convencion de. las naciones unidas sobre el derecho del mar
Anuncio

LOS
NACIONES
UNIDAS
j{x :<~C. \
I ..........
I
Distr.
RESERVADA
CONVENCION
DE. LAS NACIONES UNIDAS
SOBRE EL DERECHO DEL MAR
I
l
II
III
II
I
LOS/PCN/BUR/INF/R. 3
30 d e n o v i e m b r e
de 1987
ESPAÑOL
ORIGINAL:
INGLES
I
.'
l
III
II
C O M I S I O N P R E P A R A T O R I A DE LA A U T O R I D A D
I N T E R N A C I O N A L DE LOS F O N D O S M A R I N O S
Y DEL T R I B U N A L I N T E R N A C I O N A L DEL
D E R E C H O DEL M A R
I N F O R M A C I O N R E L A T I V A A LA S O L I C I T U D R E V I S A D A DEL J A P O N PARA
LA I N S C R I P C I O N DE LA E M P R E S A "DEEP O C E A N R E S O U R C E S D E V E L O P M E N T
Co., Ltd." (DORD) COMO P R I M E R I N V E R S I O N I S T A CON A R R E G L O A LA
R E S O L U C I O N II DE LA T E R C E R A C O N F E R E N C I A DE LAS N A C I O N E S UNIDAS
SOBRE EL D E R E C H O DEL MAR, C O M U N I C A D A A LA M E S A A M P L I A D A CON LA
A N U E N C I A DEL S O L I C I T A N T E
1.
El G o b i e r n o del Japón, que firmó la C o n v e n c i ó n de las N a c i o n e s Unidas sobre el
D e r e c h o del Mar el 7 de f e b r e r o de 1983, p r e s e n t ó la s o l i c i t u d r e v i s a d a en nombre
de la e m p r e s a j a p o n e s a Deep O c e a n R e s o u r c e s D e v e l o P m e n t C o . , Ltd. (designada en
a d e l a n t e como "DORD") .
2.
La s o l i c i t u d había sido o r i g i n a l m e n t e p r e s e n t a d a a la C o m i s i ó n P r e p a r a t o r i a
de la A u t o r i d a d I n t e r n a c i o n a l de los F o n d o s M a r i n o s y del T r i b u n a l I n t e r n a c i o n a l
del D e r e c h o del Mar el 21 de a g o s t o de 1984.
Desde e n t o n c e s se ha r e v i s a d o la
lista de c o o r d e n a d a s en la s o l i c i t u d luego de que se han r e s u e l t o f e l i z m e n t e todas
las
s u p e r p o s i c iones.
3.
El Japón, como E s t a d o c e r t i f i c a d o r , se a s e g u r a de que las áreas con r e s p e c t o
a las c u a l e s se p r e s e n t a la s o l i c i t u d no se s u p e r p o n e n con las r e c l a m a d a s por los
demás p r i m e r o s i n v e r s i o n i s t a s m e n c i o n a d o s en los incisos i) y ii) del a p a r t a d o a)
del p á r r a f o 1 de la r e s o l u c i ó n II de la T e r c e r a C o n f e r e n c i a de las N a c i o n e s U n i d a s
sobre el D e r e c h o del Mar.
4.
El área a que se refiere la s o l i c i t u d está u b i c a d a e x c l u s i v a m e n t e en la Zona,
tal como se d e f i n e en el a r t í c u l o 1 de la C o n v e n c i ó n sobre el D e r e c h o del Mar,
fuera de los l í m i t e s de toda j u r i s d i c c i ó n nacional.
5.
por
En la s o l i c i t u d del Japón figura el c e r t i f i c a d o de los g a s t o s e f e c t u a d o s
la DORD de c o n f o r m i d a d con el inciso i) del a p a r t a d o a) del p á r r a f o 1 de la
resolución
II.
6.
La s o l i c i t u d r e v i s a d a se
las d e c i s i o n e s de la C o m i s i ó n
F o n d o s M a r i n o s y del T r i b u n a l
documentos LOS/PCN/L.4I/Rev. I
a g o s t o de 1987.
87-31915
8334f
ha p r e s e n t a d o de c o n f o r m i d a d con la r e s o l u c i ó n II y
P r e p a r a t o r i a de la A u t o r i d a d I n t e r n a c i o n a l de los
I n t e r n a c i o n a l del D e r e c h o del Mar que f i g u r a n en los
de Ii de s e p t i e m b r e de 1986 y L O S / P C N / L . 4 9 de 6 de
/" " "
LOS/PCN/BUR/INF/R. 3
Español
Página 2
7.
