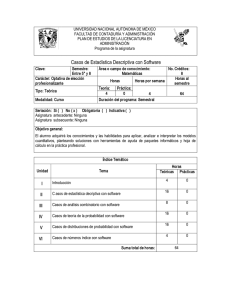
501 sección 9.1 La rigidez de la estructura matriz que incluye restringida Coordenadas En las ecuaciones. (9.1) y (9.2), CAROLINA DEL NORTE denota el número de coordenadas de estructura; PAG * representa las fuerzas conjuntas (es decir, las cargas externas conocidas y de las reacciones de apoyo desconocidas); PAG * F denota la fi fuerzas, debido a cargas miembros, cambios de temperatura, y los errores de fabricación de conjuntos jo, en los lugares, y en las direcciones, de las coordenadas de la estructura; S * representa la matriz de rigidez para las coordenadas de estructura (libre y restringido); y re * denota los desplazamientos conjuntos (es decir, los grados de libertad desconocidos y los desplazamientos conocidos correspondientes a las coordenadas restringir). La matriz de rigidez de la estructura S * y vector de fuerza fijo de articulación PAG * F se puede determinar mediante el ensamblaje de las matrices de rigidez miembro mundial K y vectores de fuerza fija-end F F, respectivamente, usando la técnica de número de código de los miembros descritos en los capítulos anteriores. La aplicación de esta técnica sigue siendo esencialmente la misma, excepto que ahora los elementos de K y F F que corresponden a las coordenadas restringidos ya no se descartan, sino que se añaden (almacenada) en sus posiciones apropiadas en S * y PAG * f. Como se indica en el párrafo anterior, las relaciones estructura de rigidez (Eq (9,1).) Contienen dos tipos de cantidades desconocidas; a saber, los desplazamientos conjuntos desconocidos y las reacciones de apoyo desconocidos. Para separar los dos tipos de incógnitas, volvemos a escribir la ecuación. (9.1) en forma de matriz de particiones: •••• PAG ndof × 1 R NR × 1 •••• - •••• PAG F •••• = •••• ndof × 1 S •••• S RF NR × ndof •••• re ndof × ndof ndof × NR RF NR × 1 S FR ndof × 1 S RR NR × NR •••• re R NR × 1 (9,3) en el cual, PAG, R, P F, S, y re denotar las mismas cantidades que en los capítulos anteriores; R F denota las fuerzas jas-fi estructura conjunta que corresponden a las coordenadas restringidas; y re R denota la apoyar vector de desplazamiento. Tenga en cuenta que la PAG F y R F vectores contienen fuerzas jos-joint estructura fi debido a las cargas miembros, cambios de temperatura, y los errores de fabricación. Los efectos de los desplazamientos de apoyo no están incluidos en PAG F y R F, pero se incorporan directamente en el análisis a través del vector soporte de desplazamiento re R. Cada elemento de la submatriz S FR en la ecuación. (9,3) representa la fuerza en un libre coordenada causado por una unidad de desplazamiento de un comedido de coordenadas. Los otros dos submatrices, S RF y S RR, puede interpretarse de una manera análoga. Multiplicando los dos matrices particionadas en el lado derecho de la ecuación. (9,3), se obtienen dos ecuaciones matriciales, PAG - PAG f = Sd + S FR re R (9.4a) R - R f = S RF d + S RR re R (9.4b) que puede reordenarse como PAG - PAG F - S FR re R = Sd R = R f + S RF (9.5a) d + S RR re R (9.5b) Copyright 2010 Cengage Learning. Todos los derechos reservados. no puede ser copiado, escaneado, o duplicado, en su totalidad o en parte. Debido a los derechos electrónicos, algunos contenidos de terceros puede ser suprimida del libro electrónico y / o capítulo electrónico (s). revisión editorial ha considerado que cualquier contenido suprimido no afecta materialmente a la experiencia de aprendizaje en general. Cengage Learning se reserva el derecho de eliminar el contenido adicional en cualquier momento si las restricciones a los derechos posteriores así lo requieran. 502 Capítulo 9 Temas y técnicas de modelado especial El procedimiento para el análisis consiste esencialmente en primera solución de la ecuación. (9.5a) para los desplazamientos conjuntos desconocidos re, y después sustituyendo re en la Ec. (9.5b) para evaluar las reacciones de apoyo R. Con re conocido, los desplazamientos Elemento de extremo y las fuerzas de extremo se pueden obtener usando los procedimientos descritos en los capítulos anteriores. En el caso de estructuras de apoyo sin desplazamientos, re R = 0, y las ecuaciones. (9.5) se reducen a (9.6A) PAG - PAG f = Sd R = R f + (9.6b) S RF re Las principales ventajas de la formulación alternativa son que los desplazamientos de apoyo se pueden incorporar en el análisis de una manera directa y sencilla, y las reacciones se pueden calcular más convenientemente mediante el uso de las relaciones de rigidez de la estructura. Sin embargo, ya que la formulación alternativa utiliza la matriz de rigidez para todas las coordenadas de la estructura, se requiere significativamente más espacio de memoria de ordenador que la formulación estándar desarrollado en los capítulos precedentes, que utiliza la matriz de rigidez para sólo las coordenadas libres de la estructura. Por esta razón, la formulación alternativa no se considera tan e fi cientes para la aplicación del ordenador como la formulación desarrollada en los capítulos anteriores [14]. La aplicación de la formulación alternativa se ilustra mediante el siguiente ejemplo. E XAMP LE 9.1 Determinar los desplazamientos conjuntos, fuerzas finales locales miembro, y las reacciones de apoyo para el bastidor plano de la Fig. 9.1 (a), debido al efecto combinado de la carga mostrada y una 125 k-ft 2 1,5 k / ft Y 9 3 1 10 pies 7 2 90 k 3 2 8 1 10 pies 1 10 pies 20 pies X 4 E, A, I = constante 6 E = 29.000 ksi A = 11.8 en. 2 I = 310 en. 4 (un cuadro 5 (B) Modelo Analítico Fig. 9.1 Copyright 2010 Cengage Learning. Todos los derechos reservados. no puede ser copiado, escaneado, o duplicado, en su totalidad o en parte. Debido a los derechos electrónicos, algunos contenidos de terceros puede ser suprimida del libro electrónico y / o capítulo electrónico (s). revisión editorial ha considerado que cualquier contenido suprimido no afecta materialmente a la experiencia de aprendizaje en general. Cengage Learning se reserva el derecho de eliminar el contenido adicional en cualquier momento si las restricciones a los derechos posteriores así lo requieran. 503 sección 9.1 La rigidez de la estructura matriz que incluye restringida Coordenadas solución de 1 pulg. del soporte izquierdo. Utilice la formulación alternativa del método de matriz de rigidez. SOLUCIÓN Este marco se analizó en el Ejemplo 6.6 para la carga externa, y en el Ejemplo 7.4 para el efecto combinado de la carga y el asentamiento de soporte, utilizando la formulación estándar. Modelo analítico: Ver Fig. 9.1 (b). En este ejemplo, se utiliza el mismo modelo analítico de la estructura tal como se utiliza anteriormente, para que las distintas matrices miembro calculado en el Ejemplo 6.6 se pueden reutilizar. El marco tiene tres grados de libertad y seis coordenadas restringidas. Por lo tanto, el número total de las coordenadas de estructura es de nueve. Rigidez de la estructura de la matriz: Al almacenar el elemento de las matrices de rigidez miembro mundial K 1 y K 2, calculado en el Ejemplo 6.6, en sus posiciones apropiadas en el 9 × matriz de rigidez 9 estructura S *, obtenemos, en unidades de kips y pulgadas, la matriz de rigidez siguiente para todos las coordenadas de estructura. 1 2 3 •••••••••••••••••• 1,685.3 507,89 507,89 1,029.2 670,08 ]= S * = [ SS FR S RF S RR 4 670,08 - 259,53 - 507,89 335,04 1,021.4 507,89 0 - 7.8038 - 936,46 74917 936,46 335,04 335,04 13,401.5 67008 - 670,08 0 67008 507,89 - 670,08 259,53 335,04 670,08 - 335,04 0 7 601,42 - 507,89 - 1,021.4 - 335,04 - 507,89 - 1,021.4 0 6 670,08 - 1,425.8 601,42 283848 - 670,08 - 259,53 - 507,89 - 670,08 - 1,425.8 5 8 9 0 0 •••••••••••••••••• 1 0 - 7.8038 936,46 2 0 - 936,46 74917 3 0 0 0 4 0 0 0 5 0 0 0 6 0 0 7 1,425.8 0 0 0 0 0 0 0 0 0 0 0 7.8038 - 936,46 8 - 936,46 149833 9 (1) Estructura fija de la Fuerza Conjunta vectorial debido a las cargas miembros: vectores de fuerza Del mismo modo, mediante el almacenamiento de los elementos del miembro de fi mundial jos de gama F F 1 y F F 2, calculado en el Ejemplo 6.6, en el 9 × 1 estructura fi ja-joint vector de fuerza PAG * f, obtenemos •••••••••••••••• •••••••••••••••• 0 1 ]= 60 2 - 750 3 0 4 PAG * f = [ PAG F 45 5 RF 1350 0 6 15 (2) 7 8 - 600 9 Conjunto de carga del vector: A partir del ejemplo 6.6, •• 0 P= 0 •• 1 2 3 (3) - 1500 Soporte de desplazamiento vectorial: Desde el modelo analítico de la estructura en la Fig. 9.1 (b), se observa que el dado 1 en. Solución del soporte izquierdo se produce en la ubicación y Copyright 2010 Cengage Learning. Todos los derechos reservados. no puede ser copiado, escaneado, o duplicado, en su totalidad o en parte. Debido a los derechos electrónicos, algunos contenidos de terceros puede ser suprimida del libro electrónico y / o capítulo electrónico (s). revisión editorial ha considerado que cualquier contenido suprimido no afecta materialmente a la experiencia de aprendizaje en general. Cengage Learning se reserva el derecho de eliminar el contenido adicional en cualquier momento si las restricciones a los derechos posteriores así lo requieran. 504 Capítulo 9 Temas y técnicas de modelado especial en la dirección de la restricción de coordenadas 5. De este modo, el vector de soporte de desplazamiento se puede expresar como ••••••••• ••••••••• 4 0 -10 5 0 6 0 7 0 8 re R = (4) 9 Los desplazamientos conjuntos: mediante la sustitución S y S FR de la ecuación. (1), PAG F de la ecuación. (2), PAG de la ecuación. (3), y re R de la ecuación. (4) en la Ec. (9.5a), escribimos las relaciones de rigidez para las coordenadas libres del bastidor puesto PAG - PAG F - S FR re R = Dakota del Sur ••• - ••• - 1500 0 ••• - ••• - 259,53 - 507,89 ••• 0 0 0 60 ••• 670,08 - 1,425.8 - 507,89 - 1,021.4 - 335,04 - 750 - 670,08 •• 1,685.3 = 67008 335,04 670,08 507,89 507,89 1,029.2 0 - 7,8038 936,46 0 - 936,46 74917 0 0 •••••••••0 •••• re 1 •• 601,42 re 2 601,42 283848 670,08 -10 0 0 ••••••••• re 3 o •• - 507,89 •• = •• 1,685.3 - 1,081.4 507,89 507,89 1,029.2 - 414,96 670,08 670,08 601,42 601,42 283848 •••• re 1 •• re 2 re 3 Al resolver estas ecuaciones, se determinan los desplazamientos conjuntos para ser ••• 0.017762 en. d= ••• 1 2 3 - 1,0599 en. (5) ans 0.00074192 rad Tenga en cuenta que estos desplazamientos conjuntos son idénticos a los calculados en el Ejemplo 7.4. El vector de desplazamiento conjunto para todas las coordenadas (libre y restringida) de la estructura se puede expresar como •••••••••••••••• •••••••••••••••• 0.017762 en. 1 - 1,0599 en. 2 0.00074192 rad 0 3 ]= re * = [ re re R 4 - 1 en. 5 0 6 0 7 0 8 0 9 (6) Copyright 2010 Cengage Learning. Todos los derechos reservados. no puede ser copiado, escaneado, o duplicado, en su totalidad o en parte. Debido a los derechos electrónicos, algunos contenidos de terceros puede ser suprimida del libro electrónico y / o capítulo electrónico (s). revisión editorial ha considerado que cualquier contenido suprimido no afecta materialmente a la experiencia de aprendizaje en general. Cengage Learning se reserva el derecho de eliminar el contenido adicional en cualquier momento si las restricciones a los derechos posteriores así lo requieran. sección 9.1 La rigidez de la estructura matriz que incluye restringida Coordenadas 505 Reacciones en el soporte: Para evaluar el vector reacción apoyo R, sustituimos S RF y S RR de la ecuación. (1), R F de la ecuación. (2), re R de la ecuación. (4), y re de la ecuación. (5) en la Ec. 9.5 (b): R = R f + S RF d + S RR re R. este rendimientos 25.316 k ••••••••• 4 ••••••••• R= 97.409 k 5 1,431.7 k-in. 6 - 25.325 k 7 22.576 k 8 - 1537 k-in. ans 9 Tenga en cuenta que estas reacciones de apoyo son los mismos que los calculados en el Ejemplo 7.4. Fuerzas miembro extremo desplazamientos y finales: miembro 1 El uso de números de código y miembro de la ecuación. (6), obtenemos ••••••••• ••••••••• v1 4 v1= ••••••••• ••••••••• ••••••••• = ••••••••• re4* 0 -10 v2 5 re5* v3 6 re6* v4 1 v5 2 re2* v6 3 re3* = 0.017762 re1* - 1.0599 0.00074192 A continuación, se utiliza la matriz de transformación miembro T 1 del Ejemplo 6.6, para calcular ••••••••• ••••••••• - 0.89443 - 0 0.44721 u1= T1 v1= - 0.94006 - 0.48988 0.00074192 Las fuerzas extremas miembro local ahora se pueden obtener mediante el uso de la matriz de rigidez local miembro k 1 y el vector de fuerza Fi fijo-end Q F 1, del Ejemplo 6.6, como ••••••••• ••••••••• 98.441 k 20.919 k 1,431.7 k-in. Q1= k1 u1+ QF1= ans - 17.943 k 19.331 k - 1,218.6 k-in. miembro 2 Los desplazamientos finales globales y locales de este miembro horizontal son ••••••••• ••••••••• v1 1 u1= v1= ••••••••• ••••••••• = ••••••••• re1* 0.017762 v2 2 re2* v3 3 re3* 0.00074192 0 0 v4 7 re7* 0 v5 8 re8* v6 9 re9* = ••••••••• - 1.0599 Copyright 2010 Cengage Learning. Todos los derechos reservados. no puede ser copiado, escaneado, o duplicado, en su totalidad o en parte. Debido a los derechos electrónicos, algunos contenidos de terceros puede ser suprimida del libro electrónico y / o capítulo electrónico (s). revisión editorial ha considerado que cualquier contenido suprimido no afecta materialmente a la experiencia de aprendizaje en general. Cengage Learning se reserva el derecho de eliminar el contenido adicional en cualquier momento si las restricciones a los derechos posteriores así lo requieran. 506 Capítulo 9 Temas y técnicas de modelado especial Mediante el uso k 2 y Q F 2 del Ejemplo 6.6, calculamos las fuerzas finales locales miembros para ser ••••••••• 25.325 k ••••••••• 7,4235 k Q2= k2 u2+ QF2= - 281,39 k-in. ans - 25.325 k 22.576 k - 1537 k-in. Como se esperaba, los vectores de fuerza extremo local miembro antecede Q 1 y Q 2 son idénticos a los calculados en el Ejemplo 7.4. 