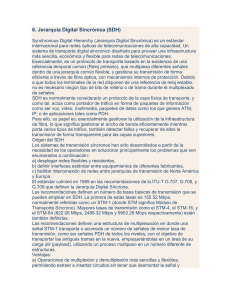
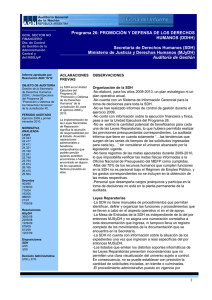
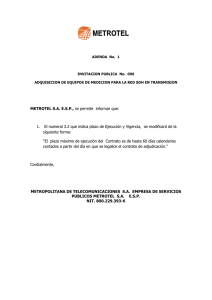
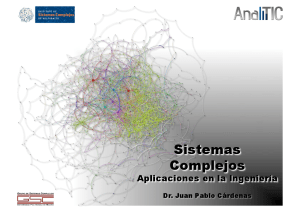
NOMBRE: JOEL CESAR MAMANI CHAMBILLA PROFESOR: ING. HENRY GÓMEZ SDH INTRODUCCIÓN La demanda de servicios de telecomunicaciones mas eficaces, y con capacidades de comunicación superiores, y una capacidad de gestión flexible y global, hacían necesario buscar una solución de red normalizada. El primer estándar de transmisión fue el pdh , pero por sus limitaciones resultaron en el desarrollo el sonet y el sdh. En las siguientes diapositivas hablaremos del sdh. ¿QUÉ ES EL SDH? Es un dispositivo digital que trabaja realizando multiplexación por división de tiempo Toma pequeñas ranuras en el tiempo y las ubica en forma ordenada en una ranura de tiempo mas grande La sucesión de ranuras en el tiempo se denomina trama En la trama se halla la información que ingresa por los ports mas un relleno que sirve para demultiplexar la trama en el otro extremo. Conmutación de circuitos , fue estandarizada a finales de los años 80 , cuando el trafico predominante era el trafico de voz, en multiplexaje de señales en el dominio del tiempo, no es muy eficiente en el manejo de paquetes y necesita usar un mecanismo para adaptar los paquetes a circuitos ESTRUCTURA DE MULTIPLEXACIÓN En el esquema se muestra el esquema de multiplexación SDH aceptado a nivel europeo, a la derecha aparecen los flujos plesiocronos de 1, 2 , 6 , 34 y 140 mbit/s. Cada una de las señales se adapta, para su transmisión por la red SDH, en conectores síncronos (C-X) . Estos contenedores se multiplexan para formar a señal STM-N resultante BLOQUES FUNCIONALES Una forma de describir la funcionalidad general es dividirla en bloques funcionales , según la recomendación de G-783 de la uit-t. Cada una es estos bloques representa un función concreta. La concatenación de bloques funcionales discretos define la funcionalidad de un equipo multiplex SDH. LOS BLOQUES FUNCIONALES SE PUEDEN AGREGAR SEGÚN SU FUNCIÓN INTERFAZ FÍSICO SÍNCRONO Esta función proporciona la interfase entre el medio físico de transmisión y la terminación de sección La función spi proporciona información sobre parámetros relacionados con el estado físico de la interfaz síncrona, tales como fallo de transmisión o trasmisión degradada. regenera la señal proveniente del medio físico y la separa en señal de reloj y datos. Los bits son transmitidos y recibidos en secuencia , comenzando por la primer fila y de izquierda a derecha. Tras la transmisión del ultimo byte de la trama, se repite el proceso con la trama siguiente. TERMINACIÓN DE SECCIÓN: Bajo la denominación de terminación de sección agrupamos las funciones de terminación de sección de regeneración RST y de multiplexación MST Actúan como fuente y sumidero para la tara de sección de regeneración(RSOH) y multiplexación(MSOH) respectivamente. PROTECCIÓN DE SECCIÓN DE MULTIPLEXACIÓN Las función MSP proporciona protección de la señal STM-N contra fallos en la sección de multiplexación. Las funciones , existen en ambos extremos de la sección de multiplexación, monitorizan las señales STMN y conmutan al canal de reserva en caso de fallo. Las dos funciones MSP se comunican entre si por medio de los byts K1 y K2 de MSOH, utilizando un protocolo denominado APS(automatic protection switching) ADAPTACIÓN DE SECCIÓN (MSA): Esta función me permite la adaptación de trayectos de orden superior(VC-4) para su transmisión por sección de multiplexación. Se obtienen capítulos administrativas(AU-e) generando, interpretando y procesando punteros. El puntero de AU-4 proporciona un método para transmitir una alineación flexible y dinámica del VC-4 dentro de la trama