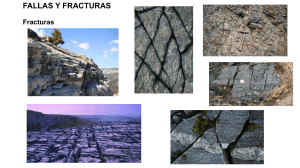
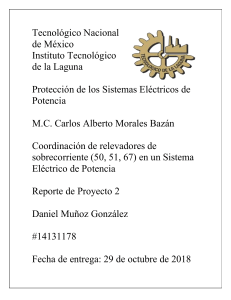
INSTITUTO TECNOLOGICO DE MEXICALI “UNIDAD 5: PROTECCIONES Y SU COORDINACION” ALUMNO: J. JESUS HIGAREDA AGUAYO (18491016) I.E. INDSUTRIALES, DOCENTE: ROBERTO ISSAC ESPINIOZA AGUILAR ENTREGADO EN LA FECHA: 03/04/2019 1 INDICE INTRODUCCION ................................................................................................................................... 4 5.1 CRITERIOS GENERALES DE SELECCIÓN DE PROTECCIONES. FILOSOFÍA DE LA COORDINACIÓN ... 6 5.1.1 Esquemas de protección con relevadores. ............................................................................ 6 5.1.2. Interruptores de potencia. .................................................................................................... 6 5.1.3. Objetivo de un Estudio de Coordinación de Protecciones. ................................................... 7 5.1.4. Metodología del Estudio de Coordinación de Protecciones. ................................................ 8 5.1.5. Aspectos Generales de la Coordinación de Protecciones ................................................... 10 5.2. CURVAS DE TIEMPO-CORRIENTE DE RELEVADORES, FUSIBLES Y DISPOSITIVOS DE PROTECCIÓN DE SOBRECORRIENTE PARA ALTA, MEDIA Y BAJA TENSIÓN ............................................................. 11 5.2.2. Fusibles ................................................................................................................................ 11 5.2.3. Restauradores ..................................................................................................................... 14 5.2.4. Relevadores (Relés o “Relays”) ........................................................................................... 17 5.2.4.1. Tipos de relés según sus características de tiempo de operación ............................... 17 5.3. PROTECCIÓN DE TRANSFORMADORES. PUNTOS ANSI E INRUSH.............................................. 19 5.3.1. Criterios para el ajuste de las protecciones de sobrecorriente del transformador. ........... 20 5.3.2. Esquemas de protección para transformadores de potencia mayores de 10 MVA ........... 21 5.3.3. Esquemas de protección para transformadores de potencia menores de 10 MVA ........... 24 5.4 PROTECCIÓN DE MOTORES DE BAJA Y MEDIA TENSIÓN. SELECCIÓN DE INTERRUPTORES Y FUSIBLES ............................................................................................................................................ 26 5.4.1. Protección de motores eléctricos según el código eléctrico nacional ................................ 26 5.4.1.1. El Seccionamiento. ....................................................................................................... 26 5.4.1.2. La Protección Automática contra Cortocircuito ........................................................... 27 5.4.1.3. El Dispositivo para Maniobras ...................................................................................... 27 5.4.1.4. La Protección contra Sobrecarga ................................................................................. 27 5.4.2 Generalidades de los controladores lógicos programables en sistemas de protecciones de motores ......................................................................................................................................... 29 5.4.2.1. Temperatura Máxima................................................................................................... 29 5.4.2.2. Clase de Aislamiento .................................................................................................... 29 5.4.2.3. Balance de Fases. ......................................................................................................... 30 5.4.2.4. “Single-Phasing” ........................................................................................................... 30 5.4.2.5. Rotación del eje ............................................................................................................ 31 2 5.4.2.6. Velocidad de rotación .................................................................................................. 31 5.4.2.7. Vibraciones ................................................................................................................... 31 5.4.2.8. Nº de arranques y paradas ........................................................................................... 31 5.4.2.9. Humedad en el aislamiento ......................................................................................... 31 5.4.2.10. Falla a Tierra. .............................................................................................................. 32 5.4.2.11. Fallas de aislamiento. ................................................................................................. 32 5.4.2.12. Tiempo máximo de rotor bloqueado. ....................................................................... 32 5.4.2.13. Bloqueo de rotor durante la marcha ......................................................................... 33 5.4.2.14. Marcha en vacío ......................................................................................................... 33 5.4.2.15. Inversión del sentido de giro ...................................................................................... 33 5.4.3. Selección y ajuste de los dispositivos de protección........................................................... 34 5.4.3.1. Fusibles ......................................................................................................................... 34 5.4.3.2. Relés Bimetálicos......................................................................................................... 34 5.4.3.3. Interruptores Magnéticos ............................................................................................ 35 5.4.3.4 Interruptores Termo-magnéticos.................................................................................. 35 5.5 PROTECCIÓN DE ALIMENTADORES PRIMARIOS. SELECCIÓN DE FUSIBLES Y RELEVADORES. ..... 36 5.6 COORDINACIÓN ENTRE DISPOSITIVOS PRIMARIOS Y SECUNDARIOS. SELECCIÓN Y AJUSTE. NOMENCLATURA Y NORMALIZACIÓN DE RELEVADORES DE PROTECCIÓN. .................................... 38 CONCLUSION ..................................................................................................................................... 39 3 INTRODUCCION El objetivo principal y primordial de todos los sistemas de potencia es el mantener en un alto nivel la continuidad del servicio, y que cuando ocurran condiciones intolerables, reducir el número de cortes de energía eléctrica. Las pérdidas de potencia, y sobre voltajes ocurren de cualquier manera, porque es imposible y también poco práctico, poder evitar las consecuencias de eventos naturales y accidentes físicos; como son fallas del equipo, o mala operación debido a errores humanos. Muchas de estas fallas resultan de: descuidos, conexiones accidentales o "descargas" entre conductores de fase o de un conductor de fase a tierra. Las causas naturales que pueden provocar cortos circuitos (fallas) son descargas atmosféricas (voltaje inducido o descarga directa en el conductor), viento, hielo, terremotos, fuego, explosiones, árboles caídos sobre las líneas, objetos voladores, contactos físico de animales y contaminación. Los accidentes incluyen las fallas resultantes de choques de vehículos con los postes o equipo vivo, así como el sabotaje por parte de las personas a las instalaciones y equipos del sistema eléctrico de potencia. Se hace un esfuerzo considerable para reducir los posibles daños, pero la eliminación de todos estos problemas semejantes aún no es posible. La mayoría de fallas en un sistema eléctrico de distribución con red de líneas aéreas son fallas de fase a tierra, producto de las descargas atmosféricas, que inducen un alto voltaje transitorio y dañan o flamean el aislamiento. En los sistemas aéreos de distribución, el contacto de árboles con líneas originado por viento es otra fuente de fallas. El hielo, nieve y viento durante tormentas severas pueden originar muchas fallas y daños, al equipo. En algunos casos la descarga originada por eventos de esta naturaleza, no causan daño permanente si el circuito es interrumpido rápidamente. Esta interrupción rápida es una práctica común. Pero en muchos casos se produce una sobre - tensión en la tensión nominal del sistema causada por este corte momentáneo de energía. El tiempo promedio del corte de energía esta en el orden del ½ a 1 ó 2 minutos que es un buen tiempo en comparación con muchos minutos y horas que puede estar fuera el sistema. 