 pa 2 x 3 C3 x C 4 12 EI 36 LEI (Ec. C.146) (Ec. C.147) Condiciones de contorno Se impone que en la sección A, Ec. C.148, y C, Ec. C.149, el valor de la flecha es nulo. wAC ( x 0) 0 → C2 0 wCB ( x L) 0 → pa 2 L2 pa 2 L2 pa 2 L2 C3 L C 4 0 → C3 L C 4 12 EI 36 EI 18EI (Ec. C.148) (Ec. C.149) Anexos A, B, C, D, E y F Pág. 75 El ángulo de giro de la sección C ha de ser el mismo calculado por los tramos AC y CB, Ec. C.150. w x ( x a) AC C1 C3 w pa 3 pa 4 pa 3 pa 4 pa 3 pa 4 ( x a) → C1 C3 x CB 4 EI 12 LEI 6 EI 24aEI 6 EI 12 LEI pa 3 24 EI (Ec. C.150) La flecha en la sección C ha de ser la misma calculada por los tramos AC y CB, Ec. C.151. wAC ( x a) wCB ( x a) → C1 C3 a C4 pa 4 pa 5 pa 4 pa 5 pa 4 pa 5 C1a C3 a C 4 36 LEI 36 LEI 24 EI 120aEI 12 EI 36 LEI pa 4 30 EI (Ec. C.151) Substituyendo la Ec. C.150 en la Ec. C.151 se obtiene el valor de C4, Ec. C.152. pa 3 pa 4 a C4 24 EI 30 EI → C4 pa 4 120 EI (Ec. C.152) Substituyendo la constante C4 en la Ec. C.149, se obtiene el valor de C3, Ec. C.153. C3 L pa 4 pa 2 L2 120 EI 18EI → C3 pa 2 L pa 4 18EI 120 LEI (Ec. C.153) Substituyendo la constante C3 en la Ec. C.150, se obtiene el valor de C1, Ec. C.154. C1 pa 2 L pa 4 pa 3 18EI 220 LEI 24 EI → C1 pa 3 pa 2 L pa 4 24 EI 18EI 120 LEI (Ec. C.154) A partir de los valores de las constantes se obtienen las ecuaciones de corrimiento transversal y de la derivada de la elástica, Ec. C.155 y Ec. C.156, para el tramo AC, y, Ec. C.157 y Ec. C.158, para el tramo CB. w AC ( x) w AC ( x) w x px 3Lx 4 15aLx 3 10a 2 3L a x 2 a 2 20 L2 15aL 4a 2 360aLEI AC pa 3 pax 3 pa 2 x 3 px 4 px 5 pa 2 L pa 4 x 36 LEI 36 LEI 24 EI 120aEI 24 EI 18 EI 120 LEI pax 2 pa 2 x 2 px 3 px 4 pa 3 pa 2 L pa 4 4 EI 12 LEI 6 EI 24aEI 24 EI 18EI 120 LEI (Ec. C.155) (Ec. C.156) Pág. 76 Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 wCB ( x) pa 2 x 2 pa 2 x 3 pa 2 L pa 4 pa 4 → x 12 EI 36 LEI 18EI 220 LEI 120 EI wCB ( x) pa 2 L x 2 10L x 10 L2 3a 2 360 LEI (Ec. C.157) w pa 2 x pa 2 x 2 pa 2 L pa 4 x CB 6 EI 12 LEI 18EI 120 LEI (Ec. C.158) Ángulos de giro y flecha máxima A continuación se indican los valores de los ángulos de giro en los extremos, Ec. C.159 y C.160. A w x x 0 C1 AB pa 3 pa 2 L pa 4 24 EI 18EI 120 LEI → A pa 2 20 L2 15aL 3a 2 360 LEI B 2 2 2 4 w x L pa L pa L pa L pa x CB 6 EI 12 EI 18EI 120 LEI B pa 2 L 3a 2 1 36 EI 10 L2 (Ec. C.159) → (Ec. C.160) Para obtener el valor de la flecha máxima, se iguala a cero la ecuación de la derivada de la elástica en el tramo CB, Ec. C.158, para obtener la sección donde la flecha es máxima, Ec. C.161. L2 a 2 w pa 2 x pa 2 x 2 pa 2 L pa 4 0 → x L 3 10 x CB 6 EI 12 LEI 18EI 120 LEI (Ec. C.161) Substituyendo este valor en la ecuación de la elástica, Ec. C.157, se obtiene el valor máximo de flecha, Ec. C.162. máx wCB L L2 a 2 3 10 2 pa 18 LEI L2 a 2 L2 a 2 3 10 3 10 (Ec. C.162) Anexos A, B, C, D, E y F Pág. 77 C.9 Viga biapoyada con carga triangular sentido creciente en un extremo Cálculo de las reacciones Siguiendo el mismo procedimiento que en el apartado C.1 Viga biapoyada con carga puntual en una sección de la viga, se obtienen las reacciones RA y RB: RA pa 3L 2a 6L RB pa 2 3L Diagramas de esfuerzos cortantes y momento flector En la sección A el esfuerzo cortante toma como valor RA y en el tramo AC disminuye (Ec. C.163) pasando por valor nulo. En la sección C el esfuerzo cortante toma el valor de -RB y se mantiene constante en el tramo CB (Ec. C.164). El momento flector aumenta (Ec. C.165) tomando su valor máximo en el tramo AC (Ec. C.167). En el tramo CB el momento disminuye de manera lineal (Ec. C.166). TAC ( x) pa3L 2a px 2 6L 2a (Ec. C.163) TCB ( x) pa 2 3L (Ec. C.164) M AC ( x) px 2a x2 3 a 6 L a (Ec. C.165) M CB x pa 2 x 1 3 L (Ec. C.166) M máx x pa 2 a 2a 1 1 3 3L 3L para x a 1 a 3L (Ec. C.167) Pág. 78 Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 DEC DMF Ecuación de la elástica Tramo AC Se integra doblemente la ecuación diferencial de la elástica, Ec. C.168 y C.169. w x AC px 6 EI 2a x2 w 3 a dx → L a x AC pax 2 2a px 4 w AC ( x) C1 dx 3 L 24aEI 12 EI w AC ( x) pax 3 36 EI pax 2 2a px 4 C1 3 12 EI L 24aEI (Ec. C.168) → 2a px 5 3 C1 x C 2 L 120aEI (Ec. C.169) Tramo CB Se integra doblemente la ecuación diferencial de la elástica, Ec. C.170 y C.171. w pa 2 x 1 dx x CB 3EI L → pa 2 x pa 2 x 2 wCB ( x) C3 dx 6 LEI 3EI → wCB ( x) w pa 2 x pa 2 x 2 C3 x CB 3EI 6 LEI pa 2 x 2 pa 2 x 3 C3 x C 4 6 EI 18LEI (Ec. C.170) (Ec. C.171) Condiciones de contorno Se impone que en la sección A, Ec. C.172 y C, Ec. C.173, el valor de la flecha es nulo. wAC ( x 0) 0 → C2 0 wCB ( x L) 0 → pa 2 L2 pa 2 L2 pa 2 L2 C3 L C 4 0 → C3 L C 4 6 EI 18EI 9 EI (Ec. C.172) (Ec. C.173) Anexos A, B, C, D, E y F Pág. 79 El ángulo de giro de la sección C ha de ser el mismo calculado por los tramos AC y CB, Ec. C.174. w x ( x a) AC C1 C3 pa w pa 3 2a pa 3 pa 3 pa 4 ( x a) → C1 C3 → 3 x CB 12 EI L 24 EI 3EI 6 LEI 3 (Ec. C.174) 8EI La flecha en la sección C ha de ser la misma calculada por los tramos AC y CB, Ec. C.175. wAC ( x a) wCB ( x a) → C1 C3 a C4 11 pa pa 4 2a pa 4 pa 4 pa 5 C1a C3 a C 4 → 3 36 EI L 120 EI 6 EI 18LEI 4 (Ec. C.175) 120 EI Substituyendo la Ec. C.174 en la Ec. C.175 se obtiene el valor de C4, Ec. C.176. pa 3 pa 4 → a C4 8EI 30 EI C4 pa 4 30 EI (Ec. C.176) Substituyendo la constante C4 en la Ec. C.173, se obtiene el valor de C3, Ec. C.177. C3 L pa 4 pa 2 L2 30 EI 9 EI → C3 pa 2 L pa 4 9 EI 30 LEI (Ec. C.177) Substituyendo la constante C3 en la Ec. C.174, se obtiene el valor de C1, Ec. C.178. C1 pa 2 L pa 4 pa 3 9 EI 30 LEI 8EI → C1 pa 3 pa 2 L pa 4 8EI 9 EI 30 LEI (Ec. C.178) A partir de los valores de las constantes se obtienen las ecuaciones de corrimiento transversal y de la derivada de la elástica, Ec. C.179 y Ec. C.180, para el tramo AC, Ec. C.181 y Ec. C.182, y para el tramo CB. w AC ( x) w AC ( x) pa 3 pa 2 L pax 3 2a px 5 pa 4 x → 3 36 EI L 120aEI 8EI 9 EI 30 LEI px 3Lx 4 103L 2a a 2 x 2 a 3 40 L2 45aL 12a 2 360aLEI (Ec. C.179) Pág. 80 w x Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 pax 2 2a px 4 pa 3 pa 2 L pa 4 3 12 EI L 24aEI 8EI 9 EI 30 LEI wCB ( x) pa 2 x 2 pa 2 x 3 pa 2 L pa 4 pa 4 x → 6 EI 18LEI 9 EI 30 LEI 30 EI wCB ( x) pa 2 L x 3a 2 2 2 L x L 1 2 18 LEI 5L AC (Ec. C.180) (Ec. C.181) w pa 2 x pa 2 x 2 pa 2 L pa 4 x CB 3EI 6 LEI 9 EI 30 LEI (Ec. C.182) Ángulos de giro y flecha máxima A continuación se indican los valores de los ángulos de giro en los extremos, Ec. C.183 y C.184. A w x x 0 C1 pa 3 8EI AB pa 2 L pa 4 9 EI 30 LEI → A pa 2 40 L2 45aL 12a 2 360 LEI B 2 2 2 4 w x L pa L pa L pa L pa x CB 3EI 6 EI 9 EI 30 LEI B pa 2 L 3a 2 1 18EI 5L2 (Ec. C.183) → (Ec. C.184) Para obtener el valor de la flecha máxima, se iguala a cero la ecuación de la derivada de la elástica en el tramo CB, Ec. C.182, para obtener la sección donde la flecha es máxima, Ec. C.185. w pa 2 x pa 2 x 2 pa 2 L pa 4 0 x CB 3EI 6 LEI 9 EI 30 LEI → x L 10 L2 6a 2 30 (Ec. C.185) Substituyendo este valor en la ecuación de la elástica, Ec. C.181 se obtiene el valor máximo de flecha, Ec. C.186. máx wCB L L2 a 2 3 10 2 2 2 2 2 pa L a L a 9 LEI 3 5 3 5 (Ec. C.186) Anexos A, B, C, D, E y F Pág. 81 C.10 Viga biapoyada con carga triangular sentido creciente en un extremo Cálculo de las reacciones Siguiendo el mismo procedimiento que en el apartado C.1 Viga biapoyada con carga puntual en una sección de la viga, se obtienen las reacciones RA y RB: RA L( 2 p1 p 2 ) 6 RB L( p1 2 p 2 ) 6 Diagramas de esfuerzos cortantes y momento flector En la sección A el esfuerzo cortante toma como valor RA y en el tramo AC disminuye (Ec. C.187) pasando por valor nulo, hasta que en la sección C toma el valor de -RB. La Ec. C.188 muestra el comportamiento de momento flector para todo el tramo AB. TAB L(2 p1 p 2 ) p1 (2 L x) p 2 x x 6 2L M AB DEC DMF L(2 p1 p 2 ) x p1 (3L x) p 2 x 2 x 6 6L (Ec. C.187) (Ec. C.188) Pág. 82 Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 Ecuación de la elástica Tramo AB Se integra doblemente la ecuación diferencial de la elástica, Ec. C.189 y C.190. w x w x AB AB L(2 p1 p 2 ) x p1 (3L x) p 2 x 2 x dx → 6 EI 6 LEI L(2 p1 p2 ) x 2 p1 x 3 p2 p1 x 4 C1 12 EI 6 EI 24 LEI (Ec. C.189) L(2 p1 p 2 ) x 2 p1 x 3 p 2 p1 x 4 w AC ( x) C1 dx → 12 EI 6 EI 24 LEI w AB ( x) L(2 p1 p 2 ) x 3 p1 x 4 p 2 p1 x 5 C1 x C 2 36 EI 24 EI 120 LEI (Ec. C.190) Condiciones de contorno Se impone que en la sección A, Ec. C.191 y C, Ec. C.192 el valor de la flecha es nulo. w AB ( x 0) 0 → C2 0 wAB ( x L) 0 → C1 (Ec. C.191) (2 p1 p 2 ) L4 p1 L4 p 2 p1 L4 C1 L 0 → 36 EI 24 EI 120 EI 7 p2 8 p1 L3 (Ec. C.192) 360 EI A partir de los valores de las constantes se obtienen las ecuaciones de corrimiento transversal y de la derivada de la elástica, Ec. C.193 y Ec. C.194. w AB ( x) w AB ( x) w x x( L x) 3( p1 p 2 ) x 3 3(4 p1 p 2 ) Lx 2 (8 p1 7 p 2 ) L2 x L3 360 LEI AB L(2 p1 p 2 ) x 3 p1 x 4 p2 p1 x 5 7 p 2 8 p1 L3 x → 36 EI 24 EI 120 LEI 360 EI L(2 p1 p2 ) x 2 p1 x 3 p2 p1 x 4 7 p2 8 p1 L3 12 EI 6 EI 24 LEI 360 EI (Ec. C.193) (Ec. C.194) Anexos A, B, C, D, E y F Pág. 83 Ángulos de giro A continuación se indican los valores de los ángulos de giro en los extremos, Ec. C.195 y C.196. A B w x x 0 C1 AB → A 8 p1 7 p2 L3 3 3 4 3 w x L (2 p1 p2 ) L p1 L p2 p1 L 7 p2 8 p1 L x CB 12 EI 6 EI 24 LEI 360 EI B 7 p1 8 p2 L3 360 EI (Ec. C.195) 360 EI → (Ec. C.196) Pág. 84 Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 C.11 Viga biapoyada con carga triangular sentido creciente en un extremo Cálculo de las reacciones Siguiendo el mismo procedimiento que en el apartado C.1 Viga biapoyada con carga puntual en una sección de la viga, se obtienen las reacciones RA y RB: R A RB pL 4 Diagramas de esfuerzos cortantes y momento flector En la sección A el esfuerzo cortante toma como valor RA y en el tramo AC disminuye (Ec. C.197) pasando por valor nulo en el centro de la viga, sección C. En el tramo CB el DMF es simétrico al del tramo AC, pero de signo negativo, en la sección B el esfuerzo cortante tiene valor -RB (Ec. C.198). El momento flector aumenta (Ec. C.199) tomando su valor máximo en el la sección C (Ec. C.201). El DMF en el tramo CB es simétrico respecto al del tramo AB, en el tramo CB el momento disminuye (Ec. C.200). T AC ( x) pL x p 1 x 4 L (Ec. C.197) TCB ( x) pL x p 1 x 4 L (Ec. C.198) M AC ( x) pL 1 x x px 2 4 2 3L (Ec. C.199) M CB x pL 1 x ( L 3 x) px 2 12 2 3L (Ec. C.200) M máx x pL2 para 24 x L 2 (Ec. C.201) Anexos A, B, C, D, E y F Pág. 85 DEC DMF Ecuación de la elástica Se estudia el tramo AB ya que debido a la simetría de la estructura y de las cargas aplicadas, la deformada es simétrica. Tramo AC Se integra doblemente la ecuación diferencial de la elástica, Ec. C.202 y Ec. C.203. w x AC pL px 2 1 x w x dx → 4 EI EI 2 3 L x AC pLx 2 px 3 px 4 C1 8EI 6 EI 12 LEI (Ec. C.202) pLx 2 px 3 px 4 w AC ( x) C1 dx → 6 EI 12 LEI 8EI w AC ( x) pLx 3 px 4 px 5 C1 x C 2 24 EI 24 EI 60 LEI (Ec. C.203) Condiciones de contorno Se impone que en la sección A, Ec. C.204, el valor de la flecha es nulo. wAC ( x 0) 0 → C2 0 (Ec. C.204) Debido a la simetría, la flecha en la sección C es máxima. Por tanto, la derivada de la ecuación de la elástica, Ec. C.203, ha de ser nula, Ec. C.205. w x ( x a) 0 → AC pLx 2 px 3 px 4 C1 0 8EI 6 EI 12 LEI → C1 pL3 64 EI (Ec. C.205) Pág. 86 Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 Substituyendo los valores de las constantes se obtienen las ecuaciones de corrimiento transversal y de la derivada de la elástica, Ec. C.206 y Ec. C.207, para el tramo AC. wAC ( x) pLx 3 px 4 px 5 pL3 x → 24 EI 24 EI 60 LEI 64 EI w AC ( x) px 192 EI w x pLx 2 px 3 px 4 pL3 8EI 6 EI 12 LEI 64 EI AC 16 x 4 3 2 2 4 5 8Lx 8L x 3L (Ec. C.206) (Ec. C.207) Ángulos de giro y flecha máxima Por simetría los ángulos de giro en los extremos tienen el mismo valor, con signo contrario, Ec. C.208 y C.209. A w x x 0 C1 AB B A → A pL3 64 EI (Ec. C.208) pL3 64 EI (Ec. C.209) Por simetría la flecha toma su valor máximo en la sección C, con la ecuación de la elástica se obtiene el valor de flecha máxima, Ec. C.210. máx w AC (a) pa 192 EI 16a 4 3 2 2 4 5 8La 8L a 3L → máx pL4 640 EI (Ec. C.210) Anexos A, B, C, D, E y F Pág. 87 C.12 Viga biapoyada con carga triangular creciente y decreciente Cálculo de las reacciones Siguiendo el mismo procedimiento que en el apartado C.1 Viga biapoyada con carga puntual en una sección de la viga, se obtienen las reacciones RA y RB: RA p ( L b) 6 RB p ( L a) 6 Diagramas de esfuerzos cortantes y momento flector En la sección A el esfuerzo cortante toma como valor RA y en el tramo AC disminuye (Ec. C.211) pasando por valor nulo en el centro de la viga, sección C. En el tramo CB el DMF es simétrico al del tramo AC, pero de signo negativo, en la sección B el esfuerzo cortante tiene valor -RB (Ec. C.212). El momento flector aumenta (Ec. C.213) tomando su valor máximo en el la sección C (Ec. C.215). El DMF en el tramo CB es simétrico respecto al del tramo AB, en el tramo CB el momento disminuye (Ec. C.214). TAC ( x) pL b px 2 6 2a (Ec. C.211) TCB ( x) p L a p L x 6 2b (Ec. C.212) M AC ( x) 3 p 2L a x px 6 6a (Ec. C.213) 2 M CB x p p L x ( L a)( L x) 6 6L a M máx x p 9 3 a 2 L a 3 3 para (Ec. C.214) x a 2 L a 3 y ab (Ec. C.215) Pág. 88 Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 DEC DMF Ecuación de la elástica Tramo AC Se integra doblemente la ecuación diferencial de la elástica, Ec. C.216 y Ec. C.217. w x AC 3 p 2L a x px dx → w 6aEI x 6 EI AC p2 L a x 2 px 4 C1 12 EI 24aEI (Ec. C.216) p2 L a x 2 px 4 w AC ( x) C1 dx → 12 EI 24aEI w AC ( x) p2 L a x 3 px 5 C1 x C 2 36 EI 120aEI (Ec. C.217) Tramo CB Se integra doblemente la ecuación diferencial de la elástica, Ec. C.218 y C.219. w x CB 3 p p L x ( L a)( L x) dx → 6 EI L a 6 EI w p pL a x 2 p 4 L3 x 6 L2 x 2 4 Lx 3 x 4 ( L2 aL) x C3 x CB 6 EI 12 EI 24bEI p( L2 aL) x pL a x 2 p 4 L3 x 6 L2 x 2 4 Lx 3 x 4 wCB ( x) C3 dx 6 EI 12 EI 24bEI wCB ( x) p( L2 aL) x 2 pL a x 3 p 12 EI 36 EI 120bEI 10 L3 x 2 10 L2 x 3 C3 x C 4 5Lx 4 x 5 (Ec. C.218) → (Ec. C.219) Anexos A, B, C, D, E y F Pág. 89 Condiciones de contorno Se impone que en la sección A, Ec. C.220 y C, Ec. C.221, el valor de la flecha es nulo. wAC ( x 0) 0 → C2 0 wCB ( x L) 0 → C3 L C 4 (Ec. C.220) p( L2 aL) L2 pL a L3 p 4 L5 C3 L C 4 0 → 12 EI 36 EI 120bEI p 20 L4 20aL3 12 pL5 360 EI 360bEI (Ec. C.221) El ángulo de giro de la sección C ha de ser el mismo calculado por los tramos AC y CB, Ec. C.222. w x ( x a) AC w ( x a) → x CB p2 L a a 2 pa 3 p( L2 aL)a pL a a 2 p 4 L3 a 6 L2 a 2 4 La 3 a 4 C1 C3 12 EI 24 EI 6 EI 12 EI 24bEI C1 C3 p15a 3 60aL2 30a 2 L p 60aL3 90a 2 L2 60a 3 L 15a 4 360 EI 360bEI (Ec. C.222) La flecha en la sección C ha de ser la misma calculada por los tramos AC y CB, Ec. C.223. wAC ( x a) wCB ( x a) → p2 L a a 3 pa 4 p( L2 aL)a 2 pL a a 3 p C1a 36 EI 120 EI 12 EI 36 EI 120bEI 10 L3 a 2 5 La 4 C3 a C 4 10 L2 a 3 a 5 3 pa 4 30a 2 L2 p p 30a 2 L3 30a 3L2 15a 4 L 3a 5 (Ec. C.223) C1 C3 a C4 360 EI 360 EI 360bEI Substituyendo la Ec. C.222 en la Ec. C.223 se obtiene el valor de C4, Ec. C.224. C4 p 12a 4 30a 2 L2 30a 3 L2 p 30a 2 L3 60a 3 L2 45a 4 L 12a 5 360 EI 360bEI C4 → 3a 4 Lp 360bEI (Ec. C.224) Substituyendo la constante C4 en la Ec. C.221, se obtiene el valor de C3, Ec. C.225). C3 L 3a 4 Lp p 20 L4 20aL3 12 pL5 360bEI 360 EI 360bEI → C3 p 