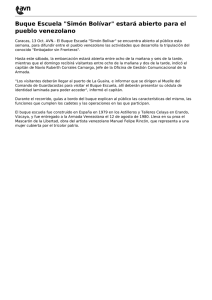
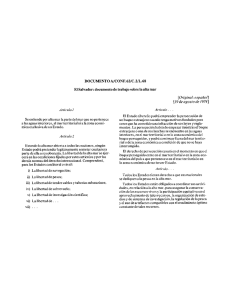
'^. ^., ESTIMACIÓN DE LA VELOCIDAD DEL BlJnUE EN AGUAS TRANQUILAS A PARTIR DE ENSAYOS CON MODELOS, Y ANÁLISIS DE PRUEBAS Tesis Doctoral por HONORIO SIERRA CANO Ingeniero Naval Director de la Tesis PROF, LUIS DE MAZARREDO Y BEUTEL Doctor Ingeniero Naval Madrid, Octubre de 1971 m'ér ESCUELA T^OKIQA SUPERIOR DE !NGb\ír:^e^' f'^AVALES i B i b 1 •) c •• Registro - •-•ÍNDICE 22-.S E^mplar __5^.0_4_._. IJpc.umenío Capítg^^^ i r - p C " o Objeto de este trabajo Capítulo 2 Resistencia al avance de una carena 2,1, Introducción 4 2,2. Métodos de correlación modelo-buque 5 2, 3, Ensayos para determinar las componentesdelaresistencia 9 2,4, Rugosidad 22 2,5. Interacción entre viscosidad y forma-ción de olas 27 Resistencia debida al viento sobre la obra muerta 30 2,6, Capítulo 3 Funcionamien-to de propulsores en flu_ jo uniforme 3.1, Introducción 35 3,2, Análisis de los resultados de ensayos con propulsor aislado 35 Extrapolación de resultados al propul_ sor real 35 Efecto de escala en C 39 3,3, 3.3.1, i-i 3,3,2, Capítulo 4 45 Interacción entre el casco y el propulsor 4.1. Coeficientes de propulsión 48 4.2, Efecto de escala en la estela 60 4, 3, Efecto de escala en el coeficiente de succión 72 Conclusiones de este capítulo 79 4.4. Capitulo 5 Obtención de resultados experimentales y extrapolación al buque. 5.1, Introducción 81 5.2. Ensayo de remolque 82 5,3, Ensayo de propulsor aislado 82 5,4, Ensayo de autopropulsion 82 5.5, Método de extrapolación 83 Capítulo 6 6,1, Análisis de pruebas Análisis con medidas del par y del empuje 87 6.2, Análisis sin medidas del empuje 95 6,3, Corrección de resultados por aguas poco profundas 98 6,4, Apéndice Efecto de escala en C . Rugosidad Estado de la mar, 107 Aplicación práctica 109 1. - ; OBJETO. DE. ESTE TRABAJO Se pretende estudiar los factores que, afectan a la previsión de velocidad del buque en aguas tranquilas mediante la realización de ensayos con iiKpdelos. Como consecuencia de este estudio se propondrá un sistema para obtener los datos experimentales adecuados y un método para extrapolar estos resultados al buque. El trabajo se C9mpleta con un procedimiento de análisis de pruebas consecuente con el método de extra_ polacion citado. Un mejor conocimiento de'este problema permitirá estimar con más aproximación la velocidad del buque en pruebas y el punto de funcionamiento del propulsor. E inversamente, para una velocidad deseada será posible calcular con mayor precisión la potencia a instalar en el buque y proyectar hélices de funcionamiento más ajustado. La mayoría de los canales de experimentación han venido estimando la potencia y las revoluciones del buque en pruebas por extrapolación directa de los resultados de autopropulsión con el modelo, teniendo en cuenta el efecto de escala en la resistencia de remolque. Este efecto se corrige remolcando parcialmente el modelo con la fuerza adecuada a cada velocidad (deducción de fricción) durante el ensayo da autopropul- sión. Pero como el efecto de escala existe no solo en la resistencia al avance de la carena, sino también en el funcionamiento del propulsor y en Iqs coeficientes de estela y succión, dificilmente coincidirán las curvas de potencia en el eje y revoluciones del modelo y del buque. En consecuencia, cada canal aplica un coefiente global de corrección a la potencia y otro a las revoluciones, según su propia experiencia. Estos coeficientes dependen de tantas variables que resulta imposible ancon^trar una ley aceptable para aplicar a un buque determinado a menos que se apliquen resultados de experiencias anteriores con otros buques similares en formas, proporciones, potencia, etc. Pero no es est.e el único inconveniente, como veremos. El proyec tp del propulsor o propulsores óptimos requiere conocer cada uno de los coeficientes de propulsión reales del buque, cuyos valores no se pueden llegar a deducir utilizando los citados coeficientes de corrección glo- bales. Por lo cual, es preciso echar mano de los coeficientes de propulsión deducidos experimentalmente con modelos, es decir, sin tener en cuenta el efecto de escala. Esto puede dar lugar a sensible,s errores, principalmente en buques de una hélice en donde el efecto de la viscosidad es muy importante. Con este trabajo nos proponemos analizar uno a uno los factores que intervienen en la propulsión del buque, estudiando el efecto de es- cala en cada uno ds ellos con el fin de aplicar estos resultados a las previsiones de pruebas, y al mismo tiempo analizar, adecuadame.nfé , los resultados.--.de .estas' prue.'b.^s para que puedan servir de. información en futuras previsiones. ... RESISTENCIA AL AVANCE DE UNA CARENA 2.. 1, Introducción En ].a actualidad, el proyecto de un sistema de propulsión requiere considerar separadamente la carena y la hélice, para estudiar después la acción mutua entre ambos sistemas. De aquí la necesidad de o realizar tres tipos de ensayos para llegar a determinar todos los factores, que intervienen en la propulsión: ensayo de remolque de la carena, ensayq del propulsor aislado (en flujo uniforme) y ensayo de . autopriopulsión . La resistencia al avance de un cuerpo sumergido se origina por la fricción del agua sobre la superficie del cuerpo debido a.la viscosidad. La resultante R^ de los esfuerzos tangenciales ejercidos sobre toda la superficie se denomina resistencia de fricción. En un fluíc^o perfecto la resultante de los esfuerzos normales sobí'e un cuerpo sumergido es nula debido a que la energía de presión que adquiere aquél en la zona de entrada se transforma parcialmente en energía cinética hacia el centro del cuerpo, y ésta se recupera de nuevo en s'i totalidad en forma de epergía de presión a la . salida. Ahpra bien,.en el caso del agua, fluido real, la viscosidad da origen a que una parte de la energía cinética de las partículas que corren junto al cuerpo ' (dentro de la capa límite) se transforme en calor, y en consecuencia, no se recupere totalmente a la salida la energía de presión que el fluido tenía a la entrada del cuerpo.'' En este caso, existe una resultante de las fuerzas normales sobre la superficie del cuerpo en' sentido contrario al avance q\¡e se de- nomina resistencia de presión de origen viscoso R .• La suma de R^^ '=' pv f y Rpv es la llamada resistencia viscosa RV . Cuando el cuerpo avanza flotando sobre la superficie libre del agua ,1a distribución de presiones alrededor de la carena se altera a causa del desequilibrio.originado en la superficie (formación de olas) y aparece una. resistencia al avance resultante de los esfu^r_ zos de presión sobre la carena R . Dicho de otro modo, parte de la energía que precisa el buque para avanzar se transforma en energía cinética de olas. En resumen, la resistencia ai avance de una embarcación de superficie puede considerarse" como [email protected] esfuerzos tangenciales y. esfuerzos normales a la superficie de la carena. Los prime_ - ros son de origen viscoso y los últimos son originados por la visco_ . sidad y por la formación" de.-olas; Esta descomp.bs icióñ cual.ltatdv¿ de la resistencia se resume con.mas claridad en el siguiente cuadro: 5 - pv _J L w L. R„ • - .'.' • V • ^-'Ut il'izando el análisis dimensional en él estudio de 'astaí' • cuestión se obtiene que el coeficiente de resistencia total défin'i'^' Re. do como C, 1 depende de la forma de la carena, del estado u2 2 P ^^ de su superficie, del- numero de Froude y del número de Reynolds.-' C„ = f (forma, rugosidad, F ,R ) Las formas son una característica comün al buque y a su mo^ • délo, por lo que .para el estudio del efecto de escala se puede, pres_ pindir d e e s t e parámetro. Lo mismo puede decirse de la rugosidad si, en principio, se supone hidrodinámicamente lisa la superficie da la carena. Por lo que, en este caso, p u e d e d e c i r s e q u e el.coeficiente de resistencia total depende solo del F y R . El número de Froude • .. . • . . n -^ n.. rige aquellos fenómenos en los. que intervienen las fuerzas de inercia .y el número de Reynolds, aquéllos donde interviene la viscosidad. No es correcto descomponer R_ como suma de R^, R , R y estu.i,. r • , pv. w diar estas componentes por separado, pues existe una interferencia entre las causas que dan origen a cada una de ellas. De modo que rigurosamente hablando las tres componentes anotadas depende da R y F . No obstante', se puede suponer con bastante aproximación: ^f = ^ '(P^n) ^Cp v =.• f„ (R n,) 2 C = f, (F ). w' - 3 . . n 2.2.- Métodos de correlación modelo-buque Desde que William Froude comenzó a realizar los primeros ensayos con modelos en el siglo pasado, han sido numerosos los métodos propuestos para extrapolar los resultados experimentales al buque real. En este trabajo se va a hacer referencia solamente a aquellos métodos que han llegado a ser adoptados,por mayor número de canales en sus trabajos rutinarios o de investigación: el método -de F r o u,d,e-. .ao n-, . t r e s -.^ y a r ¿¡an t e s ,(.<; o e f,ic-i,.e'n t e s '.d e^ .;-F,]?ou de; ,•• ,1 i n e a A T,T G - 4 7'. y l i n e a . J.T:TC,r-5 7 )• y e l^-má t o-d,o -de, .HughBS-.,..;-. ,:. x. . ^;,i .,', • .•• -V ' É l m é t o d o . i. ... , .., d e • Froti'de"'cori&í'de'rá' l á rési'st'enc i a t o t a l ; d e l mo_ d e l e , d i v i d í d a • en---dó-s • •comp'on'erites'r' la" V d'e fricción, qué se supone' igual "a l'a"- que' teñ.dría' una''placa plana de igual longitud, y ; superficie moj ada que l'a' carena, y" la resistencia residual , que no . t iene'-otra definición -que la" diferencia entre la'resistencia total y -la de f rlcci^on:. Froüde propuso'la hipótesis' 'd'e que la resistencia re_sidual así- definida es proporcional al cubo de la escala cuando'las velocidades respect.ivas del.buque, y su .modelo e.stán en razón de la v raiz cuadrada de la escala, Lo que equivale a decir que ensayando un modelo a igualdad de número.de. Froude e,l coeficiente- de resistencia residual es igual al del- buque, Las dos hipótesis en que se basa este método, incluyen inexactitudes de cierta consideración, En efecto, la resiste.n^cia de fricción de una carena es rnecesariame.nte ' mayor qué ' la de un.a. placa plana equivalente debido a que, para una misma velocidad de avance, la velocidad relativa media del. agua sobre la superficie de la carena es mayor que respecto de la placa plana (basta pensar que la carena hace el efecto de un venturi interior al fluido). Según esto no hay duda de que la resistencia residual incluye, además de la resisténcia'por formación de olas, la resistencia de presión de origen viscoso y la diferencia entre la resistencia de fricción y la de una placa plana equivalente, Ahora bien, admitir que la resistencia residual depende solo dei número"de Froude equivale a decir que la resistencia de presión dé o'ri'géh' viscoso y parte de la resistencia de fricción son independientes del número de Reynolds, Esta teoría entraña, por lo tan to, unos errores que han sido tanto más•sehsibles cuando se han apli cado a buques de formas cada vez más llenas, debido precisamente a que con estas formas son relati.vajnente mayores los valores de R • ••..•,:• de - . l.a d i f e r e n c i a •: ' • ' • ' • '••••:' ' • • • . •: • . .; del m é t o d o de Froude - (coeficientes' de ATT.C-47 e ITTC-57_) .se dif eren.c.ian . ex.clus i.vamente la linea les de fricción y de l a . p l a c a de correlación, más fué'.adoptada oficialmente de E x p e r i m e n t a c i ó n de la r e s i s t e n c i a v -^ Rj-(..c.ar.e.n.a ), - ...Rj-X-placa - p l a n a ),,.. . Las v a r i a n t e s resistencia v p plana equivalente. Entre a d e c u a d a .y m o d e r n a de la estas, es •, la .J.TTC-57 , , que por la .Conferencia .Int,.ern.a.cional de..Cana- celebrada en Madrid, .en 1-9 5.7 ,, para, el de f r i c c i ó n , y tiene por O, 0^-5. •^ • en el c á l c u l o Froude, (Ig R^-2)2 • cálculo expresión. (2,1) - 7 .'Sobre las demás-, ' tiene esta.linea, la ventaja de que no pretende definir la'-resistén'cia de' f'ri.cci6n;'de una p'laca. plana, sino lle_ gar a una previsión-•d'e la potencia' o • de la- velocidad del buqítfe';'-•mas acertada, de racuerdo con la experiencia acumulada por los canales. Es_ to S'ignific.a que, aún aplicando el método, de Froude.a la extrapolación de resul.tados .de ensayos, el valor de C^ obtenido de la.linea ITTC-57 incluye de algún, modo- el efecto, tridimensional sobre la r e s i ^ tencia de fricción de una placa plana. Por lo que 'se puede considerar que esta formula da un valor medio de la resistencia viscosa de. carenas de .dis.tintas formas en función del número de Reynolds,. El método de correlación propuesto por Hughes da un paso más en la resolución' del problema que. aquí se- está tratando., al considerar el -influjo -de las .formas, en la resistencia originadáppor la ^isco_ sidad. Tras' observar los resultados de numerosos ensayos con modelos a distintos números de Reynolds y escasa formación de olas propuso la hipótesis, de que. el cociente • entre . el coef icier^te . de resistencia viscosa de una carena.y. el de fricción de una placa plana equivalen- • te es independiente del número de Reynolds para unas formas dadas. A este cociente lo llamó factor de forma. Para determinar el factor de forma de una carena se debe en_ sayar el modelo a una velocidad suficientemente baja, de modo que la resistencia medida es solamente de origen viscoso, y el cociente entre este valor y el de la resistencia de una placa plana equivalente al mismo número de Reynolds es el factor de forma de la carena. Hughes obtuvo, asimismo, uñn expresión del coeficiente del fricción de. placas planas ,. basada en los resultados de' ensayos con placas y'pontonas: r } - 0-067 (Ig R^-2)^ La aplic'áción de' esta fórmu'ia supone que el coeficiente de resistencia definido por la linea "IT-TC-57 lleva' .implícito un factor de. forma cuyo valor es 1,12.. La mayor parte de los métodos d'e correlación propuestos . por distintos autores, no-difieren sustancialmente ' de los ya citados, por lo que no es necesario hacer aquí úná exposición' de los mismos. No obstante puede ' en.c'on't'ra'rsé inf ormac'ión . suf icie'rít'é en l'a's ref'é'reñc las bibliográficas de és'te trabajo. ' '• - -. • - .•-• .-.. En la figura.1 se representan las.lineas ATTC-47, ITTC-57 y la. curva de resistencia ,de fricción- de placas planas dada por Hughes LINEAS BÁSICAS DE FRICCIÓN NORMALMENTE UTILIZADAS HEUA DE LOS VAljDRES DE C, CORfiESPONOIENTES A LOS COEFtCtENIES DE FROUOE PARA OISTMTAS ESISRAS ATTC-Í7 ITTC-,57, HUGHES I: OD i 4.= V» &0 55 -r 7.0 T" 7.5 8JD 85 90 95 - 9 Como los ccefiaientes de Frouáe no son. función del número de Reynolds sino dé la eslora,.se han repi'resentado. en este gráfico p o r.^'tramos co.rrespondientes \a distintas esloras en un margen de veloci-^áfd normal pa^ra cada una de ellas .-, • i 2.3.- Ensayos -.para determinar las componentes de la res:igtencia ; Existen diversas..; técnicas para determinar experimentalmen- te-, las componentes de .la resistencia. Por ejemplo, si se mide. la. presión en puntos convenientemente distribuidos por la superficie.de la carena se puede obtener por. integración, la resistencia de -p'res ion , .. es:decir, l a s u m a R •• p v +R . La diferencia, entre la resistencia total w . ,í.,- medida en el ensayo de remolque a. la misma velocidad y el valor halla_ do ¡ianteriormente es la resistencia de fricción real de la :;C.ar,ena. La resistencia viscosa puede.obtenerse ensayando.dos carenas iguales unidas, por el. plano , de . flotación.-El.modelo.ha.de. ir suficientemente . sumergido para evitar o hacer despreciables los,-, efectos de¡superficie libre. Hay que tener en cuenta que la resistehcia media por este procedimiento es el valor de R . cuando el número de Frou_ de ¡tiende a cero. Es , . por tanto, equivalente a ensayar el modelo sen_ cilio (flotando) a baja velocidad,.pero tiene la ventaja de que permite correr a números de Reynolds.supercríticos. En cambio este procedimiento encarece los modelos y requiere un dispositivo especial de remolque. La resistencia por formación de olas se nviede medir directamente por medio de fotografías estereoscópicas de la superficie del: agua. Con ésto se puede obteneivla energía de las olas originadas por' el modelo y en consecuencia, la resistencia por formación de o 1 a:s . Obsérvese que todos estos procedimientos requieren.técnicas especializadas para su ejecución y, en.consecuencia, existen solo re_ suLtados de medidas aisladas con' determinados modelos,.que no permiten llegar a conclusiones inmediatas respecto al p.roblema que se abor_ dai'en el presente trabajo. M El ffiétodo más elemental para. determinar la resistencia vis- . I 1 ; cosa de una carena en un margen relativamente amplio del número de. Reynolds consiste en ensayar una serie.de m o d e l o s , d e ños j geométricamente semejantes distintos.tama- (geosim). Las lineas que,unen los pun_ to's • pertenecientes a números de.Froude iguales . deben ser, co,n cierta aproximación, paralelas,, y . el límite de estas lineas cuando F tien- de.' a cero es precisamente la lin.éa de resistencia viscosa de esa carena . - 10 - £1 autor de esta tesis ha realizado, ref ('9Ó)s un análisis de los resultados de los ensayos realizados por diversos centros con series "geosim"' de' buques con características sensiblemente diferentes entre sí: Un "buque de pasaje". El Pardo Buque "Victory". Wageningen, ref 6 Buque "Lucy Ashton". B.S.R.A., ref 7 Petrolero "Tina Onassis". El Pardo, ref 8 Este análisis consistió en realizar un "fairing" gráfico de los resultados numéricos de los ensayos con el fin de obtener los va_ lores del coeficiente de resistencia para determinados valores de F '^ n comunes a todos los modelos de cada serie. Los resultados se transcriben en las figuras 2,3,4 y 5 de este trabajo, donde en abscisas 2 se ha llevado la expresión 1/Xlog R -2) con el fin de que la linea ITTC-57, oficialmente en vigor en todos los canales del mundo, este representada por una linea recta. En estos gráficos se puede observar que los puntos correspondientes a iguales valores de F se dis- tribuyen, con bastante aproximación alrededor de lineas rectas paralelas. Estas lineas se aproximan entre sí al disminuir el número de Froude y en el límite definen la curva de resistencia viscosa ya que entonces la formación de olas es despreciable. Según ésto, las lineas iso-Froude se pueden definir por una expresión de la forma C^^ = A / U o g R ^ - 2 ) ^ + B^ (2.3) donde B. es sólo función del n° de Froude para unas formas dadas. La curva de resistencia viscosa puede venir definida por A/(log R -2) +B " en esta expresión A y B n V (2.4) dependen solo de las formas. En la figura 6 se han representado las curvas C^ obtenidas para cada "geosim" y en ella puede observarse que en todos los casos el valor de B es des- preciable dentro del margen' de.los errores experimentales. Lo cual indica que el coeficiente de resistencia viscosa de una carena puede representarse, por una expresión de la forma: C^= A/(log R^-2)' (2.5) o lo que es 1° mismo, C^ = 0. 067 r/(log R - 2 ) ' (2.6) BUQUE DE PASAJE RESULTADOS DE ENSAYOS CON GEOSIMS REALIZADOS EN EL CANAL DE EL PARDO k~ 0^x103. 3- 0.055 0.0^0 0.050 1 (lgRn-2) = IR 0.035: LUCY ASHTON RESULTADOS DE ENSAYOS CON CEOSMS REALIZADOS EN l A a & R - A . 7- 6- 4 - CjXiO' 3— 2 - 1 - d -I 0.055 (Ig Rn-2)2 Fig. 3 BUQUE VICTORY RESULTADOS DE ENSAYOS CON GEOSIMS REALIZADOS EN WAGENINGEN 6^0- 5,0I CTXIO' *,5- 4,0 — 3.5- 3,0 — a060 a055 0.050 oots 1 (lgRn-2)J Fig. 4 aiuo 0035 0030 TINA ONASSIS RESULTADOS DE ENSAYOS CON GEOSIMS REALIZADOS EN EL CANAL DE EL PARDO CyXlO^ I 0.055 0.040 (Ig Rn-2)2 Fig.5 0.035 i LÍNEAS Cy OBTENIDAS PARA CADA FAMILIA DE GEOSIMS SIN PREJUZGAR LA CONSTANCIA DEL FACTOR DE FORMA 3 v^ _ ^^^ 1 2 1 C^xIOS Zona de mod@[os -1-rn Zona d© b u q y o s ^ 1 • 0 I 0.05 1 O.Ó¿ 1 1 0.03 0.02 1 |lgRn-2)2 Fig, 6 1 0.01 16 donde r es el factor de forma definido por Hughes lo que constituye precisamente su hipótesis sobre correlación modelo-buque. Para dar un-"carácter oficial" a esta expresión, puede suS' tituírse por 'V 0.07 5 r'7(log R -2) n 2 (2.7) Si bien no debe resultar extraño que en buques de formas finas nos encontremos con valores del factor- de forma r', definido por la ec. (2.7), inferiores a la unidad, debido a que la linea ITTC-57 hó r^epresenta el coeficiente de resistencia de fricción de placas planas según se ha expuesto anteriormente. En el presente trabajo se añade material experimental reali_ zadó por el autor en el canal de la Escuela de Ingenieros Navales de Madrid, parte del cual ha sido ya publicado en ref (90). Se trata de la extrapolación de los resultados de ensayos de remolque conwa- rios modelos de unos 3 metros de eslora, para compararlos con los obtenidos por otros canales de..raayor capacidad con modelos semejantes a aquéllos, pero de doble tamaño. Esta extrapolación se ha efectuado aplicando los métodos de correlación de Froude, ATTC-47, ITTC-57 y Hughes, a' cada uno de los modelos ensayados, que son los correspondieni-es a los siguientes bu - • ques , Un buque de pasaje Fig. 7 El buque tipo "Victory" 0,58 •B Cg = 0,675 Un modelo semejante al 4268 de la serie 60 C3 = 0,75 Fig. 9 Un petrolero de 150.000 TPM Cg = 0,80 Fig. 10-a Un petrolero de 230..000 TPM Cg = 0,82 F|ig, 10-b Fig. 8 Puede observarse en estas figuras que la hipótesis de Hughes proporciona las previsiones más aproximadas de los coeficientes de resistencia, independientemente de las formas y proporciones del buque, al menos en la zona de números de Reynolds correspondientes a los modelos. El análisis de pruebas de mar realizado por diversos autores parece indicar que la extrapolación al buque por el método de Hughes proporciona igualmente las previsiones mas realistas. En efecto, al coeficiente de resistencia estimado para el buque de carena lisa es_preciso añadirle un incremento- C' por el aumento de resistencia debido a la rugosidad del casco y a otras causas, como veremos obtenidos de y en el apartado próximo. Pues bien, los valores de C 3. pruebas de mar resultan ser negativos cuando se utilizan los métodos ~ :; BUQUE DÉ PASAJE • . : ' .'• - • • • ' ' • . ' 4 '•• O W^-CANAL DE EL PARDO{7^:50) ^ O ^ ••'' ••• LA ESCUELA (^=100 A :. A . - 1 ^ • - _ + • •• ... . • :•• ;. •• .. .. •• •• •• . ( - . .. j .. .. ( •' '• •••-• ^=50 POR FROUDE) •• " ATTC-47) ••• " •• : ,,. " ITTC-57) ; " HUGHES ) " / / \ .' :••' •• T ' ' • ,• •--.'•. - • . '•':• . • 4 ;'• e^xío;^ ' .lo' '.] - • "• ' ^ . . . • - " ••, - /ó , o o V, y 3.5O .:• , , • , ;:' ^: - ; ü' i í ••:.",•" !• 0.10 : 1 0.15 • 1 0.20 Fn í ig 1 0.25 - 0.30 I BUQUE VICTORY -•4.5- CANAL " o A DE WAGENINGEN ( A = 2 3 ) " LA ESCUELA ( A : 4 8 A • 1 D •' + •' 1 •• { - ( •• A :23 t ( •* " POR FROUDE) •• ATTC-47) " •• ITTC-57) HUGHES,r=1.264) O o C T X I O03 A A a O n^^ O 0 O A A A D D O A ^^^."'"'