4 Las fallas originadas en el sistema no siempre suministran cambios significativos de las cantidades eléctricas del sistema que pueden ser usadas para distinguir las condiciones tolerables de las no tolerables por el sistema. Estos cambios cuantitativos, incluyen sobre corriente, sobre o bajo voltaje, potencia, factor de potencia, dirección de la corriente, impedancia, frecuencia, temperatura, movimientos físicos y presión. También la acumulación de contaminación en el aislamiento es una fuente de falla muy común que es impredecible y que generalmente significa un incremento en la corriente, por lo que la protección de sobre - corriente es muy aplicada. La protección es la ciencia, técnica o arte de aplicar y seleccionar relevadores y / o fusibles para proporcionar la máxima sensibilidad para la detección de las fallas o condiciones indeseables, y no obstante, evitar su operación en todas las condiciones permisibles o tolerables. 5 5.1 CRITERIOS GENERALES DE SELECCIÓN DE PROTECCIONES. FILOSOFÍA DE LA COORDINACIÓN 5.1.1 Esquemas de protección con relevadores. Los diseños y presentaciones específicas varían mucho con los requerimientos de aplicación, las diferencias de construcción, y el tiempo de operación del diseño en particular. Originalmente, todos los relevadores de protección fueron del tipo electromagnético, y electromecánico que siguen estando en gran uso, pero los diseños de estado sólido están proliferando. Los relevadores de estado sólido son usados en sistemas de protección de bajo voltaje donde el relevador y el circuito del interruptor automático son una unidad común. Aquí los relevadores electromecánicos fueron generalmente y relativamente inexactos, algunas veces insensibles, y difícilmente conservan las condiciones. Es en este caso donde los relevadores de estado sólido son hoy en día muy efectivos. 5.1.2. Interruptores de potencia. Los relevadores de protección haciendo una comparación sobre el "cerebro" para censar disturbios, pero como mecanismo de baja energía no son capaces de interrumpir y aislar el área con problemas del sistema de potencia. Los interruptores de potencia en sus distintos tipos son el "músculo" que puede aislar la falla. De esta manera los relevadores 6 de protección y los interruptores de potencia son los equipos necesarios para el rápido aislamiento de un área con problemas ó equipos dañados. Un relevador de protección sin un interruptor no tiene valor, excepto posiblemente para alarma. Así también, un interruptor sin relevadores tiene mínimo valor, esté podrá ser usado solamente para energizar o desenergizar manualmente el equipo o los circuitos. 5.1.3. Objetivo de un Estudio de Coordinación de Protecciones. Los objetivos de un sistema eléctrico de protección y coordinación son prevenir el daño al personal, minimizar el daño a los componentes del sistema y limitar la extensión y duración de la interrupción del servicio cuando una falla en el equipo, error humano o condicionas naturales adversas ocurran en cualquier porción del sistema. Las circunstancias que causan mal funcionamiento del sistema son usualmente impredecibles, en base a un excelente diseño y un programa de mantenimiento preventivo pueden reducir que las fallas sucedan. El sistema eléctrico debe ser diseñado y mantenido de modo que se proteja automáticamente. La prevención del daño humano es el objetivo más importante de un sistema eléctrico de protecciones. Los dispositivos de interrupción 7 deben tener adecuada capacidad interruptiva y las partes energizadas deben estar lo suficientemente aisladas o contenidas dentro de un gabinete, esto para no exponer al personal a una explosión, fuego o arqueo. 5.1.4. Metodología del Estudio de Coordinación de Protecciones. El análisis de corto circuito es el punto de partida para el estudio de coordinación de protecciones. Este estudio se basa en la memoria de cálculo de corto circuito, además de las características nominales de todos los equipos y dispositivos seleccionados en esta red. La metodología para el estudio de coordinación de protecciones de sobrecorriente consiste en determinar los puntos de operación de las curvas de los dispositivos de protección y conjuntamente con las curvas características tiempo-corriente de los elementos serie del sistema, los cuales se expresan en ejes logarítmicos, para dar como resultado la gráfica final de coordinación. El dispositivo de protección próximo a una carga específica debe operar rápidamente, de acuerdo a los tiempos establecidos, operando con cierto retraso de tiempo la siguiente protección que está hacia la fuente. De esta manera se deben cumplir las limitaciones que los dispositivos de protección imponen unos a otros, además de los límites naturales de operación de los equipos, como son: Corriente de inrush o energización de los transformadores: La corriente de inrush se representa como un punto. El valor de esta corriente es de 8 a 12 veces la corriente nominal del transformador, la cual se presenta en un tiempo de 0.1 segundos. Curvas de daño de los cables y transformadores: Los equipos y accesorios deben soportar las altas temperaturas ocasionadas por el exceso de corriente. Estos límites deben quedar por encima de las curvas de las protecciones, para evitar que sufran daños si esta no llega a operar; en lo que opera la protección de respaldo. La curva de daño de los conductores está definida 8 por la ecuación de Ordendonk, siendo conocida para los transformadores como curva ANSI; esta curva determina los puntos y establece las características que deben cumplir los devanados para soportar, sin resultar dañados, los esfuerzos térmicos y magnéticos producidos por corto circuitos en sus terminales. Perfil de arranque de los motores: En el estudio de las protecciones, es necesario considerar el análisis de motores eléctricos, sobre todo los de mayor potencia. Esta representación conocida como perfil de arranque del motor, está definido por las corrientes de rotor bloqueado, corriente de arranque y la corriente de operación nominal; cada una en sus respectivos tiempos de operación en función de las características nominales de operación normal y transitoria de cada motor. Cargas estáticas ó resistivas, etcétera: Las cargas fijas, tales como iluminación, resistencias, fuerza, etc. no tienen mayores exigencias en el proceso de coordinación y ajuste, pues estas cargas no implican la presencia de grandes transitorios electromecánicos en