El Japón ha d e l i m i t a d o el área s o l i c i t a d a de c o n f o r m i d a d con el p á r r a f o 10 de
la D e c l a r a c i ó n relativa a la a p l i c a c i ó n de la r e s o l u c i ó n II que figura en el anexo
al d o c u m e n t o L O S / P C N / L . 4 I / R e v . I, y ha p r e s e n t a d o una solicitud relativa a una
región de 225.000 km 2, que se divide en las partes siguientes:
a)
Un área de c o n t r i b u c i ó n de 17 . 300 km 2 , que se ha de reservar a la
Autoridad, de c o n f o r m i d a d con el inciso ii) del a p a r t a d o 1 d) del p á r r a f o 13 del
anexo al d o c u m e n t o L O S / P C N / L . 4 I / R e v . I;
b)
Un área que abarca un total de ii0.000 km 2, que se reservará a la
Autoridad, además de los 17 . 300 km 2 , mencionados, c o n f o r m e a los apartados 1 a)
y 1 c) del p á r r a f o 13 del anexo al d o c u m e n t o L O S / P C N / L . 4 I / R e v . I;
c)
Un área de una superficie total de 52.300 km 2, que se asignará
solicitante
de c o n f o r m i d a d
con el apartado
2 del párrafo
13 d e l a n e x o a l
LOS/PCN/L. 4i/Rev. 1 ;
al
documento
d)
Dos áreas de igual valor c o m e r c i a l estimado, cada una de las cuales
tendrá una superficie total de 22 . 700 km 2 , una de las cuales se asignará
al s o l i c i t a n t e además del área indicada por éste, y el otro a la Autoridad,
de c o n f o r m i d a d con el a p a r t a d o 2 del p á r r a f o 13 del anexo al d o c u m e n t o
LOS/PCN/L. 4i/Rev. i.
En c o n s e c u e n c i a , se asignarán al s o l i c i t a n t e y a la A u t o r i d a d
de 75.000 km2 y 150.000 km 2, r e s p e c t i v a m e n t e .
superficies
totales
8.
El Estado c e r t i f i c a d o r y la DORD c u m p l i r á n las d i s p o s i c i o n e s de la
r e s o l u c i ó n II, incluido el pago de un d e r e c h o de 250.000 dólares, luego de recibir
la n o t i f i c a c i ó n de inscripción de la DORD como primer inversionista.
LOS/PCN/BUR/INF/R. 3
Español
Página 3
Anexo
PROSPECCION
DE N O D U L O S
DE M A N G A N E S O
EN E L J A P O N
IN DI CE
Página
I.
II.
BUQUES
METODOS
A.
DE
INVESTIGACION
Y EQUIPOS
Prospección
.................................
.......................................
geológica
...............................
i.
Toma
de muestrias c o n
mordaza
en c a í d a
libre
2.
Toma
de m u e s t r a s
con
pala
3.
Toma
de m u e s t c a s
con
mordaza
4.
Toma
de m u e s t r a s
con
sacatestigos
de p i s t ó n
en c a í d a
sacatestigos
Okean
.....
..........
..............
.....
/
B.
C
Q
D.
5.
Toma
de m u e s t r a s
con
sacatestigos
6.
Toma
de m u e s t r a s
con
cangilón
Prospección
geofísica
i.
Pistola
de a i r e
2.
Determinador
3.
Registrador
4.
Sonda
5.
Sistema
draga
.
...........
................................
de p e r f i l e s
del
estrecho
subsuelo
I0
............
de p r e c i s i ó n
..........
............................
de e x p l o r a c i ó n
i0
i0
..................................
de p r o f u n d i d a d
de haz
de
libre
i0
ii
ii
12
de m u l t i f r e c u e n c i a
O b s e r v a c i ó n del f o n d o del mar; c á m a r a de t o m a s f i j a s
m o n t a d a en los r e c o g e d o r e s de m u e s t r a s . . . . . . . . . . . . . . .
12
Instalaciones
13
auxiliares
i.
Analizador
2.
Unidad
3.
Fijación
a)
b)
por
central
.............................
fluorescencia
de
de p r o c e s a m i e n t o
X ..........
13
..................
13
rayos
14
de p o s i c i o n e s
S i s t e m a de s a t é l i t e s de n a v e g a c i ó n
de la A r m a d a (NNSS) . . . . . . . . . . . . . . . . . . . . . . . . . .
14
Sistema
16
mundial
de
fijación
de p o s i c i o n e s
(GPS)
/..o
LOS/PCN/BUR/INF/R. 3
Español
Página 4
PROSPECCION
DE NODULOS
DE M A N G A N E S O
EN EL JAPON
La p r o s p e c c i ó n de nódulos de m a n g a n e s o en el Japón se c a r a c t e r i z a por el
d e n o m i n a d o método de p r o s p e c c i ó n p r o g r e s i v a m e n t e más precisa, en que a u m e n t a la
p r e c i s i ó n de la i n v e s t i g a c i ó n a medida que avanza la prospección.
A continuación
figuran d e t a l l e s relativos a sus buques de i n v e s t i g a c i ó n así c o m o a los métodos y
equipos.
I.
BUQUES
DE
INVESTIGACION
El buque de i n v e s t i g a c i ó n H a k u r e i - M a r u (1.822 toneladas), que se había
u t i l i z a d o para la p r o s p e c c i ó n de nódulos de manganeso, se sustituyó en 1980 por
el H a k u r e i - M a r u No. 2 (2.111 toneladas) .
Las c a r a c t e r í s t i c a s
siguientes:
especiales
del H a k u r e i - M a r u No.
2 comprenden
las
a)
Grandes cabrias y un bastidor en A para la botadura, el arrastre y la
r e c u p e r a c i ó n de equipo pesado.
