diseño e implementación de un control escalar para un convertidor
Anuncio

UNIVERSIDAD DE PAMPLONA
FACULTAD DE INGENIERÍAS Y ARQUITECTURA
PROGRAMA DE INGENIERÍA ELECTRÓNICA
TRABAJO PARA OPTAR POR EL TITULO DE INGENIERO ELECTRÓNICO
TITULO: DISEÑO E IMPLEMENTACIÓN DE UN CONTROL ESCALAR PARA
UN CONVERTIDOR DE FRECUENCIA TRIFÁSICO UTILIZANDO MODULACIÓN
PWM REGULAR, OPTIMIZADO PARA EL DSP 56F801.
AUTOR: JOSÉ OSVALDO ACEVEDO GALLARDO.
DIRECTOR: ING. RAMÓN ÁLVAREZ LÓPEZ
PAMPLONA, COLOMBIA
MAYO DE 2006
UNIVERSIDAD DE PAMPLONA
FACULTAD DE INGENIERÍAS Y ARQUITECTURA
PROGRAMA INGENIERÍA ELECTRÓNICA
TRABAJO PARA OPTAR POR EL TITULO DE INGENIERO ELECTRÓNICO
TITULO: DISEÑO E IMPLEMENTACIÓN DE UN CONTROL ESCALAR PARA
UN CONVERTIDOR DE FRECUENCIA TRIFÁSICO UTILIZANDO MODULACIÓN
PWM REGULAR, OPTIMIZADO PARA EL DSP 56F801.
NOMBRES Y FIRMAS DE AUTORIZACIÓN:
AUTOR: JOSÉ OSVALDO ACEVEDO GALLARDO
DIRECTOR: ING. RAMÓN ÁLVAREZ LÓPEZ
OPONENTE: ING. EUDIN SUÁREZ RIVERA
COORDINADOR DEL PROGRAMA: ING. RAMÓN ÁLVAREZ LÓPEZ
COMITÉ DE GRADO: Dr. ROCCO TARANTINO
PAMPLONA, COLOMBIA
MAYO DE 2006
UNIVERSIDAD DE PAMPLONA
FACULTAD DE INGENIERÍAS Y ARQUITECTURAS
PROGRAMA DE INGENIERÍA ELECTRÓNICA
TRABAJO PRESENTADO PARA OPTAR POR EL TÍTULO DE INGENIERO
ELECTRÓNICO
DISEÑO E IMPLEMENTACIÓN
DE UN CONTROL ESCALAR PARA UN
CONVERTIDOR DE FRECUENCIA TRIFÁSICO UTILIZANDO MODULACIÓN PWM
REGULAR, OPTIMIZADO PARA EL DSP 56F801.
Fecha De Inicio Del Trabajo: (21 De Marzo, 2006).
Fecha De Terminación Del Trabajo: (19 De Mayo, 2006).
Firmas De Autorización Para Sustentar El Trabajo De Grado:
Autor:
José Osvaldo Acevedo Gallardo.
______________________________
Director:
Ing. Ramón Álvarez López.
______________________________
Director Del Programa De Ing. Electrónica:
Ing. Ramón Álvarez López.
______________________________
Jurado Calificador Del Trabajo De Grado:
Presidente: Dr. Aldo Pardo García.
______________________________
Oponente: Ing. Eudin Suárez Rivera.
______________________________
Secretaria: Ing. Tania Liseth Acevedo. ______________________________
Pamplona Colombia, mayo del 2006
UNIVERSIDAD DE PAMPLONA
FACULTAD DE CIENCIAS NATURALES Y TECNOLÓGICAS
DEPARTAMENTO DE FÍSICA Y ELECTRÓNICA
PROGRAMA DE INGENIERÍA
SIENDO LAS _________ HORAS, DEL DÍA___________ DEL MES _______
DEL AÑO_____________
EL JURADO CALIFICADOR CONFORMADO POR:
PRESIDENTE: Dr. ALDO PARDO GARCÍA
SECRETARIO: Ing. TANIA LISETH ACEVEDO
OPONENTE: Ing. EUDIN SUÁREZ RIVERA
OTORGA LA CALIFICACIÓN
DESAPROBADO: _______________
APROBADO: ________________
AL TRABAJO DE GRADO TITULADO: DISEÑO E IMPLEMENTACIÓN DE UN
CONTROL ESCALAR PARA UN CONVERTIDOR DE FRECUENCIA TRIFÁSICO
UTILIZANDO MODULACIÓN PWM REGULAR, OPTIMIZADO PARA EL DSP
56F801.
DEL AUTOR: JOSÉ OSVALDO ACEVEDO GALLARDO
DIRECTOR: Ing. RAMÓN ÁLVAREZ LÓPEZ
OBSERVACIONES:
1. Recomendar para presentar en eventos científicos: ______
2. Recomendar para publicación: _______
3. Incluir en el fondo bibliográfico de la Universidad de Pamplona: _______
4. Recomendar para ser continuado en otros trabajos: ______
5. Recomendar para patente; _______
6. Recomendar continuar como trabajo de maestría _______
7. Recomendar continuar como trabajo de doctorado ______
8. Recomendar para categoría de meritorio ______
9. Recomendar para categoría de Laureado _______
10. Otras
__________________________________________________________________
Firmas del jurado.
PRESIDENTE
SECRETARIO
OPONENTE
“No se le puede enseñar nada a un hombre;
sólo ayudarle a encontrar la respuesta
dentro de sí mismo."
GALILEO GALILEI
A Dios que siempre ha estado
En todos los momentos de mi vida
Y por permitirme ser cada día mejor,
En cada instante de mi vida.
A mi madre Carmen y mi padre Gerardo,
Que Siempre han estado apoyándome
En cada instante.
A mis hermanos Sandra y Michael,
Que siempre están pendientes.
AGRADECIMIENTOS
A todos mis familiares que están pendientes en mis cosas, y se preocuparon por que todo
me surgiera de la mejor manera.
A mis amigos que me apoyaron en momentos difíciles y siempre estuvieron ahí.
Al profesor Ramón Álvarez López, por su dirección, y apoyo prestado durante la
realización de este trabajo.
A los Profesores de nuestra Universidad de Pamplona que de una y otra forma nos
brindaron sus conocimientos.
A la Universidad de Pamplona por la oportunidad de ser cada día mejor.
A todas aquellas personas participes en la realización de este trabajo.
OBJETIVOS
OBJETIVO GENERAL
Diseño e implementación del control escalar para un convertidor de frecuencia trifásico
utilizando modulación PWM regular, optimizado para el DSP 56f801.
OBJETIVOS ESPECÍFICOS
•
Diseñar un controlador utilizando PWM con frecuencias variables, en el DSP
56f801.
•
Analizar la estrategia de control escalar aplicada a los convertidores de frecuencia.
•
Analizar la modulación PWM regular.
•
Realizar la determinación en los tiempos de conmutación para los tiristores (IGBT).
•
Diseñar, Simular e Implementar la estrategia de control escalar de un convertidor
trifásico basado en la modulación PWM regular.
•
Implementar el algoritmo en el DSP para la optimización de las condiciones de
control.
•
Desarrollar un manual de operación de usuario para el óptimo aprovechamiento del
equipo resultante.
PROBLEMA
OBJETO
Control escalar para un convertidor de frecuencia trifásico
DESCRIPCIÓN DEL PROBLEMA
En la actualidad los motores de corriente directa son normalmente sustituidos por los
motores de corriente alterna, preferiblemente los motores de inducción donde estos poseen
ventajas; como en robustez, relación peso-potencia, mayor velocidad máxima, no necesitan
de mantenimiento continuo.
La mejor forma de regular el funcionamiento de los motores de inducción es por variación
de voltaje-frecuencia; una forma de lograr esto es por medio de un convertidor de
frecuencia.
Pero el costo de un convertidor de frecuencia en el mercado es muy elevado y muy difícil
de adquirir por una pequeña empresa, y desaprovechando así un gran potencial de
automatización en las empresas.
DELIMITACIÓN DEL PROBLEMA
En este trabajo de grado se profundiza en el diseño e implementación del control escalar
para un convertidor de frecuencia trifásico utilizando la modulación PWM regular, basado
en un DSP.
JUSTIFICACIÓN
En la actualidad las grandes y pequeñas empresas se encuentran en un gran desarrollo en la
automatización y en el manejo de los motores para sacar el mayor provecho de estos sin
afectar su rendimiento; Una forma de lograr un óptimo rendimiento y menos gasto en
mantenimiento-espacio es el reemplazo de estos motores de DC por los de motores de
inducción donde estos pueden funcionar en zonas explosivas y además no necesitan
mantenimiento continuo por la ausencia de escobillas; Hay que tener en cuenta la
regulación del funcionamiento de estos motores ya que debido a esto podemos controlar el
consumo de energía y aprovechar al máximo su diapasón de velocidades.
Dentro de los diferentes tipos de convertidores, se ha reconocido que emplean técnicas de
PWM que ofrecen un gran número de ventajas sobre sus rivales técnicas de conversión,
dentro de las cuales se pueden destacar, que el motor trabaja de manera suave, a bajas
velocidades, posibilidad de realizar el frenado por un módulo de frenado y un buen
rendimiento del sistema.
El propósito es realizar un convertidor de frecuencia utilizando técnicas de modulación
PWM regular. Y a partir de este poder obtener las ventajas anteriormente mencionadas en
un motor de inducción.
El control y el cuidado de los motores son sumamente importantes en la industria, la
utilización de inversores de frecuencia para el control de la velocidad de los motores es
algo muy común hoy en día en las industrias. No solo se logra un aporte al sector industrial,
si no también en la parte de la educación se les dan pautas a las estudiantes de carreras
afines a la Ingeniería Electrónica para crear sus propias herramientas y así aplicarlas en las
distintas áreas de estudio en sus vidas.
RESUMEN
Este trabajo consiste en el diseño e implementación del control escalar para un convertidor
de frecuencia trifásico utilizando modulación PWM regular, optimizado en el DSP para
regular la velocidad de motores, utilizando dispositivos electrónicos de estado sólido.
El Control Escalar esta basado en un DSP de Motorola, el cual se efectua por medio de un
control de mando, una visualización, que permite observar el estado de la variable de
salida.
Para la realización del trabajo primero se realiza un estudio de la estrategia de modulación
que se va a ejecutar, en este caso la modulación PWM regular y de su respectivo control a
utilizar como lo es en esta ocasión el control escalar, también se realiza un análisis de los
tiempos de conmutación de los tiristores “ los IGBT ”.
Después de los respectivos estudios y análisis para el proyecto la elaboración se lleva acabo
en diferentes etapas:
Se realizara una simulación en OrCAD PSPICE de los circuitos de control por modulación
de ancho de pulso PWM, para obtener los patrones que tendrá nuestra señal de control, el
cual nos dará el mejor porcentaje de distorsión armónica (THD) para poder implementar.
Diseño e implementación de los algoritmos los cuales serán cargados en el DSP, y
posteriormente se realizaran unas pruebas que nos conduzcan a la optimización del diseño.
Se elaborara un manual de operación de usuario para el mejor aprovechamiento del equipo
restante.
ABSTRACT
This work consists on the design and implementation of the control to climb for a convertor
of frequency using modulation PWM to regulate, optimized in the DSP to regulate the
speed of motors, using electronic devices of solid state.
The Control to climb this based on a DSP of Motorola, which is carried out by means of a
control, a visualization that allows observing the state of the exit variable.
For the realization of the first work is carried out a study of the modulation strategy that
will execute, in this case the modulation PWM to regulate and of their respective control to
use as it is it in this occasion the control to climb, he/she is also carried out an analysis of
the times of commutation of the tiristores the IGBT ".
After the respective studies and analysis for the project the elaboration is taken I end up in
different stages:
He/she was carried out a simulation in OrCAD PSPICE of the control circuits for
modulation of wide of pulse PWM, to obtain the patterns that he/she will have our control
sign, which will give us the best percentage of harmonic distortion (THD) to be able to
implement.
I design and implementations of the algorithms which will be loaded in the DSP, and later
on they were carried out some tests that lead us to the optimization of the design.
A manual of user's operation was elaborated for the best use in the remaining team.
SIMBOLOGÍA
Parámetros del motor de inducción
Rs
Resistencia del estator por fase
Rr
Resistencia del rotor por fase
Ls
Inductancia propia de estator por fase
Lr
Inductancia propia del rotor por fase
Lm
Inductancia mutua estator - rotor
Lls
Inductancia de dispersión del estator por fase
L lr
Inductancia de dispersión del rotor por fase
Lσ
Inductancia transitoria del estator Lσ = σLs = Ls −
τr
Constante de tiempo eléctrica del rotor τ r = Lr R r
τs
Constante de tiempo eléctrica del estator τ s = L s R s
σ
L2m
Coeficiente de dispersión o coeficiente de Blondel σ = 1−
L s Lr
P
Número de pares de polos
Parámetros del convertidor
m
índice de modulación
n
razón de modulación
np
número de pulsos
tp
ancho del pulso
L2m
Lr
Otros símbolos
s
Operador diferencial s = d dt
π
Valor de la constante universal pi (π = 3.14159...)
≈
Valor aproximado.
Siglas
BJT
“Bipolar Junction Transistor”
CA
Corriente Alterna
CAD
“Computer Aided Design”
CCM
“Current Control Mode”
CD
Corriente Directa
COMFET
“Conductivity Modulated Field - Effect Transistor”
CRPWM
“Current Regulated PWM”
CSI
“Current Source Inverter”
DSP
“Digital Signal Processor”
DTC
“Direct Torque Control”
HP
“Horse Power”
IGBT
“Isolated Gate Bipolar Transistor”
MCT–MOS “MOS Controlled Thyristor”
MOSFET
“Metal Oxide Semiconductor Field Effect Transistor”
PAM
“Pulse Amplitude Modulation”
PWM
“Pulse Width Modulation”
SOA
“Safe Operating Area”
SPWM
“Sinusoidal PWM”
V/F
Voltaje - Frecuencia
VSI
“Voltage Source Inverter”
TABLA DE CONTENIDO
Pág.
