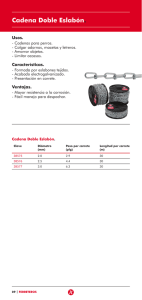
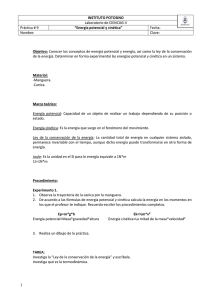
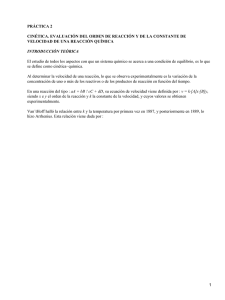
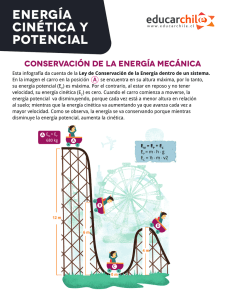
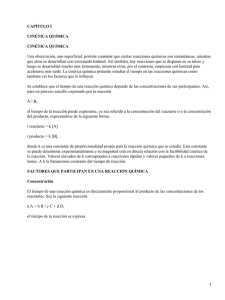
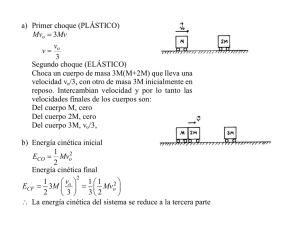
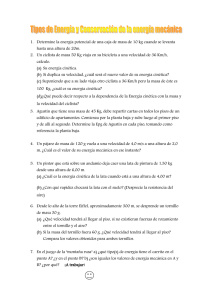
18.1.- CINETICA PLANA: TRABAJO Y ENERGIA ENERGIA CINETICA En este capítulo aplicaremos métodos de trabajo y energía para resolver problemas de movimiento plano que implican fuerza, velocidad y desplazamiento. Pero primero tendremos que desarrollar una forma de obtener la energía cinética del cuerpo cuando este se somete a traslación, rotación alrededor de un eje fijo o a movimiento plano general. Para hacer esto consideramos el cuerpo rígido mostrado en la figura. Una partícula iesima arbitraria del cuerpo de masa dm, se encuentra a u a distancia r del punto arbitrario P. Si en el instante que se muestra en la partícula tiene una velocidad inicial entonces la energía cinética de la partícula es 𝑻𝑰 = 𝟏 𝒅𝒎𝑽𝟐 𝟐 La energía cinética de todo el cuerpo se determina por la escritura de expresiones semejantes para cada una de las partículas del cuerpo y la integración de los resultados, es decir, 𝟏 𝒏 𝑻𝑰 = ∫ 𝒅𝒎 𝑽𝟐 𝟐 𝒎 Esta ecuación también puede expresarse en función de la velocidad del punto P. Si la velocidad angular del cuerpo es w entonces de acuerdo con la figura tenemos 𝑽𝒊 = 𝑽𝒑 + 𝑽 𝒊 𝒑 𝑽𝒊 =(𝑽𝒑 )𝒙 i+𝑽𝒑 )𝒚 j+𝝎𝑲 × (𝑿𝒊 + 𝒀𝒋) 𝑽𝒊 =[(𝑽𝒑 )𝒙 -𝝎𝒚]𝒊 +[(𝑽𝒑 )𝒚 -𝝎𝒙]𝒋 El cuadrado de la magnitud de velocidad inicial es, por tanto, 𝑽𝒊 ∗ 𝑽𝒊 = 𝒗𝟐𝒊 =[(𝑽𝒑 )𝒙 -𝝎𝒚]𝟐 +[(𝑽𝒑 )𝒚 -𝝎𝒙]𝟐 = (𝑽𝒑 )𝟐𝒙 − 𝟐(𝑽𝒑 )𝒙 𝝎𝒚 + 𝝎𝟐 𝒚𝟐 + (𝑽𝒑 )𝟐𝒚 + 𝟐(𝑽𝒑 )𝒚 𝝎𝒙 + 𝝎𝟐 𝒙𝟐 𝑽𝒊 ∗ 𝑽𝒊 = 𝒗𝟐 𝒑 − 𝟐(𝒗𝒑)𝒙 𝝎𝒚 + 𝟐(𝒗𝒑)𝒚 𝝎𝒙 + 𝝎𝟐 𝒓𝟐 Al sustituir está en la ecuación de energía cinética se obtiene . . 𝟏 T= (∫ 𝒅𝒎)𝒗𝟐 𝒑 − (𝒗𝒑)𝒙 𝝎(∫ 𝒀𝒅𝒎) 𝒎 𝟐 𝒎 . + (𝑽𝒑 )𝒚 𝝎(∫𝒎 𝑿𝒅𝒎) . 𝟏 + 𝝎𝟐 ( ∫ 𝒓𝟐 𝒅𝒎) 𝟐 𝒎 La primera integral de la derecha representa toda la masa m del cuerpo. Como ym=∫ 𝒚𝒎 𝒚 𝒙𝒎 = ∫ 𝒙𝒅𝒎, la segunda y tercera integrales localizan el centro de masa G con respecto a P. La última integral representa el momento de inercia del cuerpo Ip con respecto a P, calculado con respecto al eje Z que pasa por el punto, Por tanto, 𝟏 𝟏 𝟐 𝟐 T= 𝒎𝒗𝟐 𝒑 − (𝒗𝒑)𝒙 𝝎𝒚𝒎 + (𝑽𝒑 )𝒚 𝝎𝒙𝒎 + 𝑰𝒑 𝝎𝟐 Como un caso especial, si el punto P coincide con el centro de masa G del cuerpo, entonces Y=X=0, y por consiguiente 𝟏 𝟏 