La c u b i e r t a de popa tiene e s p a c i o suficiente para
e f e c t u a r o p e r a c i o n e s sin estorbo.
Se d i s p o n e de un v a r a d e r o en la popa;
b)
Las m á q u i n a s p r i n c i p a l e s dobles de un solo árbol con hélices de paso
c o n t r o l a d o a s e g u r a n que la p o s i c i ó n del buque se m a n t e n g a con facilidad y permiten
realizar p r o s p e c c i o n e s a v e l o c i d a d e s e x t r e m a d a m e n t e reducidas del buque.
Para
m e j o r a r la g o b e r n a b i l i d a d , el H a k u r e i - M a r u No. 2 d i s p o n e de un impulsor de proa y
una mayor s u p e r f i c i e de timón;
c)
G e n e r a d o r e s de CA de p r e c i s i ó n s u m i n i s t r a n energía al equipo de
p r o s p e c c i ó n geofísica.
La c o r r i e n t e alterna del g e n e r a d o r principal se rectifica a
c o r r i e n t e c o n t i n u a m e d i a n t e un semiconductor, y luego se c o n v i e r t e a una c o r r i e n t e
alterna regular y rectangular de i00 a 115 V m e d i a n t e un regulador a u t o m á t i c o de
tensión.
25 kVA CA I00V 1 ~ 60 Hz - 1 unidad
25 kVA CA l15V 1 ~ 60 Hz - 2 u n i d a d e s
Las e s p e c i f i c a c i o n e s
Longitud
Ancho
principales
del H a k u r e i - M a r u
No.
..............................................
.................................................
Máxima
velocidad
Velocidad
Máquina
de ensayo
de servicio
principal
............................
.................................
.....................................
2 son las siguientes:
88,8 m
13,8 m
17,27 nudos
15,15 n u d o s
2.100 cv x 2 u n i d a d e s
/..Q
LOS/PCN/BUR/INF/R. 3
Español
Página 5
Impulsor
de p r o a
Laboratorios
Primer
Segundo
......................................
..........................................
laboratorio
(planificación)
Tercer
laboratorio
Cuarto
laboratorio (análisis
Quinto
laboratorio
Cuarto
oscuro
Pañol
8 cuartos
(geofísica)
laboratorio
Sala de c o n t r o l
379 kW
(geología)
químico)
(computadora
residente)
(fotografía)
a distancia
de
la c a b r í a
No.
1
de m a n t e n i m i e n t o
Sistema
de n a v e g a c i ó n
Lor an C
Sistema
de s a t é l i t e s
Sistema mundial
Cabrias
de n a v e g a c i ó n
de f i j a c i ó n
de la a r m a d a
de p o s i c i o n e s
y grúas
C a b r i a No.
1
C a p a c i d a d n o m i n a l .......
Cable . ..................
A l a m b r e r e c t o de 7 t o r o n e s
15,5 t o n e l a d a s
16 mm ~ x i 0 . 0 0 0 m
Cabria
2
C a p a c i d a d n o m i n a l .......
Cable ...................
Cable blindado coaxíal
23 t o n e l a d a s
24,6 mm ~ x 12.000
C a p a c i d a d n o m i n a l .......
Cable ...................
Cable blindado coaxial
i, 5 t o n e l a d a s
6,9 mm ~ x 7,000
Cabría
Cabria
No.
No.
3
para el
hidrófono
C a p a c i d a d n o m i n a l .......
Cable ...................
Capacidad
nominal
.......
5 toneladas
de c h a r n e l a
Capacidad
nominal
.......
2 toneladas
G r ú a de c u b i e r t a
Capacidad
nominal
.......
2 toneladas
Grúa
m
0,15 t o n e l a d a s
38 mm 6 x 56 m
16 mm ~ x 180 m
charnela
G r ú a ae
m
Q Q .
LOS/PCN/BUR/INF/R. 3
Español
Página 6
Bastidor
y montante
B a s t i d o r en A sobre
el v a r a d e r o
Carga de trabajo ........
Carga de d e s p l a z a m i e n t o .
35 t o n e l a d a s
5 toneladas
22 t o n e l a d a s
2 toneladas
Montante
de popa
Carga
Carga
de trabajo ........
de d e s p l a z a m i e n t o .
Montante
de proa
Carga
Carga
de trabajo
de d e s p l a z a m i e n t o
II.
A.
I.
Toma
METODOS
PrQspección
de m u e s t r a s
4 toneladas
1 tonelada
.
Y EQUIPOS
geológica
con m o r d a z a
en caída
libre
Una m o r d a z a en caída libre, c o n s i s t e n t e en un flotador, una m o r d a z a y lastres,
recoge nódulos de m a n g a n e s o y p e q u e ñ a s c a n t i d a d e s de m u e s t r a s de s e d i m e n t o s c a y e n d o
por su p r o p i o peso luego de botarse al mar.
Al c o n t a c t o con el lecho marino, se
sueltan a u t o m á t i c a m e n t e los lastres, h a c i e n d o que el flotador levante la mordaza.
