Solución
Anuncio

Examen de Investigación Operativa
(Plan 96)
Febrero de 2010
Final
Solución del Ejercicio 1.
De…nimos las variables de decisión
xi =
1; si se coloca una cámara en el punto de localización i
; i = 1; : : : ; 10
0; si no
El objetivo es poner el menor número de cámaras, por lo que la función objetivo es:
M in x1 + x2 + x3 + x4 + x5 + x6 + x7 + x8 + x9 + x10
Con la condición de que estén todos los sectores cubiertos, por ejemplo, para cubrir el sector 1 hay que poner
obligatoriamente una cámara en el punto 4, para cubrir el sector 2 tendría que haber una en los puntos 4 o 5..
x4 1
x4 + x5 1
x8 1
x6 + x8 1
x6 + x8 + x10 1
x6 1
x9 1
x7 + x9 1
x7 + x10 1
x7 + x9 + x10 1
x1 + x3 1
x1 + x2 + x3 1
x2 + x3 1
Como se debe cumplir que si no se coloca ninguna cámara en la posición 2 hay que colocar una obligatoriamente
en la posición 3, hay que introducir la restricción
x3
1
x2
Por lo tanto, el problema queda modelizado de la siguiente forma
M in
s:a
x1 + x2 + x3 + x4 + x5 + x6 + x7 + x8 + x9 + x10
x4 1
x4 + x5 1
x8 1
x6 + x8 1
x6 + x8 + x10 1
x6 1
x9 1
x7 + x9 1
x7 + x10 1
x7 + x9 + x10 1
x1 + x3 1
x1 + x2 + x3 1
x2 + x3 1
x3 1 x2
xi = 0; 1; i = 1; : : : ; 10
.
Solución del Ejercicio 2
1
a) El programa primal en la forma simétrica de maximización es
max z 0
s. a
=
2x1 + 2x2
x03 + x003
2x1 + x2 x03 + x003 4
x1 + x2 1
x1 + x03 x003 4
x1 x03 + x003
4
x1 ; x2 ; x03 ; x003 0
Planteamos en la tabla que sigue los cambios en el paso del problema primal (original) en formato simétrico
de maximización al dual en formato simétrico de minimización, con las condiciones
Problema
Primal
Dual
4 variables de decisión (x1 ; x2 ; x03 ; x00
)
!
4
restricciones
3
4 restricciones
! 4 variables de decisión (y1 ; y2 ; y3 ; y4 )
objetivo de max imización (z 0 )
! objetivo de minimización (w0 )
0
z (2; 2; 1; 1)
! recursos (2; 2; 1; 1)
restricciones del tipo
! restricciones del tipo
Matriz tecnológica A
! Matriz tecnológica AT
recursos (4; 1; 4; 4)
! coe…cientes de w0 (4; 1; 4; 4)
y el problema dual en la forma simétrica es
min w0
s. a
=
4y1 + y2 + 4y3
4y4
2y1 y2 + y3 y4 2
y1 + y 2 2
y1 + y 3 y 4
1
y1 y 3 + y4 1
y1 ; y 2 ; y 3 ; y 4 0
c) Para obtener la solución óptima expresamos el problema original en el formato estándar de maximización.
Para ello, hacemos el cambio de variable x3 = x+
x3 , para sustituir la variable no restringida por variables no
3
negativas y, además, introducimos dos variables de holgura x4 y x5 y una arti…cial x6 . El programa lineal toma
la forma
M x6
max z 0 = 2x1 + 2x2 x+
3 + x3 + 0x4 + 0x5
s. a
2x1 + x2 x+
3 + x3 + x4 = 4
x1 + x2 + x5 = 1
x1 + x+
x3 + x6 = 4
3
x1 ; x2 ; x+
0
3 ; x3 ; x4 ; x5 ; x6
La tabla inicial del símplex es
cB
0
0
M
cj !