𝟐 𝟐 T= 𝒎𝒗𝟐𝑮 + 𝑰𝑮 𝝎𝟐 Ambos términos del lado derecho son siempre positivos, puesto que VG y w están elevados al cuadrado. El primer término representa la energía cinética de traslación, con respecto al centro de masa, y el segundo la energía cinética de rotación del cuerpo con respecto al centro de masa. Traslación. Cuando un cuerpo rígido de masa m se somete a traslación rectilínea o traslación curvilínea, la energía cinética producida por la rotación es cero, en vista de que W=0. La energía cinética del cuerpo es, por consiguiente 𝟏 T= 𝒎𝒗𝟐𝑮 𝟐 Rotación con respecto a un eje fijo. Cuando un cuerpo rígido gira alrededor de un eje fijo, que pasa por el punto O el cuerpo tiene energía cinética tanto de traslación como de rotación, de modo que 𝟏 𝟏 𝟐 𝟐 T= 𝒎𝒗𝟐𝑮 + 𝑰𝑮 𝝎𝟐 La energía cinética del cuerpo también puede formularse en este caso si observamos que de 𝑽𝑮 = 𝒓𝑮 𝝎 modo que 𝟏 T= (𝑰𝑮 + 𝒎𝒓𝟐𝑮 ) 𝝎𝟐 𝟐 Según el teorema de los ejes paralelos, los términos entre paréntesis representan el momento de inercia Io del cuerpo con respecto a un eje perpendicular al plano de movimiento y que pasa por el punto O. Por tanto 𝟏 T= 𝑰𝑶 𝝎𝟐 𝟐 Por la derivación, esta ecuación dará el mismo resultado que la ecuación anterior, puesto que toma en cuenta las energías cinéticas tanto de traslación como de rotación del cuerpo. Movimiento plano general. Cuando un cuerpo rígido se somete a movimiento plano general, su velocidad angular es w y la velocidad de su centro de masa es Vg. Por consiguiente, la energía cinética es 𝟏 𝟏 𝟐 𝟐 T= 𝒎𝒗𝟐𝑮 + 𝑰𝑮 𝝎𝟐 Esta ecuación también pude expresarse en función del movimiento del cuerpo con respecto a su centro instantáneo de velocidad cero, es decir, 𝟏 T= 𝑰𝑪𝑰 𝝎𝟐 𝟐 Donde Lci es el momento de inercia del cuerpo con respecto a su centro instantáneo. La comprobación es semejante a la ecuación 𝟏 T= 𝑰𝑶 𝝎𝟐 𝟐 Sistema de cuerpos. Como la energía es una cantidad escalar, la energía cinética total de los cuerpos rígidos conectados es la suma de las energías cinéticas de todas sus partes móviles. Según el tipo de movimiento, la energía cinética de cada cuerpo se determina por la ecuación del caso especial o las formas alternativas mencionadas. 18.2.