La boca a b i e r t a de la mordaza, c o n o c i d a también c o m o m a n d í b u l a , recoge los n ó d u l o s
de m a n g a n e s o y c u a l e s q u i e r a otros m a t e r i a l e s que se hallen en una s u p e r f i c i e de
0,13 m 2 (0,35 m x 0,37 m).
Al ascender, se c i e r r a el brazo de la p a l a n c a
q u e d a n d o a t r a p a d o s los nódulos en la red de toma de m u e s t r a s .
Las m u e s t r a s de
s e d i m e n t o s se r e c o g e r á n en un tubo.
El flotador vence el peso de la m u e s t r a y
el recogedor de m u e s t r a s y emerge a la s u p e r f i c i e , luego de lo cual se ubica la
m o r d a z a m e d i a n t e el r a d i o f a r o o la luz de la baliza.
2.
baja
T o m a .de m u e s t r a s
con p a l a . s a c a t e s t i g o s
Una pala s a c a t e s t í g o s es un tipo de s a c a t e s t i g o s
al agua m e d i a n t e una cabria.
encerrado
El t a m a ñ o de la caja instalada de toma de m u e s t r a s
50 cm de a n c h o x 50 cm de largo x 50 cm de altura.
en una caja,
que
se
es de a p r o x i m a d a m e n t e
Al c o n t a c t o con el lecho marino, la caja de toma de m u e s t r a s
s e d i m e n t o y el d i s p a r a d o r de la pala actúa s i m u l t á n e a m e n t e .
penetra
L u e g o de a s e g u r a r s e de que la pala e x c a v a p a r t e del s e d i m e n t o bajo
m a r i n o justo por d e b a j o de la caja de toma de muestras, el recogedor de
iza e n s e g u i d a con una m u e s t r a de s e d i m e n t o casi sin alterar, con lo que
m u e s t r a s de nódulos de m a n g a n e s o con la misma a p a r i e n c i a que en el lecho
en
el fondo
m u e s t r a s se
se recogen
marino.
/O
• Q
LOS/PCN/BUR/INF/R. 3
E$paíSol
Pígina 7
-~.-. - ~ ~ - . _-_.-.-_:-:-~_--~/:~ ~-~~~_-r._~-.- ~._--.:
Caída libre
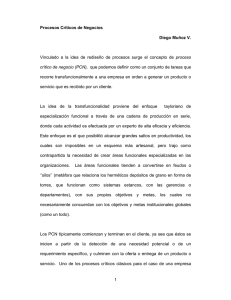
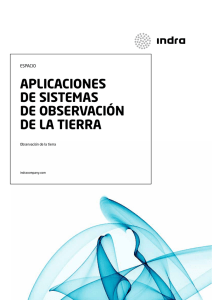
Figura i.
Contacto con el fondo
Momento del disparo
Momento de soltar
los lastres
Cierre
Subida a la
superficie
Funcionamiento del recogedor de muestras de mordaza
en caída libre (según el catálogo de Preussag)
/000
LOS/PCN/BUR/INF/R. 3
Español
Página 8
3.
baja
Toma
de m u e s t r a s
con mordaza
La m o r d a z a Okean es un tipo de extractor
al agua con una cabria.
Okean
de m u e s t r a s
de peso muerto,
que
se
Al c o n t a c t o con el lecho marino, la mordaza se cierra gracias al peso m u e r t o
al e n r o l l a r s e la cuerda suspendida.
Las m u e s t r a s de nódulos de m a n g a n e s o y
s e d i m e n t o s se recogen en la mordaza.
A d i f e r e n c i a de cuando se utiliza
m u e s t r a s sufren cierta alteración.
4.
Toma
de m u e s t r a s
la pala
con
sacatestigos,
sacatestigos
en este caso
las
de pistón
La pala s a c a t e s t i g o s y la m o r d a z a Okean son de utilidad para estudiar la
relación entre los nódulos de m a n g a n e s o y los sedimentos, pero sólo p e n e t r a n en el
lecho m a r i n o unas pocas decenas de c e n t í m e t r o s .
A fin de recoger m u e s t r a s de una
p r o f u n d i d a d de hasta 10 m, se utiliza un s a c a t e s t i g o s de pistón s u s p e n d i d o por
alambres, aunque adolece de i n c o n v e n i e n t e s tales como poca e f i c i e n c i a de
f u n c i o n a m i e n t o , e s p e c i a l m e n t e en mal tiempo.
Al c o n t a c t o con el lecho del mar, un tubo s a c a t e s t i g o s p e n e t r a en e l s e d i m e n t o
gracias a un peso y recoge la muestra.
Luego se iza el s a c a t e s t i g o s .
En el
e x t r e m o inferior del tubo para testigos se instala el retén de t e s t i g o s .
5.
Toma de m u e s t r a s
con
sacatestigos
en caída
libre
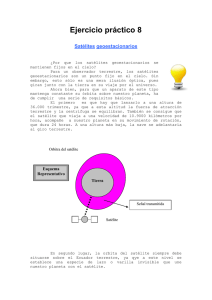
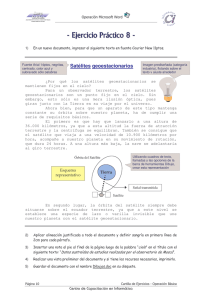
Un s a c a t e s t i g o s en caída libre, c o n o c i d o como s a c a t e s t i g o s "Boomerang",
p e r m i t e extraer m u e s t r a s de una p r o f u n d i d a d de 1,0 m bajo el fondo del mar.
