Identificación de Sistemas No Lineales - FCEIA
Anuncio

Identificación de Sistemas No Lineales
Juan Carlos Gómez
Identificación de Sistemas
Departamento de Electrónica, FCEIA
Universidad Nacional de Rosario
ISIS -Identificación de Sistemas No Lineales - Juan Carlos Gómez
-1-
Contenido
1. Introducción
2. Modelos No Lineales
3. Algunas Técnicas de Identificación de Modelos Hammerstein-Wiener
ISIS -Identificación de Sistemas No Lineales - Juan Carlos Gómez
-2-
Introducción
• La mayoría de los sistemas tienen un comportamiento no lineal, excepto en
un determinado rango de operación donde pueden ser considerados lineales.
• Modelos Lineales aproximan al sistema no lineal alrededor de un punto de
operación.
• La performance del modelo lineal (i.e., sus características predictivas) se ven
deterioradas al variar el punto de operación del sistema no lineal.
• Para describir globalmente el comportamiento del sistema se debe recurrir a
Modelos No Lineales.
ISIS -Identificación de Sistemas No Lineales - Juan Carlos Gómez
-3-
• La gran variedad de modelos no lineales hace que no sea posible obtener
métodos generales de identificación, sino sólo para determinadas clases de
modelos no lineales.
• Muchos sistemas no lineales pueden ser representados por la interconexión
de sistemas lineales estacionarios y no linealidades estáticas. Estos modelos
se denominan orientados a bloques (block-oriented nonlinear models). Las
no linealidades estáticas aparecen por ejemplo debido a saturación de
actuadores, sensores con características no lineales, etc.
• De entre los modelos orientados a bloques, los que han sido más estudiados
son los Modelos Hammerstein y los Modelos Wiener.
ISIS -Identificación de Sistemas No Lineales - Juan Carlos Gómez
-4-
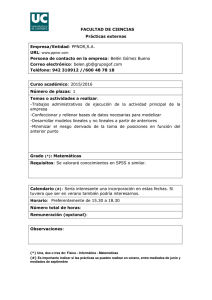
Modelos No Lineales
• Modelos Hammerstein
u(t)
• Modelo Wiener
NL
u(t)
y(t)
LTI
LTI
NL
y(t)
• Modelo Hammerstein-Wiener
u(t)
NL1
LTI
NL2
y(t)
• Modelos orientados a bloques: Incluyen los anteriores más otras posibles
conexiones (serie, paralelo y en retroalimentación) de bloques LTI y no
linealidades estáticas.
ISIS -Identificación de Sistemas No Lineales - Juan Carlos Gómez
-5-
• Modelo regresivo lineal, con regresor como función no lineal de los datos
pasados
(
)
(
)
(
)
yˆ (t ,θ ) = θ 1ϕ 1 u t , y t −1 + θ 2ϕ 2 u t , y t −1 + ! + θ d ϕ d u t , y t −1 = ϕ T (t )θ
ϕi
funciones no lineales arbitrarias de los datos pasados
Problema
Cómo elegir las funciones ϕ i
Posibles soluciones
♦ Expansión tipo caja negra. Por ejemplo:
ϕi (u t , y t −1 ) polinomios en las entradas y salidas pasadas.
♦ Uso de leyes fundamentales (física, química, etc.) para detectar las no
linealidades en el sistema.
ISIS -Identificación de Sistemas No Lineales - Juan Carlos Gómez
-6-
• Modelos No Lineales en Espacio de Estados
x(t + 1) = f (t , x(t ), u (t ), ω (t ),θ )
y (t ) = h(t , x(t ), u (t ),υ (t ),θ )
donde
ω (t ),υ (t )
son perturbaciones (procesos aleatorios)
θ vector de parámetros (desconocido)
NB: El problema de hallar un predictor óptimo para este modelo no lineal
estocástico es muy dificil (no existe solución finito dimensional).