^-'r A 4.0- 1 0.18 ^ ^ ^ ^^^^"^^ +• + 1 • D n ^^.^^ 1 1 0.20 1 Fn Fig. O 1 0.22 1 1 0.24 7- MODELO 4 2 6 8 SERIE 60 ( CerOJS) - ^ O PUBLICACIÓN DEL D T M B ( ^ = 30) CANAL DE LA ESCUELA 1 ^ = 64 A ° ^ " *• " " ( •• ( •• A >^:30 POR FROUDE) O A ATTC-47) " " " ( ITTC-57) HUGHES,r=1.33) 6- '.o CjXlOS - I 5- 0.10 0.15 0.20 Fn Fig. 9 — I — 0.25 PETROLERO DE 150.000 TPM - o - CANAL DE EL PARDO (A =50) O ;• •• LA ESCUELA ( A r100 A A ' " " " " ( '• . •• O 4.5- " A =50 POR FROUDE) •• .. ATTC-47) ( X ITTC-57) ( •• HUGHES,r=1.28) A 0^x103 D A A D n • 5r 4.0- o.u 0.16 0.15 0.17 Fn rip. lO-a PETROLERO DE 230 000 TPM - O - CANAL DE EL PARDO U = 50) O " " LA ESCUELA ( X : 1 0 0 A ^ '• •• " •• ( D " ' X " ! •• •• '• A:50 POR FROUDE) ATTC-/;?) ( ITTC-57) ( HUGHES r:1.42: 4,5 C^xIO^ 4.0- 0.12 0.13 X 0.14 0.15 Fn Fig. 10-b 0.16 21 - clásicos de extrapolación, sobre todo en buques grandes y de. .fprmas. llenas. En cambio, efectuando la correlación de acuerdo al método ,"' de Hughes, C^ es siempre positivo incluso en aquellos casos extremos donde el número de Reynolds es superior a 10^ y el coeficiente de bloque mayor de 0.80 . A estos efectos,son. significativos los resultados del ana' lisis de pruebas de mar presentados por Taniguchi en ref. 38. En las fig. 11-a y 11-b del presente trabajo se transcriben los valores de C^ obtenidos por el citado autor con los mismos buques empleando la correlación bidimensional con la linea ITTC-57 y la tridimensional propuesta por Hughes. La observación de estas figuras no necesita comentarios. C.xIO' -0.1 -0.4 0.6 0.t vo 12 1.9 Rn K 10-8 n l.ft O.B ( O.i tUiJ -,-«»*a4^ METOC •0 DE HUO^ E S ) f7' ( ¡ x ^ #^'W! •• - ' • • " i - a2 CaXltf .., í & S i j ^ . .nay.T. m •»^-i-fWI| 0 as 0L8 va U 12 1.3 Rn X 10-® Valores de CQ según Taniguchi Fig. 11 14 ID 22 2.14.- Rugosidad Hasta aquí se ha hecho sólo referencia a la resistencia al avance de carenas de superficie lisa, lo cual es aplicable sin duda a los modelos utilizados en los canales de experimentación. El acaba_ do de su superficie es tal que puede considerarse lisa por su compor_ tamiento hidrodinámico, No se puede decir lo mismo de la superficie del casco de los buques reales. Un buque de nueva construcción presenta una rugosidad estructural debida al sistema de unión de las cha_ pas del forro y una rugosidad superficial que depende principalmente del tipo de pintura aplicado y del sistema de pintado- La rugosidad va en aumento durante el servicio del buque a causa de la corrosión de las chapas y la acumulación de incrustaciones de algas y moluscos. Pero el efecto de éste último incremento de rugosidad no se va a con_ siderar en este trabajo, que se refiere solo a las condiciones del buque en pruebas. El efecto de la rugosidad en la resistencia al avance depen_ de de la relación entre el tamaño de las protuberancias de la superficie del cuerpo y la distribución de velocidad en la capa límite del fluido. El flujo en la casi totalidad de la capa límite sobre.la superficie mojada de un buque es turbulento. En consecuencia.la.resistencia rugosa está determinada por el espesor de la subcapa límite laminar, Si las protuberancias de.la superficie rugosa no,sobrepasan el espesor de la subcapa límite, el flugo turbulento en la capa límite no se altera, por lo que la resistencia de fricción continúa siendo la misma, y la superficie del cuerpo se puede considerar hidrodinámicamente lisa. A medida que aumenta el número de protuberancias que atraviesan la subcapa límite incidiendo en el flujo tur bulento, la resistencia de fricción se incrementa y pasa a. depender, no solo del númErorde Reynolds, sino además de la topografía de la superficie. La importancia de la rugosidad.puede ser tal. que un gran número de protuberancias alcancen el flujo turbulento, comportándose como obstáculos, con una resistencia proporcional.al cuadrado de la velocidad. En este caso el coeficiente de resistencia de fricción es independiente del n° de Reynolds y pasa a depender solo del estado de la superficie. Es difícil definir el grado de rugosidad de una superficie debido a que su aspecto microscópico es,- en general, el de una cordi llera con cumbres y depresiones de diferentes alturas y, por tanto, -23 de heterogénea distribución. Por- éso es normal definir el estado ru goso de una superficie por comparación de su.resistencia de fricción con la de superficies de rugosidad preparada artificialmente. Al hablar de rugosidad es obligado referirse a los traba jos de Nikuradse, quien cubrió la superficie interior de varios tubos cilindricos con granos de arena de distintos tamaños, abarcando una gama de realciones R/k y k entre 15 y 500 (R es el radio del tubo el diámetro del grano). Los resultados de los ensayos con estos tubos se representan en fig. 12. Como se vé cuando el régimen de la capa límite es laminar (R<2.10 ) la resistencia de fricción es igual que la de superficies lisas. En cambio, al pasar a régimen turbulen_ to se distinguen tres partes muy diferenciadas en las curvas de resi stencia , que corresponden a las tres fases explicadas anteriormente. En la primera, la superficie se comporta como hidrodinámicamente lisa y el coeficiente de resistencia se calcula por las ecuaciones para régimen turbulento. A partir de un determinado N° de Reynolds, que depende de la relación R/k , la curva "se despega" aumentando el coeficiente de resistencia hasta llegar a un punto en que se hace constante, es decir, independiente del N° de Reynolds. mC( R-V .í-^é Para habitual lisas'e emplear cualquiera incrementar pendiente tramo estimar la r e s i s t e n c i a de' los métodos el c o e f i c i e n t e de la r u g o s i d a d . de fricción aplicables así o b t e n i d o se encuentran a es superficies en una cantidad Ahora b i e n , c o n v e n d r í a de,la .curva d e . r e s i s t e n c í a de un buque de-" a v e r i g u a r 'én que la m a y o r í a buques, ya que de estar en la zona de comportamiento de los totalmente rugoso el coeficj.i.ente de resistencia de fricción se.debería calcular 24 solo en función de la relación L/íc (L, eslora; k rugosidad de gra- no equivalente) sin adición alguna. Es ésto lo que se va a hacer a continuación. En un flujo turbulento sobre una superficie rugosa puede admitirse que la distribución de velocidad media viene definida por la siguiente ley logarítmica: u_ K k . = (2.8) In Y J En esta expresión v-" es la llamada velocidad de fricción. definida por /i/p ; K es la relación entre la longitud de intercambio de cantidad de movimiento en un punto y su distancia a la pared (según la teoría de Prandtl para flujo turbulento), que en las proximidades de la pared puede suponerse constante e igual a 0.4 (o bien l/ic=2,5). Por último, Y es una constante de integración a determinar experimentalmente , que depende de la rugosidad. La expresión u V" (2.8) puede escribirse de la forma siguiente: (2.9) 2,5 Inr^ + B k donde B es la nueva constante de integración dependiente de los tres tipos de rugosidad expuestos anteriormente. Esta constante, que es ., • - Ví:k función del número de Reynolds de rugosidad R , vale en el 'nk vj caso de superficies rugosas pero hidrodinámicamente lisas B = 5.5 + 5.75 log V'k r s (2.10) Para superficies hidrodinámicamente rugosas el valor de B es constante e igual a 8.5. En la fig. 13 se representa la variación de B con R , , y-.-^en ella se pueden observar las tres zonas de rugosidad ya citadas. El significado físico de B se deduce de la ecuación Haciendo y = k ^ (2.9). resulta s u v- u ! r^/Pj (2.11) y = k. es decir, B es inversamente proporcional a la raíz cuadrada del esfuer zo tangencial a una distancia de la superficie equivalente a la altura de las protuberancias, o lo que es lo mismo, varía inversamente a C^i De aquí que el aspecto de la curva B = f(R ) en la fig. 13, sea 25 similar a cada una de las curvas C en fi'g. 12 loQio k s W v Fig. 13 Observando la figura 13 puede establecerse que si I O E R nk es inferior a 0.7 la superficie es hidrodinámicamente lisa. Si log. ^nk ®^ superior a 1.5 la superficie es totalmente rugosa. Entre estos dos valores se encuentra la zona de transición. Para calcular el valor de R , correspondiente a la sunk ^ perficie de la carena de un buque es preciso conocer su rugosidad en tamaño de grano equivalente. En este sentido, se debe hacer referencia a los resultados de medidas de rugosidad realizados en 68 buques de nueva construcción y presentados por Wellman resultados el valor de k (35). Según estos para el 80% de la muestra se distribuyen entre 0.115 y 0.215 mm, siendo el valor más probable 0.165 mm. El valor de estos resultados se ve avalado por el trabajo de Chaplin en referencia 36. Este autor estima el valor medio de'la rugosidad de las chapas del forro de buques de nueva construcción en 0.168 mm. Pues bien, suponiendo k 0.17 mm, el número de Reynolds de rugosidad correspondiente a una embarcación de 15 metros de eslo ra a una velocidad de 10 nudos (por exponer un caso extremo) es R nk - 26 26(lbg R , =1.4). En el otro extremo, en un- buque de 300 metros de. nk eslora y 17 nudos el número de Reynolds de rugosidad tiene un valor de 37 (log R , =1.5). Estos valores de R , están comprendidos° nk nk en la zona de transición de la fig- 13, con lo que se confirma que el sistema de calcular la resistencia de fricción en función del N'^ de Reynolds suponiendo la superficie lisa añadiendo un incremento por rugosidad es perfectamente adecuado. En la fig. 14 se representa el diagrama del coeficiente de fricción de placas planas en función del N° de Reynolds normal VL/v y del N° de Reynolds relativo a la rugosidad. Puesto que,. según hemos visto, la variación de R , en buques reales es pequeña, nk siempre que se trate de nuevas construcciones de casco soldado y pintura antiincrustante normal«el incremento de fricción por rugos£ dad en, placas planas viene definido por la diferencia entre las or_ denadas de las curvas A y B de la fig. 14. En definitiva se trata de un valor decreciente con el N° de Reynolds. Esta conclusión es consistente con la tendencia del coeficiente C observada a estadísti — carnenteporelanálisisdepruebasdemar. KXHc Fig. 14 Ahora, bien, si es indudable est.^ tendencia no f;:-> 1 an fácilmente explicable la sensible dispersión q u e s e observa e n ] , os valores de C , incluso cuando estos proc>;den de análisis de pruebas tan cuidadosos como Ips efectuados por Taniguchi, fig. (1'1-b), y que -3 -3 van de 0.1x10 • a 0.4x10 . Estos análisis se refieren a pruebas de buques construidos por los mismos astilleros (Mitsubishi) y los 27 ens.ayo.s ,vGo,n. mqdelo^s ,:,r;.e,a liza dos tas, c,con,die,iones Kn o íes, fácil ni -.il,a, ;.e,xg,er,ijmsnt,aci6,n i g u a l m e n t e -pqr : su,-propio ^^e ana I-i oEi^Ses' que. haya influido rren.^lar->dispersi6n.-fdecG con ,)modelQs ,,-.-n i,-la ;-i r e a l i z a c i ó n de I las £ p r u e b a s dej,:jmar,5j.^ni ^-,1,3 dif e,r]e,.nqia¡ide, rugos. i dad £,ent,r;e .-¡unos -. cascos hyept ros t n¿, '\i L9fc noÍEi?i'él"pr6'^ÍiSo^S'^afítadó^€fiátárlnios'MS*=dkr'-Üna«§x^ al-pi^'c^B'íé^'Sa^pl'^nf'e'adóí'^^^ 2.5.- ^ ^ ^ ^ o ¡: "J 1 " - í a q ^ ñ e l o b f i ^ i n o q u s obj:DnYr.>i -^b .oí>ftu::;9bi; '^rií ¡Ten; t í ;;••.•! •! o q LÍO í.i&í;i sopy-t lov. e n t r e v i s c o s i d a d y f o r m a c i ó n de o l a s Interacción ; o o ü D i o y o.^:--6^ o o ;-;-.• u; ! :,•;) .J':I j a n ó n d B v s u n 91,; ?jfc';í: ? a s u p y : quTs .•. =; de modo q u e l a e x t r a p o l a c i ó n d e . r e s u l t a d o s a l b u q u e d e b e i n c l u i r n e iíO'%i;'-í -foq no i o V i-;, A eb o ¡nüni j ' - i ^ a i I í^r Is^'-xon s J ÍLÜ ;-•-. ur:;;!! i r i n s & a x; •: n.. q c ' e s a r i a m e n t e un e r r o r p o r e s t e m o t i v o y , en c o n s e c u e n c i a , d e b e r e f l e ";:c >£L s T J í i e & i: n n-«'T-? i ;. D B .[ ';(•!.; oDxn.r:ísD s n s . i v abriisiq 3BDfiIq na bsE: — j a r s e en e l v a l o r de C . Veamos de q u é m a n e r a s e p r o d u c e . 2í* CÍO.i ;.í!iíi%. rT^)ejSÍ,st.e:nci.,a..;.P:0¡r} sf o r m a e - i o n qde o p l a s .rrpüede o c o n s i d e r a r s e 9 ó r i _ giinja-da, rp.ar £l3%v%n>e:2?:giiaoque - b a a d e sC;e,de.r, b e l v b u q ü e e p a r a fiormarnun-:;treno h de olas del (suma cuerpo vectorial de de •liois ::,t:,re,n,e:s,.ude o,laa].dél.;%cuerpoide proairíyo popa). ^ ,, El tren . ^ de olas *üí'A Hx* 'an d%-proa.'d'i'fier"é~''muyv pp''c"p"'rde 1 que 'i•'^k•:•~~:l^•:-r.—r'••r~Y=~T"•::^=r:r::•-c se produ- « c 1 r 1 a en un f 1 uí do ^s iIn __;/i_sc.qsi.d.'ad.í4.,E,n_^cIamb.|i,oi.e:ul.,Zt.E.e.ríJ es i n f e r i o r én*Ke4---fiu-í-d-o-r-ré.a-lr=d'é:bri-dLor':íra74^^^ límite ensancha^ Ky-" p-r'óU-o rí fa 'í"e í"cui-r pp'fd^^^^^^^ de olas de p o p a de la capa n t i d a d igual mas mas es iones que obtenida por-"a-p-ri-;aa-¿''a-Sri die una' cdrr;ecG'i6n ' para todas para valores te las ^ " v • • ! • • • • * velocidades, los -' ; '• • ' : • adecuada i ' " i ' • ; " 1 (C " constante ^ como n o r m a l m e n t e I se' h a i c e í ) , s e r á aumente la velocií'o. ' . Este experimentalmente : véase presenta as-í, ^ correcta de 'F"~ iFá'j o s , per!p ~supon-drá' un^ eír^ror p'or ;-,idef e c t o a medida que tado ^ resultados d° l a p o r jej-implo citada serie razonamiento la fig. se 3 en l a "geosim" del ve que Lucy crecien contras se re- Ashton, icom.Oi l o s cresAiiit-ado^sj jde 'rjemodíqiu.é i.irjeiáliz-ados ..oori ce 1~ "•'buque r e a l . Se -ve,.- q.u.eí C;.- aumienit-a.' c o n .Eir- h'áiátaísqiu'é bes-t'e'i inúim'@ro ial'ca:'nzá-tufí 9valof'¡"i"idé3 o . 2.8-:,a-para -..i'.u eigo,; ivío"-liV:eri ca í:d-ásminiuiir,:í> Tüá t'.é'aden'ciá-Ja ••diismin'uir á-pSr- ítd-.r •-.de, lap-r.'o'xdma-dáimeritfe^-iFi 1-ÍO J'2 Siopiuedéifve'rs'e' -t ambie'ffoén '-f i-gí- --í S'-'y 1^6 | y pue:de i.exp.ü. i.cansíeí ipiorj . 1 a^ v a r i a c ' t o n :::q";ii'"é'; '.'ex-pe"r i-'meri't á' l^a ' r é*s i's t é'n c i'a '•'vi s co.sraL a^l saium"e:nta-rJ i,F-l ), .-yaí -que- "cu=arí-do'!i'e's"t é'-'-Ti-úmero '-'é^s- " s ' u f i c ' í é n t e n i e n t e - ' é l a vado las lineas de c o r r i e n t e junto a la carena son distintas que a ba 28 jas velocidades y efectos prácticos es como si cambiaran las for- mas. De modo que el factor de forma de la carena varía también con en contra de la hipótesis de c orrelacion C V =f(R n ) F n 0.5LUGY ASHTON BUQUÉ MIXTO DE97METROS O.í, CQXIO 3 0.3 0.2 0.1 0.20 0.2A 0.28 Fn Fig. 0.32 15 V. 5 Fn Fig. 16 No obstante, créemeos más práctico mantener las hipótesis C =C (R ) V C =C (F ) e incluir el error de e'stimación de la resis_ V V n w w n tencia de remolque que esto lleva consigo, en el coeficiente C^. Vimos en el apartado anterior que la corrección por rugosidad era una función f. del número de Reynolds; si a ésta añadimos la corrección f, por interacción entre viscosidad y olas, resuJ^ ta : - 29 C^ = f.(R^)+f,(R^,F a I n z n n (2,12) ) = F(R ,F ) n n Esta conclusión es importante ya que la norma general de los canales que emplean una corrección aditiva de este tipo es acumular la información en función de la eslora.- Creemos que realizando el análisis de resultados de pruebas según se propone en el capitulo 6 de ésta tesis y disponiendo los valores de C^ así obtenidos como función de R y F , la dispersión será mínima, y la previsión del comportamiento de futuros buques de nueva construc_ ción en pruebas podrá ser más precisa que las efectuadas por los;; métodos actuales, Rn X10 Fig. Hasta según este que -se pueda 17 disponer c r i t e r i o , hemos p r e p a r a d o de datos a título de pruebas obtenidos provis ion al . e 1 gráfí_ co de la fig. 17 que puede representar con alguna aproximación valores de C a definidos por la expresión los (2.12). Para su elaboración se han utilizado la fig. 11-b y los datos expresados en el siguiente cuadro: 30 Tipo o -nombre V en K C X 10 Ref. n R xlO n O^l^ Ojas 0,20 0„58 0,35 1,95 0,30 '""'(3 7 ) ' ^^V 6 0,13 1,51 0,24 Según nuestro -?;•;-í' análisis 13,5 0,29 3,39 0,40 15 0,32 3,77 0,24 Mixto 16,1 0,27 6,80 0,30 ir 17,3 0,29 7,26 O ,33 17,9 0,30 0,29 18,4 0,31 7,52 7,73 18 0,23 13,01 0,2 7 15,04. 0,23 6,76 0,22 &. Victory 6 12,86 pQsquero Lucy Asht'bn ti Pasaje II 20,8 10,26 Petrolero 15,5 0,18 II a 0„35 Según' ñ.ue'strc) •' • análisis... . •' • ' • n ' '" (37) 0,24 (37) (41) 0,22 2.6.- Resistencia debida al.viento sobre la obra muerta Debemos tener presente que un barco de superficie se mue_ ve en dos medios, el agua y el aire. En los apartados anteriores hemos estudiado la resistencia que ofrece el agua al avance de la carena, pero a esta ley hay que añadir la resistencia del aire sobre 'la' obra muerta. La previsión de potencia de un buque en pruebas se refiere siempre a condiciones ideales de mar en calma y ausencia de viento. Ahora bien, estas condiciones no se darán siempre en la práctica, por lo que será necesario corregir los resultados de' prue_ bas'a las condiciones ideales. Para ello debemos estudiar la resistencia debida al viento que incide en una dirección cualquiera. La resistencia al avance de la obra muerta en aire en calma será enton_. ees un caso particular del anterior en el que la velocidad del vien_ to s e r i a l a ' d e avance del buque respecto a tierra y su dirección,-, viento'de•proa. M • tratar este tema, parece obligado referirse de Hughes, ref .(42) al.trabajo sobre resistencia del viento. El trabajo ex- perimental consistió en ensayar, tres- modelos de buques con superestructuras diferentes, correspondientes a un petrolero, un- buque de - 31 - carga y un "liner" (19 3 0 ) . Los modelos fueron ensaya'dos en posición invertida, o sea, con las superestructuras bajo el agua y con distintos ángulos de incidencia, a diversas velocidades. La primera conclusión fué que para cada ángulo de incidencia la resistencia R . es proporcional al cuadrado de la velocidad-V , en cambio, como también es lógico, la relación R ./V. varía mucho con distintos VI ángulos, de incidencia. Hughes midió no solo la resistencia R . sino también su «= VI dirección, fig. 18 y el punto de aplicación de la resultante, y definió así un coeficiente de resistencia K = R cos(a-e)/pV V 2 V 2 (A^ sen S'+A 2 eos 6) (2.13) i Jj 'íí^.'i/a Fig. 18 En esta expresión a y 9 son los ángulos que forman la resistencia y la velocidad del viento con el plano de crujía; A^ , el área de la obra muerta,comprendidas las superestructuras, proyectada sobre este plano; y A , la suma de 0.3 A.+A„, donde A es la proyección transversal de la superficie de la obra muerta hasta la cubierta máxima continua y A„ el área de la proyección transversal de las superestructuras propiamente dichas. Es evidente que la resistencia específica que opone al viento en dirección longitudinal el área A^ ,correspondiente a formas hidrodinámicas,es mucho menor que el que oponen las superficies de área A j por esta razón conviene definir un área dinámicamente equivalente. De los trabajos de Hughes se deduce que la relación entre ambas resistencias específicas tiene un valor medio de 0.3, El valor de K para los distin_ tos modelos y direcciones del viento osciló alrededor de 0.6 y la relación entre a y 6 en función de A /A en la citada referencia. se presenta en un gráfico - 32 Este procedimiento de estimar la resistencia del viento es .clásico en la bibliografía de este tema y ha sido utilizado con frecuencia, pero se le pueden hacer.dos serias objeciones. a),- El coeficiente de resistencia de un cuerpo que se mue- ve- con' veloc.idad.V en un fluido de densidad se define, de acuerdo, 2 2 2 con el análisis dimensional, por la expresión C=R/pL V , donde L puede representar cualquier dimensión de superficie relacionada con 2 2 el cuerpo. En cambio la expresión A sen O+A eos 0 utilizado por - ' , " Lf p i Hughes para definir el coeficiente K no representa una realidad geométrica según reconoce el propio autor, La elección de esta expresión se debió exclusivamente a que, con su aplicación, los valores de K ob_. tenidos por Hughes experimentalmente con los tres modelos citados, se. distribuían con menor dispersión alrededor de un .valor constant;e. Experimentos posteriores llevados a cabo por otros investigadores con diferentes buques (44), (45), han demostrado que el coefi_ cíente K definido por la ecuación (2.13) puede adoptar valores compren_ didos entre 0,35 y 0.9, lo que supone ya una fuerte dispersión alrede2 dor del valor 0.6 dado por Hughes, Según"esto la expresión A sen 9+ 2 + A eos 9, aparte de carecer de un significado real, no conduce a fat' cilitar un método práctico para estimar la resistencia del viento. b),- Cuando el viento sopla de proa, a=9=0, la expresión de la resistencia se transforma en: VI K p v ; A^ (2.14) lo cual significa que siendo K un coeficiente constante, según Hughes, la resistencia del viento solo depende del área frontal que presenta pero no de la extensión longitudinal de la superestructura o lo que es lo mismo, que la resistencia de fricción es despreciable frente a la de formación de torbellinos, Evidentemente cuando una superestructu_ ra ocupa una pequeña parte de la'eslora la fracción más importante de la resistencia se debe a la formación de torbellinos en la cara de po_ pa, pero no se puede decir lo mismo en el caso de buques de pasaje don_ de las superestructuras se extienden a lo largo de toda la eslora. Lue_ go para que la resistencia pueda- venir defin'ida por la expresión (2,14) es imprescindible que el coé'ficiente K, en lugar de ser constante, dependa de algún modo de la superficie que presenta la superestructura a la resistencia de fricción. - 33 - No obstante estas objeciones el trabajo experimental de Hughes es importante.y sus resultados, junto con los obtenidos con Otros modelos por D.A. 'Shearer y M. Lynn (44)- han sido' analizados por H.L. Dove' (45). Este autor ha llevado a un gráfico los valores del coeficiente de resistehciadefinido por: R ' . eos a va (2.15) 1 2 •TT P^ (A senQ + A cosS) Z V Li .1 en función de • e.-y de la relación A /L . En fig. 19 se reproduce este VI gráfico donde puede apreciarse que todos los puntos que corresponden a una misma dirección del viento se concentran con pequeña disper- ,' sion alrededor de sendas líneas, Debe observarse que el numerador de la ecuación (2.15) es la componente s-obre el plano de crujía de la resistencia del viento que en definitiva es el valor que interesa a los efectos de este trabajo. 