PENSAMIENTO .................................................................................................................. i
DEDICATORIA ................................................................................................................... ii
AGRADECIMIENTOS......................................................................................................... iii
OBJETIVOS ........................................................................................................................ iv
PROBLEMA ........................................................................................................................ v
JUSTIFICACIÓN ................................................................................................................ vi
RESUMEN ...........................................................................................................................viii
ABSTRACT .......................................................................................................................... ix
SIMBOLOGÍA ..................................................................................................................... x
INTRODUCCIÓN.................................................................................................................1
MARCO TEÓRICO.............................................................................................................2
CAPÍTULO 1: TEORÍA FUNDAMENTAL DE LOS MOTORES ................................2
1.1. Introducción a los motores eléctricos .............................................................................. 2
1.2. El motor eléctrico ............................................................................................................ 3
1.2.1. Generalidades del motor eléctrico. ............................................................................... 3
1.2.1.1. Indicadores técnicos ................................................................................................. 4
1.2.1.2. Indicadores económicos ........................................................................................... 8
1.3. El motor de inducción ................................................................................................... 10
1.3.1. Estator......................................................................................................................... 12
1.3.2. Rotor ........................................................................................................................... 13
1.3.3. Motor de inducción alimentado por voltajes no sinusoidales .................................... 15
CAPÍTULO 2: CONVERTIDORES DE FRECUENCIA ..............................................20
2.1. Introducción a los convertidores de frecuencia ............................................................ 20
2.2. Fundamentos de los convertidores de frecuencia .......................................................... 21
2.3. Funcionamiento del convertidor de frecuencia ............................................................. 21
2.3.1. Aportes y beneficios ................................................................................................... 22
2.4. Modulación por ancho de pulsos (PWM)...................................................................... 22
2.4.1. Técnicas de modulación por anchos de pulsos........................................................... 24
2.4.1.1. Modulación de pulso simple.................................................................................... 24
2.4.1.2. Modulación de pulsos múltiples .............................................................................. 24
2.4.1.3. Modulación sinusoidal............................................................................................. 24
2.4.2. Razón de modulación ................................................................................................. 25
2.4.3. Índice de modulación ................................................................................................. 26
2.4.3.1. Modulación en zona lineal y sobremodulación ....................................................... 26
2.5. Modulación PWM natural ............................................................................................. 27
2.6. Modulación PWM regular ............................................................................................. 31
CAPÍTULO 3: ESTRATEGIAS DE CONTROL ...........................................................36
3.1. Introducción a las estrategias de control........................................................................ 36
3.2. Estrategia de control ...................................................................................................... 37
3.2.1. Control escalar............................................................................................................ 37
3.2.1.1. Control voltaje – frecuencia (V/f) ........................................................................... 38
3.2.1.2. Control del deslizamiento ...................................................................................... 39
3.2.2. Control vectorial ........................................................................................................ 41
3.2.2.1. Control por campo orientado (FOC) ...................................................................... 41
3.2.2.2. Control sin sensores (Sensorless) ........................................................................... 42
3.2.2.3. Control directo del par (DTC) ................................................................................ 42
3.3. El transistor de potencia ............................................................................................... 43
3.3.1. Principio de funcionamiento de los transistores de potencia..................................... 45
3.3.2. Generalidades de los transistores de potencia ........................................................... 46
CAPÍTULO 4: CRITERIOS PARA EL DISEÑO ..........................................................49
4.1. Convertidor de frecuencia ............................................................................................. 49
4.2. Criterios de selección .................................................................................................... 49
4.3. El DSP (Procesador Digital de Señales)........................................................................ 50
4.3.1. Características básicas de un DSP .............................................................................. 51
4.3.2. Diferencias entre microcontroladores y DSP ............................................................. 52
4.4. Descripción del dispositivo ........................................................................................... 53
4.5. Diseño de las frecuencias a implementar. ..................................................................... 55
4.5.1. Modulación para frecuencia de salida de 60 hz........................................................ 55
4.5.2. Modulación para frecuencia de salida de 55 hz......................................................... 59
4.5.3. Modulación para frecuencia de salida de 50 hz...................................................... .. 62
4.6. Desfase de la señal......................................................................................................... 65
4.7. Tiempo de conmutación de los IGBT’s........................................................................ 66
4.8. Control PWM unipolar. ................................................................................................. 68
4.9. Manual de operación de usuario.................................................................................. 69
4.9.1. Control de mando. ..................................................................................................... 69
4.9.2. Visualización... ....................................................................................................... .. 70
4.9.3. Especificaciones del sistema. .................................................................................... 70
4.9.4. Precauciones .............................................................................................................. 71
ANÁLISIS ECONÓMICO................................................................................................... 72
MARCO LEGAL ................................................................................................................. 73
PROTECCION E HIGIENE DEL TRABAJO..................................................................... 74
IMPACTO AMBIENTAL.................................................................................................... 75
CONCLUSIONES................................................................................................................ 76
RECOMENDACIONES ...................................................................................................... 77
BIBLIOGRAFÍA .................................................................................................................. 78
REFERENCIAS DE INTERNET ........................................................................................ 79
ANEXOS .............................................................................................................................. 80
A. Datos practicos de laboratorio ......................................................................................... 80
B. Diagrama de flujo del algoritmo de implementación en el DSP ..................................... 83
C. Hoja de caracteristicas del DSP .......................................................................................84
D. Convertidores de frecuencia ............................................................................................86
ÍNDICE DE FIGURAS Y TABLAS
Pág.
CAPÍTULO 1: TEORÍA FUNDAMENTAL DE LOS MOTORES ................................2
Figura 1.1. El Motor de CD y las partes que lo constituyen................................................... 3
Figura 1.2. Característica Mecánica del Motor en el Accionamiento Eléctrico..................... 5
Figura 1.3. Características de igual Rigidez y diferente Estatismo. ....................................... 6
Figura 1.4. El Motor de Inducción CA................................................................................. 11
Figura 1.5. Estator del Motor de Inducción.......................................................................... 12
Figura 1.6. Rotor del Motor de Inducción............................................................................ 13
Figura 1.7. Circuito Equivalente del Motor de Inducción para el Armónico de orden k ..... 16
Figura 1.8. Circuito equivalente aproximado para armónicas de orden superiores. ............ 18
CAPÍTULO 2: CONVERTIDORES DE FRECUENCIA ..............................................20
Figura 2.1. Modulación PWM.............................................................................................. 23
Figura 2.2. Sobremodulación. .............................................................................................. 27
Figura 2.3. PWM Natural de dos niveles.............................................................................. 29
Figura 2.4. PWM Natural de tres niveles. ............................................................................ 30
Figura 2.5. PWM Regular de Dos niveles............................................................................ 33
Figura 2.6. PWM Regular Simétrica y Asimétrica............................................................... 34
CAPÍTULO 3: ESTRATEGIAS DE CONTROL ...........................................................36
Figura 3.1. Control de Velocidad V/F con Regulación de la Frecuencia del Deslizamiento39
Figura 3.2. Inversor CRPWM con control de la frecuencia del deslizamiento. ................... 40
Figura 3.3. Símbolo del Transistor IGBT Canal N............................................................... 45
Tabla 3.1. comparación de parámetros MOS – BIPOLAR. ................................................. 44
Tabla 3.2. Comparación de las Características de los transistores. ..................................... 48
CAPÍTULO 4: CRITERIOS PARA EL DISEÑO ..........................................................49
Figura 4.1. Esquema de un Convertidor de Frecuencia........................................................ 49
Figura 4.2. Diagrama en Bloque del control escalar para el convertidor de frecuencia....... 53
Figura 4.3. Periodo de Muestreo tm. .................................................................................... 54
Figura 4.4. Esquema de la Modulación en PSpice. Para obtener una frecuencia de 60 hz. . 56
Figura 4.5. Señal de Salida de la Modulación con Frecuencia de 60 hz .............................. 56
Figura 4.6. Señal del Análisis de Fourier de la señal de salida ............................................ 57
Figura 4.7. Datos obtenidos del Análisis de Fourier.. .......................................................... 57
Figura 4.8. Esquema de la modulación en PSpice. Para obtener una frecuencia de 55 hz. 59
Figura 4.9. Señal de salida de la modulación con frecuencia de 55 hz.. ............................. 60
Figura 4.10. Señal del Análisis de Fourier de la señal de salida..... ................................. .. 60
Figura 4.11. Datos obtenidos del Análisis de Fourier. ........................................................ 61
Figura 4.12. Esquema de la modulación en PSpice. Para obtener una frecuencia de 50 hz. 62
Figura 4.13. Señal de salida de la modulación con frecuencia de 50 hz. ........................... 63
Figura 4.14. Señal del Análisis de Fourier de la señal de salida.. ....................................... 63
Figura 4.15. Datos obtenidos del Análisis de Fourier. ..................................................... .. 64
Figura 4.16. Condición de los pulsos ............................................................................... .. 66
Figura 4.17. Diagrama de la etapa de potencia. (60 Hz.). ................................................... 68
Figura 4.18. Salida unipolar del Puente Rectificador. (60 Hz.)........................................... 69
Figura 4.19. Especificaciones del Sistema. ......................................................................... 70
ANEXOS .............................................................................................................................80
Figura A.1. Señal de Salida discreta.....................................................................................80
Figura A.2. Señal de Salida de 60 Hz...................................................................................81
Figura A.3. Señal de Salida de 60 Hz desfasada 120º ..........................................................81
Figura A.4. Señal de Salida de 60 Hz desfasada 240º o -120º........................................... ..82
Figura A.5. Diagrama en Bloques del DSP 56f801..............................................................82
Figura A.6. Aspecto exterior del ACS 600...........................................................................86
Figura A.7. Aspecto exterior del ACS 1000.........................................................................87
INTRODUCCIÓN
Con el transcurrir de los tiempos surgen los convertidores de frecuencia a causa de muchos
problemas en la industria, dándole mejoras tanto en la parte de la automatización como en
la parte lucrativa a la empresa, con los motores de CD. Surgían muchos inconvenientes,
reemplazar los motores de CD. Por los motores de CA., eran grandes motivaciones por las
ventajas que estos mostraban, y como poder sacar un mejor rendimiento de ello, eso se
alcanzaba con un convertidor de frecuencia el cual daba mayor eficiencia al motor de CA.
Los convertidores de frecuencia han experimentado una gran evolución, inicialmente se
manejaba la Modulación por Amplitud de Pulsos (PAM), utilizándolos en la industria de
baja y mediana potencia, y con el transcurrir de los tiempos fueron siendo reemplazados
por la modulación por Ancho de Pulsos (PWM). Anteriormente las técnicas de
conmutación eran técnicas analógicas, donde fueron sucesivamente sustituidas por las
técnicas digitales basadas en implementación en los microcontroladores lo cual seria más
fácil y eficiente.
Para obtener un buen desempeño de la modulación, hace falta una estrategia de control a
utilizar, y una técnica sencilla tanto en su diseño e implementación y además nos produce
buenos resultados es la estrategia de Control Escalar.
Buscando una simplicidad para el diseño llegamos a la simulación la cual nos ahorra
trabajo, tanto al diseñador en la realización de cálculos matemáticos a realizar, como al
DSP en el momento de ejecutar las instrucciones, donde se utilizará el software de
desarrollo OrCAD Capture PSPICE, donde nos ayuda mucho en la realización del proyecto.
MARCO TEÓRICO
CAPÍTULO 1
TEORÍA FUNDAMENTAL DE LOS MOTORES
1.1.
Introducción a los motores eléctricos
Los motores se conocen también como grupo de aparatos que se utilizan para convertir la
energía mecánica en eléctrica, o a la inversa, con medios electromagnéticos. A una máquina
que convierte la energía mecánica en eléctrica se le denomina generador, alternador o
dinamo, y a una máquina que convierte la energía eléctrica en mecánica se le denomina
motor.
Los motores se dividen en dos: los motores de CD. y los motores de CA., a su vez estos se
fraccionan en otras clases: Los motores de CD. se dividen en Rotor Devanado, Imán
Permanente, y Conmutados Electrónicamente, y los motores de AC. en Universales,
Síncronos y de Inducción. Donde estos últimos, los motores de inducción son los más
importantes para control industrial.
Los motores de inducción están sustituyendo a los de corriente continua en aquellas
aplicaciones en que se necesita un control de la velocidad, gracias entre otros factores al
desarrollo de la electrónica de potencia.
La función de un motor eléctrico. Cuando una fuente eléctrica es conectada a él, el motor
gira su eje. Decimos que un motor convierte la energía eléctrica en energía mecánica.
1.2.
El motor eléctrico
El motor eléctrico esta formado generalmente por una carcaza y un rotor, para el caso de
los motores de corriente, en la carcaza se encuentra un imán permanente.
Figura 1.1. El Motor de CD y las partes que lo constituyen. [7.]
El principio de funcionamiento de un motor de CD es el siguiente. Al aplicarse una
diferencia de potencial en los extremos de los devanados del motor se genera un campo
electromagnético, el cual hace que el campo magnético del imán permanente rechace el
campo magnético generado por los devanados del rotor, y debido a que el rotor se
encuentra montado sobre un eje, la fuerza de repulsión hace que el rotor gire. La velocidad
de rotación va a depender de la diferencia de potencial aplicada a las terminales del rotor.
Este funcionamiento es análogo al del oscilador controlado por voltaje (VCO).
1.2.1. Generalidades del motor eléctrico
En el diseño de un accionamiento eléctrico específico para un mecanismo industrial dado
tiene especial importancia la selección adecuada del motor eléctrico. Un motor mal
seleccionado puede provocar la disminución de su vida útil y la incapacidad de cumplir los
requerimientos tecnológicos que el mecanismo impone al accionamiento si su capacidad es
insuficiente y, por otra parte si esta sobredimensionado provoca una inversión inicial
superior a la necesaria y una operación a valores de eficiencia menores que el normal,
además si el motor es de CA da lugar a un brusco empeoramiento del factor de potencia.
En la selección y diseño de un accionamiento eléctrico de velocidad variable deben tenerse
en cuenta fundamentalmente los requerimientos impuestos al accionamiento por el
mecanismo. Estos requerimientos aunque, en general, pueden ser de índole muy diversa
respondiendo a la gran variedad de mecanismos que pueden encontrarse, pueden resumirse
en seis Indicadores Técnicos o parámetros fundamentales que sirven también para evaluar
cada tipo de variador o sistema de accionamiento eléctrico de velocidad variable, y los
Indicadores Económicos que siempre deben ser evaluados y son fundamentalmente dos.
1.2.1.1.
Indicadores técnicos
1- El diapasón de control de la velocidad se determina dividiendo la velocidad máxima de
operación necesaria entre la mínima:
D=
ωm. max
ωm.min
(1.1)
Casi siempre el diapasón se expresa en forma de proporciones tales como 4:1, 20:1, etc.
2- La gradación del control indica la cantidad de velocidades estables de operación del
método y se expresa cuantitativamente mediante el factor de gradación:
K gr =
ω m.n
ωm.n−1
ω m.n : es la velocidad en el paso n del control
(1.2)
ω m.n −1 : es la velocidad en el paso n-1 del control
Este indicador da idea de lo continuo (suave) o discreto que debe ser o es, un método de
control de velocidad.