STM1.EL puntero de AU-4 indica la ubicación del primer byte del VC-4(J1) Si existe una diferencia de frecuencia entre la velocidad de la trama AU-4 (STM-N) y la del VC-4, el valor del puntero se incrementara o disminuirá según la necesidad. Conexión de trayecto de orden superior (HOPC) Conexión del trayecto del orden superior(HOPC). esta función asigna VC-4 en sus puertos de entrada, a VC4 en sus puertos de salida Terminación de trayecto de orden superior (HOPT) Esta función actúa como fuente y sumidero para la tara de trayecto de orden superior(POH). Adaptación de trayecto de orden superior(HOPA) Esta función permite la adaptación de trayectos de orden inferior(VC-12 y VC-3) para su transmisión por trayectos de orden superior (VC-4)- SE obtienen unidades tributarias (TU) generando, interpretando y procesando punteros. El puntero TU proporciona un método que permite una alineación flexible y dinámica del VC-12 o VC-3 dentro de la trama VC-4 . EL puntero TU indica la ubicación del primer byte de VC-12 o VC-3. Si existe una diferencia de frecuencia entre la velocidad del TU y la del VC-12 o VC.-3, el valor del puntero e incrementara o disminuirá según las necesidades. Conexión de trayecto de orden inferior(LOPC) Esta función asigna VC-12 o VC-3 en sus puertos de entrada , a VC- 12 o VC-3 en sus puertos de salida. Terminación de trayecto de orden inferior (LOPT) Esta función actúa como fuente de sumidero para la tara de trayecto de orden inferior. Adaptación de trayecto de orden inferior (LOPA): Esta función opera en el puerto de acceso a una red síncrona o subred y adapta los datos para el transporte en el dominio síncrono. en el caso de datos plesiocronos, la adaptación de trayecto de orden inferior comprende la justificación de bits. La función hace corresponder las señales G.703 ( 2Mbit/s, 34Mbit/s,140Mbit/s) con contenedores síncronos (C-12,C-3 y C-4). Se han definido funciones para cada uno de los niveles existentes en la jerarquía plesiocroma. Cada una define la manera en que una señal de usuario puede hacerse corresponder con uno de los contenedores sincronos . Existen funciones LOPA asincronas y bytee sincronas. INTERFAZ FÍSICA PLESIOCRONA (PPI) Esta función proporciona la interfaces entre la función LOPA y el medio físico que transporta una seal de tributaria. Sincronización Los NEs de una red SDH necesitan un reloj para funcionar correctamente. Para generarlo los relojes disponen de un oscilador interno. Este, por si mismo, puede proporcionar un reloj aunque no de gran calidad, movido por el que se utilizan referencias de sincronización externas al NE para generar una señal de reloj con mejor calidad. Las referencias que se utilizan para sincronizar una red SDH, suelen originarse en relojes patrones de gran calidad ( normalmente de cesio).dichas referencias se irán transmitiendo a lo largo de la red, de forma que todos los NEs de la misma funcionen con el mismo reloj. La planificación de la distribución de la sincronización de una red es un aspecto importante que debe efectuarse con sumo cuidado. Función de sincronización: En la figura se muestra la función de sincronización en un NE según se define en la recomendación G.78e de la UIT-T En ella se ve que la sincronización del NE o reloj del mismo , se obtiene de una de las referencias T1, T2,T3 o del oscilador interno. En realidad, el oscilador interno se va enganchar a una de las citadas referencias o va a funcionar sin ninguna de ellas, en cuyo caso estará en oscilación libre o en modo de retención . SETG (synchronization equipment timing generator): Enganchado(locked): El SETG esta controlado por Es el generador de la temporización del equipo y de el e obtienen la referencia T0. Tiene tres modos de