VB
x4
x5
x6
zj cj
2
x1
2
1
1
2
M
2
x2
1
1
0
2
1
1
0
1
1 M
1
x3
1
0
1
1+M
M; z2
c2 =
2 y z3 +
x+
3
0
x4
1
0
0
0
0
x5
0
1
0
0
M
x6
0
0
1
0
xB
4
1
4
4M
Como hay costes reducidos negativos
z1
c1 =
2
c3+ = 1
M
la tabla no es óptima y aplicaremos el método del símplex para tratar de alcanzar la optimalidad. El valor
indicador más negativo corresponde a la variable x1 (z1 c1 = 2 M ), siendo por tanto y1 la columna pivote.
La mínima razón es el cociente xB1 =y11 = 4=2 = 2 y por tanto y11 = 2 es el elemento pivote. La transformación
2
de pivote del método del símplex, en la que x1 es la variable de entrada en la base y x4 la variable de salida de la
base, conduce a la nueva tabla
cB
2
0
M
cj !
VB
x1
x5
x6
zj cj
2
x1
1
0
0
0
2
x2
1=2
3=2
1=2
1 + M=2
1
x+
3
1=2
1=2
3=2
3M=2
1
x3
1=2
1=2
3=2
1 + M=2
0
x4
1=2
1=2
1=2
0
0
x5
0
1
0
0
M
x6
0
0
1
0
xB
2
3
2
4 2M
Como hay un valor indicador negativo (z3+ c3+ = 3M=2) es posible la mejora. El elemento pivote es
y34 = 3=2 y la transformación de pivote conduce a la tabla
cB
2
0
1
cj !
VB
x1
x5
x+
3
zj cj
De nuevo es posible la mejora (z2
pivote conduce a la tabla
cB
2
2
1
cj !
VB
x1
x2
x+
3
zj cj
2
x1
1
0
0
0
c2 =
2
x1
1
0
0
0
2
x2
1=3
4=3
1=3
1
1
x+
3
0
0
1
0
1
x3
0
0
1
0
0
x4
1=3
1=3
1=3
1
0
x5
0
1
0
0
M
x6
1=3
1=3
2=3
M
xB
2.b
6
3.b
6
1.b
3
4
1 < 0), siendo el elemento pivote es y22 = 4=3. La transformación de
2
x2
0
1
0
0
1
x+
3
0
0
1
0
1
x3
0
0
1
0
0
x4
1=4
1=4
1=4
1.25
0
x5
1=4
3=4
1=4
0.75
M
x6
1=4
1=4
3=4
0.25 + M
xB
1.75
2.75
2.25
6.75
y como todos los valores indicadores son no negativos y no hay variables arti…ciales en la base con valor positivo,
hemos alcanzado la optimalidad. La solución óptima es
x1 = 1.75; x2 = 2.75; x+
3 = 2.25 y x3 = 0 ) x3 = 2.25 y x4 = x5 = x6 = 0;
con z 0 = 6:75 ) z =
6:75.
c) La solución óptima alcanzada no es única porque el coste reducido de la variable no básica x3 es nulo. Sin
embargo, como todos los elementos del vector y3 son menores o iguales que 0, lo que tenemos es un rayo óptimo.
d) El valor óptimo de la función objetivo del dual es el mismo que el del primal (Relaciones en dualidad),
w = z = 6:75.
e) Sustituyendo la solución óptima en la restricción obtenemos 2x1 + 2x2 + 2x3 = 3:5 + 5:5 + 4:5 = 13:5. Por lo
tanto, la solución actual sigue siendo óptima.
f ) Teniendo en cuenta la forma de la nueva función objetivo, min z = x1 + x2 , al ser ambas variables no negativas,
z = 0 si x1 y x2 son cero mantiéndose la factibilidad. La segunda restricción se estaría satisfaciendo, pero la
primera y la tercera dependerían del valor óptimo de x3 . De la tercera restricción, obtenemos que si x1 = 0;
entonces x3 = 4, valor para el cual la primera restricción también se satisface. Por lo tanto, la solución óptima es
x1 = 0; x2 = 0; x3 = 4;
con z = 0.