3- La exactitud en estado estacionario se refiere a las variaciones que ocurren en la
velocidad ante perturbaciones externas tales como el voltaje, la temperatura o la carga
mecánica siendo esta última la más importante de todas por lo que, generalmente, este
indicador se evalúa a través de la denominada Rigidez de la característica mecánica a
carga nominal β N . La rigidez de la característica mecánica en general se define como:
β =−
dM
dω m
(1.3)
Si la característica es como la característica 2 de la figura 1.3. este valor es igual al
inverso de la pendiente de la característica mecánica en cada punto y debe evaluarse
para la carga nominal. Si la característica es lineal y descendente tal como la 1 la
rigidez es constante e igual a [3.]:
β =−
MN
MN
=−
Δω m
(ω o − ω mN )
(1.4)
Figura 1.2. Característica Mecánica del Motor en el Accionamiento Eléctrico. [3.]
Aunque este parámetro depende de la variación de la velocidad con la carga no siempre es
el mejor para evaluar este indicador, sobre todo cuando el diapasón de control es grande.
Para poder apreciar esto se hace referencia a las características de la figura 1.3. En ambas
características la rigidez es la misma, sin embargo, la variación de velocidad en la
característica 2 es mucho más ostensible ya que de vacío a plena carga se reduce en mucho
más de la mitad (el motor casi se detiene). Para tener en cuenta este elemento es mejor
evaluar el denominado Porciento de Estatismo de la característica que se define como:
%S =
ω o − ω m.n
.100
ωo
(1.5)
Figura 1.3. Características de igual Rigidez y diferente Estatismo
Si la característica es lineal, de las ecuaciones (1.4) y (1.5):
%S =
MN
β .ωo
(1.6)
A mayor porciento de estatismo peor es la exactitud de la característica. Como se aprecia,
el porciento de estatismo de la característica 2 es mucho mayor.
4- La calidad de la respuesta transitoria se refiere a la forma de la respuesta de velocidad
en función del tiempo cuando varía el Comando de control. Esta variación se supone
generalmente en forma de escalón, aunque para evaluar sistemas de altas prestaciones
dinámicas (sistemas de seguimiento) puede ser necesaria otra señal de prueba a la
entrada tal como la rampa. Este indicador tiene dos aspectos a considerar: la Rapidez de
Respuesta y la Oscilatoriedad o Estabilidad Relativa. La rapidez de respuesta se refiere
al tiempo en el que se alcanza un nuevo estado estacionario y la estabilidad relativa al
nivel de amplitud de las oscilaciones de la velocidad durante el período transitorio y el
tiempo en que ellas se mantienen. Estos aspectos serán discutidos en el capítulo
correspondiente a la regulación automática.
5- La dirección del control se refiere a si la velocidad puede variarse por encima o por
debajo o en ambos sentidos de la velocidad base, la cual es la correspondiente a la
característica mecánica natural en condiciones nominales.
6- La carga permisible se refiere al tipo de carga mecánica que debe ser accionada por el
variador de velocidad.
Esta clasificación puede hacerse basándose en tres criterios:
•
Sentido de rotación: Existen dos tipos de cargas: las No reversibles que sólo giran
en un sentido y las Reversibles que tienen o pueden girar en ambos sentidos.
•
Carácter de la carga: Se dice que es una Carga Pasiva cuando sólo consume energía
del accionamiento eléctrico y que es una
Carga Activa
cuando puede tanto
consumir como entregar energía al accionamiento eléctrico. Este es el caso de los
mecanismos o cargas sometidos a la acción de la gravedad, tales como las grúas y
los ascensores o mecanismos de elevación.
•
Relación momento-velocidad: Existen cargas de:
1.2.1.2.
•
Momento constante:
M c = cte.
•
Momento variable:
M c = M o + M 1.ω m + M 2 .ω m2
•
Potencia constante:
P = M c .ωm = cte.
Indicadores económicos
Éstos son de fundamental importancia ya que casi siempre deciden qué tipo de variador
de velocidad debe utilizarse. Existen métodos para realizar un estudio económico
comparativo entre diferentes tipos de variadores de velocidad con el objetivo de decidir
cuál es el más económico desde el punto de vista de la inversión inicial y de los costos de
explotación, ahora bien, en muchos casos la experiencia indica, de entrada, cual es el
mejor económicamente hablando.
La economía del control está determinada por los gastos de creación y explotación del
accionamiento eléctrico, será económico aquel accionamiento eléctrico controlado que
garantice una alta productividad del mecanismo por él movido, con una alta calidad de su
proceso tecnológico y que rápidamente, recupere la inversión en él realizada.
Podemos determinar:
η=
pM
PM + ΔP
(1.7)
Cuando el accionamiento trabaja a diferentes velocidades es preciso obtener el valor
promedio de la eficiencia en el ciclo de trabajo constituido por m pasos a través de la
expresión:
m
m
i −1
i −1
η p = ∑ PMi t i / ∑ ( PMi + ΔPi )t i.
(1.8)
PMi y ΔPi : potencia mecánica y pérdidas correspondientes al paso i.
ti : Tiempo que el accionamiento trabaja en dicho paso.
Las perdidas energéticas durante el proceso de control dependen del método empleado
para lograr la variación de la velocidad. Por lo general son grandes cuando él método
depende de variaciones en los circuitos de fuerza. Por ejemplo, la potencia de excitación
de las máquinas de corriente directa constituye del 1-5% de la potencia eléctrica
suministrada a los circuitos de fuerza.
Un importante indicador energético es el factor de potencia y la potencia reactiva tomada
durante el ciclo de trabajo. En el caso de los motores de corriente alterna el
desplazamiento entre la corriente y el voltaje del sistema determina la potencia reactiva
necesaria para crear el flujo magnético.
Conocida la potencia activa (Pa) y la potencia reactiva (Q) se puede determinar el factor
de potencia con el cual trabaja en un instante dado el motor:
cos ϕ =
Pu
P + Q2
2
a
(1.9)
El valor promedio del factor de potencia durante un ciclo de control de la velocidad:
m
cos ϕ P =
∑P t
ai i
i =1
m
∑(
i =1
(1.10)
p + Q )t i
2
ai
2
i
El factor de potencia nominal de la mayoría de los motores se encuentra entre
cos ϕ nom = 0.8 − 0.9 y depende de su potencia. Con el crecimiento de la potencia y de la
velocidad nominal de los motores aumenta su eficiencia. Por ejemplo, el factor de
potencia de los motores asincrónicos depende, fuertemente, de su potencia en vacío es
bajo debido a que el valor de la potencia reactiva necesario para crear el flujo es
relativamente alto y el valor de la potencia activa es baja, requerida solo para cubrir las
pérdidas constantes.
1.3.
El motor de inducción
Este motor se creó debido a la demanda de un motor síncrono polifásico con arranque
propio en tamaños menores, de menos de 50 HP. Que no necesitarán de excitación del
campo con CD y que posean las características de velocidad constante en el motor. El rotor
consiste de un devanado de jaula de ardilla, embobinado o vaciado, distribuido
uniformemente en las ranuras.
La diferencia entre el motor a inducción y el motor síncrono es que en el motor a inducción
el rotor no es un imán permanente sino que es un electroimán. Tiene barras de conducción
en todo su largo, incrustadas en ranuras a distancias uniformes alrededor de la periferia. Las
barras están conectadas con anillos (en cortocircuito como dicen los electricistas) a cada
extremidad del rotor. Están soldadas a las extremidades de las barras. Este ensamblado se
parece a las pequeñas jaulas rotativas para ejercer a mascotas como hámster y por eso a
veces se llama "jaula de ardillas", y los motores de inducción se llaman motores de jaula de
ardilla.
Cada par de barras es una revolución en cortocircuito, hablando magnéticamente. El rotor
se magnetiza por las corrientes inducidas en sus barras, debido a la acción del campo
magnético, girando en el estator. Mientras que el campo del estator pasa a lo largo de las
barras del rotor, el campo magnético que cambia induce altas corrientes en ellas y genera su
propio campo magnético. La polaridad del campo magnético inducido del rotor es tal que
repela al campo del estator que lo creó, y esta repulsión resulta en un torque sobre el rotor
que le causa de girar [7.].
Figura 1.4. El Motor de Inducción CA
Ya que el motor de inducción funciona por repulsión magnética, en lugar de por atracción
como el motor síncrono, ha sido llamado "un motor a inducción repulsiva".
Si no hubiera fricción en el sistema, el rotor giraría a una velocidad síncrona, pero no
produciría un torque útil. Bajo esta condición no hubiera movimiento relativo entre las
barras del rotor y el campo rotativo del estator, y no hubiera inducción de corriente en ellas.
En el momento en que se aplica una carga al motor, la velocidad se reduce, lo que provoca
que las barras del rotor corten las líneas magnéticas de fuerza del campo del estator y crean
la fuerza de repulsión en el rotor. El campo magnético inducido en el rotor se mueve en la
dirección opuesta a la rotación y la velocidad de este movimiento dependen de la carga
aplicada. Esto quiere decir que las RPM siempre serán inferiores a la velocidad síncrona.
La diferencia entre la velocidad actual y la velocidad síncrona se llama el deslizamiento.
Entre más grande es el deslizamiento, más grande es la corriente inducida en las barras del
rotor, y más grande el torque. La corriente en los enrolladas del estator también se
incrementa para crear las corrientes más largas en las barras.
Por estas razones la velocidad de un motor de inducción siempre dependerá de la carga.
1.3.1. Estator
El estator se compone de un núcleo de chapas de acero con ranuras semicerradas de una
pesada carcasa de acero o de fundición dentro de la cual está introducido a presión el
núcleo de chapas y de dos arrollamientos de hilo de cobre aislado y alojado en las ranuras y
llamados respectivamente “arrollamiento principal o de trabajo” y arrollamiento “auxiliar o
de arranque”.
En las ranuras ubicadas en el lado interior del estator se coloca un arrollamiento trifásico,
constituido por 3 arrollamientos iguales (uno por cada fase) desplazados 120º entre sí (para
un motor con un solo par de polos). Por lo visto en campos giratorios, los efectos
simultáneos de las 3 corrientes de una red trifásica originan un campo constante que gira a
velocidad síncrona (ns) [6.].
Figura 1.5. Estator del Motor de Inducción.
1.3.2. Rotor
El rotor dispone de tres partes importantes. La primera de ellas es el núcleo, formado por un
paquete de laminas o chapas de hierro de elevada calidad magnética. La segunda es el eje,
sobre el cual va ajustada a presión el paquete de chapas. La tercera es el arrollamiento
llamado “jaula de ardilla” que consiste en una serie de barras de gran sección, alojadas en
sendas ranuras axiales practicadas en la periferia del núcleo y unidas en cortocircuito
mediante dos gruesos aros de cobre, situados en cada extremo del núcleo. En la mayoría de
los motores de inducción el arrollamiento rotórico es de aluminio y está fundido en una sola
pieza.
Figura 1.6. Rotor del Motor de Inducción. [6.]
Si en el interior del estator colocamos una espira en cortocircuito (rotor) que pueda girar
alrededor de un eje, se tiene que:
•
Al conectar el estator a la red se origina un campo giratorio que originará una fem
inducida.
•
Esta fem inducida, a su vez hace circular una corriente en la espira en cortocircuito
(rotor), y por la acción del campo magnético creará cuplas distribuidas a lo largo de
la espira haciendo que ésta trate de seguir al campo giratorio.
•
Es obvio que la espira nunca podrá alcanzar al campo giratorio debido a la cupla
resistente, que está compuesta en prime r término por las pérdidas por rozamiento
en los cojinetes, y en segundo término por la carga que mueve el eje del motor.
•
Es decir que siempre habrá una diferencia entre la velocidad “ns” del campo
giratorio y la del rotor “n” (o la del eje del motor).
Por lo tanto, llamaremos velocidad relativa a la diferencia entre ns y n, que para el caso de
motores será positiva y para el caso de generadores será negativa.
n rel . = n s − n
(1.11)
Donde,
nrel .
ns
: Velocidad del deslizamiento de la maquina
: Velocidad de los campos magnéticos
n : Velocidad mecánica del eje del motor
La magnitud característica que determina las condiciones de trabajo de la máquina
asíncrona es el deslizamiento, definido como:
S=
ns − s
ns
(1.12)
Donde,
S
: Deslizamiento de la maquina.
El deslizamiento es positivo cuando la máquina trabaja como motor y negativo cuando ésta
trabaja como generador.
Además
n = ns − ns * S
(1.13)
n = n s * (1 − S )
(1.14)
Recordando que,
ns =
60 * f
Pp
(1.15)
Donde,
f
: La frecuencia de la línea (Hz.)
Pp : El número de pares de polo de la maquina.
Luego se tiene que,
n=
60 * f
* (1 − S )
Pp
(1.16)
1.3.3. Motor de inducción alimentado por voltajes no sinusoidales
Los inversores trifásicos utilizados en el control por variación de la frecuencia dan ondas
de voltaje y corriente no sinusoidales. Esto provoca el aumento de las pérdidas y la
aparición de momentos pulsantes en el motor que pueden ser de importancia en su
selección y aplicación. En general, la onda de voltaje contiene una componente
fundamental y armónicas impares de orden superior, con la expresión [3.]:
us (t ) = 2.U s1. cos(ω1t ) + 2.U s 5 . cos(5ω1t ) + 2.U s 7 . cos(7ω1t ) + ....
(1.17)
En esta expresión no aparecen la armónica de orden tres y sus múltiplos, debido a la
conexión trifásica del inversor y el motor.
El análisis del comportamiento del motor puede llevarse a cabo suponiendo que cada
armónico de voltaje actúa por separado para determinar la corriente correspondiente y
aplicar posteriormente el principio de superposición. Para esto se utilizará un circuito
equivalente para cada armónica el cual queda como aparece en la figura 1.7. para la
armónica de orden k.
RS k
kXfS k
RR k’/s
kXfR k’
kXm k
Figura 1.7. Circuito Equivalente del Motor de Inducción para el Armónico de orden k
RS .k
: son las resistencias del estator.
RR.k : son las resistencias del rotor.
Cuyo valor varía al variar la frecuencia de la armónica debido al efecto pelicular. Este
efecto es particularmente notable en el rotor y en aquellos motores de ranura más profunda.
