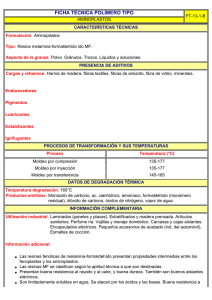
CONTROL BASADO EN PASIVIDAD DE UN CONVERTIDOR DC-DC TIPO REDUCTOR BUCK Ing. Raúl Roque Yujra Santa Cruz Bolivia Resumen La pasividad es una propiedad fundamental de muchos sistemas físicos, los cuales pueden ser definidos rigurosamente en términos de disipación y transformación de energía. Esta es una propiedad de entrada-salida inherente, en este sentido se cuantifica y califica el balance de energía de un sistema, el cual al ser estimulado por una entrada externa genera una salida. La pasividad por consiguiente relaciona la propiedad de estabilidad en el sentido entrada-salida. Esto contrasta con la Estabilidad de Lyapunov, que trata sobre la estabilidad interna de un sistema. El control basado en pasividad (Passivity Based Control) tiene bastante aceptación y una dirección activa de investigación y por esa razón en este reporte se da a conocer el diseño de un sistema de control utilizando este enfoque. Por otro lado, en los últimos años se ha utilizado el concepto de moldeo de energía para extenderse al moldeo de potencia, cuya aplicación ya tiene desarrollos en el campo del control de procesos químicos, termodinámicos, hidraulicos [Favache, Dochain, 2009], [Dirksz, Scherpen, 2010] [Garcia–Canseco, Jeltsema, 2010] y redes RLC no lineales [Jelsema D. 2005] 1 Introducción El termino de control basado en pasividad (PBC) fue insertado en 1989, en el contexto del control adaptivo de robots manipuladores [Ortega, Spong, 1989], para definir una metodología de diseño de controladores, que pueda hacer que el sistema de lazo cerrado sea pasivo, observándolo como un mapeo de una nueva entrada externa. Este objetivo al parecer es muy natural con el contexto, dado que la dinámica del robot se define como un mapeo pasivo de las entradas de torques a velocidades de salida. Este enfoque, puede ser visto como una extensión de la técnica de moldeo de energía (energy shapping) más la inyección de amortiguamiento, que fue introducida para resolver el problema de regulación de posición realimentando el estado completo en sistemas robóticos actuados [Ortega, Spong, 1989]. Primeramente la etapa de dar forma a la energía, la cual consiste en modificar la energía potencial del sistema, de tal manera que la nueva función de energía tenga un mínimo global único en el equilibrio deseado. Esto tiene su motivo y parte del hecho conocido, que el equilibrio estable de un sistema mecánico corresponde a la función de energía potencial mínima. En segundo lugar, la etapa de inyección de amortiguamiento que consiste en la modificación de las propiedades de disipación del sistema, de tal manera de obtener un sistema estrictamente pasivo [Ortega, et al, 1998]. La generalidad del control basado en pasividad, permite el tratamiento de diferentes problemas, tales como: realimentación de salida (esto cuando no todos los estados están disponibles para la medición), control de seguimiento a referencia (para seguir una trayectoria de referencia). El lector debe tener en mente que como la pasividad tiene sus orígenes en la teoría de circuitos eléctricos, el control basado en pasividad es más apropiado para sistemas eléctricos y electromecánicos, tal el caso de convertidores de potencia, máquinas eléctricas, etc. Sin embargo su aplicación no esta restringida a otro tipo de sistemas que no sean loas anteriores ya que en la actualidad se han reportado trabajos relacionados a sistemas químicos, termodinámicos, etc.. 3.3.3 Modelado de un convertidor CC-CC Reductor (Buck) y Control Basado en Pasividad Modelo del convertidor reductor Buck El modelado del sistema de estudio Convertidor reductor Buck, puede ser obtenido utilizando la metodología de Euler-Lagrange (desde el punto de vista energetico) o mediante las leyes de los circuitos eléctricos. Debemos también recordar que el modelo a estudiar se basa en modo de operación en conmutación continua. Modelo basado en Euler-Lagrange Se define el modelo de un sistema mediante: d L(q, q) L(q, q) Q q ,Q R n ; (1) dt q q donde q es el vector de coordenadas generalizadas y q es el vector de velocidades generalizadas, y se define la función de Lagrange como: L(q, q) T (q, q) V (q ) ; (2) Donde T (q, q) es una función de energía cinética, V (q ) es una función de energía potencial del sistema en estudio y Q son las fuerzas externas al sistema que pueden ser en general de tres tipos, entrada