DYNAMICS OF ROTATIONAL MOTION 10.1. 10 IDENTIFY: Use Eq. (10.2) to calculate the magnitude of the torque and use the right-hand rule illustrated in Figure 10.4 in the textbook to calculate the torque direction. (a) SET UP: Consider Figure 10.1a. EXECUTE: τ = Fl l = rsinφ = (4.00 m)sin 90° l = 4.00 m τ = (10.0 N)(4.00 m) = 40.0 N ⋅ m Figure 10.1a G This force tends to produce a counterclockwise rotation about the axis; by the right-hand rule the vector τ is directed out of the plane of the figure. (b) SET UP: Consider Figure 10.1b. EXECUTE: τ = Fl l = rsinφ = (4.00 m)sin120° l = 3.464 m τ = (10.0 N)(3.464 m) = 34.6 N ⋅ m Figure 10.1b G This force tends to produce a counterclockwise rotation about the axis; by the right-hand rule the vector τ is directed out of the plane of the figure. (c) SET UP: Consider Figure 10.1c. EXECUTE: τ = Fl l = rsinφ = (4.00 m)sin 30° l = 2.00 m τ = (10.0 N)(2.00 m) = 20.0 N ⋅ m Figure 10.1c G This force tends to produce a counterclockwise rotation about the axis; by the right-hand rule the vector τ is directed out of the plane of the figure. © Copyright 2012 Pearson Education, Inc. All rights reserved. This material is protected under all copyright laws as they currently exist. No portion of this material may be reproduced, in any form or by any means, without permission in writing from the publisher. 10-1 10-2 Chapter 10 (d) SET UP: Consider Figure 10.1d. EXECUTE: τ = Fl l = rsinφ = (2.00 m)sin 60° = 1.732 m τ = (10.0 N)(1.732 m) = 17.3 N ⋅ m Figure 10.1d G This force tends to produce a clockwise rotation about the axis; by the right-hand rule the vector τ is directed into the plane of the figure. (e) SET UP: Consider Figure 10.1e. EXECUTE: τ = Fl r = 0 so l = 0 and τ = 0 Figure 10.1e (f) SET UP: Consider Figure 10.1f. EXECUTE: τ = Fl l = rsinφ , φ = 180°, so l = 0 and τ = 0 Figure 10.1f 10.2. EVALUATE: The torque is zero in parts (e) and (f) because the moment arm is zero; the line of action of the force passes through the axis. IDENTIFY: τ = Fl with l = rsinφ . Add the two torques to calculate the net torque. SET UP: Let counterclockwise torques be positive. EXECUTE: τ 1 = − F1l1 = −(8.00 N)(5.00 m) = −40.0 N ⋅ m. τ 2 = + F2l2 = (12.0 N)(2.00 m)sin30.0° = +12.0 N ⋅ m. ∑ τ = τ1 + τ 2 = −28.0 N ⋅ m. The net torque is 28.0 N ⋅ m, clockwise. EVALUATE: Even though F1 < F2 , the magnitude of τ1 is greater than the magnitude of τ 2 , because F1 10.3. has a larger moment arm. IDENTIFY and SET UP: Use Eq. (10.2) to calculate the magnitude of each torque and use the right-hand rule (Figure 10.4 in the textbook) to determine the direction. Consider Figure 10.3. Figure 10.3 Let counterclockwise be the positive sense of rotation. © Copyright 2012 Pearson Education, Inc. All rights reserved. This material is protected under all copyright laws as they currently exist. No portion of this material may be reproduced, in any form or by any means, without permission in writing from the publisher. Dynamics of Rotational Motion 10-3 EXECUTE: r1 = r2 = r3 = (0.090 m) 2 + (0.090 m) 2 = 0.1273 m τ1 = − F1l1 l1 = r1sinφ1 = (0.1273 m)sin135° = 0.0900 m τ1 = −(18.0 N)(0.0900 m) = −1.62 N ⋅ m G τ 1 is directed into paper τ 2 = + F2l2 l2 = r2 sinφ2 = (0.1273)sin135° = 0.0900 m τ 2 = + (26.0 N)(0.0900 m) = +2.34 N ⋅ m G τ 2 is directed out of paper τ 3 = + F3l3 l3 = r3sinφ3 = (0.1273 m)sin90° = 0.1273 m τ 3 = + (14.0 N)(0.1273 m) = +1.78 N ⋅ m G τ 3 is directed out of paper ∑τ = τ1 + τ 2 + τ 3 = − 1.62 N ⋅ m + 2.34 N ⋅ m + 1.78 N ⋅ m = 2.50 N ⋅ m 10.4. EVALUATE: The net torque is positive, which means it tends to produce a counterclockwise rotation; the vector torque is directed out of the plane of the paper. In summing the torques it is important to include + or − signs to show direction. IDENTIFY: Use τ = Fl = rFsinφ to calculate the magnitude of each torque and use the right-hand rule to determine the direction of each torque. Add the torques to find the net torque. SET UP: Let counterclockwise torques be positive. For the 11.9 N force ( F1 ), r = 0. For the 14.6 N force ( F2 ), r = 0.350 m and φ = 40.0°. For the 8.50 N force ( F3 ), r = 0.350 m and φ = 90.0°. τ1 = 0. τ 2 = −(14.6 N)(0.350 m)sin40.0° = −3.285 N ⋅ m. τ 3 = + (8.50 N)(0.350 m)sin90.0° = +2.975 N ⋅ m. ∑ τ = −3.285 N ⋅ m + 2.975 N ⋅ m = −0.31 N ⋅ m. The net EXECUTE: torque is 0.31 N ⋅ m and is clockwise. G G EVALUATE: If we treat the torques as vectors, τ 2 is into the page and τ 3 is out of the page. 10.5. IDENTIFY and SET UP: Calculate the torque using Eq. (10.3) and also determine the direction of the torque using the right-hand rule. G G (a) r = (−0.450 m)iˆ + (0.150 m) ˆj; F = ( −5.00 N) iˆ + (4.00 N) ˆj. The sketch is given in Figure 10.5. Figure 10.5 G G EXECUTE: (b) When the fingers of your right hand curl from the direction of r into the direction of F G (through the smaller of the two angles, angle φ ) your thumb points into the page (the direction of τ , the − z -direction). G G G (c) τ = r × F = [(−0.450 m)iˆ + (0.150 m)ˆj ] × [(− 5.00 N)iˆ + (4.00 N) ˆj ] G τ = + (2.25 N ⋅ m)iˆ × iˆ − (1.80 N ⋅ m) iˆ × ˆj − (0.750 N ⋅ m) ˆj × iˆ + (0.600 N ⋅ m) ˆj × ˆj iˆ × iˆ = ˆj × ˆj = 0 iˆ × ˆj = kˆ , ˆj × iˆ = − kˆ G Thus τ = − (1.80 N ⋅ m) kˆ − (0.750 N ⋅ m)(− kˆ ) = ( − 1.05 N ⋅ m) kˆ . © Copyright 2012 Pearson Education, Inc. All rights reserved. This material is protected under all copyright laws as they currently exist. No portion of this material may be reproduced, in any form or by any means, without permission in writing from the publisher. 10-4 10.6. 10.7. Chapter 10 G EVALUATE: The calculation gives that τ is in the − z -direction. This agrees with what we got from the right-hand rule. IDENTIFY: Knowing the force on a bar and the point where it acts, we want to find the position vector for the point where the force acts and the torque the force exerts on the bar. G G G G SET UP: The position vector is r = xiˆ + yˆj and the torque is τ = r × F . G EXECUTE: (a) Using x = 3.00 m and y = 4.00 m, we have r = (3.00)iˆ + (4.00) ˆj. G G G (b) τ = r × F = [(3.00 m)iˆ + (4.00 m) ˆj ] × [(7.00 N)iˆ + ( −3.00 N) ˆj ]. G τ = (−9.00 N ⋅ m)kˆ + (−28.0 N ⋅ m)(− kˆ ) = ( −37.0 N ⋅ m) kˆ. The torque has magnitude 37.0 N ⋅ m and is in the − z -direction. G G EVALUATE: Applying the right-hand rule for the vector product to r × F shows that the torque must be G G in the − z -direction because it is perpendicular to both r and F , which are both in the x-y plane. IDENTIFY: The total torque is the sum of the torques due to all the forces. SET UP: The torque due to a force is the product of the force times its moment arm: τ = Fl . Let counterclockwise torques be positive. EXECUTE: (a) τ A = + (50 N)(0.20 m)sin60° = +8.7 N ⋅ m, counterclockwise. τ B = 0. τ C = −(50 N)(0.20 m)sin 30° = −5.0 N ⋅ m, clockwise. τ D = −(50 N)(0.20 m)sin90° = −10.0 N ⋅ m, clockwise. (b) ∑ τ = τ A + τ B + τ C + τ D = −6.3 N ⋅ m, clockwise. 10.8. 10.9. EVALUATE: In the above solution, we used the force component perpendicular to the 20-cm line. We could also have constructed the component of the 20-cm line perpendicular to each force, but that would have been a bit more intricate. IDENTIFY: Use τ = Fl = rFsinφ for the magnitude of the torque and the right-hand rule for the direction. SET UP: In part (a), r = 0.250 m and φ = 37°. EXECUTE: (a) τ = (17.0 N)(0.250 m)sin37° = 2.56 N ⋅ m. The torque is counterclockwise. (b) The torque is maximum when φ = 90° and the force is perpendicular to the wrench. This maximum torque is (17.0 N)(0.250 m) = 4.25 N ⋅ m. EVALUATE: If the force is directed along the handle then the torque is zero. The torque increases as the angle between the force and the handle increases. IDENTIFY: Apply ∑τ z = Iα z . ⎛ 2π rad/rev ⎞ SET UP: ω0 z = 0. ω z = (400 rev/min) ⎜ ⎟ = 41.9 rad/s ⎝ 60 s/min ⎠ ω − ω0 z 41.9 rad/s EXECUTE: τ z = Iα z = I z = (2.50 kg ⋅ m 2 ) = 13.1 N ⋅ m. t 8.00 s EVALUATE: In τ z = I α z , α z must be in rad/s 2 . 10.10. IDENTIFY: The constant force produces a torque which gives a constant angular acceleration to the disk and a linear acceleration to points on the disk. SET UP: ∑τ z = Iα z applies to the disk, ω z2 = ω02z + 2α z (θ − θ 0 ) because the angular acceleration is constant. The acceleration components of the rim are atan = rα and arad = rω 2 , and the magnitude of the 2 2 + arad . acceleration is a = atan EXECUTE: (a) ∑τ z = Iα z gives Fr = Iα z . For a uniform disk, I= 1 1 Fr (30.0 N)(0.200 m) MR 2 = (40.0 kg)(0.200 m) 2 = 0.800 kg ⋅ m 2. α z = = = 7.50 rad/s 2 . I 2 2 0.800 kg ⋅ m 2 θ − θ 0 = 0.200 rev = 1.257 rad. ω0 z = 0, so ω z2 = ω02z + 2α z (θ − θ0 ) gives ω z = 2(7.50 rad/s 2 )(1.257 rad) = 4.342 rad/s. v = rω = (0.200 m)(4.342 rad/s) = 0.868 m/s. © Copyright 2012 Pearson Education, Inc. All rights reserved. This material is protected under all copyright laws as they currently exist. No portion of this material may be reproduced, in any form or by any means, without permission in writing from the publisher. Dynamics of Rotational Motion 10-5 (b) atan = rα = (0.200 m)(7.50 rad/s 2 ) = 1.50 m/s2 . arad = rω 2 = (0.200 m)(4.342 rad/s)2 = 3.771 m/s 2 . 2 2 a = atan + arad = 4.06 m/s 2 . 10.11. EVALUATE: The net acceleration is neither toward the center nor tangent to the disk. IDENTIFY: Use ∑τ z = Iα z to calculate α . Use a constant angular acceleration kinematic equation to relate α z , ω z and t. SET UP: For a solid uniform sphere and an axis through its center, I = 52 MR 2 . Let the direction the sphere is spinning be the positive sense of rotation. The moment arm for the friction force is l = 0.0150 m and the torque due to this force is negative. τ −(0.0200 N)(0.0150 m) = −14.8 rad/s 2 EXECUTE: (a) α z = z = 2 (0.225 kg)(0.0150 m) 2 I 5 (b) ω z − ω 0 z = −22.5 rad/s. ω z = ω0 z + α z t gives t = ω z − ω0 z −22.5 rad/s = = 1.52 s. αz −14.8 rad/s 2 EVALUATE: The fact that α z is negative means its direction is opposite to the direction of spin. The negative α z causes ω z to decrease. 10.12. IDENTIFY: Apply ∑τ z = Iα z to the wheel. The acceleration a of a point on the cord and the angular acceleration α of the wheel are related by a = Rα . SET UP: Let the direction of rotation of the wheel be positive. The wheel has the shape of a disk and I = 12 MR 2 . The free-body diagram for the wheel is sketched in Figure 10.12a for a horizontal pull and in Figure 10.12b for a vertical pull. P is the pull on the cord and F is the force exerted on the wheel by the axle. τ (40.0 N)(0.250 m) = 34.8 rad/s 2 . EXECUTE: (a) α z = z = 1 I (9.20 kg)(0.250 m) 2 2 a = Rα = (0.250 m)(34.8 rad/s 2 ) = 8.70 m/s 2 . (b) Fx = − P, Fy = Mg. F = P 2 + ( Mg ) 2 = (40.0 N) 2 + ([9.20 kg ][9.80 m/s 2 ]) 2 = 98.6 N. tanφ = | Fy | | Fx | = Mg (9.20 kg)(9.80 m/s 2 ) and φ = 66.1°. The force exerted by the axle has magnitude = P 40.0 N 98.6 N and is directed at 66.1° above the horizontal, away from the direction of the pull on the cord. (c) The pull exerts the same torque as in part (a), so the answers to part (a) don’t change. In part (b), F + P = Mg and F = Mg − P = (9.20 kg)(9.80 m/s 2 ) − 40.0 N = 50.2 N. The force exerted by the axle has magnitude 50.2 N and is upward. EVALUATE: The weight of the wheel and the force exerted by the axle produce no torque because they act at the axle. Figure 10.12 © Copyright 2012 Pearson Education, Inc. All rights reserved. This material is protected under all copyright laws as they currently exist. No portion of this material may be reproduced, in any form or by any means, without permission in writing from the publisher. 10-6 Chapter 10 10.13. G G IDENTIFY: Apply ∑ F = ma to each book and apply ∑τ z = Iα z to the pulley. Use a constant acceleration equation to find the common acceleration of the books. SET UP: m1 = 2.00 kg, m2 = 3.00 kg. Let T1 be the tension in the part of the cord attached to m1 and T2 be the tension in the part of the cord attached to m2 . Let the + x -direction be in the direction of the acceleration of each book. a = Rα . 2( x − x0 ) 2(1.20 m) EXECUTE: (a) x − x0 = v0 xt + 12 axt 2 gives a x = = = 3.75 m/s 2 . a1 = 3.75 m/s 2 so t2 (0.800 s) 2 T1 = m1a1 = 7.50 N and T2 = m2 ( g − a1 ) = 18.2 N. (b) The torque on the pulley is (T2 − T1 ) R = 0.803 N ⋅ m, and the angular acceleration is α = a1 /R = 50 rad/s 2 , so I = τ /α = 0.016 kg ⋅ m 2 . 