7.2. Control de Posición mediante Linealización por Realimentación
Anuncio

Capítulo7. Control No-lineal para Posicionamiento del Servomecanismo Neumático
Figura 7.3: Sistema con control en modo deslizante
7.2.
Control de Posición mediante Linealización por Realimentación
Teniendo en cuenta el modelo matemático del servomecanismo neumático, representado
por las ecuaciones:
𝑥˙ 1 =
𝑥˙ 2 =
𝑥˙ 3 =
𝑥˙ 4 =
𝑥˙ 5 =
𝑘𝐴 (𝐴𝑟𝑠1 (𝑢)𝑓11 − 𝐴𝑟5 (𝑢)𝑓12 ) − 𝑥1 𝑥4
𝑥𝐴
−𝑘𝐵 (𝐴𝑟𝑠1 (𝑢)𝑓22 − 𝐴𝑟5 (𝑢)𝑓21 ) + 𝑥2 𝑥4
𝑥𝐵
𝑥4
𝐴𝑒 (𝑥1 − 𝑥2 ) − 𝐹𝑓 (𝑥4 , 𝑥5 )
𝑚𝑒
2𝜎0
𝑥4 −
𝜉(𝑥4 )𝑥5
𝜋
con
𝑥𝐴 = 𝑥3 + 𝑥𝑎𝑟 +
𝑉𝑚1
𝐴𝑒
𝑥𝐵 = 𝐿 − 𝑥3 + 𝑥𝑏𝑟 +
𝜉(𝑥4 ) =
𝑥4 atan(𝑘𝑣 𝑥4 )
𝑔(𝑥4 )
135
𝑉𝑚2
𝐴𝑒
(7.35)
(7.36)
(7.37)
(7.38)
(7.39)
Capítulo7. Control No-lineal para Posicionamiento del Servomecanismo Neumático
y
𝑓11 =
𝑓12 =
𝑓21 =
𝑓22 =
)
(
𝑥1
𝑓 𝑃𝑠 , 𝑇𝑠 ,
𝑃𝑠
(
)
𝑃0
𝑓 𝑥1 , 𝑇𝑎 ,
𝑥1
)
(
𝑥2
𝑓 𝑃𝑠 , 𝑇𝑠 ,
𝑃𝑠
(
)
𝑃0
𝑓 𝑥2 , 𝑇𝑏 ,
𝑥2
Con base en la teoría de control no-lineal mediante linealización por realimentación, el
control de posición para el servomecanismo se puede diseñar considerando al sistema como
tipo SISO donde la señal de control 𝑢 se puede obtener como:
⎧
𝑢(𝐴𝑟𝑠1 ) si 𝑒 < 0
⎨
𝑢=
𝑢(𝐴𝑟5 )
si 𝑒 > 0
⎩ 𝑢
si 𝑒 = 0
(7.40)
0
donde 𝑒 = 𝑥3 − 𝑥𝑑 , 𝑥3 es la posición del sistema, 𝑥𝑑 es la posición deseada, 𝑢0 = 5.06 𝑉 .
Puesto que la posición del sistema 𝑦1 = 𝑥3 , entonces:
(3)
𝑦1 =
]
1 [
𝐴𝑒 (𝑥˙ 1 − 𝑥˙ 2 ) − 𝐹˙𝑓
𝑚𝑒
(7.41)
con
donde
[
)]
2𝜎0 ( ˙
˙
𝐹𝑓 = 𝜎0 𝑥˙ 5 + 𝜎1 𝑥˙ 4 −
𝑥5 𝜉 + 𝜉 𝑥˙ 5 + 𝐵 𝑥˙ 4
𝜋
(7.42)
[
]
′ (𝑥 )
𝑘
𝑥
𝑥
atan(𝑘
𝑥
)𝑔
𝑥
˙
𝑣
4
4
𝑣
4
4
4
𝜉˙ =
+ atan(𝑘𝑣 𝑥4 ) −
𝑔(𝑥4 ) 1 + (𝑘𝑣 𝑥4 )2
𝑔(𝑥4 )
(7.43)
De la ecuación (7.41) se puede inferir que el grado relativo del sistema para la salida 𝑦1 es
𝛾1 = 3. Esta ecuación se puede expresar como:
(3)
𝑦1 = 𝑚1
𝑒
[
𝐴𝑒
[(
𝑘𝐴 𝑓11
𝑘 𝑓
+ 𝐵𝑥 22
𝑥𝐴
𝐵
)
(
)
(
)]
]
𝑘 𝑓
𝑘 𝑓
𝑥 𝑥
𝑥 𝑥
𝐴𝑟𝑠1 (𝑢)− 𝐴𝑥 12 + 𝐵𝑥 21 𝐴𝑟5 (𝑢)− 𝑥1 4 + 𝑥2 4 −𝐹˙𝑓
𝐴
𝐵
𝐴
𝐵
(7.44)
Ahora, si 𝑒 > 0 entonces 𝐴𝑟𝑠1 = 0, por lo tanto:
(3)
𝑦1
[ [ (
)
(
)]
]
1
𝑘𝐴 𝑓12 𝑘𝐵 𝑓21
𝑥1 𝑥4 𝑥2 𝑥4
˙
=
𝐴𝑒 −
+
𝐴𝑟5 (𝑢) −
+
− 𝐹𝑓 = 𝑣
𝑚𝑒
𝑥𝐴
𝑥𝐵
𝑥𝐴
𝑥𝐵
donde
136
(7.45)
Capítulo7. Control No-lineal para Posicionamiento del Servomecanismo Neumático
...
𝑣 = 𝑥 𝑑 − 𝑘0 𝑒 − 𝑘1 𝑒˙ − 𝑘2 𝑒¨
(7.46)
donde 𝑘0 , 𝑘1 y 𝑘2 son constantes positivas. Según la ecuación (7.27) se deducen las derivadas
de Lie como:
𝐿3f ℎ(x)
(
[
)
]
1
𝑥1 𝑥4 𝑥2 𝑥4
˙
=
−𝐴𝑒
+
− 𝐹𝑓
𝑚𝑒
𝑥𝐴
𝑥𝐵
𝐿g 𝐿2f ℎ(x)
𝐴𝑒
=−
𝑚𝑒
(
𝑘𝐴 𝑓12 𝑘𝐵 𝑓21
+
𝑥𝐴
𝑥𝐵
(7.47)
)
(7.48)
por lo tanto:
𝐴𝑟5 (𝑢) =
1
[
𝐿g 𝐿2f ℎ(x)
−𝐿3f ℎ(x) + 𝑣
]
(7.49)
Si 𝑒 < 0 entonces 𝐴𝑟5 = 0, por lo tanto:
(3)
𝑦1
)
(
)]
]
[ [(
1
𝑥1 𝑥4 𝑥2 𝑥4
𝑘𝐴 𝑓11 𝑘𝐵 𝑓22
˙
=
+
𝐴𝑟𝑠1 (𝑢) −
+
− 𝐹𝑓 = 𝑣
𝐴𝑒
𝑚𝑒
𝑥𝐴
𝑥𝐵
𝑥𝐴
𝑥𝐵
(7.50)
de donde
𝐿3f ℎ(x)
)
[
(
]
1
𝑥1 𝑥4 𝑥2 𝑥4
˙
+
=
−𝐴𝑒
− 𝐹𝑓
𝑚𝑒
𝑥𝐴
𝑥𝐵
𝐿g 𝐿2f ℎ(x) =
𝐴𝑒
𝑚𝑒
(
𝑘𝐴 𝑓11 𝑘𝐵 𝑓22
+
𝑥𝐴
𝑥𝐵
(7.51)
)
(7.52)
por lo tanto:
𝐴𝑟𝑠1 (𝑢) =
1
[
𝐿g 𝐿2f ℎ(x)
−𝐿3f ℎ(x) + 𝑣
]
(7.53)
La ecuación 7.46 se puede expresar como:
...
𝑣 = 𝑥 𝑑 − 𝑘0 (𝑥3 − 𝑥𝑑 ) − 𝑘1 (𝑥4 − 𝑥˙ 𝑑 ) − 𝑘2 (𝑥˙ 4 − 𝑥
¨𝑑 )
(7.54)
El voltaje de control 𝑢 se obtiene a partir de las curvas experimentales 𝑢 vs. 𝐴𝑟 , realizando un ajuste no-lineal por tramos. El voltaje 𝑢 puede expresarse en términos de 𝐴𝑟𝑠1 y 𝐴𝑟5
mediante las relaciones:
137
Capítulo7. Control No-lineal para Posicionamiento del Servomecanismo Neumático
1. Para 𝑒 < 0
⎧
(0.3908𝐴𝑟𝑠 )
(−207.6𝐴𝑟𝑠 )
1 − 6.613𝑒
1
5.472𝑒
⎨
𝑢=
112.98𝐴4𝑟𝑠 − 65.873𝐴3𝑟𝑠 + 13.458𝐴2𝑟𝑠 + 1.588𝐴𝑟𝑠1 + 5.448
1
1
1
⎩
(69.9𝐴𝑟𝑠 )
(1.769𝐴𝑟𝑟𝑠 )
1 + 3.403𝑒
1
1.124 × 10−15 𝑒
si 0.01 ≤ 𝐴𝑟𝑠1 ≤ 0.1414
(7.55)
si 0.1414 < 𝐴𝑟𝑠1 ≤ 0.482
si 0.482 < 𝐴𝑟𝑠1 ≤ 0.507
2. Para 𝑒 > 0
⎧
⎨ 5.472𝑒(0.3908𝐴𝑟5 ) − 6.613𝑒(−207.6𝐴𝑟5 )
𝑢=
⎩ −1138.6𝐴4 + 1223.4𝐴3 − 484.46𝐴2 + 80.146𝐴𝑟 − 0.5011
𝑟5
𝑟5
𝑟5
5
si 0.01 ≤ 𝐴𝑟𝑠1 ≤ 0.1627
(7.56)
si 0.1627 < 𝐴𝑟5 ≤ 0.5079
3. Para 𝑒 = 0
(7.57)
𝑢 = 𝑢0
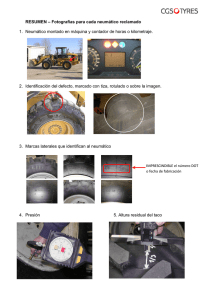
La figura 7.4 muestra la curva 𝐴𝑟𝑠1 vs. 𝑢 donde 𝑢 se obtuvo a partir de la ecuación (7.55)
Figura 7.4: Curva 𝐴𝑟𝑠1 vs. 𝑢
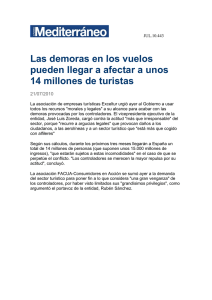
La figura 7.5 muestra la curva 𝐴𝑟5 vs. 𝑢 donde 𝑢 se obtuvo a partir de la ecuación (7.56)
7.3.