su operación, y al estar alejadas de las fuentes de potencia, da como resultado un bajo nivel de corriente de falla. Por estas razones regularmente no son representadas en el estudio. La finalidad del estudio es que los dispositivos de protección operen dentro de estos límites o fronteras, y a la vez proporcionen una coordinación selectiva entre los diferentes dispositivos de protección y las curvas y/o perfiles de arranque y operación de los equipos. Para la selección y ajuste de protecciones se deben tomar las características que definen el comportamiento de una coordinación ideal: 9 a) Sensibilidad. Define la característica por medio de la cual todos los dispositivos deben operar con señales relativamente pequeñas. b) Selectividad. Esta característica, sostiene que al presentarse una falla en el sistema, deberá operar la protección más cercana al punto de falla, garantizando con esto la continuidad del servicio al resto de la instalación. c) Velocidad. Es una característica fundamental, pues la rapidez con que se despeje la sobre corriente es de suma importancia para disminuir al máximo los daños en la zona de falla. La velocidad depende de la magnitud de la sobre corriente y de la coordinación con las demás protecciones. d) Confiabilidad. Esta característica en conjunto con la velocidad de despeje es de los puntos más importantes, ya que un relevador digital puede ser muy rápido y en un momento crítico puede fallar. Por esta razón las protecciones seleccionadas deben corresponder a una manufactura de primera calidad. e) Costo. La selección de un esquema específico de coordinación de protecciones, equipos y secuencias de operación, tiene como principal objetivo el proteger y aislar la zona fallada, evitando así que esta se extienda hacia más equipos. El costo de los esquemas depende de su selectividad, y por lo tanto se evalúa el punto óptimo o de equilibrio entre el costo y la selectividad de la protección. 5.1.5. Aspectos Generales de la Coordinación de Protecciones Una protección efectiva requiere que el dispositivo de protección sea seleccionado, calibrado, y ajustado para permitir circular la corriente normal de carga del equipo y sólo abriendo instantáneamente o con un retardo de tiempo cuando se presente un valor de corriente que sobrepase el umbral definido del flujo de corriente. Para la mayor continuidad en el servicio se requiere que los dispositivos operen con esta selectividad. El máximo servicio y la máxima continuidad son aspectos difíciles de equilibrar en el proceso de coordinación de las protecciones, por lo que lógicamente se prefiere la protección ante la coordinación selectiva. 10 El proceso de coordinación de protecciones implica necesariamente el uso de curvas tiempo-corriente de los distintos elementos de protección que intervienen. Esto obliga a considerar ciertos intervalos de tiempo entre las curvas y dispositivos de protección, ya que es la única forma de garantizar una operación secuencial correcta. La coordinación de los intervalos de tiempo de los dispositivos de protección se determina de acuerdo con los siguientes parámetros: La magnitud de la corriente de falla en el punto que se esté protegiendo. Características del detector del dispositivo de protección. La sensibilidad del dispositivo de protección correspondiente a las magnitudes de las corrientes de falla. El margen de tiempo que se presenta entre el detector del dispositivo de protección y el propio tiempo de apertura del interruptor. 5.2. CURVAS DE TIEMPO-CORRIENTE DE RELEVADORES, FUSIBLES Y DISPOSITIVOS DE PROTECCIÓN DE SOBRECORRIENTE PARA ALTA, MEDIA Y BAJA TENSIÓN 5.2.2. Fusibles El estudio de los fusibles y su aplicación es una disciplina extensa y compleja que está más allá del alcance de este documento. Sin embargo, históricamente y técnicamente, los fusibles forman la base de la protección, particularmente para los alimentadores radiales. Sus voltajes operan entre el nivel de voltaje de 2.4 y 34.5 kV, aquí el fusible es el más viejo, más simple y predominante de todos los dispositivos de protección. El fusible, un elemento de aleación metálica, es un detector de nivel y es simultáneamente el sensor y el dispositivo de interrupción. Se instala en serie con el equipo que se está protegiendo y 11 opera por fusión de un elemento fusible en respuesta al flujo de corriente eléctrica superior a un valor predeterminado. Las características del fusible varían considerablemente de un fabricante a otro y las especificaciones particulares deben obtenerse de la literatura apropiada. Por ser los fusibles dispositivos de protección contra sobre-corrientes, estos tienen una curva de operación característica con respecto al tiempo, básicamente su respuesta en el tiempo es inversamente proporcional a la magnitud de la corriente que se le aplique. Todos los fabricantes de fusibles proporcionan dos curvas características de operación: "tiempo mínimo de fusión" (MMT, minimum melting time) "tiempo máximo de despeje" (MCT, maximum clearing time De acuerdo a las normas ANSI C37.41-1981 y su complemento ANSI C37.46-1981. (ver figura 5.3) La curva del tiempo mínimo de fusión (MMT) es el tiempo en el cual el fusible comenzará a fundirse por la acción de una corriente determinada. Dicha curva se usa para coordinar con dispositivos de protección que se encuentran después del fusible en el sentido de circulación de la corriente de falla. Usualmente los fabricantes trazan esta curva, considerando una temperatura ambiente de 25° C y operando el fusible sin carga inicial. Tiempo de arqueo (AC, arcing time), es el intervalo durante el cual persiste el arco eléctrico. La curva del tiempo total de despeje o MCT es el tiempo total en que el fusible interrumpe la circulación de corriente hacia la falla, es decir, toma en cuenta el tiempo desde el principio de la fusión y el desarrollo del arco eléctrico hasta que este se extingue totalmente. Esta curva se usa para coordinar con dispositivos de protección que se encuentran antes del fusible, en el sentido de circulación de la corriente hacia la falla. Esta curva al igual que la MMT se grafica a 25° C y sin carga inicial. 12 Los fabricantes ofrecen una amplia gama de curvas características de operación las cuales tienen diversas denominaciones tales como "K", "T", "H" "153-1", "119-1", etc. En la Figura 5.4 se muestran a manera de ilustración las características MMT y MCT para un fusible de potencia de 10 amperes, velocidad rápida H, marca Chance. 13 5.2.3. Restauradores El restaurador es un dispositivo electromecánico que sirve para reconectar alimentadores primarios de distribución, por lo que son auto controlados para interrumpir y cerrar automáticamente circuitos con una secuencia de cierre y apertura, esta secuencia de operación podrá llevarse a cabo dependiendo el ajuste hasta tres veces seguidos, terminando con una operación definitiva de cierre o apertura. 14 Figura 5.5 Restauradores montados en línea La secuencia de operación realiza dos funciones importantes: Prueba la línea para determinar si la condición de falla ha desaparecido Discrimina las fallas temporales de las permanentes Estudios de sistemas de distribución aérea en todo el mundo han establecido que hasta el 95% de todos los corto-circuitos o fallas son de naturaleza temporal, con una duración de unos cuantos ciclos. Sobre la base de estas estadísticas y observaciones puede reconocerse fácilmente la necesidad de disponer de un equipo con la función de “apertura y re-cierre automático". Los restauradores cuentan con curvas características de tiempo-corriente del tipo definido e inverso. La curva característica definida, significa que el tiempo de operación es independiente a la magnitud de la corriente de falla, es decir, que para cualquier nivel de falla opera en el tiempo seleccionado. 