Tema 1
Anuncio

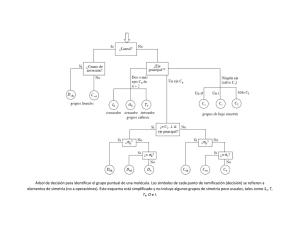
Tema 1: Simetría y teoría de grupos. Ejemplo 2: amoníaco, grupo puntual C3v: sistema de referencia: Tema 1: Simetría y teoría de grupos. Ejemplo 2: amoníaco, grupo puntual C3v: sistema de referencia: La rotación de 120º a través del eje z traslada un punto de coordenadas (x,y) a uno de nuevas coordenadas (x’,y’): En azul se representa el nuevo sistema de coordenadas rotado un ángulo Tema 1: Simetría y teoría de grupos. Ejemplo 2: amoníaco, grupo puntual C3v: sistema de referencia: Podemos determinar las nuevas coordenadas (x’,y’) a partir de las (x,y) expresadas en el sistema de referencia fijo (en negro): Tema 1: Simetría y teoría de grupos. Ejemplo 2: amoníaco, grupo puntual C3v: sistema de referencia: Tema 1: Simetría y teoría de grupos. Ejemplo 2: amoníaco, grupo puntual C3v: sistema de referencia: Tema 1: Simetría y teoría de grupos. Ejemplo 2: amoníaco, grupo puntual C3v: sistema de referencia: calculemos el pedacito… Tema 1: Simetría y teoría de grupos. Ejemplo 2: amoníaco, grupo puntual C3v: sistema de referencia: entonces: x’ = x cos - y sen calculemos ahora y’ : Tema 1: Simetría y teoría de grupos. Ejemplo 2: amoníaco, grupo puntual C3v: sistema de referencia: Tema 1: Simetría y teoría de grupos. Ejemplo 2: amoníaco, grupo puntual C3v: sistema de referencia: entonces: y’ = x sen + y cos Tema 1: Simetría y teoría de grupos. Ejemplo 2: amoníaco, grupo puntual C3v: sistema de referencia: CONCLUSIÓN: x’ = x cos - y sen y’ = x sen + y cos CON = 2/3 = 120º PARA AMONÍACO. Tema 1: Simetría y teoría de grupos. Ejemplo 2: amoníaco, grupo puntual C3v: así que las matrices de transformación son: Notar que siempre el plano vertical en el NH3 debe contener el átomo de nitrógeno y uno de los hidrógenos, dejando dos hidrógenos para el cambio tras la operación. Tema 1: Simetría y teoría de grupos. También se observa que en las matrices, z nunca esta mezclada con x o con y, esto es, z’ es función de z solamente. Por tanto, z constituye una representación irreducible independiente del grupo. Por otra parte x Y y forman conjuntamente una representación. Esto es equivalente a ver las matrices en forma de bloques diagonalizados. Tema 1: Simetría y teoría de grupos. con diagonales: Tema 1: Simetría y teoría de grupos. Con las propiedades de los caracteres de las representaciones irreducibles podemos hallar la que falta!. Tema 1: Simetría y teoría de grupos. Propiedades de los caracteres de las representaciones irreducibles en los grupos puntuales (2do ejemplo: amoníaco C3v): Primero: el número total de operaciones de simetría en un grupo se denomina orden (h). h = 6 (6 operaciones de simetría: E, 2C3, 3sv) Tema 1: Simetría y teoría de grupos. Segundo: las operaciones de simetría se arreglan en clases. Todas las operaciones de una misma clase tienen los mismos caracteres para sus matrices transformación. Tema 1: Simetría y teoría de grupos. Tercero: El número de representaciones irreducibles debe ser igual al número de clases. Estos significa que la tabla de caracteres debe ser cuadrada. Tema 1: Simetría y teoría de grupos. Cuarto: la suma del cuadrado de las dimensiones (caracteres debajo E) para cada una de las representaciones irreducibles debe ser igual al orden del grupo. h i ( E ) 2 i Tema 1: Simetría y teoría de grupos. Quinto: para una representación irreducible en particular, la suma de los cuadrados de los caracteres multiplicado por el número de operaciones de una misma clase, es igual al orden del grupo. h i ( R) 2 R Tema 1: Simetría y teoría de grupos. Tema 1: Simetría y teoría de grupos. Sexto: las representaciones irreducibles son ortogonales entre sí. La suma de los productos de los caracteres, multiplicados por el número de clase, de cualquier par de representaciones irreducibles es igual a cero. ( R) i R j ( R) 0 para i ≠ j Tema 1: Simetría y teoría de grupos. Tema 1: Simetría y teoría de grupos. Séptimo: todos los grupos tienen una representación irreducible totalmente simétrica, que tiene todos los caracteres igual a 1 para todas las operaciones. Tema 1: Simetría y teoría de grupos. Ahora podemos completar el resto de los caracteres para la representación irreducible que nos faltaba: Tema 1: Simetría y teoría de grupos. Finalmente queda: Tema 1: Simetría y teoría de grupos. Ahora asignemos nombres a las rep. irred. encontradas: con los siguientes significados: Tema 1: Simetría y teoría de grupos. 1.