Esta resistencia puede ser, en éste último caso, de 5 a 10 veces la resistencia a la corriente
continua.
kX f .S .k
: son las reactancias de dispersión del estator
kX f . R .k : son las reactancias de dispersión del rotor
Las cuales también se ven afectadas por el efecto pelicular.
kX m.k : es la reactancia magnetizante.
Debe señalarse que la inductancia magnetizante de la cual depende esta reactancia debido a
la existencia de una onda de densidad
de
flujo
no sinusoidal con valores pico
relativamente altos es menor que a la frecuencia fundamental, debido al efecto de una
mayor saturación del circuito magnético de la máquina. Esto implica una mayor corriente
magnetizante.
El deslizamiento de la armónica k está dado por:
sk =
k .ω1 ± ω R
k .ω1
(1.18)
El signo depende de si se trata de una armónica de secuencia positiva o negativa. Como ω R
está muy cerca de ω1 :
sk =
k ±1
k
Cumpliéndose también que
(1.19)
RR.k
es muy pequeño en comparación con las reactancias de
sk
dispersión, al igual que Rs .k . Si se desprecia también la reactancia magnetizante por estar
en paralelo y ser mucho mayor que la de dispersión, se obtiene el circuito equivalente de la
figura 1.3 válido para las armónicas superiores, donde:
X c.c.k = k .( X f .S .k + X f . R .k )
(1.20)
Obsérvese que las armónicas de corriente no dependen de la carga mecánica del motor.
Esto quiere decir que mientras menos carga tenga el motor, mayor es la deformación de la
corriente con respecto a una onda sinusoidal.
k (XfS k+ XfR k’)
Figura 1.8. Circuito equivalente aproximado para armónicas de orden superiores
Después de aplicar el principio de superposición puede obtenerse que, para cada una de las
tres fases del motor, la corriente tiene las siguientes expresiones (suponiendo la corriente
de la fase A como referencia):
iSA = 2.I S1. cos(ω1t ) + 2.I S 5 . cos(5ω1t ) + 2.I S 7 . cos(7ω1t ) + .....
(1.21a)
iSB = 2 .I S 1. cos(ω1t −
2π
2π
2π
) + 2.I S 5 . cos(5ω1t +
) + 2 .I S 7 . cos(7ω1t − ) + .....
3
3
3
(1.21b)
iSC = 2 .I S1 . cos(ω1t +
2.π
2.π
2.π
) + 2 .I S 5 . cos(5ω1t −
) + 2 .I S 7 . cos(7ω1t +
) + ...
3
3
3
(1.21c)
De estas ecuaciones pueden llegarse a las siguientes conclusiones:
1- Las armónicas de orden k = 3n + 1 (n es igual a 0, 2, 4 etc) producen una fuerza
magnetomotriz giratoria de velocidad igual a kω S ( ω S = {ω1 /[ P / 2]} ) en el sentido de
la rotación del motor.
2- Las armónicas de orden k = 3n + 2 (n es igual a 1, 3, 5, etc.) producen una fuerza
magnetomotriz giratoria a velocidad igual a k ω S en sentido contrario a la rotación del
motor.
3- Las armónicas de orden k = 3n no existen en un devanado trifásico.
CAPÍTULO 2
CONVERTIDORES DE FRECUENCIA
2.1.
Introducción a los convertidores de frecuencia
Los inversores CD.-CA. se emplean en fuentes de energía interrumpidas y controles de
velocidad para motores de CA. Esto se aplica en el control de la magnitud y la frecuencia
de la señal de salida. En la mayor parte del tiempo, el flujo de potencia se da desde el lado
de CD. hacia el lado de CA., requiriendo una operación en modo inversor, lo cual más
comúnmente es conocido como inversor controlado.
Los inversores controlados son de dos tipos: los VSI o inversores fuente de voltaje y los
CSI o inversores fuente de corriente
Un inversor utilizado con un buen propósito debe tener la posibilidad de variar a la vez, el
voltaje y la frecuencia de la salida para evitar la saturación magnética en el motor,
manteniendo una relación aproximadamente constante.
Los inversores de fuente de voltaje son clasificados, generalmente, en dos tipos:
Modulación por Amplitud de Pulso (PAM) y Modulación por Ancho de Pulso (PWM).
Estos inversores se desarrollaron a principios de los 60 cuando se introdujeron las técnicas
de conmutación forzadas, como los esquemas de conmutación de McMurray-Bedford. Los
inversores de fuente de voltaje PAM, normalmente utilizados en aplicaciones industriales
de baja y media potencia, han sido totalmente reemplazados por los inversores PWM. El
propósito de la modulación PWM es generar una onda de salida de la magnitud y
frecuencia deseada, con una composición de pulsos de ancho variable.[3.]
2.2.
Fundamentos de los convertidores de frecuencia
Un regulador electrónico de velocidad está formado por circuitos que incorporan
transistores de potencia como el IGBT (transistor bipolar de puerta aislada) o tiristores,
siendo el principio básico de funcionamiento transformar la energía eléctrica de frecuencia
industrial en energía eléctrica de frecuencia variable.
Esta variación de frecuencia se consigue mediante dos etapas en serie. Una etapa
rectificadora que transforma la corriente alterna en continua, con toda la potencia en el
llamado circuito intermedio y otra inversora que transforma la corriente continua en alterna,
con una frecuencia y una tensión regulables, que dependerán de los valores de consigna. A
esta segunda etapa también se le suele llamar ondulador. Todo el conjunto del convertidor
de frecuencia recibe el nombre de inversor.
Los inversores controlados son en realidad convertidores de cuatro cuadrantes, es decir, el
flujo de potencia instantánea (Po = Vo * Io) durante dos intervalos no continuos de cuatro
posibles, viaja del lado de CD al lado de CA correspondiéndole un modo de operación de
inversor. Sin embargo, durante los dos intervalos restantes no continuos, la potencia
instantánea fluye del lado de CA al lado de CD, lo cual corresponde a un modo de
operación de rectificador. Las variables empleadas para detectar dicho comportamiento son
las correspondientes a la salida del inversor Vo e Io.
2.3.
Funcionamiento del convertidor de frecuencia
El funcionamiento de un convertidor de frecuencia es sustituir una tensión de entrada de
corriente alterna con magnitud y frecuencia fija, en una tensión simétrica de salida en
corriente alterna, con amplitud y frecuencia requeridas. Entre estas dos etapas hay una
etapa intermedia de rectificación a corriente continua de la entrada, para después ondular a
las magnitudes necesarias.
2.3.1. Aportes y beneficios
•
Mejora el proceso de control y por lo tanto la calidad del producto.
•
Se puede programar un arranque suave, parada y freno (funciones de arrancador
progresivo).
2.4.
•
Amplio rango de velocidad, par y potencia. (Velocidades continuas y discretas).
•
Bucles de velocidad.
•
Puede controlar varios motores.
•
Factor de potencia unitario.
•
Respuesta dinámica comparable con los drivers de DC.
•
Capacidad de by-pass ante fallos del variador.
•
Protección integrada del motor.
•
Marcha paso a paso
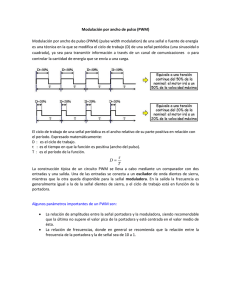
Modulación por ancho de pulsos (PWM)
En la modulación por anchos de pulsos (PWM) la frecuencia se controla con pulsos
positivos durante medio período y pulsos negativos durante el siguiente medio período. El
circuito de control establece los tiempos de activación y desactivación de los dispositivos
de potencia, que de acuerdo a la estrategia utilizada, puede ser en los puntos de intersección
entre una tensión sinusoidal denominada onda moduladora o de referencia y una tensión
triangular llamada onda portadora. La frecuencia de la tensión sinusoidal debe ser igual a la
frecuencia que se desea obtener del convertidor de frecuencia y por tanto, se controla por
medio de la señal de entrada del circuito de control. La relación entre la amplitud de la
tensión sinusoidal y la amplitud de la tensión triangular determina la anchura de los pulsos
de tensión que se aplican al motor y por ende el valor de voltaje.
Figura 2.1. Modulación PWM
Las formas de ondas no sinusoidales, obtenidas a la salida del inversor, se analizan
aplicando el desarrollo en series de Fourier. Cuando la onda es periódica, se puede
descomponer en la suma de una componente continua, una componente fundamental
sinusoidal de la misma frecuencia y una serie de armónicos, también sinusoidales, cuya
frecuencia es múltiplo de la frecuencia de la onda original.
Si existe simetría de semionda (semiciclos positivos y negativos iguales) desaparece la
componente continua y todos los armónicos pares. Si en las tres salidas se generan las
mismas formas de onda, desfasadas a 1200, desaparecen todos los armónicos múltiplos de
3. Para la forma de onda de la figura el primer armónico de importancia es el 5 (de
secuencia inversa) seguido del 7, 11, etc.
Si todo esto se refiere a un motor de corriente alterna, es posible que algunos armónicos
contribuyan a que el rotor gire en el sentido correcto, otros crean un campo en sentido
contrario y la mayoría simplemente lo calientan disminuyendo la eficiencia del sistema.
También, debido a la reactancia del motor, los armónicos de frecuencia muy elevada tienen
poca influencia en la intensidad y basta eliminar las frecuencias más bajas. A pesar del
número reducido de frecuencias armónicas bajas, se producen pérdidas suplementarias en el
motor y esto se ilustra más claramente por la recomendación de los fabricantes de los
convertidores PWM de procurar que los motores que están funcionando de manera continua
no estén sometidos a una carga superior al 85-95% del momento nominal.
Por ello surge la necesidad de reducir los armónicos en la de salida de inversor, para
mejorar sobre todo la eficiencia del sistema convertidor - motor, esto puede lograrse
aplicando modulación por ancho de pulso sinusoidal, donde se actúa sobre los tiempos de
conducción siguiendo una ley sinusoidal.
2.4.1. Técnicas de modulación por anchos de pulsos
Existen varia técnicas propuestas de modulación PWM entre ellas tenemos [3.]:
2.4.1.1.
Modulación de pulso simple
Es una técnica de modulación básica, requiere solamente de dos conmutaciones por ciclo,
sin embargo, sólo se usa en aplicaciones limitadas, por ejemplo, en alimentación de
motores de inducción de media y baja potencia, debido al gran contenido de armónicos que
presenta la onda cuasicuadrada, lo cual provoca que la operación del motor de inducción
sea ineficiente y tenga un desempeño insatisfactorio a bajas velocidades. A pesar de esta
limitación, esta técnica ofrece menos pérdidas por conmutación que el resto de las técnicas.
2.4.1.2.
Modulación de pulsos múltiples
Esta se caracteriza por el utilizar un tren de pulsos por semiperíodo. Todos los pulsos tienen
el mismo ancho. En este tipo de modulación, al aumentar el número de pulsos o el ancho de
los mismos, disminuye el contenido de armónicos relativo de la onda a partir de un número
de pulsos igual a 10, la reducción en el contenido de armónicos relativo no es apreciable y
la frecuencia en el inversor es muy alta.
2.4.1.3.
Modulación sinusoidal
La técnica de modulación por ancho de pulso sinusoidal (SPWM), es la más comúnmente
utilizada y existen algunas variaciones de la misma, las cuales optimizan algún criterio en
particular.
El contenido de armónicos en el voltaje de salida del convertidor puede ser reducido
considerablemente usando un conjunto de pulsos en cada semiperíodo. Si esa modulación
se realiza con una función sinusoidal, se obtiene una marcada reducción en el contenido de
armónicos de la salida. En este método, una señal portadora triangular, se compara con una
onda moduladora sinusoidal para determinar los instantes de conmutación. Esta técnica de
modulación puede ser implementada fácilmente utilizando circuitos analógicos, sin
embargo, su implementación en sistemas digitales o a microprocesadores no resulta fácil,
pues el ancho de los pulsos no se puede obtener a través de funciones analíticas. Para la
implementación en este tipo de sistemas, sin embargo, varias técnicas como la de muestreo
natural, regular y optimizado, así como otros métodos, son usados para calcular el ancho de
los pulsos. Además los métodos de eliminación de armónicos han sido propuestos,
específicamente para sistemas digitales.
2.4.2. Razón de modulación
Razón de modulación (Carrier Ratio) es la relación entre la frecuencia de la onda portadora
y la frecuencia fundamental se le denomina razón de la portadora o de modulación.
n=
f portadora
f referencia
(2.1)
Para disminuir el contenido de armónicos, esta razón es de gran importancia, donde su
valor debe ser alto y así obtener un gran numero de pulsos en la onda fundamental. Este
numero de pulsos esta limitado por el tipo de dispositivos de potencia utilizados.
Sin embargo, existen varios motivos para limitar la relación n:
a) Existe un límite con respecto a la velocidad a la cual los dispositivos de potencia
pueden ser activados o desactivados. Además, cada desactivación forzada de un
tiristor cuesta energía. Por lo tanto una relación elevada de n (frecuentes
desenergizaciones) corresponde a una reducción del rendimiento del convertidor de
frecuencia. Si los tiristores del inversor se sustituyen por transistores es posible
reducir las pérdidas por desenergización.
b) Una relación de n elevada corresponde a numerosos “agujeros” en la tensión, la cual,
por tanto, no puede tomar el valor máximo; sin embargo, este valor es necesario
cuando se desea obtener el par máximo a frecuencia nominal del motor. Pero a bajas
frecuencias es normal tener una relación elevada de n, y obtener una tensión que
corresponde a la frecuencia.
2.4.3. Índice de modulación
Para variar el voltaje se varía la relación entre el valor máximo de la onda moduladora y el
de la portadora. Esta relación se denomina índice de modulación o profundidad de
modulación y se define como:
m=
v referencia ( max )
v portadora ( max )
2.4.3.1.
(2.2)
Modulación en zona lineal y sobremodulación
Cuando el índice de modulación de amplitud es menor que la unidad (m <1) se dice que la
modulación es lineal, siendo la amplitud del primer armónico de la onda PWM
proporcional a la amplitud de control. Cuando el índice de modulación de amplitud es
mayor que la unidad (m >1), el sistema entra en un estado de saturación denominada
sobremodulación, donde ya no se verifica la relación anterior, y la señal PWM de salida
tiene una mayor tasa de armónicos.
Figura 2.2. Sobremodulación.
2.5.
Modulación PWM natural
La mayoría de los inversores PWM analógicos implementados utilizan esquemas de control
que emplean técnicas de muestreo natural. Una realización práctica, mostrando los rasgos
generales de ese modo de muestreo, es ilustrada en la figura 2.3. Esta técnica de
modulación se denomina PWM de muestreo natural, o sencillamente PWM natural o
triangular. En la figura se puede apreciar que una onda portadora triangular es comparada
directamente con una onda sinusoidal moduladora, para determinar el instante de
conmutación, y por consiguiente, el ancho del pulso resultante.