Este
d i s p o s i t i v o , que funciona de m a n e r a análoga a las m o r d a z a s en caída libre, llega al
fondo del mar y penetra en éste por su propio peso, luego de lo cual el d i s p a r a d o r
suelta el lastre y hace que se levante el tubo interior s o l i d a r i o al flotador de
vidrio.
La lámpara e s t r o b o s c ó p i c a dentro del flotador de vidrio p a r p a d e a para
i d e n t i f i c a r su posición.
El empleo del s a c a t e s t i g o s "Boomerang" se limita a las
noches oscuras en que el mar está en calma.
A pesar de la facilidad de uso y la e f i c i e n c i a del tomador de muestras, el
d i s p a r a d o r puede no funcionar a causa de no poder penetrar en el fondo (debido a la
p r e s e n c i a de un lecho m a r i n o muy duro).
/.
• "
L~mpara de destello
Q
Bola de goma
A
--BOlaLastredeg
Palanca
dis~arador~
del flotad(
e~~lita d ~FlOt
dL~
V~Ivula
Tubo de
testigos
(~nterior
-.-
Peso oiloto
Palanca
di sparadora
del flotador
80"
Alambre
e
o e
4 °
,Peo
e
o
e
•
[ ,
1
%
e
Peso oiloto
!
,
•
Tubo de
".~.'
testigos
(exterior) ""
i
.e
,
.e
ea
e
e e
: I
i
..
•"•t e
e
e
ee~
,% •
•
ea •
•
e
•
ea
e•
,,,
•e
• •
::'7""
/
_L
Ret~n del testigo
e••
Figura 2. Funcionamiento del sacatesti~os en caída libre
(seAnín el catálogo de Benthos )
~Mt*
-,,o
e
e
e
I-'~I
LOS/PCN/BUR/INF/R. 3
Español
Página 10
6.
Toma d~ m u e s t r a s
con cangilón
de draga
Un típico sistema de dragado consiste en un cangilón de draga de tipo de
jaula, un lastre (de aproximadamente 500 kg) y un indicador de sonar, y se hace
funcionar de la manera siguiente:
a)
Todo el sistema de dragado
se lanza por la borda;
b)
Se deja que la red de toma de muestras, el cangilón de draga y el lastre
toquen suavemente el fondo del mar, en ese orden.
Una vez que se confirma que el
lastre ha tocado fondo por las ondas directas y reflejadas del indicador de sonar,
se deja de desenrollar el alambre;
c)
Luego se arrastra el sistema de dragado mediante
manteniendo el lastre 10 a 30 m sobre el lecho del mar;
el alambre de retención,
d)
Enseguida se eleva el sistema hasta soltar la red del fondo y luego se
vuelve a bajar al fondo marino, repitiendo el procedimiento en b) supra;
e)
Todo el sistema de dragado
B.
se iza a bordo.
Prospeoció n g e o f í s i c a
La prospección geofísica de los fondos marinos y del subsuelo se efectúa
mediante presiones acústicas de reflexión.
Se aplican los siguientes métodos de
prospección acústica a lo largo de las líneas de prospección proyectadas con
antelación.
I.
Pistola
de aire
Se utiliza ocasionalmente una pistola de aire de un solo cañón para investigar
la estructura interna de los estratos del fondo marino.
La pistola de aire inyecta
directamente aire a alta presión en el agua generando ondas acústicas de baja
frecuencia.
Luego de alcanzar una profundidad de varios cientos de metros bajo el
lecho marino, la onda acústica de retorno se capta mediante hidrófonos y se filtra
de modo de obtener una gama de frecuencias entre 3 1 , 5 Hz y 125 Hz.
Las señales de
presión acústica que forman parte de las ondas filtradas se someterán a análisis
c o m p u t a d o r i z a d o de da tos.
2.
D_etermina,.dor de perfiles
del. subsuel 0
El sistema determinador de perfiles del subsuelo combina un determinador
de perfiles del subsuelo con un registrador de profundidad de precisión y está
concebido de modo de reducir a un mínimo la interferencia entre estos dos
instrumentos.
LOS datos obtenidos por el registrador de profundidad de precisión
son tratados en una unidad de procesamiento de datos con lo que se obtiene un
levantamiento topográfico de la zona.
El sistema determinador de perfiles del
subsuelo también se utiliza como sistema de apoyo para el registrador de
profundidad de precisión.
/...
L o s / P C N / B U R / I N F / R •3
Español
Página ii
El determinador de perfiles del subsuelo utiliza frecuencias d e 3,5 kHz
y 7,0 kHz, que se diferencian en el uso.
Cuenta con dos métodos diferentes de
determinación de perfiles.
El primer método, que utiliza el proceso ordinario de
onda continua, con ondas de pulsos cortos, medianos y largos, logra una mayor
precisión al utilizar pulsos más cortos transmitidos a niveles de mayor energía;
el otro método utiliza una señal modulada en frecuencia de pulsos largos,
que puede descubrir señales sumamente débiles captadas en medio del ruido de fondo.