• Modelos No Lineales Tipo Caja Negra
Predictores de la forma:
(
yˆ (t | θ ) = g Z t −1 ,θ
)
(1)
ISIS -Identificación de Sistemas No Lineales - Juan Carlos Gómez
-7-
donde
Z t −1 : datos pasados
Z t = (y t , u t ) = ( y (1), u (1),!, y(t ), u (t ))
Problema
Cómo elegir g (•,•)
Posibles Soluciones
Uso de regresores
!"
con
!"
g (Z t −1 ,θ ) = g (ϕ (t ),θ )
ϕ (t ) = ϕ (Z t −1 )
vector de regresión
Un modelo más general sería permitiendo que el regresor dependa del
parámetro
ϕ (t ,θ ) = ϕ (Z t −1 ,θ )
ISIS -Identificación de Sistemas No Lineales - Juan Carlos Gómez
-8-
!"
Con este enfoque, el problema de elegir g (Z t −1,θ ) en (1) se descompone en
dos problemas:
1. Cómo elegir el vector de regresión ϕ (t ) como función de los datos
pasados.
2. Cómo elegir la función no lineal g (ϕ ,θ ) .
Ejemplos de regresores
Por analogía con los modelos lineales se pueden obtener modelos NARX,
NARMAX, NOE, NFIR.
Los más comunes son modelos NARX y NFIR, en los cuales el regresor
depende sólo de valores medidos (no estimados).
!"
!"
Ejemplos de funciones g (ϕ ,θ )
Típicamente se utiliza expansión en funciones base
ISIS -Identificación de Sistemas No Lineales - Juan Carlos Gómez
-9-
n
g (ϕ ,θ ) = ∑ α k g k (ϕ )
k =1
θ = [α 1 ! α n ]
T
(2)
vector de parámetros
g k (•) : funciones bases
Problema Clave
Posibles Soluciones
Series de Volterra
Cómo elegir las funciones base
!"
k
k
k
k
donde ϕ = {ϕ1 ϕ 2 !ϕ d }, con
1
2
g k (ϕ ) = ϕ k
d
k1 + k 2 + ! k d = k
ISIS -Identificación de Sistemas No Lineales - Juan Carlos Gómez
- 10 -
!"
Enfoques más modernos
Tienen las siguientes características:
#"
Todas las g k están formadas a partir de una función base madre κ (x ) .
#"
Esta función κ (x ) es función de una variable escalar x .
#"
Típicamente las g k son versiones escaladas (dilatadas) y trasladadas de
κ (x ) .
Por ejemplo para d = 1 , se tendría
g k (ϕ ) = g k (ϕ , β k , γ k ) = κ (β k (ϕ − γ k ))
donde β k son los parámetros de escalado, y γ k son los parámetros de
traslación.
ISIS -Identificación de Sistemas No Lineales - Juan Carlos Gómez
- 11 -
Ejemplos de 'funciones base madre'
$"
Serie de Fourier (caso escalar)
κ (x ) = cos(x )
$"
Funciones seccionalmente constantes
1 si 0 ≤ x ≤ 1
κ (x ) =
coc
0
con γ k = k∆ , β k = 1 ∆ , y α k = f (k∆ ). Esto da una aproximación
seccionalmente constante de cualquier función en un intervalo ∆ .
!"
Clasificación de Funciones Base
Bases Locales: las variaciones significativas de la función se dan en
$"
un entorno.
Bases Globales: tienen una variación significativa en todo el eje real.
$"
ISIS -Identificación de Sistemas No Lineales - Juan Carlos Gómez
- 12 -
!"
Funciones Base Multivariables
Producto Tensorial
$"
d
( (
g k (ϕ ) = g k (ϕ , β k , γ k ) = ∏ κ β kj ϕ j − γ kj
j =1
))
Construcción radial
$"
Las funciones dependen sólo de la distancia de ϕ a un dado punto
central (centro).