- TRABAJO DE UNA FUERZA. Con frecuencia se encuentran varios tipos de fuerzas en problemas de cinética plana que implican un cuerpo rígido. El trabajo de cada una de estas fuerzas se presentó en la sección anterior y se resume a continuación. Trabajo de una fuerza variable. Si una fuerza externa F actúa en un cuerpo, el trabajo realizado por ella cuando el cuerpo se mueve a lo largo de una trayectoria s es . 𝑼𝑭 = ∫ 𝑭 ∗ 𝒅𝒙 = ∫ 𝑭𝒄𝒐𝒔𝜽𝒅𝒔 𝑺 Aquí teta es el ángulo entre las colas de la fuerza y el desplazamiento diferencial. La integración debe explicar la variación de la dirección y magnitud de la fuerza. Trabajo de una fuerza constante. Si una fuerza externa Fc actúa en un cuerpo y mantiene una magnitud constante Fc y dirección constante teta, en tanto que el cuerpo experimenta una traslación s, entonces la ecuación anterior puede integrarse, de modo que el trabajo es 𝑼𝑭 = (𝑭𝒄 𝒄𝒐𝒔𝜽)𝒔 Trabajo de un peso. El peso de un cuerpo realiza trabajo solo cuando su centro de masa G experimenta un desplazamiento vertical incremento en el eje Y. si este desplazamiento es hacia arriba, el trabajo es negativo, puesto que el peso se opone al desplazamiento. Asimismo, si el desplazamiento es hacia abajo (menos incremento en el eje Y) el trabajo se vuelve positivo. En ambos casos el cambio de elevación se considera mínimo de modo que W, producido por la gravitación, es constante. 𝑼𝑾 = −𝑾∆𝒚 Trabajo de una fuerza de resorte. Si un resorte elástico lineal se conecta a un cuerpo, la fuerza Fs= Ks que actúa en el cuerpo realiza trabajo cuando el resorte se alarga o comprime desde s1 hasta una posición s2 más lejana. En ambos casos el trabajo será negativo puesto que el desplazamiento del cuerpo se opone a la dirección de la fuerza. El trabajo es 𝟏 𝟏 𝑼𝒔 = −( 𝑲𝑺𝟐𝟐 − 𝑲𝑺𝟐𝟏 ) 𝟐 𝟐 Fuerzas que no realizan trabajo. Existen algunas fuerzas externas que no realizan trabajo cuando el cuerpo se desplaza. Estas fuerzas actúan en puntos fijos en el cuerpo o tienen una dirección perpendicular a su desplazamiento. Entre algunos ejemplos están las reacciones en un soporte de pasador alrededor del cual gira un cuerpo, la reacción normal que actúa en un cuerpo que se mueve a lo largo de una superficie fija, y el peso de un cuerpo cuando su centro de gravedad se mueve en un plano horizontal. Una fuerza de fricción F que actúa en un cuerpo redondo cuando rueda sin deslizarse sobre una superficie áspera tampoco realiza trabajo. Esto es porque durante cualquier instante de tiempo