9.2 APPROXIMATE MATRIZ DE ANÁLISIS MARCOS edificio rectangular En la construcción de marcos de baja a media altura, las deformaciones axiales de los miembros son generalmente mucho más pequeños que las deformaciones de flexión. Por lo tanto, el número de grados de libertad de dichos marcos se puede reducir, sin signi fi cativamente comprometedoras la exactitud de los resultados del análisis, por descuidar las deformaciones axiales de los miembros, o suponiendo que los miembros están inextensible. En esta sección, consideramos el análisis de marcos planos rectangulares compuestos por miembros horizontales y verticales que se supone que son inextensible (es decir, no pueden ser sometidos a cualquier alargamiento axial o acortamiento). Consideremos, por ejemplo, el marco de portal se muestra en la Fig. 9.2. En el capítulo 6 que la trama en realidad tiene seis grados de libertad, cuando tanto axial re 1 re 1 re 2 2 3 3' 2' re 3 1 4 Fig. 9.2 Pórtico con elementos inextensibles (tres grados de libertad) Copyright 2010 Cengage Learning. Todos los derechos reservados. no puede ser copiado, escaneado, o duplicado, en su totalidad o en parte. Debido a los derechos electrónicos, algunos contenidos de terceros puede ser suprimida del libro electrónico y / o capítulo electrónico (s). revisión editorial ha considerado que cualquier contenido suprimido no afecta materialmente a la experiencia de aprendizaje en general. Cengage Learning se reserva el derecho de eliminar el contenido adicional en cualquier momento si las restricciones a los derechos posteriores así lo requieran. 507 sección 9.2 Matriz de Análisis aproximado de marcos rectangulares de construcción y plegado de las deformaciones de los miembros se tienen en cuenta en el análisis. Sin embargo, si los miembros del bastidor se supone que son inextensible, entonces el número de grados de libertad se reduce a sólo tres. De la forma deformada de la trama arbitrariamente cargado dado en la Fig. 9.2, podemos ver que fi ja articulaciones 1 y 4 ni puede girar ni traducir, mientras que las articulaciones 2 y 3 pueden girar y traducir en la dirección horizontal, pero no en la dirección vertical porque sus traducciones verticales se evitan las columnas izquierda y derecha, respectivamente, que se supone que son inextensibles. Además, puesto que la viga (es decir, el miembro horizontal) de la trama se supone que es inextensible, las traducciones de las articulaciones 2 y 3 horizontales deben ser iguales. Por lo tanto, el pórtico tiene tres grados de libertad, es decir, re 1, re 2, y re 3, como se muestra en la figura. Como otro ejemplo, considere el marco de la construcción de tres bahía de dos pisos se muestra en la Fig. 9.3. El marco en realidad tiene 24 grados de libertad cuando tanto deformaciones de flexión axial y se incluyen en el análisis. Sin embargo, si los miembros se supone que son inextensible, entonces el número de grados de libertad se reduce a 10, como se muestra en la figura. Como indica este ejemplo, la suposición de inextensibilidad miembro proporciona un medio para una reducción significativa en el número de grados de libertad de grandes estructuras. Ni que decir tiene, este enfoque aproximado es apropiado sólo para los marcos en los que las deformaciones del elemento axial son lo suficientemente pequeño como para tener un efecto insignificante en su respuesta. Como las deformaciones axiales en las columnas de estructuras de edificios altos pueden tener un efecto significativo en la respuesta estructural, 8 7 9 6 6 10 6 6 9 11 10 2 12 5 413 1 1 1 5 1 7 6 2 3 8 4 Fig. 9.3 Marco inextensible construcción (diez grados de libertad) Copyright 2010 Cengage Learning. Todos los derechos reservados. no puede ser copiado, escaneado, o duplicado, en su totalidad o en parte. Debido a los derechos electrónicos, algunos contenidos de terceros puede ser suprimida del libro electrónico y / o capítulo electrónico (s). revisión editorial ha considerado que cualquier contenido suprimido no afecta materialmente a la experiencia de aprendizaje en general. Cengage Learning se reserva el derecho de eliminar el contenido adicional en cualquier momento si las restricciones a los derechos posteriores así lo requieran. 508 Capítulo 9 Temas y técnicas de modelado especial El procedimiento general para el análisis aproximado de marcos planos rectangulares sigue siendo el mismo que para los marcos de plano general, desarrolladas en el Capítulo 6 proporcionan-que las relaciones miembro de rigidez son modi fi para excluir los efectos axiales. A medida que la trama se compone de sólo los miembros horizontales y verticales, cada miembro tiene ahora cuatro grados de libertad, tanto en los sistemas locales y globales de coordenadas. Las fuerzas locales y globales finales y desplazamientos finales para las vigas (es decir, miembros horizontales), y las columnas (es decir, los miembros verticales), de la trama, se dan en la Fig. 9.4. Para simplificar el análisis, el miembro local X eje está orientado positivo a la derecha para vigas (Fig. 9.4 (a)) y positivo hacia arriba para las columnas (Fig. 9.4 (b)). Con los efectos axiales descuidados, la relaciónentre themember fuerzas finales locales, Q, andenddisplacements, u, se expresa por la matriz de rigidez local k y el vector de fuerza Fi fijo-end Q F para y Q 4, u 4 ( F 4, v 4) Y Q 2, u 2 ( F 2, v 2) X X segundo mi metro Q 1, u 1 ( F 1, v 1) Q 3, u 3 ( F 3, v 3) (A) Fuerzas End viga y desplazamientos fin en Locales y globales de sistemas de coordenadas X X Q 3, u 3 Q 4, u 4 F 3, v 3 F 4, v 4 e e m m Y Y segundo X segundo Q 1, u 1 y X Q 2, u 2 (B) Fuerzas y desplazamientos Columna final End F 1, v 1 y F 2, v 2 (C) Fuerzas y desplazamientos Columna final End en el sistema de coordenadas local en el sistema de coordenadas globales Fig. 9.4 Copyright 2010 Cengage Learning. Todos los derechos reservados. no puede ser copiado, escaneado, o duplicado, en su totalidad o en parte. Debido a los derechos electrónicos, algunos contenidos de terceros puede ser suprimida del libro electrónico y / o capítulo electrónico (s). revisión editorial ha considerado que cualquier contenido suprimido no afecta materialmente a la experiencia de aprendizaje en general. Cengage Learning se reserva el derecho de eliminar el contenido adicional en cualquier momento si las restricciones a los derechos posteriores así lo requieran. 509 sección 9.2 Matriz de Análisis aproximado de marcos rectangulares de construcción elementos de viga, derivadas en el capítulo 5 (Ecs. (5.53) y (5.99)). Así, Q = Q + ku f, con •••• 12 4 L2- 6 L 6L k = EI L3 6L 6 L - 12 - 12 - 6 L 2 L2 (9,7) 12 - 6 L 2 L2- 6 L 6L •••• 4 L2 y •••• •••• FS segundo FM segundo Qf= (9,8) FS mi FM mi En cuanto a las relaciones miembro de rigidez en el sistema de coordenadas global, para vigas (Fig 9.4 (a).) No coordenadas son necesarias transformaciones; es decir, K ( viga) = k y F f ( viga) = Q F. Para las columnas, la matriz de transformación, T ( columna), se puede establecer a través de las siguientes relaciones entre las fuerzas finales locales Q y las fuerzas globales finales F ( ver Figs. 9.4 (b) y (c)): Q3= - F3 Q1= - F1Q2= F2 Q4= F4 o •••• Q 1 •••• = •••• - 1 0 Q2 Q3 1 0-1000 000 000 •••• •••• F 1 •••• F2 F3 F4 01 Q4 a partir del cual, •••• - 1 0 1 0-1000 T ( columna) = 000 000 •••• (9,9) 01 La expresión de la matriz de rigidez global para columnas, K ( columna), ahora se pueden obtener mediante la aplicación de la relación K = T T kT, cuyos rendimientos •••• 12 - 6 L - 12 - 6 L K ( columna) = EI L3 -6L - 12 -6L •••• 4 L2 6L 6L 12 2 L2 6L 2 L2 6L (9,10) 4 L2 Es importante darse cuenta de que el supuesto de despreciablemente pequeñas deformaciones axiales, como se usa en este documento, no implica que las fuerzas miembro axial también son despreciablemente pequeña. Como las fuerzas axiales no aparecen en las relaciones miembro de rigidez, la aplicación del método de matriz de rigidez produce sólo tijeras Elemento de extremo y los momentos finales. Una vez que se conocen las tijeras Elemento de extremo, las fuerzas axiales miembro pueden evaluarse considerando el equilibrio de los cuerpos libres de las articulaciones y los miembros de la estructura. Copyright 2010 Cengage Learning. Todos los derechos reservados. no puede ser copiado, escaneado, o duplicado, en su totalidad o en parte. Debido a los derechos electrónicos, algunos contenidos de terceros puede ser suprimida del libro electrónico y / o capítulo electrónico (s). revisión editorial ha considerado que cualquier contenido suprimido no afecta materialmente a la experiencia de aprendizaje en general. Cengage Learning se reserva el derecho de eliminar el contenido adicional en cualquier momento si las restricciones a los derechos posteriores así lo requieran. 510 Capítulo 9 Temas y técnicas de modelado especial E XAMP LE 9.2 Determinar los desplazamientos aproximadas conjuntas, fuerzas finales locales miembro, y el apoyo reacciones para el marco de portal se muestra en la Fig. 9.5 (a), suponiendo que los miembros a ser inextensible. SOLUCIÓN Modelo analítico: Ver Fig. 9.5 (b). El marco tiene tres grados de libertad -la traducción de la viga en el X dirección, y las rotaciones de las articulaciones 2 y 3. Las seis coordenadas restringidas del marco son identificados por los números 4 a 9 como de costumbre, como se muestra en la Fig. 9.5 (b). Estructura Matriz de rigidez y fija la fuerza conjunta del vector: Mediante la aplicación de la ecuación. (9.10) para los miembros 1 y 3, y la Ec. (9.7) para el miembro 2, se obtienen las matrices de rigidez globales siguiente miembros (en unidades de kips y pulgadas): miembro 3 - → 7 9 1 3 miembro 1 - → 4 6 1 2 •••• K1= K3= 5.3107 - 955,93 - 5.3107 - 955,93 - 955,93 229422 955,93 114711 - 5.3107 5.3107 955,93 - 955,93 114711 •••• K2= k2= k1= k3= 955,93 955,93 229422 0 5.3107 2 •••• 4 7 6 9 1 1 2 3 0 955,93 - 5.3107 3 955,93 955,93 229422 - 955,93 114711 - 5.3107 - 955,93 •••• 0 2 5.3107 - 955,93 955,93 114711 - 955,93 229422 0 (1) 3 1,65 k / ft 12 k 30 pies 30 pies E, I = constante E = 29.000 ksi I = 712 en. 4 (un cuadro Fig. 9.5 Copyright 2010 Cengage Learning. Todos los derechos reservados. no puede ser copiado, escaneado, o duplicado, en su totalidad o en parte. Debido a los derechos electrónicos, algunos contenidos de terceros puede ser suprimida del libro electrónico y / o capítulo electrónico (s). revisión editorial ha considerado que cualquier contenido suprimido no afecta materialmente a la experiencia de aprendizaje en general. Cengage Learning se reserva el derecho de eliminar el contenido adicional en cualquier momento si las restricciones a los derechos posteriores así lo requieran. 511 sección 9.2 Matriz de Análisis aproximado de marcos rectangulares de construcción Y 3 2 1 1 2 3 2 3 1 1 4 4 7 6 X 9 5 8 (B) Modelo Analítico Fig. 9.5 ( continuado) De la Fig. 9.5 (b), podemos ver que para el miembro 1, la estructura de coordenadas en las direcciones de las tijeras Elemento de extremo y momentos en los extremos están numerados 4, 6, 1, y 2. Por lo tanto, los números de código de este miembro son 4, 6, 1, 2. de manera similar, los números de código de miembro 3 son 7, 9, 1, 3. Dado que la estructura coordenadas correspondientes a las tijeras de extremo del miembro 2 no se definen (porque los correspondientes desplazamientos conjuntos son 0), utilizamos 0s para los números de código correspondientes miembro. Por lo tanto, los números de código de miembro 1 son 0, 2, 0, 3. Mediante el uso de los números de código miembro anteriores, los elementos pertinentes de K 1, K 2, y K 3 se almacenan en la 3 × matriz de rigidez 3 estructura S. Tenga en cuenta que los elementos de K 2 que se corresponden con los números de código 0 bien simplemente se ignoran. La matriz de rigidez estructura así obtenida es 1 S= 3 2 •• 10.621 955,93 955,93 •• 1 2 3 955,93 458844 114711 (2) 955,93 114711 458844 Las cizallas fi-finales fijos y los momentos debidos a la 0,1375 k / in. (= 1,65 k / ft) uniformemente carga distribuida aplicada al miembro 2 se calculan como FS b = FS e = w L 2 = 0,1375 (360) 2 FM b = - FM e = w L 2 = 24.75 k 12 = 0,1375 (360) 12 2 = 1485 k-in. Copyright 2010 Cengage Learning. Todos los derechos reservados. no puede ser copiado, escaneado, o duplicado, en su totalidad o en parte. Debido a los derechos electrónicos, algunos contenidos de terceros puede ser suprimida del libro electrónico y / o capítulo electrónico (s). revisión editorial ha considerado que cualquier contenido suprimido no afecta materialmente a la experiencia de aprendizaje en general. Cengage Learning se reserva el derecho de eliminar el contenido adicional en cualquier momento si las restricciones a los derechos posteriores así lo requieran. 512 Capítulo 9 Temas y técnicas de modelado especial 29.893 19.607 0,1375 k / in. 12 k 3 2 10.125 10.125 2 1,875 10.125 1,915.8 64.23 19.607 29.893 29.893 19.607 1,875 10.125 64.23 1,915.8 1 3 1,729.4 739,38 1,875 10.125 19.607 29.893 (c) Fuerzas miembro del extremo de Fig. 9.5 ( continuado) Usando la ecuación. (9.8), obtenemos •••• FF2= QF2= 24.75 •••• 0 1485 2 24.75 0 - 1485 (3) 3 vector de fuerza Así, la estructura fi ja-joint PAG F es dado por •• 0 1485 PAG f = •• 1 2 3 (4) - 1485 Conjunto de carga del vector: •• 12 P= 0 •• 1 2 3 (5) 0 Los desplazamientos conjuntos: Sustituyendo los valores numéricos de S ( Eq. (2)), PAG f ( Eq. (4)), y PAG ( Eq. (5)) en la relación estructura rigidez PAG - PAG f = Dakota del Sur, y resolver Copyright 2010 Cengage Learning. Todos los derechos reservados. no puede ser copiado, escaneado, o duplicado, en su totalidad o en parte. Debido a los derechos electrónicos, algunos contenidos de terceros puede ser suprimida del libro electrónico y / o capítulo electrónico (s). revisión editorial ha considerado que cualquier contenido suprimido no afecta materialmente a la experiencia de aprendizaje en general. Cengage Learning se reserva el derecho de eliminar el contenido adicional en cualquier momento si las restricciones a los derechos posteriores así lo requieran. sección 9.2 Matriz de Análisis aproximado de marcos rectangulares de construcción 513 el sistema resultante de ecuaciones simultáneas, se obtiene la siguiente desplazamientos conjuntos. •• 1,6141 en. d= •• 1 2 3 - 0.0070053 rad ans 0.001625 rad Miembro Fin Shears y Fin momentos: miembro 1 ••••• v1 v1= ••••• ••••• 4 v2 6 v3 1 v4 = 0 0 0 1.6141 re 1 2 - 0.0070053 re 2 A partir de la ecuación. (9.9): ••••• -10 000 1 000 T1= T3= ••••• ••••• = ••••• 0 ••••• (6) 0-1000 01 ••••• ••••• 0 0 u1= T1 v1= - 1.6141 - 0.0070053 Mediante el uso k 1 de la ecuación. (1) y Q F 1 = 0, obtenemos ••••• ••••• 1.875 k 739,38 k-in. Q1= k1 u1= ans - 1.875 k - 64,23 k-in. miembro 2 ••••• ••••• 0 0 - 0.0070053 0 u2= v2= 2 0 0.001625 3 Mediante el uso k 2 de la ecuación. (1) y Q F 2 de la ecuación. (3), calculamos ••••• ••••• 19.607 k 64,23 k-in. Q2= k2 u2+ QF2= 29.893 k ans - 1,915.8 k-in. miembro 3 v3= ••••• ••••• 0 7 0 9 1.6141 1 0.001625 3 Copyright 2010 Cengage Learning. Todos los derechos reservados. no puede ser copiado, escaneado, o duplicado, en su totalidad o en parte. Debido a los derechos electrónicos, algunos contenidos de terceros puede ser suprimida del libro electrónico y / o capítulo electrónico (s). revisión editorial ha considerado que cualquier contenido suprimido no afecta materialmente a la experiencia de aprendizaje en general. Cengage Learning se reserva el derecho de eliminar el contenido adicional en cualquier momento si las restricciones a los derechos posteriores así lo requieran. 