10.14. EVALUATE: The tensions in the two parts of the cord must be different, so there will be a net torque on the pulley. G G IDENTIFY: Apply ∑ F = ma to the stone and ∑ τ z = I α z to the pulley. Use a constant acceleration equation to find a for the stone. SET UP: For the motion of the stone take + y to be downward. The pulley has I = 12 MR 2 . a = Rα . EXECUTE: (a) y − y0 = v0 yt + 12 a yt 2 gives 12.6 m = 12 a y (3.00 s)2 and a y = 2.80 m/s 2 . Then ∑ Fy = ma y applied to the stone gives mg − T = ma. ∑τ z = Iα z applied to the pulley gives TR = 12 MR 2α = 12 MR 2 (a /R). T = 12 Ma. Combining these two equations to eliminate T gives m= M 2 ⎞ ⎛ a ⎞ ⎛ 10.0 kg ⎞ ⎛ 2.80 m/s 2 = 2.00 kg. ⎜ ⎟=⎜ ⎟ ⎜⎜ 2 2⎟ − 2 g a ⎠ ⎝ 9.80 m/s − 2.80 m/s ⎠⎟ ⎝ ⎠ ⎝ 1 1 (b) T = Ma = (10.0 kg)(2.80 m/s 2 ) = 14.0 N 2 2 EVALUATE: The tension in the wire is less than the weight mg = 19.6 N of the stone, because the stone 10.15. has a downward acceleration. IDENTIFY: The constant force produces a torque which gives a constant angular acceleration to the wheel. SET UP: ω z = ω0 z + α z t because the angular acceleration is constant, and ∑τ z = Iα z applies to the wheel. EXECUTE: ω0 z = 0 and ω z = 12.0 rev/s = 75.40 rad/s. ω z = ω0 z + α z t , so 10.16. ω z − ω0 z 75.40 rad/s = = 37.70 rad/s 2 . ∑τ z = Iα z gives t 2.00 s Fr (80.0 N)(0.120 m) I= = = 0.255 kg ⋅ m 2 . αz 37.70 rad/s 2 EVALUATE: The units of the answer are the proper ones for moment of inertia. IDENTIFY: Apply ∑ Fy = ma y to the bucket, with + y downward. Apply ∑ τ z = I α z to the cylinder, with αz = the direction the cylinder rotates positive. SET UP: The free-body diagram for the bucket is given in Figure 10.16a and the free-body diagram for the cylinder is given in Figure 10.16b. I = 12 MR 2 . a(bucket) = Rα (cylinder) EXECUTE: (a) For the bucket, mg − T = ma. For the cylinder, ∑τ z = Iα z gives TR = 12 MR 2α . α = a /R then gives T = 12 Ma. Combining these two equations gives mg − 12 Ma = ma and a= ⎛ ⎞ mg 15.0 kg 2 2 =⎜ ⎟ (9.80 m/s ) = 7.00 m/s . m + M /2 ⎝ 15.0 kg + 6.0 kg ⎠ © Copyright 2012 Pearson Education, Inc. All rights reserved. This material is protected under all copyright laws as they currently exist. No portion of this material may be reproduced, in any form or by any means, without permission in writing from the publisher. Dynamics of Rotational Motion 10-7 T = m( g − a ) = (15.0 kg)(9.80 m/s 2 − 7.00 m/s 2 ) = 42.0 N. (b) v 2y = v02y + 2a y ( y − y0 ) gives v y = 2(7.00 m/s 2 )(10.0 m) = 11.8 m/s. (c) a y = 7.00 m/s 2 , v0 y = 0, y − y0 = 10.0 m. y − y0 = v0 yt + 12 α yt 2 gives t= 2( y − y0 ) 2(10.0 m) = = 1.69 s ay 7.00 m/s 2 (d) ∑ Fy = ma y applied to the cylinder gives n − T − Mg = 0 and n = T + mg = 42.0 N + (12.0 kg)(9.80 m/s 2 ) = 160 N. EVALUATE: The tension in the rope is less than the weight of the bucket, because the bucket has a downward acceleration. If the rope were cut, so the bucket would be in free fall, the bucket would strike 2(10.0 m) = 1.43 s and would have a final speed of 14.0 m/s. The presence of the the water in t = 9.80 m/s 2 cylinder slows the fall of the bucket. Figure 10.16 10.17. G G IDENTIFY: Apply ∑ F = ma to each box and ∑τ z = Iα z to the pulley. The magnitude a of the acceleration of each box is related to the magnitude of the angular acceleration α of the pulley by a = Rα . SET UP: The free-body diagrams for each object are shown in Figure 10.17a–c. For the pulley, R = 0.250 m and I = 12 MR 2 . T1 and T2 are the tensions in the wire on either side of the pulley. G m1 = 12.0 kg, m2 = 5.00 kg and M = 2.00 kg. F is the force that the axle exerts on the pulley. For the pulley, let clockwise rotation be positive. EXECUTE: (a) ∑ Fx = ma x for the 12.0 kg box gives T1 = m1a. ∑ Fy = ma y for the 5.00 kg weight gives m2 g − T2 = m2a. ∑τ z = Iα z for the pulley gives (T2 − T1 ) R = ( 1 MR 2 2 )α . a = Rα and T2 − T1 = 12 Ma. Adding these three equations gives m2 g = (m1 + m2 + 12 M ) a and ⎛ ⎞ ⎛ ⎞ m2 5.00 kg 2 2 a=⎜ ⎟g =⎜ ⎟ (9.80 m/s ) = 2.72 m/s . Then 1 ⎜ m1 + m2 + M ⎟ . + . + . 12 0 kg 5 00 kg 1 00 kg ⎝ ⎠ ⎝ ⎠ 2 T1 = m1a = (12.0 kg)(2.72 m/s 2 ) = 32.6 N. m2 g − T2 = m2a gives T2 = m2 ( g − a ) = (5.00 kg)(9.80 m/s 2 − 2.72 m/s2 ) = 35.4 N. The tension to the left of the pulley is 32.6 N and below the pulley it is 35.4 N. (b) a = 2.72 m/s 2 (c) For the pulley, ∑ Fx = max gives Fx = T1 = 32.6 N and ∑ Fy = ma y gives Fy = Mg + T2 = (2.00 kg)(9.80 m/s 2 ) + 35.4 N = 55.0 N. EVALUATE: The equation m2 g = (m1 + m2 + 12 M )a says that the external force m2 g must accelerate all three objects. © Copyright 2012 Pearson Education, Inc. All rights reserved. This material is protected under all copyright laws as they currently exist. No portion of this material may be reproduced, in any form or by any means, without permission in writing from the publisher. 10-8 Chapter 10 Figure 10.17 10.18. IDENTIFY: The tumbler has kinetic energy due to the linear motion of his center of mass plus kinetic energy due to his rotational motion about his center of mass. SET UP: vcm = Rω. ω = 0.50 rev/s = 3.14 rad/s. I = 12 MR 2 with R = 0.50 m. K cm = 12 Mv 2cm and K rot = 12 I cmω 2 . EXECUTE: (a) K tot = K cm + K rot with K cm = 12 Mv 2cm and K rot = 12 I cmω 2 . ycm = Rω = (0.50 m)(3.14 rad/s) = 1.57 m/s. K cm = 12 (75 kg)(1.57 m/s)2 = 92.4 J. K rot = 12 I cmω 2 = 14 MR 2ω 2 = 14 Mv 2cm = 46.2 J. K tot = 92.4 J + 46.2 J = 140 J. (b) 10.19. K rot 46.2 J = = 33%. K tot 140 J EVALUATE: The kinetic energy due to the gymnast’s rolling motion makes a substantial contribution (33%) to his total kinetic energy. IDENTIFY: Since there is rolling without slipping, vcm = Rω. The kinetic energy is given by Eq. (10.8). The velocities of points on the rim of the hoop are as described in Figure 10.13 in Chapter 10. SET UP: ω = 3.00 rad/s and R = 0.600 m. For a hoop rotating about an axis at its center, I = MR 2 . EXECUTE: (a) vcm = Rω = (0.600 m)(3.00 rad/s) = 1.80 m/s. 2 2 2 (b) K = 12 Mvcm + 12 I ω 2 = 12 Mvcm + 12 ( MR 2 )(vcm /R 2 ) = Mvcm = (2.20 kg)(1.80 m/s) 2 = 7.13 J G (c) (i) v = 2vcm = 3.60 m/s. v is to the right. (ii) v = 0 G 2 2 2 (iii) v = vcm + vtan = vcm + ( Rω ) 2 = 2vcm = 2.55 m/s. v at this point is at 45° below the horizontal. 10.20. (d) To someone moving to the right at v = vcm , the hoop appears to rotate about a stationary axis at its center. (i) v = Rω = 1.80 m/s, to the right. (ii) v = 1.80 m/s, to the left. (iii) v = 1.80 m/s, downward. EVALUATE: For the special case of a hoop, the total kinetic energy is equally divided between the motion of the center of mass and the rotation about the axis through the center of mass. In the rest frame of the ground, different points on the hoop have different speed. IDENTIFY: Only gravity does work, so Wother = 0 and conservation of energy gives K1 + U1 = K 2 + U 2 . 2 K 2 = 12 Mvcm + 12 I cmω 2 . SET UP: Let y2 = 0, so U 2 = 0 and y1 = 0.750 m. The hoop is released from rest so K1 = 0. vcm = Rω. For a hoop with an axis at its center, I cm = MR 2 . EXECUTE: (a) Conservation of energy gives U1 = K 2 . K 2 = 12 MR 2ω 2 + 12 ( MR 2 )ω 2 = MR 2ω 2, so gy1 (9.80 m/s 2 )(0.750 m) = = 33.9 rad/s. R 0.0800 m (b) v = Rω = (0.0800 m)(33.9 rad/s) = 2.71 m/s MR 2ω 2 = Mgy1. ω = © Copyright 2012 Pearson Education, Inc. All rights reserved. This material is protected under all copyright laws as they currently exist. No portion of this material may be reproduced, in any form or by any means, without permission in writing from the publisher. Dynamics of Rotational Motion 10-9 EVALUATE: An object released from rest and falling in free fall for 0.750 m attains a speed of 2 g (0.750 m) = 3.83 m/s. The final speed of the hoop is less than this because some of its energy is in 10.21. kinetic energy of rotation. Or, equivalently, the upward tension causes the magnitude of the net force of the hoop to be less than its weight. IDENTIFY: Apply Eq. (10.8). SET UP: For an object that is rolling without slipping, vcm = Rω. EXECUTE: The fraction of the total kinetic energy that is rotational is (1/2) I cmω 2 2 (1/2) Mvcm 2 + (1/2) I cmω 2 = 1 2 1 + ( M/I cm )vcm /ω 2 = 1 1 + ( MR 2 /I cm ) (a) I cm = (1/2) MR , so the above ratio is 1/3. (b) I cm = (2/5) MR 2 so the above ratio is 2/7. (c) I cm = (2/3) MR 2 so the ratio is 2/5. (d) I cm = (5/8) MR 2 so the ratio is 5/13. 10.22. EVALUATE: The moment of inertia of each object takes the form I = β MR 2 . The ratio of rotational 1 β . The ratio increases as β increases. = kinetic energy to total kinetic energy can be written as 1 + 1/β 1 + β G G IDENTIFY: Apply ∑ F = ma to the translational motion of the center of mass and ∑τ z = Iα z to the rotation about the center of mass. SET UP: Let + x be down the incline and let the shell be turning in the positive direction. The free-body diagram for the shell is given in Figure 10.22. From Table 9.2, I cm = 23 mR 2 . EXECUTE: (a) ∑ Fx = max gives mg sin β − f = macm . ∑τ z = Iα z gives fR = ( 23 mR2 )α . With α = acm /R this becomes f = 23 macm . Combining the equations gives mg sinβ − 23 macm = macm and 3g sinβ 3(9.80 m/s 2 )(sin38.0°) = = 3.62 m/s 2 . f = 23 macm = 23 (2.00 kg)(3.62 m/s 2 ) = 4.83 N. The 5 5 friction is static since there is no slipping at the point of contact. n = mg cos β = 15.45 N. acm = f 4.83 N = = 0.313. n 15.45 N (b) The acceleration is independent of m and doesn’t change. The friction force is proportional to m so will double; f = 9.66 N. The normal force will also double, so the minimum μ s required for no slipping wouldn’t change. EVALUATE: If there is no friction and the object slides without rolling, the acceleration is g sinβ . Friction and rolling without slipping reduce a to 0.60 times this value. μs = Figure 10.22 © Copyright 2012 Pearson Education, Inc. All rights reserved. This material is protected under all copyright laws as they currently exist. No portion of this material may be reproduced, in any form or by any means, without permission in writing from the publisher. 10-10 10.23. Chapter 10 G G IDENTIFY: Apply ∑ Fext = macm and ∑ τ z = I cmα z to the motion of the ball. (a) SET UP: The free-body diagram is given in Figure 10.23a. EXECUTE: ∑ Fy = ma y n = mg cosθ and fs = μs mg cosθ ∑ Fx = max mg sin θ − μ s mg cos θ = ma g (sinθ − μs cosθ ) = a (eq. 1) Figure 10.23a SET UP: Consider Figure 10.23b. n and mg act at the center of the ball and provide no torque. Figure 10.23b EXECUTE: ∑ τ = τ f = μs mg cosθ R; I = 52 mR 2 ∑ τ z = I cmα z gives μs mg cos θ R = 52 mR 2α No slipping means α = a /R, so μs g cosθ = 52 a (eq.2) We have two equations in the two unknowns a and μs . Solving gives a = 75 g sin θ and μs = 72 tanθ = 72 tan 65.0° = 0.613. (b) Repeat the calculation of part (a), but now I = 23 mR 2 . a = 35 g sin θ and μs = 25 tanθ = 52 tan 65.0° = 0.858 The value of μs calculated in part (a) is not large enough to prevent slipping for the hollow ball. (c) EVALUATE: There is no slipping at the point of contact. More friction is required for a hollow ball since for a given m and R it has a larger I and more torque is needed to provide the same α . Note that the required μ s is independent of the mass or radius of the ball and only depends on how that mass is 10.24. distributed. IDENTIFY: Apply conservation of energy to the motion of the marble. SET UP: K = 12 mv 2 + 12 I ω 2 , with I = 52 MR 2 . vcm = Rω for no slipping. Let y = 0 at the bottom of the bowl. The marble at its initial and final locations is sketched in Figure 10.24. 1 1 EXECUTE: (a) Motion from the release point to the bottom of the bowl: mgh = mv 2 + I ω 2 . 2 2 2 1 1⎛ 2 10 ⎞⎛ v ⎞ mgh = mv 2 + ⎜ mR 2 ⎟⎜ ⎟ and v = gh . 2 2⎝ 5 7 R ⎠⎝ ⎠ © Copyright 2012 Pearson Education, Inc. All rights reserved. This material is protected under all copyright laws as they currently exist. No portion of this material may be reproduced, in any form or by any means, without permission in writing from the publisher. Dynamics of Rotational Motion 10-11 Motion along the smooth side: The rotational kinetic energy does not change, since there is no friction 10 gh 1 v2 5 torque on the marble, mv 2 + K rot = mgh′ + K rot . h′ = = 7 = h 2 2g 2g 7 (b) mgh = mgh′ so h′ = h. EVALUATE: (c) With friction on both halves, all the initial potential energy gets converted back to potential energy. Without friction on the right half some of the energy is still in rotational kinetic energy when the marble is at its maximum height. Figure 10.24 10.25. IDENTIFY: Apply conservation of energy to the motion of the wheel. SET UP: The wheel at points 1 and 2 of its motion is shown in Figure 10.25. Take y = 0 at the center of the wheel when it is at the bottom of the hill. Figure 10.25 2 The wheel has both translational and rotational motion so its kinetic energy is K = 12 I cmω 2 + 12 Mvcm . EXECUTE: K1 + U1 + Wother = K 2 + U 2 Wother = Wfric = −3500 J (the friction work is negative) K1 = 12 I ω12 + 12 Mv12 ; v = Rω and I = 0.800MR 2 so K1 = 12 (0.800) MR 2ω12 + 12 MR 2ω12 = 0.900MR 2ω12 K 2 = 0, U1 = 0, U 2 = Mgh Thus 0.900MR 2ω12 + Wfric = Mgh M = w/g = 392 N/(9.80 m/s 2 ) = 40.0 kg h= h= 10.26. 0.900MR 2ω12 + Wfric Mg (0.900)(40.0 kg)(0.600 m)2 (25.0 rad/s)2 − 3500 J = 11.7 m (40.0 kg)(9.80 m/s 2 ) EVALUATE: Friction does negative work and reduces h. G G IDENTIFY: Apply ∑τ z = Iα z and ∑ F = ma to the motion of the bowling ball. SET UP: acm = Rα . fs = μs n. Let + x be directed down the incline. EXECUTE: (a) The free-body diagram is sketched in Figure 10.26. The angular speed of the ball must decrease, and so the torque is provided by a friction force that acts up the hill. © Copyright 2012 Pearson Education, Inc. All rights reserved. This material is protected under all copyright laws as they currently exist. No portion of this material may be reproduced, in any form or by any means, without permission in writing from the publisher. 10-12 Chapter 10 G G (b) The friction force results in an angular acceleration, given by Iα = fR. ∑ F = ma applied to the motion of the center of mass gives mg sinβ − f = macm , and the acceleration and angular acceleration are related by acm = Rα . I ⎞ ⎛ Combining, mg sinβ = macm ⎜1 + = macm (7/5). acm = (5/7) g sinβ . ⎝ mR 2 ⎟⎠ 2 2 (c) From either of the above relations between f and acm , f = macm = mg sinβ ≤ μs n = μs mgcosβ. 5 7 μs ≥ (2/7)tanβ . EVALUATE: If μs = 0, acm = mg sin β . acm is less when friction is present. The ball rolls farther uphill when friction is present, because the friction removes the rotational kinetic energy and converts it to gravitational potential energy. In the absence of friction the ball retains the rotational kinetic energy that is has initially. Figure 10.26 10.27. IDENTIFY: As the cylinder falls, its potential energy is transformed into both translational and rotational kinetic energy. Its mechanical energy is conserved. SET UP: The hollow cylinder has I = 12 m( Ra2 + Rb2 ), where Ra = 0.200 m and Rb = 0.350 m. Use coordinates where + y is upward and y = 0 at the initial position of the cylinder. Then y1 = 0 and y2 = − d , where d is the distance it has fallen. vcm = Rω. K cm = 12 Mv 2cm and K rot = 12 I cmω 2 . EXECUTE: (a) Conservation of energy gives K1 + U1 = K 2 + U 2 . K1 = 0, U1 = 0. 