3.
Registrador
de profundidad
de precisión
Este sistema registrador combina un registrador de profundidad de precisión
con un determinador de perfiles de subsuelo, concebido como un sistema integrado
de medición de la profundidad del agua que reduce a un mínimo la interferencia
recíproca.
Los datos obtenidos del registrador de profundidad de precisión se envían a
una unidad de procesamiento para obtener registros de la profundidad, que a su vez
se utilizarán para confeccionar perfiles topográficos.
El determinador de perfiles
de subsuelo se emplea para determinar perfiles y funciona como sistema de apoyo del
registrador de profundidad de precisión.
El transductor de la ecosonda alojado en el domo del sonar (contrastado) emite
una onda de 12 kHz y amplifica y registra las ondas reflejadas del fondo m a r i n o
para trazar un perfil de dicho fondo.
El sistema permite registrar 64 tipos de
caracteres.
Los datos obtenidos también pueden utilizarse como entrada de otros
equipos.
4.
Sonda de haz estrecho
El sistema de sonda de haz estrecho es una ecosonda de alto rendimiento para
actividades de medición generales y especiales en esferas de las investigaciones
oceanográficas tales como oceanografía, biología marina (peces, plancton, capas
dispersantes) y morfología.
Debido a su alta energía acústica de salida, la gama de aplicación de la sonda
de haz estrecho se extiende incluso a grandes profundidades.
Para una medición
exacta es imprescindible una resolución óptima, incluso en zonas dificultosas
(pendientes escarpadas, fondo con fisuras y desparejo, etc.).
Los requisitos de
un largo alcance, alta precisión de medición (resolución) y poder de penetración
del fondo y los estratos se contraponen parcialmente.
A fin de lograr resultados
óptimos en estas condiciones de trabajo, se ha dotado al sistema de tres
frecuencias, que se pueden seleccionar según sea necesario.
Condición previa para un alto poder de resolución de la medición es un enfoque
sumamente preciso de las ondas ultrasónicas transmitidas o recibidas.
Estos anchos
de haz reducidos (2,6 ° a 30 kHz) se logran gracias a un transductor de gran
superficie.
/
. 8 "
LOS/PCN/BUR/INF/R. 3
Español
Página 12
5.
Sistema de exploración de m u l t i f r e c u e n c i a
El sistema de exploración de m u l t i f r e c u e n c i a proporciona información sobre
la distribución, la densidad y el tamaño de nódulos de m a n g a n e s o en el lecho marino
en tiempo real y en forma c o n t i n u a cuando se combina con instrumentos de sondeo
acústico tales como e c o s o n d a s y el determinador de perfiles de subsuelo, con los
que suelen estar dotados los buques de investigación oceanográfica.
La concepción del sistema se concluyó en 1978.
El primer c o n j u n t o
a bordo del H a k u r e i Maru N o . 2 y se puso en servicio en agosto de 1980.
se instaló
Las frecuencias de los instrumentos de sondeo acústico tales como las
ecosondas, y el determinador de perfiles del subsuelo teóricamente deberían estar
c o m p r e n d i d a s en las siguientes gamas a fin de lograr la mejor calidad, ya que se
c o n s i d e r a que los nódulos que se trata de descubrir tienen diámetros que varía
entre unos pocos centímetros y más de i0.
Frecuencia
i:
3 a 5 kHz
Frecuencia
2:
8 a 15 kHz
Frecuencia
3:" 25 a 35 kHz
Desde luego, es posible obtener información suficiente para fines p r á c t i c o s con
frecuencías distintas de las anteriores.
Durante las prospecciones también es útil
una combinación de dos frecuencias.
El sistema de exploración de m u l t i f r e c u e n c i a
puede combinarse con cualquier tipo de instrumentos de sondeo acústico sin mayor
especificación, siempre que las señales de salida de las sondas que se reciben de
éstos se amplifiquen linealmente y se controlen para evitar la saturación.
C.
O b s e r v a c i ó n del fondo del mar; cámara de tomas fijas
montada en los recogedores de muestras
Se monta un sistema de cámara para tomas abisales en cada mordaza de caída
libre, pala sacatestigos y mordaza Okean a fin de fotografiar el fondo del mar
inmediatamente antes de recoger las muestras.
La cámara está encerrada en una caja resistente a las presiones que imperan en
aguas de 6.000 m de profundidad, y tiene un peso de 2,0 kg suspendido de un alambre
que actúa c o m o disparador e l e c t r o m a g n é t i c o del obturador para tomar fotos en el
momento del contacto del lastre con el fondo del mar.
Este mecanismo se conoce
como interruptor por contacto con el fondo.
/O
• Q
LOS/PCN/BUR/INF/R- 3
Español
Página 13
D.
I.
Instalaciones
auxiliares
A n a l i z a d o r por fluorescencia
de rayos X
Las muestras de nódulos de manganeso se secan, trituran y reducen y luego
se analizan a bordo utilizando un analizador por fluorescencia de rayos X.