514 Capítulo 9 Temas y técnicas de modelado especial ••••• ••••• 0 u3= T3 v3= 0 - 1.6141 0.001625 Utilizando k 3 de la ecuación. (1) y Q F 3 = 0, calculamos ••••• ••••• 3 de 10,125 k la ecuación. (6), obtenemos 1,729.4 k-in. Q3= k3 u3+ QF3= - 10,125 k ans conceptos básicos de la condensación de grados de libertad, y el análisis utilizando subestructuras. Utilizando T 1,915.8 k-in. Las cizallas Elemento de extremo y de extremo momentos, dada por los vectores de fuerza final locales anteriores Q 1, Q 2, y Q 3, se entonces para obtener las relaciones de rigidez para toda la estructura. En esta sección, se consideran los representan en la Fig. 9.5 (c). Fuerzas axiales de miembro: Con las tijeras finales miembro de ahora conocidos, podemos calcular las fuerzas axiales de relaciones de rigidez condensados para cada subestructura generada por separado; combinan los tres miembros de la trama mediante la aplicación de las ecuaciones de equilibrio, Σ F X = 0 y Σestos F = Y 0,se a los cuerpos libres de las articulaciones 2 y 3. las fuerzas axiales El miembro así obtenidos se muestran en la Fig. 9.5 (c). ans llamado subestructuración, en el que la estructura se divide en partes llamadas subestructuras, con las Reacciones en el soporte: Comparando las figuras. 9.5 (b) y (c), nos damos cuenta de que las fuerzas en los extremos inferiores de las columnas del marco representan sus reacciones de apoyo; es decir, - 1.875 k ••••••••• 4 19.607 k 5 ••••••••• estática). Para estructuras muy grandes, puede ser necesario combinar condensación con otro proceso 6 739,38 k-in. algunos ans R de = los grados de libertad. Este proceso se conoce como condensación ( también llamado condensación - 10,125 k 7 29.893 k 8 ecuaciones de rigidez dek-in. la estructura 9 que van a ser resuelto de forma simultánea, mediante la supresión de 1,729.4 Un enfoque comúnmente utilizado para eludir este problema es condensar ( o reducir el número de) 9.3 La equipo condensación de grados de almacenar libertad, no puede tener memoria su fi ciente para y procesar información sobre toda la estructura. Y subestructuración Un problema que puede surgir durante el análisis por ordenador de estructuras de gran tamaño es que el Copyright 2010 Cengage Learning. Todos los derechos reservados. no puede ser copiado, escaneado, o duplicado, en su totalidad o en parte. Debido a los derechos electrónicos, algunos contenidos de terceros puede ser suprimida del libro electrónico y / o capítulo electrónico (s). revisión editorial ha considerado que cualquier contenido suprimido no afecta materialmente a la experiencia de aprendizaje en general. Cengage Learning se reserva el derecho de eliminar el contenido adicional en cualquier momento si las restricciones a los derechos posteriores así lo requieran. 515 sección 9.3 La condensación de los grados de libertad, y subestructuración Condensación El objetivo de la condensación es reducir el número de grados independientes de libertad de una estructura (o subestructura, o miembro). Esto se logra mediante el tratamiento de algunos de los grados de libertad como variables dependientes y expresarlos en términos de los restantes grados de libertad independientes. La relación entre los grados dependientes e independientes de libertad es entonces sustituido en las relaciones de rigidez original para obtener un sistema condensado de ecuaciones de rigidez, que contiene sólo los grados de libertad independientes como incógnitas. Desde un punto de vista teórico, los grados de libertad dependientes pueden ser elegidos arbitrariamente. Sin embargo, para fines de cálculo, por lo general es conveniente seleccionar los grados de libertad que son internas a la estructura (o subestructura, o miembro) como los grados dependientes de libertad. Por lo tanto, grados de libertad internos; mientras que, los grados de libertad independientes se denominan grados externos de libertad. Como se discutió en los capítulos anteriores, las relaciones de rigidez para una estructura enmarcada en general se pueden expresar como (véase, por ejemplo, la Ec. (6.42)) P = Sd (9,11) P = P - PAG F (9,12) con Cuando usas el proceso de condensación, por lo general es conveniente para asignar números a los grados de libertad de manera que los grados externos e internos de libertad se separan en dos grupos. Las relaciones estructura rigidez (Ec. (9.11)) puede entonces escribirse en forma de matriz de particiones: [ PAG mi] = [ S EE S EI PAG yo ] [ re mi ] S ES DECIR S II (9,13) re yo en la que los subíndices mi y yo se refieren a cantidades relacionadas con los grados externos e internos de libertad, respectivamente. Multiplicando los dos matrices particionadas en el lado derecho de la ecuación. (9.13), obtenemos las dos ecuaciones matriciales, PAG E = S EE re E + S EI re yo (9,14) PAG I = S ES DECIR re E + S II re yo (9,15) Para expresar t que grados de libertad internos re yo en cuanto a los grados de libertad externos re MI, resolvemos la ecuación. (9.15) para re YO, como re I = S - 1II ( PAG yo - S ES DECIR re MI) (9,16) Por último, mediante la sustitución de la ecuación. (9.16) en la Ec. (9.14), se obtiene las ecuaciones de rigidez condensados PAG mi - S EI S - 1 II PAG I = ( S EE - S EI S - 1 II S ES DECIR) re mi (9,17) Copyright 2010 Cengage Learning. Todos los derechos reservados. no puede ser copiado, escaneado, o duplicado, en su totalidad o en parte. Debido a los derechos electrónicos, algunos contenidos de terceros puede ser suprimida del libro electrónico y / o capítulo electrónico (s). revisión editorial ha considerado que cualquier contenido suprimido no afecta materialmente a la experiencia de aprendizaje en general. Cengage Learning se reserva el derecho de eliminar el contenido adicional en cualquier momento si las restricciones a los derechos posteriores así lo requieran. 516 Capítulo 9 Temas y técnicas de modelado especial Tenga en cuenta que los grados de libertad externos re mi son las únicas incógnitas en la ecuación. (9,17). La ecuación (9.17) puede ser reescrita en una forma compacta como (9,18) PAG * E = S * EE re mi en el cual, PAG * E = PAG mi - S EI S - 1 II PAG yo (9,19) S * EE = S EE - S EI S - 1 (9,20) y II S ES DECIR Como las ecuaciones anteriores indican, la solución de la estructura ecuaciones de rigidez se lleva a cabo en dos partes. En la primera parte, PAG * mi y S * EE se evalúan utilizando las Ecs. (9.19) y (9.20), respectivamente, y los desplazamientos conjuntos externos re mi se determinan mediante la resolución de la ecuación. (9,18). En la segunda parte, el ahora conocidos re mi se sustituye en la ecuación. (9.16), para obtener los desplazamientos conjuntos internos re YO. Una vez que se han evaluado todos los desplazamientos conjuntos, el miembro de extremo desplazamientos y fuerzas finales, y apoyar las reacciones, se puede calcular usando los procedimientos descritos en los capítulos anteriores. Debe tenerse en cuenta que el análisis de la participación de la condensación generalmente requiere más esfuerzo computacional que la formulación estándar en el que todas las ecuaciones de rigidez de la estructura se resuelven simultáneamente. Sin embargo, la condensación proporciona un medio útil para el análisis de grandes estructuras cuyas matrices de rigidez y vectores plena carga superior a la memoria del ordenador disponible. Esto es porque, cuando se emplea la condensación, sólo partes de S y PAG necesitar ser ensamblados y procesados en la memoria del ordenador en un momento dado. El concepto básico de la condensación se ilustra mediante el siguiente ejemplo relativamente simple. E XAMP LE 9.3 Analizar el marco plano que se muestra en la Fig. 9.6 (a) el uso de la condensación, mediante el tratamiento de la rotación de la unión libre como el grado de libertad interna. SOLUCIÓN Este marco se analizó en el Ejemplo 6.6 usando la formulación estándar. los modelo analítico de la estructura se da en la Fig. 9.6 (b). Estructura condensada Matriz de rigidez: La completa (3 × 3) matriz de rigidez, S, para el marco, tal como se determina en el Ejemplo 6.6, viene dada por (en unidades de kips y pulgadas): 1 •• 1,685.3 S= 2 507,89 507,89 1,029.2 670,08 3 670,08 •• 1 2 601,42 3 (1) 601,42 283848 Copyright 2010 Cengage Learning. Todos los derechos reservados. no puede ser copiado, escaneado, o duplicado, en su totalidad o en parte. Debido a los derechos electrónicos, algunos contenidos de terceros puede ser suprimida del libro electrónico y / o capítulo electrónico (s). revisión editorial ha considerado que cualquier contenido suprimido no afecta materialmente a la experiencia de aprendizaje en general. Cengage Learning se reserva el derecho de eliminar el contenido adicional en cualquier momento si las restricciones a los derechos posteriores así lo requieran. 517 sección 9.3 La condensación de los grados de libertad, y subestructuración 125 k-ft 10 pies 1,5 k / ft 90 k 10 pies 10 pies 20 pies E, A, I = constante E = 29.000 ksi A = 11.8 en. 2 I = 310 en. 4 (un cuadro 2 Y 9 3 1 7 2 3 2 8 1 1 X 4 6 5 (B) Modelo Analítico Fig. 9.6 en el cual S se reparte para separar los grados externos de libertad, 1 y 2, a partir del grado interno de libertad, 3. A partir de la Ec. (1), obtenemos 2 1 507,89 ]12 S EE = [ 1,685.3 507,89 1,029.2 1 (2) 2 S IE = [ 670,08 601,42] 3 (3) Copyright 2010 Cengage Learning. Todos los derechos reservados. no puede ser copiado, escaneado, o duplicado, en su totalidad o en parte. Debido a los derechos electrónicos, algunos contenidos de terceros puede ser suprimida del libro electrónico y / o capítulo electrónico (s). revisión editorial ha considerado que cualquier contenido suprimido no afecta materialmente a la experiencia de aprendizaje en general. Cengage Learning se reserva el derecho de eliminar el contenido adicional en cualquier momento si las restricciones a los derechos posteriores así lo requieran. 518 Capítulo 9 Temas y técnicas de modelado especial 3 ]12 S EI = [ 670,08 (4) 601,42 3 S II = [ 283848] 3 (5) con la inversa de S II dada por ] S II- 1= [ 1 (6) 283848 Mediante la sustitución de las ecuaciones. (2), (3), (4), y (6) en la Ec. (9.20), se obtiene la matriz de rigidez de la estructura condensada: S * EE = S EE - S EI S - 1 II S IE = [ 1,683.7 506,47 506,47 1,027.9 ] parentesco. (7) Condensada de carga Conjunto de vectores: Recordemos del Ejemplo 6.6 que •• 0 - 60 P = P - PAG f = •• 1 2 3 (8) - 750 a partir del cual, ]12 PAG E = [ 0 (9) - 60 y (10) PAG I = [ - 750] 3 Sustitución o f Ecs. (4), (6), (9), y (10) en la Ec. (9.19) se obtiene el siguiente vector de carga conjunta condensada. ] PAG * E = PAG mi - S EI S - 1 II PAG I = [ 1.7705 - 58.411 k (11) Los desplazamientos conjuntos: Mediante la sustitución de las ecuaciones. (7) y (11) en la relación de rigidez estructura condensada, PAG * E = S * EE re E ( Eq. (9.18)), y la solución resultante 2 × 2 sistema de ecuaciones simultáneas, se obtiene los desplazamientos conjuntos externos (que corresponden a grados de libertad 1 y 2), como se ] 1 2 en. re E = [ 0.021302 - 0.06732 (12) El desplazamiento de junta interna (es decir, la rotación correspondiente a grado de libertad 3), puede ahora ser determinada mediante la aplicación de la ecuación. (9,16). Así, re I = S - 1II ( PAG yo - S ES DECIR re E) = [ - 0.0025499] 3 rad (13) Al combinar las ecuaciones. (12 ) y (13), se obtiene el vector completo desplazamiento conjunto, •• 1 2 •• 0.021302 en. ]= d = [d mi re yo - 0,06732 pulg. 3 ans - 0.0025499 rad Tenga en cuenta que los desplazamientos conjuntos anteriores son idénticos a los determinados en el Ejemplo 6.6 mediante la resolución de tres ecuaciones de rigidez de la estructura al mismo tiempo. Copyright 2010 Cengage Learning. Todos los derechos reservados. no puede ser copiado, escaneado, o duplicado, en su totalidad o en parte. Debido a los derechos electrónicos, algunos contenidos de terceros puede ser suprimida del libro electrónico y / o capítulo electrónico (s). revisión editorial ha considerado que cualquier contenido suprimido no afecta materialmente a la experiencia de aprendizaje en general. Cengage Learning se reserva el derecho de eliminar el contenido adicional en cualquier momento si las restricciones a los derechos posteriores así lo requieran. sección 9.3 La condensación de los grados de libertad, y subestructuración 519 Fuerzas miembro extremo desplazamientos y finales: Véase el Ejemplo 6.6. Es importante darse cuenta de que, en este ejemplo, las submatrices de S y PAG fueron obtenidos de las matrices completas correspondientes, por sólo conveniencia. En el análisis real del ordenador, para ahorrar espacio en la memoria, las partes individuales de S y PAG se ensamblan directamente de las correspondientes matrices miembro ya que se necesitan en el análisis. En los párrafos anteriores, hemos hablado de la aplicación de la condensación para reducir el número de grados independientes de libertad de una estructura completa. El proceso de condensación también se utiliza con frecuencia para establecer las relaciones de rigidez para subestructuras, que se definen como grupos de miembros con relaciones de rigidez conocidos. En este caso, la condensación se utiliza para eliminar los grados de libertad de las articulaciones que son internos a la subestructura, produciendo de este modo un sistema condensado de las relaciones de rigidez expresadas únicamente en términos de los grados de libertad de las articulaciones (externos) a través del cual la subestructura está conectado al resto de la estructura y / o soportes. El procedimiento para la condensación de los grados de libertad internos de una subestructura es análoga a la que acabamos de discutir para el caso de una estructura de conjunto. Las relaciones de rigidez que implican tanto a los grados internos y externos de libertad de una subestructura pueden expresarse simbólicamente como F = K ¯ v + FF (9,21) en el cual F una Dakotavdel repre Norte s ent, ¯ respectivamente, las fuerzas conjuntas y los desplazamientos de la subestructura; K denota la matriz subestructura rigidez; y F F representa las fuerzas jas-fi conjunta para la subestructura. La matriz K y el vector F F puede ser ensamblado a partir de las matrices miembro de rigidez y vectores de fuerza fija de extremo en la forma habitual. Para aplicar la condensación, se reescribe la ecuación. (9.21) en forma partitionedmatrix como [ F mi ] = [ K EE K EI ][¯ ] + [ FfE v mi F yo v̄ yo v K ES DECIR K II FfI ] (9,22) La multiplicación de t h e dos pag mátrico artitioned mi s en el lado derecho de la ecuación. (9.22) se obtiene de las ecuaciones de matriz F E = K EE ¯ v E + K EI ¯ v I + F f E (9,23) F I = K ES DECIR ¯ v E + (9,24) K II ¯ v I + F f I la solución de la ecuación . (9.24 )vpara YO , w ¯ mi obtener v̄ I = K - 1 v II ( F yo - F f I - K ES DECIR ¯ v MI) (9,25) y, sustituyendo la ecuación. (9.25) en la Ec. (9.23), se determina las relaciones de rigidez condensados para la subestructura para ser FE= K* EE ¯ vE+ F* fE (9,26) Copyright 2010 Cengage Learning. Todos los derechos reservados. no puede ser copiado, escaneado, o duplicado, en su totalidad o en parte. Debido a los derechos electrónicos, algunos contenidos de terceros puede ser suprimida del libro electrónico y / o capítulo electrónico (s). revisión editorial ha considerado que cualquier contenido suprimido no afecta materialmente a la experiencia de aprendizaje en general. Cengage Learning se reserva el derecho de eliminar el contenido adicional en cualquier momento si las restricciones a los derechos posteriores así lo requieran. 