8L4 20a 2 L2 3a 4 360bEI (Ec. C.225) Substituyendo la constante C3 en la Ec. C.222, se obtiene el valor de C1, Ec. C.226. Pág. 90 Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 C1 p 8L4 20a 2 L2 3a 4 p 15a 3 60aL2 30a 2 L p 60aL3 90a 2 L2 60a 3 L 15a 4 360bEI 360 EI 360bEI C1 p 3a 4 8L4 20a 2 L2 15a 3 L 360bEI (Ec. C.226) A partir de los valores de las constantes se obtienen las ecuaciones de corrimiento transversal y de la derivada de la elástica, Ec. C.227 y Ec. C.228, para el tramo AC, y, Ec. C.229 y Ec. C.230, para el tramo CB. w AC ( x) w AC ( x) w x p2 L a x 3 px 5 p 3a 4 8L4 20a 2 L2 15a 3 L x 36 EI 120aEI 360bEI px 3x 4 10L b x 2 L b 7 L2 3b 2 360 EI a (Ec. C.227) p2 L a x 2 px 4 p L b 2 7 L 3b 2 12 EI 24aEI 360 EI (Ec. C.228) AC p ( L2 aL ) x 2 p L a x 3 p 10 L3 x 2 10 L2 x 3 5 Lx 4 x 5 12 EI 36 EI 120bEI p 8 L4 20a 2 L2 3a 4 3a 4 Lp x 360bEI 360bEI wCB ( x) wCB ( x) p( L x) 3 L x 4 10L a L x 2 L a 7 L2 3a 2 360 EI b (Ec. C.229) w p pL a x 2 p 4 L3 x 6 L2 x 2 4 Lx 3 x 4 ( L2 aL) x x CB 6 EI 12 EI 24bEI p 8 L4 20a 2 L2 3a 4 360bEI → (Ec. C.230) Ángulos de giro Substituyendo en la derivada de la ecuación de la elástica se obtienen los ángulos de giro en los extremos, secciones A y B, Ec. C.231 y Ec. C.232. A A w x x 0 C1 AB p L b 2 7 L 3b 2 360 EI B wCB x L → p 3a 4 8L4 20a 2 L2 15a 3 L 360bEI B (Ec. C.231) p L a 2 7 L 3a 2 360 EI (Ec. C.232) Anexos A, B, C, D, E y F Pág. 91 C.13 Viga biapoyada con carga triangular creciente y decreciente simétrica Cálculo de las reacciones Este tipo de carga es un caso particular del tipo anterior, voladizo con carga puntual en una sección de la viga. En este caso las distancias a y b son iguales a la mitad de la distancia de la viga. Para obtener el valor de las reacciones RA y RB, se sigue el mismo procedimiento que en el apartado C.1 Viga biapoyada con carga puntual en una sección de la viga, sumatorio de fuerzas verticales igual a cero: R A RB pL 4 Diagramas de esfuerzos cortantes y momento flector El esfuerzo cortante (Ec. C.233 y Ec. C.234) y el momento flector (Ec. C.235, Ec. C.236 y Ec. C.237) se comportan de la misma manera que en el apartado C.12 Viga biapoyada con carga triangular creciente y decreciente, por tratarse de un caso concreto de este tipo de viga. pL px 2 4 L 2 pL pL x TCB ( x) 4 L pL 4x3 x 2 M AC ( x) 4 3L pL L 4x 2 4x3 3x M CB ( x) 2 4 3 L 3L pL2 M máx ( x a L ) 2 12 TAC ( x) DEC DMF (Ec. C.233) Ec. C.234) (Ec. C.235) (Ec. C.236) (Ec. C.237) Pág. 92 Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 Ecuación de la elástica Tramo AC Se integra doblemente la ecuación diferencial de la elástica, Ec. C.238 y Ec. C.239. w x AC pL 4 x 3 x 2 dx 3L 4 EI → pLx 2 px 4 w AC ( x) C1 dx 24 LEI 8EI w x AC pLx 2 px 4 C1 8EI 24 LEI → wAC ( x) pLx 3 px 5 C1 x C2 24 EI 60 LEI (Ec. C.238) (Ec. C.239) Condiciones de contorno Se impone que en la sección A, Ec. C.240, el valor de la flecha es nulo. wAC ( x 0) 0 → C2 0 (Ec. C.240) El ángulo de giro de la sección C ha de ser nulo debido a que la flecha toma su valor máximo, Ec. C.241. w x ( x L / 2) 0 → AC pL3 pL3 C1 0 32 EI 192 EI → C1 5 pL3 192 EI (Ec. C.241) A partir de los valores de las constantes se obtienen las ecuaciones de corrimiento transversal y de la derivada de la elástica, Ec. C.242 y Ec. C.243. wAC ( x) pLx 3 px 5 5 pL3 x 24 EI 60 LEI 192 EI (Ec. C.242) w x pLx 2 px 4 5 pL3 8EI 24 LEI 192 EI (Ec. C.243) AC Ángulos de giro y flecha máxima Por simetría los ángulos de giro en los extremos tienen el mismo valor, con signo contrario, Ec. C.244. A B w x x 0 C1 AB 5 pL3 192 EI (Ec. C.244) Por simetría la flecha toma su valor máximo en la sección C, con la ecuación de la elástica se obtiene el valor de flecha máxima, Ec. C.245. máx wAC ( x L / 2) pLx 3 px 5 5 pL3 x 24 EI 60 LEI 192 EI → máx pL4 120 EI (Ec. C.245) Anexos A, B, C, D, E y F Pág. 93 C.14 Viga biapoyada con carga repartida trapezoidal Cálculo de las reacciones Siguiendo el mismo procedimiento que en el apartado C.1 Viga biapoyada con carga puntual en una sección de la viga, se obtienen las reacciones RA y RB: R A RB p L a 2 Diagramas de esfuerzos cortantes y momento flector En la sección A el esfuerzo cortante toma el valor máximo y disminuye de manera cuadrática (Ec. C.246) en el tramo AC, a partir de la sección C disminuye de manera lineal (Ec. C.247) hasta ser nulo en el centro de la viga. El momento flector aumenta de forma cúbica (Ec. C.248 y Ec. C.249) tomando su valor máximo en la sección central de la viga (Ec. C.250). pL a px 2 2 2a p TCD ( x ) L 2 x 2 p px 3 M AC ( x) L a x 2 6a p 2 M CD ( x) 3Lx a 3 x 2 6 p M máx ( x L ) 3L2 4a 2 2 24 TAC ( x) DMF (Ec. C.247) (Ec. C.248) DEC (Ec. C.246) (Ec. C.249) (Ec. C.250) Pág. 94 Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 Ecuación de la elástica Tramo AC Se integra doblemente la ecuación diferencial de la elástica, Ec. C.251 y Ec. C.252. w x AC 3 p L a x px dx → w 6aEI x 2 EI AC pL a x 2 px 4 C1 4 EI 24aEI (Ec. C.251) pL a x 2 px 4 w AC ( x) C1 dx → 4 EI 24aEI pL a x 3 px 5 C1 x C 2 12 EI 120aEI wAC ( x) (Ec. C.252) Tramo CD Se integra doblemente la ecuación diferencial de la elástica Ec. C.253 y Ec.C.254. w p 3Lx a 2 3x 2 x CD 6 EI dx → w pLx 2 pa 2 x px 3 C3 x CD 4 EI 6 EI 6 EI (Ec. C.253) pLx 2 pa 2 x px 3 wCD ( x) C3 dx → 6 EI 6 EI 4 EI wCD ( x) pLx 3 pa 2 x 2 px 4 C3 x C 4 12 EI 12 EI 24 EI (Ec. C.254) Condiciones de contorno Se impone que en la sección A, Ec. C.255, el valor de la flecha es nulo. wAC ( x 0) 0 → C2 0 (Ec. C.255) El ángulo de giro en el centro de la viga ha de ser nulo debido a que la flecha toma su valor máximo, Ec. C.256. w ( x L / 2) 0 x CD C3 → pL 3L2 4a 2 L2 48 EI pL3 pa 2 L pL3 C3 0 16 EI 12 EI 48EI → (Ec. C.256) Anexos A, B, C, D, E y F Pág. 95 El ángulo de giro de la sección C ha de ser el mismo calculado por los tramos AC y CD, Ec. C.257. w x ( x a) AC C1 C1 w pL a a 2 pa 3 pLa 2 pa 3 pa 3 ( x a) → C1 C3 → x CB 4 EI 24 EI 4 EI 6 EI 6 EI pLa 2 pa 3 pa 3 pL pL a a 2 pa 3 3L2 4a 2 L2 4 EI 6 EI 6 EI 48EI 4 EI 24 EI p a 3 L3 2a 2 L 24 EI → (Ec. C.257) Por simetría la flecha en la sección C y D ha de ser la misma calculada por los tramos AC y CD, Ec. C.258. w AC ( x a) wCD ( x a b) → pL a a 2 pa 3 pLa b pa 2 a b pa b C1 C3 C 4 4 EI 24 EI 12 EI 12 EI 24 EI 3 C4 2 4 a4 p 120 EI (Ec. C.258) A partir de los valores de las constantes se obtienen las ecuaciones de corrimiento transversal y de la derivada de la elástica, Ec. C.259 y Ec. C.260, para el tramo AC, y, Ec. C.261 y Ec. C.262, para el tramo CD. w AC ( x) w AC ( x) w x px x 4 ( L a) 2 L2 ( L b) b2 5 2 x EI 120a 12 192 L AC wCD ( x) wCD ( x) pL a x 3 px 5 p a 3 L3 2a 2 L x 12 EI 120aEI 24 EI pL a x 2 px 4 p a 3 L3 2a 2 L 4 EI 24aEI 24 EI (Ec. C.259) (Ec. C.260) pLx 3 pa 2 x 2 px 4 pL a4 p → 3L2 4a 2 L2 x 12 EI 12 EI 24 EI 48EI 120 EI p EI x 4 Lx 3 a 2 x 2 L 2 a4 ( L 2a 2 ) x 12 24 120 24 12 (Ec. C.261) Pág. 96 Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 w pLx 2 pa 2 x px 3 pL 3L2 4a 2 L2 x CD 4 EI 6 EI 6 EI 48EI (Ec. C.262) Ángulos de giro Por simetría y a partir de la derivada de la ecuación de la elástica, se obtienen los ángulos de giro en los extremos, los cuales tienen el mismo valor, con signo contrario, Ec. C.263. A B w x x 0 C1 AB p a 3 L3 2a 2 L 24 EI (Ec. C.263) Por simetría la flecha toma su valor máximo en la sección central de la viga, con la ecuación de la elástica se obtiene el valor de flecha máxima, Ec. C.264. máx wCD ( x L / 2) máx pL3 pa 2 L2 pL4 pL2 a4 p → 3L2 4a 2 L2 96 EI 48EI 384 EI 96 EI 120 EI pL4 5L2 4a 2 1920 EI 2 (Ec. C.264) Anexos A, B, C, D, E y F Pág. 97 C.15 Viga biapoyada con un momento flector aplicado en un extremo Cálculo de las reacciones Siguiendo el mismo procedimiento que en el apartado C.1 Viga biapoyada con carga puntual en una sección de la viga, se obtienen las reacciones RA y RB: R A RB M L Diagramas de esfuerzos cortantes y momento flector El esfuerzo cortante es constante en toda la sección de la viga (Ec. C.265). El momento flector disminuye de forma lineal a lo largo de la viga (Ec. C.266) tomando su valor máximo en la sección donde está aplicado el momento flector, sección A, y siendo nulo en la sección B. M L (Ec. C.265) x M AB ( x) M 1 L (Ec. C.266) T AB ( x) DEC DMF Ecuación de la elástica Tramo AB Se integra doblemente la ecuación diferencial de la elástica (Ec. C.267 y Ec. C.268). w x AB M x 1 dx EI L → w x AB Mx Mx 2 C1 EI 2 LEI Mx Mx 2 Mx 2 Mx 3 C1 x C 2 w AB ( x) C1 dx → w AB ( x) 2 EI 6 LEI EI 2 LEI (Ec. C.267) (Ec. C.268) Pág. 98 Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 Condiciones de contorno Se impone que en la sección A, Ec. C.269, y B, Ec. C.270 el valor de la flecha es nulo. w AB ( x 0) 0 → wAB ( x L) 0 → C2 0 (Ec. C.269) ML2 ML2 ML C1L 0 → C1 3EI 2 EI 6 EI (Ec. C.270) Substituyendo los valores de las constantes C1 y C2, Ec. C.269 y Ec. C.270, se obtienen las ecuaciones de corrimiento transversal y de la derivada de la elástica, Ec. C.271 y Ec. C.272. Mx 2 Mx 3 MLx → w AB ( x) 2 EI 6 LEI 3EI w x AB L x 2 ML L x 1 w AB ( x) 6 EI L (Ec. C.271) Mx Mx 2 ML EI 2 LEI 3EI (Ec. C.272) Ángulos de giro y flecha máxima A continuación se indican los valores de los ángulos de giro en los extremos, Ec. C.273 y Ec. C.274. A B w x w x x 0 C1 → A AB ML 3EI x L ML ML ML AB EI 2 EI → 3EI (Ec. C.273) B ML 6 EI (Ec. C.274) Para obtener el valor de la flecha máxima, se iguala a cero la ecuación de la derivada de la elástica, Ec. C.272, para obtener la sección donde la flecha es máxima, Ec. C.275. w x AB 3 x2 L Mx Mx 2 ML 0 → x L1 0 → x 3 2L 3 EI 2 LEI 3EI (Ec. C.275) Substituyendo este valor en la ecuación de la elástica, Ec. C.272, se obtiene el valor máximo de flecha, Ec. C.276. 2 máx 3 3 3 2 L1 3 M L1 M ML 1 3 3 3 3 w AB L1 3 2 EI 6 LEI 3EI máx ML2 9 3EI → (Ec. C.276) Anexos A, B, C, D, E y F Pág. 99 C.16 Viga biapoyada con dos momentos flectores aplicados en cada extremo y sentido opuesto Cálculo de las reacciones Siguiendo el mismo procedimiento que en el apartado C.1 Viga biapoyada con carga puntual en una sección de la viga, se obtienen las reacciones RA y RB: R A RB Ma Mb L Diagramas de esfuerzos cortantes y momento flector El esfuerzo cortante es constante en toda la sección de la viga (Ec. C.277). El momento flector disminuye de forma lineal a lo largo de la viga (Ec. C.278). Ma Mb L M M M AB ( x ) a L x b x L L T AB ( x) (Ec. C.277) (Ec. C.278) DEC DMF Ecuación de la elástica Tramo AB Se integra doblemente la ecuación diferencial de la elástica (Ec. C.279 y Ec. C.280). w x AB M w M a L x b x dx → LEI x LEI AB M a x M a x2 M b x2 C1 EI 2 LEI 2 LEI (Ec. C.279) Pág. 100 Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 M x M x2 M x2 w AB ( x) a a b C1 dx → 2 LEI 2 LEI EI w AB ( x) M a x 2 M a x3 M b x3 C1 x C 2 2 EI 6 LEI 6 LEI (Ec. C.280) Condiciones de contorno Se impone que en la sección A, Ec. C.281, y B, Ec. C.282, el valor de la flecha es nulo. w AB ( x 0) 0 C2 0 → wAB ( x L) 0 → (Ec. C.281) M a M b L M a L2 M a L2 M b L2 C1 L 0 → C1 6 EI 2 EI 6 EI 6 EI (Ec. C.282) Substituyendo los valores de las constantes C1 y C2, Ec. C.281 y Ec. C.282, se obtienen las ecuaciones de corrimiento transversal y de la derivada de la elástica, Ec. C.283 y Ec. C.284. w AB ( x) M a M b L → M a x 2 M a x3 M b x3 x 2 EI 6 LEI 6 LEI 6 EI w AB ( x) M a x( L x) ( L x) M b x 1 1 6 EI L M a L w x AB (Ec. C.283) M a x M a x 2 M b x 2 M a M b L EI 2 LEI 2 LEI 6 EI (Ec. C.284) Ángulos de giro A continuación se indican los valores de los ángulos de giro en los extremos, Ec. C.285 y Ec. C.286. A B B w x w x x 0 C1 → A M a M b L AB x L M a L M a L M b L M a M b L AB M a 2M b L 6 EI EI 2 EI 2 EI (Ec. C.285) 6 EI 6 EI → (Ec. C.286) Anexos A, B, C, D, E y F Pág. 101 C.17 Viga biapoyada con dos momentos flectores aplicados en cada extremo y mismo sentido Cálculo de las reacciones Siguiendo el mismo procedimiento que en el apartado C.1 Viga biapoyada con carga puntual en una sección de la viga, se obtienen las reacciones RA y RB: R A RB Ma Mb L Diagramas de esfuerzos cortantes y momento flector El esfuerzo cortante es constante en toda la sección de la viga (Ec. C.287). El momento flector disminuye de forma lineal a lo largo de la viga (Ec. C.288). Ma Mb L M M M AB ( x ) a L x b x L L T AB ( x) (Ec. C.287) (Ec. C.288) DEC DMF Ecuación de la elástica Tramo AB Se integra doblemente la ecuación diferencial de la elástica, Ec. C.289 y Ec. C.290. w x AB M w M a L x b x dx → LEI x LEI AB M a x M a x2 M b x2 C1 EI 2 LEI 2 LEI (Ec. C.289) Pág. 102 Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 M x M x2 M x2 w AB ( x) a a b C1 dx → 2 LEI 2 LEI EI w AB ( x) M a x 2 M a x3 M b x3 C1 x C 2 2 EI 6 LEI 6 LEI (Ec. C.290) Condiciones de contorno Se impone que en la sección A, Ec. C.291, y B, Ec. C.292, el valor de la flecha es nulo. w AB ( x 0) 0 C2 0 → wAB ( x L) 0 → (Ec. C.291) 2M a M b L M a L2 M a L2 M b L2 C1 L 0 → C1 6 EI 2 EI 6 EI 6 EI (Ec. C.292) Substituyendo los valores de las constantes C1 y C2, Ec. C.291 y Ec. C.292, se obtienen las ecuaciones de corrimiento transversal y de la derivada de la elástica, Ec. C.293 y Ec. C.294. w AB ( x) M a x 2 M a x 3 M b x 3 2M a M b L x 2 EI 6 LEI 6 LEI 6 EI → w AB ( x) x( L x) ( M a M b ) x (2M a M b ) 6 LEI (Ec. C.293) w x 2M a M b L M a x M a x2 M b x2 EI 2 LEI 2 LEI 6 EI (Ec. C.294) AB Ángulos de giro A continuación se indican los valores de los ángulos de giro en los extremos, Ec. C.295 y Ec. C.296. A B B w x w x x 0 C1 → A 2M a M b L AB x L M a L M a L M b L 2M a M b L AB 2M b M a L 6 EI EI 2 EI 2 EI (Ec. C.295) 6 EI 6 EI → (Ec. C.296) Anexos A, B, C, D, E y F Pág. 103 C.18 Viga biapoyada con un momento flector M, aplicado en una sección C Cálculo de las reacciones Siguiendo el mismo procedimiento que en el apartado C.1 Viga biapoyada con carga puntual en una sección de la viga, se obtienen las reacciones RA y RB: R A RB M L Diagramas de esfuerzos cortantes y momento flector El esfuerzo cortante es constante en toda la sección de la viga (Ec. C.297). El momento flector aumenta en módulo de forma lineal en el tramo AC (Ec. C.298), y en el tramo CB el momento aumenta de forma lineal (Ec. C.299). En la sección C el momento es nulo (Ec. C.300 y Ec. C.301) M L M M AB ( x) x L M L x M CB ( x ) L Ma M CIzq ( x) L Mb M CDer ( x) L T AB ( x ) DEC DMF (Ec. C.297) (Ec. C.298) (Ec. C.299) (Ec. C.300) (Ec. C.301) Pág. 104 Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 Ecuación de la elástica Tramo AC Se integra doblemente la ecuación diferencial de la elástica, Ec. C.302 y Ec. C.303. w x M x dx → LEI AC M w AC ( x) x 2 C1 dx 2 LEI w x AC M x 2 C1 2 LEI → w AC ( x) M x 3 C1 x C 2 6 LEI (Ec. C.302) (Ec. C.303) Tramo CB Se integra doblemente la ecuación diferencial de la elástica, Ec. C.304 y Ec. C.305. 2 w M L x dx → w Mx Mx C3 x CB x CB EI 2 LEI LEI (Ec. C.304) Mx Mx 2 Mx 2 Mx 3 C3 x C 4 wCB ( x) C3 dx → wCB ( x) 2 EI 6 LEI EI 2 LEI (Ec. C.305) Condiciones de contorno Se impone que en la sección A, Ec. C.306, y B, Ec. C.307, el valor de la flecha es nulo. w AB ( x 0) 0 → C2 0 wCB ( x L) 0 → (Ec. C.306) ML2 ML2 ML2 C3 L C 4 0 → C3 L C 4 2 EI 6 EI 3EI (Ec. C.307) El ángulo de giro de la sección C ha de ser el mismo calculado por los tramos AC y CB, Ec. C.308. w x ( x a) AC w ( x a) → x CB C1 C3 Ma EI Ma 2 Ma Ma 2 C1 C3 2 LEI EI 2 LEI (Ec. C.308) La flecha en la sección C ha de ser la misma calculada por los tramos AC y CB, Ec. C.309. Anexos A, B, C, D, E y F Pág. 105 wAC ( x a) wCB ( x a) C1 C3 a C4 Ma Ma 3 Ma 2 Ma 3 C1a C3 a C 4 → 6 LEI 2 EI 6 LEI → 2 (Ec. C.309) 2 EI Substituyendo la Ec. C.308 en la Ec. C.309 se obtiene el valor de C4, Ec. C.310. 