Mecánica II - Problema de Sistemas Fecha: 14.09.2006 Se tiene un
Anuncio

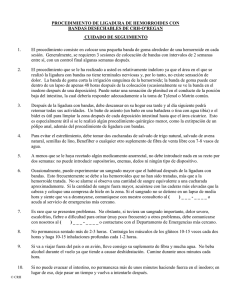
ESCUELA TECNICA SUPERIOR DE INGENIEROS AERONAUTICOS Apellidos, Nombre: Mecánica II - Grupo: Problema de Sistemas Curso: 05/06 Fecha: 14.09.2006 Se tiene un cilindro homogéneo pesado (sólido 2) de radio R, altura h y masa m. Está apoyado según una generatriz sobre un plano horizontal liso O1 x1 y1 con ligadura unilateral . Se toman unos ejes auxiliares Gx0 y0 z0 (sólido 0) con origen en el centro de masas, Gx0 según el eje de revolución, y Gz0 vertical; todos los resultados vectoriales se proyectarán en estos ejes. Para situar el sólido se tomará el ángulo de precesión ψ que forman los planos O1 x1 z1 y Gx0 z0 , y el de rotación propia ϕ del cilindro alrededor de Gx0 . Las coordenadas de G no harán falta porque sólo se va a estudiar el giro. Para simplificar, los momentos principales y centrales del cilindro en ejes 0 se pueden dejar indicados como A, C y C. En el instante inicial el cilindro está en una posición arbitraria, girando con precesión ψ̇ nula y rotación propia ϕ̇ = ω. Se aplica una percusión P j0 en el punto del cilindro de coordenadas (h/2, −R, 0) en ejes 0. 1. Suponiendo que la ligadura se mantiene activa durante la percusión, obtener la velocidad angular inmediatamente después de ésta. 2. Comprobar la hipótesis anterior, calculando el sistema de percusiones de ligadura y comprobando que es compatible con la ligadura unilateral. 3. Demostrar que, después de la percusión, y suponiendo la ligadura activa, el sistema se mueve con velocidad angular ω 21 constante en ejes 0. 4. Calcular el máximo valor de P para que el cilindro no se levante del plano en el movimiento posterior. z1 z0 y0 O1 G ϕ P x1 ψ x0 y1 1. La ecuación del Momento Cinético para percusiones da la velocidad angular después: La ligadura impide el giro alrededor del eje Gy0 , que corresponde al ángulo de nutación, luego: ω 21 = ⌊ϕ̇, 0, ψ̇⌋. Inicialmente, ω 21 = ⌊ω, 0, 0⌋. El momento cinético será: HdG = IG · ω d21 = ⌊A ϕ̇d , 0, C ψ̇ d ⌋ HaG = ⌊A ω, 0, 0⌋ Momento de las percusiones exteriores. Tenemos el de la percusión directamente aplicada, P h/2 k, y el de ligadura. La ligadura impide el movimiento según Gz0 y el giro según Gy0 , por lo el suelo aplicará sobre el cilindro una percusión N k y un momento de percusión en G My j d a ME G = HG − HG 0 A ϕ̇d A ω 0 My = − 0 d P h/2 0 C ψ̇ ⇒ ω d21 ω = 0 Ph (4 pt) 2C 2. El sistema de percusiones de ligadura es un conjunto de percusiones elementales verticales (el plano es liso) a lo largo de la generatriz de contacto. Por ser unilateral, todos tienen que ser ≥ 0. Por la forma de las percusiones elementales o por los grados de libertad que quita, se ve que el sistema se puede reducir a una resultante N k y un momento en G My j. En el apartado anterior se vio que My = 0. La resultante se calcula planteando la ecuación de la cantidad de movimiento (para percusiones) en su dirección. La ligadura es z G = R, ó ż = 0. Si está activa, se tiene N = m ż d − m ż a = 0. El sistema de percusiones de ligadura es nulo, lo que es perfectamente compatible con la ligadura. (1 pt) 3. Para el giro en el movimiento posterior, tenemos la ecuación del momento cinético. Actúan el peso, que no da momento en G, y el sistema de fuerzas de ligadura, que da momento según Gy0 . Aunque fuera nulo en la percusión, no se puede afirmar que ahora lo sea: es otro movimiento, gobernado por otras ecuaciones. A ϕ̈ 0 d d E MG = My = HG = HG + ω 01 ∧ HG = A ϕ̇ψ̇ dt dt 1 0 0 C ψ̈ ϕ̇ = Cte (3 pt) ⇒ ψ̇ = Cte 4. Manejar el sistema de fuerzas de ligadura mediante su resultante y momento en G no es útil para ver si se levanta: no se aprecia el valor máximo del momento. Es mejor reducirlo al punto de momento nulo, que estará a una distancia x (negativa) del origen. Ası́ My = −N x. De la cantidad de movimiento en el sentido vertical se tiene N = m g. De la ecuación de momento según Gy0 : My = −x mg = A ϕ̇ψ̇ = A ω Ph ; 2C Mmax ⇒ |x|max ; h Pmax h mg = A ω 2 2C − h h ≤x≤ ; 2 2 ⇒ Pmax = C mg A ω (2 pt) Otros caminos 1.-2. La percusión se puede resolver también por Analı́tica, pero no es una opción inteligente: En la Lagrangiana habrá que introducir también coordenadas generalizadas para la traslación, que no se pide en el problema. Aunque las ecuaciones queden desacopladas, probablemente no se dará uno cuenta hasta haber planteado todas las ecuaciones. Para calcular las fuerzas generalizadas de las percusiones hay que obtener la velocidad del punto de aplicación en función de todas las velocidades generalizadas, también las que luego no se piden. Por Mecánica Analı́tica no aparecen las percusiones de ligadura, por lo que en el apartado 2 habrı́a que repetirlo todo por Newtoniana. 3. El giro estacionario se puede demostrar de varios modos: Se puede construir la Lagrangiana, introduciendo coordenadas para la traslación, y ver que los ángulos de precesión y rotación son cı́clicos. La Lagrangiana también se puede escribir para el movimiento alrededor del centro de masas, justificando que al no rotar los ejes no hay momentos de las fuerzas de inercia, y que las resultantes están aplicadas en G, que es fijo en ese movimiento. Se pueden buscar integrales primeras: la de la energı́a es una, pero hay que razonar que las velocidades de traslación son constantes; también se conserva la energı́a en el movimiento relativo al centro de masas; es obvio que se conserva el momento cinético respecto al eje vertical; justificar que se conserva el momento cinético respecto al eje de giro es más difı́cil, porque no es fijo, pero sale directamente aplicando la correspondiente ecuación de Euler. De todas estas, dos son independientes, y demuestran que las rotaciones son estacionarias. 2.-4. El sistema de fuerzas/percusiones de ligadura se puede reducir de varios modos, pero siempre con dos incógnitas porque quita dos grados de libertad: a) b) My δF N N1 c) N2 N x El a) es suficiente para los apartados 1. y 2., pues tanto el momento como la resultante son nulos. Para el apartado 4. no sirve, porque no aparece el valor lı́mite del momento My ; convienen más los modos b) y c). Con el b) el lı́mite es que todo el peso cargue en un extremo, es decir, N2 = 0 y N1 = mg. Con el c), basta imponer que x = h/2.