Es importante señalar que, debido a que los bordes de conmutación de la modulación por
ancho de pulso, son determinados por la intercepción instantánea de las dos ondas, el ancho
de pulso resultante es proporcional a la amplitud de la onda moduladora en el instante en
que ocurre la conmutación. Esto tiene dos consecuencias importantes: la primera es que los
centros de los pulsos de la onda, en la modulación por ancho de pulso resultante, no están
equidistantes o uniformemente espaciados y la segunda es, que no es posible definir el
ancho de los pulsos utilizando expresiones analíticas.
De hecho, es útil mostrar que el ancho de pulso sólo puede ser definido utilizando una
ecuación trascendental de la forma:
tp =
T ⎡ Vm
(sen ω t1 + sen ω t 2 )⎤⎥
1+
⎢
2⎣
2
⎦
(2.3)
Donde,
tp : Ancho del pulso.
T : Período de la señal moduladora.
Vm : Amplitud de la señal moduladora.
t1 : Inicio del pulso modulado.
t2 : Fin del pulso modulado.
Debido a esta relación trascendental existente entre los tiempos de conmutación, no es
posible calcular directamente el ancho de los pulsos modulados. Por lo tanto, el ancho de
los pulsos sólo puede ser definido en términos de una serie de funciones Bessel.
Para construir un modelo computacional de la modulación natural se requiere del proceso
ilustrado en la figura 2.3, el cual puede ser simulado directamente en la computadora y el
instante de conmutación de la PWM es determinado usando técnicas numéricas, como los
métodos de Gauss - Seidel o Newton - Raphson.
Por ello, dichas ecuaciones no pueden ser utilizadas directamente, excepto en sistemas a
microprocesadores con gran capacidad para el cálculo aritmético. Otra solución es utilizar
una computadora para el cálculo de los instantes de conmutación y luego grabarlo en una
memoria de sólo lectura para su posterior uso, pero esto requiere de un gran espacio de
memoria para guardar los anchos de pulso para un amplio rango de voltaje y frecuencia de
la salida.
Figura 2.3. PWM Natural de dos niveles.
Donde,
a - Onda moduladora.
b - Onda portadora.
c - Voltaje PWM.
d - Armónico fundamental del voltaje PWM.
También es posible generar un tercer nivel de la forma de onda de la modulación por ancho
de pulso por conmutaciones entre (+1 y -1) como se muestra en la figura 2.4. Esta forma de
modulación por ancho de pulso de tres niveles es típica de la forma de onda del voltaje de
línea en inversores monofásicos y trifásicos, no incluye el portador de armónicos de
frecuencia. La forma de onda de tres niveles puede ser generada por la combinación de las
formas de onda de PWM de dos niveles de dos fases adecuadamente o generadas
directamente como se muestra en la figura 2.4. Como se puede apreciar en la misma, el
pulso cambia de polaridad cada medio ciclo, y por consiguiente, el ancho de pulso en este
medio ciclo requiere, para ser modulado, del semiciclo positivo de una onda moduladora.
Figura 2.4. PWM Natural de tres niveles.
Donde,
a - Onda moduladora.
b - Onda portadora.
c - PWM de dos niveles.
d - Polaridad del circuito de control.
e - Voltaje del PWM de tres niveles.
f - Armónico fundamental del voltaje PWM
La onda no sinusoidal en la figura 2.4 representa la función de disparos lógicos o secuencia
de disparos, la cual es necesaria aplicar correctamente para la conmutación de los
dispositivos de potencia en el circuito inversor.
Una vez obtenidos los modelos computarizados de dos y tres niveles de la PWM natural,
entonces, estos pueden ser utilizados como bloque básico para construir una amplia
variedad de sistemas inversores monofásicos y polifásicos con PWM natural.
2.6.
Modulación PWM regular
El inversor con PWM regular es reconocido por obtener ciertas ventajas cuando se utiliza
una implementación digital o técnicas a microprocesadores.
En este modo de modulación, la amplitud de la señal moduladora en el instante t1 es
almacenada por un circuito de muestreo y retención operando a la frecuencia de la
portadora, y mantenida en un nivel constante durante el intervalo t1 - t2 hasta que la
próxima muestra sea tomada. Eso produce una versión discretizada de la señal moduladora
(b). Comparando (b) con la portadora (c) se definen los puntos de intercepción, utilizados
para determinar los instantes de conmutación T1 y T2 de los pulsos modulados (d). La
variación de la onda fundamental (d) de la PWM se representa en la figura 2.5.
Como resultado de este proceso, la onda moduladora tiene una amplitud constante mientras
se toma cada muestra y, consecuentemente, el ancho de los pulsos es proporcional a la
amplitud de la onda moduladora en los tiempos de muestreo uniformemente espaciados.
Esto es una característica importante del muestreo regular, donde las posiciones de los
muestreos y los valores de estos pueden ser definidos inequívocamente, tal que los pulsos
producidos, son predecibles en ancho y posición, lo cual no ocurre en el proceso de
muestreo natural.
Debido a esta facilidad para definir con precisión la configuración del pulso, en este tipo de
modulación, es posible derivar funciones trigonométricas simples para calcular el ancho del
pulso.
De acuerdo a la figura 2.6, el ancho del pulso puede ser definido, en términos de valores de
muestreo de la onda moduladora tomada en un tiempo t1, según la expresión:
tp =
T
[1 + Vm sen (ω m t1 ) ]
2
(2.4)
Donde,
tp - Ancho del pulso.
T - Período de la señal moduladora.
Vm - Amplitud de la señal moduladora.
ωm - Frecuencia de la señal moduladora.
Esta ecuación puede ser utilizada para calcular directamente el ancho del pulso y formar las
bases del algoritmo computacional.
Se debe destacar que, como resultado de poder calcular con precisión el ancho de pulso
utilizando ecuaciones trigonométricas simples, se puede realizar este tipo de Modulación
PWM en tiempo real utilizando la capacidad computacional de los microprocesadores que
existen hoy en día
Figura 2.5. PWM Regular de Dos niveles.
Como se ilustra en la parte superior de la figura 2.6, el grado de modulación del borde de
cada pulso, con respecto a las posiciones del pulso regularmente espaciado, es el mismo.
Ese tipo de modulación se llama usualmente modulación simétrica. Esto también posibilita
modular el borde de cada pulso por uno bastante diferente, como se muestra en la parte
inferior de la figura 2.6. En este caso, el primer y último borde de cada pulso es
determinado utilizando dos muestras diferentes de la onda moduladora, tomadas en los
instantes de tiempo t1 y t3, respectivamente.
Como se ilustra en la parte superior de la figura 2.6, el grado de modulación del borde de
cada pulso, con respecto a las posiciones del pulso regularmente espaciado, es el mismo.
Ese tipo de modulación se llama usualmente modulación simétrica. Esto también posibilita
modular el borde de cada pulso por uno bastante diferente, como se muestra en la parte
inferior de la figura 2.6. En este caso, el primer y último borde de cada pulso es
determinado utilizando dos muestras diferentes de la onda moduladora, tomadas en los
instantes de tiempo t1 y t3, respectivamente.
Figura 2.6. PWM Regular Simétrica y Asimétrica.
El ancho del pulso resultante, modulado asimétricamente, puede ser definido en términos
de los tiempos de muestreo, según la siguiente expresión:
tp =
T
2
M
⎡
⎤
⎢⎣1 + 2 (sen ω m t1 + sen ω m t 3 )⎥⎦
Donde,
tp - Ancho del pulso.
T - Período de la señal moduladora.
Vm - Amplitud de la señal moduladora.
ωm - Frecuencia de la señal moduladora.
(2.5)
Debido a una mayor información acerca de la onda moduladora, contenida en las formas de
onda PWM asimétrica, el espectro de armónicos de esta es superior al producido utilizando
la modulación simétrica. Sin embargo, el número de cálculos requerido para generar una
PWM asimétrica es el doble del requerido para una PWM simétrica. Esto puede aumentar
significativamente el tiempo de cálculo requerido (si es utilizado un sistema a
microprocesadores para generar las formas de onda de control del inversor PWM) y, de esta
forma, se reduce la frecuencia de salida máxima del inversor.
CAPÍTULO 3
ESTRATEGIAS DE CONTROL
3.1.
Introducción a las estrategias de control
El desarrollo de la ciencia y la técnica ha posibilitado que los procesos productivos sean
capaces de cumplir cada vez en mayor medida, las más complejas exigencias en cuanto a
calidad, eficiencia y productividad del trabajo se refiere. No ha bastado para ello con la
existencia de potentes y complejas máquinas o mecanismos industriales, sino que también
ha sido imprescindible, la creación de dispositivos y sistemas encargados de ponerlas en
movimiento y controlar su operación.
Uno de los factores determinantes a la hora de implementar un sistema de control para el
motor de inducción es el tipo de inversor utilizado y la estrategia de control implementada.
En equipos de potencia media y baja, la frecuencia de conmutación deja de ser un factor
restrictivo. Los objetivos del sistema de modulación van a ser, en este caso, dos:
• Obtener una buena respuesta dinámica
• Minimizar las distorsiones en las corrientes
Estos dos puntos van a ser contradictorios en cierta medida, de forma que esquemas de
modulación óptima, en cuanto a la minimización de la distorsión, van a ofrecer una pobre
respuesta dinámica.
3.2.
Estrategia de control
Con el control a lazo abierto del motor de inducción a frecuencia variable, se puede obtener
un accionamiento a velocidad variable satisfactorio cuando el motor trabaja a valores
estables del par, sin muchos requerimientos sobre la velocidad. Cuando los requerimientos
del accionamiento necesitan de una respuesta dinámica rápida, de alta exactitud en la
velocidad o de control del par, el control a lazo abierto no brinda esta posibilidad. Es por
eso que se hace necesario operar el motor en lazo cerrado, cuando la operación en régimen
dinámico del accionamiento representa
un papel fundamental en los indicadores del
sistema en el que él es parte.
El par depende igualmente del flujo del entrehierro y de la velocidad del motor, hecho este
que complica el diseño del sistema de control en los motores de inducción, no siendo así en
su contra parte, el motor de CD, donde el conmutador permite un control independiente del
flujo y el par, a costa de la cual restringe la potencia y velocidad del motor, aumenta la
inercia, la longitud axial y necesita mantenimiento periódico. Con los motores de alterna,
alimentados con convertidores de frecuencia, el conmutador es eliminado, a un
considerable costo y complejidad, sin embargo, han sido propuestas varias técnicas de
control de la velocidad del motor de inducción.
Estas estrategias se pueden clasificar en dos categorías: el control escalar y el control
vectorial.
3.2.1. Control escalar
Con este método la tensión de alimentación evoluciona proporcionalmente a la frecuencia.
Cuando V/f es constante el motor funciona de forma aproximada con flujo constante en los
regímenes permanentes. Este tipo de control es más fácil de llevar a la práctica en un
convertidor y se suele emplear cuando los requisitos de regulación son de baja velocidad.
La proporcionalidad V/f desaparece en las bajas frecuencias, además la característica de la
curva de par depende también de la frecuencia del rotor y de su temperatura, por lo que el
dispositivo de control del convertidor ha de incluir las correspondientes correcciones.
En los convertidores con este tipo de control, una de las parametrizaciones más importante
es la selección o ajuste de la curva V/f. Algunos convertidores traen varias curvas ya
ajustadas en su programación. Para seleccionar la curva adecuada se debe tener en cuenta
las características de tensión y frecuencia del motor y la velocidad máxima a la que puede
girar el rotor. [3.]
Esta estrategia de control se puede lograr de dos formas:
1- Control Voltaje – Frecuencia (V/F). (Volt/Hertz Control)
2- Control de la corriente del estator y de la frecuencia del deslizamiento (Control
del Deslizamiento o Slip Control)
3.2.1.1.
Control voltaje – frecuencia (V/f)
Para generar la mayor posible relación de par por ampere en la corriente del estator, y de
aquí la mejor utilización posible de la capacidad de corriente disponible del accionamiento,
el flujo debe permanecer constante y cercano a su valor nominal aún cuando las
condiciones de operación varíen. Para lograr trabajar a flujo constante se puede ajustar,
para cada condición de operación, dos parámetros controlables, que son la amplitud y
frecuencia del voltaje de alimentación.
Un simple esquema de Control Voltaje – Frecuencia (Volt/Hertz), también conocido como
V/F, se muestra en la figura 3.1. En este tipo de control la relación entre la magnitud del
voltaje y la frecuencia se conoce como ley de mando. Los primeros convertidores que
utilizaron esta técnica sólo permitían un margen muy limitado de velocidades porque al
mantener constante la relación V/F no se ha tenido en cuenta que los devanados también
tienen resistencia óhmica, que no varía con la frecuencia.
El resultado es que a bajas frecuencias disminuye el par. Una posible solución es aumentar
un poco más la tensión a frecuencias bajas, o aumentarla en proporción al consumo y la
resistencia de los devanados. En los ventiladores y las bombas centrífugas apenas se
necesita para bajas velocidades y lo que suele hacerse es reducir más la tensión para
consumir menos energía.
Muchos inversores permiten seleccionar la relación entre la tensión y la frecuencia según
sea la carga mecánica.
Figura 3.1. Control de Velocidad V/F con Regulación de la Frecuencia del Deslizamiento
Las técnicas de control V/F están basadas en los modelos estáticos del motor de inducción
para la operación a flujo constante.
3.2.1.2.
Control del deslizamiento
Un típico sistema de control de un motor de inducción alimentado por un inversor regulado
por corriente se muestra en la figura 3.2. En esta técnica de regulación las referencias
trifásicas de corriente, son comparadas con los valores instantáneos de las corrientes del
motor. El error en la entrada a los Reguladores de Corriente y Generación de PWM.
La amplitud de las referencias de corrientes se obtienen del bloque Generador de Funciones
y la frecuencia se obtiene de la adición de la señal de frecuencia del rotor, que se obtiene
mediante la medición de la velocidad con un encoder y la señal de la frecuencia del
deslizamiento. La frecuencia del deslizamiento se obtiene de la salida del regulador de
velocidad o de una tabla con los valores optimizados del deslizamiento, en el caso de
accionamientos con control del par.