15 Para la curva característica inversa, el tiempo de eliminación varía dependiendo de la magnitud de la corriente de falla, y puede haber distintas demoras, por ejemplo la curva "C" tiene más demora que la curva "B". Actualmente existen una gran cantidad de curvas y denominaciones empleadas por los fabricantes, a continuación se muestran en la (Figura 5.6) curvas empleadas normalmente en los restauradores y corresponden para dicha gráfica a: Curva B3 (Curva muy rápida) Curva B2 (Curva rápida) 16 Curva B1 (Curva lenta) Curva B4 (Curva muy lenta) Además el restaurador puede modificarse para proveer todas las operaciones rápidas, todas las operaciones, demoradas o cualquier combinación de operaciones rápidas seguidas por demoradas. Sin embargo en todos los casos de operaciones rápidas, si las hay, ocurren primero seguidas de las demoradas, hasta llegar a la cantidad seleccionada de operaciones para la apertura definitiva. Por ejemplo para una secuencia 2A-2B, significa que el restaurador efectuara 2 operaciones rápidas con su curva "A" y dos operaciones lentas con su curva "B" y luego queda abierto. De la misma manera se pueden seleccionar 1A-3B, 3A-1B, 0A-4B, según la conveniencia para coordinar con otros dispositivos de protección de la red. Las secuencias señaladas corresponden a un ajuste de 4 operaciones, siendo factible también, el poder disponer de ajustes con 3, 2 ó incluso 1 operaciones; con las correspondientes combinaciones de curvas rápidas y/o lentas. 5.2.4. Relevadores (Relés o “Relays”) Los relés de protección están constituidos por una o más unidades detectoras de falla o “Unidades de Medida”, cuya función es recibir la información del equipo primario y discriminar si existe o no una condición anormal. Para este efecto compara la magnitud eléctrica medida con otra llamada de referencia, que le ha sido proporcionada con anterioridad a través de sus elementos de “ajuste”. En el caso de detectar una condición anormal, emitirá la orden correspondiente a través del resto de los elementos que el relé: Unidades auxiliares, contactos, resistencias, condensadores, 58 alambrados, etc., a objeto de desconectar el sector o equipo comprometido, despejando la falla. 5.2.4.1. Tipos de relés según sus características de tiempo de operación Basado en las características de operación de los relés contra sobrecorriente pueden ser clasificados en tres grupos: corriente definida o instantánea, tiempo definido y tiempo inverso. 17 5.2.4.1.1. Relé de corriente definida o instantáneo Este tipo de relé opera instantáneamente cuando la corriente alcanza un valor predeterminado. El ajuste es escogido de manera que, en la subestación más alejada de la fuente, el relé operará para una corriente de bajo valor y las corrientes de operación de los relés son incrementadas progresivamente en cada subestación, en dirección hacia la fuente. Así, el relé con el ajuste más bajo operará primero y desconecta la carga en el punto más cercano a la falla. Este tipo de protección tiene el inconveniente de tener una baja selectividad para valores elevados de corrientes de cortocircuito. Otra desventaja es la de distinguir entre corriente de falla en un punto u otro cuando la impedancia entre estos puntos es pequeña en comparación con la impedancia de la fuente, llevando a la posibilidad de una pobre discriminación. 5.2.4.1.2. Relé de tiempo definido El ajuste de estos tipos de relé permite ser variado para manejar diferentes niveles de corriente usando diferentes tiempos de operación. Estos ajustes pueden ser calibrados de manera tal que el interruptor más cercano a la falla sea disparado en el tiempo más corto, y luego los interruptores restantes sean disparados sucesivamente, usando tiempos de retardo grandes, moviéndose hacia la fuente. La diferencia entre los tiempos de disparo para la misma corriente se llama tiempo de discriminación. La protección es más selectiva cuando el tiempo de operación de los relés de corriente definida puede ajustarse en pasos fijos. La gran desventaja con este método de discriminación es que las fallas cerca de la fuente, dan como resultado grandes corrientes, que podrían ser eliminadas en un tiempo relativamente largo. 5.2.4.1.3. Relé de tiempo inverso La propiedad fundamental de los relés de tiempo inverso es que ellos operan en un tiempo que es inversamente proporcional a la corriente de falla. La ventaja sobre el relé de tiempo definido es que, para las corrientes muy altas, pueden obtenerse tiempos de disparo más cortos sin el riesgo de la selectividad de la protección. Los relés de tiempo 18 inverso son generalmente clasificados en concordancia con su curva característica que indica la velocidad de operación. Su principio de funcionamiento da origen a una variedad de relés con diversas características de tiempo de operación y pequeñas diferencias de diseño eléctricas y mecánicas. En el caso de los de tipo electromecánico, el relé está basado en una unidad de medida de disco de inducción, ya sea del tipo de espira en cortocircuito o wattimétrica. Figura 5.7 5.3. PROTECCIÓN DE TRANSFORMADORES. PUNTOS ANSI E INRUSH El transformador es el componente más importante dentro de una subestación, ya que es el encargado de transformar los niveles de tensión a sus valores requeridos y también tiene gran relevancia debido a que es el equipo de mayor costo. Por estas razones es indispensable que el transformador cuente con un sistema de protección eficiente para evitar en lo posible que exista una falla que deje fuera de operación este equipo. De acuerdo con la norma CFE-G0000-62 los esquemas de protección se clasifican de la siguiente forma: 19 Transformadores de potencia de dos devanados de 1 a menos de 7.5 MVA. Transformadores de potencia de dos devanados ≥7.5 MVA. Transformadores de potencia de tres devanados ≥10 MVA. Autotransformadores ≥10 MVA. Reactores monofásicos con reactor de Neutro ≥5 MVA. Reactores trifásicos <5 MVA. 5.3.1. Criterios para el ajuste de las protecciones de sobrecorriente del transformador. Para el ajuste de las protecciones de sobrecorriente del transformador es necesario contar con la curva de daño de transformador (ejemplo dado en la figura 5.8) establecida en la norma ANSI/IEEE C57-109-1993, ya que esta nos brinda un límite de seguridad a partir de los cuales se establecen los lineamientos para el ajuste de las protecciones. Figura 5.8 20 5.3.2. Esquemas de protección para transformadores de potencia mayores de 10 MVA Los transformadores mayores de 10 MVA, disponen del esquema de protección más completo con dispositivos de detección interna y externa. Para la protección interna del transformador la más utilizada es el relevador buchholz (figura 5.9.) o también llamada relevador a gas; detecta el flujo de gases originados por fallas incipientes dentro del transformador. Figura 5.9. Relevador Buchholz En la detección externa es utilizada la protección diferencial, misma que por su gran velocidad y selectividad despeja fallas tanto del transformador como de aquellos componentes o equipos que se encuentren dentro de la zona diferencial, que se halla delimitada por la ubicación de los transformadores de corriente. La protección de respaldo está conformada mediante relevadores de sobre-corriente, y debe coordinarse con la protección de los alimentadores de