EXAMEN DE CONTROL AUTOMÁTICO
EXAMEN DE RECUPERACION
MARZO 3 DE 2009
PRIMER TEMA: (35 puntos)
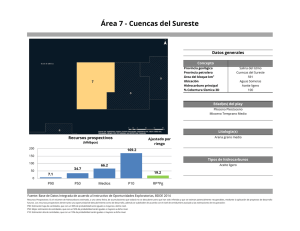
El gráfico muestra dos tanques cuya sección transversal tiene un área A y que están acoplados. Las
presiones , el equilibrio volumétrico y los flujos están definidos por:
P1 K H 1 ; P 2 X K H 2
dH 1
dH 2
A
Q1 Q 2 ; A
Q 2 Q3
dt
dt
Q 2 K 2 P1 X ; Q3 K 3 Z X P 3
(15 puntos) Linearice las ecuaciones alrededor de su punto de trabajo.
(10 puntos) Dibuje el diagrama funcional del sistema graficando en cada bloque la respuesta al
escalón correspondiente teniendo como señales de entrada ”z” y salida “x”.
c. (10 puntos) Aplicando Mason encuentre la Función de Transferencia del sistema. X(s)/Z(s)
SEGUNDO TEMA: (30 puntos)
a.
b.
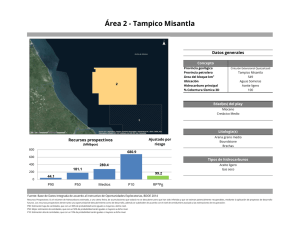
El gráfico muestra una planta nuclear. Dada la necesidad de ubicar el sensor de temperatura fuera del
reactor se produce un retardo en la medición.
Se desea incorporar un controlador integral “I” que garantice un error de velocidad finito de 5%.
Adicionalmente será necesario incorporar un compensador de tal manera que el Margen de Fase sea 45°.
Encuentre el valor de K y del compensador adecuado.
e jTo
K
1 j / z
Gp( j )
; Gc( j )
; H ( j ) 1 ; Gcomp( j )
; Tr 0.2 _ sec. ; To 0.05 _ sec.
1 jTr
j
1 j / p
TERCER TEMA: (35 puntos)
Un sistema de realimentación negativa de lazo simple tiene una función de transferencia de lazo:
GH ( s)
K ( s 2) 2
s( s 2 1)( s 8)
a. (20 puntos) Dibújese el lugar de las raíces para 0<K<inf. con el fin de indicar sus
características significativas.
b. (5 puntos) Determínese el intervalo de la ganancia K para cual el sistema es estable.
c. (5 puntos) Para qué valores de K en el intervalo de K>0 existen raíces puramente
imaginarias? Cuáles son los valores de estas raíces?
d. (5 puntos) Con relación a la dominancias, indique si el sistema tiene dominancia de segundo
orden para valores de K>50?
Solución:
Primer Tema.
a ) Linearizando _ las _ ecuaciones _ alrededor _ del _ punto _ de _ trabajo :
1. P1 K H 1 p1 K h1
2. P 2 X K H 2 x K h 2
dH 1
dh1
1
3. A
Q1 Q 2
q2
dt
dt
A
dH 2
dh 2 1
4. A
Q 2 Q3
(q 2 q 3)
dt
dt
A
K2
5. Q 2 K 2 P1 X q 2
( p1 x)
2 P10 X 0
K3Z0
6. Q 3 K 3 Z X P 3 q 3
x K 3 X 0 P3 z
2 X 0 P3
b)
c) Funcion _ de _ transferencia : X ( s) / Z ( s)
1 n
AplicandoMason :
k 1 Pijk ijk
* _ un _ ca min o _ directo _ con _ su _ cofactor
* _ tres _ lazos
* _ dos _ lazos _ dist int os
X (s)
Z ( s)
KK 3 X 0 P 3
KK 2
1
As
2 A P10 X 0 s
KK 3Z 0
KK 2
KK 2
K 2 K 2 K 3Z 0
1
2
2 A X 0 P 3 s 2 A P10 X 0 s 2 A P10 X 0 s 4 A X 0 P 3 P10 X 0 s 2
X (s)
Z ( s)
KK 3 X 0 P 3 (2 A P10 X 0 s KK 2)
2 A2 P10 X 0 s 2
KK 3Z 0
KK 2
K 2 K 2 K 3Z 0
1
2
2 A X 0 P 3 s A P10 X 0 s 4 A X 0 P 3 P10 X 0 s 2
X (s)
2 KK 3( X 0 P 3)(2 A P10 X 0 s KK 2)
2
Z ( s ) 4 A X 0 P 3 P10 X 0 s 2 2 AK ( K 3Z 0 P10 X 0 2 K 2 X 0 P 3 ) s K 2 K 2 K 3Z 0
Segundo tema.