0 = U 2 + K 2 and 0 = − mgd + 1 2 ( 1 mv 2cm 2 + 12 I cmω 2 . ) 1 Iω 2 2 = 1 + 12 [1 + ( Ra /Rb ) 2 ] v 2cm = gd and d = ( 1 1 m[ R 2 a 2 2 (1 + 1 [1 + 2 ) + Rb2 ] (vcm /Rb ) 2 = 14 m[1 + ( Ra /Rb ) 2 ]v 2cm, so ) ( Ra /Rb ) 2 ] v 2cm 2g = (1 + 0.663)(6.66 m/s) 2 2(9.80 m/s 2 ) = 3.76 m. (b) K 2 = 12 mv 2cm since there is no rotation. So mgd = 12 mv 2cm which gives vcm = 2 gd = 2(9.80 m/s 2 )(3.76 m) = 8.58 m/s. (c) In part (a) the cylinder has rotational as well as translational kinetic energy and therefore less translational speed at a given kinetic energy. The kinetic energy comes from a decrease in gravitational potential energy and that is the same, so in (a) the translational speed is less. EVALUATE: If part (a) were repeated for a solid cylinder, Ra = 0 and d = 3.39 m. For a thin-walled 10.28. hollow cylinder, Ra = Rb and d = 4.52 cm. Note that all of these answers are independent of the mass m of the cylinder. IDENTIFY: At the top of the hill the wheel has translational and rotational kinetic energy plus gravitational potential energy. The potential energy is transformed into additional kinetic energy as the wheel rolls down the hill. © Copyright 2012 Pearson Education, Inc. All rights reserved. This material is protected under all copyright laws as they currently exist. No portion of this material may be reproduced, in any form or by any means, without permission in writing from the publisher. Dynamics of Rotational Motion 10-13 SET UP: The wheel has I = MR 2, with M = 2.25 kg and R = 0.425 m. Rolling without slipping means vcm = Rω for the wheel. Initially the wheel has vcm,1 = 11.0 m/s. Use coordinates where + y is upward and y = 0 at the bottom of the hill, so y1 = 75.0 m and y2 = 0. The total kinetic energy of the wheel is K = 12 mv 2cm + 12 I cmω 2 and its potential energy is U = mgh. EXECUTE: (a) Conservation of energy gives K1 + U1 = K 2 + U 2 . 2 ⎛v ⎞ K = 12 mv 2cm + 12 I cmω 2 = 12 mv 2cm + 12 (mR 2 ) ⎜ cm ⎟ = mv 2cm. Therefore K1 = mv 2cm,1 and K 2 = mv 2cm,2 . ⎝ R ⎠ U1 = mgy1, U 2 = mgy2 = 0, so mgy1 + mv 2cm,1 = mv 2cm,2 . Solving for vcm,2 gives 2 vcm,2 = vcm,1 + gy1 = (11.0 m/s)2 + (9.80 m/s 2 )(75.0 m) = 29.3 m/s. 2 (b) From (b) we have K 2 = mvcm,2 = (2.25 kg)(29.3 m/s)2 = 1.93 × 103 J. 10.29. EVALUATE: Because of the shape of the wheel (thin-walled cylinder), the kinetic energy is shared equally between the translational and rotational forms. This is not true for other shapes, such as solid disks or spheres. IDENTIFY: As the ball rolls up the hill, its kinetic energy (translational and rotational) is transformed into gravitational potential energy. Since there is no slipping, its mechanical energy is conserved. SET UP: The ball has moment of inertia I cm = 23 mR 2 . Rolling without slipping means vcm = Rω. Use coordinates where + y is upward and y = 0 at the bottom of the hill, so y1 = 0 and y2 = h = 5.00 m. The ball’s kinetic energy is K = 1 mv 2cm 2 + 12 I cmω 2 and its potential energy is U = mgh. EXECUTE: (a) Conservation of energy gives K1 + U1 = K 2 + U 2 . U1 = 0, K 2 = 0 (the ball stops). Therefore K1 = U 2 and 5 mv 2cm 6 ω= 1 mv 2cm + 12 I cmω 2 2 = mgh. Therefore vcm = 6 gh = 5 = mgh. 1 I ω2 2 cm = ( 1 2 mR 2 2 3 ) ⎛⎜⎝ vR ⎞⎟⎠ cm 2 = 13 mv 2cm so 6(9.80 m/s 2 )(5.00 m) = 7.67 m/s and 5 vcm 7.67 m/s = = 67.9 rad/s. R 0.113 m (b) K rot = 12 I ω 2 = 13 mv 2cm = 13 (0.426 kg)(7.67 m/s)2 = 8.35 J. EVALUATE: Its translational kinetic energy at the base of the hill is 1 mv 2cm 2 = 32 K rot = 12.52 J. Its total kinetic energy is 20.9 J, which equals its final potential energy: 10.30. mgh = (0.426 kg)(9.80 m/s 2 )(5.00 m) = 20.9 J. IDENTIFY: Apply P = τω and W = τΔθ . SET UP: P must be in watts, Δθ must be in radians, and ω must be in rad/s. 1 rev = 2π rad. 1 hp = 746 W. π rad/s = 30 rev/min. (175 hp)(746 W/hp) = 519 N ⋅ m. ⎛ π rad/s ⎞ (2400 rev/min) ⎜ ⎟ ⎝ 30 rev/min ⎠ (b) W = τΔθ = (519 N ⋅ m)(2π rad) = 3260 J EXECUTE: (a) τ = 10.31. P ω = EVALUATE: ω = 40 rev/s, so the time for one revolution is 0.025 s. P = 1.306 × 105 W, so in one revolution, W = Pt = 3260 J, which agrees with our result. (a) IDENTIFY: Use Eq. (10.7) to find α z and then use a constant angular acceleration equation to find ω z . SET UP: The free-body diagram is given in Figure 10.31. © Copyright 2012 Pearson Education, Inc. All rights reserved. This material is protected under all copyright laws as they currently exist. No portion of this material may be reproduced, in any form or by any means, without permission in writing from the publisher. 10-14 Chapter 10 EXECUTE: Apply ∑τ z = Iα z to find the angular acceleration: FR = Iα z αz = FR (18.0 N)(2.40 m) = = 0.02057 rad/s 2 2 I 2100 kg ⋅ m Figure 10.31 SET UP: Use the constant α z kinematic equations to find ω z . ω z = ?; ω0z (initially at rest); α z = 0.02057 rad/s 2 ; t = 15.0 s EXECUTE: ω z = ω0 z + α z t = 0 + (0.02057 rad/s 2 )(15.0 s) = 0.309 rad/s (b) IDENTIFY and SET UP: Calculate the work from Eq. (10.21), using a constant angular acceleration equation to calculate θ − θ 0 , or use the work-energy theorem. We will do it both ways. EXECUTE: (1) W = τ z Δθ (Eq. (10.21)) Δθ = θ − θ 0 = ω0 z t + 12 α z t 2 = 0 + 12 (0.02057 rad/s 2 )(15.0 s) 2 = 2.314 rad τ z = FR = (18.0 N)(2.40 m) = 43.2 N ⋅ m Then W = τ z Δθ = (43.2 N ⋅ m)(2.314 rad) = 100 J. or (2) Wtot = K 2 − K1 (the work-energy relation from Chapter 6) Wtot = W , the work done by the child K1 = 0; K 2 = 12 I ω 2 = 12 (2100 kg ⋅ m 2 )(0.309 rad/s)2 = 100 J Thus W = 100 J, the same as before. EVALUATE: Either method yields the same result for W. (c) IDENTIFY and SET UP: Use Eq. (6.15) to calculate Pav . ΔW 100 J = = 6.67 W Δt 15.0 s EVALUATE: Work is in joules, power is in watts. IDENTIFY: The power output of the motor is related to the torque it produces and to its angular velocity by P = τ zω z , where ω z must be in rad/s. EXECUTE: Pav = 10.32. SET UP: The work output of the motor in 60.0 s is ω z = 2500 rev/min = 262 rad/s. 100 W = 0.382 N ⋅ m ω z 262 rad/s EVALUATE: For a constant power output, the torque developed decreases when the rotation speed of the motor increases. IDENTIFY: Apply ∑τ z = Iα z and constant angular acceleration equations to the motion of the wheel. SET UP: 1 rev = 2π rad. π rad/s = 30 rev/min. ω − ω0 z EXECUTE: (a) τ z = Iα z = I z . t τz = EXECUTE: 10.33. P 2 6.00 kJ (9.00 kJ) = 6.00 kJ, so P = = 100 W. 3 60.0 s = rad/s ⎞ ((1/2)(1.50 kg)(0.100 m) ) (1200 rev/min) ⎛⎜⎝ 30π rev/min ⎟⎠ 2 τz = (b) ωav Δt = 2.5 s = 0.377 N ⋅ m (600 rev/min)(2.5 s) = 25.0 rev = 157 rad. 60 s/min © Copyright 2012 Pearson Education, Inc. All rights reserved. This material is protected under all copyright laws as they currently exist. No portion of this material may be reproduced, in any form or by any means, without permission in writing from the publisher. Dynamics of Rotational Motion 10-15 (c) W = τΔθ = (0.377 N ⋅ m)(157 rad) = 59.2 J. ( 10.34. 2 ) 1 2 1 ⎛ ⎛ π rad/s ⎞ ⎞ I ω = (1/2)(1.5 kg)(0.100 m)2 ⎜ (1200 rev/min) ⎜ = 59.2 J. ⎝ 30 rev/min ⎟⎠ ⎟⎠ ⎝ 2 2 the same as in part (c). EVALUATE: The agreement between the results of parts (c) and (d) illustrates the work-energy theorem. IDENTIFY: Apply ∑τ z = Iα z to the motion of the propeller and then use constant acceleration equations to analyze the motion. W = τΔθ . (d) K = 1 mL2 = 1 (117 kg)(2.08 m) 2 = 42.2 kg ⋅ m 2 . SET UP: I = 12 12 EXECUTE: (a) α = τ I = 1950 N ⋅ m 42.2 kg ⋅ m 2 = 46.2 rad/s 2 . (b) ω z2 = ω02z + 2α z (θ − θ 0 ) gives ω = 2αθ = 2(46.2 rad/s 2 )(5.0 rev)(2π rad/rev) = 53.9 rad/s. (c) W = τθ = (1950 N ⋅ m)(5.00 rev)(2π rad/rev) = 6.13 × 104 J. ω z − ω0 z 53.9 rad/s W 6.13 × 104 J = = 1 . 17 s. P = = = 52.5 kW. av αz Δt 1.17 s 46.2 rad/s 2 EVALUATE: P = τω. τ is constant and ω is linear in t, so Pav is half the instantaneous power at the end (d) t = of the 5.00 revolutions. We could also calculate W from W = ΔK = 12 I ω 2 = 12 (42.2 kg ⋅ m 2 )(53.9 rad/s) 2 = 6.13 × 104 J. 10.35. (a) IDENTIFY and SET UP: Use Eq. (10.23) and solve for τ z . P = τ zω z , where ω z must be in rad/s EXECUTE: τz = P ωz = ω z = (4000 rev/min)(2π rad/1 rev)(1 min/60 s) = 418.9 rad/s 1.50 × 105 W = 358 N ⋅ m 418.9 rad/s G G (b) IDENTIFY and SET UP: Apply ∑ F = ma to the drum. Find the tension T in the rope using τ z from part (a). The system is sketched in Figure 10.35. EXECUTE: v constant implies a = 0 and T = w τ z = TR implies T = τ z /R = 358 N ⋅ m/0.200 m = 1790 N Thus a weight w = 1790 N can be lifted. Figure 10.35 (c) IDENTIFY and SET UP: Use v = Rω. EXECUTE: The drum has ω = 418.9 rad/s, so v = (0.200 m)(418.9 rad/s) = 83.8 m/s. EVALUATE: The rate at which T is doing work on the drum is P = Tv = (1790 N)(83.8 m/s) = 150 kW. 10.36. This agrees with the work output of the motor. IDENTIFY: L = Iω and I = I disk + I woman . SET UP: ω = 0.50 rev/s = 3.14 rad/s. I disk = 12 mdisk R 2 and I woman = mwoman R 2. EXECUTE: I = (55 kg + 50.0 kg)(4.0 m) 2 = 1680 kg ⋅ m 2 . L = (1680 kg ⋅ m 2 )(3.14 rad/s) = 5.28 × 103 kg ⋅ m 2 /s 10.37. EVALUATE: The disk and the woman have similar values of I, even though the disk has twice the mass. (a) IDENTIFY: Use L = mvr sin φ (Eq. (10.25)): SET UP: Consider Figure 10.37. © Copyright 2012 Pearson Education, Inc. All rights reserved. This material is protected under all copyright laws as they currently exist. No portion of this material may be reproduced, in any form or by any means, without permission in writing from the publisher. 10-16 Chapter 10 EXECUTE: L = mvrsinφ = (2.00 kg)(12.0 m/s)(8.00 m)sin143.1° L = 115 kg ⋅ m 2 /s Figure 10.37 10.38. G G G To find the direction of L apply the right-hand rule by turning r into the direction of v by pushing on it G with the fingers of your right hand. Your thumb points into the page, in the direction of L. (b) IDENTIFY and SET UP: By Eq. (10.26) the rate of change of the angular momentum of the rock equals the torque of the net force acting on it. EXECUTE: τ = mg (8.00 m) cos 36.9° = 125 kg ⋅ m 2 /s 2 G G G To find the direction of τ and hence of dL/dt , apply the right-hand rule by turning r into the direction of the gravity force by pushing on it with the fingers of your right hand. Your thumb points out of the page, in G the direction of dL/dt. G G EVALUATE: L and dL/dt are in opposite directions, so L is decreasing. The gravity force is accelerating the rock downward, toward the axis. Its horizontal velocity is constant but the distance l is decreasing and hence L is decreasing. IDENTIFY: Lz = I ω z SET UP: For a particle of mass m moving in a circular path at a distance r from the axis, I = mr 2 and v = rω. For a uniform sphere of mass M and radius R and an axis through its center, I = 52 MR 2 . The earth has mass mE = 5.97 × 1024 kg, radius RE = 6.38 × 106 m and orbit radius r = 1.50 × 1011 m. The earth completes one rotation on its axis in 24 h = 86,400 s and one orbit in 1 y = 3.156 × 107 s. ⎛ 2π rad ⎞ 40 2 EXECUTE: (a) Lz = Iω z = mr 2ω z = (5.97 × 1024 kg)(1.50 × 1011 m)2 ⎜ ⎟ = 2.67 × 10 kg ⋅ m /s. ⎝ 3.156 × 107 s ⎠ The radius of the earth is much less than its orbit radius, so it is very reasonable to model it as a particle for this calculation. ⎛ 2π rad ⎞ (b) Lz = I ω z = ( 52 MR 2 )ω = 25 (5.97 × 1024 kg)(6.38 × 106 m) 2 ⎜ = 7.07 × 1033 kg ⋅ m 2 /s ⎝ 86,400 s ⎟⎠ 10.39. EVALUATE: The angular momentum associated with each of these motions is very large. IDENTIFY and SET UP: Use L = I ω . EXECUTE: The second hand makes 1 revolution in 1 minute, so ω = (1.00 rev/min)(2π rad/1 rev)(1 min/60 s) = 0.1047 rad/s. For a slender rod, with the axis about one end, I = 13 ML2 = 13 (6.00 × 10−3 kg)(0.150 m) 2 = 4.50 × 10−5 kg ⋅ m 2 . 10.40. Then L = I ω = (4.50 × 10−5 kg ⋅ m 2 )(0.1047 rad/s) = 4.71 × 10−6 kg ⋅ m 2 /s. G EVALUATE: L is clockwise. IDENTIFY: ω z = dθ /dt. Lz = I ω z and τ z = dLz /dt. SET UP: For a hollow, thin-walled sphere rolling about an axis through its center, I = 23 MR 2 . R = 0.240 m. EXECUTE: (a) A = 1.50 rad/s 2 and B = 1.10 rad/s 4 , so that θ (t ) will have units of radians. (b) (i) ω z = dθ = 2 At + 4 Bt 3. At t = 3.00 s, dt ω z = 2(1.50 rad/s 2 )(3.00 s) + 4(1.10 rad/s4 )(3.00 s)3 = 128 rad/s. © Copyright 2012 Pearson Education, Inc. All rights reserved. This material is protected under all copyright laws as they currently exist. No portion of this material may be reproduced, in any form or by any means, without permission in writing from the publisher. Dynamics of Rotational Motion 10-17 Lz = ( 23 MR 2 )ω z = 23 (12.0 kg)(0.240 m) 2 (128 rad/s) = 59.0 kg ⋅ m 2 /s. (ii) τ z = dLz dω z =I = I (2 A + 12 Bt 2 ) and dt dt τ z = 23 (12.0 kg)(0.240 m)2 (2[1.50 rad/s 2 ] + 12[1.10 rad/s 4 ][3.00 s]2 ) = 56.1 N ⋅ m. EVALUATE: The angular speed of rotation is increasing. This increase is due to an acceleration α z that is produced by the torque on the sphere. When I is constant, as it is here, τ z = dLz /dt = Idω z /dt = I α z and 10.41. Eqs. (10.29) and (10.7) are identical. IDENTIFY: Apply conservation of angular momentum. SET UP: For a uniform sphere and an axis through its center, I = 52 MR 2 . EXECUTE: The moment of inertia is proportional to the square of the radius, and so the angular velocity will be proportional to the inverse of the square of the radius, and the final angular velocity is 2 2 ⎛ R1 ⎞ ⎛ ⎞ ⎛ 7.0 × 105 km ⎞ 2π rad 3 ⎟⎟ = 4.6 × 10 rad/s. ⎟ =⎜ ⎟ ⎜⎜ R (30 d)(86 , 400 s/d) 16 km ⎠⎝ ⎝ 2⎠ ⎝ ⎠ ω2 = ω1 ⎜ EVALUATE: K = 12 I ω 2 = 12 Lω. L is constant and ω increases by a large factor, so there is a large 10.42. increase in the rotational kinetic energy of the star. This energy comes from potential energy associated with the gravity force within the star. G IDENTIFY and SET UP: L is conserved if there is no net external torque. Use conservation of angular momentum to find ω at the new radius and use K = 12 I ω 2 to find the change in kinetic energy, which is equal to the work done on the block. EXECUTE: (a) Yes, angular momentum is conserved. The moment arm for the tension in the cord is zero so this force exerts no torque and there is no net torque on the block. (b) L1 = L2 so I1ω1 = I 2ω2 . Block treated as a point mass, so I = mr 2, where r is the distance of the block from the hole. mr12ω1 = mr22ω2 2 2 ⎛ r1 ⎞ ⎛ 0.300 m ⎞ ⎟ ω1 = ⎜ ⎟ (1.75 rad/s) = 7.00 rad/s ⎝ 0.150 m ⎠ ⎝ r2 ⎠ ω2 = ⎜ (c) K1 = 12 I1ω12 = 12 mr12ω12 = 12 mv12 v1 = r1ω1 = (0.300 m)(1.75 rad/s) = 0.525 m/s K1 = 12 mv12 = 12 (0.0250 kg)(0.525 m/s) 2 = 0.00345 J K 2 = 12 mv22 v2 = r2ω2 = (0.150 m)(7.00 rad/s) = 1.05 m/s K 2 = 12 mv22 = 12 (0.0250 kg)(1.05 m/s)2 = 0.01378 J ΔK = K 2 − K1 = 0.01378 J − 0.00345 J = 0.0103 J (d) Wtot = ΔK 10.43. But Wtot = W , the work done by the tension in the cord, so W = 0.0103 J. EVALUATE: Smaller r means smaller I. L = I ω is constant so ω increases and K increases. The work done by the tension is positive since it is directed inward and the block moves inward, toward the hole. IDENTIFY: Apply conservation of angular momentum to the motion of the skater. SET UP: For a thin-walled hollow cylinder I = mR 2 . For a slender rod rotating about an axis through its 1 ml 2 . center, I = 12 EXECUTE: Li = Lf so I iωi = I f ωf . © Copyright 2012 Pearson Education, Inc. All rights reserved. This material is protected under all copyright laws as they currently exist. No portion of this material may be reproduced, in any form or by any means, without permission in writing from the publisher. 