distribución. Sus funciones son proteger al transformador contra fallas en las barras de baja tensión y contra fallas externas en caso de fallar la protección de los alimentadores. Adicionalmente protege al transformador contra condiciones de sobrecarga de cierta magnitud y duración, que pueden provocar sobrecalentamiento en el equipo reduciendo su vida útil. 21 La protección de respaldo está conformada mediante relevadores de sobre-corriente, y debe coordinarse con la protección de los alimentadores de distribución. Sus funciones son proteger al transformador contra fallas en las barras de baja tensión y contra fallas externas en caso de fallar la protección de los alimentadores. Adicionalmente protege al transformador contra condiciones de sobrecarga de cierta magnitud y duración, que pueden provocar sobrecalentamiento en el equipo reduciendo su vida útil. Para la protección de respaldo de fase de los transformadores mayores de 10 MVA, es común seleccionar relevadores de sobre-corriente de tiempo inverso; y para la protección contra fallas de línea a tierra pueden utilizarse relevadores de tiempo inverso o de tiempo definido, los cuales por sus características tiempo-corriente permiten superar el problema de coordinación con los dispositivos de disparo a tierra de los restauradores instalados en los circuitos de distribución. El relevador 5INT para detectar fallas a tierra, debe conectarse del transformador de corriente TC de neutro del transformador de potencia ya que, al circular la corriente de falla directamente por el neutro de transformador, su monitoreo a través de este TC da una mejor sensibilidad que la obtenida en la conexión residual de una estrella. La función de este relevador es despejar las fallas en la barra de baja tensión y respaldar la operación de los relevadores 5IN de los alimentadores. Al disponerse de un interruptor en alta tensión, se recomienda que este relevador actúe sobre el mismo para eliminar las fallas de fase a tierra del devanado de baja tensión del transformador. Los relevadores que se encuentran instalados en el lado de baja tensión deben ser temporizados, por lo que normalmente no disponen o se les deshabilita su unidad instantánea (50). Lo anterior es en razón de que siendo la barra de baja tensión y la salida de los alimentadores, el mismo punto eléctrico (con los mismos niveles de falla); las unidades instantáneas de esta protección operarían simultáneamente con los relevadores del alimentador para fallas dentro del rango de alcance de los elementos instantáneos sobre la red de distribución, no existiendo por tal razón coordinación. 22 Cabe señalar que la protección de respaldo puede tener variantes dependiendo del tipo de relevadores utilizados o de la filosofía de protecciones empleada para su diseño. Entre dichas variantes, se pueden citar las siguientes: Protección de sobre-corriente de fase y neutro únicamente en el lado de baja tensión del transformador. Protección de sobre-corriente de fase únicamente en el lado de alta tensión del transformador y de neutro en el lado de baja tensión del transformador. Protección de sobre-corriente de fase en el lado de alta tensión del transformador, y de neutro más fase y neutro residual en el lado de baja tensión del transformador Adicionalmente, el transformador de potencia cuenta con los siguientes dispositivos internos, mismos que pueden cumplir con las funciones de protección, supervisión o alarma dependiendo del requerimiento establecido: Indicador y relevador de nivel de líquido o aceite aislante (71Q) Válvula y relevador de sobrepresión (63P) Indicador y relevador térmico de líquido o aceite aislante (26Q) Relevador e indicador térmico de sobrecarga del devanado (49T) En la siguiente figura se muestra el diagrama unifilar típico para una subestación con un esquema de protección para una subestación de distribución con un transformador de potencia mayor de 10 MVA e interruptores de circuito. Figura 5.10 23 5.3.3. Esquemas de protección para transformadores de potencia menores de 10 MVA Los transformadores menores de 10 MVA, para la detección de fallas internas no cuentan con la protección diferencial y solo disponen de fusibles de potencia en el lado primario para tal función, coordinados con los relevadores de sobre-corriente de fase y tierra para fallas en las barras de baja tensión y respaldo de los alimentadores. Para la protección externa del transformador se emplean los mismos fusibles de potencia en el lado de alta tensión y relevadores de sobre-corriente en el lado de baja tensión. En este arreglo los fusibles de potencia son los que realmente protegen al transformador y lo aíslan en caso de falla, además de respaldar la función de los relevadores del interruptor de baja tensión. Se utilizan fusibles de potencia preferentemente de velocidad lenta (velocidades rápidas dificultan la coordinación con las protecciones delanteras) y se pueden seleccionar relevadores de sobrecorriente de tiempo extremadamente inverso para una correcta coordinación con la característica tiempo-corriente del fusible. Para la protección contra fallas de línea a tierra se utilizan relevadores de tiempo inverso o de tiempo definido, los cuales por su característica menos inversa permiten superar el problema de coordinación con los dispositivos de disparo a tierra de los restauradores instalados sobre las líneas de distribución. Los relevadores de sobre-corriente de fase operan sobre el interruptor de banco de baja tensión protegiendo al transformador contra sobrecargas sostenidas y evitando que operen los fusibles de potencia cuyo costo es elevado y su tiempo de reposición es considerable. Otra de sus funciones es respaldar la operación de los relevadores de fase de los circuitos, en caso que estos no operen con falla en el alimentador primario. El relevador 5INT para detectar fallas a tierra, debe conectarse del TC de neutro del transformador de potencia ya que, al circular la corriente de falla directamente por el 24 neutro de transformador, su monitoreo a través de este TC da una mejor sensibilidad que la obtenida en la conexión residual de una estrella. La función de este relevador es despejar las fallas en las barras de baja tensión y respaldar la operación de los relevadores 5IN de los alimentadores. Las fallas a tierra en el devanado de baja tensión del transformador son despejadas únicamente por los fusibles de potencia, pero con una reducción en su sensibilidad (58 %), por el efecto de la conexión delta-estrella. Los relevadores que se encuentran asociados para operar sobre el interruptor de banco de baja tensión deben ser temporizados, por lo que normalmente se deshabilita su unidad instantánea (50) ya que siendo la barra y la salida de los alimentadores el mismo punto eléctrico, estos operarían simultáneamente con los relevadores del alimentador para fallas para el rango de alcance de los elementos instantáneos sobre la red de distribución, no existiendo coordinación. Los relevadores para protección interna del transformador, al no contar con equipo de desconexión en alta tensión pierden su utilidad, estos dispositivos pueden aprovecharse si la subestación cuenta con control supervisorio que permita monitorear las señales de alarma por condiciones anormales en el transformador. Para subestaciones que están dentro de este rango de capacidades, el relevador (63P) algunas veces es sustituido por un dispositivo de desfogue tipo "cuello de ganso" obturado por un vidrio que se rompe a una presión critica, permitiendo la salida de gases provocados por falla interna. Ocasionalmente se tienen transformadores de potencia en estas capacidades que cuentan con tanque conservador y poseen también el relevador de flujo y presencia de gases (buchholz). 