ess 5%
Seleccion _ Controlador : Gc( s)
K v lim sGH ( s) lim s
s 0
s 0
K
s
Ke sTo
1
K ; ess
0.05 K v 20
s(1 sTr )
Kv
Grafico _ de _ Bode _ sin_ compensacion : GH sc ( j )
GHsc=tf(20,[0.2 1 0],'InputDelay',0.05)
margin(GHsc)
Se selecciona un compensador de atraso de fase;
adelanto de fase no es aplicable debido a que la
fase disminuye rápidamente en la frecuencia de
cruce, ver Tabla 10.7 libro Dorf.
Se selecciona un compensador de atraso de fase.
Wc=3
Alpha=10^(15/20)
z=Wc/10
p=z/Alpha
Gcomp=tf([1/z 1 ],[1/p 1])
GHcc=series(Gcomp,GHsc)
margin(GHcc)
Wc = 3
Alpha = 5.6234
z = 0.3000
p = 0.0533
Transfer function:
3.333 s + 1
----------18.74 s + 1
Transfer function:
66.67 s + 20
exp(-0.05*s) * ----------------------------3.749 s^3 + 18.94 s^2 + s
20e j 0.05
j (1 j 0.2 )
Tercer Tema.
( s 2) 2
0
s ( s 1)( s 8)
n4 ; m2
Centroide :
a) 1 K
2
n
p j i 1 zi
m
(8) 2(2)
2
nm
2
(2q 1)
a
180o ; q 0,1, 2,..., ( n m 1) a 90o , 270o
nm
Angulo _ de _ salida :
a
j 1
m
n
i 1
k 1
k j
1
1
j _ salida s j zi s j pk 180o 2 tan 1 ( p 90 90 tan 1 ) 180
2
8
p 52 8 44o
b) Intervalo _ de _ K :
( s 2) 2
0 s( s 2 1)( s 8) K ( s 2) 2 0 ; s 4 8s 3 ( K 1) s 2 (4 K 8) s 4 K 0
s ( s 2 1)( s 8)
b.1) Aplicando _ Routh Hurwitz :
E.C.: 1 K
s4
s3
s2
s1
s0
1
8
a
b
4K
a
K 1 4K
4K 8
4K
8K 8 8 4 K K
8
8
K 0
c) Ecuacion _ auxiliar : as 2 4 K 0
K 2
s 4 K 0 ; s j 2 2 o
8
d ) El _ sistema _ no _ tiene _ do min ancia _ de _ segundo _ orden.
a(4 K 8) 32 K
b
; 2 K ( K 14) 0 K 0 _ y _ K 14 K crit
a
Sistema _ condicionalmente _ estable
Rango _ de _ estabilidad : 14 K
b.2) (Otra _ alternativa ) A _ partir _ de _ la _ E.C.
1 KF ( s ) 0 ; F ( s)
F ( j )
o
KF ( jo ) K
( s 2) 2
; s j ; KF ( j ) 1 F ( j ) 180 ; KF ( jo ) 1
o
s ( s 2 1)( s 8)
4o
8 8o3
4 2 j 4
180 tan 1
tan 1 o4
180 ;
2
2
( 4 2 ) j (8 8 3 )
4
o
o o
o
(4 o 2 ) 2 (4o ) 2
( o2 ) 2 (8o 8o3 ) 2
4
o
Rango _ de _ estabilidad : 14 K
Frecuencia _ de _ resonancia : o 2 2
1 K K crit 14
4o
8
4 o2
o
o 2 2
 0
0