Control de Posición mediante Modo Deslizante
En primera instancia se define la ecuación para la superficie de deslizamiento 𝑆(x; 𝑡)
como:
(
𝑆(x; 𝑡) =
)𝑛−1
𝑑
+𝜆
𝑥
˜
𝑑𝑡
(7.58)
donde 𝜆 es una constante estrictamente positiva y 𝑥
˜ = 𝑥3 − 𝑥𝑑 . El modelo matemático del
servomecanismo neumático representado por las ecuaciones de estado (7.35)-(7.39) presenta
138
Capítulo7. Control No-lineal para Posicionamiento del Servomecanismo Neumático
Figura 7.5: Curva 𝐴𝑟5 vs. 𝑢
cinco ecuaciones diferenciales de primer orden, las dos primeras describen la dinámica de
la presión en las cámaras A y B del cilindro neumático, las cuales trabajan en paralelo compartiendo la misma entrada implícita, el voltaje de entrada a la válvula proporcional 𝑢. La
tercera y cuarta ecuaciones describen la dinámica del émbolo y la quinta describe la dinámica
del modelo de fricción. Teniendo en cuenta las ecuaciones (7.35), (7.35) y (7.37) como ecuaciones relevantes para determinar el orden efectivo del sistema, se puede establecer que para
el control de posición el orden efectivo es 𝑛 = 3, por lo tanto la superficie de deslizamiento
para el servomecanismo neumático puede expresarse como:
¨˜ + 2𝜆𝑥
𝑠(x; 𝑡) = 𝑥
˜˙ + 𝜆2 𝑥
˜˙
(7.59)
𝑆 𝑆˙ ≤ −𝜂∣𝑆∣
(7.60)
de la condición de deslizamiento,
𝜂 es una constante estrictamente positiva. Se puede mantener la superficie de deslizamiento
en cero mediante una ley de control 𝑢𝑒𝑞 , que mantendría 𝑆 = 0, por lo tanto, la dinámica en
modo deslizante será:
...
¨˜ + 𝜆2 𝑥
𝑠˙ = 𝑥
˜ + 2𝜆𝑥
˜˙ = 0
(7.61)
La ecuación (7.61) permite obtener la ley de control equivalente 𝑢𝑒𝑞 . Con el fin de satisfacer
la condición de deslizamiento en presencia de imprecisiones en el modelo matemático, se
adiciona un término con diferentes valores a través de la superficie 𝑆, la ley de control queda
expresada como:
𝑢 = 𝑢𝑒𝑞 − 𝑘sat(𝑆/Ψ)
139
(7.62)
Capítulo7. Control No-lineal para Posicionamiento del Servomecanismo Neumático
donde 𝑘 es la ganancia del controlador definida como una función de las variables de estado,
Ψ es el espesor de una y la función sat definida como:
⎧
−1 si 𝑦 < −1
⎨
sat(𝑦) =
𝑦
si ∣𝑦∣ ≤ 1
⎩ 1
si 𝑦 > 1
(7.63)
La ecuación (7.61) se puede expresar como:
...
...
𝑥 3 − 𝑥 𝑑 + 2𝜆(¨
𝑥3 − 𝑥
¨𝑑 ) + 𝜆2 (𝑥˙ 3 − 𝑥˙ 𝑑 ) = 0
(7.64)
La tercera derivada de la posición del émbolo se puede escribir como:
]
1 [
...
𝑥3 = 𝑥
𝐴𝑒 (𝑥˙ 1 − 𝑥˙ 2 ) − 𝐹˙𝑓
¨4 =
𝑚𝑒
(7.65)
donde 𝐹˙𝑓 = 𝜎0 𝑥˙ 5 + 𝜎1 𝑥
¨5 + 𝐵 𝑥˙ 4 . Reemplazando las ecuaciones (7.35) y (7.35) en (7.65), se
obtiene:
...
𝑥
1
3= 𝑚
𝑒
[
𝐴𝑒
((
𝑘
𝑘𝐴
𝑓 + 𝐵
𝑥𝐴 11 𝑥𝐵
(
))
]
)
)
(
𝑘
𝑘
𝑥 𝑥
𝑥 𝑥
𝑓22 𝐴𝑟𝑠1 (𝑢𝑒𝑞 )− 𝑥𝐴 𝑓12 + 𝑥𝐵 𝑓21 𝐴𝑟5 (𝑢𝑒𝑞 )− 𝑥1 4 + 𝑥2 4 −𝐹˙𝑓
𝐴
𝐵
𝐴
𝐵
(7.66)
por lo tanto, la dinámica de deslizamiento se puede escribir como:
𝑠˙
=
1
𝑚𝑒
[
𝐴𝑒
((
𝑘𝐴
𝑘
𝑓 + 𝐵
𝑥𝐴 11 𝑥𝐵
𝑥 𝑑 +2𝜆
−...
(
1
𝑚𝑒
(
))
]
)
(
)
𝑘
𝑘
𝑥 𝑥
𝑥 𝑥
𝑓22 𝐴𝑟𝑠1 (𝑢𝑒𝑞 )− 𝑥𝐴 𝑓12 + 𝑥𝐵 𝑓21 𝐴𝑟5 (𝑢𝑒𝑞 )− 𝑥1 4 + 𝑥2 4 −𝐹˙𝑓 −
𝐴
[𝐴𝑒 (𝑥1 −𝑥2 )−𝐹𝑓 ]−¨𝑥𝑑
)
𝐵
𝐴
𝐵
+𝜆2 (𝑥4 −𝑥˙ 𝑑 )=0
(7.67)
La ley de control 𝑢𝑒𝑞 se obtiene considerando lo siguiente:
Si 𝑆 < 0, entonces 𝐴𝑟5 (𝑢𝑒𝑞 ) = 0, por lo tanto:
𝐴𝑟𝑠1 (𝑢𝑒𝑞 ) =
)
(
... 𝐴𝑒 ( 𝑥1 𝑥4 + 𝑥2 𝑥4 )+ 𝐹˙𝑓
𝑥𝑑 −𝜆2 (𝑥4 −𝑥˙ 𝑑 )+ 𝑥 𝑑 + 𝑚
−2𝜆 𝑚1 [𝐴𝑒 (𝑥1 −𝑥2 )−𝐹𝑓 ]−¨
𝑥𝐴
𝑥𝐵
𝑚𝑒
𝑒
𝑒
(
)
𝑘𝐵
𝐴𝑒 𝑘𝐴
𝑓
+
𝑓
11
22
𝑚
𝑥
𝑥
𝑒
𝐴
(7.68)
𝐵
si 𝑆 > 0, entonces 𝐴𝑟𝑠1 = 0, por lo tanto:
𝐴𝑟5 (𝑢𝑒𝑞 ) =
−2𝜆
(
1
𝑚𝑒
)
... 𝐴𝑒 ( 𝑥1 𝑥4 + 𝑥2 𝑥4 )+ 𝐹˙𝑓
−𝜆2 (𝑥4 −𝑥˙ 𝑑 )+ 𝑥 𝑑 + 𝑚
𝑥𝐴
𝑥𝐵
𝑚𝑒
𝑒
(
)
𝑘𝐵
𝐴𝑒 𝑘𝐴
−𝑚
𝑓
+
𝑓
12 𝑥
21
𝑥
[𝐴𝑒 (𝑥1 −𝑥2 )−𝐹𝑓 ]−¨𝑥𝑑
𝑒
𝐴
(7.69)
𝐵
la ley de control equivalente 𝑢𝑒𝑞 se determina mediante:
⎧
𝑢(𝐴𝑟𝑠1 ) si 𝑆 < 0
⎨
𝑢𝑒𝑞 =
𝑢0
si 𝑆 = 0
⎩ 𝑢(𝐴𝑟 ) si 𝑆 > 0
(7.70)
5
donde 𝑢0 = 5.06 𝑉 . Finalmente la ley de control total 𝑢 se obtiene a través de la ecuación
(7.62).
140
Capítulo7. Control No-lineal para Posicionamiento del Servomecanismo Neumático
7.4.