10-18 Chapter 10 1 (8.0 kg)(1.8 m) 2 = 2.56 kg ⋅ m 2 . I = 0.40 kg ⋅ m 2 + (8.0 kg)(0.25 m) 2 = 0.90 kg ⋅ m 2 . I i = 0.40 kg ⋅ m 2 + 12 f ⎛ 2.56 kg ⋅ m 2 ⎞ ⎛ Ii ⎞ (0.40 rev/s) = 1.14 rev/s. ⎟ ωi = ⎜⎜ 2⎟ ⎟ ⎝ If ⎠ ⎝ 0.90 kg ⋅ m ⎠ ωf = ⎜ EVALUATE: K = 12 I ω 2 = 12 Lω. ω increases and L is constant, so K increases. The increase in kinetic 10.44. energy comes from the work done by the skater when he pulls in his hands. IDENTIFY and SET UP: Apply conservation of angular momentum to the diver. SET UP: The number of revolutions she makes in a certain time is proportional to her angular velocity. The ratio of her untucked to tucked angular velocity is (3.6 kg ⋅ m 2 )/(18 kg ⋅ m 2 ). EXECUTE: If she had tucked, she would have made (2 rev)(3.6 kg ⋅ m 2 )/(18 kg ⋅ m 2 ) = 0.40 rev in the last 1.0 s, so she would have made (0.40 rev)(1.5/1.0) = 0.60 rev in the total 1.5 s. 10.45. EVALUATE: Untucked she rotates slower and completes fewer revolutions. IDENTIFY and SET UP: There is no net external torque about the rotation axis so the angular momentum L = I ω is conserved. EXECUTE: (a) L1 = L2 gives I1ω1 = I 2ω2 , so ω2 = ( I1 /I 2 )ω1 I1 = I tt = 12 MR 2 = 12 (120 kg)(2.00 m) 2 = 240 kg ⋅ m 2 I 2 = I tt + I p = 240 kg ⋅ m 2 + mR 2 = 240 kg ⋅ m 2 + (70 kg)(2.00 m)2 = 520 kg ⋅ m 2 ω2 = ( I1 /I 2 )ω1 = (240 kg ⋅ m 2 /520 kg ⋅ m 2 )(3.00 rad/s) = 1.38 rad/s (b) K1 = 12 I1ω12 = 12 (240 kg ⋅ m 2 )(3.00 rad/s) 2 = 1080 J K 2 = 12 I 2ω22 = 12 (520 kg ⋅ m2 )(1.38 rad/s)2 = 495 J 10.46. EVALUATE: The kinetic energy decreases because of the negative work done on the turntable and the parachutist by the friction force between these two objects. The angular speed decreases because I increases when the parachutist is added to the system. IDENTIFY: Apply conservation of angular momentum to the collision. SET UP: Let the width of the door be l. The initial angular momentum of the mud is mv (l /2), since it strikes the door at its center. For the axis at the hinge, I door = 13 Ml 2 and I mud = m(l /2) 2 . EXECUTE: ω = ω= 10.47. L mv(l /2) . = I (1/3) Ml 2 + m(l /2) 2 (0.500 kg)(12.0 m/s)(0.500 m) = 0.223 rad/s. (1/3)(40.0 kg)(1.00 m) 2 + (0.500 kg)(0.500 m) 2 Ignoring the mass of the mud in the denominator of the above expression gives ω = 0.225 rad/s, so the mass of the mud in the moment of inertia does affect the third significant figure. EVALUATE: Angular momentum is conserved but there is a large decrease in the kinetic energy of the system. G (a) IDENTIFY and SET UP: Apply conservation of angular momentum L, with the axis at the nail. Let object A be the bug and object B be the bar. Initially, all objects are at rest and L1 = 0. Just after the bug jumps, it has angular momentum in one direction of rotation and the bar is rotating with angular velocity ωB in the opposite direction. EXECUTE: L2 = m Av Ar − I BωB where r = 1.00 m and I B = 13 mB r 2 L1 = L2 gives m Av Ar = 13 mB r 2ω B ωB = 3m Av A = 0.120 rad/s mB r © Copyright 2012 Pearson Education, Inc. All rights reserved. This material is protected under all copyright laws as they currently exist. No portion of this material may be reproduced, in any form or by any means, without permission in writing from the publisher. Dynamics of Rotational Motion (b) K1 = 0; K 2 = 12 m Av 2A + 12 I BωB2 = 1 (0.0100 2 10.48. kg)(0.200 m/s) 2 + ( 1 1 [0.0500 2 3 10-19 ) kg][1.00 m]2 (0.120 rad/s)2 = 3.2 × 10−4 J. (c) The increase in kinetic energy comes from work done by the bug when it pushes against the bar in order to jump. EVALUATE: There is no external torque applied to the system and the total angular momentum of the system is constant. There are internal forces, forces the bug and bar exert on each other. The forces exert torques and change the angular momentum of the bug and the bar, but these changes are equal in magnitude and opposite in direction. These internal forces do positive work on the two objects and the kinetic energy of each object and of the system increases. IDENTIFY: Apply conservation of angular momentum to the system of earth plus asteroid. SET UP: Take the axis to be the earth’s rotation axis. The asteroid may be treated as a point mass and it has zero angular momentum before the collision, since it is headed toward the center of the earth. For the earth, Lz = I ω z and I = 25 MR 2 , where M is the mass of the earth and R is its radius. The length of a day is T= 2π rad ω , where ω is the earth’s angular rotation rate. EXECUTE: Conservation of angular momentum applied to the collision between the earth and asteroid ⎛ ω1 − ω 2 ⎞ 1 1.250 gives 25 MR 2ω1 = ( mR 2 + 25 MR 2 )ω2 and m = 52 M ⎜ = and ⎟ . T = 1.250T1 gives ⎜ ω2 ⎟ 2 ω2 ω1 ⎝ ⎠ ω − ω2 ω1 = 1.250ω2 . 1 = 0.250. m = 52 (0.250) M = 0.100 M . ω2 10.49. EVALUATE: If the asteroid hit the surface of the earth tangentially it could have some angular momentum with respect to the earth’s rotation axis, and could either speed up or slow down the earth’s rotation rate. IDENTIFy: Apply conservation of angular momentum to the collision. SET UP: The system before and after the collision is sketched in Figure 10.49. Let counterclockwise rotation be positive. The bar has I = 13 m2 L2 . EXECUTE: (a) Conservation of angular momentum: m1v0d = − m1vd + 13 m2 L2ω. 1 ⎛ 90.0 N ⎞ 2 (3.00 kg)(10.0 m/s)(1.50 m) = − (3.00 kg)(6.00 m/s)(1.50 m) + ⎜ ⎟ (2.00 m) ω 3 ⎝ 9.80 m/s 2 ⎠ ω = 5.88 rad/s. (b) There are no unbalanced torques about the pivot, so angular momentum is conserved. But the pivot exerts an unbalanced horizontal external force on the system, so the linear momentum is not conserved. EVALUATE: Kinetic energy is not conserved in the collision. Figure 10.49 10.50. IDENTIFY: As the bug moves outward, it increases the moment of inertia of the rod-bug system. The angular momentum of this system is conserved because no unbalanced external torques act on it. 1 SET UP: The moment of inertia of the rod is I = ML2 , and conservation of angular momentum gives 3 I1ω1 = I 2ω2 . © Copyright 2012 Pearson Education, Inc. All rights reserved. This material is protected under all copyright laws as they currently exist. No portion of this material may be reproduced, in any form or by any means, without permission in writing from the publisher. 10-20 Chapter 10 1 3I 3(3.00 × 10−3 kg ⋅ m 2 ) EVALUATE: (a) I = ML2 gives M = 2 = = 0.0360 kg. 3 L (0.500 m) 2 (b) L1 = L2 , so I1ω1 = I 2ω2 . ω2 = v 0.160 m/s = = 0.320 rad/s, so r 0.500 m (3.00 × 10−3 kg ⋅ m 2 )(0.400 rad/s) = (3.00 × 10−3 kg ⋅ m 2 + mbug (0.500 m) 2 )(0.320 rad/s). mbug = 10.51. (3.00 × 10−3 kg ⋅ m 2 )(0.400 rad/s − 0.320 rad/s) (0.320 rad/s)(0.500 m) 2 = 3.00 × 10−3 kg. EVALUATE: This is a 3.00 mg bug, which is not unreasonable. IDENTIFY: If we take the raven and the gate as a system, the torque about the pivot is zero, so the angular momentum of the system about the pivot is conserved. SET UP: The system before and after the collision is sketched in Figure 10.51. The gate has I = 13 ML2 . Take counterclockwise torques to be positive. Figure 10.51 EXECUTE: (a) The gravity forces exert no torque at the moment of collision and angular momentum is conserved. L1 = L2 . mv1l = − mv2l + I gateω with l = L/2. ω= m(v1 + v2 )l 1 ML2 3 = 3m(v1 + v2 ) 3(1.1 kg)(5.0 m/s + 2.0 m/s) = = 1.71 rad/s. 2 ML 2(4.5 kg)(1.5 m) (b) Linear momentum is not conserved; there is an external force exerted by the pivot. But the force on the pivot has zero torque. There is no external torque and angular momentum is conserved. EVALUATE: K1 = 12 (1.1 kg)(5.0 m/s)2 = 13.8 J. K 2 = 12 (1.1 kg)(2.0 m/s)2 + 12 ( 13 [4.5 kg][1.5 m/s]2 )(1.71 rad/s)2 = 7.1 J. This is an inelastic collision and K 2 < K1. 10.52. IDENTIFY: The angular momentum of Sedna is conserved as it moves in its orbit. SET UP: The angular momentum of Sedna is L = mvl . EXECUTE: (a) L = mvl so v1l1 = v2l2 . When v1 = 4.64 km/s, l1 = 76 AU. ⎛l ⎞ ⎛ 76 AU ⎞ v2 = v1 ⎜ 1 ⎟ = (4.64 km/s) ⎜ ⎟ = 0.374 km/s. ⎝ 942 AU ⎠ ⎝ l2 ⎠ (b) Since vl is constant the maximum speed is at the minimum distance and the minimum speed is at the maximum distance. 2 (c) 2 2 ⎛ v ⎞ ⎛ l ⎞ ⎛ 942 AU ⎞2 K1 12 mv1 = =⎜ 1⎟ =⎜ 2⎟ =⎜ ⎟ = 154. 2 K 2 1 mv2 ⎝ v2 ⎠ ⎝ l1 ⎠ ⎝ 76 AU ⎠ 2 © Copyright 2012 Pearson Education, Inc. All rights reserved. This material is protected under all copyright laws as they currently exist. No portion of this material may be reproduced, in any form or by any means, without permission in writing from the publisher. Dynamics of Rotational Motion 10.53. 10-21 EVALUATE: Since the units of l cancel in the ratios there is no need to convert from AU to m. The gravity force of the sun does work on Sedna as it moves toward or away from the sun and this changes the kinetic energy during the orbit. But this force exerts no torque, so the angular momentum of Sedna is constant. G G wr IDENTIFY: The precession angular velocity is Ω = , where ω is in rad/s. Also apply ∑ F = ma to the Iω gyroscope. SET UP: The total mass of the gyroscope is mr + mf = 0.140 kg + 0.0250 kg = 0.165 kg. Ω= 2π rad 2π rad = = 2.856 rad/s. T 2.20 s EXECUTE: (a) Fp = wtot = (0.165 kg)(9.80 m/s 2 ) = 1.62 N wr (0.165 kg)(9.80 m/s 2 )(0.0400 m) = = 189 rad/s = 1.80 × 103 rev/min I Ω (1.20 × 10−4 kg ⋅ m 2 )(2.856 rad/s) G G (c) If the figure in the problem is viewed from above, τ is in the direction of the precession and L is along the axis of the rotor, away from the pivot. EVALUATE: There is no vertical component of acceleration associated with the motion, so the force from the pivot equals the weight of the gyroscope. The larger ω is, the slower the rate of precession. IDENTIFY: The precession angular speed is related to the acceleration due to gravity by Eq. (10.33), with w = mg . (b) ω = 10.54. SET UP: Ω E = 0.50 rad/s, g E = g and g M = 0.165 g . For the gyroscope, m, r, I, and ω are the same on the moon as on the earth. Ω Ω mgr Ω mr = = constant, so E = M . EXECUTE: Ω = . gE gM Iω g Iω ⎛g ⎞ Ω M = Ω E ⎜ M ⎟ = 0.165Ω E = (0.165)(0.50 rad/s) = 0.0825 rad/s. ⎝ gE ⎠ EVALUATE: In the limit that g → 0 the precession rate → 0. 10.55. 10.56. IDENTIFY and SET UP: Apply Eq. (10.33). EXECUTE: (a) halved (b) doubled (assuming that the added weight is distributed in such a way that r and I are not changed) (c) halved (assuming that w and r are not changed) (d) doubled (e) unchanged. EVALUATE: Ω is directly proportional to w and r and is inversely proportional to I and ω. IDENTIFY: An external torque will cause precession of the telescope. SET UP: I = MR 2 , with R = 2.5 × 10−2 m. 1.0 × 10−6 degree = 1.745 × 10−8 rad. ω = 19,200 rpm = 2.01 × 103 rad/s. t = 5.0 h = 1.8 × 104 s. EXECUTE: Ω = Δφ 1.745 × 10−8 rad τ = = 9.694 × 10−13 rad/s. Ω = so τ = ΩI ω = ΩMR 2ω. Putting in Δt Iω 1.8 × 104 s the numbers gives τ = (9.694 × 10−13 rad/s)(2.0 kg)(2.5 × 10−2 m) 2 (2.01 × 103 rad/s) = 2.4 × 10−12 N ⋅ m. 10.57. EVALUATE: The external torque must be very small for this degree of stability. IDENTIFY: Apply ∑τ z = Iα z and constant acceleration equations to the motion of the grindstone. SET UP: Let the direction of rotation of the grindstone be positive. The friction force is f = μ k n and ⎛ 2π rad ⎞⎛ 1 min ⎞ 2 2 1 produces torque fR . ω = (120rev/min) ⎜ ⎟⎜ ⎟ = 4π rad/s. I = 2 MR = 1.69 kg ⋅ m . 1 rev 60 s ⎝ ⎠⎝ ⎠ EXECUTE: (a) The net torque must be τ = Iα = I ω z − ω0 z t = (1.69 kg ⋅ m 2 ) 4π rad/s = 2.36 N ⋅ m. 9.00 s © Copyright 2012 Pearson Education, Inc. All rights reserved. This material is protected under all copyright laws as they currently exist. No portion of this material may be reproduced, in any form or by any means, without permission in writing from the publisher. 10-22 Chapter 10 This torque must be the sum of the applied force FR and the opposing frictional torques τ f at the axle and fR = μ k nR due to the knife. F = 1 (τ + τ f + μ k nR ). R 1 ((2.36 N ⋅ m) + (6.50 N ⋅ m) + (0.60)(160 N)(0.260 m)) = 67.6 N. 0.500 m (b) To maintain a constant angular velocity, the net torque τ is zero, and the force F′ is 1 F′ = (6.50 N ⋅ m + 24.96 N ⋅ m) = 62.9 N. 0.500 m F= (c) The time t needed to come to a stop is found by taking the magnitudes in Eq. (10.29), with τ = τ f ω I (4π rad/s)(1.69 kg ⋅ m 2 ) = = 3.27 s. τf τf 6.50 N ⋅ m EVALUATE: The time for a given change in ω is proportional to α , which is in turn proportional to the constant; t = L = net torque, so the time in part (c) can also be found as t = (9.00 s) 10.58. 2.36 N ⋅ m . 6.50 N ⋅ m IDENTIFY: Apply ∑τ z = Iα z and use the constant acceleration equations to relate α to the motion. SET UP: Let the direction the wheel is rotating be positive. 