Los Reguladores de Corriente y Generación de PWM pueden ser reguladores histerésicos o
reguladores proporcionales integrales (PI) con comparación con rampa (método
suboscilatorio), aunque también se pueden utilizar otras técnicas de regulación. Este lazo
intermedio de corriente, que usualmente debe tener un ancho de banda grande, hace que el
inversor se comporte como fuente de corriente, siendo la técnica de modulación PWM
utilizada en los convertidores por voltaje. En este caso se dice que el inversor está
trabajando en modo de control de corriente (Current Control Mode o simplemente CCM),
también se conoce con el nombre de inversor PWM regulado por corriente (Current
Regulated Pulse Width Modulation o simplemente CRPWM).
Figura 3.2. Inversor CRPWM con control de la frecuencia del deslizamiento. [3.]
3.2.2. Control vectorial
Esta estrategia se puede alcanzar mediante tres técnicas.
1- Control por Campo Orientado (FOC):
•
Método Indirecto.
•
Método Directo.
2- Control sin sensor (Sensorless Control)
3- Control Directo del Par (Direct Torque Control o DTC).
3.2.2.1.
Control por campo orientado (FOC)
El Control Vectorial por Campo Orientado, este nombre genérico se le da al caso de cuando
la orientación del flujo es el flujo del rotor. De hecho, el sistema de Control Vectorial puede
estar orientado al flujo del estator o también al flujo del entrehierro.
Las técnicas de control vectorial han hecho posible la aplicación de motores de inducción
en aplicaciones de altas prestaciones donde solamente se podían lograr, hasta entonces, con
motores de corriente directa. Los esquemas de control vectorial permiten controlar el motor
de inducción de la misma manera que el motor de corriente directa de excitación
independiente. Como en el motor de CD, se logra un control independiente del flujo y el
par (por lo que el control vectorial se conoce también como control desacoplado). El
control de este último se logra regulando la componente de la corriente que tiene que ver
con el par (iqs) y el del flujo, controlando (ids).
•
El método directo, la generación del vector de corriente depende de las señales de
flujo del estator o del entrehierro. El flujo del entrehierro puede ser medido
directamente (sensores de efecto Hall) o estimado mediante los valores de voltaje
y corrientes del estator. Las componentes del flujo del estator pueden ser
directamente calculadas a través de sus magnitudes. En este método, la velocidad
del rotor no es un requerimiento para obtener la información del ángulo espacial
del campo o flujo del rotor (este ángulo también se conoce como ángulo de
desacoplo).
•
El método indirecto, es más simple de implementar debido a que se prescinde de
medir o estimar el vector de flujo. El vector de la corriente se calcula con la
medición de la velocidad del rotor y el valor de las referencias de flujo y par (con
las cuales se determina la frecuencia del deslizamiento).
3.2.2.2.
Control sin sensores (Sensorless)
Los esquemas de control requieren sensar la velocidad para su operación a lazo cerrado. El
sensor de velocidad posee varios inconvenientes desde el punto de vista de costo,
confiabilidad e inmunidad al ruido. Actualmente han sido propuestos varios métodos para
la estimación de la velocidad, utilizando voltaje, corrientes y frecuencia del estator.
Se pueden clasificar de la siguiente manera.
•
Estimación basada en el modelo de la máquina
•
Estimación del flujo del estator
•
Estimación basada en los efectos parásitos
3.2.2.3.
Control directo del par (DTC)
La principal diferencia con los otros métodos de control anteriores es que en el Control
Directo del Par, o simplemente DTC, no existe un modulador PWM separado, sino que la
posición de los interruptores del convertidor de potencia es determinada directamente por el
estado electromagnético del motor. Para ello, es necesario disponer de un modelo muy
exacto del motor junto con una elevadísima capacidad de cálculo.
El DTC permite una respuesta dinámica mucho más rápida, que inclusive puede llegar a
duplicar las prestaciones de los esquemas de control vectorial anteriores.
Para determinar la secuencia de conmutación del inversor, el DTC utiliza las últimas
tecnologías de los microprocesadores, los procesadores digitales de señales (DSP),
conjuntamente con circuitos de propósitos específicos (ASIC). Todas las señales de control
se transmiten por fibra óptica para conseguir elevadas velocidades de transmisión.
3.3.
El transistor de potencia
El desarrollo de los dispositivos de potencia ha posibilitado que los convertidores de
frecuencia se utilicen con mayor frecuencia en nuestros días. El avance de estos
dispositivos ha determinado el desarrollo evolutivo de los convertidores.
El funcionamiento y utilización de los transistores de potencia es idéntico al de los
transistores normales, teniendo como características especiales las altas tensiones e
intensidades que tienen que soportar y, por lo tanto, as altas potencias a disparar.
Algunos de los tipos de transistores de potencia
•
Bipolar.
•
Unipolar o FET (Transistor d Efecto Campo).
•
IGBT.
PARÁMETROS
Impedancia de entrada
MOS
BIPOLAR
Alta (1010 ohmios) Media (104 ohmios)
Ganancia en corriente
Alta (107)
Media (10-100)
Resistencia ON (saturación)
Media / alta
Baja
Resistencia OFF (corte)
Alta
Alta
Voltaje aplicable
Alto (1000 V)
Alto (1200 V)
Máxima temperatura de operación
Alta (200ºC)
Media (150ºC)
Frecuencia de trabajo
Alta (100-500 Khz)
Baja (10-80 Khz)
Coste
Alto
Medio
Tabla 3.1. comparación de parámetros MOS – BIPOLAR. [10.]
Los IGBT ofrecen a los usuarios las ventajas de entradas MOS, mas la capacidad de carga
en corriente de los transistores bipolares.
•
Trabaja con tensión.
•
Tiempos de conmutación bajos.
•
Disipación mucho mayor (como los bipolares).
Nos interesa que el transistor se parezca, lo más posible, a un elemento ideal:
•
Pequeñas fugas.
•
Alta potencia.
•
Bajos tiempos de respuesta ( t on , t off ), para conseguir una alta frecuencia de
funcionamiento.
•
Alta concentración de intensidad por unidad de superficie del semiconductor.
•
Que el efecto avalancha se produzca a un valor elevado ( VCE máxima elevada).
•
Que no se produzcan puntos calientes (grandes di/dt ).
Una limitación importante de todos los dispositivos de potencia y concretamente de los
transistores bipolares, es que el paso de bloqueo a conducción y viceversa no se hace
instantáneamente, sino que siempre hay un retardo ( t on , t off ). Las causas fundamentales de
estos retardos son las capacidades asociadas a las uniones colector - base y base - emisor y
los tiempos de difusión y recombinación de los portadores.
Figura 3.3. Símbolo del Transistor IGBT Canal N
3.3.1. Principio de funcionamiento de los transistores de potencia
La diferencia entre un transistor bipolar y un transistor unipolar o FET es el modo de
actuación sobre el terminal de control. En el transistor bipolar hay que inyectar una
corriente de base para regular la corriente de colector, mientras que en el FET el control se
hace mediante la aplicación de una tensión entre puerta y fuente. Esta diferencia viene
determinada por la estructura interna de ambos dispositivos, que son substancialmente
distintas. Es una característica común, sin embargo, el hecho de que la potencia que
consume el terminal de control (base o puerta) es siempre más pequeña que la potencia
manejada en los otros dos terminales.
En resumen, destacamos tres cosas fundamentales:
•
En un transistor bipolar IB controla la magnitud de IC.
•
En un FET, la tensión VGS controla la corriente ID.
•
En ambos casos, con una potencia pequeña puede controlarse otra bastante mayor.
3.3.2. Generalidades de los transistores de potencia
Para vencer las limitaciones de los dos interruptores de potencia, descritos anteriormente, se
realiza una integración de sus ventajas: capacidad de corriente de colector (característica
del transistor bipolar) y control por tensión aplicada entre GATE y emisor (característica
del MOSFET de potencia), para constituir el dispositivo de potencia híbrido, denominado
transistor IGBT (Insulated GATE Bipolar Transistor). Este dispositivo pertenece a la
familia de dispositivos MOS, siendo actualmente el más avanzado en tecnología disponible
y el más utilizado comercialmente por las características que se exponen a continuación:
•
Control por tensión: La entrada en conducción y en bloqueo del dispositivo es
controlada aplicando tensión entre GATE y emisor. La característica de entrada es
idéntica al MOSFET de potencia, su elevada impedancia de entrada denota
simplicidad para el circuito de mando implicando bajos costos.
•
Bajas pérdidas de conducción: El canal del IGBT, en estado de conducción, es
considerablemente menos resistivo por el hecho de tener un substrato P junto al
colector, responsable de la inyección de los portadores minoritarios (lagunas) en
la capa resistiva del canal (N-base). El flujo de corriente de colector es dado por
los portadores minoritarios.
•
Elevada capacidad de corriente de colector: Por el hecho de presentar una
característica de salida idéntica al transistor bipolar de potencia, el dispositivo
posee una elevada capacidad de conducción de corriente de colector (centenas de
amperes).
•
Operación con tensiones elevadas: Con el incremento de la espesura de las capas
de substrato N-base es posible alcanzar tensiones de operación por encima de los
1000V, sin ocurrir un incremento de la resistencia del canal, hecho este que
acontece en el MOSFET de potencia.
•
No presenta problemas de segunda avalancha: el dispositivo puede soportar
simultáneamente elevadas tensiones y corrientes de corta duración, sin presentar
problemas de destrucción por el fenómeno de segunda avalancha.
•
Operación en alta frecuencia: es posible operar el interruptor hasta 200 Khz. en
condiciones de conmutación no disipativa. En condiciones de conmutación
disipativa, el IGBT puede operar en frecuencia hasta 25 KHz. Debido a las
pérdidas de conmutación por la presencia de corriente de fuga, que ocurre en la
transición del estado de conducción a bloqueo, el rango de frecuencia de
operación del transistor dependerá de las condiciones de conmutación (Hard
Commutation or Soft Commutation).
Por naturaleza, los IGBT son más rápidos que los transistores bipolares de potencia (BJT),
por no presentar el problema del tiempo de almacenamiento, pero son menos rápidos que
los transistores MOSFET de potencia.
CARACTERÍSTICA
MOSFET
IGBT
BIPOLAR
Parámetro de Mando
Voltaje
Voltaje
Corriente
Potencia del circuito de
mando
Mínima
Mínima
Elevada
Simple
Compleja
(Elevadas corrientes de
base positivas y
negativas)
Complejidad del
circuito de mando
Simple
Densidad de corriente
Pérdidas por
conmutación
Elevada en bajo voltaje
Baja en alto voltaje
Muy elevada
Media
Pequeño compromiso con Gran compromiso con los
los tiempos de
tiempos de conmutación
conmutación
Muy bajas
Entre bajas y medias
De medias para altas
Depende del compromiso Depende del compromiso
con las pérdidas de
con las pérdidas de
conmutación
conmutación
Tabla 3.2. Comparación de las Características de los transistores. [3.]
CAPÍTULO 4
CRITERIOS PARA EL DISEÑO
4.1.
Convertidor de frecuencia
Un convertidor de frecuencia tiene como función cambiar una tensión de entrada de
corriente alterna con una magnitud y frecuencia fija, en una tensión simétrica de salida en
corriente alterna, con amplitud y frecuencia deseadas. Hay una etapa intermedia de
rectificación a corriente continua de la entrada, para después ondular a las magnitudes
deseadas.
Figura 4.1. Esquema de un Convertidor de Frecuencia.
4.2.
Criterios de selección
•
El control escalar es la estrategia de control a utilizar por que con este método la
tensión de alimentación evoluciona proporcionalmente a la frecuencia,
manteniendo así el flujo constante. También por que el motor a regular es de una
baja potencia
•
La modulación a utilizar es la modulación PWM regular por que nos brinda unas
ventajas al utilizarla con técnicas a digitales.
•
El control escalar y la modulación PWM regular serán optimizados en el DSP
56f801 de Motorola el cual nos ayuda con las características y ventajas que posee
frente a un PIC.
•
Los patrones de la señal PWM de salida se obtendrán de la simulación en el
software OrCAD Capture PSpice, evitando así conflictos en la ejecución del
programa desde el DSP.
•
El número de armónicos de la salida tiene que ser de un valor muy bajo, donde
esta información estará apoyada bajo los resultados obtenidos en la simulación.
4.3.
El DSP (Procesador Digital de Señales)
Es una técnica que convierte señales de fuentes del mundo real (usualmente en forma
analógica), en datos digitales que luego pueden ser analizados. Este análisis es realizado en
forma digital pues una vez que una señal ha sido reducida a valores numéricos discretos,
sus componentes pueden ser aislados, analizados y reordenados más fácilmente que en su
primitiva forma analógica
Un procesador digital de señales es un microprocesador especializado y diseñado
específicamente para procesar señales digitales en tiempo real. Este provee secuencias de
instrucciones ultra-rápidas, como:
•
MAC (multiply-accumulate operations)
•
La habilidad de actuar como un dispositivo de DMA (acceso directo a memoria).
•
Arquitectura de harvard, memoria de programas y memoria de datos separadas.
En su núcleo, un DSP es altamente numérico y repetitivo. A la vez que cada dato llega, éste
debe ser multiplicado, sumado y además de eso transformado de acuerdo a fórmulas
complejas. Lo que permite realizar todo ello es la velocidad del dispositivo. Los sistemas
basados en DSP's deben trabajar en tiempo real, capturando y procesando información a la
vez que ocurre.
4.3.1. Características básicas de un DSP
Una de las más importantes características de un DSP es su capacidad de realizar
operaciones de multiplicación y acumulación (MACs) en sólo un ciclo de reloj. No obstante
ello, es necesario que el dispositivo posea la característica de manejar aplicaciones críticas
en tiempo real. Esto requiere de una arquitectura que soporte un flujo de datos a alta
velocidad hacia y desde la unidad de cálculo y memoria. Esta ejecución a menudo requiere
el uso de unidades DMA (Direct Memory Acess) y generadores de direcciones duales
(DAG's) que operan en paralelo con otras partes del chip.
Los DGA's realizan los cálculos de direcciones, permitiendo al DSP buscar dos datos
distintos para operar con ellos en un sólo ciclo de reloj, de tal forma que es posible ejecutar
algoritmos complejos en tiempo real.
Los DSP's deben manejar rangos dinámicos extendidos y de precisión para evitar overflow
y underflow y para minimizar los errores de redondeo. Para acomodarse a esta capacidad,
los DSP's incluyen acumuladores dedicados con registros más anchos que el tamaño
nominal de los datos para así conservar la precisión (por ejemplo, DSP's de 16 bits poseen
acumuladores de 32 bits para manejar el resultado de las multiplicaciones) necesario volver
al inicio de éste sin demorar así la ejecución del algoritmo a causa de la ejecución de
instrucciones adicionales de comparación y salto.