25 5.4 PROTECCIÓN DE MOTORES DE BAJA Y MEDIA TENSIÓN. SELECCIÓN DE INTERRUPTORES Y FUSIBLES 5.4.1. Protección de motores eléctricos según el código eléctrico nacional En el Código Eléctrico Nacional se establecen los requisitos mínimos para la protección de motores en baja tensión. En todo circuito ramal de motores debe existir al menos: Figura 5.11. 5.4.1.1. El Seccionamiento. Lo provee un dispositivo que sea capaz de abrir el circuito con indicación visual de ON – OFF. El propósito es garantizar la apertura del circuito ramal con seguridad, para proteger a los usuarios y operadores. 26 5.4.1.2. La Protección Automática contra Cortocircuito Se trata de un dispositivo de acción instantánea (magnético o electrónico) capaz de detectar y cortar cualquier corriente superior a la corriente de arranque del motor, la cual puede ser varias veces la corriente nominal, dependiendo de la Letra de Código del motor. Esta puede ser una protección de fusible, bobina magnética o relé electrónico acoplado a un transformador de corriente. 5.4.1.3. El Dispositivo para Maniobras Habitualmente se utilizan contactores electromagnéticos o arrancadores de compuerta electrónica. Realmente no es una protección, aunque puede soportar las corrientes de arranque. Aunque es para controlar el arranque y parada del motor, de hecho es el dispositivo que abre y cierra el circuito ramal del motor tanto en operación normal como en sobrecarga. 5.4.1.4. La Protección contra Sobrecarga Este dispositivo está llamado a detectar las corrientes de sobrecarga comprendidas por encima de la corriente nominal; pero inferiores a las corrientes de cortocircuito. Aunque sensa también a estas últimas, su accionamiento es retardado y no actúa suficientemente rápido para despejarlas. Esto lo debe hacer la protección de cortocircuito. En este caso suelen utilizarse relés bimetálicos, fusibles de acción retardada y relés electrónicos. Algunos ejemplos de protecciones comunes se dan en las siguientes imágenes: Figura 5.12. 27 Figura 5.13. Figura 5.14. Inclusive se han desarrollado dispositivos que son capaces de cubrir todas juntas las exigencias de la norma. Son los llamados protectores integrales o “salva motores”. Figura 5.15. 28 5.4.2 Generalidades de los controladores lógicos programables en sistemas de protecciones de motores Modernamente, se fabrican relés o dispositivos electrónicos multifunción para la protección de motores. Los más modernos incorporan puertos de comunicación serial para transmitir en forma digital todos los datos del circuito motor donde están instalados. Los datos se envían a un microprocesador o computador para producir las señales de alarma y acciones correctivas necesarias (PLC´s o controladores lógicos programables). Con este tipo de relés pueden detectarse las siguientes condiciones de falla: 5.4.2.1. Temperatura Máxima El aislamiento es la parte más vulnerable de los motores. Se afirma que la vida de un motor está en relación directa con la vida de su sistema aislante. Si no se sobrepasa la máxima temperatura que éste puede soportar, el motor podría prestar servicio durante muchos años. 5.4.2.2. Clase de Aislamiento Figura 5.16. 29 Siendo el calor la principal causa para que un motor se queme, parece lógico que la protección más eficaz, sea precisamente algún dispositivo que permita detectar un incremento de la temperatura en el entorno del arrollado. Los recalentamientos eventuales y más aún los permanentes, disminuyen la vida de un motor. Definitivamente, el relé térmico (bimetálico) no es una protección para la temperatura del motor, ya que se basa en la temperatura del relé y no la del motor, la cual puede estar influenciada por otros factores como la temperatura ambiente, obstrucción de la ventilación, altura sobre el nivel del mar, arranques muy seguidos, baja velocidad, etc. Para ello podrían utilizarse relés conectados a sondas de temperatura instaladas dentro del motor. 5.4.2.3. Balance de Fases. Cuando los sistemas de tensión que alimentan un motor están en desequilibrio, entonces se forman campos magnéticos de secuencia positiva y de secuencia negativa en el estator que determinan torques opuestos sobre el rotor. En esta condición la máquina pierde eficiencia y la energía de pérdida se transforma en mayor cantidad de calor. Esta eventualidad podría preverse mediante dispositivos que impidan el trabajo del motor cuando las tensiones de fase estén fuera del rango prefijado. 5.4.2.4. “Single-Phasing” Una condición extrema del desbalance de fases ocurre cuando falta alguna de las fases del sistema trifásico. Entonces el motor queda conectado monofásicamente pero es incapaz de generar el torque necesario para vencer la carga mecánica o para arrancar. Entonces, en la máquina de inducción se desplaza el punto de operación hacia la zona de sobrecarga y hasta el mismo punto de quiebre, deteniéndose el rotor y quedando en operación bajo la condición de rotor bloqueado; que como sabemos, de permanecer allí es la condición más próxima al cortocircuito. Para esta condición bien podría emplearse un dispositivo que permita sensar la presencia de las tres fases e interrumpir la operación cuando falte alguna de ellas. 30 5.4.2.5. Rotación del eje Si el motor está energizado pero el eje no gira, obviamente estará tomando de la red la corriente de arranque (LRA) que como sabemos puede ser varias veces la corriente nominal. La instalación de un dispositivo que pueda detectar el movimiento del eje, será una protección conveniente. 5.4.2.6. Velocidad de rotación Un caso complementario de la protección anterior, es la condición de velocidad de rotación. Tanto si el eje no gira como si lo hace a velocidad inferior a la velocidad nominal de plena carga, el punto de operación se desplaza hacia la zona de sobrecarga y puede hacerlo peligrosamente hacia la zona de quiebre quedando bloqueado repentinamente. Aún girando a baja velocidad, el enfriamiento por ventilación se hace ineficaz y la temperatura del arrollado aumentará drásticamente. 5.4.2.7. Vibraciones Las vibraciones mecánicas se traducen en cargas sobre el eje que desplazan el punto de operación nominal del motor, con el consecuente incremento de temperatura. Un sistema que permita sensar las vibraciones y que inhiba la operación del motor bajo estas condiciones, sería la protección más recomendable. 5.4.2.8. Nº de arranques y paradas Los arranques y paradas continuas incrementan el calor acumulado en el arrollado. Los motores europeos se especifican para esta condición; no así los americanos; sin embargo, unos y otros son afectados por el calentamiento acumulado que se produce por esta condición. Existen dispositivos contadores que pueden impedir el arranque del motor cuando se haya igualado un número prefijado de arranques en un lapso temporal determinado. 