Implementación Práctica de los Controladores de Posición
En la implementación del controlador de posición se presenta la imposibilidad de medir
la variable 𝑥5 . Esta variable se puede estimar a partir de un observador no-lineal de estado
mediante la ecuación [76, 36, 20]:
𝜎0 ∣𝑥4 ∣ˆ
𝑥5
𝑥
ˆ˙ 5 = 𝑥4 −
− 𝑘𝑒
𝑔(𝑥4 )
(7.71)
donde 𝑒 = 𝑥3 − 𝑥𝑑 , es el error de seguimiento, 𝑥ˆ5 es el estado estimado de 𝑥5 y 𝑘 es una constante estrictamente positiva. La fuerza de fricción estimada 𝐹ˆ𝑓 se puede calcular mediante:
𝐹ˆ𝑓 = 𝜎0 𝑥
ˆ 5 + 𝜎1 𝑥
ˆ˙ 5 + 𝐵𝑥4
(7.72)
En [36] los autores demuestran que el observador para la variable de fricción (7.71) y (7.72)
aplicado a un actuador eléctrico hace que el error de posición converja asintóticamente a cero
si el controlador del actuador eléctrico es diseñado de tal forma que su función de transferencia sea real estrictamente positiva (SPR). Sin embargo el observador no-lineal (7.71) presenta
inestabilidad numérica en su implementación [36, 28]. Este hecho también se presentó en el
caso del servomecanismo neumático, por lo tanto, y en base a lo expuesto en [21], se optó
por aproximar la fuerza de fricción estimada como:
𝐹ˆ𝑓 = 𝐵𝑥4
(7.73)
˙
𝐹ˆ𝑓 = 𝐵 𝑥˙ 4
(7.74)
de tal forma que:
donde 𝑥˙ 4 es la aceleración que experimenta el émbolo.
7.4.1.
Implementación del Controlador mediante Linealización por Realimentación
Teniendo en cuenta las ecuación (7.74), las derivadas de Lie y áreas relativas quedan
establecidas como:
1. Si 𝑒 > 0
𝐿3f ℎ(x)
[
(
)
]
𝑥1 𝑥4 𝑥2 𝑥4
1
˙
ˆ
=
−𝐴𝑒
+
− 𝐹𝑓
𝑚𝑒
𝑥𝐴
𝑥𝐵
141
Capítulo7. Control No-lineal para Posicionamiento del Servomecanismo Neumático
𝐿g 𝐿2f ℎ(x) = −
𝐴𝑒
𝑚𝑒
(
𝑘𝐴 𝑓12 𝑘𝐵 𝑓21
+
𝑥𝐴
𝑥𝐵
1
𝐴𝑟5 (𝑢) =
[
𝐿g 𝐿2f ℎ(x)
−𝐿3f ℎ(x) + 𝑣
)
]
2. Si 𝑒 < 0
𝐿3f ℎ(x)
(
[
)
]
𝑥1 𝑥4 𝑥2 𝑥4
1
˙
ˆ
=
−𝐴𝑒
+
− 𝐹𝑓
𝑚𝑒
𝑥𝐴
𝑥𝐵
𝐿g 𝐿2f ℎ(x)
𝐴𝑒
=
𝑚𝑒
(
𝑘𝐴 𝑓11 𝑘𝐵 𝑓22
+
𝑥𝐴
𝑥𝐵
)
por lo tanto:
𝐴𝑟𝑠1 (𝑢) =
1
La ley de control 𝑢 queda establecida por:
⎧
𝑢(𝐴𝑟𝑠1 )
⎨
𝑢=
𝑢(𝐴𝑟5 )
⎩ 𝑢
0
7.4.2.
[
𝐿g 𝐿2f ℎ(x)
−𝐿3f ℎ(x) + 𝑣
si
𝑒<0
si
𝑒>0
si
𝑒=0
]
Implementación del Controlador por Modo Deslizante
Para este controlador las áreas relativas quedan establecidas como:
1. Si 𝑆 < 0
𝐴𝑟𝑠1 (𝑢𝑒𝑞 ) =
−2𝜆
(
1
𝑚𝑒
)
... 𝐴𝑒 ( 𝑥1 𝑥4 + 𝑥2 𝑥4 )+ 𝐹ˆ˙𝑓
−𝜆2 (𝑥4 −𝑥˙ 𝑑 )+ 𝑥 𝑑 + 𝑚
𝑥𝐴
𝑥𝐵
𝑚𝑒
𝑒
(
)
𝑘𝐵
𝐴𝑒 𝑘𝐴
𝑓
+
𝑓
11
22
𝑚
𝑥
𝑥
(7.75)
)
... 𝐴𝑒 ( 𝑥1 𝑥4 + 𝑥2 𝑥4 )+ 𝐹ˆ˙𝑓
−𝜆2 (𝑥4 −𝑥˙ 𝑑 )+ 𝑥 𝑑 + 𝑚
𝑥𝐴
𝑥𝐵
𝑚𝑒
𝑒
(
)
𝑘𝐵
𝐴𝑒 𝑘𝐴
−𝑚
𝑓
+
𝑓
12 𝑥
21
𝑥
(7.76)
[𝐴𝑒 (𝑥1 −𝑥2 )−𝐹ˆ𝑓 ]−¨𝑥𝑑
𝑒
𝐴
𝐵
2. Si 𝑆 > 0
𝐴𝑟5 (𝑢𝑒𝑞 ) =
−2𝜆
(
1
𝑚𝑒
[𝐴𝑒 (𝑥1 −𝑥2 )−𝐹ˆ𝑓 ]−¨𝑥𝑑
𝑒
142
𝐴
𝐵
Capítulo7. Control No-lineal para Posicionamiento del Servomecanismo Neumático
La ley de control equivalente 𝑢𝑒𝑞 queda establecida mediante:
⎧
𝑢(𝐴𝑟𝑠1 ) si 𝑆 < 0
⎨
𝑢𝑒𝑞 =
𝑢0
si 𝑆 = 0
⎩ 𝑢(𝐴 )
si 𝑆 > 0
𝑟5
y
𝑢 = 𝑢𝑒𝑞 − 𝑘sat(𝑆/Ψ)
Además, la ley de control se estabiliza en ambos controladores cuando la posición 𝑥3 entra en
un valor de tolerancia 𝑒𝑡𝑜𝑙 al rededor del valor de posición deseado 𝑥𝑑 , mediante la expresión:
⎧
⎨ 𝑢
si ∣𝑥3 − 𝑥𝑑 ∣ ≤ 𝑒𝑡𝑜𝑙
0
𝑢𝑒 =
(7.77)
⎩ 𝑢
si ∣𝑥 − 𝑥 ∣ > 𝑒
3
𝑑
𝑡𝑜𝑙
donde 𝑢𝑒 es la ley de control estabilizada.
7.5.
Resultados Teóricos y Experimentales
Los resultados teóricos de las simulaciones fueron obtenidos mediante MatlabⓇ . Los algoritmos para los controladores no-lineales mediante linealización por realimentación y por
modo deslizante fueron implementados en LabView
TM
. La tasa de muestreo utilizada en los
algoritmos de control fue de 1000 𝐻𝑧. Para la obtención de los datos teóricos y experimentales se utilizaron dos tipos de entradas deseadas: una cicloidal y otra senoidal. Tanto en
las simulaciones y en los resultados experimentales no se implementó carga externa en el
sistema.
7.5.1.
Trayectorias Deseadas
Las señales de entrada deseadas se describen a continuación:
1. Trayectoria cicloidal
⎧
)
( 0.63 )
(
sen(6.3𝑡)
+
𝑡
− 0.63
2
6.3
6.32
0.1
(
)
⎨ − 2.0 sen(6.3𝑡) + ( 2.0 ) 𝑡 − 0.8498
6.32
6.32
𝑥𝑑 (𝑡) =
0.4167
(
)
( 2.0 )
2.0
2 sen(6.3𝑡) − 6.32 𝑡 + 2.3167
6.3
⎩
0.1004
143
si
0<𝑡≤1
si
1<𝑡≤3
si
3<𝑡≤4
si
4<𝑡≤6
si
6<𝑡≤7
si
𝑡≥7
(7.78)
Capítulo7. Control No-lineal para Posicionamiento del Servomecanismo Neumático
donde 𝑥𝑑 está en 𝑚.
2. Trayectoria senoidal
𝑥𝑑 (𝑡) = 𝑥𝑑0 + 𝐴𝑖 sen(2𝜋𝑓𝑖 𝑡)
(7.79)
donde 𝐴𝑖 es la amplitud de la señal deseada y 𝑓𝑖 es la frecuencia de la señal deseada
y 𝑥𝑑0 es el corrimiento sobre el eje vertical. En primera instancia se toman 𝐴𝑖 = 0.1 𝑚,
𝑓𝑖 = 0.5 𝐻𝑧 y 𝑥𝑑0 = 0.25 𝑚
7.5.2.
Controlador PID con Compensación de Zona Muerta
Los resultados teóricos y experimentales de los controladores no-lineales de linealización
por realimentación y por modo deslizante se compararon frente al desempeño de un controlador PID con compensación de zona muerta determinada en el capitulo 5. La ley de control
para este controlador esta dada por:
∫
𝑡
𝑒 𝑑𝑡 − 𝑘𝑣
𝑢 = 𝑘𝑝 𝑒 + 𝑘𝑖
0
𝑑𝑥3
𝑑𝑡
(7.80)
donde 𝑒 = 𝑥𝑑 − 𝑥3 es el error de seguimiento, 𝑘𝑝 es la constante proporcional, 𝑘𝑖 es la constante integral y 𝑘𝑣 es la constante derivativa. La compensación de zona muerta para este
controlador fue implementada mediante:
⎧
𝑢
si
⎨ 𝑐0
𝑢𝑐 =
𝑢 + 𝑢𝑝 si
⎩ 𝑢+𝑢
si
𝑛
∣𝑒∣ ≤ 𝑒𝑡𝑜𝑙
ó
𝑢 = 𝑢0
∣𝑒∣ > 𝑒𝑡𝑜𝑙
y
𝑢 > 𝑢0
∣𝑒∣ > 𝑒𝑡𝑜𝑙
y
𝑢 < 𝑢0
(7.81)
donde 𝑢𝑐 es la ley de control compensada, 𝑢𝑐0 es el voltaje de equilibrio, 𝑢𝑐0 = 𝑢0 = 5.06 𝑉 ,
𝑢𝑝 es la diferencia de voltaje a la derecha de la zona muerta del sistema, 𝑢𝑝 = 0.277 𝑉 , 𝑢𝑛 es
la diferencia de voltaje a la izquierda de la zona muerta del sistema, 𝑢𝑛 = −0.317 𝑉 ,
7.5.3.