Por otro lado, los microcontroladores se utilizan sobre todo en aplicaciones donde existen
acontecimientos externos los que requieren de la detección y el control. El ambiente
externo es detectado por cualquiera de los dispositivos periféricos; puertos digitales I/O,
pines dedicados de interrupción, o las entradas análogas (de analógico a digital). La fuente
de las señales a estos pines viene de los interruptores, sensores análogos y/o digitales, y de
las señales de estado de otros sistemas. Cada entrada representa un pedazo de información
sobre el estado de un cierto acontecimiento exterior. Las salidas se envían a actuadores,
relays, motores o a otros dispositivos que controlen acontecimientos. Entre la detección y
actuación está el microcontrolador, analizando las entradas y el estado actual del sistema,
determinando cuándo y qué encender y/o apagar. El software es el que hace todo esto, toma
las decisiones, generalmente trabaja de una manera condicional; es decir, realiza saltos sólo
bajo ciertas condiciones y realiza manipulaciones a nivel de bits. Las interrupciones son
consideradas como condiciones externas que alteran el flujo principal del programa.
4.3.2. Diferencias entre microcontroladores y DSP
Una de las diferencias más importante encontrada entre un DSP y un Microcontrolador es
la estructura de memoria que poseen. En un microcontrolador es posible encontrar una
memoria lineal, en la que se almacenan tanto datos como instrucciones de programa. Esto
obliga a generar programas que no sobrepasen límites de tamaño ya que podrían
sobrescribirse datos por instrucciones o viceversa. Un DSP posee dos bloques separados e
independientes de memoria, cada uno con su propio bus de acceso, permitiendo así al
procesador ir a buscar la siguiente instrucción y dato en el mismo ciclo de reloj (Fetch).
Otra diferencia importante entre un Microcontrolador y un DSP (y aún entre DSP's) es la
cantidad de unidades de ejecución que poseen, las cuales son capaces de realizar
operaciones en paralelo. Por ejemplo, además de la típica ALU, un DSP posee bloques
MAC de multiplicación y acumulación, se encuentran también bloques sólo para
corrimientos, shifters.
Cabe destacar que en la actualidad cada vez se empieza a desarrollar más la tecnología
mezclada entre microprocesadores y DSP's. Diversas son las razones para que se produzca
esta integración, sin embargo a groso modo es posible identificar una en particular. Los
requerimientos de control en tiempo real bajo condiciones cada vez más exigentes en
cuanto a necesidad de cálculo han llevado a los fabricantes de microcontroladores
(microchip, ST, etc.) a integrar a sus microprocesadores características de DSP (unidades
de cálculo paralelas, pipeling, etc.) y por el otro lado los fabricantes de DSP's (Texas,
Motorola,
Analog
Device,
etc.)
empiezan
a
utilizar
las
características
de
Microcontroladores (Conversores A/D, puertos digitales I/O, bloques PWM) integrándolas
dentro del DSP.
4.4.
Descripción del dispositivo
El diseño propuesto del control escalar para el convertidor de frecuencia esta conformado
principalmente del bloque de modulación y el bloque de control.
SALIDA
CONTROL
DE MANDO
MODULACIÓN
DSP
TRIFÁSICA
VISUALIZACIÓN
Figura 4.2. Diagrama en Bloque del control escalar para el convertidor de frecuencia
La utilización del DSP 56F801 trae una característica en particular muy importante, que es
el uso de un cristal de 80 MHz. donde sus tiempos en el ciclo de maquina son muy bajos el
cual lo convierte en un microprocesador con una alta velocidad de ejecución.
TOS =
1
= 25 nanosegundos.
40MHz
Ciclo de instrucción = 4*Tos = 4* 25 * 10 −9 ns = 100 nanosegundos.
El período de muestreo tm es:
tm =
1
Fout * n
Donde,
Fout : Es la frecuencia deseada de salida
n : El número de pulsos por ciclo de la onda
Por ejemplo si se desea una frecuencia de salida de 60 Hz, y n para este caso es 20. el tm
será:
tm =
1
= 0.8333 *10-3 segundos.
60 * 20
tm
Figura 4.3. Periodo de Muestreo tm.
4.5.
Diseño de las frecuencias a implementar
El sistema constara con tres tipos de frecuencia almacenadas en el DSP, las cuales serán, a
las necesidades requeridas en el momento.
Con ayuda del software OrCAD Capture PSpice, se realizaron los cálculos para las
conmutaciones de la modulación PWM regular los cuales serán programados en el DSP.
El modelo consta de una fuente Vpulse para generar la señal triangular (portadora) a la
frecuencia de conmutación. Esta señal es comparada con la tensión de control (o
modulante) mediante el elemento ETABLE (librería ABM de PSpice). En la salida del
bloque se obtiene un pulso alto cuando el resultado de la diferencia entre ambas es positivo.
Fig. 4.4. uno de los criterios para la selección de la frecuencia de la portadora fue la baja
cantidad de distorsión armónica la cual en la simulación se puede realizar.
4.5.1. Modulación para frecuencia de salida de 60 hz.
f m = 60hz.
f p = 1.2 Khz .
f m : frecuencia de la moduladora
f p : frecuencia de la portadora
Según la ecuación (2.1) tenemos que la razón de modulación es:
n=
1200hz.
60hz.
n = 20
Dado a que su número es grande el contenido de armónicos disminuirá, pero sabemos que n
tiene un límite por motivos ya conocidos y mencionados anteriormente en el capítulo 2.
SEÑAL
DE
CONTROL
E1
SEÑAL
DE
SALIDA
ETABLE
IN+ OUT+
IN- OUTV
VOFF = 0
VAMPL = 10
FREQ = 60
V
V(%IN+, %IN-)
V1
0
0
V1 = -10.1
V2 = 10.1
TD = 0
TR = 0.416ms
TF = 0.416ms
PW = 0.1us
PER = 0.833ms
V
V2
SEÑAL
TRIANGULAR
0
Figura 4.4. Esquema de la Modulación en PSpice. Para obtener una frecuencia de 60 hz.
Figura 4.5. Señal de Salida de la Modulación con Frecuencia de 60 hz.
Análisis de Fourier de la señal de salida se realizo en la simulación arrojándola señal de los
primeros armónicos, Fig. 4.6. Los datos del análisis de Fourier y la distorsión armónica de
la señal, Fig. 4.7. todos estos resultados hacen parte de la modulación a implementar la cual
va a tener una salida de 60 hz.
Figura 4.6. Señal del Análisis de Fourier de la señal de salida.
Figura 4.7. Datos obtenidos del Análisis de Fourier.
Todos estos análisis con sus respectivos resultados, son la base para el diseño del control
escalar y la modulación PWM regular, los cuales serán usados para la implementación.
El dispositivo trabajara con una modulación en zona lineal ya que el valor del índice de
modulación m es menor que la unidad (m <1) entonces se dice que la modulación es lineal,
siendo la amplitud del primer armónico de la onda PWM proporcional a la amplitud de
control.
Según la ecuación (2.2), obtenemos.
m=
5v
5.1v
m = 0.98
m < 1.
El índice de modulación es menor de uno ( 1 ).
Los IGBT’s operan a alta frecuencia es posible operar el interruptor hasta 200 Khz. en
condiciones de conmutación no disipativa. En condiciones de conmutación disipativa, el
IGBT puede operar en frecuencia hasta 25 Khz. Debido a las pérdidas de conmutación por
la presencia de corriente de fuga, que ocurre en la transición del estado de conducción a
bloqueo, el rango de frecuencia de operación del transistor dependerá de las condiciones de
conmutación.
La frecuencia de conmutación en nuestro dispositivo es de 1.2 Khz. Esto no va hacer un
inconveniente para las conmutaciones en el transistor de potencia IGBT’s
4.5.2. Modulación para frecuencia de salida de 55 hz.
f m = 55hz.
f p = 715hz.
f m : frecuencia de la moduladora
f p : frecuencia de la portadora
Según la ecuación (2.1) tenemos que la razón de modulación es:
n=
715hz.
55hz.
n = 13
Se logra disminuir el contenido de armónicos, la razón es de un valor alto y así se obtiene
un gran número de pulsos en la onda fundamental.
SEÑAL
DE
CONTROL
SEÑAL
DE
SALIDA
E1 ETABLE
IN+ OUT+
IN- OUTV
VOFF = 0
VAMPL = 10
FREQ = 55
V
V(%IN+, %IN-)
V1
R1
1k
0
V
0
V1 = -10.1
V2 = 10.1
TD = 0
TR = 0.6993ms
TF = 0.6993ms
PW = 0.1us
PER = 1.3986ms
V2
0
SEÑAL
TRIANGULAR
0
Figura 4.8. Esquema de la modulación en PSpice. Para obtener una frecuencia de 55 hz.
Figura 4.9. Señal de salida de la modulación con frecuencia de 55 hz.
Los datos y análisis de la distorsión armónica y el análisis de Fourier de la señal de salida
se muestran en la siguiente Fig. 4.10. y en la Fig. 4.11. todos estos resultados hacen parte
de la modulación a implementar la cual va a tener una salida de 55 hz.
Figura 4.10. Señal del Análisis de Fourier de la señal de salida.
Figura 4.11. Datos obtenidos del Análisis de Fourier.
El dispositivo trabajara con una modulación en zona lineal ya que el valor del índice de
modulación m es menor que la unidad (m <1) entonces se dice que la modulación es lineal,
siendo la amplitud del primer armónico de la onda PWM proporcional a la amplitud de
control.
Según la ecuación (2.2), obtenemos.
m=
5v
5.1v
m = 0.98
m < 1.
Conociendo el rango de frecuencias de funcionamiento en que pueden conmutar los
IGBT’s, no se encuentra algún problema con ellos y esta modulación, ya que en nuestro
dispositivo la conmutación es de 715 hz.
4.5.3. Modulación para frecuencia de salida de 50 hz.
f m = 50hz.
f p = 950hz.
f m : frecuencia de la moduladora
f p : frecuencia de la portadora
Según la ecuación (2.1) tenemos que la razón de modulación es:
n=
950hz.
50hz.
n = 19
El valor de la razón de modulación tiene un valor alto y es bueno para la cantidad de
armónicos en la señal de salida.
SEÑAL
DE
SALIDA
SEÑAL
DE
CONTROL
E1
ETABLE
IN+ OUT+
IN- OUTV
VOFF = 0
VAMPL = 10
FREQ = 50
V(%IN+, %IN-)
V1
R1
1k
0
0
V1 = -10.1
V2 = 10.1
TD = 0
TR = 0.526ms
TF = 0.526ms
PW = 0.1us
PER = 1.052ms
0
V2
SEÑAL
TRIANGULAR
0
Figura 4.12. Esquema de la modulación en PSpice. Para obtener una frecuencia de 50 hz.
Figura 4.13. Señal de salida de la modulación con frecuencia de 50 hz.
Análisis de la señal la cual se debe tener en cuenta a la hora de implementar tanto su
análisis de Fourier y la distorsión armónica.
Figura 4.14. Señal del Análisis de Fourier de la señal de salida.
Figura 4.15. Datos obtenidos del Análisis de Fourier.
El dispositivo trabajara con una modulación en zona lineal ya que el valor del índice de
modulación m es menor que la unidad (m <1) entonces se dice que la modulación es lineal,
siendo la amplitud del primer armónico de la onda PWM proporcional a la amplitud de
control.
Según la ecuación (2.2), obtenemos.
m=
5v
5.1v
m = 0.98
m < 1.
Conociendo el rango de frecuencias de funcionamiento en que pueden conmutar los
IGBT’s, no se encuentra algún problema con ellos y esta modulación, ya que en nuestro
dispositivo la conmutación es de 950 hz.
4.6.
Desfase de la señal.
Para lograr el desfase de la señal obtenida se podría lograr a 60º o a 120º, donde esta última
fue la implementada a 120º.
Como cada ciclo de la onda tiene 20 pulsos entonces el desfase a 120º se realizaba según el
siguiente calculo.
Desfase =
pulsos
grados
Desfase =
20
360
Desfase = 0,05556 pulsos /grados
Para saber cuantos pulsos es este valor lo multiplicamos por los grados deseados para el
desfase.
#pulsos = 0,05556 Pulsos/grados * 120º = 6,6667 pulsos
Entonces 6,6667 pulsos representan 120º. Lo cual quiere decir, que para poder obtener la
señal de salida se tiene que desplazar 6,6667 pulsos una señal de la otra.
De 0 hasta 60° conducen: G1,G5,G6.
De 60 hasta 120° conducen: G1,G2,G6.
De 120° hasta 180° conducen: G1,G2,G3.
De 180° hasta 240° conducen: G2,G3,G4.
De 240° hasta 300° conducen: G3,G4,G5.
De 300° hasta 360° conducen: G4,G5,G6.
+VDC
G1
G4
G3
G5
G6
G2
(-)
60°
120° 180° 240° 300° 360°
G1
G2
G3
G4
G5
G6
G1
G5
G6
G1
G2
G6
G1
G2
G3
G2
G3
G4
G3
G4
G5
G4
G5
G6
G1
G5
G6
Figura 4.16. Condición de los pulsos.
4.7.
Tiempo de conmutación de los IGBT’s
El mayor problema que presenta el diseño de circuitos inversores es la generación de
armónicos por efecto de la conmutación. Con la modulación PWM se puede reducir el
contenido de armónicos en la salida de un inversor, y esto consiste en producir una tensión
configurada de varios pulsos por cada ciclo de una señal alterna deseada. La señal así
obtenida tiene un contenido armónico que resulta menor cuando mayor la cantidad de
conmutaciones producidas.
Estas cantidades de conmutaciones se pueden realizar con los IGBT’s, que en operaciones a
altas frecuencias pueden operar en condiciones de conmutación no disipativa hasta en 200
Khz. y en conmutación disipativa puede operar en frecuencias de hasta 25 Khz.
Si nuestro dispositivo trabaja con una conmutación no disipativa, entonces:
T=
1
f
T=
1
200 Khz.
T = 5 *10 −6 s
Si nuestro dispositivo trabaja con una conmutación disipativa, entonces:
T=
1
f
T=
1
25Khz.
T = 40 *10 −6 s
Con estos tiempos de conmutación no tendríamos problemas con los pulsos que llegarían a
los IGBT’s para poder activarlos o desactivarlos para sus conmutaciones.
4.8.
Control pwm unipolar
Esta señal la observara a la salida del puente rectificador, en caso de que el sistema en un
futuro sea culminado.