Los ra~os X son ondas electromagnéticas de hna longitud de onda de
0,01 a i00 A.
Una vez que penetran en un cuerpo, causan emisión de rayos X
fluorescentes c o r r e s p o n d i e n t e s a cada elemento contenido en el cuerpo.
Un cristal
de rayos X, conocido también como cristal analizador, capta los rayos X
fluorescentes de los elementos de la muestra, cuya intensidad se mide para obtener
un análisis c u a n t i t a t i v o con un contador de centelleo.
2.
Unidad central d e procesamiento
La unidad central de p r o c e s a m i e n t o almacena y controla en forma eficaz
grandes cantidades de datos de prospección y realiza diversas funciones tales como
procesamiento, análisis y evaluación de datos.
Además, produce diversos tipos de
información relativa a la prospección.
Las funciones principales de esta unidad son el procesamiento
el análisis de datos y la evaluación de datos.
Función de p r o c e s a m i e n t o
de datos,
de datos
Todos los datos de entrada recibidos por este sistema se verificarán, se
reordenarán y se depurarán de conformidad con un formato uniforme.
Mediante esta
función se garantiza que los datos deseados pueden recuperarse siempre que sea
necesario.
Función de análisis
de datos
Los datos almacenados con arreglo a la función antes descrita pueden
recuperarse y analizarse para obtener información más exacta; por ejemplo,
distribución, topografía, sedimentación, correlación, etc.
Los resultados
se exhiben en mapas, cuadros y otros documentos°
Función de evaluación
de datos
Los datos analizados con arreglo a la función antes descrita pueden utilizarse
para obtener est imaciones del valor de los yacimientos en determinadas condiciones.
/
Q Q Q
LOS/PCN/BUR/INF/R. 3
Español
Página 14
3.
a)
Fijación
de posiciones
Sistema de satélites de navegación
d e la Armada
(NNSS)
El Sistema de Satélites de Navegación de la Armada (NNSS) se utiliza para
determinar la posición exacta de un buque que se precisa para ubicar la trayectoria
de prospección, determinando los puntos inicial y final de la prospección, la
posición del buque cada 30 minutos y sus puntos de viraje, y las posiciones de
muestreo, entre ellas los puntos donde se botan y se recobran las mordazas en caída
libre, así como los puntos en que las palas sacatestigos y las mordazas Okean se
botan, toman contacto con el fondo del mar y se recobran.
Actualmente se dispone de cuatro satélites, que actualizan sus datos cada dos
horas en promedio.
Utilizando los datos de posición de un buque obtenidos de esta
forma se c o n f e c c i o n a n cartas de navegación y mapas de sitios de muestreo.
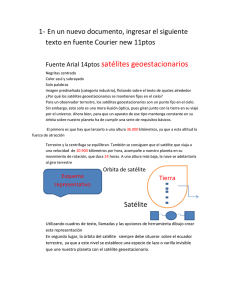
Figura
3.
ConJmnto de órbitas de los satélites
(según el catálogo de Magnavox)
TRANSIT
/...
LOS/PCN/BUR/INF/R o 3
Español
Página 15
El sistema de la antena y el preamplificador recibe dos señales de uno de los
satélites en el sistema de navegación TRANSIT.
Las señales son amplificadas por el
preamplificador y se dirigen a la consola.
La consola utiliza la información del
satélite para calcular la latitud y la longitud con una precisión de aproximadamente
30 m, y la Hora Media Universal con una precisión mayor de 1 seg.
Después de haber
detectado un satélite una vez, el dispositivo de rastreo programado del sistema
predice cuándo el satélite estará de nuevo disponible y lo buscará en el momento
oportuno.
A su vez, cada satélite detectado se almacenará en la memoria del
sistema de modo que el rastreo programado a la larga podrá recurrir a todos los
satélites disponibles.
Entre las posiciones de referencia de los satélites, el sistema navega
automáticamente por estima, basándose en datos de la velocidad y el rumbo del
buque.
Los datos de la velocidad y el rumbo se determinan a partir de la corredera
de velocidad del buque y de la brújula giroscópica.
El proceso de estima también
su utiliza para describir el movimiento de un buque durante cada tránsito de un
satélite.
Luego de calcular la posición de referencia, se aplican ajustes en
latitud y longitud, rectificando así el error de estima acumulado.
La figura 4 es
un ejemplo del rumbo real de un buque.
El rumbo calculado por estima, como se
exhibe en el sistema, adolecerá de cierto error de posición.
Luego de calcular la
posición de referencia del satélite, la posición exhibida se corregirá de acuerdo
con dicha posición de referencia, que tiene una precisión de aproximadamente 30 m.
El sistema también exhibe el tiempo de estimar que es el lapso transcurrido
desde la última actualización de la posición del satélite.
Esta es una medida
cualitativa de la precisión de la navegación, ya que muestra por cuánto tiempo
el sistema ha dependido únicamente de los sensores de la navegación de estima.
Rumbo por e~tima
Rumbo real del buque
A/
, /
Figura h.