operación. una de las referencias externas T1,T2o T3. Es el modo normal de funcionamiento. Retención(Hold-Over): el SETG, dura su funcionamiento normal , es capaz de almacenar interno (20148 kbit/s) del equipo. regularmente el valor de la referencia externa. si pierde dicha referencia , será capaz de seguir funcionando algún tipo con el valor memorizado. oscilación libre (free Running): No es un modo de funcionamiento recomendable. Sígnica que las referencias externas se han perdido y el equipos no es capaz de seguir funcionando con el valor memorizado de la ultima referencia externa. En este caso , el SETG es controlado por el generador Referencias de sincronización: REFERENCIAS INTERNAS T1: representa una señal STM-N que entra al NE y que puede ser utilizada como referencia de sincronización. T2: Representa una señal de 2048 kbit/s que entra al NE y que puede ser utilizada como referencia de sincronización. T3: Representa una señal de 2048 kHz que entra al NE y que puede ser utilizada como referencia de sincronización. REFERENCIAS EXTERNAS (SALIDAS): T0: representa el reloj con que se esta sincronizando el NE. Se origina en el oscilador interno del elemento, el cual puede estar utilizando una de las referencias T1,T2 o T3 para generar el citado reloj . es la referencia con que se genera las tramas salientes , y en ese sentido es considerada una referencia externa. T4:representa una selak de sincronización (normalmente a 2048kHz) que sale del Ne mediante la cual pueden sincronizarse otros elementos. SELECTORES A,B Y C REALIZAN LAS SIGUIENTES FUNCIONES: SELECTOR A: Realiza la función de seleccionar entre las distintas señales de ti T1.La señal seleccionada será la que se entregue en T4 si el selector C lo permite. SELECTOR B: Realiza la función de seleccionar entre las señales de tipo T1, T2 y T3 la que va a ser utilizada para generar la señal T0. SELECTOR C: Realiza la función de seleccionar que señal queremos entregar en T4. Permite elegir entre las dos opciones T0=T4 y T1=T4. Los selectores A y B eligen entre las diferentes señales disponibles basándose en tres criterios: NIVEL DE CALIDAD: El NE tratara en todo momento de sincronizarse con la referencia que tenga el mejor nivel de calidad. ejemplo: es posible que el algoritmo SSM este desabilitado, en cuyo caso el nivel de calidad no será tenido en cuenta. PRIORIDAD: Si existiese mas de una referencia con el mejor nivel de calidad, el NE trata de sincronizarse con la referencia que tenga la mejor prioridad(la primera prioridad es mejor que la segunda). ejemplo: los NE que no procesen el algoritmo SSM utilizaran el criterio de prioridad para seleccionar su referencia de sincronización. Comandos Externos: es posible, normalmente para mantenimiento, seleccionar o eliminar una determinada fuente de sincronismo. Arquitectura de red basada en sdh Las diversas funciones que constituye una red de telecomunicaciones pueden clasificarse en dos grupos. Uno es un grupo funcional de transporte(transfiere información ) y el otro es el grupo funcional de control (dando servicios, operaciones) Una red de transporte basada en la tecnología SDH puede descomponerse en redes de capa de transporte independientes con una asociación cliente servidor. Las capas de circuitos son las portadoras del servicio. Las capas de trayecto brindan la conexión entre nodos de red. Las capas de transmisión brindan soporte físico. La arquitectura de la red de transporte estaba basada en los conceptos de estratificación y subdivisión dentro de cada capa. La arquitectura de las redes SDH está definida por la Recomendación G.803, en esta recomendación se define un modelo tridimensional. La capa de red son un conjunto de puntos de acceso similares y que