520 Capítulo 9 Temas y técnicas de modelado especial en el cual, K *EE = K EE - K EI K - 1 (9,27) II K ES DECIR y ( F yo - F f I F *f E = F f E + K EI K - 1 ) (9,28) II una viga mostrada en la Fig. 9.7 (a), en términos de sus grados externos de libertad solamente. La subestructura se compone de dos miembros conectados entre sí por una articulación de bisagra, como se muestra en la figura. SOLUCIÓN Modelo analítico: El modelo analítico de la subestructura se representa en la Fig. 9.7 (b). Para miembro 1, MT = 2, debido a que el final de este miembro está articulada; MT = 1 para el miembro 2, que está articulada en su comienzo. Conjunto 3 se modela como una articulación de bisagra con su rotación restringida por una abrazadera imaginario. Por lo tanto, la subestructura tiene un total de cinco grados de libertad, de los cuales cuatro son externos (identificados por los números 1 a 4) y uno es interno (fi identificado por el número 5). Subestructura Matriz de rigidez: Vamos a montar la primera completa (5 × 5) matriz de rigidez K de las matrices miembro de rigidez k, y luego aplicar la ecuación. (9.27) para determinar la matriz de rigidez condensada K * EE. W w Bisagra L2 L1 E, I = (A) Subestructura constante Y y cinco 3 1 3 1 2 1 2 sesenta 4 X 2 (B) Modelo Analítico Fig. 9.7 E XAMP LE 9.4 Determinar la matriz de rigidez y el vector de fuerza fija-conjunto para la subestructura de Copyright 2010 Cengage Learning. Todos los derechos reservados. no puede ser copiado, escaneado, o duplicado, en su totalidad o en parte. Debido a los derechos electrónicos, algunos contenidos de terceros puede ser suprimida del libro electrónico y / o capítulo electrónico (s). revisión editorial ha considerado que cualquier contenido suprimido no afecta materialmente a la experiencia de aprendizaje en general. Cengage Learning se reserva el derecho de eliminar el contenido adicional en cualquier momento si las restricciones a los derechos posteriores así lo requieran. 521 sección 9.3 La condensación de los grados de libertad, y subestructuración 1 •••••••••••••••••••• • K̄ = [ ¯ K K EE ¯ K EI ] = 3 EI 1 2 L 31 L 21 1 1 L 21 L1 0 0 • -1 L 31 4 0 0 -1 0 0 -1 ••• 1 L 32 K̄ ES DECIR ¯K K K̄ II 0-1 0 -1 5 3 1 L 21 L 31 2 L 21 •••••••• -1 L 22 -1 ••••••••••••••••• 1 -1 L 22 L 32 1 1 L2 L 22 L 32 1 1 L 22 L 31 3 4 8 •• 1 + ]=w ¯ F f = [ ¯ F fE ¯ F fI L 21 2 5 L2 3 - L 22 4 3 L1+ 3 L2 5 L 32 •••••••• 1 5 L1 5 (D) completo (no condensado) Fijo-Joint Por la fuerza del vector Subestructura (C) completa (no condensado) Stiffnes s Matriz F o Sub S t ructur mi Fig. 9.7 ( continuado) Miembro 1 ( MT = 2) Usando la ecuación. (7.18), obtenemos 1 •••• k 1 = 3 EI 2 1 L1- 1 L1 L 21 - L 1 0 - 1 - L1 L 31 0 6 5 0 0 •••• 1 2 1 0 5 0 0 6 Miembro 2 ( MT = 1) La aplicación de la ecuación. (7,15) los rendimientos •••• k 2 = 3 EI L 32 5 6 1 0-1 3 4 0 0 0 -1 0 1 - L2 L2 •••• 5 0 L20 - L2 6 3 L 22 4 El uso de los números de código de los miembros, almacenamos los elementos pertinentes de k 1 y k 2 en el total de 5 × matriz 5 rigidez K de la subestructura, como se muestra en la Fig. 9.7 (c). Sustituyendo en la ecuación. (9.27) las submatrices apropiados de K partir de la Fig. 9.7 (c) y K -II1= [ ] L 31 L 32 (1) 3 EI (L 31 + L 32) obtenemos los CONDENS ed rigidez ma Trix para la subestructura: ••••• K *EE = K EE - K EI K - 1 II K IE = 3 EI L 31 + L 32 1 L1- 1 L1 L 21 - L 1 L 1 L 2 - 1 - L1 L2L1 L2- L2 L2 1 ••••• ( 2) - L2 L 22 ans Subestructura Fijo-Joint Force Vector: Miembro 1 ( MT = 2) Usando la ecuación. (7.19), obtenemos ••••• ••••• QF1= w L1 8 5 1 L1 2 3 5 0 6 Copyright 2010 Cengage Learning. Todos los derechos reservados. no puede ser copiado, escaneado, o duplicado, en su totalidad o en parte. Debido a los derechos electrónicos, algunos contenidos de terceros puede ser suprimida del libro electrónico y / o capítulo electrónico (s). revisión editorial ha considerado que cualquier contenido suprimido no afecta materialmente a la experiencia de aprendizaje en general. Cengage Learning se reserva el derecho de eliminar el contenido adicional en cualquier momento si las restricciones a los derechos posteriores así lo requieran. 522 Capítulo 9 Temas y técnicas de modelado especial Miembro 2 ( MT = 1) Usando la ecuación. (7.16), se escribe ••••• ••••• 3 5 0 6 5 3 - L2 4 QF2= w L2 8 Los elementos pertinentes de Q F 1 y Q F 2 se almacenan en la totalidad de las 5 × vector de fuerza 1 fijada-joint F F de la subestructura, como se muestra en la Fig. 9.7 (d). Una comparación de las figuras. 9.7 (a) y (b) indica que F 5 = - W; es decir, F I = [ F 5] = [ - W] (3) Finalmente, t montón pl icación de la ecuación. (9.28) se obtiene la siguiente fijo de articulación de vector de fuerza condensada fi para la subestructura. F *f E = F f E + K EI K - 1 ••••• = II ( 5 L 41 + 8 L 1 L 32 + 3 L 42 w 8 ( L 31 + L 32) F yo - F f I) ••••• - W - L 32 - L 1 L 32 L 51 + 4 L 21 L 32 + 3 L 1 L 42 3 L 41 + 8 L 31 L 2 + 5 L 42 ••••• ( 4) ans ••••• L 31 + L 32 - ( 3 L 41 L 2 + 4 L 31 L 22 + L 52) - L 31 L 31 L 2 Utilizando el análisis Infraestructuras El procedimiento para el análisis de (grandes) estructuras, divididas en subestructuras, es esencialmente el mismo que el método rigidez estándar desarrollado en capítulos anteriores. Sin embargo, cada subestructura es tratado como un miembro ordinario de la estructura, y los grados de libertad de sólo aquellas articulaciones a través de la cual las subestructuras están conectadas entre sí y / o a los soportes se considera que son los grados de libertad de la estructura re. matriz de rigidez de la estructura S y vector de fuerza fijo de articulación PAG F, se montan, respectivamente, a partir de las matrices de rigidez subestructura K * EE y vectores de fuerza fija-conjuntos F * f E, que se expresan en términos de las coordenadas externas de sólo las subestructuras. Las ecuaciones de rigidez de la estructura, PAG PAG f = Dakota del Sur, así obtenido, a continuación, se pueden resolver para los desplazamientos conjuntos re. Consideremos, por ejemplo, el marco plano de nueve pisos se muestra en la Fig. 9.8 (a). El bastidor tiene en realidad 20 articulaciones y 54 grados de libertad; es decir, si tuviéramos que analizar el marco usando el método de rigidez estándar para marcos planos como desarrollado en el Capítulo 6, tendríamos de montar y resolver 54 estructura ecuaciones de rigidez al mismo tiempo. Ahora, supongamos que deseamos analizar el marco dividiéndolo en tres subestructuras, cada uno compuesto de tres pisos de la trama, como se representa en la Fig. 9.8 (b). Como esta figura indica, para fines de análisis, la trama se nowmodeled como tener sólo seis articulaciones, en el que las tres subestructuras están conectadas entre sí y a soportes externos. Por lo tanto, el modelo analítico de la trama tiene 12 grados de libertad y seis coordenadas restringidas. Para desarrollar la matriz de rigidez S y la fi ja-joint vector de fuerza PAG F para el marco, que primero determinamos los stiffnessmatrices subestructura K * EE y fi ja-joint Copyright 2010 Cengage Learning. Todos los derechos reservados. no puede ser copiado, escaneado, o duplicado, en su totalidad o en parte. Debido a los derechos electrónicos, algunos contenidos de terceros puede ser suprimida del libro electrónico y / o capítulo electrónico (s). revisión editorial ha considerado que cualquier contenido suprimido no afecta materialmente a la experiencia de aprendizaje en general. Cengage Learning se reserva el derecho de eliminar el contenido adicional en cualquier momento si las restricciones a los derechos posteriores así lo requieran. Y Infraestructura 1 Infraestructura 2 Infraestructura 3 2 65 4 1 2 1 3 8 12 11 97 10 4 3 13 (A) Marco Plano de nueve pisos dieciséis 15 5 X 6 18 14 17 (B) Modelo analítico del marco dividido en tres Infraestructuras Fig. 9.8 523 Copyright 2010 Cengage Learning. Todos los derechos reservados. no puede ser copiado, escaneado, o duplicado, en su totalidad o en parte. Debido a los derechos electrónicos, algunos contenidos de terceros puede ser suprimida del libro electrónico y / o capítulo electrónico (s). revisión editorial ha considerado que cualquier contenido suprimido no afecta materialmente a la experiencia de aprendizaje en general. Cengage Learning se reserva el derecho de eliminar el contenido adicional en cualquier momento si las restricciones a los derechos posteriores así lo requieran. 524 Capítulo 9 Temas y técnicas de modelado especial 2 5 6 3 4 1 1 4 3 7 2 12 9 6 5 10 11 8 Infraestructuras 2 y 3 subestructura 1 (C) grados externa de la libertad de Infraestructuras Fig. 9.8 ( continuado) vectores de fuerza F * f E, en cuanto a los grados externos de libertad de la sub- estructuras, utilizando la condensación como se describe anteriormente en esta sección. . Como se muestra en la figura 9.8 (c), la subestructura 1 tiene seis grados externos de libertad; mientras que, subestructuras 2 y 3 tienen cada uno 12 grados externos de libertad. Los elementos pertinentes de K * EE matrices y moldes F * f E vectores se almacenan en S y PAG F, respectivavamente, utilizando los números de código subestructura de la manera usual. Comparando las figuras. 9.8 (b) y (c), podemos ver que los números de código de subestructura 1 son 1, 2, 3, 4, 5, 6; mientras que, los números de código de subestructura 2 son 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12. De manera similar, para la subestructura 3, los números de código son 7, 8, 9, 10, 11, 12, 13, 14, 15, 16, 17, 18. Una vez que la matriz de rigidez de la estructura S ( 12 × 12) y la fuerza fijo de articulación de fi vector PAG f ( 12 × 1) se han montado, las ecuaciones de rigidez de la estructura, PAG - PAG f = Dakota del Sur, se resuelven para calcular el vector de desplazamiento conjunto re. Con re conocido, los desplazamientos conjuntos externos, ¯ v MI, para cada subestructura se obtienen desde re el uso de números de código de la subestructura, y luego desplazamientos internas de la junta de la subestructura, ¯ vector de desplazamiento ¯ v YO , se calculan utilizando la ecuación. (9,25). Después de la articulación v de se ha determinado una subestructura, el desplazamiento final mentos y fuerzas de sus miembros individuales, y las reacciones de apoyo, pueden ser evaluados usando el procedimiento estándar descrito en capítulos anteriores. El concepto básico de análisis utilizando subestructuras se ilustra mediante el siguiente ejemplo relativamente simple. Copyright 2010 Cengage Learning. Todos los derechos reservados. no puede ser copiado, escaneado, o duplicado, en su totalidad o en parte. Debido a los derechos electrónicos, algunos contenidos de terceros puede ser suprimida del libro electrónico y / o capítulo electrónico (s). revisión editorial ha considerado que cualquier contenido suprimido no afecta materialmente a la experiencia de aprendizaje en general. Cengage Learning se reserva el derecho de eliminar el contenido adicional en cualquier momento si las restricciones a los derechos posteriores así lo requieran. 525 sección 9.3 La condensación de los grados de libertad, y subestructuración E XAMP LE 9.5 Analizar la viga continua de dos lapso se muestra en la Fig. 9.9 (a), el tratamiento de cada tramo como una infraestructura. SOLUCIÓN Modelo analítico: La estructura se modela como estando compuesto de dos subestructuras y tres articulaciones, como se muestra en la Fig. 9.9 (b). Tiene un grado de libertad y cinco coordenadas contenida. A medida que cada subestructura se compone de dos elementos de viga conectados entre sí por una articulación de bisagra, utilizaremos las expresiones de rigideces y fuerzas jos-joint fi para tales subestructuras, derivadas en el Ejemplo 9.4, en el presente ejemplo. Estructura Matriz de rigidez, S: sustituyendo E = 70 (10 6) kN / m 2, I = 200 (10 - 6) metro 4, y L 1 = L 2 = 5 m en la ecuación. (2) del Ejemplo 9.4, se obtiene la siguiente matriz de rigidez condensada para las dos subestructuras. 