dt, Ff actúa en un punto del cuerpo el cual tiene velocidad cero (centro instantáneo, CI) y por tanto el trabajo realizado por la fuerza en el punto es cero. Dicho de otra manera, el punto no se desplaza en la dirección de la fuerza durante este instante. Como Ff se pone en contacto con puntos sucesivos durante solo un instante, el trabajo de Ff será cero. EJERCICIOS 18.1 En un instante dado el cuerpo de masa m tiene velocidad angular w y su centro de masa tiene velocidad Vg. Demuestre que su energía cinética puede ser representada por T=1/2 Lic𝑤 2 donde Lci es el momento de inercia del cuerpo calculado con respecto al eje instantáneo de velocidad cero, ubicado a una distancia Rg/ ic del centro de masa como se muestra 1 1 T= 𝑚𝑣 2 𝐺 + 𝐼𝑔𝑤 2 donde 𝑉𝐺 = 𝑤𝑟 𝐺⁄𝐼𝐶 2 2 1 1 T= 𝑚 (𝑤𝑟 𝐺⁄𝐼𝐶 )2 + 𝐼𝑔𝑤 2 2 2 1 2𝐺 T= (𝑚𝑟 ⁄𝐼𝐶 + 𝐼𝑔)𝑤 2 sin embargo 𝑚𝑟 2 𝐺⁄𝐼𝐶 + 2 𝐼𝑔 = 𝐿𝐼𝐶 𝟏 T= 𝑳𝑰𝑪 𝒘𝟐 𝟐 18.2 La doble polea se compone de dos partes conectadas entre sí. Pesa 50 lb y tiene un radio de giro con respecto a su centro de masa de k0=0.6 pie. Si gira con una velocidad angular de 20 rad/s en el sentido de las manecillas del reloj, determine la energía cinética del sistema. Suponga que ninguno de los dos cables se desliza sobre la polea. 1 1 1 2 2 2 T= 𝐿𝑜 𝑊 2 𝑜 + 50𝑉 2𝐴 + 𝑚𝐵 𝑉 2 𝐵 1 T= ( 50 2 32.2 1 (0.6)2 )(20)2 + ( 20 2 32.2 1 [(20)(1)]2 ) + ( T=283ft.lb 30 2 32.2 [(20)(0.5)]2 ) 18.3 Se aplica una fuerza P=20N al cable, la cual hace que gire el carrete de 175 kg sin deslizarse sobre los 2 rodillos A y B del despachador. Determine la velocidad angular del carrete después de que ha realizado dos revoluciones a partir del reposo. Ignore la masa del cable. Cada rodillo puede considerarse como un cilindro de 18 kg con radio de giro de 0.1m. El radio del giro del carrete con respecto a su centro de masa es kg=0.42m. 𝑻𝟏 + ∑ 𝑼𝟏−𝟐 = 𝑻𝟐 1 21 2 22 [0+0+0]+20(2) (2 𝜋)(0.250) = [175(0.422 )]𝑤 2 + [ (18)(0.1)2 ]𝑤𝑟 2 V=𝑤𝑟 (0.1) = 𝑤(0.5) 𝑤𝑟 = 5𝑤 W=1.88 rad/s 18.4 El carrete doble, originalmente en reposo, tiene una masa de 200kg y un radio de giro KG= 325 mm. Si el carrete descansa sobre dos pequeños rodillos A y B y se aplica una fuerza horizontal constante de P=400N al extremo del cable, determine la velocidad angular del carrete cuando se han desarrollado 8m de cable. Ignore la fricción, la masa de los rodillos y el cable desenrollado. 