100 rev/min = 10.47 rad/s ω − ω0 z 10.47 rad/s − 0 = = 5.235 rad/s 2 . EXECUTE: (a) ω z = ω0 z + α z t gives α z = z 2.00 s t ∑τ z 7.00 N ⋅ m I= = = 1.34 kg ⋅ m 2 . α z 5.235 rad/s 2 (b) ω0 z = 10.47 rad/s, ω z = 0, t = 125 s. ω z = ω0 z + α z t gives αz = ω z − ω0 z t = 0 − 10.47 rad/s = −0.0838 rad/s 2 . Applying ∑τ z = Iα z gives 125 s ∑τ z = Iα z = (1.34 kg ⋅ m 2 )( −0.0838 rad/s 2 ) = −0.112 N ⋅ m. ⎛ ω + ω z ⎞ ⎛ 10.47 rad/s + 0 ⎞ (c) θ = ⎜ 0 z ⎟t = ⎜ ⎟ (125 s) = 654 rad = 104 rev. 2 2 ⎝ ⎠ ⎝ ⎠ EVALUATE: The applied net torque (7.00 N ⋅ m) is much larger than the magnitude of the friction torque (0.112 N ⋅ m), so the time of 2.00 s that it takes the wheel to reach an angular speed of 100 rev/min is 10.59. much less than the 125 s it takes the wheel to be brought to rest by friction. IDENTIFY: Use the kinematic information to solve for the angular acceleration of the grindstone. Assume that the grindstone is rotating counterclockwise and let that be the positive sense of rotation. Then apply Eq. (10.7) to calculate the friction force and use f k = μ k n to calculate μ k . SET UP: ω0 z = 850 rev/min(2π rad/1 rev)(1 min/60 s) = 89.0 rad/s t = 7.50 s; ω z = 0 (comes to rest); α z = ? EXECUTE: ω z = ω0 z + α zt 0 − 89.0 rad/s = − 11.9 rad/s 2 7.50 s SET UP: Apply ∑τ z = Iα z to the grindstone. The free-body diagram is given in Figure 10.59. αz = Figure 10.59 © Copyright 2012 Pearson Education, Inc. All rights reserved. This material is protected under all copyright laws as they currently exist. No portion of this material may be reproduced, in any form or by any means, without permission in writing from the publisher. Dynamics of Rotational Motion 10-23 The normal force has zero moment arm for rotation about an axis at the center of the grindstone, and therefore zero torque. The only torque on the grindstone is that due to the friction force f k exerted by the ax; for this force the moment arm is l = R and the torque is negative. EXECUTE: ∑τ z = − f k R = − μ k nR I = 12 MR 2 (solid disk, axis through center) Thus ∑τ z = Iα z gives − μ k nR = ( 12 MR 2 )α z MRα z (50.0 kg)(0.260 m)( − 11.9 rad/s 2 ) =− = 0.483 2n 2(160 N) EVALUATE: The friction torque is clockwise and slows down the counterclockwise rotation of the grindstone. IDENTIFY: Use a constant acceleration equation to calculate α z and then apply ∑τ z = Iα z . μk = − 10.60. SET UP: I = 23 MR 2 + 2mR 2, where M = 8.40 kg, m = 2.00 kg, so I = 0.600 kg ⋅ m 2 . ω0 z = 75.0 rpm = 7.854 rad/s; ωz = 50.0 rpm = 5.236 rad/s; t = 30.0 s. EXECUTE: ωz = ω0z + α zt gives αz = −0.08726 rad/s 2. τ z = Iαz = −0.0524 N ⋅ m 10.61. EVALUATE: The torque is negative because its direction is opposite to the direction of rotation, which must be the case for the speed to decrease. IDENTIFY: Use a constant angular acceleration equation to calculate α z and then apply ∑τ z = Iα z to the motion of the cylinder. f k = μ k n. SET UP: I = 12 mR 2 = 12 (8.25 kg)(0.0750 m) 2 = 0.02320 kg ⋅ m 2. Let the direction the cylinder is rotating be positive. ω0 z = 220 rpm = 23.04 rad/s; ωz = 0; θ − θ0 = 5.25 rev = 33.0 rad. EXECUTE: ωz2 = ω02z + 2αz (θ − θ0 ) gives α z = −8.046 rad/s 2 . ∑ τ z = τ f = − f k R = − μk nR. Then ∑τ z = Iα z Iα z = 7.47 N. μk R EVALUATE: The friction torque is directed opposite to the direction of rotation and therefore produces an angular acceleration that slows the rotation. 2 IDENTIFY: The kinetic energy of the disk is K = 12 Mvcm + 12 I ω 2 . As it falls its gravitational potential gives − μk nR = Iα z and n = − 10.62. energy decreases and its kinetic energy increases. The only work done on the disk is the work done by gravity, so K1 + U1 = K 2 + U 2 . SET UP: I cm = 12 M ( R22 + R12 ), where R1 = 0.300 m and R2 = 0.500 m. vcm = R2ω. Take y1 = 0, so y2 = −2.20 m. EXECUTE: K1 + U1 = K 2 + U 2 . K1 = 0, U1 = 0. K 2 = − U 2 . 1 I ω2 2 cm 2 1 Mvcm 2 + 12 I cmω 2 = − Mgy2 . 2 2 2 = 14 M (1 + [ R1/R2 ]2 )vcm = 0.340Mvcm . Then 0.840 Mvcm = − Mgy2 and − gy2 −(9.80 m/s 2 )(−2.20 m) = = 5.07 m/s. 0.840 0.840 EVALUATE: A point mass in free fall acquires a speed of 6.57 m/s after falling 2.20 m. The disk has a value of vcm that is less than this, because some of the original gravitational potential energy has been vcm = 10.63. converted to rotational kinetic energy. IDENTIFY: Use ∑τ z = Iα z to find the angular acceleration just after the ball falls off and use conservation of energy to find the angular velocity of the bar as it swings through the vertical position. 1 m L2 , where m SET UP: The axis of rotation is at the axle. For this axis the bar has I = 12 bar = 3.80 kg bar and L = 0.800 m. Energy conservation gives K1 + U1 = K 2 + U 2 . The gravitational potential energy of the bar doesn’t change. Let y1 = 0, so y2 = − L/2. © Copyright 2012 Pearson Education, Inc. All rights reserved. This material is protected under all copyright laws as they currently exist. No portion of this material may be reproduced, in any form or by any means, without permission in writing from the publisher. 10-24 Chapter 10 2 1 m L2 + m EXECUTE: (a) τ z = mball g ( L /2) and I = I ball + I bar = 12 bar ball ( L/2) . ∑τ z = Iα z gives αz = mball g ( L/2) 2 1 m L2 + m ball ( L/2) 12 bar 2 = ⎞ 2g ⎛ mball ⎜ ⎟ and L ⎝ mball + mbar /3 ⎠ ⎞ 2(9.80 m/s ) ⎛ 2.50 kg 2 ⎜ ⎟ = 16.3 rad/s . 0.800 m ⎝ 2.50 kg + [3.80 kg]/3 ⎠ (b) As the bar rotates, the moment arm for the weight of the ball decreases and the angular acceleration of the bar decreases. (c) K1 + U1 = K 2 + U 2 . 0 = K 2 + U 2 . 12 ( I bar + I ball )ω 2 = − mball g (− L /2). αz = ω= 2 mball gL 2 mball L /4 + mbar L /12 = ⎞ ⎞ g⎛ 4mball 9.80 m/s 2 ⎛ 4[2.50 kg] ⎜ ⎟= ⎜ ⎟ L ⎝ mball + mbar /3 ⎠ 0.800 m ⎝ 2.50 kg + [3.80 kg]/3 ⎠ ω = 5.70 rad/s. EVALUATE: As the bar swings through the vertical, the linear speed of the ball that is still attached to the bar is v = (0.400 m)(5.70 rad/s) = 2.28 m/s. A point mass in free-fall acquires a speed of 2.80 m/s after 10.64. falling 0.400 m; the ball on the bar acquires a speed less than this. IDENTIFY: Use ∑τ z = Iα z to find α z , and then use the constant α z kinematic equations to solve for t. SET UP: The door is sketched in Figure 10.64. EXECUTE: ∑τ z = Fl = (220 N)(1.25 m) = 275 N ⋅ m From Table 9.2(d), I = 13 Ml 2 I = 13 (750 N/9.80 m/s 2 )(1.25 m) 2 = 39.9 kg ⋅ m 2 Figure 10.64 ∑τ z = Iα z so α z = ∑τ z 275 N ⋅ m = = 6.89 rad/s 2 I 39.9 kg ⋅ m 2 SET UP: α z = 6.89 rad/s 2 ; θ − θ0 = 90°(π rad/180°) = π /2 rad; ω0 z = 0 (door initially at rest); t = ? θ − θ 0 = ω0 z t + 12 α zt 2 EXECUTE: t = 10.65. 2(θ − θ0 ) 2(π /2 rad) = 0.675 s 6.89 rad/s 2 EVALUATE: The forces and the motion are connected through the angular acceleration. IDENTIFY: Calculate W using the procedure specified in the problem. In part (c) apply the work-energy theorem. In part (d), atan = Rα and ∑τ z = Iα z . arad = Rω 2 . SET UP: Let θ be the angle the disk has turned through. The moment arm for F is Rcosθ . EXECUTE: (a) The torque is τ = FRcosθ . W =∫ π /2 0 αz − FRcosθ dθ = FR. (b) In Eq. (6.14), dl is the horizontal distance the point moves, and so W = F ∫ dl = FR, the same as part (a). (c) From K 2 = W = ( MR 2 /4)ω 2 , ω = 4 F/MR . (d) The torque, and hence the angular acceleration, is greatest when θ = 0, at which point α = (τ /I ) = 2 F/MR, and so the maximum tangential acceleration is 2 F/M . (e) Using the value for ω found in part (c), arad = ω 2 R = 4 F/M . © Copyright 2012 Pearson Education, Inc. All rights reserved. This material is protected under all copyright laws as they currently exist. No portion of this material may be reproduced, in any form or by any means, without permission in writing from the publisher. Dynamics of Rotational Motion 10-25 EVALUATE: atan = α R is maximum initially, when the moment arm for F is a maximum, and it is zero after the disk has rotated one-quarter of a revolution. arad is zero initially and is a maximum at the end of 10.66. the motion, after the disk has rotated one-quarter of a revolution. IDENTIFY: Apply ∑τ z = Iα z , where τ z is due to the gravity force on the object. SET UP: I = I rod + I clay . I rod = 13 ML2 . In part (b), I clay = ML2 . In part (c), I clay = 0. EXECUTE: (a) A distance L/4 from the end with the clay. (b) In this case I = (4/3) ML2 and the gravitational torque is (3L/4)(2 Mg )sinθ = (3MgL/2)sinθ , so α = (9 g/ 8 L)sinθ . (c) In this case I = (1/3) ML2 and the gravitational torque is ( L/4)(2Mg )sinθ = ( MgL/ 2)sinθ , so α = (3 g/2 L )sinθ . 10.67. This is greater than in part (b). (d) The greater the angular acceleration of the upper end of the cue, the faster you would have to react to overcome deviations from the vertical. EVALUATE: In part (b), I is 4 times larger than in part (c) and τ is 3 times larger. α = τ /I , so the net effect is that α is smaller in (b) than in (c). IDENTIFY: Blocks A and B have linear acceleration and therefore obey the linear form of Newton’s second law ∑ Fy = ma y . The wheel C has angular acceleration, so it obeys the rotational form of Newton’s second law ∑ τ z = I α z . SET UP: A accelerates downward, B accelerates upward and the wheel turns clockwise. Apply ∑ Fy = ma y to blocks A and B. Let +y be downward for A and +y be upward for B. Apply ∑ τ z = I α z to the wheel, with the clockwise sense of rotation positive. Each block has the same magnitude of acceleration, a, and a = Rα . Call the TA the tension in the cord between C and A and TB the tension between C and B. EXECUTE: For A, ∑ Fy = ma y gives m A g − TA = m Aa. For B, ∑ Fy = ma y gives TB − mB g = mB a. For ⎛ I ⎞ the wheel, ∑ τ z = I α z gives TA R − TB R = Iα = I ( a/R) w and TA − TB = ⎜ 2 ⎟ a. Adding these three ⎝R ⎠ I ⎞ ⎛ equations gives (m A − mB ) g = ⎜ m A + mB + 2 ⎟ a. Solving for a, we have R ⎠ ⎝ ⎛ ⎞ ⎛ ⎞ m A − mB 4.00 kg − 2.00 kg 2 2 a=⎜ g = ⎜⎜ ⎟ 2 2 2 ⎟⎟ (9.80 m/s ) = 0.730 m/s . ⎜ m + m + I/R ⎟ 4 00 kg 2 00 kg (0 300 kg m )/(0 120 m) . + . + . ⋅ . ⎝ ⎠ B ⎝ A ⎠ α= a 0.730 m/s 2 = = 6.08 rad/s 2 . R 0.120 m TA = m A ( g − a ) = (4.00 kg)(9.80 m/s 2 − 0.730 m/s 2 ) = 36.3 N. TB = mB ( g + a ) = (2.00 kg)(9.80 m/s 2 + 0.730 m/s 2 ) = 21.1 N. 10.68. EVALUATE: The tensions must be different in order to produce a torque that accelerates the wheel when the blocks accelerate. G G IDENTIFY: Apply ∑ F = ma to the crate and ∑τ z = Iα z to the cylinder. The motions are connected by a (crate) = Rα (cylinder). SET UP: The force diagram for the crate is given in Figure 10.68a. EXECUTE: Applying ∑ Fy = ma y gives T − mg = ma. Solving for T gives T = m( g + a ) = (50 kg)(9.80 m/s 2 + 1.40 m/s 2 ) = 560 N. Figure 10.68a © Copyright 2012 Pearson Education, Inc. All rights reserved. This material is protected under all copyright laws as they currently exist. No portion of this material may be reproduced, in any form or by any means, without permission in writing from the publisher. 10-26 Chapter 10 SET UP: The force diagram for the cylinder is given in Figure 10.68b. EXECUTE: ∑ τ z = I α z gives Fl − TR = Iα z , where l = 0.12 m and R = 0.25 m. a = Rα so α z = a/R. Therefore Fl = TR + Ia/R. Figure 10.68b 10.69. 2 2 ⎛ R ⎞ Ia ⎛ 0.25 m ⎞ (2.9 kg ⋅ m )(1.40 m/s ) = (560 N) ⎜ + = 1300 N. F =T⎜ ⎟ + ⎟ ⎝ l ⎠ Rl ⎝ 0.12 m ⎠ (0.25 m)(0.12 m) EVALUATE: The tension in the rope is greater than the weight of the crate since the crate accelerates upward. If F were applied to the rim of the cylinder (l = 0.25 m), it would have the value F = 625 N. This is greater than T because it must accelerate the cylinder as well as the crate. And F is larger than this because it is applied closer to the axis than R so has a smaller moment arm and must be larger to give the same torque. G G IDENTIFY: Apply ∑ Fext = macm and ∑τ z = I cmα z to the roll. SET UP: At the point of contact, the wall exerts a friction force f directed downward and a normal force n directed to the right. This is a situation where the net force on the roll is zero, but the net torque is not zero. EXECUTE: (a) Balancing vertical forces, Frod cosθ = f + w + F , and balancing horizontal forces Frod sin θ = n. With f = μ k n, these equations become Frod cosθ = μ k n + F + w, Frod sin θ = n. Eliminating w+ F (16.0 kg)(9.80 m/s 2 ) + (60.0 N) = = 293 N. cosθ − μ k sin θ cos 30° − (0.25)sin 30° (b) With respect to the center of the roll, the rod and the normal force exert zero torque. The magnitude of the net torque is ( F − f ) R, and f = μ k n may be found by insertion of the value found for Frod into either n and solving for Frod gives Frod = of the above relations; i.e., f = μ k Frod sin θ = 36.57 N. Then, α= 10.70. τ I = (60.0 N − 36.57 N)(18.0 × 10−2 m) 2 (0.260 kg ⋅ m ) = 16.2 rad/s 2 . EVALUATE: If the applied force F is increased, Frod increases and this causes n and f to increase. The angle θ changes as the amount of paper unrolls and this affects α for a given F. G G IDENTIFY: Apply ∑τ z = Iα z to the flywheel and ∑ F = ma to the block. The target variables are the tension in the string and the acceleration of the block. (a) SET UP: Apply ∑τ z = Iα z to the rotation of the flywheel about the axis. The free-body diagram for the flywheel is given in Figure 10.70a. EXECUTE: The forces n and Mg act at the axis so have zero torque. ∑τ z = TR TR = Iα z Figure 10.70a © Copyright 2012 Pearson Education, Inc. All rights reserved. This material is protected under all copyright laws as they currently exist. No portion of this material may be reproduced, in any form or by any means, without permission in writing from the publisher. Dynamics of Rotational Motion 10-27 G G SET UP: Apply ∑ F = ma to the translational motion of the block. The free-body diagram for the block is given in Figure 10.70b. EXECUTE: ΣFy = ma y n − mg cos 36.9° = 0 n = mg cos 36.9° f k = μ k n = μ k mg cos 36.9° Figure 10.70b ∑ Fx = ma x mg sin36.9° − T − μk mg cos36.9° = ma mg (sin36.9° − μ k cos36.9°) − T = ma But we also know that ablock = Rα wheel , so α = a/R. Using this in the ∑τ z = Iα z equation gives TR = Ia/R and T = ( I/R 2 )a. Use this to replace T in the ∑ Fx = ma x equation: mg (sin36.9° − μk cos36.9°) − ( I/R 2 )a = ma a= a= mg (sin36.9° − μ k cos36.9°) m + I/R 2 (5.00 kg)(9.80 m/s 2 )(sin36.9° − (0.25)cos36.9°) (b) T = 5.00 kg + 0.500 kg ⋅ m 2 /(0.200 m) 2 0.500 kg ⋅ m 2 2 = 1.12 m/s 2 (1.12 m/s 2 ) = 14.0 N (0.200 m) EVALUATE: If the string is cut the block will slide down the incline with a = g sin36.9° − μ k g cos36.9° = 3.92 m/s 2 . The actual acceleration is less than this because mg sin36.9° must also accelerate the flywheel. mg sin36.9° − f k = 19.6 N. T is less than this; there must be more force 10.71. on the block directed down the incline than up the incline since the block accelerates down the incline. G G IDENTIFY: Apply ∑ F = ma to the block and ∑τ z = Iα z to the combined disks. SET UP: For a disk, I disk = 12 MR 2 , so I for the disk combination is I = 2.25 × 10−3 kg ⋅ m 2 . EXECUTE: For a tension T in the string, mg − T = ma and TR = I α = I Eliminating T and solving for a gives a = g m = a . R g , where m is the mass of the hanging m + I/R 1 + I/mR 2 block and R is the radius of the disk to which the string is attached. (a) With m = 1.50 kg and R = 2.50 × 10−2 m, a = 2.88 m/s 2 . 2 (b) With m = 1.50 kg and R = 5.00 × 10−2 m, a = 6.13 m/s 2 . The acceleration is larger in case (b); with the string attached to the larger disk, the tension in the string is capable of applying a larger torque. EVALUATE: ω = v/R, where v is the speed of the block and ω is the angular speed of the disks. When R is larger, in part (b), a smaller fraction of the kinetic energy resides with the disks. The block gains more speed as it falls a certain distance and therefore has a larger acceleration. © Copyright 2012 Pearson Education, Inc. All rights reserved. This material is protected under all copyright laws as they currently exist. No portion of this material may be reproduced, in any form or by any means, without permission in writing from the publisher. 