09 Fig. 19 - 3¡4 Este método de analizar los resultados parece más correcto por tener en cuenta la influencia de la longitud de la obra muerta en la resistencia al viento de proa y no solo la superficie proyectada transversalmente (segunda objeción que hacíamos al análisis de Hughes) Por todo esto, es recomendable la utilización de este gráfico para estimar la resistencia del viento al avance de un buque. Por último, debe considerarse que la velocidad media del viento varía con la altura, por encontrarse la obra muerta de los buques dentro de la capa límite de la superficie del mar. En ref (82) se muestra esta variación en proporción a la velocidad a 10. metros de altura, Como era lógico, el gradiente de velocidad a la altura de las superestructuras es suficientemente pequeño para poder adoptar co_ mo valor medio el medido a bordo en una posición adecuada, (ver la'" referencia citada), El gradiente de velocidad más acusada corresponde a una zona de 5 metros sobre la superficie del agua, pero la parte del buque comprendida en esta zona suele ser obra muerta bajo la cubierta alta continua donde las formas son hidrodinámicas, y por lo tan_ to su efecto en la resistencia del viento en la dirección de avance es, como ya se ha explicado, proporcionalmente pequeño. 35 3. FUNCIONAMI.E,NTO DE PROPULSORES EN FLUJO UNIFORME. 3.1 Introducción. U.na vez estudiado el efecto de escala en la resistencia al avance' de una carena, es necesario considerar la posible varia cion con el tamaño de las características de funcionamiento del propulsor como' elemento aislado. Desde el momento en que el ensayo se basa en la igualdad de números de Froude, no es posible obtener-, si no se cambiael fluido, el mismo N° de Reynolds. Por lo que cuando, este parámetro tenga una influencia decisiva, los resultados obtenidos de un ensayo adolecerán de errores, por no haber se cumplido las condiciones de semejanza requeridas. En este caso se- encuentra el flujo alrededor del propulsor que, por estar totalmente sumergido, está caracterizado, en tanto no se produzca ca^ vitacion, por .el N° de Reynolds. En este capitulo se estudia la forma de corregir los re_ suJ.tados dé ensayo de un propulsor aislado. Esta corrección no solamente tiene por objeto poder extender los resultados obtenidos a otras hélices geométricamente semejantes de mayor tamaño, sino pro- porcionar un medio para lograr una mayor aproximación en la previ sion de resultados en pruebas del buque real. 3.2 Análisis de los resultados de ensayos con propulsor aislado. Consideremos una sección cilindrica de una pala de un pro pulsor y el diagrama de velocidades y fuerzas elementales que actúan sobre ella. (Fig.20). El empuje desarrollado y el par absorbido por cada sección están determinados por la sustentación del perfil, por su resistencia viscosa y por el ángulo de paso hidrodinámico 3.. Por lo tan_ to, el efecto de escala en estos tres valores es el que determina la variación de K Y l^n ^°^ ^^ ^° ^^ Reynolds. Parece lógico estu- diar el efecto de la viscosidad en distintas secciones y después integrar a toda la pala, pero esto requiere un cálculo demasiado corn piejo y no da mejor aproximación que el método del perfil equivalente descrito por Lerbs en ref.(4 ) , de ejecución mucho más sencilla. Por lo que se parte de dicho método en las consideraciones que siguen. Este método se basa en la hipótesis de que el rendimiento del perfil en la sección 0.75 coincide con bastante aproximación con el - 36 - • * • ' • ' • rendimiento total de la h é l i c e . Poí c o n s i d e r a c i o n e s dT = y por =- eos cose g e o m é t r i c a s , (ver (6 .+E ) kJ j, •:• ' definición gdT dk„ dL pnZD"* en fig.20) —p v^ cdr consecuencia. dK. 1T' zc D dT — IIIIBI • L cose II I I • I (x^+x2 ) c o s 2 ( 6 ^ - 6 ) c o s ( B .+E ) • ( 3 . 1 ) rtnd dQ/r Fig.20 . Sise conoce la d i s t r i b u c i ó n r a d i a l de empujes es posible deter • dK^ m i n a r - -r—dx en función . lado.Mazarredo del K„T o b t e n i d o en r e f . ( 5 6 ) d e m u e s t r a de los ensayos j de p . r-r o p ru l s o r que p a r a p r o p u l s o r e s . con ais_ mínima dK, pérdida de energía la función Si grado 'de a v a n c e , número valores ^Ti = T ( X ) es i n d e p e n d i e n t e dx de palas y carga del p r o p u l s o r , y calcula del los de esta función en d i s t i n t a s secciones de la p a l a , (para dK,,. 1 = 1 . 8 4 ) . En primera a p r o x i m a c i ó n es a d m i s i b l e sux=0 . 75 , K Ti dx - 37 - poner que la función T ( X ) ' e'g prácticamente la misma ya se. trate de empujes ideales, o reales, p o r l o que se puede establecer. dK, dx = 1.84K. (3.2) En hélices no muy cargadas, las velocidades inducidas son pe_ quenas por lo que prácticamente en todos los casos puede suponerse eos )=1, eon lo que se puede ya establecer de (3,1) y (3,2) ( cose 0.746- ^^ .K„ zc T .r-n^^.Z 5D25+A^ c o s ( 6 1. + e ) (3.3) expresión donde todos los términos son conocidos a excepción de 3. ye. La suma de estos valores se puede calcular teniendo en cuenta que el rendimiento de una sección del propulsor depende exclusivamente del ángulo B.+e * /o (fig.20): ^ dQ 2 te( P . + E ) = — - ^ = — ^^ i ^ rdT xD X 2iTn • dQ 2 xD tg(B^+e) Según do • —-^ dT la h i p ó t e s i s V (3.1+) 27rnn xirn es t a b l e e i d a ^ p a r a x = 0 . 7 5 , n =n y en conse- cuencia "g^^i^^)0.75 = O . 7 5 TT n (3.5) Es frecuente suponer cose=l, lo que es correcto en general, pero como luego veremos, este método de análisis se emplea también para determinar el C mínimo de la sección, y este valor se encueiV tra con ángulos de ataque próximos a cero o incluso negativos. En esta zona de trabajo del perfil C es ya comparable a C , y en con- secuencia no es admisible suponer cose = l. Por lo tanto conviene in_ troducir el valor real, aunque en los cálculos se puede partir de £ = 0 para continuar el proceso iterativo que se explica . seguidamente . - 38 Según la teoría de circulación, ~' zc . XK. sen3^ tg( B^-.g) (3.6) de esta expresión es posible obtener el valor -de g . .suponiendo en priinera aproximación sen (e^-6) = tg ( B ^ - B ) = 6^ , (3.7) .2xJ • ^- 2^^ zc TTD K i+xcosB el único .término desconocido es el 'factor de Goldstein < que, para una, sección determinada', es función de X . y del número de jpalas . Como. ,A...=.xtg6. se puede obtener el valor de ambos X. y g. por ite..•.":•. •' • !'• •• ° 1 . : ^ , 1 -^ r.actiqnes sucesivas. Partiendo, por ejemplo, de X. = X 1 *^ . solo se re-' quieren normalmente tres iteraciones para obtener tres cifras'"éxac_ t a s . . • - . . . Se pueden ya calcular los s iguiente's'valores : ..... • • ' . . • . . ' -' • . e = ( B . +e ) _ B . Con este valor de £ se vuelve a repetir el proceso a partir de (3.í3)donde se había supuesto como valor de partida e = 0 hasta ob_ tener el grado de exactitud deseado. .. La resis.t.encia viscosa del perfil, según este análisis,es . . . . . , ' • • ^ ' ° = ^ L ^ g ^ ^ • - . . ••.- ..•'••• Por la misma razón que no se ha admitido anteriormente lá simplificación cose=l, no se admite aquí tge=e. Se ...p.uede comprender, siguiendo esta exposición, que es sumamente rápido y sencillo deducir el diagrama completo de fuerzas y velocidades ..(fig. 20) del p.erfil equivalente de una hélice conocien_ do las curvas características K = f.(J), K = f^íJ) obtenidas de los ensayos de .propuls ir aislado, si se emplea para el cálculo un Ojrjdena-dor. Naturalmente, este proceso debe repetirse para distintos grados de avance • abarcando así todo el campo de- funcionamiento del propulsor. El método pierde rtíucha exactitud en la zona de pe- -39 - queños valores dé J,; ya que se bas,a en la hipótesis desque la héli_ ce funcione con carga moderada. 3.3 EXTRAPOLACIÓN DE RESULTADO'S AL PROPULSOR REAL 3.3.1 Efecto de E s c a l á e n C L- Se dijo al principio que el efecto de escala en K„ y K^ vénía determinado por la variación de C , C y 6- del perfil equiva- lente con el número de Reynolds. Hasta hoy se ha venido consideran^ do que la variación de C^ y g. debida a la viscosidad pueden consi ^ L 1 : • — derarse despreciables a partir de un Reynolds crítico que Lerbs f£ jo entre 3x10 5 c; y4xl0^. Según este criterio, para obtener las curvas características dé un propulsor real a partir de los resultados con un modeló', se calcula teóricamente el valor de C' que corresponde al perfil equi_ valente de la hélice real, con lo que, suponiendo C =cte, se obtie^ ne tsE C' • ^- —^ (las letras-prima indicarán valores de la hélice a es- cala natural). En la ref('56) citada anteriormente, Mazarredo calcula la relación entre los empujes real e ideal y los pares real e ideal de cualquier hélice poco cargada de núcleo d /D=0.2. X^tge T . = 1 1 - 1 ,, b 8 X'i 1 x^,tge Q. r + X . 1 X . y- X . tgE (3.8) "Qi 2 1, •= 1 ^ 3 X . (3.9) •tge .1 son las abscisas de los centros de gravedad, de las curvas de distribución radial de empujes y fuerzas tangenciales respectivamente, y que para los propulsores Betz toman los valores numéricos que se indica. En consecuencia, las características del propulsor real del buque vendrán determinadas por las•siguientes expresiones: 1-1,68 A . tge' K'- K^^(1-1,68A^ tge') 'T 1-1.58 X . tge (3.10) 2 1 •" , '•^Q K ••• l ! ? /1- • < 3.-11) - 40 - J ÍÜ 27r S (3.12) Obsérvese que el criterio C' = C ; 6 1 cuencia que al aumentar R , K disminuya en la relación fi. tiene como conse' 1 aumente en la relación A ' C'/A-:C. y- K^ A'B'/AB (ver fig.2l) Esta conclusión no se ve contrastada por los resultados de en sayos con modelos a números de Reynolds crecientes pues mientras K_ aumenta en todos los casos, K disminuye unas veces, y otras, quizás más frecuentes, aumenta. Para tratar de esclarecer este problema, hemos analizado los resultados de ensayos realizados en el Canal de la Escuela con el propulsor n° 8 de 112 mm. de diámetro construido de acuerdo con la, serie B de Wageningen y cuya relación espesor/diámetro coincide prác ticamente con la relación standard de dicha serie B. Las curvas carac terísticas del propulsor semejante en esta serie ha sido igualmente analizado por el método descrito. En la fig.22 se presenta el diagra ma de fuerzas de los respectivos perfiles equivalentes con un grado de avance J=O.U correspondiente a la zona de proyecto normal- Se debe recordar que AB es una medida de K. en la escala conveniente tinta de la empleada para C y C . ) , y OB la medida de K (di£ también en una escala adecuada. La diferencia entre los valores de C , K y K. de ambos propulsores es de -10.6%, -11.8% y -3.7% respectivamente. Diagrama de fuerzas dsl perfil equivalente del propulsor n- 8 D:112mm (Rn:1.3x10') y de su semejante de la ssne de Wagéningen O ;240mm(Rnr3)fiO RAP:0.68 Diogramo ds fuerzas delperfíl equivolants del propulsor n- i ensayado a distintos números de Reynolds (5x10* y 9 K 1 0 * ) D:73mm zr 5 RAD=0.68 P/D:0.61 J : 0.4 P/b:0.68 Jz 0.4 Fig.22 Flg.23 ^2 Es evidente que la hipótesis universalmente aceptada C'-C supone en sí un error del mismo orden que el efecto de escala en K que se pre_ tende corregir, y muy superior al efecto de escala en K . De modo que s,i pretendiéramos obtener las curvas características de la hél_i_ ce de Wageningen (D=240 mm. ) basándose en los resultados de ensayos con,el modelo de 112 mm. y en la hipótesis C ' = C , se cometería un error por defecto del orden de 10.5% en la previsión de los valores de K^ y KQ. • Gráficamente (fig.22)5 esto supondría aceptar A"B'' como medida de K' en lugar de A'B', y OB" como medida de K| en lugar de OB ' . • ,,. En.la fig.23 se representa el diagrama de fuerzas del perfil equivalente de otro propulsor de menor tamaño (D=73 mm. y P/D=0.61). S,e ha ensayado d.os veces a distintos números de Reynolds. En este ca_ soK,. h a d i s m i n u í d o a l • Q bría esperar si C cias en C , K y K aumentar R n pero no en la proporción que ca^ hubiera sido constante. En este caso las diferen son respectivamente -8.3%, -9.8% y +4.5%, valo- res; .s imilares a los obtenidos para el propulsor n° 8 con la excepción de K' - K Sé que cambia de signo. han presentado resultados de ensayos subcríticos porque los propulsores' de los modelos de buque que se ensayan en el Canal de la Escuela' tienen normalmente diámetros inferiores a 150 mm. Pero la ne_ ce'sidad de conocer el mecanismo de extrapolación a propulsores rea••l'e's ,t nos ha'obligado a dar un 'carácter más -general a este trabajo, y a analizar' el comportamiento' de modelos propulsores de tamaño in.,t,er.med.io. Para lo cual se ha elegido los geosim del Victory (ref.(54. ) que, cubren, una amplia gama de tamaños desde X = 50 (D= 106mm) has ta A = 6 ;(D = B83 mm, ) . Se trata de un propulsor proyectado por teoría de circu_ .1ación distinto del proyecto original para e?te tipo de buques. En'"iá ¿ifada refí54) los propios autores analizan los resultados de loé ensayos en • aguas libres por. el método de Lerbs y presentan una tabulación de los coeficientes y ángulos que determinan el diagrama de Velocidades y fuerzas de los perfiles equivalentes. Con estos datos'hemos construido un diagrama de fuerzas (fi.g.g4) de modo semejante a los representados en fig.22 y 23, Se puede observar que los extre_ mos de los '•vectores C + C^ , C' + C' , etc. se encuentran en una linea -próximamente paralela al eje de la hélice, lo que equivale a decir que K es prácticamente constante si se compara con las varia- ciones de K y C . En efecto la diferencia entre los valores de C. , 1+3 K y K de los modelos X=50 y ^=6 es dé -8.5%, - 9 % y - 3 % . Es decir, se confirma en modelos ma yores el comportamiento que ya habíamos observado en modelos subcrít icos. Es interesante considerar el modelo ^=23 por tener un diámetro de 230 mm., tamaño del orden del adoptado para ensayar los modelos de las series sistemáticas cuyas curvas características se emplean con tanta. frecuencia en el proyec to de propulsores de buque. El número de Reynolds correspondien te a estos ensayos puede conside^ rarse supercrítico y, en conseDiagrama de fuerzas del perfil equivalente del propulsor del Victory a distintas escalas (Wageningen) cuencia, el efecto de escala en D:5.30m (X:1) z:¿ RAD:0.¿54 P/D=1.002 J = 0.6 lores de C , C debiera ser despreciable. Pues bien, la diferencia entre los va K y K de los mode los ^=23 y X=6 es de.-2.7%, -2.6% y -1,5% respectivamente. A la vista de estos resulta" dos no parece correcto admitir ia constancia de C. con el N° de Fig.24 Reynolds ni siquiera a partir de los valores considerados críticos, ya que, como se dijo anteriormente, esta hipótesis conduciría a prever valores de K decrecientes.al aumentar R , cuando la realidad es que su disminución con C se ve compensada e incluso superada por el incremento debido al crecimiento de C.. En cuanto a K„, el error que se comete al considerar Cj constante es muy superior debido a que el efecto de escala en ambos valores es de la misma magnitud. Sería deseable conocer la variación de C con los R empleados en los ensayos y a escala natural, del mismo modo que se conoce con - 4H - bastante aproximación él Valor de C , ya' qué üé 'ést-ai man-era quedaría resuelto''¿1'problema' dieir efecto *de escala en- propu-rs^bréS". ;Pero''ie-ntpetanto, y como una solución práctica puede ser 'ac'eptabre' sustituir- lahasta hoy admitida hipótesis C^ = cte por la aproximación K-=cte. ' ' • • • • • • • - . ' " - , " " / • " • • . , • - . • . . • •< • ^ En 'este caso, para oalcular K'l es necesario conocer 'previamente e l rendimiento, y éste se ipuede d ' e t é r m i h á r a p a r t i r de' ' ;, tg( 6,,+ e ) ^^ ^^ ^:¿ . - a r e -tg-, —r (3.13.'a)í/ ^ « ^ ^ í ^ ^ i ^ O.T'S El efecto dé escala en g• es pequeño, como puede verse en figs 22 23 y 24y sü variación es tal que 6'.> 3. .Además como e¿/CJ^<C¿/Cj^, y la diferencia entre estos valores'és también pequeña y del 'mismo ' orden que 3'.-6., se puede establecer BI + C¿/C^ = 6^ + C¿/Cj^, y én'. conséc-uenciá(3tI3a) se convierte eh' "• - •• are tg ~ n' =n tg(B.te')o^,5 • • (3.13.b) L ' ^ . • • • - " • con lo que- se puede y.a obtener el, valor del empuje, : K - = fL.KQ.n- í-S.m) •• ' : Para -tener una. idea cuantitativa, de la inf luenci,a_de.. la^.adopr ^^ ción del nuevo criterio en. la extrapolación de reS;Ultados.. ..de^ ensayos,, heroo's calculado .lo.s .valores, de .K„, K- y n para el; modelp, d^l, p.rqpul,-, .. sor del Victory a escala X=6 partiendo de los resultados-de ensayos :. con el modelo x=23, basándonos sucesivamente en las dos hipótesis C'=C- y K ¿ = K Q , y los valores hallados se han comparado con los obte ni4os experimentalmente con el modelo x-6, . :,Los .resultados se :resu.men.; en eL siguiente . cuadro: , • • ,, , . ..:.., lOK, Valores reales Hipótesis C' = C error- 0.248 0. 243 0.386 0. 376 0.614 0j'617 ••'• '+ ¿.5% • ; •-, , Hipótesis 1 - K.=.K, error -2 % 0,246 - 0 . 8% -2.6% 0.381 -1.3% ''0.616 + 0. 3% '^ U5 - Puede ,ser de interés repetir estos cáiculos partiendo de los resultados de eñ.s'ayos con el modelo, X = t).0 cuyo tamaño (D=132 mm, ) es similar al de los modelos utilizados en el Canal de la Escuela, Valores reales Hipótes is C ' =C error 0,248 0.233 .6 % O, 2^+6 -0,8% 0,386 0,360 •6,7% 0,379 -1,8% 0,611+ 0,618 + 0, 6' O ,620 +1 % 10 KQ, Hipotes is error Como es lógico.ningún autor recomienda extrapolar los resultados de ensayos con modelos subcríticos a causa de la sensible varia_ ci6h de C , pero, aún así puede verse que la aplicación de la hipótesis K =cte en el segundo ejemplo mantiene las previsiones de K , K y ;n dentro de una aproximación similar a la conseguida en el pri- mer ejemplo, y en cualquier caso mejor que la conseguida con la hipotesis C =cte. 3,3,2,- Efectp de Escala en C . Rugosidad Hemos visto que- él análisis de resultados de ensayos con mode_ los proporciona también el valor de la resistencia viscosa C del per_ fil equivalente, lo que supone una importante herramienta en la extra_ polacion al propulsor real, A pequeños ángulos de ataque se produce un mínimo de- Tesistencia que prácticamente es toda ella de fricción y su valpr será equivalente' al de una placa plana de igual longitud multiplicado por un factor de' forma que, según Hoerner, es l+2t, por lo que ;se puede, escribir, C^ . Dmm ,•; (3.15) = 2C-(l+2 - ) •f c donde 0^. es el coeficiente de fricción de una placa plana, cuyo valor puede ser expresado por la•fórmula de Hughes (la ITTC-57 lleva implícito un factor de forma) para superficies lisas, '•'•'„ 0.067 ^(.i°gio (3,16) \-'^' o por la de Schliehting para superficies totalmente rugosas, C^ = (1,89+1,62 l o g ^ ^ l - ) s -2 5 * . (3,17) - 46 Si se admite que, en primera aproximación, la diferencia entré de ataqué cualquiera yj C_Dmín . es , - ,él valor de C_D para un ángulo * -^ . ^ independiente déi número dé Reynolds, se puede estimar el valor de la resistencia al avance del perfil equivalente en el propulsor real por.-,,la siguiente, expresión, - ^.D = 2 CL (.1+ 2-) + (C_ - r c ü donde .los valores de C C (3.18),. min) son obtenidos por análisis de los resultados d.e-; e,nsay.o,,, ' ..••.•'• . . • . Solo queda analizar el grado de rugosidad de la superficie , dé' las •palas de la hélice para.'poder estimar el valor de C' . Wellman réf'.''"{55 }'prese'nta los resultados de las medidas de rugosidad realizadas por la B.S.R.A, desde 1954-,en hélices de 43 buques de nueva cpns^ trucici.on y 15 buques después, de períodos de 6 meses a 6 años en se£ vici.-o,-,; .,La. rugosidad de los propulsores considerados antes de las. prue_ bas de mar oscila entre 0,025 mm, y 0,075 mm..v. y el valor medio; ponderado es K =0,048 mm, en tamaño de grano equivalente, , s Para los propulsores en servicio se puede adoptar K =0,12 mm. para condiciones medias, si bien este valor puede variar ampliamente con las condiciones de servicio y tiempo fuera de dique. Teniendo en cuenta las consideraciones expuestas en el apar tado 2,4 de este trabajo, el numero de Reynolds R , referido a la •* ' ^ nk rugosidad ,indica si una superficie real se comporta hidrodinamicamen te como lisa, o totalmente rugosa, o si se halla en la zona de transición. Los valores de R , que hemos calculado para hélices nuevas ^ nk ^ de distintos diámetros y funcionando a diferentes revoluciones de acuer do con el valor k =0,012 mm, está por encima de 40 en todos los casos, es decir, su logaritmo decimal supera el valor 1.5, Puede considerarse, observando la figura 13, que la superficie de las palas de cualquier propulsor en pruebas se comporta a efec tos de resistencia como totalmente rugosa (el propulsor en servicio, con mayor motivo). Por lo tanto, para calcular el valor de C^ de una hélice real se debe emplear la formula (3.17), Las ideas expuestas en las páginas anteriores de este capitulo pueden resumirse en los siguientes puntos: 1,- Existe un sensible efecto del N° de Reynolds en el funcionamiento de un propulsor en flujo uniforme. _ 1^7 2.- Para estudiar este efecto de escala es adecuado el.método del perfil eq.ui.yalente propuesto por Lerbs , con las pequeñas modificaciones que se indican en este trabajo. 3.- La hipótesis C =cte no es admisible para extrapolar los L valores de K„ y K , debido a que C está sometido a un efecto de ,es1 Q • L cala del mismo orden que K„, y a que puede conducir a correcciones' en K de .signo contrario. 4,- Puesto que C aumenta al tiempo que C_^ disminuye con el número de Reynolds, la variación de K es proporcionalmente menor que los incrementos de C y K , por lo •> que la extrapolación de resultados L T d^ ensayos basada en la hipótesis K =cte conducirá a mejores previsi£ nes . 5.- La superficie de las palas de un propulsor real puede considerarse totalmente rugosa en su comportamiento hidrodinámico, incluso en belices recién construidas con un acabado normal. - 48 t|.-'•'I-NT^E'RACCION ENTRE EL CASCO''Y EL PROPULSOR 4 , 1 , - C o e f i c i e n t e s de ,:,r cia •;,;,,Hasta al flujo avance ra forma esta • ' • Es p r e c i s o la la • abordar potencia velocidad potencia • propulsión» resistenr de , u n a j c a r e n a y ,,en;.,e lp,f u p , c i o n a m i e n t o . d e l . . . p r Q p u l s o r :,en -.,,,: de c a l c u l a r conseguir ..i ,,,.!••... a q u í , s e , ha ¡ e x p u e s t o ; , e l , efe c t o i de.,escala,.en... l a uniforme. tratar . • . , ; ' . de m á q u i n a s deseada, impulsando . ahora e l problema que se a instalar en e l y al proyectar a l buque con e l I La s i t u a c i & n habitual buque la hélice empuje . ' • 4'o'1,1, plantea •" • que al pa- trans- necesario» . . de l a s hé'l'i'cé's' a ' p o p a • de 1 b u q u e V da l u g a r a q u e s e c o m p o r t e n como v e r d a d e r o s . s u m i d e r o s . h i d r o d i n á m i c o s , a l t e r a n d o e l c a m p o de v e l o c i d a d e s y p r e s i o n e s a l r e d e d o r de l a c a r e n a . Como c o n s e cüeTicí'a-'s'é' p'rddúcé"'-üñ a u m e n t o por dos conceptos : ' ' 'a) , - n a de p o p a ^ • ' ''•'- La h é l i c e de l a carena, dé 1'"-ve r s o r ' n o r m a l ' ' á mento de l a (o h é l i c e s ) precisamente íá-'superfi'cie resistencia de'la r e s i s t e n c i a ' a l • avance • '•' • ' •• • ' '- ' ' ''" ^ ' " da o r i g e n donde '' • ' ' ' - " ' ' ' ••"• á juna'depresión la componente en l a • •'' '"'•- "" " zo longitudinal 'és'' m a y o r , ' É s ' t ' ó ' d á ' i'ug'a'r"a lin de p r e s i ó n , - incre- ' .- -..i. .^..