𝑻𝟏 + ∑ 𝑼𝟏−𝟐 = 𝑻𝟐 1 0 +(400) (8) = [200(0.325)2 ]𝑤2 2 2 𝒘𝟐 = 𝟏𝟕. 𝟒 𝒓𝒂𝒅/𝒔 18.5 El péndulo de la maquina de impacto Charpy tiene una masa de 50kg y un radio de giro Ka=1.75m. si se suelta desde el punto de reposo cuando el ángulo es cero, determine su velocidad angular justo antes de que choque con la muestra S, ángulo =90°. 𝑻𝟏 + ∑ 𝑼𝟏−𝟐 = 𝑻𝟐 1 0 +(50) (9.81) (1.25) = [50(1.75)2 ]𝑤2 2 2 𝒘𝟐 = 𝟐. 𝟖𝟑 𝒓𝒂𝒅/𝒔 18.6 Cada uno de los dos remolcadores ejerce una fuerza constante F en el buque. Estas fuerzas siempre actúan perpendiculares a la line del centro del buque. Si la masa de este es m y su radio de giro con respecto a su centro de masa G es KG, determine su velocidad angular después de que gire 90°. El buque originalmente está en reposo. Principio de trabajo y energía: Los dos remolcadores crean un par de momentos de M=Fd al girar la nave a través de un 𝜋 desplazamiento angular de 𝜃 = 2 𝑟𝑎𝑑. La masa. El momento de inercia sobre su centro de masa es IG=M𝐾 2 𝐺. Aplicando la ec. 18–14, tenemos: 𝑻𝟏 + ∑ 𝑼𝟏−𝟐 = 𝑻𝟐 1 0 +M𝜃 = (𝐼𝐺 𝑤 2 ) 2 𝜋 1 2 2 0 +𝐹𝑑 ( ) = 𝜔= (𝑚𝐾 2 𝐺)𝑤 2 1 𝜋𝐹𝑑 √ 𝐾𝐺 𝑚 18.7 El tambor tiene una masa de 50 kg y un radio de giro con respecto al pasador en O de Ko=0.23 m. Al partir del punto de reposo, se permite que el bloque B de 15 kg suspendido caiga 3 m sin aplicar el freno ACD. Determine su rapidez en ese instante. Si el coeficiente de fricción cinética de la balata C es Uk= 0.5, determine la fuerza P que debe aplicarse en la palanca del freno de mano, el cual detendrá el bloque después d que descienda 3 m. Ignore el espesor de la palanca. antes de frenar 1 1 𝑉𝐵 2 2 0.15 𝑻𝟏 + ∑ 𝑼𝟏−𝟐 = 𝑻𝟐 0 +15 (9.81) (3) = 15𝑉𝐵 2 + [50(0.23)2 ]( 𝑽𝑩 = 𝟐. 𝟓𝟖 𝒎/𝒔 𝑆𝐵 0.15 = 𝑆𝐶 0.25 Cuando 𝑆𝐵 = 3𝑚 𝑆𝑐 = 5 𝑚 𝑻 𝟏 + ∑ 𝑼𝟏−𝟐 = 𝑻𝟐 0- F(5)+ 15(9.81)(6)=0 F=176.6 N N= 𝟏𝟕𝟔.𝟔 Brazo de freno ∑. 𝑴𝑨 =0; -353.2(0.5)+P(1.25)=0 P=141N .𝟓 = 𝟑𝟓𝟑. 𝟐 𝑵 )2 18.8 El tambor tiene una masa de 50 kg y un radio de giro con respecto al pasador en O de Ko=0.23 m. Si del bloque de 15 kg desciende a 3m/s y se aplica una fuerza P=100N a la palanca de freno, determine que tanto desciende el bloque a partir del instante que se aplica el freno hasta que se detiene. Ignore el espesor de la palanca. El coeficiente de fricción cinética de la balata es Uk=0.5. Brazo de freno ∑. 