5.4.2.9. Humedad en el aislamiento Uno de los factores contaminantes del aislamiento es la humedad. En efecto, la acumulación de humedad facilita las corrientes de fuga a través del material aislante, 31 exponiendo al motor a una condición de falla a tierra, entre fases o al cortocircuito según sea el caso. Cuando un motor permanece en reposo, su sistema aislante acumula humedad; por lo que la resistencia del aislamiento podría obtener valores muy bajos. En algunos casos bastaría con mantener una leve corriente DC que alimente el arrollado durante los períodos de no operación; así se mantendría el arrollado ligeramente caliente impidiendo la acumulación de humedad. Existen relés que permiten incorporar un sistema de vigilancia continua de la resistencia de aislamiento del motor cuando éste se encuentra desenergizado. Caso concreto es el Relé electrónico VIGILOHM de MERLIN GERIN el cual aplica un voltaje de 24 voltios DC entre una fase y la tierra del motor mientras éste se encuentra desenergizado. Al mismo tiempo el equipo se encarga de monitorear la corriente de fuga determinando la resistencia del aislamiento. El dispositivo genera una alarma en el caso de que la resistencia de aislamiento esté por debajo de 1 megaohmio y bloquea el arranque del motor en caso de que esté por debajo del valor crítico de 500 Kilo-ohmios. 5.4.2.10. Falla a Tierra. La falla a tierra es la más frecuente condición que se presenta por pérdida del aislamiento en motores. La vibración, el efecto joule, el rozamiento, la contaminación y el calor son la causa próxima en casi todos los casos de falla a tierra del arrollado. Un relé de falla a tierra puede ser la solución más adecuada. 5.4.2.11. Fallas de aislamiento. Las fallas de aislamiento degeneran en cortocircuitos entre espiras de una misma fase, a tierra, entre fases y trifásicos. Este último es el más cruento y destructivo de todos. 5.4.2.12. Tiempo máximo de rotor bloqueado. Cuando el motor es energizado el rotor parte desde la condición de parado a la condición de giro. Este proceso debe durar un tiempo relativamente breve hasta que el rotor alcance la velocidad nominal, alrededor del 90% al 95% de la velocidad sincrónica. Se 32 puede utilizar un dispositivo que mida el tiempo de arranque y que desconecte el sistema en caso de que se exceda el tiempo prefijado para el arranque. Esta condición también debería ser despejada por la protección de cortocircuito; sólo que ella se ajusta por encima del valor de la RLA quedando el motor desprotegido en cierto rango. 5.4.2.13. Bloqueo de rotor durante la marcha Esta es una condición especial: el rotor estaba girando normalmente y se detiene rápidamente. Podría ser a causa de una brusca sobrecarga mecánica un problema similar. En este caso habría que detectar el giro del rotor y desconectar el suministro en caso de una parada intempestiva. 5.4.2.14. Marcha en vacío La marcha en vacío se manifiesta por una sobre-velocidad. Esto ocurre por una pérdida repentina o brusca de la carga mecánica. Esta condición es crítica en motores DC del tipo serie, ya que sin carga, el motor se embala y puede destruirse. Por otra parte, un motor de inducción que gire a velocidad muy próxima a la de sincronismo, queda fuera del punto de operación nominal siendo menos eficiente y por lo tanto, libera energía en forma de calor. Para ambos casos, sería conveniente detectar la velocidad de rotación e indicar la condición de sobre-velocidad o la pérdida de carga. 5.4.2.15. Inversión del sentido de giro El sentido de giro en los motores trifásicos está determinado por la secuencia de las fases y en los motores monofásicos por el sentido de la corriente en el arrollado de arranque en contraposición con el de marcha. Algunos motores y sus cargas, pueden estar diseñados para esta condición de inversión del sentido de giro; otros no. El sentido de giro también se invierte cuando la carga ejerce un torque arrastrante mucho mayor que el torque reactivo del motor. En este caso el rotor es arrastrado hasta hacerlo girar al revés, lo cual sería una condición extrema respecto a la corriente que el motor toma de la red. 33 5.4.3. Selección y ajuste de los dispositivos de protección Las recomendaciones que siguen a continuación, tienen por objeto orientar a los usuarios en la selección a priori de los dispositivos de protección más adecuados para cada caso. Los ajustes, son los ajustes máximos que permiten las normas (C.E.N). Queda claro, que cada caso es un problema particular que debe resolverse con un estudio más minucioso que debe realizarlo el profesional del ramo. 5.4.3.1. Fusibles Aplicación: Protección contra Cortocircuito. Muy recomendables en la protección de transformadores y también como protecciones de respaldo de otros dispositivos de protección. En motores, puede utilizarse un fusible de doble elemento para ofrecer una gama de protección que incluya el rango de sobrecarga. Selección: En base a la corriente nominal y atendiendo también a la Capacidad de Interrupción. Ajuste: No tienen ajuste. El valor máximo permitido por las normas es el 300% de la corriente nominal. 5.4.3.2. Relés Bimetálicos Aplicación: Ampliamente utilizados en la protección de sobrecarga en motores de baja tensión. Selección: Se seleccionan en atención a la corriente nominal del motor a la tensión de trabajo. 34 Ajuste: Se pueden ajustar entre el 80% y el 125 % de la corriente nominal del motor. El valor máximo de ajuste es el 125% de la corriente nominal del motor. La recomendación es ajustarlo a un valor menor, permitiendo el arranque normal del mismo. Capacidad de Interrupción: Es la máxima corriente de Cortocircuito que el dispositivo puede interrumpir en forma segura, sin explotar. 5.4.3.3. Interruptores Magnéticos Aplicación: Recomendables en la protección contra cortocircuitos, especialmente en motores. Selección: En atención al valor de la corriente de cortocircuito y la curva de daños del aislamiento. Normalmente se selecciona en atención al valor máximo esperado de la corriente de arranque Ajuste: No todos tienen ajuste. En caso de tenerlo, la recomendación es ajustarlo al mínimo posible, siempre y cuando se permita el arranque del motor. El ajuste máximo permitido por las normas es el 700% de la corriente nominal, dependiendo de la Letra de Código (*) y el Factor de Servicio (**) del motor. 5.4.3.4 Interruptores Termo-magnéticos Aplicación: Ampliamente utilizados en las protecciones de baja tensión. Son útiles en la protección de cargas generales de iluminación, hornos, tomacorrientes, etc. No resultan tan eficientes en la protección de motores a causa del rango de las corrientes de sobrecarga y arranque. 35 Selección: En atención a la corriente nominal de la carga y a la Capacidad de Interrupción de cortocircuito. Ajuste: No todos tienen ajuste. Algunos de mayor precio, permiten ajustes del disparo instantáneo para la protección en el rango de las corrientes de cortocircuito; más propiamente, en el rango de las corrientes de arranque. Versiones más modernas y sofisticadas, permiten ajustes de ambos rangos. El valor máximo del ajuste del disparo por cortocircuito permitido por las normas es el 700% de la corriente nominal y el de sobrecarga, el 250% de la corriente nominal. 5.5 PROTECCIÓN DE ALIMENTADORES PRIMARIOS. SELECCIÓN DE FUSIBLES Y RELEVADORES. Pueden distinguirse tres tipos básicos de alimentadores primarios: Tipo rural. Con dos tipos de carga, la que alimenta pequeños poblados cuya carga se caracteriza por pequeños motores (bombas, molinos, pequeñas industrias) y alumbrado y la que alimenta grandes sistemas de bombeo. Tipo urbano. Aquel que tiene carga de alumbrado, pequeños y grandes comercios y pequeñas industrias. Tipo industrial. Urbano o rural que se caracteriza por grandes consumos de energía y por ende grandes motores. Los alimentadores primarios son los encargados de llevar la energía eléctrica desde las subestaciones de potencia hasta los transformadores de distribución. Los alimentadores primarios normalmente son de estructura radial. 