--3 •""•-" '•' 'b),—-'L'ai d é p r ' é s i ó ' n ' 'á-'-pop'a p ' r o d u c é ' ' u i í "áum'ent ¿ ' ' d e " l a ' ve l o c i d a d d e l ' f l u j o ' - j u n t o -a ^ l a ' • c á r é r i a ' , ' ' ' Í o " q u e ' ' o r ' i g i n a '•ünk m a y d r ' ' r e ' s i s t " ' e r i c x a de f r i ' c c i o n , ^ • '• '• ' í' ••-:•••;- ^ ' i'':----;^-^ '•• , ./ '•^^-'^ •• - ••> - .^.'.'V,.- ¿I. „ ,,i. ;,jo.: •• En d e f i n i t i v a , da e s p r e c i s o tencia que e l de r e m o l q u e Se d e f i n e •: para que e l propulsor de l a el carena buque proporcione a la coeficiente misma avance a la un e m p u j e velocidad m a y o r q u e ,1a desea resis velocidad. de s u c c i ó n con-,-la ve x p r e s i o n T-R T... r - t ^ — • c^-iy'../ ^.- ^ 4,1.2. Por otra parte, la hélice ha de. trabajar en un flujo que dista *m'ucho de ser uniforme. Una parte del siseo de; "la hélice (cuan do no su totalidad) se halla situada dentro de la capa limite, de la ca fena, donde '."el régimen es turbulento ,y. .con una distribución no uniforme de los valores medios de la ve'locidad en cada punto. El resto de la su perficie del disco está atravesado por un fluj.o que se puede considerar esta-cionario (flujo potencial) pero que-,-''en- cuá'lquie'r caso tampoco es uni forme. "Este campo' de velocidad'és en el'"que realmente funciona el pro pulsor es el que se denomin"a''es't'é'ra''deY'buque'.' 'Su determinación "e'xperiment al.-me diante tubos de Pitot, o dispositi-vos análogos, se realiza ne cesariamente retirando el propulsor ,por lo que la. estela medida, conocida como estela nominal, difiere sensiblemente de la estela real. No - ^9 -:. obstante, la estela nominal es útil porque proporciona una imagen bastante aproximada de, la distribución de las velocidades reales en el di_s GO de la hélice, información impres cindible para- e 1 proyecto de propu_l sores.por teoría de circulación y para el estudio de la cavitación en las palas y de las vibraciones inducidas por la hélice. Llamando v• a la componente axial de la velocidad relativa a ^ del agua respecto del disco de la hélice en un punto del mismo, se define como coeficiente de estela local a la relación V -Va w " siendo V V la (4e2) • velocidad del buque. La integración de w a toda la superficie del disco se denomir na coeficiente de estela nominal axial, 1 De m a n e r a nal radial y Por sora resulta velocidad puje El se definen los coeficientes de e s t e l a nomi- tangencial, lo que se refiere más p r á c t i c o el efectiva uniforme para que f u n c i o n a n d o ciones. lo análoga de e s t e l a de un f l u j o C^.3) w r dr de n en coeficiente la la a la estimación concepto V a el estela de e s t e l a de e s t e l a igualdad cual de l a efectiva. de e m p u j e , propulsor real a las a igualdad Se propuldenomina a la proporciona del buque efectiva potencia velocidad el m i s m o eni mismas revolu- de e m p u j e es, por tanto, „ filial: igualdad V Análogamente de p a r , V-V w. • : se define el coeficiente («..) de e s t e l a aQ efectiva a (H,5) V •+» 1 , 3 s La r e l a c i ó n cia de m á q u i n a s absorbida entre porla la .potencia hélice P ,.. s e d'e r e m o l q u e denomina P y la poten rendimiento de propulsión 5 (4,.6) "D=- D 2TrQn Teniendo en cuenta las expresiones (4,1) y ( M-. 4-) ,. el rendimien_ fo de propulsión puede también escribirse asi, T V n. 'D aT 2iTQn 1-t 1-w, (4.7) - 50 y multiplicando el numerador y el denominador por el par Q que daría el propulsor en flujo uniforme a las mismas revoluciones, resulta T V 1-t al 2TrQ n o 1-w, (4.8) = n'oT donde grado n „ ^s e l oT de a v a n c e dimiento rendimiento J„ = v rotativo /nD, que d a r í a dimiento el ahora del a igualdad la de expresión empuje. (M-. 5 ) en numerador y denominador la hélice en f l u j o de p r o p u l s i ó n "D p r o p u l s o r en un f l u j o u n i f o r m e con un -^ -^ riu-r ^ ^ ®1 r e n d i m i e n t o d e l c a s c o y n rp e l r e i i relativo, Considerando y multiplicando nrT n, 'HT uniforme a las de (4.6) mismas lugar por de el la (H.M-), empuje T revoluciones, el ren_ es T V o aQ 1-t 2T7Q n 1-w, T (4.9) = %Q' ^HQ-^Q Estos rendimientos son análogos a los definidos pn (4,8) pero en este caso se han obtenido por identidad de par. Como puede apre ciarse en cualquiera de las dos expresiones(4.8) (4,9) el rendimiento rotativo relativo es un índice comparativo entre el funcionamiento del propulsor en la estela real y en flujo uniforme. El producto de n por el rendimiento del propulsor en flujo uniforme es el rendimiento real de la hélice colocada en la estela del buque ( n „ ) . B 4.1,4, La determinación experimental de los distintos coefi_ cientes se realiza de la siguiente manera: A partir del ensayo de auto propulsión se calcula el valor de K para una cierta velocidad V del modelo. Con dicho valor se entra en la curva característica de la héli_ ce K =f (J) en flujo uniforme y se obtiene el grado de avance corres^ pendiente, con lo que el coeficiente de estela efectiva a. igualdad de en)puje es (4.10) T donde J expresa la relación V/nD, Al valor de J obtenido corresponde un coeficiente de par en la curva K^ =f„CJ) de la hélice en flujo uniQo 2 forme distinto en principio del K obtenido en el ensayo de autopro- pulsión; el cociente de ambos según ecuación (4.8) es el coeficiente rotativo relativo a igualdad de empuje K,Qo - Qí nrT (4.11) -51 El rendimiento • n^rp es el que corresponde a la hélice en flujo uniforme para un grado de avance J_,. Y por último, el coeficiente de succión se determina según ecuación (4.1) donde T se mide en el ensayo de autopropulsion y R en el de remolque a la misma velocidad^ La determinación de los coeficientes definidos en ec.(H,9) se realiza de manera totalmente análoga a la del caso anterior, por lo que no es- necesario repetir' el proceso a seguir. Normalmente, se utilizan más los coeficientes procedentes de la identidad de empuje debido a que en los dinamómetros de autopropuj. sión la medida del empuje se efectúa con más exactitud que la de par. Algunos autores han utilizado la semisuma de los coeficientes obtenidos con una y otra identidad, pero este es un mal sistema que' solo sir_ ve para mezclar conceptos e impide la adopción de un criterio estable y realista. Como se sabe, el ensayo de autopropulsion se realiza remol cando el modelo con una fuerza igual a la diferencia entre la resistencia específica de éste y la del buque, con el fin de que la hélice del modelo funcione con la misma carga específica que el propulsor real, De esta manera se tiene en cuenta el efecto de es cala-.en • la resistencia de remolque. Ahora bien, con ésto no se consigue la semejanza dinámica entre el modelo y el buque, ya que debido a la viscosidad, la estela del,modelo, sobre todo en buques de una hélice, es considerablemente mayor que la del buque, por lo que la hélice trabaja con una carga pr£ porcionalmente mayor.. En resumen, a velocidades de avance semejantes (F-nm =.F=ns•• )• y con resistencias al avance r-proporcionales, las hélices del tmodelo y.'de 1 buque trabajan en puntos de funcionamiento distintos. A esto hay que añadir el efecto de escala en las curvas características de-la hélice, expuesto en el capítulo 3, y en el coeficiente de suc-/^" ción,- según se. verá mas adelante, 4-, 1. 5 - Hechas estas consideraciones es evidente que la correcta. previsión de la potencia absorbida por la hélice y de las revo luciones necesarias para alcanzar una determinada velocidad requiere un estudio analítico de cada uno de los factores de propulsión. ; • ' Dado que.es imposible deducir de los resultados de pruebas de mar todos los coeficientes de propulsión, según se verá en el capí tulo 6 ;, hemos optado por estudiar el efecto de escala de estos coeficientes en el rango de números de Reynolds qué se consiguen con mode- los. Para ello hemos efectuado en el Canal de la Escuela de Ingenieros - 52 Navales además de los ensayos de remolque ya citados, ensayos de auto propulsión, y propulspr aislado con los modelos correspondientes al í)u_ que "Victory" (X=48), al modelo 4268 de la Serie 60 (X=64) y al petr£ lerq de 1,50,000 TPM, éste último en dos escalas diferentes (X = 100, XT65). Los resultados numéricos obtenidos se han representado en . las páginas .53 a 56 y se representan en las figuras 28,29 y 30,. junto con los valores deducidos de los ensayos con modelos de aproximadamen •t;e doble tamaño realizados en otros centros (El "Victory" y el "petr_o 4.éro"j' en el canal de El Pardo, y el tercero en el David Taylor M . B . ) , En estas.figuras puede observarse la sensible influencia de la viscosidad en los diferentes factores en los tres casos considerados. No obstante cabe destacar como más importante el efecto de escala en la estela, por cuya caus^ se modifican casi todos los restantes coeficientes. En efecto, podemos considerar como coeficientes primarios los de estela w „ , succi6n t y rotativo relativo n . Los demás dependen o son combinación de éstos. El rendimiento del propulsor aislado n para un grado de avance determinado está sometido ,como ya se sabe ,a un efecto de escala,, pero además, el rendimiento T\ que se obtiene del análisis del ensayo de autopropulsion depende del grado de avance y éste se modifica si varía la estela. En los modelos pequeños, dQnde la estela es mayor, la hélice actúa con un grado de avance menor pa.ra la velocidad correspondiente. Por lo que su rendimiento ha de ser menor que en un modelo grande aun suponiendo que no existiese efecto de escala en el funcionamiento del propulsop. Por lo que respecta al rendimiento del casco r\ , vemos que' disminuye al aumentar el tamaño del modelo debido a que el efecto de escala en la estela es' mayor que en el coeficiente de succión.- En carn bio no se observa una variación notable del coeficiente de propulsión r\ . Esto es debido a que, de los tres factores que lo componen, los dos más importantes n„ y n • H varían en distinto sentido con la escala y, o • . en consecuencia, su producto no varía demasiado. En cuanto al coeficiente rotativo relativo, no se observa una tendencia dominante en su variación' con el efecto de escala. Es preciso advertir que este coeficiente es sin duda el de determinación experimental.más incierta, debido a que su valor procede de la comparación de iQS pares motores medidos con el propulsor en flujo uniforme y colocado tras la carena, y ya se ha dicho que la precisión de estas, mediciones está subordinada a la estimación de las pérdidas de fric- VICTORY ;'• '- ~- ''• '^ . ; • ÉtISAYO : '•'••;• ENSAYO ri 1 •': Kr- . ; •••' PE A U T O P R O P U L S Í O Ñ /RicciofJ •• •• .. tío v(i . : • • . ' ,, •-• . ' .• "• "'.. ::• .; •' • '" ,. . •- VS ; NUDOS '• • SUCC ETAR l.OOGO 1.0119 1.0199 1.09Ü5 l.üi(9G 1.0593' 1.061*8 '- ; ; .••, " •; • .. ,:: .-- ^ ,";. ,;. . .... .'DFÜ KG*M 0.00787 0.0Ü85Í n.U0'J35 0.01018 Ü.01102 0.Ü1133 0.01105 KT . KG Ó.152 0.162 0.171 0.180 0.190 . 0.198 •0.-205 KQ 0 ,, Ü 5 1 0 0,.UitOS 0 , .•U2Ü 5 0 ,. Ü I I 4 7 0.2950 0.2150 0.1270 0.030U RESULTADOS 1*28.1(1*5 1(1(3.1(09 .. 1*67.939 1*36.837 507.816' 517.1*63 5-25.687. 0.1900 '0.1977 0.203G O.líCiiü 0.2210 0.2327 0.21*02 1 9 í7 .• :. • Qo .'To " lili .13.931* ll*.UGÜ • 111.972 15.1*97 16.036 16.225 " 16.i(li( .1 : • ~ ; "!' -^'^ :; V I S C O S I D A D C IN EÍ1A-T I CA DEL AGUA-DE L C A I 1 A L - ' O . d o O ü ú i ' í 2 2 y 2 / S ; ; V I S C O S I D A D C l t l E M A T I C A DEL AGUA DEL' MAR 0.000001188112/5DIAI'iETRO DEL PROPULSOR DEL f O D E L O - - — -0.130 M S U P E R F I C I E MOJADA DEL MODELO -'• 1.591 •.M2 flUIIERO'DE EvJES OEL CUQUE 1 ' • . KG .', • KG 1(35.000 •• Ü . l r l 2 9.321 It5'5.üü0 n.l*UG' 0.3514 li75.00O 0.1»80 \ o;33S 1*95.ÜOÜ • . U.52Ü: ;0.1t62 . SI'G-.Ü'OO -0.5GÜ.0.U75 521*.ÜOO .0.577 -• •0.1*91* 531.000 0.591*, ,. • n\512 :•; . RT iTTC MODELO M ; D A T O S -. • D E f l S m A n DEL AGUA DEL C A N A L - - 1 Ü Í . 8 G K G G 2 / M I Í DENolDAD DEL AGUA DEL M A R - - - - 1 0 I ) . 61KG S 2 / M 1 Í ESCALA----------IjU.OÜ ESLORA.DEL MODELO 2.8111 •SUPLEM.EtlTO POR RUGOSIDAD 0.0UÜG2Ü' FACTOR DE FOIÍMA l.liU M/S 1.03U 1.073 1.111 1.150. 1.190 1.201* 1.218 , ^... OM'' KG*M TM l'G 0.Ü0751 0.00323 0.00892 0.ÜÜ967 0.0101*8 0.ÜÍU89 0.01129 • 0.301* 0.356 . 0.3C8 0.1*37 0.1(50 0.1*73 0.1*95 J 0 ,. 5 0 0 0 Ü .7000 • 0 .9.000 1 .1000 01 EPROP 0.7565 0.71*93 .0.71*50, 0.7517' 0.71(81 0.71*10 0.7372. • WQ El! EIIEL JQ 0.CÜ27 0.6006 0.5991* 0.5730 0.5900 0.S¿62 0.5821* 0.72730.7269 0.7297 ' ' 0.7292 0.731i( 0.7309 0.7280 co .WT 0.31*70 • 0.31*18 0.331*0 : 0.3311 ' 0.3237 0.3191* 0.3191 1.21*75 1.2328' 1.2137 1.2028 1.2078 1.1933 1.1885 •' ' . 0.3507 0.31*92 0.3l(G5 0.3881 0.3551 0.3570 0.3GÜ7 JT 0.7231 0.718G 0.7160 , 0.6670 0.6975 0.6901» 0.6836 - DF(KG) 0.1651* 0.17G0 0.1865 0.1976 0.2093 .0.2131* 0.2176 MODELO 4 2 6 8 S E R I E 6 0 ENSAYO DE AUTOPROPULSION ENSAYO ri 1*0 MODELO N FRICCIÓN ATTC 19U7 DATOS V I S C O S I D A D C I N E I ' A T I C A DEL AGUA DEL C A N A L - O . U UOOOl U Ü 3 f t 2 / S V I S C O S I D A D C I N E M Á T I C A DEL AGUA DEL r'.AR—- O . 0 0 0 0 0 1 1 8 8 l ' ; 2 / S DIÁMETRO DEL PROPULSOR DEL Í'.ODELO 0.138 M SUPnnF IC I E MOJADA DEL l'ODCLO .2.0514 M2 HUMERO DE EJES DEL RUQUE 1 DENSIDAD DEL AGUA DEL C A f l A L - - 1 0 1 . 7 8 K n S 2 / M i » DENSIDAD DEL AGUA DF.L MAR l O U . fiOKO S2/M14 ESCALAR1».00 ESLORA D a M.ODELO •-2 . 3 5M SUPLEI1ENT0 POR RUGOSIDAD -0.000250 FACTOR DE FORIIA 1.000 VM ' ' M/S 0.900 0.932 0.961» 0.996 1.028 1.060 1.093 1.125 1.157' 1.189 . 1.221 NO RT KG 0.1)67 0 . LOO 0.539 0.58U 0.618 0.661 0.712 0.77Ü 0.835 0.913 1 .Oüü I4O7.OOO 1*22.000 1*39.000 1*56.000 1*71.000 1*88.000 505.000 525.000 51*5.000 566.000 590.000 KG*M O .008 51* 0.UO91Ü 0.00975 0.U1Ü50 0.U1120, 0.U120Ü 0.Ü13UÜ o.üim7 0.01550 0.01716 0.01910 0.1(29 O 1*51 O 1*89 O 522 O S61 o 609 o 563 O 725 o 200 0.3ÜÜ KO KT DFO nO TO KG 0.388 ICO 0.171* O 185 ü 196 O 207 O 218 O 2 29 O 21*0 O 251* o :'65 o 278 0.290 0,.01*98 0,. 0 it 5 ü 0.. 0 3 9 8 0., 0 2 8 1 3 3 60 3000 2590 1700 OÍ R rbULTADOS VS NUDOS-: 11*.008 II*.507 15.008 15.508 16.009 16.508 17.009 1 7 . S09 18.010 1 8 . 5 09 19.011 SUCC 0.2l»l»8 b.2ü57 0.2391» 0.2372 0.2337 0.2299 0.221(9 0.2217 0.2137 0.2062 0.2022 NM 392.671* 1*00.826 1*23.629 1*1*0.008 1*51*.220 1*70.I|5i* 1*36.700 506.928 520.222 51*7.159 5 70.739 ETAR 0.9987 0328 0181» 02l»8 0255 0287 0278 021*6 0209 0121 0063 OM KG*M 0.00766 0.00813 0.008 7 3 0.0091*0 O.Olüül 0.01071 0.01161 0.01271* 0.0139 i 0.01553 • 0.01736 ,EH 1.2407 231*8 21*02 21*26 21*81 21*95 2670 2633 2866 3137 3320 Til KG 0.3U1» 0.381 O.UOO 0.1*31» 0.1(63 U97 539 591 61*8 719 0.803 FMFL 6,rini 0. 0. 58 9 9 6001» 5987 5987 59 8 5 S93I» 58 97 5838 5737 O O 0 . 5630 EPRCP 0.71(36 .7521» ,7585 ,7G2l( ,766l( 7693 7729 ,7661» 7669 ,7629 0 . 7 51(8 l.'O va 0 . 3 9 21 ,3855 ,37 57 , 3 7 12 ,3706 ,366U ,3712 ,3708 ,3753 ,3875 0 . 3 9 65 0.3913 1(05 3 38 58 3 8 51 3860 3837 3883 3863 38 8 9. 3958 0.1»Ü11 JO ,6024 , 6087 ,611» I* ,6156 ,6161 ,6176 ,5101» 6036 Í939 .5755 ,55 81» 0 .3000 0 .1*000 0,. 5 0 0 0 0,, 7 0 0 0 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. JT 6031 58 9 0 6U35 6010 6011 6007 Í9 38 Ui87 ISlü 5677 Í5l»l DF(KG) 0,2067 0 . 2 202 2 31»! 21(83 2630 2780 2935 30 92 3251» 31*19 3589 PETROLERO DE 150 000 TPM tNSAYO DE AUTOPROPULSIOri -ENSAYO N -15 MODELO N FRICCIÓN ITTC 1957 DATOS DENSIDAD DEL AGUA DEL CANAL--101.87KGS2/MI» DENSIDAD DEL AGUA DEL MAU - I Q i » . 61KGS2/MI* ESCALA 10 0.00 ESLORA DEL MODELO 2.72M SUPLEMENTO POR RUGOSIDAD 0.000163 FACTOR DE FORMA 1.173 VM M/S NO 0.703 0.731» 0.759 0.800 0.809 0.823 0.853 0.885 989.200 lOijfi.OOO 10U6.000 1116.000 1127.000 111*6.000 1183.000 1216.000 RT KG 0.21»0 0.258 0.275 0.30l( 0.311 0.322 0.31(5 0.371 VISCOSIDAD CINEMÁTICA DEL AGUA DEL CANAL- O ..00000.11i*5M2/S VISCOSIDAD CINEMÁTICA DEL AGUA DEL MAR O.ÜÜ0001188M2/S DIÁMETRO DEL PROPULSOR DEL MODELO 0.072 M SUPERFICI E MOJADA DEL MODELO-- — :- 1.867 M2 NUMERO DE EJES DEL BUQUE 1 no TO KG 0.127 0.162 0.162 0.18 0 0.186 0.18 9 0.193 0.211 KG*M O.Ü'0115 0.00133 0.00131* 0.0011(3 O.OOIUU 0.0011(8 0.00155 0.00169 DFO KG O.IUU 0.157 167 182 ISU 188 201 0.215 KT m 0.0261 0.022l( n.0186 0.Ü137 0.1870 0.1500 0.1100 0.0 68 0 0.2000 0.3000 0.1(000 Ü.5U00 en OÍ RESULTADOS VS NUDOS 13.676 li(.290 li(.771 15.561 15.71(9 16.008 16.592 17.230 SUCC .2501 .3705 .3333 .3222 .320i( 0.^295 2 0.2727 0.2657 NM 988.213 101(9.795 1052.662 1119.553 1126.008 111(1.107 1178.298 1214.565 ETAR 1.1739 2395 2286 2973 3322 3259 3362 2963 QM KG*M O.UOllU 0.ü013l( 0.00135 0.0011(1* 0.0011*3 0.0011*6 0.00153 0.00108 EH 1 .6680 1 .7857 1 .971*6 1 .8669 1 .9371 1 ,9253 1 .9197 2.0065 TM KG 0.127 0.153 0.161* 0.181 0.185 0.187 0.196 0.210 EH.EL 0.2881* 0.2289 0.2285 0.21(01 0.2336 0.21*31 0.2507 0.21*61 EPROP 0 . 551*8 0.5 071 0.551*5 0.5815 0.6029' 0.6207 0.61*31 0.61*02 JQ 3565 3365 3313 3573 3752 0.3796 0.3880 0.3712 WT WQ 0.3918 0.1*166 0.1*1*25 0.37 62 0.3668 0.3611* 0.31*96 0.3823 0.5501* 0.6510 0.6623 0.6369 0.6U91 0.6339 0.6211 0.631*0 JT 0.2635 0.2012 0.2007 2137 2079 2175 2260 2199 DF(KG) 0.11*1*5 O .1551 0.1653 0.1810 0.181*8 0.1901 0.2021* 0.2151 PETROLERO DE 1 5 0 000 TPM RNSAYO DE AUTOPROPULSI O» niSAYO N 31 MÜDELO ti FRICCIOfI ITTC 15 1957 DATOS n r n S i n A n D E L AGUA D E L CAtlAL--101.8GKr.S2/Ml) DEtJSIDAD DEL AGUA DEL CAR 1 0 1 * . 61i;GS2/t1l( F:"CALA r,5.0U fSLORA DEL f'ODELO it.lSIl SIJPLEIIEtlTO POR RUGOSIDAD -0.000030 FACTOR DE FORflA 1.150 ,• Vil ÍVS tlO • RT KG 0.893 0.925 n.957 0.989 1.020 1.052 1.081* 717.000 752.000 787.000 822.000 857.UOÜ •'892.000 927.000 V I S C n S i n A D C I N E t l A T I C A DEL AGUA nCL C A t l A L - 0 . 0 0 0 0 0 1 1 1 8 t 1 2 / S V I S C O S I D A D C I I I B ' . A T I C A DEL AGUA DEL tlAR O . 0 0 0 0 0 1 1 8 8112/S n i A t ' E T R n DEL PROPULSOR DEL tlODELO 0.112 M S U P E R F I C I E flOJADA DEL fíODELO l(.ltl*9 112 tlUI'ERO DE EJES DEL RUQUE 1 . TO KG 0.9Ü2 0.957 1.013 1.073 1.137 1.2ÜG 1.286 0.1*62 0.501* O . 5U8 0.593 0.G1*2 0.703 Ü.767 00 i;G*t1 DFO KG 0.00667 0.00707 0.0071*9 0.Ü0795 0.0081*8 0.00915 0.01002 . 0.1(95 0.522 0.550 0.531 0.611* 0.51*3 0.683 KT ICO 0.2200 0.1770 0.1350 0.0920 0.0253 0.0220 0.0183 0.011*5 J 0.2000 0.3000 0.1*000 0.5000 en O) RESULTADOS VS fWnOS 1U.009 11*. 509 15.010 15.510 16.010 16.511 17.011 SUCC 0.1190 0.13G9 0.1551 0.1703 0.1353 Ü.20G2 0.2138 tll-1 735.919 768.1*95 Pül.jitl 835.691 8 70.81*0 906.138 91*1.3U5 ETAR 0.92G9 0.9535 0.9791* I.ÜOOG 1.0168 1.0279 1.0201* . Olt l',G*M 0.00705 0.0071*2 0.00780 0.00826 0.003 8 0 0.0091(9 0.01038 El! 2.1*293 2.311*7 2.2102 2.1153 2.01*22 2.0105 • 2.0123 Til IX 0.1*92 0.531 0.573 0.618 0.668 0.731 0.796 EIIEL 0.3165 0.3222 0.3269 0.3313 0.3333 0.3281 0.3232 EPROP 0.7128 0.7113 Ó.7078 n.7UlG 0 . 6 9 22 0.6781 0.6637 UQ 0.731*0 0.681*9 0.61*19 .0.C071 0.5825 0.571*2 0.5859 JQ 0.1725 0.2032 0.2291 0.21*91 0.2622 0.261*9 0.2556 ViT 0.6373 0.G271 0.6177 0.G078 0.6010 0.6052 0.C093 .IT 0.2358 0.21*05 0.21*1*6 0.2U86 0.2505 0.21*57 0.2411 DF(KG1 0.1*679 0.1*978 0.5285 0.5601 0.5921* 0.6255 0.6591* 57 MODELOS DEL"VICTORY" ^ X=48 X = 24 1.3 1.2 1.1 \ 10 _ 0.&- 0.7 - \ 0.60.4 WT 0.3 0.2 15 14 V(nudos) .Fig.28 16 - . 58 - MODELOS DE CB = 0 . 7 5 DE LA 5 E R I E - 6 0 X =64 X = 30 1.3 - 1.2 % 1.1 1.0 ^r 0.8 - n, 0.7 0.6 0.4 W, a3 - 0.2 - -i W 1 1 15 16 1 n V (nudos) Fig.29 1 1 16 19 1- - 59 - MODECOS DE PETROLERO DE 150 000 TPM 2.5 T) 2.0 1.5 1.3 \ ' • ' 0.9|0.8 0.6 0.5- 0.3 0.6 WT OÁ - 0.3 0.1 - 14 _| 15 416 V(nudos) Fig.30 17 - 60 ción en el dinamómetro y en el eje. Si a és.to añadimos que^ los dinamómetros de medida empleados en los. ensayos cuyos resultados tratamos de comparar, son distint.os, por pertenecer a centros^ -de investigación., diferentes, podemos concluir que tanto los valores- de 1 coeficiente rotativo relativo de los modelos pequeños como de , los grandes no •ofre_. cen la necesaria confianza para ser considerados en el presente t-ra-. bajo. Todos los autores coinciden en considerar este coeficiente exen, to del efecto de escala, por lo que conviene admitir este criterio hasta tanto no se disponga de datos procedentes de futuros análisis de pruebas, de los cuales se pueda deducir r\ . En conclusión, puede decirse que, una vez estudiada la influencia de la viscosidad en la resistencia de remolque de una carena y en el funcionamiento del propulsor en aguas libres, el problema de la correlación modelo-búque queda reducido al estudio del efecto de es cala en los coeficientes de estela y succión. Esto es lo que se va a tratar a continuación, 4,2. Efecto de escala en la estela. • Se ha definido en el apartado anterior lo que se entiende por estela nominal y estela efectiva.Conviene hacer alguna otra consi deración sobre su naturaleza, La estela nominal puede definirse . • como el campo de veloci- dades relativas al disco de. la hélice, originado por la carena 'con' elpropulsor inactivo. Para abordar su estudio suele considerarse la es- tela como constituida por tres componentes; estela potencial, estela de bida a las olas creadas por la propia carena y estela viscosa» Natural mente, esta clasificación es tan artificial como la descomposición de la resistencia al avance en sus di.versas componentes, pero es indispensable partir de esta descomposición de causas mientras no se con siga la resolución teórica de. las ecuaciones que rigen el moyimiento de fluidos viscosos. La estela potencial sería la originada por la carena sitúa da en un flujo uniforme de agua sin viscosidad y sin estar sometida a la acción de la gravedad. Como es sabido, en este -caso .ideal la ve locidad en el perfil del codaste sería nula, aumentando suavemente hacia popa en el plano de crujía y con un mayor gradiente .