10-28 10.72. Chapter 10 G G IDENTIFY: Apply both ∑ F = ma and ∑τ z = Iα z to the motion of the roller. Rolling without slipping means acm = Rα . Target variables are acm and f. SET UP: The free-body diagram for the roller is given in Figure 10.72. G G EXECUTE: Apply ∑ F = ma to the translational motion of the center of mass: ∑ Fx = ma x F − f = Macm Figure 10.72 Apply ∑τ z = Iα z to the rotation about the center of mass: ∑τ z = fR thin-walled hollow cylinder: I = MR 2 Then ∑τ z = Iα z implies fR = MR 2α . But α cm = Rα , so f = Macm . Using this in the ∑ Fx = ma x equation gives F − Macm = Macm . acm = F /2M, and then f = Macm = M ( F/2 M ) = F/2. 10.73. EVALUATE: If the surface were frictionless the object would slide without rolling and the acceleration would be acm = F/M . The acceleration is less when the object rolls. G G IDENTIFY: Apply ∑ F = ma to each object and apply ∑τ z = Iα z to the pulley. SET UP: Call the 75.0 N weight A and the 125 N weight B. Let TA and TB be the tensions in the cord to the left and to the right of the pulley. For the pulley, I = 12 MR 2 , where Mg = 80.0 N and R = 0.300 m. The 125 N weight accelerates downward with acceleration a, the 75.0 N weight accelerates upward with acceleration a and the pulley rotates clockwise with angular acceleration α , where a = Rα . G G G G EXECUTE: ∑ F = ma applied to the 75.0 N weight gives TA − wA = m Aa. ∑ F = ma applied to the 125.0 N weight gives wB − TB = mB a. ∑τ z = Iα z applied to the pulley gives (TB − TA ) R = ( 12 MR 2 )α z and TB − TA = 12 Ma. Combining these three equations gives wB − wA = (m A + mB + M/2)a and ⎛ ⎞ wB − wA 125 N − 75.0 N ⎛ ⎞ a=⎜ ⎟g =⎜ ⎟ g = 0.2083 g . ⎜ wA + wB + wpulley /2 ⎟ 75 0 N 125 N 40 0 N . + + . ⎝ ⎠ ⎝ ⎠ G G TA = wA (1 + a/g ) = 1.2083wA = 90.62 N. TB = wB (1 − a/g ) = 0.792 wB = 98.96 N. ∑ F = ma applied to the pulley gives that the force F applied by the hook to the pulley is F = TA + TB + wpulley = 270 N. The force 10.74. the ceiling applies to the hook is 270 N. EVALUATE: The force the hook exerts on the pulley is less than the total weight of the system, since the net effect of the motion of the system is a downward acceleration of mass. G G IDENTIFY: This problem can be done either with conservation of energy or with ∑ Fext = ma. We will do it both ways. (a) SET UP: (1) Conservation of energy: K1 + U1 + Wother = K 2 + U 2 . © Copyright 2012 Pearson Education, Inc. All rights reserved. This material is protected under all copyright laws as they currently exist. No portion of this material may be reproduced, in any form or by any means, without permission in writing from the publisher. Dynamics of Rotational Motion 10-29 Take position 1 to be the location of the disk at the base of the ramp and 2 to be where the disk momentarily stops before rolling back down, as shown in Figure 10.74a. Figure 10.74a Take the origin of coordinates at the center of the disk at position 1 and take + y to be upward. Then y1 = 0 and y2 = d sin 30°, where d is the distance that the disk rolls up the ramp. “Rolls without slipping” and neglect rolling friction says W f = 0; only gravity does work on the disk, so Wother = 0. EXECUTE: U1 = Mgy1 = 0. K1 = 12 Mv12 + 12 I cmω12 (Eq. 10.8). But ω1 = v1/R and I cm = 12 MR 2 , so 1 I ω2 2 cm 1 = 12 ( 12 MR 2 )(v1/R) 2 = 14 Mv12 . Thus K1 = 12 Mv12 + 14 Mv12 = 43 Mv12 . U 2 = Mgy2 = Mgd sin 30°. K 2 = 0 (disk is at rest at point 2). Thus 3 Mv12 4 = Mgd sin 30°, which gives 3v12 3(3.60 m/s) 2 = = 1.98 m. 4 g sin 30° 4(9.80 m/s 2 )sin 30° SET UP: (2) Force and acceleration: The free-body diagram is given in Figure 10.74b. d= EXECUTE: Apply ∑ Fx = ma x to the translational motion of the center of mass: Mg sin θ − f = Macm Apply ∑τ z = Iα z to the rotation about the center of mass: fR = ( 12 MR 2 )α z f = 12 MRα z Figure 10.74b But acm = Rα in this equation gives f = 12 Macm . Use this in the ∑ Fx = ma x equation to eliminate f. Mg sin θ − 12 Macm = Macm . M divides out and 3 a 2 cm 2 = g sin θ . acm = 23 g sin θ = 23 (9.80 m/s 2 )sin 30° = 3.267 m/s . SET UP: Apply the constant acceleration equations to the motion of the center of mass. Note that in our coordinates the positive x-direction is down the incline. v0 x = −3.60 m/s (directed up the incline); a x = +3.267 m/s 2 ; vx = 0 (momentarily comes to rest); and x − x0 = ?. We use the kinematics equation vx2 = v02x + 2a x ( x − x0 ) to solve for x − x0 . v02x (−3.60 m/s) 2 =− = − 1.98 m. 2a x 2(3.267 m/s 2 ) (b) EVALUATE: The results from the two methods agree; the disk rolls 1.98 m up the ramp before it stops. The mass M enters both in the linear inertia and in the gravity force so divides out. The mass M and radius R enter in both the rotational inertia and the gravitational torque so divide out. G G IDENTIFY: Apply ∑ Fext = macm to the motion of the center of mass and apply ∑ τ z = I cmα z to the EXECUTE: x − x0 = − 10.75. rotation about the center of mass. SET UP: I = 2 ( 1 mR 2 2 ) = mR . The moment arm for T is b. 2 © Copyright 2012 Pearson Education, Inc. All rights reserved. This material is protected under all copyright laws as they currently exist. No portion of this material may be reproduced, in any form or by any means, without permission in writing from the publisher. 10-30 Chapter 10 EXECUTE: The tension is related to the acceleration of the yo-yo by (2m) g − T = (2m)a , and to the a angular acceleration by Tb = I α = I . Dividing the second equation by b and adding to the first to b 2m 2 2 eliminate T yields a = g , α=g . The tension is found by =g (2m + I /b 2 ) 2 + ( R /b ) 2 2b + R 2 /b substitution into either of the two equations: ⎛ ⎞ 2 ( R /b ) 2 2mg T = (2m)( g − a ) = (2mg ) ⎜⎜1 − mg 2 . = = ⎟ 2⎟ 2 2 + ( R /b ) ⎠ 2 + ( R /b ) (2(b /R ) 2 + 1) ⎝ EVALUATE: a → 0 when b → 0. As b → R, a → 2 g /3. 10.76. IDENTIFY: Apply conservation of energy to the motion of the shell, to find its linear speed v at points A G G and B. Apply ∑ F = ma to the circular motion of the shell in the circular part of the track to find the normal force exerted by the track at each point. Since r << R the shell can be treated as a point mass G G moving in a circle of radius R when applying ∑ F = ma. But as the shell rolls along the track, it has both translational and rotational kinetic energy. SET UP: K1 + U1 = K 2 + U 2 . Let 1 be at the starting point and take y = 0 to be at the bottom of the track, so y1 = h0 . K = 12 mv 2 + 12 I ω 2 . I = 23 mr 2 and ω = v /r , so K = 56 mv 2 . During the circular motion, arad = v 2 /R. G v2 G EXECUTE: (a) ∑ F = ma at point A gives n + mg = m . The minimum speed for the shell not to fall off R the track is when n → 0 and v 2 = gR. Let point 2 be A, so y2 = 2 R and v22 = gR. Then ( K1 + U1 = K 2 + U 2 gives mgh0 = 2mgR + 56 m( gR). h0 = 2 + 5 6 ) R = 176 R. (b) Let point 2 be B, so y2 = R. Then K1 + U1 = K 2 + U 2 gives mgh0 = mgR + 65 mv22 . With h = 17 R this 6 G v2 G gives v 2 = 11 gR. Then ∑ F = ma at B gives n = m = 11 mg . 5 R 5 (c) Now K = 12 mv 2 instead of 5 mv 2 . 6 The shell would be moving faster at A than with friction and would still make the complete loop. G G (d) In part (c): mgh0 = mg (2 R) + 12 mv 2 . h0 = 17 R gives v 2 = 53 gR. ∑ F = ma at point A gives 6 ⎛ v2 ⎞ v2 and n = m ⎜ − g ⎟ = 23 mg . In part (a), n = 0, since at this point gravity alone supplies the ⎜ ⎟ R ⎝R ⎠ net downward force that is required for the circular motion. EVALUATE: The normal force at A is greater when friction is absent because the speed of the shell at A is greater when friction is absent than when there is rolling without slipping. IDENTIFY: Apply ∑ τ z = I α z to the cylinder or hoop. Find a for the free end of the cable and apply constant acceleration equations. SET UP: atan for a point on the rim equals a for the free end of the cable, and atan = Rα . mg + n = m 10.77. EXECUTE: (a) ∑ τ z = I α z and atan = Rα gives FR = atan = 1 1 ⎛a MR 2α = MR 2 ⎜ tan 2 2 ⎝ R ⎞ ⎟. ⎠ 2F 200 N = = 50 m/s 2 . Distance the cable moves: x − x0 = v0 xt + 12 a xt 2 M 4.00 kg 1 gives 50 m = (50 m/s 2 )t 2 and t = 1.41 s. vx = v0 x + a xt = 0 + (50 m/s 2 )(1.41 s) = 70.5 m/s. 2 © Copyright 2012 Pearson Education, Inc. All rights reserved. This material is protected under all copyright laws as they currently exist. No portion of this material may be reproduced, in any form or by any means, without permission in writing from the publisher. Dynamics of Rotational Motion 10-31 (b) For a hoop, I = MR 2 , which is twice as large as before, so α and atan would be half as large. Therefore the time would be longer by a factor of 2. For the speed, vx2 = v02x + 2a x x, in which x is the same, so vx would be half as large since a x is smaller. 10.78. EVALUATE: The acceleration a that is produced depends on the mass of the object but is independent of its radius. But a depends on how the mass is distributed and is different for a hoop versus a cylinder. G G IDENTIFY: Apply ∑ Fext = macm to the motion of the center of mass and ∑τ z = I cmα z to the rotation about the center of mass. SET UP: For a hoop, I = MR 2 . For a solid disk, I = 12 MR 2 . EXECUTE: (a) Because there is no vertical motion, the tension is just the weight of the hoop: T = Mg = (0.180 kg)(9.8 N/kg) = 1.76 N. (b) Use τ = Iα to find α . The torque is RT , so α = RT /I = RT /MR 2 = T /MR = Mg /MR, so α = g /R = (9.8 m/s 2 )/(0.08 m) = 122.5 rad/s 2 . (c) a = Rα = 9.8 m/s 2 (d) T would be unchanged because the mass M is the same; α and a would be twice as great because I is now 1 MR 2 . 2 EVALUATE: atan for a point on the rim of the hoop or disk equals a for the free end of the string. Since I 10.79. is smaller for the disk, the same value of T produces a greater angular acceleration. IDENTIFY: As it rolls down the rough slope, the basketball gains rotational kinetic energy as well as translational kinetic energy. But as it moves up the smooth slope, its rotational kinetic energy does not change since there is no friction. SET UP: I cm = 23 mR 2 . When it rolls without slipping, vcm = Rω. When there is no friction the angular speed of rotation is constant. Take + y upward and let y = 0 in the valley. EXECUTE: (a) Find the speed vcm in the level valley: K1 + U1 = K 2 + U 2 . y1 = H 0 , y2 = 0. K1 = 0, U 2 = 0. Therefore, U1 = K 2 . mgH 0 = 12 mv 2cm + 12 I cmω 2 . mgH 0 = 56 mv 2cm and v 2cm = 1 I ω2 2 cm = ( 1 2 mR 2 2 3 ) 2 ⎛ vcm ⎞ 2 1 ⎜⎝ ⎟ = 3 mv cm , so R ⎠ 6 gH 0 . Find the height H it goes up the other side. Its rotational kinetic energy 5 stays constant as it rolls on the frictionless surface. 1 mv 2cm 2 + 12 I cmω 2 = 12 I cmω 2 + mgH . v 2cm = 53 H 0 . 2g (b) Some of the initial potential energy has been converted into rotational kinetic energy so there is less potential energy at the second height H than at the first height H 0 . H= 10.80. EVALUATE: Mechanical energy is conserved throughout this motion. But the initial gravitational potential energy on the rough slope is not all transformed into potential energy on the smooth slope because some of that energy remains as rotational kinetic energy at the highest point on the smooth slope. IDENTIFY: Use projectile motion to find the speed v the marble needs at the edge of the pit to make it to the level ground on the other side. Apply conservation of energy to the motion down the hill in order to relate the initial height to the speed v at the edge of the pit. Wother = 0 so conservation of energy gives K1 + U1 = K 2 + U 2 . SET UP: In the projectile motion the marble must travel 36 m horizontally while falling vertically 20 m. Let + y be downward. For the motion down the hill, let y2 = 0 so U 2 = 0 and y1 = h. K1 = 0. Rolling without slipping means v = Rω. K = 12 I cmω 2 + 12 mv 2 = ( 1 2 mR 2 2 5 )ω 2 7 + 12 mv 2 = 10 mv 2 . © Copyright 2012 Pearson Education, Inc. All rights reserved. This material is protected under all copyright laws as they currently exist. No portion of this material may be reproduced, in any form or by any means, without permission in writing from the publisher. 10-32 Chapter 10 EXECUTE: (a) Projectile motion: v0 y = 0. a y = 9.80 m/s 2 . y − y0 = 20 m. y − y0 = v0 yt + 12 a yt 2 gives t= 2( y − y0 ) x − x0 36 m = 2.02 s. Then x − x0 = v0 xt gives v = v0 x = = = 17.8 m/s. t 2.02 s ay 7 Motion down the hill: U1 = K 2 . mgh = 10 mv 2 . h = (b) 1 Iω 2 2 7v 2 7(17.8 m/s) 2 = = 22.6 m. 10 g 10(9.80 m/s 2 ) = 15 mv 2 , independent of R. I is proportional to R 2 but ω 2 is proportional to 1/R 2 for a given translational speed v. (c) The object still needs v = 17.8 m/s at the bottom of the hill in order to clear the pit. But now v2 = 16.2 m. 2g EVALUATE: The answer to part (a) also does not depend on the mass of the marble. But, it does depend on how the mass is distributed within the object. The answer would be different if the object were a hollow spherical shell. In part (c) less height is needed to give the object the same translational speed because in (c) none of the energy goes into rotational motion. IDENTIFY: Apply conservation of energy to the motion of the boulder. SET UP: K = 12 mv 2 + 12 I ω 2 and v = Rω when there is rolling without slipping. I = 25 mR 2 . K 2 = 12 mv 2 and h = 10.81. EXECUTE: Break into two parts, the rough and smooth sections. 2 1 1⎛ 2 10 ⎞⎛ v ⎞ Rough: mgh1 = 12 mv 2 + 12 I ω 2 . mgh1 = mv 2 + ⎜ mR 2 ⎟⎜ ⎟ . v 2 = gh1. 2 2⎝ 5 7 ⎠⎝ R ⎠ Smooth: Rotational kinetic energy does not change. mgh2 + 1 2 1 2 mv + K rot = mvBottom + K rot . 