- Todas las representaciones unidimensionales se designan mediante A o B. E (no me refiero a oper. ident.)es el símbolo para las representaciones bidimensionales. Los casos tridimensionales se designan por medio de T (o a veces F). Tema 1: Simetría y teoría de grupos. 2.- Las representaciones unidimensionales que son simétricas con respecto a la rotación por 2/n alrededor del eje principal Cn (significa simétrico (Cn) = 1) se designan por A, mientras que aquellas antisimétricas ((Cn) = -1) se designan por B. Tema 1: Simetría y teoría de grupos. 3.- Los subíndices 1 y 2 van unidos a los A y B para designar aquellos que son, respectivamente, simétrico o antisimétrico con respecto a un eje C2 perpendicular al eje principal, o bien si no existe ese eje, a un plano vertical de simetría. Tema 1: Simetría y teoría de grupos. 4.- Las primas y dobles primas van unidas a todas las letras, cuando sea conveniente, para indicar las que sean simétricas o asimétricas, respectivamente, con respecto a sh. 5.- En los grupos con un centro de inversión, el subíndice g (del vocablo alemán gerade que significa par) se une a los símbolos de las representaciones que son simétricas con respecto a la inversión, y el subíndice u (ungerade en alemán, impar) se utiliza para aquellos asimétricos a la inversión. 6.- En uso de los subíndices numéricos para E y T, también sigue ciertas reglas, pero éstas no pueden establecerse fácilmente sin un desarrollo matemático previo. Nos bastará considerarlos como denominaciones arbitrarias. Tema 1: Simetría y teoría de grupos. Recapitulando, la tabla de caracteres para el grupo C3v es la siguiente: zona 1 ☜ zona 2 ☜ zona 3 ☜ zona 4 ☜ Tema 1: Simetría y teoría de grupos. Repaso sobre la zona 3: En la zona 3 se encuentran siempre tres símbolos: x, y, z, Rx, Ry, Rz. Los tres primeros representan las coordenadas x, y, z. Los símbolos R establecen las rotaciones en torno a los ejes especificados con los subíndices. En las matrices de transformación se nota que x’ es función de x Y y. Además z’ es solo función de z. Tema 1: Simetría y teoría de grupos. Repaso sobre la zona 3: De modo que (x, y), Y z constituyen entre sí representaciones diferentes. Tema 1: Simetría y teoría de grupos. Repaso sobre la zona 3: Para las propiedades de transformación de las rotaciones tenemos lo siguiente: se coloca una flecha curva en torno al eje elegido para la rotación. Dicha flecha alrededor del eje z se transforma en sí misma mediante E. Tema 1: Simetría y teoría de grupos. Repaso sobre la zona 3: La flecha alrededor del eje z se transforma en sí misma mediante C3. La flecha alrededor del eje z cambia su sentido con los planos verticales. Tema 1: Simetría y teoría de grupos. Repaso sobre la zona 3: Así se constituye la base para una representación irreducible con los caracteres: 1 1 -1, que corresponde a la A2. Esto se señala entonces como Rz en la zona 3. Tema 1: Simetría y teoría de grupos. Repaso sobre la zona 3: Ahora: que pasa con los vectores Rx y Ry????. Hasta los momentos los ejemplos escogidos han sido muy sencillos porque los vectores se transforman en si mismos por las operaciones de simetría y por ellos las representaciones contenían únicamente 1. Esta condición no se cumple porque los dos vectores dependen entre sí y son mezclas de los originales; no pueden por lo tanto discutirse por separado. Es decir, la idea de la flecha circular no me sirve; pero un punto sí… Tema 1: Simetría y teoría de grupos. Repaso sobre la zona 3: Al aplicar C3 el punto gira 120º. Las nuevas coordenadas de rotación son: 1 3 Rx Rx Ry 2 2 ' 3 1 Ry Rx Ry 2 2 ' Tema 1: Simetría y teoría de grupos. Repaso sobre la zona 3: La expresión de transformación de los vectores es muy engorrosa. Puede simplificarse mediante las siguientes matrices: para C31 Tema 1: Simetría y teoría de grupos. Repaso sobre la zona 3: La expresión de transformación de los vectores es muy engorrosa. Puede simplificarse mediante las siguientes matrices: para C32 Tema 1: Simetría y teoría de grupos. Repaso sobre la zona 3: Las matrices de transformación para todas las demás operaciones de simetría, usando como base los vectores Rx y Ry son las siguientes: para E Tema 1: Simetría y teoría de grupos. Repaso sobre la zona 3: para el primer plano vertical Tema 1: Simetría y teoría de grupos. Repaso sobre la zona 3: para el segundo plano vertical Tema 1: Simetría y teoría de grupos. Repaso sobre la zona 3: para el tercer plano vertical Tema 1: Simetría y teoría de grupos. Tema 1: Simetría y teoría de grupos. que corresponde bien con la representación irreducible E. NOTA: Sí se coloca el punto magenta en (y) el razonamiento es análogo y conduce a la misma conclusión.