2 Ma Ma Ma → C4 a C 4 2 EI 2 EI EI 2 (Ec. C.310) Substituyendo la constante C4 en la Ec. C.307, se obtiene el valor de C3, Ec. C.311. C3 L Ma 2 ML2 2 EI 3EI → C3 ML Ma 2 3EI 2 LEI (Ec. C.311) Substituyendo la constante C3 en la Ec. C.308, se obtiene el valor de C1, Ec. C.312. ML Ma 2 Ma C1 3EI 2 LEI EI → C1 ML Ma 2 Ma 3EI 2 LEI EI (Ec. C.312) A partir de los valores de las constantes se obtienen las ecuaciones de corrimiento transversal y de la derivada de la elástica para el tramo AC, Ec. C.313 y Ec. C.314, y para el tramo CB, Ec. C.315 y Ec. C.316. w AC ( x) MLx 3b 2 x 2 M 3 ML Ma 2 Ma 1 2 2 x → w AC ( x) x 6 EI 6 LEI L L 3EI 2 LEI EI w x Mx 2 ML Ma 2 Ma → 2 LEI 3EI 2 LEI EI AC wCB ( x) (Ec. C.313) (Ec. C.314) Mx 2 Mx 3 ML Ma 2 Ma 2 x → 2 EI 6 LEI 3EI 2 LEI 2 EI 2 ML( L x) a 2 L x wCB ( x) 1 3 2 6 EI L L (Ec. C.315) w Mx Mx 2 ML Ma 2 x CB EI 2 LEI 3EI 2 LEI (Ec. C.316) Pág. 106 Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 Ángulos de giro y flecha máxima A continuación se indican los valores de los ángulos de giro en los extremos, Ec. C.317 y C.318, y en la sección C, Ec. C.319. A w x x 0 C1 AC ML Ma 2 Ma 3EI 2 LEI EI B 2 w x L ML ML ML Ma x CB EI 2 EI 3EI 2 LEI C w x x a AC A ML 3b 2 2 1 6 EI L (Ec. C.317) → B ML 3a 2 2 1 6 EI L (Ec. C.318) → M Ma 2 ML Ma 2 Ma a3 b3 → C 2 2 LEI 3EI 2 LEI EI 3L EI (Ec. C.319) A partir de la ecuación de la elástica en el tramo AC, Ec. C. 313, se obtiene el valor de la flecha en C, Ec. C.320. C w AC ( x a) MLa 3b 2 a 2 1 2 2 6 EI L L → C Mab b a 3LEI (Ec. C.320) Anexos A, B, C, D, E y F Pág. 107 D. Análisis de vigas simples apoyadas en un extremo y empotradas en el otro Las vigas apoyadas en un extremo y empotradas en el otro son vigas hiperestáticas, ya que con las ecuaciones de equilibrio no se pueden determinar las reacciones en los enlaces, siendo 3 el número de incógnitas, dos en el empotramiento y una en el apoyo. Se trata de un sistema hiperestático de primer grado (3 incógnitas- 2 ecuaciones de equilibrio=1er grado). Como se ha indicado en la memoria, se pueden utilizar dos métodos de cálculo, los basados en la ecuación diferencial de la elástica y en los teoremas de Mohr. El formulario se ha realizado aplicando el método basado en los teoremas de Mohr, y el método de superposición. En primer lugar se elige la incógnita superflua, que para todos los casos ha sido MB. Por superposición de una viga biapoyada con la carga inicial y una viga biapoyada con un momento flector aplicado en un extremo (Fig. D.1) se obtiene el valor de MB (Ec. D.1) = A B RA RB MB + A B RAi R Bi A B M B /L MB /L Fig. D.1 Superposición de viga apoyada y empotrada Los parámetros con subíndice i, se refieren a la viga biapoyada con la carga aplicada, y que ya se han obtenido en el Anexo C. Viga sobre dos apoyos simples. B Bi M BL 0 6 EI (Ec. D.1) Pág. 108 Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 Obtenido el valor de M B y también por superposición se obtienen las reacciones en A y en B (Ec. D.2 y Ec. D.3), la ley de momentos flectores y de esfuerzos cortantes (Ec. D.4 y Ec. D.5), y la ecuación de la elástica y de su derivada (Ec. D.6 y Ec. D.7). R A R Ai MB L (Ec. D.2) R B R Bi MB L (Ec. D.3) M Mi M B x L (Ec. D.4) T Ti MB L w wi M B L2 x 2 6 LEI w' wi' MB 2 L 3x 2 6 LEI (Ec. D.5) (Ec. D.6) (Ec. D.7) Anexos A, B, C, D, E y F Pág. 109 D.1 Viga apoyada y empotrada con carga puntual en una sección P = C A B RA RB a b L P MB + A B R Ai R Bi A B MB/L M B /L Fig. D.2 Superposición de viga apoyada y empotrada con carga puntual en una sección Por superposición se obtiene el valor del momento en B. En el extremo B el giro de la sección es nulo ( B 0 ) por tratarse de empotramiento. Por tanto el momento de la sección B, también se puede obtener por superposición según la siguiente expresión, (Ec. D.8). B Bi M BL 0 3EI → PabL a M B L 6 LEI 3EI → MB Pa L2 a 2 2L2 (Ec. D.8) Reacciones Una vez obtenido el valor de MB, y a partir de las Ec. D.2 y Ec. D.3 obtienen los valores de las reacciones (Ec. D.9 y Ec. D.10). RA Pb Pa L2 a 2 1 L L 2 L2 RB Pa Pa L2 a 2 1 L L 2 L2 RA → → Pb 2 3L b 2 L3 RB Pa 3L2 a 2 2 L3 (Ec. D.9) (Ec. D.10) Pág. 110 Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 Diagramas de esfuerzos cortantes y momento flector También se obtienen la ley de momentos flectores para los tramos AC y CB (Ec. D.11 y Ec. D.12) y de esfuerzos cortantes para los tramos AB y CB (Ec. D.13 y Ec. D.14). M AC Pbx Pa L2 a 2 x L L 2 L2 M CB PaL x Pa L2 a 2 x L L 2 L2 T AC → M AC Pb 2 2b 3a x 2 L3 M CB → Pa 2 L3 3L2 x a 2 x 2 L3 (Ec. D.11) Pb 2 3L b 2 L3 TCB Pa Pa L2 a 2 L 2L3 (Ec. D.12) (Ec. D.13) → TCB Pa 3L2 a 2 2 L3 (Ec. D.14) DEC DEF Ecuación de la elástica Se obtiene la ecuación de la elástica en AC, Ec. D.15, y en CB, Ec. D.16. w AC x PLbx b 2 x 2 1 6 EI L2 L2 w AC ( x) Pb 2 x 3aL2 x 2 2 L a 12 L3 EI Pa L2 a 2 L2 x 2 6 LEI 2 L2 → (Ec. D.15) Anexos A, B, C, D, E y F Pág. 111 wCB x PLaL x a 2 L x 1 L2 L2 6 EI wCB ( x) PaL x 12 EI 2 2 a2 31 L2 Pa L2 a 2 L2 x 2 6 LEI 2 L2 a2 3 2 L → L x L (Ec. D.16) Ángulos de giro y flecha El ángulo de giro en la sección A, Ec. D.17, también se obtiene por superposición. A PabL b Pa L2 a 2 L 6 LEI 6 EI 2 L2 A → PaL a 4 LEI 2 (Ec. D.17) Para obtener el valor de la sección donde la flecha es máxima, se iguala a cero la ecuación de la derivada de la elástica, Ec. D.18. w x AC Pb 2 3aL2 x 2 Lx 3 ax 2 0 → 3 12 L EI xL a 2L a (Ec D.18) Substituyendo este valor en la ecuación de la elástica, Ec. D.15, se obtiene el valor máximo de flecha, Ec. D.19. máx a w AB L 2 L a máx Pab 2 6 EI a 2L a a 2L a 12 L3 EI Pb 2 L 2 a 3aL2 L → 2 L a 2L a (Ec. D.19) Pág. 112 Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 D.2 Viga apoyada y empotrada con carga puntual en la sección central P = C A B RA RB L/2 L/2 P MB + A B RAi RB i A B MB / L M B/ L Fig. D.3 Superposición de viga apoyada y empotrada con carga puntual en la sección central Se obtienen el momento en la sección B a partir de la Ec. D.1 y por superposición (Ec. D.20). B Bi M BL 3EI → PL2 M B L 0 → 16 EI 3EI MB 3PL 16 (Ec. D.20) Reacciones Una vez obtenido el valor de MB, y a partir de las Ec. D.2 y Ec. D.3 se obtienen los valores de las reacciones (Ec. D.21 y Ec. D.22). RA P 3PL 1 2 16 L → RA 5P 16 (Ec. D.21) RB P 3PL 1 2 16 L → RB 11P 16 (Ec. D.22) Diagramas de esfuerzos cortantes y momento flector También se obtienen la ley de momentos flectores para los tramos AC (Ec. D.23) y CB (Ec. D.24) y de esfuerzos cortantes para los tramos AC y CB (Ec. D.25 y Ec. D.26). M AC Px 3PL x 2 16 L → M AC 5Px 16 (Ec. D.23) Anexos A, B, C, D, E y F M CB T AC P L x 3PL x → 2 16 L P 3PL 2 L TCB Pág. 113 P 3PL 2 L → → M CB P 8 L 11x 16 (Ec. D.24) T AC 5P 16 (Ec. D.25) TCB 11P 16 (Ec. D.26) DEC DEF Ecuación de la elástica Se obtiene la ecuación de la elástica en AC, Ec. D.27, y en CB, Ec. D.28. 3PLx L2 x 2 16 6 LEI w AC x PL2 4 x 2 1 16 EI 3L2 wCB x 2 PL2 L x 4L x 3PLx L2 x 2 1 16 EI 16 6 LEI 3L2 wCB ( x) L x PLL x 9 11 96 EI L → w AC ( x) PL2 x 5x 2 3 2 96 EI L (Ec. D.27) → 2 (Ec. D.28) Ángulos de giro y flecha El ángulo de giro en la sección A, Ec. D.29, también se obtiene por superposición. A PL2 3PL L 16 EI 16 6 EI → A PL2 32 EI (Ec. D.29) Pág. 114 Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 Para obtener el ángulo de giro en C, Ec. D.30, se evalua en la sección L/2 la ecuación de la derivada de la elástica. w x 2 L PL2 15 L 3 2 x 2 96 EI L 2 AC → C PL2 128 EI (Ec. D.30) Para obtener el valor de la sección donde la flecha es máxima, se iguala a cero la ecuación de la derivada de la elástica, Ec. D.31. w x AC PL2 15 x 2 3 2 0 96 EI L → 3L2 15 x 2 0 → x L (Ec. D.31) 5 Substituyendo este valor en la ecuación de la elástica, Ec. D.28, se obtiene el valor máximo de flecha, Ec. D.32. 2 L PL2 L 5 L → 3 2 máx w AC L 5 5 96 EI 5 máx PL3 48 5 EI máx P L 5 L2 3 2 96 EI 5 L 5 (Ec. D.32) Anexos A, B, C, D, E y F Pág. 115 D.3 Viga apoyada y empotrada con dos cargas puntuales P P = D C A B RA RB a a L P P MB + A B RAi R Bi A B M B /L MB/L Fig. D.4 Superposición de viga apoyada y empotrada con dos carga puntuales Se obtienen el momento en la sección B a partir de la Ec. D.1 y por superposición (Ec. D.33). B Bi M BL 3EI → Pa L a M B L 0 → 2 EI 3EI MB 3PaL a 2L (Ec. D.33) Reacciones Una vez obtenido el valor de MB, y a partir de las Ec. D.2 y Ec. D.3 se obtienen los valores de las reacciones (Ec. D.34 y Ec. D.35). RA P 3Pa L a 1 2L L → 3PaL a 1 RB P 2L L RA P → 2 L2 3a 2 3aL 2 L2 RB P 2 L2 3a 2 3aL 2 L2 (Ec. D.34) (Ec. D.35) Diagramas de esfuerzos cortantes y momento flector También se obtienen la ley de momentos flectores para los tramos AC (Ec. D.36), CD (Ec. D.37) y CB (Ec. D.38) y de esfuerzos cortantes para los tramos AC (Ec. D.39) y CD (Ec. D.40) y CB (Ec. D.41). M AC Px 3Pa L a x 2L L → M AC P 2 L2 3a 2 3aL x 2 L2 (Ec. D.36) Pág. 116 Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 M CD Pa 3Pa L a x 3a a L x a → M CD P 2 2L L 2L M DB P L x T AC P TCD 3Pa L a x 2L L (Ec. D.37) 3a 2 3aL 2 L2 x L 2 2L → M DB P 3Pa L a 1 2 L2 3a 2 3aL → T AC R A P 2L L 2 L2 3Pa L a 1 2L L TDB P (Ec. D.38) (Ec. D.39) (Ec. D.40) 3Pa L a 1 2 L2 3a 2 3aL → TDB RB P 2L L 2 L2 (Ec. D.41) DEC DEF Ecuación de la elástica Se obtiene la ecuación de la elástica en AC, Ec. D.42, en CD, Ec. D.43, y en DB, Ec. D.44. wAC x Px 3PaL a x L2 x 2 3aL 3a 2 x 2 6 EI 2L 6 LEI w AC ( x) Px 3aL 3a 2 2 L2 x 2 3aL3 3a 2 L2 12 L2 EI wCD ( x) Pa 3PaL a x L2 x 2 3Lx 3x 2 a 2 6 EI 2L 6 LEI wCD ( x) Pa 3L a x 3 6 L2 x 2 3L2 L a x 2 L2 a 2 12 L2 EI → (Ec. D.42) → (Ec. D.43) Anexos A, B, C, D, E y F Pág. 117 wDB x P L x 3PaL a x L2 x 2 2 → 3aL 3a 2 L x 6 EI 2L 6 LEI wDB ( x) P L x 12 L2 EI 2 3a 2 3aL 2 L2 x 2 L 3a 2 3aL L2 (Ec. D.44) Ángulos de giro y flecha El ángulo de giro en la sección A, Ec. D.45, también se obtiene por superposición. A Pa ( L a ) 3Pa L a L 2 EI 2L 6 EI → A Pa L a 4 EI (Ec. D.45) Para obtener el valor de la sección donde la flecha es máxima, se iguala a cero la ecuación de la derivada de la elástica, Ec. D.46. w Pa 9L a x 2 12 L2 x 3L2 L a 0 → x CD 12 L2 EI 9L a x 2 12 L2 x 3L2 L a 0 → x 2 L2 L L2 3a 2 3L a (Ec. D.46) Pág. 118 Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 D.4 Viga apoyada y empotrada con carga repartida p = A B RA RB L p MB + A B RA i R Bi A B M B/ L M B /L Fig. D.5 Superposición de viga apoyada y empotrada con carga repartida Se obtienen el momento en la sección B a partir de la Ec. D.1 y por superposición (Ec. D.47). B Bi M BL 3EI → pL3 M B L pL2 0 → MB 24 EI 3EI 8 (Ec. D.47) Reacciones Una vez obtenido el valor de MB, y a partir de las Ec. D.2 y Ec. D.3 se obtienen los valores de las reacciones (Ec. D.48 y Ec. D.49). RA 3 pL pL pL2 1 → RA 8 2 8 L (Ec. D.48) RB 5 pL pL pL2 1 → RB 8 2 8 L (Ec. D.49) Diagramas de esfuerzos cortantes y momento flector También se obtienen la ley de momentos flectores (Ec. D.50) y esfuerzos cortantes (Ec. D.51). M AB px pxL x pL2 x 3L 4 x → M AB 8 2 8 L 2 L pL 1 TAB p x 8 L 2 3 x 8 L → T AB pL (Ec. D.50) (Ec. D.51) Anexos A, B, C, D, E y F Pág. 119 DEC DEF Ecuación de la elástica Se obtiene la ecuación de la elástica en AB, Ec. D.52. wAB x px pL2 x L2 x 2 x 3 2 Lx 2 L3 24 EI 8 6 LEI w AB ( x ) px L 2 x L x 2 48 EI → (Ec. D.52) Ángulos de giro y flecha El ángulo de giro en la sección A, Ec. D.53, también se obtiene por superposición. A pL3 pL2 L pL3 → A 48EI 24 EI 8 6 EI (Ec. D.53) Para obtener el valor de la sección donde la flecha es máxima, se iguala a cero la ecuación de la derivada de la elástica, Ec. D.54. w x AB p 2 x 4 3Lx 3 L3 x 0 → 2 x 4 3Lx 3 L3 x 0 → 48EI x 2 2 x 3L L3 0 1 33 (Ec. D.54) L 16 Substituyendo este valor en la ecuación de la elástica se obtiene el valor máximo de flecha, → x Ec. D.55. 1 33 1 33 p 1 33 L 1 33 L → máx w AB x L L L 2 L 16 16 16 48EI 16 máx pL4 185EI (Ec. D.55) Pág. 120 Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 D.5 Viga apoyada y empotrada con carga repartida en un tramo c p = D C A RA B RB a b L p MB + A B RA i R Bi A B M B /L M B/ L Fig. D.6 Superposición de viga apoyada y empotrada con carga repartida en un tramo Se obtienen el momento en la sección B a partir de la Ec. D.1 y por superposición (Ec. D.56). B Bi MB M BL 3EI → pabc c2 M L L a B 0 → 6 LEI 4b 3EI pabc c2 L a 4b 2 L2 (Ec. D.56) Reacciones Una vez obtenido el valor de MB, y a partir de las Ec. D.2 y Ec. D.3 se obtienen los valores de las reacciones (Ec. D.57 y Ec. D.58). RA pbc pabc c2 1 L a L 4b L 2 L2 RB pbc pabc c 2 1 pbc pabc c2 L a → R L a B L 2 L2 4b L L 4b 2 L3 → RA pbc pabc c2 L a L 4b 2 L3 (Ec. D.57) (Ec. D.58) Anexos A, B, C, D, E y F Pág. 121 Diagramas de esfuerzos cortantes y momento flector También se obtienen la ley de momentos flectores para los tramos AC (Ec. D.59), CD (Ec. D.60) y CB (Ec. D.61) y de esfuerzos cortantes para los tramos AC (Ec. D.62) y CD (Ec. D.63) y CB (Ec. D.64). M AC 2 L2 3a 2 3aL pbcx pabc c2 x M P x → L a AC L 4b L 2 L2 2 L2 (Ec. D.59) 2 M CD pbcx p c pabc c2 x x a L a L 2 2 4b L 2 L2 → 3a a L x M CD P a 2 2L M DB (Ec. D.60) pac c2 x L x pabc → L a L 4b L 2 L2 3a 2 3aL 2 L2 M DB P x L 2 2L (Ec. D.61) TAC pbc pabc c2 1 L a L 4b L 2 L2 → TAC R A (Ec. D.62) TCD c pbc c2 1 c pabc p a x L a → TCD R A p x a 2 2 L 4b L 2 2L (Ec. D.63) TDB DEC DEF pac pabc c2 1 → L a L 4b L 2 L2 TDB RB (Ec. D.64) Pág. 122 Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 Ecuación de la elástica Se obtiene la ecuación de la elástica en AC, CD y DB (Ec. D.65, Ec. D.66, y Ec. D.67). 2 c 2 pabc c 2 x L2 x 2 L a x a L b 2 6 LEI 4 a 4 b 2 L w AC x pbcx 6 LEI w AC ( x) x 12ab 2 2 3 8R A Lx pc L 3b 48 LEI c2 → (Ec. D.65) 4 p c c 2 pabc c 2 x L2 x 2 L x a 4bcx 3 4abc L b x wCD ( x) L a 24 LEI 2 4a 2 L2 4b 6 LEI 4 1 c 12ab 2 3 3 x wCD ( x) 8R A Lx 2 pL x a pc L 3b 48LEI 2 c 2 wDB x pac( L x) c 2 pabc c 2 x L2 x 2 2 L a ( L x) b L a 6 LEI 4a 2 L2 4b 6 LEI wDB ( x) (Ec. D.66) → L x 2 R L x 3M B B (Ec. D.67) 6 EI Ángulos de giro El ángulo de giro en la sección A (Ec. D.68) también se obtiene por superposición. A pabc c 2 pabc c2 L pc 3 Lb L a → A 6 LEI 4a 2 L2 4b 6 EI 48LEI 12ab 2 L 3b c2 (Ec. D.68) Anexos A, B, C, D, E y F Pág. 123 D.6 Viga apoyada y empotrada con carga repartida creciente p = A B RA RB L p MB + A B RAi RBi A B MB/L MB/L Fig. D.7 Superposición de viga apoyada y empotrada con carga puntual en creciente Se obtienen el momento en la sección B a partir de la Ec. D.1 y por superposición (Ec. D.69). B Bi M BL 3EI → pL3 M B L pL2 0 → MB 45EI 3EI 15 (Ec. D.69) Reacciones Una vez obtenido el valor de MB, y a partir de las Ec. D.2 y Ec. D.3 se obtienen los valores de las reacciones (Ec. D.70 y Ec. D.71). RA pL pL pL2 1 → RA 10 6 15 L RB pL pL2 1 → 2 15 L (Ec. D.70) RB 4 pL 10 (Ec. D.71) Diagramas de esfuerzos cortantes y momento flector También se obtienen la ley de momentos flectores (Ec. D.72) y esfuerzos cortantes (Ec. D.73). M AB TAB pLx x 2 pL2 x 1 6 L2 15 L pL 3x 2 1 2 6 L pL2 1 15 L → M AB → TAB px 3L2 5 x 2 30 L pL px 2 10 2 L (Ec. D.72) (Ec. D.73) Pág. 124 Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 DEC DEF Ecuación de la elástica Se obtiene la ecuación de la elástica en AB, Ec. D.74. w AB x pL3 x 10 x 2 3x 4 pL2 x L2 x 2 7 2 4 360 EI 6 LEI L L 15 → w AB ( x ) px L2 x 2 120 LEI 2 (Ec. D.74) Ángulos de giro y flecha El ángulo de giro en la sección A, Ec. D.75, también se obtiene por superposición. 