50 kN 18 kN / m Bisagra 5m Bisagra 5m 5m 5m IE = constante E = 70 GPa I = 200 (10 6) mm 4 (A) Beam Y Infraestructura 1 2 Infraestructura 6 1 X 3 3 2 1 2 5 4 (B) Modelo analítico de haz divide en dos Infraestructuras Y 5 1 3 2 mi metro segundo 1 6 4 X 2 (C) Modelo Analítico de una subestructura compuesta por miembros de dos haces Fig. 9.9 Copyright 2010 Cengage Learning. Todos los derechos reservados. no puede ser copiado, escaneado, o duplicado, en su totalidad o en parte. Debido a los derechos electrónicos, algunos contenidos de terceros puede ser suprimida del libro electrónico y / o capítulo electrónico (s). revisión editorial ha considerado que cualquier contenido suprimido no afecta materialmente a la experiencia de aprendizaje en general. Cengage Learning se reserva el derecho de eliminar el contenido adicional en cualquier momento si las restricciones a los derechos posteriores así lo requieran. 18 kN / m 18 kN / m 1 75 2 15 15 35 Infraestructura 2 1 175 35 80 10 100 10 2 Infraestructura 1 275 (d) Fuerzas miembro del extremo de 50 kN 18 kN / m 1 1 75 2 175 15 2 2 35 275 3 100 80 (e) Fuerzas de la subestructura 50 kN 18 kN / m 2 3 1 75 15 275 100 115 (f) Reacciones en los soportes Fig. 9.9 ( continuado) subestructura 2 - → 4 1 5 6 subestructura 1 - → 2 3 4 1 ••••• 840 - 168 168 K *EE 1 = K * 840 840 4200 - 840 4200 EE 2 = - 168 - 840 168 - 840 840 4200 - 840 4200 ••••• 2 4 3 1 4 5 1 6 Mediante la comparación de los números de los grados externos de libertad de una subestructura (Fig. 9.9 (c)) a las de los grados de la estructura de libertad (Fig. 9.9 (b)), obtenemos números de código 2, 3, 4, 1 de subestructura 1, y 4, 1, 5, 6 para subestructura 2. Mediante la adición de los elementos pertinentes de K * EE 1 y K* EE 2, determinamos la matriz de rigidez estructura S ser 1 S = [ 8400] 1 kN · m / rad Estructura fija Joint Force Vector PAG f: subestructura 1 mediante la sustitución w = 0, W = 50 kN, y L 1 = L 2 = 5 m en la ecuación. (4) del Ejemplo 9.4, se obtiene la siguiente fi condensada fijada articulación vector de fuerza para subestructura 1. ••••• ••••• F *f E 1 = 25 2 125 3 25 4 - 125 1 526 Copyright 2010 Cengage Learning. Todos los derechos reservados. no puede ser copiado, escaneado, o duplicado, en su totalidad o en parte. Debido a los derechos electrónicos, algunos contenidos de terceros puede ser suprimida del libro electrónico y / o capítulo electrónico (s). revisión editorial ha considerado que cualquier contenido suprimido no afecta materialmente a la experiencia de aprendizaje en general. Cengage Learning se reserva el derecho de eliminar el contenido adicional en cualquier momento si las restricciones a los derechos posteriores así lo requieran. 527 sección 9.3 La condensación de los grados de libertad, y subestructuración subestructura 2 mediante la sustitución w = 18 kN / m, W = 0, y L 1 = L 2 = 5 m en la ecuación. (4) del Ejemplo 9.4, obtenemos ••••• ••••• 90 4 225 1 90 5 - 225 6 F *f E 2 = Por lo tanto, la fi ja-joint vector de fuerza para toda la estructura está dada por PAG f = [ 100] 1 kN · metro Los desplazamientos conjuntos: mediante la sustitución P = 0 y los valores numéricos de S y PAG F en la relación rigidez de la estructura, PAG - PAG f = Dakota del Sur, nosotros escribimos [ - 100] = [8400] [ re 1] a partir del cual, d = [ re 1] = [ - 0.011905] rad Subestructura conjuntas desplazamientos, y miembro del extremo de los desplazamientos y las fuerzas de extremo: subestructura 1 desplazamientos conjuntos exteriores de la subestructura ¯ v mi Puede ser obtenido simplemente comparando el grado exterior de la subestructura de los números de libertad con sus números de código, de la siguiente manera. ••••• vv̄ 1 v̄ mi 1 = v ••••• ••••• 2 vv̄ 2 3 vv̄ 3 4 vv̄ 4 1 = ••••• ••••• = ••••• 0 0 0 0 0 0 - 0.011905 re 1 desplazamientos conjuntos internos de la subestructura ahora se pueden calcular, usando la relación (Ec. vI= K-1 (9.25)) ¯ II ( F yo - F f I - K ES DECIR ¯ v MI) . La sustitución de la numéricamente valores Cal de MI, ILLINOIS 1, L 2, y W en las ecuaciones. (1) y (3) del Ejemplo 9.4 rendimientos K -II11 = [ 0.0014881] y F yo 1 = [ - 50] Del mismo modo, por sustituyendo los valores numéricos correspondientes a las expresiones de K ES DECIR y F f I dada en las figuras. 9.7 (c) y (d), respectivamente, del Ejemplo 9.4, obtenemos K yo mi 1 = [ - 336 - 1680 - 336 1680] y FfI1= 0 por substituti norte g los valores numéricos de las submatrices anteriores y subvectores en la Ec. (9.25), se determina los desplazamientos conjuntos internos para subestructura 1 para ser v̄ yo 1 = K - 1II 1 ( F yo 1 - F f I 1 - K ES DECIR 1 ¯ v v mi 1) = [ - 0.044643] Por lo tanto, la completa j oint re isplac mi ción v mi ctor para subestructura 1 es ••••••• ••••••• 1 0 ]= v̄ 1 = [ ¯ v v mi 1 v̄ yo 1 v 0 2 0 3 - 0.011905 rad 4 - 0.044643 m 5 ans Copyright 2010 Cengage Learning. Todos los derechos reservados. no puede ser copiado, escaneado, o duplicado, en su totalidad o en parte. Debido a los derechos electrónicos, algunos contenidos de terceros puede ser suprimida del libro electrónico y / o capítulo electrónico (s). revisión editorial ha considerado que cualquier contenido suprimido no afecta materialmente a la experiencia de aprendizaje en general. Cengage Learning se reserva el derecho de eliminar el contenido adicional en cualquier momento si las restricciones a los derechos posteriores así lo requieran. 528 Capítulo 9 Temas y técnicas de modelado especial Con los desplazamientos de todas las articulaciones de la subestructura 1 ahora se conoce, se pueden determinar los desplazamientos finales u, y las fuerzas de gama Q, para sus dos miembros (Fig. 9.9 (c)) en la forma usual. Miembro 1 ( MT = 2) De la Fig. 9.9 (c), podemos ver que los números de código de miembro 1 son 1, 2, 5, 6. Así, ••••• u1 u1= ••••• ••••• u2 2 u3 5 u4 6 0 0 = ••••• ••••• = ••••• 0 1 0 vv̄ 5 - 0.044643 0 0 Sustituyendo los valores numéricos de mi y yo y L = 5 m en la ecuación. (7.18), se obtiene la matriz de miembro de rigidez, •••• 8400 - 1680 0 1, 680 k1= •••• 1680 - 336 0 336 - 336 - 1680 336 0 0 00 0 La sustitución de k 1 y Q F 1 = 0 en la relación miembro de rigidez, Q = Q + ku F, se obtienen las siguientes fuerzas finales para miembro 1 de la subestructura 1. ••••• ••••• 15 kN 75 kN · metro Q1= k1 u1+ QF1= ans - 15 kN 0 Miembro 2 ( MT = 1) ••••• ••••• - 0.044643 0 0 5 6 u2= 3 - 0.011905 4 La aplicación de la ecuación. (7.15), ••••• 336 0 - 336 00 k2= 0 0 - 336 0 336 - 1680 1680 0 - 1680 QF2= 0 ••••• 1680 8400 ••••• - 35 kN ••••• 0 35 Q2= k2 u2+ QF2= ans kN - 175 kN · metro subestructura 2 ••••• ••••• 0 v̄ mi 2 = v - 0.011905 0 0 4 1 5 6 De la Fig. 9.7 (d) del Ejemplo 9.4, obtenemos F f I 2 = [ 67.5] Copyright 2010 Cengage Learning. Todos los derechos reservados. no puede ser copiado, escaneado, o duplicado, en su totalidad o en parte. Debido a los derechos electrónicos, algunos contenidos de terceros puede ser suprimida del libro electrónico y / o capítulo electrónico (s). revisión editorial ha considerado que cualquier contenido suprimido no afecta materialmente a la experiencia de aprendizaje en general. Cengage Learning se reserva el derecho de eliminar el contenido adicional en cualquier momento si las restricciones a los derechos posteriores así lo requieran. sección 9.3 La condensación de los grados de libertad, y subestructuración las submatrices K - 1 II y 529 K ES DECIR siendo el mismo que para la subestructura 1, y F yo 2 = 0. Por lo tanto, la aplicación de la ecuación. (9.25) los rendimientos v̄ yo 2 = [ - 0,13021] v y por lo tanto, ••••••• ]= v̄ 2 = [ ¯ v ••••••• 1 0 - 0.011905 0 0 rad v mi 2 2 3 v̄ yo 2 v ans 4 - 0,13021 m 5 Miembro 1 ( MT = 2) ••••• ••••• 0 u1= 1 - 0.011905 2 - 0 0.13021 5 6 los k matriz para el miembro 1 de la subestructura 2 es el mismo que para el miembro correspondiente de la subestructura 1. Utilizando la ecuación. (7.19), calculamos ••••• ••••• 56.25 56.25 QF1= 33.75 0 Así, ••••• ••••• 80 kN 175 kN · m 10 Q1= k1 u1+ QF1= Miembro 2 ( MT = 1) ••••• ••••• - 0,13021 0 0 u2= ans kN 0 0 5 6 3 4 los k matriz para este miembro es el mismo que para el miembro 2 de la subestructura 1. La aplicación de la ecuación. (7.16), ••••• ••••• 33.75 0 QF2= 56.25 - 56.25 Así, ••••• Q2= k2 u2+ QF2= - 10 kN ••••• 0 100 kN ans - 275 kN · metro Las fuerzas finales para los miembros individuales de la estructura se muestran en la Fig. 9.9 (d). Copyright 2010 Cengage Learning. Todos los derechos reservados. no puede ser copiado, escaneado, o duplicado, en su totalidad o en parte. Debido a los derechos electrónicos, algunos contenidos de terceros puede ser suprimida del libro electrónico y / o capítulo electrónico (s). revisión editorial ha considerado que cualquier contenido suprimido no afecta materialmente a la experiencia de aprendizaje en general. Cengage Learning se reserva el derecho de eliminar el contenido adicional en cualquier momento si las restricciones a los derechos posteriores así lo requieran. 530 Capítulo 9 Temas y técnicas de modelado especial Reacciones en el soporte: El vector de reacción R puede ser montado o bien directamente a partir de los vectores de fuerza finales miembro Q, o a partir de los vectores de fuerza conjuntos externos, F E, de las subestructuras. Para utilizar esta última opción, primero aplicamos la ecuación. (9.26) para calcular F E. Por lo tanto, mediante la sustitución de la previamente calculada valores numéricos de K * EE, F* f E, y¯ v mi dentro Eq. (9.26), obtenemos ••••• ••••• F mi 1 = K * v mi 1 + F * EE 1 ¯ 15 2 75 3 35 4 - 175 1 fE1= y ••••• ••••• F mi 2 = K * v mi 2 + F * EE 2 ¯ 80 4 175 1 100 5 - 275 6 fE2= Las fuerzas anterior subestructura se representan en la Fig. 9.9 (e). Por último, se calcula el vector de la reacción de apoyo R mediante el almacenamiento de los elementos pertinentes de F mi 1 y F mi 2 en sus posiciones correctas en R, utilizando los números de código subestructura. Este rendimientos, ••••••• R= 15 kN 75 ••••••• 2 kN · m 115 3 kN 100 kN 4 ans 5 - 275 kN · metro 6 Las reacciones de apoyo se muestran en la Fig. 9.9 (f). 9.4 SOPORTES rodillos oblicuos Las estructuras que hemos considerado hasta ahora en este texto se han apoyado de tal manera que los desplazamientos conjuntos impedido por los soportes están en las direcciones de los ejes de coordenadas globales orientados en las direcciones horizontal y vertical. Debido a que un soporte de rodillos inclinada impide la traducción de una articulación en una dirección inclinada (normal a la pendiente), al tiempo que permite la traducción en la dirección perpendicular, que ejerce una fuerza de reacción sobre la articulación en que inclinado, no global, dirección. Por lo tanto, el efecto de un soporte de rodillos inclinada no puede ser incluido en el análisis por la simple eliminación de uno de los grados de libertad de la estructura; es decir, mediante el tratamiento de una de las coordenadas de la estructura, que se definen en las direcciones de los ejes de coordenadas global, como un comedido de coordenadas. Un enfoque obvio para aliviar este problemwould sea para orientar el sistema de coordenadas global, de modo que sus ejes son paralelos y perpendiculares al plano inclinado sobre el cual el rodillo se mueve. Sin embargo, este enfoque generalmente demuestra ser bastante engorroso, ya que requiere que las coordenadas y las cargas de las articulaciones, que son generalmente especificados en las direcciones horizontal y vertical, se calculan con respecto a la inclinado sistema global de coordenadas. Además, la anterior Copyright 2010 Cengage Learning. Todos los derechos reservados. no puede ser copiado, escaneado, o duplicado, en su totalidad o en parte. Debido a los derechos electrónicos, algunos contenidos de terceros puede ser suprimida del libro electrónico y / o capítulo electrónico (s). revisión editorial ha considerado que cualquier contenido suprimido no afecta materialmente a la experiencia de aprendizaje en general. Cengage Learning se reserva el derecho de eliminar el contenido adicional en cualquier momento si las restricciones a los derechos posteriores así lo requieran. sección 9.4 531 Apoyos de rodillos inclinados enfoque no se puede utilizar si la estructura está soportada por dos o más rodillos inclinados en direcciones diferentes (es decir, ni paralelas ni perpendiculares). Una solución teóricamente exacta del problema de rodillos inclinados generalmente implica primero de fi nir la fuerza de reacción y los desplazamientos de apoyo con referencia a una locales conjunta sistema de coordenadas, con ejes paralelos y perpendiculares a la pendiente; y luego la introducción de estas condiciones de retención en las relaciones de rigidez global de la estructura a través de una matriz de transformación especial [26]. Si bien este enfoque es exacto en el sentido de que se produce exactamente 0 desplazamiento de la articulación de soporte perpendicular a la pendiente, en general no se considera que es el más conveniente debido a que su implementación computacional requiere una cantidad significativa de esfuerzo de programación. Quizá la técnica más conveniente y de uso común para el modelado de un soporte del rodillo inclinado es para reemplazarlo con un miembro de la fuerza axial imaginaria con muy grande la rigidez axial, y orientado en la dirección perpendicular a la inclinación, como se muestra en las Figs. 9,10 y 9,11 (en la página siguiente). Como se muestra allí, un extremo del miembro de imaginario está conectado a la articulación de soporte original por una conexión articulada, mientras que el otro extremo está unido a un soporte de bisagra imaginario, para asegurar que sólo la fuerza axial (es decir, ningún momento de flexión) se desarrolla en el miembro cuando se carga la estructura. Para que el miembro imaginario para representar con precisión el efecto del soporte de rodillos, su rigidez axial se debe hacer en su fi cientemente grande para que su deformación axial es despreciablemente pequeña. θ (A) Plano braguero con la ayuda de rodillos oblicuos θ miembro imaginario con gran área de sección transversal (B) Modelo Analítico Fig. 9.10 Copyright 2010 Cengage Learning. Todos los derechos reservados. no puede ser copiado, escaneado, o duplicado, en su totalidad o en parte. Debido a los derechos electrónicos, algunos contenidos de terceros puede ser suprimida del libro electrónico y / o capítulo electrónico (s). revisión editorial ha considerado que cualquier contenido suprimido no afecta materialmente a la experiencia de aprendizaje en general. Cengage Learning se reserva el derecho de eliminar el contenido adicional en cualquier momento si las restricciones a los derechos posteriores así lo requieran. 