-en diré cción transversal. Según ésto, dada la colocación nprmal.de .los buques de una hélice ( o si. el numero de ejes es impar, en la. hélice central) la estela potencial está constituida por velocidades inferiores a la del flujo en el infinito (velocidad de avance del buque) en la mayor - 61 parte de los puntos del disco. Su estudio teórico no está aun totalmente resuelto,, si bien se han conseguido soluciones aproximadas b_a sadas en la distribución de manantiales y sumideros sobre la super- ficie de la carena para conseguir un flujo equivalente. Pero como puede suponerse, la consecución de estas soluciones impone una elaboración complicada, debido al gran numero de ecuaciones que es pre^ ciso resolver para llegar a definir la distribi:;cion de singularidades definidoras del flujo. • Es importante resaltar que, si bien la estela potencial depende de la velocidad del.buque V, el coeficiente de estela defini_ do como V- V w = P E— (4.12) V depende solo de las formas de la carena, ya que en un flujo .potencial estacionario alrededor de un cuerpo sumergido la velocidad en cualquier punto está definida por un factor, determinado por. su posición, que multiplica a la velocidad en el infinito. Puesto que en este trabajo se pretende estudiar el efecto de escala inherente a la experimentación con modelos, no es preciso . que entremos en el desarrollo teórico de la estela potencial ya que este ideal valor e s , según se ha explicado, igual para el buque que para su modelo. Si se tiene' en cuenta la acción del campO' gravitatorio por la existencia de una superficie libre, se alteran las condiciones límites de,l flujo, pasando de (V ) _^ =0' a Cp ) _•„ = 0 , lo- que da luZZ*"'»' ZZ~''J gar a la formaciSn de olas con la consiguiente alteración del campo de velocidades en el disco. Esta variación de la velocidad potencial en el disco V es la denominada estela de formación de olas, que en aw la mayoría de los buques mercantes es una pequeña fracción de la es- tela total. Para comprobar la pequeña importancia de la estela debida a las olas originadas por la carena, supongamos un buque de 120 metros con un calado de 7 y un propulsor de 5 metros de diámetro, que avanza a una velocidad de 15 nudos. El N° de Froude es en este caso 0.22 y para este valor.puede admitirse que la altura de la ola creada por el buque sobre la vertical de la hélice es d e l o r d e n de 0,5% de la eslora. Si admitimos que el campo de velocidades inducidas, por las olas es parecido al producido por una ola trocoidal, la componente axial de la velocidad en un- punto del disco situado a una profundidad - 62 z viene d e f i n i d o por la expresión: V (4.13) V' V donde ?, es la altura de .la ola en la vertical del punto en consideración y V la velocidad de propagación de las olas. En nuestro caso esta velocidad coincide con la del buque por tratarse del tren de olas estacionarias que éste origina. Dada la variación exponencial de la velocidad con la profundidad, el efecto de la formación de olas en la estela no solo consiste en variar su valor medio sino tarn bien en modificar su distribución en sentido vertical. El valor medio de la velocidad inducida por las olas integrando la expresión (4,13)j a la superficie del disco y dividiendo por su área, es para el caso particular propuesto de 0,40 m / s , lo que supone una variación del 5,5% sobre la velocidad de avance del buque. Hay que añadir que la clásica descomposición de la estela nominal en potencial, de olas y viscosa, no es la más adecuada para el objeto que aquí se persigue, ya que tanto la estela potencial co^ mo la debida a las olas corresponde a un flujo no viscoso, por lo que pueden ser agrupadas en un único concepto y una sola denominación En adelante, por estela potencial se entenderá la.originada por una carena que se mueve en un fluido ideal no viscoso con superficie libre... Conviene recordar que la formación de olas de un buque y de su modelo no son exactamente semejantes, debido a"la influencia de'l N° de Reynolds, según se explicó en' el capítulo 2. Esto significa que no existe una semejanza total entre la estela debida a las olas en el modelo y el buque. Ahora bien, dado q,ue este efecto es pequeño y que la aportación de las olas a la estela total es también pequeña, según acabamos, de ver,, puede admitirse sin reparos la ausencia de efectos de escala en la estela, potencial .últimamente definida, 'Finalmente se denomina cátela viscosa a"la variación de la estela potencial originada por la viscosidad del agua, es decir, • que siendo V l a v e l o c i d a d del flujo en el infinito, V , la veloci- dad en un punto del disco de la hélice suponiendo el agua no viscosa, y V la velocidad real en este mismo punto, una vez descontado el efecto de la viscosidad, (ver fig,31) el coeficiente de estela sa se define del siguiente modo. V -V w =• V C4.14) visc£ - 63 Fig.31 Esta aparentemente extraña niencia práctica de que el los coeficientes de estela de la ecuación (if,12) y de V-V V -V w +w = — — £ . + ^ P V V u definición viene obligada por la convecoeficiente de estela total sea suma de potencial y viscosa. En efecto, la suma la (»+. m ) es V-V = w (4.15) Según esta definición cabe hablar tanto de estela poten . cial como de estela viscosa dentro y fuera de la capa límite de la carena. Esto se explica porque en el interior de la capa límite, ia viscosidad hace disminuir la velocidad que habría si el fluido fuera potencial. Y en el exterior , a,unque el flujo pueda considepa^r se potencial, las velocidades no son exactamente las mismas que en fluido no viscoso debido a que la capa límite equivale a un ensanchamiento de las formas de popa, y en consecuencia modifica el flujo potencial. El proceso a seguir para calcular la estela nominal di una carena debe ser, en consecuencia, el siguiente: Se supone en pr.incipio que el buque se mueve en un fluido ideal y calculando el fija jo potencial a su alradedoi?, se obtiene el campo de presiones sobre toda la superficie de la carena. Seguidamente se integran las ecuaciones de la capa límite teniendo en cuenta los datos anteriores, se aumenta el volumen de la carena en una cantidad equivalente al espesor de desplazamiento de la capa límite en cada punto de la superficie, y con la carena resultante se vuelve a comenzar el proceso. Es decir, que el cálculo de la estela real debe hacerse por ite^-" ' f raciones sucesivas. Normalmente, a la segunda iteración se debe obtener un resultado bastante aproximado» Ahora bien, a las dificultades de tipo - 64 práctico que se presentan en el cálculo del flujp potencialj hay que añadir los problemas teóricos relativos al cálculo de la capa límite tridimensional. Este último problema se plantea en los siguientes tér minos: La expresión de las ecuaciones de Navier-Stokes, que determinan el movimiento de un fluido viscoso imcomprensible en un espacio tridimensional. ¿I = grad p+y V (4,15) V dt es de una enorme dificultad matemática, y solo se ha conseguido en casos muy especiales. Por lo cu^l, la mayor parte de los trabajos s£ bre capa límite se dirigen a convertir, mediante determinadas simpli^ ficaciones, el problema tridimensional en bidímensional. En estas con_ diciones la ecuación vectorial (4.16) se transforma en las ecuaciones analíticas; 8u 9u 9u 9.x 9v 9t 9v 9x •r—• + u -r— + 9v 9y V -5— ^-If-^ 9 u^9 u 9x2- 3y 2 2 1 9 V 9 y (4.17) y la ecuación de continuidad 9u 9x 9v (4.18) Si se trata de un régimen permanente desaparecerán las deri vadas respecto del tiempo., y teniendo en cuenta además que el espesor de la capa límite encontrado para soluciones sencillas es proporcional a / V y de magnitud despreciable frente a la longitud del cuerpo bi dimensional en estudio, pueden suponerse despreciables {62} algunos de los términos de las ecuaciones .(4.17). Entonces se obtienen las ecuaciones de Prandtl para la capa límite 9u 9u u -— + V -r— 9X 9y 9y dx 92u 9y (4.19) 9u +. •9v 9x , 9y En las que además de las simplificaciones anteriores se ha supuesto que no actúan fuerzas por unidad de masa, tales como las debidas a la gravedad (X = Y = 0 ) . . - 65 Si la curvatura de la superficie es . .pequeña se puede' "definir el eje X a lo largo de la superficie del s olido, y^-el. eje Y normal- a ella. Con esta', ;iiiue!íj^a'hipótesis las condiciones en los límite s,;-.:p;a,r a-;-' la resolución de' (4,, 19)' son .. ' para y = O , v=0 (M-.20) u=V p a r a , y ' ,= , ó , donde V ( x ) es la (x) P velocidad P del fludo ^ . potencial exterior l a capa l í m i t e . E s t a v e l o c i d a d y la p r e s i ó n e s t á n r e l a c i o n a d a s por e c u a c i ó n de B e r n o u i l l i , que f u e r a de. l a c a p a l i m i t e e s ' a p l i c a b l e : ' . p + i. pv^ = c t e . a ^ •-: • la (4.21) Si se i n t e g r a : l a s do.s • e cuaci.ones ( 4^„ 19 ) c o n re l a c i o n a y , d e s d e y = 0 a y = ó , se obtiene:, • ' r« 9 u U , 3 u, + V... -:r ^. T; J d V í p dx 3u 8y gy = -V (4.22) ry 9 . ü 3 X J o dy ) Sustituyendo este valor de v en la primera ecuación y teniendo en cuenta que el esfuerzo tangen cial\@;n y(3 u/3 y) la pared x es precisamente resulta, 3 u I' 3 ü 3u 3x dy -V . 3 y •' o :;dV - -I dy: p dx (4. 23) O e integrando la ecuación (4.23) se transforma én dV dx u-(V -u) dy + • P dx r (V -u) dy = P O (4.24) Puesto que fuera de la capa límite el valor de estas integrales es -'prácticamente nulo, el límite superior- de integración-puede aumentar- se a infinito, y teniendo en cuenta las conocidas .definiciones de los espesores de desplazamieñ t,o- y'de'"'can'tidkd'dé movimiento.-,. - '• 55 ó" p ) (V -u) dy P O .. •• (4.25) u (V -u)dy V P • P ; O ia ecuación (4,24) queda de la siguiente manera: 'd(V-.6) ^—E dx dV (4.26) + 6. dx Más corriente es sustituir el espesor de desplazamiento 6 por el llamado parámetro de forma H=6 / 0 , y dado que 6 no es función de y, (4.26) queda en la forma: 4 9 dx d. V TO (4.27) (2+H) dx P V' Esta es ya una ecuación diferencial de primer orden de solu cion sencilla siempre que sean conocidos los valores de los nuevos pa rámetros introducidos y el flujo potencial fuera de la capa límite. Lo mismo T Q que 6 y H dependen, de acuerdo con su definición, de la distribución normal de velocidades en el interior de la capa limiitejy las relaciones entre elíos,necesarias para la resolución de ( 4 . 2 7 ) , han de ser .determinadas por métodos experimentales, . Los trabajos dirigidos a estudiar la'capa límite de formas, de buque, {69},. { 7 1 } , { 7 2 } , se inclinan a simplificar el carácter de la capa límite de la siguiente menera: El flujo potencial calculado suponiendo el fluido no viscoso define las líneas de corriente y la variación de la velocidad potencial V en todos sus puntos. Entonces es posible integrar la ec.(4.27), correspondiente a una capa límite ... bidimensional, a lo largo de cada linea de corriente* Este es el pri mer paso del proceso de iteraciones explicado anteriormente. Como puede apreciars.e, el procedimiento és muy complejo y arrastra tras de sf, además de la probable inexactitud del cálculo del flujo potencial, los errores inherentes,a las sucesivas simplificaciones que conducen de las ec.(4.16)^a la ecuación ( 4 . 2 7 ) , a las que es preciso añadir los correspondientes á la estimación de los parámetros de la capa límite y a su aplicabilidad a "un caso tridimensional. Debido a estos inconvenientes, y dada la finalidad de este trabajo, parece razonable simplificar el problema de la estimación de - 67 - . •• la estela viscosa, de la cual, solo interesa aquí el valor medio. Es más, ni siquiera^.es-.preciso conocer el'valor absoluto, sino, que basta ría con determinar la diferencia entre los valores absolutos de la estela viscosa del modelo y del buque. Según ésto un ligero error en la estimación de estos valores debido a las hipótesis de partida irá dirigido en el mismo sentido en el modelo y' en el buque real, por lo que el error en el efecto de escala será aún menor. En consecuencia, vamos a suponer que el valor medio de la estela viscosa nominal en el disco del propulsor de un buque de una sola hélice coincida con el valor medio de la estela producida por un cilindro recto de generatriz vertical de altura infinita, y cuyo pía no de simetría coincida con el de crujía del buque, figk32. No inte ^ ••• Fig.-32' re's'a'''cual sea la forma del perfil de este cilindro pues como ya se há visto, la integración de la e cuacion (1+. 27) se efectúa a lo largo de una linea,-"despre ciando cualquie r 'curvat ura. La influencia de la' forma, se • tiene • en cuenta por la función V di-Éiiones en los límites para la ( x ) , es decir, en las con_ integración de la capa límite, q u e " vienen impuestas- por el gradiente de presión a lo largo de ella. Conviene, por lo tanto, que la distribución de presiones que se haya de aplicar a esta integración sea lo mas parecida a la dis_ tribución media en cada sección entre la proa y la popa del buque real. En este sentido parece adecuado sustituir cada sección trans_ versal del buque por un semicírculo de igual área y con el diáme- tro situado en lá flotación, ver fig.33. Según esta. hipótesis , la función V Cx) que permitirá integrar (14.27) es la correspondiente a - 68 ~ Fig. un c u e r p o de r e v o l u c i ó n doble la que d e l buque en el para''integrar flujo el coeficiente ha confeccionado potencial la ecuación mite' bidimens i o n a l .potencial cuya curva de á r e a s es él., en c o n s i . d e r a c i ó n . R. G u t i é r r e z ra-calcular flujo 33 de { 7 4 } , y ha de e s t e l a en de c u e r p o s la cantidad aplicado nominal de las la AICN un p r o g r a m a . pa_ - de r e v o l u c i ó n , de m o v i m i e n t o los dos formas de programas de {73} y la para la s e r i e otro capai ií_ estimar -5 0 . 'En este reproducen los resultados obtenidos para el coeficiente ,1/3 de es te la vis eos a en función de los coeficientes C ,L/V '" y numero trabajo..se • . . . . P . de Reynolds, fig. 34 , así como la corrección necesaria en función de la relación D/L para tener en cuenta el tamaño relativo del propulsor, fig.35. En estos resultados la posición del centro de carena es la óptima de acuerdo con la serie 6 0 , pero la influencia de esta posición en ía estela puede también tenerse en cuenta con este procedimiento. En cambio no se puede estimar la posible influencia de la relación manga/calado , como se desprende de la naturaleza del método de aproximación descrito. Los citados gráficos de las figuras .34 y 35 permiten,' en consecuencia, estimar los coeficientes de estela.de fricción nominal de unas formas dadas a distintos números de Reynolds, o sea conocer el,efecto de escala en el coeficiente, de estela nominal, habida cuen ta de que la estela potencial permane ce. invariable. Conviene recordar que no es la determinación de la estela nominal lo que se persigue aquí, sino el efecto de: escala en la estela efectiva, por lo que vamos a tratar sobre la relación que existe entre amb as . Supongamos que queremos medir la . distribución de velocidaíde - 69 en el disco de la hélice(estela nominal) con un molinete de diámetro muy pequeño, casi puntual, para lo cual lo colocamos sucesivamente en puntos distribuidos por todo' el disco. El funcionamiento-,'del molinete en cada punto altera ligeramente el fluido a isu alrededor en un peque_ ño entorno, pero no influye sensiblemente sobre el conjunto de la es_ tela. Para obtener la distribución de velocidades buscada basta con realizar un tarado del molinete en un flujo ' uniforme de velocidad conocida, y si se quiere obtener la velocidad media de la. estela, se integra a todo el disco y se halla él valor medio. Pues bien, este proceso es en cierto modo el que se' sigue para determinar la estela que llamamos e fe cti va., con el ensayo de autopropulsion , con la diferencia de que en este caso el propulsor es a la vez molinete e integrador, y su tarado se efectúa mediante el ensayo de propulv sor aislado, Pero existe otra notable diferencia: este-"aparato de medida" modifica sensiblemente el campo de presiones en la popa de la carena ya que supone la adición de un campo de sumideros hidrodi_ námicos en esta zona, que acelera el flujo en popa y en consecuencia modifica la estela, Veámoslo ahora desde otro punto de vista. Supongamos la carena sustituída • por una distribución de manantiales y sumideros sobre su superficie de intensidad q. tales que dan lugar a un flujo equiva lente al de la carena sin propulsoro•La velocidad en ün punto cualquie ra es ../ ( _ q . r ds (,4. 30) 4. TT r ) donde r es el vector determinado por el punto en cuestión y otro punto cualquiera de la superficie s de la carena. Una vez el propulsor' en f uncionamient o ,'• éste puede- igualmente, sustituirse por una distribución de sumideros que por su proximidad a 'la carena modifican su forma. Para recuperarla es preciso añadir una nueva distribución•de manantiales óq. en la carena, de modo que -la velocidad inducida por la caren.a en un punto cualquiera, es ahora ; (q^ + 'Sqi) rds . UTT ( 4. 31) 3. r La distribución de velocidades v' en el disco es la que cons, . . , a .. . •:.;, - • tituye la verdadera estela de la carena con hélice en funcionamiento y 70 cuyo valor medio v' será más próximo al valor V(l-w ) , donde w es la estela efectiva, que el valor deducido de la estela nominal. Conviene aclarar que v' • a no es- aun la velocidad total del . agua relativa al disco, sino que para obtenerla habría que añadirle el valor de la velocidad • inducida u por la distribución de sumide a — •. ros sustitutivos del propulsor. En resumen, el coeficiente de estela nominal puede expresa£ se de la siguiente manera: w (^.32) 1 - donde A es el área del disco. El coeficiente de estela efectiva és o • del orden de v'dA w. (4.33) 1 V La diferencia entre estas ecuaciones es w - w„ . n T r f^a I s q. "— ds . dA (4,34) M-ir. r A JA J s Si suponemos que ^ ^i . es independiente del n° de Reynolds, de (4,34) se deduce que la diferencia entre los coeficientes de este_ la nominal y efectiva no varia con la escala y, en consecuencia, que el'efecto de escala en la estela.efectiva es el mismo que el que se produce i-en la estela nominal, e igual, por tanto, al de la estela nominal de fricción. Este último es el que, como hemos visto, puede estimarse de los gráficos 34 y 35. Se ha aplicado este método para corregir los coeficientes de estela efectiva obtenidos de los ensayos de los modelos pequeños (3 metros) y se han comparado con los correspondientes a los modelos de doble tamaño, valores éstos que ya figuraban en los gráficos 28 a 30. Esta comparación se ha representado en la fig. 35, Los resultados son lo suficientemente esperanzadores como para admitir la posibili- dad de extrapolarlog . al buque. En cualquier caso este método puede constituir una aproximación provisional para las previsiones de pruebas - 71 - - a =0.06 w, 1- / Q= 0.0^ a= - a= 0.02 (logF^-2)' o.io - -^ b2- 0,30 - 6D^ Variación déla estela de fricción con Cp, L / V ^ y Rn 0.20 Resultados de los cc'iculos de A.i.C.N p a r a - — 6.r. - r ^ ' OJO MÍ.W- - — VG.C ' 1 050 0.60 0.80 o.:'o Fig.3 4 Wf Wf p a r a O l ' Q D A QD2 QD6 QCK Fíg. 35 D/L D/L=0.0 4 72 - MODELOS DE 'VICTORY' 0.35 A = 48 o: 30 h = 2A f 14 16 MODELOS DE Ca=0.75 DE LA SERlE-60 0.35Az6A W, A = 30 0.3015 U 0.6 |_ 16 18 17 20 19 MODELOS DE PETROLERO DE 150 000 X=65 0.5 AzIOO A = 40 O.A 13 U •+- 1- 15 .16 17 V(nudos) Fig.36 en tanto no se disponga de suficiente información Diocedente del análisis de pruebas realizados según se propone en el capítulo 6 de este trabaj o. . 4.3.. Efecto de escala en el coeficiente de succión. Como acaba^mos de explicar en el apartado anterior, el funcionamiento del propulsor a popa de la carena modifica el campo de presiones y, en consecuencia, el flujo hidrodinámico en esta zona del buque. El resultado es un aumento de la resistencia al avance, que se puede considerar como suma de dos efectos: a) un incremento de la resistencia de presión debido a que el campo de presiones en proa no se ve alterado y en cambio en popa disminuye sensiblemente con lo que la integral p ds.i extendida a toda la carena es en este caso mayor, b) un ligero aumento de la velocidad del flujo en el cuerpo de salida que incrementa la resistencia de fricción. Según ésto el coeficiente de'sücciSn se puede considerar como suma de dos componentes AR t = AR^ -=^.+ -J- t +t^ P f (4.35) - 73 - La mayor parte de los investigadores que han estudiado este tema coinciden ejná-a.dmitir que la aportación' de-1, e;fecto--.de' fricción al coeficiente de succión es una pequeña fr~acción. de su valor total {78}, lo cual parece fácil de comprender si. se considera que.el; au_ mentó de velocidad más importante afecta a una pequeña zona donde la componente longitTjdinal de los ' esfuerzos tangenciales es menor, i. y sobre todo, donde las velocidades son más bajas y, por lo tanto, el incremento de resistencia de fricción local es también menor^.^ • En cambio la componente longitudinal de las fuerzas normales origi_ nadas por la depresión en popa es máxima precisamente en esta zona. De todo lo anterior parece deducirse que el coeficiente de succión debiera ser poco sensible al efecto de escala puesto que la fracción t^, que depende del N° de Reynolds, es proporcionalmen^ te pequeña ( t / t puede ser del orden de 0.10,ref {78}).,,y de hecho así se supone en la extrapolación de resultados de ensayos del m£ délo al buque. Ahora bien, esto no es totalmente correcto, como veremos a continuación, Recordemos que según el teorema de Lagally, la fuerza con que se atraen dos manantiales de intensidades Q y Q viene dada por Q1Q2 (1+.36) 2 Uirr siendo r la distancia entre ello's. Teniendo en cuenta que la veloci_ F=p dad inducida en el punto 1 por el manantial 2 tiene por expresión (4.37) Urrr se. deduce que la fuerza ejercida por el manantial 2 sobre el 1 pue de también expresarse así •PQ,V^ siendo V (M-. 38) la velocidad que tendría el flujo en'l si no existiese el manantial O ^ ,. 1 Evidentemente esta fuerza es igual y de sentido contrario que la fuerza inducida por el manantial 1 sobre el 2, pQ Si sust,it.,aimos la carena por una , distribución V , de manant ia.les y sumideros de intensidad específica variable q „ , como hicimos en el apartado anterior, y el propulsor, por una distribución de sumideros de intensidad por unidad de superficie q , la fuerza con que éste atrae a la carena ha de ser - y.H - U2 q2 ds F-.. (4,3C) 1 üonae u_.es la velocidad inducida por la distribución de sumideros que sustituyen al propulsor,. en un punto de la superficie de la ca_ rena, cuando los manantiales y sumideros que la definen no actúan (es decir, retirada la carena). Este procedimiento ha sido empleado {77} por algunos autores para calcular el efecto de succión de la hélice sobre la carena. Aho_ ra bien, según acabamos de ver, esta fuerza es igual pero de sentido contrario a la inducida por los manantiales distribuidos en la superficie de la carena sobre el propulsor: F .= O ^p- --1 dA (4.