Control de Plantas con Retardo
G p ( z ) = bz −d
ó
yk = buk −d
si hay una dinámica adicional
b1 z −1 + L + bm z − m
Gp ( z) =
z −d
−1
−m
1 + a1 z + L + am z
se puede expresar con todos los bi=0
en variables de estado resulta
xk +1 = Ax k + Bu k − d
yk = Cxk
se puede incluir el retardo en A
xk +1 = Ax k + Bu k
yk = Cxk
o a la salida
xk +1 = Ax k + Buk
yk + d = Cxk
Control con Predictor
diseño razonable para una planta con retardo:
en l.c. debe tener la misma dinámica que en lazo abierto pero con ganancia unitaria.
GM ( z ) =
1
1 B( z ) − d
Gp (z ) =
z
kp
k p A( z )
y el regulador resulta
Gr (z) =
1
A(z)
=
=
k p − Gp ( z) k p A( z) − B( z)z−d
1+ a1z−1 +L+ am z−m
=
k p + kp a1z−1 +L+ (k pa1+d − b1 ) z−1−d + L+ bm z−m−d
la ecuación característica queda
zd zm A( z) = zd [zm + a1zm−1 +L+ am−1z + am ] = 0
1
que queda igual a la del sistema de partida con lo que solo se puede aplicar a sistemas
estables.
Para evitar la fuerte sensibilidad del predictor al retardo se usa la modificación de Smith.
En lazo cerrado
GM ( z ) =
1
G p ( z )G ′( z )
kp
en donde G' tiene un retardo adicional y el regulador resulta
Gr (z) =
G′( z)
k p − Gp ( z)G′(z)
G' puede ser un sistema de primer orden
-
no se puede diseñar reguladores con realimentación del estado sin incluir el retardo en
la matriz A. Esto hace que aumente en d el tamaño de A
Control de un Retardo Puro
Gp ( z) =
Y (z )
= bz −d
U ( z)
tanto el regulador en tiempo finito como el predictor dan el mismo resultado
Gr (z) =
1 1
b 1− z−d
o la ec en dif
uk = uk −d + q0ek
q0 = 1
b
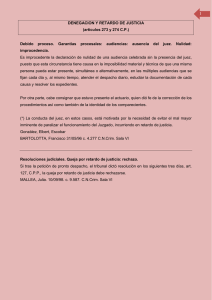
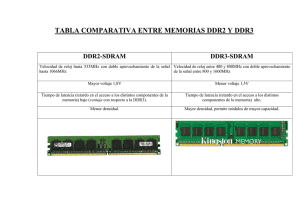
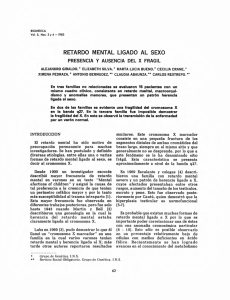
la respuesta al escalón es similar a un PI con los saltos del ancho del retardo
2
12
10
8
6
4
2
0
0
5
10
15
20
25
30
se podría aproximar a un PI de la siguiente forma
uk = uk −1 + q′0ek + q1′ek −1
q0 1
=
2b
2
1 d −2
1 1
q′0 = q0 − = −
2b d
d 2
q′0 =
o en su forma más común
kp = q′0 = 1
2b
q′ + q′ 2
ki = 0 1 =
q0′
d
la ec. característica a lazo cerrado es
1 + Gr ( z ) G p ( z ) = z − d
si no se conoce con exactitud el retardo, por ejemplo creemos que es d pero la planta tiene
un retardo de d+1
1 1
bz −d −1 =
−d
b 1− z
= 1 − z −d + z −d −1 = z d +1 − z + 1 = 0
1 + Gr ( z ) G p ( z ) = 1 +
las raices estarán fuera o sobre el círculo unidad.
3
Si el retardo de la planta es d-1
zd + z −1 = 0
en este caso la inestabilidad aparece para d mayor o igual a 2
Resumen:
este control es muy sensible a las variaciones del retardo.
si implementamos el PI equivalente es menos sensible.
q0′ + q1′z −1 −d
1 + G pi ( z )G p ( z ) = 1 +
bz =
1 − z −1
= 1 − z −1 + bq′0 z −d + bq1′z −d −1 = z d +1 − z d + bq0′ z + bq1′ = 0
si se reemplazan los valores de q resulta
2 z d +1 − 2 z d + z −
d −2
=0
d
para un cambio de d a d-1 resulta
2 z d − 2 z d −1 + z −
d −2
=0
d
es siempre estable
es preferible diseñar para un retardo mayor
4
 0
0