pueden estar asociados para transferir información. La función de adaptación es el proceso mediante el cual se adapta una información de capa para ser transportada por la red de la capa servidora. La adaptación intercapas cuenta con los siguientes procesos: Codificación Modificación de la velocidad Alineación Justificación Multiplexación La supervisión de la conexión se realiza a través de: Supervisión Intrínseca: Las conexiones de capa de trayecto pueden supervisarse de forma indirecta utilizando los datos disponibles intrínsecamente de la sección múltiplex o las capas del servidor del trayecto de orden superior, y calculando el estado aproximado de la conexión de trayecto del cliente a partir de los datos disponibles. Supervisión no intrusiva: La conexión puede supervisarse directamente mediante la información de tara pertinente en la sección de regeneración, la sección múltiplex, el trayecto de orden superior o el trayecto de orden inferior, calculándose a continuación el estado aproximado de la conexión a partir de la diferencia entre los estados supervisados en cada extremo de la conexión. Supervisión de Subcapa: Las conexiones pueden supervisarse de manera directa sobrescribiendo alguna parte de la capacidad de tara del camino original al comienzo de la conexión. En el caso de la SDH, la tara se ha definido a esos efect os en la capas de trayectos de orden superior e inferior. Cuando se aplica una conexión en cascada de la SDH, este método de supervisión se conoce como supervisión de la conexión en cascada. TÉCNICAS PARA MEJORAR LA DISPONIBILIDAD EN LA RED DE TRANSPORTE Anillos de Protección SDH MS-SP Ring (Multiplex SectionShared Protection Ring): MS-DP Ring (Multiplex SectionDedicat Se emplea solo la mitad de la capacidad en cada sección de multiplexación para cursar tráfico. Máximo 16 nodos. Distancia máxima total de la estructura de 1200 Km. Tiempos de conmutación inferiores a 50ms. Ante un fallo: – Los Nodos adyacentes detectan el fallo realizan una operación de Bridge&Switch. – El resto de nodos realizan una operación de Full Pass-Through. – En situación de conmutación el tráfico circula siempre pasando por todos los nodos del anillo MS-SPRING. Cada sentido de una conexión bidireccional emplea un camino distinto siguiendo un sentido del anillo. El sentido contrario sería el backup. Un inconveniente es que cada conexión bidireccional consume BW en todo el anillo. Máximo 16 nodos (por limitaciones en señalización).ed Protection Ring) : SNCP Ring (Subnetwork Connection Protection Ring) : Empleada en un anillo. Cada conexión unidireccional emplea ambos caminos en el anillo (es un 1+1). No tiene la limitación de 16 nodos. Soporta el fallo de un nodo. ASPECTOS DE GESTIÓN DE LOS ELEMENTOS DE RED DE TRANSPORTE EN SDH Las redes SDH actuales están construidas, básicamente, a partir de cuatro tipos distintos de equipos o elementos de red (ITU-T G.782): Regeneradores, Multiplexores Terminales, Multiplexores de Inserción y Extracción, y Distribuidores Multiplexores. Estos equipos pueden soportar una gran variedad de configuraciones en la red, incluso, un mismo equipo puede funcionar indistintamente en diversos modos, dependiendo de la funcionalidad requerida en el nodo donde se ubica. En la Figura 6 se muestra un diagrama de bloques de un elemento SDH genérico, sin considerar amplificadores o boosters opcionales. Regeneradores intermedios o IR (Intermediate Regenerators) Como su propio nombre indica regeneran la señal de reloj y la relación de amplitud de las señales digitales a su entrada, que han sido atenuadas y distorsionadas por la dispersión de la fibra óptica por la que viajan. Los regeneradores obtienen la señal de reloj a partir de la ristra de bits