Resultados de las Simulaciones
Con el fin de obtener algunas curvas de respuestas frente a las trayectorias deseadas, los
valores de las constantes de los controladores se ajustaron manualmente procurando la mejor
respuesta teniendo en cuenta como criterio el equilibrio entre la precisión y la suavidad de
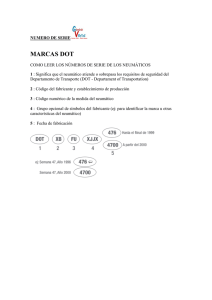
la respuesta. La figura 7.6 muestra la simulación de los controladores PID y mediante linealización por realimentación (LPR) frente a las trayectorias cicloidal y seno. Los parámetros de
144
Capítulo7. Control No-lineal para Posicionamiento del Servomecanismo Neumático
los controladores se muestran en la tabla 7.1. La tolerancia de error permitida es 𝑒𝑡𝑜𝑙 = 1 𝑚𝑚.
PID
LPR, ciclioide
LPR, seno
𝑘𝑝 , 𝑉 /𝑚
𝑘𝑖 , 𝑉 /𝑚.𝑠
𝑘𝑣 , 𝑉.𝑠/𝑚
20
10
0.05
𝑘0 , 𝑠−3
𝑘1 , 𝑠−2
𝑘2 , 𝑠−1
35 ×
105
8×
105
450
12 ×
105
3×
105
450
Cuadro 7.1: Ganancias para controladores PID y LPR utilizadas en la simulación
(a)
(b)
(c)
(d)
Figura 7.6: Resultados teóricos de los controladores PID y mediante linealización por realimentación para trayectorias cicloidal y senoidal. (a) y (c) Desplazamiento y error para
trayectoria cicloidal; (b) y (d) Desplazamiento y error para trayectoria seno.
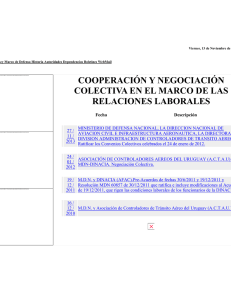
La figura 7.7 muestra la simulación de los controladores PID y por modo deslizante (MD)
145
Capítulo7. Control No-lineal para Posicionamiento del Servomecanismo Neumático
frente a las trayectoria cicloidal y senoidal. En la tabla 7.2 se muestran los parámetros utilizados en la simulación de éstos controladores.
PID
𝑘𝑝 , 𝑉 /𝑚
𝑘𝑖 , 𝑉 /𝑚.𝑠
𝑘𝑣 , 𝑉.𝑠/𝑚
20
10
0.05
𝜆, 𝑠−1
𝑘
Ψ
MD, ciclioide
150
40
1500
MD, seno
150
40
1500
Cuadro 7.2: Ganancias para controladores PID y MD utilizadas en la simulación
(a)
(b)
(c)
(d)
Figura 7.7: Resultados teóricos de los controladores PID y mediante linealización por realimentación para trayectorias cicloidal y senoidal. (a) y (c) Desplazamiento y error para
trayectoria cicloidal; (b) y (d) Desplazamiento y error para trayectoria seno.
Basándose en el error de seguimiento, es evidente que los controladores no-lineales presen146
Capítulo7. Control No-lineal para Posicionamiento del Servomecanismo Neumático
tan un mejor desempeño en relación al desempeño mostrado por el controlador PID.
7.5.4.
Resultados Experimentales
Los resultados experimentales presentaron una gran concordancia con los resultados
teóricos de acuerdo a varias pruebas preliminares. Sin embargo factores como el ruido eléctrico presente en alguna escala en las variables medidas y factores computacionales como el
tiempo de muestreo y la velocidad de ejecución de los algoritmos, alteran el comportamiento
de los controladores prácticos de tal forma que el aumento de los valores de los parámetros
de control con el fin de mejorar la precisión en la respuesta se ve limitado hasta cierto punto
por la presencia de inestabilidades.
En la figura 7.8 se muestra el desempeño real de los controladores PID y mediante linealización por realimentación para las trayectoria cicloidal y senoidal. Las ganancias de estos
controladores se muestran en la tabla 7.3. La tolerancia de error permitida es 𝑒𝑡𝑜𝑙 = 1 𝑚𝑚.
𝑘𝑝 , 𝑉 /𝑚
𝑘𝑖 , 𝑉 /𝑚.𝑠
𝑘𝑣 , 𝑉.𝑠/𝑚
20
10
0.05
PID
𝑠−3
𝑘0 ,
LPR, ciclioide
LPR, seno
𝑘1 ,
2 × 105
2×
𝑠−2
1 × 104
105
1.5 ×
104
𝑘2 , 𝑠−1
350
550
Cuadro 7.3: Ganancias para controladores PID y LPR utilizadas experimentalmente
La figura 7.9 muestra el desempeño real de los controladores PID y por modo deslizante
para las trayectorias cicloidal y senoidal. Las ganancias de los controladores se muestran en
la tabla 7.4.
𝑘𝑝 , 𝑉 /𝑚
𝑘𝑖 , 𝑉 /𝑚.𝑠
𝑘𝑣 , 𝑉.𝑠/𝑚
20
10
0.05
𝑘
Ψ
PID
𝜆,
𝑠−1
MD, ciclioide
120
10
7000
MD, seno
120
15
7000
Cuadro 7.4: Ganancias para controladores PID y MD utilizadas experimentalmente
Las figuras 7.8 y 7.9 muestran que experimentalmente los controladores no-lineales tienen
un mejor desempeño en relación al controlador PID. Sin embargo, el controlador por modo
deslizante tuvo un desempeño más bajo frente a los resultados obtenidos mediante simulación, debido a que este controlador presentó más inestabilidad al aumentar las ganancias
147
Capítulo7. Control No-lineal para Posicionamiento del Servomecanismo Neumático
(a)
(b)
(c)
(d)
Figura 7.8: Resultados experimentales de los controladores PID y mediante linealización por
realimentación para trayectorias cicloidal y senoidal. (a) y (c) Desplazamiento y error para
trayectoria cicloidal; (b) y (d) Desplazamiento y error para trayectoria seno.
de control.
En las tablas 7.5, 7.6 y 7.7 se muestra el comportamiento del error promedio de seguimiento
para las trayectorias cicloidal y senoidal, respectivamente. El error de seguimiento se estimó
mediante:
v
u 𝑛
u1 ∑
𝑒2𝑖
𝑒𝑠 = ⎷
𝑛
(7.82)
𝑖=1
donde 𝑛 es el numero de datos de una muestra y 𝑒𝑖 = 𝑥3𝑖 − 𝑥𝑑𝑖 , 𝑖 = 1, ⋅ ⋅ ⋅ , 𝑛.
La tabla 7.5 muestra un mejor comportamiento de los controladores no-lineales con respecto
al controlador PID frente a la señal cicloidal. Además, es evidente que el controlador medi148
Capítulo7. Control No-lineal para Posicionamiento del Servomecanismo Neumático
(a)
(b)
(c)
(d)
Figura 7.9: Resultados experimentales de los controladores PID y mediante linealización por
realimentación para trayectorias cicloidal y senoidal. (a) y (c) Desplazamiento y error para
trayectoria cicloidal; (b) y (d) Desplazamiento y error para trayectoria seno.
Test 1
Test 2
Test 3
Test 4
Test 5
ēs
PID
10.00
10.30
10.52
10.06
10.14
10.20
LPR
5.34
3.26
3.17
3.33
3.34
3.68
MD
6.68
7.07
6.87
7.18
6.89
6.94
Cuadro 7.5: Error de seguimiento promedio ēs en 𝑚𝑚, estimado para la trayectoria cicloidal
ante linealización por realimentación presenta un mejor desempeño que el controlador por
modo deslizante.
De acuerdo con las tablas 7.6 y 7.7, el error de seguimiento aumenta en la medida que aumenta la frecuencia de la señal de entrada senoidal. También se muestra que el controlador
149
Capítulo7. Control No-lineal para Posicionamiento del Servomecanismo Neumático
Test 1
Test 2
Test 3
Test 4
Test 5
ēs
PID
15.76
15.43
15.41
15.44
15.46
15.50
LPR
2.95
3.51
3.30
2.89
3.50
3.23
MD
5.46
6.45
5.62
5.87
6.15
5.91
Cuadro 7.6: Error de seguimiento promedio ēs en 𝑚𝑚, estimado para la trayectoria senoidal,
𝑓𝑖 = 0.5 𝐻𝑧
Test 1
Test 2
Test 3
Test 4
Test 5
ēs
PID
24.54
24.92
24.40
24.52
24.58
24.59
LPR
6.31
6.88
5.78
5.81
6.38
6.23
MD
10.34
10.30
10.78
11.2
10.38
10.60
Cuadro 7.7: Error de seguimiento promedio ēs en 𝑚𝑚, estimado para la trayectoria senoidal,
𝑓𝑖 = 1.0 𝐻𝑧
mediante linealización por realimentación mantiene un mejor desempeño dinámico frente a
los controladores PID y por modo deslizante.
7.6.