ÍI0) donde u , .. I - O J > J - J T ^ • -, p' es la velocidad inducida por los manantiales q en un pun_ to del disco sin la hélice, y A el área del disco. Pero u ,= V w; ,, , o P . B* siendo ^ , el coeficiente de estela potencial de la carena engrosada en una cantidad equivalente al espesor de desplazamiento de la ca pa lÍHÍte. . (Conviene distinguir Hf, de «í , estela potencial defini- da en 4.2). La expresión (H,40) ha sido ya utilizada, {78}, para estimar el coeficiente de succión pues en r'^chos casos puede nestijltar más sencillo determinar u que u , así como q , que es concre- tamente el doble de la velocidad axial inducida u por el propulsor en un punto del disco, {76} y {78}: Según ésto, la componente axial de la fuerza F. en la ecuación (4.40) puede escribirse. . F. = 2p (4.41) u , u dA P' a El coeficiente de succión, supuesto despreciable al aumento de la resistencia de fricción, es en este ca^o F t = ^ T = 12, u , u dA p» a T (4.42) y m u l t i p l i c a n d o e l numerador y e l denominador por V A 2pV^A a w - ^ '^ a /• H ^ (1-w^) dA • ^ - o resulta (4.43) - 75 Analizando esta expresión p.ugde observarse que aunque se c£_ loque una deducción de fricción adecuada en los. ensayos de auto- propulsión con eU.fiñJde que el empuje^ específico del própylspr'del modeló.sea igual al del buque, el coeficiente de Su'cción es necesa_ 2 riamente distinto. En efecto: en (M-.4-3), los términos T/2pV;A y dA /A son comunes al modelo y al buque; en primera aproximación tam^ bien lo sería w ,: en cambio, u /V variará en general con la escala p' a a debido a que, según hemos visto, w aumenta al disminuir el número de Reynolds, y en consecuencia el coeficiente de empuje (4.44) 1 2 2 - p V^(l-w„)^ A^ 2 ^ aumenta también, lo que origina que las velocidades inducidas u /V 3. a. sean proporcionalmente mayores. En definitiva, la variación del cpe^ ficiente de succión con la escala es función de la variación del producto de dos términos, (1-w ) y (u /V ) tales que el decrecimien T a a to del primero implica un incremento del segundo, de modo que 9t/9R podrá tener un valor positivo o negativo según predomine la variación 'de, uno u otro término con la escala. Por este motivo, t puede resultar prácticamente, constante en algunos casos, Pero tales resultados no autorizan a generalizar la invariabilidad del coeficiente de succión con la estela. La ecuación (4,43) va a permitir el establecimiento de una relación entre el coeficiente de succión y el coeficiente de estela efectiva, según se expone a continuación. El. empuje de la héli'ce puede expresarse de una manera elemen tal por ei teorema de la cantidad de movimiento, T = p (v' a + u ) 2u dA a a (4.45) o bien T= 2pV' V ' U •V V u dA * (4,46) U En esta expresión v' representa exactamente el valor de la velocidad dado por ecuación (4,31) ya explicado en aquel apartado. La expresión del coeficiente de succión (4.43) se transforma teniendo en cuenta (4.46) en 76 wp ' ° t V dA (4.47) •= V ' u U a a dA + a V u a dA " V V ' Si ahora consideramos U a y a los valores medios de VÍ' > ^-^ p ' "V •' V de forma que- wp ' , c —Tf V dA = w p', V ' U a (4. 48) dA (4.49) V a , . _ ~V • T a V " dA a T u u u (4.50) dA = y si tenemos además en cuenta que v /V es del orden de 1-w se v i o en e l a p a r t a d o 4 . 2 a l c o m e n t a r l a e c u a c i ó n d e l c o e f i c i e n t e de s u c c i ó n q u e d a f i n a l m e n t e a s í . l-w^+ - , según 1 3, (4.31), la expresión (4,51) Esta expresión es prácticamente igual a la presentada por R.Brard y M.Aucher en ref, { 5 9 } , y aunque difiere de ella en que , se_ gún aquel trabajo, el coeficiente de estela potencial que figura en el numerador es el originado por la carena con el propulsor en funcio namiento, mientras que, según el razonamiento seguido en esta tesi? w , es el valor medio del coeficiente de estela potencial nominal de P' la carena, es decir, sin hélice. La ecuación (4,51) representa una cómoda herramienta para determinar experimentalmente el coeficiente de estela potencial no- minal, de una carena aumentada en el espesor de desplazamiento de la capa límite, ya que t y w se obtienen del ensayo de autopropulsion del modelo, y u /V se puede aproximadamente calcular mediante la ecua ción (4.45) que teniendo en cuenta (4.49) y (4.50) se transforma en: - 77 - r . ..^ U T = pA V o 1-Wrj, + _a V 2u (1^.52) Se ha preparado un sencillo programa para realizar estos cálculos y se ha aplicado a los resultados de los ensayos de los cinco modelos patrón de la Serie 6 0 , con el fin de obtener los valores de w , de una serie sistemática con garantía experimental y comprobar su verosimilitud. Recordemos que w , es la suma de tres componentes: P , la estela potencial creada por la carena (supuesto el cuerpo sumergí^ d o ) , que solo depende de la forma; la estela de formación de olas, que depende además de F ; y la estela debida al ensanchamiento de la carena originada por la capa límite, que depende de las formas, de F y de R , Como las dos últimas componentes son pequeñas comparadas -con la primera, se debe esperar que los resultados de w ., que se obtengan para cada forma, representados en función de F estén en una linea ligeramente ondulante alrededor de un valor casi constante. En la fig. 3 7 ESTELA POTENCIAL DE LOS MODELOS BÁSICOS DE LA SERIE 60 CALCULADA SEGÚN w^z i[\-w^*\ij y) 0.2 r CB^O.SO • 0.2 * 0.1 LQJr = 0.75 CB -•01 -iO 2 Co=0.70 0.1 "-0.2^ . • . CB = 0.60 I I _L 0.15 . CB-0.65 rJO.I O.lL J_ J ± L X I 0.25 0.20 X X X 0.30 Fn • Fig.37 se han llevado los resultados obtenidos para los cinco modelos de' la Serie 6 0 , donde puede comprobarse la verificación de tales, previsiones . Naturalmente la mayor importancia práctica de la ec.(1.51) estriba en la hipótesis de que w , varié muy poco con el N° de Reyi>olds, ^a que en este caso se podría establecer para unas determinadas formas: 1-w^ + ^a ^ 'constante 0.53) En tal estela c a s o , una vez e s t i m a d o el efecto e f e c t i v a , el coeficiente e xpresión 78 - de succión vendría de escala en determinado la por la (4.53). Con el fin de culado e s t e ' v a l o r los tres buques presentado'en la con comprobar la h i p ó t e s i s w los r e s u l t a d o s e x p e r i m e n t a l e s que se están considerando en este , = c t e , se ha cal_ de los modelos capítulo,y de se han re_ fig.38, P E T R O L E R O DE 150 000 TPM 0.1 - .«É "^ X = 55 •'VICTORY' O.2I- w, 0.1 Mod. 4268 SERIE-60 0.2 i i ® L _L 8 f @ X = 64 0,1 J X = 30 A J L 0.15 _L 0.20 0.25 Fn Fig.38 donde se puede observar que, en efecto, w , adopta prácticamente el mis mo valor para las parejas de modelos semejantes del "Victory" y de la "Serie 6 0 " , así como para los dos modelos mayores del petrolero de 150.000 TPM (A=40 y A=65). En cambio los valores de w , correspondienP' tes al modelo más pequeño (X=100) de este petrolero difieren sensiblemente de los otros dos a velocidades bajas, pero convergen hacia éstos a medida que aumen.ta. la velocidad. Esto puede explicarse porque en el modelo pequeño el puntó de separación de la capa límite debe estar muy adelantado. Como consecuencia, el espesor de la capa límite debe ser considerablemente mayor y, por lo tanto, las formas "efectivas" de po pa (aumentadas en el espesor de la zona de remanso) dejan de ser se mejantes. Al aumentar la velocidad del modelo, y con ella el N° de Reynolds, el punto de separación se traslada hacia popa disminuyendo la zo_ na de flujo desprendido, con lo que aumenta la semejanza de la forma "efectiva" con los dos modelos de mayor tamaño. En resumen, puede decirse que, exceptuando los casos de - 79 modelos pequeños de formas llenas, el valor del coeficiente w , calculado con la ecuación (i+,51) a partir de de.t, w los datos experimentales y u /V^ puede considerarse, a efectos prácticos, independien te del h° de Reynolds . Y puesto que ésto se ha comprobado en una zona de valores de R correspondientes a modelos de tamaños compren n — didos entre 3 y 7 metros, zona en que los efectos de la viscosidad son más acentuados, es perfectamente admisible extrapolar la constan cia de w p', al buque, Por lo tanto, el coeficiente de succión de un buque se puede determinar mediante la ecuación (4.51+) t =t s m (u /V) se puede calcular de ec.(4-.52) entrando con el empuje T' del a s '^ s buque estimado directamente del ensayo de autopropulsión del modelo en primera aproximación. Una vez obtenido t de (^..S^) deberá cal Guiarse el verdadero valor del empuje del buque, que será 1-t T' s m (U.55) 1-t Debido al grado de aproximación que requiere el valor de (u./V) para resolver (4,53) no creemos necesario realizar iteracio a s — nes sucesivas con las ecuaciones (i4.52), (4.54) y (4,55) para deter_ minar el verdadero valor de t y, en consecuencia, el de T . 4.4,- Conclusiones del capítulo. Aparte de los resultados prácticos que se presentan en este capítulo para estimar el efecto de escala en los factores de propu_l sion, merece la pena destacar tres importantes conclusiones que se desprenden del estudio desarrollado: l.-La alteración producida por el propulsor en el flujo hidrodinámico alrededor de la carena, es en su mayor parte de carácter potencial, por lo que puede considerarse independiente del N° de Re^¿_ nolds. Ahora bien, como la determinación experimental del coeficien_ te de succión está sensiblemente influida por la estela, el valor de t, tal y como se ha definid^, varía con la escala en función de la variación del coeficiente de estela.2.-Aunque el efecto de escala en el rendimiento del propul-r sor aislado es algo máé importante, el valor de este rendimiento deducido de los ensayos de autopropulsión es también menor que el del buque a causa, igualmente, de la variación de la estela, por cuyo motivo trabaja con una carga específica muy superior. - 80 3.- Puesto que los usuales coeficientes de propulsión son una combinación de w , t y n , se deduce que el efecto de escala en todos ellos está determiando principalmente por la variación del coeficien_ te de estela con el N° de Reynolds. De aquí la importancia que es preciso dar al conocimiento de la estela real del buque, y para conseguirlo solamente se puede recurrir a la realización cuidadosa de pruebas de mar y a la aplicación de un adecuado tratamiento a los resultados obtenidos. Este es precisamente el objeto que se persigue en los dos últimos de este trabajo. capítulos 5.- OBTENCIÓN DE RESULTADOS EXPERIMENTALES Y EXTRAPOLACIÓN AL. BUQUE 5,1,- Zntroduccion La posibilidad de prever el comportamiento de un sistema cualquiera mediante la experimentación con modelos a una escala reducida, está supeditada a que se cumplan una serie de condiciones im_ puestas por las leyes de semejanza que rigen el comportamiento físico en estudio. Pues bien, como, por todo lo expuesto en los capítulos precedentes, las condiciones de trabajo del propulsor de cualquier modelo de tamaño usual distan mucho de ser semejantes a las del buque real, no parece procedente extrapolar al buque los resultados del par y las revoluciones obtenidas directamente del ensayo de autopropulsión , aunque sean corregidos por sendos factores de correlación ya que éstos pueden ser- considerados realmente como factores de ignorancia, La previsi-ón del comportamiento del buque en pruebas debe realizarse con aquéllos datos cuya obtención experimental ofrezca una mayor garantía, Estos datos son, a nuestro juicio, los siguientes: a ) , - La potencia de remolque de la carena lisa extrapolada por un procedimiento que tenga en cuenta el efecto tridimensional en la resistencia viscosa, (Ver capítulo 2 ) , b ) , " Las curvas características de funcionamiento del propul_ sor aislado, siempre que se hayan obtenido en condiciones supercríticas. Para lo cual, sería recomendable utilizar un modelo de propulsor de tamaño mayor que los normalmente empleados en los ensayos de autopropulsión. En cualquier caso, es conveniente corregir estos resultados por efecto de escala según se explica en el capítulo 3, c),- El coeficiente de succión obtenido de los ensayos de autopropulsión, extrapolado el buque como se indica en el apartado 4.3. Tienen una garantía relativa, ofrecida a título provisional, los siguientes datos: a ) , - El coeficiente de estela estimado mediante el método descrito en el apartado 4,2 b ) , - El coeficiente de corrección aditiva C para obtener la resistencia de remolque del buque real, dada en el capítulo 2, De todo lo anterior se deduce que el propulsor a empleSr en el ensayo de autopropulsión no debe tener por misión la medición di- recta de la potencia en el eje, ni de las revoluciones', sino de los 82 coeficientes de succión- y rotativo relativo, Servirá además como in_ tegrador.de la estela del mo.delo. En definitiva, se propone el siguiente método de previsión de resultados del buque en pruebas a partir de los ensayos con modelos de la carena y del propulsor, 5.2,- Ensayo de remolque El ensayo de remolque se ha de realizar en el margen de velocidades que interese en cada caso, pero además se correrá varias veces el modelo a baja velocidad (0,10<F <0,12) con el fin de deter- minar el factor de forma r. La linea de correlación será la ITTC-57 afectada por este factor de forma, Al coeficiente de resistencia obtenido para e.l buque de casco liso se le añadirá la corrección C y el coeficiente de resis a — •' tencia d.ebido al avance de la obra muerta en el aire en calma, Si no se conocen aún las características geométricas de la superestructura, se puede estimar esta resistencia como un 2% ó un 3% de la total. Es conveniente que la carena esté provista de los apéndices más importan_ tes. De no ser asi, es preciso añadir una corrección por apéndices. El coeficiente de resistencia total resultante definirá el "punto de autopropulsión del buque" en el que se ensayará el modelo autopropulsado. 5,3.- Ensayo de propulsor aislado Se ha de realizar un ensayo en aguas libres con el mismo pro pulsor que se utilice en el ensayo de autopropulsión, y a unas revolu_ ciones análogas, con el fin de obtener las curvas características K„^= =f.(J), K =f„(J) correspondientes a números de Reynolds parecidos. Esta precaución es necesaria porque lo que se pretende con este ensayo es obtener un tarado del propulsor para actuar como integrador de la estela del modelo y para determinar el coeficiente rotativo relativo, en el ensayo de autopropulsión, 5.4,- Ensayo de autopropulsión Se llevará a cabo con la deducción de fricción correspondien_ te al punto de autopropulsión del buque, definido en 5.2, y se tomarán las lecturas habituales de empuje, par y revoluciones. Con estos datos y los obtenidos del ensayo de propulsor aislado se determinan, por el método de identidad de empuje, los coefi-í cientes de estela w y rotativo relativo n Tm -^ . . • .. del modelo; y de las cur r vas de empuje y resistencia, el coeficiente de succión.. ^ — - 83 5.5,- Extrapolación de resultados al buque Se • és't-imará primeramente el efecto de escala- en el coeficien_ te de estela Aw , según se explica en el apartado 4»2,con lo que se determina el coeficiente de estela efectiva del buque w El coeficiente de succión del buque t s ~^TT>~'^^T' se estimará segQn . se indica en el apartado 4.3. Con lo que el empuje del buque resiilta 1-t ser m (5.1) m 1-t El resto del proceso se llevará a cabo sobre las curvas características de funcionamiento del propulsor en flujo uniforme obtenidas con ensayos en aguas libres a un N° de Reynolds supercrítico. Si estas condiciones no se consiguen con el ensayo del propulsor del modelo descrito en el apartado 5,3, es conveniente construir y ensayar un modelo de propulsor de mayor tamaño o emplear directar mente las curvas procedentes de series sistemáticas cuando el proyeG_ to de la hélice se haya basado en aquéllas. En cualquier caso conviene corregir estas curvas por efec_ to de escala, según se indica en el capítulo 3, Y en lugar de utilizar las curvas tradicionales K , C K- se emplearán las C , K , siendo = 8K„/TrJ , o también (5.2) a. pi2l 4 v2(i-w^)-2 i El valor C„^ calculado con el empuje T estela w y el coeficiente de previstos para el buque a una velocidad V, determina el punto 1 de funcionamiento del propulsor, fig, 99, con lo que se obtie_ ne el grado de avance J_ y el coeficiente de par K^QO' - 81+ - Las revoluciones de la hélice en este punto serán por lo tan (5.3) to "s= ^ ^^-"TS.^/^0^ El verdadero coeficiente de par K„ en l a e s t e l a d e l buque de la hélice colocada Qs es K QO (5.4) v= En consecuencia queda determinado el par absorbido por la hélice (5.5) Q =K„ p n^ D^ s Qs ^ s y la potencia absorbida. 2TrQ n _^s s (5.5) PD= 75 El rendimiento mecánico n de la linea de eies suele estimar se en o.98 cuando la maquinaria propulsora está situada a popa, y en 0.97 si está situada en el centro del buque. La potencia medida en el eje ha de ser finalmente, P =P^/n s D m (5.7) Para mayor claridad, se relaciona en el siguiente esquema to_ do el proceso de determinación de datos experimentales y de extrapolación de estos resultados al buque. m del ensayo de remolque Tm Tm R R nm Tm Tm nm =v L /v' m m C vm w vm m =0,075r/(logR m nm -2) C =C„ -Cw Tm vm V \/ =V s \ m V =v /0,51U4 s s ' R ns vs ns =v L /v s s C =0 ,075r/(logR - 2 ) ^ vs ' ns resistencia del aire en calma R C Ts Cl =C tC +2R /pSv^ Ts vs w a s (cap.2) 85 C =F(R F ) .a ns , . n Ts ^Ts - Ts R^ =C^ pSv /2 Ts Ts^ s cap.2 -^ ^Ts-^^a PE = ^TS %/^^ 2 D^=(C„ -C„ )p'S V /2 (para el ensayo de autopropulsion) 'Tm Ts m m m m del ensayo de autopropulsion m m KTm K Qm om t =(T -R^ +D^)/T m m Tm f m K^ =T /p' n^ D^ Tm m m m 2 5 Qm m m de las curvas características del modelo propulsor obtenidas del ensayo de propulsor aislado, entrando con K„ . K Qo KIdejn entr'ando con J , Qo om n =K. /Kr Qo Qm J=v /n D m m m w Tm w_ =(J-J )/J Tm om Aw„' estimado, cap.U w.Ts wl =w_ -Aw„ Ts • Tm T corrección de t , cap.4 m' ^ Ts=^'Tm(^-^m)/í^-^s) C^^=8T^/P.D2V2(I_,^^)2 .CTI de la curva C =f(J) del propulsor del buque, cap.3 entrado con C^^. ^s^l-^Ts^/'^o^ N =60 s N K K QO Qs de las n: s • curvas K- =K- / n Qs Qo r Q = K - p n f D^ s Qs S P ^ = 2TrQ n / 7 5 D s s s D m características del propulsor del buque, con J - 86 Los símbolos que interesan para la previsión del cpmportamien^ to del buque en pruebas se han rodeado con un círculo, y los que han de servir- de base para realizar el análisis de pruebas, según se explica en el capítulo 6, están enmarcadas por un cuadro,. La potencia determinada.por este procedimiento se refiere a , las condiciones ideales de pruebas: carena limpia, aguas tranquilas y viento en calmao - 87 ~ 6.- ANÁLISIS DE PRUEBAS 6.1.- Análisis con medidas del empuje y del par El análisis correcto de las pruebas de velocidad del ^uque en la milla medida es de la mayor importancia no solo porque permite comprobar el cumplimiento de las estipulaciones de contrato en cuanto a velocidad y potencia, sino también por la posibilidad de contrastar el método de extrapolación de los resultados de los ensayos con modelos, y acumular un material estadístico disponible para la previsión de los resultados de pruebas de futuros proyectos. No es preciso subrayar aquí la necesidad de efectuar las medidas a bordo con la mayor precisión y de adoptar las precuaciones necesarias para que las pruebas puedan ser consideradas válidas. A' estos efectos nos remitimos a la referencia 82 de éste trabajo. En consecuencia'vamos a partir de los datos de velocidad, empuje,.par y revoluciones tomadas a bordo durante sucesivas corridas de la milla, datos que se designarán con el subíndice p:,V , T , Q y n . Es im- portante también medir la velocidad relativa del viento V así como su dirección en cada una de las corridas, Debe recordarse que la velocidad medida V respecto a tie rr^ no es necesariamente la relativa al agua ' debido a la existencia de corrientes . De modo que si llamamos relativa al agua, y V V a la- velocidad' del buque a la velocidad de la corriente. V s +V (6,1) c Para determinar V , que normalmente varía con el tiempo durante la realización de las pruebas de mar, es 'necesario hacer las corridas sucesivas de la. milla en sentidos opuestos, Si se coiv sidera como sentido positivo el de avance del buque, V adoptará alternativamente signos positivos y negativos en cada corrida, y lie vando a un gráfico ios. valores de V medidos aparecerán distribuidos alrededor de dos lifieas, fig. 40, La linea superior corresponde a los valores V - + V , y la inferior a. V -V . En consecuencia, la diferen . p e - ' p e ^ ' — cia entre ambas es 2V , quedando así determinada la curva V = f ( t ) , con lo que se puede ya ..c-alcular la velocidad V en aguas tranquilas para cada corrida. No obstante-, este procedimiento es solo correcto si no se considera la posible acción del aire sobre la obra muerta. Como el aire, no solamente existe, sino que además suele estar en movimiento - 88 y su intensidad y dirección pueden variar durante el tiempo de rear lizacion de las pruebas, su efecto sobre el buque consistirá en acelerar o disminuir su velocidad en proporciones diferentes.para cada corrida, con lo cual se producirá una dispersión -.en los puntos V = • = f(t) de la.fig, MO que puede falsear 'la estimación de la. velocidad, de la corriente, Para evitarlo C.W, Prohaska, 41 , utiliza un gráfi_ co similar al de la f.ig. M-0., pero sustituye los- valores v •,. por. ,v . + -JnD', siendo J el grado dé. .avance obtenido de la curva K^= f(J) del propulsor del buque, entrando con el valor de K medido en cada corri_ da. Fig, 40 Este procedimiento puede mejorarse si sé lleva a un gráfico un valor v' definido asi, c J n D = P P V (6.2) ^-"TS donde w' es el coeficiente de estela efectiva estimado para el buTs . ^ que, y J el grado de avance obtenido de la curva K„= f(J) de la héP 2 4 lice con el valor K„/pn D medido en cada corrida. Si no se dispoT ^ p ne de la medida del empuje se puede utilizar análogamente la curva KQ = f(J), Obsérvese que J n D/(l-w') es el valor V' estimado para la p p . . i s _ • velocidad relativa al «gua del buque utilizando el propio "pi'opülsor como corredera, de modo que, teniendo en cuenta (6.1), la expressión (6.2)puedesustit.uírsepor Vc (V - V ) + V s s c (6.3) - 89 V -V'. es el error consecuente a la estimación de la estela w' , cuyo s s Ts' -^ valor real se desconoce aún, pero en cualquier caso, debe ser un error pequeño y sistemático, por lo que V* adoptará en corridas sucesivas valores superiores e inferiores, alternativamente,a V -V* en I4 cantidad V . De modo que llevando los valores de V' en función del tiem • . c ^ c —. po se obtienen dos curvas, f ig. '+lp cuya semidif erencia entre sus ordenadas es la velocidad de la corriente en cada momento. Con este procec^imiento se elimina la dispersión de resultados a que puede dar liigar 1^ resistencia del viento. En efecto, supongamos que de una corrida sin viento se deduce un valor de V' con el significado dado por (6.3), donde según se ha indicado. (6.4) v; = \/(i-K,^ Si esta misma corrida se hubiera realizado con viento de proa, por ejemplo, la velocidad del buque V habría disminuido una cantidad igual a la disminución de la velocidad relativa al agua AV . Lo cual trae consigo una variación de V , s . a AV^(l-„^^) AV (6.5) Fig. 41 Puas' se supone "l"^ •^^ variación de w„ en este intervalo dé velocidad es despreciable. Ahora bien, esta alteración de la velocidad es detecta_ da por la hélice, que pasa a funcionar a un grado de avance menor. Es_ te viene determinado por el nuevo valor de K ,• ^e forma que en esas condiciones el valor de V sor aislado sería AV calculado partiendo de las curvas de propul_ menor que si no hubiera viento y, por consiguien_ - 90 te, el incremento en el valor de V' sería, según (6.4), (6,6.) A V = A V /(l-wl ) s a Ts La variación de V' sería por lo tanto, de ec, . c AV c = AV s - AV s (6,3), ^ = AV a 1-w T s (6.7) ^-Ss y^ t e n i e n d o en c u e n t a que ^ . w„Ts =w'Ts , V c (6.8) =0 En cualquier caso, como el error en la estimación (w' ) de ^ Ts si no nulo será pequeño,AV' esuaa pequeña fracción de AV . En con- w 1S G ^ secuencia, la dispersión de los puntos V' en cada una de las curvas de la fig. M-1 ha de ser mínima, consiguiéndose por este procedimiento determinar la velocidad de la corriente- con independencia de las a l t ^ raciones producidas por el viento. Es evidente que este método sería incorrecto si las corrientes tuvieran una componente transversal a la dirección de la marcha del buque lo suficientemente granae como para alterar el coeficiente de estela efectiva en uno u otro sentido. Ahora bien, en general ésta; circuns'tancia no se suele dar, ya que tanto la corriente como las corridas de la milla suelen ser paralelas a la costa. Por otra pa.rte, en el caso de que la componente transversal de la corriente fuese importante se produciría un aumento considerable en la resistencia al avance del buque y un momento de giro que sería preciso anular median te la acción del timón, con lo que las pruebas no tendrían validez. Una vez conocida'ia velocidad relativa del buque respecto al agua en cada corrida V =V ^V se determina el coeficiente de este ^ s p c — la efectiva real del buque. J -J Ts siendo J s (6.9) = v /n D el grado de avance anteriormente definido, s p ^ Recordamos que Ids previsiones de,potencia y velocidad se efectúan para condiciones de pruebas en aguas tranquilas y viento en calma. Conviene, por lo tanto, determinar los valores que tomarían el empuje, el par y las revoluciones si las pruebas se hubieran realizado en tales condiciones, - 91 En el capítulo 2 de este.trabajo se recomienda un método para estimar la resistencia producida por el viento sobre la obra muerta de un buque. La resistencia de remolque del buque a la yeloci_ dad V corregida pqr corrientes y con el aire en calma sería la dife rencia entre la resistencia de remolque estimada a partir del empuje medido en pruebas y la resistencia debida al viento, descontando de ésta, ps'turalmente, la resistencia • del aire debida a la velocidad propia del buque. En efecto, (6,10) R s =. T p (Ir-t s )-(R va.