7 pL3 pL2 L pL3 → A (Ec. D.75) 360 EI 15 6 EI 120 EI Para obtener el valor de la sección donde la flecha es máxima, se iguala a cero la ecuación A de la derivada de la elástica, Ec. D.76. w x AB Cambio de variable: y L2 5 p 5 x 4 6 L2 x 2 L4 0 120 LEI 4 2 2 4 → 5x 6L x L 0 → y x 2 ; y 2 x 4 → 5 y 2 6 L2 y L4 0 → x Deshaciendo el cambio de variable: L (Ec. D.76) 5 Substituyendo este valor en la ecuación de la elástica, Ec. D.74, se obtiene el valor máximo de flecha, Ec. D.77. máx 2 L p L 2 L w AB x L 5 120 LEI 5 5 2 → máx 2 pL4 375 5 EI (Ec. D.77) Anexos A, B, C, D, E y F Pág. 125 D.7 Viga apoyada y empotrada con carga repartida creciente en el extremo del apoyo p = C A B RA RB a b L p MB + A B R Ai R Bi A B MB/L M B/ L Fig. D.8 Superposición de viga apoyada y empotrada con carga repartida creciente en el extremo del apoyo Se obtienen el momento en la sección B a partir de la Ec. D.1 y por superposición (Ec. D.78). B Bi M BL 3EI → pa 2 L 3a 2 1 18EI 5L2 M BL pa 2 4a M 0 → 1 B 3EI 4 L 5L (Ec. D.78) Reacciones Una vez obtenido el valor de MB, y a partir de las Ec. D.2 y Ec. D.3 se obtienen los valores de las reacciones (Ec. D.79 y Ec. D.80). RA pa(3L 2a) pa 2 4a 1 pa(3L 2a) M B 1 6L 4 L 5L L 6L L (Ec. D.79) RB pa 2 pa 2 4a 1 pa 2 M B 1 3L 4 L 5L L 3L L (Ec. D.80) Diagramas de esfuerzos cortantes y momento flector También se obtienen la ley de momentos flectores para los tramos AC (Ec. D.81) y CB (Ec. D.82), y de esfuerzos cortantes para los tramos AC (Ec. D.83) y CB (Ec. D.84). M AC px 2a 2 3a 6 L x 2 pa 2 4a x 1 a 4 L 5 L L → M AC R A x px 3 6a (Ec. D.81) Pág. 126 pa 2 x pa 2 4a x 1 1 3 L 4 L 5L L M CB TAC Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 pa(3L 2a) px 2 pa 2 6L 2a 4L TCB M CB RB L x M B → 4a 1 1 5L L → TAC R A px 2 2a (Ec. D.82) (Ec. D.83) pa 2 pa 2 4a 1 1 RB 3L 4 L 5L L (Ec. D.84) DEC DEF Ecuación de la elástica Se obtiene la ecuación de la elástica en AC, Ec. D.85, y CB, Ec. D.86. px pa 2 4a x L2 x 2 3Lx 4 10(3L 2a)a 2 x 2 a 3 (40 L2 45aL 12a 2 ) 1 360aLEI 4 L 5L 6 LEI x w AC ( x) pLx 4 20 R A aLx 2 pa 3 10 L2 15aL 6a 2 (Ec. D.85) 120 LEI w AC x wBC x wCB ( x) pa 2 ( L x) 3a 2 2 2 ( L x) L 1 2 18 LEI 5L pa 2 4a x L2 x 2 1 4 L 5 L 6 LEI L x 2 R L x 3M B B 6 EI (Ec. D.86) Ángulos de giro El ángulo de giro en la sección A, Ec. D.87, también se obtiene por superposición. A pa 2 pa 2 4a L 40 L2 45aL 12a 2 → 1 360 LEI 4 L 5L 6 EI A pa 2 10 L2 15aL 6a 2 120 LEI (Ec. D.87) Anexos A, B, C, D, E y F D.8 Viga Pág. 127 apoyada y empotrada con carga repartida decreciente p = A B RA RB L p MB + A B RA i RB i A B MB/L MB/L Fig. D.9 Superposición de viga apoyada y empotrada con carga repartida decreciente Se obtienen el momento en la sección B a partir de la Ec. D.1 y por superposición (Ec. D.88). B Bi M BL 3EI → 7 pL3 M B L 0 → 360 EI 3EI MB 7 pL2 120 (Ec. D.88) Reacciones Una vez obtenido el valor de MB, y a partir de las Ec. D.2 y Ec. D.3 se obtienen los valores de las reacciones (Ec. D.89 y Ec. D.90). RA pL 7 pL2 1 3 120 L RB 9 pL pL 7 pL2 1 → RB 40 6 120 L → RA 11pL 40 (Ec. D.89) (Ec. D.90) Diagramas de esfuerzos cortantes y momento flector También se obtienen la ley de momentos flectores (Ec. D.91) y esfuerzos cortantes (Ec. D.92). Pág. 128 M AB TAB Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 pLx x 2 7 pL2 x 1 6 L2 120 L pL 3x 2 1 2 6 L 7 pL2 1 120 L → → M AB T AC pL2 120 3 Lx Lx 27 20 7 L L p 20 x 2 40 xL 11L2 40 L (Ec. D.91) (Ec. D.92) DEC DEF Ecuación de la elástica Se obtiene la ecuación de la elástica en AB, Ec. D.93. wAB x w AB ( x) pLx 3 px 4 px 5 pL3 x 7 pL2 x L2 x 2 18EI 24 EI 120 LEI 45EI 120 6 LEI pxL x 2L x 2 LL x 7 L2 240 LEI → (Ec. D.93) Ángulos de giro El ángulo de giro en la sección A, Ec. D.94, también se obtiene por superposición. A pL3 7 pL2 L 45EI 120 6 EI → A pL3 80 EI (Ec. D.94) Anexos A, B, C, D, E y F D.9 Viga Pág. 129 apoyada y empotrada con carga repartida decreciente en el extremo del apoyo p = C A B RA RB a b L p MB + A B RA i RB i A B Fig. D.10 Superposición de viga apoyada y empotrada con carga repartida decreciente en el extremo del apoyo Se obtienen el momento en la sección B a partir de la Ec. D.1 y por superposición (Ec. D.95). B Bi M BL pa 2 L 3a 2 1 → 3EI 36 EI 10 L2 M BL pa 2 3a 2 → 0 M 1 B 3EI 12 10 L2 (Ec. D.95) Reacciones Una vez obtenido el valor de MB, y a partir de las Ec. D.2 y Ec. D.3 se obtienen los valores de las reacciones (Ec. D.96 y Ec. D.97). RA pa (3L a) pa 2 3a 2 1 6L 12 10 L2 RB pa 2 pa 2 3a 2 1 6 L 12 10 L2 1 L 1 L → → RA RB pa 3L a M B 6L L pa 2 M B 6L L (Ec. D.96) (Ec. D.97) Diagramas de esfuerzos cortantes y momento flector También se obtienen la ley de momentos flectores para los tramos AC (Ec. D.98) y CB (Ec. D.99), y de esfuerzos cortantes para los tramos AC (Ec. D.100) y CB (Ec. D.101). Pág. 130 M AC Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 px a2 3 a 6 L M AC R A x p pa 2 6 M CB TAC pa 2 x 3a 2 3a x 1 2 a 12 10 L x2 3a x 6a (Ec. D.98) x pa 2 3a 2 1 1 2 L 12 10 L x L → M CB RB L x M B pa(3L a) x pa 2 3a 2 1 px1 2 6L 2a 12 10 L TCB x → L pa 2 pa 2 3a 2 1 6L 12 10 L2 1 L → (Ec. D.99) x T AC R A px1 2a (Ec. D.100) 1 RB L (Ec. D.101) DEC DEF Ecuación de la elástica Se obtiene la ecuación de la elástica en AC, Ec. D.102, y CB, Ec. D.103. px 3Lx 4 15aLx 3 10a 2 (3L a) a 3 (20 L2 15aL 3a 2 ) 360aEI pa 2 3a 2 x L2 x 2 1 12 10 L2 6 LEI wAC ( x) → w AC ( x) x 2 pLx 4 10 paLx 3 40 R A aLx 2 pa 3 10 L2 10aL 3a 2 240aLEI wCB ( x) pa 2 ( L x) 2 pa 2 3a 2 x L2 x 2 1 10( L x) 2 10 L2 3a 2 360 LEI 12 10 L2 6 LEI 2 L x RB L x 3M B wCB ( x) 6 EI (Ec. D.102) → (Ec. D.103) Anexos A, B, C, D, E y F Pág. 131 Ángulos de giro El ángulo de giro en la sección A, Ec. D.104, también se obtiene por superposición. A pa 2 pa 2 3a 2 1 20 L2 3a 2 15aL 360 LEI 12 10 L2 A pa 2 10 L2 10aL 3a 2 240 LEI L 6 EI → (Ec. D.104) Pág. 132 Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 D.10 Viga apoyada y empotrada con carga repartida decreciente en el extremo del empotramiento p = C A B RA RB a b L p MB + A B RAi RB i A B M B /L MB/L Fig D.11 Superposición de viga apoyada y empotrada con carga repartida decreciente en el extremo del empotramiento Se obtienen el momento en la sección B a partir de la Ec. D.1 y por superposición (Ec. D.105). B Bi MB M BL 3EI → M L pb 2 40 L2 45bL 12b 2 B 0 → 360 LEI 3EI pb 2 40 L2 45bL 12b 2 2 120 L (Ec. D.105) Reacciones Una vez obtenido el valor de MB, y a partir de las Ec. D.2 y Ec. D.3 se obtienen los valores de las reacciones (Ec. D.106 y Ec. D.107). RA pb 2 pb 2 1 40 L2 45bL 12b 2 2 3L 120 L L RB pb(3L 2b) pb 2 1 40 L2 45bL 12b 2 2 6L L 120 L (Ec. D.106) (Ec. D.107) Diagramas de esfuerzos cortantes y momento flector También se obtienen la ley de momentos flectores para los tramos AC (Ec. D.108) y CB (Ec. D.109), y de esfuerzos cortantes para los tramos AC (Ec. D.110) y CB (Ec. D.111). Anexos A, B, C, D, E y F Pág. 133 M AC pb 2 L x pb 2 x 40 L2 45bL 12b 2 RA x → 1 2 3 L 120 L L M CB pL x 2b 2 L x 3 b 6 L b 2 M CB R A x p T AC 2 pb 40 L2 45bL 12b 2 x → 120 L2 L 2b L x x a 2 (Ec. D.109) 6b pb 2 pb 2 1 40 L2 45bL 12b 2 RA 2 3L 120 L L (Ec. D.110) pb(3L 2b) p L x pb 2 1 ` 40 L2 45bL 12b 2 2 6L 2b L 120 L 2 TCB (Ec. D.108) TCB R A p → b L x x a (Ec. D.111) 2b DEC DEF Ecuación de la elástica Se obtiene la ecuación de la elástica en AC, Ec. D.112, y CB, Ec. D.113. w AC ( x) pb 2 x 2 3b 2 2 x L 1 2 18 LEI 5L 2 2 pb 2 2 2 x L x 40 L 45 bL 12 b 120 L2 6 LEI → w AC ( x) x 40 R A Lx 2 3 pb 3 5 L 4b 240 LEI wCB ( x) p L x 4 2 3LL x 10(3L 2b)b 2 L x b 3 ( 40 L2 45bL 12b 2 ) 360bLEI 2 2 pb 2 2 2 x L x 40 L 45 bL 12 b 6 LEI 120 L2 wCB ( x) (Ec. D.112) → 1 5 2 pLx a 10 pbL x a 4 40 R A bLx 3 3 pb 4 5 L 4b x 240bLEI (Ec. D.113) Pág. 134 Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 Ángulos de giro El ángulo de giro en la sección A, Ec. D.114, también se obtiene por superposición. A pb 2 L 3b 2 1 18EI 5L2 A pb3 16 LEI pb 2 L 2 2 120 L2 40 L 45bL 12b 6 EI → 4b L 5 (Ec. D.114) Anexos A, B, C, D, E y F Pág. 135 D.11 Viga apoyada y empotrada con carga repartida decreciente y decreciente p = C A B RA RB a b L p MB + A B RA i R Bi A B M B /L M B/ L Fig. D.12 Superposición de viga apoyada y empotrada con carga repartida creciente y decreciente Se obtienen el momento en la sección B a partir de la Ec. D.1 y por superposición (Ec. D.115). B Bi MB M BL M L p( L a) (7 L2 3a 2 ) B 0 → → 3EI 360 EI 3EI p L a 2 7 L 3a 2 120 L (Ec. D.115) Reacciones Una vez obtenido el valor de MB, y a partir de las Ec. D.2 y Ec. D.3 se obtienen los valores de las reacciones (Ec. D.116 y Ec. D.117). RA M p p L a 2 1 p ( L b) 7 L 3a 2 → R A L b B 6 120 L L 6 L (Ec. D.116) RB p p L a 2 1 ( L a) 7 L 3a 2 6 120 L L (Ec. D.117) → RB p L a M B 6 L Pág. 136 Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 Diagramas de esfuerzos cortantes y momento flector También se obtienen la ley de momentos flectores para los tramos AC (Ec. D.118) y CB (Ec. D.119), y de esfuerzos cortantes para los tramos AC (Ec. D.120) y CB (Ec. D.121). M AC p px 3 pL a 2 x → (2 L a) x 7 L 3a 2 6 6a 120 L L M AC R A x p x3 6a (Ec. D.118) p p ( L x ) 3 p L a 2 x ( L a)( L x) 7 L 3a 2 6 6b 120 L L M CB M CB RB L x M B TAC → p L x 6b 3 (Ec. D.119) p px 2 pL a 2 1 ( L b) 7 L 3a 2 6 2a 120 L L TCB TAC RA px 2 2a (Ec. D.120) p p p L a 2 1 ( L a) ( L x) 2 7 L 3a 2 6 2b 120 L L TCB RB p L x 2b 2 (Ec. D.121) DEC DEF Ecuación de la elástica Se obtiene la ecuación de la elástica en AC, Ec. D.122, y CB, Ec. D.123. 2 2 p L a 2 3 4 2 2 2 2 x L x x 10 ( L b ) x ( L b )( 7 L 3 b ) 7 L 3 a a 120 L 6 LEI w AC ( x) px 360 EI w AC ( x) x 2 px 4 40 R A ax 2 pa 3L3 3aL2 7 a 2 L 3a 3 240aEI → (Ec. D.122) Anexos A, B, C, D, E y F wCB ( x) Pág. 137 p( L x) 3 ( L x) 4 10( L a )( L x) 2 ( L a )(7 L2 3a 2 ) 360 EI b p L a 2 x L2 x 2 7 L 3a 2 120 L 6 LEI → 2 L x pL x3 20RBbL x 60M Bb wCB ( x) (Ec. D.123) 120bEI Ángulos de giro El ángulo de giro en la sección A, Ec. D.124, también se obtiene por superposición. A p ( L b) p L a 2 L (7 L2 3b 2 ) 7 L 3a 2 360 EI 120 L 6 EI A pa 2 3 7 2 2 2 L aL a L a 80 EI 3 → (Ec. D.124) Pág. 138 Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 D.12 Viga apoyada y empotrada con carga repartida decreciente p1 y p2 p2 p1 = A B RA RB L p1 MB + A B RA i RBi A B MB/L MB/L Fig. D.13 Superposición de viga apoyada y empotrada con carga repartida decreciente Se obtienen el momento en la sección B a partir de la Ec. D.1 y por superposición (Ec. D.125). B Bi M BL L3 (7 p1 8 p2 ) M B L L2 → 7 p1 8 p2 0 → MB 3EI 360 EI 3EI 120 (Ec. D.125) Reacciones Una vez obtenido el valor de MB, y a partir de las Ec. D.2 y Ec. D.3 se obtienen los valores de las reacciones (Ec. D.126 y Ec. D.127). RA L(2 p1 p2 ) L2 7 p1 8 p2 1 → R A L 2 p1 p 2 M B 6 L 6 120 L (Ec. D.126) RB L( p1 2 p 2 ) L2 7 p1 8 p2 1 6 120 L (Ec. D.127) → RB L p1 2 p 2 M B 6 L Diagramas de esfuerzos cortantes y momento flector También se obtienen la ley de momentos flectores (Ec. D.128) y esfuerzos cortantes (Ec. D.129). Anexos A, B, C, D, E y F M AB L(2 p1 p2 ) x p1 (3L x) p2 x 2 L2 7 p1 8 p2 x → x 6 6L 120 L M AB R A x TAB Pág. 139 p1 3L x p 2 x 2 x 6L (Ec. D.128) L(2 p1 p2 ) p1 (2 L x) p2 x L2 7 p1 8 p2 x x 6 2L L 120 → L2 7 p1 8 p2 x 120 L (Ec. D.129) DEC DEF Ecuación de la elástica Se obtiene la ecuación de la elástica en AB, Ec. D.130. w AB x x( L x) 3( p1 p 2 ) x 3 3(4 p1 p 2 ) Lx 2 (8 p1 7 p 2 ) L2 x (8 p1 7 p 2 ) L3 ) 360 LEI 2 2 L2 7 p1 8 p2 x L x 120 6 LEI w AB ( x) → 2 x p2 p1 x 4 5Lp1 x 3 20 R A Lx 2 5L 12 R A L 3 p1 p2 L3 120 LEI (Ec. D.130) Ángulos de giro y flecha El ángulo de giro en la sección A, Ec. D.131, también se obtiene por superposición. A L3 (8 p1 7 p2 ) L2 7 p1 8 p2 L 360 EI 120 6 EI → A L3 3 p1 2 p2 240 EI (Ec. D.131) Pág. 140 Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 D.13 Viga apoyada y empotrada con momento aplicado en una sección M = C A B RA RB a b L M MB + A B R Ai RB i A B Fig. D.14 Superposición de viga apoyada y empotrada con momento aplicado en una sección Se obtienen el momento en la sección B a partir de la Ec. D.1 y por superposición (Ec. D.132). B Bi M L M BL M ML a 2 3 2 1 B 0 → M B 2 L2 3a 2 → 3EI 3EI 6 EI L 2L (Ec. D.132) Reacciones Una vez obtenido el valor de MB, y a partir de las Ec. D.2 y Ec. D.3 se obtienen los valores de las reacciones (Ec. D.133 y Ec. D.134). RA M M 1 2 L2 3a 2 L 2L L RB RA → M M 1 2 L2 3a 2 L 2L L → 3M 2 L a2 3 2L RB 3M 2 L a2 2 L3 (Ec. D.133) (Ec. D.134) Diagramas de esfuerzos cortantes y momento flector También se obtienen la ley de momentos flectores para los tramos AC (Ec. D.135) y CB (Ec. D.136), y de esfuerzos cortantes para el tramo AB (Ec. D.137). M AC Mx M 2 x L 3a 2 L 2 L2 L → M AC 3Mx 2 L a 2 RA x 3 2L (Ec. D.135) Anexos A, B, C, D, E y F M CB TAB Pág. 141 M M x ( L x) 2 L2 3a 2 L L 2L → M CB M 2 3x a 2 1 2 L L 2 M M 1 2 L2 3a 2 RA L 2L L (Ec. D.136) (Ec. D.137) DEC DEF Ecuación de la elástica Se obtiene la ecuación de la elástica en AC, Ec. D.138, y CB, Ec. D.139. w AC ( x) MLx b2 x2 M x L2 x 2 1 3 2 2 2 L2 3a 2 6 EI 6 LEI L L 2 L w AC ( x) Mbx 4 L3 x 2 3L2 a L 4 L3 EI wCB ( x) wCB ( x) 2 2a L xL 2 2 → ML( L x) a2 L x 1 3 2 6 EI L L M L x 4 L3 EI a2 2 (Ec. D.138) 2 2 M 2 2 x L x L 3 a 2 L2 6 LEI → (Ec. D.139) Ángulos de giro El ángulo de giro en la sección A, Ec. D.140, y en la sección C, Ec. D.141, también se obtiene por superposición. A M ML 3b 2 L 2 1 2 L2 3a 2 6 EI L 6 EI 2L C Mb M M L → C (a3 b3 ) 2 L2 3a 2 2 4 EI 3L EI 2L 6 EI → A M L a 3a L 4 LEI 3b a 2 1 4 L L (Ec. D.140) (Ec. D.141) Pág. 142 Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 E. Análisis de vigas biempotradas Las vigas empotradas son vigas hiperestáticas, de 4 incógnitas, dos en cada empotramiento. Por tanto es un sistema hiperestático de segundo grado, son cuatro incógnitas y dos ecuaciones de equilibrio. Por tratarse de estructuras hiperestáticas, además de utilizar las ecuaciones de equilibrio, se han de considerar las ecuaciones de compatibilidad de las deformaciones. Los métodos para calcular las vigas empotradas también son los mismos que en las vigas articuladas y empotradas. El formulario se ha realizado aplicando el método basado en los teoremas de Mohr, y el método de superposición. En el caso de vigas empotradas se han elegido como incógnitas superfluas MA y MB, y se ha aplicado el método de superposición como muestra la siguiente figura (Fig. E.1). = A B RA RB + A B RA i R Bi MA MB A B (MB-MA)/L (MB-MA)/L Fig. E.1 Superposición de viga biempotrada Por tratarse de empotramientos perfectos el ángulo de giro y de desplazamiento en los extremos es nulo. El área del diagrama de momentos flectores isostáticos es igual en valor absoluto al de momentos hiperestáticos. Por tanto el ángulo de giro en la sección A es el mismo, en módulo, para la viga isostática que para la hiperestática, lo mismo ocurre en la sección B (Ec. E.1). A partir de estas igualdades se obtienen los valores de los momentos en el empotramiento, MA y MB. En la práctica, a la hora de realizar