36 La forma más usual de protección para las fallas que se presentan en el alimentador primario es la de sobre-corriente, a través de: a) Restauradores hidráulicos, electrónicos o micro-procesados en subestaciones rurales pequeñas con niveles de falla menores. b) Interruptores de potencia asociados a esquemas conformados por tres relevadores de fase alimentados a través de igual número de TC’s cuyos secundarios se conectan en estrella y un relevador residual que como su nombre lo indica se conecta al neutro común de la estrella formada (o relevadores trifásicos con unidades de neutro integradas), en subestaciones urbanas o con circuitos del tipo industrial y niveles de falla considerables. Para el caso de restauradores, debe disponerse además de los dispositivos detectores de fase, de accesorios que permitan la operación en fallas a tierra. El esquema a base de relevadores, cuenta siempre con unidades de sobre-corriente de disparo instantáneo. También debe disponer para líneas aéreas, de un relevador o función de recierre automático que permita re-cerrar el interruptor cuando este abre por la acción de los relevadores de sobre-corriente para liberar fallas transitorias, que son las que se presentan en un gran porcentaje en los sistemas de distribución aéreos. Si una falla es permanente, el relevador de re-cierre tiene la habilidad para dejar al interruptor boqueado y abierto, si después de un número predeterminado de operaciones para las que se programó no ha despejado la falla (generalmente se programan tiempos en un rango de 2.5 a 45 segundos). Existen diversas curvas características de operación para relevadores de sobre-corriente como ya se mostró anteriormente, por lo que se puede considerar: Para una curva extremadamente inversa es la más adecuada para una buena coordinación con fusibles 37 Para una curva muy inversa es la más adecuada para la coordinación con restauradores Para las curvas inversa y de tiempo definido lo son para coordinar con varios de los dispositivos de disparo a tierra de restauradores. La operación de la unidad de sobre-corriente de disparo instantáneo, dependerá de que el siguiente dispositivo de protección sobre el alimentador sea un fusible o un restaurador. Si el siguiente dispositivo es un fusible se puede optar entre: a) Ajustar la unidad instantánea para detectar fallas en la zona de protección de los fusibles, para la primera operación de la protección; y después bloquear su operación por medio de contactos auxiliares del relevador de re-cierre con el fin de que si la falla no es librada durante esta primera ocasión, opere la unidad temporizada dando tiempo a que el fusible se queme. b) Ajustar la unidad instantánea de manera que no detecte fallas en la localización del fusible y ajustar la unidad temporizada de forma tal que permita que se funda el fusible. 5.6 COORDINACIÓN SECUNDARIOS. ENTRE SELECCIÓN DISPOSITIVOS Y AJUSTE. PRIMARIOS Y NOMENCLATURA Y NORMALIZACIÓN DE RELEVADORES DE PROTECCIÓN. La coordinación de los relevadores se obtiene definiendo previamente, el conjunto de relevadores primarios que debe respaldar cada relevador El criterio empleado en la definición de la impedancia de ajuste se basa en evitar que la protección de respaldo se traslape con la protección primaria. La protección del sistema de transmisión tiene como función básica detectar las fallas que se presentan en las líneas o en las subestaciones y aislarlas rápidamente, abriendo todos los caminos de la corriente de cortocircuito La liberación de la falla se debe hacer lo más 38 rápido posible para minimizar los daños al sistema y a los usuarios Sin embargo la protección debe de ser selectiva, esto es tratar de aislar solo el elemento fallado. La protección de los sistemas de transmisión está formada por una protección primaria y una protección de respaldo En la protección primaria la operación es de alta velocidad (instantánea) y es la que trata de aislar la mínima sección de la red ante la falla la protección de respaldo es de acción retardada (con un tiempo suficiente para permitir que opere primero la primaria) es decir, opera solo si falla la protección primaria. La coordinación de los relevadores de distancia se lleva a cabo mediante la definición de conjunto de relevadores primarios que debe respaldar cada relevador y definiendo además el ajuste de todos los relevadores, de tal manera que, ante una falla, los relevadores que actúan sobre los interruptores que conectan o desconectan el elemento fallado sean los que deben liberarla y solo en el caso de que falle la protección primaria deberá operar la protección de respaldo. CONCLUSION La energía eléctrica por hoy es vital para las actividades básicas del ser humano, por lo que es importante el establecimiento de estrategias operativas para hacer uso eficiente de la energía y obtener ahorros económicos y generar más ventas, así como las condiciones requeridas necesarias bajo norma, estas condiciones son frecuencia y tensión al mismo tiempo que la energía se encuentre disponible en el instante que lo requiera nuestro cliente. La energía es vital para mantener el estado de bienestar que tenemos actualmente. Sin ella sería imposible el abastecimiento de los recursos esenciales, alimenticios y el transporte entre otros. Los sistemas de distribución han sido siempre parte esencial de un sistema eléctrico de potencia para la venta de la energía por lo que se tiene la convicción de que es necesario la aplicación de una correcta planeación y diseño para alguna perturbación creadas por los 39 cambios aleatorios de cargas, fallas causadas por la naturaleza y algunas veces falla por el equipo o del personal se encuentra operando. Por lo tanto los dispositivos de protección juegan un papel muy importante para la parte de distribución, ya que estas deberán detectar condiciones anormales del sistema de potencia e iniciar su pronta respuesta para la acción correctiva y devolver al sistema en su estado casi estable. Los dispositivos deberán de ser capaces de dar una respuesta rápida y una perturbación mínima al sistema. Para ello se estudiaron los diferentes tipos de protección sus características, tiempo de respuestas, al mismo tiempo los criterios de coordinación para cada uno de los eventos y definir el equipo de protección que proporcionara tal respuesta. La buena aplicación de un sistema de protecciones divide al sistema eléctrico en varias zonas y a cada una de estas tendrá su particularidad para una buena respuesta, desde luego se deberá tener un criterio óptimo para el diseño y lograr un eficiente sistema de protección. Es importante saber que es impráctico el satisfacer completamente la totalidad de estos criterios de manera simultánea; dichos criterios serán la confiabilidad, la seguridad, el tiempo de respuesta, la economía, la simplicidad y la selectividad siendo necesario un compromiso el evaluar cada una de las características con base a una comparación de riesgos. 40 REFERENCIAS [1] Enriquez Harper, Gilberto, (2005) Protección de Instalaciones Eléctricas Industriales y Comerciales, LIMUSA. [2] IEEE 100 The Authoritative Dictionary of IEEE Standards Terms, Seventh Edition (2000). [3] IEEE Std. 551-2006 Recommended Practice for Calculating Short-circuit Current in Industrial and Commercial Power Systems. [4] Enriquez Harper, Gilberto, (2002) Fundamentos de Protección de Sistemas Eléctricos por Relevadores, LIMUSA [5] Procedimiento para Coordinación de Protecciones de Sobrecorriente en Sistemas de Distribución. Subdirección de Operación, Gerencia de Distribución, CFE (1983). [6] Mendoza Romero Agapito. Protección por Relevadores a Sistemas de Potencia, IPN. 41