de fuerzas para control, fuerzas disipativas y fuerzas perturbadoras . Para el caso de sistemas eléctricos en particular se define Q D(q) Fq ; q (3) Donde D (q) es la función de disipación de Rayleigh del sistema y Fq es un vector de funciones forzantes generalizadas o fuentes de voltaje. Para nuestro caso, el convertidor reductor Buck, vamos a establecer como ley de control la denominada Modulación de ancho de pulso PWM de manera que la misma conmutara de u 1 a u 0 periódicamente. Establecemos como coordenadas generalizadas a la carga en el inductor qL y capacitor qC q respectivamente, por lo tanto tendremos que: qL es la corriente en el inductor z 1 y C es el C voltaje en el capacitor z 2 Cuando el switch es u 1 tenemos que las funciones de energía están dadas por: 1 1 2 T1(qL ) LqL2 ;V1(qc ) qC 2 2C 1 D1(qC ) R(qL qC )2 ; FqL1 E ; FqC1 0 2 cuando el switch es u 0 tenemos : 1 1 2 T0 (qL ) LqL2 ;V0 (qc ) qC 2 2C 1 D0 (qC ) R(qL qC )2 ; FqL0 0 ; FqC0 0 2 Entonces combinando ambas posiciones según el modo de operación continua del convertidor: 1 T (qL ) LqL2 ; (4.a) 2 1 2 V (qc ) qC ; (4.b) 2C 1 D (qC ) R(qL qC )2 ; (4.c) 2 FqL E ; (4.d) FqC 0 ; L T (qL ) V (qC ) (4.e) 1 2 1 2 LqL qC ; 2 2C (4.f) de donde obtenemos el modelo : 1 E qc ; L L 1 1 qC qL qC ; C RC T escrito en variables de estado z z 1 z 2 1 E z1 z 2 ; L L qL (5.a) (5.b) (6.a) z2 1 1 z1 z2 ; C RC (6.b) Control Basado en Pasividad Para diseñar el controlador basado en la técnica de pasividad se requiere que el modelo dado por (6.a) y (6.b) del convertidor sea escrito de la forma matricial [Ortega et al] [García E]: Db z (J b Rb )z b ; (7) entonces tenemos 0 0 L 0 0 1 E Db ; b ; Rb ; Jb 1 0 0 0 0 0 1/ R este diseño se desarrolla en dos partes; la primera parte se denomina moldeo de la función de energía y el segundo es la inyección de amortiguación. Con el moldeo de la energía la función de energía potencial es modificada hacia un nuevo punto de equilibrio llevándolo hacia una localización deseada. Con la inyección de amortiguación se modifica la función disipativa de Rayleigh hacia un nuevo punto de equilibrio el cual será global asintóticamente estable [Ortega et al]. Iniciamos el diseño del controlador considerando la regulación hacia un voltaje en el capacitor y corriente del inductor deseados respectivamente, es decir zd z 1d relaciones descritas por (6). T z 2d y que satisfacen las Sea el vector de error promedio definido como: z 1 z 1d e z zd z z ; (7) 2d 2 Luego la dinámica del error promedio para el convertidor reductor Buck se obtiene como sigue: Db z (J b Rb )z Dbzd (Jb Rb )zd b Dbzd (J b Rb )zd ; Db (z zd ) (J b Rb )(z zd ) b Db zd (J b Rb )zd ; Dbe (Jb Rb )e b Db zd (Jb Rb )zd ; (8) Esta expresión denota el proceso de moldeo de energía para el vector de error. Para la etapa de inyección de amortiguamiento, tal como se muestra en [11] y [12] se agrega a cada uno de los miembros la relación Re i (t ) , donde Ri es una matriz que asegura la disipación deseada, entonces tenemos: Dbe (Jb Rb )e Re i b Db zd (J b Rb )zd Re i ; Ri 0 Ri ; Ri 0 ; 0 0 Entonces hemos obtenido un sistema basado en el error promedio, si este es no forzado, podemos definir una función de almacenamiento H d que puede ser definido en coordenadas de e(t ) para el sistema obtenido, de tal manera de asegurar la estabilización del comportamiento del error hacia la estabilidad asintótica de cero del error independiente del valor de (t ) , por lo que se demanda que: b Db zd (Jb Rb )zd Re i ; (9) y en particular para nuestro caso; E Lz1d z 2d Ri (z1 Vd ); R z 2d ; R Tomando en cuenta que se desea estabilizar el voltaje en el capacitor a un valor constante 0 Cz2d z 1d z 2d Vd , entones queda la ley de control estática [García E, 2000] es definida por: V R V d i (z1 d ) ; E E R (10) 4. Resultados de Simulación En este parte del reporte vamos a mostrar los resultados de simulación para las leyes de control obtenidas mediante el método de Control Basado en Pasividad. El software de simulación es Simulink de MatLab. La figura 1, se muestra la respuesta para el convertidor de potencia Buck, en este caso se utilizaron los siguientes parámetros: E 12[V ] , L 10[mH ] , C 47[ F ] , R 15[] y Vd 9[V ] , para el controlador se eligió el valor Ri 20 . Se ve muy buena respuesta dinámica cumpliéndose el objetivo de regulación a voltaje deseado que inicialmente es de Vd 9[V ] y posteriormente cambia a