Resumen
En este capítulo se presentó el diseño e implementación de dos controladores no-lineales
basado en las teorías de control no-lineal mediante linealización por realimentación y por
modo deslizante. Las simulaciones de estos controladores presentaron un desempeño teórico que supera en gran medida al desempeño de un controlador PID. Las simulaciones demostraron que el desempeño del los controladores no-lineales mejora al aumentar las ganancias hasta cierto grado, manteniendo el equilibrio entre precisión y suavidad en la respuesta,
de esta manera se logró reducir en gran medida el error de seguimiento.
Los resultados experimentales de los controladores no-lineales demostraron que factores
como la incertidumbre paramétrica del modelo matemático del servomecanismo neumático, el ruido eléctrico en las señales medidas y factores computacionales, deterioran su desempeño, tornándose inestables. Por lo tanto, no se logró obtener los errores de seguimiento
conseguidos mediante simulación. Los errores de seguimiento experimentales obtenidos con
los controladores no-lineales en el servomecanismo neumático, si bien no son muy bajos, se
encuentran dentro de valores obtenidos en trabajos anteriores [20, 65].
150
Capítulo 8
Conclusiones
E
L TRABAJO DE T ESIS presentó a lo largo de su desarrollo unos resultados satisfactorios
de acuerdo con los objetivos planteados en un principio.
En el desarrollo del modelo matemático del sistema, uno de los aspectos más importantes
fue el modelado de la válvula proporcional. En este modelo se despreció la dinámica de la
corredera de la válvula, puesto que su aporte a la dinámica del servosistema no es significativo. De esta manera, el modelo estático resultante se redujo a las ecuaciones de flujo de masa
a través de sus puertos de trabajo 2 y 4, basadas en el modelo establecido por la norma ISO
6358. El concepto de área relativa es de gran importancia ya que al incluirlo en el modelo de
la norma ISO 6358, permite establecer la razón de flujo de masa a través de los puertos de
trabajo de la válvula en función del voltaje aplicado 𝑢.
El flujo de masa de aire a través de las mangueras y cámaras del cilindro fue modelado
considerando uniforme el estado del aire y despreciando las pérdidas de presión por fricción.
Este hecho permitió obtener los modelos matemáticos para la variación de la presión en los
volúmenes de control A y B del servosistema.
La fricción en el cilindro neumático fue modelada mediante la ecuación de LuGre. Muchos trabajos de investigación corroboran los méritos de este modelo en aplicaciones relacionadas con servosistemas neumáticos [16, 20, 29, 36, 54]. Además, los parámetros del modelo de LuGre pueden ser obtenidos por técnicas experimentales sencillas.
La representación del modelo matemático del servosistema neumático permite con mayor facilidad el análisis de su dinámica no-lineal, a su vez, facilita el diseño de una estrategia
de control basada en la teoría de control no-lineal.
151
Capítulo8. Conclusiones
En la caracterización del servosistema neumático, es de destacar que la válvula proporcional al manejar un caudal alto, obstaculiza enormemente la realización de pruebas experimentales en estado estacionario, las cuales se trataron de realizar en un principio, de tal
forma que se debió descartar su realización, además, estas pruebas requieren de una instrumentación precisa y por tanto costosa, con la que no se no se contaba en el laboratorio. Afortunadamente, el empleo de pruebas experimentales en estado transitorio, facilitó en gran
medida la estimación de las características estáticas de la válvula proporcional a un bajo
costo y fácil realización.
Un aporte importante en la caracterización del área relativa y las relaciones de flujo de
masa, fue el empleo de la técnica de optimización no-lineal de mínimos cuadrados. Esta
técnica mejoró la precisión y redujo el tiempo de cómputo en comparación con trabajos anteriores donde los parámetros fueron estimados mediante la técnica de ensayo y error.
Se comprobó a partir de las pruebas experimentales en estado transitorio que el área
relativa y las relaciones de flujo de masa están directamente relacionadas con el el comportamiento dinámico de la presión dentro del tanque de pruebas. El estado estacionario de la
presión en el tanque de pruebas depende únicamente de las relaciones de flujo de masa.
Los parámetros de la fricción en el cilindro neumático fueron estimados de acuerdo al
modelo de LuGre. La fuerza de Coulomb, la fuerza de fricción estática, el coeficiente de fricción viscosa y la velocidad de Stribeck se obtuvieron a partir del mapa de fricción fuerza vs.
velocidad en estado estacionario y para ello se recurrió a la técnica de optimización no-lineal
de mínimos cuadrados. La rigidez y el coeficiente de fricción seca se estimaron por medio de
técnicas lineales aproximadas y simulación numérica. Todos estos parámetros corresponden
a valores promedio y se consideran uniformes a lo largo del recorrido del cilindro, además,
se encuentran acordes a valores determinados en otros trabajos.
La validación del modelo estático de la válvula proporcional presentó una buena correspondencia frente a los resultados experimentales de la función presión-señal. La validación
del modelo dinámico del servosistema presentó una buena correspondencia con los resultados experimentales frente a las entradas paso, rampa y seno. Además, se comprobó que
la imprecisión del modelo se debe principalmente a la incertidumbre paramétrica entre los
parámetros reales de fricción que varían con el desplazamiento del émbolo y los parámetros
de fricción estimados que son valores promedio y además uniformes.
A partir del análisis de la dinámica no-lineal en lazo abierto, y teniendo en cuenta que
152
Capítulo8. Conclusiones
no existen teoremas generales que traten el estudio de subespacios de equilibrio, mediante
el cálculo numérico se pudo establecer en la condición de pre-deslizamiento (émbolo estacionario), un subespacio de equilibrio unidimensional, el cual es asintóticamente estable si
∣𝑥𝑒𝑞
5 ∣≤
𝐹𝑠
𝜎0 .
Fuera de esta condición el equilibrio es inestable. Además, el sistema presenta un
comportamiento con velocidad uniforme si 𝐹𝑐 ≤ 𝐴𝑒 (𝑥1 − 𝑥2 ) < 𝐹𝑠 , y un comportamiento oscilatorio de carácter caótico que aparece cuando se encuentra en la transición entre el estado
de equilibrio pre-deslizamiento y cuando se desplaza a velocidad uniforme.
Con respecto al control no-lineal de posición, se logró diseñar a partir del modelo matemático del servosistema dos estrategias de control, la primera mediante linealización por realimentación y la segunda por modo deslizante.
Es importante destacar que para la deducción de la ley de control, el modelo de fricción
presentó dificultades a la hora de implementar el observador de estado para la variable 𝑥5 ,
ya que los algoritmos se tornaron inestables. Lo anterior condujo a simplificar el modelo de
fricción y obtener un valor estimado 𝑥
ˆ5 independiente del tiempo. De esta manera la fuerza
de fricción estimada 𝐹ˆ𝑓 quedó dependiendo de la aceleración 𝑥˙ 4 del sistema, la cual se sensó
directamente con un acelerómetro.
A partir de las simulaciones, se pudo comprobar que el desempeño dinámico de los controladores no-lineales mediante linealización por realimentación y por modo deslizante, es
mucho mejor que el desempeño del controlador PID con compensación de zona muerta.
Los resultados experimentales comprobaron que se mantiene la hegemonía del desempeño de los controladores no-lineales sobre el desempeño del controlador PID. Sin embargo,
el desempeño real de los controladores no-lineales disminuyó con respecto a los resultados
de las simulaciones. Esto debido a factores como el ruido eléctrico en la medida de las variables, las incertidumbre paramétrica del modelo y factores computacionales como el tiempo
de muestreo y la rapidez de ejecución de los algoritmos, entre otros, que volvieron los controladores inestables para cierto valor de las ganancias.
Otro factor de importancia en el desempeño experimental de los controladores no-lineales
está relacionado con el diseño de la válvula proporcional. La válvula en estudio maneja un alto caudal y por consiguiente tiene una alta sensibilidad. Por estas características, esta válvula se encuentra sobredimensionada para los requerimientos de caudal y presión del cilindro
neumático, ya que este posee una capacidad volumétrica muy pequeña. De esta manera el
control de la válvula se hace un tanto difícil, sobre todo en su posición media, causando
153
Capítulo8. Conclusiones
inestabilidades como el fenómeno “hunting” que contribuyen al deterioro del desempeño
experimental de los controladores no-lineales.
Debido a los factores anteriormente mencionados, el error de seguimiento experimental
en los controladores no-lineales se vio afectado en gran medida con respecto a los valores
observados en las simulaciones. El error de seguimiento experimentales obtenidos con los
controladores no-lineales es ±10 𝑚𝑚, valor que está cercano a valores obtenidos en trabajos
anteriores.
Teniendo en cuenta los factores que disminuyen el desempeño de los controladores nolineales, este puede ser mejorado mediante:
† La eliminación del ruido eléctrico mediante la construcción adecuada del driver teniendo en cuenta el respectivo blindaje.
† La implementación de los controladores mediante un microcontrolador, con esto se
reduce en gran medida los retardos computacionales y de muestreo de señales, en este
caso el PC solamente se encargaría de monitorear las señales del servosistema sin que
entre a formar parte del lazo de control.
† Selección adecuada de la válvula neumática en cuanto a su tamaño con el fin de que logre un accionamiento adecuado del cilindro en el tiempo. Para esto es muy importante
el cálculo previo de la capacidad de caudal representada en el parámetro 𝑐𝑣 [77].
Como trabajo futuro a realizar están los siguientes aspectos:
† Identificación de bifurcaciones en lazo abierto utilizando otro método analítico.
† Análisis de la dinámica no-lineal del servosistema neumático en lazo cerrado, encaminado a la determinación de ciclos límites y la caracterización de posibles bifurcaciones.
Este análisis se trató en un principio de realizar, pero no se llevó a término por que se
presentaron inconsistencias en los algoritmos implementados.