(
g k (ϕ ) = g k (ϕ , β k , γ k ) = κ ϕ − γ k
βk
)
donde • β k denota una dada norma en el espacio de los regresores ϕ .
Típicamente
ϕ
2
βk
= ϕ T β kϕ
donde β k es una matriz de escalado definida positiva.
ISIS -Identificación de Sistemas No Lineales - Juan Carlos Gómez
- 13 -
Construcción ridge
$"
Las funciones dependen sólo de la distancia de ϕ a un dado hiperplano
(
g k (ϕ ) = g k (ϕ , β k , γ k ) = κ β k ϕ + γ k
T
),
ϕ ∈ ℜd
La función es constante para todos los ϕ que pertenecen al hiperplano
{ϕ ∈ ℜ
ISIS -Identificación de Sistemas No Lineales - Juan Carlos Gómez
d
T
}
: β k ϕ = const
- 14 -
Calidad de la aproximación
El modelo usando expansión en funciones base resulta
!"
n
g (ϕ ,θ ) = ∑ α k κ (β k (ϕ − γ k ))
k =1
♦ Surge el interrogante de cuán bien esta expansión puede representar a
cualquier posible sistema real ' g 0 (ϕ ) '.
La respuesta es que (excepto para polinomios) cualquier función
madre κ (x ) permite aproximar cualquier razonable g 0 (ϕ )
arbitrariamente bien para un n suficientemente grande.
♦ Otro interrogante que surge es la eficiencia de la expansión, es decir
cuán grande debe ser n para lograr un determinado grado de
aproximación.
No hay una respuesta general para esto.
ISIS -Identificación de Sistemas No Lineales - Juan Carlos Gómez
- 15 -
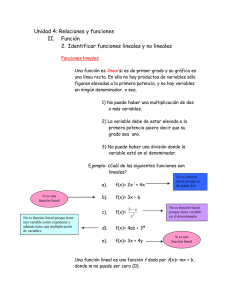
Identificación de Modelos Hammerstein
• Modelos Hammerstein
Método no iterativo (Bai, 1998)
!"
υ
u
k
B(q −1 )
A(q −1 )
N (• )
(
(
B (q
=
A(q
yk =
k
B q −1
A q −1
−1
−1
yk
) c g (u ) + υ
)∑
) N(u ) + υ
)
r
i
i
k
k
i =1
k
(1)
k
donde y k , u k y υ k son la salida, entrada y perturbación en el instante k ,
respectivamente, g i (•) son funciones no lineales usadas para describir la no
linealidad estática N(•) , y
ISIS -Identificación de Sistemas No Lineales - Juan Carlos Gómez
- 16 -
( )
B (q ) = b q
A q −1 = 1 + a1 q −1 + ! + a n q − n
−1
1
−1
+ ! + bm q − m
,
−1
con q denotando el operador desplazamiento directo.
Se asume que los órdenes n, m, s , y las funciones no lineales g i (•) , son
conocidas, y que el objetivo es estimar los parámetros de la parte lineal:
(a1 ! a n b1 ! bm ) , y de la parte no lineal: (c1 ! c r ) , a partir de datos de
entrada-salida.
i
Una elección típica de las funciones g i (•) es g i (u k ) = u k , en cuyo caso, la
parte no lineal queda representada por una expansión polinomial.