532 Capítulo 9 Temas y técnicas de modelado especial θ (A) Marco de avión con la ayuda de rodillos oblicuos θ miembro Imaginario, articulada en ambos extremos ( MT = 3), y con una gran área de sección transversal (B) Modelo Analítico Fig. 9.11 el miembro imaginario en el análisis, mientras que mantiene su longitud del mismo orden de magnitud que los otros miembros estructurales (reales), para asegurar que el miembro imaginario sufre solamente pequeñas rotaciones. Siempre que las condiciones anteriores son satisfechas, la fuerza axial en el miembro imaginario representa la reacción del apoyo real rodillo inclinado. La principal ventaja de modelar rodillo inclinado apoya con miembros imaginarios es que los programas de ordenador para soportes estándar, tales como los desarrollados en los capítulos anteriores, se pueden utilizar, sin ningún tipo de cationes modificadores, para analizar estructuras apoyadas en los rodillos inclinados. Al analizar armazones, elementos de refuerzo ordinarias con áreas de sección transversal de gran tamaño pueden ser usados para modelar soportes de rodillos inclinados (Fig. 9.10). En el caso de marcos, sin embargo, themembers utilizan tomodel rodillos inclinados, además de tener áreas de sección transversal grande, debe ser de tipo 3 ( MT = 3); es decir, theymust ser articulada en ambos extremos, como se muestra en la Fig. 9.11. Como se ha señalado antes, el área de sección transversal del miembro imaginario, que se utiliza para modelar el soporte del rodillo inclinado, debe ser su fi cientemente grande para que las deformaciones axiales del miembro son despreciablemente pequeña. Sin embargo, utilizando un valor extremadamente grande para el área de la sección transversal de la imaginarymember puede causar algunos elementos fuera de la diagonal de la matriz de rigidez de la estructura a ser tan grande, en comparación con los demás elementos, que introducen errores numéricos, o causar inestabilidad numérica , durante la solución de las ecuaciones de rigidez de la estructura. Copyright 2010 Cengage Learning. Todos los derechos reservados. no puede ser copiado, escaneado, o duplicado, en su totalidad o en parte. Debido a los derechos electrónicos, algunos contenidos de terceros puede ser suprimida del libro electrónico y / o capítulo electrónico (s). revisión editorial ha considerado que cualquier contenido suprimido no afecta materialmente a la experiencia de aprendizaje en general. Cengage Learning se reserva el derecho de eliminar el contenido adicional en cualquier momento si las restricciones a los derechos posteriores así lo requieran. sección 9.5 Conexiones de offset 533 9.5 CONEXIONES OFFSET En la formulación del método rigidez de análisis, hemos ignorado el tamaño de juntas o conexiones, suponiendo que sean de tamaño infinitesimal. Si bien esta suposición demuestra ser adecuada para estructuras más enmarcadas, las dimensiones de las conexiones resistentes a momento en algunas estructuras pueden ser lo suficientemente grande, en relación con longitudes miembros, que ignorar su efecto en el análisis puede conducir a resultados erróneos. En esta sección, discutimos procedimientos para incluir el efecto de tamaños finito de conexiones o articulaciones en el análisis. Considere una viga arbitraria de un marco de edificio típico plano, como se muestra en la Fig. 9.12 (a) en la página siguiente. La viga está conectado en sus extremos, a las columnas y vigas adyacentes, por medio de conexiones rígidas o resistentes a momento. Como se indica en la figura, las dimensiones de las conexiones por lo general (pero no siempre) igual las profundidades de sección transversal de los miembros conectados. Si las dimensiones de conexión son pequeñas, en comparación con las longitudes de miembro, entonces su efecto se ignora en el análisis. En tal caso, sería suponer para fines de análisis que la viga bajo consideración se extiende en longitud desde un línea central columna a la siguiente, y está conectado por sus extremos a otros miembros a través de conexiones rígidas de tamaño infinitesimal, como se representa en la Fig. 9.12 (segundo). Sin embargo, si las dimensiones de conexión no son pequeñas, a continuación, su efecto se debe considerar en el análisis. Como se muestra en la Fig. 9.12 (c), las conexiones rígidas de tamaño finito pueden ser convenientemente modeladas utilizando rígido compensaciones, con cada desplazamiento de ser un cuerpo rígido de longitud igual a la distancia entre el centro de la conexión y su borde que es adyacente al elemento bajo consideración. Por lo tanto, a partir de la Fig. 9.12 (c), podemos ver que la viga bajo consideración ha compensado conexiones de longitudes re segundo y re mi en sus extremos izquierdo y derecho, respectivamente. Dos enfoques se utilizan comúnmente para incluir el efecto de las conexiones de desplazamiento en el análisis. En el enfoque primero, cada desplazamiento se trata como un pequeño miembro con muy grande la rigidez. Por ejemplo, en [13] se sugiere que las propiedades transversales de un miembro de desplazamiento de elegirse de modo que su rigidez es de 1.000 veces mayor que la del miembro conectado. La principal ventaja de este enfoque es que los programas de ordenador, tales como las desarrolladas en los capítulos anteriores, se pueden utilizar sin ninguna modi fi cación. La desventaja de este enfoque es que cada compensar los aumentos, por uno, el número de miembros y las articulaciones a analizar. Por ejemplo, la viga de la Fig. 9.12 (c) tendría que ser dividido en tres miembros de longitudes re segundo, L, y re mi, con el fin de incluir el efecto de conexiones de desplazamiento en sus dos extremos en el análisis. Un enfoque alternativo que se puede utilizar para manejar el efecto de las conexiones de compensación implica modificar las relaciones miembro de rigidez para incluir el efecto de las compensaciones en extremos miembros. La principal ventaja de este enfoque es que un miembro natural (por ejemplo, una viga o una columna), junto con sus compensaciones finales, puede ser tratado como un único elemento con el propósito de análisis. Por ejemplo, toda la viga de la Fig. 9.12 (c), incluyendo sus compensaciones finales, sería tratado como un único miembro cuando se utiliza este enfoque. Sin embargo, la desventaja de este método es que requiere reescritura de algunas partes de los programas informáticos desarrollados en los capítulos anteriores. Copyright 2010 Cengage Learning. Todos los derechos reservados. no puede ser copiado, escaneado, o duplicado, en su totalidad o en parte. Debido a los derechos electrónicos, algunos contenidos de terceros puede ser suprimida del libro electrónico y / o capítulo electrónico (s). revisión editorial ha considerado que cualquier contenido suprimido no afecta materialmente a la experiencia de aprendizaje en general. Cengage Learning se reserva el derecho de eliminar el contenido adicional en cualquier momento si las restricciones a los derechos posteriores así lo requieran. Líneas centrales de columna Conexiones rígidas re segundo L re mi (A) Viga L + d segundo + re mi (B) El descuido Modelo analítico Tamaño de las conexiones Las compensaciones rígidos re segundo L re mi (C) Modelo analítico Considerando Tamaño de las conexiones Fig. 9.12 534 Copyright 2010 Cengage Learning. Todos los derechos reservados. no puede ser copiado, escaneado, o duplicado, en su totalidad o en parte. Debido a los derechos electrónicos, algunos contenidos de terceros puede ser suprimida del libro electrónico y / o capítulo electrónico (s). revisión editorial ha considerado que cualquier contenido suprimido no afecta materialmente a la experiencia de aprendizaje en general. Cengage Learning se reserva el derecho de eliminar el contenido adicional en cualquier momento si las restricciones a los derechos posteriores así lo requieran. 535 sección 9.5 Conexiones de offset A continuación, modificamos las relaciones de rigidez de los miembros de marcos planos para incluir el efecto de las compensaciones finales rígidos. Procedimientos similares se pueden emplear para derivar relaciones de rigidez fi modi para los miembros de otros tipos de estructuras enmarcadas. Considere un miembro arbitraria de longitud L de un bastidor de avión, y dejar Q y ū denotar la fuerzas finales y desplazamientos extremo local, respectivamente, en los extremos exteriores de sus u desplazamientos, como se muestra en la Fig. 9.13 (a). Nuestro objetivo es expresar Q en términos de ¯ u y cualquier carga externa aplicada al miembro entre sus extremos reales segundo y mi. En el capítulo 6 que la relación entre las fuerzas de gama Q y el desplazamiento final u, que se definen en los extremos segundo y mi del miembro, es de la forma Q = Q + ku F, con k y Q F dada por las ecuaciones. (6.6) y (6.15), respectivamente. Para expresar Q en términos de Q, tenemos en cuenta el equilibrio de los cuerpos rígidos de los dos desplazamientos. Este rendimientos (ver Fig. 9.13 (b)) Q1= Q1 Q2= Q2 Q 3 = re segundo Q 2 + Q 3 Q4= Q4 Q5= Q5 Q 6 = - re mi Q 5 + Q 6 que puede b mi escrito en m a forma RIX como Q = TQ (9,29) y rígida compensado rígida compensado ¯Q¯6, u 6 ¯Q¯4, u 4 ¯Q¯1, u 1 m segundo ¯Q¯3, u 3 X mi ¯Q¯5, u 5 ¯Q¯2, u 2 L re segundo re mi E, I, A = constante (A) miembro del marco Plano con compensaciones extremo rígido Q5 Q2 Q6 Q6 ¯Q 1 Q3 ¯Q 3 ¯Q 2 ¯Q 6 ¯Q 4 Q4 Q1 segundo Q3 metro Q2 mi ¯Q 5 Q5 re segundo re mi (b) Los miembros de las Fuerzas Fig. 9.13 Copyright 2010 Cengage Learning. Todos los derechos reservados. no puede ser copiado, escaneado, o duplicado, en su totalidad o en parte. Debido a los derechos electrónicos, algunos contenidos de terceros puede ser suprimida del libro electrónico y / o capítulo electrónico (s). revisión editorial ha considerado que cualquier contenido suprimido no afecta materialmente a la experiencia de aprendizaje en general. Cengage Learning se reserva el derecho de eliminar el contenido adicional en cualquier momento si las restricciones a los derechos posteriores así lo requieran. 536 Capítulo 9 Temas y técnicas de modelado especial con •••••••• 1000 0100 00 00 00 00 0 re segundo 1 0 T= 0001 0000 0 0 0 0 - re mi 1 •••••••• (9,30) 10 en el cual T puede ser considerado como una matriz de transformación que se traduce fuerzas de extremo de los miembros de sus extremos reales segundo y mi, a los extremos exteriores de sus desplazamientos rígidos. A partir de consideraciones geométricas, se puede demostrar que la relación entre los desplazamientos de gama u y ¯ u Se puede escribir como (9,31) u = TT¯ u Mediante la sustitución de la ecuación. (9.31) en la Ec. (6.4), y sustituyendo la expresión resultante en la Ec. (9.29), obtenemos la relación rigidez deseada: Q=¯ku ū ¯ + QF (9,32) k̄ = TKT T k (9,33) con Q f = TQ F (9,34) en el cual ¯ k y Q F representar la matriz de rigidez miembro ed modi fi y la fuerza xedend fi vector, respectivamente, en el sistema de coordenadas local. Tenga en cuenta que ¯ ky Q F incluir el efecto de las compensaciones rígidos en los extremos del miembro. Las formas explícitas de ¯ k y Q f, respectivamente, se pueden obtener mediante la sustitución de las ecuaciones. (6.6) y (9.30) en la Ec. (9,33), y las ecuaciones. (6.15) y (9.30) en la Ec. (9,34). Estos se dan en las ecuaciones. (9.35) y (9.36). •••••••••••••••• Alabama 2 0 0 - Alabama 2 yo 0 0 0 12 ( 6 L + 12 re segundo) 0 - 12 ( 6 L + 12 re mi) 0 ( 6 L + 12 re segundo) - Alabama 2 yo 0 0 - 12 yo k̄ = EI k L3 •••••••••••••••• 0 ( 4 L 2 + 12 ld b + 12 re 2 b) 0 ( - 6 L - 12 re segundo) ( 6 L + 12 re e) ( 2 L 2 + 6 ld b + 6 ld e + 12 re segundo re mi) 0 Alabama 2 yo ( - 6 L - 12 re b) ( 2 L 2 + 6 ld b + 6 ld e + 12 re segundo re mi) 0 0 12 0 ( - 6 L - 12 re mi) 0 ( - 6 L - 12 re mi) ( 4 L 2 + 12 ld e + 12 re 2 e) (9,35) Copyright 2010 Cengage Learning. Todos los derechos reservados. no puede ser copiado, escaneado, o duplicado, en su totalidad o en parte. Debido a los derechos electrónicos, algunos contenidos de terceros puede ser suprimida del libro electrónico y / o capítulo electrónico (s). revisión editorial ha considerado que cualquier contenido suprimido no afecta materialmente a la experiencia de aprendizaje en general. Cengage Learning se reserva el derecho de eliminar el contenido adicional en cualquier momento si las restricciones a los derechos posteriores así lo requieran. 537 sección 9.6 Conexiones semirrígidas ••••••• FA segundo ••••••• FS segundo re segundo FS b + FM segundo Qf= FA mi (9,36) FS mi - re mi FS e + FM mi El procedimiento para el análisis esencialmente sigue siendo el mismo que desarrollado previamente, excepto que las expresiones modi fi cados para las matrices de rigidez ¯ k (Ec. (9.35)) y fi vectores de fuerza de gama fijada Q f ( Eq. (9.36)) se utilizan (en lugar de k y Q F, respectivamente), para miembros con conexiones de compensación. 