𝑴𝑨 =0; -N(0.5)+100(1.25)=0 𝑵 = 𝟐𝟓𝟎𝑵 F=0.5(250) =125N 0.25 S´=s ( 𝑻𝟏 + ∑ 𝑼𝟏−𝟐 = 𝑻𝟐 ) 0.15 1 2 ( [(50)(0.23)2 ]( 0.25 0.15 3 0.15 )=0 𝑠 = 𝟗. 𝟕𝟓𝒎 )2 + 1 2 (15)(3)2 + 15(9.81)(𝑠) − 125(𝑠) 18.9 El carrete pesa 150 lb y su radio de giro es de Ko=2.25 pies. Si se enrolla una cuerda alrededor de su núcleo interno y el extremo se jala con una fuerza horizontal de P=40 lb, determine su velocidad angular después de que el centro O ha recorrido 10 pies a la derecha. El carrete comienza a moverse del reposo y no se desliza en A| cuando rueda. Ignore la masa de la cuerda. Cinemática: como el carrete rueda sin deslizarse, el centro instantáneo de cero la velocidad se localiza en el punto A. 𝑟𝑜 Vo=𝜔 𝐼𝐶 = 𝜔(3) Además, usando triángulos similares. 𝑆𝑃 5 = 10 3 Sp= 16.67 ft Diagrama de cuerpo libre: la fuerza de 40 lb hace un trabajo positivo ya que actúa en la misma dirección de su desplazamiento Sp. La reacción normal N y el peso del carrete no trabaja ya que no se desplazan. Principio de trabajo y energía: el momento de inercia de la masa del carrete sobre 𝟏𝟓𝟎 el punto O es Io=m𝒌𝒐𝟐 = (𝟑𝟐.𝟐) (𝟐. 𝟐𝟓)𝟐 = 𝟐𝟑. 𝟓𝟖 . 𝑻𝟏 + ∑ 𝑼𝟏−𝟐 = 𝑻𝟐 1 1 1 2 2 2 0+P(𝑆𝑃)= 𝑚𝑣 2 + 𝐼𝑂 𝑤 2 + 1 𝟏𝟓𝟎 1 0+40(16.67)= ( ) [𝝎(𝟑)]𝟐 + (23.58)𝝎𝟐 2 𝟑𝟐.𝟐 2 𝝎 = 𝟒. 𝟓𝟏 𝒓𝒂𝒅/𝒔 18.10 Un hombre que pesa 180 lb se sienta en una silla de la rueda de la fortuna, la cual, sin el hombre, pesa 15000 lb y su radio de giro es de Ko= 37 pies. Si se aplica un par de torsión M=80(103 )𝑙𝑏. 𝑝𝑖𝑒 con respecto a O, determine la velocidad angular de la rueda después de que gire 180°. Ignore el peso de las sillas y observe que el hombre permanece en posición vertical a medida que gira la rueda. La rueda comienza a girar desde el punto de reposo en posición que se muestra. 𝑻𝟏 + ∑ 𝑼𝟏−𝟐 = 𝑻𝟐 1 15000 2 32.2 0+800(103 )𝜋 − 180(120) = [( 1 180 ) (37)2 ]𝜔2 + 2 (32.2)(60𝜔)2 𝝎 = 𝟎. 𝟖𝟑𝟔 𝒓𝒂𝒅/𝒔 18.11 Un clavadista de 150 lb se enconcha en el extremo del trampolín como se muestra. En esta posición el radio de giro con respecto a su centro de gravedad es 𝐾𝐺 = 1.2 𝑝𝑖𝑒𝑠. Mientras mantiene esa posición cuando 𝜃 = 0°, gira sobre la punta de sus pies en A hasta que se pierde el contacto con el trampolín cuando 𝜃 = 90°. Si permanece rígido, determine aproximadamente cuantos giros realiza antes de chocar con el agua después de caer 30 pies. 𝑻𝟏 + ∑ 𝑼𝟏−𝟐 = 𝑻𝟐 1 𝟏𝟓𝟎 0+150(1.5) = ( ) [𝟏. 𝟓𝝎]𝟐 + 2 𝟑𝟐.𝟐 1 2 [( 𝟏𝟓𝟎 𝟑𝟐.𝟐 ) 𝟏. 𝟐𝟐 ]𝝎𝟐 𝝎 = 𝟓. 