La ecuación (1) puede escribirse
n
r
m
y k = −∑ a j y k − j + ∑ ∑ b j c i u i k − j + υ k
j =1
i =1 j =1
(2)
Definiendo los vectores
ISIS -Identificación de Sistemas No Lineales - Juan Carlos Gómez
- 17 -
θ = (a1 , !, an , b1c1 , !, bm c1 ,!, b1cr , !, bm cr )
φ k = (− y k −1 , ! ,− y k − n , u k −1 , ! , u k − m ,
T
u 2 k −1 , ! , u 2 k − m , ! ,
u r k −1 , ! , u r k − m ) T
la ecuación (2) puede escribirse
T
yk = φk θ + υ k
(3)
N
Finalmente, considerando el conjunto de N datos {y k , u k }k =1 , la ecuación
(3) puede escribirse
T
YN = Φ N θ + V N
(4)
donde
Y N = ( y1 , ! , y N )
T
Φ N = (φ1 , ! , φ N )
ISIS -Identificación de Sistemas No Lineales - Juan Carlos Gómez
,
V N = (υ1 , ! , υ N ) ,
T
- 18 -
Luego, la estima de mínimos cuadrados θˆ , del vector de parámetros θ
viene dada por
(
T
θˆ = Φ N Φ N
)
−1
Φ N YN
(5)
,
siempre que la inversa exista. Definiendo ahora los vectores
a = (a1 , !, a n ) , b = (b1 , !, bm ) , c = (c1 , !, c r )
T
T
T
y la matriz
Θ bc
b1 c1
b c
= 2 1
"
b c
m 1
b1 c 2
b2 c 2
"
bm c 2
! b1 c r
! b2 c r
= bc T
#
"
,
! bm c r
el vector de parámetros θ puede escribirse
T
θ = a T , vec(Θ bc )
(
)
T
,
ISIS -Identificación de Sistemas No Lineales - Juan Carlos Gómez
- 19 -
donde vec(Θ bc ) es el vector columna obtenido apilando las columns de Θ bc .
Estimas de los vectores a y vec(Θ bc ) pueden entonces obtenerse de la
∧
estima θˆ en (5). Denotemos â y vec(Θ bc ) a esas estimas.
El problema es como computar estimas de los vectores b y c , a partir de
∧
vec(Θ bc ) .
Es claro que las más cercanas, en el sentido de la norma-2, estimas b̂ y ĉ ,
son tales que minimizan la norma
vec(bˆcˆ ) − vec(Θ
T
es decir
∧
bc )
(bˆ, cˆ) = argmin Θˆ
b, c
donde •
F
2
ˆ
= bˆcˆ T − Θ
bc
2
bc
− bc T
2
F,
2
F,
es la norma de Frobenius.
ISIS -Identificación de Sistemas No Lineales - Juan Carlos Gómez
- 20 -
La solución de este problema de minimización viene dada por la descomposición SVD de la matriz Θ̂ bc . El resultado está resumido en el siguiente
Lema (Bai, 1998).
m× r
T
Lema: Sea Θ̂ bc ∈ ℜ
una matriz no nula, y sea Θ̂ bc = USV
su
descomposición SVD, donde U y V son matrices ortogonales cuyas
columnas son los vectores singulares izquierdos y derechos
respectivamente,
U = (µ1 , µ 2 , ! , µ m ) , V = (ν 1 ,ν 2 , ! ,ν r ) ,
y donde S es una matriz diagonal con los valores singulares
( σ 1 ≥ σ 2 ≥ ! ≥ σ min (m , r ) ≥ 0 ) en la diagonal. Entonces
ˆ − bc T
min Θ
bc
b,c
2
F
=
min (m , r )
∑
σi
2
i =2
(µ1 , σ 1ν 1 ) = argmin Θˆ bc − bc T
b, c
,
2
F .
ISIS -Identificación de Sistemas No Lineales - Juan Carlos Gómez
- 21 -
Prueba: Ver (Bai, 1998).
!
El algoritmo de identificación no lineal puede resumirse:
Paso 1. Computar la estima de mínimos cuadrados θˆ en (5). Una estima â
del vector de parametros a viene dada por las primeras n componentes de
θˆ , y una estima Θ̂ bc de la matriz Θ bc puede construirse a partir de las
últimas m × r componentes de θˆ .
Paso 2. Computar la SVD de Θ̂ bc como en el Lema, de donde estimas de los
parametros b y c pueden calcularse como
bˆ = µ 1 ,
y
cˆ = σ 1ν 1 ,
respectivamente.
ISIS -Identificación de Sistemas No Lineales - Juan Carlos Gómez
- 22 -