9.6 CONEXIONES semirrígidos Aunque rígida y articulada tipos de conexiones, como considerado hasta ahora en este texto, son los más comúnmente utilizados en los diseños estructurales, un tercer tipo de conexión, denominada conexión semi-rígido, También es reconocido por algunos códigos de diseño, y se puede utilizar para el diseño de estructuras tales como estructuras de edificios de acero estructural. Recordemos que la rotación de un extremo del elemento conectado rígidamente es igual a la rotación de la articulación adyacente, mientras que la rotación de un extremo articulado de un miembro debe ser tal que el momento en el extremo articulado es 0. Se considera que una conexión que se semirrígido si su la restricción de rotación es menor que la de una conexión rígida a la perfección, pero más que la de una conexión articulada sin fricción. En otras palabras, el momento transmitida por una conexión semi-rígido es mayor que 0, pero menor que la transmitida por una conexión rígida. Para el propósito de análisis, una conexión semirrígido puede ser convenientemente modelado por un muelle de giro (torsional) con una rigidez igual a la de la conexión real. En esta sección, derivamos las relaciones de rigidez para los miembros de vigas con conexiones semirrígidas en sus extremos. Tales relaciones para otros tipos de estructuras enmarcadas se pueden determinar mediante el uso de un procedimiento similar. Considere un miembro arbitraria de una viga, como se muestra en la Fig. 9.14 (a) en la página siguiente. El miembro está conectado a las articulaciones adyacentes a sus extremos segundo y mi, por medio de muelles de rotación de en fi tamaño infinitesimal que representan las conexiones semirrígidas de rigideces k segundo y k mi, respectivamente. Como se muestra en esta figura, Qy¯ u representan las fuerzas finales y desplazamientos extremo local, respectivamente, en los extremos exteriores de los muelles de rotación. Nuestro objetivo es expresar Q en términos de ¯ u y cualquier carga externa aplicada al miembro. Comenzamos por escrito, en forma explícita, la relación previamente derivados Q = Q + ku F, entre las fuerzas de gama Q y los desplazamientos finales u, los cuales se definen en los extremos reales segundo y mi del miembro. Mediante el uso de las expresiones para k y Q F partir de las ecuaciones. (5.53) y (5.99), respectivamente, se escribe •••• Q 1 •••• = EI Q2 Q3 Q4 •••• 12 6L L3 6L 6 L - 12 4 L2- 6 L - 12 - 6 L 6L 2 L2 12 - 6 L 2 L2- 6 L 4 L2 •••• •••• u 1 •••• + •••• FS segundo •••• u2 FM segundo u3 FS mi u4 FM mi (9,37) Copyright 2010 Cengage Learning. Todos los derechos reservados. no puede ser copiado, escaneado, o duplicado, en su totalidad o en parte. Debido a los derechos electrónicos, algunos contenidos de terceros puede ser suprimida del libro electrónico y / o capítulo electrónico (s). revisión editorial ha considerado que cualquier contenido suprimido no afecta materialmente a la experiencia de aprendizaje en general. Cengage Learning se reserva el derecho de eliminar el contenido adicional en cualquier momento si las restricciones a los derechos posteriores así lo requieran. y muelle rotacional de la rigidez k muelle rotacional de la rigidez k mi segundo ¯Q¯4, u 4 X ¯Q¯2, u 2 metro segundo mi ¯Q¯3, u 3 ¯Q¯1, u 1 L E, I = constante Infinitesimal Infinitesimal (A) Rayo miembro con conexiones semirrígidas Q3 Q1 kb ¯Q 2 Q2 ¯Q 1 metro segundo Q2 ¯Q 4 Q4 Q4 mi ke ¯Q 3 Q3 Q1 (b) Los miembros de las Fuerzas y ¯u 4 posición desplazada u4 ' u2 y desayuno ' u3 ¯u 3 ¯u 2 u1 ¯u 1 Posición inicial k segundo k mi X cama metro ee L Infinitesimales (c) Desplazamientos miembros Fig. 9.14 538 Copyright 2010 Cengage Learning. Todos los derechos reservados. no puede ser copiado, escaneado, o duplicado, en su totalidad o en parte. Debido a los derechos electrónicos, algunos contenidos de terceros puede ser suprimida del libro electrónico y / o capítulo electrónico (s). revisión editorial ha considerado que cualquier contenido suprimido no afecta materialmente a la experiencia de aprendizaje en general. Cengage Learning se reserva el derecho de eliminar el contenido adicional en cualquier momento si las restricciones a los derechos posteriores así lo requieran. 539 sección 9.6 Conexiones semirrígidas Figura 9.14 (b) muestra las fuerzas Q y Q actuando en los extremos exterior e interior, respectivamente, de los resortes de rotación del miembro. A medida que las longitudes de estas fuentes están en infinitesimal, ecuaciones de equilibrio para los cuerpos libres de los resortes ceden (9,38) Q=Q los desplazamientos u y ¯ u se representan en la Fig. 9.14 (c) usando un exagger- ado escala. Debido al tamaño infinitesimal en fi de los muelles, las traducciones de los extremos del resorte son iguales; es decir, u1= ¯ u1 (9.39a) u3= ¯ u3 (9.39b) La relación entre las rotaciones ( u 2 y ¯ u 2) de los dos extremos de la primavera, en el extremo miembro segundo, se puede establecer mediante la aplicación de la relación rigidez del resorte: Q 2 = k b ( ¯ u 2 - u 2) a partir del cual, u2= ¯ u2- Q2 (9.39c) k segundo Similarly, by using the stiffness relation for the spring attached to member end e, we obtain u4= ¯ u4− Q4 (9.39d) ke u, we now substitute To obtain the desired relationship between Q and ¯ Eqs. (9.38) and (9.39) into Eq. (9.37) to obtain the following equations. [ Q1= E I 12 ¯u 1 + L3 6L [ Q2= E I 4 L2 Q3= E I u1− 6 L L3 [ Q4= E I L3 2 L2 u2− Q2 kb u3+ 6 L u4− Q4 ke ) (¯ −6L¯u3+ 2 L2 + 12 ¯u 3 − 6 L ) (9. 40b) ) ] + FS e u4− Q4 ke (¯ −6L¯u3+ 4 L2 (9.40a) ) ] + FM b u4− Q4 ke (¯ ) u2− Q2 kb (¯ 6 L ¯u 1 + − 12 ¯ u2− Q2 kb (¯ [ − 12 ¯ ) ] + FS b (¯ u2− Q2 kb (¯ 6 L ¯u 1 + L3 ) (¯ ( 9.40c) ) ] + FM e u4− Q4 ke (9. 40d) Copyright 2010 Cengage Learning. All Rights Reserved. May not be copied, scanned, or duplicated, in whole or in part. Due to electronic rights, some third party content may be suppressed from the eBook and/or eChapter(s). Editorial review has deemed that any suppressed content does not materially affect the overall learning experience. Cengage Learning reserves the right to remove additional content at any time if subsequent rights restrictions require it. 540 Chapter 9 Special Topics and Modeling Techniques Next, we solve Eqs. (9.40b) and (9.40d) simultaneously, to express Q 2 and Q 4 in terms of ¯ u 1 through ¯ u 4. This yields Q2= E I rb u 1 + 4 L 2( 3 − 2 r e) ¯ u 2 − 6 L( 2 − r e) ¯ u 3 + 2 L 2 r e ¯u 4] L 3 R [ 6 L( 2 − r e) ¯ rb + (9.41a) R [( 4 − 3 r e) FM b − 2(1 − r e) FM e] Q4= E I re u 1 + 2 L 2 r b ¯u 2 − 6 L( 2 − r b) ¯ u 3 + 4 L 2( 3 − 2 r b) ¯ u 4] L 3 R [ 6 L( 2 − r b) ¯ re + (9.41b) R [( 4 − 3 r b) FM e − 2(1 − r b) FM b] in which r b and r e denote the dimensionless rigidity parameters defined as ri= kiL E I + kiL i = b, e (9.42) and R = 12 − 8 r b − 8 r e + 5 r b r e (9.43) Finally, by substituting Eqs. (9.41) into Eqs. (9.40a) and (9.40c), we determine expressions for Q 1 and Q 3 in terms of ¯ u 1 through ¯ u 4. Thus, Q1= E I u 1 + 6 Lr b( 2 − r e) ¯ u 2 L 3 R [ 12( r b + r e − r b r e) ¯ − 12( r b + r e − r b r e) ¯ u 3 + 6 Lr e( 2 − r b) ¯ u 4] + FS b − 6 LR [( 1 − r b)( 2 − r e) FM b + ( 1 − r e)( 2 − r b) FM e] (9.44a) Q3= E I u 1 − 6 Lr b( 2 − r e) ¯ u 2 L 3 R [ − 12( r b + r e − r b r e) ¯ + 12( r b + r e − r b r e) ¯ u 3 − 6 Lr e( 2 − r b) ¯ u 4] + FS e + 6 LR [( 1 − r b)( 2 − r e) FM b + ( 1 − r e)( 2 − r b) FM e] (9.44b) Equations (9.41) and (9.44), which represent the modified stiffness relations for beam members with semirigid connections at both ends, can be expressed in matrix form: Q=¯ku ū ¯ +Q f (9.45) Copyright 2010 Cengage Learning. All Rights Reserved. May not be copied, scanned, or duplicated, in whole or in part. Due to electronic rights, some third party content may be suppressed from the eBook and/or eChapter(s). Editorial review has deemed that any suppressed content does not materially affect the overall learning experience. Cengage Learning reserves the right to remove additional content at any time if subsequent rights restrictions require it. 541 Section 9.7 Shear Deformations with ••••• k̄ = E I k L3 R 6 Lr b( 2 − r e) − 12( r b + r e − r b r e) 12( r b + r e − r b r e) 4 L 2 r b( 3 − 2 r e) 6 Lr b( 2 − r e) − 12( r b + r e − r b r e) − 6 Lr b( 2 − r e) 6 Lr e( 2 − r b) 6 Lr e( 2 − r b) − 6 Lr b( 2 − r e) ••••• 2 L2 rb re 12( r b + r e − r b r e) − 6 Lr e( 2 − r b) − 6 Lr e( 2 − r b) 2 L2 rb re 4 L 2 r e( 3 − 2 r b) (9.46) and ••••••••••• FS b − 6 ••••••••••• LR [( 1 − r b)( 2 − r e) FM b + ( 1 − r e)( 2 − r b) FM e] rb R [(4 − 3 r e) FM b − 2(1 − r e) FM e] Qf= FS e + 6 LR [( 1 − r b )( 2 − r e) FM b + ( 1 − r e)( 2 − r b) FM e] re R [ − 2 ( 1 − r b) FM b + ( 4 − 3 r b) FM e] (9.47) The ¯ k matrix in Eq. (9.46) and the Q f vector in Eq. (9.47) represent the modified stiffness matrix and fixed-end force vector, respectively, for the members of beams with semirigid connections. It should be noted that these expressions for ¯ k and Q f are valid for the values of the spring stiffness k i ( i = b or e) ranging from 0, which represents a hinged connection, to infinity, which represents a rigid connection. From Eq. (9.42), we can see that as k i varies from 0 to infinity, the value of the corresponding rigidity parameter r i varies from 0 to 1. Thus, r i = 0 represents a frictionless hinged connection, whereas r i = 1 represents a perfectly rigid connection. The reader is encouraged to verify that when both r b and r e are set equal to 1, then ¯ k ( Eq. (9.46)) and Q f ( Eq. (9.47)) reduce the k ( Eq. (5.53)) and Q f ( Eq. (5.99)) for a beam member rigidly connected at both ends. Similarly, the expressions of k and Q f, derived in Chapter 7 for beam members with three combinations of rigid and hinged connections (i.e., MT = 1, 2, and 3), can be obtained from Eqs. (9.46) and (9.47), respectively, by setting r b and r e to 0 or 1, as appropriate. The procedure for analysis of beams with rigid and hinged connections, developed previously, can be applied to beams with semirigid connections— provided that the modified member stiffness matrix ¯ k ( Eq. (9.46)) and fixedend force vector Q f ( Eq. (9.47)) are used in the analysis. 9.7 SHEAR DEFORMATIONS The stiffness relations that have been developed thus far for beams, grids, and frames, do not include the effect of shear deformations of members. Such structures are generally composed of members with relatively large length-todepth ratios, so that their shear deformations are usually negligibly small as compared to the bending deformations. However, in the case of beams, grids Copyright 2010 Cengage Learning. All Rights Reserved. May not be copied, scanned, or duplicated, in whole or in part. Due to electronic rights, some third party content may be suppressed from the eBook and/or eChapter(s). Editorial review has deemed that any suppressed content does not materially affect the overall learning experience. Cengage Learning reserves the right to remove additional content at any time if subsequent rights restrictions require it. 542 Chapter 9 Special Topics and Modeling Techniques and rigid frames consisting of members with length-to-depth ratios of 10 or less, and/or built-up (fabricated) members, the magnitudes of shear deformations can be considerable; therefore, the effect of shear deformations should be included in the analyses of such structures. In this section, we consider a procedure for including the effect of shear deformations in the member stiffness relations, and present the modified stiffness matrix for the members of beams. This matrix, which contains the effects of both the shear and bending deformations, can be easily extended to obtain the corresponding modified member stiffness matrices for grids, and plane and space frames. The relationship between the shearing strain at a cross-section of a beam member and the slope of the elastic curve due to shear can be obtained by considering the shear deformation of a differential element of length dx of the member, as shown in Fig. 9.15. From this figure, we can see that γ=−d¯ u yS (9.48) dx u yS represents the deflection, due to in which γ denotes the shear strain, and ¯ shear, of the member’s centroidal axis in the y direction. The negative sign in Eq. (9.48) indicates that the positive shear force S causes deflection in the negative y direction, as shown in the figure. Substitutions of Hooke’s law for shear, γ = τ/ G, and the stress-force relation, τ = f S S/A, into Eq. (9.48), yield the following expression for the slope of the elastic curve due to shear. ) d ¯u yS dx = −( f S S GA (9.49) in which f S represents the shape factor for shear. The dimensionless shape factor f S depends on the shape of the member cross-section, and takes into account S S y γ − du¯ yS x dx Fig. 9.15 Copyright 2010 Cengage Learning. All Rights Reserved. May not be copied, scanned, or duplicated, in whole or in part. Due to electronic rights, some third party content may be suppressed from the eBook and/or eChapter(s). Editorial review has deemed that any suppressed content does not materially affect the overall learning experience. Cengage Learning reserves the right to remove additional content at any time if subsequent rights restrictions require it. 543 Section 9.7 Shear Deformations the nonuniform distribution of shear stress on the member cross-section. The values of f S for some common cross-sectional shapes are as follows. f S = 1.2 for rectangular cross-sections f S = 10/9 for circular cross-sections f S = 1 for wide-flange beams bent about the major axis, provided that the area of the web is used for A in Eq. (9.49) Integration of Eq. (9.49) yields the expression for deflection due to shear; the total deflection (or slope) of the member due to the combined effect of shear and bending can be determined via superposition of the deflections (or slopes) caused by shear and by bending. As discussed in Chapter 5, the equations for the slope and deflection, due to bending, can be obtained by integrating the moment– curvature relationship: d 2 ¯u yB dx 2 = M (9.50) EI in which ¯ u yB represents the deflection of the member due to bending. The expressions for the elements of the modified stiffness matrix k for a beam member, due to the combined effect of the bending and shear deformations, can be derived using the direct integration approach. To obtain the expressions for the stiffness coefficients k i 1 ( i = 1 through 4) in the first column of k, we subject a prismatic beam member of length L to a unit value of the end displacement u 1 at end b, as shown in Fig. 9.16. Note that all other member end displacements are 0, and the member is in equilibrium under the action of two end moments k 21 and k 41, and two end shears k 11 and k 31. From the figure, we y b′ k 41 u1= 1 k 21 x e b k 11 k 31 x L EI = constant u2= u3= u4= 0 Fig. 9.16 Copyright 2010 Cengage Learning. All Rights Reserved. May not be copied, scanned, or duplicated, in whole or in part. Due to electronic rights, some third party content may be suppressed from the eBook and/or eChapter(s). Editorial review has deemed that any suppressed content does not materially affect the overall learning experience. Cengage Learning reserves the right to remove additional content at any time if subsequent rights restrictions require it. 544 Chapter 9 Special Topics and Modeling Techniques can see that the shear and bending moment at a distance x from end b of the member are: S = k 11 (9.51) M = − k 21 + k 11 x (9.52) By substituting