Cuando la señal de salida de un puente inversor, conmuta entre +Vin y 0 durante los
semiciclos positivos, y también este conmutando entre 0 y –Vin para los semiciclos
negativos. El tipo de control recibe el nombre de control PWM unipolar.
En la Fig. 4.16. se puede observar el circuito de potencia junto a la modulación PWM. Se
observa que la salida es monofásica, en el puente rectificador. En la Fig. 4.17. se observa la
salida unipolar del puente rectificador monofásico.
E1
IN+ OUT+
IN- OUTETABLE
V(%IN+, %IN-)
V8
VOFF = 0
VAMPL = 10
FREQ = 60
M1
V5
170Vdc
M4
BRAD1
BRAD2
MbreakN
MbreakN
0
V1 = 10.5
0 V2 = 0
V3
TD = 0
TF = 0.416ms
TR = 0.416ms
PW = 0.1us
PER = 0.8333ms
0
0
V+
M2
E2
V9
VOFF = 0
VAMPL = 10
FREQ = 60
0
V1 = 0
V2 = 10.5
V4
TD = 0
TF = 0.416ms
TR = 0.416ms
PW = 0.1us
PER = 0.8333ms 0
V-
BRAD2
IN+ OUT+
IN- OUTETABLE
V(%IN+, %IN-)
M3
BRAD1
MbreakN
MbreakN
0
0
Figura 4.17. Diagrama de la etapa de potencia. (60 Hz.)
Figura 4.18. Salida unipolar del Puente Rectificador. (60 Hz.)
4.9.
Manual de operación de usuario
Con este manual trataremos de darle más facilidad al operador al momento de manipular
este sistema.
4.9.1. Control de mando
Esta parte es la interfase entre el usuario y el hardware, se realiza de manera tangible.
Desde este punto se podrá manipular la relación voltaje – frecuencia, según sea necesario o
lo ameriten los parámetros del motor.
Según los datos almacenados en el DSP, en nuestro caso son tres los tipos de señal que el
usuario podría manipular:
•
60 hz.
•
55 hz.
•
50 hz.
4.9.2. Visualización
Es una interfase grafica donde se observaran los datos que el usuario elija.
Esta visualización, es el indicador de la frecuencia que el operador seleccione según la
necesidad.
4.9.3. Especificaciones del sistema
Las especificaciones finales del sistema se observan en la siguiente tabla
TENSIÓN DE ENTRADA
3.5 V DC
RANGO DE VOLTAJE DE SALIDA
0 – 3.5 V DC
SEÑAL DE CONTROL ANALÓGICA
0 – 20 mA.
RANGO DE FRECUENCIA DE SALIDA
50 hz. – 55 hz. – 60 hz.
PESO
150 grs.
DIMENSIONES (L x A x H)
12 x 12 cms
VARIACIONES DE VOLTAJE
±10 %
VARIACIONES MÍNIMAS DE
±5 %
FRECUENCIA
Visualización
INTERFACE
Potenciómetro
MODELO
MR 1.0
TEMPERATURA
-40° A 70°
Figura 4.19. Especificaciones del Sistema.
4.9.4. Precauciones
•
Recuerde que la máxima tensión aplicada en el conector de alimentación es de
3.5 Voltios.
•
La variación del control de mando se debe realizar con la mejor suavidad posible.
•
Las salidas de la modulación son de baja tensión pero debe tratar de no unir
ninguna de estas salidas, podría causar el daño del sistema.
•
Antes de dar funcionamiento al sistema, debe realizar una revisión en la chapa del
motor y leer las especificaciones y saber si esta modulación pudiese llegara
servirle.
ANÁLISIS ECONÓMICO
El proyecto en esta ciclo es una etapa de investigación concreta, en la parte de motores de
inducción, tiempos de conmutación de los transistores de potencia, modulación de un
convertidor de frecuencia, para que en un futuro cercano se logre llegar a su total
implementación, aprovechando este sistema ya que esta montado de una forma universal.
El costo de este sistema esta alrededor de los $600.000 por su gran tecnología
implementada como lo es el DSP, que es un dispositivo de grandes ventajas
DESCRIPCIÓN
VALOR
Web para solicitud de información
$ 40.000
Fotocopias
$ 20.000
Impresiones
$ 80.000
Implementación
$ 200.000
Transporte
$ 50.000
Mano de Obra
$ 200.000
Imprevistos
$ 50.000
TOTAL:
$640.000
MARCO LEGAL
En el diseño e implementación del controlador escalar para un convertidor de frecuencia
utilizando la técnica de modulación PWM Regular, se utilizaron como herramientas de
desarrollo OrCAD CAPTURE “PSPICE” versión demo, que es distribuida gratuitamente
por Internet, y el software CODE WARRIOR DEMO también de distribución gratuita.
Desde el punto de vista legal, el control escalar para un convertidor de frecuencia con
modulación PWM regular, para regular la velocidad de motores de inducción, se encuentra
libre de requisitos que comprometan la propiedad intelectual y material del equipo. La cual
en este caso, sólo le corresponde al autor y a la Universidad de Pamplona.
PROTECCIÓN E HIGIENE DEL TRABAJO
Este dispositivo tiene como voltaje de salida una cantidad entre 0 – 5 voltios y una corriente
no mayor a los 20 mA, así que es nulo el peligro a descargas eléctricas al personal que lo
manipule.
Es necesario que dispositivo reciba de un mantenimiento preventivo, para no llegar a
afectar su vida útil y afecte a otros dispositivos que se encuentren trabajando con el sistema.
Este dispositivo no contiene componentes que tengan que ser intercambiados
frecuentemente, y tampoco retornan alguna carga a la red. También se puede decir que el
dispositivo no arroja ningún olor, chispa, ruido o algún factor desagradable que pueda
afectar a otros dispositivos a usuario.
IMPACTO AMBIENTAL
Uno de los problemas a la hora e diseñar algo, es el daño que se le pueda causar al medio
pero nuestro diseño no tiene ninguna objeción frente a estos tipos de problemas, de lo
contrario da soluciones concretas a problemas específicos.
En el diseño del sistema físico se utilizaron materiales que no fueran nocivos al medio
ambiente ni a los seres humanos, tampoco generan desechos de ningún tipo que afecten al
medio ambiente
CONCLUSIONES
La elección del controlador (56f801) DSP de Motorola, jugó un papel importante en la
realización del proyecto, debido a sus altas capacidades y velocidad en la ejecución de
procesos entre otras características y además crea una pauta para estudiar estos DSP en
concreto para mejores aplicaciones en la parte de la electrónica digital.
Este proyecto permite realizar un uso más eficiente y racional de la energía eléctrica y de
los recursos naturales.
Se demuestra que las técnicas de modulación PWM se han tomado el mercado de los
convertidores de frecuencia en todo el mundo, y nosotros en la Universidad de Pamplona
nos estamos colocando en la vanguardia de las nuevas tecnologías de implementación en el
mundo entero.
La simulación nos demuestra que tienen un papel importante en el momento de diseñar
algún dispositivo, por que nos ayuda a encontrar los errores en dicha simulación antes de
verlos en la realidad.
La ayuda de la simulación fue muy buena al momento de evitarle tanto trabajo al DSP al
procesar el algoritmo y así no afectara en la eficiencia del proceso de la ejecución del
mismo.
RECOMENDACIONES
Con la experiencia adquirida al realizar el trabajo y los estudios adquiridos durante la
carrera y el diplomado realizado se puede continuar con la culminación del convertidor de
frecuencia y no solo eso sino que también se puede implementar un mejor control como lo
es el vectorial.
BIBLIOGRAFÍA
[1.]
Díaz, J. L., Control Por Campo Orientado Del Motor De Inducción Con
Adaptación De Los Parámetros Por Medio De Referencia, Tesis de Maestría,
UCLV, Santa Clara, Cuba, 2000.
[2.]
Díaz, J. L., Simulación De Sistemas De Accionamiento Eléctrico, Trabajo De
Diploma, Universidad De Camagüey, Camagüey. Cuba. 1996.
[3.]
Pardo G., A. y Díaz R., J. L. Aplicación De Los Convertidores De Frecuencia.
Estrategias De Control. Universidad de Pamplona, Colombia, 2004.
[4.]
Pardo G., A. y Díaz R., J. L.. Fundamentos De Sistemas De Control
Automático. Universidad de Pamplona, Colombia, 2004.
[5.]
Muhammad H. Rashid, Power Electronics, México, Prentice Hall, 1993.
[6.]
Álvarez López Ramón, Diseño E Implementación De Un Controlador De
Estado Sólido Didáctico Para Regular La Velocidad De Motores Asincrónicos
De Fase Dividida. Universidad de Pamplona, Colombia, 2004.
REFERENCIAS DE INTERNET
[7.]
www.dliengineering.com
[8.]
www.abb.com
[9.]
www.datasheetcatalog.com
[10.]
www.redeya.com
ANEXOS.
A.
Datos prácticos de laboratorio
En la práctica realizada se tomaron las señales de salida de un puente rectificador
monofásico con un osciloscopio, donde se gráfico su frecuencia y su voltaje de salida.
En los datos se observan las señales a la salida en un puente monofásico, Fig. A.1. señal de
salida discreta de la modulación después de pasar por un rectificador monofásico, la
frecuencia de salida es de 1.28 Khz. y su amplitud de salida es de 4.70 V.
Figura A.1. Señal de Salida discreta.
También podemos observar la salida de la señal después de pasar por un filtro, la frecuencia
de 60 Hz. Y un voltaje de 4.70 V.
Figura A.2. Señal de Salida de 60 Hz.
Lograr el desfase de la señal se obtuvo con el desplazamiento de una señal de la otra con un
tiempo correspondiente a 120º y a 240º, en la fig. A.3. se muestra el desfase a 120º.
Figura A.3. Señal de Salida de 60 Hz desfasada 120º.
La fig. A.4. se muestra el desfase de 240º de las señales.
Figura A.4. Señal de Salida de 60 Hz desfasada 240º o -120º.
Figura A.5. Tarjeta del DSP.
B.
Diagrama de flujo del algoritmo de implementación en el DSP
INICIO
Configuración de pines para las salidas por PORB
TRISB = 0
Configuración de puertos para CONTROL DE MANDO
TRISA = 0
CONFIGURACION DEL PUERTO DE SALIDA PWM
Regular
TRISB <= 0; Salida
PORTB,0 = FASE1
PORTB,1 = FASE2
PORTB,2 = FASE3
CONFIGURACION DEL PUERTO DE SALIDA PARA
VISUALIZAR
PORTB,3 = 50 Hz.
PORTB,4 = 55 Hz.
PORTB,5 = 60Hz.
ACTIVAR EL CONVERSOR
AN0 IN DATO
NO
REGRESA
CONVERTIR
SI
COMPARAR
COMPARAR
REGRESA
ADCA_ADSTAT =
(>=10<=35)
SI
PUNTERO <=
TABLA 50 HZ
NO
ADCA_ADSTAT =
(>=45<=70)
SI
PUNTERO <=
TABLA 55 HZ
NO
SI
ADCA_ADSTAT =
(>=80<=105)
PUNTERO <=
TABLA 650 HZ
NO
CONVERTIR
C.
Hoja característica del DSP 56f801
Controlador híbrido 56f801 [9.].
•
Up to 30 MIPS operation at 60MHz core frequency
•
Up to 40 MIPS operation at 80MHz core frequency
•
DSP and MCU functionality in a unified, C-efficient architecture
•
MCU-friendly instruction set supports both DSP and controller functions: MAC,
bit manipulation unit, 14 addressing modes
•
Hardware DO and REP loops
•
6-channel PWM Module
•
Two 4-channel, 12-bit ADCs
•
Serial Communications Interface (SCI)
•
8K × 16-bit words Program Flash
•
1K × 16-bit words Program RAM
•
2K × 16-bit words Data Flash
•
1K × 16-bit words Data RAM
•
2K × 16-bit words Boot Flash
•
Serial Peripheral Interface (SPI)
•
General Purpose Quad Timer
•
JTAG/OnCETM port for debugging
•
On-chip relaxation oscillator
•
11 shared GPIO
•
ç48-pin LQFP Package
Figura A.5. Diagrama en Bloques del DSP 56f801.
D.
Convertidores de frecuencia
Unos de los convertidores que se encuentran en el mercado de la marca ABB son [8.]:
Convertidor ACS 600
Figura A.6. Aspecto exterior del ACS 600
El ACS 600 es un accionamiento nuevo en su generación, es uno de los últimos
convertidores de frecuencia que logra un preciso control del motor de corriente alterna. Ha
sido el primer accionamiento de CA en utilizar la tecnología DTC, los ACS 600 están
dispuestos para con precisión controlar la velocidad y el par de cualquier motor de jaula de
ardilla para baja tensión.
Como decíamos anteriormente los ACS 600 satisfacen las necesidades de cualquier
aplicación, del más simple al más crítico caso de control.
A continuación les mencionamos algunas de sus más generales aplicaciones:
•
Bombas y centrífugas.
•
Ventiladores de tiro forzado y tiro inducido
•
Mezcladores.
•
Líneas de embotelladoras y otras aplicaciones en elaboraciones de productos
alimenticios.
•
Grúas, elevadores, extrusoras.
Convertidor ACS 1000
Figura A.7. Aspecto exterior del ACS 1000
El convertidor, que ha sido diseñado para potencias de 315 a 5000 Kw. y tensiones de 2.3
KV, 3.3 KV y 4.16 KV, ofrece ventajas como la mayor rapidez de entrega, menores costes
de adquisición y mayor fiabilidad. En el pasado, los convertidores para aplicaciones de
media tensión en el rango de 2.3 KV a 6.9 KV, tenían que fabricarse según las
especificaciones del cliente con el fin de satisfacer los requisitos de regulación de velocidad
del motor. En respuesta a la demanda del mercado, ABB Industrie ha desarrollado una
nueva generación de convertidores de CA, denominados ACS 1000, como producto
estándar para aplicaciones de media tensión en numerosas industrias, especialmente para
las industrias del cemento, del petróleo y gas, del agua y aguas residuales, de la minería y la
química, así como para la producción de energía eléctrica.
Esta nueva generación de convertidores ha sido concebida para la gama de potencias de 315
a 5000 Kw. y voltajes 2.3, 3.3 y 4.16 KV. La incorporación de innovaciones tecnológicas
especialmente en el campo de los semiconductores de potencia ha permitido construir los
convertidores de ACS 1000 de forma muy compacta. Al seleccionar un convertidor de CA
de media tensión el cliente tiene que considerar determinados problemas potenciales
relacionados con:
•
Las condiciones en el lado de alimentación.
•
La variación de velocidad.
•
El motor.