† Mejoramiento de los controladores no-lineales en lo relacionado con la estimación de la
fricción mediante observadores de estado estables que permitan un mejor desempeño
dinámico, inclusive, frente a diferentes solicitudes de carga externa en el servosistema
neumático. En este aspecto lo primero que se debe hacer es la correcta selección de la
154
Capítulo8. Conclusiones
válvula proporcional se acuerdo a los requerimientos de consumo de aire y carga en el
cilindro neumático.
155
Apéndice A
Programa para Cálculo de Áreas
relativas y relaciones de flujo de masa
mediante Optimización No-lineal de
Mínimos Cuadrados
La obtención de parámetros de área relativa y relaciones de flujo de masa se obtuvo mediante la utilización de la función lsqcurvefit de Matlab, la cual realiza los ajustes de curvas
no-lineales por mínimos cuadrados. Dado un conjunto de datos de entrada xdata(tiempo) y
un conjunto de datos observados ydata(Presión), se determinan los coeficientes x(Ar, alfa)
que mejor ajustan la función f(x, xdata).
La función fpfit.m se describe a continuación:
156
ApéndiceA. Programa para Cálculo de Áreas relativas y relaciones de flujo de masa
mediante Optimización No-lineal de Mínimos Cuadrados
%--------* Cálculo Area realtiva y reacion de flujo de masa *------------function[x,error] = fpfit(Pa,Pb,t1,Aro,alfao)
xdata=t1;
ydata=Pb;
xo = [Aro alfao];
%options=optimset('tolfun',0.001);
%[x,resnorm] = lsqcurvefit(@func_1,xo,xdata,ydata,[],[],options);
[x,resnorm] = lsqcurvefit(@func_1,xo,xdata,ydata);
error=sqrt(resnorm/length(xdata))/1e5;
% ---------*** Parametros del Servomecanismo ***--------% -----------** Constantes de aire ** ------------------% ---------* Condiciones Estándar *-------R=287; % N-m/kg-K Constante del aire
Tn=20+273.15; % K, Según Norma ISO 6358
Pn=1e5; % Pa abs
denn=Pn/(R*Tn); % kg/m3
k=1.4;
% -------* Condiciones Locales (Manizales) *--------Po=79700; % Pa abs Presion atmosferica en Manizales
To=22+273; % K Temp. aire ambiente
% -------* Condiciones de suministro *---------Ps=5.0e5+Po; % Pa abs
Ts=To; % K, Temp. aire de suministro
dens=Ps/(R*Ts); % kg/m3
% ------------** Parámetros de entrada **----------fex=1;
wex=2*pi*fex; % rad/s Frecuencia de excitación
ml=0; % kg masa de carga
% ----------** Parámetros del Sistema **----------Pao=Po; % presion inicial de la camara A
Pbo=Po; % Preson inicial de la camara B
n=1.0;% Const. politropica
Tao=To;
Tbo=To;
Lm1=0.635; % m longitud de la manguera 1
Lm2=0.635; % m longitud de la manguera 2
Dim=4/1000; % m diametro interno de las mangueras
Vm1=pi*Dim^2/4*Lm1; % m3 vol. de la manguera 1
Vm2=pi*Dim^2/4*Lm2; % m3 vol. de la manguera 2
Dc=11.14/1000;% % m, diametro del piston de la valvula
Db=6.28/1000; % m, diametro de la viela de la valvula
Lv=13.95/1000;%14.6/1000; % m, long. camara de la vavula
Vv=pi/4*(Dc^2-Db^2)*Lv;% m3 Vol. camara de la valvula
%Vt=11.7/1000;
Vt=1.554/1000;% Vol. del tanque en m3
%Vt=5/1000;
% -------------** Parámetros de la válvula **-------------C=3.1/(1e8); % m3/s-Pa
b=0.26;
phimax=0.4842;
Aro=x(1);
alfa=x(2);
beta=1-alfa;
%---------------** Condiciones inicilaes **---------------xo=[Po];
options = odeset('RelTol',1e-6, 'Abstol',1e-7);
[t,y]=ode45(@f,[0 t1(length(t1))],xo,options);
P=(y(:,1)-Po)/1000;
157
ApéndiceA. Programa para Cálculo de Áreas relativas y relaciones de flujo de masa
mediante Optimización No-lineal de Mínimos Cuadrados
for j=1:length(t)
if t(j)<=0
Ps1(j)=(Ps-Po)/1000;
else
Ps1(j)=(Ps-Po)/1000;
end
end
%plot(xdata,Pa,xdata,Pb,t,P,t,Ps1);grid
plot(xdata,(Pb+79.7)/100,'-',t,(P+79.7)/100,'--','linewidth',1.5);grid; axis([0 max(t1) 0 6])
set(gca,'fontsize',20,'fontangle','Normal','fontname','times');
legend('\slP_t exp.','\slP_t sim.','location','best');
%legend('boxoff')
xlabel('\fontname{times}\sl{t, s}','fontsize',24);
ylabel('\fontname{times}\sl{P_t, bar}','fontsize',24);
text(80,3,'\fontname{times}\slAr_{2d}=0.028','fontsize',18);
text(80,2.6,'\fontname{times}\sl\alpha_{2d}=0.62','fontsize',18);
text(80,2.1,'\fontname{times}\sl\beta_{2d}=0.38','fontsize',18);
%axis([0 20 0 550])
set(findobj(gca,'Type','line','color','b'),'color','k')
%set(findobj(gca,'Type','line','color',[0 0.5 0]),'color',[.87 0.49 0])
set(findobj(gca,'Type','line','color',[0 0.5 0]),'color','b')
function flujo=fflujo1(Ar,Pu,Pd,Tu,deno,C,To,b)
rp=Pd/Pu;
if rp <= b
flujo=Ar*C*Pu*deno*sqrt(To/Tu);
elseif rp>b & rp <0.999
flujo=Ar*C*Pu*deno*sqrt(To/Tu)*((sqrt(1-((rp-b)/(1-b))^2)));
else
flujo=1000*Ar*C*deno*sqrt(1-((0.999-b)/(1-b))^2)*Pu*(1-rp)*sqrt(To/Tu);
end
end
function flujo=fflujo2(Ar,Pu,Pd,Tu,deno,C,To,b)
rp=Pd/Pu;
if rp <= b
flujo=Ar*C*Pu*deno*sqrt(To/Tu);
else
flujo=Ar*C*Pu*deno*sqrt(To/Tu)*real((sqrt(1-((rp-b)/(1-b))^2)));
end
end
function xdot =f(t,x)
if t<=1.02
Ar=0;
Ars1=Ar*alfa;
Ar5=Ar*beta;
else
Ar=Aro;
Ars1=Ar*alfa;
Ar5=Ar*beta;
end
T=To*(x(1)/Po)^((n-1)/n);
% T=To*(x(1)/Ps)^((n-1)/n);
T1=T-273;
flujo1=fflujo1(Ars1,Ps,x(1),Ts,denn,C,To,b);
flujo2=fflujo1(Ar5,x(1),Po,T,denn,C,To,b);
% flujo1=fflujo1(Ps,x(1),k,Ts,T,Ar,1,rpc,c1,c2);
xdot=[n*R*T/(Vv+Vm1+Vt)*(flujo1-flujo2)];
end
[Aro alfa beta T1]
end
158
ApéndiceA. Programa para Cálculo de Áreas relativas y relaciones de flujo de masa
mediante Optimización No-lineal de Mínimos Cuadrados
function F = func_1(x,xdata)
%clc
% ---------------------------*** Parametros del Servomecanismo ***----------------------% -----------** Constantes de aire ** ------------------% ---------* Condiciones Estándar *-------R=287; % N-m/kg-K Constante del aire
Tn=20+273.15; % K, Según Norma ISO 6358
Pn=1e5; % Pa abs
denn=Pn/(R*Tn); % kg/m3
k=1.4;
% -------* Condiciones Locales (Manizales) *--------Po=79700; % Pa abs Presion atmosferica en Manizales
To=22+273; % K Temp. aire ambiente
% -------* Condiciones de suministro *---------Ps=5.0e5+Po; % Pa abs
Ts=To; % K, Temp. aire de suministro
dens=Ps/(R*Ts); % kg/m3
% ------------** Parámetros de entrada **----------fex=1;
wex=2*pi*fex; % rad/s Frecuencia de excitación
ml=0; % kg masa de carga
% ----------** Parámetros del Cilindro **----------Pao=Po; % presion inicial de la camara A
Pbo=Po; % Preson inicial de la camara B
n=1.0;% Const. politropica
Tao=To;
Tbo=To;
xar=2e-3; % m Desplazamiento remanente equivalente de la camara A
xbr=0.03024;%; % m Desplazamiento remanente equvalente de la camara B
%Vt=5/1000;
%Vt=11.7/1000;
Vt=1.554/1000;% Vol. del tanque en m3
% % -----------* Parámetros de Fuerza de impacto *----------% -------------** Parámetros de la válvula **-------------C=3.1/(1e8); % m3/s-Pa
b=0.26;
phimax=0.4842;
beta=1-x(2);
tf=xdata(length(xdata));
zo=[Po];
options = odeset('RelTol',1e-6, 'Abstol',1e-7);
[t,y]=ode45(@f,[0 tf],zo,options);
F=(spline(t,y(:,1),xdata)-Po)/1000;
function flujo=fflujo1(Ar,Pu,Pd,Tu,deno,C,To,b)
rp=Pd/Pu;
if rp <= b
flujo=Ar*C*Pu*deno*sqrt(To/Tu);
elseif rp>b & rp <0.999