-R a ) donde t es el coeficiente de succión del modelo extrapolado al buque según se explica en 4-. 3 , R . es la componente longitudinal de la resistencia debida al viento, calculada según su dirección y velocidad relativa V medida en cada corrida y R la resistencia al . . V . a , . avance de la obra muerta en el aire a la velocidad V. . El coeficiente dé resistencia total del buque es ahora conocido: R (6,11) Ss 1 A " 2 2 ^ ^ ^s que permite deducir el coeficiente de corrección aditivo C .defini_ do en el capítulo 2. Si suponemos que el coeficiente de succión varía poco entre las dos condiciones (con o sin viento) el empuje de la hélice en condiciones ideales sería: • Ro • 1-t (6,12) Ahora bien, en tales condiciones ideales las revoluciones del propulsor a velocidad de avance constante serían algo más bajas que las medidas durante las pruebas. Para calcularlas se puede recurrir a la curva C = f(J) en fig, 42. El punto 1 de esta curva corresponde a la situación real de pruebas, o sea, desarrollando el propulsor el empuje T , Si se sustituye T por el valou T calculado según (6,12) se obtiene el pun_ to 2, al cual corresponde un grado de avance J que determina el valor de las revoluciones por segundo en condiciones ideales de prue_ b a s ,• - 92 - Fig. 42 (6.13) J D o Queda s<31o por corregir el valor del par a estas condicio nes ideales, para lo cual se ha de recordar que en este trabajo hemos elegido la igualdad de empuje para definir los coeficientes de propulsión. Esto significa que el valor del coeficiente de par K„ ^ ^ ° ^ ^ Qop obtenido de las curvas características Fig. 42 para el grado de avan ce J P han de diferir del calculado con los datos de pruebas: P • y el cociente de los dos valores es precisamente.el coeficiente ro tativo relativo real: K rs Qop K (6,15) Qp Según lo expuesto antes, al pasar de las condiciomes reales de prue_ bas a las ideales, el grado de avance aumenta de J a J , y por con p . o -^ '^ — siguiente K„ disminuye hasta K„ . fig. 42. Se puede admitir que en ^ Qop -^ • Qo " ^ ^ este intervalo el coeficiente rotativo relativo permanece constante, luego el par motor del propulsor en condiciones ideales viene expresado por Qo = n K p n ^ D^ s rs Qo s La potencia que absorbería la hélice sería (6,16) - 2TTQ .. D y por último, la potencia s n s s 75 es D 93 (6.17) el m eje, (5.18) . Las curvas características que se utilicen para el análisis de pruebas han de ser las extrapoladas al propulsor real según se ha expuesto en el capítulo 3, o en su defecto, las correspondientes a ensayos supercríticos cpn un modelo semejante de tamaño adecuado. Encualquier caso, serán las mismas curvas que se hubiesen empleado en la previsión de los resultados de pruebas a partir de los ensayos del canal. Para más claridad se resume el proceso descrito en el si- guiente cuadro: V O' medidas directamente en pruebas •P Q K Tp = Q' n P ^p m K = T^/pn2 D"^ Tp p p de las curvas características mediante K Ts estimado por extrapolación de w„ Tp del modelo de las curvas v -J n D/(l"w' ) oara distintas corridas p p p Ts V =V -V (V es positivo o negativo según el sentido de s p c .. c '^ ^ ^ la corr ida ) ' J =v /n D s s p w Ts R VI. ,R ; Ts s p s Método descrito en capítulo 2 del modelo, corregido por efecto de escala (capítulo R =T (l-t )-(R .-R ) s p s VI a 'Ts ^Ts=2Rs/PS-s Ts=^s/^l-^s) C' ^Ts de los ensayos, sin corrección aditiva 4,3) 94 - 'T2 de la curva C = f ( J ) con C^^ n =v (1-w^ )/J D s s Ts o N QP Qop ' rs QO ^Qs s =60n s K- =Q / p n ^ D ^ QP P P de las curvas carácter*!sticas , con J '^rs'^QOp/^QP de las curvas características, con J ^s= So^^s Qs^'^QsP^^s °' P^=27rQ n /75 D ^s s s D m Los símbolos rodeados por un círculo interesan para compro_ bar el cumplimiento del contrato,' Los enmarcados en un cuadro servirá de información para previsiones posteriores de pruebas de nuevos buques. Para resumir y aclarar a la vez el enfoque que se pretende dar con este trabajo al problema de la correlación-modelo-buque-, vamos a analizar de nuevo la ,expresión del rendimiento de. propulsion , D 1O 1-w^ i^:^ (6.19) Es evidente que para poder conocer el verdadero valor de cada una de estas magnitudes sería necesario realizar con el buque los mismos ensayos que se efectúan con el modelo, es decir, ensayos de remplque;, de propulsor aislado y de autopropulsión. De estos tres ensayos el ünicp que se lleva a cabo es precisamente este ultimo, ya que en definitiva las pruebas de la milla no son otra cosa que ensayos de autopropulsion, En cambio, realizar pruebas de remolque con buques reales y de propulsor aislado con hélices a escala natural es prácticamente imposible. En consecuencia, es necesario partir de unas determinadas hipótesis pgra deducir de las pruebas de mar cada uno de los términos de la expresión tes : (6,19), Las hipótesis hechas son las siguien 95 a ) , - El coeficiente de resistencia de remolque de un buque de carena hidrodinaTnicamente lisa se puede predecir de. lo's ensayos con modelos extrapolando los resultados mediante la linea ITTC-57 y aplicando un factor de forma deducido experimentalmente (hipótesis de Hughes ) , b ) , - Este coeficiente ha de ser corregido mediante la adición de un coeficien-te de resistencia C_ -que englobe el efecto de rugosidad a del casco y el influjo mutuo entre viscosidad y formación de olas. En el capítulo 2 se recomienda unos valores provisionales de C , pero a su verdadera definición queda pendiente de' la acumulación de datos. pro_ cedehtes de la aplicación d^l presente análisis a las pruebas de mar de futuros buques, c),- Las curvas características del propulsor experimentan un efec_ to de escala que puede ser corregido según se propone en el capítulo 3 de este trabajo, d),- Igual ocurre con el coeficiente de succión CTjya corrección se expone en el capítulo M-, 3 , e ) , - El coeficiente de estela efectiva está sometido a un importante efecto de escala, Provisionalmente se puede estimar según se e>í_ plica en el capítulo 1,2, Pero ésta es una magnitud que se puede dedu_ cir de l.=is pr>uebas del buque . y conviene, igual que se dijo para C , a la acumulación de futuros datos, • f ) , - El coeficiente rotativo relativo se puede considerar en prin_ cipio exento del efecto de escala. Ahora bien, puesto que este- análisis de pruebas permite la determinación de su valor real, la experiencia dirá si esta hipótesis es correcta, Aunque sé demostrará: que los valores de n. medidos en el modelo y en el buque no coincidieran con una frecuencia significati va,no se podría deducir que esta hipótesis no es cierta, antes bien habría que reconsiderar la validez de la hipóte_ sis c) en la cual se basa la determinación de n , 6,2,- Análisis sin medida.s del effl.puje Consideramos que debe constituir una norma obligada tomar me_ didas del empuje, no solo del par, durante las pruebas de la .milla,. Ahora, bien, considerando que aún transcurrirá algún tiempo hasta que este procedimiento se generalice, se describe a continuación, el proce_ so de análisis que se ha de seguir cuando sSlo se disponga de la medida del par. Como es lógico,este proceso ha de ser muy similar al expuesto anteriormente, con la diferencia de que el papel que desempeñaba allí - 96 la curva característica K„ - f ( J ) , lo representará en este caso la curva K_^ = f ( J ) . H a d e observarse asimismo que el análisis' de pruebas descrito en 6,1 permite determinar los valores de tres magnitudes relativas al' buque : C ,w^ y n . Puesto que en este caso carecemos ^ a T r -^ ^ • del dato T , es necesario prescindir de la obtención de uno de los •s ^ • tres valores citados. La elección debe recaer, según parece obvio, sobre el rendimiento rotativo relativo, que se supondrá indepen- diente del efecto de escala sin posibilidad de comprobación posterior. Con el fin de uniformar criterios mantendremos el principio de identidad de empujes para definir todos los coeficientes de propulsión. Según ésto para determinar la velocidad de las corrientes durante las pruebas de mar se utilizará la curva K =f(J) pero en 2 5 " Qo trandojno con K„ =Q /nn D , sino con el valor K„ =K„ n , fie. 4 3 , Qp P P Qpo Qp 'r* ^ con lo que se obtiene el grado de avance J definido en 6,1, Deter- minando el valor de la corriente según ya se ha explicado, se conocoeficiente de estela w Ts* ce la velocidad V del efectiva buque relativa al agua y, en consecuencia, el Fig, ^3 ••'•a corrección de los valores de n ... •••j medidos en pruebas P P ^ .-crdicion de viento en calma se puede efectuar de idéntica íi:L.a3 r a n :. <•. ?.):. i^ ,, es decir, utilizando Fn fste c5.-:,n e' p u n t o 1 permite 1 p^4l „2 , . la curva C ( J ) , fig, 43, estimar •.;. .2 2 P^^^-"TS) y Q el e m p u j e d e la hélice, 2 TTD — (6,20) - 97 y con el"empuje se tiene también la resistencia de remolque R = =T¿(l-t ) de la que se descuenta la resistencia del viento R .-R . •p s ^ VI a En fin, el resto del proceso continúáccomo se ha explicado, con la única diferencia de que ahora n • :. es él obtenido con el modelo, en lu r — gar de ser el valor derivado directamente de pruebas, A continuación se da un cuadro del análisis de pnuebas cuando no se dispone de la medida del empuje, análogo al presentado en 6,1. % Medidas directamente en pruebas V'p -v ^P Qop w Ts K •= — JLQP pn^ D^ P del modelo Qop r Qp de las curvas características, mediante KQop estimado por extrapolación de w„ del modelo ^ ^ Tm de las curvas V -J n D/(l-w' ) p p p Ts © V =V -V (V es positivo o negativo según el sentido s p c c ^ '^ " de la corrida), , J =v /n D s s p w Ts w„ = (J -J )/J Ts s p s R . ,R VI a método desceito en cap, 2, del modelo, corregido por efecto de escala (cap, 4.3) 'TI dejla Curva C„=f(J), con J T ' p Tp = C^^pTTDV(l-w^^)2/8 R =T (í-t )-(R .-TR ) s p s VI a Ts C' CTS=2R3/PS%' : del modelo, sin corrección aditiva - 98 - 'T2 de la curva C^=f(J), con C s © KQO s Ts o N =60 n s s de curvas caBacterísticas, con J Qs 2 5 Q =K- pn D s Qs s P„=2TTQ n /75 D ^s s ^ = PD/^m 6.3.- Corrección de resultados por aguas poco profundas Aunque normalmente se exige una profundidad mínima para la realización de las pruebas de ia milla, ( 8 2 ) , puede ocurrir que en al gún caso concreto se lleven a cabo en aguas de fondo algo menor que el recomendado. En este caso es necesario corregir los resultados de pruebas teniendo en cuenta esta circunstancia, pudiéndose considerar las pruebas válidas siempre que la corrección de la velocidad por efecto del fondo sea poco importante, A continuación se va a tratar brevemente ék problema del efecto de aguas poco profundas en la resistencia al avance de una ca rena, en su relación con el análisis de pruebas de mar. La presencia de un foddo relativamente próximo a la super_ ficie da origen a la modificación de la distribución de presiones a3^ rededor de la carena del buque, aumentando la sobrppresión a proa y la depresión en popa, así como las velocidades relativas en el forro. De modo que tanto la resistencia por formación de olas como la resistencia viscosa son mayores que las experimentadas por el buque en aguas de profundidad infinita a la misma velocidad. El efecto del fondo en la resistencia di avance debería plantearse, por lo tanto, como el estudio de un flujo uniforme que in_ cide sobre un obstáculo, el buque, y cuyas condiciones en los límites vienen impuestas no solo par la superficie libre y por la veloci_ dad en elvfmfinito, sino también por la presencia J)róxima del fondo. 99 donde la c o m p o n e n t e nula, Naturalmente menos las mismas - de la velocidad la solución dificultades n o r m a l a, su _s,uperficie ha de ser teórica que el cálculo aguas p r o f u n d a s , Es p r e c i s o r e c u r r i r esta {8 3 } linea no se puede que^aunque eludir publicado te de todos los t r a b a j o s no se puede decir Schlichting sea un modelo Según navega del- p r o b l e m a p r e s e n t a de la r e s i s t e n c i a a soluciones la r e f e r e n c i a que el análisis sobre en p r á c t i c a s j y en al t r a b a j o en 1 9 3 4 , ha pasado posteriores por lo a ser base de Schlichting prácticamen-- el t e m a . A pesar de ello de este p r o b l e m a r e a l i z a d o por • de r i g o r , como se verá a c o n t i n u a c i ó n . este autor el defecto en aguas de p r o f u n d i d a d de velocidad limitada se debe de un buque que esencialmente a dos causas : a),- La d i s m i n u c i ó n de las olas o r i g i n a d a s b),la carena da de la velocidad por el b u q u e . El aumento de la v e l o c i d a d debido (A V ) de p r o p a g a c i ó n a la r e s t r i c c i ó n m e d i a del flujo ( A V ) sobre causada por la p r o f u n d i d a d limita- ("back f l o w " ),,• En agua de longitud de p r o f u n d i d a d L' viene h la velocidad de p r o p a g a c i ó n de olas dada por la e x p r e s i ó n , . w 21T tanh Cuando la profundidad 2w.h ( 6 , 21 ) es muy grande la relación.h/L se acerca a infinito y tanh, (2Trh/L ) se aproxima a la unidad. Con lo w que la velocidad de propagación en aguas profundas es „2 _ gL„ 2TT La hipótesis de Schlichting • • (6,22) consiste en admitir que la re- sistencia por formación de olas de una determinada carena viene defi_ nida por la longitud de las olas, creadas por ésta, De modo, que la resistencia R- de un buque que navega en aguas de profundidad h a la w , velocidad V es la misma que tendría navegando a velocidad V en aguas profundas. Este supu.esto incluye dos inexactitudes. Primero, que al variar la profundidad ño solo se altera la longitud de las olas para una velocidad dada, sino también su forma; es decir, que nd hay una relación biunívoca entre longitud y energía de las olas. Segundo, que - 100 el aumento de velocidad media (AV, ) citado en el apartado b) influye también en la resistencia de olas, no solo en la resistencia viscosa, No obstante, el criterio de Schlichting puede considerarse co_ mo una aproximación aceptable cuando el efecto del fondo es poco importante, Este es el caso de las pruebas de velocidad sobre la milla que estaraos considerando, ya que para su realización se exige'en cada caso una profundidad mínima por debajo de la cual, las pruebas notienenvalidez. Fig, 44. En la fig, 44 se describe el método para determinar la curva de resistencia total de una carena en profundidad limitada a partir de ias curvas de resistencia total y de fricción en aguas pro fundas. La resistencia total en profundidad infinita de un buque a velocidad V viene dada por la ordenada del puíito A, La velocidad V 00 ^ _ '^ W a la cual R es la misma para una profundidad h se obtiene de (6.21) w y (6.22) por eliminación de L . Trasladado el punto A paralelamente a FG hasta la abscisa de V se obtiene la ordenada del punto B que sería la resistencia en aguas limitadas sin tener en cuenta el incremento de velocidad media del flujo junto a la carena, Por lo tan_ to, si se traslada ahora B en dirección paralela al eje de abscisas en un segmento ^V, se obtiene el punto C de la curva de resistencia total en aguas de profundidad h. - 101 La reducción de velocidad AV^^ fué estudiada por Schlichting ensayando modelos en aguas profundas y limitadas, y encontró que la variable más influyente era la relación /A^/h (A^, área de la sección máxima). En fig, 45 se representan las curvas V^ y V^ en función de V //h7. V V, /V en función de /AT/h 0 0 ° ' - ' . n w n dadas por Schlichting,, las . cuales permiten calcular los valores de AV^ y AV^^. Para facilitar la estimación de la corrección total AV^ + AVj^ este autor preparó un diagrama, representado en fig, 46, que no es sino una consecuencia de las curvas de la fig, 4.5, Ha de tenerse en cuenta en la aplicación de este diagrama que. la pérdida de velocidad AV^+AVj^ conduce a u n . punto de resistencia más baja que en aguas poco profundas según pue_ de verse en fig. 44, 1.00 . p-^i^a,^ • ra^ ' O.BS tf^fej 0.82 0.Q® _ — i 0.84 \ / • 0.3 Q.á 0& O.S 1.0 1.2 1.< •• Fig, 45 . Lackenby {85} recomienda realizar la corrección AVJ^ + A V ^ + •kAV que.corresponde.a resistencia constante, fig. 44. El valor de w k se; deduce fácilmente de esta figura, donde kAV^ = CE ya que CE = = AV dV w' dV y por lo tanto dRj CE = AV w*' dT dV dR, (6,23) - 102 - ^^b Fig. 4 6 Si se supone que la variación de la resistencia con la velo_ cidad tiene en el tramo que se considera,la forma R=AV , siendo A una constante y siendo n distinto para cada tipo de resistencia, por lo que hay que afectarle del subíndice correspondiente, se obtiene tl2 (6,24) dV dRj (6.25) dV" = n y en consecuencia CE ^f"f AV w R^n^ (6,26) k = El valor de n^, aunque algo menor, puede suponerse igual a 2, pero el de n_ puede variar- ampliamente, de modo que para calcularlo en cada caso es preciso conocer dos puntos de la curva R^ relativamente próximos y entonces n vendría dado por log (6.27) log - 103 ;»•'• Según veremos a continuación^ la mayoría de las pruebas de la niilla se realizan a números de Froude relativos a la profundidad F. = v//gh suficientemente bajos para que la corrección AV sea dés- preciable, en cuyo caso la corrección de velocidad se reduce a AV, , y se ha de efectuar a resistencia constante. En la fig. 45 se puede ver que para V/v/gí|<0.6, que es prácticamente equivalente a la recomendación de profundidad mínima h>0.07í+ 2 V (V en nudos) de la propuesta de norma para Pruebas sobre la milla medida de la A,I,C.N.'{82}, la relación V /V^ es prácticamente la uni w dad; o sea Avw=0'. Este criterio da las velocidades por debajo de las cuales no es preciso corregir por variación de velocidad de propagación de las olas en las distintas bases españolas, Bases medidas españolas Profundidad en metros "Ria de Ares". El Ferrol Velocidad en nudos 34-17 . 18 60 28 "Castro-Urdiales"Santander 50 26 "Estay-Friegue" Vigo 40 23 "Rota-Chipiona" Cádiz 20 16 "Zahara de los Atunes" Cádiz 60 28 "Terrosa-Palomas" Cartagena 75 32 "Valencia (Puig)" 35 22 "Islares" Bilbao 35 27 "San Jorge" " " De. aquí se deduce que para la mayoría de las bases medidas y de los buques mercantes en pruebas no es necesario hacer la corrección Av . Por lo que la corrección de velocidad, a igualdad de resistencia, queda reducida a Av, , b El gráfico de Schlichting, fig, 46, abarca hasta valoresade de 1.40, donde la corrección de velocidad AV,b , supuesto AV w M /h , despreciable, es del orden de un 16%, Naturalmente es inadmisible rea_ lizar las pruebas de la milla en una profundidad tal que dé lugar a coJ?recciones tan elevadas. Esta corrección, no debiera ser superior al 2% o al 3%, pero esta zona queda indefinida en este g^áfico^ Lackenby lo ha completado {85} utilizando datos experimentales procedentes de pruebas reales con buques de diferentes características, proponiendo la siguiente expresión analítica: AV, =0,124 M h2 0»05 /A~ para - r ^ >0,225 (6.28) -• 10 4 ~ J.R, Scott { 86 } opina que la fórmula de Lackenby proporciona correccio_ nes un poco bajas, y propone otra expresión: A2 AV 0. 