los cálculos para preparar el prontuario se ha usado esta condición de ángulos de giro. A Ai L 2M A M B 6 EI B Bi L M A 2M B 6 EI (Ec. E.1) Anexos A, B, C, D, E y F Pág. 143 Obtenido el valor de M A y MB por superposición se obtienen las reacciones en A y en B (Ec. E.2 y Ec. E.3), la ley de momentos flectores y de esfuerzos cortantes (Ec. E.4 y Ec. E.5), y la ecuación de la elástica y de su derivada (Ec. E.6 y Ec. E.7). R A R Ai MB MA L (Ec. E.2) RB RBi MB MA L (Ec. E.3) M Mi M A MB MA x L (Ec. E.4) T Ti MB MA L (Ec. E.5) w wi Lx x x 1 2M A M B M B M A 6 EI L L (Ec. E.6) w' wi' 2 L x x 2M A M B 3M A M B 6M A 6 EI L L (Ec. E.7) Pág. 144 Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 E.1 Viga biempotrada con carga puntual en una sección de la viga P = C A B RA RB a b L P + A B RA i RB i MA MB A B (MB-MA)/L (MB-MA)/L Fig. E.2 Superposición de viga biempotrada con una carga puntual Se aplica la condición de igualdad de ángulos en los dos extremos (Ec. E.8 y Ec. E.9), obteniendo dos ecuaciones con dos incógnitas. PabL b L2 M A M B 0 → Pab L b L2 2 M A M B 0 6 LEI 6 EI PabL a LM A 2 M B 0 → Pab L a L2 M A 2 M B 0 6 LEI 6 EI (Ec. E.8) (Ec. E.9) Solucionando el sistema de ecuaciones (se resta el doble de la primera ecuación de la segunda) se obtienen los valores del momento en A (Ec. E.10) y en B (Ec. E.11). PabL a 2 PabL b 3L2 M A → M A Pab 2 L2 M B PabL b 2 L2 2 L → Pab 2 L2 MB Pa 2 b L2 (Ec. E.10) (Ec. E.11) Anexos A, B, C, D, E y F Pág. 145 Reacciones Una vez obtenido el valor de MA y MB, y a partir de las Ec. E.2 y Ec. E.3 se obtienen los valores de las reacciones (Ec. E.12 y Ec. E.13). RA Pb Pa 2 b Pab 2 1 Pb 2 2 2 → R A 3 L 2 a L L L L L (Ec. E.12) RB Pa Pa 2 b Pab 2 1 2 2 → L L L L (Ec. E.13) RB Pa 2 L 2b L3 Diagramas de esfuerzos cortantes y momento flector También se obtienen la ley de momentos flectores para los tramos AC (Ec. E.14) y CB (Ec. E.15), y de esfuerzos cortantes para el tramo AC (Ec. E.16) y CB (Ec. E.17). M AC Pbx Pab 2 x Pa 2 b x 2 1 2 → L L L L L M CB Pa 2 PaL x Pab 2 x Pa 2 b x 2 1 2 → M CB 3 ( Lb L2 Lx 2bx ) L L L L L L T AC Pb Pa 2 b Pab 2 1 2 2 RA L L L L TCB DEC DEF Pa Pa 2 b Pab 2 1 2 2 RB L L L L M AC Pb 2 ( Lx 2ax aL) L3 (Ec. E.14) (Ec. E.15) (Ec. E.16) (Ec. E.17) Pág. 146 Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 Ecuación de la elástica Se obtiene la ecuación de la elástica en AC, Ec. E.18, y CB, Ec. E.19. Lx 6 EI x Pab 2 Pa 2 b Pab 2 Pa 2 b x 1 2 2 2 2 → L L2 L L L L w AC ( x) PLbx b 2 x 2 1 6 EI L2 L2 w AC ( x) Pb 2 x 2 2ax 3a x 2 L 6 L EI wCB ( x) 2 PLa ( L x) a 2 L x Lx x 2 Pab 2 Pa 2 b Pab 2 Pa 2 b x 1 2 L L 6 EI 1 L L2 L2 L2 L2 L 6 EI wCB ( x) Pa 2 ( L x) 2 6 L2 EI (Ec. E.18) 2b( L x) 3b ( L x) L (Ec. E.19) Flecha Para obtener la flecha en la sección C, se utiliza la ecuación de la elástica y se evalúa en la distancia a, Ec. E.20. C w AC ( x a) Pb 2 a 2 6 L2 EI 2a 2 3a a L Pa 3b 3 → C w AC ( x a ) 3 3L EI (Ec. E.20) Para obtener el valor de la sección donde la flecha es máxima, se iguala a cero la ecuación de la derivada de la elástica, Ec. E.21. w x AC Pb 2 6ax 2 2 0 6 ax 3 x L 6 L2 EI 6aL x3L 6a 0 → x → 6a 3 x 6ax x 0 → L 2aL L 2a (Ec. E.21) Substituyendo este valor en la ecuación de la elástica (Ec. E.19) se obtiene el valor máximo de flecha, Ec. E.22. 2 2aL Pb 2 2aL 2aL 2a 2aL máx wAB x 2 3a → L 2 a L 2 a L 2 a L L 2a 6 L EI máx 2 Pa 3b 2 3EI L 2a 2 (Ec. E.22) Anexos A, B, C, D, E y F Pág. 147 E.2 Viga biempotrada con carga puntual en la sección central P = C A B RA RB L/2 L/2 L P + A B R Ai RB i MA MB A B (MB-MA)/L (MB-MA)/L Fig. E.3 Superposición de viga biempotrada con una carga puntual en la sección central Se aplica la condición de igualdad de ángulos en los dos extremos (Ec. E.23 y Ec. E.24), obteniendo dos ecuaciones con dos incógnitas. PL2 L2M A M B 0 16 EI 6 EI PL2 LM A 2M B 0 16 EI 6 EI → PL 1 2 M A M B 0 16 6 → PL 1 M A 2 M B 0 16 6 (Ec. E.23) (Ec. E.24) Solucionando el sistema de ecuaciones (se suma la primera ecuación y el doble de la segunda) se obtienen los valores del momento en A (Ec. E.25) y en B (Ec. E.26). PL 1 3M A 0 → 16 6 MA PL 1 PL 2M B 0 16 6 8 PL 8 (Ec. E.25) → MB PL 8 (Ec. E.26) Reacciones Una vez obtenido el valor de MA y MB, y a partir de las Ec. E.2 y Ec. E.3 se obtienen los valores de las reacciones (Ec. E.27 y Ec. E.28). RA P PL PL 1 2 8 8 L → RA P 2 (Ec. E.27) RB P PL PL 1 2 8 8 L → RB P 2 (Ec. E.28) Pág. 148 Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 Diagramas de esfuerzos cortantes y momento flector También se obtienen la ley de momentos flectores (Ec. E.29) y de esfuerzos cortantes para los tramos AC (Ec. E.30) y CB (Ec. E.31). M AC TAC PL 4 x Px PL x PL x ( 1) → M AC 1 2 8 L 8 L 8 L P PL PL 1 2 8 8 L TCB → T AC P PL PL 1 2 8 8 L P 2 → TCB (Ec. E.29) (Ec. E.30) P 2 (Ec. E.31) DEC DEF Ecuación de la elástica Se obtiene la ecuación de la elástica en AC, Ec. E.32. Lx x PL PL PL PL x 6 EI 1 L 2 8 8 8 8 L → w AC ( x) PL2 x 4 x 2 1 16 EI 3L2 w AC ( x) PLx 2 4x 3 48 EI L (Ec. E.32) Flecha Para obtener la flecha en la sección C, se utiliza la ecuación de la elástica y se evalúa en la distancia L/2, Ec. E.33. 2 C wAC ( x L PLx 2 L 4 L PL3 ) 3 → C 2 48EI 2 L 2 192 EI (Ec. E.33) Anexos A, B, C, D, E y F Pág. 149 E.3 Viga biempotrada con dos cargas puntuales P P = D C A B RA RB a c L P P + A B R Ai R Bi MA MB A B (MB-MA)/L Fig. E.4 Superposición de viga biempotrada con dos cargas puntuales Se aplica la condición de igualdad de ángulos en los dos extremos (Ec. E.34 y Ec. E.35), obteniendo dos ecuaciones con dos incógnitas. Pa ( L a ) L2 M A M B 0 2 EI 6 EI → 3Pa( L a) L2M A M B 0 Pa ( L a ) LM A 2 M B 0 → 3Pa( L a) LM A 2M B 0 2 EI 6 EI (Ec. E.34) (Ec. E.35) Solucionando el sistema de ecuaciones (se suma la primera ecuación y el doble de la segunda) se obtienen los valores del momento en A (Ec. E.36) y en B (Ec. E.37). 3PaL a 3LM B 0 → M B Pa ( L a ) L Pa ( L a ) Pa ( L a ) 3Pa ( L a ) L M A 2 0 → MA L L (Ec. E.36) (Ec. E.37) Reacciones Una vez obtenido el valor de MA y MB, y a partir de las Ec. E.2 y Ec. E.3 se obtienen los valores de las reacciones (Ec. E.38 y Ec. E.39). Pág. 150 Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 Pa( L a) Pa( L a) 1 → RA P R A P L L L (Ec. E.38) Pa( L a) Pa( L a) 1 RB P L L L (Ec. E.39) → RB P Diagramas de esfuerzos cortantes y momento flector También se obtienen la ley de momentos flectores para el tramo AC (Ec. E.40) y para el tramo CD (Ec. E.41) y de esfuerzos cortantes para los tramos AC (Ec. E.42) y CD (Ec. E.43) y DB (Ec. E.44). M AC Px Pa ( L a ) x Pa ( L a ) x 1 L L L L → M AC P Lx La a 2 L M CD Pa Pa ( L a ) x Pa ( L a ) x 1 L L L L → M CD Pa 2 L (Ec. E.40) (Ec. E.41) Pa( L a) Pa( L a) 1 TAC P L L L → TAC P (Ec. E.42) Pa( L a) Pa( L a) 1 TCD 0 L L L → TCD 0 (Ec. E.43) Pa( L a) Pa( L a) 1 TDB P L L L DEC DEF → TDB P (Ec. E.44) Anexos A, B, C, D, E y F Pág. 151 Ecuación de la elástica Se obtiene la ecuación de la elástica en AC, Ec. E.45, y CD, Ec. E.46. Pa ( L a ) Pa ( L a ) 2 L L Px Lx x → 2 2 w AC ( x) 3aL 3a x 1 6 EI 6 EI L Pa ( L a) Pa ( L a) x L L L wAC ( x) Px 2 3aL 3a 2 Lx 6 LEI (Ec. E.45) Pa ( L a ) Pa ( L a ) 2 L L Pa Lx x → 2 2 wCD ( x) 3Lx 3x a 1 6 EI 6 EI L Pa( L a) Pa( L a) x L L L wCD ( x) Pa 2 aL 3Lx 3x 2 6 LEI (Ec. E.46) Flecha Debido a la simetría geométrica y de varga, la flecha máxima está en la sección central (L/2).Para obtener la flecha máxima, se utiliza la ecuación de la elástica y se evalúa en la distancia L/2, Ec. E.47. máx wCD ( x 2 L Pa 2 L L Pa 2 → máx 3L 4a ) aL 3 L 3 2 6 LEI 2 2 24 EI (Ec. E.47) Pág. 152 Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 E.4 Viga biempotrada con carga repartida p = A B RA RB L p + A B RA i RB i MA MB A B (MB-MA)/L (MB-MA)/L Fig. E.5 Superposición de viga biempotrada con una carga repartida Se aplica la condición de igualdad de ángulos en los dos extremos (Ec. E.48 y Ec. E.49), obteniendo dos ecuaciones con dos incógnitas. L2M A M B pL3 0 → pL2 42 M A M B 0 24 EI 6 EI LM A 2M B pL3 0 → pL2 42 M A M B 0 24 EI 6 EI (Ec. E.48) (Ec. E.49) Solucionando el sistema de ecuaciones (se resta el doble de la primera ecuación de la segunda) se obtienen los valores del momento en A (Ec. E.50) y en B (Ec. E.51). pL2 2 pL2 12 M B → M B pL2 12 (Ec. E.50) pL2 pL2 0 → MA pL2 4 2M A 12 12 (Ec. E.51) Reacciones Una vez obtenido el valor de MA y MB, y a partir de las Ec. E.2 y Ec. E.3 se obtienen los valores de las reacciones (Ec. E.52 y Ec. E.53). RA pL pL2 pL2 1 pL → RA 2 2 12 12 L (Ec. E.52) RB pL pL2 pL2 1 2 12 12 L (Ec. E.53) → RB pL 2 Anexos A, B, C, D, E y F Pág. 153 Diagramas de esfuerzos cortantes y momento flector También se obtienen la ley de momentos flectores (Ec. E.54) y de esfuerzos cortantes para el tramo AB (Ec. E.55). M AB px( L x) pL2 x pL2 x 1 2 12 L 12 L 2 2 L pL Pab 1 T AB p x 2 L L 2 12 → M AB → TAB p 2 L 6 Lx 6 x 2 12 p L 2 x 2 (Ec. E.54) (Ec. E.55) DEC DEF Ecuación de la elástica Se obtiene la ecuación de la elástica, Ec. E.56. w AB ( x) px Lx x pL2 pL2 pL2 pL2 x x 3 2 Lx 2 L3 → 1 2 24 EI 6 EI L 12 12 12 12 L pL3 x x wAB ( x) 1 24 EI L 2 (Ec. E.56) Flecha El valor de flecha máxima se da en la sección central, L/2. Se utiliza la ecuación de la elástica y se evalúa en la distancia L/2, Ec. E.57. 3 máx wAC ( x L / 2) px L 1 L 1 24 EI 2 L 2 2 → máx pL4 384 EI (Ec. E.57) Pág. 154 Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 E.5 Viga biempotrada con carga repartida en el extremo p = A B RA RB a b L p + A B RA i RB i MA MB A B (MB-MA)/L (MB-MA)/L Fig. E.6 Superposición de viga biempotrada con una carga repartida en el extremo Se aplica la condición de igualdad de ángulos en los dos extremos (Ec. E.58 y Ec. E.59), obteniendo dos ecuaciones con dos incógnitas. L2M A M B pa 2 ( L b) 2 0 → 24 LEI 6 EI pa 2 L a2 1 2 12 EI 2 L pa 2 ( L b) 2 4 L2 2 M A M B 0 LM A 2M B a2 2 1 2 → 0 pa 2L 6 EI (Ec. E.58) 2M A 2M B 0 (Ec. E.59) Solucionando el sistema de ecuaciones (se suma el doble de la primera ecución a la segunda) se obtienen los valores del momento en A (Ec. E.60) y en B (Ec. E.61). pa 2 L2 3b 2 2bL 12 L2 M A 0 → M A a2 pa 2 1 2 2L MB pa 3 3L pa 2 2 L 3b 2 2bL 12 L2 pa 2 2 2 2 M A 2 12 L2 L 3b 2bL 3a 1 4L 0 → MB (Ec. E.60) pa 2 6a 2 8aL 24 L (Ec. E.61) Reacciones Una vez obtenido el valor de MA y MB, y a partir de las Ec. E.2 y Ec. E.3 se obtienen los valores de las reacciones (Ec. E.62 y Ec. E.63). Anexos A, B, C, D, E y F Pág. 155 RA pa a pa 3 3a pa 2 2 L 3b 2 2bL b 1 L 2 3L 4 L 12 L2 RA pa a pa 2 2 2 b 3 a 2aL L L 2 2L RB pa 2 pa 3 3a pa 2 2 L 3b 2 2bL 1 2 L 3L 4 L 12 L2 RB pa 2 pa 2 2 3 a 2aL L2 2L 2L → (Ec. E.62) L1 L1 → (Ec. E.63) Diagramas de esfuerzos cortantes y momento flector También se obtienen la ley de momentos flectores para el tramo AC (Ec. E.64) y para el tramo CB (Ec. E.65) y de esfuerzos cortantes para los tramos AC (Ec. E.66) y CB (Ec. E.67). M AC pa a px 2 pa 2 2 x pa 3 3a x 2 L 3 b 2 bL 1 → b x 1 L 2 2 12 L2 L 3L 4 L L M AC R A x M A px 2 2 (Ec. E.64) pa 2 pa 2 2 x pa 3 3a x 2 ( L x) L 3 b 2 bL 1 → 1 2L 12 L2 L 3L 4 L L M CB M CB RB ( L x) M B T AC (Ec. E.65) pa 3 pa a 3a pa 2 2 L 3b 2 2bL b px 1 2 L 2 3L 4 L 12 L L1 TAC R A px TCB (Ec. E.66) pa 3 3a pa 2 2 pa 2 px 1 L 3b 2 2bL 3L 4 L 12 L2 2L TCB R A pa → L1 → (Ec. E.67) Pág. 156 Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 DEC DEF Ecuación de la elástica Se obtiene la ecuación de la elástica en AC, Ec. E.68, y CB, Ec. E.69. w AC ( x) px 24 LEI 3 a 2 2 2 Lx 4a b 2 x a ( L b) pa 2 2 pa 3 3a 2 2 L 3 b 2 bL 1 2 3L 4 L 12 L → 2 Lx x pa 2 2 1 6 EI L pa 3 3a Pa ( L 12 L2 L 3b 2bL a ) x 1 L L 3L 4 L wAC ( x) x2 px 2 4 R A x 12M A 24 EI wCB ( x) (Ec. E.68) p( L x)a 2 a2 2 2 ( L x) L 1 2 12 LEI 2L pa 2 2 pa 3 3a 2 2 L 3 b 2 bL 1 3L 4 L 12 L2 → 2 Lx x pa 2 2 1 6 EI L pa 3 3a Pa ( L 12 L2 L 3b 2bL a ) x 1 L L 3L 4 L wCB ( x) 1 RB x 3 3M B LR B x 2 32 M B LR B Lx 3M B LR B L2 6 EI (Ec. E.69) Anexos A, B, C, D, E y F Pág. 157 Flecha Para obtener el valor de la sección donde la flecha es máxima, se iguala a cero la ecuación de la derivada de la elástica, Ec. E.70. w 1 3RB x 2 6M B LRB x 32M B LRB L 0 → x CB 6 EI x M B LRB M B RB → x 2 M B LR B RB (Ec. E.70) Substituyendo este valor en la ecuación de la elástica, Ec. E.69, se obtiene el valor máximo de flecha, Ec. E.71. 2M B LR B máx wCB x RB máx 2M B3 3RB2 EI 1 R B x 3 3M B LR B x 2 32M B LR B Lx 3M B LR B L2 6 EI (Ec. E.71) Pág. 158 Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 E.6 Viga biempotrada con carga repartida en un tramo c p = D C A B RA RB a b L p + A B R Ai R Bi MA MB A B (MB-MA)/L (MB-MA)/L Fig. E.7 Superposición de viga biempotrada con carga repartida en un tramo Se aplica la condición de igualdad de ángulos en los dos extremos (Ec. E.72 y Ec. E.73), obteniendo dos ecuaciones con dos incógnitas. pabc c 2 L2M A M B c2 L b L b L2M A M B 0 → 0 pabc 6 LEI 4a 6 EI 4a (Ec. E.72) pabc c 2 LM A 2M B L a 0→ 6 LEI 4a 6 EI c2 pabc L a LM A 2M B 0 4a (Ec. E.73) Solucionando el sistema de ecuaciones (se suma la primera ecuacion y el doble de la segunda) se obtienen los valores del momento en B (Ec. E.74) y en A (Ec. E.75). 2 1 pabc 4 L 4b 8a c 2 3M B L2 0 → b a MB pc 3 12 L2 12a 2 b L 3a 2 c c2 pc 3 L M A 2 pabc L a 4a 12 L2 MA pc 3 12 L2 12ab 2 L 3b c2 (Ec. E.74) 12a 2 b L 3a 0 → c 2 (Ec. E.75) Anexos A, B, C, D, E y F Pág. 159 Reacciones Una vez obtenido el valor de MA y MB, y a partir de las Ec. E.2 y Ec. E.3 se obtienen los valores de las reacciones (Ec. E.76 y Ec. E.77). RA pbc pc 3 12 L2 L RA pbc M A M B L L RB pac pc 3 12 L2 L RB pac M A M B L L 12a 2 b pc 3 L 3a c 2 12 L2 1 L → 12ab 2 L 3b c2 (Ec. E.76) 12a 2 b pc 3 L 3a 2 12 L2 c 12ab 2 L 3b c2 1 L → (Ec. E.77) Diagramas de esfuerzos cortantes y momento flector También se obtienen la ley de momentos flectores para el tramo AC (Ec. E.78), CD (Ec. E.79) y DB (Ec. E.80) y de esfuerzos cortantes para los tramos AC (Ec. E.81), CD (Ec. E.82) y DB (Ec. E.83). M AC 12ab 2 x pc 3 L 3b 1 c 2 L 12 L2 pbcx pc 3 L 12 L2 12a 2 b x L 3a c 2 L → M AC R A x M A (Ec. E.78) 2 M CD pbcx p c pc 3 x a L 2 2 12 L2 M CD R A x M A M DB p c xa 2 2 pac( L x) pc 3 L 12 L2 12ab 2 x pc 3 L 3b 1 c 2 L 12 L2 12a 2 b x L 3a c 2 L 2 12ab 2 L 3b c2 (Ec. E.79) x pc 3 1 L 12 L2 12a 2 b x L 3a → c 2 L M DB RB ( L x) M B T AC pbc pc 3 12 L2 L T AC R A 12a 2 b pc 3 L 3a 2 12 L2 c (Ec. E.80) 12ab 2 L 3b c2 1 L → (Ec. E.81) Pág. 160 Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 Pa( L a) Pa( L a) 1 → TCD 0 L L L c TCD R A p x a 2 TDB pac pc 3 12 L2 L 12a 2 b pc 3 L 3a c 2 12 L2 (Ec. E.82) 12ab 2 L 3b c2 TDB RB 1 L → (Ec. E.83) DEC DEF Ecuación de la elástica Se obtiene la ecuación de la elástica en AC, Ec. E.84, en CD, Ec. E.85, y en DB, Ec. E.86. w AC ( x) pbcx 2 c 2 Lx x 1 x a L b 6 LEI 4a 6 EI L 3 2 3 2 2 pc L 3b 12ab pc L 3a 12a b 12 L2 c 2 12 L2 c 2 2 2 pc 3 pc 3 12 a b 12 ab x L 3a 2 12 L2 L 3b c 2 L 12 L2 c w AC ( x) x2 3M A R A x 6 EI → (Ec. E.84) Anexos A, B, C, D, E y F Pág. 161 4 p c c 2 Lx x x L x a 4bcx 3 4abc L b wCD ( x) 1 24 LEI 2 4a 6 EI L 3 2 3 2 2 pc L 3b 12ab pc L 3a 12a b 12 L2 c 2 12 L2 c 2 2 3 2 pc 3 12a b pc 12ab x L 3a L 3b 2 2 2 2 L 12 L 12 L c c 4 c 3 2 p x a 4 R A x 12M A x 2 wCD ( x) 1 24 EI wCD ( x) pac ( L x) c 2 Lx x 2 1 ( L x) b L a 6 LEI 4a 6 EI L 3 2 3 2 2 pc L 3b 12ab pc L 3a 12a b 2 2 2 2 12 L c 12 L c 2 2 pc 3 pc 3 12 a b 12 ab x L 3a 2 12 L2 L 3b c 2 L 12 L2 c wDB ( x) → (Ec. E.85) → 1 RB x 3 3M B LR B x 2 32 M A LR A Lx 3M B LR B L2 6 EI (Ec. E.86) Pág. 162 Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 E.7 Viga biempotrada con carga repartida creciente p = A B RA RB L + A B RA i R Bi MA MB A B Fig. E.8 Superposición de viga biempotrada con carga repartida creciente Se aplica la condición de igualdad de ángulos en los dos extremos (Ec. E.87 y Ec. E.88), obteniendo dos ecuaciones con dos incógnitas. L2M A M B 7 pL3 0 360 EI 6 EI → 7 pL2 120 M A 60 M B 0 (Ec. E.87) LM A 2M B pL3 0 45EI 6 EI → 2 pL2 15M A 30 M B 0 (Ec. E.88) Solucionando el sistema de ecuaciones (se suma el doble de la segunda ecuación y la primera) se obtienen los valores del momento en A (Ec. E.89) y en B (Ec. E.90). 