flujo=Ar*C*Pu*deno*sqrt(To/Tu)*((sqrt(1-((rp-b)/(1-b))^2)));
else
flujo=1000*Ar*C*deno*sqrt(1-((0.999-b)/(1-b))^2)*Pu*(1-rp)*sqrt(To/Tu);
end
end
function flujo=fflujo2(Ar,Pu,Pd,Tu,deno,C,To,b)
rp=Pd/Pu;
if rp <= b
flujo=Ar*C*Pu*deno*sqrt(To/Tu);
else
159
ApéndiceA. Programa para Cálculo de Áreas relativas y relaciones de flujo de masa
mediante Optimización No-lineal de Mínimos Cuadrados
flujo=Ar*C*Pu*deno*sqrt(To/Tu)*real((sqrt(1-((rp-b)/(1-b))^2)));
end
end
function zdot =f(t,z)
if t<=1.02
Ars1=0;
Ar5=0;
else
Ars1=x(1)*x(2);
Ar5=x(1)*beta;
end
T=To*(x(1)/Po)^((n-1)/n);
%T=To*(z(1)/Ps)^((n-1)/n);
T1=T-273;
flujo1=fflujo1(Ars1,Ps,z(1),Ts,denn,C,To,b);
flujo2=fflujo1(Ar5,z(1),Po,T,denn,C,To,b);
zdot=[n*R*T/Vt*(flujo1-flujo2)];
end
end
160
Apéndice B
Programa para Cálculo de Parámetros
de Fricción mediante optimización
no-lineal de Mínimos Cuadrados
161
ApéndiceB. Programa para Cálculo de Parámetros de Fricción mediante optimización
no-lineal de Mínimos Cuadrados
clc
clear
% Datos para velocidad positiva
Fsp=[65.7 65.2 67.7 67.6 67.1 66.8 70.3 70.2 71.9 75.1 76.2 75.3 81.1 81.3 83.8 83.6];
Fssp=[46.4 46.6 47.0 47.3 47.7 49.3 49.1 49.7 49.9 51.4 52.0 53.3 54.9 56.9 58.1 60.2 ];
vssp=[2.12 2.32 2.66 3.05 3.42 3.89 4.29 4.93 5.44 6.79 8.37 10.25 12.76 15.31 18.16 20.70]/100;
% Datos para velocidad negativa
Fsn=[-61.1 -62.3 -62.0 -61.8 -62.9 -62.3 -63.8 -62.8 -63.0 -63.4 -61.8 -63.2 -62.4 -58.1];
Fssn=[-46.1 -46.6 -46.0 -46.2 -47.9 -47.7 -47.9 -48.5 -49.7 -51.3 -52.3 -54.9 -46.1 -46.0];
vssn=[-3.16 -3.52 -4.25 -4.81 -5.21 -6.17 -7.90 -9.35 -11.6 -13.8 -16.7 -19.1 -2.71 -2.33]/100;
%Ae=pi*(25e-3)^2/4;
Fsp=mean(Fsp)
sFsp=std(Fsp)
Fsn=mean(Fsn)
sFsn=std(Fsn)
Fssp=[Fsp Fssp];
vssp=[0 vssp];
Fssn=[Fsn Fssn];
vssn=[0 vssn];
xdata=vssp;
ydata=Fssp;
x0 = [50 70 70 0.005];
options=optimset('tolfun',1e-3,'tolx',1e-4);
[x,resnorm1,r1,e1] = lsqcurvefit(@myfun,x0,xdata,ydata,[],[],options);
%[x,resnorm] = lsqcurvefit(@myfun,x0,xdata,ydata)
error1=sqrt(resnorm1/length(xdata))
x1=linspace(0,.25,200);
x(4)=0.0105
y1=x(1)+(x(2)-x(1))*exp(-(x1./x(4)).^2)+x(3)*x1;
xdata=vssn;
ydata=Fssn;
x0 = [-50 -60 40 0.05];
[x,resnorm2,r2,e2] = lsqcurvefit(@myfun,x0,xdata,ydata);
error2=sqrt(resnorm2/length(xdata))
x2=linspace(-.25,0,200);
y2=x(1)+(x(2)-x(1))*exp(-(x2./x(4)).^2)+x(3)*x2;
plot(vssp,Fssp,'s',x1,y1,'b','linewidth',1.5,...
'MarkerEdgeColor','k',...
'MarkerFaceColor','y',...
'MarkerSize',10);
hold on
plot(vssn,Fssn,'s',x2,y2,'r','linewidth',1.5,...
'MarkerEdgeColor','k',...
'MarkerFaceColor','g',...
'MarkerSize',10);grid
axis([-.3 .3 -80 80])
legend('\slF_{ssp} exp.','\slF_{ssp} ajuste','\slF_{ssn} exp.','\slF_{ssn} ajuste')
set(gca,'fontname','times','fontsize',18);
xlabel('\fontname{times}\slv_{ss}, m/s','fontsize',23);
ylabel('\fontname{times}\slF_{ss}, N','fontsize',23);
% set(findobj(gca,'type','line','color','r'),'color','k')
% set(findobj(gca,'type','line','color',[0
162 .75 0.75]),'color',[.39 .47 .64])
hold off
Pp=polyfit(vssp(2:length(vssp)),Fssp(2:length(vssp)),1)
Pn=polyfit(vssn(2:length(vssn)),Fssn(2:length(vssn)),1)
Bibliografía
[1] J. F. Blackburn, Gerhard Reethof, and Shearer Lowen. Fluid Power Control. M.I.T Press,
1960.
[2] D. McCloy and H. R. Martin. Control of Fluid Power: Analisis and Control. John Wiley,
1980.
[3] John Watton. Fluid Power Systems: Simulation, Analog and Microcomputer Control. Prentice
Hall, 1980.
[4] Frank Yeaple. Fluid Power Design Handbook. Marcel Dekker, Inc, third edition, 1996.
[5] H. E. Merrit. Hydraulic Control Systems. John Wiley Sons, inc, 1967.
[6] John S. Cundiff. Fluid Power Circuits and Controls; Funadamentals and Applications. CRC
Press, 2002.
[7] P. Beater. Pneumatic Drives, System Design, Modelling and Control. Springer-Verlag Berlin
Heidelberg 2007, 2007.
[8] J.L. Shearer. Study of Pneumatic Processes in the Continuous Control of Motion With Compressed Air, Parts I and II. Trans. of the ASME, 1956.
[9] Németh Huba. Nonlinear Modeling and Control for a Mechatronic Protection Valve. PhD
thesis, Budapest University of Technology and Economics, Faculty of Transportation
Engineering, Vehicles and Mobile Machines Ph.D. School, 2004.
[10] Olaby Osama, Brun Xavier, Sesmat Sylvie, Redarce Tanneguy, and Bideaux Eric. Characterization And Modeling of a Proportional Valve for Control Synthesis. 6th JFPS International
Symposium on Fluid Power, Tsukuba, pages 771–776, Nov. 2005.
163
BIBLIOGRAFÍA
[11] M. Sorli, G. Figliolini, and S. Pastorelli. Dynamic Model of a Pneumatic Proportional Pressure Valve. 2001 IEEE/ASME International Conference on advanced Intelligent Mechatronics
Procedings, pages 630–635, July 2001.
[12] Randy Anderson and P. Y. Li. Mathematical Modeling of two Spool Flow Control Servolvalve
Using a Pressure Control Pilot. Journal of Dynamic Systems, Measurement, and Control,
124:420–427, Sept. 2002.
[13] J. Falcao and F. Gomes. Modeling Pneumatic Servovalves using Neural Networks. 2006 IEEE
Conference on Computer Aided Control Systems Design, Oct. 2006.
[14] Jhon Berninger. Comparing ISO Sonic Flow to ANSI 𝐶𝑣 in Pneumatic Directional Control
Valves. National Fluid Power Association, pages 153–160, March 2002.
[15] E. C. Macia, J. X. Valls, horn, and G. Miller. Determination of Flow Rate Characteristics of
Pneumatic Power Valves. International Fluid Power Exposition and Technical Conference.
[16] Agnelo Denis Vieira.
Análise Teórico Experimental de Servoposicionadores Lineares
Pneumáticos. Master’s thesis, Universisdade Federal de Santa Catarina, Curso De PósGraduação Em Engenharia Mecânica, 1998.
[17] Bashir Nouri, Farid Al-Bender, Jan Swevers, Paul Vanherck, and Hendrick VanBrussel.
Modeling a Pneumatic Servo Positioning System With Friction. American Control Conference,
pages 1067–1071, June 2000.
[18] Edmond Richer and Yildirim Hurmuzlu. A High Performance Pneumatic Force Actuator
System Part 1 - Nonlinear Mathematical Model. ASME Journal of Dynamics Systems Measurement and Control, 122, No.3:416–425, Sept. 2000.
[19] Shu Ning and G. M. Bone. Development of Nonlinear Dynamic Model for a Servo Pneumatic
Positioning System. IEEE International Conference on Mechatronics and Automation, 1:43–48,
July 2005.
[20] Eduardo André Perondi.
Controle Não-linear em Cascata de um Servoposicionador
Pneumático com Compensação do Atrito. PhD thesis, Universisdade Federal de Santa Catarina, Curso De Pós-Graduação Em Engenharia Mecânica, 2002.
164
BIBLIOGRAFÍA
[21] Edmond Richer and Yildirim Hurmuzlu. A High Performance Pneumatic Force Actuator
System Part 2 - Nonlinear Controller Design. ASME Journal of Dynamics Systems Measurement and Control, 122, No.3:426–434, Sept. 2000.
[22] G. M. Bone and Shu Ning. Experimental Comparison of two Pneumatic Servo Positioning
Control Algotithms. IEEE International Conference on Mechatronics and Automation, 1:37–42,
July 2005.