𝟏𝟏𝟕 𝒓𝒂𝒅 𝒔 𝑉𝐺 = (1.5)(5.117) 𝑽𝑮 = 𝟕. 𝟔𝟕𝟓 1 S=𝑆0 + 𝑉0 𝑡 + 𝑎𝑐 𝑡 2 2 1 30=0+7.675t + (32.2) 𝑡 2 2 T=1.147 s 1 𝜃=𝜃0 + 𝜔0 𝑡 + ∝𝑐 𝑡 2 2 𝜃=0+5.117(1.147) +0 𝜽=5.870 rad=0.934 rev 𝒇𝒕⁄ 𝑺 18.12 El carrete tiene una masa de 60kg y un radio de giro de Kg=0.3m. Si se suelta del reposo, determine que tanto desciende su centro del plano liso antes de que alcance una velocidad angular de 𝜔 = 6 𝑟𝑎𝑑 𝑠 . Ignore la fricción y la masa de la cuerda la cual se enrolla alrededor del núcleo central. 𝑻𝟏 + ∑ 𝑼𝟏−𝟐 = 𝑻𝟐 1 1 2 2 0+60(9.81) sen30°(s)= [𝟔𝟎(𝟎. 𝟑)𝟐 ](𝟔)𝟐 + S=0.661 m (60)[𝟎. 𝟑(𝟔)]𝟐 18.13 Resuelva el problema 18.12 si el coeficiente de fricción cinética entre el carrete y el plano A es Uk=0.2. 𝑆𝐺 𝑆𝐴 = 0.3 (0.5 − 0.3) 𝑆𝐴 = 𝑂. 667𝑆𝐺 ∑ 𝑭𝒀 = 𝟎 𝑵𝑨 − 𝟔𝟎(𝟗. 𝟖𝟏)𝑪𝑶𝑺𝟑𝟎° = 𝟎 𝑵𝑨 = 𝟓𝟎𝟗. 𝟕 𝑵 𝑻𝟏 + ∑ 𝑼𝟏−𝟐 = 𝑻𝟐 0+60(9.81) sen30° (𝑆𝐺 ) – 0.2(509.7) (0.6667𝑆𝐺 )= 1 1 [𝟔𝟎(𝟎. 𝟑)𝟐 ](𝟔)𝟐 + (60)[𝟎. 𝟑(𝟔)]𝟐 2 2 𝑺𝑮 = 𝟎. 𝟖𝟓𝟗 𝒎 18.14 El carrete pesa 500 lb y su radio de giro es de Kg=1.75 pies. Se aplica una fuerza horizontal P= 15 lb al cable enrollado alrededor de su núcleo interno. Si el carrete originalmente esta en reposo, determine su velocidad angular después de que el centro de masa G ha recorrido 6 pies a la izquierda. El carrete rueda sin deslizarse. Ignore la masa del cable. 𝑆𝐺 𝑆𝐴 = 2.4 3.2 Para 𝑺𝑮 = 𝟔 𝒇𝒕 𝑦 𝑆𝐴 = 𝟖𝒇𝒕 𝑻𝟏 + ∑ 𝑼𝟏−𝟐 = 𝑻𝟐 1 𝟓𝟎𝟎 0+15(8) = [ 2 𝟑𝟐.𝟐 )(𝟏. 𝟕𝟓)𝟐 ]𝝎𝟐 + 1 𝟓𝟎𝟎 [ 2 𝟑𝟐.𝟐 𝝎 = 𝟏. 𝟑𝟐 𝒓𝒂𝒅/𝒔 )(𝟐. 𝟒𝝎)𝟐 18.15 Si el sistema comienza a moverse a partir del punto de reposo, determine la velocidad de los cilindros de 20 kg A y B después de que A ha descendido a una distancia de 2 m. La polea diferencial tiene una masa de 15 kg con un radio de giro con respecto a su centro de masa de Ko=100 mm. Cinética trabajo y energía: la energía cinética en A y B es 1 1 2 2 𝑇𝑃 = 𝐼0 𝜔2 = [15(0.1)2 ] 𝜔2 𝑻𝑷 = 𝟎. 𝟎𝟕𝟓𝝎𝟐 1 1 𝑇𝐴 = 𝑀𝐴 𝑉 2𝐴 = (20)𝑉 2𝐴 2 2 1 1 2 2 𝑇𝐵 = 𝑀𝐵 𝑉 2 𝐵 = (20)𝑉 2 𝐵 𝑻𝑨 = 𝟏𝟎𝑽𝟐 𝑨 𝑻𝑩 =10𝑽𝟐 𝑩 La energía cinética del sistema es T=0.075𝜔2 + 10𝑉 2𝐴 +10𝑉 2 𝐵 𝑇 = 𝑇𝑃+ 𝑇𝐴 +𝑇𝐵 𝜔= 𝑉𝐴 𝑟𝐴 𝑉 𝐴 = 0.15 = 6.667 𝑉𝐴 𝑉𝐵 = 𝜔𝑟𝐵 = 6.667 𝑉𝐴 (0.075) = 0.5 𝑉𝐴 T=15.833𝑽𝟐 𝑨 𝑈𝐴=𝑊𝐴𝑆𝐴 𝜃= 𝑈𝐵=−𝑊𝐵𝑆𝐵 𝑆𝐴 𝑟𝐴 = 2 𝑆𝐴 = 2𝑚 =13.33 rad 0.15 𝑆𝐵 = 𝑟𝐵 𝜃 = 0.075(13.33) = 1𝑚 𝑈𝐴=𝑊𝐴𝑆𝐴 𝑈𝐵=−𝑊𝐵𝑆𝐵 𝑈𝐴= 20(9.81)(2) = 𝟑𝟗𝟒. 𝟐𝑱 𝑈𝐵=− 20(9.81)(1) = −𝟏𝟗𝟔. 𝟐 𝑱 PRINCIPIO DE TRABJO Y ENERGIA 𝑻𝟏 + ∑ 𝑼𝟏−𝟐 = 𝑻𝟐 0 + [392.4+(-196.2)]=15.833𝑽𝟐 𝑨 𝑽𝑨 = 𝟑. 𝟓𝟐𝟎 𝒎⁄𝒔 𝑽𝑩 = 𝟎. 𝟓(𝟑. 𝟓𝟐𝟎) = 𝟏. 𝟕𝟔 𝒎⁄𝒔