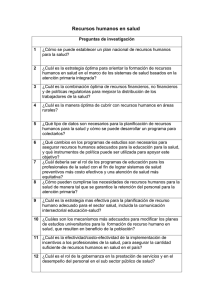
Solución del Ejercicio 3.
a) El diagrama de transición de la cadena es
3
Las clases de equivalencia son las siguientes:
Clase
f0; 5; 8g
f1; 4; 7g
f3g
f2; 6g
Recurrente
Sí
Sí
No
No
Periódica
Sí (2)
No
No
No
b) Teniendo en cuenta que la matriz de probabilidades de transición de la clase f1; 4; 7g es:
0
1
3=4 1=4
0
@1=4 1=2 1=4A
0
1=4 3=4
la probabilidad a largo plazo de encontrarnos en los estados de la misma se obtiene de la siguiente expresión:
0
1
3=4 1=4
0
= P ) ( 1 ; 4 ; 7 ) = ( 1 ; 4 ; 7 ) @1=4 1=2 1=4A )
0
1=4 3=4
= 3=4 1 + 1=4
4 = 1=4 1 + 1=2
7 = 1=4 4 + 3=4
1+ 4+ 7 =1
1
4
4
+ 1=4
7
9
>
>
=
>
>
;
7
)
Los valores demandados son precisamente estas probabilidades.
8
<
:
1
4
7
= 1=3
= 1=3
= 1=3
c) Suponiendo que se parte del estado 1, el tiempo que tarda en promedio en volver al estado 1 es.m1 = 1=
iteraciones:
1
=3
d) f1; 4; 7g es recurrente, f0; 3; 5; 8g y f2; 6g son transitorias. La respuestas a los apartados b) y c) para este caso
son las mismas que antes ya que f1; 4; 7g continúa siendo una clase de equivalencia.
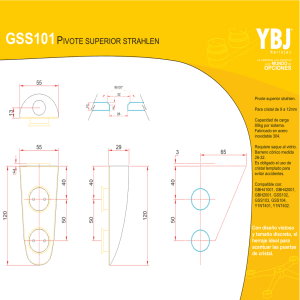
Solución del Ejercicio 4.
4/2
01
2
1
11
1
34
3/22/2½
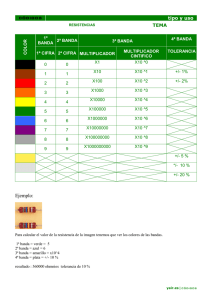
El problema puede ser modelizado como un modelo de colas en el que cada nodo represente el número de aviones
que están en el hangar. Por lo tanto, el diagrama de transicíón es
4
Para calcular la distribución de equilibrio tenemos que resolver el sistema de ecuaciones:
9
1
9
2 0= 1
>
0 = 1+2+3+3+3=2 =
>
2
=
>
>
0
1
3
>
>
4
1+ 2 1 =2 0+ 2
>
>
3
>
>
1 = 21
=
=
2 1 = 2
(1 + 1) 2 = 32 1 + 3
2
)
)
2 = 7
2 = 3
1 + 12 3 = 2 + 4
>
>
1
>
>
2
>
>
1
2 3 = 4
>
>
3 = 7
>
;
4 = 2 3
>
;
1
0 + 01 + 2 + 3 + 4 = 1
4 = 7
0 + 01 + 2 + 3 + 4 = 1
2
21
9
>
>
>
>
>
=
>
>
>
>
>
;
a) El número de aviones disponibles es 4-L donde
L=
1
+2
2
+3
3
+4
4
=
4
4 6 4
46
= 2:19 aviones.
+ + + =
21 7 7 7
21
Por lo tanto, el número de aviones disponibles es 4
no esté garantizado.
L=4
2:19 = 1:81 aviones < 2, de ahí que el servicio
b) El coste medio total es el coste medio de servicio más el coste medio de espera.
Teniendo en cuenta que el coste de cada técnico es de 300 e por día de trabajo, el coste medio de servicio es
(1
0)
número de técnicos
precio/día =
1
2
21
4
300 =
7600
= 1085:7 e=d{a:
7
Teniendo en cuenta que a la compañía le cuesta 1000 e por día que cada avión pasa en el hangar, el coste
medio de espera es
coste por avión/día
L = 1000 2:19 = 2190e=d{a:
Por lo tanto, el coste medio total por día es 1085.7 + 2190 = 3275.7 e por día.
5