3 pL2 90 M A 0 → M A pL2 30 (Ec. E.89) pL2 pL2 60M B 0 → M B 7 pL2 120 20 30 (Ec. E.90) Reacciones Una vez obtenido el valor de MA y MB, y a partir de las Ec. E.2 y Ec. E.3 se obtienen los valores de las reacciones (Ec. E.91 y Ec. E.92). RA pL pL2 pL2 1 3 pL → RA 20 6 20 30 L (Ec. E.91) RB pL pL2 pL2 1 3 20 30 L (Ec. E.92) → RB 7 pL 20 Anexos A, B, C, D, E y F Pág. 163 Diagramas de esfuerzos cortantes y momento flector También se obtienen la ley de momentos flectores (Ec. E.93) y de esfuerzos cortantes para el tramo AB (Ec. E.94). M AB p 2 pLx x 2 pL2 x pL2 x 1 2 L 6 Lx 6 x 2 → M AB 1 12 6 L 30 L 20 L TAB TAB pL 3 x 2 1 2 6 L pL2 pL2 1 p 20 30 L → T AB 2 L 2 x (Ec. E.93) (Ec. E.94) DEC DEF Ecuación de la elástica Se obtiene la ecuación de la elástica, Ec. E.95. 10 x 2 3 x 4 Lx x pL2 pL2 pL2 pL2 x 7 2 4 1 2 → 30 20 20 30 L L L 6 EI L w AB ( x) pL3 x 360 EI w AB ( x) pL3 x 10 x 2 3x 4 7 2 4 360 EI L L (Ec. E.95) Flecha Para obtener el valor de la sección donde la flecha es máxima, se iguala a cero la ecuación de la derivada de la elástica, Ec. E.96. w x AB pL3 30 x 2 15 x 4 7 2 4 360 EI L L 21L 0 → x 40 (Ec. E.96) Substituyendo este valor en la ecuación de la elástica, Ec. E.95, se obtiene el valor máximo de flecha, Ec. E.97. 2 4 21L pL3 21L 10 21L 3 21L → máx wCB x 7 2 4 40 360 EI 40 L 40 L 40 máx pL4 764 EI (Ec. E.97) Pág. 164 Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 E.8 Viga biempotrada con carga repartida creciente en el extremo p = C A B RA RB a b L p + A B RA i RBi MA MB A B (MB-MA)/L (MB-MA)/L Fig. E.9 Superposición de viga biempotrada con carga repartida creciente en el extremo Se aplica la condición de igualdad de ángulos en los dos extremos (Ec. E.98 y Ec. E.99), obteniendo dos ecuaciones con dos incógnitas. L2M A M B pa 2 40 L2 45aL 12a 2 0 → 360 LEI 6 EI pa 2 40 L2 45aL 12a 2 60 L2 2 M A M B 0 pa 2 L 3a 2 1 18EI 5L2 (Ec. E.98) LM A 2M B 0 → 6 EI pa 2 L 5 L2 3a 2 15 L2 M A 2 M B 0 (Ec. E.99) Solucionando el sistema de ecuaciones (se suma el doble de la segunda ecuación a la primera) se obtienen los valores del momento en A (Ec. E.100) y en B (Ec. E.101). pa 2 30 L 45aL 18a 2 90 L2 M A 0 → M A pa 2 10 L2 15aL 6a 2 30 L2 (Ec. E.100) pa 2 2 2 0 → pa 2 40 L2 45aL 12a 2 60 L2 2 10 L 15 aL 6 a M B 30 L2 MB pa 3 4a 1 4 L 5L (Ec. E.101) Anexos A, B, C, D, E y F Pág. 165 Reacciones Una vez obtenido el valor de MA y MB, y a partir de las Ec. E.2 y Ec. E.3 se obtienen los valores de las reacciones (Ec. E.102 y Ec. E.103). RA pa(3L 2a) pa 3 4a pa 2 10 L2 15aL 6a 2 1 2 6L 4 L 5 L 30 L RA pa a M MB b A 2L 3 L RB pa 2 pa 3 4a pa 2 10 L2 15aL 6a 2 1 3L 4 L 5L 30 L2 RB pa 2 M A M B 3L L L1 → (Ec. E.102) L1 → (Ec. E.103) Diagramas de esfuerzos cortantes y momento flector También se obtienen la ley de momentos flectores para el tramo AC (Ec. E.104) y para el tramo CB (Ec. E.105) y de esfuerzos cortantes para los tramos AC (Ec. E.106) y CB (Ec. E.107). M AC px 2a 2 3 a 6 L M AC R A x M A x 2 pa 2 10 L2 15aL 6a 2 2 a 30 L 4a x 1 Lx pa 1 4L 5L L 3 px 3 6a → M CB RB ( L x) M B TAC (Ec. E.105) pa (3L 2a) px 2 pa 3 4a pa 2 10 L2 15aL 6a 2 1 6L 2a 4 L 5L 30 L2 TAC R A TCB → (Ec. E.104) pa 2 x pa 2 x pa 3 4a x 2 2 10 L 15 aL 6 a 1 1 1 3 L 30 L2 L 4 L 5L L M CB L1 → px 2 2a (Ec. E.106) pa 2 pa 3 4a pa 2 10 L2 15aL 6a 2 1 3L 4 L 5 L 30 L2 L1 → TCB RB (Ec. E.107) Pág. 166 Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 DEC DEF Ecuación de la elástica Se obtiene la ecuación de la elástica en AC, Ec. E.108, y CB, Ec. E.109. px 3Lx 4 10(3L 2a)a 2 x 2 a 3 (40 L2 45aL 12a 2 ) 360aLEI pa 2 pa 3 4a 2 2 2 10 L 15 aL 6 a 1 4 L 5L 30 L2 Lx x 1 3 2 6 EI L pa 4a pa x 2 2 4 L 1 5L 30 L2 10 L 15aL 6a L w AC ( x) w AC ( x) x 2 px 3 20 R A x 60M A 120 EI a wCB ( x) pa 2 ( L x) 3a 2 2 2 ( L x) L 1 2 18 LEI 5L (Ec. E.108) pa 2 pa 3 4a 2 2 2 10 L 15 aL 6 a 1 4 L 5L 30 L2 Lx x 1 6 EI L pa 3 4a pa 2 2 2 4 L 1 5 L 30 L2 10 L 15aL 6a wCB ( x) → x L → 1 RB x 3 3M B LR B x 2 32 M B LR B Lx 3M B LR B L2 6 EI (Ec. E.109) Anexos A, B, C, D, E y F Pág. 167 Flecha Para obtener el valor de la sección donde la flecha es máxima, se iguala a cero la ecuación de la derivada de la elástica, Ec. E.110. w 1 3RB x 2 6M B LRB x 32M B LRB L 0 → x CB 6 EI x M B LRB M B RB → x 2 M B LR B RB (Ec. E.110) Substituyendo este valor en la ecuación de la elástica se obtiene el valor máximo de flecha, Ec. E.111. 2 M B LR B máx wCB x RB máx 2M B3 3RB2 EI 1 R B x 3 3M B LR B x 2 32 M B LR B Lx 3M B LR B L2 6 EI (Ec. E.111) Pág. 168 Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 E.9 Viga biempotrada con carga repartida decreciente en el extremo p = C A B RA RB a b L p + A B RA i RBi MA MB A B (MB-MA)/L (MB-MA)/L Fig. E.10 Superposición de viga biempotrada con carga repartida decreciente en el extremo Se aplica la condición de igualdad de ángulos en los dos extremos (Ec. E.112 y Ec. E.113), obteniendo dos ecuaciones con dos incógnitas. L2M A M B pa 2 20 L2 3a 2 15aL 0 → 360 LEI 6 EI pa 2 20 L2 15aL 3a 2 60 L2 2 M A M B 0 (Ec. E.112) pa 2 L 3a 2 LM A 2M B 1 0 → 36 EI 10 L2 6 EI pa 2 L 10 L2 3a 2 60 L2 M A 2 M B 0 (Ec. E.113) Solucionando el sistema de ecuaciones (se suma el doble de la segunda ecuación a la primera) se obtienen los valores del momento en B (Ec. E.114) y en A (Ec. E.115). pa 2 9a 2 15aL 180 L2 M B 0 → M B pa 3 3a 1 12 L 5L (Ec. E.114) L2 pa 2 L 10 L2 3a 2 60 L2 M A 2 2 p1 3 p 2 0 → 60 MA pa 2 10 L2 10aL 3a 2 60 L2 (Ec. E.115) Anexos A, B, C, D, E y F Pág. 169 Reacciones Una vez obtenido el valor de MA y MB, y a partir de las Ec. E.2 y Ec. E.3 se obtienen los valores de las reacciones (Ec. E.116 y Ec. E.117). RA pa(3L a) pa 3 3a pa 2 10 L2 10aL 3a 2 1 2 6L 12 L 5L 60 L RA pa 3L a M A M B 6L L RB pa 2 pa 3 3a pa 2 10 L2 10aL 3a 2 1 2 6 L 12 L 5L 60 L RB pa 2 M A M B 6L L L1 → (Ec. E.116) L1 → (Ec. E.117) Diagramas de esfuerzos cortantes y momento flector También se obtienen la ley de momentos flectores para el tramo AC (Ec. E.118) y para el tramo CB (Ec. E.119) y de esfuerzos cortantes para los tramos AC (Ec. E.120) y CB (Ec. E.121). M AC px a2 3a 6 L M AC R A x M A M CB pa 2 x x pa 3 3a x 2 2 3a x 10 L 10 aL 3 a 1 1 → 2 a L 12 L 5L L 60 L px 3 3a x 6a (Ec. E.118) pa 2 x pa 2 x pa 3 3a x → 2 2 10 L 10 aL 3 a 1 1 1 6 L 60 L2 L 12 L 5L L M CB RB ( L x) M B TAC (Ec. E.119) pa (3L a ) x pa 3 3a pa 2 px1 10 L2 10aL 3a 2 1 2 6L 2a 12 L 5L 60 L x TAC R A px1 2a L1 → (Ec. E.120) Pág. 170 TCB Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 pa 2 pa 3 3a pa 2 10 L2 10aL 3a 2 1 6 L 12 L 5 L 60 L2 L1 → TCB RB (Ec. E.121) DEC DEF Ecuación de la elástica Se obtiene la ecuación de la elástica en AC, Ec. E.122, y CB, Ec. E.123. px 3Lx 4 15aLx 3 10a 2 (3L a) a 3 (20 L2 15aL 3a 2 ) 360aEI pa 2 pa 3 3a 2 2 2 10 L 10 aL 3 a 1 2 12 L 5 L 60 L Lx x 1 6 EI L pa 3 3a pa 2 2 2 x → 12 L 1 5L 60 L2 10 L 10aL 3a L w AC ( x) w AC ( x) x 2 px 3 2 5 px 20 R x 60 M A A 120 EI a pa 2 ( L x) 10( L x) 2 10 L2 3a 2 360 LEI pa 2 pa 3 3a 2 2 2 10 L 10 aL 3 a 1 12 L 5L 60 L2 Lx x 1 6 EI L pa 3 3a pa 2 2 2 12 L 1 5L 60 L2 10 L 10aL 3a wCB ( x) wCB ( x) (Ec. E.122) x → L 1 RB x 3 3M B LR B x 2 32 M B LR B Lx 3M B LR B L2 6 EI (Ec. E.123) Anexos A, B, C, D, E y F Pág. 171 Flecha Para obtener el valor de la sección donde la flecha es máxima, se iguala a cero la ecuación de la derivada de la elástica, Ec. E.124. w 1 3RB x 2 6M B LRB x 32M B LRB L 0 → x CB 6 EI x M B LRB M B RB → x 2 M B LR B RB (Ec. E.124) Substituyendo este valor en la ecuación de la elástica, Ec. E.123, se obtiene el valor máximo de flecha, Ec. E.125. 2M B LR B máx wCB x RB máx 2M B3 3RB2 EI 1 R B x 3 3M B LR B x 2 32M B LR B Lx 3M B LR B L2 6 EI (Ec. E.125) Pág. 172 Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 E.10 Viga biempotrada con carga repartida creciente p1 y p2 p2 p1 = A B RA RB L p2 p1 + A B RA i RBi MA MB A B (MB-MA)/L (MB-MA)/L Fig. E.11 Superposición de viga biempotrada con carga repartida creciente p1 y p2 Se aplica la condición de igualdad de ángulos en los dos extremos (Ec. E.126 y Ec. E.127), obteniendo dos ecuaciones con dos incógnitas. L3 (8 p1 7 p2 ) L2M A M B 0 360 EI 6 EI 8 L2 p1 7 L2 p 2 120 M A 60 M B 0 (Ec. E.126) L3 (7 p1 8 p2 ) LM A 2M B 0 → 7 L2 p1 8 L2 p 2 60 M A 120 M B 0 360 EI 6 EI (Ec. E.127) → Solucionando el sistema de ecuaciones (se suma el doble de la segunda ecuación y la primera) se obtienen los valores del momento en B (Ec. E.128) y en A (Ec. E.129). 6 L2 p1 9 L2 p 2 180 M B 0 → MB L2 2 p1 3 p2 60 (Ec. E.128) L2 L2 7 L2 p1 8L2 p 2 60M A 120 2 p1 3 p 2 0 → M A 3 p1 2 p 2 60 60 (Ec. E.129) Reacciones Una vez obtenido el valor de MA y MB, y a partir de las Ec. E.2 y Ec. E.3 se obtienen los valores de las reacciones (Ec. E.130 y Ec. E.131). RA L2 1 L(2 p1 p 2 ) L2 2 p1 3 p 2 3 p1 2 p 2 60 6 60 L RA L 2 p1 p2 M A M B 6 L → (Ec. E.130) Anexos A, B, C, D, E y F RB L2 1 L( p1 2 p 2 ) L2 2 p1 3 p 2 3 p1 2 p 2 60 6 60 L RB L p1 2 p2 M A M B 6 L Pág. 173 → (Ec. E.131) Diagramas de esfuerzos cortantes y momento flector También se obtienen la ley de momentos flectores (Ec. E.132) y de esfuerzos cortantes para el tramo AB (Ec. E.133). M AB L(2 p1 p2 ) x p1 (3L x) p2 x 2 L2 x L2 x x 3 p1 2 p2 1 2 p1 3 p2 → 6 6 L 60 L 60 L p 3L x p 2 x 2 M AB R A x M A 1 x 6L TAB (Ec. E.132) L2 1 L(2 p1 p 2 ) p1 (2 L x) p 2 x L2 → x 2 p1 3 p 2 3 p1 2 p 2 6 2L 60 60 L p 2 L x p 2 x TAB R A 1 x 2L (Ec. E.133) DEC DEF Ecuación de la elástica Se obtiene la ecuación de la elástica, Ec. E.134. x( L x) 3( p1 p 2 ) x 3 3(4 p1 p 2 ) Lx 2 (8 p1 7 p 2 ) L2 x (8 p1 7 p 2 ) L3 ) 360 LEI L2 L2 x Lx x L2 L2 3 p1 2 p 2 1 2 3 p 2 p 2 p 3 p 2 p 3 p 1 2 1 2 1 2 60 L 60 6 EI L 60 60 x 2 p2 p1 3 (Ec. E.134) wAB ( x) x p1 Lx 2 4 R A Lx 12M A L 24 LEI 5 w AB ( x) Pág. 174 Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 E.11 Viga biempotrada con carga repartida decreciente y creciente = C A B RA RB L/2 L/2 p + A C B RA i MA MB A B RB i (MB-MA)/L (MB-MA)/L Fig. E.12 Superposición de viga biempotrada con carga repartida decreciente i creciente Se aplica la condición de igualdad de ángulos en los dos extremos (Ec. E.135 y Ec. E.136), obteniendo dos ecuaciones con dos incógnitas. L2M A M B pL3 0 → 3 pL2 322 M A M B 0 64 EI 6 EI LM A 2M B pL3 0 → 3 pL2 32M A 2 M B 0 64 EI 6 EI (Ec. E.135) (Ec. E.136) Solucionando el sistema de ecuaciones (se suma el doble de la segunda ecuación a la primera) se obtienen los valores del momento en B (Ec. E.137) y en A (Ec. E.138). 3 pL2 96 M B 0 → M B pL2 32 pL2 0 → 3 pL2 32 M A 2 32 (Ec. E.137) MA pL2 32 (Ec. E.138) Reacciones Una vez obtenido el valor de MA y MB, y a partir de las Ec. E.2 y Ec. E.3 se obtienen los valores de las reacciones (Ec. E.139 y Ec. E.140). Anexos A, B, C, D, E y F Pág. 175 RA pL pL2 pL2 1 4 32 32 L → RA pL 4 (Ec. E.139) RB pL pL2 pL2 1 4 32 32 L → RB pL 4 (Ec. E.140) Diagramas de esfuerzos cortantes y momento flector También se obtienen la ley de momentos flectores para el tramo AC (Ec. E.141) y para el tramo CB (Ec. E.142) y de esfuerzos cortantes para los tramos AC (Ec. E.143) y CB (Ec. E.144). M AC pa 2 px a2 x x pa 3 3a x 2 2 10 L 10 aL 3 a 1 1 → 3a 3a x 2 6 L a L 12 L 5L L 60 L M AC R A x M A px 2 3L 3L x 2 M CB RB L x M B DEF → p L x L x 3L 2 2 pL x pL2 pL2 1 pL x p 1 x px1 → T AC 4 L 4 L 32 32 L TCB DEC (Ec. E.141) 2 pL x pL2 3a x 1 x pL ( L 3x) px 2 1 1 12 2 3L 32 L 32 5L L M CB T AC pL x pL2 pL2 1 pL x px1 p 1 x → TCB 4 4 L L 32 32 L (Ec. E.142) (Ec. E.143) (Ec. E.144) Pág. 176 Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 Ecuación de la elástica Se obtiene la ecuación de la elástica en AC, Ec. E.145. w AC ( x) px 16 4 3 2 2 4 x 8 Lx 8 L x 3L 192 LEI 5 Lx x pL2 pL2 pL2 pL2 x 1 2 6 EI L 32 32 32 32 L w AC ( x) x2 120 EI → 2 px 3 2 L 5 px 20 R A x 60M A (Ec. E.145) Por simetría se obtiene la ecuación de la elástica en el tramo CB, Ec. E.146. wCB ( x) L x 2 2 pL x 3 5 pL x 2 20R L x 60M B B 120 EI L (Ec. E.146) Flecha Debido a la simetría geométrica y de carga, la flecha máxima está en la sección central (L/2).Para obtener la flecha máxima, se utiliza la ecuación de la elástica y se evalúa en la distancia L/2, Ec. E.147. máx 2 3 2 L 1 L 2 p L L L w AC ( x ) 5 p 20 R A 60M A → 2 120 EI 2 L 2 2 2 máx pL4 1280 EI (Ec. E.147) Anexos A, B, C, D, E y F Pág. 177 E.12 Viga biempotrada con carga repartida creciente y decreciente = C A B RA RB a b L p + A B RA i R Bi MA MB A B (MB-MA)/L (MB-MA)/L Fig. E.13 Superposición de viga biempotrada con carga repartida creciente y decreciente Se aplica la condición de igualdad de ángulos en los dos extremos (Ec. E.148 y Ec. E.149), obteniendo dos ecuaciones con dos incógnitas. L2 M A M B p ( L b) (7 L2 3b 2 ) 0 → 360 EI 6 EI p 8 L3 12a 2 L 8aL2 3a 3 120 LM A 60 LM B 0 (Ec. E.148) LM A 2 M B p( L a) (7 L2 3a 2 ) 0 → 360 EI 6 EI p 7 L3 3a 2 L 7 aL2 3a 3 60 LM A 120 LM B 0 (Ec. E.149) Solucionando el sistema de ecuaciones (se suma el doble de la segunda ecuación a la primera) se obtienen los valores del momento en B (Ec. E.150) y en A (Ec. E.151). p 6 L3 6a 2 L 6aL2 9a 3 180 LM B 0 → MB p 3 3 3 2 2 L aL a L a 30 L 2 (Ec. E.150) p 3 3 3 2 2 p 7 L3 3a 2 L 7aL2 3a 3 60 LM A 120 L L aL a L a 0 → 2 30l MA p 3 7 2 2 3 L aL a L a 20 L 3 (Ec. E.151) Pág. 178 Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 Reacciones Una vez obtenido el valor de MA y MB, y a partir de las Ec. E.2 y Ec. E.3 se obtienen los valores de las reacciones (Ec. E.152 y Ec. E.153). RA p p 3 3 3 p 3 7 2 2 2 2 3 1 ( L b) L aL a L a L aL a L a 6 2 20 L 3 L 30 L RA p L b M A M B 6 L RB p p 3 3 3 p 3 7 2 2 2 2 3 1 ( L a) L aL a L a L aL a L a 6 2 20 L 3 L 30 L RB p L a M A M B 6 L → (Ec. E.152) → (Ec. E.153) Diagramas de esfuerzos cortantes y momento flector También se obtienen la ley de momentos flectores para el tramo AC (Ec. E.154) y para el tramo CB (Ec. E.155) y de esfuerzos cortantes para los tramos AC (Ec. E.156) y CB (Ec. E.157). p px 3 p 3 7 2 x p 3 3 3 x 2 3 2 2 (2 L a) x L aL a L a 1 L aL a L a 6 6a 20 L 3 2 L L 30 L 3 px (Ec. E.154) RA x M A 6a M AC M AC p p( L x) 3 p 3 7 2 x 2 3 ( L a)( L x) L aL a L a 1 6 6b 20 L 3 L → p 3 3 3 x 2 2 L aL a L a 30 L 2 L M CB M CB RB L x M B TAC p L x 6b 3 (Ec. E.155) p px 2 p 3 3 3 p 3 7 2 2 2 2 3 1 ( L b) L aL a L a L aL a L a → 6 2a 30 L 2 20 L 3 L TAC R A px 2 2a (Ec. E.156) Anexos A, B, C, D, E y F TCB Pág. 179 p 3 3 3 2 2 L aL a L a 2 1 30 L p p ( L a ) ( L x) 2 L → 6 2b p 7 3 2 2 3 20 L L aL 3 a L a TCB RB p L x 2b 2 (Ec. E.157) DEC DEF Ecuación de la elástica Se obtiene la ecuación de la elástica en AC, Ec. E.158, y CB, Ec. E.159. w AC ( x) px 3 4 x 10( L b) x 2 ( L b)(7 L2 3b 2 ) 360 EI a p 3 7 2 p 3 3 3 2 3 2 2 2 L aL a L a L aL a L a 20 L 3 2 30 L Lx x 1 6 EI L p 3 3 3 p 3 7 2 2 2 2 3 x L aL a L a L aL a L a 30 L 2 20 L 3 L w AC ( x) x 2 px 3 20 R A x 60M A 120 EI a wCB ( x) p ( L x) 3 ( L x) 4 10( L a )( L x) 2 ( L a )(7 L2 3a 2 ) 360 EI b (Ec. E.158) p 3 7 2 p 3 3 3 2 3 2 2 2 L aL a L a L aL a L a 20 L 3 2 30l Lx x 1 6 EI L p 3 3 3 p 3 7 2 2 2 2 3 x L aL a L a L aL a L a 30 L 2 20 L 3 L wCB ( x) L x 2 pL x 3 20R L x 2 60M B B 120 EI b → → (Ec. E.159) Pág. 180 Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 E.13 Viga biempotrada con carga repartida creciente y decreciente = C A B RA RB L/2 L/2 p + A B R Ai R Bi MA MB A B (MB-MA)/L (MB-MA)/L Fig. E.14 Superposición de viga biempotrada con carga repartida creciente y decreciente simétrica Se aplica la condición de igualdad de ángulos en los dos extremos (Ec. E.160 y Ec. E.161), obteniendo dos ecuaciones con dos incógnitas. 