90 A 'A M p a r a » • . <0t 5 (6,29) La expresión (6,28). representada en un gráfico cuyo eje de 2 abscisas sea A^/h •, es una recta de pendiente 0,121+ que corta a este eje en x=0,05. En cambio (6»29) es una parábola de segundo grado de eje vertical que no corta a la recta (6,28) en ningún punto y que, por lo tanto, proporciona corr'ecciones más elevadas con un exceso crecien_ te a medida que aumenta -/A' /h, cidad dada por Lackenby para Por ejemplo, la corre'cción de la velo''A„/h=0,5 es de 2^5% .En cambio la de Scott sería de 5 ,.6% para la misma profundidad. Ante esta sensible disparidad de resultados, es evidente la necesidad de una., contrasta_ cion empírica para lo cual hemos realizado nuevos ensayos de remolque con el modelo de la serie 60 construido para este trabajo, vaciando el canal hasta tener una profundidad de 0.46 metros. Se ha elegido esta profundidad con el fin de que la relación V//gh sea inferior a 0.6 en el intervalo de velocidades correspondiente a estos ensayos (de 1.0 a 1.2 m / s ) ; de este modo la corrección Ay será desprecia- ble. En fig, 47, se representan las curvas de resistencia de remolque de este modelo en aguas profundas y con profundidad limitada. Puede observarse que el incremento de velocidad al pasar de aguas limitadas a aguas profundas no, es un porcentaje constante para todos los puntos de la curva sino que aumenta ligeramente desde un 5% en el punto de velocidad más baja, hasta un 5,9% a la velocidad máxima. La previsión de este incremento según la -fórmula de Lackenby es de 5.2%, lo que constituye un buen resultado^ En cambio la fórmula de Scott da para este caso un incremento del 20% en la velocidad. Si , bien es cierto que el valor A cabilidad de la expresión /h=0,68 queda fuera del campo de 'apli_ (6,29), puede suponerse que l?i fórmula de. Scott proporcionará correcciones demasiado optimistas incluso con profundidades superiores. Por todo lo cual, parece recomendable la aplicación de la fórmula de Lackenby para estimar la corrección de la velocidad por aguas poco profundas. Una vez realizada la corrección de velocidad no será preci so efectuar ninguna otra, co,rrec:ción con tal.d,e que se consideren los valores de empuje, par y revoluciones, medidos en aguas limitadas , como los correspondientes a la velocidad corregida en aguas profundas. - 105 - 600 500 - m 1,0 0^ RyT(N9) AouQ¿ profundas " lirñitedss 0,5 1.2 1.0 V(m/s), Esto es correcto si el efecto- del fondo es suficientemente pequeño como para suponer que el incremento de velocidad relativa AV, no trae consigo una variación propulsión . •''apreciable de los coeficientes de . . Para comprobar el error inherente a esta aproximación se ha realizado un ensayo de autopropulsión con el modelo de la serie 60, sobre la misma profundidad h=0.46 m, a que se efectuaron los ensayos de remolque. En la fig, 47 se han llevado los valores de em^ puje,' par y revoluciones en función, no de la' velocidad medida en el carroj sino de la velocidad corregida a igualdad de resistencia según los resultados dé remolque, Asimismo se han representado los resultados del ensayo de. autopropulsión en aguas profundas. Puede y ^ 106 ^ observarse que las .cúpy^aS;^ de empujé ¿ón qoincidentes , \p- que signifi^ ca que el coeficiente .d.e.f/succión ha permanecido inalterado. Las cur_ vas de par coinciden igualmente, en cambio^-. la\s_ revoluciones en aguas limitadas son un 3% inferiores a las obtenidas en aguas profundas, lo ¿\iál indica que la estela ha aumentado, ligeramente , Teniendo en cuenta.que en el ca.so considerado la profun.didad era tal, que daba lugar a una>corrección de velocidad del 5,5%, y que las pruebas sobre la milla medida no deben dar lugar a correcciones superiores al 2% para tener validez, se puede admitir para el análisis de pruebas,que ?1 fondo no afecta a los coeficientes de succión y estela. En cpnsecuencia no será necesaria otra corrección que la correspondiente a la velocidad,realizada. de la manera indicada, Veamos ahora como incide esta corrección de velocidad por aguas poco pi^ofundas en el análisis de pruebas que se propone en es te trabajo. Según se acaba de,mostrar puede admitirse que, en un tanto por ciento elevado d© las pruebas de mar sobre la milla, el efecto de la relativa proximidad del f.ondo consiste solamente en un incremento en la velocidad media del flujo alrededor de la carena. Como, por otra parte, este efecto ha de.ser pequeño a fin de que las pruebas tengan validez, puede suponerse que la distorsión del flujo será inapreciable y que, por lo tanto, los coeficientes de prqpulsión serán iguales a los que tendría el buque en aguas de profundidad infinita. En consecuencia, cuando se realizan las pruebas con profundi dad relativamente pequeña, la velocidad del buque re.specto del agua, es superior a .la calculada por la ecuación (6.1) en una cantidad función de AV, h: V -V +AV P c .siendo, como antes, V • (6.30) la velocidad de la corriente y V '. c • la medida p respecto a tierra,' La expresión de V' definida en ec, ( 6 , 2 ) , es en este caso, . - . V . • . • • _ c =V -J h D/(l-w' c .,.. . p ' . p ..p . • ) Ts • (V - V )-AV s s +V . (6.31) Por lo.tanto, el efecto del fondo en las curvas para determinar la. velocidad de la corriente V (fig, "+1), consistirá solamente en un de's'piaZ:a.mientb vertical negativo del valor ^V, conservándose la dis tancaa'entre las dos curvas ,y, en consecuencia, los valores de V . En definitiva, el procedim'iíento propuesto en este último capítulo pa_ ra determinar la velocidad de la corriente en aguas profunda:S sigue siendo válido cuando las pruebas se realizan con una profundidad re_ lativamente limitada, - 1Q7 - . • - -te-niendo sorámeri't'é •en--cue-nta "-que ,l,a ,,v,e.Lo'.c idád '.^de;!-/liuque : r.'es_ 'pecto^ del . agua'-vierie'-•eTii''''esTt"é caso d'etermina.da,-;.p;Orí.,rla,.edua.G.i 6n (6; 3 0 ) •'en lugar" d e ' C 6 , Í ) , el" pr'bb:eso'••de análisis de pruebas c o n t i n ú a a-papT^ •:'tir "de este valor, tal y como yá se ha Cos'ax'X-cO'.. .¿. sin d-e'" in- t r o d u c i r ninguna- otra c o r r e c c i ó n necesidad •'-'• complementaria, Si, una vez determinado el 'verdadero valor del coe f ic "•• ó^-.t «^ de estela w mediante el análisis' de pruebas propuesto, se prepai'a • un gráfico' similar al de la fig. .41, 'pero llevando los valores de^ V -J^n D/(l-w„^) (5. 32) " obtenidos en cada corrida, es decir, el verdadero valor de V -V . . . . P s en lugar del estimado V -V', la ecuación (6.31) se convierte en p s V (6.33) AV + V c con lo que la ordenada media de las dos curvas de la fig. 41. es pre_ cisamente el incremento , de velocidad debido a la proximidad del..fon_ do.. El valor de A V así determinado puede servir para comprobar.si el efecto del fondo estimado había sido correcto. Si fuera conven iente... podría repetirse el análisis de.pruebas empleando el. verdadero "/.•"•.lor • d e ^ .•'- V , , . , Como consecuencia:-, puede decirse que el método , propuestóen este trabajo para ca|Lcular la velocidad dé la corriente dur.ante la^ .realización de las pruebas de m.ar no sólo puede proporcionar unos valores más correctos de la velocidad real del buque respecto del agua, sino que además ha permitido deducir un procedimiento para de terminar el efecto de aguas poco profundas en la resistencia al avan_ ce, a partir de datos obtenidos directamente de las pruebas. 6.4 Estado de la mar •Las previsiones del canal se refieren siempre a unas condi- ciones de pruebas ideales co'^- aguas tranquilas y viento en calma. Así como la resistencia, del viento puede estimarse', .con sufic-; ?nt e aproxi mación, como hemos visto, midiendo la velocidad relativa al buque, es prácticamente imposible estimar el aum'en'to'de reé'ist encia debido al e.'^:tádo de la mar, ya que, en principio, la definición de éste es muy imprecisa. .,- Esta determin.ac.ión. suele h,a;c.e..ir;se, utilizando las clásicas den.omin.acipnes, de mar en., c.alma , . r iz;a;da.', .^mar.e j adi.lla , etc., q-áe a la vez están realcio''nadas, concia fuerza d.el viento medida se.gún' la esca_. la Beaufort^ En vista de ello no es recomendable realizar las pruebas í - 108 con un. estado de la mar con calificación superior a la fuerza 3 en , la escala Beaufort, según se recomienda en la propuesta de norma de, la A,I,C.N, {82}, El aumento de resistencia por este concepto será entonces pequeño y, en cualquier caso, deberá incluirse en el coefi^ cíente de corrección C , Agradecimiento. El autor desea agradecer a D. Luis de Mazarredo, Director , de; ..la Asociación, de Investigación de la Construcción Naval, entidad patro ',cinador^ de esta tesis, la supervisión de la misma. -.,.,•.. •:-Al ya fallecido D, Manuel L.Acevedo, que facilito los • resulta'•'. dos de los ensayos realizados en ^1 Canal del Pardo, cuando era Direc' tor de este Centro, • :,',•)•; Al- Sr. Fernandez-Vega, que ha colaborado con la preparación de los programas de cálculo y cpn la elaboración de las figuras. ' A las '•• Srtas.. Alicia Díaz y Lidia Rivera que junto con el Sr. Calzado^ Han p'r'e parado.esta edición, Y, en general, a todo el personal técnico y de talleres de l a " A.I.C.N., ya que todos de manera más o menos directa han colaborado en la consecución de este trabajo. Madrid, Octubre, 1971 r ..• - 109 APÉNDICE APLICACIOr DEL MÉTODO DE EXTRAPOLACIÓN T "ANÁLISIS DE PRUEBAS.' A ^ U,N. BU',V. QUE DESCARGA DE' 13 5 METROS DE ESLORA Con el fin de dar un eje,mplo de l.os métodos de. extrapolación y análisis propuestos, se ha elegido un buque de carga de caracterí.s.ticas muy frecuentes en la flota mercante, Los resultados de los ensayos, correspondientes a los calados' de 'pruebas ,'Í -con- uii ''mbdélo'-a 'es'cal'a ' 'X"-"?5' 'sé' han' extrapolado median_ te .'la lirféa'••ÍTTÍ^C-5'7 , ••aplic'atid'o'^ ürí' fác't'or' dé 'forma r='ij0 (a'próxi"m'ad'ó "pi'á'ra este coeficiente-"de"' bloque , por rio haberse determinado en los ens'áVQS ) „y. Gor^r-ección- a-d.itiya C =0, (.^xliO.".^ ,• „4e acuerdo,; apxoxima.da'mente , 1 - • ' • • • ' .. • - " a con la .f ig , ,'l'^ , Se ;ad.j,unta.;:la :ho.j a d.e !-cál.cul,.os' .para est i-mar los ••coe'.-.>.-.' ficientes de propulsión del modelo, , ..•-. ..-;....• • í.- •.'.• , . •,.... ,.E1 -efecto de ..escala -en la' estela, estimado según se indica 1/3 en (4,2) con los coeficientes de -f'orma de^ este buque: C =0 , 70 ...-.L'/V :,^:= ' -.6.6^,y. p/L.= .0.. 0 3 5,, es- AW^=0,08 .. • P ,-, .: • . .• . , ; .- .; •, • •.•-.•.-.- - Se ha considerado también el efecto de e'scal'a en el' cdefic"ien_ te. de... suc.ció.n , y .,el aume;nto. de. •resistenqia debida :al aire... .: •'-L'á- estimación' de-'la poten-cia y de las revoluciones sé h'a 'realizado mediante las curvas C =f^(J) y K^=f„('J) del propulsor' del buqué cuyas características son:: D=4,75 m, P/D=0,81, A /A =0^56 y 4 palas. En la fig, 48 se representan las curvas de la potencia en el eje y de las revoluciones en función de la velocidad previstas para las condiciones ' ideales de pr'-iiebas , Las pruebas sobre la milla se realizaron con los calados del buque en lastre T =4,67 m; T -T =2.5 m,, sobre un fondo de unos 26 m ' pp pr • metros y con un viento de fuerza 2 soplando casi de costado. Se realizaron seis corridas de la milla, las cuatro primeras al 100% de la potencia y las dos últimas al 65%, Los resultados se ofre_ qen en el- siguiente cuadro: Hora Dirección y fuerza del viento Rumbo Velocidad nudos RPM Potencia " -" SHP"~ 16, 55 NE-2 340° 18 ,20 157 7 ,950 1 7 . 15 NE-2 160° 17,38 155,5 7. 750 17,30 NE-2 340° 18,14 157 7 , 950 17,55 NE-2 160° 17 ,48 156,5 8 , 040 18,15 NE-2 340° 16,25 136 5,040 1 8 , 30 NE-.2 16 0° 15,63 136 5,175 • BUQUE DE CARGA DE 135 METROS FlloAYO PE AUTOPRCPÜLSlOfI EIIÜAYü II fíüDELO M r u I c e I 011 ITTC l'J5 7 RATOS DIlílSinAD DHL AGUA m.l Di:nSlDAn DTL ACUA DCL CAR r A N A L - - 1 0 1 . 0I(KGS2/Mlt F3CALA ESLORA DHL ('.OOPLO SUPLEHENTO POR RUGOSIDAD TACTOR DP PPRIIA • Vfl M/S 1.079 1.Ü19 l.'JSl 2.030 I!0 lUU. 61KGS2/M1* ' 22.00 6.1611 Ü.ÜOUI4ÜÚ l.OÜO RT K.G 3.70U lf.32ü 5.100 5.770 582.000 C35.000 092.000 73P.UU0 VISCOSIDAD CUFrATICA P T l ACUA PFIL CAI.'AL- O . U i; J O U l j •} 2 ! ; 2 / S VISCOSIDAD CiriEI'ATICA nri P fL O.ÜCOüUliSol AGIJA fAP P I Al-'IVfP.O PPL PPOPULSOR PP!. rOPPLC SUI'FRF i C I r rOJAPA D IL l'ODPLn ÜUIX'-'C PP PJPS DC L PUIIL'P O . 2 1 í) b.:>H7 1 o TO KG J.IÍ2Ü U.03Ü U.S20 5.500 ro KG*i: 0.a'Jb7U 0.115UÜ 0.137ltü 0.15800 PPÜ KG O.'JOl. l . i U / 1.313 l.liOl KT KO. SUCC 0.2073 ,0.212c 0.211)3 0.211)2 NM 575.361» 029.210 G87.105 730.990 PTAR 1.0900 1.0330 1.0315 1.0737 QM nC*M O.U93l»i 0.11101 0.131)32 ü.151*59 ni 1.2075 -1.1333 1.1031. 1.1591 TU KG 3.297 3.901» U.7Ü5 5.lt33 0.2805 n.216lt 0.130'J 0.0J5'J rilFL 0.5911 0.S931 0.5900 0 . 58 ÍG ri'ROP O.TTüli 0.7602 0.71(02 0.7323 J i . 0.Ü353 O.Ü2ÜÍ, 0.01'Í'O Ü.OU-J/ RESULTADOS VS mOOG 15.318 10.59!: 17.709 1U.520 2/S !í !'2 »;a \.T 0.2929 Ü.2873 0.279 L 0.2730 0.5i(ltO 0.33lt5 0.3273 0.3221 vio 0.5729 0.5725 O.ÍOai) 0.L0Ü5 . JT 0.S315 U.Í3I|5 0.Í3Ü7 0.t231 OFCIX,) l.USoÜ 1.2ii0i l.li031 1.W07 0.200Ü ü.!iCüU O.CÜOU O.SÜUL- 111- W Tm 0.3- WTS W TS 0.2- 150-- N 130 8000-- 7000 6000 5000 Previsiones de ensayos Resultados de pruebas " " " corregidos 4 o 15 17 16 V(kn) Fie. o.u 17. 0 v¿-o^^ Horas , 17.30 i \ 48 19. 18.30 1 '.—1 ^^r- ——.-> ~ ^ ~ " ^ ^ -0»8 Figo«*9 .112. En la fig, 4-8 se han llevado los puntos representativos de la potencia en el eje en función de la velocidad, correspondientes a cada corrida, sin corrección alguna. La velocidad de la corriente se ha calculado por la semidiferenciá de las ordenadas de las curvas V' representadas en la fig, 49, De este gráfico se han obtenido también la corrección de velocidad AV por aguas poco profundas, El valor medio de AV en las cuatro primeras corridas es de 0.30 nudos, valor algo superior al que resulta' de la formula de Lackenby para este caso:0,21 nudos, La corrección por proximidad del fondo de las dos últimas corridas realizadas sobre una profundidad tres metros mayor, es de 0,26 nudos, La corrección por viento es del orden de 50 C.V, a 18 nudos, y de 30 C,V,, a 16 nudos, en las corridas impares, En las pares, es- ta corrección es despreciable, Los resultados de potencia y revoluciones,ya corregidos,se han llevado al citado gráfico 4 8 , donde puede apreciarse que la dispersión de los resultados de velocidad en pruebas respecto a.' su valor medio es del orden de un 1%, y que la curva de potencia prevista por extrapolación de los ensayos con el modelo es prácticamente la linea de regresión de los resultados de las pruebas, Puede también observarse la adecuación en este caso del método empleado por lo que se refiere a la curva de revoluciones, El coeficiente de estela efectiva real del buque deducido del análisis de pruebas es algo mayor que el previsto a partir de los resultados de los ensayos en el modelo. En Fig, 48 se representan las curvas del coeficiente de estela del modelo, W„ , del buoue , W„ , y ' Tm' ^ ' Ts ' -^ del previsto, W' , Puede comprobarse que el error en la estimación de la velocidad de avance del propulsor V (1-W ) ha sido de +3,4%, REFERENCIAS 1. Seventh International Conference on Ship Hidrodynamics. 1954. 2. International Towing Tank-Conference. Madrid, 1957. 3. ITTC. París,1960 4. ITTC. Teddington ,1963. 5. ITTC. Tokio, 1966. 6. VAN LAMMEREN:"Scale effect experiments on Victory ships and models , Part.I". INA.1955. 7. CONN', L A C K E N B Y y'WALKER: "B.S.R.A. Resistance experiments on the Lucy Ashton, Part.II. INA,1953. 8. ACEVEDO:"Resistencia por viscosidad y correlación modelo buque según los nuevos cri'terios , en el caso de un supertanqué ". Inge i ;nierfa Naval.,1955. 9. MOVEL:"Resistanceiand propulsión tests on a Victory ship model". National Research Laboratorius. Otawa,1954. 10. SCHOENHERR: "Resistance of fíat surfaces moving through a fluid". SNAME,1932. 11. TELFER: "Ship model correlation".INA,1953. 12. HUGHES: "Friction and form resistance inturbulent flow and a propo_ sed formulation for use in model and ship correlation". INA,1954. 13. TODD: "Skin friction resistance and the effects on sufarce rough ness on ship resistance". 5NAHE.1951. 14. ALLANO y CUTLAND:"The effect of roughness on ship resistance".NECI 55/56,vol.72. 15. WIGLEY: "The effect of viscosity on wave resistance".Schiffsteknik, April, 19 62. 16. HUGHES: "The influence of form and scale on model and ship resistan^ ce". ITTC,1963. 17. SASAJIMA y TANAKA:"Form effects on viscous resistance and their es_ timation of full ships".ITTC,1963.' 18. GROTHUES-SPORK: ^iodell familien- Untersunchungen Ubér das Forschungs_ schiff "Meteor"- und einen tanker" . Schif f bautechnischen , 1965. 19. lACXENBY: " An investigation into the nature and interdependence of the components of ship resistance".INA, 1965 20. OKADA y TSUDÁ: "On some results of form factor measurements obtained in wind túnel test".ITTC,1966. 21. YOKOO y otros: "Roughness of hull surface and its effect on skin friction".ITTC,1966. , 22. TANIGUCHI:"Study on scale effect of propulsive perfomance by use of geosims of a tanker". ITTC,1966. 23. HUGHES: "An analysis of ship model resistance into viscous and wave componénts", Part. I y II. INA,1966. 24. ROY: "Couche limite turbulenta incompresible et resistance de frottement du navire " These de Doctorat es Scienc@s Mathematiques", 1967. 25. HUGHES: " An analysis of ship model". Part.III. INA,1967. 26. TOWSIN: "The frictional and pressure resistance of two Lucy Ashton geosims".INA, 1967. 27. GADD: "A new turbulent friction formulatipn based on a reapraisal of Hughes results". INA,1967. 28. SCOTT: "A contribution to ship-model correlation from,"Lucy Ashton" results".INA,1968. 29. CONN and FERGUSON:"Results obtained with a series of geometricaly similar models". INA,1968. 30. ALLAN y CANHAM: "Ship trial performance and the model prediction" INA,195U. 31. CLEMENTS: "An analysis of ship-model correlation data using the 1957-ITTC line".INA,1959. 32. HADLER:"Correlation allowance of single screw merchant ships". ITTC,1960. 33. HADLER, WILSON and BEAL :"Ship standardization trial performance and correlation with model predictions" SNAME,1962. 34. H A C K E N B Y : "The resistance of ships with special reference to skin friction and hull surface condition" I.Mec.E. 1962. 35. WELLMAN:"Survey,of hull and propeller roughness data". Shipbuilder and Marine Engine Builder, 1963. 36. CHAPLIN: "Análisis de datos de rugosidad de la superficie del casco" European Shipbuilding, 1967. 37. CASTAGNETOs" La procedura nórmale di trasferimefcsto modello-nave da adottarsi dalla Vasca di Roma,1960. 38. TANIGUCHI:"Model-ship correlation method in the Mitsubishi Experi-. mental Tank" 1963. 39. LINDGREN:"Ship trial analysis and model correlation factors" ITTC, 1963. • f 40. "BTTP 1965 Standard procedure for the prediction of ship performan_ ce from model experiments". NPL , Rep.,80. 41. PROHASKA: Trialtrip analysis for six sister ships". Transactions of NECI, vol.78. 42. G.HUGHES:"Model 1930 P.310. experiments on the wind resistance of ships".RINA^ ^ 3 . G.HUGHES: "The a i r r e s i s t a n c e of s h i p á ' h u l l s w i t h v a r i o u s t y p e s d i s t r i b u t i o n s of s u p e r s t r u c t u r e s " . I E S S - 1 9 3 2 P . 3 0 2 . 41+. D. A. ^HEARBR: y M.LYNN: "Wind t u n n e l t e s t s .on models of m e r c h a n t NECIES-1960 p , 2 3 0 y I S P - 6 1 f e b . p . 6 2 4 5 . H.L.DOVE: C o n t r i b u c i ó n a l a d i s c u s i ó n NECIES-1960. 4 6 . J.IPETKOVIC: " B e a u f o r t . . d e l t r a b a j o de wind s c a l e V . . " I S P - 1 9 6 4 and shipsV referencia(4U) p.l93 4 7 . H,J.S.CANHAM:"Conducting m e a s u r e d m i l e t r i á i s " SWS 1967 p . 8 5 2 . 4 8 . G.AERTSSEN y P.E.COLÍN:"Wind t u n n e l t e s t s on a model of a c a r - f e r r y " . ISP 196 8. 4 9 . LERBS, " On t h e e f f e c t s of s c a l e and r o u g h n e s s on f r e e r u n n i n g p r o p e l l e r s " . J . A . S . N . E . 1951 5 0 . GOLDSTEIN, "Modern de v e l o p m e n t s i n f l u i d d y n a m i c s " . O x f o r d . 5 1 . BAKER, " S c a l e e f f e c t of a s c r e w p r o p e l l e r " , I N A 5 2 , p a c . 6 4 . 5 2 . NORDSTROM, EDSTRAND y LINDGREN, "On p r o p e l l e r s c a l e e f f e c t s " . SSSET, N028, 1 9 5 4 . 5 3 . FERGUSON,"The e f f e c t of s u r f a c e r o u g h n e s s on t h e p e r f o r m a n c e of a model p r o p e l l e r . I N A 1 9 5 8 . 54 LAP y VAN MANEN,"Scale e f f e c t ' e x p e r i m e n t s on V i c t o r y s h i p s and mod e l s - P a r t s I I I and I V " , I N A , 1 9 6 2 . 5 5 . WELLMAN, "A s u r v e y on h u l l and p r o p p l l e r r o u g h n e s s d a t a " S h i p b u i l d e r and Marine E n g i n e B u i l d e r , 1 9 6 3 . 5 6 . MAZARREDO, " S o b r e l o s p r o p u l s o r e s que t r a b a j a n - en c o r r i e n t e - ^ u n i f o r me y su e n s a y o en un t ú n e l de c a v i t a c i ó n " . Reunión de v e r a n o en España de l a R . I . N . A . 1 9 6 4 , 5 7 . TANIGUCHI, "On m o d e l - s h i p c o r r e l a t i o n i n p r o p u l s . i v e p e r f o r m a n c e " J a p a n S h i p b u i í i d i n g , Mayo 1 9 6 7 . . ^ 5 8 . MEYNE,"Experiments und t h e o r e t i s c h e B e t r a c h t u n g e n zum M a s t a b s e f f e k t b e i M o d e l l p r o p e l l e r u n t e r s u c h u n g e n " . ST • 196 8.,; 5 9 . R.BRARD y M.AUCHER, " R e s i s t a n c e á l a marche , s i l l a . g e , s u c c i ó n , e f f e c t d ' é c h e l l e s u r l a p r o p u l s i ó n " ATMA-1969. 6 0 . VAN LAMMEREN, VAN MANEN, y O o s t e r v e l d , " t h e V/ageningen B-Screw S e r i e s " . SNAME,1969. 6 1 . S.A.HARVALD, "Wake of m e r c h a n t s h i p s " Danish T e c h n i c a l P r e s s , Copen hague. 1950. 6 2 . SCHLICHTING, "Boundary l a y e r t h e o r y " 1955, 6 3 . VAN MANEN Y LAP, " S c a l e e f f e c t e x p e r i m e n t s of V i c t o r y s h i p s and mod e l s ( P a r t . I I ) RIÑA 1 9 5 8 , 6 4 . F.H.TODD, " C o n t r i b u c i ó n a l a d i s c u s i ó n d e l t r a b a j o de r e f e r e n c i a (54) 6 5 . F , H , TODD, " S e r i e s - 6 0 . M e t h o d i c a l e x p e r i m e n t s - w i t h models of screw m e r c h a n t s h i p s " , DTMB r e p . 1 7 1 2 , 1 9 6 3 . single 66. Hess y Smith, "Calculation of potencial flow about arbitrary three dimensional bodies". JoSoRo-1964o 1;. i. 67. SUDO y TANIMOTO, " A consideration of model-ship correlation on'" wake fraction" Hitachi Zosen 1968. 68. G.E.GADD, "A method for calculating the flow ovar ship hulls". RI_ NA 1969. 69. S.B.S. UBEROI, "Vis.cóus resistance of ships and ship models" Hidr© and aerodynamics laboratory. Report 13. 1969. 70. YAZAKI, "A diagram to estimate the wake fraction.for a actual ship from a model tank test", ITTC. Roma 1969. 71. L.LANDWEBER'j"Characteristics of ship boundary layers". The Sth Syin posium on Naval Hydrodynamics. Pasadena, USA 1970, 72. W.C. Webster y T.T. Huang /'Study of the boundary layer on ship forms". J . S . R 1 9 70. 73. R.GUTIÉRREZ! "Flujo potencial alrededor de un solido de revolución" Publicación de la A.I.C.N. 1971. 74. R. GUTIÉRREZ: "Contribución al estudio del coeficiente de estela y su estimación en función de los diferentes paTametros" Trabajo de la AICN, sin publicar. 75. H.E. DI CKH'AN, The interaction betwéen propeller and ship with special consideration to the influence of the wavesV Jahrbuch der Schif- fbautechnischen Gesselschaft.1939 pag.234. 76. G.WEINBLUM, "The thrust deduction" A,S.N.E,1951 p.363. 77. R.WALD, "Performance of a propeller in a wake and the interaction of propeller and hull" J.S.R.1965 p.l 78. J.L. BEVERIDGE, "Analytical prediction of thrust deduction for submersibles and surface ships" J.S.R, 1969 p,258, 79. Antunovic y Gamulin, " Correlation of model propulsión on resistan^ ce tests in towing tank of Brodárski with measurements on triáis", ITTC,Roma 1969, ; 80. LINDGRENy BSARNE, " Analysis of ship trial results including prope_ 11er thrust measurements" ITTC-1969. 81. TAKAHASHI, T.VEDA y H; OKAMOTO, "Scale effect experiment on tanker models" ITTC-1969, 82. L. MAZARREDO, " Pruebas sobre lá milla medida" I,N,1971. 83. SGHLICHTING. "Ship resistance in water of limited depth" STG.1934 p.127. 84. VAN, MANEN Y VAN LAMMEREN , " Model and ship triáis in shallow water" ISP 57 Marzo p. 127. ÍB5. H. Lackenby. "The effect of shallow water on ship speed". Ship* builder an Marine Engine-builderj)1953 p.445. 86. J.R. SCOTT "A shallow water speed corrector. RIÑA 66. pag.131. 87. ACEVEDO: "El efecto de las aguas poco profundas sobre las revoluciones del propulsor", IN.66 p.50. 88. SJOSTROM. "Effect of shallow water on speed and tiin" NEJ 67. p,271, (JASNE). 89. LoS. Artjushkov. "Wall effect co.rrection for shallow water model tests" NECIES 68/59 p.35 90. H, SIERRA. "Correlación modelo-buque". IN. 1971. p.46.