Vd 7[V ] . Corriente en Capacitor z1 1 0.5 0 0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 0.02 Voltaje en inductor z2 10 5 0 0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 0.02 Controlador basado en Pasividad 1 0.5 0 0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 0.02 Fig. 1 Respuesta de Simulación para convertidor Buck 5. Conclusiones Se ha presentado el desarrollo de una ley de control basada en Pasividad, la cual es un enfoque sistemático sobre el diseño de sistemas de control que poseen la propiedad de disipación de energía. Un objetivo primordial del presente, es el de hacer conocer estas técnicas para el diseño de sistemas pasivos en base a la técnica de moldeo de energía (energy shaping), su aplicación al control de robots es abordada en el trabajo de Kelly y Santibañez. Por otro lado, ya desde 2003 en el trabajo de Ortega y Canseco se hace uso de estrategias más generales para el control de sistemas pasivos utilizando la técnica de moldeo de potencia (power shaping) y su uso no solo en sistemas eléctricos del tipo lineal y no lineal sino se extiende a procesos químicos y termodinámicos [Favache, Dochain].. 6. Bibliografia Desoer, C.A. Vidyasagar. Feedback Systems: Input-Output properties. Academic Press. New York. 1975. Loria A. Passivity in control systems. CNRS UMR 5228 Laboratoire d’Automatique de Grenoble ENSIEG. 1998. Lozano R., Brogliato O., Egeland and Mashke. Dissipative systems analysis and control. Comunications and Control Engieneering Springer Verlag . London.. 2000. Roque R.. Control Adaptivo de seguimiento de trayectoria de robots manipuladores. Tesis de grado para optar al titulo de Licenciado en Ingeniería Electrónica. Facultad de Ingeniería. Universidad Mayor de San Andres. La Paz – Bolivia. 2002. Roque R.. Pasividad en Sistemas de Control. Reporte traducido al castellano autorizado por Antonoi Loria. 2013. Roque R.. Modelado y Control de sistemas Continuos. Universidad Mayor de San Andres. La Paz – Bolivia. 2013. Ortega R., Loria A., Nicklasson J., Sira-Ramirez H. Passivity based control of Euler-Lagrange Systems: Mechanical, Electrical and Electromechanical Applications. Comunications and Control Engineering. Springer Verlag. London. 1998. Kelly R., Santibañez V.. Control de Movimiento de Robots Manipuladores. Ed Pearson. Prentice Hall . 2003. Khalil H. Nonlinear Systems. Second Editon Prentice Hall. 1996. Garcia-Canseco E., Jeltsema D., Scherpen J. y Ortega R. Power-based control of physical systems two case studies. Proceeding of the 17th World Congress The international Federation of Automatic control., July 6-11, 2008. Dirksz D., Scherpen J.. Power-based adaptive and integral control of estándar mechanical systems. 49th IEEE Conference on Decision ans Control, December 15-17, 2010. Favache A., Dochain D.. Power-Shaping control of an Exothermic continnuos stireed tank Reactor. University Catholique de Louvain, Belgium. 2009. Jeltsema D.. Modeling and Control of Nonlinear Networks: A Power-based Perspective. PhD Dissertation Thesis. Technische Universiteit Delft. May 2005. Ortega R., Spong M..Adaptive motion control of rigid robots: A Tutorial. Automatica. 1989. Vidyasagar M.. Nonlinear systems analysis. Prentice Hall. New Jersey. 1993. Nilsson T., Perez M.. Introduction to Passivity based control of Euler-Lagrange Systems. Vaxjo University. Nov 2003 Van der Shaft A.. L2-Gain and passivity techniques in Nonlinear control. Comunication and Control Engineering. 2nd Ed. Springer Verlag. 1999. García E. M.. Tesis Doctoral: Estrategias de Control para sistemas bilineales aplicadas a los convertidores de potencia DC-Dc. Universidad Politecnica de Cataluña. Marzo 2000 Sobre el Autor Raúl Roque nació en La Paz Bolivia, concluyó la Carrera de Ingeniería Electrónica en la Facultad de Ingeniería de la Universidad Mayor de San Andrés el año 2002. Desde 2003 desarrolla su trabajo en el área de Instrumentación, Sistemas de control y medición en el sector de hidrocarburos. En 2015 obtiene el certificado TUV SUD de Ingeniero en Seguridad Funcional FSE. Actualmente se desempeña laboralmente en YPFB Transporte S.A., docente invitado para el DICAPI de la Universidad Privada Boliviana, docente invitado de INEGAS. Su línea de investigación está centrada a Control No lineal, Control por Modos deslizantes, Electrónica de Potencia y Sistemas Instrumentados de Seguridad. [email protected].