2 +
Anuncio

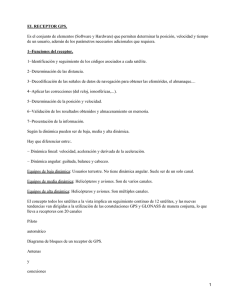
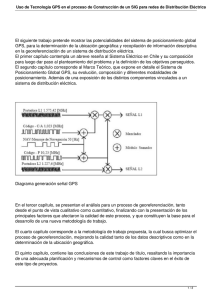
EL SISTEMA DE POSICIONAMIENTO GLOBAL GPS 2.- Conceptos básicos de la constelación GPS El GPS es un sistema satélite basado en señales de radio emitidas por una constelación de 27 satélites activos en órbita alrededor de la Tierra a una altura de unos 20 000 km aprox .. El sistema permite el cálculo de las coordenadas tridimensionales (en un sistema absoluto) que pueden ser usadas en navegación o para la determinación de medidas de tiempo preciso. El sistema fue desarrollado por el Departamento de Defensa de Estados Unidos (DoD) con el objetivo de tener en tiempo real la posición de cualquier móvil o punto (equipado debidamente con un receptor de señal GPS) en cualquier lugar de la superficie terrestre Este sistema surgió debido a las limitaciones del sistema TRANSIT que en la década de los 70 proporcionaba posicionamiento utilizando métodos Doppler. El principal inconveniente de los TRANSIT era la no disponibilidad de satélites las 24 horas del día. 2.- Conceptos básicos de la constelación GPS 2.1.- Segmento espacial La constelación final y el número total de satélites ha variado con el tiempo aunque actualmente cuenta con 24 satélites activos situados a una elevación aproximada de 20180 km sobre la superficie terrestre y con una periodo orbital de unas 12h (11h 58min). Estos satélites emiten unas señales en banda L llamados L1 y L2 que se generan a partir de unos osciladores de abordo que generan una onda de frecuencia fo = 10,23 MHz llamada frecuencia fundamental. fo = 10.23 Mhz Portadora L1 = 154 x fo = 1575.42 Mhz l = 19 cm. Portadora L2 = 120 x fo = 1227.60 Mhz l = 24.4 cm 2 2.- Conceptos básicos de la constelación GPS 2.2.- Components de la señal GPS Sobre estas portadoras se modula el mensaje de navegación y los códigos: El mensaje de navegación contiene las efemérides del satélite y permite saber su posición en cada instante del día. Los códigos tienen características de ruido pseudoaleatorio (PRN, Pseudo Random Noise) de forma que: código C / A (coarse Adquisition) código P (Precise / Protected) se modula solamente sobre L1 y se repite cada 1 ms. se modula L1 y L2 y se repite aprox cada 266.4 días. El posicionamiento de un receptor GPS se puede realizar con cualquiera de los observables de la señal GPS que son: o bien los códigos posicionamiento menos preciso pero inmediato o bien la fase de las portadoras L1 y L2 posicionamiento más preciso pero no inmediato. 3 https://www.youtube.com/watch?v=IoRQiNFzT0k VIDEO: CRITICAL THINKING Bloc IIA Bloc IIR 4 3.- Como funciona GPS 3.1.- Principio de posicionamiento La idea original de GPS es conocer la posición del observador / receptor en un sistema de referencia absoluto global (posicionamiento absoluto). La posición del receptor se determina a partir de las coordenadas de los satélites observados y de las distancias relativas entre cada satélite y el receptor. 5 3.- Como funciona GPS 3.2.- Modelo geométrico R Rs R = Rx - Rs Rx Usuari GPS Geocentro terrestre Rx = posición geocèntrica de l’usuari = (xu , yu , zu ) incógnita Rs = posición geocèntrica del satèl.lit = (x1 , y1 , z1 ) conocido por mensaje navegación R = distància relativa receptor/satèl.lit ó “pseudodistancia” se puede calcular 6 3.- Como funciona GPS 3.2.- Modelo geométrico R = Rx - Rs C. (Tusuari – Tsat1 + Tbias ) = (xusuari - x1)2 + (yusuari - y1)2 + (zusuari - z1)2 C. (Tusuari – Tsat2 + Tbias ) = (xusuari – x2)2 + (yusuari – y2)2 + (zusuari – z2)2 C. (Tusuari – Tsat3 + Tbias ) = (xusuari – x3)2 + (yusuari – y3)2 + (zusuari – z3)2 C. (Tusuari – Tsat4 + Tbias ) = (xusuari – x4)2 + (yusuari – y4)2 + (zusuari – z4)2 4 incògnitas 4 satélites (como mínimo!) 7 3.- Como funciona GPS 3.3.