2 2 1 ⎛ 10 ⎞ 1 2 10 10 . vBottom = (9.80 m/s2 )(25 m) + 2(9.80 m/s2 )(25 m) = 29.0 m/s. gh2 + ⎜ gh1⎟ = vBottom gh1 + 2gh2 = ⎝ ⎠ 2 7 2 7 7 EVALUATE: If all the hill was rough enough to cause rolling without slipping, 10 vBottom = g (50 m) = 26.5 m/s. A smaller fraction of the initial gravitational potential energy goes into 7 translational kinetic energy of the center of mass than if part of the hill is smooth. If the entire hill is smooth and the boulder slides without slipping, vBottom = 2 g (50 m) = 31.3 m/s. In this case all the initial 10.82. gravitational potential energy goes into the kinetic energy of the translational motion. IDENTIFY: Apply conservation of energy to the motion of the ball as it rolls up the hill. After the ball leaves the edge of the cliff it moves in projectile motion and constant acceleration equations can be used. (a) SET UP: Use conservation of energy to find the speed v2 of the ball just before it leaves the top of the cliff. Let point 1 be at the bottom of the hill and point 2 be at the top of the hill. Take y = 0 at the bottom of the hill, so y1 = 0 and y2 = 28.0 m. EXECUTE: K1 + U1 = K 2 + U 2 1 mv 2 1 2 + 12 I ω12 = mgy2 + 12 mv22 + 12 I ω22 Rolling without slipping means ω = v /r and 7 mv12 10 1 Iω 2 2 = ( 1 2 mr 2 2 5 ) (v/r ) 2 = 15 mv 2 . 7 = mgy2 + 10 mv22 v2 = v12 − 10 gy2 = 15.26 m/s 7 SET UP: Consider the projectile motion of the ball, from just after it leaves the top of the cliff until just before it lands. Take + y to be downward. Use the vertical motion to find the time in the air: v0 y = 0, a y = 9.80 m/s 2 , y − y0 = 28.0 m, t = ? © Copyright 2012 Pearson Education, Inc. All rights reserved. This material is protected under all copyright laws as they currently exist. No portion of this material may be reproduced, in any form or by any means, without permission in writing from the publisher. Dynamics of Rotational Motion EXECUTE: 10-33 y − y0 = v0 yt + 12 a yt 2 gives t = 2.39 s During this time the ball travels horizontally x − x0 = v0 xt = (15.26 m/s)(2.39 s) = 36.5 m. Just before it lands, v y = v0 y + a yt = 23.4 m/s and vx = v0 x = 15.3 m/s v = vx2 + v 2y = 28.0 m/s 10.83. (b) EVALUATE: At the bottom of the hill, ω = v /r = (25.0 m/s)/r. The rotation rate doesn’t change while the ball is in the air, after it leaves the top of the cliff, so just before it lands ω = (15.3 m/s)/r. The total kinetic energy is the same at the bottom of the hill and just before it lands, but just before it lands less of this energy is rotational kinetic energy, so the translational kinetic energy is greater. IDENTIFY: Apply conservation of energy to the motion of the wheel. K = 12 mv 2 + 12 I ω 2 . SET UP: No slipping means that ω = v /R. Uniform density means mr = λ 2π R and ms = λ R, where mr is the mass of the rim and ms is the mass of each spoke. For the wheel, I = I rim + I spokes . For each spoke, I = 13 ms R 2 . 1 1 ⎛1 ⎞ EXECUTE: (a) mgh = mv 2 + I ω 2 . I = I rim + I spokes = mr R 2 + 6 ⎜ ms R 2 ⎟ 2 2 ⎝3 ⎠ Also, m = mr + ms = 2π Rλ + 6 Rλ = 2 Rλ (π + 3). Substituting into the conservation of energy equation 1 1⎡ ⎛1 ⎞⎤ gives 2 Rλ (π + 3) gh = (2 Rλ )(π + 3)( Rω ) 2 + ⎢ 2π Rλ R 2 + 6 ⎜ λ RR 2 ⎟ ⎥ ω 2 . 2 2⎣ ⎝3 ⎠⎦ ω= 10.84. (π + 3) gh 2 R (π + 2) = (π + 3)(9.80 m/s 2 )(58.0 m) (0.210 m) 2 (π + 2) = 124 rad/s and v = Rω = 26.0 m/s (b) Doubling the density would have no effect because it does not appear in the answer. ω is inversely proportional to R so doubling the diameter would double the radius which would reduce ω by half, but v = Rω would be unchanged. EVALUATE: Changing the masses of the rim and spokes by different amounts would alter the speed v at the bottom of the hill. IDENTIFY: Apply the work-energy theorem to the motion of the basketball. K = 12 mv 2 + 12 I ω 2 and v = Rω. SET UP: For a thin-walled, hollow sphere I = 23 mR 2 . 10.85. EXECUTE: For rolling without slipping, the kinetic energy is (1/2)( m + I /R 2 )v 2 = (5/6)mv 2 ; initially, this is 32.0 J and at the return to the bottom it is 8.0 J. Friction has done −24.0 J of work, −12.0 J each going up and down. The potential energy at the highest point was 20.0 J, so the height above 20.0 J the ground was = 3.40 m. (0.600 kg)(9.80 m/s 2 ) EVALUATE: All of the kinetic energy of the basketball, translational and rotational, has been removed at the point where the basketball is at its maximum height up the ramp. IDENTIFY: Apply conservation of energy to the motion of the ball. Once the ball leaves the track the ball moves in projectile motion. SET UP: The ball has I = 52 mR 2 ; the silver dollar has I = 12 mR 2 . For the projectile motion take + y downward, so ax = 0 and a y = + g. EXECUTE: (a) The kinetic energy of the ball when it leaves the track (when it is still rolling without slipping) is (7/10) mv 2 and this must be the work done by gravity, W = mgh, so v = 10 gh /7. The ball is in the air for a time t = 2 y /g , so x = vt = 20hy /7. (b) The answer does not depend on g, so the result should be the same on the moon. © Copyright 2012 Pearson Education, Inc. All rights reserved. This material is protected under all copyright laws as they currently exist. No portion of this material may be reproduced, in any form or by any means, without permission in writing from the publisher. 10-34 Chapter 10 (c) The presence of rolling friction would decrease the distance. (d) For the dollar coin, modeled as a uniform disc, K = (3/4)mv 2 , and so x = 8hy /3. 10.86. EVALUATE: The sphere travels a little farther horizontally, because its moment of inertia is a smaller fraction of MR 2 than for the disk. The result is independent of the mass and radius of the object but it does depend on how that mass is distributed within the object. IDENTIFY: Apply ∑τ z = Iα z to the drawbridge and calculate α z . For part (c) use conservation of energy. SET UP: The free-body diagram for the drawbridge is given in Figure 10.86. For an axis at the lower end, I = 13 ml 2 . EXECUTE: (a) ∑τ z = Iα z gives mg (4.00 m)(cos60.0°) = 13 ml 2α z and αz = 3g (4.00 m)(cos60.0°) (8.00 m) 2 = 0.919 rad/s 2 . (b) α z depends on the angle the bridge makes with the horizontal. α z is not constant during the motion and ω z = ω0 z + α z t cannot be used. (c) Use conservation of energy. Take y = 0 at the lower end of the drawbridge, so y1 = (4.00 m)(sin60.0°) and y2 = 0. K 2 + U 2 = K1 + U1 + Wother gives U1 = K 2 , mgy1 = 12 I ω 2 . mgy1 = ( 1 1 ml 2 2 3 )ω 2 and 6 gy1 6(9.80 m/s 2 )(4.00 m)(sin60.0°) = = 1.78 rad/s. l 8.00 m EVALUATE: If we incorrectly assume that α z is constant and has the value calculated in part (a), then ω= ω z2 = ω02z + 2α z (θ − θ0 ) gives ω = 1.39 rad/s. The angular acceleration increases as the bridge rotates and the actual angular velocity is larger than this. Figure 10.86 10.87. IDENTIFY: Use conservation of energy to relate the speed of the block to the distance it has descended. Then use a constant acceleration equation to relate these quantities to the acceleration. SET UP: For the cylinder, I = 12 M (2 R)2 , and for the pulley, I = 12 MR 2 . EXECUTE: Doing this problem using kinematics involves four unknowns (six, counting the two angular accelerations), while using energy considerations simplifies the calculations greatly. If the block and the cylinder both have speed v, the pulley has angular velocity v /R and the cylinder has angular velocity v /2 R, the total kinetic energy is ⎤ 3 1⎡ M (2 R )2 MR 2 K = ⎢ Mv 2 + (v /2 R) 2 + (v /R) 2 + Mv 2 ⎥ = Mv 2 . 2 ⎣⎢ 2 2 ⎦⎥ 2 © Copyright 2012 Pearson Education, Inc. All rights reserved. This material is protected under all copyright laws as they currently exist. No portion of this material may be reproduced, in any form or by any means, without permission in writing from the publisher. Dynamics of Rotational Motion 10-35 This kinetic energy must be the work done by gravity; if the hanging mass descends a distance y, K = Mgy, or v 2 = (2/3) gy. For constant acceleration, v 2 = 2ay, and comparison of the two expressions gives a = g /3. EVALUATE: If the pulley were massless and the cylinder slid without rolling, Mg = 2Ma and a = g /2. 10.88. 10.89. The rotation of the objects reduces the acceleration of the block. IDENTIFY: The rings and the rod exert forces on each other, but there is no net force or torque on the system, and so the angular momentum will be constant. 1 ML2 . For each ring, I = mr 2, where r is their distance from the axis. SET UP: For the rod, I = 12 EXECUTE: (a) As the rings slide toward the ends, the moment of inertia changes, and the final angular ⎡ 1 ML2 + 2mr12 ⎤ I 5.00 × 10−4 kg ⋅ m 2 ω1 ⎥ ω velocity is given by ω2 = ω1 1 = ω1 ⎢ 12 2 = = , so ω2 = 7.5 rev/min. 1 2 −3 1 ML + 2mr 2 I2 4 2 00 10 kg m . × ⋅ ⎢⎣ 12 2 ⎥ ⎦ (b) The forces and torques that the rings and the rod exert on each other will vanish, but the common angular velocity will be the same, 7.5 rev/min. EVALUATE: Note that conversion from rev/min to rad/s was not necessary. The angular velocity of the rod decreases as the rings move away from the rotation axis. IDENTIFY: Apply conservation of energy to the motion of the first ball before the collision and to the motion of the second ball after the collision. Apply conservation of angular momentum to the collision between the first ball and the bar. SET UP: The speed of the ball just before it hits the bar is v = 2 gy = 15.34 m/s. Use conservation of angular momentum to find the angular velocity ω of the bar just after the collision. Take the axis at the center of the bar. EXECUTE: L1 = mvr = (5.00 kg)(15.34 m/s)(2.00 m) = 153.4 kg ⋅ m 2 Immediately after the collision the bar and both balls are rotating together. L2 = I totω 1 Ml 2 + 2mr 2 = 1 (8.00 kg)(4.00 m) 2 + 2(5.00 kg)(2.00 m) 2 = 50.67 kg ⋅ m 2 I tot = 12 12 L2 = L1 = 153.4 kg ⋅ m 2 ω = L2 /I tot = 3.027 rad/s Just after the collision the second ball has linear speed v = rω = (2.00 m)(3.027 rad/s) = 6.055 m/s and is moving upward. 10.90. 1 mv 2 2 = mgy gives y = 1.87 m for the height the second ball goes. EVALUATE: Mechanical energy is lost in the inelastic collision and some of the final energy is in the rotation of the bar with the first ball stuck to it. As a result, the second ball does not reach the height from which the first ball was dropped. IDENTIFY: As Jane grabs the helpless Tarzan from the jaws of the hippo, the angular momentum of the Jane-Vine-Tarzan system is conserved about the point at which the vine swings. Before and after that, mechanical energy is conserved. SET UP: Take + y upward and y = 0 at the ground. The center of mass of the vine is 4.00 m from either end. Treat the motion in three parts: (i) Jane swinging to where the vine is vertical. Apply conservation of energy. (ii) The inelastic collision between Jane and Tarzan. Apply conservation of angular momentum. (iii) The motion of the combined object after the collision. Apply conservation of energy. The vine has I = 13 mvinel 2 and Jane has I = mJanel 2 , so the system of Jane plus vine has I tot = 13 mvine + mJane l 2 . ( ) Angular momentum is L = I ω. © Copyright 2012 Pearson Education, Inc. All rights reserved. This material is protected under all copyright laws as they currently exist. No portion of this material may be reproduced, in any form or by any means, without permission in writing from the publisher. 10-36 Chapter 10 Figure 10.90a EXECUTE: (a) The initial and final positions of Jane and the vine for the first stage of the motion are sketched in Figure 10.90a. The initial height of the center of the vine is hvine, 1 = 6.50 m and its final height is hvine, 2 = 4.00 m. Conservation of energy gives U1 + K1 = U 2 + K 2 . K1 = 0 so mJane g (5.00 m) + mvine g (6.50 m) = mvine g (4.00 m) + 12 I totω 2 . ω = which gives ω = 2[ mJane (5.00 m) + mvine (2.50 m)]g ( 13 mvine + mJane ) l 2 , 2[(60.0 kg)(5.00 m) + (30.0 kg)(2.50 m)](9.80 m/s 2 ) = 1.28 rad/s. ⎡ 1 (30.0 kg) + 60.0 kg ⎤ (8.00 m) 2 ⎣3 ⎦ (b) Conservation of angular momentum applied to the collision gives L1 = L2 , so I1ω1 = I 2ω 2 . ω1 = 1.28 rad/s. I1 = ⎡⎣ 13 (30.0 kg) + 60.0 kg ⎤⎦ (8.00 m)2 = 4.48 × 103 kg ⋅ m 2 . I 2 = I1 + mTarzanl 2 = 4.48 × 103 kg ⋅ m 2 + (72.0 kg)(8.00 m) 2 = 9.09 × 103 kg ⋅ m 2 . ⎛ 4.48 × 103 kg ⋅ m 2 ⎞ ⎛ I1 ⎞ (1.28 rad/s) = 0.631 rad/s. ⎟ ω1 = ⎜⎜ 3 2⎟ ⎟ ⎝ I2 ⎠ ⎝ 9.09 × 10 kg ⋅ m ⎠ ω2 = ⎜ Figure 10.90b (c) The final position of Tarzan and Jane, when they have swung to their maximum height, is shown in Figure 10.90b. If Tarzan and Jane rise to a height h, then the center of the vine rises to a height h /2. Conservation of energy gives 1 Iω 2 2 = (mJane + mTarzan ) gh + mvine gh /2, where I = 9.09 × 103 kg ⋅ m 2 and ω = 0.631 rad/s, from part (b). © Copyright 2012 Pearson Education, Inc. All rights reserved. This material is protected under all copyright laws as they currently exist. No portion of this material may be reproduced, in any form or by any means, without permission in writing from the publisher. Dynamics of Rotational Motion h= 10.91. Iω 2 (9.09 × 103 kg ⋅ m 2 )(0.631 rad/s) 2 = 1.26 m. 2(60.0 kg + 72.0 kg +15.0 kg)(9.80 m/s 2 ) EVALUATE: Mechanical energy is lost in the inelastic collision. IDENTIFY: Apply conservation of angular momentum to the collision. Linear momentum is not conserved because of the force applied to the rod at the axis. But since this external force acts at the axis, it produces no torque and angular momentum is conserved. SET UP: The system before and after the collision is sketched in Figure 10.91. EXECUTE: (a) mb = 14 mrod 2(mJane + mTarzan + 0.5mvine ) g = 10-37 EXECUTE: L1 = mbvr = 14 mrod v( L /2) L1 = 18 mrod vL L2 = ( I rod + I b )ω I rod = 13 mrod L2 I b = mb r 2 = 14 mrod ( L /2) 2 1 m L2 I b = 16 rod Figure 10.91 Thus L1 = L2 gives 1v 8 1 m vL 8 rod = ( 13 mrod L2 + 161 mrod L2 )ω = 19 Lω 48 6 ω = 19 v /L (b) K1 = 12 mv 2 = 18 mrod v 2 K 2 = 12 I ω 2 = 12 ( I rod + I b )ω 2 = K 2 = 12 Then ( 1948 )( 196 ) K2 = K1 2 ( 1 1 m L2 2 3 rod ) 1 m L2 (6v /19 L) 2 + 16 rod 3 mrod v 2 = 152 mrod v 2 3 m v2 152 rod 1 m v2 8 rod = 3/19. EVALUATE: The collision is inelastic and K 2 < K1. 10.92. IDENTIFY: Apply Eq. (10.29). SET UP: The door has I = 13 ml 2 . The torque applied by the force is rFav , where r = l /2. EXECUTE: ∑τ av = rFav, and ΔL = rFav Δt = rJ . The angular velocity ω is then ω= ΔL rFav Δt (l /2) Fav Δt 3 Fav Δt , where l is the width of the door. Substitution of the given = = = 1 ml 2 2 ml I I 3 10.93. numeral values gives ω = 0.514 rad/s. EVALUATE: The final angular velocity of the door is proportional to both the magnitude of the average force and also to the time it acts. (a) IDENTIFY: Apply conservation of angular momentum to the collision between the bullet and the board: SET UP: The system before and after the collision is sketched in Figure 10.93a. © Copyright 2012 Pearson Education, Inc. All rights reserved. This material is protected under all copyright laws as they currently exist. No portion of this material may be reproduced, in any form or by any means, without permission in writing from the publisher. 