Laboratorio de Técnicas Experimentales II
Anuncio

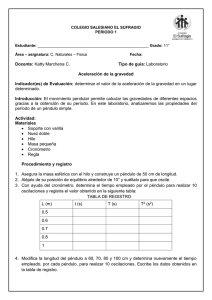
Laboratorio de Técnicas Experimentales II - 2º Física Laboratorio L2 - Mecánica Práctica L2-4 Movimiento oscilatorio rotativo: El péndulo de Pohl Objetivo 1. Estudio del movimiento oscilatorio: oscilaciones de torsión libres y amortiguadas. Material Equipo experimental formado por: péndulo de torsión, fuente de alimentación para el electroimán del péndulo de torsión, fuente de alimentación para el motor del péndulo de torsión. Cronómetro, cables. 1. Movimiento oscilatorio rotativo: El péndulo de Pohl. Introducción: El movimiento de un sistema rotatorio oscilante y amortiguado como el mostrado en la figura 1, está descrito por la ecuación diferencial J φ d 2φ dφ +γ + Dφ = 0 , 2 dt dt donde J es el momento de inercia, D la constante de torsión, φ la desviación de la posición de equilibrio y γ el coeficiente de amortiguación. resorte Péndulo de torsión La ecuación del movimiento resultante es: φ (t ) = φ0 e −δ t cos(ω t ) , γ 2 2 2 donde δ = , ω = ω0 − δ 2J ω0 y ω02 = D / J . es la frecuencia de oscilación del sistema sin amortiguar, y al producto δ T , que nos permite obtener el cociente entre máximos consecutivos ( = denomina decaimiento logarítmico. Electroimán (amortiguamiento) Figura 1: Esquema del sistema experimental: péndulo de Pohl e δ T ), se le Experimentos: 1) Oscilaciones no amortiguadas. Centrar el indicador del péndulo en el punto cero de la escala girando la rueda conectada al motor. Desviar el péndulo de su posición de equilibrio y medir el tiempo que tarda en efectuar 5 oscilaciones. Repetir las medidas varias veces. ¿Cuál es la frecuencia característica ω0 del sistema? Desviar el péndulo su máxima amplitud hacia un lado de la escala y medir la magnitud de los sucesivos máximos y mínimos de φ (es decir, se mide la evolución de la amplitud de las oscilaciones). (Si oscila demasiado rápido, se pueden tomar los datos de una de cada cinco oscilaciones). Representar en una gráfica esta evolución. Calcular el factor de amortiguamiento δ , y el decaimiento logarítmico δ T . 2) Oscilaciones amortiguadas. Ya que el péndulo es metálico, realizaremos el amortiguamiento por medio del electroimán. Repetir las mediciones del apartado anterior para cuatro situaciones con distinto amortiguamiento. Esto se consigue variando Ie , la corriente que pasa por el electroimán. Estas cuatro situaciones se tomarán para valores equiespaciados de Ie entre 0 e Imax. Imax será el valor para el cual se observe que el péndulo se detiene tras tres o cuatro oscilaciones. El valor de Ie no debe ser nunca superior a 1.0 Amperio. En todos los casos, medir la frecuencia de oscilación con el tiempo. Calcular el factor de amortiguamiento δ ω. Representar en una gráfica la evolución de , y el decaimiento logarítmico φ δT . Durante un breve período de tiempo, aumentar el valor de Ie a 1.5 Amperios. Desviar el péndulo su máxima amplitud hacia un lado de la escala. ¿Qué ocurre al soltarlo? ¿Por qué? Recordar : ω ≡ rad / s, ν = ω / 2π ≡ s −1 ≡ Hz Alumno: Grupo: Tutor: Fecha: Informe previo : Práctica L2-4 Movimiento oscilatorio rotativo: El péndulo de Pohl Representar 4 periodos de la función φ (t ) = φ0 e −δ t cos(ω t ) , comenzando en t=0. -1 El período es 1 segundo, la amplitud inicial es 10, y el factor de amortiguamiento es 0.1 s . qué se amortiguará el movimiento oscilatorio del péndulo metálico (ver figura 1) al poner en funcionamiento el electroimán?. ¿Por Alumno: Grupo: Tutor: Fecha: Informe de Laboratorio Práctica L2-4 Movimiento oscilatorio rotativo: El péndulo de Pohl 1. Oscilaciones no amortiguadas. Gráfica de la evolución de Frecuencia característica ω0 φ con el tiempo. del sistema: Factor de amortiguamiento intrínseco δ : 2. Oscilaciones amortiguadas. Gráficas de la evolución de Frecuencia de oscilación ω : Factor de amortiguamiento δ : φ con el tiempo, para Ie = 0.5 A e Ie = 1 A.