- La pseudodistància La distancia relativa satélite / receptor medida como tiempo de vuelo de la señal multiplicado por la velocidad de la luz no es ciertamente la distancia geométrica exacta entre estos dos puntos de ahí que se denomine pseudistància, ya que está afectada de una serie de errores Todos estos error llevan a que la determinación de coordenadas absolutas del receptor, con código, pueda llegar a errores de entre 100-150m sí SA-ON y unos 20m con SA-OFF. 8 3.- Cóm funciona GPS 3.4.- Estimación del error en el posicionamiento GPS El error en el posicionamiento GPS depende de la precisión con que medimos la pseudistància, básicamente, y también depende de la configuración geométrica de los satélites que estamos observando. El error en la medida de la pseudodistància llama UERE (User Equivalent Range Error), mientras que la magnitud que expresa la "bondad" de la geometría de satélites visibles llama DOP (Dilution of Precision).? - UERE (User Equivalent Range Error) Es el error equivalente en la distancia relativa satélite / usuario. Resulta de proyectar todas las posibles fuentes de error del sistema GPS sobre la línea que une el satélite y el usuario. Es, por tanto, un error equivalente para todos los satélites (es un error cuadrático medio) para posicionamiento absoluto, en código P el UERE = 5-8m y en código C / A, UERE = 20-30m. - DOP (Dilution Of Precision) Error debido a la geometría de los satélites en el momento del cálculo de la posición. 9 Menos de 2 más de 6 3.- Como funciona GPS 3.5.- Resultado ecuación de posicionamiento El resultado son las coordenadas cartesianas del receptor en un sistema de referencia absoluto (Seeber, 1983) que pueden transformarse en latitud, longitud y altura del receptor sobre el elipsoide de referencia WGS-84. Rx (x,y,z) 10 3.- Como funciona GPS 3.5.- Resultado ecuación de posicionamiento A partir de la latitud, longitud y altura del receptor calculadas en superficie ideal del elipsoide WGS-84 como modelo 3D terrestre, se puede hacer la proyección en una superficie plana más coherente con la realidad del terreno mapas y soportes cartográficos. ATENCIÓN: Hay que ser coherentes con la superficie plana elegida (operaciones de conversión entre 3D y 2D). 11 3.- Como funciona GPS 3.5.- Resultado ecuación de posicionamiento • Geoide Curva que determina el nivel del mar (varia según lugar) En los continentes se mide el nivel del mar por el campo gravitatorio • En el sistema GPS la altitud se determina en relación a ellipsoid WGS84 4.- Técnicas de posicionamiento con GPS 4.1.- Tipos de posicionamiento y procesado Clasificamos básicamente dos tipos de resultados en el posicionamiento: -Absoluto coordenadas absolutas en un sistema de referencia geocéntrico -relativo / Diferencial coordenadas respecto de un punto conocido. Rx 13 4.- Técnicas de posicionamiento con GPS 4.2.- Concepto de integridad 5.- Receptores 5.1.- Funciones de un receptor GPS Las funciones principales de un receptor son: 1º.- Sintonizar las señales emitidos por los satélites adquisición de la señal (hay receptores secuenciales, receptores continuos o multicanal y receptores con canales multiplexados). 2º.- Decodificar el mensaje de navegación. 3º.- Medir el retraso de la señal (tiempo de vuelo desde el transmisor hasta el receptor), a partir del cual se calcula la posición. 4º.- Presentar la información de la posición en la que se encuentra (en 3D ó 2D). 15 5.- Receptores 5.2.- Tipos de receptores civils/comercials Clasificaciónes posibles segun: a.- Tipo de observaciones y codigo utilizado: - Codi C/A - Codi C/A + fase portadora L1 - Codi C/A + fase portadora L1 + fase portadora L2 - Codi C/A + codi P + fases portadores L1, L2 b.- Tipo de usuario: - Receptors per a la navegació - Receptors geodèsics 16