10-38 Chapter 10 Figure 10.93a EXECUTE: L1 = L2 L1 = mvr sinφ = mvl = (1.90 × 10 −3 kg)(360 m/s)(0.125 m) = 0.0855 kg ⋅ m 2 /s L2 = I 2ω2 I 2 = I board + I bullet = 13 ML2 + mr 2 I 2 = 13 (0.750 kg)(0.250 m)2 + (1.90 × 10−3 kg)(0.125 m)2 = 0.01565 kg ⋅ m 2 L1 0.0855 kg ⋅ m 2 /s = = 5.46 rad/s I2 0.1565 kg ⋅ m 2 (b) IDENTIFY: Apply conservation of energy to the motion of the board after the collision. SET UP: The position of the board at points 1 and 2 in its motion is shown in Figure 10.93b. Take the origin of coordinates at the center of the board and + y to be upward, so ycm,1 = 0 and ycm,2 = h, the Then L1 = L2 gives that ω2 = height being asked for. K1 + U1 + Wother = K 2 + U 2 EXECUTE: Only gravity does work, so Wother = 0. K1 = 12 I ω 2 U1 = mgycm,1 = 0 K2 = 0 U 2 = mgycm,2 = mgh Figure 10.93b Thus 1 2 I ω 2 = mgh. Iω 2 (0.01565 kg ⋅ m 2 )(5.46 rad/s) 2 = = 0.0317 m = 3.17 cm 2mg 2(0.750 kg + 1.90 × 10 −3 kg)(9.80 m/s 2 ) (c) IDENTIFY and SET UP: The position of the board at points 1 and 2 in its motion is shown in Figure 10.93c. h= © Copyright 2012 Pearson Education, Inc. All rights reserved. This material is protected under all copyright laws as they currently exist. No portion of this material may be reproduced, in any form or by any means, without permission in writing from the publisher. Dynamics of Rotational Motion 10-39 Apply conservation of energy as in part (b), except now we want ycm,2 = h = 0.250 m. Solve for the ω after the collision that is required for this to happen. Figure 10.93c EXECUTE: ω= 1 2 I ω 2 = mgh 2mgh 2(0.750 kg + 1.90 × 10−3 kg)(9.80 m/s2 )(0.250 m) = I 0.01565 kg ⋅ m 2 ω = 15.34 rad/s Now go back to the equation that results from applying conservation of angular momentum to the collision and solve for the initial speed of the bullet. L1 = L2 implies mbullet vl = I 2ω2 I 2ω2 (0.01565 kg ⋅ m 2 )(15.34 rad/s) = = 1010 m/s mbulletl (1.90 × 10−3 kg)(0.125 m) EVALUATE: We have divided the motion into two separate events: the collision and the motion after the collision. Angular momentum is conserved in the collision because the collision happens quickly. The board doesn’t move much until after the collision is over, so there is no gravity torque about the axis. The collision is inelastic and mechanical energy is lost in the collision. Angular momentum of the system is not conserved during this motion, due to the external gravity torque. Our answer to parts (b) and (c) say that a bullet speed of 360 m/s causes the board to swing up only a little and a speed of 1010 m/s causes it to swing all the way over. IDENTIFY: Angular momentum is conserved, so I 0ω0 = I 2ω2 . v= 10.94. SET UP: For constant mass the moment of inertia is proportional to the square of the radius. EXECUTE: R02ω0 = R22ω 2 , or R02ω0 = ( R0 + ΔR ) 2 (ω0 + Δω )= R02ω0 + 2 R0 ΔRω0 + R02 Δω , where the terms in ΔRΔω and (Δω ) 2 have been omitted. Canceling the R02ω0 term gives ΔR = − R0 Δω = −1.1 cm. 2 ω0 EVALUATE: ΔR / R0 and Δω /ω0 are each very small so the neglect of terms containing ΔRΔω or (Δω ) 2 10.95. is an accurate simplifying approximation. IDENTIFY: Apply conservation of angular momentum to the collision between the bird and the bar and apply conservation of energy to the motion of the bar after the collision. SET UP: For conservation of angular momentum take the axis at the hinge. For this axis the initial angular momentum of the bird is mbird (0.500 m)v , where mbird = 0.500 kg and v = 2.25 m/s . For this axis the moment of inertia is I = 13 mbar L2 = 13 (1.50 kg)(0.750 m) 2 = 0.281 kg ⋅ m 2 . For conservation of energy, the gravitational potential energy of the bar is U = mbar gycm , where ycm is the height of the center of the bar. Take ycm,1 = 0, so ycm,2 = −0.375 m. EXECUTE: (a) L1 = L2 gives mbird (0.500 m)v = ( 13 mbar L2 )ω . ω= 3mbird (0.500 m)v 3(0.500 kg)(0.500 m)(2.25 m/s) = = 2.00 rad/s. mbar L2 (1.50 kg)(0.750 m) 2 © Copyright 2012 Pearson Education, Inc. All rights reserved. This material is protected under all copyright laws as they currently exist. No portion of this material may be reproduced, in any form or by any means, without permission in writing from the publisher. 10-40 Chapter 10 (b) U1 + K1 = U 2 + K 2 applied to the motion of the bar after the collision gives 1 2 2 I ω12 = mbar g ( −0.375 m) + 12 I ω22 . ω2 = ω12 + mbar g (0.375 m). I ω2 = (2.00 rad/s) 2 + 10.96. 10.97. 2 (1.50 kg)(9.80 m/s 2 )(0.375 m) = 6.58 rad/s 0.281 kg ⋅ m 2 EVALUATE: Mechanical energy is not conserved in the collision. The kinetic energy of the bar just after the collision is less than the kinetic energy of the bird just before the collision. IDENTIFY: Angular momentum is conserved, since the tension in the string is in the radial direction and G G therefore produces no torque. Apply ∑ F = ma to the block, with a = arad = v 2 /r. SET UP: The block’s angular momentum with respect to the hole is L = mvr. v2 EXECUTE: The tension is related to the block’s mass and speed, and the radius of the circle, by T = m . r m 2v 2 r 2 ( mvr ) 2 L2 21 T = mv = = = 3 . The radius at which the string breaks is r m r3 mr 3 mr 2 2 L (mv1r1 ) ((0.250 kg)(4.00 m/s)(0.800 m)) 2 r3 = = = , from which r = 0.440 m. mTmax mTmax (0.250 kg)(30.0 N) ⎛ 0.800 m ⎞ EVALUATE: Just before the string breaks the speed of the rock is (4.00 m/s) ⎜ ⎟ = 7.27 m/s . We ⎝ 0.440 m ⎠ can verify that v = 7.27 m/s and r = 0.440 m do give T = 30.0 N. IDENTIFY and SET UP: Apply conservation of angular momentum to the system consisting of the disk and train. SET UP: L1 = L2 , counterclockwise positive. The motion is sketched in Figure 10.97. L1 = 0 (before you switch on the train’s engine; both the train and the platform are at rest) L2 = Ltrain + Ldisk Figure 10.97 EXECUTE: The train is 1 2 (0.95 m) = 0.475 m from the axis of rotation, so for it I t = mt R = (1.20 kg)(0.475 m)2 = 0.2708 kg ⋅ m 2 2 t ω rel = vrel / Rt = (0.600 m/s)/0.475 m = 1.263 rad/s This is the angular velocity of the train relative to the disk. Relative to the earth ωt = ωrel + ωd . Thus Ltrain = I tωt = I t (ωrel + ωd ). L2 = L1 says Ldisk = − Ltrain Ldisk = I dωd , where I d = 12 md Rd2 1 2 md Rd2ωd = − I t (ωrel + ωd ) I tωrel (0.2708 kg ⋅ m 2 )(1.263 rad/s) =−1 = −0.30 rad/s. 2 md Rd + I t (7.00 kg)(0.500 m) 2 + 0.2708 kg ⋅ m 2 2 2 ωd = − 1 EVALUATE: The minus sign tells us that the disk is rotating clockwise relative to the earth. The disk and train rotate in opposite directions, since the total angular momentum of the system must remain zero. Note that we applied L1 = L2 in an inertial frame attached to the earth. 10.98. IDENTIFY: Apply conservation of momentum to the system of the runner and turntable. SET UP: Let the positive sense of rotation be the direction the turntable is rotating initially. © Copyright 2012 Pearson Education, Inc. All rights reserved. This material is protected under all copyright laws as they currently exist. No portion of this material may be reproduced, in any form or by any means, without permission in writing from the publisher. Dynamics of Rotational Motion 10-41 EXECUTE: The initial angular momentum is I ω1 − mRv1 , with the minus sign indicating that runner’s motion is opposite the motion of the part of the turntable under his feet. The final angular momentum is I ω − mRv1 ω2 ( I + mR 2 ), so ω2 = 1 . I + mR 2 (80 kg ⋅ m 2 )(0.200 rad/s) − (55.0 kg)(3.00 m)(2.8 m/s) = −0.776 rad/s. (80 kg ⋅ m 2 ) + (55.0 kg)(3.00 m) 2 EVALUATE: The minus sign indicates that the turntable has reversed its direction of motion. This happened because the man had the larger magnitude of angular momentum initially. IDENTIFY: Follow the method outlined in the hint. SET UP: J = mΔvcm . ΔL = J ( x − xcm ). ω2 = 10.99. EXECUTE: The velocity of the center of mass will change by Δvcm = J/m and the angular velocity will change J ( x − xcm ) . The change in velocity of the end of the bat will then be Δvend = Δvcm − Δω xcm = I J J (x − xcm ) xcm − ⋅ Setting Δvend = 0 allows cancellation of J and gives I = ( x − xcm ) xcm m, which when m I I (5.30 × 10−2 kg ⋅ m 2 ) solved for x is x = + xcm = + (0.600 m) = 0.710 m. xcm m (0.600 m)(0.800 kg) EVALUATE: The center of percussion is farther from the handle than the center of mass. IDENTIFY: Apply conservation of energy to the motion of the ball. 2 SET UP: In relating 12 mvcm and 12 I ω 2 , instead of vcm = Rω use the relation derived in part (a). I = 52 mR 2 . by Δω = 10.100. EXECUTE: (a) Consider the sketch in Figure 10.100. The distance from the center of the ball to the midpoint of the line joining the points where the ball is in contact with the rails is R 2 − ( d /2) 2 , so vcm = ω R 2 − d 2 /4 . When d = 0, this reduces to vcm = ω R, the same as rolling on a flat surface. When d = 2 R, the rolling radius approaches zero, and vcm → 0 for any ω. 2 ⎡ ⎛ ⎞ ⎤ mv 2 ⎡ ⎤ 1 2 1 2 1⎢ 2 vcm 2 ⎥ = cm 5 + 2⎜ ⎟ (b) K = mv + I ω = ⎢ mvcm + (2/5)mR ⎢ ⎥ 2 2 ⎥ 2 2 ⎜ R − (d /4) ⎟ 2 2 2 10 ⎢⎣ (1 − d /4 R ) ⎥⎦ ⎢⎣ ⎝ ⎠ ⎥⎦ Setting this equal to mgh and solving for vcm gives the desired result. (c) The denominator in the square root in the expression for vcm is larger than for the case d = 0, so vcm is smaller. For a given speed, ω is larger than in the d = 0 case, so a larger fraction of the kinetic energy is rotational, and the translational kinetic energy, and hence vcm , is smaller. (d) Setting the expression in part (b) equal to 0.95 of that of the d = 0 case and solving for the ratio d /R gives d /R = 1.05. Setting the ratio equal to 0.995 gives d /R = 0.37. 10 gh , the same as for a sphere rolling 7 = 0, as it should. EVALUATE: If we set d = 0 in the expression in part (b), vcm = down a ramp. When d → 2 R, the expression gives vcm Figure 10.100 © Copyright 2012 Pearson Education, Inc. All rights reserved. This material is protected under all copyright laws as they currently exist. No portion of this material may be reproduced, in any form or by any means, without permission in writing from the publisher. 10-42 10.101. Chapter 10 G G IDENTIFY: Apply ∑ Fext = macm and ∑τ z = I cmα z to the motion of the cylinder. Use constant acceleration equations to relate a x to the distance the object travels. Use the work-energy theorem to find the work done by friction. SET UP: The cylinder has I cm = 12 MR 2 . EXECUTE: (a) The free-body diagram is sketched in Figure 10.101. The friction force is μ MgR 2μ g fR f = μ k n = μ k Mg , so a = μk g. The magnitude of the angular acceleration is = k = k . I R (1/2) MR 2 (b) Setting v = at = ω R = (ω 0 − α t ) R and solving for t gives t = Rω0 Rω0 Rω0 = = , a + Rα μ k g + 2μ k g 3μ k g 2 ⎛ Rω0 ⎞ 1 1 R 2ω02 . and d = at 2 = ( μ k g ) ⎜ ⎟ = 2 2 ⎝ 3μ k g ⎠ 18μ k g (c) The final kinetic energy is (3/4) Mv 2 = (3/4) M ( at ) 2 , so the change in kinetic energy is 2 3 ⎛ Rω0 ⎞ 1 1 2 2 2 2 ΔK = M ⎜ μ k g ⎟ − MR ω0 = − MR ω0 . 4 ⎝ 3μk g ⎠ 4 6 EVALUATE: The fraction of the initial kinetic energy that is removed by friction work is 1 MRω 2 0 6 1 MRω 2 0 4 2 = . 3 This fraction is independent of the initial angular speed ω0 . Figure 10.101 10.102. IDENTIFY: The vertical forces must sum to zero. Apply Eq. (10.33). SET UP: Denote the upward forces that the hands exert as FL and FR . τ = ( FL − FR )r , where r = 0.200 m. Iω EXECUTE: The conditions that FL and FR must satisfy are FL + FR = w and FL − FR = Ω , where the r second equation is τ = ΩL, divided by r. These two equations can be solved for the forces by first adding 1⎛ Iω ⎞ 1⎛ Iω ⎞ and then subtracting, yielding FL = ⎜ w + Ω ⎟ and FR = ⎜ w − Ω ⎟ . Using the values 2⎝ r ⎠ 2⎝ r ⎠ w = mg = (8.00 kg)(9.80 m/s 2 ) = 78.4 N and I ω (8.00 kg)(0.325 m)2 (5.00 rev/s × 2π rad/rev) = = 132.7 kg ⋅ m/s gives r (0.200 m) FL = 39.2 N + Ω(66.4 N ⋅ s), FR = 39.2 N − Ω(66.4 N ⋅ s). (a) Ω = 0, FL = FR = 39.2 N. (b) Ω = 0.05 rev/s = 0.314 rad/s, FL = 60.0 N, FR = 18.4 N. (c) Ω = 0.3 rev/s = 1.89 rad/s, FL = 165 N, FR = − 86.2 N, with the minus sign indicating a downward force. © Copyright 2012 Pearson Education, Inc. All rights reserved. This material is protected under all copyright laws as they currently exist. No portion of this material may be reproduced, in any form or by any means, without permission in writing from the publisher. Dynamics of Rotational Motion 10-43 39.2 N = 0.590 rad/s, which is 0.0940 rev/s. 66.4 N ⋅ s EVALUATE: The larger the precession rate Ω, the greater the torque on the wheel and the greater the difference between the forces exerted by the two hands. IDENTIFY: The answer to part (a) can be taken from the solution to Problem 10.96. The work-energy theorem says W = ΔK . SET UP: Problem 10.96 uses conservation of angular momentum to show that r1v1 = r2v2 . (d) FR = 0 gives Ω = 10.103. EXECUTE: (a) T = mv12r12 /r 3. G G G G (b) T and dr are always antiparallel. T ⋅ dr = − Tdr. r2 r1 dr r1 r2 r3 W = − ∫ T dr = mv12 r12 ∫ = mv12 2 ⎡ 1 1 ⎤ r1 ⎢ 2 − 2 ⎥ . 2 ⎢⎣ r2 r1 ⎥⎦ 1 mv 2 (c) v2 = v1(r1 /r2 ), so ΔK = m(v22 − v12 ) = 1 [(r1 /r2 ) 2 − 1], which is the same as the work found in part (b). 2 2 G EVALUATE: The work done by T is positive, since T is toward the hole in the surface and the block moves toward the hole. Positive work means the kinetic energy of the object increases. © Copyright 2012 Pearson Education, Inc. All rights reserved. This material is protected under all copyright laws as they currently exist. No portion of this material may be reproduced, in any form or by any means, without permission in writing from the publisher.
 0
0
Anuncio
Documentos relacionados


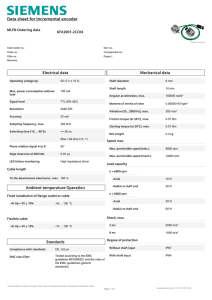



Descargar
Anuncio
Añadir este documento a la recogida (s)
Puede agregar este documento a su colección de estudio (s)
Iniciar sesión Disponible sólo para usuarios autorizadosAñadir a este documento guardado
Puede agregar este documento a su lista guardada
Iniciar sesión Disponible sólo para usuarios autorizados