entrante. Multiplexores terminales o TM (Terminal Multiplexers) Es un elemento que se utiliza en un enlace punto a punto. Implementara únicamente la terminación de línea y la función de multiplexar o desmutiplexar varios tributarios en una línea STM-N. En el elemento genérico de la Figura 8, el TM STM-4 dispondría de una única interfaz agregada óptica STM-4 (con transmisión y recepción) y, dependiendo de la configuración, de varias interfaces tributarias eléctricas (1,5 Mbit/s, 2 Mbit/s, 34 Mbit/s, 45 Mbit/s, 140 Mbit/s, STM-1) u ópticas (STM-1) Multiplexores de inserción y extracción o ADM (Add and Drop Multiplexers) Se encargan de extraer o insertar señales tributarias plesiócronas o síncronas de cualquiera de las dos señales agregadas STM-N que recibe (una en cada sentido de transmisión), así como dejar paso a aquellas que se desee. Aporta la flexibilidad a la red SDH Distribuidores multiplexores o DXC (Digital Cross-Connect) Permiten la interconexión sin bloqueo de señales a un nivel igual o inferior, entre cualquiera de sus puertos de entrada y de salida. Los DXCs admiten señales de acceso, tanto plesiócronas como sícronas, en diversos nivele VELOCIDADES SONET/SDH Las señales de niveles más altos están formadas por la multiplexación de diversas señales de nivel 1 (STM-1), creando una familia de señales STM-N, donde la N indica el número de señales de nivel 1 que la componen. En la Tabla 1 se indican las denominaciones de las señales eléctricas y portadoras ópticas, así como sus velocidades y los puntos de coincidencia con los de SONET. En la tabla anterior, el ancho de banda de carga es la velocidad de línea menos el ancho de banda de las línea y de sección. Hay que resaltar que la progresión de velocidad de datos comienza en 155 Mbit/s y aumenta en múltiplos de 4. La única excepción es OC-24, que está normalizado en ANSI T1.105, pero no es una velocidad SDH estándar de la ITU-T G.707. A veces se describen otras tasas como OC-9, OC-18, OC-36 y OC-96 y OC1536, pero probablemente nunca han sido desplegados. Sin duda no son comunes y no son compatibles con las normas. La siguiente velocidad de 160 GB/s OC-3072/STM-1024 no se ha normalizado todavía, debido al coste de transceptores de alta velocidad, al ser más baratos los múltiplex de longitudes de onda a 10 y 40 Gbit/s. VENTAJAS Y DESVENTAJAS DE SDH Ventajas El proceso de multiplexación es mucho más directo. La utilización de punteros permite una localización sencilla y rápida de las señales tributarias de la información. El procesamiento de la señal se lleva a cabo a nivel de STM-1. Las señales de velocidades superiores son síncronas entre sí y están en fase por ser generadas localmente por cada nodo de la red. Las tramas tributarias de las señales de línea pueden ser subdivididas para acomodar cargas plesiócronas, tráfico ATM o unidades de menor orden. Esto supone mezclar tráfico de distinto tipo dando lugar a redes flexibles. Compatibilidad eléctrica y óptica entre los equipos de los distintos proveedores gracias a los estándares internacionales sobre interfaces eléctricos y ópticos. Un STM1 tiene la capacidad de agrupar varios E1 y T1 de forma multiplexada, es decir, se universaliza las velocidades ocupando los VC correspondientes, la capacidad del STM1 es suficiente. Desventajas Algunas redes PDH actuales presentan ya cierta flexibilidad y no son compatibles con SDH. Necesidad de sincronismo entre los nodos de la red SDH, se requiere que todos los servicios trabajen bajo una misma referencia de temporización. El principio de compatibilidad ha estado por encima de la optimización de ancho de banda. El número de Bytes destinados a la cabecera de sección es demasiado grande, lo que lleva a perder eficiencia.