~
~
/
~
P o s i c i o n e s de referencia
de los sat~l~tes
Rumbo sor estima y rumbo real de un buque
($egnín el catálogo de Ma~navox)
LOS/PCN/BUR/INF/R. 3
Español
Página 16
Los satélites
un período de 107
trazan una figura
y convergentes en
TRANSIT giran en torno a la Tierra en órbitas polares de
minutos a una altitud de 600 millas náuticas.
Las órbitas
parecida a las tajadas de una naranja, ensanchadas en el ecuador
los polos.
Los satélites giran en torno a la Tierra de un polo al otro, pero sus órbitas
no rotan con la Tierra.
En consecuencia, las seis órbitas dan la idea de una
"pajarera" esférica estacionaria dentro de la cual la Tierra gira sobre su eje.
Así pues, cada punto de la superficie terrestre pasa bajo cada una de las seis
órbitas aproximadamente dos veces al día.
Cada satélite transmite continuamente su posición c o m o función del tiempo.
Midiendo la variación de la frecuencia Doppler de las señales recibidas a medida
que el satélite se acerca, pasa y va quedando atrás, se puede fijar c o n gran
precisión la posición del buque con respecto a la trayectoria del satélite.
La
precisión con que se puede fijar la posición de referencia del satélite utilizando
este sistema tiene un valor típico de menos de 30 m.
Los errores en la velocidad
de un buque pueden introducir nuevas fuentes de error.
Los errores acumulados
en la navegación de estima luego de dos horas deberían dar como resultado una
precisión en la posición de 2.000 m en la mayoría de las condiciones en el mar.
b)
Sistema
mundial
de fijación
de posiciones
(GPS)
La DORD proyecta incorporar el sistema GPS para el cálculo continuo de la
posición a fin de reemplazar el actual método NNSS.
Sin embargo, solamente se han
lanzado seis de los 18 satélites proyectados, lo que impedirá a la DORD utilizar el
sistema GPS durante toda la prospección.
Cuando pase a ser totalmente operacional, el GPS será un sistema continuo y
mundial de navegación y determinación de posiciones.
Proporcionará información
tridimensional precisa
sobre fijación de posiciones, navegación y tiempo para
aplicaciones en tierra, mar y aire.
Los satélites operacionales del GPS estarán
distribuidos en forma pareja en seis planos orbitales, a alturas de cerca
de 6. 060 m.
Los datos de navegación determinados a partir de la se~al de un satélite
contienen datos orbitales precisos del satélite, tiempo del sistema, datos sobre la
marcha del reloj del satélite y mensajes sobre condiciones.
Los datos orbitales
del satélite realmente se representan dos veces en un mensaje de navegación
completo.
Se presentan parámetros orbitales precisos para el satélite transmisor
(efemérides) y datos menos precisos para todos los demás satélites posibles
(almanaque).
Se necesitan 12 1/2 minutos para transmitir este juego completo
de datos.
/QOO
LOS/PCN/BUR/INF/R. 3
Español
Página 17
La determinación efectiva de la posición del usuario supone el empleo de las
efemérides para calcular la posición de cada satélite que se utiliza en el momento
en que se transmite cada se~al del satélite.
El tiempo que requiere la se~al
para llegar al usuario se determina, salvo las imprecisiones en los relojes que
intervienen, mediante la sincronización del receptor con el código de C/A generado
por el satélite.
A continuación pueden determinarse seudovalores de la distancia
multiplicando las sumas de los • tiempos de propagación y los errores en los relojes
por la velocidad de la luz.
Precisión de la navegación:
Error de posición 2D de 35 m, 90% de probabilidad (dependiendo de los
satélites disponibles, la distorsión geométrica de la precisión y la calidad del
funcionamiento del componente de control y el componente espacial).
/Q
O •
~~~
~~r~
oo
k
/
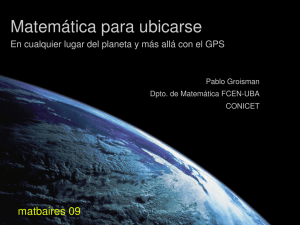
AGN
AGN
SBP
NBS
= pistola de aire
POR
~
~- 1000m
MFES = sistema de exploración
de multi frecuencia
I
I
I
•BP
= determinador de perfile$
del s .mbsmelo
I
I
I
PDR
= registrador de p r o f m n d i d a d
de oreczszon
NBS
~-- 2000m
~-- 3000m
= sonda de haz estrecho
C. . . . . . . .
/
/
/
angm±on ce ctraga
.......
M o r d a z a en
caída libre
~
Sacatest~~os
en ca~da libre
~4
I
I
I
I-- 4000m
'
',
I
J
~
..:~...:~¿.i~~~:~.~.~.~~:.~:.~~~~.~~~:~.~:~~~..-¿~...~~~.:.~~.~..`.~.~~.~.4..~~~~...~......:..~.:..;.....
. Pala
-- ....
Figura 5
5000m
i
sacatest~=~=l
~"
~
~ Saca testi~os !
de o i a t o n
'
~
"
~
H
NN$~ .v GPS
Loran C
0
~ .
~!i!!¿iiiii~i!~iiiiii!i!iii!~
::i i ~========================================
i !:! i!!iii!!!i!!!!i!¡i;~i!i!¡i!!iiii~i!iii!!!:i!!ii!i!:
"