5 pL3 L2M A M B 0 → 5 pL3 64 M A 32 M B 0 192 EI 6 EI 5 pL3 LM A 2M B 0 → 5 pL3 32 M A 64 M B 0 192 EI 6 EI (Ec. E.160) (Ec. E.161) Solucionando el sistema de ecuaciones (se suma el doble de la segunda ecuación a la primera) se obtienen los valores del momento en B (Ec. E.162) y en A (Ec. E.163). 5 pL3 96 M B 0 → M B 5 pL2 5 pL3 32M A 64 96 5 pL2 96 5 pL2 0 → MA 96 (Ec. E.162) (Ec. E.163) Reacciones Una vez obtenido el valor de MA y MB, y a partir de las Ec. E.2 y Ec. E.3 se obtienen los valores de las reacciones (Ec. E.164 y Ec. E.165). Anexos A, B, C, D, E y F Pág. 181 RA pL 5 pL2 5 pL2 4 96 96 1 L → RA pL 4 (Ec. E.164) RB pL 5 pL2 5 pL2 4 96 96 1 L → RB pL 4 (Ec. E.165) Diagramas de esfuerzos cortantes y momento flector También se obtienen la ley de momentos flectores para el tramo AC (Ec. E.166) y para el tramo CB (Ec. E.167) y de esfuerzos cortantes para los tramos AC (Ec. E.168) y CB (Ec. E.169). M AC pL 4 px 3 5 pL2 x 5 pL2 x px 3 x → 1 M R x M AC A A 4 96 L 96 L 3L 3L2 M CB pL L 4 x 2 4 x 3 5 pL2 x 5 pL2 x 3x → 1 4 3 L 96 L 96 L 3L2 M CB RB L x M B TAC DEF 3 pL px 2 5 pL2 5 pL2 4 L 96 96 TCB DEC p L x 3L (Ec. E.166) (Ec. E.167) 1 1 x2 2 → T pL AC L 4 L 5 pL2 5 pL2 pL p ( L x) 2 96 4 L 96 2 1 p L x → T R CB B L 2b (Ec. E.168) (Ec. E.169) Pág. 182 Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 Ecuación de la elástica Se obtiene la ecuación de la elástica en AC, Ec. E.170. x2 x4 25 40 2 16 4 L L Lx 6 EI w AC ( x) pL3 x 960 EI wAC ( x) px 2 16 x 3 40 L2 x 25L3 960 LEI x 5 pL2 5 pL2 5 pL2 5 pL2 1 2 96 96 96 L 96 x L (Ec. E.170) Por simetría se obtiene la ecuación de la elástica en el tramo CB, Ec. E.171. wCB ( x) p L x 3 16L x 40 L2 L x 25L3 960 LEI 2 (Ec. E.171) Flecha Debido a la simetría geométrica y de carga, la flecha máxima está en la sección central (L/2).Para obtener la flecha máxima, se utiliza la ecuación de la elástica y se evalúa en la distancia L/2, Ec. E.172. máx w AC ( x f máx 7 pL4 3840 EI L p L ) 2 960 LEI 2 2 L 3 16 40 L2 L 25L3 → 2 2 (Ec. E.172) Anexos A, B, C, D, E y F Pág. 183 E.14 Viga biempotrada con carga repartida trapezoidal p = D C A B RA RB a a b L p + A B RAi RBi MA MB A B (MB-MA)/L (MB-MA)/L Fig. E.15 Superposición de viga biempotrada con carga repartida trapeoidal Se aplica la condición de igualdad de ángulos en los dos extremos (Ec. E.173 y Ec. E.174), obteniendo dos ecuaciones con dos incógnitas. pL2 b2 ( L b) 5 2 192 EI L L2M A M B 0 → 6 EI p L b 5 L2 b 2 64 LM A 32 LM B 0 pL2 b2 ( L b) 5 2 192 EI L (Ec. E.173) LM A 2M B 0 → 6 EI p L b 5 L2 b 2 32 LM A 64 LM B 0 (Ec. E.174) Solucionando el sistema de ecuaciones (se suma el doble de la segunda ecuación a la primera) se obtienen los valores del momento en B (Ec. E.175) y en A (Ec. E.176). p L b 5 L2 b 2 96 LM B 0 → MB pLL b b2 5 2 96 L pLL b b2 5 2 pL b 5L2 b 2 32 LM A 64 L 96 L MA pLL b b2 5 2 96 L (Ec. E.175) 0 → (Ec. E.176) Pág. 184 Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 Reacciones Una vez obtenido el valor de MA y MB, y a partir de las Ec. E.2 y Ec. E.3 se obtienen los valores de las reacciones (Ec. E.177 y Ec. E.178). RA pLL b p b2 5 2 ( L a) 2 96 L RA p L a 2 RB pLL b p b2 5 2 ( L a) 2 96 L RB p L a 2 pLL b b2 5 2 96 L 1 L → (Ec. E.177) pLL b b2 5 2 96 L 1 L → (Ec. E.178) Diagramas de esfuerzos cortantes y momento flector También se obtienen la ley de momentos flectores para el tramo AC (Ec. E.179) y para el tramo CD (Ec. E.180) y de esfuerzos cortantes para los tramos AC (Ec. E.181), CD (Ec. E.182) y DB (Ec. E.183). M AC p px 3 pLL b b2 5 2 ( L a) x 2 2a 96 L M AC R A x M A M CB x L px 3 6a (Ec. E.179) p pLL b b2 x pLL b b2 x 5 2 1 5 2 (3Lx a 2 3x 2 ) 6 96 96 L L L L M CD R A x M A TAC x pLL b b2 1 5 2 L 96 L p 3 x 2 3ax a 2 6 p px 2 pLL b b2 5 2 ( L a) 2 2a 96 L TAC R A px 2 2a → (Ec. E.180) pLL b b2 5 2 96 L 1 L → (Ec. E.181) Anexos A, B, C, D, E y F Pág. 185 TCD pLL b p b2 5 2 ( L 2 x) 2 96 L TCD p L 2x 2 TDB pLL b b2 5 2 96 L → (Ec. E.182) 2 p p L x pLL b b2 5 2 ( L a) 2 2a 96 L TDB R A 1 L pLL b b2 5 2 96 L 1 L p L x 2a → 2 (Ec. E.183) DEC DEF Ecuación de la elástica Se obtiene la ecuación de la elástica en AC, Ec. E.184, y en CB, Ec. E.185. w AC ( x) px x 4 ( L a ) 2 L2 ( L b) b2 x 5 EI 120a 12 192 L2 2 2 2 pLL b 5 b pLL b 5 b → 2 2 96 96 L L Lx x 1 2 2 6 EI L pLL b pLL b b b x 5 2 5 2 96 96 L L L w AC ( x) x 2 px 3 20 R A x 60M A 120 EI a (Ec. E.184) Pág. 186 wCD ( x) Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 p EI x 4 Lx 3 a 2 x 2 L 2 a4 2 ( L 2 a ) x 12 24 120 24 12 2 2 2 pLL b 5 b pLL b 5 b → 2 2 96 96 L L Lx x 1 2 2 6 EI L pLL b pLL b b b x 5 2 5 2 96 96 L L L wCD ( x) 1 5 px 4 10 pa 2 R A x 3 10 pa 2 6 M A x 2 5 pa 3 x pa 4 120 EI (Ec. E.185) Por simetría se obtiene la ecuación de la elástica en DB, Ec. E.186. wAC ( x) L x 2 pL x 3 20R L x 60M A A 120 EI a (Ec. E.186) Anexos A, B, C, D, E y F Pág. 187 E.15 Viga biempotrada con momento aplicado en una sección M = C A B RA RB a b L M + A B R Ai RB i MA MB A B (MB-MA)/L (MB-MA)/L Fig. E.16 Superposición de viga biempotrada con momento aplicado en una sección Se aplica la condición de igualdad de ángulos en los dos extremos (Ec. E.187 y Ec. E.188), obteniendo dos ecuaciones con dos incógnitas. L2M A M B 3b 2 ML b 2 3 2 1 2 1 2M A M B 0 → 0 M 6 EI L 6 EI L (Ec. E.187) LM A 2M B 3b 2 ML a 2 3 2 1 2 1 M A 2M B 0 → 0 M 6 EI L 6 EI L (Ec. E.188) Solucionando el sistema de ecuaciones (se suma el doble de la segunda ecuación a la primera) se obtienen los valores del momento en B (Ec. E.189) y en A (Ec. E.190). 3b 2 3b 2 M 2 1 2M 2 1 3M B 0 L L → MB 3b 2 Ma 3a M 2 1 M A 2 2 0 L L L → MA Ma 3a 2 L L Mb 3b 2 L L (Ec. E.189) (Ec. E.190) Reacciones Una vez obtenido el valor de MA y MB, y a partir de las Ec. E.2 y Ec. E.3 se obtienen los valores de las reacciones (Ec. E.191 y Ec. E.192). RA 6Mab M Ma 3a Mb 3b 1 2 2 → R A 3 L L L L L L L (Ec. E.191) Pág. 188 RB Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 M Ma 3a Mb 3b 1 2 2 L L L L L L → RB 6Mab L3 (Ec. E.192) Diagramas de esfuerzos cortantes y momento flector También se obtienen la ley de momentos flectores para el tramo AC (Ec. E.193) y para el tramo CB (Ec. E.194) y de esfuerzos cortantes para el tramo AB (Ec. E.195). M AC M Mb 3b b 2 x Ma 3a b2 x 2 5 1 2 5 L L L L L2 L L L2 M AC Mb 3a 2 x 1 1 L L L M CB M Mb 3b b2 ( L x) 2 5 2 L L L L M CB TAB x L → (Ec. E.193) x Ma 3a b2 1 5 2 2 L L L L x L → Ma 3b 2L x 1 1 L L L 6Mab M Ma 3a Mb 3b 1 → TAB 2 2 L L L L L L L3 (Ec. E.194) (Ec. E.195) DEC DEF Ecuación de la elástica Se obtiene la ecuación de la elástica en AC, Ec. E.196, y en CB, Ec. E.197. Mb 3b Ma 3a 2 2 2 L L L MLx b 2 x 2 Lx x L 1 3 2 2 w AC ( x) 1 6 EI L L 6 EI L Ma 3a Mb 3b x 2 2 L L L L L → Anexos A, B, C, D, E y F w AC ( x) Pág. 189 Mbx 2 2aL x b 2 LEI L L2 (Ec. E.196) Mb 3b Ma 3a 2 2 2 L L L ML( L x) a 2 L x Lx x L wCB ( x) 1 3 2 1 6 EI L L 6 EI L Ma 3a Mb 3b x 2 2 L L L L L 2 wCB ( x) MaL x 2bx a 2 LEI L2 L 2 (Ec. E.197) Flecha Para obtener la flecha en la sección C, se utiliza la ecuación de la elástica y se evalúa en la distancia a, Ec. E.198. C w AC ( x a) Mba 2 2aL a b 2 LEI L L2 → C Ma 2 b 2 a b 2 L3 EI (Ec. E.198) Pág. 190 Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 F. Análisis de vigas continuas Las vigas continuas son vigas de varios tramos. La principal ventaja de las vigas continuas, es la disminución de los momentos flectores máximos en los tramos, por tanto la flecha es menor. Como consecuencia, las vigas continuas resultan más económicas que vigas independientes de la misma longitud sometidas a las mismas cargas. Para resolver este tipo de vigas, se utiliza el teorema de los tres momentos (Ec F.1) indicado en la memoria, 4.1.5 Vigas continuas. También se utiliza la fórmula de cálculo de las reacciones (Ec. F.2), a partir de los cuales se desarrollan los diagramas de momentos cortantes. Seguidamente se muestra el procedimiento utilizado para calcular el formulario de vigas continuas. D d M m 1 Lm 2 M m Lm Lm 1 M m 1 Lm 1 6 m m m 1 m 1 Lm 1 Lm Rm R ' m ,m 1 R ' m,m 1 (Ec. F.1) M m 1 M m M m 1 M m Lm Lm 1 (Ec. F.2) F.1 Viga continua de dos vanos iguales con dos cargas puntuales aplicadas En la siguiente figura, Fig. F.1, se muestra una viga continua de dos vanos iguales a la que se le ha aplicado una carga puntual centrada en cada vano. P P 0 2 1 L/2 L/2 L L/2 L/2 L Fig. F.1 Viga de dos vanos con 2 cargas puntuales aplicadas Momentos Flectores En la siguiente figura se muestra el diagrama de momentos para el tramo 0-1 que es igual al tramo 1-2 (Fig. F.2), a partir de ella se encuentra el valor del área del diagrama de mometos, Ω (Ec. F.3). PL L PL2 4 2 8 (Ec. F.3) Anexos A, B, C, D, E y F Pág. 191 P 0 1 L/2 L/2 L DMF PL/4 Fig. F.2 Diagrama de momentos para los tramos 0-1 y 1-2 En los apoyos 0 y 2 el momento es nulo, M 0 M 2 0 . El momento del apoyo 1 se calcula aplicando el terorema de los 3 momentos (Ec. F.4). PL 2 L PL 2 L PL2 → 4M 1 L 12 M 0 L 2M 1 L L M 2 L 6 16 8L 2 8L 2 → M 1 0,1875 PL (Ec. F.4) Esfuerzos cortantes Apartir de la Ecuación F.2 se calculan las reacciones en 0 (Ec. F.5), 1 (Ec. F.6) y 2 (Ec. F.7). R0 R ' 0,1 M 1 M 0 P 0,1875 PL L 2 L R1 R '1,0 R '1, 2 → R0 0,3125 P M 0 M1 M 2 M1 P P 0,1875 PL 2 → R1 1,375 P L L 2 2 L R2 R0 → R2 0,3125 P (Ec. F.5) (Ec. F.6) (Ec. F.7) Diagramas de momentos flectores y esfuerzos cortantes A partir del valor de las reacciones y cargas se obtiene el diagrama de esfuerzos cortantes. Se calcula el esfuerzo cortante en el tramo 0-P (Ec. F.8) y en el tramo P-1 (Ec. F.9) T0 P R0 0,3125 P (Ec. F.8) TP1 R0 P 0,3125P P → TP1 0,688 P (Ec. F.9) Pág. 192 Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 Fig. F.3 Diagrama de esfuerzos cortantes Se calculan los valores de momento flector en la sección P (Ec. F.10) y en la sección del apoyo (Ec. F.11) L PL M P x 0,3125 Px 0,3125 2 2 → M P 0,156 PL (Ec. F.10) L M 1 x L 0,3125 Px P x 0,3125 PL 0,5 PL → M 1 0,188PL 2 (Ec. F.11) Fig. F.4 Diagrama de momentos flectores F.2 Viga continua de dos vanos iguales con carga repartida En la siguiente figura, Fig. F.5, se muestra una viga continua de dos vanos iguales a la que se le ha aplicado una carga repartida. p 0 2 1 L L Fig. F.5 Viga de dos vanos iguales con carga repartida Momentos Flectores En la siguiente figura se muestra el diagrama de momentos para el tramo 0-1 que es igual al tramo 1-2 (Fig. F.6) Anexos A, B, C, D, E y F Pág. 193 p 0 1 L Fig. F.6 Diagrama momentos para los tramos 0-1 y 1-2 Se calcula el valor del área del diagrama de mometos, Ω (Ec. F.12) a partir de la expresión analítica. L pLx px 2 pLx 2 px 3 pL3 pL3 pL3 dx → 1 2 2 2 6 0 4 6 12 4 0 L (Ec. F.12) En los apoyos 0 y 2 el momento es nulo, M 0 M 2 0 . El momento del apoyo 1 se calcula aplicando el terorema de los 3 momentos (Ec. F.13). pL 3 L pL 3 L pL2 → 4M 1 L 6 M 0 L 2M 1 L L M 2 L 6 12 → 12 L 2 12 L 2 M 1 0,125 pL2 (Ec. F.13) Esfuerzos cortantes Apartir de la Ecuación F.2 se calculan las reacciones en 0 (Ec. F.14), 1 (Ec. F.15) y 2 (Ec. F.16). R0 R ' 0,1 M 1 M 0 pL pL2 3 pL L 2 8L 8 R1 R '1,0 R '1, 2 → R0 0,375 pL pL2 M 0 M 1 M 2 M 1 pL pL → R1 1,25 pL 2 L L 2 2 8L R2 R0 → R2 0,375 pL (Ec. F.14) (Ec. F.15) (Ec. F.16) Diagramas de momentos flectores y esfuerzos cortantes A partir del valor de las reacciones y cargas se obtiene el diagrama de esfuerzos cortantes. Se calcula el esfuerzo cortante en el tramo 0-1 (Ec. F.17) y el valor del cortante en la sección 1 (Ec. F.18). Pág. 194 Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 T01 R0 px → T01 0,375 pL px (Ec. F.17) T1 x L 0,375 pL pL → T1 0,375 pL pL → T1 0,625 pL (Ec. F.18) Se calcula el esfuerzo cortante en el tramo 1-2 (Ec. F.19) y el valor del cortante en la sección 2 (Ec. F.20). T12 T1 px → T01 0,625 pL px (Ec. F.19) T2 x L 0,375 pL (Ec. F.20) Fig. F.7 Diagrama de esfuerzos cortantes Se calculan los valores de momento flector en el tramo 0-1 (Ec. F.21) M 01 0,375 pLx px 2 2 (Ec. F.21) Para obtener el la sección donde el momento es máximo, se iguala a cero la expresión del momento en el tramo 0-1 (Ec. F.22). M 01 0,375 pL px 0 → x 0,375L x (Ec. F.22) Substituyendo este valor en la expresión del momento en el tramo 0-1 (Ec. F.21) se obtiene el valor de momento máximo en el tramo (Ec. F.23). 