[23] Zhihong Rao and G. M. Bone. Modeling and control of a miniature servo pneumatic actuator.
IEEE International Conference on Robotics and Automation, 1:37–42, July 2005.
[24] Zhihong Rao and Gary M. Bone. Nonlinear Modeling and Control of Servo Pneumatic Actuators. IEEE Transactions on Control Systems National Fluid Power Association, 16:562–569,
May 2008.
[25] Shu Ning and G. M. Bone. High Steady-State Accuracy Pneumatic Servo Positioning System
with PVA/PV Control and Friction Compensation. IEEE International Conference on Mechatronics and Automation, vol. 3:2824–2829, May 2002.
[26] A. Hildebrant, A. Kharitonov, O. Sawodny, M. Göttert, and A. Hartmann. On Zero Dynamics of Servo Pneumatic Actuators and its Usage for Trajectory Planning and Control. IEEE
International Conference on Mechatronics & Automation, pages 1241–1246, July 2005.
[27] Alexander Hildebrandt, Rüdiger Neumann, and Oliver Sawodny. Optimal System Design of SISO-Servopneumatic Positioning Drives. IEEE International Conference on Mechatronics & Automation, Jan. 2010.
[28] Lu Lu, Bin Yao, Qingfeng Wang, and Zheng Chen. Adaptive Robust Control of Linear Motor Systems with Dynamic Friction Compensation Using Modified LuGre Model. IEEE/ASME
International Conference on Advanced Intelligent Mechatronics, pages 961–966, July 2008.
[29] C. Canudas de Wit, H. Olsson, and K. J. Åström. A New Model for Control of Systems with
Friction. IEEE/ASME Transactions on Automatic Control, 40:419–425, March 1995.
[30] Y. Zhang, G. Liu, and A. A. Goldenberg. Friction Compensation with Estimated Velocity.
International Conference on Robotics & Automation, pages 2650–2655, May 2002.
165
BIBLIOGRAFÍA
[31] J. Han, Y. Sun, and Y. Wnag. Parameter Identification of LuGre Tire Model for the Simplified
Motion Dynamics of a Quarter-vehicle Model Based on Ant Colony Algorithm. IEEE Conference on Automation and Logistics, pages 3039–3043, Aug. 2007.
[32] G. Carducci, N.I Giannoccaro, A. Messina, and G. Rollo. Idebtification of viscous friction
coeficients for a pneumatic system using optimmization methods. Mathematics and Computers
in Simulation, pages 385–394, 2006.
[33] R. Kelly and J. Llamas. Determination of viscous and Coulomb friction by using velocity responses to torque ramp inputs. IEEE International Conference on Mechatronics & Automation.
[34] M. S. Mady, K. Khayati, and P. Bigras. Parameter Estimation for the LuGre Friction Model
Using Interval Analysis and Set Inversion. IEEE International Conference on Systems, Man
and Cybernetics, pages 428–433, 2004.
[35] Henrick Olsson. Control Systems with Friction. PhD thesis, Lund Institute of Technology,
1996.
[36] P. Lischinsky, C. Canudas de Wit, and G. Morel. Friction Compensation for an Industrial
Hydraulic Robot. IEEE Control Systems, pages 25–32, Feb. 1999.
[37] Lörinc Márton and Béla Lantos. Modeling, Identification, and Compensation of Stick-Slip
Friction. IEEE Transaction on Industrial Electronics, 54(1):511–521, 2007.
[38] Lörinc Márton. On analysis of limit cycles in positioning systems near Striebeck velocities.
Mechatronics, 18(1):46–52, 2008.
[39] R. H. A. Hensen, M. J. G. van de Molengraft, and M. Steinbuch. Frequency Domain
Identification of Dynamic Friction Model Parameters. IEEE transaction of control systems,
pages 191–195, March 2002.
[40] Kosaki Takahiro and Sano Manabu. An Analytical and Experimental Study of Chaotic Oscillation in a Pneumatic Cylinder. 1st FPNI-PhD Symp., Hamburg, pages 303–310, Nov.
2000.
[41] W. Yaunjay, H. Jianxie, Z. Yazhua, and Z. Fengkun. Analysis and Quenching of Limit
Cycles of Electro-Hydraulic Servovalve Control Systems with Friction and Interval Transport
Lag. 27𝑡ℎ Chinese Control Conference, pages 212–216, July 2008.
166
BIBLIOGRAFÍA
[42] B. L. Shields, K. B. Fite, and M. Goldferb. Design, Control, and Energetic Characterization of a Solenoid Injected Monopropellant Powered Actuator. IEEE/ASME Transactions on
Mechatronics, 11:477–487, Aug. 2006.
[43] J.P Hasebrink and R. Kobler. Introducción a la Técnica de Mando Neumático. Festo Didactic
SL., 1992.
[44] Festo AG & Co. Programa de fabricación, volume 1 y 2. Festo, 2003.
[45] V. L. Streeter and E. B. Wyle. Mecánica de los Fluidos. McGraw-Hill, 1988.
[46] G. J. van Wylen and R. E. Sonntag. Fundamentals of Classical Thermodynamics. John Wiley
and Sons, Inc., 1988.
[47] Yunus A. Cengel and Michel A. Boles. Termodinámica. McGraw-Hill, cuarta edition,
2002.
[48] Katsuhiko Ogata. Dinámica de Sistemas. Prentice Hall, 1987.
[49] ISO 6358. Pneumatic fluid power – Components using compressible fluids – Determination of
flow-rate characteristics. ISO, 1989.
[50] Ferdinand P. Beer and Jr. E.Rusell Johnston. Mecánica Vectorial para Ingenieros - Dinámica.
McGraw-Hill, sexta edition, 1997.
[51] Satoru Hayashi. Nonlinear Phenomena in Hydraulic Systems. 2000. Tohoku University,
981-3202, Sendai, Japan.
[52] H. Satoru. Nonlinear Phenomena In Hydraulic Systems. Tohoku University, Sendai, Japan,
2000.
[53] C. Canudas de Wit, H. Olsson, K. J. Åström, P. Lischinsky, and M. Gäfvert. Friction
Models and Friction Compensation. Nov. 1997.
[54] K. J. Astrom. Friction models and friction compensation. Technical report, Lund University, 2005.
[55] J. Gerhartz and D. Scholtz. Neumática en Bucle Cerrado. Festo Didactic KG. D-73734
Esslingen 1, 1995.
167
BIBLIOGRAFÍA
[56] W. Deppert and K. Stoll. Aplicaciones de la Neumática. Alfaomega-Marcombo, 2001.
[57] W. Deppert and K. Stoll. Dispositivos Neumáticos. Alfaomega-Marcombo, 2001.
[58] K. Kuroshita and N. Oneyama. Improvements of Test Method of Flow-rate Characteristics of
Pneumatic Components. SICE Annual Conference in Sapporo, pages 147–152, August 2004.
[59] Yesid Asaff. Desenvolvimento de um Sistema Servopneumático para Regulação de Velocidade
de Turbinas em Pequenas Centrais Hidrelétricas. Master’s thesis, Universisdade Federal de
Santa Catarina, Curso De Pós-Graduação Em Engenharia Mecânica, 2006.
[60] J.Shigley, C. Micshke, and R. Budynas. Mechanical Engineering Design. Mc-Graw-Hill,
2004.
[61] M. Montealegre, G. Londoño, and L. A. Polanía. Fundamentos de los Sistemas Dinámicos.
Universidad Surcolombiana, 1𝑡ℎ edition, 2002.
[62] Y. Kusnetsov. Elements of Applied Bifurcation Theory. Springer, 2004.
[63] L. H. Alves. Sistemas Dinâmicos. Livraria da Física, São Paulo, 2𝑡ℎ edition, 2006.
[64] T. S Parker and L. O Chua. Practical Numerical Algorithms for Chaotic Systems. SpringerVerlag, 1990.
[65] Dominik Schindele and Harald Aschemann. Adaptive Friction Compensation Based on the
LuGre Model for a Pneumatic Rodless Cylinder. IEEE, pages 1432–1437, July 2009.
[66] S. Sastry. Nonlinear Systems. Springer, 1999.
[67] Remco Ingmar Leine. Bifurcations in Discontinuous Mechanical Systems of Filippov-Type.
PhD thesis, Technische Universiteit Eindhoven, 2000.
[68] R.H.A Hensen, M.J.G. van de Molegraft, and M. Steinbuch. Friction Induced Hunting
Limit Cycles: A Comparison between the LuGre Model ans Switch Friction Model. Automatica,
Elsevier, 2003.
[69] P. Sekhavat, N. Sepehri, and Q. Wu. Impact stabilizing controller for hydraulic actuators
with friction: Theory and experiments. Control Engineering Practice, pages 1423–1433, Dec.
2006.
168
BIBLIOGRAFÍA
[70] J. J. E. Slotine and W. Li. Applied Nonlinear Control. Prentice Hall, 1991.
[71] H. Nijmeijer and A. J. van der Schaft. Nonlinear Dynamical Control Systems. Springer,
1990.
[72] K. M. Hangos, J Bokor, and G. Szederkényi. Analysis and Control of Nonlinear Process
Systems. Springer - Verlag, 2004.
[73] A. Isidori. Nonlinear Control Systems. Springer-Verlag, 1996.
[74] V. Utkin and A. Parnakh. Sliding Modes and Their Application in Variable Structure Systems.
MIR, 1978.
[75] Vladimir Utkin. Sliding Mode Control in Electro-Mechanical Systems. CRC Press, second
edition, 2009.
[76] Gildas Bensacon. No-linear Observers and Applications. Spriger, 2007.
[77] Antonio Creus Solé. Neumática e Hidráulica. Alfaomega-Marcombo, 2007.
169