Eq. (9.51) into Eq. (9.49), and integrating the resulting equation, we obtain the equation for deflection, due to shear, as ) ū yS = −( f S u (9.53) k 11 x + C 1 GA in which C 1 denotes a constant of integration. By substituting Eq. (9.52) into Eq. (9.50), and integrating the resulting equation twice, we obtain the equations for the slope and deflection of the member, due to bending: ( − k 21 x + k 11 d ¯u yB dx = 1 ū yB = 1 u EI ( − k 21 EI x2 ) 2 x2 x3 2 + k 11 6 + C2 (9.54) + C2 x + C3 (9.55) ) As the shear deformation does not cause any rotation of the member crosssection (see Fig. 9.15), the rotation of the cross-section, θ, results entirely from bending deformation, and is given by (see Eq. (9.54)) θ=d¯ ( − k 21 x + k 11 u yB dx = 1 EI x2 ) 2 + C2 (9.56) By combining Eqs. (9.53) and (9.55), we obtain the equation for the total deflection, ¯ u y, due to the combined effect of the shear and bending deformations: ( − k 21 ) ū y = ¯ u yS + ¯ u yB = −( f S u GA k 11 x + 1 EI x2 x3 2 + k 11 6 ) + C2 x + C4 (9.57) in which the constant C 4 = C 1 + C 3. The four unknowns in Eqs. (9.56) and (9.57)—that is, two constants C 2 and C 4 and two stiffness coefficients k 11 and k 21 —can now be evaluated by applying the following four boundary conditions: at end b, x=0 x=0 at end e, x=L x=L θ=0 ū y = 1 u θ=0 ū y = 0 u By applying these boundary conditions, we obtain C 2 = 0, C 4 = 1, and ( 1 1 + βS ) k 11 = 12 E I L3 (9.58) ( 1 1 + βS ) k 21 = 6 E I L2 (9.59) Copyright 2010 Cengage Learning. All Rights Reserved. May not be copied, scanned, or duplicated, in whole or in part. Due to electronic rights, some third party content may be suppressed from the eBook and/or eChapter(s). Editorial review has deemed that any suppressed content does not materially affect the overall learning experience. Cengage Learning reserves the right to remove additional content at any time if subsequent rights restrictions require it. 545 Section 9.8 Nonprismatic Members with β S = 12 E I f S GAL 2 (9.60) The dimensionless parameter β S is called the shear deformation constant. The two remaining stiffness coefficients, k 31 and k 41, can now be determined by applying the equations of equilibrium to the free body of the member (Fig. 9.16). Thus, ( 1 1 + βS ) k 31 = − 12 E I L3 (9.61) ( 1 1 + βS ) k 41 = 6 E I L2 (9.62) The expressions for elements in the remaining three columns of the k matrix can be derived in a similar manner, and the complete modified stiffness matrix for rigidly-connected members of beams, thus obtained, is •••• 12 k= E I L3( 1 + β S) 6L 6L − 12 •••• ( 9.63) 6 L L 2( 4 + β S) − 6 L L 2( 2 − β S) −6L 12 6 L L 2( 2 − β S) − 6 L L 2( 4 + β S) − 12 −6L From Eq. (9.63), we can see that when the shear deformation constant β S is set equal to 0, then k of Eq. (9.63) is reduced to that of Eq. (5.53). It should be realized that the expressions for fixed-end forces due to member loads, given inside the front cover, do not include the effects of shear deformations. If modified fixed-end force expressions including shear deformations are desired, they can be derived using the procedure described in this section. 9.8 NONPRISMATIC MEMBERS Thus far in this text, we have considered the analysis of structures composed of prismatic members. A member is considered to be prismatic if its axial and flexural rigidities ( EA and EI ), or its cross-sectional properties, are constant along its length. In some structures, for aesthetic reasons and/or to save material, it may become necessary to design members with variable cross sections. In this section, we consider the analysis of structures composed of such nonprismatic members. Perhaps the simplest (albeit approximate) way to handle a nonprismatic natural member, such as a girder or a column, is to subdivide it into a sufficient number of segments, and model each segment by a prismatic member (or element) with cross-sectional properties equal to the average of the crosssectional properties at the two ends of the segment (Fig. 9.17 on the next page). The main advantage of this approach is that computer programs such as those Copyright 2010 Cengage Learning. All Rights Reserved. May not be copied, scanned, or duplicated, in whole or in part. Due to electronic rights, some third party content may be suppressed from the eBook and/or eChapter(s). Editorial review has deemed that any suppressed content does not materially affect the overall learning experience. Cengage Learning reserves the right to remove additional content at any time if subsequent rights restrictions require it. 546 Chapter 9 Special Topics and Modeling Techniques (a) Nonprismatic Member (b) Analytical Model of Nonprismatic Member Fig. 9.17 developed in previous chapters can be used without any modifications. The main disadvantage of this approach is that the accuracy of the analytical results depends on the number of prismatic members (or elements) used to model each nonprismatic member, and an inordinate number of prismatic members may be required to achieve an acceptable level of accuracy. An alternate approach that can be used to handle nonprismatic members involves formulation of the nonprismatic member’s stiffness relations while taking into account the exact variation of the member’s cross-sectional properties. The main advantage of this exact approach is that a natural nonprismatic member (e.g., a girder or a column) can be treated as a single member for the purpose of analysis. However, as will become apparent later in this section, the exact expressions for the stiffness coefficients for nonprismatic members can be quite complicated [43]. In the following, we illustrate the exact approach via derivation of the local stiffness matrix k for a tapered plane truss member [26]. Consider a tapered member of a plane truss, as shown in Fig. 9.18(a). The cross-sectional area of the member varies linearly along its length in accordance with the relationship Ax= Ab ( 1 − rA x ) L (9.64) inwhich A b and A x denote, r esp ectively, themember’s cross-sectional areas at its end b, and at a distance x from end b; and r A represents the area ratio given by rA= Ab− Ae Ab (9.65) with A e denoting the me mber’s cross-sectional area at end e, as shown in the figure. To derive the first column of the tapered member’s local stiffness matrix k, we subject the member to a unit end displacement u 1 = 1 (with u 2 = u 3 = u 4 = 0), as shown in Fig. 9.18(b). The expressions for the member axial forces required Copyright 2010 Cengage Learning. All Rights Reserved. May not be copied, scanned, or duplicated, in whole or in part. Due to electronic rights, some third party content may be suppressed from the eBook and/or eChapter(s). Editorial review has deemed that any suppressed content does not materially affect the overall learning experience. Cengage Learning reserves the right to remove additional content at any time if subsequent rights restrictions require it. 547 Section 9.8 Nonprismatic Members y Ae x e b Ab x L E = constant (a) Tapered Plane Truss Member y u1= 1 b e b′ k 31 k 11 k 21 x k 41 x L (b) u 1 = 1, u 2 = u 3 = u 4 = 0 Fig. 9.18 to cause this unit axial deformation can be determined by integrating the differential equation for member axial deformation that, for members with variable cross-sections, can be written as (see Eq. (6.7), Section 6.2) d ¯u x dx = Q a EA x (9.66) From Fig. 9.18(b), we can see that the axial force acting on the member crosssection at a distance x from its end b is Q a = − k 11 (9.67) Copyright 2010 Cengage Learning. All Rights Reserved. May not be copied, scanned, or duplicated, in whole or in part. Due to electronic rights, some third party content may be suppressed from the eBook and/or eChapter(s). Editorial review has deemed that any suppressed content does not materially affect the overall learning experience. Cengage Learning reserves the right to remove additional content at any time if subsequent rights restrictions require it. 548 Chapter 9 Special Topics and Modeling Techniques in which the negative sign indicates that k 11 causes compression at the member cross-section. Substituting Eqs. (9.64) and (9.67) into Eq. (9.66), and integrating the resulting equation, we obtain ln (1 − r A x ū x = k 11 L u EA b r A L ) + (9.68) C in which C is a constant of integration. The two unknowns, C and k 11, in Eq. (9.68) can be evaluated by applying the boundary conditions: at end b, x=0 ū x = 1 u at end e, x=L ū x = 0 u Application of the foregoing boundary conditions yields C = 1, and k 11 = − EA b r A (9.69) L ln(1 − r A) The three remaining stiffness coefficients can now be determined by applying the equations of equilibrium to the free body of themember (Fig. 9.18(b)). Thus, k 21 = k 41 = 0 k 31 = EA b r A L ln(1 − r A) , (9.70) The expressions for elements in the third column of the tapered member’s local stiffness matrix k can be derived in a similar manner; and, as discussed in Section 3.3, all elements of the second and fourth columns of k are 0. The complete local stiffness matrix k for a tapered plane truss member, thus obtained, is •••• − 1 0 100 •••• 0 001 0−1000 00 k = EA b r A L ln(1 − r A) (9.71) E XAMP L E 9.6 Using the direct integration approach, derive the expressions for the slope and deflection at the free end of the tapered cantilever beam shown in Fig. 9.19(a). The beam has a rectangular cross-section of constant width b, but its depth varies linearly from h 1 at the fixed end to h 2 at the free end. S O L U T I O N The depth and moment of inertia of the beam at a distance x( 0 ≤ x ≤ L) from its free end can be expressed as hx= h1 Ix= I1 ( 1 − rh x ) L ( 1 − rh x ) 3 L Copyright 2010 Cengage Learning. All Rights Reserved. May not be copied, scanned, or duplicated, in whole or in part. Due to electronic rights, some third party content may be suppressed from the eBook and/or eChapter(s). Editorial review has deemed that any suppressed content does not materially affect the overall learning experience. Cengage Learning reserves the right to remove additional content at any time if subsequent rights restrictions require it. 549 Section 9.8 Nonprismatic Members y A P b h1 hx 2 h2 2 x h1 hx 2 2 Section A-A Beam cross-section A x L E = constant (a) Tapered Cantilever Beam y P PL x x P (b) Fig. 9.19 in which r h represents the depth ratio given by rh= h1− h2 (1) h1 and I 1 = bh 31/ 12 = beam’s moment of inertia at its fixed end. The equations for the slope and deflection can be derived by integrating the differential equation for bending of beams with variable cross-sections, which can be written as (see Eq. (5.5), Section 5.2) d 2 ¯u y (2) dx 2 = M E I x From Fig. 9. 19(b ), we ca n see that the bending moment at the beam section at a distance x from its fixed end is M = − P(L − x) (3) in which the negative sign indicates that the bending moment is negative in accordance with the beam sign convention ( Fig. 5.4). Substituting Eq. (3) into Eq. (2) and integrating, we obtain the equation for slope as [ L + rhL − 2 rh x θ = − PL 3 2 E I1 r h2 ( L − r h x) 2 ] + C1 (4) Copyright 2010 Cengage Learning. All Rights Reserved. May not be copied, scanned, or duplicated, in whole or in part. Due to electronic rights, some third party content may be suppressed from the eBook and/or eChapter(s). Editorial review has deemed that any suppressed content does not materially affect the overall learning experience. Cengage Learning reserves the right to remove additional content at any time if subsequent rights restrictions require it. 550 Chapter 9 Special Topics and Modeling Techniques Integrating once more, we obtain the equation for deflection as •••••• 1 − r h ( ( ū y = PL 3 u 2 E I 1 r h3 ) + 2 ln ) ••••••+ C 1 x +C 2 1 − rh x (5) L 1 − rh x L The constants of integration, C 1 and C 2, are evaluated by applying the boundary conditions that at x = 0, θ = 0 and ¯ ( 1 + rh C 1 = PL 2 u y = 0. Thus, ) r h2 2 E I1 C 2 = − PL 3( 1 − r h) 2 E I 1 r h3 By substituting these expressions for C 1 and C 2 into Eqs. (4) and (5) we determine the equations for slope and deflection of the beam as ••• x − 2 L + r h x θ = Px 2 E I1 ( 1 − rh x ••• ) (6) 2 L ū y = u PL 3 ( 1 − rh x 2 E I 1 r h3 L ) [ 2 rh x L − r2 ) hx2 L 2 ( 1 + r h) + 2 (1 − r h x L )] ln (1 − r h x L (7) Finally, the expressions for slope and deflection at the free end of the tapered beam are obtained by setting x = L in Eqs. (6) and (7), respectively. Thus, Slope (+ ): Y θ L = − PL 2 2 E I 1( 1 − r h) = − PL 2 h 2 1E I 1 h 2 Ans Deflection (+ ↑): ¯ u yL = − PL 3 2 E I 1 r h3 ( 1 − r h) [ − 2 r h + r 2 h( 1 + r h) − 2(1 − r h) ln(1 − r h)] Ans E XAMP L E 9.7 Using a structural analysis computer program, determine the slope and deflection at the free end of the tapered cantilever beam shown in Fig. 9.20(a). The beam is of rectangular cross-section of width 150 mm, and its depth varies linearly from 400 mm at the fixed end to 100 mm at the free end, as shown in the figure. For analysis, divide the nonprismatic beam into smaller segments, and model each segment by a prismatic member (element) with a constant moment of inertia based on the average depth of the segment. Analyze several models of the beam with increasing number of members (elements) until the values of the desired displacements converge. Compare these numerical results with the exact analytical solutions for the tapered beam obtained from the expressions derived in Example 9.6. S O L U T I O N Seven analytical models of the beam consisting of 1, 2, 3, 4, 6, 9, and 12 segments were analyzed using the computer program provided with this book. In these models, each tapered segment was approximated by a member of constant depth equal to the average depth of the segment. Figure 9.20(b) shows such a three-member model of the beam. Copyright 2010 Cengage Learning. All Rights Reserved. May not be copied, scanned, or duplicated, in whole or in part. Due to electronic rights, some third party content may be suppressed from the eBook and/or eChapter(s). Editorial review has deemed that any suppressed content does not materially affect the overall learning experience. Cengage Learning reserves the right to remove additional content at any time if subsequent rights restrictions require it.