01 M máx M 01 x 0,375L 0,375 pL0,375L p0,375L 2 → M máx. 0,07 pL 2 2 Fig. F.8 Diagrama de momentos flectores (Ec. F.23) Anexos A, B, C, D, E y F Pág. 195 F.3 Viga continua de tres vanos iguales con tres cargas puntuales aplicadas En la siguiente figura, Fig. F.9, se muestra una viga continua de tres vanos iguales a la que se le ha aplicado una carga puntual centrada en cada vano. P P 0 P 1 L/2 L/2 3 2 L/2 L/2 L L L/2 L/2 L Fig. F.9 Viga de tres vanos con 3 cargas puntuales aplicadas Momentos Flectores El diagrama de momentos para el tramo 0-1, igual al 1-2 y al 2-3, es el mismo que el indicado en el capítulo F.1 Viga continua de dos vanos iguales con 2 cargas puntuales aplicadas, Fig. F.1. Por tanto el área del diagrama de momentos es el mismo (Ec. F.24). PL L PL2 4 2 8 (Ec. F.24) En los apoyos 0 y 3 el momento es nulo, M 0 M 3 0 . El momento del apoyo 1 se calcula aplicando el terorema de los 3 momentos (Ec. F.25). Por simetría, M1 M 2 . PL 2 L PL 2 L PL2 → 4M 1 L M 2 L 6 M 0 L 2M 1 L L M 2 L 6 8 8L 2 8L 2 PL2 → M 1 M 2 0,150 PL 5M 1 L 6 8 → (Ec. F.25) Esfuerzos cortantes Apartir de la Ecuación F.2 se calculan las reacciones en 0 (Ec. F.26), 1 (Ec. F.27) y 2 (Ec. F.28). R0 R ' 0,1 M 1 M 0 P 0,150 PL L 2 L R1 R '1,0 R '1, 2 → R0 0,350 P M 0 M 1 M 2 M 1 P P 0,150 PL → R1 1,15P L L 2 2 L R2 R1 → R2 1,15P (Ec. F.26) (Ec. F.27) (Ec. F.28) Pág. 196 Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 Diagramas de momentos flectores y esfuerzos cortantes A partir del valor de las reacciones y cargas se obtiene el diagrama de esfuerzos cortantes. Se calcula el esfuerzo cortante en el tramo 0-P (Ec. F.29), en el tramo P-1 (Ec. F.30), en el tramo 1-P (Ec. F.30), en el tramo P-2 (Ec. F.32), en el tramo 2-P (Ec. F.33), en el tramo P-3 (Ec. F.34), T0 P R0 → T0 P 0,350 P (Ec. F.29) TP1 R0 P 0,350 P P → TP1 0,650 P (Ec. F.30) T1P 0,650 P R1 0,650 P 1,15P → T1P 0,500 P (Ec. F.31) TP 2 0,500 P P TP 2 0,500 P (Ec. F.32) T2 P 0,500 P R2 0,500 P 1,15P → T2 P 0,650 P (Ec. F.33) TP 3 0,650 P P TP 3 0,350 P (Ec. F.34) → → Fig. F.10 Diagrama de esfuerzos cortantes Se calculan los valores de momento flector en la sección P1 (Ec. F.35) y en la sección P2 (Ec. F.36) L PL M P1 x 0,350 Px 0,3125 2 2 → M P1 0,175 PL L L L 3L M P2 R0 L R1 PL 0,350 P 1,150 P PL → M P2 0,100 PL 2 2 2 2 Fig. F.11 Diagrama de momentos flectores (Ec. F.35) (Ec. F.36) Anexos A, B, C, D, E y F Pág. 197 F.4 Viga continua de tres vanos iguales con carga repartida p 0 1 L 3 2 L L Fig. F.12 Viga de tres vanos iguales con carga repartida Momentos Flectores El diagrama de momentos para el tramo 0-1, igual al 1-2 y al 2-3, es el mismo que el indicado en el capítulo F.2 Viga continua de dos vanos iguales con carga repartida, Fig. F.5. Por tanto el área del diagrama de momentos es el mismo (Ec. F.37). pL3 12 (Ec. F.37) En los apoyos 0 y 3 el momento es nulo, M 0 M 3 0 . El momento del apoyo 1 se calcula aplicando el terorema de los 3 momentos (Ec. F.38). Por simetría, M1 M 2 . pL 3 L pL 3 L pL3 → 6M 1 L M 0 L 2M 1 L L M 2 L 6 2 12 L 2 12 L 2 M1 pL2 10 → 2 → M 1 0,100 pL (Ec. F.38) Esfuerzos cortantes Apartir de la Ecuación F.2 se calculan las reacciones en 0 (Ec. F.39), 1 (Ec. F.40) y 2 (Ec. F.41). R0 R ' 0,1 M 1 M 0 pL pL L 2 10 R1 R '1,0 R '1, 2 → R0 0,400 pL M 0 M 1 M 2 M 1 p p pL → R1 1,100 pL L L 2 2 10 R2 R1 → R2 1,100 pL (Ec. F.39) (Ec. F.40) (Ec. F.41) Pág. 198 Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 Diagramas de momentos flectores y esfuerzos cortantes A partir del valor de las reacciones y cargas se obtiene el diagrama de esfuerzos cortantes. Se calcula el esfuerzo cortante en el tramo 0-P (Ec. F.42), en el tramo P-1 (Ec. F.43), en el tramo 1-P (Ec. F.44), en el tramo P-2 (Ec. F.45), en el tramo 2-P (Ec. F.46), en el tramo P-3 (Ec. F.47), T0 P R0 → T0 P 0,400 pL (Ec. F.42) TP1 R0 P 0,400 pL pL → TP1 0,600 pL (Ec. F.43) T1P 0,600 pL R1 0,600 pL 1,100 pL → T1P 0,500 pL (Ec. F.44) TP 2 0,500 pL pL → TP 2 0,500 pL (Ec. F.45) T2 P 0,500 pL R2 0,500 pL 1,100 pL → T2 P 0,600 pL (Ec. F.46) TP 3 0,600 pL pL → TP 3 0,400 pL (Ec. F.47) Fig. F.13 Diagrama de esfuerzos cortantes Se calculan los valores de momento flector en el tramo 0-1 (Ec. F.48) M 01 0,400 pLx px 2 2 (Ec. F.48) Para obtener el la sección donde el momento es máximo en el tramo 0-1, se iguala a cero la expresión de la derivada del momento en el tramo 0-1 (Ec. F.49). M 01 x 0,400 pLx AC px 2 0 → x 0,400 pL px → x 0,400L 2 (Ec. F.49) Substituyendo este valor en la expresión del momento en el tramo 0-1 (Ec. F.48) se obtiene el valor de momento máximo en el tramo (Ec. F.50). Anexos A, B, C, D, E y F Pág. 199 01 M máx M 01 x 0,400 L 0,400 pL0,400 L p0,400 L 2 2 2 → M máx. 0,08 pL (Ec. F.50) El momento máximo en el tramo 12, por simetría está situado en la sección central de la viga (Ec. F.51). 2 12 M máx L p L L L L 2 M 02 x L 0,400 pL L 1,100 pL L → 2 2 2 2 12 M máx 0,600 pL2 1,125 pL2 0,55 pL2 → M máx. 0,025 pL2 (Ec. F.51) Fig. F.14 Diagrama de momentos flectores F.5 Viga continua de dos vanos desiguales con carga repartida En la siguiente figura, Fig. F.15, se muestra una viga continua de dos vanos desiguales a la que se le ha aplicado una carga repartida a lo largo de los dos vanos. p 0 L 1 2 kL Fig. F.15 Viga de dos vanos desiguales con carga repartida Momentos Flectores El diagrama de momentos para el tramo 0-1, y el del tramo 1-2, es el mismo que el indicado en el capítulo F.2 Viga continua de dos vanos iguales con carga repartida, Fig. F.6. En este caso la longitud del segundo vano es mayor, por tanto el área del diagrama de momentos no es el mismo. A continuación se indican los valores de Ω para el tramo 0-1, Ω1 (Ec. F.52) y para el tramo 1-2, Ω2 (Ec. F.53). Pág. 200 Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 1 pL3 12 (Ec. F.52) 2 pk 3 L3 12 (Ec. F.53) En los apoyos 0 y 3 el momento es nulo, M 0 M 3 0 . El momento del apoyo 1 se calcula aplicando el teorema de los 3 momentos (Ec. F.54). 3 pL 3 L pk 3 L 3 L → 2M 1 L1 k 6 pL 1 k 3 → M 0 L 2M 1 L kL M 2 kL 6 24 12 L 2 12kL 2 M1 pL2 1 k 3 pL2 k 2 k 1 81 k 8 (Ec. F.54) Reacciones A partir de la Ecuación F.2 se calculan las reacciones en 0 (Ec. F.55), 1 (Ec. F.56). R0 R ' 0,1 M1 M 0 L R1 R '1,0 R '1, 2 R1 R0 → pL pL k 2 k 1 2 8 (Ec. F.55) M 0 M 1 M 2 M 1 pL1 k 1 k pL2 1 k 3 → L kL 2 8Lk pL1 k 1 k pL k 2 k 1 2 8k (Ec. F.56) Diagramas de momentos flectores y esfuerzos cortantes A partir del valor de las reacciones y cargas se obtiene el diagrama de esfuerzos cortantes. Se calcula el esfuerzo cortante en el tramo 0-1 (Ec. F.57), y el esfuerzo cortante en las secciones 0 (Ec. F.58), 1 por el lado izquierdo (Ec. F.59) y por el lado derecho (Ec. F.60). También se calcula el esfuerzo cortante en la sección 1-2 (Ec. F.61) y en la sección 2 (Ec. F.62) T01 R0 px (Ec. F.57) T0 T01 x 0 R0 T1izq T01 x L pL pL k 2 k 1 2 8 pL pL k 2 k 1 pL 2 8 T1der T1izq R1 T1der T0 → → T1izq (Ec. F.58) pL pL k 2 k 1 2 8 (Ec. F.59) pL pL k 2 k 1 pL1 k 1 k pL k 2 k 1 → 2 8 2 8k pLk pL k 2 k 1 2 8k (Ec. F. 60) Anexos A, B, C, D, E y F Pág. 201 pLk pL k 2 k 1 px 2 8k T12 T1der px T2 T12 x kL (Ec. F.61) pLk pL k 2 k 1 pkL 2 8k (Ec. F. 62) Se calculan los valores de momento flector en el tramo 0-1 (Ec. F.63) M 01 R0 x px 2 pLx pL k 2 k 1 x px 2 2 2 8 2 (Ec. F.63) Para obtener la sección donde el momento es máximo en el tramo 0-1, se iguala a cero la expresión de la derivada del momento en el tramo 0-1 (Ec. F.64). M 01 pL pL k 2 k 1 L 3 k k2 px 0 → x R0 x 2 8 8 (Ec. F.64) Substituyendo este valor en la expresión del momento en el tramo 0-1 (Ec. F.63) se obtiene el valor de momento máximo en el tramo (Ec. F.65). L 3 k k2 01 M máx M 01 x 8 01 M máx pLx pLk pL pL k 2 k 1 2 8 2 2 2 k 1 x px 2 → 8 2 2 2 R0 2 (Ec. F.65) Se calculan los valores de momento flector en el tramo 1-2 (Ec. F.66) M 12 M 1 px 2 pL2 k 2 k 1 px 2 k 8 k (Ec. F.66) Para obtener el la sección donde el momento es máximo en el tramo 1-2, se iguala a cero la expresión de la derivada del momento en el tramo 1-2 (Ec. F.67). M 12 pLk pL k 2 k 1 kpL pL2 k 2 k 1 px 0 → x x 2 8k 2 8k (Ec. F.67) Substituyendo este valor en la expresión del momento en el tramo 1-2 (Ec. F. 66) se obtiene el valor de momento máximo en el tramo (Ec. F.68). Pág. 202 Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 pL k kpL pL2 k 2 k 1 12 M máx M 12 x 2 8k 12 M máx 2 k 1 px 2 8 k 2 pL2 k 2 k 1 p kpL pL2 k 2 k 1 8 k 2 8k → 2 (Ec. F.68) En función de los valores de k, el diagrama de esfuerzos cortantes y flectores varía. En la figura F.16 se indican los diagramas para el caso de k entre 1,10 y 2,30, en la figura F.17 para k comprendidas entre 2,40 y 3,00. DEC DMF Fig. F.16 Diagrama de esfuerzos cortantes y momento flector para viga con carga repartida y k entre 1,10 y 2,30 En la tabla F.1 se indican los valores a, b, c y d del diagrama de esfuerzos cortantes y los valores e, f y g del diagrama de momentos flectores indicados en la Fig. F.17 para k entre 1,10 y 2,30. Relación entre tramos k 1,10 1,20 1,30 1,40 1,50 1,60 1,70 1,80 1,90 2,00 2,10 2,20 2,30 Esfuerzos cortantes a 0,361 0,345 0,326 0,305 0,281 0,255 0,226 0,195 0,161 0,125 0,086 0,045 0,001 b 0,639 0,655 0,674 0,695 0,719 0,745 0,774 0,805 0,839 0,875 0,914 0,955 0,999 c 0,676 0,729 0,784 0,839 0,896 0,953 1,011 1,069 1,128 1,188 1,247 1,307 1,367 Momentos Flectores d 0,424 0,471 0,516 0,561 0,604 0,647 0,689 0,731 0,772 0,813 0,853 0,893 0,933 e 0,065 0,060 0,053 0,047 0,040 0,033 0,026 0,019 0,013 0,008 0,004 0,001 0,000 f 0,139 0,155 0,174 0,195 0,219 0,245 0,274 0,305 0,339 0,375 0,414 0,455 0,499 g 0,090 0,111 0,133 0,157 0,183 0,209 0,237 0,267 0,298 0,330 0,364 0,399 0,435 Tabla F.1 Valores del diagrama de esfuerzos cortantes y momentos flectores de una viga de dos tramos desiguales con valores de k entre 1,10 y 2,30 Anexos A, B, C, D, E y F Pág. 203 La tabla F.1 se desglosa según: a 0,5 f e c b 0,5 f a2 2 f k 2 k f 2 k d k f 2 k k 1 d2 g 8 2 DEC DMF Fig. F.17 Diagrama de esfuerzos cortantes y momento flector para viga con carga repartida y k entre 2,40 y 3,00 En la tabla F.2 se indican los valores a, b, c y d del diagrama de esfuerzos cortantes y los valores f y g del diagrama de momentos flectores indicados en la Fig. F.17 para k entre 2,40 y 3,00. Relación entre tramos k 2,40 2,50 2,60 2,70 2,80 2,90 3,00 Esfuerzos cortantes a 0,045 0,094 0,145 0,199 0,255 0,314 0,375 b 1,045 1,094 1,145 1,199 1,255 1,314 1,375 c 1,397 1,455 1,513 1,571 1,628 1,686 1,743 Momentos Flectores d 0,973 1,013 1,052 1,091 1,130 1,169 1,208 f 0,545 0,594 0,645 0,699 0,755 0,814 0,875 g 0,473 0,513 0,553 0,595 0,639 0,684 0,730 Tabla F.2 Valores del diagrama de esfuerzos cortantes y momentos flectores de una viga de dos tramos desiguales con valores de k entre 2,40 y 3,00 La tabla F.2 se desglosa según: a 0,5 f d k f 2 k f k 2 k f 2 k d2 g 2 c b 0,5 f k 1 8 Pág. 204 Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 F.6 Viga continua de tres vanos desiguales con carga repartida En la siguiente figura, Fig. F.18, se muestra una viga continua de tres vanos, siendo los extremos de longitud L y el central de longitud k·L , a la que se le ha aplicado una carga repartida. p 0 1 L 3 2 KL L Fig. F.18 Viga de tres vanos desiguales con carga repartida Momentos Flectores El diagrama de momentos para el tramo 0-1, y el del tramo 1-2, es el mismo que el indicado en el capítulo F.2 Viga continua de dos vanos iguales con carga repartida, Fig. F.6 (Tomo I Anexos). En este caso la longitud del segundo vano es menor al de los otros dos tramos, por tanto el área del diagrama de momentos no es exactamente el mismo. A continuación se indican los valores de Ω para el tramo 0-1, Ω1 (Ec. F.69) y para el tramo 12, Ω2 (Ec. F.70) para el tramo 2-3, Ω3= Ω1. 1 pL3 12 (Ec. F.69) 2 pk 3 L3 12 (Ec. F.70) En los apoyos 0 y 3 el momento es nulo, M 0 M 3 0 . El momento del apoyo 1 se calcula aplicado el teorema de los 3 momentos (Ec. F.71). Por simetría M1 M 2 . pL 3 L pk 3 L 3 L → M 0 L 2M 1 L kL M 2 kL 6 12 L 2 12kL 2 2M 1 L1 k M 1kL M1 pL2 1 k 3 42 3k 6 pL3 1 k 3 24 pL3 pk 3 L3 → 24 24 → 2M 1 L 3M 1kL 6 (Ec. F.71) Anexos A, B, C, D, E y F Pág. 205 Reacciones A partir de la Ecuación F.2 se calculan las reacciones en 0 (Ec. F.72), 1 (Ec. F.73). R0 R ' 0,1 M1 M 0 L (Ec. F.72) M 0 M 1 M 2 M 1 pL pLk pL 1 k 3 L kL 2 2 42 3k R1 R '1,0 R '1, 2 R1 pL pL 1 k 3 2 42 3k R0 → → pL1 k pL 1 k 3 2 42 3k (Ec. F.73) Diagramas de momentos flectores y esfuerzos cortantes A partir del valor de las reacciones y cargas se obtiene el diagrama de esfuerzos cortantes. Se calcula el esfuerzo cortante en el tramo 0-1 (Ec. F.74), y el esfuerzo cortante en las secciones 0 (Ec. F.75), 1 por el lado izquierdo (Ec. F.76) y por el lado derecho (Ec. F.77). También se calcula el esfuerzo cortante en la sección 1-2 (Ec. F.78) y en la sección 2 por el lado izquierdo (Ec. F.79) y por el lado derecho (Ec. F.80). Por último se calcula el esfuerzo cortante por en la sección 2-3 (Ec. F.81) y en la sección 3 (Ec. F.82). T01 R0 px → T01 T0 T01 x 0 R0 → T0 T1izq T01 x L T2der (Ec. F.75) izq → T1 pL pL 1 k 3 2 42 3k pLk pL pL 1 k 3 pL1 k pL 1 k 3 der → T1 2 2 42 3k 2 42 3k pLk px 2 T2izq T12 x kL T2der (Ec. F.74) pL pL 1 k 3 2 42 3k pL pL 1 k 3 pL 2 42 3k T1der T1izq R1 T12 T1der px pL pL 1 k 3 px 2 42 3k pLk pkL 2 (Ec. F.76) (Ec. F.77) (Ec. F.78) → T2izq pLk 2 (Ec. F.79) pLk pLk pL1 k pL 1 k 3 R2 → 2 2 2 42 3k pL pL 1 k 3 2 42 3k (Ec. F.80) Pág. 206 Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 T23 T2der px pL pL 1 k 3 px 2 42 3k T3 T23 x L pL pL 1 k 3 pL pL 1 k 3 pL → T3 2 42 3k 2 42 3k (Ec. F.81) (Ec. F.82) TRAMO 0-1 Se calculan los valores de momento flector en el tramo 0-1 (Ec. F.83). M 01 R0 x px 2 pLx pL 1 k 3 x px 2 2 2 42 3k 2 (Ec. F.83) Para obtener la sección donde el momento es máximo en el tramo 0-1, se iguala a cero la expresión de la derivada del momento en el tramo 0-1 (Ec. F.84). L L 1 k3 M 01 pL pL 1 k 3 px 0 → x 2 42 3k x 2 42 3k (Ec. F.84) Substituyendo este valor en la expresión del momento en el tramo 0-1 (Ec. F.83) se obtiene el valor de momento máximo en el tramo (Ec. F.85). L L 1 k 3 pLx pL 1 k 3 x px 2 01 M máx M 01 x 2 42 3k 2 42 3k 2 01 M máx p L L 1 k 3 x 2 2 42 3k → 2 (Ec. F.85) TRAMO 1-2 Se calculan los valores de momento flector en el tramo 1-2 (Ec. F.86) M 12 M 1 px 2 pL2 1 k 3 px 2 k 42 3k k (Ec. F.86) Para obtener el la sección donde el momento es máximo en el tramo 1-2, se iguala a cero la expresión de la derivada del momento en el tramo 1-2 (Ec. F.87). kL M 12 pLk px 0 → x 2 x 2 (Ec. F.87) Anexos A, B, C, D, E y F Pág. 207 Substituyendo este valor en la expresión del momento en el tramo 1-2 (Ec. F.86) se obtiene el valor de momento máximo en el tramo (Ec. F.88). kL pL2 1 k 3 px 2 pL2 1 k 3 pkL2 12 12 M máx M 12 x → M máx 2 42 3k k 42 3k 4 (Ec. F.88) TRAMO 2-3 Se calculan los valores de momento flector en el tramo 2-3 (Ec. F.89) M 23 M 2 px 2 pL2 1 k 3 px 2 k 42 3k k (Ec. F.89) Para obtener la sección donde el momento es máximo en el tramo 2-3, se iguala a cero la expresión de la derivada del momento en el tramo 2-3 (Ec. F.90). L L 1 k3 M 23 pL pL 1 k 3 px 0 → x 2 42 3k x 2 42 3k (Ec. F.90) Substituyendo este valor en la expresión del momento en el tramo 2-3 (Ec. F. 89) se obtiene el valor de momento máximo en el tramo (Ec. F.91). L L 1 k 3 pL2 1 k 3 px 2 23 M máx M 23 x 2 42 3k 42 3k k 23 M máx → L L 1 k 3 pL2 1 k 3 p L L 1 k 3 M 23 x 2 42 3k 42 3k k 2 42 3k 2 (Ec. F.91) DEC DMF Fig. F.19 Diagrama de esfuerzos cortantes y momento flector para viga con carga repartida de 3 vanos desiguales y k entre 0,60 y 0,90 Pág. 208 Fórmulas analíticas y tablas de cálculo para estructuras metálicas según el Eurocódigo3 En la tabla F.3 se indican los valores a, b, y c del diagrama de esfuerzos cortantes y los valores e, f y g del diagrama de momentos flectores indicados en la Fig. F.19 para k entre 0,60 y 0,90. Relación entre tramos k 0,60 0,70 0,80 0,90 Esfuerzos cortantes a 0,420 0,418 0,414 0,408 b 0,580 0,582 0,586 0,592 Momentos Flectores c 0,300 0,350 0,400 0,450 e 0,088 0,087 0,086 0,083 f 0,080 0,082 0,086 0,092 g 0,035 0,021 0,006 0,009 Tabla F.3 Valores del diagrama de esfuerzos cortantes y momentos flectores de una viga de tres tramos desiguales con valores de k entre 0,60 y 0,90 La tabla F.3 se desglosa según: a 0,5 f b 0,5 f a2 e 2 f k 2 k2 g f 8 c 1 k 3 42 3k DEC DMF Fig. F.20 Diagrama de esfuerzos cortantes y momento flector para viga con carga repartida de 3 vanos desiguales y k entre 1,10 y 2,00 Anexos A, B, C, D, E y F Pág. 209 En la tabla F.4 se indican los valores a, b, y c del diagrama de esfuerzos cortantes y los valores e, f y g del diagrama de momentos flectores indicados en la Fig. F.20 para k entre 1,10 y 2,00. Relación entre tramos k 1,10 1,20 1,30 1,40 1,50 1,60 1,70 1,80 1,90 2,00 Esfuerzos cortantes a 0,390 0,378 0,365 0,349 0,332 0,313 0,292 0,269 0,245 0,219 b 0,610 0,622 0,635 0,651 0,668 0,687 0,708 0,731 0,755 0,781 Momentos Flectores c 0,550 0,600 0,650 0,700 0,750 0,800 0,850 0,900 0,950 1,000 e 0,076 0,072 0,066 0,061 0,055 0,049 0,043 0,036 0,030 0,024 f 0,110 0,122 0,135 0,151 0,168 0,187 0,208 0,231 0,255 0,281 g 0,041 0,058 0,076 0,094 0,113 0,133 0,153 0,174 0,196 0,219 Tabla F.4 Valores del diagrama de esfuerzos cortantes y momentos flectores de una viga de tres tramos desiguales con valores de k entre 1,10 y 2,00 La tabla F.4 se desglosa según: a 0,5 f e a2 2 f k 2 k2 g f 8 c b 0,5 f 1 k 3 42 3k